Робот и кубик Рубика — презентация онлайн
Похожие презентации:
Пиксельная картинка
Информационная безопасность. Методы защиты информации
Электронная цифровая подпись (ЭЦП)
Этапы доказательной медицины в работе с Pico. Первый этап
История развития компьютерной техники
От печатной книги до интернет-книги
Краткая инструкция по CIS – 10 шагов
Информационные технологии в медицине
Информационные войны
Моя будущая профессия. Программист
МБОУ
«Гимназия №1»
Кубик Рубика
Выполнила
ученица 4 класса «В»
Васильева Анна
г. Ноябрьск
2015г.
Цель
•Научиться самостоятельно решать
технические задачи
• Сделать робота, который собирает
Кубик Рубика
Задачи
• Провести
обзор литературы и поиск
информации в интернете
• Собрать робота согласно найденным схемам и
картам
• Сделать презентацию по теме работы
• Презентовать свою работу одноклассникам
Правила техники безопасности и
организация рабочего места
* Расстояние от глаз до экрана монитора должно
быть не меньше 60-70 см, а рабочее место хорошо
освещено
* Убрать с рабочего стола все лишние предметы.
Мелкие детали конструктора лучше положить в
специальные контейнеры
* ЗАПРЕЩАЕТСЯ!
Класть на корпус компьютера посторонние
предметы
* ЗАПРЕЩАЕТСЯ!
Работать на компьютере мокрыми руками
* ЗАПРЕЩАЕТСЯ!
Работать
на
компьютере,
имеющем
видимые дефекты и самому устранять
неполадки
Существует 3 правила робототехники, которые сформулировал
в 1942 году автор научно-фантастических произведений Айзек
Азимов в своем рассказе «Хоровод»
Робот не может навредить человеку или, бездействуя,
допустить, чтобы человеку был нанесен вред
Робот должен подчиняться приказам, которые дает ему
человек за исключением случаев, когда такие приказы
противоречат первому правилу
Робот должен защищать свое существование до тех пор,
пока эта защита не противоречит первому или второму
правилу
Поиск информации
Tilted Twister (так был назван
робот) решает Кубик Рубика полностью
автоматически.
Световой датчик сканирует кубик
и определяет его цвета.
Затем
программа
вычисляет
последовательность вращений (шагов) для
решения и выполняет повороты кубика
На своём сайте, Ханс Андерссон
опубликовал инструкцию по сборке такого
робота из специального набора Lego
Mindstorms.
По этой инструкции я собрала
своего робота
Необходимые для работы инструменты и
материалы
Кубик Рубика
Конструктор Lego Mindstorms
Компьютер
Технологическая карта
Технологическая последовательность сборки робота
себя два этапа
I этап
Сборка
Сборка узлов двигателей
(3 узла)
Установка ультразвукового
датчика
Установка контроллера
Сборка и установка поворотной
платформы
Сборка и установка устройства
переворота кубика
Сборка и установка датчика
опознавания цвета
включает в
II этап
Программирование
контроллера
Подключить контроллер к
компьютеру посредством
USB кабеля
Запустить программу
LEGO MINDSTORMS
NXT Education
Загрузить исполняемую
программу в контроллер.
Отключить USB кабель
I ЭТАП
Сборка
Сборка узлов двигателей
(3 узла)
Установка ультразвукового
датчика
I ЭТАП
Сборка
Установка контроллера
Сборка и установка
поворотной платформы
I ЭТАП
Сборка
Сборка и установка
устройства переворота
кубика
Сборка и установка датчика
опознавания цвета
II ЭТАП
Программирование
контроллера
Подключить контроллер к
компьютеру посредством USB
кабеля.
Запустить программу LEGO
MINDSTORMS NXT Education
Загрузить исполняемую
программу в контроллер
Отключить USB кабель
Схема сборки робота Tilted
Twister
Технологическая карта
Результат
Интересно, что этот робот
работает
без
подключения
к
компьютеру, то есть вычисляет
алгоритм решения с помощью своего
процессора
Первая версия алгоритма
собирала кубик Рубика за 97 шагов.
Применяя различные комбинации,
Ганс Андерсон уменьшил количество
шагов до 60
Что в итоге?
В итоге — Лего-робот, который
собирает Кубик Рубика быстрее
чем это можете сделать вы!
Реклама
Живи в современном мире!
Собирает Кубик Рубик
Вычисляет сложный ход
Лучше всех он в этом рубит
Все решения найдет!
Ваша цель –
моё
решение!
Экологическое обоснование
Робот использует чистый вид
энергии.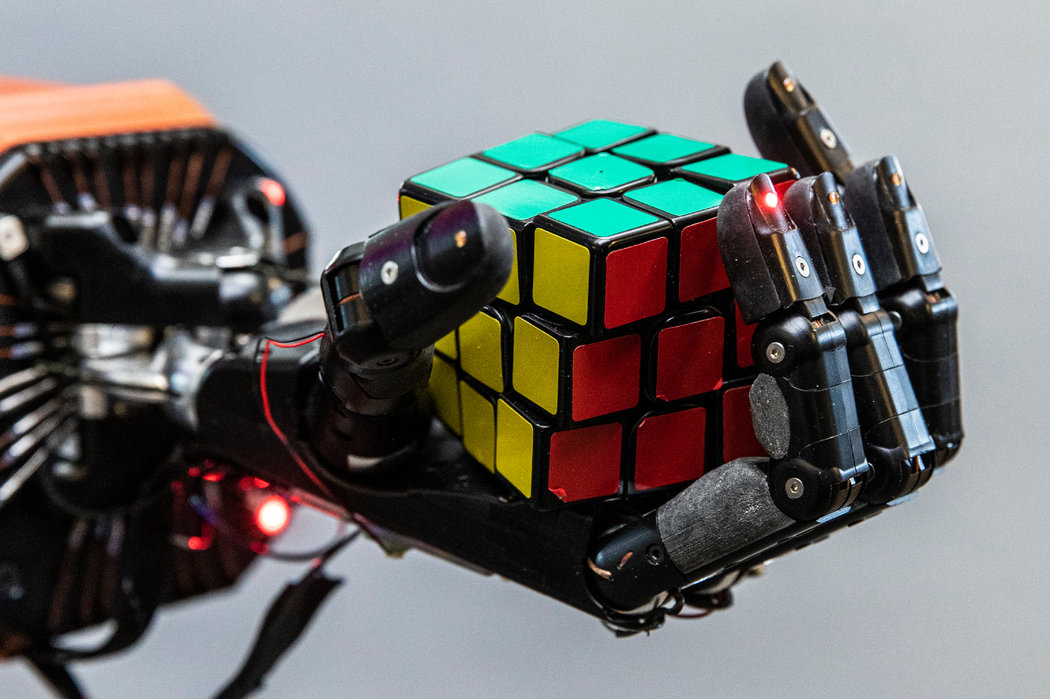 Электричество не загрязняет
Электричество не загрязняет
окружающую среду и не имеет
вредных выбросов в атмосферу
Робот (детали конструктора
Lego Mindstorms)
выполнен
из
экологически чистых компонентов
Благодаря тихой работе, робот
не загрязняет окружающую среду в
шумовом диапазоне
Аккумуляторы, используемые
для питания робота, всегда можно
сдать на утилизацию в специальные
пункты
Экономическое обоснование
Несмотря на немалую стоимость конструктора
Lego Mindstorms, вложенные средства напрямую
инвестируются в будущее
Ребенок,
который
с
ранних
лет
изучает
программирование, кибернетику
и робототехнику, как правило, в
будущем может рассчитывать на
более
высокооплачиваемую
работу
Технически образованные дети
— будущее экономики нашей страны!
Самооценка
В ходе проекта я:
Определяла цели, ставила и
решала задачи
Анализировала, делала
выводы
Задавала вопросы, искала
факты, находила ответы
Находила и исправляла
ошибки
Преодолевала трудности,
добивалась достижения
результата
Я рада, что у меня получилось такое сложное и
кропотливое дело. Что довела его до конца несмотря
Что довела его до конца несмотря
на трудности, что много раз хотелось бросить или
отложить, но я с собой справилась
Вывод
Варианты роботов, которые можно
собрать из конструктора Lego Mindstorms
З
ВН
И
МА
Н
И
Е!
Использованные интернет ресурсы
tiltedtwister.com — Официальный сайт Ханса Андерссона, где
размещена подробная инструкция по сборке робота Lego
Mindstorms NXT и исходные коды программы для него
http://legocomp.ru/2011/01/a-postroyu-ya-segodnya-robota-kotoryj-bysobiral-kubik-rubika/- детская технологическая школа ЛЕГОКОМП
http://androbots.ru/robototehnika/roboty_i_chelovek/roboty_v_zhizni.php Все о роботах. Роботы в жизни человека
English
Русский
Правила
Рука робота собрала кубик Рубика, но восстание машин откладывается
Компания OpenAI создала робота, который спустя 10 000 симуляционных лет тренировок научился собирать кубик Рубика. Эксперимент показывает, что до превосходства роботов над человеческим интеллектом пока далеко.
Робот собрал кубик Рубика за 10 тысяч лет, что это значит?
Исследовательская компания OpenAI из Сан-Франциско показала роботизированную систему Dactyl, которая научилась собирать кубик Рубика. Система состоит из человекоподобной руки британской компании Shadow Robot Company, которая подключена к мощной компьютерной системе, множеству камер и других датчиков.
Компания заявила, что ловкость робота «близка к человеческой». На видеозаписи машина без особых усилий поворачивает кубик, и у пользователей сложилось впечатление, что это доказательство революции в роботостроении.
В прошлом году OpenAI показала, что Dactyl научился вращать куб в руке, используя движение, изученное в процессе подкрепления. Чтобы решить головоломку, робот не стал полностью полагаться на обучение подкреплением — ему помог более традиционный алгоритм решения головоломки. Хотя сам Dactyl оснащен несколькими камерами, робот не может видеть каждую сторону куба. Поэтому разработчикам пришлось спроектировать специальный кубик, оснащенный датчиками, чтобы робот понимал, как расположены квадраты.

Это начало восстания машин?
Успехи компании оказались не настолько впечатляющими. В восьми случаях из десяти робот просто уронил кубик. Чтобы научиться им манипулировать, Dactyl потребовалось 10000 симулированных лет тренировок.
— Я не сказал бы, что это ажиотаж. Но люди будут смотреть на это видео и думать: «Боже мой, следующим будет тасование карт и другие вещи», а это не так, — говорит Кен Голбдерг, робототехник из Калифорнийского университета в Беркли.
— Знаете ли вы шестилетнего ребенка, который роняет кубик Рубика в 80% случаев? — иронизирует Гэри Маркус, ученый-когнитивист, который критикует шумиху вокруг искусственного интеллекта.
По сути, ролик — это демо-версия с бизнес-задачами. Компании и университеты размещают впечатляющие промо продуктов, которые захватывают воображение публики и приводят к появлению интригующих заголовков в прессе. Это маркетинговый ход компаний, которые ожесточенно конкурируют на рынке за клиентов и финансирование.
Так что же в этом революционного?
Ловкость Dactyl специфична и ограничена: он может адаптироваться к небольшим изменениям, но без серьезной подготовки система не может подобрать кубик со стола, использовать другой захват или взять другой предмет. Настоящая инновация разработчиков на видео не продемонстрирована: как робот переносит обучение из симуляции в реальный мир.
Dactyl решает, как манипулировать тем или иным предметом, с помощью машинного обучения: он тренируется в управлении рукой сначала в симуляции и потом вживую. Бессмысленно тратить годы на отработку задания роботом, поэтому его обучение проводят в симуляторе. Но часто бывает трудно перевести движения из симуляции в реальность, когда малейшее трение или шум могут сбить робота с толку.
Инновация заключается в том, что разработчики добавили в симуляцию помехов и шумов, чтобы система научилась быть более устойчивой.
С роботами все безнадежно?
Есть и другие обнадеживающие примеры. DeepMind, дочерняя компания Alphabet, использовала машинное обучение для тренировки своей программы AlphaGo, чтобы научить ее играть в настольную игру го лучше, чем игроки-люди. В 2008 году эксперт в области искусственного интеллекта Эндрю Ын обучил беспилотники выполнять фигуры высшего пилотажа. Его ученик Питер Абель спустя несколько лет научил робота складывать полотенца. Хотя коммерческая выгода этой технологии не была очевидна, выглядело это многообещающе.
В 2008 году эксперт в области искусственного интеллекта Эндрю Ын обучил беспилотники выполнять фигуры высшего пилотажа. Его ученик Питер Абель спустя несколько лет научил робота складывать полотенца. Хотя коммерческая выгода этой технологии не была очевидна, выглядело это многообещающе.
Самое убедительное доказательство, что роботы пока не слишком ловки, — это небольшой диапазон задач, которые они могут выполнять на производстве. Компания Tesla с трудом внедряет автоматизацию на своих заводах, а компания Foxconn не смогла добиться того, чтобы роботы выполняли большую часть кропотливой работы по выпуску iPhone и других гаджетов.
По мнению одного из пионеров робототехники Родни Брукса, научная работа, связанная с машинным обучением роботов, пока еще далеко от того, чтобы быть коммерчески полезной.
OTVINTA.com: Полностью напечатанный на 3D-принтере робот для сборки кубика Рубика
OTVINTA.com: Полностью напечатанный на 3D-принтере робот для сборки кубика Рубика — Главная
Идеальная машина для ознакомления детей с робототехникой
У этого робота есть все, что есть у любого серьезного робота: руки, сервоприводы, шестерни, зрение, искусственный интеллект и задание, которое нужно выполнить.
Если вы хотите познакомить своих детей или учеников с робототехникой, эта машина идеально подходит для этого.
Распечатать детали
Приготовьтесь потратить до 70 часов времени печати и целую катушку филамента, чтобы напечатать этот 14-дюймовый гигант.
Заказ оборудования
Вам понадобятся 8 серводвигателей, сервоконтроллер, веб-камера, болты и гайки, а также, при желании, Raspberry PI 3.
Установка программного обеспечения
Приложение для робота предназначено для работы как с Raspberry PI под управлением Windows IoT, так и с
обычный ПК с Windows 10.
Полностью напечатанный на 3D-принтере
Помимо сервоприводов, серворегуляторов, электроники и нескольких десятков болтов и гаек, этот робот не имеет ни одной традиционно изготовленной детали.
Если у вас есть 3D-принтер, меньше 200 долларов и немного терпения, эта умная и красивая машина может украсить ваш рабочий стол на радость всем.
Отзывы клиентов
Сотни людей по всему миру построили нашего робота, собирающего кубик Рубика, и все они очень довольны! Вот некоторые из предложений, которые мы получили от наших клиентов:
Великолепно! Работал первый раз.
Лучший проект, который я построил.
 Лучший проект, который я построил.
Лучший проект, который я построил.— Мэтью Ф.
Огромный дай пять (сделай десять!) О.Т. Vinta за публикацию одного из самых интересных и творческих проектов, которые я когда-либо видел на Thingiverse.
— Крис К.
Решатель кубика Рубика от OTVINTA — отличный образовательный проект. Его указания и детали, необходимые для завершения комплекта, безупречны. Модель работает идеально.
— Крис Р.
Любовь, любовь, любовь — сработало сразу!! Сдулся!!
— Скотт К.
Веселый проект, который завораживает людей! Также очень хорошо документировано и продумано.
— Джон Х.
Отличный дизайн и забавная сборка. Я получил отличную поддержку в виде otvinta3d.
— Брайан К.
Красивый проект! Работает очень хорошо! Спасибо ОТВИНТА!
— Эрик К.
Отличный проект, мы с папой весело проводим время, делая его. otvinta3d оказал большую поддержку при его создании. Спасибо, что сделали это доступным!
— Пол С.
На 100% собран моим 9-летним сыном.
— Матье
Этот проект, его модели, вспомогательное программное обеспечение и даже уровень поддержки со стороны самого производителя были великолепны.
Это уникальная и сложная «вещь», но в целом стоящая попытка.
— Чак Р.
Как собрать робота для сборки кубика Рубика на Raspberry Pi

BricKuber — это робот для сборки кубика Рубика с открытым исходным кодом, который вы можете собрать самостоятельно.
ПРИМЕЧАНИЕ. Этот проект зависит от внешних библиотек, которым требуются обновления.
Мы хотели построить робота, собирающего кубик Рубика, с помощью Raspberry Pi. Вместо скорости мы пошли по пути простоты: если у вас есть Raspberry Pi, комплект BrickPi и стандартный комплект LEGO Mindstorms EV3 или NXT, вы сможете легко пойти по нашим стопам.
Программное обеспечение написано на языке программирования Python. Вы можете увидеть весь исходный код на Github здесь.
Предыстория
Кубик Рубика недавно начал возвращаться. Изобретенная в 1974 году, это самая продаваемая игрушка в мире. Но их решение требует размышлений, усилий и умения. . . так почему бы не позволить это сделать роботу? В этом проекте мы берем Raspberry Pi, BrickPi и набор LEGO Mindstorms и строим робота, собирающего кубик Рубика. Просто поместите несобранный кубик Рубика в решатель, запустите программу python, и ваш кубик Рубика собран!
В проекте используется Pi для непосредственного сборки кубика Рубика. BrickPi3 берет несобранный кубик Рубика, а Raspberry Pi делает снимок каждой стороны кубика Рубика с помощью камеры Raspberry Pi. Pi создает текстовую карту цветных квадратов, которая показывает, где они расположены на кубе. После полного отображения куба Pi использует библиотеку python «kociemba», чтобы наметить ходы, необходимые для сборки кубика Рубика. Эта информация используется Pi и BrickPi3 для сборки кубика Рубика с помощью двигателей LEGO. Результат: собранный кубик Рубика.
BrickPi3 берет несобранный кубик Рубика, а Raspberry Pi делает снимок каждой стороны кубика Рубика с помощью камеры Raspberry Pi. Pi создает текстовую карту цветных квадратов, которая показывает, где они расположены на кубе. После полного отображения куба Pi использует библиотеку python «kociemba», чтобы наметить ходы, необходимые для сборки кубика Рубика. Эта информация используется Pi и BrickPi3 для сборки кубика Рубика с помощью двигателей LEGO. Результат: собранный кубик Рубика.
BricKuber может собрать кубик Рубика менее чем за 2 минуты.

Инструменты и материалы
- BrickPi3 — мы будем использовать BrickPi для управления моторами LEGO, которые собирают кубик Рубика.
- Raspberry Pi — Pi будет выполнять обработку, фотографирование и управление BrickPi.
- Raspberry Pi Camera — камера Pi сделает снимок несобранного кубика Рубика.
- Ethernet-кабель – вам потребуется, чтобы ваша машина была подключена к Интернету. Если вы хотите сделать это через Wi-Fi, это тоже нормально!
- SD-карта Raspbian for Robots — программное обеспечение, на котором работает Raspberry Pi. Он поставляется с большей частью программного обеспечения, необходимого для этого руководства. Вы также можете скачать программное обеспечение бесплатно.
- Комплект LEGO Mindstorms EV3 (31313). Вам понадобится куча деталей LEGO, два больших двигателя, один серводвигатель и ультразвуковой датчик.
- Кубик Рубика. Мы нашли здесь один, который довольно свободно вращается. Вы можете использовать практически любой кубик Рубика 9x9x9.

Собери
Создание Солвера
Этот дизайн был вдохновлен дизайном MindCub3r для LEGO EV3. Чтобы собрать BricKuber, начните с сборки MindCub3r. Полные инструкции по сборке LEGO можно найти здесь.
Решатель кубика Рубика состоит из трех основных движущихся частей. Первая — это подставка для кубика Рубика. Второй — тасовщик, рука, которая используется для переворачивания кубика Рубика.
Первая — это подставка для кубика Рубика. Второй — тасовщик, рука, которая используется для переворачивания кубика Рубика.
Наконец, мы добавляем руку с камерой. В оригинальном дизайне MindCubr он удерживал датчик цвета EV3 над кубиком Рубика. В нашем модифицированном дизайне он держит камеру Raspberry Pi над кубиком Рубика. Мы используем два двигателя LEGO Mindstorms, чтобы манипулировать кубом: первый находится под колыбелью, чтобы вращать куб, а второй перемещает рычаг тасования, чтобы вращать куб вокруг противоположной оси.
Сборка BrickPi3
Инструкции по сборке BrickPi3 можно найти здесь. Нам нужно будет собрать корпус, прикрепить BrickPi3, Raspberry Pi, камеру Raspberry Pi, добавить SD-карту и добавить батареи. Чтобы упростить настройку программного обеспечения, Raspbian для роботов поставляется с большей частью программного обеспечения, которое вам нужно уже установить. Вам понадобится SD-карта объемом не менее 8 ГБ, и вы захотите расширить диск, чтобы он соответствовал полному размеру SD-карты.
Прикрепите модуль BrickPi3
Добавляем BrickPi3 в сборку LEGO. Мы использовали «крылья» LEGO EV3, чтобы поддержать BrickPi3 и выровнять его с корпусом BricKuber. Это хороший шаг, чтобы добавить батареи 8XAA в блок питания и прикрепить блок питания BrickPi3 к сборке LEGO. Для программирования вы можете подключить BrickPi3 через USB к Raspberry Pi, однако для перемещения двигателей вам потребуется питание с помощью блока питания.
Подключение двигателей к BrickPi3
Присоедините двигатель мешалки к порту двигателя «MD». Подсоедините двигатель базовой станции к порту «MA» на BrickPi3. Присоедините двигатель датчика камеры к порту «MC» (это меньший серводвигатель). Несмотря на то, что мы не будем перемещать камеру, вы можете отрегулировать положение камеры с помощью моторов.
Прикрепите камеру Raspberry Pi
Используя опору для камеры LEGO, прикрепите камеру. Маленькая черная линза камеры должна поместиться между двумя опорами балки LEGO.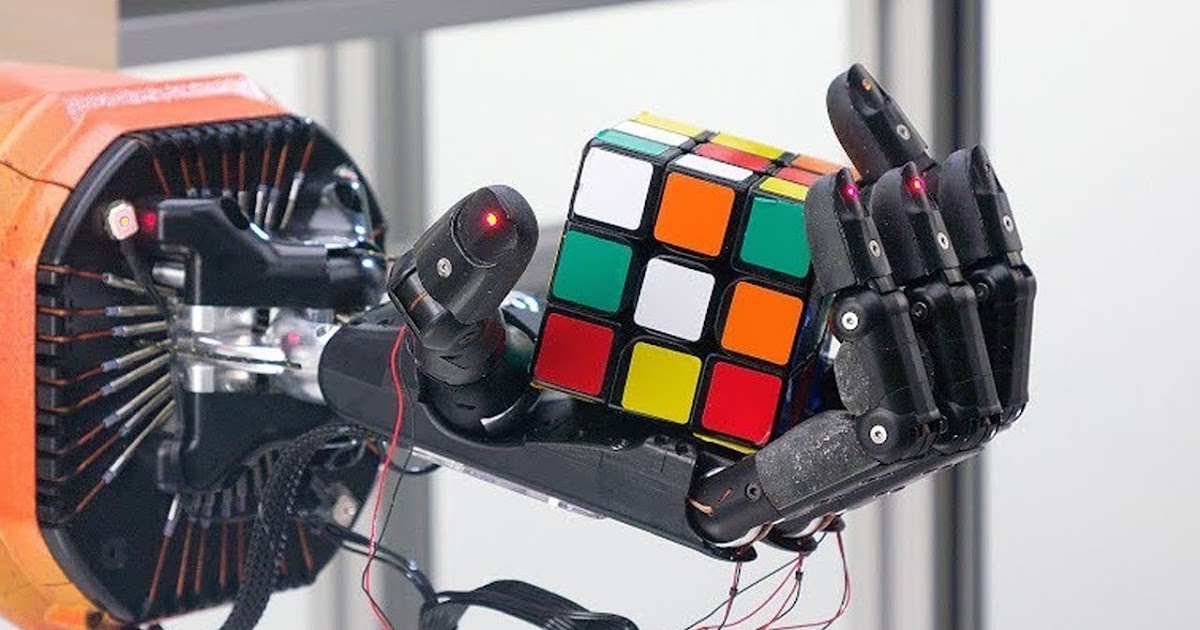 Закрепите камеру на опорах LEGO с помощью изоленты. Это хорошее время, чтобы убедиться, что камера находится в таком положении, чтобы иметь возможность захватить весь кубик Рубика. Вы можете сделать тестовый снимок с помощью команды raspistill
Закрепите камеру на опорах LEGO с помощью изоленты. Это хорошее время, чтобы убедиться, что камера находится в таком положении, чтобы иметь возможность захватить весь кубик Рубика. Вы можете сделать тестовый снимок с помощью команды raspistill
raspistill -o cam.jpg
Убедитесь, что куб правильно расположен по центру изображения.
Подготовка программного обеспечения
Вы можете использовать любую версию Raspbian или Raspbian для роботов, нашего пользовательского образа, который поставляется с уже установленным BrickPi3. Если вы используете стандартную версию Raspbian, вы можете установить библиотеки BrickPi3 с помощью команды
sudo curl -kL dexterindustries.com/update_brickpi3 | bash
На этом шаге будут установлены все библиотеки, необходимые для запуска BrickPi3 на образе Raspbian. Пропустите этот шаг, если вы используете Raspbian для роботов: BrickPi3 уже установлен.
Наконец, установите все зависимости проекта с помощью команды:
sudo curl https://raw. githubusercontent.com/DexterInd/BrickPi3/master/Projects/BricKuber/install_brickuber.sh | bash
githubusercontent.com/DexterInd/BrickPi3/master/Projects/BricKuber/install_brickuber.sh | bash
Для этого шага ваш BrickPi3 должен быть подключен к Интернету. Есть ряд библиотек, от которых зависит проект, в том числе некоторые важные библиотеки Дэниела Уолтона (@dwalton76) на Github, которые используются для сборки кубика Рубика.
Соберите кубик Рубика
Поместите несобранный кубик Рубика в подставку. Запустите команду
sudo python ~/Dexter/BrickPi3/Projects/BricKuber/BricKuber.py
Робот повернет куб каждой гранью, и камера сделает 6 снимков, по одному с каждой стороны куба. Raspberry Pi определит конфигурацию куба по шести картинкам. Конфигурация куба будет передана в библиотеку kociemba Python для поиска эффективного решения. Наконец, робот будет выполнять движения, чтобы собрать кубик Рубика!
Исходный код
Весь исходный код BricKuber можно найти в нашем репозитории github с открытым исходным кодом здесь.