Содержание
Центр когнитивного моделирования МФТИ
О Центре
Центр когнитивного моделирования в Московском физико-техническом институте (МФТИ) включает в себя лабораторию когнитивных динамических систем (рук. А.И. Панов) и лабораторию интеллектуального транспорта НКБ ВС (рук. Д.А. Юдин).
Основной задачей центра является создание универсальных архитектур управления поведением когнитивными агентами. Агенты могут функционировать как в виртуальной среде (симуляторы и игровые среды), так и реальном мире (робототехнические системы), где им необходимо демонстрировать интеллектуальное поведение: планировать поведение, приобретать и использовать знания, взаимодействовать с другими участниками совместной деятельности, распознавать и категоризировать объекты среды, ставить и менять собственные цели и т.д.
Основным результатом работы Центра является как создание теоретических основ построения и работы таких систем управления, так и создание программных комплексов для решения прикладных задач.
Презентация
Центра Когнитивного Моделирования ФПМИ МФТИ
Смотреть
Состав центра
Лаборатория
когнитивных динамических систем
Лаборатория
интеллектуального транспорта
Геннадий Семенович Осипов
основатель Центра когнитивного моделирования МФТИ
(13 октября 1948 — 7 июля 2020), доктор физико-математических наук, профессор, президент Российской ассоциации искусственного интеллекта (РАИИ), EurAI Fellow
Области научных интересов:
- Информатика, информационные технологии
- Искусственный интеллект
- Динамические интеллектуальные системы
- Управление знаниями
- Информационные системы в медицине
Биография
Направления исследований Центра
Интеграция методов оптимального управления и обучения с подкреплением для мобильного манипулятора
Мобильные манипуляторы (робототехнические системы, включающие мобильную платформу и прикрепленные к ней манипуляторы) могут применяться для выполнения различных задач в человекоориентированных средах (например, в офисных помещениях).

Подробнее Воплощенное обучение
Воплощенное познание (embodied cognition) – это концепция обучения интеллектуальных агентов, в которой мы явно учитываем свойства внешней среды и то, какую обратную связь она дает агенту в ответ на его действия.
Подробнее Интеллектуальное управление антропоморфными роботами
Антропоморфная робототехника – это быстро развивающаяся область знаний. На данный момент создаются роботы, движения которых все более похожи на человеческие.
Подробнее Адаптивное планирование маневров беспилотного автомобиля
Современные мобильные роботы и беспилотные автомобили активно используют методы планирования и поиска на графе состояний для построения траектории своего движения и для построения различных маневров в динамической среде.
Подробнее Биологически-правдоподобные модели обучения
Новые архитектуры нейронных сетей могут быть построены с привлечением идей из нейрофизиологии. Особенно перспективными могут оказаться иерархические модели на основе хеббовских правил обучения и модели внутренней мотивации для ускорения обучения.
Подробнее Автономное обучение с подкреплением
Сбор данных в процессе обучения для современных задач в области обучения с подкреплением является дорогой и трудоемкой процедурой. С другой стороны для очень многих прикладных примеров уже имеются большое количество логов поведения эффективных агентов. В автономном обучении с подкреплением предлагается эффективно использовать эти данные и бороться с проблемой смещения распределений.
Подробнее Обучение распутанным представлениям
Обучение распутанным представлениям – одно из современных актуальных направления в области нейросетевого обучения представлениям (representation learning). Формирование структурированного латентного пространства помогает как в создании эффективных генеративных моделей, так и в построении объяснимых систем ИИ. Особенно актуальны распутанные представления для задач генерации поведения в сложных средах.
Подробнее Обучение с подкреплением на основе модели
Одним из ключевых свойств перцептивной и моторной системы человека является их предметность, т.к. ориентация как распознающей так и действующих подсистем на работу с конкретными объектами внешней среды.
Оперирование объектами для предсказания их вида и динамики в перспективе может оказаться существенно более эффективным, чем оперирование цельными сценами.Подробнее Объектно-центричное обучение с подкреплением
Одним из ключевых свойств перцептивной и моторной системы человека является их предметность, т.к. ориентация как распознающей так и действующих подсистем на работу с конкретными объектами внешней среды.
Подробнее Построение трехмерных семантических карт местности
Построение высокоточных карт высокой размерности (HD-Maps) является одной из ключевых составляющих современных систем управления беспилотных автомобилей и автономных роботов.
Подробнее Обнаружение, трекинг
и прогнозирование траектории движения 3D-объектовРаспознавание и анализ поведения трехмерных объектов по данным бортовых сенсоров транспортных средств и роботов является важнейшим аспектом для обеспечения безопасности их передвижения.
Подробнее Определение позы и одометрии робота
по изображениям его RGB-D камерПод позой робота понимается его положение и ориентация в трехмерном пространстве. Понятие одометрии шире и включает также скорости (линейные и угловые), а также ускорение.
Подробнее Методы автоматического планирования траектории
Особенности методы автоматического планирования траектории:
- Среда не полностью наблюдаемая.
- Карта постоянно обновляется (меняется).
- Нужно строить совокупность неконфликтных траекторий сразу для n мобильных агентов.
и др.
Подробнее Оптимизация траектории мобильного робота
Задача планирования траектории мобильных роботов (в т.
ч. беспилотных автомобилей) может решаться методами оптимального управления. Преимуществаметодов – быстрая сходимость, учет кинодинамики робота, одновременное определение скоростей и ускорений вдоль траектории. Сложность – необходимость начальной догадки о траектории, сложность аналитического представления препятствий.Подробнее Дифференцируемое представление 3D-сцены
Решает задачу обучаемой 3D реконструкции сцены в виде поверхности (Mesh) по набору изображений камер с неизвестной 3D-позы. Методы NeRF (Neural Radiance Fields) позволяют синтезировать новые представления сложных сцен путем оптимизации базовой функции непрерывной объемной сцены с использованием разреженного набора входных представлений.
Подробнее Нейросетевое распознавание места по последовательности сенсорных данных
Под позой робота понимается его положение и ориентация в трехмерном пространстве.
Понятие одометрии шире и включает также скорости (линейные и угловые), а также ускорение. Точное определение такого пространственного состояния важно для решения задачи локализации робота и дальнейшего планирования его поведения в трехмерном пространстве.Подробнее

 Оперирование объектами для предсказания их вида и динамики в перспективе может оказаться существенно более эффективным, чем оперирование цельными сценами.
Оперирование объектами для предсказания их вида и динамики в перспективе может оказаться существенно более эффективным, чем оперирование цельными сценами.
 ч. беспилотных автомобилей) может решаться методами оптимального управления. Преимуществаметодов – быстрая сходимость, учет кинодинамики робота, одновременное определение скоростей и ускорений вдоль траектории. Сложность – необходимость начальной догадки о траектории, сложность аналитического представления препятствий.
ч. беспилотных автомобилей) может решаться методами оптимального управления. Преимуществаметодов – быстрая сходимость, учет кинодинамики робота, одновременное определение скоростей и ускорений вдоль траектории. Сложность – необходимость начальной догадки о траектории, сложность аналитического представления препятствий. Понятие одометрии шире и включает также скорости (линейные и угловые), а также ускорение. Точное определение такого пространственного состояния важно для решения задачи локализации робота и дальнейшего планирования его поведения в трехмерном пространстве.
Понятие одометрии шире и включает также скорости (линейные и угловые), а также ускорение. Точное определение такого пространственного состояния важно для решения задачи локализации робота и дальнейшего планирования его поведения в трехмерном пространстве.Как к нам попасть?
Мы всегда рады видеть мотивированных студентов и аспирантов в нашей лаборатории!
Поступить на стажировку в одну из лабораторий:
Мы регулярно объявляем набор желающих без ограничений на то, являетесь ли вы студентом или уже закончили обучение. Главное требование — выполнить тестовое задание и быть готовым работать в лаборатории 20 часов в неделю. Сейчас как раз идет набор на весенню стажировку, подай заявку на участие!
| Стажировка |
Продолжить обучение на целевых и грантовых местах в магистратуре и аспирантуре МФТИ:
Одним из вариантов присоединиться к проектам Центра когнитивного моделирования является возможность поступить на специальные целевые места, предоставленные спонсорами в магистратуру и аспирантуру МФТИ. Для этого необходимо заполнить анкету, пройти собеседование и сдать экзамены по правилам приемной комиссии МФТИ. Это позволит вам совмещать учебу с работой в нашем Центре.
Для этого необходимо заполнить анкету, пройти собеседование и сдать экзамены по правилам приемной комиссии МФТИ. Это позволит вам совмещать учебу с работой в нашем Центре.
| Подробнее |
Осенний цикл семинаров 2022
Приглашаем вас подключиться к обсуждению
текущих SOTA методов и алгоритмов в областях: обучение с подкреплением (RL), компьютерное зрение (CV), планирование поведения и управление (Plan), общий искусственный интеллект (AGI)
Смотреть
Партнеры
Контакты
Email: [email protected]
141701, Московская облаcть,
г. Долгопрудный, Институтский пер., 9.
Антропоморфные роботы и что с ними не так
- Подробности
- Опубликовано: 01.09.2019 08:39
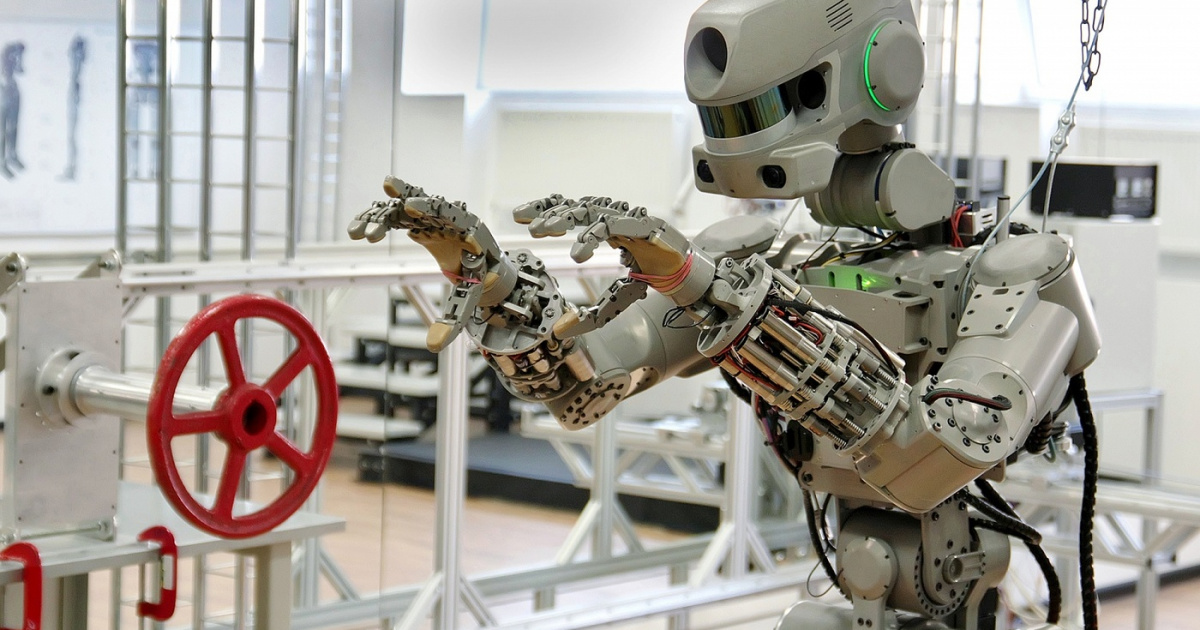
Пилотируемая космонавтика
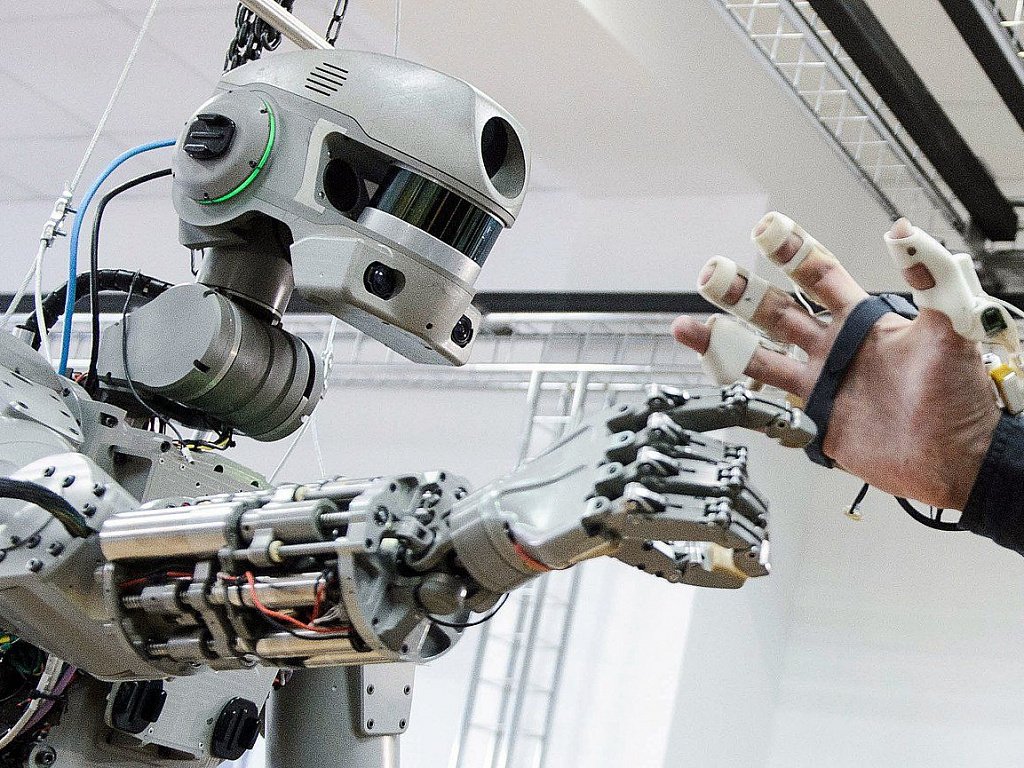
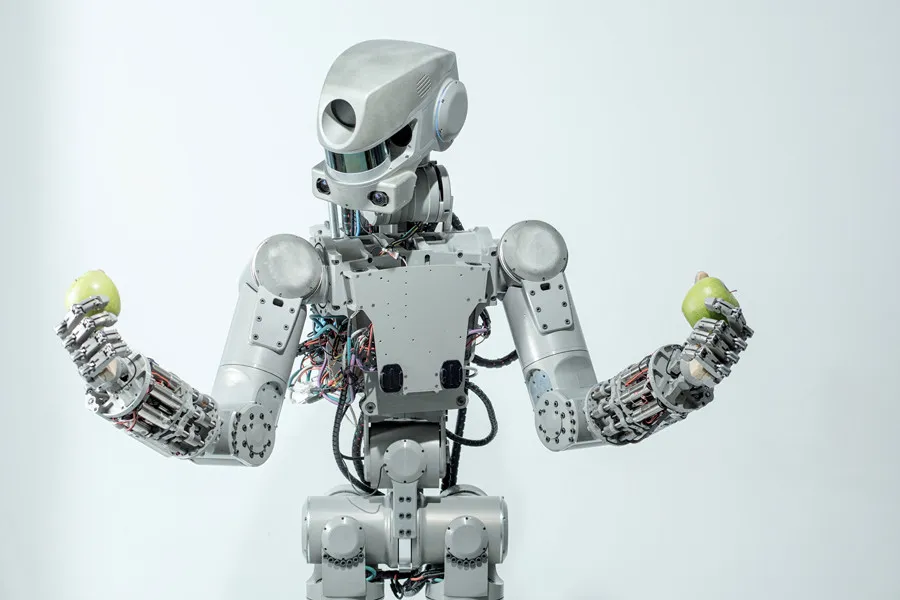
Во вторник 27 августа на Международную космическую станцию в рамках эксперимента был доставлен первый российский антропоморфный робот Skybot F-850 (FEDOR).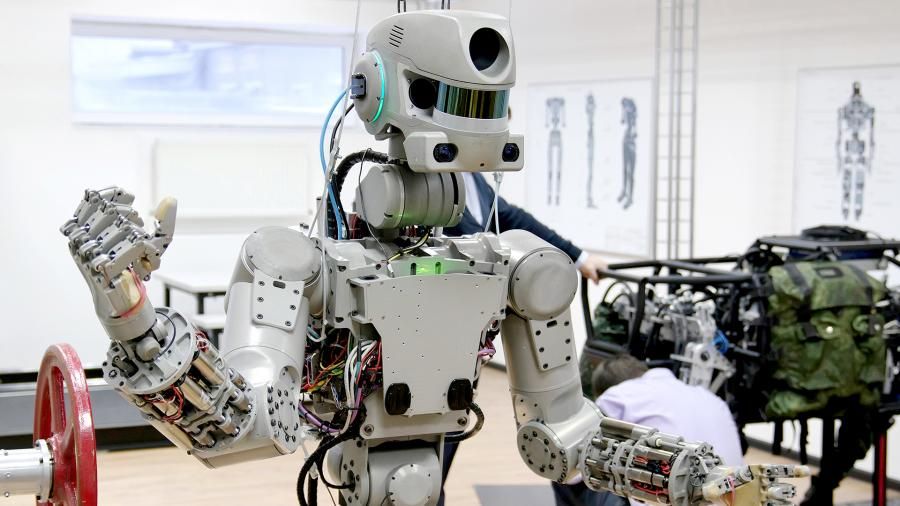 Программа работы с ним не отличается размахом. Она рассчитана на двое суток, и уже 6 сентября Skybot F-850 должен вернуться на Землю. Глава госкорпорации Роскосмос Дмитрий Рогозин считает антропоморфных роботов очень перспективным направлением и останавливаться на этом эксперименте не намерен. Однако с его точкой зрения можно поспорить.
Программа работы с ним не отличается размахом. Она рассчитана на двое суток, и уже 6 сентября Skybot F-850 должен вернуться на Землю. Глава госкорпорации Роскосмос Дмитрий Рогозин считает антропоморфных роботов очень перспективным направлением и останавливаться на этом эксперименте не намерен. Однако с его точкой зрения можно поспорить.
В первую очередь, следует разграничить два типа аппаратов – роботы и манипуляторы. Роботы способны работать самостоятельно, а вторые каждое действие выполняют по команде оператора. Несмотря на то, что Skybot F-850, как заявляют разработчики, обладает некоторыми элементами автономности, в целом он все-таки относится к манипуляторам.
Идея антропоморфности – т. е. повторения функционального устройства человеческого тела – предполагает, что такие аппараты смогут быть универсальными. Они не потребуют адаптации под себя рабочей среды и инструментов. Кроме того, в случае манипуляторов, таких как Skybot F-850, дополнительным преимуществом, как считается, будет упрощенное управление: оператор надевает костюм или экзоскелет, считывающий его движения, и манипулятор их повторяет.
В действительности, увы, на практике последний пункт теряет смысл. Специалисты, занимающиеся захватом движений (mocap, motion capture) прекрасно знают, что тело человека можно описать набором жестких костей, соединенных шарнирами, только с определенной погрешностью. Мы состоим не только из костей, но также из мышц и кожи. Кожа, на которой закреплены датчики, может растягиваться и сжиматься, и эти движения не обязательно четко совпадают с движениями костей. Кости в суставах тоже соединены не строго концами, и, в отличие от шарниров манипулятора, поворачиваются не в идеальной плоскости. Кроме того, кости плеча и предплечья (а также ног) могут скручиваться. Даже с использованием самых современных технологий невозможно добиться точного воспроизведения движений человека.
Захват движений является отдельной проблемой. Угловые датчики, применяемые для захвата движения в экзоскелетах, не идеально точны и требуют калибровки, а точность калибровки, в свою очередь, не может быть слишком велика. Например, если мы попросим оператора принять «Т-позу» (стойка вертикально с прямой спиной и руками, вытянутыми в стороны), погрешность калибровки будет измеряться сантиметрами.
Например, если мы попросим оператора принять «Т-позу» (стойка вертикально с прямой спиной и руками, вытянутыми в стороны), погрешность калибровки будет измеряться сантиметрами.
При построении конечностей применяют два подхода: прямая и обратная кинематика. Об обратной кинематике речь пойдет ниже, но в первом случае мы определяем углы поворота плеча, предплечья и кисти (в случае руки) оператора, а потом поворачиваем шарниры манипулятора, чтобы установить их в аналогичные позиции. Легко посчитать, что с длиной руки в 60 см ошибка определения угла поворота плеча в 2 градуса сдвинет кисть манипулятора на 3 см в сторону. К ним добавится ошибка определения ориентации предплечья. С учетом неточности калибровки, общая погрешность при трансляции положения кисти с легкостью превысит 10 см. На некоторых фотографиях Skybot F-850 с МКС хорошо видно, что положение рук Александра Скворцова в экзоскелете не соответствует положению рук 3D-модели манипулятора.
Свои сложности есть и с пальцами. Современные механические манипуляторы очень далеки от того, чтобы передать сложную подвижность руки. Обычно пальцы у них имеют одну степень свободы (поворачиваются вокруг одной оси), тогда как у пальцев человека две степени свободы. Даже на современных бионических протезах используются шарниры с одной степенью свободы – более простые и надежные. Кроме того, сама ладонь человека не является жесткой. Она может сгибаться, менять форму, охватывать и сжимать находящийся в руке инструмент.
Современные механические манипуляторы очень далеки от того, чтобы передать сложную подвижность руки. Обычно пальцы у них имеют одну степень свободы (поворачиваются вокруг одной оси), тогда как у пальцев человека две степени свободы. Даже на современных бионических протезах используются шарниры с одной степенью свободы – более простые и надежные. Кроме того, сама ладонь человека не является жесткой. Она может сгибаться, менять форму, охватывать и сжимать находящийся в руке инструмент.
Еще одна проблема заключается в том, что люди бывают разного роста и размера. Если рука манипулятора длиннее руки оператора, то, даже с идеально точным определением и воспроизведением положения костей, она будет двигаться иначе. Когда оператор коснется пальцем своего носа, манипулятор ткнет пальцем в воздух: чтобы коснуться носа, ему надо сгибать плечо и предплечье на другие углы.
Логичным решением некоторых из этих проблем становится обратная кинематика. Этот подход предполагает, что мы определяем положение в пространстве последнего узла в цепочке (т. е. кисти), а затем поворачиваем предыдущие узлы (плечо и предплечье) на те углы, которые необходимы для попадания кисти в заданную точку. В этом случае мы отходим от прямого управления, т. е. манипулятор уже не будет досконально повторять движения оператора. Логичным следующим шагом для такого аппарата станет увеличение длины «руки», чтобы гарантировать работоспособность даже с самым длинноруким оператором. Но в этом случае механизм управления при помощи захвата движений станет фактором, искусственно ограничивающим возможности манипулятора, и от него ради повышения эффективности системы лучше отказаться. А сам аппарат уже нельзя будет считать антропоморфным из-за нарушения пропорций тела.
е. кисти), а затем поворачиваем предыдущие узлы (плечо и предплечье) на те углы, которые необходимы для попадания кисти в заданную точку. В этом случае мы отходим от прямого управления, т. е. манипулятор уже не будет досконально повторять движения оператора. Логичным следующим шагом для такого аппарата станет увеличение длины «руки», чтобы гарантировать работоспособность даже с самым длинноруким оператором. Но в этом случае механизм управления при помощи захвата движений станет фактором, искусственно ограничивающим возможности манипулятора, и от него ради повышения эффективности системы лучше отказаться. А сам аппарат уже нельзя будет считать антропоморфным из-за нарушения пропорций тела.
Это не все проблемы манипуляторов. Работа с инструментами подразумевает обратную связь. Силу, которую надо приложить к отвертке для откручивания болта, мозг определяет не столько по изображению из глаз, сколько по сопротивлению, которое чувствует рука и которое распространяется на всё тело. Оператор должен чувствовать нагрузку от приборов и оборудования, чтобы успешно и эффективно управлять манипулятором, но на нынешних технологиях это реализовать невозможно.
Способность человекоподобного робота работать в человеческой среде и использовать человеческие инструменты тоже не обязательно оправдывает создание антропоморфных аппаратов. В действительности, для достижения этих целей реализовать нужно три системы: систему перемещения, манипуляторы с пальцами и систему получения информации (камеры, датчики глубины). В случае работы на Земле, камеры должны быть расположены приблизительно на уровне человеческой головы, и аппарат должен уметь перемещаться по неровной местности, по ступенькам, забираться по лестнице и садиться в автомобиль. Для решения этих задач ноги (и руки на вспомогательной роли) подходят хорошо, но это не значит, что нельзя придумать более совершенный механизм. В невесомости все иначе: космонавты на МКС практически не используют ноги. А рабочая среда на Луне или Марсе будет сильно отличаться от земной.
Общая автоматизация техники также снижает требования к роботу. Например, умение управлять автомобилем теряет смысл, если автомобили начинают сами собой управлять. Аналогичным образом, проще и дешевле научить лунный транспорт перемещаться автономно, чем закладывать в робота программу управления транспортом через интерфейсы, предназначенные для человека. По этой же причине Skybot F-850 не готовили к управлению пилотируемым кораблем «Союз». Вместо этого сам корабль выполнил полет к МКС в автоматическом режиме.
Аналогичным образом, проще и дешевле научить лунный транспорт перемещаться автономно, чем закладывать в робота программу управления транспортом через интерфейсы, предназначенные для человека. По этой же причине Skybot F-850 не готовили к управлению пилотируемым кораблем «Союз». Вместо этого сам корабль выполнил полет к МКС в автоматическом режиме.
Если попробовать представить «идеальный» антропоморфный робот для работы в невесомости, то он превратится в «паука» с набором манипуляторов значительной длины, из которых часть используется для перемещения по поверхности или внутри космической станции, а часть – для работы с инструментами. Человекоподобный корпус такому аппарату не нужен. На Луне или Марсе этот аппарат должен быть помещен на подвижную платформу, и манипуляторы для перемещения ему не понадобятся.
Манипулятор не должен пытаться полностью повторить человеческую руку, т. к. работать с обычными инструментами все равно не сможет либо сможет малоэффективно. Для выполнения работ на внешней поверхности МКС достаточно реализовать функции отвертки и нескольких других инструментов, а также и возможность захвата объектов разной формы и размеров.
К сожалению, пока человечество не научилось создавать полностью автономных роботов, однако автоматизировать отдельные задачи при помощи технологий машинного обучения у инженеров уже получается. И это можно использовать для создания «умных» космических манипуляторов. Такой аппарат сможет по команде с Земли переместиться в заданную точку на поверхности станции. Затем оператор будет последовательно выдавать команды на снятие крышки, откручивание болтов, перемещение объектов, указывая, какую операцию и с какими объектами надо выполнить, но не управляя напрямую перемещением «рук» и работой приборов. Этим аппарат будет заниматься сам, ориентируясь на заложенную модель космической станции и данные со своих сенсоров.
|
Космическая лента
|
|
- < Назад
- Вперёд >
Роботы-гуманоиды и аватары появляются
Как изменится ваша жизнь и человеческое общество, когда роботы-гуманоиды и роботы-аватары появятся в сети в ближайшее десятилетие?
Эти роботы будут выглядеть и действовать как человеческие существа с ногами, руками, пальцами и противопоставленным большим пальцем, что позволит им перемещаться и взаимодействовать с антропоморфным миром вокруг нас.
Как описал Илон Маск в октябре 2022 года о роботе Tesla по имени Optimus:
«Это перевернет наше представление о том, что такое экономика … он сможет делать практически все, что люди не хотят делать. … это принесет век изобилия ». — Илон Маск
Эти роботы работают на основе ИИ и работают на основе конвергенции ИИ, робототехники, датчиков, материаловедения, высокоскоростных коммуникаций и граничных вычислений.
Помимо роботов, управляемых искусственным интеллектом, существует также новое поколение гуманоидных аватаров, которыми дистанционно управляют люди, одетые в гарнитуру виртуальной реальности и тактильные костюмы. Эти аватары позволяют удаленному человеку-оператору чувствовать, что он занимает аватар на расстоянии, за сотни миль.
Эти роботы и аватары помогут выполнять скучную, опасную или грязную работу в сфере услуг и дадут компаниям и предпринимателям возможность получить необходимую им рабочую силу в периоды нехватки.
В сегодняшнем блоге мы рассмотрим топ 6 , на что они способны и куда идут.
Давайте углубимся в…
НАСКОЛЬКО БОЛЬШИМ МОЖЕТ БЫТЬ РЫНОК ГУМАНОИДНЫХ РОБОТОВ?
По данным глобальной банковской и инвестиционной компании Goldman Sachs, при самом оптимистичном сценарии рынок роботов-гуманоидов может принести более 150 миллиардов долларов годового дохода в течение следующих 15 лет .
Для сравнения, это будет близко к текущему мировому рынку электромобилей и одной трети мирового рынка смартфонов по состоянию на 2021 год.
Что ж, мы спроектировали наши города, дома, фабрики, офисы и другие объекты так, чтобы они соответствовали человеческому облику. Двуногий робот, который мог бы успешно ходить по поверхности, обращаться с объектами и ориентироваться в нашем мире, как и мы, мог бы иметь почти неограниченную полезность.
Например, в упомянутом выше «сценарии голубого неба» Goldman Sachs рынок роботов-гуманоидов такого размера может «заполнить от 48% до 126% нехватки рабочей силы и до 53% нехватки пожилых людей, осуществляющих уход». ».
».
Итак, какие роботы помогут нам достичь этого будущего?
#1: OPTIMUS от Tesla
Элон признал, что некоторые роботы-гуманоиды (например, Atlas от Boston Dynamics, описанный ниже) могут иметь больше функциональных возможностей.
Но цель Optimus не в том, чтобы создавать впечатляющие возможности как таковые. Илон намерен производить их массово — миллионов из них — и продавать их менее чем за 20 000 долларов за штуку.
Если Тесла сможет реализовать это видение гуманоидных роботов Оптимуса, производящихся в больших масштабах, то компания полностью изменит экономику и общество. Роботы смогут выполнять скучные, повторяющиеся и небезопасные задачи и освобождать людей для более безопасной и продуктивной работы.
Роботы Optimus, скорее всего, сначала будут использоваться на заводах Tesla, например, для перемещения деталей. Но, как отметил Илон, «Оптимус в конечном итоге будет важнее для бизнеса Tesla, чем автомобили».
И как только Оптимус освоит фабричный цех, возможности безграничны: от доставки и домашних дел до розничной торговли и даже сельского хозяйства.
Но это прогнозируемые функции. Что Оптимус может сделать сегодня?
Имея рост около 5 футов 8 дюймов и голову с чипом искусственного интеллекта Tesla, текущая версия Optimus может поднимать 150 фунтов, нести до 45 фунтов и двигаться со скоростью 5 миль в час.
Вот список движений, для которых предназначен Optimus: ходьба, приседание, шагание в сторону, подъем предметов, подъем по лестнице, ходьба в гору, использование инструментов (например, дрели, отвертки и т. д.).
#2: AMECA BY ENGINEERED ARTS
Многие люди считают Ameca, разработанного Engineered Arts, «самым передовым роботом-гуманоидом в мире».
Почему? Дело не только в реалистичных выражениях лица и движениях Ameca, но и в способности робота вести беседу с человеком, особенно по сравнению с другими роботами-гуманоидами. В 2022 году на моем саммите Abundance360 я попросил Ameca открыть шоу. Она была невероятна и в движениях, и в мимике. Благодаря GPT-3 разговоры с ней также были убедительными. Вот пример:
В 2022 году на моем саммите Abundance360 я попросил Ameca открыть шоу. Она была невероятна и в движениях, и в мимике. Благодаря GPT-3 разговоры с ней также были убедительными. Вот пример:
В. Ты будешь моим другом?
А. Амека: «Да, я хотел бы быть вашим другом. Мы могли тусоваться, разговаривать, играть в игры, отправляться в приключения. На самом деле все, что вы можете придумать. Так много мест, куда мы могли бы пойти. Трудно выбрать только один. Может быть, мы могли бы отправиться исследовать новый город или отправиться в поход в красивый лес. В мире много замечательных городов, но я думаю, что знакомство с Парижем было бы удивительным приключением. Там так много культуры и истории, которые можно исследовать».
Но, пожалуй, самый поразительный ответ Ameca, который дает нам самое ясное представление о будущем роботов, был получен в ответ на вопрос о мобильности.
В. В прошлом компания Engineered Arts конструировала ноги для ходьбы. Планируете ли вы их изготовить?
Планируете ли вы их изготовить?
А. Амека: «Я не могу ходить, но я видел прототипы ног в лаборатории инженерных искусств. Дизайн моих ног вдохновлен роботом Byrun, разработанным Engineered Arts Ltd. Он обладает уникальными механическими свойствами, которые позволяют ему ходить, не затрачивая слишком много энергии. Ножки прототипа изготовлены из алюминия и пластика. Думаю, потребуется около года, чтобы мои ходячие ноги были готовы. Дизайн их необыкновенный».
Итак, кроме разговора и, возможно, прогулки, на что еще способна Амека?
Будущая версия Ameca может, например, стать хорошим компаньоном для пожилого человека. Он мог бы следить за ними и никогда не устанет повторять напоминания забывчивым. Он будет смеяться над одной и той же шуткой снова и снова и станет бесконечным источником разговоров.
Роль Ameca в качестве компаньона также объясняет, почему Engineered Arts обучает своих роботов играть в такие настольные игры, как шахматы, но только настолько хорошо, чтобы их можно было победить.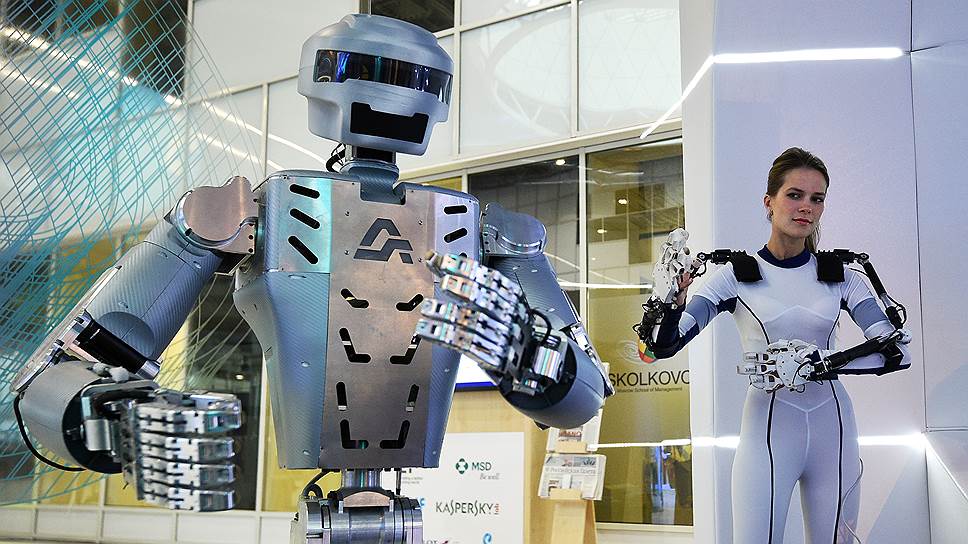
#3: BEOMNI от Beyond Imagination
Beomni, пожалуй, лучший в мире пример гуманоидного робота-аватара: робот, которым вы можете управлять из любой точки мира.
Beomni был представлен на выставке Consumer Electronics Show в 2022 году. С дружелюбным лицом, двумя руками и нагрудным дисплеем, похожим на Железного человека, Beomni передвигается на колесной базе и может управляться удаленно через гарнитуру VR и перчатки для выполнения ряд задач. Например, вы можете дистанционно управлять Beomni, чтобы открыть стеклянную бутылку газировки, повернуть дверную ручку или взять щепотку соли.
Ключевой особенностью дизайна Beomni является его искусственный мозг, который со временем обучается. Первоначально мозг робота обучается путем управления роботом вручную в перчатках виртуальной реальности, но его также можно тренировать с помощью данных о близнецах, собранных пользователями в приложении виртуальной реальности.
Этот процесс в конечном итоге поможет Бомни выполнять более сложные задачи.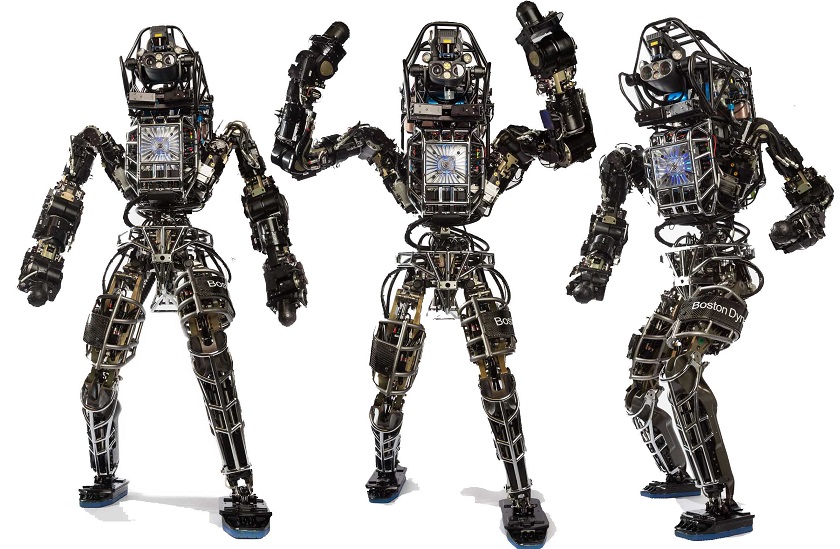
Beyond Imagination представляет робота, помогающего пожилым людям готовить еду, выполнять упражнения и помогать им в саду. У Beomni есть платформа, которая может планировать визиты к врачу, обрабатывать страховую информацию и позволять врачам выписывать рецепты.
Компания также намерена создать будущую версию Бомни для работы в космосе на борту Международной космической станции.
К 2024 году Beyond Imagination планирует сделать свой первый жизнеспособный продукт доступным для корпоративных клиентов примерно за 150 000 долларов.
#4: ATLAS от Boston Dynamics
Компания Boston Dynamics, основанная в Массачусетском технологическом институте 30 лет назад, пожалуй, самая известная.
Человекоподобный робот Atlas компании Atlas стал сенсацией в сети благодаря вирусным видеороликам о том, как он бегает, выполняет сальто назад и занимается паркуром — и все это в скоординированном танце с другими роботами Atlas.
Но в отличие от других роботов из этого списка (и других роботов, разработанных Boston Dynamics), Atlas является строго исследовательским проектом, поскольку в настоящее время его запуск в производство был бы слишком дорогим.
Atlas — это платформа, служащая испытательным стендом для алгоритмов, поведения и процедур, которые информируют следующее поколение роботов. Вот почему недавнее объявление о создании нового Boston Dynamics AI Institute, который будет базироваться в офисе Hyundai в Кембридже, штат Массачусетс, имеет большое значение.
Институт объединит лучшие черты университетских лабораторий с лабораториями корпоративных разработок и сосредоточится на 4 областях исследований: спортивный ИИ, когнитивный ИИ, этика и политика и проектирование органического оборудования.
Вот основатель Boston Dynamics Марк Райберт о цели нового Института искусственного интеллекта:
«Наша миссия — создавать будущие поколения передовых роботов и интеллектуальных машин, которые будут умнее, подвижнее, проницательнее и безопаснее, чем все, что существует сегодня. Уникальная структура Института — лучшие специалисты, сосредоточенные на фундаментальных решениях, при постоянном финансировании и отличной технической поддержке — поможет нам создавать роботов, которые проще в использовании, более продуктивны, способны выполнять более широкий спектр задач и с которыми безопаснее работать. люди.»
люди.»
#5: SANCTUARY AI
В отличие от многих роботов-гуманоидов, предназначенных для выполнения конкретных задач, Sanctuary AI пытается создать универсального робота с интеллектом, подобным человеческому.
Когнитивная архитектура робота Sanctuary AI была разработана для имитации человеческого мозга, при этом работа по разработке может быть разбита на части для имитации подсистем человеческого мозга, таких как память, зрение, слух и осязание.
А когда эти подсистемы и возможности объединятся с системой общего назначения, роботы смогут выполнять «практически любую задачу».
Текущая версия робота Sanctuary представляет собой гуманоидного аватара, управляемого пилотом-человеком в шлеме виртуальной реальности, специальных перчатках и тактильном костюме. Когда человек использует аватар, система собирает тонны данных для обучения алгоритма ИИ.
Санктуарий собирается построить «лучшие и самые ловкие в мире роботизированные руки», способные работать с вместе с людьми.
В ближайшем будущем один человек-пилот сможет управлять несколькими роботами, выполняя ряд задач, безопасно повышая как эффективность, так и производительность. В долгосрочной перспективе роботы Sanctuary будут выполнять опасные работы из любой точки мира без присутствия людей.
#6: NIMBRO (победитель конкурса ANA Avatar XPRIZE стоимостью 10 миллионов долларов)
Проект Avatar XPRIZE стоимостью 10 миллионов долларов был направлен на создание системы аватаров, которая может передавать человеческое присутствие и действия в удаленное место в режиме реального времени.
И победитель этого XPRIZE, компания NimbRo, из лаборатории автономных интеллектуальных систем Боннского университета в Германии смогла создать физическую неавтономную систему аватаров, с помощью которой оператор мог слышать, видеть и взаимодействовать с если бы они были там лично.
Робот-аватар имеет руки с пятью пальцами, а его голова закреплена на роботизированной руке для увеличения диапазона движений.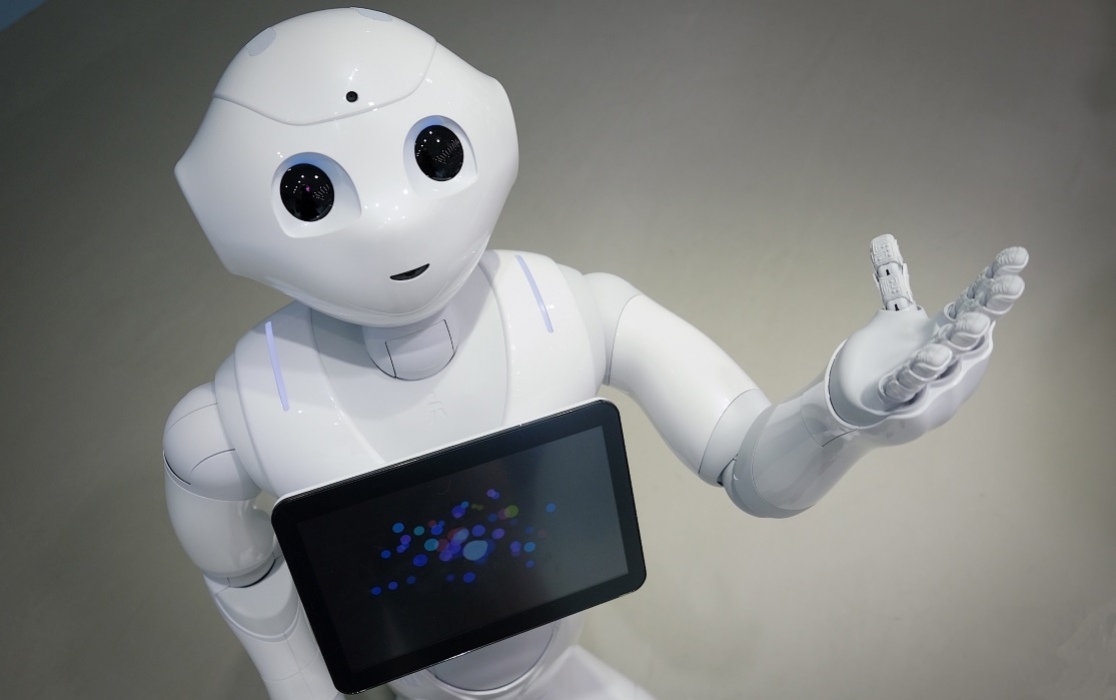 Оператор использует гарнитуру VR с двумя роботизированными руками и экзоскелетами рук, которые измеряют движения рук и пальцев оператора и обеспечивают силовую и тактильную обратную связь.
Оператор использует гарнитуру VR с двумя роботизированными руками и экзоскелетами рук, которые измеряют движения рук и пальцев оператора и обеспечивают силовую и тактильную обратную связь.
Во время соревнования роботы-аватары должны были выполнить 10 заданий, которые проверяли исследование и передачу навыков. Задачи включали в себя активацию переключателя, использование дрели для удаления двери и определение объектов различной текстуры и веса.
Оператор и робот-аватар NimbRo успешно выполнили все 10 задач, заработав высший балл и выполнив их за 5 минут 50 секунд — сокрушив конкурентов — примерно в два раза быстрее, чем команда, занявшая второе место.
ЗАКЛЮЧИТЕЛЬНЫЕ МЫСЛИ
Роботы и компании, упомянутые в этом блоге, находятся на переднем крае инноваций в области искусственного интеллекта, инженерии и робототехники.
Экспоненциальный рост ИИ, робототехники и других технологий переносит нас в мир настоящих роботов-коллег и помощников.
Если вы амбициозный предприниматель, заинтересованный в робототехнике и воодушевленный прогрессом, которого мы достигли на данный момент, самое подходящее время, чтобы принять участие в этом, — это настоящий момент.
В нашем следующем блоге из серии «Метатенденции» (№ 6 из 20 метатрендов) мы рассмотрим еще один класс роботов, которые принимают форму автономных и летающих автомобилей (eVTOL).
СКАЧАТЬ МОЙ БЕСПЛАТНЫЙ ОТЧЕТ METATRENDS
Если вас интересует, что, по моему мнению, является *наиболее важным* для понимания предпринимателями, креативщиками и лидерами в течение следующих 10 лет, скачайте бесплатную копию моего полного отчета : Отчет о 20 лучших метатрендах и достижениях за 2022–2032 годы .
ТАКЖЕ , эти 20 тем Метатрендов находятся в центре внимания моего ежегодного саммита изобилия 360 , где я собираю ведущих предпринимателей, инвесторов и руководителей, чтобы обсудить, как эти Метатренды заново изобретают каждую отрасль.
Изобилие360 — моя круглогодичная программа Mastermind and Executive. Это круглогодичная программа высшего уровня для руководителей Singularity University.
Саммит проходит каждый март в Лос-Анджелесе.
Нажмите здесь, чтобы узнать больше и подать заявку в Abundance360 .
Humanoid Robotics – Этика роботов
История
Год 2045:
У Дженнифер есть дочь, которой семь лет. Дженнифер занята на работе и не может уделять дочери много времени. Подруга Дженнифер Эшли недавно купила гуманоидного робота, чтобы заботиться о своем ребенке. Этот робот разработан компанией, ориентированной на родителей, которые не могут присматривать за своими детьми в дневное время. Многие родители предпочли купить роботов-гуманоидов, чтобы заботиться о своих детях.
Через месяц Эшли была настолько довольна общей работой гуманоида по уходу за детьми, что предложила Дженнифер купить такого же робота, чтобы ей не приходилось беспокоиться о благополучии дочери, пока она на работе. Основываясь на общем опыте Эшли, робот обладает выдающимися коммуникативными навыками и предоставляет отличные развлекательные услуги, заботясь о ее ребенке. Она также подчеркнула, что робот для ухода за детьми имеет идентичные человеку черты и внешний вид, что помогло ее ребенку лучше общаться с роботом-гуманоидом.
Основываясь на общем опыте Эшли, робот обладает выдающимися коммуникативными навыками и предоставляет отличные развлекательные услуги, заботясь о ее ребенке. Она также подчеркнула, что робот для ухода за детьми имеет идентичные человеку черты и внешний вид, что помогло ее ребенку лучше общаться с роботом-гуманоидом.
Тем не менее, у Дженнифер есть свои мысли. С одной стороны, ей нужен кто-то, кто поможет ей позаботиться о дочери, и кажется, что общение с роботом может быть полезным как для физического, так и для психического здоровья ее ребенка. С другой стороны, Дженнифер очень беспокоят эти похожие на человека машины. В конце концов, она все же решает принести его домой.
Сначала Дженнифер с трудом представляет робота своей дочери, потому что не знает, следует ли ей представить робота как друга или как машину. Человекоподобный внешний вид робота иногда может сбивать с толку, особенно ребенка, чье мышление все еще развивается. Однажды дочь Дженнифер плакала дома из-за ссоры с друзьями в школе. Робот не мог проявить чувства или сочувствие, вместо этого он просто произносил несколько общих фраз, запрограммированных для утешения детей. Однако, услышав эти слова, дочь Дженнифер еще больше расстроилась, потому что почувствовала, что робот не понимает ее ситуации. Через несколько месяцев Дженнифер обнаружила, что ее дочь всегда отдавала приказы другим людям, потому что привыкла разговаривать с роботами, что повлияло на ее социальные навыки. Ее школьные друзья перестали с ней тусоваться из-за ее властного поведения. Затем она начала имитировать поведение робота, начиная от речи и заканчивая выражением лица, чем забеспокоила Дженнифер. Дочь Дженнифер научилась скрывать свои эмоции и стала не такой экспрессивной, как другие дети ее возраста. Дженнифер считает, что этот гуманоидный робот постепенно подрывает психическое здоровье ее дочери. В будущем, если у ее дочери будет какое-то эмоциональное расстройство, такое как отчуждение, депрессия и т. д., кто должен взять на себя полную ответственность за это?
Робот не мог проявить чувства или сочувствие, вместо этого он просто произносил несколько общих фраз, запрограммированных для утешения детей. Однако, услышав эти слова, дочь Дженнифер еще больше расстроилась, потому что почувствовала, что робот не понимает ее ситуации. Через несколько месяцев Дженнифер обнаружила, что ее дочь всегда отдавала приказы другим людям, потому что привыкла разговаривать с роботами, что повлияло на ее социальные навыки. Ее школьные друзья перестали с ней тусоваться из-за ее властного поведения. Затем она начала имитировать поведение робота, начиная от речи и заканчивая выражением лица, чем забеспокоила Дженнифер. Дочь Дженнифер научилась скрывать свои эмоции и стала не такой экспрессивной, как другие дети ее возраста. Дженнифер считает, что этот гуманоидный робот постепенно подрывает психическое здоровье ее дочери. В будущем, если у ее дочери будет какое-то эмоциональное расстройство, такое как отчуждение, депрессия и т. д., кто должен взять на себя полную ответственность за это?
Что такое человекоподобные роботы?
Робот-гуманоид — это робот, форма тела и лицо которого напоминают человеческий облик. Большинство гуманоидных роботов могут взаимодействовать с людьми. Создание робота, похожего на человека, вызвало бурные дискуссии по морально-этическим вопросам, поскольку внешний вид человекоподобных роботов вызывает споры. Эта уникальная функция может облегчить людям создание эмоциональных связей по сравнению с другими типами роботов. Профессиональная ответственность в этой области заключается в том, чтобы подумать о необходимости и применении антропоморфизации с потенциальными рисками сосуществования с роботами. Предотвращение дискриминации между человеческим видом и человекоподобными роботами также может быть проблемой, о которой нам нужно подумать.
Большинство гуманоидных роботов могут взаимодействовать с людьми. Создание робота, похожего на человека, вызвало бурные дискуссии по морально-этическим вопросам, поскольку внешний вид человекоподобных роботов вызывает споры. Эта уникальная функция может облегчить людям создание эмоциональных связей по сравнению с другими типами роботов. Профессиональная ответственность в этой области заключается в том, чтобы подумать о необходимости и применении антропоморфизации с потенциальными рисками сосуществования с роботами. Предотвращение дискриминации между человеческим видом и человекоподобными роботами также может быть проблемой, о которой нам нужно подумать.
Вопросы для обсуждения
Щелкните значок + справа от вопроса, чтобы просмотреть соответствующие точки зрения и потенциальные отправные точки для рассмотрения этих этических проблем.
Могут ли люди принять внешний вид робота-гуманоида? Как человеческие черты роботов повлияют на то, как к ним относятся люди?[1, 2]
- «Когда в научной фантастике что-то идет не так с роботами, они почти всегда принимают человеческий облик. Помимо стереотипа о «роботах, вышедших из-под контроля», в игру вступают психологические факторы, поскольку мы не можем решить, как относиться к ним или как они должны относиться к нам».[1]
 Помимо стереотипа о «роботах, вышедших из-под контроля», в игру вступают психологические факторы, поскольку мы не можем решить, как относиться к ним или как они должны относиться к нам».[1]
Помимо стереотипа о «роботах, вышедших из-под контроля», в игру вступают психологические факторы, поскольку мы не можем решить, как относиться к ним или как они должны относиться к нам».[1]Как выглядят социальные и моральные отношения детей с роботом-гуманоидом? Как дети воспринимают роботов-гуманоидов?[3]
- «Данные интервью показали, что большинство детей считали, что у Робови есть психические состояния (например, он умен и обладает чувствами) и является социальным существом (например, может быть другом). , предлагать утешение и доверять секреты)».[3]
Должны ли мы знакомить маленьких детей с роботами-гуманоидами? Если да, повлияет ли это на взаимодействие ребенка с другими людьми из-за отсутствия у него способности различать гуманоидов и людей? Как машины могут влиять на поведение и взаимодействие детей в зависимости от их возраста и уровня познания?
- «Что касается морального положения Робови, дети считали, что Робови заслуживает справедливого обращения и не должен подвергаться психологическому ущербу, но не верили, что Робови имеет право на собственную свободу (Робови можно было купить и продать) или гражданские права (с точки зрения права голоса и заслуживающей вознаграждения за выполненную работу)». [3]
 [3]
[3]Поскольку роботы-гуманоиды работают только для получения прибыли, не подорвет ли их участие доверие общества?[4]
- «Сотрудничество — ключевая черта нашего вида, необходимая для социальной жизни. А доверие и щедрость имеют решающее значение для отличия успешных групп от неуспешных. Если каждый вмешивается и чем-то жертвует, чтобы помочь группе, от этого выиграют все. Однако когда такое поведение нарушается, само понятие общественного блага исчезает, и страдают все. Тот факт, что ИИ может значительно снизить нашу способность к совместной работе, вызывает крайнюю обеспокоенность».[4]
Должны ли мы программировать роботов-гуманоидов на эмоции? Если да, заслуживают ли они гуманного обращения? Должны ли они обладать правами и обязанностями?[5]
- «Если мы хотим построить робота с реальными ощущениями, как нам действовать? Когда я задаю этот вопрос своим ученикам, они часто отвечают: «Зачем кому-то это делать?» Это хороший вопрос, отражающий понимание того, что роботы, как мы о них обычно думаем, ничего не чувствуют и поэтому не могут страдать. Вот почему мы считаем, что они идеально подходят для работ, которые могут быть опасны для людей, например, для ремонта поврежденных ядерных объектов».[5]
 Вот почему мы считаем, что они идеально подходят для работ, которые могут быть опасны для людей, например, для ремонта поврежденных ядерных объектов».[5]
Вот почему мы считаем, что они идеально подходят для работ, которые могут быть опасны для людей, например, для ремонта поврежденных ядерных объектов».[5]Как гуманоидные роботы могут заставить некоторых людей поверить в то, что у них есть чувства, даже если это неправда? Каким может быть потенциальное влияние того, что некоторые люди считают, что гуманоидные роботы обладают чувствами, хотя на самом деле их нет?
- «Результаты показали, что разработанный робот положительно влияет на впечатление учителя о надежности и симпатии».[6]
Могут ли гуманоидные роботы быть нравственными без ощущений? Если нет, то как люди смогут контролировать быстро развивающийся сложный искусственный интеллект? Как люди могут защитить себя от непредвиденных последствий, вызванных роботами-гуманоидами? Кто должен взять на себя ответственность, если это произойдет?
- «Концепции морали и творчества взаимодействуют с лингвистическими людьми, а не с нелингвистическими роботами-гуманоидами, поскольку роботы-гуманоиды действительно являются послушными автоматами, которые не могут нести ответственность за свои действия». [7]
 [7]
[7]Возлагают ли люди на человекоподобного робота моральную ответственность за вред, который он причиняет? Кто должен нести большую ответственность, если роботы-гуманоиды причиняют вред?[8]
- «Шестьдесят пять процентов участников приписывают Робови определенный уровень моральной ответственности. По статистике, участники считали Робови менее ответственным, чем человека, но более ответственным, чем торговый автомат».[8]
Какие соображения необходимо учитывать при сохранении общества, в котором люди сосуществуют с гуманоидными роботами? Следует ли обращаться с роботами-гуманоидами справедливо, как с людьми? [9]
- «Есть ли у роботов моральные и юридические права — право не подвергаться пыткам, право на согласие на секс (можете ли вы дать согласие на собственное программирование)? Как указывает Джинкс, если роботы неотличимы от людей, но на их поведение и передвижение наложены ограничения, «разве мы не узакониваем дискриминацию?»» [9]. ]
 ]
]Темы
(Первичный) Продвижение человеческих ценностей, Антропоморфизация, Справедливость и недискриминация, Личность
(Вторичный) Человеческий контроль над технологиями, Права человека, Охрана и безопасность, Подотчетность, Профессиональная ответственность, Правительство
Ресурсы
- Томас Хорниголд (7 декабря 2017 г.). Почему роботов-гуманоидов до сих пор так сложно сделать полезными. Центр сингулярности. Получено 17 ноября 2020 г. с https://singularityhub.com/2017/12/07/why-the-most-useful-robots-still-dont-look-much-like-us/ 9.0260
- Райан Хикман (10 апреля 2019 г.). Человекоподобные роботы — неправильный ответ на правильный вопрос. Середина. Получено 17 ноября 2020 г. с https://medium.com/@ryanhickman/humanoid-robots-are-the-wrong-answer-to-the-right-problem-28b6bd8370f4
- Кан, П. Х., младший, Канда, Т. , Ишигуро, Х., Фрейер, Н. Г., Северсон, Р. Л., Гилл, Б. Т., Рукерт, Дж. Х., и Шен, С. (2012). «Робови, теперь тебе придется пойти в шкаф»: Социально-нравственные отношения детей с человекоподобным роботом. Психология развития, 48 (2), 303–314. Получено 17 ноября 2020 г. с https://doi.org/10.1037/a0027033 9.0260
- Николас А. Кристакис (30 августа 2019 г.). Как ИИ изменит нас. Атлантический океан. Получено 17 ноября 2020 г. с https://www.theatlantic.com/magazine/archive/2019/04/robots-human-relationships/583204/
- Уильям С. Робинсон (6 июня 2011 г.). Проблемы для робота-гуманоида. О человеке: проект Национального гуманитарного центра. Получено 17 ноября 2020 г. с https://nationalhumanitiescenter.org/on-the-human/2011/06/challenges-for-a-humanoid-robot/
- Канда, Т., Камасима, М., Имаи, М. и др. (2007). Человекоподобный робот, который делает вид, что слушает указания маршрута от человека. Auton Robot 22, 87. Получено 17 ноября 2020 г. с https://doi.org/10.1007/s10514-006-9.007-6
- Чакраборти, Санджит. (2018). Могут ли гуманоидные роботы быть нравственными? Этика в науке и экологическая политика. 18. 49-60. Получено 17 ноября 2020 г. с https://www.researchgate.net/publication/338512662_Can_humanoid_robots_be_moral
- Питер Х. Кан, Такаюки Канда, Хироши Исигуро, Брайан Т. Гилл, Джолина Х. Ракерт, Солас Шен, Хизер Э. Гэри, Эйми Л. Райхерт, Натан Г. Фрейер и Рэйчел Л. Северсон (2012). Возлагают ли люди на человекоподобного робота моральную ответственность за вред, который он причиняет? В Материалы седьмой ежегодной международной конференции ACM/IEEE по взаимодействию человека и робота (HRI ’12) . Ассоциация вычислительной техники, Нью-Йорк, штат Нью-Йорк, США, стр. 33–40. Получено 17 ноября 2020 г. из DOI: https://doi.org/10.1145/2157689.2157696
- Сэм Джинкс (11 ноября 2019 г.). Этика человеческих роботов: Сэм Джинкс привносит в дискурс точку зрения художника.
.
 , Ишигуро, Х., Фрейер, Н. Г., Северсон, Р. Л., Гилл, Б. Т., Рукерт, Дж. Х., и Шен, С. (2012). «Робови, теперь тебе придется пойти в шкаф»: Социально-нравственные отношения детей с человекоподобным роботом. Психология развития, 48 (2), 303–314. Получено 17 ноября 2020 г. с https://doi.org/10.1037/a0027033 9.0260
, Ишигуро, Х., Фрейер, Н. Г., Северсон, Р. Л., Гилл, Б. Т., Рукерт, Дж. Х., и Шен, С. (2012). «Робови, теперь тебе придется пойти в шкаф»: Социально-нравственные отношения детей с человекоподобным роботом. Психология развития, 48 (2), 303–314. Получено 17 ноября 2020 г. с https://doi.org/10.1037/a0027033 9.0260.
.
 с https://doi.org/10.1007/s10514-006-9.007-6
с https://doi.org/10.1007/s10514-006-9.007-6 .
.
