Содержание
Каталог космических роботов
Россия
Андроидная техника (НПО Андроидная техника), Москва
Теледроид, НПО Андроидная техника
2021. В 2020 году началась работа над проектом робота Теледроид с аватарным управлением. Планируется его отправка на орбитальную станцию в 2024 году. Робот, как ожидается, сможет работать как внутри станции, так и на ее внешней стороне.
Фёдор (FEDOR)
Проект робота-космонавта антропоморфного типа. Для работы на МКС. Планируется готовность к полету в космос в 2021 году.
SAR-401, НПО «Андроидная техника», Москва
Телеуправляемый андроид для работы в космосе. Дистанционно управляется оператором с помощью костюма-повторителя. Разработан в «начале» десятых годов XXI века. В 2016 году в ЦНИИмаш говорят о планах разработке на его основе робота для МКС со сроком готовности к 2020 году. Разработкой занимается НПО Андроидная техника. / Петербургский дневник
/ Петербургский дневник
Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Андронавт, Центр подготовки космонавтов имени Ю.А.Гагарина, Россия
Телеуправляемый андроид для работы на орбитальных космических станциях.
ЦНИИ РТК, Москва
КТМС-1, ЦНИИ РТК, Москва
Космическая транспортно-манипуляционная система для выполнения технологических операций на внешней поверхности космических аппаратов и поддержки экипажа при внекорабельной деятельности. Для работы в КА или на поверхности КА. Сокращение КТМС-1 введено RoboTrends.ru для удобства ссылок на систему.
Энергия (РКК Энергия), НПО «Андроидная техника», ЦНИИ РТК, Россия
Космобот, РКК Энергия, НПО «Андроидная техника», ЦНИИ РТК, Россия
В ноябре 2016 года представители РКК Энергия объявили о планах создания мобильного робота, который сможет эксплуатироваться на российском сегменте МКС в период с 2020 по 2024 год. Соответствующий конкурс выиграли РКК Энергия в кооперации с НПО «Андроидная техника» и ЦНИИ РТК. Ранее, как известно, в «Андроидной технике» создавали робота-аватара SAR-401. Мобильного робота планируется использовать на борту сооружаемого научно-энергетического модуля (НЭМ). О практической полезности такого робота на станции можно спорить, скорее речь идет об испытаниях работы робототехнических устройств в космосе — а это, конечно, нужно делать, учитывая перспективность освоения космического пространства с помощью автономных роботов. Что-то много уже «космических роботов» для работы на МКС в разработке развелось. А реально пока на МКС только американский Robonaut 2 летал.
Соответствующий конкурс выиграли РКК Энергия в кооперации с НПО «Андроидная техника» и ЦНИИ РТК. Ранее, как известно, в «Андроидной технике» создавали робота-аватара SAR-401. Мобильного робота планируется использовать на борту сооружаемого научно-энергетического модуля (НЭМ). О практической полезности такого робота на станции можно спорить, скорее речь идет об испытаниях работы робототехнических устройств в космосе — а это, конечно, нужно делать, учитывая перспективность освоения космического пространства с помощью автономных роботов. Что-то много уже «космических роботов» для работы на МКС в разработке развелось. А реально пока на МКС только американский Robonaut 2 летал.
МАСТЕР
Сеть российских, полностью роботизованных телескопов МАСТЕР.
Зарубеж
Австралия
Siding Spring Observatory, Австралия
телескоп-робот для автоматизированного сбора информации о космической среде
Германия
AILA, Германия
бортовой робот — андроид с возможностью работы в космосе
2015.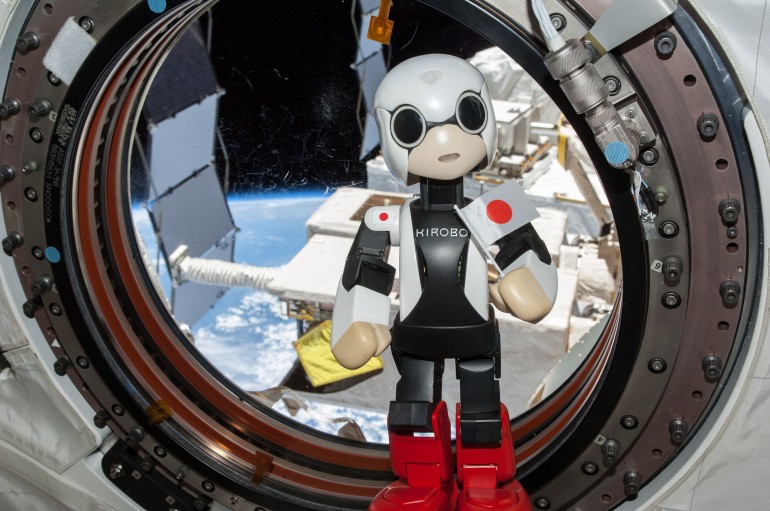 07.19 Европейский робот по имени AILA может стать вторым андроидом в космосе после американского Robonaut 2, который сейчас работает на МКС. AILA разработана в Robotics Innovation Center (German Research Center for Artificial Intelligence) и Robotics Group в Университете Бремена, Германия. Сейчас AILA проходит обучение работе на МКС на макете модуля Колумб.
07.19 Европейский робот по имени AILA может стать вторым андроидом в космосе после американского Robonaut 2, который сейчас работает на МКС. AILA разработана в Robotics Innovation Center (German Research Center for Artificial Intelligence) и Robotics Group в Университете Бремена, Германия. Сейчас AILA проходит обучение работе на МКС на макете модуля Колумб.
Евросоюз
ERA, Евросоюз
2021.11 Модуль Наука уже на орбите в составе МКС. Российские космонавты отработали на Земле в ЦПК процедуру переноса радиатора с имитатора модуля Рассвет на имитатор модуля Наука с помощью тренажера робота-манипулятора Дон-ERA. Выполнить эту операцию планируется на орбите летом 2022 года.
2018. Робот-манипулятор длиной 11.3 м и массой 600 кг. Должен работать на модуле «Наука», который планируется запустить к МКС. Сроки запуска российского модуля несколько раз переносились и в 2018 году речь идет уже о ноябре 2019 года. / 3dnews.ru 2018.06.12
/ 3dnews.ru 2018.06.12
Philae, Европа
Робот-зонд, предназначенный для автоматизированных исследований кометы 67Р/Чюрюмова-Герасименко. Вес — около 100 кг. Посадка на комету — 12.11.2014. Доставлен космическим аппаратом Розетта. После 60 часов работы от батареи, робот перешел в спящий режим. Через почти 7 месяцев «сна», 14 июня 2015 года робот подзарядился, поскольку комета приблизилась к Солнцу и готов к проведению дальнейших экспериментов.
Индия
Vyimmitra, Индия
«Веммитра», индийский робот «полуандроидного» типа. Только верхняя часть туловища, без ног. Он, как ожидается, будет на борту индийского космического корабля во-время первого беспилотного полета. Робот будет «женщиной» и станет говорить на двух языках. Представлен в январе 2020 года.
Канада
Canadarm2, Канада
Другое название — Dextre.
Dextre, MDA Space Missions, подразделение компании MacDonald Dettwiler по заказу Канадского космического агентства, Канада
грузовой манипулятор для работы на поверхности МКС. Дистанционно управляется оператором, в том числе может управляться оператором наземного центра управления.
Китай
China Aerospace Science and Technology Corp., Китай
Хiaotian, China Aerospace Science and Technology Corp., Китай
робот для космических исследований на борту орбитальных станций и в открытом космическом пространстве.
2015.11.08 Китайский косморобот Xiaotian сделан по-мотивам марвеловского супергероя?
США
NASA, США
Astrobee, NASA, США
бортовой свободно летающий робот в форме небольшого куба с закругленными гранями для использования на МКС (на рисунке — концепт). В разработке с планами готовности в 2017 году. NASA проводит краудсорсинговый конкурс на проект манипулятора для робота. Робот будет оснащен камерой, микрофоном, RFID-сканером. Задачи на борту: отслеживание качества воздуха, уровня шума, а также выполнение ряда задач с целью снижения нагрузки на космонавтов. Кроме того, робот поможет с тестированием новых технологий и будет выполнять функции робота телеприсутствия для специалистов центра управления полетами в Хьюстоне.
В разработке с планами готовности в 2017 году. NASA проводит краудсорсинговый конкурс на проект манипулятора для робота. Робот будет оснащен камерой, микрофоном, RFID-сканером. Задачи на борту: отслеживание качества воздуха, уровня шума, а также выполнение ряда задач с целью снижения нагрузки на космонавтов. Кроме того, робот поможет с тестированием новых технологий и будет выполнять функции робота телеприсутствия для специалистов центра управления полетами в Хьюстоне.
Biobot
2018. Финансируемый NASA в 2018 году проект. В его рамках создают небольшого по размерам робота, задача которого — выступать компаньоном человека-космонавта, транспортировать часть системы жизнеобеспечения космонавта. Такой подход, как ожидается, повысит время автономного пребывания космонавта на поверхности других планет без необходимости возвращаться на базу для пополнения ресурсов. Первоначальная сумма финансирования — $125 тыс.
Clipper, NASA, США
Проект исследования спутника Юпитера — Европы. В 2016 году на него будет потрачено $30 млн. Цель — поиск признаков обитаемости. Планируемое время запуска — 2025 год.
В 2016 году на него будет потрачено $30 млн. Цель — поиск признаков обитаемости. Планируемое время запуска — 2025 год.
Curiosity, NASA, США
марсоход, действует на Марсе на 2015.05
InSight, США
В мае 2015 года начались испытания спроектированного по заказу NASA марсианского зонда InSight на базе Lockheed Martin около Денвера. Видео. Задачи: изучить сейсмику Марса, температурный режим на глубинах до 5 метров, выявить распределение масс в центре планеты, изучение размеров, плотности и общей структуры Марса, ядра, мантии и коры.
2015.05.29 NASA тестирует новый марсоход Инсайт.
K-REX, NASA, США
Робот для использования на поверхности Луны с элементами ИИ и когнитивными способностями. Должен будет находить удобные маршруты для перемещения по пересеченной поверхности нашего спутника. «Знает» основные законы физики и применяет их для выбора оптимального безопасного маршрута.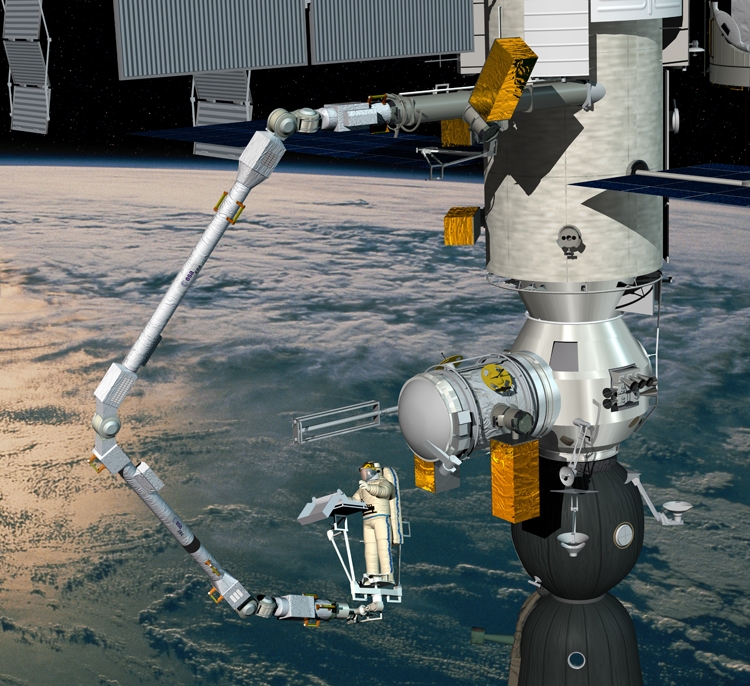 Пока что не может менять планы в ходе их исполнения — т.е. составляет программу заранее, а затем ей следует.
Пока что не может менять планы в ходе их исполнения — т.е. составляет программу заранее, а затем ей следует.
2016.05.23 Робот удивил людей творческим подходом.
Mars 2020, NASA, США
Ровер, презназначенный для проведения исследований на Марсе, начиная с 2021 года. Ровер будет построен с учетом опыта Curiosity и с использованием ряда его узлов. Новинка получит ряд новых сенсоров и другие задачи. В частности, робот будет собирать пробы грунта, проверять их на предмет следов микробной жизни. У нового ровера изменится конструкция колес, они станут прочнее, чем у Curiosity. Изменится схема посадки ровера на Марс.
Marsbee
Финансируемый NASA в 2018 году проект создания роя летающих роботов-пчел, которые могли бы оказать помощь астронавтам в изучении Марса. Первоначальная сумма финансирования — $125 тыс.
Opportunity, США
MER-B (Mars Exploration Rover — B). Беспилотный ровер — марсоход. Начал работу на поверхности Марса в 2004 году. Остается активным и на 2015 год.
R5, NASA/DARPA, США
Робот для использования в космосе, на Луне, на Марсе. С двумя ногами и возможностью хождения. На 2015.11 в разработке.
Shapeshifter
Финансируемый NASA в 2018 году проект, который подразумевает создание группы роботов, которые могут, объединяясь, принимать различную форму. Это позволит им исследовать поверхность Титана (спутника Сатурна). Первоначальная сумма финансирования — $125 тыс.
Northrop Grumman, Oceaneering Space Systems, США
Archinaut, Made in Space, Northrop Grumman, Oceaneering Space Systems, США
2017.05.15 Archinaut — стройка на орбите. Made In Space демонстрирует видео-рендеринг более крупной системы — технологической платформы Archinaut, которая позволяет осуществлять автономное производство и сборку космических систем на орбите. Archinaut в перспективе сможет производить и собирать большое оборудование, такое как спутники или даже космическую станцию. Проект основан на использовании аддитивных технологий.
2016.03.08 Роботизированный 3D-принтер способен строить космические объекты. А также печатать то, что требуется на борту МКС.
Stone Aerospace, США
DEPTH, Stone Aerospace, США
Deep Phreatic Thermal Explorer. Так называемый «криобот». Разработка по заказу NASA автономного исследовательского робота, способного бурить ледяную поверхности Европы. Обладает встроенным источником энергии и лазерными светодиодами, позволяющими расплавлять лед, чтобы робот мог продвинуться под ледяной панцирь Европы. Аппарат снабжен подводным транспортным средством ARTEMIS (Autonomous Rover / airborne-radar Transects of the Environment Beneath the McMurdo Ice Shelf) — прототипом зонда, способного исследовать термальные источники.
2015. 06.15 Робот-бурильщик сможет исследовать ледяные спутники.
Robonaut 2 или R2, General Motors и NASA при содействии Oceaneering Space Systems, США
фото: NASA
Эволюция проекта Robonaut. Программа Robonaut стартовала в 1997 году. Планировалось, что испытать робота в космосе можно будет еще в 2005 году. В 2014 году был выбран в качестве NASA Government Invention. Официальная страница Robonaut 2.
2015.06.21 Robonaut 2 появился на МКС. Робот планируют использовать для «медицинских задач» под управлением докторов, находящихся на Земле. Цель программы — переложить на робота повторяющиеся работы.
2015.06.21 NASA has a robot in International Space Station.
Stone Aerospace, США
VALKYRIE, Stone Aerospace, США
Very deep Autonomous Laser-powered Kilowatt-class Yo-yoing Robotic Ice Explorer, разработка компании Stone Aerospace в рамках проекта NASA. Развитие идей исследовательского робота DEPTHX для исследований Европы, спутника Юпитера. В отличие от прототипа, у этого робота источник энергии является внешним и может быть оставлен на поверхности, лазерный луч для бурения льда идет к роботу по сверхтонкому оптоволокну. В 2015 году мощность лазера составляет 5 кВт, к моменту полета на Европу мощность лазера, как ожидается, достигнет 250 кВт. Идея в том, что робот, оказавшись на поверхности Европы, проведет бурение льда. В 2014 году в испытаниях VALKYRIE спустилась на глубину 31 метр в леднике Матануска на Аляске.
2015.06.15 Робот-бурильщик сможет исследовать ледяные спутники.
X-37B, США
фото: United States Air Force
беспилотный космический челнок (Orbital Test Vehicle-4). Размеры шатлла 2.9 м в высоту и 8.9 м в длину. Аппарат способен перемещаться в космосе благодаря реактивному двигателю.
2017.05.07 Беспилотный орбитальный челнок X-37 вернулся на Землю после полета продолжительностью в 2 года, совершив посадку на территории Космического центра Кеннеди на мысе Канаверал. Пентагон не раскрывает целей полета (упоминалось только о проверке работы ионных микрореактивных двигателей и свойств материалов в космосе).
XS-1, DARPA, США
Подробнее в разделе «Космические челноки»
Япония
GITAI, Япония
2021.11 На МКС прошли испытания универсального робота для космоса GITAI S1, разработанного стартапом GITAI, Япония. Испытания проводились 3 дня, с 13 по 16 октября 2021. Робота на орбиту доставляла NASA. Космонавты смонтировали робота в шлюзовой камере Nonorack Bishop Airlock. Робот успешно справился с решениями двух задач, включенных в программу испытаний, в частности, произвел монтаж, сборку, подключение элементов панели управления шлюзом, подключил кабельные соединения. Также робот взаимодействовал с элементами панели управления. В основном робот справился с заданием самостоятельно, в некоторых случаях ему дистанционно помогли специалисты центра управления модулем из Хьюстона. Робот GITAI S1 это робот андроидного типа (торс с двумя руками-манипуляторами), но на этот раз на орбиту летала только одна его «рука». ВИДЕО.
Японское агентство аэрокосмических исследований, Япония
HTV, Японское агентство аэрокосмических исследований, Япония
H-II Transfer Vehicle, японский беспилотный автоматический грузовой космический корабль, созданный в Японском агентстве аэрокосмических исследований. Разработка и постройка обошлась в $680 млн. Длина — около 10 метро, максимальный диаметр — 4.4 м, масса — 10.5 т, грузоподъемность — до 6 т., автономный полет — до 100 часов. Одноразовый, после доставки грузов на МКС, сходит с орбиты и прекращает существование. Не имеет возможностей автостыковки с МКС, стыковку обеспечивает роборука Dextre, Канада, установленная на МКС.
Страна неизвестна
SPHERES
Автономный дрон для использования на обитаемых космических орбитальных станциях.
SpiderFab
Концепт робота для работы в космосе.
2013.09.03 SpiderFab: Architecture for On-Orbit Construction of Kilometer-Scale Apertus
«ЦПК им. Ю.А. Гагарина. Место, где разрабатывают российских роботов для освоения космоса» в блоге «Своими глазами»
© Бионышева Елена/Сделано у нас
Научно-исследовательский испытательный центр подготовки космонавтов имени Ю.А. Гагарина (ЦПК) — головное в стране учреждение, которое занимается работами по отбору и подготовке космонавтов, обеспечению их безопасного пребывания на орбите и реабилитацией по возвращении. Новая для центра сфера деятельности — разработка антропоморфных роботов, которые смогут заменить космонавтов в рискованных для жизни ситуациях. Корреспонденты «Сделано у нас» посетили учреждение и узнали больше об этом инновационном направлении.
Центр подготовки космонавтов имени Гагарина принимает участие в разработке и тестировании роботов и робототехнических устройств космического назначения уже с 2010 года. «Робототехника — достаточно сложное направление, которое постоянно развивается. Практически все ведущие космические агентства в данный момент занимаются исследованием в области антропоморфной робототехники, которая способна фактически выполнять функции человека, — комментирует начальник научного управления ЦПК доктор технических наук Андрей Анатольевич Курицын. — В России есть несколько компаний, которые занимаются робототехникой, в том числе для пилотируемой космонавтики. Совместно с внешними организациями мы уже провели ряд научно-исследовательских работ, которые демонстрируют возможности данных роботов на данный момент».
© Бионышева Елена/Сделано у нас
© Бионышева Елена/Сделано у нас
© Бионышева Елена/Сделано у нас
Антропоморфные роботы активно совершенствуются: уже сейчас есть как модели, которые полностью автономны, так и модели, построенные на синтезе автоматического и ручного управления. В своих разработках специалисты ЦПК двигаются сразу в нескольких направлениях. «Это и использование специальных виртуальных моделей, на которых можем отрабатывать управление роботом, и управление с помощью экзоскелетов уже настоящим физическим объектом», — говорит начальник научного управления ЦПК.
С июля 2011 года ЦПК сотрудничает с АО НПО «Андроидная техника» и помогает ему в проведении испытаний разработанных им антропоморфных робототехнических систем. Расположенное в Магнитогорске предприятие получило широкую известность после создания антропоморфного робота-спасателя Федора (FEDOR, от англ. Final Experimental Demonstration Object Research — «Финальный экспериментальный демонстрационный объект исследований»). На тот момент робот обладал уникальными возможностями: например, мог стрелять с двух рук, работать с дрелью, самостоятельно открыть дверь, сесть в автомобиль, выжать сцепление и газ и поехать в автономном режиме. В 2019 году «Федор» отправился на МКС и был испытан в автономном режиме под управлением космонавтов, а после вернулся на Землю.
«Когда в НПО „Андроидная техника“ занимались созданием робота „Федора“, мы вместе с ними сделали специализированный робототехнический компьютеризированный стенд в ЦПК, который позволяет отрабатывать упражнения по управлению такими антропоморфными роботами, — комментирует Курицын. — Мы также получили от Фонда перспективных исследований прототип робота „Федора“ — одну из его первых модификаций, которая у нас используется».
Сегодня вопрос эффективности использования антропоморфных робототехнических систем еще остается открытым. В частности, требует дополнительного изучения проблема согласования элементов системы, особенно — с учетом трудностей оперативного обмена информацией из-за больших задержек прохождения сигналов в космосе. Именно из-за вероятных рисков и высокой стоимости оборудования антропоморфные роботы и нуждаются в испытаниях на компьютеризированном стенде ЦПК. Такой стенд включает в себя органы управления робототехническими системами, специальное программное обеспечение (включающее виртуальные модели), автоматизированные рабочие места бригады обеспечения эксперимента и позволяет отработать взаимодействие космонавта с роботами.
© Бионышева Елена/Сделано у нас
© Бионышева Елена/Сделано у нас
Российский «Федор» был не первым роботом на МКС: в 2011 году на станцию отправился американский человекоподобный робот Робонавт-2 и какое-то время помогал космонавтам в простой работе под управлением с Земли. Но отечественные разработчики идут по иному пути, чем их коллеги из США. «Это [Робонавт-2] совсем другое устройство. Оно работает по заранее написанной программе, — объясняет Андрей Анатольевич. — У нас другая задача — сделать так, чтобы робот был продолжением оператора».
© Бионышева Елена/Сделано у нас
© Бионышева Елена/Сделано у нас
В 2019 году в ЦПК прошли успешные эксперименты по отработке взаимодействий космонавта с антропоморфным роботом. Он управляется в телеоператорном режиме, что позволяет ему в точности копировать движения и действия облаченного в специальный костюм оператора. При этом человек видит передаваемое камерами робота изображение через очки виртуальной реальности, а система создает эффект его погружения в те же физические обстоятельства, в которых находится робот. Работа в этом направлении продолжается. «Сейчас, например, мы ставим на нашем устройстве систему обратной связи. Если робот рукой упрется в стену — оператор это почувствует», — делится Курицын.
© Бионышева Елена/Сделано у нас
© Бионышева Елена/Сделано у нас
Начальник научного управления ЦПК считает создание антропоморфных роботов перспективным направлением, которое в будущем прочно войдет в жизнь. «Например, на посещаемой лунной базе произошел отказ, при отсутствии космонавта проще использовать дистанционно робота для устранения нештатной ситуации — прогнозирует Курицын. — Для несложных работ снаружи космической станции (снять какой-то прибор или проверить, есть ли повреждения от микрометеоритов) нет смысла отправлять в открытый космос космонавтов, ведь выход — штука трудная и опасная, с этим может справиться и робототехническая система. Один из приоритетов ЦПК — обеспечение безопасности космонавта, поэтому если есть техническая возможность в ряде случаев в опасных ситуациях заменить человека машиной — это целесообразно сделать».
© Бионышева Елена/Сделано у нас
Фото и текст: Бионышева Елена
Фото: Клиндухов Алексей
Как роботы используются в освоении космоса?
Исторически роль робототехники в освоении космоса была значительной из-за непригодных для жизни условий внеземных планет Солнечной системы. Согласно AZO Robotics , робот определяется как «самоуправляемое устройство, состоящее из электронных, электрических или механических блоков, которые могут функционировать вместо живого агента». В этом посте вы узнаете немного об истории роботов в освоении космоса и 5 самых популярных робототехнических систем, используемых в истории космоса.
До того, как ученые начали отправлять роботов в космос, животных, таких как собаки или обезьяны, часто отправляли для выполнения заданий и проведения экспериментов, чтобы расширить знания людей об условиях на других планетах и на Луне.
По мере совершенствования робототехники все больше этих экспериментов и задач было делегировано роботам, а не живым существам; таким образом робототехника сохраняет жизни. В то время как люди ступили на Луну, научные знания об условиях на планетах, включая Марс, Венеру, Титан и Юпитер, получены почти исключительно из исследований, проводимых роботами. По мере того, как технологии постепенно позволяют роботам быстрее достигать космоса, люди могут получать значительно больше данных об условиях в космосе.
Читайте по теме: 9 лучших космических подкастов для космических фанатов , согласно НАСА . Sputnik 1 был первым искусственным спутником Земли и первым объектом, созданным людьми на орбите Земли. Запуск Спутника 1 положил начало пресловутой «космической гонке» между США и СССР. После этого инженеры все чаще начали конструировать роботов для отправки на внеземные планеты для различных целей, начиная от фотографирования планет крупным планом и заканчивая определением того, поддерживают ли другие планеты жизнь.
Космический робот 2: Маринер 2 и 4
Согласно Universe Today , 14 декабря 1962 года американский космический зонд Маринер 2 стал первым автоматическим космическим зондом, совершившим успешный облет Венеры. Mariner 4 , первый орбитальный аппарат, отправленный в космос, затем 14 июля 1965 года сделал первые проксимальные фотографии Марса. чтобы ученые наблюдали и анализировали. Поскольку роли этих роботов различны, орбитальные и посадочные аппараты часто отправляются исследовать космос в тандеме.
Связанный прочитал: 5 инновационных компаний с глубоким космосом
Space Robot 3: Viking 1 и 2
20 августа 1975 г. NASA ‘ S Viking . исследовать Марс, согласно НАСА . Вскоре после этого, 9 сентября 1975 года, с той же миссией был запущен идентичный космический корабль под названием Viking 2 . Оба космических корабля были оснащены той же роботизированной техникой, что и 9-й.0005 Mariners 2 и 4 — спускаемый аппарат и орбитальный аппарат. Роли орбитальных аппаратов заключались в том, чтобы сфотографировать поверхность Марса, а посадочные модули должны были приземлиться на планету и собрать данные, чтобы ученые могли больше узнать о том, существует ли жизнь на Марсе. Орбитальные аппараты каждого космического корабля летели вместе, но посадочные модули в конечном итоге разделились, чтобы исследовать разные области поверхности Марса.
Изображение: Viking 1 (через NASA JPL)
Почти год спустя, 20 июля 1976, Посадочный модуль Viking 1 стал первым космическим кораблем Соединенных Штатов, приземлившимся на поверхность Марса, в частности, приземлился в регионе, известном как Chryse Planitia . 3 сентября 1976 года посадочный модуль «Викинг-2» приземлился в другом регионе планеты, известном как Utopia Planitia . Хотя ожидалось, что миссия Viking продлится всего 90 дней после приземления каждого посадочного модуля, оба посадочных модуля просрочили свой расчетный срок службы. Viking Orbiter 1 выполнено 1489орбиты, закончив свою миссию 7 августа 1980 года, а Viking Orbiter 2 завершил свою миссию 25 июля 1978 года. Оба посадочных модуля приводились в действие радиоизотопными термоэлектрическими генераторами, которые позволяют им передавать информацию на Землю в течение более длительных периодов времени. Последняя передача Viking Lander 1 на Землю состоялась 11 ноября 1982 года, а последняя передача Viking Lander 2 — 11 апреля 1980 года. 0002 Роботы покинули Солнечную систему в 1977 году, когда были запущены «Вояджеров» 1 и 2 для изучения внешней части Солнечной системы. Согласно НАСА , два робота были разработаны для проведения детальных исследований Юпитера и Сатурна, колец Сатурна, а также Юпитера и самой большой луны Сатурна. Два робота продолжают это путешествие уже более 40 лет и в настоящее время находятся ближе к Плутону, чем к Земле или Солнцу. Только в августе 2012 года «Вояджер-1» вышли в межзвездное пространство, а Voyager 2 в конце концов последовал за ним 5 ноября 2018 года. В настоящее время оба робота все еще передают информацию через Deep Space Network (DSN) .
Космический робот 5: Dextre
Совсем недавно Канадская космическая ассоциация запустила Dextre , робота-манипулятора, предназначенного для «установки и замены небольшого оборудования, такого как наружные камеры или 100-килограммовые батареи, используемые в космических аппаратах. станции, заменить неисправные компоненты в электрических системах станции и испытать новых инструментов и методов робототехники». По данным Канадского космического агентства , Dextre технически является самым совершенным космическим роботом, созданным на сегодняшний день.
Dextre в настоящее время эксплуатируется командами наземного управления из Канадской космической ассоциации и НАСА. Одни только руки Dextre укомплектованы моторизованным гаечным ключом, выдвижным разъемом питания, разъемом для передачи данных и видео, камерой и подсветкой. Декстр 9Руки 0006 предназначены для захвата как громоздкого, так и хрупкого оборудования, что делает Dextre адаптируемым к различным условиям и проектам. В 2008 году Dextre был установлен на Международной космической станции, а затем запущен на борту шаттла Endeavour .
Согласно CNET , некоторые роботы, в настоящее время исследующие космос, включают Dextre, Voyager 1 и 2 , Космический телескоп Хаббла, Cassini, Robonaut 2, Rosetta, Dawn, Mars Express, Curiosity, Opportunity, 2001 Mars Odyssey, Advanced Composition Explorer, Hayabusa 2, Juno, Mars Orbiter Mission , Новые горизонты и другие в будущем. Преимущества разработки и отправки роботов в космос включают обогащение научных знаний, сохранение человеческой жизни и достижения в области технологий искусственного интеллекта. По мере развития технологий роботы все чаще служат людям современным окном в мир за пределами Земли.
Биография автора:
Грегори Миллер — писатель из DO Supply, который занимается робототехникой, искусственным интеллектом и автоматизацией. Когда он не пишет, ему нравится ходить в походы, заниматься скалолазанием и рассуждать о достоинствах кофе.
Источники:
- Канадское космическое агентство: http://www.asc-csa.gc.ca/eng/iss/dextre/about.asp
- CNET: https://www.cnet.com/pictures/robots-that-are-in-space-right-now/
- Universe Today: https://www.universetoday.com/43750/robots-in-space/
- НАСА: https://history.
 nasa.gov/sputnik/
nasa.gov/sputnik/ - НАСА: https://mars.nasa.gov/programmissions/missions/past/viking/
- НАСА: https://voyager.jpl.nasa.gov/mission/
Почему мы отправляем роботов в космос?
робототехника
Марсоход Curiosity делает автопортрет на марсианской песчаной дюне. Предоставлено: NASA/JPL-Caltech/MSSS
Мы можем отправить роботов для исследования космоса, не беспокоясь об их безопасности. Конечно, мы хотим, чтобы эти тщательно сконструированные роботы прослужили долго. Нам нужно, чтобы они оставались поблизости достаточно долго, чтобы провести расследование и отправить нам информацию о своих пунктах назначения. Но даже если роботизированная миссия потерпит неудачу, люди, участвующие в миссии, останутся в безопасности.
Отправить робота в космос также намного дешевле, чем отправить человека. Роботам не нужно есть, спать или ходить в туалет. Они могут выжить в космосе в течение многих лет и могут быть оставлены там — нет необходимости возвращаться!
Кроме того, роботы могут делать много вещей, недоступных людям. Некоторые из них могут выдерживать суровые условия, такие как экстремальные температуры или высокий уровень радиации. Роботы также могут быть созданы для выполнения действий, которые были бы слишком рискованными или невозможными для астронавтов.
Какие роботы сейчас разрабатывает НАСА?
Вы, наверное, слышали о некоторых роботах НАСА: марсоходах, таких как Perseverance и Curiosity. Но это лишь некоторые из самых известных роботов. Инженеры НАСА постоянно работают над новыми роботами.
НАСА исследует Марс с помощью марсоходов с тех пор, как миссия Pathfinder приземлилась в 1997 году и запустила небольшой марсоход Sojourner. Предоставлено: NASA/JPL-Caltech.
Один из новейших роботов получил прозвище A-PUFFER, сокращение от Autonomous Pop-Up Flat Folding Explorer Robot. Вдохновением для создания этого легкого двухколесного искателя приключений послужили рисунки оригами. Робот может распрямляться и наклоняться, чтобы исследовать узкие места.
Посмотрите это видео, чтобы увидеть Puffer в действии! Видео предоставлено: NASA/JPL-Caltech
Еще есть BRUIE, плавучий вездеход для исследования подо льдом. Этот робот может плавать в воде и катить колеса по нижней стороне ледяной поверхности, одновременно фотографируя и собирая данные.
Ученые надеются когда-нибудь использовать подобного робота для поиска признаков жизни на ледяных телах в других частях Солнечной системы. Например, подземные океаны спутника Юпитера Европы или спутника Сатурна Энцелада.
Робот BRUIE катит колесами по нижней стороне ледяной поверхности. Изображение предоставлено: NASA/JPL-Caltech
Все роботы-марсоходы НАСА?
Конечно нет! Взгляните на этого робота по имени Ежик.
Колючий кубический робот Ежик. Изображение предоставлено: NASA/JPL-Caltech/Stanford
Этот колючий куб робота разрабатывается НАСА совместно со Стэнфордским университетом и Массачусетским технологическим институтом. Hedgehog предназначен для исследования небольших тел, таких как астероиды или кометы. У них очень небольшая гравитация и чрезвычайно пересеченная местность. Вместо того, чтобы катиться, Ёжик прыгает и кувыркается.
Что, если он приземлится вверх ногами? Ничего страшного. Он может работать с любой из его сторон. Он может даже выбраться из глубокой воронки, используя маневр, похожий на торнадо, который запускает робота в воздух.
Производит ли НАСА роботов, похожих на людей?
Да! Их называют роботами-гуманоидами. Есть некоторые задачи, для которых лучше всего подходит робот, который двигается как человек. Например, нам может понадобиться робот-гуманоид, который поможет подготовить будущее человеческое поселение на Марсе. Имея в виду такие задачи, Космический центр имени Джонсона НАСА разработал робота по имени R5, или Валькирия.
Человекоподобный робот по имени R5 или Валькирия. Изображение предоставлено: NASA
Этот электрический робот использует камеры, датчики, множество двигателей и два компьютера.