Содержание
Создан робот, который собирает кубик Рубика за 1 секунду (ВИДЕО). Новости дня в мире и России сегодня
-
13:54
Экс-редактор «Первого канала» Марина Овсянникова нашла себе новую работу -
17:09
Умерла жена режиссера Валерия Тодоровского актриса Евгения Брик -
16:42
WebMoney приостанавливает все операции по кошелькам в рублях -
16:02
Фигурантe дела о взрывах в московском метро 2010 года дали пожизненный срок -
16:57
ЦБ РФ предложил запретить любые операции с криптовалютами и майнинг в России -
15:54
В СКР потребовали заочно арестовать Шляфмана по делу об убийстве Талькова -
23:28
Преподавателя ВШЭ и МГУ арестовали по делу о педофилии -
16:27
В США готовят новый пакет санкций: в списке 35 россиян, включая Мишустина -
23:04
Умер знаменитый французский актер Жан-Поль Бельмондо -
16:54
Президент Гаити Жовенель Моиз и его жена убиты после нападения -
16:36
В ЕС пообещали белоруссии 3 млрд евро при условии смены власти -
15:31
Лавров сделал замечание прервавшему его сотруднику «Би-би-си» -
13:37
ИноСМИ: в США создана секретная армию численностью около 60 тыс. человек
человек -
16:50
Россияне назвали сумму, необходимую им для счастья в месяц -
11:03
Названы симптомы, шестикратно повышающие риск смерти от COVID-19 -
10:52
Самолеты НАТО отработали массированное нанесение ударов по РФ -
14:35
Умер супруг королевы Елизаветы II принц Филипп, герцог Эдинбургский -
14:51
Телепроект «Дом-2» перезапускают на канале «Ю» -
14:47
Основатель группы «Звуки Му» Александр Липницкий погиб в Подмосковье -
16:56
СМИ: Роскомнадзор может начать запрашивать паспорт при регистрации в соцсетях -
12:21
В московском офисе «Открытой России» начались обыски -
14:40
Путин ответил Байдену, назвавшему его убийцей -
15:04
Умерла актриса Екатерина Градова, известная по роли радистки Кэт -
22:19
Умер олимпийский чемпион Юрий Власов -
14:15
«Яндекс» заявил об утечке данных 5 тысяч почтовых ящиков -
13:53
Врач рассказал, когда можно делать прививки тем, кто переболел коронавирусом -
12:30
В связи с улучшением ситуации в Москве отменили часть ограничений -
12:25
США ввели санкции против трубоукладчика «Северного потока-2» -
12:40
Названы лекарства, противопоказанные при COVID-19 -
15:00
СМИ узнали вероятную причину крушения Boeing 737 в Индонезии
 человек
человек
-
Экс-редактор «Первого канала» Марина Овсянникова нашла себе новую работу -
Умерла жена режиссера Валерия Тодоровского актриса Евгения Брик -
WebMoney приостанавливает все операции по кошелькам в рублях -
Фигурантe дела о взрывах в московском метро 2010 года дали пожизненный срок -
ЦБ РФ предложил запретить любые операции с криптовалютами и майнинг в России -
В СКР потребовали заочно арестовать Шляфмана по делу об убийстве Талькова -
Преподавателя ВШЭ и МГУ арестовали по делу о педофилии -
В США готовят новый пакет санкций: в списке 35 россиян, включая Мишустина -
Умер знаменитый французский актер Жан-Поль Бельмондо -
Президент Гаити Жовенель Моиз и его жена убиты после нападения -
В ЕС пообещали белоруссии 3 млрд евро при условии смены власти -
Лавров сделал замечание прервавшему его сотруднику «Би-би-си» -
ИноСМИ: в США создана секретная армию численностью около 60 тыс. человек -
Россияне назвали сумму, необходимую им для счастья в месяц -
Названы симптомы, шестикратно повышающие риск смерти от COVID-19 -
Самолеты НАТО отработали массированное нанесение ударов по РФ -
Умер супруг королевы Елизаветы II принц Филипп, герцог Эдинбургский -
Телепроект «Дом-2» перезапускают на канале «Ю» -
Основатель группы «Звуки Му» Александр Липницкий погиб в Подмосковье -
СМИ: Роскомнадзор может начать запрашивать паспорт при регистрации в соцсетях -
В московском офисе «Открытой России» начались обыски -
Путин ответил Байдену, назвавшему его убийцей -
Умерла актриса Екатерина Градова, известная по роли радистки Кэт -
Умер олимпийский чемпион Юрий Власов -
«Яндекс» заявил об утечке данных 5 тысяч почтовых ящиков -
Врач рассказал, когда можно делать прививки тем, кто переболел коронавирусом -
В связи с улучшением ситуации в Москве отменили часть ограничений -
США ввели санкции против трубоукладчика «Северного потока-2» -
Названы лекарства, противопоказанные при COVID-19 -
СМИ узнали вероятную причину крушения Boeing 737 в Индонезии
 человек
человек
26. 01.2016
01.2016
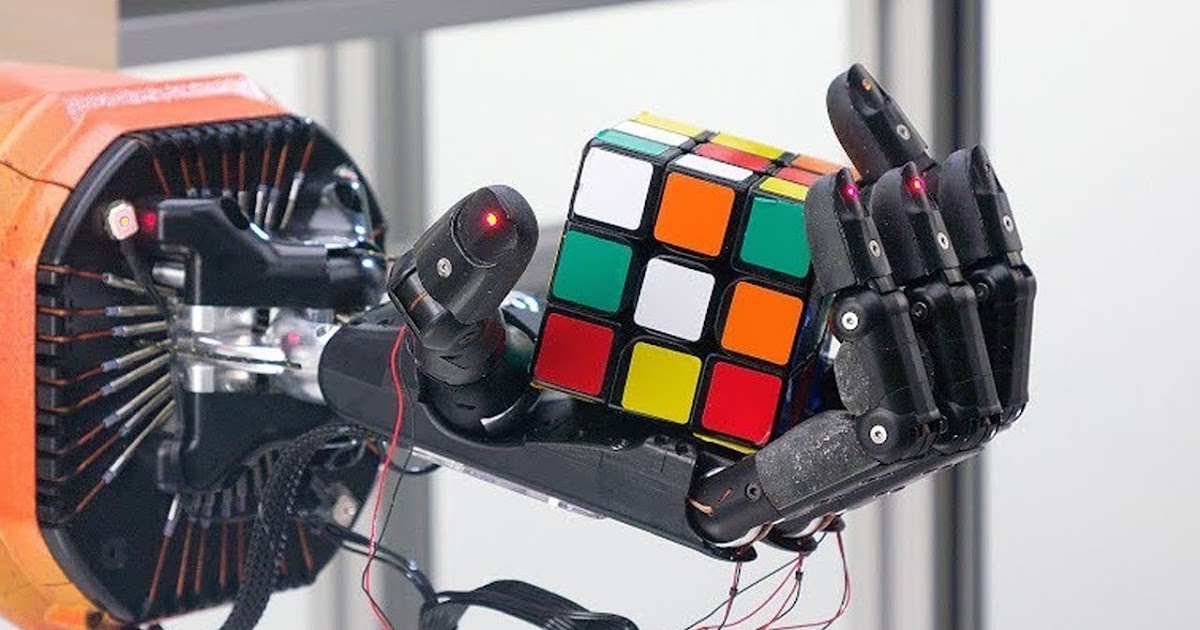
Американские изобретатели Джей Флэтлэнд и Пол Роуз создали робота, который собирает кубик Рубика за рекордное время.
Всего 1,047 секунды понадобилось творению американцев, чтобы собрать кубик Рубика.
Сообщается, что в конструкции используется шесть двигателей, подключенных к плате Arduino, а также четыре веб-камеры, распознающих исходное состояние кубика.
Отметим, что мировой рекорд принадлежит американскому школьнику, сумевшему собрать кубик Рубика за 4,9 секунды.
Читайте Новости дня и Новости России на нашем канале Яндекс Дзен и на страницах нашего сайта День ОНЛАЙН
ЕЩЕ В РАЗДЕЛЕ
-
Видео экстремального испытания пулемета Калашникова попало в Сеть
-
13:55
Сверхманевренность американского F-22 попала на видео -
10:37
Экстремальный полет Ил-38 на сверхмалой высоте попал на видео
ВСЕ ВИДЕО РАЗДЕЛА →
НОВОСТИ ДНЯ
-
10:53
Минобороны РФ рассказало о перегруппировке войск от Балаклеи и Изюма в ДНР -
16:21
Британский премьер Борис Джонсон ушел в отставку -
13:55
СМИ: под Лисичанском сдались в плен более 800 бойцов ВСУ
ВСЕ НОВОСТИ →
ФОТО ДНЯ
-
01:53
54
Женщины на Великой Отечественной Войне -
00:39
50
Топ 50 спортсменов, которые побывали в тюрьме -
00:40
60
Любовницы мировых лидеров: самые громкие скандалы -
00:28
54
Загадки мира, которые до сих пор не разгаданы -
00:11
31
Знаменитые мафиози всех времен -
00:11
30
15 фильмов, которые в последний момент спасла замена актеров -
00:13
43
Уснувшие и зевающие политики, которым покой только сниться -
00:34
50
Звезды, которые проводили эксперименты со своим весом -
00:16
53
Самые загадочные исчезновения в истории -
00:11
79
Несси, кардиффсикй великан и йети: великие мистификации 20 века -
08:11
47
Богатые звезды, которые игнорируют и скрывают бедных родственников -
00:18
34
Звездные пары, любители постить совместные фото в Instagram
ВИДЕО ДНЯ
Новый рекорд сборки кубика Рубика: 0,38 секунды / Хабр
alizar
 000Z» title=»2018-03-11, 16:45″>11 марта 2018 в 16:45
000Z» title=»2018-03-11, 16:45″>11 марта 2018 в 16:45
Робототехника DIY или Сделай сам
Робот-рекордсмен, разработанный в лаборатории биомиметической роботехники Массачусетского технологического института
Есть игры, в которые ИИ обыгрывает человека. А есть такие задачи, где человек вообще не рассматривается как конкурент. Здесь роботы соревнуются только друг с другом. Сборка кубика Рубика — типичная такая задача.
В ноябре 2016 года робот компании Infineon Technologies AG установил новый мировой рекорд по сборке кубика Рубика: собрал его за 0,637 секунды, побив предыдущий рекорд 0,89 с. Но европейских инженеров превзошли студенты лаборатории биомиметической роботехники (Biomimetic Robotics Lab) Массачусетского технологического института. Их робот справился с заданием за невероятные 0,38 секунды. Это «грязное» время, которое включает в себя нажатие клавиши «Старт», распознавание изображения и вычисление последовательности действий. Непосредственно механическая часть выполнения задачи заняла примерно 335 миллисекунд. Решение задачи в программе на базе min2phase и отправка инструкций — 45 миллисекунд.
Непосредственно механическая часть выполнения задачи заняла примерно 335 миллисекунд. Решение задачи в программе на базе min2phase и отправка инструкций — 45 миллисекунд.
Видео в реальном времени снято явно не для человеческих глаз. Чтобы несовершенные органы чувств человека смогли зафиксировать процесс сборки, а медленный человеческий мозг осознал происходящее, требуется замедлить воспроизведение видео хотя бы в несколько десятков раз. На скорости 0,03x от реальной становится что-то понятно.
Разработчики уверены, что машина вполне способна справиться быстрее, но для этого требуется тщательная оптимизация тайминга механических движений, отснятых на высокоскоростную камеру. На видео в 0,03х скорости (замедление в 33 раза) заметно, что после каждого перемещения грани кубика по инерции двигаются туда и обратно, прежде чем окончательно остановиться. Так, поворот на 90° в реальности завершается за примерно 10 миллисекунд, но робот делает следующее движение через 15 миллисекунд. Именно в этой части можно значительно оптимизировать процесс. Но робот и так почти в два раза перекрыл предыдущий мировой рекорд, а из-за ошибок оптимизации ломался кубик или взрывались полевые транзисторы. Так что решили оставить всё как есть. Но если нужно, студенты могут «срезать» с рекорда ещё 100 миллисекунд.
Именно в этой части можно значительно оптимизировать процесс. Но робот и так почти в два раза перекрыл предыдущий мировой рекорд, а из-за ошибок оптимизации ломался кубик или взрывались полевые транзисторы. Так что решили оставить всё как есть. Но если нужно, студенты могут «срезать» с рекорда ещё 100 миллисекунд.
В конструкции использованы следующие детали:
- 6 двигателей Kollmorgen ServoDisc серии U9 (четыре N9M4T с неодимовыми магнитами и два UD9-E — у них одинаковые характеристики и производительность). Два из них взяты со старого проекта механизированной руки, остальные по дешёвке куплены на eBay. К каждому двигателю прикреплён оптический датчик US Digital 2000, тоже с eBay. Хотя эти датчики обеспечивают избыточное разрешение для данного эксперимента, но их удалось купить по $14 за штуку — новые, что просто отличная цена. Правда, для прикрепления датчиков на двигатели пришлось немного повозиться.
- 6 специально разработанных драйверов двигателей с 12-вольтовым питанием. Здесь работают контроллеры STM32F303K8. Платы собраны на 100-вольтовых транзисторах. Но почему-то на 60 вольтах один из них дважды взорвался, когда кубик застревал. Прошивка для контроллеров.
Синхронизацию/согласование движений между шестью контроллерами осуществляет простая логическая плата (AND Board), которая получает сигнал от каждого двигателя о начале/окончании движения и посылает сигнал о безопасном начале работы следующему двигателю в очереди.
- 2 камеры PlayStation Eye снимают по три грани каждая. Видео обрабатывается на 187 FPS под Linux с очень низкой задержкой, по сравнению с обычными веб-камерами. Эти камеры удалось купить по 7 долларов. Правда, обнаружилась проблема с чётким различием красных и оранжевых квадратов, так что студенты немного смошенничали — и закрасили оранжевые квадраты чёрной краской.
- 1 кубик Рубика. Один из самых дешёвых.
 Здесь работают контроллеры STM32F303K8. Платы собраны на 100-вольтовых транзисторах. Но почему-то на 60 вольтах один из них дважды взорвался, когда кубик застревал. Прошивка для контроллеров.
Здесь работают контроллеры STM32F303K8. Платы собраны на 100-вольтовых транзисторах. Но почему-то на 60 вольтах один из них дважды взорвался, когда кубик застревал. Прошивка для контроллеров.
Кубики не зря брали дешёвые, потому что в ходе эксперимента несколько штук сломались (см. видео). Инженеры пишут, что одна из хитростей, чтобы всё хорошо работало — обеспечить по-настоящему плотное сжатие всех деталей кубика. Если детали отходят друг от друга, то внешние части могут вывернуться наружу, когда вы пытаетесь быстро повернуть центральные плоскости.
видео). Инженеры пишут, что одна из хитростей, чтобы всё хорошо работало — обеспечить по-настоящему плотное сжатие всех деталей кубика. Если детали отходят друг от друга, то внешние части могут вывернуться наружу, когда вы пытаетесь быстро повернуть центральные плоскости.
Для сборки хорошо «разобранного» кубика обычно требуется от 19 до 23 шагов. Некоторые решения складываются быстрее, чем другие (самое быстрое состоит из 21 шага). Так что если повезёт, то задача решится примерно на 30 миллисекунд быстрее.
Теги:
- кубик Рубика
- робот
- Kollmorgen ServoDisc
- PlayStation Eye
Хабы:
- Робототехника
- DIY или Сделай сам
Всего голосов 31: ↑31 и ↓0 +31
Просмотры
40K
Комментарии
44
Анатолий Ализар
@alizar
автор, фрилансер
Telegram
Комментарии
Комментарии 44
Этот робот может собрать кубик Рубика за 1 секунду
Эта статья была опубликована 25 января 2016 года
Рассказ
Абхиманью Гошал
История
Абхиманью Гошал
Управляющий редактор
Абхиманью является управляющим редактором TNW и занимается персональными устройствами, технологической экосистемой Азии, а также пересечением технологий и технологий.
(показать все)
Абхиманью — управляющий редактор TNW, посвященный персональным устройствам, технологической экосистеме Азии, а также пересечению технологий и культуры. Напишите ему в Твиттере или напишите: [email protected].
Мало того, что 14-летний подросток установил мировой рекорд по сборке кубика Рубика менее чем за пять секунд в ноябре прошлого года, пара инженеров-программистов создала робота, который может сломать его всего за одну секунду. .
Состоящий из нескольких шаговых двигателей, напечатанных на 3D-принтере деталей, веб-камер и микросхемы Arduino, подключенных к системе Linux, робот Джея Флатланда и Пола Роуза может последовательно решать головоломки кубика Рубика менее чем за 1,2 секунды.
Дуэт использует алгоритм Коциембы, чтобы решить головоломку, и просверлил отверстия в середине каждой из шести сторон куба, чтобы робот мог манипулировать им.
Присоединяйтесь к TNW в Валенсии!
Сердце технологий приближается к сердцу Средиземноморья
Подробнее
Для проверки машины ее камеры закрыты, чтобы они не могли видеть куб, пока он не будет должным образом зашифрован.
Текущий рекорд машины составляет 3,253 секунды, а это значит, что Флатландия и Роуз могут вскоре побить его. В настоящее время они находятся в процессе подачи заявки на мировой рекорд.
OpenAI’s AI-powered robot learned how to solve a Rubik’s cube one-handed
- Tech/
- Artificial Intelligence/
- Robot
/
Dactyl gets more dexterous
By Nick Statt / @nickstatt
 000Z»> 15 октября 2019 г., 16:00 UTC |
000Z»> 15 октября 2019 г., 16:00 UTC |
Поделитесь этой историей
Фото: OpenAI
Исследовательская организация OpenAI, занимающаяся исследованиями в области искусственного интеллекта, достигла новой вехи в своем стремлении создать самообучающихся роботов общего назначения. Подразделение робототехники группы говорит, что Dactyl, его гуманоидная роботизированная рука, впервые разработанная в прошлом году, научилась собирать кубик Рубика одной рукой. OpenAI рассматривает этот подвиг как скачок вперед как для ловкости роботизированных придатков, так и для собственного программного обеспечения искусственного интеллекта, которое позволяет Dactyl изучать новые задачи с помощью виртуальных симуляций, прежде чем ему предстоит преодолеть реальную физическую проблему.
В демонстрационном видео, демонстрирующем новый талант Дактиля, мы видим, как роботизированная рука нащупывает путь к полному сбору куба неуклюжими, но точными маневрами. Это занимает много минут, но Дактил в конце концов решает головоломку. Наблюдать за этим в действии несколько тревожно, хотя бы потому, что движения выглядят заметно менее плавными, чем человеческие, и особенно бессвязными по сравнению с ослепляющей скоростью и грубой ловкостью, демонстрируемой, когда спидкубер-человек решает куб за считанные секунды.
Это занимает много минут, но Дактил в конце концов решает головоломку. Наблюдать за этим в действии несколько тревожно, хотя бы потому, что движения выглядят заметно менее плавными, чем человеческие, и особенно бессвязными по сравнению с ослепляющей скоростью и грубой ловкостью, демонстрируемой, когда спидкубер-человек решает куб за считанные секунды.
Но для OpenAI достижение Dactyl приближает его на один шаг к столь желанной цели для более широкой индустрии искусственного интеллекта и робототехники: робот, который может научиться выполнять множество реальных задач без необходимости месяцами тренироваться, чтобы лет реального времени и без необходимости специального программирования.
Изображение: OpenAI
«Многие роботы могут очень быстро собирать кубики Рубика. Важное различие между тем, что они делали там, и тем, что делаем мы здесь, заключается в том, что эти роботы созданы специально для этой цели», — говорит Питер Велиндер, ученый-исследователь и руководитель отдела робототехники в OpenAI. «Очевидно, что вы не можете использовать того же робота или тот же подход для выполнения другой задачи. У команды робототехники OpenAI совсем другие амбиции. Мы пытаемся построить робота общего назначения. Подобно тому, как люди и наши человеческие руки могут делать множество вещей, а не только конкретную задачу, мы пытаемся создать что-то гораздо более общее по своим масштабам».
«Очевидно, что вы не можете использовать того же робота или тот же подход для выполнения другой задачи. У команды робототехники OpenAI совсем другие амбиции. Мы пытаемся построить робота общего назначения. Подобно тому, как люди и наши человеческие руки могут делать множество вещей, а не только конкретную задачу, мы пытаемся создать что-то гораздо более общее по своим масштабам».
Велиндер ссылается на серию роботов, появившихся за последние несколько лет, которые позволили собирать кубик Рубика далеко за пределы возможностей человеческих рук и разума. В 2016 году производитель полупроводников Infineon разработал робота специально для сборки кубика Рубика со сверхчеловеческой скоростью, и роботу удалось сделать это менее чем за одну секунду. Это побило тогдашний мировой рекорд менее чем за пять секунд. Два года спустя машина, разработанная Массачусетским технологическим институтом, решила куб менее чем за 0,4 секунды. В конце 2018 года японский канал на YouTube под названием Human Controller даже разработал собственный самособирающийся кубик Рубика с использованием напечатанного на 3D-принтере ядра, прикрепленного к программируемым серводвигателям.
Машины годами собирали кубик Рубика со сверхчеловеческой скоростью
Другими словами, робот, созданный для одной конкретной задачи и запрограммированный на максимально эффективное выполнение этой задачи, как правило, лучше человека, а сборка кубика Рубика что-то программное обеспечение давно освоил. Таким образом, разработка робота для решения куба, даже гуманоидного, не так уж примечательна сама по себе, и тем более с медленной скоростью, с которой работает Dactyl.
Но робот OpenAI Dactyl и программное обеспечение, на котором он работает, сильно отличаются по конструкции и назначению от специальной машины для решения кубов. Как говорит Велиндер, текущая робототехническая работа OpenAI не направлена на достижение превосходных результатов в узких задачах, поскольку для этого требуется только разработать лучшего робота и соответствующим образом запрограммировать его. Это можно сделать без современного искусственного интеллекта.
Вместо этого Dactyl разработан с нуля как самообучающаяся роботизированная рука, которая подходит к новым задачам так же, как человек. Он обучается с помощью программного обеспечения, которое в настоящее время в зачаточном состоянии пытается воспроизвести миллионы лет эволюции, которые помогают нам научиться инстинктивно пользоваться руками в детстве. OpenAI надеется, что однажды это может помочь человечеству разработать виды гуманоидных роботов, о которых мы знаем только из научной фантастики, роботов, которые могут безопасно работать в обществе, не подвергая нас опасности, и выполнять широкий спектр задач в таких хаотичных средах, как городские улицы и фабричные цеха. .
Он обучается с помощью программного обеспечения, которое в настоящее время в зачаточном состоянии пытается воспроизвести миллионы лет эволюции, которые помогают нам научиться инстинктивно пользоваться руками в детстве. OpenAI надеется, что однажды это может помочь человечеству разработать виды гуманоидных роботов, о которых мы знаем только из научной фантастики, роботов, которые могут безопасно работать в обществе, не подвергая нас опасности, и выполнять широкий спектр задач в таких хаотичных средах, как городские улицы и фабричные цеха. .
Чтобы научиться собирать кубик Рубика одной рукой, OpenAI не запрограммировал Dactyl явно для сборки игрушки; бесплатное программное обеспечение в Интернете может сделать это за вас. Он также решил не программировать отдельные движения руки, поскольку хотел, чтобы она сама различала эти движения. Вместо этого команда робототехники поставила перед базовым программным обеспечением руки конечную цель — собрать перемешанный куб и использовала современный ИИ — в частности, разновидность глубокого обучения, основанного на стимулах, называемого обучением с подкреплением, — чтобы помочь ему на пути к самостоятельному решению. Такой же подход к обучению агентов ИИ лежит в основе того, как OpenAI разработала свой первоклассный Дота 2 бот.
Такой же подход к обучению агентов ИИ лежит в основе того, как OpenAI разработала свой первоклассный Дота 2 бот.
Но до недавнего времени было гораздо проще обучить агента ИИ делать что-то виртуально — например, играть в компьютерную игру, — чем научить его выполнять задачу в реальном мире. Это связано с тем, что обучение программного обеспечения выполнению чего-либо в виртуальном мире может быть ускорено, так что ИИ может потратить на обучение десятки тысяч лет всего за месяцы реального времени, благодаря тысячам высокопроизводительных процессоров и сверхвысоких технологий. -мощные графические процессоры, работающие параллельно.
Невозможно выполнить тот же уровень подготовки, выполняя физическую задачу с физическим роботом. Вот почему OpenAI пытается внедрить новые методы обучения роботов, используя смоделированные среды вместо реального мира, с чем индустрия робототехники едва экспериментировала. Таким образом, программное обеспечение может интенсивно практиковаться в ускоренном темпе на множестве разных компьютеров одновременно, надеясь, что оно сохранит эти знания, когда начнет управлять настоящим роботом.
Роботизированная рука OpenAI Dactyl управляется программным обеспечением ИИ
Из-за ограничений на обучение и очевидных соображений безопасности используемые сегодня в коммерческих целях роботы не используют ИИ, а вместо этого запрограммированы с очень конкретными инструкциями. «Раньше к этому подходили так: вы используете очень специализированные алгоритмы для решения задач, когда у вас есть точная модель как робота, так и среды, в которой вы работаете», — говорит Велиндер. «Для заводского робота у вас есть очень точные модели, и вы точно знаете среду, в которой работаете. Вы точно знаете, как он будет подбирать конкретную часть ».
Вот почему современные роботы гораздо менее универсальны, чем люди. Требуется много времени, усилий и денег, чтобы перепрограммировать робота, который собирает, скажем, одну конкретную часть автомобиля или компонент компьютера, на что-то другое. Представьте робота, который не был должным образом обучен даже простой задаче, требующей любого уровня человеческой ловкости или визуальной обработки, и он с треском провалится. Однако с помощью современных методов искусственного интеллекта роботы могут быть смоделированы как люди, чтобы они могли использовать то же интуитивное понимание мира, чтобы делать все, от открытия дверей до жарки яиц. По крайней мере, это мечта.
Однако с помощью современных методов искусственного интеллекта роботы могут быть смоделированы как люди, чтобы они могли использовать то же интуитивное понимание мира, чтобы делать все, от открытия дверей до жарки яиц. По крайней мере, это мечта.
Нам еще предстоит пройти несколько десятков лет до такого уровня сложности, и скачки, сделанные сообществом ИИ в области программного обеспечения, такие как самоуправляемые автомобили, машинный перевод и распознавание изображений, не нашли точного воплощения в роботах следующего поколения. Прямо сейчас OpenAI просто пытается имитировать сложность одной части человеческого тела и заставить этот роботизированный аналог работать более естественно.
Вот почему Dactyl представляет собой роботизированную руку с 24 суставами, смоделированную по образцу человеческой руки, а не роботизированные захваты в виде когтей или клещей, которые вы видите на фабриках. И для того, чтобы программное обеспечение, на котором Dactyl научился использовать все эти суставы так, как это сделал бы человек, OpenAI провел тысячи лет обучения в симуляции, прежде чем пытаться решить физический куб.
Изображение: OpenAI
«Если вы тренируете что-то на реальном роботе, очевидно, что все, что вы изучаете, работает над тем, на чем вы действительно хотите развернуть свой алгоритм. Таким образом, это намного проще. Но алгоритмам сегодня нужно много данных. Чтобы обучить реального робота делать что-то сложное, нужен многолетний опыт», — говорит Велиндер. «Даже для человека требуется пара лет, а у людей есть миллионы лет эволюции, чтобы научиться управлять рукой».
Однако Велиндер говорит, что в симуляции обучение можно ускорить, точно так же, как в играх и других задачах, популярных в качестве тестов ИИ. «На обучение алгоритма уходит порядка тысячи лет. Но это займет всего несколько дней, потому что мы можем распараллелить обучение. Вам также не нужно беспокоиться о том, что роботы сломают или навредят кому-то, пока вы обучаете эти алгоритмы», — добавляет он. Тем не менее, исследователи в прошлом сталкивались со значительными проблемами, пытаясь заставить виртуальное обучение работать с физическими роботами. OpenAI заявляет, что является одной из первых организаций, которые действительно добились прогресса в этом отношении.
OpenAI заявляет, что является одной из первых организаций, которые действительно добились прогресса в этом отношении.
Когда ему дали настоящий куб, Дактиль применил свою подготовку и решил его самостоятельно, и он сделал это в различных условиях, для которых он никогда не был специально обучен. Это включает в себя сборку куба одной рукой в перчатке, с двумя пальцами, связанными вместе, и в то время как члены OpenAI постоянно вмешивались в него, тыкая в него другими объектами и осыпая его пузырьками и кусочками бумаги, похожей на конфетти.
OpenAI обучал Dactyl в течение тысяч лет с помощью моделирования, прежде чем проверить его навыки в реальном мире
«Мы обнаружили, что при всех этих возмущениях робот по-прежнему мог успешно складывать кубик Рубика. Но на тренировках этого не произошло», — говорит Матиас Плапперт, коллега Велиндера, руководитель группы роботов OpenAI. «Надежность, которую мы обнаружили, когда попробовали это на физическом роботе, была для нас неожиданной».
Вот почему OpenAI считает недавно приобретенный навык Дактил одинаково важным как для совершенствования роботизированного оборудования, так и для обучения ИИ. Даже самые продвинутые роботы в мире, такие как человекоподобные и собачьи боты, разработанные лидером отрасли Boston Dynamics, не могут работать автономно, и им требуется обширное программирование для конкретных задач и частое вмешательство человека для выполнения даже основных действий.
OpenAI говорит, что Dactyl — это небольшой, но жизненно важный шаг к созданию роботов, которые однажды смогут выполнять ручную работу или выполнять домашние задачи и даже работать вместе с людьми, а не в замкнутых средах, без какого-либо явного программирования, регулирующего их действия.
В этом видении будущего способность роботов изучать новые задачи и адаптироваться к изменяющимся условиям будет зависеть как от гибкости ИИ, так и от надежности физической машины. «Эти методы действительно начинают демонстрировать, что это решения для решения всех внутренних сложностей и беспорядка физического мира, в котором мы живем», — говорит Плапперт.