Содержание
Тeхбионик
Previous
Next
-
Великий Новгород22 декабря 2021
Интеллектуальная собственность как фактор инновационного развития Новгородской области
Приняли участие в выставке и конференции….
Подробнее -
Москва25 ноября 2021
Премия ВОИР-2021
Руководитель Техбионик стал лауреатом премии….
Подробнее -
Москва22-28 августа 2021
фестиваль РобоАрмия в рамках МВТФ «Армия-2021»
Приняли участие в выставке и фестивале….
Подробнее -
Санкт-Петербург2-5 июня 2021
Петербургский международный экономический форум
Протезы SmartLi на стенде Новгородской области.
 …
…
Подробнее -
Великий Новгород19-21 мая 2021
Международная ассамблея молодых изобретателей
Представили разработки на выставке….
Подробнее -
Москва23-24 декабря 2020
Надежда на технологии 2020
Участвовали в выставке и конференции….
Подробнее -
Главный эфир01 декабря 2020
Программа Главный эфир Новгородского областного телевидения
Стали гостями программы….
Подробнее -
Кибатлетика СЗ 202031 августа 2020
Открытое первенство Северо-Запада по Кибатлетике
Приняли участие в выставке и сорвенованиях.
…
Подробнее -
Великий Новгород11 августа 2020
Startup Village-2020
Вместе с ПРОП «МП «ОРТЕЗ» испытали опытные биомеханические роботизированные ортезы….
Подробнее -
Startup Village-2020 — 21-22 мая 2020
Startup Village-2020 в Сколково
Виртуальную выставку посетили более 130 тыс. гостей….
Подробнее -
Здравоохранение 2019 — 7-11 декабря 2019
Здравоохранение 2019 в Экспоцентре
Приняли участие в национальном форуме….
Подробнее -
III медицинский инвестиционный форум — 26 ноября 2019
III Международный медицинский инвестиционный форум»
Представили протезы на выставке на III ММИФ.
…
Подробнее -
Инваэкспо 2019 — 31.10-02.11 2019
Выставка Инваэкспо-2019 на ВДНХ
Техбионик представила свои протезы….
Подробнее -
Открытые инновации 2019 — 21-23 октября 2019
В Сколково прошел форум «Открытые инновации»
Приняли участие в выставке Startup Expo….
Подробнее -
II производственное совещание — 13 сентября 2019
В Великом Новгороде прошло II производственное совещание
Техбионик представило свои разработки на профильной выставке….
Подробнее -
Протезы рук SmartLi во Пскове — 20 августа 2019
Презентация в Псковском отделении ВОИ
Двое псковичей станут нашими пилотами.
…
Подробнее -
Опоры России — 28 июня 2019
В Великом Новгороде прошел XIV Съезд лидеров «ОПОРЫ РОССИИ»
Мероприятие посетил глава «Корпорации МСП»….
Подробнее -
Innommed 2019 — 1 июня 2019
В форуме InnoMed-2019 в Пензе приняло участие около 700 человек
Наша компания представила свою продукцию….
Подробнее -
VII съезд ЦПТИ — 30 мая 2019
VII съезд центр поддержки технологий и инноваций
Делегация Роспатента приняла участие в открытии съезда….
Подробнее -
Новгородский ОПК — 29 марта 2019
Юрий Борисов ознакомился с гражданской продукцией Новгородского ОПК
В рамках экспозции продукции представили наши разработки.
…
Подробнее -
Радио КП — 7 февраля 2019
Компания Техбионик стала гостем программы радио Комсомольская правда
Рассказали о протезирования рук и наших планах на будущее….
Подробнее -
Красногорск — 15 декабря 2018
Московский областной молодежный форум инноваций и предпринимательства
Наша компания представила свои разработки на тематической выставке…
Подробнее -
Надежда на технологии — 4-5 декабря 2018
Национальный форум Надежда на технологии
Представлены образцы бионических протезов пальцев…
Подробнее -
Урок в Марёво — 23 ноября 2018
Урок в Маревской школе
Рассказали про разработки старшекласникам Маревской школы.
..
Подробнее -
Инженерный форум — 22 ноября 2018
Московский международный инженерный форум
В столице прошел VI Московский международный инженерный форум…
Подробнее -
СЗ промышленный форум — 1 ноября 2018
Северо-Западный промышленный форум
На совместной экспозиции с АО «НПО «КВАНТ» представлен образец экзоскелета…
Подробнее -
Практикум УНТИ — 29 сентября 2018
Практикум для студентов УНТИ в НовГУ
В НовГУ для студентов УНТИ прошел практикум по разработке бионических протезов…
Подробнее -
Биотехмед — 10-11 сентября 2018
Биотехмед-2018 в Геленджике
Выставка медицинской продукции в рамках форума Биотехмед.
..
Подробнее -
Первое производственное совещание — 5 сентября 2018
Первое производственное совещание в Великом Новгороде
Подписано соглашение о формировании Медико-реабилитационного кластера…
Подробнее -
Армия 2018 — 21-26 августа 2018
Инновационный клуб на Армии 2018
На тематической выставке представлены модульные бионические протезы…
Подробнее -
Детский бионический протез — 22 августа 2018
Передача детского протеза
Опытный образец бионического протеза руки передан девочке из ЛО…
Подробнее -
Инномед 2018 — 7-8 июня 2018
Инномед 2018
В Пензе прошел Всероссийский форум Инномед-2018.
..
Подробнее -
Форум Здоровье нации — 30 мая 2018
Форум «Здоровье нации»
В Москве прошел Всероссийский форум «Здоровье нации — основа процветания России»…
Подробнее -
Стартап-тур в Великом Новгороде — 18 апреля 2018
Стартап-тур в Великом Новгороде
Региональный этап стартап-тура «Открытые инновации»…
Подробнее -
Съезд травматологов-ортопедов — 11-13 апреля 2018
XI Всероссийский съезд травматологов-ортопедов»
На выставке в рамках съезда представлены медицинские и реабилитационные изделия…
Подробнее -
Локомотивы роста — 13 марта 2018
Форум СЗФО «Локомотивы роста: цифровая экономика и новое производство»
Форум прошел в Политехническом университете Петра Великого.
..
Подробнее -
Визит министра — 22 января 2018
Визит Максима Топилина в Новгородскую область»
Министр труда и социальной защиты посетил Великий Новгород…
Подробнее
 …
…
 …
…
 …
…
 …
…
 ..
..
 ..
..
 ..
..
 ..
..
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
Исследования осуществляются при грантовой поддержке Фонда Сколково и Фонда содействия инновациям
Система менеджмента качества соответствует стандарту ГОСТ ISO 13485-2017 “Система менеджмента качества медицинских изделий”
Модульные бионические протезы руки ®
- модульная компоновка: применение при различных случаях ампутаций (части кисти, предплечья, плеча)
- три типоразмера: возможность протезирования детей от 5 лет, подростков и взрослых
- рабочий протез: точные схваты c набором сменных губок и насадок
- широкие возможности управления: ручное, одно-/двухканальное биоэлектрическое или миотоническое управление
- удобство использования: несколько программируемых шаблонов адаптивных к форме предмета схватов
- кастомизация: индивидуальный дизайн и совместимость с косметическими оболочками
- сенсорная система обратной связи: выполнение захватов хрупких предметов с контролируемым усилием
- тактильный отклик: тактильные сигналы от протеза к пользователю облегчают взаимодействие и управление
- кроссплатформенное приложение: повышение удобства управления протезом
- распознавание жестов: быстрое переключение схватов, отслеживание активности для оптимизации работы протеза
- поддержка сенсорных экранов и NFC: работа со смартфонами, системами контроля доступа
- интеллектуальный контроль АКБ: повышений срок службы и безопасность
Модульные ортезы верхних конечностей
- при нарушении двигательных функций легкой и средней тяжести: при ДЦП, постинсультных состояниях, травмах и т. п.
- изготавливаются индивидуально: ортопедическая коррекция, предотвращение вторичных деформаций конечности
- режим тренировок: работа в качестве тренажера механотерапии
- работа с ЭМГ и ЭЭГ интерфейсами: восстановление биологической обратной связи
- модульная конструкция узлов: подбор степени роботизации конечности под конкретного пользователя
 п.
п.
Биомеханический роботизированный ортез (нейромодуль ортеза)
- при нарушении двигательных функций нижних конечностей: при ДЦП, постинсультных состояниях, травмах и т.п.
- емкий аккумулятор: возможность повседневного применения в течении дня
- изготавливаются индивидуально: ортопедическая коррекция, предотвращение вторичных деформаций конечности
- из композиционных материалов: небольшая масса, высокая скорость перемещения
- кастомизация: возможность выбора индивидуального дизайна ортеза
Экзотренажер кисти
- пассивная механотерапия: при нарушениях двигательных функций кисти
- работа по заданной программе: можно применять вне стационара
- независимое движение пальцев, лз-сустава: создание различных реабилитационных программ
- сенсорный контроль: отслеживание параметров сгибания каждого пальца, лз-сустава
- анатомическое сгибание и разгибание пальцев: повышенный комфорт для пользователя
- внешний интерфейс связи: возможна работа в составе реабилитационного комплекса на базе ПК
- работа с ЭМГ и ЭЭГ интерфейсами: восстановление биологической обратной связи
Утрата верхних конечностей перестанет быть серьезной проблемой – Наука – Коммерсантъ
6K
2
9 мин.
…
Рука человека — универсальный инструмент, способный как выполнять силовые операции, так и аккуратно и надежно удерживать хрупкие предметы. Утрата верхних конечностей является одной из древнейших проблем человечества, решение которой стало возможным благодаря научному и техническому прогрессу.
Предыдущая фотография
С каждой новой моделью бионические протезы верхних конечностей по виду и функциональности все больше приближаются к человеческим рукам
Фото:
Коммерсантъ / Юрий Мартьянов
/ купить фото
Stradivary (Моторика, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Следующая фотография
1
/
4
С каждой новой моделью бионические протезы верхних конечностей по виду и функциональности все больше приближаются к человеческим рукам
Фото:
Коммерсантъ / Юрий Мартьянов
/ купить фото
Stradivary (Моторика, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
От железной руки до бионического протеза
Задачу замены утраченных конечностей человечество пыталось решить еще в античности. Самым известным протезом средневековья является «железная рука» рыцаря фон Берлихингена, сделанная в 1504 году. Протез был похож на железную перчатку с пятью пальцами, которые с помощью шестерни могли поворачиваться и фиксироваться, что позволяло удерживать предметы или оружие. Крепился протез к руке кожаными ремнями. Примерно в ту же эпоху подвижные искусственные конечности сконструировал француз Амбруаз Паре. В начале XIX века немецкий стоматолог и хирург Петер Балифф придумал способ управлять пальцами протеза при помощи движения локтевого сустава. Для этого были использованы тяги, закрепленные на плече пациента так, что при разгибании локтевого сустава пальцы разгибались и, наоборот, для захвата предмета протезом необходимо было согнуть локоть.
Самым известным протезом средневековья является «железная рука» рыцаря фон Берлихингена, сделанная в 1504 году. Протез был похож на железную перчатку с пятью пальцами, которые с помощью шестерни могли поворачиваться и фиксироваться, что позволяло удерживать предметы или оружие. Крепился протез к руке кожаными ремнями. Примерно в ту же эпоху подвижные искусственные конечности сконструировал француз Амбруаз Паре. В начале XIX века немецкий стоматолог и хирург Петер Балифф придумал способ управлять пальцами протеза при помощи движения локтевого сустава. Для этого были использованы тяги, закрепленные на плече пациента так, что при разгибании локтевого сустава пальцы разгибались и, наоборот, для захвата предмета протезом необходимо было согнуть локоть.
После Второй мировой войны для передачи движения пальцам протеза стали использоваться электрические двигатели. В конце 1960-х годов была разработана первая миоэлектрическая система управления, в основе которой лежат методы регистрации и анализа мышечных биопотенциалов (электромиограмма, ЭМГ) человека. Несколько электродов закрепляются на поверхности кожи человека и позволяют измерять электрические импульсы, которые возникают при напряжении и расслаблении мышцы. Эти импульсы через электронные преобразователи передаются к моторам, которые перемещают пальцы. Таким образом, при помощи напряжения и расслабления определенной группы мышц человек может управлять работой протеза. Такие протезы называются бионическими (от древнегреч. — живущее), то есть являются решениями, непосредственно заимствованными у живой природы.
Несколько электродов закрепляются на поверхности кожи человека и позволяют измерять электрические импульсы, которые возникают при напряжении и расслаблении мышцы. Эти импульсы через электронные преобразователи передаются к моторам, которые перемещают пальцы. Таким образом, при помощи напряжения и расслабления определенной группы мышц человек может управлять работой протеза. Такие протезы называются бионическими (от древнегреч. — живущее), то есть являются решениями, непосредственно заимствованными у живой природы.
Четыре вида протезов
«Железная рука» рыцаря фон Берлихингена, сделанная в 1504 году
Фото: wikimedia.org
Протезы верхних конечностей разделяются на две основные группы — пассивные (косметические и функциональные) и активные (тяговые и миоэлектрические).
Косметические протезы являются высококачественными муляжами здоровой руки, хотя и позволяют выполнять некоторые простые действия, например, поддерживание и толкание предметов. При этом технологии производства косметических протезов могут быть использованы при изготовлении съемных оболочек активных протезов.
При этом технологии производства косметических протезов могут быть использованы при изготовлении съемных оболочек активных протезов.
К функциональным протезам относятся протезы с возможностью смены насадок, которые могут быть выполнены в виде различных инструментов — крюк, зажим, кольцо, гаечный ключ, молоток и др.
Kleiber Trio (Клайбер бионикс, Россия)
Тяговые протезы представляют собой простейшую версию активных протезов и приводятся в движение при помощи сгибания локтевого сустава, вследствие чего обладают ограниченной функциональностью за счет всего лишь одного варианта сжатия пальцев.
Электромеханические роботизированные (бионические) протезы являются наиболее эффективными решениями для протезирования, так как способны более точно копировать кинематику кисти руки здорового человека за счет использования нескольких независимых приводов для пальцев. Использование большего числа степеней свободы (как правило, пяти-шести) по сравнению с тяговыми протезами позволяет управлять положением пальцев, за счет чего становится возможным выполнение сложных сочетаний движений и реализация разнообразных положений пальцев (паттернов), что позволяет эффективнее захватывать предметы.
Особенности бионических протезов
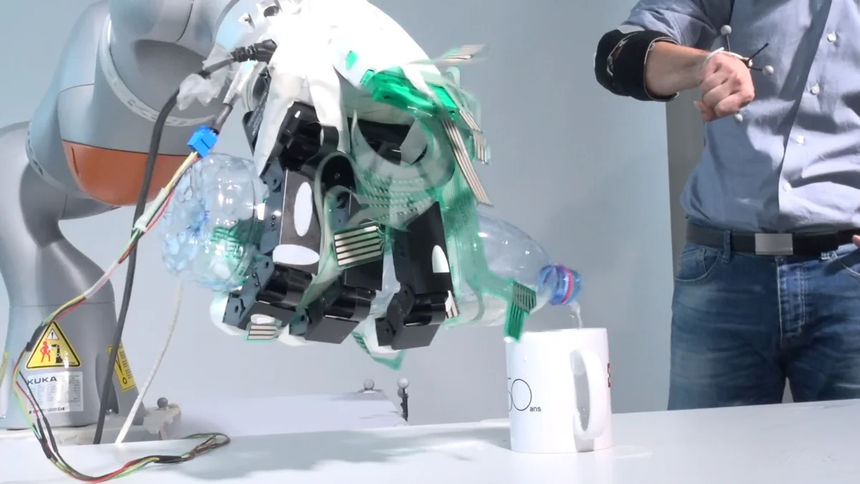
Последнее десятилетие отмечено высокой активностью среди разработчиков антропоморфных манипуляторов захвата для роботов и бионических протезов рук. В подобных манипуляторах для роботов (DLR Hand II Аэрокосмического центра Германии, Shadow Dexterous Hand компании Shadow Robotics) используются до 22 приводов для управления пальцами, применяются тактильные сенсоры на контактных площадках. Система управления позволяет автоматически схватывать предметы различных форм. Но в качестве протезов подобные решения использоваться не могут из-за большой массы и габаритов предплечья, в котором размещаются сервоприводы. Поэтому, в отличие от антропоморфных манипуляторов, для роботов в бионических протезах используются ограниченный набор приводов и специальная конструкция пальца, в которой дистальная фаланга объединяется с медианной для снижения числа подвижных элементов. Это необходимо, чтобы снизить массу протеза и разместить электронику и моторы внутри кисти, так как автономная кисть позволяет выполнять протезирование с различной степенью ампутации предплечья.
Luke Arm (DEKA Research, США)
Своими успехами разработчики бионических протезов обязаны последним достижениям науки и техники в области аккумуляторов высокой плотности, появлению различных сенсорных устройств, позволяющих бионической руке чувствовать и ощущать взаимодействие с объектами подобно человеку, компактных электрических моторов, высокая эффективность которых обусловлена прогрессом в области производства магнитов на основе редкоземельных металлов. А также микропроцессорам, способным с высокой скоростью обрабатывать информацию от множества сенсоров и принимать решение по управлению приводами пальцев для достижения заданного положения.
Благодаря 22 степеням свободы кисть человека позволяет выполнять сложные сочетания движений, захватывать предметы различной формы. Развитая система осязания дает возможность захвата предметов на ощупь, а также надежно удерживать и выполнять манипуляции.
Современные бионические протезы обладают широким набором вариантов сжатия, специально разработанных для повседневных задач. Управление режимами работы таких протезов может осуществляться как за счет регистрации биопотенциалов на остаточных группах мышц пользователя, так и электрической активности головного мозга, либо при помощи специальной панели управления.
Управление режимами работы таких протезов может осуществляться как за счет регистрации биопотенциалов на остаточных группах мышц пользователя, так и электрической активности головного мозга, либо при помощи специальной панели управления.
DynamicArm (OttoBock, Германия)
Для пользователя на данный момент недоступно непосредственное управление движением каждого отдельного пальца протеза. Это обусловлено отсутствием коммерческих решений для интеграции с существующими бионическими протезами, а также сложностью в реализации устройств многоканального захвата биосигналов человека. В лаборатории прикладных кибернетических систем МФТИ под руководством Т.К. Бергалиева ведутся разработки в области человеко-машинных интерфейсов на основе биосигналов человека. В частности, там разработана восьмиканальная система управления на основе ЭМГ-сигналов, позволяющая регистрировать интегральную активность мышц предплечья, повышая тем самым количество управляемых степеней свободы. Для коммерциализации разработанной технологии была создана компания ООО «Гальвани-Бионикс», получившая поддержку Фонда содействия развитию малых форм предприятий в научно-технической сфере.
Для коммерциализации разработанной технологии была создана компания ООО «Гальвани-Бионикс», получившая поддержку Фонда содействия развитию малых форм предприятий в научно-технической сфере.
Michelangelo (OttoBock, Германия)
Будущий пользователь может научиться пользоваться протезом с помощью специального программного обеспечения, позволяющего посредством миоэлектрических сенсоров управлять виртуальной моделью будущего протеза. К обучению можно приступать уже на ранних послеоперационных стадиях подготовки к установке бионического протеза, так как для установки протеза требуется изготовить индивидуальную приемную гильзу и может пройти продолжительное (до шести месяцев) время до сформирования окончательной культи.
Зарубежные разработчики протезов часто уделяют преувеличенное внимание количеству паттернов движения (жестов) пальцев, которое иногда доходит до 15-20. Для повседневного использования такое избыточное число не требуется и даже может создать неудобство, так как в течение дня приходится часто переключаться между наиболее подходящими паттернами, при этом используются, как правило, пять-шесть вариантов.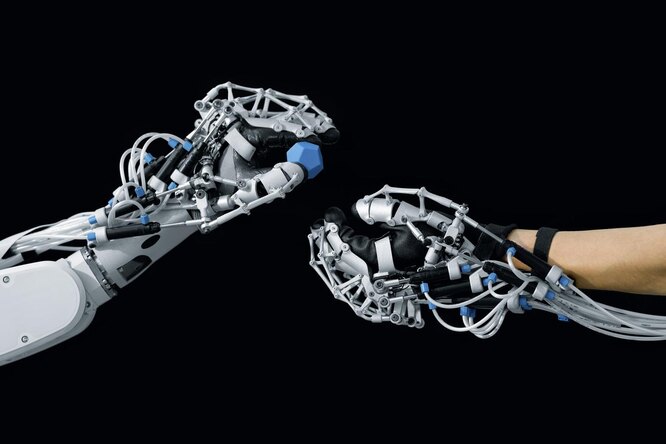 При помощи бионических протезов человек может выполнять различные бытовые действия: пользоваться электро- и столовыми приборами, работать за компьютером, перемещать предметы и сумки, открывать емкости и бутылки, гладить белье, одеваться и многое другое.
При помощи бионических протезов человек может выполнять различные бытовые действия: пользоваться электро- и столовыми приборами, работать за компьютером, перемещать предметы и сумки, открывать емкости и бутылки, гладить белье, одеваться и многое другое.
Российские разработки
Технически различаются два варианта компоновки бионических протезов:
- Размещение моторов внутри ладони (BeBeonic 3 (OttoBock, Германия, 2012), Michelangelo Hand (OttoBock, Германия,2011), «Миотея» ПР2-Б1 («НПФ Галатея», РФ, 2005), Stradivary (ООО «Моторика», РФ, 2016))
- Размещение моторов внутри пальцев и, как следствие, возможность протезировать отдельные пальцы (iLimb Ultra (OSSUR, Исландия, 2008), Evolution 2 (Vincent Systems, Германия, 2015), Kleiber Solo (ООО «Клайбер Бионикс», РФ, 2016)).
Основные преимущества перспективных современных бионических протезов заключаются в следующем:
- Способность надежно захватывать предметы разных форм
- Аккуратный автоматический захват хрупких предметов с учетом развиваемых усилий
- Возможность «осязания» объектов взаимодействия за счет обратной тактильной связи
- Поворот кисти за счет дополнительных приводов
- Стабилизация предмета за счет управления положением запястного сустава.

В России в настоящее время на рынке представлен только один бионический протез «Миотея» компании «НПФ «Галатея»», разработанный более десяти лет назад. «Миотея» является наиболее доступным решением, имеет одну степень свободы и может управляться при помощи одно- или двухканальной системы. В первом случае закрытие и раскрытие кисти производится при помощи одной мышцы, во втором используются разные мышцы. Данный протез значительно уступает по функциональности зарубежным.
Перспективными разработками доступных бионических протезов, не уступающих зарубежным аналогам по функциональности, занимаются отечественные компании ООО «Моторика» (Stradivary) и ООО «Клайбер Бионикс» (Kleiber Solo).
Vincent Evolution 2 (VINCENTsystems, Германия)
Компания «Моторика» представила первый в России детский активный тяговый протез «Киби», предназначенный для выполнения захвата небольших предметов. «Киби» изготавливается по индивидуальным меркам по технологии селективного лазерного спекания порошка. В настоящее время компания «Моторика» разрабатывает предсерийный прототип бионического протеза кисти Stradivary, обладающего шестью степенями свободы с размещением приводов внутри ладони. Протез Stradivary планируется оснащать специальным модулем с функцией умных часов.
В настоящее время компания «Моторика» разрабатывает предсерийный прототип бионического протеза кисти Stradivary, обладающего шестью степенями свободы с размещением приводов внутри ладони. Протез Stradivary планируется оснащать специальным модулем с функцией умных часов.
MyoFacil (OttoBock, Германия)
Линейка разрабатываемых протезов Kleiber компании «Клайбер Бионикс» предназначается для людей с различной степенью ампутации верхних конечностей. Ключевой особенностью этих протезов является использование тактильных сенсоров, размещаемых на подушечках пальцев. Конструктивно тактильный сенсор представляет собой группу контактных площадок, покрытых иммерсионным золотом, поверх которой располагается чувствительный эластомер — композит квантового туннелирования (QTC). Это материал, который в нормальном состоянии является изолятором, но становится проводящим под действием внешних факторов: давления, натяжения или скручивания. Тактильный сенсор позволяет измерять не только нормальную составляющую приложенного воздействия, но и тангенциальную. Измерение последней позволяет значительно улучшить качество системы управления захватом, обеспечивая определение момента начала проскальзывания удерживаемого объекта. Протез дает возможность осязания взаимодействия с предметами, что обеспечивает аккуратный захват легких и хрупких предметов, а пользователь получает обратную тактильную связь. Кисть Kleiber Solo представляет собой сменный модуль, приводимый в движение шестью приводами, который может быть установлен на персональную культеприемную гильзу, а также предназначается для работы в составе протезов руки Kleiber Duo и Trio.
Тактильный сенсор позволяет измерять не только нормальную составляющую приложенного воздействия, но и тангенциальную. Измерение последней позволяет значительно улучшить качество системы управления захватом, обеспечивая определение момента начала проскальзывания удерживаемого объекта. Протез дает возможность осязания взаимодействия с предметами, что обеспечивает аккуратный захват легких и хрупких предметов, а пользователь получает обратную тактильную связь. Кисть Kleiber Solo представляет собой сменный модуль, приводимый в движение шестью приводами, который может быть установлен на персональную культеприемную гильзу, а также предназначается для работы в составе протезов руки Kleiber Duo и Trio.
iLimb Ultra (TouchBionics, Шотландия)
Пользователи протезов Kleiber и Stradivary могут самостоятельно настраивать конфигурацию или выбирать из набора готовых паттернов захвата при помощи специальных мобильных приложений, управление протезами осуществляется при помощи миоэлектрических модулей, входящих в комплект поставки. Заряда аккумуляторов хватает на 10-12 часов активной работы. Стоимость бионических протезов Kleiber и Stradivary в несколько раз ниже зарубежных аналогов.
Заряда аккумуляторов хватает на 10-12 часов активной работы. Стоимость бионических протезов Kleiber и Stradivary в несколько раз ниже зарубежных аналогов.
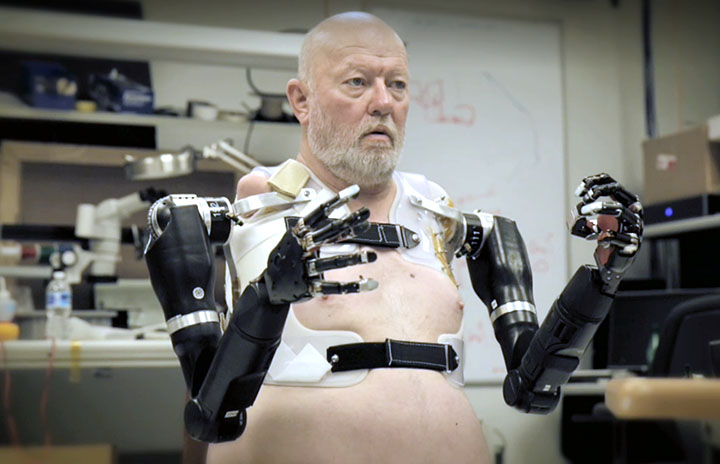
Также компания «Клайбер Бионикс» совместно с разработчиком сервоприводов «РУ.Роботикс» проводят разработку бионического протеза руки выше локтевого сустава Kleiber Duo и Trio. В этих протезах для движения локтевого и плечевого суставов используются до четырех дополнительных приводов. Так, бионические протезы рук для пациентов с ампутацией выше локтевого сустава в данный момент представлены в США (APL’s Modular Prosthetic Limb Университета Джонса Хопкинса и Arm System исследовательского центра DEKA Research) и Германии (DynamicArm компании OttoBock). Для управления такими протезами используются многоканальные системы регистрации биопотенциалов.
Эффект «зловещей долины»
Одной из задач при разработке бионических протезов является преодоление так называемого эффекта «зловещей долины». В 1978 году японский ученый Масахиро Мори при исследовании эмоциональных реакций на внешний вид роботов обнаружил, что люди с симпатией относятся к антропоморфным механизмам до определенного предела человекоподобия. Максимальное же сходство с человеком, наоборот, вызывает у них тревогу, отвращение и страх. Этот крутой провал на графике зависимости симпатии окружающих от человекоподобия робота и получил название «зловещей долины».
В 1978 году японский ученый Масахиро Мори при исследовании эмоциональных реакций на внешний вид роботов обнаружил, что люди с симпатией относятся к антропоморфным механизмам до определенного предела человекоподобия. Максимальное же сходство с человеком, наоборот, вызывает у них тревогу, отвращение и страх. Этот крутой провал на графике зависимости симпатии окружающих от человекоподобия робота и получил название «зловещей долины».
Эффект «зловещей долины» распространяется и на людей, использующих протезы. Одним из способов изменить отношение к таким людям является популяризация протезно-ортопедического оборудования. Это происходит, например, во время Паралимпийских игр, а также впервые прошедших в прошлом году в Швейцарии соревнований среди людей с ограниченными возможностями Cybathlon, в которых одной из дисциплин было соревнование среди пользователей роботизированных протезов рук на ловкость и скорость выполнения манипуляций с предметами.
Возможное будущее (2025 год)
Миотея (НПФ Галетея)
Благодаря достижениям науки и техники люди с ограниченными возможностями смогут в значительной степени восстановить функциональность руки и способность к самообслуживанию. Утрата верхних конечностей перестанет быть серьезной проблемой, влекущей за собой потерю трудоспособности. Ежегодно будут проводиться специальные соревнования среди людей с бионическими протезами, заявки на выплату компенсаций за установку бионических протезов руки начнут приниматься в режиме одного окна, а время восстановления утраченной трудоспособности из-за различной степени ампутаций составит не более двух недель. Но главное, здоровые люди перестанут испытывать дискомфорт при общении с людьми-«киборгами», а роботизированные протезы будут восприниматься как один из гаджетов, наподобие умных часов.
Утрата верхних конечностей перестанет быть серьезной проблемой, влекущей за собой потерю трудоспособности. Ежегодно будут проводиться специальные соревнования среди людей с бионическими протезами, заявки на выплату компенсаций за установку бионических протезов руки начнут приниматься в режиме одного окна, а время восстановления утраченной трудоспособности из-за различной степени ампутаций составит не более двух недель. Но главное, здоровые люди перестанут испытывать дискомфорт при общении с людьми-«киборгами», а роботизированные протезы будут восприниматься как один из гаджетов, наподобие умных часов.
Иван Кречетов
Улучшение контроля для пользователей роботизированных протезов
- UH Home
- Новости и события /
- Улучшение контроля для пользователей роботизированных протезов
Усовершенствованная периферическая нервная система снижает аномальные ощущения пользователя и обеспечить ощущение обратной связи от него.
Марио Игнасио Ромеро-Ортега, профессор биомедицинской инженерии Каллена, создает передовые интерфейсные электроды периферической нервной системы (ПНС) следующего поколения для уменьшения ненормальных ощущений, связанных с электрической стимуляцией протезов конечностей.
Инженер-биомедик из Университета Хьюстона получил от Национального института неврологических расстройств и инсульта 2,8 миллиона долларов на улучшение контроля роботизированных конечностей и обеспечение естественной сенсорной обратной связи от роботизированных протезов к людям с ампутированными конечностями. Марио Игнасио Ромеро-Ортега, профессор биомедицинской инженерии Каллена, добьется этого, создав усовершенствованные интерфейсные электроды для периферической нервной системы (ПНС) следующего поколения.
Периферическая нервная система состоит из всех нейронов, которые существуют за пределами головного и спинного мозга и соединяют центральную нервную систему с остальной частью тела. После ампутации периферические нервы остаются активными и могут быть подключены к электродам и использоваться для записи намерений пользователя о движении и обеспечения обратной связи от него.
«В нашем исследовании будет использоваться инновационный регенеративный многоэлектродный интерфейс со сверхмалыми участками записи с использованием нашей недавно разработанной сверхтонкой многоэлектродной матрицы и включены сигналы молекулярного управления, чтобы влиять на тип сенсорных нейронов в нейронном интерфейсе», — сказал Ромеро. Ортега. «Эта регенеративная ультрамикромультиэлектродная матрица (RUMA) предназначена для различения двигательных и кожных нервных взаимодействий путем сочетания ее с молекулярным управлением для биологической инженерии содержимого сенсорно-моторных аксонов на границе электродов».
Ортега. «Эта регенеративная ультрамикромультиэлектродная матрица (RUMA) предназначена для различения двигательных и кожных нервных взаимодействий путем сочетания ее с молекулярным управлением для биологической инженерии содержимого сенсорно-моторных аксонов на границе электродов».
Приблизительно четыре миллиона людей с ампутированными конечностями во всем мире живут с тяжелыми последствиями. Те, кому повезло, используют протезы с электроприводом, управляемые поверхностными электромиографическими сигналами от неповрежденных мышц культи для движения. Но люди с ампутированной рукой часто прекращают использование из-за отсутствия чувствительности протеза руки, что затрудняет работу. Кроме того, в современных протезах используются электроды, имплантированные непосредственно в остаточный нерв для сенсорного ощущения и контроля протеза. У этого метода есть свои недостатки, в том числе отказ электрода, ухудшение сигнала с течением времени и появление у пользователей аномальных сигналов, таких как «укусы или покалывания», которые препятствуют их использованию.
В сотрудничестве со Стюартом Коганом из Университета Техаса в Далласе и Джозефом Фрэнсисом из Университета Хьюстона это исследование продемонстрирует преимущества использования RUMA для выборочной записи двигательных аксонов. По словам Ромеро-Ортего, этот метод улучшит управление роботизированными протезами за счет выборочной стимуляции сенсорных аксонов, чтобы обеспечить более естественный контроль и ощущения от бионических конечностей.
«Это усовершенствование периферических нейронных интерфейсов для людей с ампутированными конечностями снизит когнитивную нагрузку для пользователей роботизированных протезов и уменьшит ненормальные ощущения, связанные с электрической стимуляцией в ПНС», — сказал Ромеро-Ортега.
Исследование, представленное в этой публикации, было поддержано Национальным институтом неврологических расстройств и инсульта Национального института здравоохранения под номером R01NS124222. Содержание является исключительной ответственностью авторов и не обязательно отражает официальную точку зрения Национальных институтов здравоохранения.
Категории:
Здоровье, исследования, главные новости
Роботизированные протезы конечностей
На этой странице
Авторское право Статьи по теме
В современном обществе ежегодно во всем мире проводится более миллиона ампутаций конечностей из-за несчастных случаев, военных потерь, сердечно-сосудистых заболеваний, опухолей или врожденных аномалий. Роботизированный протез конечности — это хорошо зарекомендовавшая себя область исследований, объединяющая передовую мехатронику, интеллектуальное восприятие и контроль для достижения утраченных сенсомоторных функций более высокого порядка при сохранении физического вида ампутированной конечности. Ожидается, что роботизированные протезы конечностей заменят отсутствующие конечности человека с ампутированной конечностью, восстановив утраченные функции и обеспечив эстетичный внешний вид. Основными аспектами являются расширенное социальное взаимодействие, комфортная жизнь человека с ампутированной конечностью и продуктивная жизнь человека с ампутированной конечностью в обществе. С развитием сенсорных технологий за последние несколько десятилетий в этой области был сделан значительный вклад. Большая часть работы все еще находится на стадии исследований, и в ближайшие годы ожидается проведение дополнительных исследований и разработок, конечной целью которых является создание устройства, способного генерировать движения, подобные человеческим.
Основными аспектами являются расширенное социальное взаимодействие, комфортная жизнь человека с ампутированной конечностью и продуктивная жизнь человека с ампутированной конечностью в обществе. С развитием сенсорных технологий за последние несколько десятилетий в этой области был сделан значительный вклад. Большая часть работы все еще находится на стадии исследований, и в ближайшие годы ожидается проведение дополнительных исследований и разработок, конечной целью которых является создание устройства, способного генерировать движения, подобные человеческим.
Этот специальный выпуск посвящен созданию междисциплинарного форума для обсуждения последних достижений в области роботизированных протезов конечностей. Для публикации в этом специальном выпуске были отобраны пять статей. Двое из них на протезах верхних конечностей, остальные трое – на протезах нижних конечностей.
Одна из статей посвящена роботизированным протезам верхних конечностей. Он предлагает трансрадиальный роботизированный протез с гибридным приводом и несколькими степенями свободы. В большинстве гибридных протезов используется индивидуальное и развязанное управление суставами, а также электрическое приведение в действие или приведение в действие силой тела. Авторы этой статьи внесли свой вклад в разработку роботизированного протеза HyPro. Он использует гибридную концепцию питания для восстановления функций захвата, аналогичную биологической руке. HyPro — это малоактивный робот с 15 степенями свободы, который может выполнять пять моделей захвата: силовой захват, захват кончиком, боковой захват, захват крюком и индексная точка. Механизм с недостаточным приводом может обеспечить требуемую предварительную форму руки для заданной схемы захвата с использованием электроэнергии на этапе предварительного захвата, а мощность тела используется на этапе захвата для выполнения заключительного действия захвата.
В большинстве гибридных протезов используется индивидуальное и развязанное управление суставами, а также электрическое приведение в действие или приведение в действие силой тела. Авторы этой статьи внесли свой вклад в разработку роботизированного протеза HyPro. Он использует гибридную концепцию питания для восстановления функций захвата, аналогичную биологической руке. HyPro — это малоактивный робот с 15 степенями свободы, который может выполнять пять моделей захвата: силовой захват, захват кончиком, боковой захват, захват крюком и индексная точка. Механизм с недостаточным приводом может обеспечить требуемую предварительную форму руки для заданной схемы захвата с использованием электроэнергии на этапе предварительного захвата, а мощность тела используется на этапе захвата для выполнения заключительного действия захвата.
Еще одна статья посвящена трансрадиальным протезам конечностей и предлагает сетевой мультимодельный метод управления протезом, имеющим 2 степени свободы запястья и 1 степень свободы кисти. Цель состоит в том, чтобы улучшить управляемость запястья при обработке информации, полученной от движения сустава. Авторы применили модель манипулятивного навыка схватывания, и она ограничена свойствами предплечья, свойствами схватывания объекта и задачей. Экспериментальные результаты подтверждают, что контроля за слиянием достаточно для управления лучезапястным суставом по отношению к положению рабочей плоскости.
Цель состоит в том, чтобы улучшить управляемость запястья при обработке информации, полученной от движения сустава. Авторы применили модель манипулятивного навыка схватывания, и она ограничена свойствами предплечья, свойствами схватывания объекта и задачей. Экспериментальные результаты подтверждают, что контроля за слиянием достаточно для управления лучезапястным суставом по отношению к положению рабочей плоскости.
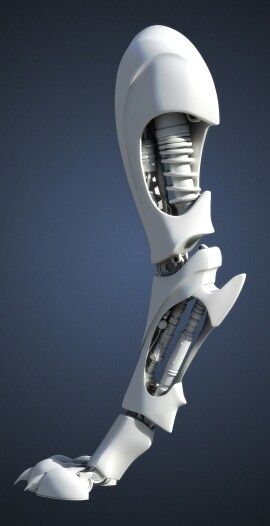
Важно иметь адаптивные возможности протеза стопы, чтобы выполнять основные движения людей с ампутированными конечностями, которые позволяет делать естественная стопа. Авторы одной статьи провели систематический обзор, чтобы понять концепции дизайна адаптивных протезов стопы с использованием метода PRISMA. Кроме того, они изучили требования и проблемы проектирования адаптивных протезов стопы. Кроме того, адаптивные протезы стопы были классифицированы и сравнены. Авторы предсказали, что будущие адаптивные протезы будут состоять из методов регенеративной энергии и будут более удобными для пользователей.
Еще одна статья посвящена транстибиальному роботизированному протезу конечности. Он представляет двухсуставной транстибиальный протез с электроприводом, который представляет собой комбинацию коммерческого протеза голеностопного сустава с электроприводом и моторизованного роботизированного коленного ортеза. Ортез управляется так, чтобы имитировать икроножную мышцу человека на основе нервно-мышечных моделей соответствующих пациентов без ампутированных конечностей. Авторы сравнивали биартикулярное состояние с моноартикулярным состоянием при условии, что ортез ведет себя как свободный сустав. Экспериментальные результаты, полученные у шести участников с транстибиальной ампутацией, не полностью подтверждают гипотезу авторов о снижении метаболизма у всех участников. Однако у некоторых участников наблюдается значительное снижение метаболизма при биартикулярном состоянии. Из предварительных результатов можно предположить, что искусственная икроножная мышца с электроприводом может обеспечить значительное снижение метаболизма по сравнению с моноартикулярным протезом.
Авторы одной из статей разработали и оценили протез, приводящий в движение как коленный, так и голеностопный суставы. В протезе используется квазипассивный коленный ортез с пружинной муфтой, приближающийся к изометрическому поведению биологической икроножной мышцы. Два участника с односторонней транстибиальной ампутацией ходят с протезом на беговой дорожке с инструментами, в то время как данные о движении, силе, электромиографии и метаболических данных собираются и анализируются. Показано, что биартикулярная система снижает импульс момента колена и бедра на пораженной стороне и положительную механическую работу у обоих участников во время фазы сгибания колена в поздней стойке при ходьбе по сравнению с моноартикулярным состоянием. Основываясь на предварительных результатах, авторы предположили, что биартикулярная функциональность может обеспечить преимущества, превосходящие даже самые современные моноартикулярные протезы.
Авторы всех статей подчеркнули как перспективы, так и проблемы, с которыми сталкивается область роботизированных протезов конечностей.