Содержание
Как устроены современные роботы и как они помогают изучать мозг человека
Нейронауки и робототехника развиваются рука об руку. О том, как изучение мозга вдохновляет на создание роботов и наоборот, рассказал главный научный сотрудник Центра биоэлектрических интерфейсов НИУ ВШЭ Михаил Лебедев
Материал предоставлен РБК Трендам порталом HSE.RU.
Роботы интересны нейронаукам, а нейронауки интересны роботам — об этом была наша статья «Neuroengineering challenges of fusing robotics and neuroscience» в журнале Science Robotics. Такое совместное развитие способствует прогрессу в обеих отраслях, приближая нас к созданию более совершенных роботов-андроидов и к более глубокому пониманию устройства нашего мозга. А в какой-то степени — к объединению биологических организмов с машинами, к созданию кибернетических организмов (киборгов).
Нейронаука для роботов
По своему устройству роботы нередко копируют человека. Это касается той части роботов, которым важно имитировать человеческие действия и поведение — индустриальным машинам нейронауки не так важны.
Самое очевидное, что могут использовать при разработке робота — делать его внешне похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не обязательно с инженерной точки зрения. Особенно это важно в тех случаях, когда робот будет взаимодействовать с людьми — похожей на нас машине проще доверять.
Известный во всем мире робот Pepper из Японии — пример робота, внешне похожего на человека
(Фото: Unsplash)
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. Разрабатывая механизмы восприятия, обработки информации и управления, инженеры вдохновляются устройством нервной системы людей.
Например, глаза робота — телекамеры, которые могут двигаться в разных направлениях — имитируют зрительную систему человека. Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
У человека есть вестибулоокулярный рефлекс: глаза при перемещении стабилизируются с учетом вестибулярной информации, что позволяет сохранять стабильность картинки, которую мы видим. На теле робота также могут быть датчики ускорения и вертикализации. Они помогают роботу учитывать движения тела для стабилизации зрительного восприятия внешнего мира и совершенствования ловкости.
Кроме того, робот может ощущать точно так же, как человек — на роботе может быть кожа, он может чувствовать прикосновение. И тогда он не просто произвольно движется в пространстве: если он дотрагивается до препятствия, он его ощущает и реагирует так же, как человек. Он может использовать эту искусственную тактильную информацию и для схватывания предметов.
Тактильные сенсоры позволяют этой роботизированной руке манипулировать мелкими предметами, в том числе стеклянными шариками
У роботов можно имитировать даже болевые ощущения: какое-то прикосновение ощущается нормально, а какое-то вызывает боль, что в корне меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Не только сенсорные системы, но и управление своим телом у робота можно спроектировать по аналогии с человеком. У людей ходьбой управляют так называемые центральные генераторы ритма — специализированные нервные клетки, предназначенные для контроля автономной моторной активности. Есть роботы, в которых для управления ходьбой была использована та же идея.
Кроме того, роботы могут обучаться у людей. Робот может совершать действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за тем, как человек это делает, и пытаться повторить это движение. При совершении ошибок он сравнивает это с тем, как это же действие совершает человек.
Роботы для нейронауки
Как может использовать роботов нейронаука? Когда мы изготовляем модель биологической системы, мы начинаем лучше понимать, по каким принципам она работает. Поэтому создание механических и компьютерных моделей управления движениями нервной системой человека приближает нас к пониманию нервных функций и биомеханики.
Поэтому создание механических и компьютерных моделей управления движениями нервной системой человека приближает нас к пониманию нервных функций и биомеханики.
А наиболее перспективное направление использования роботов в современной нейронауке — это проектирование нейроинтерфейсов, систем для управления внешними устройствами с помощью сигналов мозга. Нейроинтерфейсы необходимы для разработки нейропротезов (например, искуственной руки для людей, лишившихся конечности) и экзоскелетов — внешних каркасов тела человека для увеличения его силы или восстановления утраченной двигательной способности.
Один из первых полноценных нейропротезов конечностей, созданный в Лаборатории прикладной физики Джонса Хопкинса, управляется при помощи электрических импульсов мозга
(Фото: youtube.com)
Робот может взаимодействовать с нервной системой через интерфейс в двух направлениях: нервная система может подавать командный сигнал роботу, в робот от своих сенсоров может подавать человеку сенсорную информацию, вызывая реальные ощущения — за счет стимуляции нервов, нервных окончаний кожи, или самой сенсорной коры мозга. Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.
Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.
Фото: Dan Hixson / University of Utah College of Engineering
Здесь возникает интересный вопрос — следует ли нам управлять через нейроинтерфейс всеми степенями свободы робота, то есть насколько конкретные команды мы должны ему посылать. Например, можно «приказать» роботизированной руке взять бутылку воды, а конкретные операции — опустить руку, повернуть ее, разжать и сжать пальцы — она совершит сама. Этот подход называется совмещенным контролем — через нейроинтерфейс мы даем простые команды, а специальный контроллер внутри робота выбирает наилучшую стратегию для реализации. Либо можно создать такой механизм, который не поймет команды «взять бутылку»: ему нужно посылать информацию о конкретных, детализированных движениях.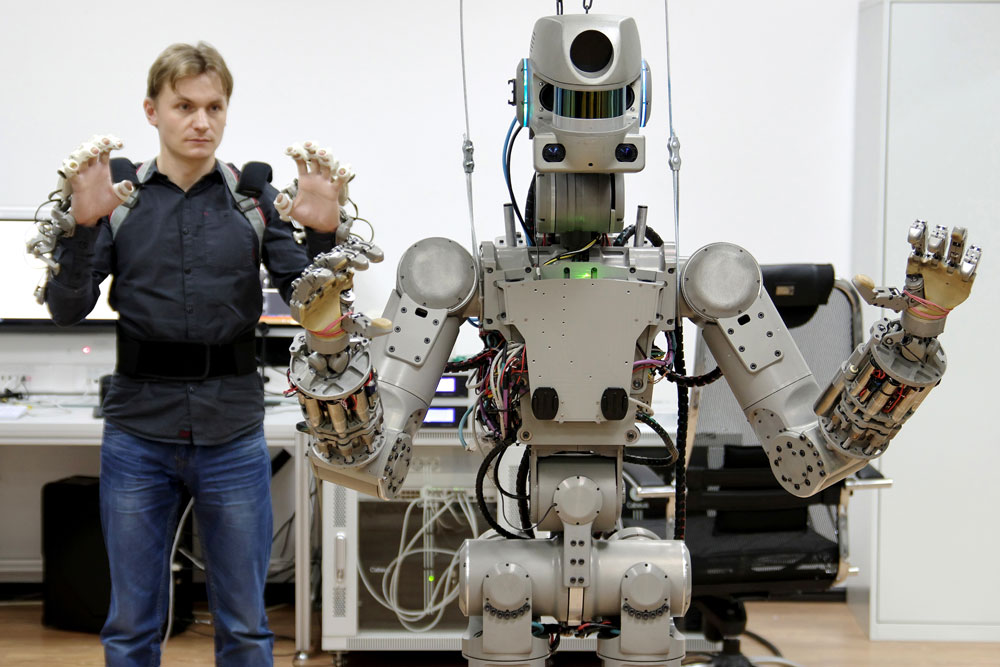
Современные исследования
Ученые в области нейронаук и робототехники изучают различные аспекты работы мозга и устройства роботов. Так, в университете Дьюк я проводил эксперименты с нейроинтерфейсами на обезьянах — так как для точной работы интерфейсов необходимо их прямое подключение к зонам мозга и не всегда такие экспериментальные вмешательства возможны на людях.
В одном из моих исследований обезьяна ходила по дорожке, активность ее моторной коры ее мозга, ответственной за движение ног, считывалась и запускала ходьбу робота. При этом обезьяна наблюдала этого ходящего робота на экране, который был перед ней расположен.
Обезьяна использовала обратную связь, то есть корректировала свои движения на основе того, что она видит на экране. Таким образом разрабатываются наиболее эффективные для реализации ходьбы нейроинтерфейсы.
Кибернетическое будущее
Подобные исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений у полностью парализованных людей уже не кажется недостижимой фантазией — необходимо только время. Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Коммерческая разработка таких систем идет по всему миру, в том числе и в России. Например, в известном проекте ExoAtlet разрабатывают экзоскелеты для реабилитации людей с двигательными нарушениями. Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.
Экзоскелеты компании ExoAtlet помогают встать на ноги людям с травмами спинного мозга, перенесенным инсультом и другими нарушениями
(Фото: ExoAtlet)
Быстрое развитие человекоподобных роботов-андроидов тоже становится реальностью. Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Очевидно, что мы будем видеть развитие и робототехники, и нейронаук, и эти области будут сближаться. Это не только открывает новые возможности, но и создает новые этические вопросы: как мы должны относиться к роботам-андроидам или людям-киборгам.
И все-таки пока человек лучше, чем робот, во многих отношениях. Наши мышцы наиболее экономичны: достаточно съесть бутерброд, чтобы хватило энергии на весь день. У робота заряд батарей закончится через полчаса. И хотя может быть гораздо мощнее, чем человек, он часто оказывается слишком тяжелым. Элегантность и оптимизация энергетических затрат — тут человек пока превосходит робота.
Хотя недалеко то будущее, когда это изменится — в этом направлении работают десятки тысяч талантливых ученых и инженеров.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
5 главных тенденций развития роботов на 2021 г. И тенденция, которой нет. Обзор: Промышленные роботы 2021
1. Роботы учатся новым трюкам
Программное обеспечение для искусственного интеллекта в сочетании со зрением и другими сенсорными системами позволяет роботам справляться со все более трудными задачами. Одна из таких задач — сбор мусора, задача простая для человека, но до недавнего времени доступная только ему. Новые поколения роботов проще устанавливать и программировать, и их можно подключать к интернету. Благодаря достижениям в области коммуникационных технологий, современные роботы интегрируются в стратегии автоматизации и Индустрии 4.0.
2. Роботы работают на умных фабриках
Автомобильная промышленность первой использовала интеллектуальные производственные решения с использованием промышленных роботов на конвейерных сборочных линиях, которые доминируют в традиционном автомобильном производстве более сотни лет.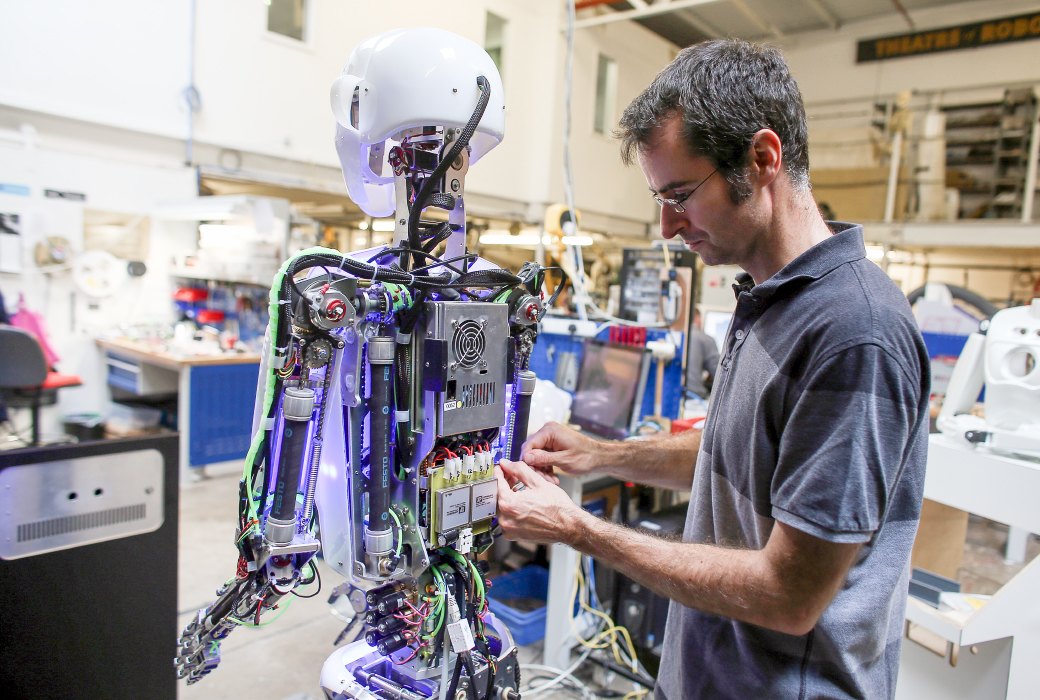 Будущее принадлежит системам, объединяющих в сеть промышленных и транспортных роботов. Последние — это автономные мобильные роботы (Autonomous mobile robots, AMR), оснащенные навигационными системами. Взаимодействие двух видов роботов делает процесс производства намного более гибким по сравнению с традиционным. Например, кузова автомобилей перевозятся на беспилотных роботизированных транспортных системах и при необходимости некоторые из них могут быть отделены от общего потока, поступающего на сборочные линии и перенаправлены на специализированные станции для сборки «под заказ».
Будущее принадлежит системам, объединяющих в сеть промышленных и транспортных роботов. Последние — это автономные мобильные роботы (Autonomous mobile robots, AMR), оснащенные навигационными системами. Взаимодействие двух видов роботов делает процесс производства намного более гибким по сравнению с традиционным. Например, кузова автомобилей перевозятся на беспилотных роботизированных транспортных системах и при необходимости некоторые из них могут быть отделены от общего потока, поступающего на сборочные линии и перенаправлены на специализированные станции для сборки «под заказ».
«Традиционный» робот, установленный на автономном мобильном роботе, способен решать новые задачи
Когда собираемые модели меняются, необходимо только перепрограммировать роботов и AMR, а не демонтировать всю производственную линию.
3. Роботы выходят на новые рынки
Прорыв в области подключения способствует более широкому внедрению роботов в производственных секторах, которые относительно недавно обратились к автоматизации, таких как производство продуктов питания, текстильная промышленность, изготовление изделий из дерева и пластмассы. Продолжающаяся цифровая трансформация приведет к появлению совершенно новых бизнес-моделей, поскольку производителям будет легче диверсифицироваться, чем когда-либо. На умном заводе на одной и той же роботизированной линии можно будет собирать различные изделия. «Традиционной производственной линии больше не существует» — уверяют в IFR.
Продолжающаяся цифровая трансформация приведет к появлению совершенно новых бизнес-моделей, поскольку производителям будет легче диверсифицироваться, чем когда-либо. На умном заводе на одной и той же роботизированной линии можно будет собирать различные изделия. «Традиционной производственной линии больше не существует» — уверяют в IFR.
4. Роботы сокращают углеродный след
Инвестиции в современные технологии роботов также будут обусловлены требованием уменьшения выбросов углекислого газа. Современные роботы энергоэффективны, что напрямую снижает энергопотребление производства. Благодаря более высокой точности они также производят меньше брака и некачественной продукции, что положительно сказывается на соотношении вводимых ресурсов к выпускаемым. Кроме того, роботы увеличивают рентабельность производстве оборудования для использования возобновляемых источников энергии, например фотоэлектрических или водородных топливных элементов.
5. Роботы помогают обезопасить цепочки поставок в кризисных условиях
Ситуация с пандемией сделала очевидной слабость глобализированных цепочек поставок. Люди, в очередной раз, оказались «слабым звеном» цепочки, что заставило многих предпринимателей еще раз задуматься над внедрением роботов.
Люди, в очередной раз, оказались «слабым звеном» цепочки, что заставило многих предпринимателей еще раз задуматься над внедрением роботов.
Также IFR указывает, что «когда производительность труда выравнивается за счет автоматизации, производители получают повышенную гибкость, которая, возможно, была недоступна в странах с высокой заработной платой, таких как большинство стран Европейского Союза, Северная Америка, Япония или Южная Корея. Роботизированная автоматизация обеспечивает производительность, гибкость и безопасность».
Роботизированные системы заменят «слабое звено» производственного процесса
Иначе говоря, IFR намекает, что производство может вернуться в развитые страны… ценой оставшихся рабочих мест для людей.
«Пандемия COVID-19 не привела к появлению каких-либо новых тенденций, но она ускорила использование робототехники за пределами устоявшейся практики, — подвела итоги года в своей области Сюзанна Биллер (Susanne Bieller), генеральный секретарь IFR. — В этом отношении пандемия оказалась самой большой движущей силой изменений в отрасли».
— В этом отношении пандемия оказалась самой большой движущей силой изменений в отрасли».
Тенденция, которой нет
Что бросается в глаза — отсутствие в числе трендов развития промышленных роботов внедрения искусственного интеллекта и даже каких-либо упоминаний об ИИ. Роботов, что конвейерных, что мобильных, предлагается программировать и перепрограммировать, но не наделять их «свободой воли». При том, что вполне обсуждается внедрение ИИ не только в роботов для доставки пиццы, но и в роботизированные системы вооружения. А вот промышленники — не рискуют, что, наверное, показательно.
Полная история и будущее роботов
Современные роботы мало чем отличаются от малышей: забавно наблюдать, как они падают, но в глубине души мы знаем, что если смеяться слишком сильно, у них может развиться комплекс, и они вырастут, чтобы начать Третью мировую войну. . Ни одно из творений человечества не вызывает такой запутанной смеси благоговения, восхищения и страха: мы хотим, чтобы роботы сделали нашу жизнь проще и безопаснее, но не можем заставить себя полностью им доверять. Мы создаем их по своему образу и подобию, но боимся, что они вытеснят нас.
Мы создаем их по своему образу и подобию, но боимся, что они вытеснят нас.
Но этот трепет не помеха бурно развивающейся области робототехники. Роботы, наконец, стали достаточно умными и физически способными, чтобы выходить из фабрик и лабораторий, чтобы ходить, кататься и даже прыгать среди нас. Машины прибыли.
Возможно, вы беспокоитесь, что робот украдет вашу работу, и мы это понимаем. Это ведь капитализм, и автоматизация неизбежна. Но вы, скорее всего, будете работать с вместе с роботом в ближайшем будущем, чем один заменит вас. И еще лучшая новость: у вас больше шансов подружиться с роботом, чем заставить его убить вас. Ура на будущее!
История роботов
Определение «робот» с самого начала вводило в заблуждение. Слово впервые появилось в 1921 году в пьесе Карела Чапека « рублей». , или Универсальные роботы Россум. «Робот» происходит от чешского «принудительный труд». Однако эти роботы были роботами больше по духу, чем по форме. Они выглядели как люди, но были сделаны не из металла, а из химического теста. Роботы были намного эффективнее своих человеческих собратьев, а также гораздо более склонны к убийствам — в конце концов они начали убивать.
Роботы были намного эффективнее своих человеческих собратьев, а также гораздо более склонны к убийствам — в конце концов они начали убивать.
руб. установит образ Машины, которой нельзя доверять (например, Терминатор , Степфордские жены , Бегущий по лезвию и т. д.), который существует и по сей день, что не означает, что поп-культура не встала дружелюбнее роботов. Вспомните Рози из The Jetsons . (Возмутительно, конечно, но уж точно не убийца.) И это не может быть более дружелюбным к семье, чем Робин Уильямс в роли Двухсотлетнего Человека .
Реальное определение «робота» такое же скользкое, как и его вымышленные изображения. Спросите 10 робототехников, и вы получите 10 ответов — например, насколько автономным он должен быть. Но они сходятся в некоторых общих принципах: робот — это разумная, физически воплощенная машина. Робот может выполнять задачи автономно до некоторой степени. И робот может ощущать окружающую среду и управлять ею.
Подумайте о простом дроне, которым вы управляете. Это не робот. Но дайте дрону возможность взлетать и приземляться самостоятельно и ощущать объекты, и внезапно он станет намного более похожим на робота. Ключевыми являются интеллект, сенсорика и автономия.
Но только в 1960-х компания создала что-то, что начало соответствовать этим принципам. Именно тогда SRI International в Силиконовой долине разработала Shakey, первого по-настоящему мобильного и восприимчивого робота. Эта башня на колесах была хорошо названа — неуклюжая, медленная, дерганая. Оснащенный камерой и датчиками ударов, Шаки мог ориентироваться в сложной среде. Это не выглядело особенно уверенно, но это было начало роботизированной революции.
Примерно в то время, когда Шейки дрожал от страха, роботы-манипуляторы начали трансформировать производство. Первой среди них была компания Unimate, занимавшаяся сваркой кузовов автомобилей. Сегодня его потомки управляют автомобильными заводами, выполняя утомительные и опасные задачи с гораздо большей точностью и скоростью, чем любой человек. Несмотря на то, что они застряли на месте, они по-прежнему очень подходят под наше определение робота — это разумные машины, которые чувствуют окружающую среду и манипулируют ей.
Несмотря на то, что они застряли на месте, они по-прежнему очень подходят под наше определение робота — это разумные машины, которые чувствуют окружающую среду и манипулируют ей.
Роботы, тем не менее, оставались в основном ограниченными фабриками и лабораториями, где они либо катались, либо застревали на месте, поднимая предметы. Затем, в середине 19В 80-х Honda запустила программу гуманоидной робототехники. Он разработал P3, который мог чертовски хорошо ходить, а также махать и пожимать руки, к большому удовольствию комнаты, полной костюмов. Кульминацией работы станет Азимо, знаменитый двуногий, который однажды попытался сразить президента Обаму ударом футбольного мяча. (Хорошо, возможно, это было более невинно.)
Сегодня продвинутые роботы появляются повсюду . За это вы можете поблагодарить, в частности, три технологии: датчики, приводы и ИИ.
Итак, датчики. Машины, которые катаются по тротуарам, чтобы доставить фалафель, могут перемещаться по нашему миру во многом благодаря Darpa Grand Challenge 2004 года, в котором команды робототехников собрали беспилотные автомобили для гонок по пустыне. Их секрет? Лидар, который стреляет лазерами для построения трехмерной карты мира. Последовавшая за этим гонка частного сектора по разработке беспилотных автомобилей резко снизила стоимость лидара до такой степени, что инженеры могут создавать чувствительных роботов по (относительной) дешевизне.
Их секрет? Лидар, который стреляет лазерами для построения трехмерной карты мира. Последовавшая за этим гонка частного сектора по разработке беспилотных автомобилей резко снизила стоимость лидара до такой степени, что инженеры могут создавать чувствительных роботов по (относительной) дешевизне.
Как разрабатываются современные роботы
НИУ ВШЭ
Кредит: общественное достояние CC0
Сегодня нейробиология и робототехника развиваются рука об руку. О том, как изучение мозга вдохновляет на разработку роботов, рассказал научный руководитель Центра биоэлектрических интерфейсов НИУ ВШЭ Михаил Лебедев.
Роботы интересны нейробиологии, а нейробиология интересна роботам — это тема статьи «Нейроинженерные проблемы слияния робототехники и нейробиологии» в Science Robotics . Такая совместная разработка способствует прогрессу в обеих областях, приближая нас к разработке более совершенных роботов-андроидов и более глубокому пониманию структуры человеческого мозга. И в какой-то мере к объединению биологических организмов с машинами для создания кибернетических организмов (киборгов).
И в какой-то мере к объединению биологических организмов с машинами для создания кибернетических организмов (киборгов).
Нейронаука для роботов
Роботы часто напоминают людей по своему внешнему виду. Это верно для роботов, которые предназначены для имитации действий и поведения человека — нейронаука менее важна для промышленных машин.
Самое очевидное, что можно использовать при разработке робота, — это сделать его похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не нужно с инженерной точки зрения. Это особенно важно, когда робот будет взаимодействовать с людьми — машине, похожей на нас, доверять легче.
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. При разработке механизмов восприятия, обработки информации и управления инженеры вдохновляются структурой нервной системы человека.
Например, глаза робота — телекамеры, которые могут двигаться по разным осям — имитируют зрительную систему человека. Основываясь на знаниях о том, как устроено человеческое зрение и как обрабатывается визуальный сигнал, инженеры проектируют датчики робота по тем же принципам. Таким образом, робот может быть наделен человеческой способностью видеть мир, например, в трех измерениях.
Основываясь на знаниях о том, как устроено человеческое зрение и как обрабатывается визуальный сигнал, инженеры проектируют датчики робота по тем же принципам. Таким образом, робот может быть наделен человеческой способностью видеть мир, например, в трех измерениях.
У людей есть вестибуло-окулярный рефлекс: глаза применяют стабилизацию, используя вестибулярную информацию, когда мы движемся, что позволяет нам сохранять стабильность картинки, которую мы видим. На корпусе робота также могут быть датчики ускорения и ориентации. Они помогают роботу учитывать движения тела, чтобы стабилизировать визуальное восприятие внешнего мира и улучшить маневренность.
Кроме того, робот может ощущать осязание так же, как человек — у робота может быть кожа, он может чувствовать прикосновение. И тогда он не просто хаотично перемещается в пространстве: если он касается препятствия, он его чувствует и реагирует на него так же, как и человек. Он также может использовать эту искусственную тактильную информацию для захвата объектов.
Роботы могут даже имитировать болевые ощущения: некоторые формы физического контакта воспринимаются нормально, а некоторые вызывают боль, что резко меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, т. е. учится — как ребенок, которого впервые обожгли чем-то горячим.
Не только сенсорные системы, но и управление телом робота можно сконструировать аналогично человеческому. У человека ходьба контролируется так называемыми центральными генераторами ритма — специализированными нервными клетками, предназначенными для управления автономной двигательной активностью. Есть роботы, в которых та же идея используется для управления ходьбой.
Кроме того, роботы могут учиться у людей. Робот может выполнять действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за человеком и пытаться повторить его движения. Когда он ошибается, он сравнивает себя с тем, как человек выполняет то же действие.
Роботы для нейробиологии
Как нейробиология может использовать роботов? Когда мы строим модель биологической системы, мы начинаем лучше понимать принципы, по которым она работает. Таким образом, разработка механических и компьютерных моделей управления движениями нервной системы человека приближает нас к пониманию неврологических функций и биомеханики.
Таким образом, разработка механических и компьютерных моделей управления движениями нервной системы человека приближает нас к пониманию неврологических функций и биомеханики.
А наиболее перспективной областью применения роботов в современной нейробиологии является разработка нейроинтерфейсов — систем для управления внешними устройствами с помощью сигналов мозга. Нейроинтерфейсы необходимы для разработки нейропротезов (например, искусственной руки для людей, потерявших конечность) и экзоскелетов — внешних каркасов или каркасов человеческого тела для увеличения его прочности или восстановления утраченных двигательных способностей.
Робот может взаимодействовать с нервной системой через двунаправленный интерфейс: нервная система может посылать роботу командный сигнал, а робот от своих сенсоров может возвращать сенсорную информацию человеку, вызывая реальные ощущения путем стимуляции нервов, нервных окончаний в коже или самой сенсорной коре. Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечности, поскольку именно на основе сенсорной информации, получаемой от рук и ног, мы корректируем свои движения.
Они также необходимы для более точных движений роботизированной конечности, поскольку именно на основе сенсорной информации, получаемой от рук и ног, мы корректируем свои движения.
Здесь возникает интересный вопрос: Должны ли мы управлять всеми степенями свободы робота через нейроинтерфейс? Другими словами, как мы должны отправлять ему определенные команды? Например, мы можем «приказать» роботизированной руке взять бутылку с водой, и она будет выполнять определенные действия: опускать руку, поворачивать ее, разжимать и сжимать пальцы на руке — и все это самостоятельно. Такой подход называется комбинированным управлением — мы даем простые команды через нейроинтерфейс, а специальный контроллер внутри робота выбирает лучшую стратегию для реализации. Или мы можем создать механизм, который не будет понимать команду «возьми бутылку»: ему нужно передавать информацию о конкретных, детальных движениях.
Текущие исследования
Нейробиологи и ученые-роботы изучают различные аспекты работы мозга и роботизированных устройств. Например, в Университете Дьюка я проводил эксперименты с нейронными интерфейсами на обезьянах, так как интерфейсы должны быть напрямую связаны с областями мозга, чтобы они работали точно, а такие экспериментальные вмешательства не всегда можно проводить на людях.
Например, в Университете Дьюка я проводил эксперименты с нейронными интерфейсами на обезьянах, так как интерфейсы должны быть напрямую связаны с областями мозга, чтобы они работали точно, а такие экспериментальные вмешательства не всегда можно проводить на людях.
В одном из моих исследований обезьяна шла по дорожке, и активность ее моторной коры, отвечающей за движение ног, считывалась и запускала робота, чтобы он начал идти. В то же время обезьяна наблюдала за ходячим роботом на экране, расположенном перед ней.
Обезьяна использовала обратную связь, поэтому она корректировала свои движения в зависимости от того, что видела на экране. Так разрабатываются наиболее эффективные нейроинтерфейсы для реализации ходьбы.
Кибернетическое будущее
Такие исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений полностью парализованных людей уже не кажется недостижимой фантастикой — просто нужно время. Прогресс может сдерживаться нехваткой вычислительной мощности, но развитие за последние десять лет и здесь было колоссальным. Вполне вероятно, что вскоре мы увидим, как люди вокруг нас передвигаются с помощью легких, удобных экзоскелетов, а не инвалидных колясок или колясок. Человеческие киборги станут обычным явлением.
Прогресс может сдерживаться нехваткой вычислительной мощности, но развитие за последние десять лет и здесь было колоссальным. Вполне вероятно, что вскоре мы увидим, как люди вокруг нас передвигаются с помощью легких, удобных экзоскелетов, а не инвалидных колясок или колясок. Человеческие киборги станут обычным явлением.
Коммерческая разработка таких систем ведется во всем мире, в том числе и в России. Например, известный проект «ЭкзоАтлет» занимается разработкой экзоскелетов для реабилитации людей с двигательными нарушениями. В разработке алгоритмов для этих машин участвовал Центр биоэлектрических интерфейсов НИУ ВШЭ: руководитель центра, профессор Алексей Осадчий и его докторанты разработали нейроинтерфейс, запускающий шагающие движения экзоскелета.
Стремительное развитие человекоподобных роботов также становится реальностью. Вполне вероятно, что скоро у нас появятся роботы, которые будут ходить и подражать нам во многих отношениях — двигаться, как мы, и думать, как мы. Они смогут выполнять часть работы, ранее доступной только людям.
Они смогут выполнять часть работы, ранее доступной только людям.
Очевидно, мы увидим развитие как робототехники, так и нейронауки, и эти области сойдутся. Это не только открывает новые возможности, но и создает новые этические вопросы, например, как мы должны относиться к роботам-андроидам или людям-киборгам.
И все же пока что люди во многих отношениях лучше роботов. Наши мышцы самые экономные: съешьте бутерброд, и вам хватит энергии на весь день. У робота разрядится батарея через полчаса. И хотя он может быть намного сильнее человека, он часто слишком тяжел. Что касается элегантности и оптимизации энергоемкости, то пока что человек превосходит робота.
В ближайшем будущем это изменится — над этой целью работают десятки тысяч талантливых ученых и инженеров.
Дополнительная информация:
Гордон Ченг и др. Нейроинженерные проблемы слияния робототехники и нейронауки, Science Robotics (2020).