Содержание
DIY автономный дрон с управлением через интернет / Хабр
Сначала я написал длинное предисловие откуда взялась такая задача, а потом оно мне показалось скучным и я его удалил.
Итак, задача: создание автономного БПЛА для мониторинга состояния линий электропередач (ЛЭП).
Так как:
- это хобби-проект и я могу сильно ошибаться в расчетах
- летающие предметы представляют опасность для живых существ и их имущества,
то эту статью следует воспринимать только как расширяющую кругозор, а не руководство к действию.
Список дефектов для обнаружения на ЛЭП.
Требования к БПЛА
- Вертикальный взлет и посадка (без катапульт и парашютов), то есть коптер
- Умеет взлетать, лететь по заданным точкам, возвращаться обратно и садиться в автоматическом режиме
- Редактировать полетное задание, давать команду на взлет и на посадку можно из любой точки мира
- Трансляция телеметрии и видео в реальном времени через интернет
- Загрузка на сервер фото и видео с бортовой камеры в процессе или после полета
- Зарядка или механизированная замена аккумулятора без участия человека.


А также два противоречащих друг другу требования:
- Надежная электроника (если где-то упадет, считай потерял)
- Относительно низкая стоимость эксперимента (если где-то упадет, считай потерял)
Степень автономности в идеале хочется фантастическую: дрон сам летает по заранее спланированному маршруту, загружает фото на сервер, ПО на сервере выявляет дефекты по фото и формирует заявку ремонтной бригаде с координатами мест проведения работ. Сам дрон не должен требовать к себе внимания человека до окончания рабочего ресурса какой-нибудь детали, например, аккумулятора или подшипников.
Понятно, что эта задача не на один год, но я начну, а кто-нибудь, может быть, подхватит и продолжит.
Для примера, готовые промышленные варианты автономных комплексов: раз, два, три, четыре, пять, шесть, семь, восемь, девять, десять, одиннадцать, двенадцать, тринадцать, четырнадцать. Я всем написал запросы как потенциальный покупатель, чтобы узнать цены. Из них готовых к продаже: 2; готовых к продаже в Россию: 0.
Я всем написал запросы как потенциальный покупатель, чтобы узнать цены. Из них готовых к продаже: 2; готовых к продаже в Россию: 0.
Выбор полетного контроллера
Так как мне нужно транслировать видео и телеметрию через интернет, то сразу приходит на ум поставить на дрон микрокомпьютер с 4G модемом и камерой, и сделать из этого комплекта web-трансляцию. Нашлись вот такие решения: раз, два, три. Это обычные одноплатники с внешним USB 4G модемом и камерой. Для кодирования и трансляции видео используется gstreamer. Но эти штуки сами по себе дроном управлять не умеют, их нужно использовать совместно с полетным контроллером.
Полетный контроллер — это мозг дрона. Он следит за состоянием датчиков положения (гироскоп, акселерометр, компас), GPS-координатами, положением ручек на пульте управления и, исходя из этих данных, управляет моторами, чтобы висеть в одной точке или куда-то лететь. Полетный контроллер нужно будет как-то связать с бортовым компьютером, чтобы можно было загрузить полетное задание или указать произвольную точку куда лететь и когда включать камеру.
В продаже можно найти много разных контроллеров сильно отличающихся друг от друга по цене и функционалу. Какие-то из них работают на своем родном ПО, а какие-то используют open-source ПО, такое как Ardupilot и его форк PX4.
С Ardupilot я игрался еще на 8-битных атмегах, в которых не было USB-bootloader’а, а прошивались они на программаторе. С тех пор с ним не сталкивался и был приятно удивлен, когда узнал, что сейчас он может работать на 64-битных компьютерах с Linux, у него огромное сообщество пользователей как хобби, так и профи, длинный список поддерживаемых “из коробки” датчиков и расписанные планы на 2018-2019 годы. За это время он успел перерасти в проект DroneCode, а потом и отсоединиться от него.
На первый взгляд в нем как раз реализованы все необходимые функции: автоматический взлет и посадка, загрузка полетных заданий, есть desktop и мобильные приложения под все основные семейства ОС. Программы управления (GCS — Ground Control Station) общаются с бортовым контроллером короткими сообщениями по открытому протоколу MAVLink через комплект радиомодемов (дрон шлет телеметрию, GCS шлет команды управления). Подозреваю, что эти сообщения получится пустить через интернет.
Подозреваю, что эти сообщения получится пустить через интернет.
Взглянем на список поддерживаемых контроллеров и что-нибудь подберем. Вариантов там полтора десятка от мала до велика и с разными характеристиками.
Из всего того многообразия контроллеров мне понравилось несколько вариантов:
| Полетный контроллер | Erle PXFMini | Emlid Edge | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Доп компьютер | Raspberry Pi Zero W | нет | Raspberry Pi 3 | нет | Raspberry Pi 3 |
|
| |||||
| Вес комплекта, г | 84 | 97 | 98 | 145 | 150 |
| Процессоры, общее кол-во | 1 | 2 | 2 | 1 | 3 |
| ОС, одновременно работающих | 1 | 1 | 1 | 1 | 2 |
| IMU датчики, комплектов | 1 | 2 | 2 | 1 | 3 |
| Датчик воздушного давления | 1 | 2 | 1 | 1 | 1 |
| Резервирование питания | нет | 2х | 3х | нет | 2х |
| GPS, Глонасс | внешний модуль с доп магнитометром | внешний модуль с доп магнитометром | встроенный приемник, внешняя антенна | внешний модуль с доп магнитометром | внешний модуль |
| Видеовход | CSI на Raspberry | HDMI | CSI на Raspberry | CSI | CSI на Raspberry |
| WiFi | есть | есть Long Range 2км +52 г | есть | есть | есть |
|
| |||||
| Стоимость комплекта, $ | 212 | 700 | 215 | 341 | 331 |
Самый легкий комплект (84 г) получается из микрокомпьютера Raspberry Pi Zero W (9 г), контроллера Erle PXFMini (15 г), родного внешнего GNSS модуля (46 г) и дополнительного USB-концентратора (14 г).
Рабочий процессор в этом комплекте один — на Raspberry Pi. На нем висит управление ШИМ регуляторов моторов, считывание показаний датчиков, ОС Linux со всеми потрохами и декодирование видео с камеры. Так как в Pi Zero не предусмотрены USB порты, то в этом варианте приходится использовать внешний концентратор. IMU датчики и вход питания без резервирования.
Следующий комплект (97 г) от гонконгской компании с русскими фамилиями в команде разработчиков — контроллер Emlid Edge (59 г) с GNSS модулем (38 г). GNSS модуль работает по протоколу UAVCAN и дополнительно оснащен магнитометром и датчиком воздушного давления. За ШИМ здесь отвечает отдельный процессор ARM Cortex-M3, ОС Linux крутится на основном ARM Cortex-A53 quad-core.
В контроллере имеется HDMI видеовход, что позволяет подключить к нему напрямую любую камеру с таким выходом, например GoPro 4 или 5. Относительно высокая стоимость объясняется дальнобойными wifi-приемопередатчиками в комплекте (до 2 км с трансляцией HD-видео). Вес бортового модуля (52 г) в общей таблице не включен, так как мне нужна связь по 4G, однако такой вариант можно иметь в виду: из дальнобойного wifi можно сделать запасной канал связи через стационарный роутер с проводным интернетом.
Вес бортового модуля (52 г) в общей таблице не включен, так как мне нужна связь по 4G, однако такой вариант можно иметь в виду: из дальнобойного wifi можно сделать запасной канал связи через стационарный роутер с проводным интернетом.
Следующий вариант (98 г) состоит из знаменитого микрокомпьютера Raspberry Pi 3 (45 г) с контроллером-шилдом Navio 2 (23 г) от той же Emlid и внешней GNSS-антенны (30 г). На контроллере стоит отдельный процессор Cortex-M3 для управления ШИМ на 14 каналах и расшифровки входящих SBUS и PPM сигналов от приемника. Он, в свою очередь, управляется через драйвер в ядре ОС Linux, которая крутится на Raspberry.
Контроллер оснащен парой раздельных IMU датчиков (акселерометр, гироскоп, магнитометр) MPU9250 и LSM9DS1, одним датчиком воздушного давления и GNSS-модулем U-blox NEO-M8N, который видит GPS, Глонасс и BeiDou с внешней антенной через разъем MCX.
Запитывать этот “пирог” от 5 вольт можно одновременно с трех сторон, которые работают как дублирующие друг друга независимые источники: основной разъем питания на шилде, PWM серво выходы, micro-USB на Raspberry.
Контроллер Erle Brain 3 (100 г) с внешним GPS модулем (45 г) по своим весу, цене и набору датчиков смотрится в таблице так, что даже фото сюда вставлять не буду.
Далее у нас самый надежный и самый тяжелый комплект (150 г), который состоит из популярного полетного контроллера PixHawk 2 Cube (80 г) с открытой архитектурой и компьютера Raspberry Pi 3. Вместо Raspberry в этом случае можно использовать любой легкий одноплатник, например, Odroid XU4, NVIDIA Jetson или любой другой с нужными интерфейсами и подходящим весом.
В самом PixHawk установлено 2 процессора: первый 32-битный STM32F427 Cortex M4 — основной, на котором работает ОС реального времени (RTOS) NuttX и второй резервный (failsafe) 32-битный STM32F103. Контроллер сделан в виде модулей: в кубе установлены процессоры и датчики IMU (на антивибрационном креплении, да еще и с подогревом), а на основу выведены питание и разъемы на всю периферию. Предполагается, что основы могут быть разными и все желающие могут разработать свою собственную под специфические требования, на которую можно потом поставить готовый куб. Есть, кстати, готовый вариант с разъемом под установку микрокомпьютера Intel Edison. Но, так как, Intel больше эти компьютеры не выпускает, то и в этом комплекте в качестве бортового компьютера будет Raspberry.
Есть, кстати, готовый вариант с разъемом под установку микрокомпьютера Intel Edison. Но, так как, Intel больше эти компьютеры не выпускает, то и в этом комплекте в качестве бортового компьютера будет Raspberry.
Raspberry используется как дополнительный компьютер для связи с интернетом и на нем можно запускать любые ресурсоемкие задачи (например, распознавание образов в OpenCV), не боясь, что сбои в таком процессе “повесят” критичные функции, такие как управление моторами.
Итак, учитывая вес, характеристики и цену на первое место для меня выходит комплект Navio 2 + Raspberry, а на второе Pixhawk 2 Cube + Raspberry (+52 г). Вот, если бы под Pixhawk была основа в разъемом для маленького Raspberry Zero, да еще и выводом USB, то было бы интересней. Но такую еще купить нельзя, а изготавливать ее пока не интересно.
Запишу в заметки, что повышенная надежность стоит дополнительные 52 грамма и $110. По общему итогу расчетов эти цифры могут оказаться незначительными.
Автономная зарядка
Как можно видеть в готовых вариантах выше, существует несколько подходов к подготовке автономного дрона к следующему полету: зарядка аккумулятора через контактные площадки, бесконтактная индукционная зарядка и механизированная замена аккумулятора с последующей его зарядкой на станции.
У каждого метода есть свои плюсы и минусы, о них я напишу отдельно, но в любом случае, для их функционирования дрон должен уметь приземляться в нужную точку практически с сантиметровой точностью.
Посадка “в точку”
Для точной посадки можно использовать стандартную камеру бортового компьютера, визуальные маркеры и OpenCV для их распознавания. Вот один из вариантов решения, который можно нагуглить. Еще один свежий появился, когда я писал эту статью. Но распознавание образов достаточно трудоемкий процесс для Raspberry, и без особой необходимости загружать его не хочется. Также качество распознавания будет сильно зависеть от материала из чего сделан маркер и условий освещенности. Желательно, чтобы это был отдельный датчик и отдавал готовые координаты нужной визуальной точки, независимо от наличия и угла падения света. И такой есть в списке поддерживаемого оборудования Ardupilot, называется IR-Lock.
Airobotics из списка выше также использует это решение. Он сделан на основе модуля камеры с открытым кодом Pixy CMUcam5. Этот модуль снабжен камерой и процессором, и его можно “научить” распознавать определенные образы объектов, а, затем, на выходе получать готовые координаты этих объектов на изображении.
Зная координаты распознанного образа на изображении и расстояние до него, полетный контроллер вычисляет на какое расстояние и в какую сторону нужно переместить дрон.
Модификация IR-Lock состоит в том, что в качестве маркера, который нужно распознать используется ИК фонарь из светодиодов, а на камере обычные линзы заменены на те, что пропускают только ИК свет. В итоге, при любом освещении, камера видит свечение фонаря белым цветом на черном фоне (и больше ничего), что сильно повышает точность распознавания.
Для нормальной работы этого датчика необходим еще и дальномер, который будет измерять высоту над землей. Разработчики рекомендуют использовать лазерный дальномер, например LightWare LW20 (20 грамм и $299, меряет до 100 м), или дешевый и короткий VL53L0X (менее 1 грамма и $10, меряет до 2 м), который стал поддерживаться в последних версиях Ardupilot. Почему-то ультразвуковой датчик для целей посадки не заслуживает доверия разработчиков IR-Lock.
Разработчики рекомендуют использовать лазерный дальномер, например LightWare LW20 (20 грамм и $299, меряет до 100 м), или дешевый и короткий VL53L0X (менее 1 грамма и $10, меряет до 2 м), который стал поддерживаться в последних версиях Ardupilot. Почему-то ультразвуковой датчик для целей посадки не заслуживает доверия разработчиков IR-Lock.
Кстати, дроны DJI автоматически садятся, используя ультразвук и стереокамеры.
Висеть, как вкопанный
Чтобы дрон умел висеть на одном месте и не “плавать”, одного только GPS не достаточно. К сожалению, из-за состояния атмосферы координаты с приемников GPS могут плавать в пределах десятков метров и для сантиметровой точности нужно использовать корректирующие системы GPS RTK. Эта система использует наземную неподвижную станцию, как эталон отклонений координат, и радиосвязь с бортом, чтобы отправить туда значения этих отклонений. Такая штука обязательно нужна для съемки фотопланов с последующей склейкой в большие карты, а для целей висения на месте я пока ограничусь оптическим датчиком PX4Flow.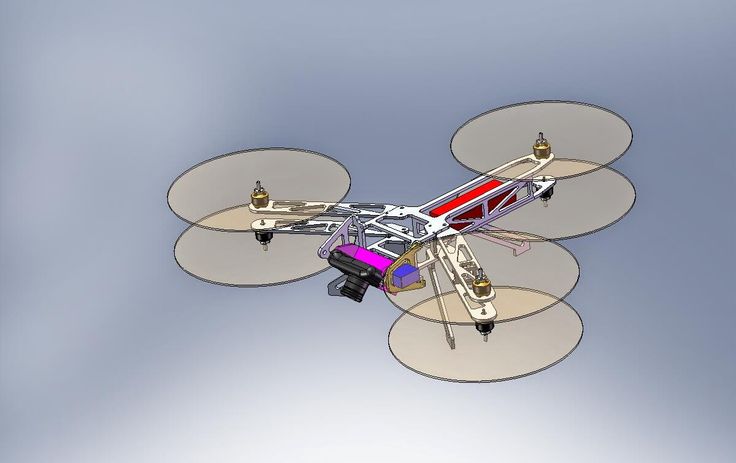
Работает он по такому же принципу, как и оптическая мышь. В отличие от IR-Lock, он не распознает конкретный образ и в Ardupilot они работают в разных полетных режимах. Изображение с камеры анализируется на смещение 400 раз в секунду, а вычисленные значения смещения могут быть прочитаны контроллером по протоколу I2C. Датчик (open-hardware) весит 15 грамм и имеет все необходимое у себя на плате: процессор 168 MHz Cortex M4F CPU (128 + 64 KB RAM), оптический сенсор 752×480 MT9V034 и 3-х осевой гироскоп L3GD20. Для его нормальной работы также рекомендуется использовать лазерный дальномер, вместо ультразвукового. Хотя на самом модуле предусмотрен разъем как раз для УЗ датчика.
Минимальный комплект электроники
Вот, что собралось:
Общий вес получается 199 г. Все компоненты работают от 5 Вольт и потребляют в режиме трансляции видео почти 2 Ампера (10 Ватт).
В наборе присутствует ультразвуковой датчик расстояния, который будет смотреть вперед на предмет препятствий. Стереозрение и круговые лидары я оставил на потом, если в них возникнет реальная необходимость.
Стереозрение и круговые лидары я оставил на потом, если в них возникнет реальная необходимость.
Полезная нагрузка
Так как родная камера от Raspberry делает средние по качеству фото, а также не умеет захватывать фото одновременно с видео, то она будет использоваться только для web-трансляции, а в качестве основной камеры нужна подходящая для выявления дефектов на ЛЭП. Для большей части позиций из списка выявляемых дефектов подойдут GoPro Hero 5 Session, мультиспектральная Parrot Sequoia, двойная Sentera Double 4K и инфракрасная FLIR Vue Pro. Каждая из них весит около 100 г.
Для стабилизации камеры с целью улучшения качества снимков в нагрузку с ней полетит 2х или 3х осевой подвес.
Простые 3-х осевые подвесы весят около 160 г и питаются от 12 Вольт, имеют рабочий ток при таком напряжении около 50 мА и максимальный ток 700 мА при заклинивании моторов.
Питание
Для питания всей электроники необходимы источники на 5 Вольт (минимум 2,2 Ампера) и 12 Вольт (минимум 1 Ампер). С учетом резервного питания полетного контроллера, нужно два независимых источника на 5 Вольт. Сделать систему питания можно из отдельных модулей подходящего номинала или найти готовый “3 в 1”, например такой (24 г, макс входное напряжение до 28 Вольт, выходы по 3А). К нему будет подключен датчик тока (22 г), чтобы была возможность измерять расход мАч на аккумуляторе.
С учетом резервного питания полетного контроллера, нужно два независимых источника на 5 Вольт. Сделать систему питания можно из отдельных модулей подходящего номинала или найти готовый “3 в 1”, например такой (24 г, макс входное напряжение до 28 Вольт, выходы по 3А). К нему будет подключен датчик тока (22 г), чтобы была возможность измерять расход мАч на аккумуляторе.
Комплект электроники + камера + подвес + система питания весят 505 г.
Моторы и пропеллеры
На многих профессиональных дронах я видел моторы и пропеллеры компании T-Motor. Видимо, не спроста. В документации Ardupilot они также рекомендованы как силовая установка для профессиональных дронов. Поэтому, поищем подходящие моторы у них.
Чтобы дрон летал долго, нужны моторы с максимальным КПД. Эффективность связки мотора и пропеллера измеряется количеством тяги в граммах на 1 Ватт затраченной электроэнергии.
Чтобы узнать какой мотор самый подходящий, нужно знать общий вес полностью собранного дрона с учетом рамы, аккумулятора и самих моторов с винтами. Аккумулятор нужен такой, чтобы его хватило минут на 30 полета. Рама нужна такая, чтобы на нее все поместилось и винты ничего не задевали.
Аккумулятор нужен такой, чтобы его хватило минут на 30 полета. Рама нужна такая, чтобы на нее все поместилось и винты ничего не задевали.
Слишком много неизвестных, поэтому воспользуюсь онлайн калькулятором для квадрокоптеров E-calc.
Поигравшись в калькулятор, я выбрал моторы Antigravity 4004 KV300 (53 г) с винтами 15х5 (27 г). В оптимальном режиме при напряжении питания 24 Вольта такой комплект тянет 474 грамма при токе 1,4 А. Эффективность получается 14.11 г/Ватт, отношение тяги к собственному весу = 5.9:1. На полном ходу тяга составляет 1311 грамм при токе 7,5 А. Коптер будет с четырьмя моторами, то есть квадро. Оптимальный взлетный вес = (474 г * 4 мотора) = 1896 г, максимальный (с учетом тяговооруженности 2:1) = (1311 г * 4 мотора) / 2 = 2622 г.
Моторы управляются регуляторами оборотов. Напряжение питания моторов = 24 Вольта, максимальный рабочий ток = 7,5 А, поэтому нужен регулятор под такое напряжение и с рабочим током, с учетом запаса, минимум 10А. У T-Motor самый легкий регулятор (7 г без проводов) под такое напряжение — это FPV 35A-32bit 3-6S. Он сделан на основе популярной прошивки BLHeli-32, с закрытым кодом, но с широкими возможностями настроек и большим числом аналогов.
Он сделан на основе популярной прошивки BLHeli-32, с закрытым кодом, но с широкими возможностями настроек и большим числом аналогов.
Подитог:
ВМГ (винто-моторная группа), состоящая из моторов, пропеллеров и регуляторов (по 4 шт каждого) весит 346 г.
Вместе с электроникой и полезной нагрузкой (346 + 505) получается 851 г. С учетом крепежа, проводов и разъемов (прикинем +100 г) = 951 г.
При оптимальном весе, на раму и аккумулятор остается (1896 — 951) = 945 г. При максимальном (2622 — 951) = 1671 г.
Рама
Рассчитаем минимальный размер рамы, чтобы выбранные 15-дюймовые пропеллеры не мешали друг другу создавать тягу. Размеры рамы производители указывают в расстоянии между осями моторов, расположенных по диагонали друг от друга.
По картинке можно узнать гипотенузу, которая вычисляется из катета, равного сумме диаметра винта и расстояния между пропеллерами. Соседние лопасти 15-дюймового винта будут крутиться в 1 миллиметре друг от друга при диагонали рамы 540 мм. Добавим немного пространства и размер подходящей рамы будет равен примерно 600-700 мм.
Добавим немного пространства и размер подходящей рамы будет равен примерно 600-700 мм.
В продаже найти таких можно много, например, раз: 600мм и 750г, два: 650мм и 450г, три: 690 и 675г, четыре: 650мм и 750г. Все они отличаются исполнением и наличием складных элементов (шасси, лучи) для удобства транспортировки.
Выбор конкретного экземпляра для своих нужд пока отложу, для дальнейшего расчета буду иметь в виду вес рамы равный 450 г.
Остается аккумулятор весом 495 г для оптимального веса и 1221 г для максимального.
Аккумулятор
Для выбора аккумулятора нужно знать какой он должен отдавать ток.
На полном ходу двигатели будут “есть” 30А (7,5А * 4 мотора), а электроника примерно 0,45А (10 Ватт). С учетом небольшого запаса округлим минимальный рабочий ток аккумулятора в 35А. Для Li-Po батарей с высокой токоотдачей в 30С минимальная емкость будет равна 1,2 Ач (35/30), а для более легких Li-Po и Li-Ion с токоотдачей в 10С минимальная емкость 3,5 Ач (35/10).
Как вариант, сборка 6S2P из Li-Ion Sony VTC6 с BMS весит примерно 630 г (при емкости 6 Ач). С этим аккумулятором дрон будет весить 2031 г, что больше оптимального на 135 г, но в пределах максимального. Теперь посчитаем на какое время коптер сможет зависнуть при идеальных условиях. При общем весе в 2031 г на каждый мотор приходится 508 г. Взглянем на характеристики мотора и найдем потребляемый ток при такой тяге. Он примерно будет равен 1,6А. 4 мотора и электроника дадут в сумме 6,85A (1,6 * 4 + 0,45). С учетом разрядки аккумулятора до 20% получится (6 Ач * 80% / (6,85 A)) = 0,7 часа или 42 минуты.
Компоновка
Пока я выбирал подходящую раму и думал как все это на ней размещать и чем крепить, пришел к выводу, что проще будет нарисовать несколько деталей и заказать 3D-печать из пластика и фрезеровку из карбона. Пару готовых железок и крепеж можно заказать на Алиэкспрессе.
Немного поэкспериментировав с компоновкой и центром тяжести, получилась вот такая рама:
Она состоит из карбоновых трубок и пластин, деталей из алюминия и крепежа из титана. Расчетный вес рамы получился 350 г при диагонали 700 мм. 3D-модель рамы и список деталей.
Расчетный вес рамы получился 350 г при диагонали 700 мм. 3D-модель рамы и список деталей.
Полностью собранная модель (без проводов):
Общий вес коптера с электроникой, аккумулятором Li-Ion 6S2P и проводами должен получится 1931 г.
Да, мне тоже показалось, что дрон получился слишком голым для автономного варианта и мелкий дождик легко намочит бортовую электронику. Поэтому добавил немного пластика:
3D-модель рамы. Список деталей рамы.
3D-модель в сборе. Список компонентов.
Вес пустой рамы с корпусом 384 г, общий вес 2020 г, расчетное время висения на одной зарядке (разряд аккумулятора до 20%): 44 минуты.
Бокс для зарядки
Бокс для зарядки будет сделан из алюминиевого профиля, крепежной фурнитуры и алюминиевых сендвич-панелей. В нем будут установлены роутер, компьютер, погодные датчики и камера с видом на посадочную зону. Я решил сделать покатую крышу из двух створок, чтобы зимой на ней не скапливался снег и не мешал открыванию. Механизм открывания створок до конца еще не продуман, а также не определена система зарядки (нуждаюсь в подсказках).
Механизм открывания створок до конца еще не продуман, а также не определена система зарядки (нуждаюсь в подсказках).
В следующей статье я расскажу как настроить и запустить дрон через интернет с помощью GUI или командной строки, про варианты систем зарядки из которых я сейчас выбираю, ПО для управления коптером и анализа снимков и почему мой первый полет через интернет продлился так недолго:
Продолжение следует…
Часть 2 про ПО.
Дрон с камерой — подробный обзор популярного девайса.
Отличную возможность для съемки с высоты птичьего полета предоставляют квадрокоптеры с камерой, позволяющие делать не только фото, но и видео. Существуют модели со встроенной камерой, а некоторые имеют специальные крепления. В них можно установить любую камеру, приобретенную отдельно.
Важные характеристики камер
Каждое устройство имеет свои плюсы и минусы. Главным образом, камера выбирается на основе того, для каких целей она предназначается. Чтобы просто наблюдать за полетом в режиме реального времени, можно использовать недорогую модель. Если же необходимо снимать качественные фото и видео, то здесь нужна более дорогая и модифицированная камера.
Чтобы просто наблюдать за полетом в режиме реального времени, можно использовать недорогую модель. Если же необходимо снимать качественные фото и видео, то здесь нужна более дорогая и модифицированная камера.
Главные характеристики:
- возможность установить камеру на подвес квадрокоптера;
- высокое разрешение видео для съемки замечательных материалов;
- наличие приставки Wi-Fi для получения изображения в прямой трансляции на дисплей пульта управления или мобильного устройства;
- хороший угол обзора, чтобы запечатлеть как можно больше окружающего пространства и природных пейзажей;
- продолжительное время работы, которое особенно важно для создания длинных видеороликов.
Вес камеры тоже имеет значение, он влияет на длительность полета БПЛА. Чем меньше дрон – тем легче должна быть камера. Ее комплектация может включать всевозможные зажимы и крепления, или не иметь ничего в своем составе. Второй вариант подойдет тем, кто желает самостоятельно собрать квадрокоптер под личные нужды.
Преимущества дронов с камерами
Устройства, оснащенные специальными камерами – это средство развлечения, а также проведения профессиональной аэросъемки. С такими квадрокоптерами можно:
• любоваться с высоты красивыми пейзажами;
• получать прекрасные фотографии;
• снимать качественные видеоролики с высоким разрешением.
Существуют камеры с функцией TimeLapse – замедленная съемка. Она позволяет создавать интересные видео и делиться ими с друзьями. Многофункциональные квадрокоптеры с камерой – это идеальный вариант для тех владельцев дронов, кто занимается фото и видеосъемкой. Довольно распространены и промышленные квадрокоптеры, которые используют профессионалы в разных отраслях, в основном для мониторинга.
Аккумуляторы для квадрокоптера
Такой элемент, как аккумуляторы для квадрокоптеров – то же самое, что и топливный бак в вертолете или самолете – одна из важнейших частей. Без нее дрон просто не взлетит. Время нахождения в воздухе зависит от главных характеристик батареи.
Лучший аккумулятор для квадрокоптера
Для устройства следует выбирать батарею с небольшим весом, но большой емкостью. Отличным вариантом являются литиевые аккумуляторы, которые используются практически во всех моделях дронов от различных компаний-производителей. Главными характеристиками батарей являются:
- емкость, измеряемая в ампер-часах. Она определяет ток, выдаваемый аккумулятором в течение часа до того, как наступит полная разрядка. Чем выше значение этого тока, тем быстрее произойдет разряд;
- максимальный разрядный ток. Эта величина указывает то, какой ток аккумулятор способен выдавать кратковременно и насколько его значение выше емкости;
- напряжение, измеряемое в вольтах. Каждый аккумулятор состоит из ячеек с напряжением, равным в среднем 3,7 В. Чем больше таких ячеек, тем выше напряжение батареи.
Заряжаются аккумуляторы от устройства, обеспечивающего равномерный заряд всех составных ячеек. Питание приборов осуществляется не от электрической сети, а от специальных источников с постоянным током в 12 В.
Мощный аккумулятор – залог продолжительного полета
Токоотдача батарей (максимальный разрядный ток) должна быть как можно выше, потому что от этого зависит продолжительность полета. Но такой высокий показатель напрямую влияет на вес аккумулятора, делая его тяжелее.
У LiPo (литий-полимерных) батарей имеется ряд преимуществ:
- низкий саморазряд – в «спящем» режиме не будет происходить моментальная разрядка;
- отсутствует эффект памяти – при неправильном режиме зарядки не произойдет потеря емкости;
- они могут работать при любых температурных условиях – жарким летом и холодной зимой.
Литий-полимерные аккумуляторы для квадрокоптеров – это необходимая деталь для уверенного и длительного полета
Конструкция и комплектация квадрокоптера
Квадрокоптером называют летательное беспилотное устройство, снабженное четырьмя пропеллерами. Управляется такой аппарат с помощью специального дистанционного пульта. Благодаря встроенной профессиональной камере производится съемка (фото и видео) в процессе полета. При выборе лучшего квадрокоптера учитывается множество моментов, включая функциональность и стоимость.
При выборе лучшего квадрокоптера учитывается множество моментов, включая функциональность и стоимость.
Внешне похожий на «гостя» с другой планеты, квадрокоптер смотрится очень оригинально и даже немного фантастически. Кроме того, необычная конструкция улучшает технические характеристики аппарата (мощность, скорость, маневренность).
В базовую комплектацию любого коптера входит:
- рама из карбона, алюминия или стекловолокна;
- контроллер, к которому подсоединяются двигатели и элементы управления полетом;
- моторы. В квадрокоптере их 4, что, собственно, и дало название летательному аппарату;
- пропеллеры – по одному на каждый двигатель. Половина из этих винтов вращается по часовой стрелке, остальные – в обратном направлении;
- три гироскопа, позволяющие аппарату удерживать курс и зависать при необходимости в воздухе;
- аккумулятор;
- пульт дистанционного управления.
Помимо основных элементов дроны могут оснащаться барометрическими датчиками, акселерометром, системами GPS, SPI, FPV, камерой и т. д. «Начинка» квадрокоптера зависит от фирмы-производителя, модели и сферы применения. Среди огромного разнообразия имеются квадрокоптеры радиоуправляемые с диаметром винтовых лопастей от 4,5 до 30 см и больше.
д. «Начинка» квадрокоптера зависит от фирмы-производителя, модели и сферы применения. Среди огромного разнообразия имеются квадрокоптеры радиоуправляемые с диаметром винтовых лопастей от 4,5 до 30 см и больше.
- мини или нано модели – беспилотники для начинающих, которые можно запускать даже в помещении;
- миди или средние – для более продвинутых пользователей. Имеют защиту от падений и повреждений окружающих предметов. Запускаются в доме, либо на улице в безветренную погоду. Могут оснащаться простыми камерами;
- макси или большие – квадролеты для профессионалов. Имеют более разнообразный функционал, лучше защищены от внешних воздействий, более мощные и качественные. Использовать такие аппараты внутри помещения нельзя, необходимо зарегистрировать данный аппарат и для полета необходимо получать разрешение.
Кроме размера есть еще один важный параметр — возможность складывания. Складной дрон имеет больше преимуществ за счет компактного размера и легкой транспортировки. Некоторые коптеры можно легко поместить в рюкзак или в карман, но что касается более сложных аппаратов, их транспортировка обычно осуществляется в защитном кейсе или чемодане.
Некоторые коптеры можно легко поместить в рюкзак или в карман, но что касается более сложных аппаратов, их транспортировка обычно осуществляется в защитном кейсе или чемодане.
Как правильно выбрать квадрокоптера?
Перед тем как приобрести беспилотный летательный аппарат, необходимо определиться с целью покупки. Сегодня его используют для съемки репортажей, гонок, развлечений. Срок передвижения квадрокоптера зависит от объема батареи. Обычно после заряда аккумулятора аппарат может летать в течение получаса. Диапазон цен на рынке довольно широкий: отбюджетных вариантов до самых дорогих, цена которых исчисляется тысячами долларов.
Критерии выбора квадрокоптера:
- стоимость;
- функциональные возможности;
- качество камеры;
- свойства полета;
- цель покупки.
Новичкам не рекомендуют приобретать слишком дорогие беспилотники, поскольку неопытность в обращении часто приводит к поломкам.
Рейтинг лучших квадрокоптеров
Определяя наилучшие образцы беспилотных летательных аппаратов, потребители учитывают такие факторы, как фотоформат (видео), максимальная скорость, операционная программа. Важное значение имеет качество съемки, угол обзора камеры, поддержка. Практические показатели в процессе тестирования являются определяющими.
Важное значение имеет качество съемки, угол обзора камеры, поддержка. Практические показатели в процессе тестирования являются определяющими.
Квадрокоптеры, которые пользуются популярностью во всем мире:
- Skydio 2 (США) – дорогая многофункциональная модель, изготовленная из прочного пластикового материала.
- Yuneec Typhoon h4 (Китай, Германия) – аппарат снабжен инновационной оптикой, позволяющей получать детализированные снимки и видео.
- 3D Robotics IRIS+ (США) – многофункциональный экземпляр, созданный на основе передовых технологий.
- Aeryon Scout (США) – модель отличается высокой скоростью (50 км/час).
- DJI Mavic 2 Enterprise Dual (Китай) – беспилотник оснащен тепловизионной камерой, со встроенной памятью – 24 Гб.
- Xiaomi Fimi X8 SE (Китай) – относительно недорогая модель, оснащенная надежной камерой (4 килопикселя) и барометром.
- Hubsan h217S Zino (Китай) – бюджетный складной квадрокоптер с GPS-навигатором, барометром.
- Ryze Tech Tello (Китай) – недорогой маневренный, компактный аппарат.
- Syma X20 (Китай) – прочная модель с подсветкой, способная летать в помещении.
- Fimi X8 SE (Китай) – относительно недорогой аппарат, наделенный мощной скоростью (64,8 км/ч, по прямой).

камер FPV для дронов | Ключевые факторы и рекомендации
FPV означает просмотр от первого лица. Зачем нам камера? Правильный вопрос!!! Камера FPV должна обеспечивать пилоту прямую аналоговую видеотрансляцию, чтобы пилот мог маневрировать своим дроном. Видеопоток с этой камеры FPV поможет пилоту летать. HD-камеры — еще одна разновидность камер, используемых на коптерах. Теперь следующий вопрос, который приходит вам на ум, почему существует 2 разных типа камер?
Подробнее…
Камеры FPV и HD — это два типа камер, которые служат двум разным целям.
Камеры FPV обеспечивают передачу видео с очень малой задержкой и исключительным качеством изображения.
HD-камеры записывают сверхчеткие видеоролики, на которые приятно смотреть.
Задержка HD-камеры слишком велика для передачи (примерно 150 мс) и, следовательно, не может использоваться для прямой передачи видео, тогда как FPV-камеры не могут записывать HD-видео (или могут!! Подробнее об этом ниже).
Quick Navigation
Imaging Sensor- CCD or CMOS
Form Factor
Aspect Ratio
Latency
Input Voltage
Field of View
Video Encoding Format- NTSC or PAL
TVL- Camera Resolution
Wide Динамический диапазон (WDR)
Характеристики при слабом освещении
Экранное меню (OSD)
HD-камеры для FPV
Настройки камеры
Традиционно пилоты FPV использовали относительно дорогие, большие и громоздкие HD-камеры, такие как Runcam 3 или GoPro Герой 7. Но каменный век ушел в прошлое, когда крошечные миниатюрные камеры FPV, такие как Runcam Split 2, имеют печатную плату 36×36, записывающую видео 1080p, стоят в 4 раза дешевле GoPro и в 5 раз легче по весу.
Камеры FPV бывают всех форм и размеров. Чтобы упростить процесс покупки, ниже перечислены некоторые факторы, которые помогут человеку оценить FPV-камеру и выбрать подходящую.
Лучшая FPV-камера для дрона
Лучшие FPV-камеры со временем стали лучше: задержки значительно сократились, а качество изображения значительно улучшилось. Камеры FPV бывают разных размеров для различных применений квадроциклов, используемых сегодня.
Существуют преимущественно 3 основных размера камер FPV: стандартные или полноразмерные, микроразмерные и наноразмерные камеры.
Камеры стандартного размера в основном поэтапные из-за их громоздкости и были заменены камерами микроразмера, но стандартные камеры все еще используются сегодня из-за их надежности и прочности.
988
458
40088
Камера FPV стандартного размера | Камера FPV микроразмера | Nano-sized FPV Camera | |||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
FPV Camera | Runcam Swift 2 | Caddx Ratel | Runcam Nano 2 | ||||||||||||||||||||||||||
размеры | 28,8 x 26 x 26 мм | 19 x 19 x 19 мм | 14 x 14 x 16 м. | ||||||||||||||||||||||||||
Weight | 14g | 8g | 3.2g | ||||||||||||||||||||||||||
Camera Sensor | CCD | CMOS | CMOS | ||||||||||||||||||||||||||
Соотношение сторон | Фиксированный 4:3 | Изменяемый 16:9, 4:3 Фиксированный 9008 003 | |||||||||||||||||||||||||||
Signal type | PAL | Changeable 16:9, 4:3 | Fixed 4:3 | ||||||||||||||||||||||||||
Input voltage | 5 — 36 В | 5 — 40 В | 3 — 5,5 В | ||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||
. 0052 0052Runcam Swift 2Стандартная камера Стандартный FPV Camera Runcam Swift 2 Первый запуск в 2017 году. . Причина успеха Swift 2 — датчик камеры CCD, который он предлагал, и функции, которые он с ним интегрировал. $ Проверить цену на GetFPV Да, камеры CMOS лучше, чем CCD, имеют меньшую задержку и гораздо меньшее энергопотребление, но качество изображения, предлагаемое CCD, намного лучше, чем CMOS. По мере того, как индустрия FPV двигалась к более быстрой и малой задержке, дни ПЗС-сенсоров изображения были сочтены. Swift 2 относится к категории камер стандартного размера, это самый большой размер камеры, используемый для FPV. Вес Swift 2 исходит от металлического корпуса, который закрывает материнскую плату и датчик камеры. Best Micro FPV CameraCaddx RatelMicro FPV Camera Micro-sized FPV camera Caddx Ratel 2 Caddx is a relatively new player in the FPV camera market которая в последнее время выпускает невероятно хорошие FPV-камеры, Ratel — одна из них. $ Проверить цену на Amazon. Камеры микроразмера не уступают своим полноразмерным аналогам с характеристиками, равными или превосходящими возможности камер стандартного размера. Огромная популярность Caddx Ratel отчасти объясняется исключительным качеством изображения, которое он предлагает. Ratel может похвастаться большим сенсором 1/1,8 дюйма с разрешением 1200 ТВЛ. Датчик изображения — это то, что Caddx называет датчиком звездного света, освещения луны и звезд в ночном небе достаточно для полета. Ratel также поставляется с изменяемым пользователем соотношением сторон 4:3 и 16:9.соотношение сторон и выход камеры могут переключаться между PAL и NTSC пользователем. Эта функция, переключаемая пользователем, является удобным выбором для тех, кто не хочет зацикливаться на формате 4:3 или выходе сигнала PAL. Ratel можно выбрать с объективом 1,66 мм или 2,1 мм, кроме того, объектив 2,1 мм также поставляется с фильтром нейтральной плотности. Лучшая нано-камера FPVRuncam Nano 2Нано-камера FPV Нано-камера FPV RunCam Nano 4 Runcam работает в индустрии FPV с тех пор, как существует FPV. $ Проверить цену на Amazon Runcam Nano 4 — это нанокамера, которая в основном используется в сборках размером 3 дюйма и меньше. В Nano 4 используются те же 1/3-дюймовые CMOS-сенсоры, что и в других более крупных аналогах Runcam, с разрешением 800 ТВЛ. Камера поставляется со сверхшироким углом и фиксированным видеовыходом, который можно выбрать между PAL или NTSC при покупке. Nano 4 поставляется с объективом 2,1 мм при 155 ° FOV и 1,8 мм при 170 ° FOV. Nano 4 теряет вес (2,9g) путем выбора корпуса датчика камеры из АБС-пластика, и ему пришлось отказаться от возможности работать в больших диапазонах напряжения. Разъемы припаяны, что избавляет вас от хлопот, связанных с пайкой этих маленьких контактных площадок. Но по цене и качеству изображения Runcam Nano 4 является лучшим в этой категории. Еще одним достойным упоминания является устройство Runcam Phoenix 2 Nano с переключаемыми пользователем соотношениями сторон и видеовыходами, которое может потреблять напряжение до 36 В при очень низком энергопотреблении. Best AIO FPV CameraMicro AIO FPV CameraAll in One All in one FPV camera AKK BA3 AIO cameras are a compact breed of FPV cameras that come with камера и видеопередатчик, но в корпусе меньшего размера, чем типичный видеопередатчик. $ Проверить цену на Amazon Камеры AIO представляют собой компактную породу камер FPV, которые поставляются с камерой и видеопередатчиком, но в упаковке меньшего размера, чем типичный видеопередатчик. При цене около 20 долларов за камеру, видеопередатчик и антенну AKK по-прежнему дешевле, чем Caddx Ratel. Камера AIO имеет общий вес 4,2 г, 4,2 г для камеры, видеопередатчика и передатчика. Камера имеет угол обзора 120°, а Getfpv предоставляет крепление для камеры, которое можно распечатать на 3D-принтере. Факторы, которые следует учитывать при выборе FPV-камерыДатчик изображения — ПЗС или КМОП ПЗС (устройство с зарядовой связью) и КМОП (дополнительные датчики изображения) — оксидно-полупроводниковые датчики2 используются в камерах FPV, где они в основном различаются в зависимости от того, как изображение захватывается датчиком, размещенным в камере FPV. Камеры FPV преобразуют световые сигналы в электрические сигналы, чтобы их можно было передавать с помощью аналоговых видеопередатчиков. Датчик изображения Оба датчика изображения CCD и CMOS начинают с захвата изображения и преобразования изображения в цифровые сигналы. Следующим шагом является считывание значения (электроны или заряд, накопленный камерой). На этом сходство между ними заканчивается. Основное различие заключается в том, как электрический сигнал обрабатывается и выводится. В ПЗС-датчике изображения электрический сигнал передается через чип и считывается в одном из углов матрицы. Электрический заряд от строки пикселей переносится на следующую до тех пор, пока все строки пикселей не завершат вывод. В отличие от ПЗС, КМОП-сенсоры считывают электрические сигналы каждого отдельного пикселя (пиксель — это крошечная точка или квадрат, являющийся частью цифрового изображения). Датчики CMOS имеют отдельные транзисторы для отдельных пикселей по сравнению с несколькими транзисторами в датчике CCD. Еще одним существенным недостатком КМОП-сенсоров является то, как они захватывают изображение. Если вы ничего не поняли из вышеизложенного, знайте следующее: ПЗС-датчик изображения создает изображения высокого качества и менее чувствителен к электрическим помехам. CMOS, как правило, имеют более низкую светочувствительность и потребляют значительно меньше энергии, чем датчик изображения CCD. CMOS также имеют более низкое качество изображения, но с постоянными улучшениями датчики CMOS пытаются догнать датчики CCD. Форм-фактор Существует 4 основных размера камер: стандартный, мини, микро и наноразмер. Эти камеры классифицируются по монтажным отверстиям, с помощью которых камера крепится к раме. Каждый кадр дрона отличается и поддерживает определенные размеры камеры. Стандартный размер был выбран Runcam Swift, когда он был запущен в 2017 году с монтажными отверстиями на расстоянии 28 мм друг от друга. Они подходят ко всем рамам большего размера, а также к некоторым рамам среднего размера. Они также используются в самолетах RC FPV. Мини-камеры имеют монтажные отверстия диаметром 21 мм, которые обычно подходят для рам среднего размера. Камеры мини-размера стали популярны в наши дни, поскольку они превращаются в камеры FPV/HD. Камеры микроразмера используются со сверхлегкими рамами гоночных дронов, где важно экономить каждый грамм веса. Но не обманывайтесь размером, поскольку он может работать так же, как камера стандартного размера. Крепежные отверстия 19мм друг от друга. Камеры Nano не имеют специальных вариантов крепления. Соотношение сторонСоотношение сторон относится к размеру изображения, отображаемого на мониторе или экране. Формат изображения 16×9 будет иметь более широкое и короткое изображение, чем формат 4×3. Формат изображения 4×3 может показаться выше. Есть пилоты FPV, которые предпочитают как 16×9и 4х3. Но широко признано, что формат изображения 4×3 помогает летать лучше из-за более высокого изображения. Но соотношение сторон также может зависеть от камеры и объектива камеры. Некоторые камеры FPV поддерживают формат изображения 16×9 и 4×3. Большинство CMOS-камер изначально поддерживают формат 16×9, для CMOS-камеры для отображения формата изображения 4×3 стороны могут казаться обрезанными от 16×9 для формирования изображения 4×3. Задержка Камерам FPV требуется время для захвата и обработки изображения. Задержка может быть связана не только с самой камерой. Видеопередатчики и ЖК-экраны в очках FPV также могут увеличить задержку. Если вы летите медленно и ближе к вам, задержка не представляет серьезной проблемы для покупателя. Но при полете на гоночном квадроцикле со скоростью 100 миль в час с задержкой в 100 мс от FPV-камеры дрон находится на 4 м впереди, и у вас нет времени среагировать и исправить свои действия. Это теория, большинство современных камер FPV имеют время задержки всего 10 мс. Благодаря постоянным улучшениям камеры, такие как Foxeer Predator V3, имеют задержку всего 4 мс. Входное напряжение Входное напряжение относится к диапазону напряжений, которые можно безопасно подавать для безопасной работы камеры. Хорошо сконструированная камера FPV будет поддерживать широкий диапазон напряжений, при этом большинство современных камер поддерживают напряжение до 35 В. Входное напряжение относится к диапазону напряжений, которые можно безопасно подавать для безопасной работы камеры. Хорошо сконструированная камера FPV будет поддерживать широкий диапазон напряжений, при этом большинство современных камер поддерживают напряжение до 35 В. Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В). Не рекомендуется подавать на камеру большое напряжение, так как внутреннее рабочее напряжение ниже. Чем выше входное напряжение, тем сильнее BEC работает, чтобы понизить это напряжение. Подача более низкого напряжения также делает камеру более прохладной. Поэтому рекомендуется подавать более низкое входное напряжение. Большинство современных ПК имеют фильтрованные источники питания, предназначенные для FPV-камеры, поэтому стоит присмотреться к ПК, который вы собираетесь использовать. Поле зренияПоле зрения (FOV) относится к наблюдаемой области, захваченной камерой. Размер объектива камеры определяет FOV. Чем меньше объектив камеры, тем больше FOV. 2
|
 0003
0003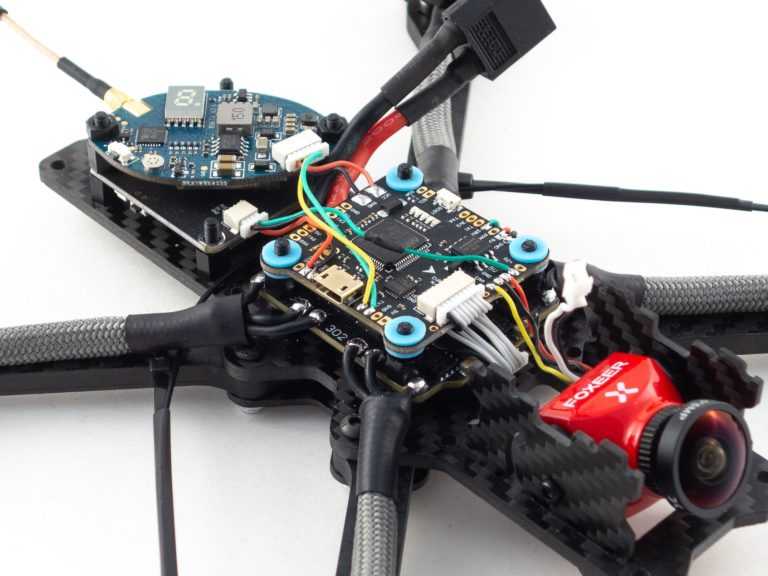 Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
 Кто еще может сделать FPV-камеры лучше?
Кто еще может сделать FPV-камеры лучше?
 Видеопередатчик представляет собой 48-канальный видеопередатчик, способный передавать мощность 0 мВт, 25 мВт и 200 мВт, который может питаться от напряжения в пределах 2,9 В.-5,5В. Передатчик, что удивительно для его небольшого размера, поддерживает интеллектуальное аудио, через которое он подключается к Betaflight. Ближайшим вторым является Wolwhoop Micro AIO с аналогичными характеристиками.
Видеопередатчик представляет собой 48-канальный видеопередатчик, способный передавать мощность 0 мВт, 25 мВт и 200 мВт, который может питаться от напряжения в пределах 2,9 В.-5,5В. Передатчик, что удивительно для его небольшого размера, поддерживает интеллектуальное аудио, через которое он подключается к Betaflight. Ближайшим вторым является Wolwhoop Micro AIO с аналогичными характеристиками.
 ПЗС-сенсоры используют глобальный затвор (захватывает изображение мгновенно), а КМОП-сенсоры используют скользящий затвор (скользящий затвор — захват изображения построчно). Поскольку датчик CMOS выводит изображение построчно, любые вибрации могут привести к искажению изображения. Это искажение известно как эффект JELLO.
ПЗС-сенсоры используют глобальный затвор (захватывает изображение мгновенно), а КМОП-сенсоры используют скользящий затвор (скользящий затвор — захват изображения построчно). Поскольку датчик CMOS выводит изображение построчно, любые вибрации могут привести к искажению изображения. Это искажение известно как эффект JELLO. Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать.
Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать. Обычно они не поставляются в жестких футлярах, как камеры стандартного размера. Они в основном используются на квадроциклах размером до 2 дюймов.
Обычно они не поставляются в жестких футлярах, как камеры стандартного размера. Они в основном используются на квадроциклах размером до 2 дюймов. Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше.
Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше. Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В).
Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В). Напряжение в пределах 12В считается номинальным.
Напряжение в пределах 12В считается номинальным. . С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения.
. С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения. Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает.
Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает. 43 MP
43 MP
 Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом.
Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом. Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота.
Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота. Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования.
Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования. Вместо того, чтобы тратить несколько сотен долларов на покупку дрона, вы можете создать свой собственный дрон всего за 9 долларов.9.
Вместо того, чтобы тратить несколько сотен долларов на покупку дрона, вы можете создать свой собственный дрон всего за 9 долларов.9.
 Поскольку они такие большие, октокоптеры обычно предназначены для пассажиров, которые хотят нести полезную нагрузку.
Поскольку они такие большие, октокоптеры обычно предназначены для пассажиров, которые хотят нести полезную нагрузку.
 Рейтинг KV указывает количество вольт, необходимое для питания двигателя. Для квадрокоптера новичка вы можете использовать моторы с низким номиналом KV в диапазоне 1000-1500. Эти двигатели дают вам возможность стабилизировать и практиковаться с вашим новым дроном.
Рейтинг KV указывает количество вольт, необходимое для питания двигателя. Для квадрокоптера новичка вы можете использовать моторы с низким номиналом KV в диапазоне 1000-1500. Эти двигатели дают вам возможность стабилизировать и практиковаться с вашим новым дроном. Рейтинги KV дают вам количество вольт, необходимое для питания каждого двигателя. Сначала определите двигатель, который вы хотите купить, а затем сопоставьте аккумулятор с требованиями по напряжению.
Рейтинги KV дают вам количество вольт, необходимое для питания каждого двигателя. Сначала определите двигатель, который вы хотите купить, а затем сопоставьте аккумулятор с требованиями по напряжению.