Содержание
Роботы-насекомые
Исследователи из Гарвардского университета разработали метод, который позволит роботам-насекомым, находится в воздухе в несколько раз дольше, чем раньше.
Инженеры и ученые постоянно сотрудничают, чтобы создавать более совершенных летающих роботов. Природа является отличным источником вдохновения для этих целей. Летающие насекомые и птицы дают прекрасное представление о том, как летать в воздухе.
Микроскопическое воздушное транспортное средство (МВТС), обладающее способностью, остаться в воздухе в течение длительного времени, было бы неоценимым во многих приложениях: обеспечение обзора с высоты птичьего полета на зону бедствия, обнаружение опасных химических или биологических веществ или организация передачи сигнала в специальных сетях связи. Однако время полета воздушных роботов ограничено весом встроенного блока питания и сроком службы их механических компонентов. Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства.
МВТС может существенно увеличить продолжительность своей миссии, сумев за что-нибудь закрепиться, например, за деревья, здания или линии электропередачи. С этим заданием отлично справляются птицы, летучие мыши и насекомые, которые прекрасно держатся на деревьях даже при сильном ветре и в дождь. Однако для робота это оказалось довольно сложным, и справиться с такой задачей смогли лишь небольшие устройства размером с птицу, используя пассивный биомиметический захват, микрокрючки или иголки.
Летающие роботы размером с насекомое могут стать более маневренными, а также значительно снизить себестоимость аппаратов. Однако их использование имеет ряд дополнительных проблем. Например, для прикрепления МВТС не подойдут ни механические способы, из-за эффекта дестабилизации асимметрично движущихся частей устройства, ни химическое прилипание, которое или будет необратимым, или требует большого давления. Отличной альтернативой, которая успешно себя проявила, является электростатическое прилипание.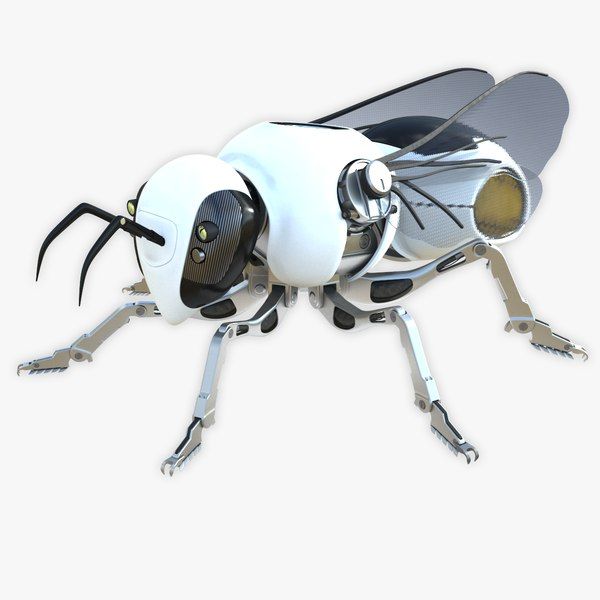
Исследователи протестировали этот метод на дециметровом роботе(RoboBee, разработанный в 2013 году), который прикреплялся к вертикальным стенам. Такая форма крепления, по силе прилипания проигрывает некоторым другим методам. Однако с уменьшением размера устройства этот метод является все более привлекательным. Метод основан на электростатической силе, возникающей между встроенным в робота круглым электродом и поверхностными зарядами, находящимися на поверхности (разность потенциалов при этом достигает 1000 В). При такой «посадке» робот затрачивает в 500-1000 раз меньше энергии, чем во время полета, тем самым увеличивая время автономной эксплуатации. При необходимости отрыва робота от поверхности необходимо просто обесточить электроды.
Прежде чем прикрепиться робот достигает состояния стабильного зависания под какой-либо поверхностью. При контакте с роботом на подложке возникают поверхностные заряды, что приводит к электростатическому притяжению. Эти поверхностные заряды рекомбинируют (исчезают), когда напряжение между электродами отключается. На рисунке видно, как летательный аппарат успешно прикрепляется к листу, стеклу и куску фанеры, а затем плавно садится на землю.
На рисунке видно, как летательный аппарат успешно прикрепляется к листу, стеклу и куску фанеры, а затем плавно садится на землю.
Следует отметить, что использование роботов-насекомых сопряжено со значительными трудностями в производстве, запуске, контроле. Тем не менее, уменьшение размеров роботов дает и новые возможности. Методика электростатического прилипания может также найти применение в других мелких робототехнических задачах.
Источник: «Science»
робототехникаметод электростатического прилипанияМикроскопическое воздушное транспортное средствоRoboBee
Если у вас есть статья, заметка или обзор, которыми вы хотите поделиться с аудиторией нашего сайта, присылайте информацию на: [email protected].
Комментариев нет. Стань первым!
Роботы-насекомые со всех концов света: применение и перспективы
Инженеры и ученые постоянно сотрудничают, чтобы создавать более совершенных летающих роботов. Природа является отличным источником вдохновения для этих целей. Летающие насекомые и птицы дают прекрасное представление о том, как летать в воздухе. Микроскопическое воздушное транспортное средство (МВТС), обладающее способностью, остаться в воздухе в течение длительного времени, было бы неоценимым во многих приложениях: обеспечение обзора с высоты птичьего полета на зону бедствия, обнаружение опасных химических или биологических веществ или организация передачи сигнала в специальных сетях связи. Однако время полета воздушных роботов ограничено весом встроенного блока питания и сроком службы их механических компонентов. Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства. Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов.
Природа является отличным источником вдохновения для этих целей. Летающие насекомые и птицы дают прекрасное представление о том, как летать в воздухе. Микроскопическое воздушное транспортное средство (МВТС), обладающее способностью, остаться в воздухе в течение длительного времени, было бы неоценимым во многих приложениях: обеспечение обзора с высоты птичьего полета на зону бедствия, обнаружение опасных химических или биологических веществ или организация передачи сигнала в специальных сетях связи. Однако время полета воздушных роботов ограничено весом встроенного блока питания и сроком службы их механических компонентов. Кроме того, выносливость воздушных роботов существенно уменьшается, когда уменьшается размер устройства. Несмотря на существование магнитных микроботов, ученые продолжают искать компромисс — простое и функциональное решение в конструировании крошечных роботов.
Воспользуйтесь нашими услугами
Они могут быть полезны в медицине, разведке и исследовании ареалов. Под катом собрали перспективные проекты роботов-насекомых. Каких размеров и форм они бывают, как работают — рассказываем в подборке.
Под катом собрали перспективные проекты роботов-насекомых. Каких размеров и форм они бывают, как работают — рассказываем в подборке.
Миниатюризация приводит исследователей на стык электроники и «примитивных» механизмов. К первой группе относится последняя версия гарвардского робота-таракана HAMR-F, которая вышла в 2018 году.
HAMR-F. Источник
Цель была проста — сделать мобильного и небольшого робота для исследования труднодоступных мест.
На борту установлены два микроконтроллера, приводы для управления клешнями и литий-полимерная батарея на 8 мАч. Полностью собранный робот весит 2,8 грамма, а его длина — 4,5 см. Относительно следующих проектов это много. HAMR-F не только самый габаритный, но и самый тяжелый среди «насекомых».
Зато робот опережает конкурентов в скорости: HAMR-F может пробежать 17,2 см за секунду. Это почти в 4 раза больше его длины.
 youtube.com/embed/T7GQzWigvTM?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/T7GQzWigvTM?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
MicroTug. Источник
В 2015 году ученые из Стэнфорда создали робота, который может передвигать массу, превышающую его собственную в 2000 раз. Притом, что масса «муравья» составляет 12 г.
Демонстрация возможностей MicroTug
Можно подумать, что брюшко робота прилегает вплотную к поверхности и создает вакуум, но это не совсем так.
На брюшке расположен механизм, который опускает клейкую основа до упора с поверхностью. Трос подтягивает груз и робот отцепляется от поверхности. Такие рывки робот продолжает делать, пока не доползет до пункта назначения. В остальном устройство робота напоминает HAMR-F.
В остальном устройство робота напоминает HAMR-F.
Как и HAMR-F, робот может исследовать только наземные объекты. Но это не единственная «среда обитания» роботов-насекомых. Доказательство этому — проект RoboBee.
В 2013 году группа ученых из Гарвардского университета представила робота-пчелу. Невооруженным взглядом робота сложно отличить от летающего полосатого насекомого. Хотя, кажется, робот больше напоминает стрекозу.
RoboBee. Источник
Его габариты соответствующие: длина — 3 см, масса — 80 мг. Даже звук от крыльев напоминает шелест крыльев стрекозы. Притом частота взмахов стрекозинных крыльев меньше, чем у RoboBee: 80 Гц против 120 Гц.
Взлет RoboBee
Системы управления RoboBee были разработаны с нуля. Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Крошечный робот использует пьезоэлектрические приводы, которые расширяются и сжимаются при воздействии электромагнитного поля. Пьезоэлектрический моторочик — одна из немногих миниатюрных альтернатив электромагнитных двигателей.
Корпус RoboBee выполнен из углеродистого волокна. Это придает роботу легкость и прочность. Крылья могут вращаться как синхронно, так и по отдельности.
Конструкция RoboBee. Источник
Конкретно у первой модели есть проблемы с питанием. По аналогии с роботом-оригами Mori, о котором мы писали в предыдущей статье, к роботу через медный кабель подключен внешний источник питания. Оттого полеты RoboBee могут напоминать игру с воздушным змеем.
В 2015 году разработчики доработали проект и заявили, что робот может перемещаться под водой. Но не все так однозначно: вторая версия RoboBee способна лишь на переход из воздушной среды в воду.
RoboBee переходит из воздуха в воду
Робот не может сделать обратный переход из воды в воздух. Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
Это связано с тем, что плотность воды в 100 раз больше плотности воздуха. Когда робот помещается в воду, частота взмахов тут же снижается до 9-13 Гц. Набрать обороты заново проблематично.
В 2017 году инженеры показали миру третью версию RoboBee, которая умеет выныривать из воды. Робот стал меньше по длине (2 см), но тяжелее в два раза (175 мг).
Результата удалось достичь с помощью новых элементов в конструкции, которые помогают роботу на каждом этапе выныривания:
- Робот плывет к поверхности и собирает воду в воздушное отделение.
- Электролитическая пластина преобразует воду в газ, который выталкивает робота из воды. Угловые поплавки помогают роботу стабилизироваться.
RoboBee вылетает из воды. Источник
Через два года разработчики выпустили последнюю на сегодняшний день версию RoboBee. Робот может летать без подключения ко внешним источникам питания.
RoboBee 4*. Источник
Инженеры добились компромисса между массой и мощностью. Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Они разместили на борту пчелы аккумулятор, электронику и солнечные батареи для подзарядки «на лету». Кроме того, была добавлена вторая пара крыльев. Это нужно для увеличения грузоподъемности робота. Новая версия весит около 259 мг.
Однако робот не приспособлен к работе в водной среде, как и третья версия не может работать автономно. Появится ли универсальная версия — открытый вопрос. Если получится, проект подойдет для разведки любых местностей и завалов.
В некоторых задачах важно, чтобы робот мог выдержать, например, удар мухобойкой.
DEAnsect, удар мухобойкой
На это способен эластичный робот DEAnsect, разработанный в 2019 году учеными из политехнического университета Лозанны. Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Вернее, инженеры выпустили две модели DEAnsect, одна из которых — эластичная.
Робот с аккумулятором, микросхемой и фотодиодами, благодаря которым он может двигаться по начерченному узору.
Движение DEAnsect по траектории. Источник
В автономном режиме DEAnsect 1* может работать до 14 минут. Длина робота составляет всего 40 мм, а масса — 190 мг.
DEAnsect 2* — более «живучая» модель, так как текстолитовое основание заменено на упругую диэлектрическую подложку. На робота можно даже наступить, и ему ничего не будет.
В основе устройства — искусственные мускулы из упругой диэлектрической мембраны (эластомера), которые заключены между парами гибких электродов.
Механизм движения ножки DEAnsect
При подаче напряжения на электроды проводники притягиваются и стягивают мембраны. В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
В результате мускулы вытягиваются и подтягивают за собой три ножки. При снятии напряжения мембраны возвращаются в исходное состояние, подтягивая уже тело к ножкам.
Толщина каждой из ножек не превышает 18 мкм. Это тоньше крыла стрекозы. Шаги у них соответствующие — всего 20 мкм.
Ученым удалось достичь скорости до 3 см/c. Для этого каждая ножка должна делать по 450 шагов в секунду.
В 2017 году группа исследователей из США и Китая представила робота, способного передвигаться под действием постоянного напряжения.
Робот всего 20 мм в длину, а его масса — 190 мг. Конструктивно он состоит из легкого пластикового корпуса, оснований из углеродного волокна, электродов, лапок, керамического конденсатора и консольной балки (проволоки).
Электроды, конденсатор и проволока нужны в механизме автоколебаний, который «заставляет» гусеницу двигаться.
К одному основанию прикреплена никель-титановая (NiTi) консольная балка (проволока), у нее есть свободные электроны. Сама проволока находится между электродными пластинами, которые заряжаются от конденсатора емкостью 10 нФ. Постепенно на электроды подается напряжение (3кВ) и пластины разноименно заряжаются.
Постепенно на электроды подается напряжение (3кВ) и пластины разноименно заряжаются.
Электростатическое поле между анодом и катодом. Источник
Между электродными пластинами возникает напряжение и электрическое поле, которое «перемещает» проволоку со свободными электронами в сторону положительно заряженной пластины.
Коснувшись пластины, проволока «передает» на нее свободные электроны. Суммарный заряд проволоки становится положительным, а заряд пластины — «более нейтральным».
Теперь проволока двигается уже в сторону отрицательно заряженной пластины. При соприкосновении происходит то же самое. Стоит отметить, что конденсатор разряжается и компенсирует «похищенные» заряды на электродных пластинах. В системе работает закон сохранения импульса. Когда проволока двигается, она изменяет суммарный импульс и отклоняет его от нуля.
Система стремится компенсировать отклонение, и робот начинает вращаться относительно задних ножек. Поворот происходит в стороны, противоположные направлениям движения проволоки. В результате гусеница движется по зигзагообразной траектории. Для наглядности покажем на схеме:
В результате гусеница движется по зигзагообразной траектории. Для наглядности покажем на схеме:
Робот может перемещаться со скоростью 2 мм/c в течение 10 секунд. Длительность жизненного цикла ограничивается лишь емкостью конденсатора. Если знаете менее массивные и более высокоемкие альтернативы керамического конденсатора — напишите в комментариях.
Предыдущие проекты сильно зависели от электричества. Альтернативу предлагают изобретатели из Лаборатории автономных роботов Университета Южной Калифорнии, которые изобрели RoBeetle.
Это робот-жук, способный передвигаться более двух часов без внешних источников питания. Кроме того, робот получился небольшим, с массой 88 мг и длиной 15 мм.
RooBeetle. Источник
Долгосрочной автономности ученые добились с помощью жидкого топлива на метаноле, который питает искусственные мышцы из никель-титана.У сплава есть память формы. Мускулы растягиваются при нагреве и стягиваются при охлаждении. Также на поверхность мускул нанесен тонкий слой никеля.
На верхней стороне жука расположены отверстия, через которые испаряется метанол. Пары метанола при взаимодействии с нанесенным никелем приводят к окислению и нагреву никель-титановых проволок.
В результате мышца растягивается, вместе с ней движутся передние ноги RoBeetle. Одновременно с этим закрываются отверстия, через которые испаряется метанол. Проволока прекращает нагреваться и остывает, а мышца сокращается в обратную сторону и подтягивает за собой ноги с корпусом.
Движение робо-жука
Несмотря на то, что мышца нагревается за секунду до 100 ºС, она быстро охлаждается из-за небольших габаритов. Получается, чем быстрее нагрев и охлаждение мускулов, тем больше скорость передвижения RoBeetle.
Полный отказ от электроники — это преимущество и проклятие RoBeetle. Пока непонятно, как управлять роботом. Он умеет двигаться только вперед. Однако может нести на своих лапках груз массой 229 мг. Напомним, что сам робот весит 88 мг.
RooBeetle переносит груз. Источник
Автор: Влад Ефименко
Источник: https://habr.com/
Воспользуйтесь нашими услугами
Насекомые вдохновляют на усовершенствования роботов
Насекомые вдохновляют на усовершенствования роботов
Скачать PDF
- ИНДЕКС ПРИРОДЫ
Беспозвоночные предлагают решения для создания микроботов размером с муху.
- Нил Сэвидж 0
Нил Сэвидж
Нил Сэвидж — писатель-фрилансер из Лоуэлла, штат Массачусетс.

Посмотреть публикации автора
Вы также можете искать этого автора в PubMed
Google ученый

У вас есть полный доступ к этой статье через ваше учреждение.
Скачать PDF
Скачать PDF
Сжимаемый робот с шарнирными механизмами, вдохновленный простотой насекомых. Предоставлено: Кошик Джаярам, Лаборатория движения и робототехники, вдохновленных животными
Человеческий мозг содержит впечатляющие 86 миллиардов нейронов, но насекомые обходятся гораздо меньшим количеством нейронов. Медоносная пчела управляет всем своим сложным поведением с помощью около 1 миллиона нейронов, а крошечная оса Megaphragma mymaripenne живет менее чем с 10 000 нейронов. Изучение того, как насекомые выполняют ключевые задачи, дает ученым представление о том, как роботы могут выполнять сложные действия с ограниченной вычислительной мощностью, указывая на возможность создания их в масштабе мух и тараканов.
Медоносная пчела управляет всем своим сложным поведением с помощью около 1 миллиона нейронов, а крошечная оса Megaphragma mymaripenne живет менее чем с 10 000 нейронов. Изучение того, как насекомые выполняют ключевые задачи, дает ученым представление о том, как роботы могут выполнять сложные действия с ограниченной вычислительной мощностью, указывая на возможность создания их в масштабе мух и тараканов.
Флот летающих роботов размером с комнатную муху может оказаться полезным для доставки датчиков в труднодоступные места, обеспечения удаленного осмотра внутри, скажем, трубопровода или сбора данных под пологом леса. Они также должны быть относительно безопасными для использования рядом с людьми из-за их веса. Самое главное, они представляют собой проблемы проектирования, на которых инженеры могут учиться, говорит Сойер Фуллер, инженер-механик, который руководит Лабораторией автономной робототехники насекомых в Вашингтонском университете в Сиэтле. «Можно многому научиться при проектировании роботов с экстремальными ограничениями масштаба», — говорит он. «Мы научимся делать эффективную авионику. Мы найдем новые способы создания механики. Это заставит нас быть ультраминиатюрными».
«Мы научимся делать эффективную авионику. Мы найдем новые способы создания механики. Это заставит нас быть ультраминиатюрными».
Nature Index 2022 ИИ и робототехника
В частности, поскольку робот размером с чешуйку насекомого может нести только около 100 милливатт энергии, его конструкция побуждает исследователей переосмыслить то, как включается интеллект. «Считается, что насекомые проще, чем позвоночные, поэтому, возможно, у них более простые механизмы обработки или интеллекта», — говорит Каушик Джаярам, робототехник, который руководит Лабораторией движения и робототехники, вдохновленной животными, в Университете Колорадо в Боулдере.
Одним из способов может быть перенос некоторых управляющих решений с процессоров на физический дизайн робота, по существу встраивая интеллект в тело. Например, Фуллер работал над летающим роботом, которому нужно было лететь против ветра. Обычный подход заключается в том, чтобы датчики определяли направление ветра до того, как центральный процессор направит машину. Фуллер обнаружил, что может просто добавить плавники к задней части робота, и то, как воздух обтекает их, автоматически поворачивает робота против ветра без каких-либо дополнительных датчиков.
Фуллер обнаружил, что может просто добавить плавники к задней части робота, и то, как воздух обтекает их, автоматически поворачивает робота против ветра без каких-либо дополнительных датчиков.
Имитация сенсорных систем насекомых также может повысить производительность без увеличения энергопотребления. В ходе испытаний в аэродинамической трубе Фуллер обнаружил, что мухи контролируют свою навигацию не только с помощью зрения, но и за счет ощущения воздушной скорости посредством давления ветра на их антенны. По его словам, сочетание различных датчиков с низким разрешением может быть более эффективным, чем попытка прикрепить сложную камеру к крошечному телу.
Кроме того, есть возможности, предлагаемые крошечными роботами, которые могут врезаться в объект без серьезных повреждений, потому что сила столкновения мала по сравнению с их механической прочностью. Джаярам пытается использовать этот принцип для имитации тараканов. Вместо того, чтобы замедляться при приближении к стене, тараканы врезаются в нее и используют силу, чтобы наклонить свое тело вверх, чтобы забраться. Джаярам продемонстрировал аналогичные способности на роботах-тараканах размером с ладонь, и он также надеется построить роботов размером с пенни, которые благодаря своей геометрии могут имитировать тараканов в том, как они сгибают свое тело, чтобы протискиваться через щели размером до 3 миллиметров.
Джаярам продемонстрировал аналогичные способности на роботах-тараканах размером с ладонь, и он также надеется построить роботов размером с пенни, которые благодаря своей геометрии могут имитировать тараканов в том, как они сгибают свое тело, чтобы протискиваться через щели размером до 3 миллиметров.
Фуллер работает над летающими роботами размером со шмеля, весом примерно с зубочистку, с крыльями из полиэфирной пленки, поддерживаемыми углеродными волокнами. Он говорит, что помимо того, что природа вдохновляет на определенные функциональные возможности, инженеры также могут научиться развивать свои механические конструкции и системы управления аналогично миру природы, настраивая каждую версию на основе успехов и неудач предыдущих итераций. Природа, по словам Фуллера, «развивает и тело, и систему управления одновременно. В инженерии вы узнаете, как спроектировать систему управления, или вы узнаете, как спроектировать хороший манипулятор робота. Но эта дисциплина делать и то, и другое одновременно не так уж распространена».
Джаярам тоже уверен, что выяснение того, как насекомые справляются с трудностями, поможет ученым найти решение. «По мере того, как мы начинаем создавать более сложную робототехнику, которая должна взаимодействовать с реальным миром, природа может стать мощным учителем».
Природа 610 , S18 (2022)
doi: https://doi.org/10.1038/d41586-022-03213-6
Эта статья является частью Nature Index 2022 AI and robotics, независимого от редакции приложения. Рекламодатели не имеют никакого влияния на содержание.
Использование ИИ и робототехники для науки и общества
Четыре способа, которыми искусственный интеллект и робототехника помогают трансформировать другие области исследований
Ускоряется рост исследований в области ИИ и робототехники
Заболевания рака, вызванные пандемией, лечатся с помощью инноваций ИИ
Сельские районы упускают возможности ИИ
Большие технологии истощают таланты ИИ из академических кругов?
Партнерский контент: ИИ помогает компьютерам лучше видеть и слышать
Контент для партнеров: гостеприимная экосистема исследований искусственного интеллекта в Канаде
Контент для партнеров: роботы TINY, вдохновленные насекомыми
Контент для партнеров: открытие новой эры разработки лекарств
Контент для партнеров: новый инструмент обещает более разумный подход к большим данным и искусственному интеллекту
Контент для партнеров: интеллектуальные роботы предлагают услуги с улыбкой
Партнерский контент: новая эра Гонконга, основанная на инновациях
Контент для партнеров: получение контроля над серийными искусственными мышцами с помощью инженерных инструментов управления
Контент для партнеров: план технологии интеллектуальной речи на базе искусственного интеллекта
Партнерский контент: все в интеллектуальном интеллекте
Партнерский контент: как искусственный интеллект может превращать мысли в действия
Контент для партнеров: стартап на базе искусственного интеллекта ускоряет открытие белков
Контент для партнеров: интеллектуальные технологии берутся за безопасность дронов
Субъекты
- Информатика
- Технологии
- Биомеханика
Последнее:
Работа
Факультет-биостатистик/эпидемиолог с опытом клинических испытаний
Клиника Кливленда
Кливленд, Огайо, США
Ассистент/доцент кафедры фармакологии и терапии
Университет Манитобы
Виннипег, Манитоба, Канада
Директор — Центр биоинженерии рака
Национальный институт рака NIH (NCI)
Фредерик, США
Должность постдока в области компьютерной геномики рака
Гарвардская медицинская школа (HMS)
Бостон, Массачусетс, США
Студенческий проект: Создание робота-насекомого
Опишите камни как ученый НАСА
Собери вездеход и многое другое с фигурами
Перейти к руководству для преподавателей
Когда инженеры НАСА проектируют роботов для экстремальных условий, они часто черпают вдохновение у насекомых! В этом задании вы обдумаете уникальные характеристики насекомых, такие как их крылья или усики, и нарисуете конструкцию робота-насекомого, способного справиться с уникальными задачами окружающей среды.
Материалы
Бумага
Ручки/карандаши или маркеры
(дополнительно) Рабочий лист робота-насекомого – Скачать PDF
1. Узнайте о насекомых и их строении
Что такое насекомое? Каковы его особенности и что они ему помогают? Узнайте, почему насекомые, которых мы видим вокруг себя каждый день, имеют разные особенности и какие функции выполняют эти функции. Тело насекомых состоит из трех основных частей:
- Голова с глазами, ртом и усиками
- Грудная клетка с ногами и/или крыльями
- Брюшко, содержащее их органы
Узнайте о других структурах насекомых и их назначении в таблице ниже.
The Structure of Insects
| Structure | Function |
| A hard exoskeleton or external skeleton | Protects and contains body structures inside |
| Three pairs of legs (6 legs ) | Locomotion/movement |
| Two antennae | Touch and sense of smell |
| One or two sets of wings | Flight |
| Compound eyes (honeycomb pattern) | Vision and movement detection |
+ Развернуть изображение
2.
 Узнайте, как насекомые и природа могут вдохновить на создание роботов
Узнайте, как насекомые и природа могут вдохновить на создание роботов
Наши пять чувств — зрение, обоняние, вкус, осязание и слух — предоставляют информацию об окружающем нас мире. Как робот может собирать информацию таким же образом, чтобы изучать среду, которую мы не можем посетить лично? Инженеры Лаборатории реактивного движения НАСА, или JPL, часто черпают вдохновение в природе при создании роботов. Некоторые из этих роботов даже летают в космос! Вот несколько примеров роботов, созданных в Лаборатории реактивного движения и НАСА и вдохновленных природой:
Роботы, вдохновленные природой
ЛЕМУР
Может взбираться по каменным стенам, цепляясь сотнями крошечных рыболовных крючков в каждом из 16 пальцев. Использует искусственный интеллект (ИИ), чтобы обойти препятствия.
› Подробнее
SpiderBot
Микроробот, предназначенный для картирования местности на других планетах и исследования более мелких тел, таких как кометы, астероиды или Луна.
› Подробнее
A-PUFFER
Складные роботы, которые могут исследовать области на Луне и собирать информацию о местах, которые астронавтам может быть трудно исследовать пешком, например, о труднодоступных кратерах и узких пещерах.
› Читать далее
ВОРОБЕЙ
Передвигается на пару и прыгает по ледяной местности, такой как на спутнике Юпитера Европе и спутнике Сатурна Энцеладе.
› Читать дальше
Geckobot
Система захвата, вдохновленная крошечными волосками на лапах геккона, позволяет этому роботу цепляться за вертикальные стены и другие поверхности.
› Подробнее
BRUIE
Этот робот, предназначенный для подводных исследований внеземных ледяных вод, использует свои два колеса, чтобы катиться по нижней стороне льдин, покрывающих водоемы.
› Подробнее
RoboSimian
Обезьяноподобный робот, способный реагировать на сценарии стихийных бедствий, слишком опасные для человека.
› Подробнее
Рои
Эта группа роботов вдохновлена тем, как муравьи работают вместе, чтобы обмениваться информацией.
› Подробнее
3. Создай собственного робота-насекомого
Теперь твоя очередь! Нарисуйте на листе бумаги схему робота-насекомого, способного противостоять марсианской среде. Проявите творческий подход, но не забудьте включить функции, которые позволят вашему роботу добиться успеха на Марсе. Ваше роботизированное насекомое должно иметь особенности и функции, позволяющие ему исследовать место, которое:
- Холодно, но много солнечного света.
- Множество камней, которые могут выступать в качестве препятствий, которые ваш робот должен разбить на части или объехать.
- Некоторые холмы и долины.
- Пыльно и ветрено. Иногда бывают пыльные бури.
- Дальние поездки. Много открытого пространства.
Узнайте больше о Марсе по ссылкам ниже, чтобы увидеть, что еще вы можете добавить к своему роботу-насекомому:
- Серия видеороликов «Марс в минутах»
- Прочтите все о Марсе
- Марс в фактах и цифрах
- NASA Mars Missions
Об изображении: Этот коллаж из изображений Марса, сделанных космическим кораблем НАСА, показывает (против часовой стрелки сверху):
- Фрагмент панорамы, сделанной марсоходом Curiosity на Марсе. Изображение предоставлено: NASA/JPL-Caltech/MSSS › Полное изображение и подпись
- Снимок, сделанный в 1979 году посадочным модулем «Викинг-2», на котором виден тонкий иней, окружающий посадочный модуль на Марсе. Изображение предоставлено: NASA/JPL-Caltech › Полное изображение и подпись
- Пылевой вихрь высотой 12 миль кружит над равнинами Марса на снимке, сделанном Марсианским разведывательным орбитальным аппаратом. Изображение предоставлено: NASA/JPL-Caltech/UA › Полное изображение и подпись
 Изображение предоставлено: NASA/JPL-Caltech/MSSS › Полное изображение и подпись
Изображение предоставлено: NASA/JPL-Caltech/MSSS › Полное изображение и подпись+ Развернуть изображение
4. Подумайте о своей конструкции
Как вы думаете, сработает ли ваша конструкция на Марсе и почему? Что бы вы могли изменить, если бы вместо этого проектировали робота для Земли?
Если ваши исследования показывают, что на Марсе бывают большие пыльные бури, которые могут столкнуться с роботами, работающими на солнечных батареях, или что камни в некоторых местах невероятно острые и могут серьезно повредить колеса вашего робота-насекомого (если они у него есть), не могли бы вы вернуться и что-то изменить?
Является ли природа хорошим источником вдохновения для создания космических кораблей и роботов?
Об изображении: Острые камни на Марсе повреждают колеса марсохода Curiosity. На этом снимке, сделанном марсоходом на Марсе в 2016 году, вы можете увидеть дыры и другие повреждения пары колес. После того, как инженеры НАСА заметили, что колеса Curiosity повреждаются, они изменили конструкцию колес, которые будут использоваться на следующем марсоходе. Марсоход Perseverance, чтобы сделать их крепче. › Узнайте больше о новом дизайне колес. Изображение предоставлено: NASA/JPL-Caltech/MSSS | + Развернуть изображение
На этом снимке, сделанном марсоходом на Марсе в 2016 году, вы можете увидеть дыры и другие повреждения пары колес. После того, как инженеры НАСА заметили, что колеса Curiosity повреждаются, они изменили конструкцию колес, которые будут использоваться на следующем марсоходе. Марсоход Perseverance, чтобы сделать их крепче. › Узнайте больше о новом дизайне колес. Изображение предоставлено: NASA/JPL-Caltech/MSSS | + Развернуть изображение
5. Запишите свои выводы
На рабочем листе робота-насекомого или на листе бумаги запишите следующую информацию о вашем роботе-насекомом:
- Имя вашего робота
- Особенности/структуры, которые вы включили в свой проект
- Функции/ Возможности вашего дизайна
- Элементы окружающей среды, для которых вы его разработали, и почему вы выбрали именно эти особенности
- Как ваш дизайн будет вести себя на Марсе? Удастся ли это?
- Вы бы вернулись и что-то изменили и почему?
- Как процесс проектирования вашего робота-насекомого имитировал процесс проектирования, который инженеры НАСА используют для создания роботов.
