Содержание
Роботизированная рука | Rozum Robotics
PULSE — это 6-осевой коллаборативный робот-манипулятор. Подходит для автоматизации любых повторяющихся операций. Применяется на производствах, в сфере услуг и развлечений, в лабораториях и университетах.
Описание
PULSE — это линейка роботов-манипуляторов для автоматизации производственных процессов, а также для использования в исследовательских, образовательных проектах и в сфере развлечений.
Роботы-манипуляторы идеальны для автоматизации повторяющихся задач с незначительными изменениями параметров процесса, таких как: упаковка и складирование, загрузка/разгрузка станков с ЧПУ, нанесение герметика, работа на конвейере, приготовление кофе и коктейлей и пр.
PULSE имеет модульную конструкцию и шесть степеней свободы. На практике это означает, что с помощью PULSE вы можете автоматизировать 95% всех производственных задач. Робот построен на базе серводвигателей нашего собственного производства.
Мы оснащаем робота универсальный фланцем международного стандарта ISO 9409-1-50-4-M6. Это значит, что для перепрофилирования робота вам достаточно установить на PULSE любой другой захватный механизм: для работы со сварочным оборудованием, лазерными инструментами, видеокамерами, кофейным оборудованием и т.д.
Это значит, что для перепрофилирования робота вам достаточно установить на PULSE любой другой захватный механизм: для работы со сварочным оборудованием, лазерными инструментами, видеокамерами, кофейным оборудованием и т.д.
Роботизированная рука манипулятор PULSE безопасна, не требуют установки дорогостоящего защитного ограждения и может работать в прямом контакте с человеком.
Роботов PULSE можно программировать в режиме ручного обучения. Это делает установку, настройку и отладку робота быстрой и простой даже для пользователя, не имеющего опыта программирования. А для максимального контроля продвинутые пользователи могут использовать возможности API (Java, Python).
Комплект поставки
- 1x Робот манипулятор PULSE
- 1x Блок управления
- 1x Комплект соединительных кабелей
- 1x Монтажные элементы
- 1x Сертификат EC/TC
ROI-калькулятор
Модели коллаборативного робота PULSE
| Модель | PULSE 75 | PULSE 90 |
|---|---|---|
| Максимальная полезная нагрузка | 6 кг | 4 кг |
| Рабочий радиус | 750 мм | 900 мм |
| Количество степеней свободы | 6 | 6 |
| Повторяемость | +/- 0,1 мм | +/- 0,1 мм |
| Условия эксплуатации | 0. ..35 °C ..35 °C | 0…35 °C |
| Вес робота | 12.6 кг | 13.6 кг |
| Время ускорения | 2 м/с | 2 м/с |
| Фланец захватного устройства | ISO 9409-1-50-4-M6 | ISO 9409-1-50-4-M6 |
| Основание | 120 мм | 120 мм |
| Интерфейсы | Веб-интерфейс. Любое устройство | Веб-интерфейс. Любое устройство |
| Программирование | Ручное управление. REST API. UI | Ручное управление. REST API. UI |
| Гарантия | 1 год | 1 год |
| Цена для дистрибьютора: | По запросу | По запросу |
| ROI и период окупаемости | Посчитать | Посчитать |
Применение
Pick & Place
Станки с ЧПУ
Покраска
Сварка
Склейка
Контроль качества
Полировка
Pick and Place
Рутинная работа, связанная с загрузкой, выгрузкой, перемещением объектов, — это подходящая работа для коллаборативного робота. PULSE легко справится с такого рода задачами, демонстрируя при этом неизменную точность и производительность 24/7.
PULSE легко справится с такого рода задачами, демонстрируя при этом неизменную точность и производительность 24/7.
Роботы-манипуляторы PULSE с первой минуты работы повысят производительность и решат проблемы качества на вашем производстве. Компактный дизайн позволяет интегрировать коботов в уже существующие схемы производства с минимальными изменениями.
Благодаря стандартам коллаборативности PULSE разрешено использовать для непосредственной работы рядом и вместе с людьми.
Станки с ЧПУ
Используйте PULSE для обслуживания станков с ЧПУ. Это поможет оптимизировать рабочие циклы, сократит время простоя дорогостоящего оборудования и повысит общую производительность. А в то время как коботы обслуживают станки, ваш персонал сможет управлять другими, технически более сложными процессами. Это даст значительную выгоду, особенно в рамках мелкосерийного производства.
Благодаря интуитивно понятному интерфейсу и функции ручного управления операторы, обладающие даже базовыми навыками работы на компьютере, в течение 30 минут смогут перепрограммировать робот-манипулятор PULSE для выполнения других операций. PULSE можно легко перемещать от станка к станку, поскольку кобот отличается легким весом и прост в установке.
PULSE можно легко перемещать от станка к станку, поскольку кобот отличается легким весом и прост в установке.
Покраска
Использование робота PULSE для покраски или распыления улучшает качество покрытия, повышает скорость работы и производительность. Коботы максимально точны при нанесении краски и других материалов, изъяны и расход краски сводятся к минимуму. Экономия материалов составляет 20-30%.
Покрасочные работы небезопасны для здоровья человека, но вы можете снизить связанные с этим риски и расходы с помощью робота-манипулятора. Линейка роботов PULSE имеет 6 степеней свободы и большой радиус действия, который обеспечивает полное покрытие и отличный результат.
Литье под давлением
На участках литья под давлением PULSE помогает в загрузке и разгрузке машин. Кроме того, робота можно задействовать на вторичных операциях, таких как обрезка отливок.
Манипулятор PULSE — это надежный оператор литьевых машин. Благодаря компактному и и универсальному дизайну, наши коботы могут быть адаптированы к самым разнообразным условиям и задачам производства.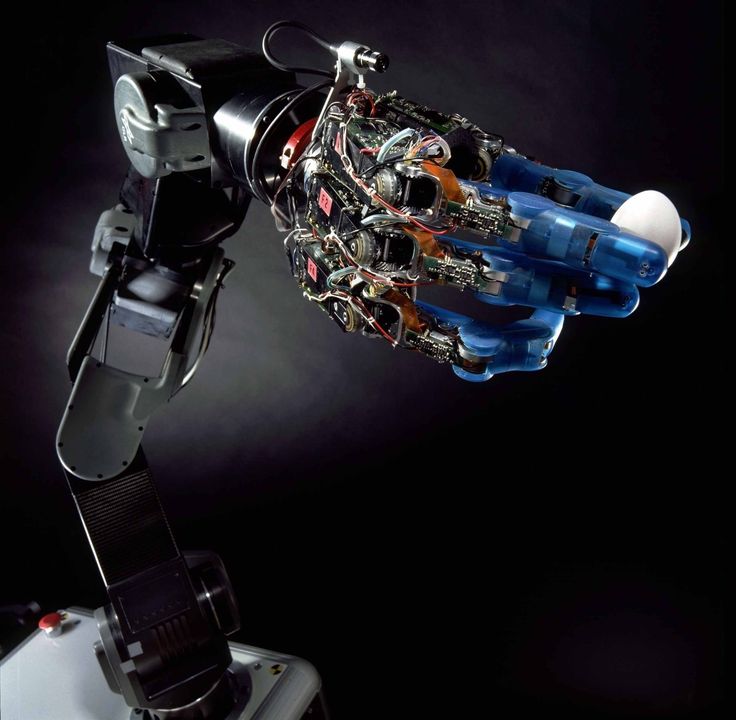 Перемещение и перенастройка манипулятора для выполнения другой операции займет у вас всего несколько часов.
Перемещение и перенастройка манипулятора для выполнения другой операции займет у вас всего несколько часов.
Лабораторное тестирование
Ключевые преимущества PULSE для лабораторных тестов — это высокая повторяемость и точность движения робота. PULSE воспроизводит заданную траекторию с максимально возможным отклонением в 0,1 мм. Робот обеспечивает надежность и гарантирует объективный результат ваших тестов.
Для программирования роботов-манипуляторов PULSE можно использовать упрощенный интерфейс, понятный даже для специалистов без знания и опыта в программировании. Также доступен расширенный API-функционал для профессионального программирования более сложных задач.
Вы полностью контролируете то, что делает ваш робот. Если ваши тесты связаны с контактом с вредными и опасными для здоровья веществами, вы можете передать эту задачу коботу PULSE. Все риски он возьмет на свои металлические плечи.
Сварочные работы
Сварка требует от особой осторожности и внимательности. Ошибки в этой работе стоят не столько денег, сколько здоровья и даже жизни людей. Роботы-манипуляторы PULSE не теряют концентрации от задачи к задаче 24/7, что позволяет минимизировать риски, дефекты и брак изделий.
Ошибки в этой работе стоят не столько денег, сколько здоровья и даже жизни людей. Роботы-манипуляторы PULSE не теряют концентрации от задачи к задаче 24/7, что позволяет минимизировать риски, дефекты и брак изделий.
Точечная, дуговая или ультразвуковая сварка — вы можете выполнять с помощью робота PULSE любые сварные швы. Ваши операторы при этом смогут выполнять менее опасную, но при этом крайне важную работу — контроль качества изделий или переналадку робота. Гибкость в установке и высокая повторяемость движений наших коботов гарантируют минимальное время простоя, неизменно высокое качество изделий и снижение затрат.
Склеивание
Равномерное нанесение клея и применение одинаковой силы имеют решающее значение для конечного результата. Благодаря высокой точности и повторяемости, робот-манипулятор PULSE равномерно наносит клей на поверхность и эффективно использует расходные материалы. Это позволяет снизить затраты и повысить качество продукции с первого дня использования кобота PULSE.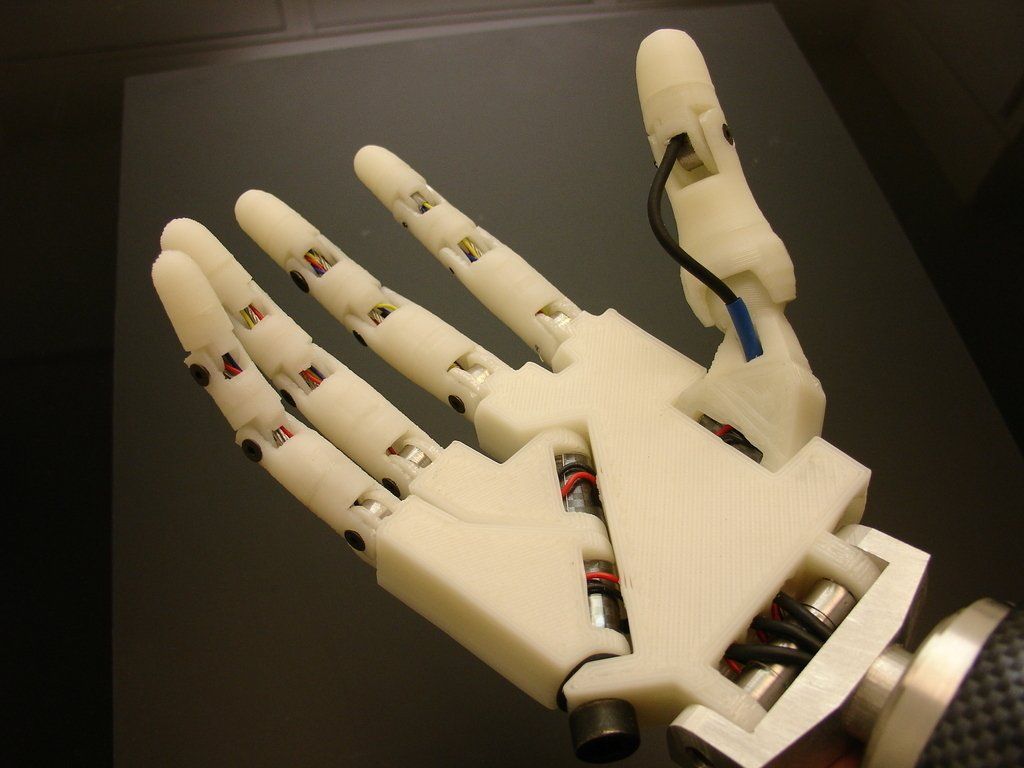
Работа по склейке сопряжена со значительными рисками для здоровья. Коботов можно и нужно задействовать на опасных производствах в работе с вредными веществами.
Контроль качества
В процессах, где качество и надежность готовых продуктов имеют решающее значение, человеческая ошибка или невнимательность может стоить вашему бизнесу огромных потерь. Речь идет не только о деньгах, но и о деловой репутации, восстановить которую гораздо сложнее. Использование коллаборативных роботов на ключевых этапах проверки изделий — это решение, которое гарантирует вам качественный и постоянный контроль продукции.
PULSE можно интегрировать в ваш процесс тестирования в кратчайшие сроки с минимальными затратами и усилиями. Для работы с роботами не требуется нанимать специально обученный персонал. С управлением и переустановкой PULSE справится ваш обычный инспектор или оператор. Роботы-манипуляторы PULSE скрупулезно выполняют свою работу — они не отвлекаются и бдительно следят за качеством продукции 24/7.
Полировка
Полировка — это тяжелый труд, который требует постоянных физических усилий. Кроме того, выполнение этой операции в течение долгого времени влечет за собой риск получения травм и развития хронических болезней.
Коллаборативный робот PULSE выполняет такие задачи с постоянной воспроизводимостью и высокой точностью. Робот с улучшенными функциями измерения силы значительно повышает качество и производительность при выполнении отделочных работ.
Особенности
Решения
RozumLab
Учебная ячейка с роботом
RozumLab – это готовое решение по практическому обучению робототехнике. RozumLab представляет собой мобильную ячейку с установленным на ней роботом PULSE, конвейерной лентой и системой захватов. Оборудование и готовая программа лабораторных работ RozumLab охватывают 90% реальных производственных задач на базе роботов. Изучайте робототехнику эффективно и на практике!
Узнать больше
Робот-оператор ЧПУ
Автоматическая загрузка и разгрузка станков с ЧПУ
Автоматизируйте загрузку и разгрузку ваших станков с помощью робота PULSE. Робот-оператор увеличивает производительность, минимизирует количество брака готовых изделий, а также исключает опасность производственных травм, связанных с загрузкой горячих, острых или тяжелых деталей.
Робот-оператор увеличивает производительность, минимизирует количество брака готовых изделий, а также исключает опасность производственных травм, связанных с загрузкой горячих, острых или тяжелых деталей.
Узнать больше
Сферы применения
Автомобильная промышленность
Бытовая электроника
Пищевая промышленность
Машиностроение
Медицина
Военная, оборонная и аэрокосмическая промышленность
Упаковочная промышленность
Производство ПВХ
Университеты
Вам нужен PULSE?
1
Отправьте заявку
Оставьте онлайн-запрос, отправьте e-mail или позвоните нам. Мы изучим ваш запрос, проработаем модель интеграции робота в ваш бизнес и предоставим подробные условия и сроки поставки.
2
Оплатите заказ
Мы выставляем счет на основе согласованных условий, и вы оплачиваете его — вот и все, что требуется. При необходимости наши менеджеры помогут вам на каждом этапе выбора модели робота.

3
Ожидайте доставку
Время доставки PULSE с момента оплаты составляет до шести недель. Мы доставим робота прямо к вашей двери! Где бы она ни находилась.
4
Робот ваш!
На всю продукцию предоставляется 1 год гарантии. Каждый наш клиент по запросу получает персонализированную техническую поддержку в режиме реального времени.

Документация
- PULSE 75
Спецификация
.pdf
Краткая инструкция по началу работы с PULSE
.pdf
Руководство пользователя
.pdf
3D Модель
.step
Руководство по применению REST API
.pdf
Размерный чертеж
.pdf
Исходный код Rest API Python
link
- PULSE 90
Спецификация
.pdf
Краткая инструкция по началу работы с PULSE
.pdf
Руководство пользователя
.pdf
Руководство по применению REST API
.pdf
Исходный код Rest API Python
link
3D Модель
.
step
 step
stepСоздана роботизированная рука, которая может быть ловкой и сильной одновременно / Хабр
Существовавшие раньше роботизированные руки могли либо осторожно захватить яйцо, либо поднять тяжёлый баскетбольный мяч. Одно из двух. Никогда – и то, и другое. В этом всегда было их важное отличие от человеческих рук, способных быть ловкими и сильными одновременно.
Инженеры из Национального университета Сингапура (NUS) решили исправить ситуацию и построили роботизированную систему, которая может захватывать разные предметы, от мягких и хрупких до громоздких и тяжелых. Предполагается, что новинка будет востребована в сельском хозяйстве, при сборке пищевых продуктов и упаковке товаров.
По данным NUS, эти отрасли стараются максимально автоматизировать свои процессы, но некоторые из них всё ещё требуют ловкости человеческих рук. Каждый раз, собираясь взять какой-либо предмет, мы оцениваем его форму, текстуру, вес и размер. Это позволяет решить, как лучше захватить его, чтобы, к примеру, не повредить. Поэтому робо-руки не всегда могут полноценно заменить человека.
Поэтому робо-руки не всегда могут полноценно заменить человека.
Решением могут стать роботизированные захваты с 3-4 мягкими и гибкими пальцами, расположенными на реконфигурируемом основании. Пальцы имеют пневматический привод и оснащены блокирующим механизмом, который позволяет регулировать степень нажатия. Также они покрыты клейким материалом, напоминающим пальцы геккона.
Клей геккона создает прочную фиксацию с помощью микроскопических лоскутов. При полном контакте с поверхностью эти створки создают силу Ван-дер-Ваальса: слабую межмолекулярную силу, которая возникает из-за тонких различий в положениях электронов на внешней стороне молекул. В результате клеи могут сильно сжиматься, но для этого требуется небольшое усилие. Еще один бонус: они не липнут на ощупь и не оставляют следов.
Клей, созданный под вдохновением от гекконов, должен определенным образом соединяться с поверхностью, чтобы активировать силу Ван-дер-Ваальса. Это легко контролировать, когда покрытие плавно наносится на плоскую поверхность, но гораздо сложнее, если поверхность должна контактировать с объектом под разными углами, как в случае с пальцами роботизированной руки.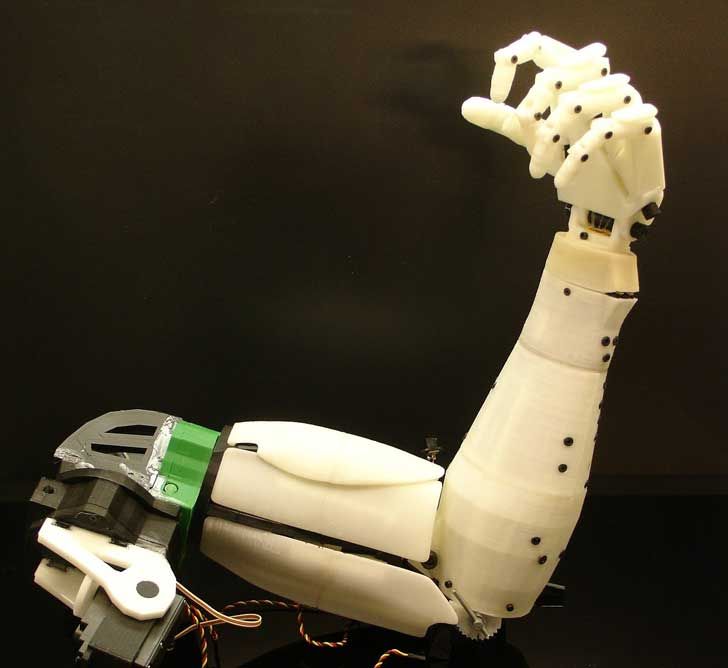
Для решения этой проблемы пальцы получили форму складной ребристой конструкции. Независимо от местоположения или угла контакта, рёбра постоянно изгибаются, чтобы обеспечить равномерные усилия на липких подушках и предотвратить преждевременное соскальзывание любой из них.
Также важны и сухожилия робо-руки, потому что они обеспечивают правильный захват. В то время как обычные роботизированные руки берут объекты кончиками пальцев, складывая их в форме буквы «C». Новая система сжимает пальцы так, чтобы предмет полностью прилегал к подушечке. Таким образом клей контактирует с большей поверхностью объекта.
Роботизированная система использует компьютерное зрение и технологии глубокого обучения, поэтому она может определять тип объектов и их ориентацию в пространстве. Затем система автоматически решает, как лучше всего захватывать и размещать объекты, чтобы минимизировать вмешательство человека.
Система конфигурируется «под запрос» и может быть оснащена тремя различными вариантами захватов для различных целей:
1. GourmetGrip. Подходит для гранулированных объектов, например, мелких пищевых продуктов, хрупких, ломких предметов. Данный вариант также называют «режим мягких рук», он поддерживает различные режимы захвата и может работать в ограниченном пространстве.
GourmetGrip. Подходит для гранулированных объектов, например, мелких пищевых продуктов, хрупких, ломких предметов. Данный вариант также называют «режим мягких рук», он поддерживает различные режимы захвата и может работать в ограниченном пространстве.
GourmetGrip, установленный на промышленный робот-манипулятор, способен собирать и размещать продукты питания с той же скоростью, что и человек, но может делать это круглосуточно. По сравнению с другими промышленными захватами он является более точным, а его скорость выше на 23%. GourmetGrip захватывает 50 видов продуктов, включая пудинг, нарезанные торты и фрукты.
2. Universal Soft Gripper (UnisoGrip). Подходит для захвата товаров со сборочных линий, когда они находятся на заключительной стадии упаковки. Это наиболее гибкий вариант, который может подстраиваться под различные нужды. Данная система по размеру больше, чем GourmetGrip, и позволяет работать с предметами шириной до 30 см и весом до 3 кг.
UnisoGrip также имеет вращающиеся мягкие пальцы, которые подходят для ломких продуктов, а также вакуумную присоску, которая позволяет системе работать в труднодоступных местах, например, в углу большой корзины. На сегодняшний день система может захватывать более 30 видов потребительских товаров, включая пакеты с молотым кофе, многоразовые пакеты для моющих средств и напитки в бутылках.
Заказчики также могут создать систему захвата на основе GourmetGrip и UnisoGrip, полностью адаптированную под свои бизнес-процессы. Например, система была адаптирована для сингапурского производителя People Bee Hoon Factory, который выпускает рисовую лапшу. Робо-манипулятор оптимизирован для упаковки пакетов с рисовой лапшой в картонные коробки.
В настоящее время инженеры NUS работают над расширением спектра объектов, которые способна распознавать система.
Роботизированная рука — HiSoUR История культуры
Роботизированная рука — это тип механического рычага, обычно программируемого, с аналогичными функциями с человеческой рукой; рука может быть суммой всего механизма или может быть частью более сложного робота.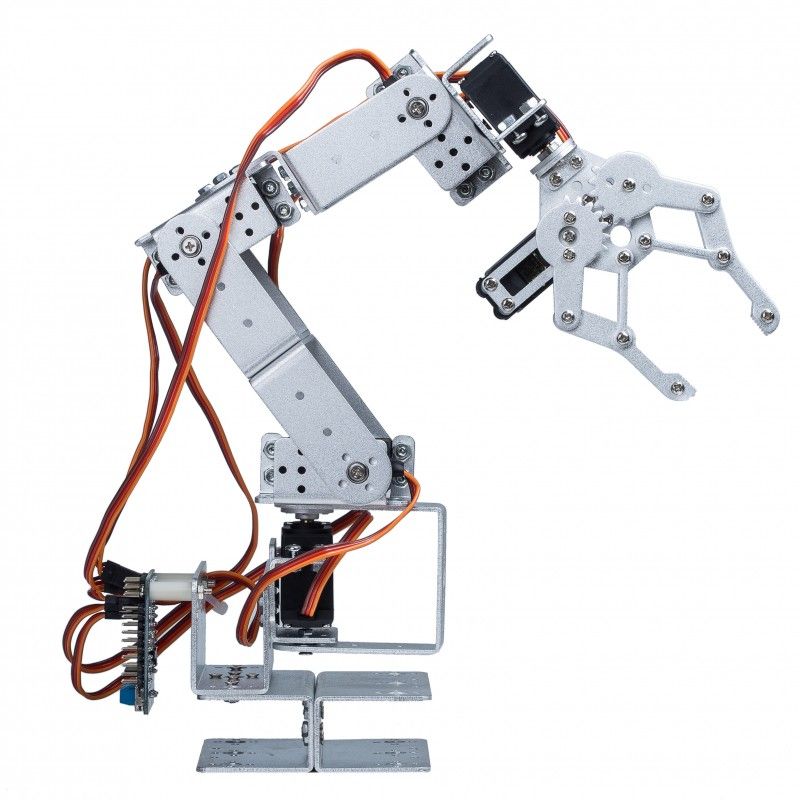 Соединения такого манипулятора связаны суставами, допускающими вращательное движение (например, в шарнирном роботе) или поступательное (линейное) смещение. Связи манипулятора можно рассматривать как образующие кинематическую цепь. Конек кинематической цепи манипулятора называется конечным эффектором, и он аналогичен человеческой руке.
Соединения такого манипулятора связаны суставами, допускающими вращательное движение (например, в шарнирном роботе) или поступательное (линейное) смещение. Связи манипулятора можно рассматривать как образующие кинематическую цепь. Конек кинематической цепи манипулятора называется конечным эффектором, и он аналогичен человеческой руке.
Роботизированная рука
Конечный эффектор или роботизированная рука может быть спроектирован для выполнения любой требуемой задачи, такой как сварка, захват, вращение и т. Д., В зависимости от применения. Например, робот-манипулятор на автомобильных сборочных линиях выполняет множество задач, таких как сварка и вращение деталей и их размещение во время сборки. В некоторых случаях желательна тесная эмуляция человеческой руки, как в роботах, предназначенных для проведения бомбардировки и уничтожения бомб.
Типы
Cartesian robot / Gantry robot: Используется для забора и работы на месте, применения герметика, сборочных операций, обработки станков и дуговой сварки. Это робот, чья рука имеет три призматических сустава, оси которых совпадают с картезианским координатором.
Это робот, чья рука имеет три призматических сустава, оси которых совпадают с картезианским координатором.
Цилиндрический робот: используется для сборочных операций, обработки на станках, точечной сварки и обработки на литьевых машинах. Это робот, оси которого образуют цилиндрическую систему координат.
Сферический робот / Полярный робот Используется для обработки станков, точечной сварки, литья под давлением, футеровки, газовой сварки и дуговой сварки. Это робот, оси которого образуют полярную систему координат.
Робот SCARA: Используется для забора и работы на месте, применения герметика, сборочных операций и обработки станков. Этот робот оснащен двумя параллельными вращающимися шарнирами для обеспечения соответствия в плоскости.
Сочлененный робот: Используется для сборочных операций, литья под давлением, футеровки, газовой сварки, дуговой сварки и окраски распылением. Это робот, чья рука имеет по крайней мере три вращающихся сустава.
Параллельный робот: одно использование — мобильная платформа, управляющая симуляторами кабины экипажа. Это робот, руки которого имеют одновременно призматические или вращательные суставы.
Это робот, руки которого имеют одновременно призматические или вращательные суставы.
Антропоморфный робот: он имеет форму, напоминающую человеческую руку, то есть с независимыми пальцами и большими пальцами.
Известные роботизированные руки
В космосе космическая система пускового манипулятора, также известная как Canadarm или SRMS и ее преемник Canadarm2, являются примерами нескольких степеней свободы роботизированных рук. Эти роботизированные рычаги использовались для выполнения множества задач, таких как осмотр космического челнока с использованием специально развернутой стрелы с камерами и датчиками, прикрепленными к концевому эффектору, а также маневрами для развертывания спутников и извлечения из грузового отсека космического челнока.
Роузер любопытства на планете Марс также использует роботизированную руку.
Недорогие роботизированные вооружения
В десятилетие 2010 года значительно увеличилось наличие недорогих роботизированных вооружений. Хотя такие роботизированные вооружения в основном продаются как хобби или образовательные устройства, были предложены приложения в лабораторной автоматизации, такие как их использование в качестве автосамплеров.
Сочлененный робот
Сочлененный робот — это робот с вращающимися шарнирами (например, робот-робот или промышленный робот). Сочлененные роботы могут варьироваться от простых двухсоставных конструкций до систем с 10 или более взаимодействующими соединениями. Они питаются от различных средств, включая электродвигатели.
Некоторые типы роботов, такие как роботизированные руки, могут быть сформулированы или не сочленены.
Определения
Сочлененный робот: см. Рисунок. Сочлененный робот использует все три револьверных соединения для доступа к своему рабочему пространству. Обычно суставы располагаются в «цепочке», так что одно соединение поддерживает еще одну цепь.
Непрерывный путь: схема управления, посредством которой входы или команды определяют каждую точку вдоль желаемого пути движения. Путь контролируется скоординированным движением суставов манипулятора.
Степени свободы (DOF): количество независимых движений, в которых конечный эффектор может двигаться, определяемый числом осей движения манипулятора.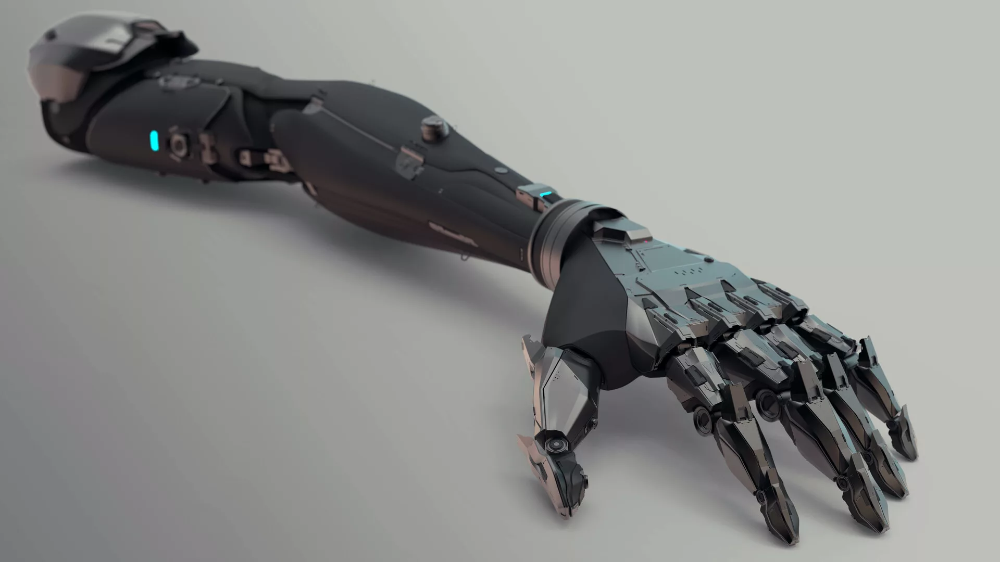
Захват: устройство для захвата или удержания, прикрепленное к свободному концу последней ссылки манипулятора; также называемый рукой робота или конечным эффектором.
Полезная нагрузка: максимальная полезная нагрузка — это величина веса, переносимая манипулятором робота с пониженной скоростью при сохранении номинальной точности. Номинальная полезная нагрузка измеряется с максимальной скоростью при сохранении номинальной точности. Эти оценки сильно зависят от размера и формы полезной нагрузки.
Цикл выбора и места: см. Рисунок. Выбор и размещение цикла — это время, в секундах, для выполнения следующей последовательности движения: перемещение на один дюйм, захват номинальной полезной нагрузки; двигаться на один дюйм; двигаться через двенадцать дюймов; двигаться на один дюйм; ungrasp; двигаться на один дюйм; и вернуться в исходное местоположение.
Достижение: максимальное горизонтальное расстояние от центра базы робота до конца его запястья.
Точность: см. Рис. Разница между точкой, которую пытается достичь робот, и фактической результирующей позицией.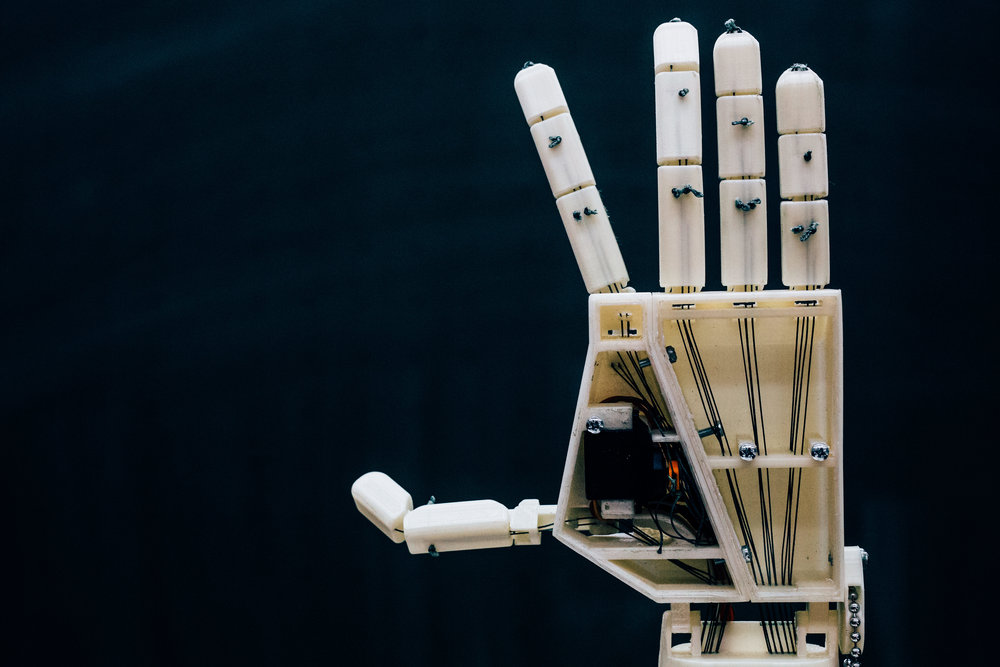 Абсолютная точность — это разница между точкой, заданной системой управления роботом, и точкой, фактически достигнутой рычагом манипулятора, в то время как повторяемость — это изменение цикла манипулятора манипулятора, когда оно нацелено на одну и ту же точку.
Абсолютная точность — это разница между точкой, заданной системой управления роботом, и точкой, фактически достигнутой рычагом манипулятора, в то время как повторяемость — это изменение цикла манипулятора манипулятора, когда оно нацелено на одну и ту же точку.
Повторяемость: см. Рис. Способность системы или механизма повторять одно и то же движение или достичь тех же точек, когда они представлены с одинаковыми сигналами управления. Ошибка цикла-цикла при попытке выполнить определенную задачу
Разрешение: см. Рисунок. Наименьшее приращение движения или расстояния, которое может быть обнаружено или контролироваться системой управления механизмом. Разрешение любого соединения является функцией импульсов энкодера на оборот и коэффициент передачи и зависит от расстояния между центральной точкой инструмента и осью соединения.
Программа роботов: программа для обмена роботами для IBM и совместимых персональных компьютеров. Предоставляет функции эмуляции терминала и функции полезности. Эта программа может записывать всю память пользователя и часть системной памяти на файлы диска.
Эта программа может записывать всю память пользователя и часть системной памяти на файлы диска.
Максимальная скорость: составная максимальная скорость кончика робота, движущегося при полном растяжении, со всеми суставами, движущимися одновременно в дополнительных направлениях. Эта скорость является теоретическим максимумом и ни при каких обстоятельствах не должна использоваться для оценки времени цикла для конкретного приложения. Лучшим показателем скорости реального мира является стандартное двенадцатицилиндровое время выбора и времени цикла. Для критических приложений лучшим показателем достижимого времени цикла является физическое моделирование.
Servo Controlled: управляется управляющим сигналом, который определяется ошибкой между текущим положением механизма и желаемой выходной позицией.
Через точку: точка, через которую инструмент робота должен проходить без остановки; через точки запрограммированы для того, чтобы выйти за пределы препятствий или привести руку в более низкую инерционную осанку для части движения.
Рабочий конверт: трехмерная форма, определяющая границы, которыми может манипулировать манипулятор робота; также известный как охват охвата.
Robotic Arms
Главная > Robotic Arms
Манипуляторы Interbotix серии X предназначены для обучения и исследований с поддержкой ROS + ROS2 (Melodic, Noetic и Galactic), Moveit, Gazebo и MATLAB®, а также демо и обучающие видеоролики, которые помогут вам начать работу с вашей платформой менее чем за час. Серия X предлагает на выбор множество различных моделей с вариантами 4, 5 и 6 степеней свободы и полезной нагрузкой от 50 до 750 г. Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Робот-манипулятор ViperX 300, 6 степеней свободы
Цена: $5 695,95
Робот-манипулятор ViperX 300
Цена: 4895,95 долларов США
Робот-манипулятор ViperX 250
Цена: 4 295,95 долларов США
Робот-манипулятор WidowX 250, 6 степеней свободы
Цена: 3295,95 долларов США
Робот-манипулятор WidowX 250
Цена: 2895,95 долларов США
Рука робота WidowX 200
Цена: 2595,95 долларов США
Робот-манипулятор ReactorX 200
Цена: 1949,95 долларов США
Робот-манипулятор ReactorX 150
Цена: 1549,95 долларов США
Робот-манипулятор PincherX 150
Цена: $1049,95
Рука робота PincherX 100
Цена: $649,95
Мобильный робот-манипулятор WidowX 250, 6 степеней свободы
Цена: $3249,95
RPI4 / PS4 Bluetooth Control Set (ROS)
Цена: $199,95
Interbotix ROS Arm Vision Kit
Цена: $379,95
Серия высокоточных 6-осевых коботов DOBOT CR с полезной нагрузкой до 16 кг.
идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
Коллаборативный робот DOBOT CR серии CR3
Цена: $19 990,00
Коллаборативный робот DOBOT CR серии CR5
Цена: $22 990,00
Коллаборативный робот DOBOT CR серии CR10
Цена: $31 990,00
Коллаборативный робот DOBOT CR серии CR16
Цена: $34 990,00
Промышленный настольный робот DOBOT MG400
Цена: $2,699. 00
00
Захваты и рабочие органы предназначены для работы с новейшими коботами, представленными на рынке. Эти захваты отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте опций. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долларов США
Захват для пальцев RG6
Цена: $5945,00
Захват пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: 4 201,00 долл. США
США
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Gecko Single Pad Gripper
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $945,00
OnRobot Eyes
Цена: $6 519,00
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $532,00
Устройство двойной быстрой замены
Цена: 2 522,00 долл. США
США
Адаптивный параллельный захват AG-145
Цена: 4099,95 долларов США
Адаптивный параллельный захват AG-95
Цена: $3899,95
Параллельный захват PGC 140 для совместной работы
Цена: 2 599,95 долл. США
Параллельный захват для совместной работы PGC 300
Цена: 3 299,95 долл. США
Параллельный захват для совместной работы PGC 50
Цена: 2399,95 долларов США
PGE-15 Тонкий параллельный захват
Цена: $849,95
Тонкий параллельный захват PGE-5
Цена: $849,95
Тонкий параллельный захват PGE-50
Цена: $849,95
Тонкий параллельный захват PGE-8
Цена: $849,95
Роторный захват для коботов RGI-14
Цена: 2349,95 долларов США
Роторный захват для коботов RGI-30
Цена: 2 499,95 долларов США
Конечные эффекторы и захваты для коботов
Главная > Роботы-манипуляторы > Промышленные рабочие органы
Захваты и рабочие органы, предназначенные для работы с новейшими коботами, представленными на рынке, отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте вариантов. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долл. США
Захват для пальцев RG6
Цена: $5945,00
Захват для пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: $4 201,00
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Односторонний захват Gecko
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $945,00
OnRobot Eyes
Цена: 6 519,00 долларов США
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $532,00
Двойной быстросменный блок
Цена: 2 522,00 долл.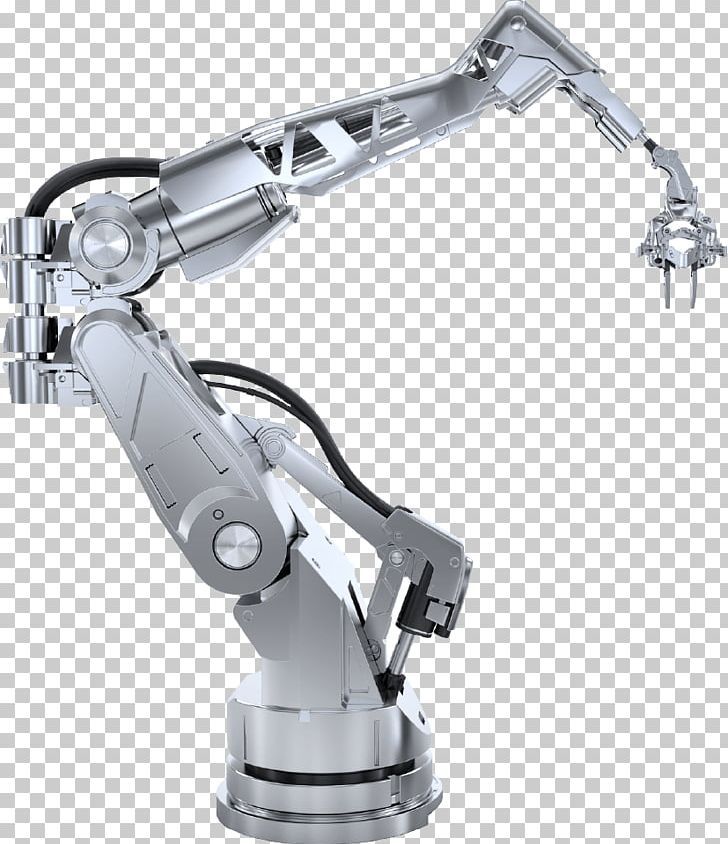 США
США
Адаптивный параллельный захват AG-145
Цена: $4099,95
Адаптивный параллельный захват AG-95
Цена: $3899,95
Параллельный захват для совместной работы PGC 140
Цена: 2599,95 долларов США
Параллельный захват для совместной работы PGC 300
Цена: 3 299,95 долл. США
Параллельный захват PGC 50 для совместной работы
Цена: $2,399,95
Тонкий параллельный захват PGE-15
Цена: $849,95
Тонкий параллельный захват PGE-5
Цена: $849,95
PGE-50 Тонкий параллельный захват
Цена: $849,95
Тонкий параллельный захват PGE-8
Цена: $849,95
Роторный захват для коботов RGI-14
Цена: 2349,95 долларов США
Роторный захват для коботов RGI-30
Цена: $2 499,95
Промышленный робот-манипулятор и компоненты робота
 org/BreadcrumbList»>
org/BreadcrumbList»>Дом
Роботизированные руки и компоненты robolink®
robolink® DP — это 4- или 5-осевой манипулятор с самосмазывающимися пластиковыми соединениями, не требующими технического обслуживания. Он может быть спроектирован как с нашей интегрированной системой управления, так и без нее. Другие особенности включают оптимизированную опору подшипника для каждой оси для уменьшения люфта, полезную нагрузку до 30 Н, время цикла от 6 секунд и досягаемость до 790мм. Мы предлагаем robolink® DP малого или большого размера, а также энкодеры двигателей и приводов по запросу. Мы также можем настроить робота-манипулятора, используя перечисленные ниже компоненты, в соответствии с вашими конкретными требованиями.
Если вы ищете еще более дешевые решения, не требующие высокой скорости и/или точности, рассмотрите robolink® DCI или DC, наши роботы-манипуляторы «Legacy Series». Он оснащен теми же самосмазывающимися пластиковыми соединениями, что и robolink® DP, и его можно приобрести в виде готового робота или настроить с помощью нашего конструктора robolink®.
Области применения/отрасли
- Погрузочно-разгрузочные работы и сборка
- Сварка, покраска и сверление
- Автомобилестроение
- Pick and place
® Лист технических данных 0 DP 0 0002 Загрузить robolink
Купить robolink
® Роботизированные руки DP с 4 или 5 степенями свободы
- Полезная нагрузка до 30 Н, время цикла > 6 с, вылет до 790 мм
- Доступна версия DPI со встроенной системой управления
- Энкодеры двигателя и привода доступны по запросу
- Оптимизированная опора подшипника для каждой оси с учетом люфта
Купить robolink® DP
Независимо от того, заинтересованы ли вы в полностью собранных решениях «под ключ» или хотите создать собственный настраиваемый проект, позвольте нам помочь вам с решением, основанным на вашем конкретном приложении и требованиях. Свяжитесь с нами через форму ниже или позвоните нам по телефону (800) 521-2747 и обсудите ваш проект уже сегодня!
Свяжитесь с нами через форму ниже или позвоните нам по телефону (800) 521-2747 и обсудите ваш проект уже сегодня!
Связаться со специалистом
Компоненты для роботов в магазине
Волновой редуктор drygear®
- Компактная конструкция
- Доступная передача: 28:1
- Стандартный вариант двигателя: шаговый двигатель NEMA11 или 17
- INI-Kit для нулевого положения, опционально адаптируемый шестерня
Роботизированные суставы
- Опорно-поворотный подшипник (iglide® PRT) с пластиковым корпусом
- Основным компонентом является червячная передача
- Кабели могут проходить через центральное отверстие
- Соединения можно заказать с двигателем или без него
Обзор роботизированных суставов
Ось вращения с двигателем
- Роботизированный шарнир robolink® D, симметричный — с двумя опорно-поворотными устройствами PRT с прямым приводом
- Основным компонентом является червячная передача, и тросы могут быть проведены через центральное отверстие
- Самоблокирующийся привод
- Горизонтальное применение на опорной плите
Магазинная ось вращения с двигателем
Волновые редукторы с двигателями
- Установочный размер: 17 с NEMA17/размер фланца 42 мм
- Дополнительные соединения двигателя: провод, разъем, энкодер и тормоз
Магазин волновых редукторов с двигателями
Редуктор с консольным приводом
- Линейный редуктор обеспечивает различные ходы в приложении.
