DIY автономный дрон с управлением через интернет / Хабр
Сначала я написал длинное предисловие откуда взялась такая задача, а потом оно мне показалось скучным и я его удалил.
Итак, задача: создание автономного БПЛА для мониторинга состояния линий электропередач (ЛЭП).
Так как:
- это хобби-проект и я могу сильно ошибаться в расчетах
- летающие предметы представляют опасность для живых существ и их имущества,
то эту статью следует воспринимать только как расширяющую кругозор, а не руководство к действию.
Список дефектов для обнаружения на ЛЭП.
Требования к БПЛА
- Вертикальный взлет и посадка (без катапульт и парашютов), то есть коптер
- Умеет взлетать, лететь по заданным точкам, возвращаться обратно и садиться в автоматическом режиме
- Редактировать полетное задание, давать команду на взлет и на посадку можно из любой точки мира
- Трансляция телеметрии и видео в реальном времени через интернет
- Загрузка на сервер фото и видео с бортовой камеры в процессе или после полета
- Зарядка или механизированная замена аккумулятора без участия человека.


А также два противоречащих друг другу требования:
- Надежная электроника (если где-то упадет, считай потерял)
- Относительно низкая стоимость эксперимента (если где-то упадет, считай потерял)
Степень автономности в идеале хочется фантастическую: дрон сам летает по заранее спланированному маршруту, загружает фото на сервер, ПО на сервере выявляет дефекты по фото и формирует заявку ремонтной бригаде с координатами мест проведения работ. Сам дрон не должен требовать к себе внимания человека до окончания рабочего ресурса какой-нибудь детали, например, аккумулятора или подшипников.
Понятно, что эта задача не на один год, но я начну, а кто-нибудь, может быть, подхватит и продолжит.
Для примера, готовые промышленные варианты автономных комплексов: раз, два, три, четыре, пять, шесть, семь, восемь, девять, десять, одиннадцать, двенадцать, тринадцать, четырнадцать. Я всем написал запросы как потенциальный покупатель, чтобы узнать цены. Из них готовых к продаже: 2; готовых к продаже в Россию: 0.
Я всем написал запросы как потенциальный покупатель, чтобы узнать цены. Из них готовых к продаже: 2; готовых к продаже в Россию: 0.
Выбор полетного контроллера
Так как мне нужно транслировать видео и телеметрию через интернет, то сразу приходит на ум поставить на дрон микрокомпьютер с 4G модемом и камерой, и сделать из этого комплекта web-трансляцию. Нашлись вот такие решения: раз, два, три. Это обычные одноплатники с внешним USB 4G модемом и камерой. Для кодирования и трансляции видео используется gstreamer. Но эти штуки сами по себе дроном управлять не умеют, их нужно использовать совместно с полетным контроллером.
Полетный контроллер — это мозг дрона. Он следит за состоянием датчиков положения (гироскоп, акселерометр, компас), GPS-координатами, положением ручек на пульте управления и, исходя из этих данных, управляет моторами, чтобы висеть в одной точке или куда-то лететь. Полетный контроллер нужно будет как-то связать с бортовым компьютером, чтобы можно было загрузить полетное задание или указать произвольную точку куда лететь и когда включать камеру.
В продаже можно найти много разных контроллеров сильно отличающихся друг от друга по цене и функционалу. Какие-то из них работают на своем родном ПО, а какие-то используют open-source ПО, такое как Ardupilot и его форк PX4.
С Ardupilot я игрался еще на 8-битных атмегах, в которых не было USB-bootloader’а, а прошивались они на программаторе. С тех пор с ним не сталкивался и был приятно удивлен, когда узнал, что сейчас он может работать на 64-битных компьютерах с Linux, у него огромное сообщество пользователей как хобби, так и профи, длинный список поддерживаемых “из коробки” датчиков и расписанные планы на 2018-2019 годы. За это время он успел перерасти в проект DroneCode, а потом и отсоединиться от него.
На первый взгляд в нем как раз реализованы все необходимые функции: автоматический взлет и посадка, загрузка полетных заданий, есть desktop и мобильные приложения под все основные семейства ОС. Программы управления (GCS — Ground Control Station) общаются с бортовым контроллером короткими сообщениями по открытому протоколу MAVLink через комплект радиомодемов (дрон шлет телеметрию, GCS шлет команды управления). Подозреваю, что эти сообщения получится пустить через интернет.
Подозреваю, что эти сообщения получится пустить через интернет.
Взглянем на список поддерживаемых контроллеров и что-нибудь подберем. Вариантов там полтора десятка от мала до велика и с разными характеристиками.
Из всего того многообразия контроллеров мне понравилось несколько вариантов:
| Полетный контроллер | Erle PXFMini | Emlid Edge | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Доп компьютер | Raspberry Pi Zero W | нет | Raspberry Pi 3 | нет | Raspberry Pi 3 |
|
| |||||
| Вес комплекта, г | 84 | 97 | 98 | 145 | 150 |
| Процессоры, общее кол-во | 1 | 2 | 2 | 1 | 3 |
| ОС, одновременно работающих | 1 | 1 | 1 | 1 | 2 |
| IMU датчики, комплектов | 1 | 2 | 2 | 1 | 3 |
| Датчик воздушного давления | 1 | 2 | 1 | 1 | 1 |
| Резервирование питания | нет | 2х | 3х | нет | 2х |
| GPS, Глонасс | внешний модуль с доп магнитометром | внешний модуль с доп магнитометром | встроенный приемник, внешняя антенна | внешний модуль с доп магнитометром | внешний модуль |
| Видеовход | CSI на Raspberry | HDMI | CSI на Raspberry | CSI | CSI на Raspberry |
| WiFi | есть | есть Long Range 2км +52 г | есть | есть | есть |
|
| |||||
| Стоимость комплекта, $ | 212 | 700 | 215 | 341 | 331 |
Самый легкий комплект (84 г) получается из микрокомпьютера Raspberry Pi Zero W (9 г), контроллера Erle PXFMini (15 г), родного внешнего GNSS модуля (46 г) и дополнительного USB-концентратора (14 г).
Рабочий процессор в этом комплекте один — на Raspberry Pi. На нем висит управление ШИМ регуляторов моторов, считывание показаний датчиков, ОС Linux со всеми потрохами и декодирование видео с камеры. Так как в Pi Zero не предусмотрены USB порты, то в этом варианте приходится использовать внешний концентратор. IMU датчики и вход питания без резервирования.
Следующий комплект (97 г) от гонконгской компании с русскими фамилиями в команде разработчиков — контроллер Emlid Edge (59 г) с GNSS модулем (38 г). GNSS модуль работает по протоколу UAVCAN и дополнительно оснащен магнитометром и датчиком воздушного давления. За ШИМ здесь отвечает отдельный процессор ARM Cortex-M3, ОС Linux крутится на основном ARM Cortex-A53 quad-core.
В контроллере имеется HDMI видеовход, что позволяет подключить к нему напрямую любую камеру с таким выходом, например GoPro 4 или 5. Относительно высокая стоимость объясняется дальнобойными wifi-приемопередатчиками в комплекте (до 2 км с трансляцией HD-видео). Вес бортового модуля (52 г) в общей таблице не включен, так как мне нужна связь по 4G, однако такой вариант можно иметь в виду: из дальнобойного wifi можно сделать запасной канал связи через стационарный роутер с проводным интернетом.
Вес бортового модуля (52 г) в общей таблице не включен, так как мне нужна связь по 4G, однако такой вариант можно иметь в виду: из дальнобойного wifi можно сделать запасной канал связи через стационарный роутер с проводным интернетом.
Следующий вариант (98 г) состоит из знаменитого микрокомпьютера Raspberry Pi 3 (45 г) с контроллером-шилдом Navio 2 (23 г) от той же Emlid и внешней GNSS-антенны (30 г). На контроллере стоит отдельный процессор Cortex-M3 для управления ШИМ на 14 каналах и расшифровки входящих SBUS и PPM сигналов от приемника. Он, в свою очередь, управляется через драйвер в ядре ОС Linux, которая крутится на Raspberry.
Контроллер оснащен парой раздельных IMU датчиков (акселерометр, гироскоп, магнитометр) MPU9250 и LSM9DS1, одним датчиком воздушного давления и GNSS-модулем U-blox NEO-M8N, который видит GPS, Глонасс и BeiDou с внешней антенной через разъем MCX.
Запитывать этот “пирог” от 5 вольт можно одновременно с трех сторон, которые работают как дублирующие друг друга независимые источники: основной разъем питания на шилде, PWM серво выходы, micro-USB на Raspberry.
Контроллер Erle Brain 3 (100 г) с внешним GPS модулем (45 г) по своим весу, цене и набору датчиков смотрится в таблице так, что даже фото сюда вставлять не буду.
Далее у нас самый надежный и самый тяжелый комплект (150 г), который состоит из популярного полетного контроллера PixHawk 2 Cube (80 г) с открытой архитектурой и компьютера Raspberry Pi 3. Вместо Raspberry в этом случае можно использовать любой легкий одноплатник, например, Odroid XU4, NVIDIA Jetson или любой другой с нужными интерфейсами и подходящим весом.
В самом PixHawk установлено 2 процессора: первый 32-битный STM32F427 Cortex M4 — основной, на котором работает ОС реального времени (RTOS) NuttX и второй резервный (failsafe) 32-битный STM32F103. Контроллер сделан в виде модулей: в кубе установлены процессоры и датчики IMU (на антивибрационном креплении, да еще и с подогревом), а на основу выведены питание и разъемы на всю периферию. Предполагается, что основы могут быть разными и все желающие могут разработать свою собственную под специфические требования, на которую можно потом поставить готовый куб. Есть, кстати, готовый вариант с разъемом под установку микрокомпьютера Intel Edison. Но, так как, Intel больше эти компьютеры не выпускает, то и в этом комплекте в качестве бортового компьютера будет Raspberry.
Есть, кстати, готовый вариант с разъемом под установку микрокомпьютера Intel Edison. Но, так как, Intel больше эти компьютеры не выпускает, то и в этом комплекте в качестве бортового компьютера будет Raspberry.
Raspberry используется как дополнительный компьютер для связи с интернетом и на нем можно запускать любые ресурсоемкие задачи (например, распознавание образов в OpenCV), не боясь, что сбои в таком процессе “повесят” критичные функции, такие как управление моторами.
Итак, учитывая вес, характеристики и цену на первое место для меня выходит комплект Navio 2 + Raspberry, а на второе Pixhawk 2 Cube + Raspberry (+52 г). Вот, если бы под Pixhawk была основа в разъемом для маленького Raspberry Zero, да еще и выводом USB, то было бы интересней. Но такую еще купить нельзя, а изготавливать ее пока не интересно.
Запишу в заметки, что повышенная надежность стоит дополнительные 52 грамма и $110. По общему итогу расчетов эти цифры могут оказаться незначительными.
Автономная зарядка
Как можно видеть в готовых вариантах выше, существует несколько подходов к подготовке автономного дрона к следующему полету: зарядка аккумулятора через контактные площадки, бесконтактная индукционная зарядка и механизированная замена аккумулятора с последующей его зарядкой на станции.
У каждого метода есть свои плюсы и минусы, о них я напишу отдельно, но в любом случае, для их функционирования дрон должен уметь приземляться в нужную точку практически с сантиметровой точностью.
Посадка “в точку”
Для точной посадки можно использовать стандартную камеру бортового компьютера, визуальные маркеры и OpenCV для их распознавания. Вот один из вариантов решения, который можно нагуглить. Еще один свежий появился, когда я писал эту статью. Но распознавание образов достаточно трудоемкий процесс для Raspberry, и без особой необходимости загружать его не хочется. Также качество распознавания будет сильно зависеть от материала из чего сделан маркер и условий освещенности. Желательно, чтобы это был отдельный датчик и отдавал готовые координаты нужной визуальной точки, независимо от наличия и угла падения света. И такой есть в списке поддерживаемого оборудования Ardupilot, называется IR-Lock.
Airobotics из списка выше также использует это решение. Он сделан на основе модуля камеры с открытым кодом Pixy CMUcam5. Этот модуль снабжен камерой и процессором, и его можно “научить” распознавать определенные образы объектов, а, затем, на выходе получать готовые координаты этих объектов на изображении.
Зная координаты распознанного образа на изображении и расстояние до него, полетный контроллер вычисляет на какое расстояние и в какую сторону нужно переместить дрон.
Модификация IR-Lock состоит в том, что в качестве маркера, который нужно распознать используется ИК фонарь из светодиодов, а на камере обычные линзы заменены на те, что пропускают только ИК свет. В итоге, при любом освещении, камера видит свечение фонаря белым цветом на черном фоне (и больше ничего), что сильно повышает точность распознавания.
Для нормальной работы этого датчика необходим еще и дальномер, который будет измерять высоту над землей. Разработчики рекомендуют использовать лазерный дальномер, например LightWare LW20 (20 грамм и $299, меряет до 100 м), или дешевый и короткий VL53L0X (менее 1 грамма и $10, меряет до 2 м), который стал поддерживаться в последних версиях Ardupilot. Почему-то ультразвуковой датчик для целей посадки не заслуживает доверия разработчиков IR-Lock.
Разработчики рекомендуют использовать лазерный дальномер, например LightWare LW20 (20 грамм и $299, меряет до 100 м), или дешевый и короткий VL53L0X (менее 1 грамма и $10, меряет до 2 м), который стал поддерживаться в последних версиях Ardupilot. Почему-то ультразвуковой датчик для целей посадки не заслуживает доверия разработчиков IR-Lock.
Кстати, дроны DJI автоматически садятся, используя ультразвук и стереокамеры.
Висеть, как вкопанный
Чтобы дрон умел висеть на одном месте и не “плавать”, одного только GPS не достаточно. К сожалению, из-за состояния атмосферы координаты с приемников GPS могут плавать в пределах десятков метров и для сантиметровой точности нужно использовать корректирующие системы GPS RTK. Эта система использует наземную неподвижную станцию, как эталон отклонений координат, и радиосвязь с бортом, чтобы отправить туда значения этих отклонений. Такая штука обязательно нужна для съемки фотопланов с последующей склейкой в большие карты, а для целей висения на месте я пока ограничусь оптическим датчиком PX4Flow.
Работает он по такому же принципу, как и оптическая мышь. В отличие от IR-Lock, он не распознает конкретный образ и в Ardupilot они работают в разных полетных режимах. Изображение с камеры анализируется на смещение 400 раз в секунду, а вычисленные значения смещения могут быть прочитаны контроллером по протоколу I2C. Датчик (open-hardware) весит 15 грамм и имеет все необходимое у себя на плате: процессор 168 MHz Cortex M4F CPU (128 + 64 KB RAM), оптический сенсор 752×480 MT9V034 и 3-х осевой гироскоп L3GD20. Для его нормальной работы также рекомендуется использовать лазерный дальномер, вместо ультразвукового. Хотя на самом модуле предусмотрен разъем как раз для УЗ датчика.
Минимальный комплект электроники
Вот, что собралось:
Общий вес получается 199 г. Все компоненты работают от 5 Вольт и потребляют в режиме трансляции видео почти 2 Ампера (10 Ватт).
В наборе присутствует ультразвуковой датчик расстояния, который будет смотреть вперед на предмет препятствий.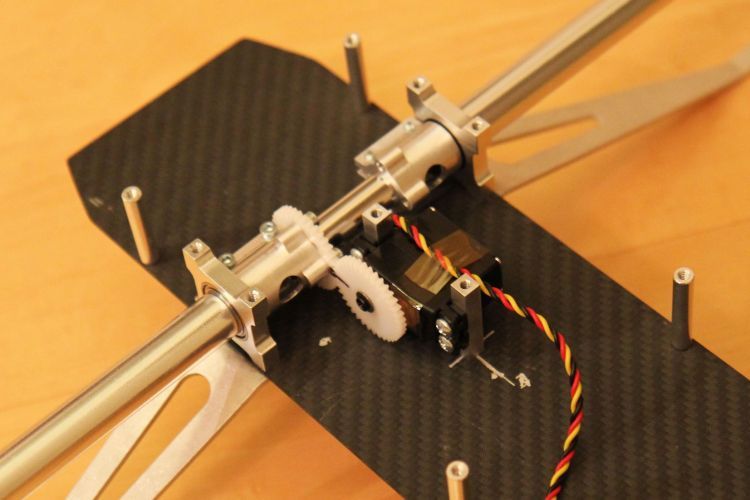 Стереозрение и круговые лидары я оставил на потом, если в них возникнет реальная необходимость.
Стереозрение и круговые лидары я оставил на потом, если в них возникнет реальная необходимость.
Полезная нагрузка
Так как родная камера от Raspberry делает средние по качеству фото, а также не умеет захватывать фото одновременно с видео, то она будет использоваться только для web-трансляции, а в качестве основной камеры нужна подходящая для выявления дефектов на ЛЭП. Для большей части позиций из списка выявляемых дефектов подойдут GoPro Hero 5 Session, мультиспектральная Parrot Sequoia, двойная Sentera Double 4K и инфракрасная FLIR Vue Pro. Каждая из них весит около 100 г.
Для стабилизации камеры с целью улучшения качества снимков в нагрузку с ней полетит 2х или 3х осевой подвес.
Простые 3-х осевые подвесы весят около 160 г и питаются от 12 Вольт, имеют рабочий ток при таком напряжении около 50 мА и максимальный ток 700 мА при заклинивании моторов.
Питание
Для питания всей электроники необходимы источники на 5 Вольт (минимум 2,2 Ампера) и 12 Вольт (минимум 1 Ампер). С учетом резервного питания полетного контроллера, нужно два независимых источника на 5 Вольт. Сделать систему питания можно из отдельных модулей подходящего номинала или найти готовый “3 в 1”, например такой (24 г, макс входное напряжение до 28 Вольт, выходы по 3А). К нему будет подключен датчик тока (22 г), чтобы была возможность измерять расход мАч на аккумуляторе.
С учетом резервного питания полетного контроллера, нужно два независимых источника на 5 Вольт. Сделать систему питания можно из отдельных модулей подходящего номинала или найти готовый “3 в 1”, например такой (24 г, макс входное напряжение до 28 Вольт, выходы по 3А). К нему будет подключен датчик тока (22 г), чтобы была возможность измерять расход мАч на аккумуляторе.
Комплект электроники + камера + подвес + система питания весят 505 г.
Моторы и пропеллеры
На многих профессиональных дронах я видел моторы и пропеллеры компании T-Motor. Видимо, не спроста. В документации Ardupilot они также рекомендованы как силовая установка для профессиональных дронов. Поэтому, поищем подходящие моторы у них.
Чтобы дрон летал долго, нужны моторы с максимальным КПД. Эффективность связки мотора и пропеллера измеряется количеством тяги в граммах на 1 Ватт затраченной электроэнергии.
Чтобы узнать какой мотор самый подходящий, нужно знать общий вес полностью собранного дрона с учетом рамы, аккумулятора и самих моторов с винтами.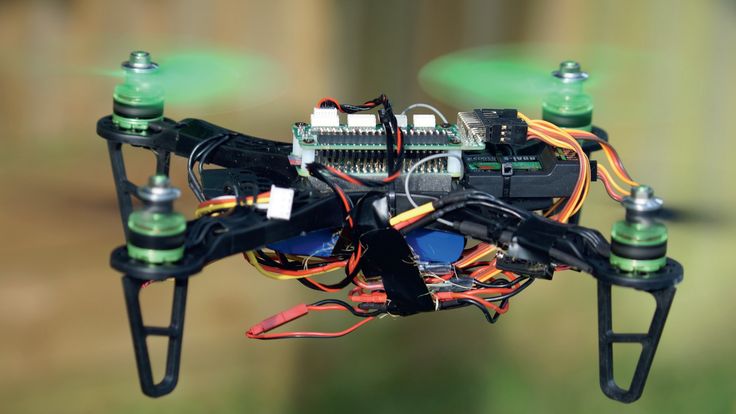 Аккумулятор нужен такой, чтобы его хватило минут на 30 полета. Рама нужна такая, чтобы на нее все поместилось и винты ничего не задевали.
Аккумулятор нужен такой, чтобы его хватило минут на 30 полета. Рама нужна такая, чтобы на нее все поместилось и винты ничего не задевали.
Слишком много неизвестных, поэтому воспользуюсь онлайн калькулятором для квадрокоптеров E-calc.
Поигравшись в калькулятор, я выбрал моторы Antigravity 4004 KV300 (53 г) с винтами 15х5 (27 г). В оптимальном режиме при напряжении питания 24 Вольта такой комплект тянет 474 грамма при токе 1,4 А. Эффективность получается 14.11 г/Ватт, отношение тяги к собственному весу = 5.9:1. На полном ходу тяга составляет 1311 грамм при токе 7,5 А. Коптер будет с четырьмя моторами, то есть квадро. Оптимальный взлетный вес = (474 г * 4 мотора) = 1896 г, максимальный (с учетом тяговооруженности 2:1) = (1311 г * 4 мотора) / 2 = 2622 г.
Моторы управляются регуляторами оборотов. Напряжение питания моторов = 24 Вольта, максимальный рабочий ток = 7,5 А, поэтому нужен регулятор под такое напряжение и с рабочим током, с учетом запаса, минимум 10А. У T-Motor самый легкий регулятор (7 г без проводов) под такое напряжение — это FPV 35A-32bit 3-6S. Он сделан на основе популярной прошивки BLHeli-32, с закрытым кодом, но с широкими возможностями настроек и большим числом аналогов.
Он сделан на основе популярной прошивки BLHeli-32, с закрытым кодом, но с широкими возможностями настроек и большим числом аналогов.
Подитог:
ВМГ (винто-моторная группа), состоящая из моторов, пропеллеров и регуляторов (по 4 шт каждого) весит 346 г.
Вместе с электроникой и полезной нагрузкой (346 + 505) получается 851 г. С учетом крепежа, проводов и разъемов (прикинем +100 г) = 951 г.
При оптимальном весе, на раму и аккумулятор остается (1896 — 951) = 945 г. При максимальном (2622 — 951) = 1671 г.
Рама
Рассчитаем минимальный размер рамы, чтобы выбранные 15-дюймовые пропеллеры не мешали друг другу создавать тягу. Размеры рамы производители указывают в расстоянии между осями моторов, расположенных по диагонали друг от друга.
По картинке можно узнать гипотенузу, которая вычисляется из катета, равного сумме диаметра винта и расстояния между пропеллерами. Соседние лопасти 15-дюймового винта будут крутиться в 1 миллиметре друг от друга при диагонали рамы 540 мм. Добавим немного пространства и размер подходящей рамы будет равен примерно 600-700 мм.
Добавим немного пространства и размер подходящей рамы будет равен примерно 600-700 мм.
В продаже найти таких можно много, например, раз: 600мм и 750г, два: 650мм и 450г, три: 690 и 675г, четыре: 650мм и 750г. Все они отличаются исполнением и наличием складных элементов (шасси, лучи) для удобства транспортировки.
Выбор конкретного экземпляра для своих нужд пока отложу, для дальнейшего расчета буду иметь в виду вес рамы равный 450 г.
Остается аккумулятор весом 495 г для оптимального веса и 1221 г для максимального.
Аккумулятор
Для выбора аккумулятора нужно знать какой он должен отдавать ток.
На полном ходу двигатели будут “есть” 30А (7,5А * 4 мотора), а электроника примерно 0,45А (10 Ватт). С учетом небольшого запаса округлим минимальный рабочий ток аккумулятора в 35А. Для Li-Po батарей с высокой токоотдачей в 30С минимальная емкость будет равна 1,2 Ач (35/30), а для более легких Li-Po и Li-Ion с токоотдачей в 10С минимальная емкость 3,5 Ач (35/10).
Как вариант, сборка 6S2P из Li-Ion Sony VTC6 с BMS весит примерно 630 г (при емкости 6 Ач). С этим аккумулятором дрон будет весить 2031 г, что больше оптимального на 135 г, но в пределах максимального. Теперь посчитаем на какое время коптер сможет зависнуть при идеальных условиях. При общем весе в 2031 г на каждый мотор приходится 508 г. Взглянем на характеристики мотора и найдем потребляемый ток при такой тяге. Он примерно будет равен 1,6А. 4 мотора и электроника дадут в сумме 6,85A (1,6 * 4 + 0,45). С учетом разрядки аккумулятора до 20% получится (6 Ач * 80% / (6,85 A)) = 0,7 часа или 42 минуты.
Компоновка
Пока я выбирал подходящую раму и думал как все это на ней размещать и чем крепить, пришел к выводу, что проще будет нарисовать несколько деталей и заказать 3D-печать из пластика и фрезеровку из карбона. Пару готовых железок и крепеж можно заказать на Алиэкспрессе.
Немного поэкспериментировав с компоновкой и центром тяжести, получилась вот такая рама:
Она состоит из карбоновых трубок и пластин, деталей из алюминия и крепежа из титана. Расчетный вес рамы получился 350 г при диагонали 700 мм. 3D-модель рамы и список деталей.
Расчетный вес рамы получился 350 г при диагонали 700 мм. 3D-модель рамы и список деталей.
Полностью собранная модель (без проводов):
Общий вес коптера с электроникой, аккумулятором Li-Ion 6S2P и проводами должен получится 1931 г.
Да, мне тоже показалось, что дрон получился слишком голым для автономного варианта и мелкий дождик легко намочит бортовую электронику. Поэтому добавил немного пластика:
3D-модель рамы. Список деталей рамы.
3D-модель в сборе. Список компонентов.
Вес пустой рамы с корпусом 384 г, общий вес 2020 г, расчетное время висения на одной зарядке (разряд аккумулятора до 20%): 44 минуты.
Бокс для зарядки
Бокс для зарядки будет сделан из алюминиевого профиля, крепежной фурнитуры и алюминиевых сендвич-панелей. В нем будут установлены роутер, компьютер, погодные датчики и камера с видом на посадочную зону. Я решил сделать покатую крышу из двух створок, чтобы зимой на ней не скапливался снег и не мешал открыванию. Механизм открывания створок до конца еще не продуман, а также не определена система зарядки (нуждаюсь в подсказках).
Механизм открывания створок до конца еще не продуман, а также не определена система зарядки (нуждаюсь в подсказках).
В следующей статье я расскажу как настроить и запустить дрон через интернет с помощью GUI или командной строки, про варианты систем зарядки из которых я сейчас выбираю, ПО для управления коптером и анализа снимков и почему мой первый полет через интернет продлился так недолго:
Продолжение следует…
Часть 2 про ПО.
Урок 7. FPV и расстояние удаления.
Содержание
- Дрон своими руками: Урок 1. Терминология.
- Дрон своими руками: Урок 2. Рамы.
- Дрон своими руками: Урок 3. Силовая установка.
- Дрон своими руками: Урок 4. Полётный контроллер.
- Дрон своими руками: Урок 5. Сборка.
- Дрон своими руками: Урок 6. Проверка работоспособности.
- Дрон своими руками: Урок 7. FPV и расстояние удаления.
- Дрон своими руками: Урок 8. Самолёты.
Введение
Первые шесть уроков рассматривают конструкторские соображения, лежащие в основе создания специального многомоторного БПЛА/Дрона. 7 урок, не раскрывает аспектов сборки, а описывает ряд дополнительных аксессуаров/устройств, используемых для реализации полёта от первого лица (FPV) и управления на большом расстоянии. Эта статья больше ориентирована на применение радиоуправления в «полевых условиях»; в отличие от полёта внутри помещений или в местах, где розетки могут обеспечить питание. Обратите внимание, урок охватывает только очень небольшую часть информации, необходимой для правильного понимания FPV/Систем дальнего радиуса действия, и предназначена главным образом для ознакомления читателя с понятиями, терминами, продуктами и принципами, лежащими в основе FPV и управления дроном на больших расстояниях.
7 урок, не раскрывает аспектов сборки, а описывает ряд дополнительных аксессуаров/устройств, используемых для реализации полёта от первого лица (FPV) и управления на большом расстоянии. Эта статья больше ориентирована на применение радиоуправления в «полевых условиях»; в отличие от полёта внутри помещений или в местах, где розетки могут обеспечить питание. Обратите внимание, урок охватывает только очень небольшую часть информации, необходимой для правильного понимания FPV/Систем дальнего радиуса действия, и предназначена главным образом для ознакомления читателя с понятиями, терминами, продуктами и принципами, лежащими в основе FPV и управления дроном на больших расстояниях.
Вид от первого лица (FPV)
Вид от первого лица (FPV — First Person View) — одно из основных движущих сил стремительно растущей популярности мультимоторных БЛА, позволяющая получить совершенно иную перспективу («вид с высоты птичьего полёта») нашей планеты и само ощущение полёта. Несмотря на то, что добавление камеры к БПЛА не является чем-то новым, относительная простота управления, низкая цена и широкий ассортимент дронов, позволяют легко купить или создать беспилотный летательный аппарат с камерой.
Вид от первого лица (FPV) в настоящее время реализуется посредством предустановленного на коптер тандема, состоящего из FPV камеры и видеопередатчика, что позволяет в режиме реального времени отправлять видео пилоту или ассистенту. Обратите внимание, что на рынке предлагаются готовые, либо полуготовые FPV системы, где в свою очередь, готовые FPV системы обеспечивают уверенность пользователя в том, что все её элементы совместимы друг с другом.

Видеокамера
- Практически любая видеокамера, которая имеет возможность подключения к видеопередатчику, может использоваться для реализации FPV полёта, тем не менее, важно учитывать вес, так как многомоторные БЛА постоянно борются с гравитацией и не имеют преимуществ крылатого воздушного судна для обеспечения дополнительного подъёма.
- Видеокамеры бывают самых разных форм и размеров, а также могут иметь различный потенциал в качестве съёмки, тем не менее в настоящее время далеко немногие адаптированы специально для БПЛА.
- Большие камеры, такие как DSLR (зеркальные) или крупные видеокамеры, обычно используются профессионалами, но из-за своего веса требуемый дрон имеет тенденцию быть довольно большим.
- Некоторые видеокамеры могут питаться напрямую от источника питания 5В (полезно, поскольку большинство контроллеров полёта также работают при 5В, питаясь от BEC), в то время как другим может потребоваться 12В или даже своя собственная встроенная аккумуляторная батарея.
- Самой популярной камерой, используемой в настоящее время на многомоторных БПЛА является — GoPro. Это связано с их прочностью, небольшими размерами, высоким качеством видео/фото, встроенным аккумулятором, широким ассортиментом аксессуаров и доступностью по всему миру. Камеры GoPro также имеют USB выход, который можно использовать для передачи видео, а некоторые даже имеют встроенный WiFi модуль для передачи видео на короткие расстояния.
- Учитывая успех GoPro, многие другие производители создали свои собственные аналогичные линии спортивных/экшн-камер, но их характеристики, цена, и качество разнятся. Обратите внимание, что если вам потребуется 3D-видео, вам понадобятся две камеры и видеопередатчик, способный передавать два сигнала.
 Из-за этих ограничений по размеру, весу и производительности, большинство камер используемых в многомоторных FPV-системах, пришло от «экшн-камер», а также от приложений видеонаблюдения и индустрии безопасности (например, скрытые камеры).
Из-за этих ограничений по размеру, весу и производительности, большинство камер используемых в многомоторных FPV-системах, пришло от «экшн-камер», а также от приложений видеонаблюдения и индустрии безопасности (например, скрытые камеры).
Подвес
Система подвеса включает в себя механическую раму, два или более мотора (обычно до трёх для панорамирования, наклона и крена), а также датчики и электронику. Камера установлена таким образом, что двигатели не должны обеспечивать угловое усилие (крутящий момент), чтобы держать камеру под фиксированным углом («сбалансированным»).
Оси, о которых идёт речь, позволяют панорамировать, наклонять или поворачивать камеру. 1-осевая система, которая не имеет собственного датчика, может рассматриваться как система панорамирования или наклона. Наиболее популярная конструкция включает в себя установку двух моторов (обычно BLDC двигатели, специально разработанные для использования с подвесами), которая управляет наклоном и поворотом камеры.
3-осевой подвес добавляет панорамирование (влево и вправо) и наиболее полезен в тандеме с двумя операторами, когда один человек управляет дроном, а другой может независимо управлять камерой. В такой конфигурации для двух человек также может быть задействована вторая (фиксированная) курсовая камера для пилота. Как правило, существует один из двух видов карданных систем:
Бесколлекторный подвес
- Бесколлекторные моторы постоянного тока (BLDC — Brushless Direct Current Motor) или (PMSM — Permanent Magnet Synchronous Motor) или (Вентильные электродвигатели (ВД)) — обеспечивают быструю реакцию с минимальной вибрацией, однако требуют присутствия отдельного (и специализированного) бесколлекторного контроллера постоянного тока.
- Чтобы автоматически поддерживать уровень камеры, где-то вокруг камеры (обычно под её креплением) устанавливается инерциальный измерительный блок (IMU), состоящий из акселерометра и гироскопа, так чтобы положение камеры (относительно земли) можно было отслеживать.
- Сама плата контроллера включает в себя встроенный микроконтроллер. Бесколлекторный контроллер постоянного тока карданного подвеса обычно можно подключить непосредственно к каналу на приёмнике (в отличие от контроллера полёта), поскольку он реагирует на изменения ориентации камеры, а не ориентации БПЛА, и, следовательно, не зависит от контроллера полёта.
- Обратите внимание, что поскольку GoPro является популярной экшн-камерой, большинство бесколлекторных подвесов созданы для использования с одной или несколькими моделями GoPro (исходя из размеров GoPro, центра масс, местоположения камеры и т.д.). Вы также заметите, что BLDC подвесы почти всегда имеют демпфирование, которое сводит к минимуму вибрацию, передаваемую от дрона к камере.
Радиоуправляемый сервоподвес
- В основе радиоуправляемого сервоподвеса — сервопривод, как правило, предлагает более медленное время отклика, по сравнению с бесколлекторными подвесами, и излишнюю вибрацию. При этом сервосистемы значительно дешевле бесколлекторных, а 3-контактные сервоприводы в большинстве случаев могут быть подключены непосредственно к полётному контроллеру, что позволяет воспользоваться встроенным в ПК — IMU, для определения уровня относительно земли, и последующего перемещения сервоприводов.
 Показания блока отправляются на отдельную плату бесколлекторного контроллера постоянного тока (часто устанавливаемую прямо над подвесом), который вращает моторы, так, что положение камеры остаётся в определенной ориентации, несмотря на любое перемещение дрона.
Показания блока отправляются на отдельную плату бесколлекторного контроллера постоянного тока (часто устанавливаемую прямо над подвесом), который вращает моторы, так, что положение камеры остаётся в определенной ориентации, несмотря на любое перемещение дрона.
Видеопередатчик (VTX)
В настоящее время немногие контроллеры полёта (за исключением готовых к работе БЛА массового потребительского рынка) имеют встроенный видеопередатчик, это означает, что обычно требуется отдельное VTX дооснащение. Видеопередатчики, используемые в беспилотном хобби, в настоящее время популярны, так как они лёгкие и маленькие. Можно использовать и другие видеопередатчики сторонних разработчиков, но, в таком случае должны учитываться некоторые важные соображения касательно подключения питания (может потребоваться настройка, если устройство принимает питание только от «Barrel» разъёма), а также входного напряжения; Если видеоустройство работает при напряжении, которого нет на борту вашей сборки, где, вам может потребоваться дополнительная электроника, например, регулятор напряжения.
Мощность видеопередатчика
Видеопередатчики обычно рассчитаны на определенную выходную мощность, но не следует полагать, что кто-либо может использовать любую номинальную мощность, доступную на рынке. Беспроводные частоты и мощность тщательно отслеживаются и регулируются, поэтому настоятельно рекомендуется ознакомиться с правилами беспроводной связи в стране где вы находитесь.
Мощность, которую потребляет видеопередатчик, напрямую влияет на максимальную дальность его сигналов. В Северной Америке для работы беспроводного передатчика, который потребляет энергию выше определенной (в Ваттах), требуется, чтобы оператор имел лицензию радиолюбителя (HAM). Например, в Канаде, FPV оператору большой дальности обычно требуется пройти, по крайней мере, «Базовый квалификационный тест радиолюбителя», чтобы работать на мощности, необходимой для беспроводных приложений большой дальности.
Если вы не имеете никакой квалификации, настоятельно рекомендуется использовать видео передатчик менее 200 мВт, чтобы избежать риска судебных исков (власти могут связаться с вами, если ваш сигнал начнет мешать другим беспроводным сигналам).
Питание для видеопередатчика обычно подается от BEC от одного из ESC, который также питает остальную часть электроники. Если вы подозреваете, что вся электроника потребляет больше тока, чем может обеспечить один BEC, вы можете использовать BEC от второго ESC для питания VTX. Использовать отдельную батарею для питания видеопередатчика не рекомендуется.
Частоты/Каналы видеопередатчика
Большинство видеопередатчиков работают на одной из ниже перечисленных частот. Обратите внимание, что, поскольку вы, вероятно, уже будете использовать стандартную аппаратуру управления, которая работает на определенной частоте, правильным будет выбрать видеопередатчик так, чтобы их частоты не совпадали. Например, если ваше пульт управления работает на частоте 2.
900МГц (0.9ГГц)
- Низкочастотный сигнал легче проникает через стены и деревья
- DIY антенны легко сделать, потому что низкие частоты подразумевают большие антенны
- Качество изображения не такое хорошее, как на 5.8ГГц
- Может оказать негативное влияние на GPS приёмники
- Считается «старой» технологией
- В целом, лучший для среднего диапазона
1.2ГГц (от 1.2 до 1.3 ГГц)
- Используется для дальних FPV полётов, поскольку предлагает хорошее расстояние
- Много разных антенн на рынке
- Частота, как правило, используется множеством других устройств
- Стены и препятствия оказывают большее влияние, чем более низкая частота
- Средний/длинный диапазон
2.4ГГц (от 2.3 до 2.4ГГц)
- Используется для FPV на большие расстояния с небольшим количеством препятствий
- Одна из наиболее широко используемых частот для беспроводных устройств
- Доступны многие аксессуары (антенны, передатчики и т.
- Не следует использовать рядом с параллельно работающими на аналогичной частоте RC передатчиками или другими устройствами, которые могут создавать помехи.
- Может работать с другими частотами, но не будет рассмотрено в этом разделе.
5.8ГГц
- Отлично подходит для применения на малых расстояниях
- Стены и другие препятствия оказывают существенное влияние на дальность
- Антенны маленькие/компактные
- Лучше всего подходит для FPV в дрон-рейсинге
Как вы, могли, заметить, многие обычные беспроводные устройства работают на частоте 2.4ГГц (беспроводные маршрутизаторы, беспроводные телефоны, Bluetooth, устройства для открывания гаражных ворот и т.д.). Во многом это связано с тем, что в государственных нормативных актах Федеральной комиссии связи, определено, что полосе частот вокруг этого диапазона не требуется лицензия для работы; то же самое для 900МГц, 1.2ГГц и 5.8ГГц (в пределах определенного диапазона мощности). К без лицензионному частотному диапазону относится так называемый свободный ISM диапазон (с англ.
Разъёмы видеопередатчика
Не все видеопередатчики имеют одинаковые разъёмы, поэтому важно знать, какой разъём установлен в выбранной камере, а также, посмотреть, возможно ли подключение и работа с выбранным видеопередатчиком. Самые популярные разъёмы — композитные, мини/микро USB и 0.1-дюймовые разъёмы (аналоговые). На рынке имеется ряд адаптеров/переходников, например: 0.1″ FPV Tx разъём — miniUSB для использования с камерой GoPro, что значительно упрощает использование таких продуктов.
Некоторые видеопередатчики также могут иметь аудиовход, тем не менее в большинстве случаев шум издаваемый силовой установкой будет заглушать любой звук, который вы надеетесь записать.
Антенна видеопередатчика
Антенны видеопередатчика, используемые на беспилотных летательных аппаратах, имеют тенденцию быть либо «Duck», либо «Whip». Duck антенны являются наиболее распространёнными и имеют преимущество в том, что они являются всенаправленными, компактными, недорогими и остаются неподвижными во время полёта из-за их небольшого профиля.
Выбор антенны должен соответствовать частоте видеопередатчика. Более высокие частоты требуют небольших антенн, однако передаваемые сигналы испытывают большие трудности при прохождении через препятствия. Низкие частоты менее подвержены помехам, но требуют больших/длинных антенн. Направленная антенна не очень часто используется для передачи видео, так как БПЛА может фактически находится в любой ориентации в трёхмерном пространстве. В идеале антенна должна быть расположена где-то на БПЛА, где нет источников других беспроводных сигналов или электрических помех.
 Видеопередатчики не затрагивающие беспилотное хобби, редко удовлетворяют по таким параметрам как вес или размер, и как правило заключены в защитный кейс (а иногда, неоправданно тяжелый).
Видеопередатчики не затрагивающие беспилотное хобби, редко удовлетворяют по таким параметрам как вес или размер, и как правило заключены в защитный кейс (а иногда, неоправданно тяжелый).
 4 ГГц, вам следует обратить внимание на видеопередатчик с рабочей частотой: 900 МГц, 1.2ГГц или 5.8ГГц.
4 ГГц, вам следует обратить внимание на видеопередатчик с рабочей частотой: 900 МГц, 1.2ГГц или 5.8ГГц. д.)
д.) Industrial, Scientific, Medical: индустриальный, научный и медицинский диапазон), занимает полосу частот: от 2400 до 2483.5МГц в США и Европе и от 2471 до 2497МГц в Японии. Это означает, что любой потребитель может приобрести беспроводное устройство, которое работает на одной из этих частот, не беспокоясь о правилах или рекомендациях. Более подробную информацию о любительском распределении радиочастот можно найти в Википедии.
Industrial, Scientific, Medical: индустриальный, научный и медицинский диапазон), занимает полосу частот: от 2400 до 2483.5МГц в США и Европе и от 2471 до 2497МГц в Японии. Это означает, что любой потребитель может приобрести беспроводное устройство, которое работает на одной из этих частот, не беспокоясь о правилах или рекомендациях. Более подробную информацию о любительском распределении радиочастот можно найти в Википедии. Если вам нужен звук, обязательно расположите микрофон как можно дальше от моторов (потребуется немало испытаний, чтобы найти макс. оптимальное место) и выберите совместимый приёмник.
Если вам нужен звук, обязательно расположите микрофон как можно дальше от моторов (потребуется немало испытаний, чтобы найти макс. оптимальное место) и выберите совместимый приёмник.
Видеоприёмник (VRX)
Видеоприёмник имеет тенденцию быть немного (физически) больше и тяжелее, видеопередатчика, потому что приёмник как правило неподвижен (подключён к экрану), в то время как передатчик устанавливается на дроне и, как таковой, должен быть маленьким и лёгким. Чтобы сэкономить место, некоторые производители ЖК-дисплеев включают в свои дисплеи стандартно частотные беспроводные приёмники.
Многие FPV энтузиасты устанавливают на свои FPV очки антенны типа «Clover Leaf» или «Pinwheel», что позволяет им ориентировать свою голову в направлении беспилотника и тем самым добиваться максимально мощного сигнала. Некоторые производители FPV очков также поддержали эту тенденцию и стали включать в комплектацию своих очков беспроводной видеоприёмник и антенну.
Очевидно, что частота, на которой работает видеоприёмник, должна соответствовать частоте передатчика. Некоторые модели приёмников, однако, предлагают широкий выбор каналов (по одному), что делает их совместимыми с различными видеопередатчиками.
 Выход видеоприёмника имеет тенденцию быть либо композитным (наиболее распространённый), либо HDMI. Что подключить к выходу (видео дисплей), решать вам, и некоторые варианты описаны ниже. Питание приёмника в полевых условиях всегда предполагает использование батареи, которая либо выдает выходное напряжение соответствующее рабочему напряжению приёмника, либо батареи, которая подключена к регулятору напряжения для обеспечения требуемого. Обратите внимание, на то, что нет видеоприёмников «большой дальности», поскольку диапазон сигнала зависит от мощности передатчика и правильно выбранной антенны.
Выход видеоприёмника имеет тенденцию быть либо композитным (наиболее распространённый), либо HDMI. Что подключить к выходу (видео дисплей), решать вам, и некоторые варианты описаны ниже. Питание приёмника в полевых условиях всегда предполагает использование батареи, которая либо выдает выходное напряжение соответствующее рабочему напряжению приёмника, либо батареи, которая подключена к регулятору напряжения для обеспечения требуемого. Обратите внимание, на то, что нет видеоприёмников «большой дальности», поскольку диапазон сигнала зависит от мощности передатчика и правильно выбранной антенны.Антенна видеоприёмника
Антенны, используемые на видеоприёмниках, могут быть всенаправленными (способными принимать сигнал с любого направления) или направленными. Наиболее распространённые антенны, которые можно встретить на видеоприёмнике это: Duck антенна, Cloverleaf/Pinwheel или, в редких случаях, направленная (например, «Yagi»). Направленная антенна будет актуальна только в том случае, когда БПЛА будет летать в определенном направлении по отношению к оператору, а дрон всегда будет «перед» антенной, для того чтобы не потерять сигнал.
 Ситуации могут включать в себя исследование конкретной зоны (например, поля) или области, которая находится на расстоянии от оператора.
Ситуации могут включать в себя исследование конкретной зоны (например, поля) или области, которая находится на расстоянии от оператора.Видеодисплей
ЖК монитор (LCD монитор)
- При рассмотрении ЖК монитора важно знать различие между настольным/компьютерным ЖК монитором или ЖК телевизором и тем, который предназначен быть портативным. Телевизионный/компьютерный монитор почти всегда имеет разъём питания, совместимый со стандартным компьютерным кабелем питания (потребляет переменный ток напрямую), что делает его очень сложным для использования с АКБ. ЖК/OLED дисплей, который должен быть более портативным, зачастую потребляет постоянный ток и требует внешнего трансформатора для подключения к сети (A/C).
- Размер, частота обновления и качество отображения дисплея, используемого для FPV применения варьируются от небольших мониторов с зернистыми изображениями, те что обновляются несколько раз в секунду, до больших дисплеев, которые в сочетании с правильным видеопередатчиком и приёмником, отображают большие HD изображения без каких либо явных задержек.
FPV очки
- 2D-очки широко используются в FPV из-за их более доступной цены, совместимости с одним источником видеосигнала (с одной видеокамеры) и простоты использования с внешним аккумулятором. Некоторые модели включают в себя видеоприёмник; комплекты приходят с камерой, видеопередатчиком, FPV очками (с встроенным видеоприёмником) и внешним аккумулятором, а также обеими антеннами.
- Качество видео, предлагаемое недорогими FPV очками, может быть довольно низким, поэтому если бюджет имеет значение, примите во внимание, что вы можете получить лучшее впечатление от ЖК-монитора большего размера по той же цене, что и FPV очки.
Отслеживание головы
- Отслеживание головы по существу тоже самое, что и отслеживание движения, а именно, измерение трехмерной ориентации/углов в отличие от линейного движения.
3D/Виртуальная реальность
- Occulus Rift, Samsung Gear, Morpheus, VR-очки на базе смартфона и множество других 3D/VR-дисплеев с головным креплением могут быть адаптированы для использования с беспилотниками. Несмотря на то, что эти устройства обычно создаются для трёхмерных компьютерных/консольных игр или в качестве альтернативы телевизору, эти устройства изначально совместимы с 3D и зачастую имеют встроенные датчики трекинга головы, становясь всё более интересными для беспилотного FPV сообщества.
Smart устройства
- Смартфоны, планшеты или ноутбуки могут быть использованы для отображения видео в режиме реального времени. Их батареи являются встроенными, а сами устройства лёгкие. Сложность использования интеллектуальных устройств заключается в том, что большинство приёмников не предназначены для приёма видеосигнала от беспроводного видеоприёмника (один из двух проводной или беспроводной). Ноутбук или планшет с встроенной или USB-видеокартой может получать нормальное композитное видео. Смартфон в настоящее время лучше всего работает с видео, отправляемым по Wi-Fi (от Wi-Fi камеры к Wi-Fi адаптеру). Использование Wi-Fi видеосигнала GoPro и мобильного приложения является одним из самых простых способов реализации FPV, однако стоит отметить, что диапазон сигнала Wi-Fi камеры сильно ограничен (10-20 метров). Поскольку смартфоны широко распространены, а беспилотники — последний писк моды, производители регулярно выпускают новые продукты, из которых извлекают выгоду, поэтому прежде чем принять решение, хорошенько подумайте.
Экранное меню (OSD)
- Экранное меню (OSD) позволяет пилоту видеть различные сенсорные данные, отправляемые с дрона. Одним из самых простых способов выведения данных на экран является использование камеры с аналоговым выходом и размещение экранной платы между выходом камеры и видеопередатчиком. Плата OSD адаптера имеет входы для различных сенсоров и будет накладывать данные на видео, таким образом пилот получит видео с уже наложенными данными телеметрии.
 Имейте в виду, что любой выбранный вами 2D-дисплей должен быть подключен к источнику питания и установлен, либо внутри базовой станции БПЛА (описанной ниже), либо посредством крепления FPV монитора на аппаратуре управления.
Имейте в виду, что любой выбранный вами 2D-дисплей должен быть подключен к источнику питания и установлен, либо внутри базовой станции БПЛА (описанной ниже), либо посредством крепления FPV монитора на аппаратуре управления.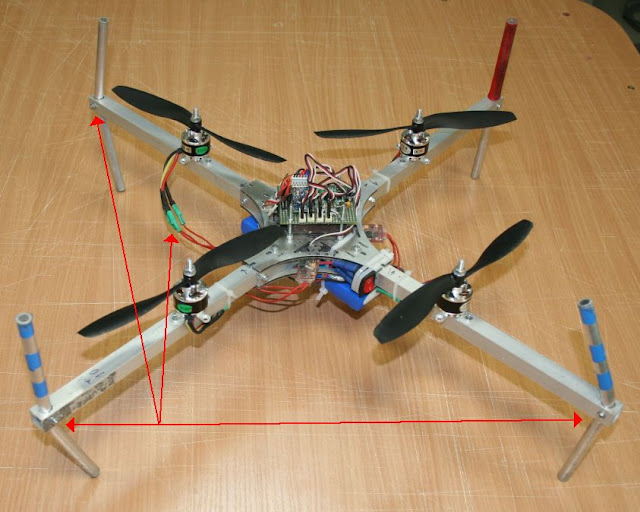 Сенсорный комплекс составляют чипы MEMS акселерометра, гироскопов или инерциальных измерительных модулей (IMU). Датчики устанавливаются (или встраиваются) в FPV/VR очки и отправляют данные в микроконтроллер для интерпретации данных датчика в виде углов, который затем отправляет данные, либо посредством аппаратуры управления (для моделей более высокого уровня), либо через отдельное беспроводное передающее устройство. Идеальная система отслеживания головы совместима с передатчиком, таким образом углы могут быть отправлены с помощью передатчика по двум свободным RC каналам.
Сенсорный комплекс составляют чипы MEMS акселерометра, гироскопов или инерциальных измерительных модулей (IMU). Датчики устанавливаются (или встраиваются) в FPV/VR очки и отправляют данные в микроконтроллер для интерпретации данных датчика в виде углов, который затем отправляет данные, либо посредством аппаратуры управления (для моделей более высокого уровня), либо через отдельное беспроводное передающее устройство. Идеальная система отслеживания головы совместима с передатчиком, таким образом углы могут быть отправлены с помощью передатчика по двум свободным RC каналам.

Соображения касательно расстояния удаления
- Как вы уже успели заметить, работа на большом расстоянии зависит главным образом от мощности передатчика (аппаратуры управления, а также видео, если применимо). Обычно RC-передатчики включают в себя RF-систему, состоящую из джойстиков и переключателей, электроники и RF-передатчика, и менее дорогих RC-элементов, эта система почти всегда представляет собой единое целое. Модели более высокого уровня часто имеют радиочастотный модуль, который можно заметить в виде коробки, расположенной на тыльной стороне аппаратуры управления.
 В Северной Америке это также законное требование, чтобы БПЛА оставался в поле зрения пилота (для информации). Тем не менее законы меняются, поэтому лучше проконсультироваться, прежде чем пытаться выполнять беспилотные операции на больших расстояниях.
В Северной Америке это также законное требование, чтобы БПЛА оставался в поле зрения пилота (для информации). Тем не менее законы меняются, поэтому лучше проконсультироваться, прежде чем пытаться выполнять беспилотные операции на больших расстояниях.Питание
БПЛА/Дрон
Ваш БПЛА/Дрон состоит из множества различных частей, каждая из которых требует определенного напряжения. Наиболее распространенная электроника, которую вы найдете в FPV системе или дроне дальнего действия, включает в себя:
- Двигатели: большинство двигателей БПЛА среднего размера, как правило, работают при напряжении 11.1В или 14.8В.
- Контроллер полёта, приёмник, GPS: в идеале они должны получать питание от BEC от одного из ESC.
- Приёмник отслеживающий положение головы: он будет также работать от BEC.
- Сервоподвес: Сервоприводная система подвеса может получать питание от одного из BEC на ESC и работать при напряжении 5В.
- BLDC подвес: Некоторые BLDC подвесы могут подключаться к зарядному разъёму основного аккумулятора, в то время как другим может потребоваться определенное напряжение. Проверьте характеристики подвеса, который вы покупаете.
- Камера: Камеры, используемые для FPV полёта, имеют тенденцию работать при 5В (от BEC) или 12В (от основного аккумулятора). Большинство экшн-камер имеют собственную встроенную батарею.
- Видеопередатчик: Большинство работает при 5В и может питаться от BEC.
- Дополнительная электроника (освещение, парашют и т.д.): 5В.
Рекомендуется чтобы в БПЛА была только одна основная батарея, и вам следует рассмотреть возможность использования АКБ 11.1В или 14.8В на дроне среднего размера. Если не один ESC не имеет BEC, вам понадобится внешний 5В стабилизатор напряжения для питания электроники, и убедитесь, что он сможет обеспечить достаточный ток для всего.
Пилот
В то время как обычному пользователю беспилотника нужно беспокоиться только о работоспособности аппаратуры управления, пилот полноценной FPV установки может в конечном итоге переносить большие АКБ, и разнообразное дополнительное оборудование.
- Портативная аппаратура управления: Большинство пультов по умолчанию питаются от батареи типа «AA» (4 × AA или 8 × AA), но для FPV может потребоваться питание аппаратуры от внешнего АКБ.
- Дополнительный RF-передатчик: Если вы не используете RF-передатчик/Приёмник, входящий в комплект поставки пульта дистанционного управления, модели более высокого уровня обычно имеют питающий выход, к которому можно подключить этот модуль. Кроме того, вы можете запитать его к внешней аккумуляторной батареи, питающей пульт дистанционного управления.
- Приёмник отслеживающий положение головы: Обычно это блок может питаться от 5В.
- Видеоприёмник: Большинству требуется 12В, но часто они имеют довольно широкий диапазон входного напряжения. Чаще всего приёмник поставляется с сетевым адаптером, который вы не будете использовать в полевых условиях. Проверьте диапазоны входного напряжения, чтобы увидеть, можете ли вы использовать одно напряжение для питания передатчика и приёмника (например, 7.
- Видеодисплей: Обязательно выберите портативный ЖК-дисплей с «Barrel» разъёмом, что позволит использовать батарейный блок для ввода. FPV очки, как правило, также имеют вход под «Barrel» разъём, но не забудьте проверить. Наиболее распространенное напряжение для портативных ЖК-дисплеев составляет 12В, что может быть не самым лучшим для других устройств.
- Антенный трекер: Описан ниже. Это моторизованное устройство часто состоит из радиоуправляемых серводвигателей, микроконтроллера и дополнительных сенсоров /электроники. Существует очень мало коммерческих систем для рынка беспилотного хобби, поэтому если вы будете заниматься проектированием и созданием такой системы, вам нужно будет разработать настройку питания.


 4В или 12В).
4В или 12В).Базовая станция
Как уже было сказано выше, есть много оборудования, которое пилоту необходимо переносить и питать, и что оно может быть очень громоздким. Базовые станции часто используются для освобождения оператора от этого бремени/неразберихи и могут состоять из любого количества различного оборудования и отсеков, перечисленных ниже.
Базовая станция может включать в себя:
- Основную батарею, возможно, используемую для питания ЖК-монитора и/или FPV очков и, возможно, видеоприёмника.
- Вспомогательную батарею для передатчика и/или видеоприёмника.
- Крепление для ЖК-монитора и/или место для FPV очков.
- Крепление для видеоприёмника.
- Место для хранения аппаратуры управления.
- Крепление для антенны большой дальности (или место для переносной направленной антенны)
- Место для зарядного устройства для основного аккумулятора (ов).
- Место для запасных частей для дрона (пропеллеры, моторы, аккумуляторы, элементы рамы).
«Базовая станция» не обязательно является коммерчески произведенным продуктом, который легко может быть использован с любым беспилотным применением, напротив, она может быть спроектирована и построена пилотом-любителем самостоятельно.
 Не трудно представить, что от того, как хорошо собрана базовая станция, проведены жгуты проводов, соединяющих все эти устройства вместе, зависит исход подготовки к полёту.
Не трудно представить, что от того, как хорошо собрана базовая станция, проведены жгуты проводов, соединяющих все эти устройства вместе, зависит исход подготовки к полёту. Обычно создание базовой станции начинается с выбора прочного футляра для переноски (например, Pelican или Nanuk), хотя также можно использовать/адаптировать рюкзак с жесткой рамой. Часто для установки антенны повыше от земли используется штатив.
Обычно создание базовой станции начинается с выбора прочного футляра для переноски (например, Pelican или Nanuk), хотя также можно использовать/адаптировать рюкзак с жесткой рамой. Часто для установки антенны повыше от земли используется штатив.Антенный трекер
Антенный трекер — это электромеханическое устройство, которое отслеживает положение дрона в трёхмерном пространстве, используя GPS координаты, и, зная местоположение GPS трекера, направляет антенну в сторону беспилотника. Антенные трекеры обычно используются в дальнобойных миссиях, и на рынке не так много коммерческих продуктов. Трекер состоит из GPS приёмника, компаса (а иногда и IMU), микроконтроллера, приёмника данных (для приёма GPS-координат дрона), одного поворотного и одного наклонного мотора, механической рамы, направленной антенны и аккумуляторной батареи. Чтобы уменьшить отрицательное влияние препятствий, системы антенного трекера поднимаются над землей с помощью штатива.
Дрон своими руками: Урок 8.
 Самолёты.
Самолёты.
Содержание
- Дрон своими руками: Урок 1. Терминология.
- Дрон своими руками: Урок 2. Рамы.
- Дрон своими руками: Урок 3. Силовая установка.
- Дрон своими руками: Урок 4. Полётный контроллер.
- Дрон своими руками: Урок 5. Сборка.
- Дрон своими руками: Урок 6. Проверка работоспособности.
- Дрон своими руками: Урок 7. FPV и расстояние удаления.
- Дрон своими руками: Урок 8. Самолёты.
Введение
Использование небольших беспилотных летательных аппаратов для FPV и автономного картографирования становится всё более популярным, особенно на фоне роста популярности дронов для полёта в режиме от первого лица и увеличения доступности деталей. В этой статье рассматриваются несколько соображений касательно вопроса о том, подходит ли самолёт для применения в качестве беспилотника, и, если да, то как выбрать правильный тип.
Мультикоптер vs Самолёт
Какие преимущества может предложить самолёт перед мультикоптером? Несмотря на то, что мультикоптер отлично подходит для увлекательного FPV/автономного полёта, его полезная нагрузка и время полёта все еще ограничены, так как чтобы бороться с гравитацией и удерживать беспилотник в воздухе, несущие винты должны постоянно вращаться (а значит расходовать энергию).
Мультикоптер
- Способен взлетать и приземляться вертикально, а также парить на месте.
- Не требуют большого пространства, на котором можно летать, и являются по существу «всенаправленными», способными очень быстро менять направление полёта и скорость.
- Тяга, создаваемая пропеллерами — это то, что удерживает судно в воздухе.
- Менее интуитивен в полёте, учитывая, что судно может менять ориентацию и летать практически в любом направлении, а подвесы могут легко вызвать дезориентацию.
- Мультикоптеры «среднего размера» диаметром от 400 до 600мм являются наиболее распространенными и, как правило, стоят от 200 до 1000$ США за (настроенную) готовую к полёту установку.
- Несмотря на то, что у мультикоптеров значительно меньше движущихся частей, чем у вертолётов, почти любая неисправность квадрокоптера приводит к аварии.
Самолёт
- Запускается вручную, посредством взлётно-посадочной полосы или катапульты и обычно приземляется на относительно ровную траву или взлётно-посадочную полосу.
- Требуется большое открытое пространство для полёта, поскольку маневренность самолёта ограничена (т.е. всегда необходимо двигаться вперед).
- Крылья создают подъёмную силу.
- Более высокая грузоподъёмность.
- Модели исполненные из пены могут быть снисходительными в случае аварии, и большинство можно будет восстановить/отремонтировать.
- Модели с размахом крыла от 500мм до 1.8м являются наиболее распространенными для использования в хобби, а полная установка обычно стоит от 200 до 1000$ США.
- В случае отказа двигателя все еще есть возможность приземления без повреждения самолёта.
VTOL (вертикальный взлёт и посадка)
- Конструкции включают крылья и пропеллеры (на данный момент не так много коммерческих/серийных продуктов).
- Управление все еще довольно сложное для перехода из вертикального полёта в горизонтальный.
- Конструкции сильно отличаются от квадрокоптеров с крыльями или от использования/удлинения опорных рычагов (лучей) беспилотника для включения профилей крыльев.
- Не будет обсуждаться далее в этой статье.
 Самолёты, напротив, используют свои крылья для создания подъёмной силы. Так какой тип лучше? Не считая электронной начинки, такой как передатчик, приёмник, FPV оборудование, контроллер полёта, приведённые ниже особенности кажутся наиболее актуальными для ответа на поставленный вопрос:
Самолёты, напротив, используют свои крылья для создания подъёмной силы. Так какой тип лучше? Не считая электронной начинки, такой как передатчик, приёмник, FPV оборудование, контроллер полёта, приведённые ниже особенности кажутся наиболее актуальными для ответа на поставленный вопрос:
Соображения
- Место запуска: Из-за постоянно присутствующей возможности причинить вред или ущерб человеку или имуществу, БПЛА/беспилотники запрещено запускать над зданиями, в густонаселённых районах или в местах с массовым скоплением людей. Самолёты в идеале требуют больших открытых площадок, тогда как мультикоптеры могут эксплуатироваться в более ограниченных пространствах. Если у вас нет открытого пространства для полёта, то лучше всего использовать небольшой мультикоптер.
- Применение: Мультикоптер как никогда подходит для аэросъёмки/FPV. Картографию и дальние полёты лучше всего реализовывать посредством самолёта.
- Интерес: Это должно быть одним из весомых факторов при выборе, если вам интересен один тип дрона больше, чем другой.
- Бюджет: Наиболее распространенный мультикоптер (размером 500мм), вероятно, будет немного дороже, чем сопоставимый самолёт (с размахом крыла ≈ 1.5м), но ненамного. Насколько вы готовы потерять беспилотник из-за внезапного сбоя или потери контроля, вызывающие бесконтрольное удаление?
- Время полёта: Среднестатистический квадрокоптер, среднего размера будет оставаться в воздухе в течение 10-15 минут (хотя некоторые производители могут увеличить это время до 30-40 минут), в то время как среднестатистический электрический самолёт среднего размера будет обеспечивать около 20-60 минут + минуты при «нормальном» использовании (т.е. не полный газ), однако в обоих случаях необходимо учитывать множество различных факторов.
- Контроллер полёта: Не все контроллеры способны управлять всеми типами самолётов. Прежде чем выбрать один из некоторых, убедитесь, что интересующий вас тип самолёта поддерживается контроллером полёта (если вы намеревались его использовать).

 Как настроить контроллер полёта в этой статье рассматриваться не будет.
Как настроить контроллер полёта в этой статье рассматриваться не будет.Распространённые типы БПЛА/Дрон крыло
Существует много различных воздушных рам, используемых для создания дронов, но некоторые конструкции используются гораздо чаще других. По мере того, как все больше и больше производителей начинают выпускать изготовленные на заказ аэродинамические рамы для автономного использования, стали исчезать такие ненужные детали, как макет кокпита например, которые обычно можно было встретить на RC самолётах в прошлом.
Дельта крыло (Delta Wing/Летающее крыло)
Летающее крыло — безусловно, самая простая (и, возможно, самая популярная) конструкция. Простая/рудиментарная рама может быть изготовлена с использованием недорогого вспененого пенополипропилена (ЕРР) и базового аэродинамического профиля Кляйна-Фогельмана (Kline-Fogleman или KFm). Они классически имеют только две поверхности управления, это означает, что все повороты осуществляются кренами.
 Пропеллер обычно находится сзади (что позволяет устанавливать камеру спереди), но он точно так же летит с мотором, расположенным в центре или спереди, при условии, что центр тяжести правильный. Великолепная конструкция для своей простоты и, как правило склонна летать на высоких скоростях.
Пропеллер обычно находится сзади (что позволяет устанавливать камеру спереди), но он точно так же летит с мотором, расположенным в центре или спереди, при условии, что центр тяжести правильный. Великолепная конструкция для своей простоты и, как правило склонна летать на высоких скоростях.Моторизованный планер/Планер
Если вы хотите оставаться в воздухе как можно дольше (т.е. самое продолжительное время полёта), такая конструкция — лучший выбор. Как правило может иметь среднее или высокое крыло, а хвост часто имеет Т или V-образную форму. Все представленные здесь рамы могут быть использованы для увлекательного полёта (или более), однако, если вы хотите, чтобы беспилотник как можно дольше находился в воздухе, вам нужно рассмотреть самолёт с большим крылом, и именно в этом планеры превосходны. Они не предназначены для того, чтобы быть самыми быстрыми (скорее самыми медленными) и нести наибольшую полезную нагрузку (они должны быть максимально легкими), зато хорошая конструкция может оставаться в воздухе в течение многих часов.
 Почти у всех винт установлен спереди, поэтому в тех случаях, когда требуется камера, её обычно устанавливают на нижней части/брюхе фюзеляжа.
Почти у всех винт установлен спереди, поэтому в тех случаях, когда требуется камера, её обычно устанавливают на нижней части/брюхе фюзеляжа.«Skywalker»
Конструкция построена на толкающей силовой установке, пропеллер которой установлен сразу за крыльями, а опора хвоста, чтобы не мешать, расположена чуть ниже. Крыло обычно трапециевидное или прямоугольное. В альтернативной конструкции для поддержки хвоста используются две балки (по одной с каждой стороны пропеллера, типа «Twin Boom»). Для размера фюзеляжа, конструкция представляет собой компромисс между планером с большими крыльями и обычным самолётом. Тот факт, что несущий винт находится сзади, означает, что передняя часть может быть оснащена камерой (беспрепятственный обзор). Достаточно высокое расположение несущего винта облегчает запуск вручную, а пропеллер при нормальной посадке (с или без шасси) никогда не будет касаться земли. Такие конструкции, как правило, хороши для максимальной полезной нагрузки, приличной скорости и времени полёта, а также предлагают наибольшую универсальность.

Стандартные
Обычные RC-самолёты по-прежнему часто переделываются для использования в качестве дронов, а проекты варьируются от Мустангов (Sport) до Piper Cubs (Trainer). Почти у всех есть пропеллер, установленный спереди (тянущий или puller). Крылья обычно имеют прямую переднюю/заднюю кромку (прямоугольные), но для копий истребительной авиации крыло может быть более трапециевидным. Такие конструкции чаще всего используются, потому что они являются наиболее распространенным и легко доступным RC самолётом. К сожалению, самолёты не годятся для модификации и включают эстетические элементы, которые не нужны при применении в качестве БЛА. К тому же это не самая удобная конструкция с точки зрения выбора беспрепятственного места для установки камеры. В основе большинства используется дерево, которое не прощает аварий.
Нестандартные
Доступно несколько нестандартных конструкций, одной из которых является «Drak» (почти перевернутая дельта).
 У этой особенной конструкции есть крылья в почти переднем стреловидном положении, и пропеллер сзади. Преимущества и недостатки варьируются в зависимости от модели, хотя их уникальный внешний вид зачастую привлекает к себе немало внимания.
У этой особенной конструкции есть крылья в почти переднем стреловидном положении, и пропеллер сзади. Преимущества и недостатки варьируются в зависимости от модели, хотя их уникальный внешний вид зачастую привлекает к себе немало внимания.Размер
Итак, насколько большим должен быть ваш самолет? Критерий предопределяющий будущий способ транспортировки, к которому часто обращаются ещё до применения. Самолёты (почти) всегда больше мультикоптеров, и поскольку пространство, где вы планируете летать, может находится не рядом с вашим домом или бизнесом, чаще всего транспортировку нужно будет осуществлять автомобилем. Из-за этого размер рамы для дронов такого типа имеет тенденцию быть ограниченным – 2 метрами (размах крыла), и в большинстве случаев крылья должны быть съёмными. Если летающее крыло не может иметь съёмных крыльев, то, размах будет составлять менее 1.2 метра, чтобы их можно было легко разместить на заднем сиденье транспортного средства.
 Классически, RC самолёты стандартного размера имеют размах крыльев от 0.5 – 2м, поэтому доступность деталей для этого размера (двигатель, ESC, аккумулятор, сервоприводы и т.д.) очень хорошая.
Классически, RC самолёты стандартного размера имеют размах крыльев от 0.5 – 2м, поэтому доступность деталей для этого размера (двигатель, ESC, аккумулятор, сервоприводы и т.д.) очень хорошая.Продолжительность полёта
Второй вопрос, который вы могли бы задать себе, это сколько времени самолёт должен оставаться в воздухе. Если вы планируете дистанционно управлять самолётом, стоит принять во внимание, что примерно через 20-30 минут пилотирования, большинство людей устают физически/умственно и стараются завершить полёт. Для долговременных полётов рекомендуется рассматривать планер с размахом крыла не менее 2 метров (с небольшой грузоподъемностью).
Применение
И третье соображение, конечно, является потенциальное применение. В списке распространённых: FPV полёт, картографирование, а также полностью автономный полёт с использованием сенсоров. Для автономного полёта вам необходим контроллер полёта с GPS, а также возможно добавление сенсоров.

Типы комплектов
Проектирование нестандартного самолёта редко является приоритетом для тех, кто хочет просто подняться в воздух для полёта от первого лица или автономного полёта, поскольку это, как правило, требует либо серьезного исследования, либо соответствующих знаний аэродинамики. По этой причине рамы, разработанные специально для FPV/БЛА, становятся все более и более популярными. Тем не менее, учитывая широкую популярность обычных RC самолётов, многие энтузиасты все еще обращаются к существующим RC моделям (не обязательно масштабным моделям) и адаптируют их для FPV/автономного использования.
RTF (Ready to Fly/Готов к полёту) – такой комплект включает в себя всё, что вам нужно, чтобы использовать изделие по назначению, и, как правило, в него входят полностью собранная рама (для более компактной доставки крылья могут демонтироваться) с предустановленной рабочей начинкой (мотор, ESC, сервоприводы, закрылки и т.д.), а также передатчик и приёмник, аккумулятор и зарядное устройство.
 Обычно вы соединяете фюзеляж с крылом (или крыльями), заряжаете, устанавливаете и подключаете аккумулятор, и всё готово к полёту. Это самый быстрый способ попасть в воздух, но при этом такие комплекты не допускают последующего апгрейда.
Обычно вы соединяете фюзеляж с крылом (или крыльями), заряжаете, устанавливаете и подключаете аккумулятор, и всё готово к полёту. Это самый быстрый способ попасть в воздух, но при этом такие комплекты не допускают последующего апгрейда.BNF (Bind and Fly/Привяжи и лети) – беспилотник поставляется почти полностью собранным (для более компактной доставки крылья могут демонтироваться). Комплект не включает приёмник/передатчик. Сборка очень быстрая, учитывая, что все детали уже смонтированы/собраны. Необходимо будет подключить приёмник к сервоприводам и силовой установке, установить аккумулятор и проверить CG (Center of Gravity/Центр тяжести), а затем пройти предполётный контрольный лист запуска, выполнить калибровку. Обратите внимание, что вероятно, потребуется настроить вашу аппаратуру управления для данной модели БЛА. Это второй самый быстрый способ попасть в воздух.
PNF (Plug and Fly/Подключи и лети) – самолёт в основном полностью собран (для более компактной доставки крылья могут демонтироваться).
 Комплект включает ESC, пропеллеры и сервоприводы. Комплект не включает передатчик, приёмник, аккумулятор или зарядное устройство. Необходимо будет подключить приёмник к сервоприводам и силовой установке, выбрать и установить аккумулятор (проверить CG), а затем пройти предполётный контрольный лист запуска, выполнить калибровку. Обратите внимание, что вероятно, потребуется настроить вашу аппаратуру управления для данной модели БЛА.
Комплект включает ESC, пропеллеры и сервоприводы. Комплект не включает передатчик, приёмник, аккумулятор или зарядное устройство. Необходимо будет подключить приёмник к сервоприводам и силовой установке, выбрать и установить аккумулятор (проверить CG), а затем пройти предполётный контрольный лист запуска, выполнить калибровку. Обратите внимание, что вероятно, потребуется настроить вашу аппаратуру управления для данной модели БЛА.PNP (Plug and Play/Подключи и играй) – такой же как PNF комплект.
ARF (Almost Ready to Fly/Почти готов к полёту) – изделия в такой комплектации обычно включают в себя раму и некоторое аппаратное обеспечение. Поставляются частично собранными практически со всеми частями/компонентами рамы необходимыми для её сборки. Может потребоваться некоторое склеивание. Пользователю нужно выбрать свой собственный передатчик, приёмник, мотор, ESC, пропеллер и сервоприводы, поскольку они не входят в комплект.

KIT – в наши дни KIT-самолёты включают планы сборки, но прежде чем самолёт станет достойным полёта пройдёт много времени. Рекомендуется иметь некоторый опыт пилотирования перед тем, как управлять KIT-самолётом, поскольку одна авария (обычно на первом вылете) может привести к многочасовому восстановлению БЛА.
DIY (Do It Yourself/Сделай сам или построенный с нуля) – что, говоря о самолётах, обычно означает совершенно нестандартную конструкцию, которую, возможно спроектировал пилот. Обычно конструктору необходимо выбрать все подходящие компоненты, и зачастую сборка осуществляется методом проб и ошибок.
Строительство
Существует множество различных материалов, используемых для создания рамы, крыльев и хвостового оперения RC самолётов/Дронов. Несмотря на то, что пилотируемые самолёты зачастую используют стекловолокно, алюминий и даже углеродное волокно, производители беспилотных летательных аппаратов пока не применяют таких материалов при изготовлении небольших судов. Ниже приведены наиболее распространенные материалы, которые вы найдёте в отрасли:
Ниже приведены наиболее распространенные материалы, которые вы найдёте в отрасли:
EPO (Expanded PolyOlefin/Расширенный полиолефин) – этот тип пены является лёгким, жёстким и более крепким, чем пенополистирол (EPS). При изготовлении форм позволяет добиться довольно гладкой поверхности. В случае аварии такая пена сжимается, а если усилие избыточно, разрушению будут подвержены самые слабые места. Как правило, детали исполненные из EPO остаются цельными, и если авария не серьёзная пострадавшие элементы можно впоследствии склеить.
EPP (Expanded PolyPropylene/Вспененный полипропилен) – этот тип пены является гибким и эластичным, и хотя он немного тяжелее EPO, он практически не поддается разрушению (для практических целей).
EPS (Expanded PolyStyrene/Вспененный полистирол) – этот тип пены обычно используется в качестве упаковочного материала для телевизоров, электрических приборов, при изготовлении шлемов, внутри ящиков со льдом и для дорожного и домашнего строительства.
 EPS содержит около 95-98% воздуха.
EPS содержит около 95-98% воздуха.Balsa Wood (Бальса, бальза, бальзовое дерево, охрома) – в прошлом большинство RC самолётов использовали бальcу в качестве основного материала. Является невероятно лёгкой, но при этом показательно жесткой и легко обрабатываемой древесиной, оптимально подходящей для создания рам, крыльев и хвостового оперения. Невероятная осторожность и время должны быть вложены во время строительства, и даже самые лёгкие удары могут нанести серьезный ущерб раме (более серьёзные краши приводят к полному разрушению).
Выдувной пластик – процесс выдувного формования пластика включает закрытую матрицу, в которую выдувается полурасплавленный пластик, а затем охлаждается, чтобы сохранить её форму. На выходе получается прочная полая оболочка. Выдувной пластик чаще всего используется для создания фюзеляжа (в отличие от крыльев), после изготовления пользователь должен сделать соответствующие вырезы.
 Выдувные конструкции/комплект деталей также могут включать в себя предварительно вырезанную бальсу в качестве усиления. Выдувной пластик может противостоять ударам небольшой силы и имеет тенденцию вдавливаться, а не разрушаться.
Выдувные конструкции/комплект деталей также могут включать в себя предварительно вырезанную бальсу в качестве усиления. Выдувной пластик может противостоять ударам небольшой силы и имеет тенденцию вдавливаться, а не разрушаться.Вакуумный пластик (Vacuumed Plastic) – процесс вакуум-формования листов включает нагревание тонкого пластикового листа до такой степени, что он становится гибким, но не совсем расплавленным, и размещение его на охватываемой матрице; пока он остаётся гибким, воздух между матрицей и листом удаляется (то есть выкачивается), что заставляет лист принять её форму. Пластик остывает, и трехмерная форма вырезается из окружающего материала. Существует много различных типов пластмасс, которые могут быть сформированы в вакууме, и их свойства могут варьироваться. Поликарбонат является хорошим компромиссом между весом и ударопрочностью.
Гофрированный пластик (Corrugated Plastic) – несмотря на то, что немногие самолёты используют его для фюзеляжа или крыльев, зачастую материал используется для придания жёсткости дверям или там, где требуются плоские поверхности.
 Гофрированный пластик выглядит как гофрокартон, только исполнен из пластика. Он очень устойчив к авариям и ударам, с ним легко работать без каких-либо специальных инструментов и он очень гладкий (аэродинамика).
Гофрированный пластик выглядит как гофрокартон, только исполнен из пластика. Он очень устойчив к авариям и ударам, с ним легко работать без каких-либо специальных инструментов и он очень гладкий (аэродинамика).Какой материал лучше?
Так какой материал выбрать для самолёта? Подавляющее большинство FPV сообщества использует пену EPO так как:
- По сравнению с бальзой экспоненциально меньше времени затрачивается на сборку, и следовательно, быстрее поднимается в воздух.
- Относительно лёгкий по сравнению с другими материалами и прилично жесткий*, и при этом может быть легко модифицирован/разрезан.
- «Всепрощающий», в том смысле, что он способен противостоять авариям и ударам малой силы, а также может многократно переклеиваться; и снова в полёт.
- Хорошее качество; Модели из пены имеют довольно высокую цену, поскольку разработчику необходимо компенсировать стоимость конструкции, прототипов и пресс-формы, а стоимость рамы обычно пропорциональна её размеру.
- Не требует применения специальных инструментов, таких как ламинирующий утюг с подогревом.
- Большинство комплектных рам включают в себя основные необходимые компоненты (для моделей из бальзы часто требуется дополнительная покупка ламинирующей плёнки, большая часть аппаратного обеспечения и многое другое).
* Модели из пены редко бывают достаточно жесткими сами по себе, и чтобы выдерживать нагрузки действующие на крылья в полёте, последние требуют дополнительного усиления в виде «лонжеронов» (длинные и тонкие стержни, как правило, изготовленные из стекловолокна или углеродного волокна) для увеличения жёсткости. Эти лонжероны зачатую необходимо приклеивать в различных стратегических местах, как сверху, так и снизу крыла (клеятся в предварительно прорезанные каналы). Размер моделей из пены, как правило, ограничивает только практичность, именно по этому довольно редко приходится видеть модели с размахом крыла более 2м.

Сборка
- Пена: Важно отметить, что далеко не каждый клей можно использовать для склеивания пены, так как некоторые из существующих могут разъедать и разрушать материал.
- Бальса: Цианакрилатовый клей чаще всего используют для соединения бальзовой древесины — как правило вязкая жидкость (почти как вода), обеспечивает очень прочную связь между склеиваемыми поверхностями. Как только каркас будет готов, его необходимо покрыть ламинатом (пластиковый лист с клеем, активируемым теплом с одной стороны), чтобы создать аэродинамическую поверхность. Ламинирующая плёнка нагревается/наносится с помощью ламинирующего утюга, обеспечивая на выходе плотную/твёрдую поверхность. Ламинат годится только для приклеивания к бальзовой древесине — его нельзя использовать для создания трехмерных фигур.
- Композиты: до сих пор редко можно увидеть композитные материалы, используемые для создания самолётов небольшого размера (углеродное волокно). В основе этих деталей эпоксидная смола (или специальный связующий агент), и их сложнее резать вручную, чаще требуется фрезерный станок с ЧПУ.
 Наиболее распространенными клеями, используемыми для склеивания пены EPO, являются «Goop» (название бренда) и «Gorilla Glue» (название бренда). Goop — прозрачный и имеет густую консистенцию, а также отличную связь. Gorilla Glue — для активации требует немного воды, исходная консистенция — густая. После взаимодействия с водой пенится примерно до 400% от своего первоначального размера и имеет жёлтый цвет. Клей «Gorilla» можно срезать в тех местах, где он нежелателен, но при этом необходимо исключить протекание клея в участки, в которых он быть не должен (например при помощи малярного скотча), и после нанесения, скрепляемые детали должны быть неподвижны, пока клей расширяется и затвердевает. Срезают пену обычно с помощью острого ножа, паяльного пистолета (в отличие от паяльника) или нагретой проволоки. Ручная пила имеет тенденцию разрывать пену и оставлять очень шероховатую поверхность. Самолёты из пены чаще бывают белого цвета, редко чёрного, а еще реже серого или других цветов. Кастомизация внешнего вида заключается в добавлении цвета или рисунков, которые можно выполнить с использованием специальной краски, ламината или винила.
Наиболее распространенными клеями, используемыми для склеивания пены EPO, являются «Goop» (название бренда) и «Gorilla Glue» (название бренда). Goop — прозрачный и имеет густую консистенцию, а также отличную связь. Gorilla Glue — для активации требует немного воды, исходная консистенция — густая. После взаимодействия с водой пенится примерно до 400% от своего первоначального размера и имеет жёлтый цвет. Клей «Gorilla» можно срезать в тех местах, где он нежелателен, но при этом необходимо исключить протекание клея в участки, в которых он быть не должен (например при помощи малярного скотча), и после нанесения, скрепляемые детали должны быть неподвижны, пока клей расширяется и затвердевает. Срезают пену обычно с помощью острого ножа, паяльного пистолета (в отличие от паяльника) или нагретой проволоки. Ручная пила имеет тенденцию разрывать пену и оставлять очень шероховатую поверхность. Самолёты из пены чаще бывают белого цвета, редко чёрного, а еще реже серого или других цветов. Кастомизация внешнего вида заключается в добавлении цвета или рисунков, которые можно выполнить с использованием специальной краски, ламината или винила. Примите во внимание, что для окрашивания пены подходят не все краски, некоторые могут её разрушать.
Примите во внимание, что для окрашивания пены подходят не все краски, некоторые могут её разрушать. Создание 3D-фигур также является довольно сложным процессом. Обычно самолёты используют композиты для усиления.
Создание 3D-фигур также является довольно сложным процессом. Обычно самолёты используют композиты для усиления.Мощность
- Самолётная силовая установка состоит из мотора, воздушного винта (пропеллера), ESC и аккумулятора. Выбор подходящих частей для рамы не должен быть «догадкой», и лучше всего посмотреть, есть ли у производителя рамы какие либо рекомендации касательно мотора, винта, либо диапазон для данной полезной грузоподъёмности.
- В наши дни большинство энтузиастов склоняются к электромоторам, а не к топливу (например, керосину) из-за самой низкой стоимости эксплуатации и простоты использования. Солнечная энергия используется редко, поскольку мощность, которую обеспечивает солнечная энергия, в сравнении с добавленным весом солнечных панелей (которые используются для зарядки батарей), все еще не выгодна.
- Выберите комбинацию мотор/пропеллер, способную обеспечить необходимую тягу для вашего планера, который имеет конкретную нагрузку.
- Недостаточное питание самолёта может привести к его нестабильности или крушению. Перегруженный самолёт может быть совершенно нестабильным в полёте. Учитывая, что почти все технологии, используемые для создания беспилотных летательных аппаратов, происходят из индустрии радиоуправления, имеется достаточно информации о выборе правильной тяги и сервоприводов для различных применений.
- Центр масс: Центр масс — это точка, вокруг которой можно разместить раму, чтобы вес был одинаковым со всех сторон. Центр подъёмной силы/коэффициент момента. Это точка, где суммируется вся подъёмная сила, создаваемая крыльями и управляющими поверхностями, обычно находится в самой высокой точке аэродинамического профиля. Желательно чтобы центр масс, соответствовал центру подъёмной силы.
 Некоторые производители планеров предлагают ряд идей касательно требуемой тяги на основе собственных экспериментов, которые должны дать общее представление о необходимом диапазоне.
Некоторые производители планеров предлагают ряд идей касательно требуемой тяги на основе собственных экспериментов, которые должны дать общее представление о необходимом диапазоне.Запуск/Посадка
- Запуск/посадка на взлетно-посадочной полосе: чтобы воспользоваться взлётно-посадочной полосой, дрону нужны колёса, а взлётно-посадочная полоса должна быть максимально ровной и идеально вымощенной.
- Ручной запуск: Существует два основных способа ручных запусков: с размахом под рукой или над головой. Способ с размахом аналогичен запуску диска (или киданию камней по воде), когда оператор пытается разогнать дрон до максимальной скорости, используя угловую скорость. В качестве альтернативы есть способ над головой, когда оператор запускает самолёт вверх (лучше всего, чтобы это делал второй оператор/помощник).
- Запуск посредством катапульты: чтобы максимально быстро разогнать дрон, катапульта использует один из нескольких различных способов: сплетённый резиновый трос (bungee cable/банди), лебедка или даже сжатый воздух. Катапульты нелегко транспортировать и они требуют дополнительных инвестиций и диагностики.
- Ручной захват: поймать небольшой дрон рукой не сложно, при условии, что пропеллер не вращается, но, так или иначе способ требует некоторой сноровки.
- Приземление: Наиболее часто используемый метод посадки — это посадка с помощью заноса на прилично ровной поверхности, такой как трава.
- Сетевой «захват»: Несмотря на то, что чаще всего такой способ посадки используется военными для небольших беспилотников, использование сетки для ловли беспилотника весьма эффективно там, где другие способы посадки затрудненны. При этом настройка сетевой системы требует времени, и для большинства энтузиастов предпочтительнее использовать другие типы посадки.

 Этот метод актуален потому что все меньше и меньше дронов имеют шасси (а взлётно-посадочная полоса недоступна), принуждая самолёт просто приземлиться на любой возможной плоскости. Обычно перед полётом, пилот находит подходящее место для посадки. В идеале самолёт должен иметь сменные защитные пластины из-за постепенного износа.
Этот метод актуален потому что все меньше и меньше дронов имеют шасси (а взлётно-посадочная полоса недоступна), принуждая самолёт просто приземлиться на любой возможной плоскости. Обычно перед полётом, пилот находит подходящее место для посадки. В идеале самолёт должен иметь сменные защитные пластины из-за постепенного износа.камер FPV для дронов | Ключевые факторы и рекомендации
FPV означает просмотр от первого лица. Зачем нам камера? Правильный вопрос!!! Камера FPV должна обеспечивать пилоту прямую аналоговую видеотрансляцию, чтобы пилот мог маневрировать своим дроном. Видеопоток с этой камеры FPV поможет пилоту летать. HD-камеры — еще одна разновидность камер, используемых на коптерах. Теперь следующий вопрос, который приходит вам на ум, почему существует 2 разных типа камер?
Видеопоток с этой камеры FPV поможет пилоту летать. HD-камеры — еще одна разновидность камер, используемых на коптерах. Теперь следующий вопрос, который приходит вам на ум, почему существует 2 разных типа камер?
Подробнее…
Камеры FPV и HD — это два типа камер, которые служат двум разным целям.
Камеры FPV обеспечивают передачу видео с очень малой задержкой и исключительным качеством изображения.
HD-камеры записывают сверхчеткие видеоролики, на которые приятно смотреть.
Задержка HD-камеры слишком велика для передачи (примерно 150 мс) и, следовательно, не может использоваться для прямой передачи видео, тогда как FPV-камеры не могут записывать HD-видео (или могут!! Подробнее об этом ниже).
Быстрая навигация
Датчик визуализации- CCD или CMOS
Формульный фактор
Отношение сторон
Латентность
Входное напряжение
Поле вида
Видео-кодирование формата NTSC или PAL
Resolution
Широкий динамический RAGIC-RANGIN )
Работа при слабом освещении
Экранное меню (OSD)
HD-камеры для FPV
Настройки камеры
Традиционно пилоты FPV использовали относительно дорогие, большие и громоздкие HD-камеры, такие как Runcam 3 или GoPro Hero 7. Но Ушли в прошлое каменный век, когда крошечные миниатюрные FPV-камеры, такие как Runcam Split 2, с печатной платой 36×36, записывающей видео 1080p, стоили 1/4 стоимости GoPro и в 5 раз легче по весу.
Но Ушли в прошлое каменный век, когда крошечные миниатюрные FPV-камеры, такие как Runcam Split 2, с печатной платой 36×36, записывающей видео 1080p, стоили 1/4 стоимости GoPro и в 5 раз легче по весу.
Камеры FPV бывают всех форм и размеров. Чтобы упростить процесс покупки, ниже перечислены некоторые факторы, которые помогут человеку оценить FPV-камеру и выбрать подходящую.
Лучшая FPV-камера для дрона
Лучшие FPV-камеры со временем стали лучше: задержки значительно сократились, а качество изображения значительно улучшилось. Камеры FPV бывают разных размеров для различных применений квадроциклов, используемых сегодня.
Существуют преимущественно 3 основных размера камер FPV: стандартные или полноразмерные, микроразмерные и наноразмерные камеры.
Камеры стандартного размера в основном поэтапные из-за их громоздкости и были заменены камерами микроразмера, но стандартные камеры все еще используются сегодня из-за их надежности и прочности.
988
458
40088
Камера FPV стандартного размера | Камера FPV микроразмера | Nano-sized FPV Camera | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
FPV Camera | Runcam Swift 2 | Caddx Ratel | Runcam Nano 2 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
размеры | 28,8 x 26 x 26 мм | 19 x 19 x 19 мм | 14 x 14 x 16 м. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Weight | 14g | 8g | 3.2g | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Camera Sensor | CCD | CMOS | CMOS | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Соотношение сторон | Фиксированный 4:3 | Изменяемый 16:9, 4:3 9008 9008 Фиксированный0003 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Signal type | PAL | Changeable 16:9, 4:3 | Fixed 4:3 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Input voltage | 5 — 36 В | 5 — 40 В | 3 — 5,5 В | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
. 0052 0052Runcam Swift 2Стандартная камера Стандартный FPV Camera Runcam Swift 2 Первый запуск в 2017 году. . Причина успеха Swift 2 — датчик камеры CCD, который он предлагал, и функции, которые он с ним интегрировал. $ Проверить цену на GetFPV Да, КМОП-камеры лучше, чем ПЗС-камеры, имеют меньшую задержку и намного меньшее энергопотребление, но качество изображения, обеспечиваемое ПЗС-матрицей, намного лучше, чем у КМОП-камер. По мере того, как индустрия FPV двигалась к более быстрой и малой задержке, дни ПЗС-сенсоров изображения были сочтены. Swift 2 относится к категории камер стандартного размера, это самый большой размер камеры, используемый для FPV. Вес Swift 2 исходит от металлического корпуса, который закрывает материнскую плату и датчик камеры. Best Micro FPV CameraCaddx RatelMicro FPV Camera Micro-sized FPV camera Caddx Ratel 2 Caddx is a relatively new player in the FPV camera market которая в последнее время выпускает невероятно хорошие FPV-камеры, Ratel — одна из них. $ Проверить цену на Amazon Ratel — FPV-камера микроразмера, представляет собой камеру стандартного размера, которая немного похудела, заменив большой металлический корпус на меньший. Камеры микроразмера не уступают своим полноразмерным аналогам с характеристиками, равными или превосходящими возможности камер стандартного размера. Огромная популярность Caddx Ratel отчасти объясняется исключительным качеством изображения, которое он предлагает. Ratel может похвастаться большим сенсором 1/1,8 дюйма с разрешением 1200 ТВЛ. Датчик изображения — это то, что Caddx называет датчиком звездного света, освещения луны и звезд в ночном небе достаточно для полета. Ratel также поставляется с изменяемым пользователем соотношением сторон 4:3 и 16:9.соотношение сторон и выход камеры могут переключаться между PAL и NTSC пользователем. Эта функция, переключаемая пользователем, является удобным выбором для тех, кто не хочет зацикливаться на формате 4:3 или выходе сигнала PAL. Лучшая нано-камера FPVRuncam Nano 2Нано-камера FPV Нано-камера FPV RunCam Nano 4 Runcam работает в индустрии FPV с тех пор, как существует FPV. Кто еще может сделать FPV-камеры лучше? $ Проверить цену на Amazon Runcam Nano 4 — это камера наноразмера, которая в основном используется в сборках размером 3 дюйма и меньше. В Nano 4 используются те же 1/3-дюймовые CMOS-сенсоры, что и в других более крупных аналогах Runcam, с разрешением 800 ТВЛ. Камера поставляется со сверхшироким углом и фиксированным видеовыходом, который можно выбрать между PAL или NTSC при покупке. Best AIO FPV CameraMicro AIO FPV CameraAll in One All in one FPV camera AKK BA3 AIO cameras are a compact breed of FPV cameras that come with камера и видеопередатчик, но в корпусе меньшего размера, чем типичный видеопередатчик. $ Проверить цену на Amazon Камеры AIO представляют собой компактную породу камер FPV, которые поставляются с камерой и видеопередатчиком, но в упаковке меньшего размера, чем типичный видеопередатчик. При цене около 20 долларов за камеру, видеопередатчик и антенну AKK по-прежнему дешевле, чем Caddx Ratel. Камера AIO имеет общий вес 4,2 г, 4,2 г для камеры, видеопередатчика и передатчика. Камера имеет угол обзора 120°, а Getfpv предоставляет крепление для камеры, которое можно распечатать на 3D-принтере. Видеопередатчик представляет собой 48-канальный видеопередатчик, способный передавать мощность 0 мВт, 25 мВт и 200 мВт, который может питаться от напряжения в пределах 2,9 В.-5,5В. Передатчик, что удивительно для его небольшого размера, поддерживает интеллектуальное аудио, через которое он подключается к Betaflight. Ближайшим вторым является Wolwhoop Micro AIO с аналогичными характеристиками. Факторы, которые следует учитывать при выборе FPV-камерыДатчик изображения — ПЗС или КМОП ПЗС (устройство с зарядовой связью) и КМОП (дополнительные датчики изображения) — оксидно-полупроводниковые датчики2 используются в камерах FPV, где они в основном различаются в зависимости от того, как изображение захватывается датчиком, размещенным в камере FPV. Датчик изображения Оба датчика изображения CCD и CMOS начинают с захвата изображения и преобразования изображения в цифровые сигналы. Следующим шагом является считывание значения (электроны или заряд, накопленный камерой). На этом сходство между ними заканчивается. Основное различие заключается в том, как электрический сигнал обрабатывается и выводится. В ПЗС-датчике изображения электрический сигнал передается через чип и считывается в одном из углов матрицы. Электрический заряд от строки пикселей переносится на следующую до тех пор, пока все строки пикселей не завершат вывод. В отличие от ПЗС, датчики CMOS считывают электрические сигналы с каждого отдельного пикселя (пиксель — это крошечная точка или квадрат, являющийся частью цифрового изображения). Датчики CMOS имеют отдельные транзисторы для отдельных пикселей по сравнению с несколькими транзисторами в датчике CCD. Еще одним существенным недостатком КМОП-сенсоров является то, как они захватывают изображение. Датчики CCD используют глобальный затвор (захват изображения происходит мгновенно), а датчики CMOS используют скользящий затвор (скользящий затвор — захват изображения построчно). Поскольку датчик CMOS выводит изображение построчно, любые вибрации могут привести к искажению изображения. Это искажение известно как эффект JELLO. Если вы ничего не поняли из вышеизложенного, знайте следующее: ПЗС-датчик изображения создает изображения высокого качества и менее чувствителен к электрическим помехам. CMOS, как правило, имеют более низкую светочувствительность и потребляют значительно меньше энергии, чем датчик изображения CCD. CMOS также имеют более низкое качество изображения, но с постоянными улучшениями датчики CMOS пытаются догнать датчики CCD. Форм-фактор Существует 4 основных размера камер: стандартный, мини, микро и наноразмер. Эти камеры классифицируются по монтажным отверстиям, с помощью которых камера крепится к раме. Стандартный размер был выбран Runcam Swift, когда он был запущен в 2017 году с монтажными отверстиями на расстоянии 28 мм друг от друга. Они подходят ко всем рамам большего размера, а также к некоторым рамам среднего размера. Они также используются в самолетах RC FPV. Мини-камеры имеют монтажные отверстия диаметром 21 мм, которые обычно подходят для рам среднего размера. Камеры мини-размера стали популярны в наши дни, поскольку они превращаются в камеры FPV/HD. Камеры микроразмера используются со сверхлегкими рамами гоночных дронов, где важно экономить каждый грамм веса. Но не обманывайтесь размером, поскольку он может работать так же, как камера стандартного размера. Крепежные отверстия 19мм друг от друга. Камеры Nano не имеют специальных вариантов крепления. Обычно они не поставляются в жестких футлярах, как камеры стандартного размера. Они в основном используются на квадроциклах размером до 2 дюймов. Соотношение сторонСоотношение сторон относится к размеру изображения, отображаемого на мониторе или экране. Формат изображения 16×9 будет иметь более широкое и короткое изображение, чем формат 4×3. Формат изображения 4×3 может показаться выше. Есть пилоты FPV, которые предпочитают как 16×9и 4х3. Но широко признано, что формат изображения 4×3 помогает летать лучше из-за более высокого изображения. Но соотношение сторон также может зависеть от камеры и объектива камеры. Некоторые камеры FPV поддерживают формат изображения 16×9 и 4×3. Большинство CMOS-камер изначально поддерживают формат 16×9, для CMOS-камеры для отображения формата изображения 4×3 стороны могут казаться обрезанными от 16×9 для формирования изображения 4×3. Задержка Камерам FPV требуется время для захвата и обработки изображения. Задержка может быть связана не только с самой камерой. Видеопередатчики и ЖК-экраны в очках FPV также могут увеличить задержку. Если вы летите медленно и ближе к вам, задержка не представляет серьезной проблемы для покупателя. Но при полете на гоночном квадроцикле со скоростью 100 миль в час с задержкой в 100 мс от FPV-камеры дрон находится на 4 м впереди, и у вас нет времени среагировать и исправить свои действия. Это теория, большинство современных камер FPV имеют время задержки всего 10 мс. Благодаря постоянным улучшениям камеры, такие как Foxeer Predator V3, имеют задержку всего 4 мс. Входное напряжение Входное напряжение относится к диапазону напряжений, которые можно безопасно подавать для безопасной работы камеры. Хорошо сконструированная камера FPV будет поддерживать широкий диапазон напряжений, при этом большинство современных камер поддерживают напряжение до 35 В. Входное напряжение относится к диапазону напряжений, которые можно безопасно подавать для безопасной работы камеры. Хорошо сконструированная камера FPV будет поддерживать широкий диапазон напряжений, при этом большинство современных камер поддерживают напряжение до 35 В. Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В). Не рекомендуется подавать на камеру большое напряжение, так как внутреннее рабочее напряжение ниже. Чем выше входное напряжение, тем сильнее BEC работает, чтобы понизить это напряжение. Подача более низкого напряжения также делает камеру более прохладной. Поэтому рекомендуется подавать более низкое входное напряжение. Большинство современных ПК имеют фильтрованные источники питания, предназначенные для FPV-камеры, поэтому стоит присмотреться к ПК, который вы собираетесь использовать. Поле зренияПоле зрения (FOV) относится к наблюдаемой области, захваченной камерой. Размер объектива камеры определяет FOV. Чем меньше объектив камеры, тем больше FOV. 2
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 0003
0003 Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
Сам датчик камеры — это то, что Runcam называет ПЗС-датчиком Super HAD II с разрешением 600 ТВЛ. Сигнал камеры выводится в формате PAL и с соотношением сторон 4:3. Swift 2 также поставляется с 3 вариантами объектива: 2,5 мм при 130 ° FOV, 2,3 мм при 150 ° FOV и 2,1 мм при 165 ° FOV, и может питаться от батареи 6S Lipo. Камера также когда-то имела революционные функции, которые сейчас в основном избыточны, встроенное экранное меню, которое может отображать напряжение батареи, встроенный микрофон, который выводит звук, и черно-белый режим для полетов при слабом освещении. Функция экранного меню сделала его удобной покупкой для пилотов с неподвижным крылом, чтобы следить за напряжением батареи.
 Ratel можно выбрать с объективом 1,66 мм или 2,1 мм, кроме того, объектив 2,1 мм также поставляется с фильтром нейтральной плотности.
Ratel можно выбрать с объективом 1,66 мм или 2,1 мм, кроме того, объектив 2,1 мм также поставляется с фильтром нейтральной плотности. Nano 4 поставляется с объективом 2,1 мм при 155 ° FOV и 1,8 мм при 170 ° FOV. Nano 4 теряет вес (2,9g) путем выбора корпуса датчика камеры из АБС-пластика, и ему пришлось отказаться от возможности работать в больших диапазонах напряжения. Разъемы припаяны, что избавляет вас от хлопот, связанных с пайкой этих маленьких контактных площадок. Но по цене и качеству изображения Runcam Nano 4 является лучшим в этой категории. Еще одним достойным упоминания является устройство Runcam Phoenix 2 Nano с переключаемыми пользователем соотношениями сторон и видеовыходами, которое может потреблять напряжение до 36 В при очень низком энергопотреблении.
Nano 4 поставляется с объективом 2,1 мм при 155 ° FOV и 1,8 мм при 170 ° FOV. Nano 4 теряет вес (2,9g) путем выбора корпуса датчика камеры из АБС-пластика, и ему пришлось отказаться от возможности работать в больших диапазонах напряжения. Разъемы припаяны, что избавляет вас от хлопот, связанных с пайкой этих маленьких контактных площадок. Но по цене и качеству изображения Runcam Nano 4 является лучшим в этой категории. Еще одним достойным упоминания является устройство Runcam Phoenix 2 Nano с переключаемыми пользователем соотношениями сторон и видеовыходами, которое может потреблять напряжение до 36 В при очень низком энергопотреблении.
 Камеры FPV преобразуют световые сигналы в электрические сигналы, чтобы их можно было передавать с помощью аналоговых видеопередатчиков.
Камеры FPV преобразуют световые сигналы в электрические сигналы, чтобы их можно было передавать с помощью аналоговых видеопередатчиков.
 Каждый кадр дрона отличается и поддерживает определенные размеры камеры. Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать.
Каждый кадр дрона отличается и поддерживает определенные размеры камеры. Следовательно, важно принять во внимание размер камеры перед покупкой камеры и иметь несовместимую камеру, которая слишком велика или слишком мала для использования в кадре, который вы собираетесь использовать.
 Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше.
Это время, необходимое камере для преобразования изображения в электрические сигналы, называется задержкой. Чем меньше задержка, тем лучше. Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В).
Камеры имеют встроенный линейный BEC, который снижает напряжение до 3,3 В (внутреннее рабочее напряжение электроники внутри камеры составляет 3,3 В). Напряжение в пределах 12В считается номинальным.
Напряжение в пределах 12В считается номинальным. . С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения.
. С большим полем зрения становится трудно наблюдать мельчайшие детали, такие как ветки деревьев. С нашими ограниченными vTx все становится намного хуже. Поле зрения между 130-150° считается идеальным для значительного обзора и исключительной детализации. На приведенной ниже диаграмме показана камера с узким и широким полем зрения. Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает.
Но это зависит от ваших личных предпочтений. Выберите формат видео, который вам подходит. Поскольку большинство камер FPV поддерживают оба формата, будет проще переключиться туда-сюда и выбрать тот, который работает. 43 MP
43 MP
 Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом.
Экранное меню на камере может предоставить нам только основную информацию, такую как приблизительное напряжение батареи. Если вы летите на квадроциклах, этот фактор не так важен, потому что контроллеры полета дрона имеют специальные чипы OSD, чтобы позаботиться об этом. Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота.
Этот HD-видеопоток можно использовать для аэрофотосъемки, инспекций или загружать видео на Youtube и демонстрировать навыки пилота. Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования.
Каждая FPV-камера уникальна, поэтому рекомендуется просматривать веб-страницы и проверять, стоит ли вносить изменения в настройки, которые могут работать или не работать для вашего конкретного использования. Без него вы просто не смогли бы подняться в небо. К сожалению, это не так просто, как один идеальный кадр, чтобы управлять ими всеми. Есть много соображений, которые вам нужно учитывать, исходя из того, что вы хотите, чтобы ваш дрон делал.
Без него вы просто не смогли бы подняться в небо. К сожалению, это не так просто, как один идеальный кадр, чтобы управлять ими всеми. Есть много соображений, которые вам нужно учитывать, исходя из того, что вы хотите, чтобы ваш дрон делал.
 Это означает, что мои квадроциклы тяжелые по сравнению с большинством гоночных рам, но мне не нужна такая максимальная скорость. У меня есть несколько гоночных рам, но больше всего мне нравятся 5-дюймовые рамы для фристайла.
Это означает, что мои квадроциклы тяжелые по сравнению с большинством гоночных рам, но мне не нужна такая максимальная скорость. У меня есть несколько гоночных рам, но больше всего мне нравятся 5-дюймовые рамы для фристайла.


 В свою очередь, это позволяет местной дистрибьюторской сети иметь дешевый и прямой доступ к хорошей раме, что позволяет им конкурировать на все более хищническом рынке». Эти утверждения по большей части верны, рамы Source One были первыми, в которых были реализованы первые в отрасли изменения и огромное количество обновлений, доступных в Интернете. Основная причина низкой цены такой хорошо сложенной рамы заключается в том, что это голая кость. Потребители получают только рамку и больше ничего. Нет крепления антенны и камеры. Но они довольно дешевы, и есть много доступных деталей, напечатанных на 3D-принтере.
В свою очередь, это позволяет местной дистрибьюторской сети иметь дешевый и прямой доступ к хорошей раме, что позволяет им конкурировать на все более хищническом рынке». Эти утверждения по большей части верны, рамы Source One были первыми, в которых были реализованы первые в отрасли изменения и огромное количество обновлений, доступных в Интернете. Основная причина низкой цены такой хорошо сложенной рамы заключается в том, что это голая кость. Потребители получают только рамку и больше ничего. Нет крепления антенны и камеры. Но они довольно дешевы, и есть много доступных деталей, напечатанных на 3D-принтере.
 для компоновки true-X Pyrodrone создала Hyperlite F3LX.
для компоновки true-X Pyrodrone создала Hyperlite F3LX. R5 похож на раму Hyperlite F3LX от iFlight, которая может вместить намного больше электроники.
R5 похож на раму Hyperlite F3LX от iFlight, которая может вместить намного больше электроники.


 Это диктует размер реквизита, который вы можете использовать на любом конкретном квадроцикле. Как ни странно, мы измеряем раму в миллиметрах, а опоры в дюймах. Тем не менее, квадроциклы обычно называют размером их опоры. Например. 5 дюймов или 6 дюймов.
Это диктует размер реквизита, который вы можете использовать на любом конкретном квадроцикле. Как ни странно, мы измеряем раму в миллиметрах, а опоры в дюймах. Тем не менее, квадроциклы обычно называют размером их опоры. Например. 5 дюймов или 6 дюймов. Это используется как во фристайле, так и в гонках, поскольку часто является лучшим компромиссом между мощностью, весом и отзывчивостью.
Это используется как во фристайле, так и в гонках, поскольку часто является лучшим компромиссом между мощностью, весом и отзывчивостью. Таким образом, вы не найдете много людей, которые летают на 4-дюймовых коптерах.
Таким образом, вы не найдете много людей, которые летают на 4-дюймовых коптерах.

 Цель состоит в том, чтобы улучшить управляемость на высокой скорости. Однако из-за неравномерного распределения силы по центру масс часто возникает необходимость в дополнительной настройке этих рам, чтобы заставить их летать так, как нужно.
Цель состоит в том, чтобы улучшить управляемость на высокой скорости. Однако из-за неравномерного распределения силы по центру масс часто возникает необходимость в дополнительной настройке этих рам, чтобы заставить их летать так, как нужно.
 Но будет справедливо сказать, что вы хотите, чтобы самый толстый углерод на вашей раме был там, где ваша рама подвергается наибольшему риску. Однако чем толще карбон, тем тяжелее рама.
Но будет справедливо сказать, что вы хотите, чтобы самый толстый углерод на вашей раме был там, где ваша рама подвергается наибольшему риску. Однако чем толще карбон, тем тяжелее рама. Другие более премиальные рамы имеют очень хорошо вырезанный карбон там, где он на самом деле не нужен. Дешевые оправы довольно часто нуждаются в некоторой доводке, так как имеют очень острые необработанные края.
Другие более премиальные рамы имеют очень хорошо вырезанный карбон там, где он на самом деле не нужен. Дешевые оправы довольно часто нуждаются в некоторой доводке, так как имеют очень острые необработанные края. Нет жесткого и быстрого правила. При этом рамы для фристайла обычно прочнее и имеют больше места для крепления gopro, тогда как гоночные рамы легче.
Нет жесткого и быстрого правила. При этом рамы для фристайла обычно прочнее и имеют больше места для крепления gopro, тогда как гоночные рамы легче. Это защищает аккумулятор в большинстве аварий. Тем не менее, это не оптимально для производительности из-за того, что вес уравновешивается над центральной массой корабля. Это означает, что они подвешены под рамой, поэтому вес подвешен под рамой, что хорошо для прохождения поворотов, поскольку это положительно влияет на управляемость, поскольку вам не нужно так сильно балансировать вес. Тем не менее, аккумулятор представляет большую опасность при аварийных посадках.
Это защищает аккумулятор в большинстве аварий. Тем не менее, это не оптимально для производительности из-за того, что вес уравновешивается над центральной массой корабля. Это означает, что они подвешены под рамой, поэтому вес подвешен под рамой, что хорошо для прохождения поворотов, поскольку это положительно влияет на управляемость, поскольку вам не нужно так сильно балансировать вес. Тем не менее, аккумулятор представляет большую опасность при аварийных посадках. Обычно некоторые реквизиты находятся в поле зрения, особенно на растянутых x кадрах, но вы не хотите, чтобы они блокировали большую часть вашего обзора.
Обычно некоторые реквизиты находятся в поле зрения, особенно на растянутых x кадрах, но вы не хотите, чтобы они блокировали большую часть вашего обзора.
 Это делается для защиты двигателей, чтобы рама сначала принимала удар. В некоторых случаях люди используют 3D-печатные бамперы, чтобы помочь, однако это увеличивает вес.
Это делается для защиты двигателей, чтобы рама сначала принимала удар. В некоторых случаях люди используют 3D-печатные бамперы, чтобы помочь, однако это увеличивает вес.

 Видео транслируется в прямом эфире с камеры на борту корабля на видеоприемник на земле.
Видео транслируется в прямом эфире с камеры на борту корабля на видеоприемник на земле. В соревнованиях по фристайлу вы можете совмещать полеты как с LOS, так и с FPV. Вы демонстрируете свое техническое и артистическое мастерство, добавляя уникальности вашему полету.
В соревнованиях по фристайлу вы можете совмещать полеты как с LOS, так и с FPV. Вы демонстрируете свое техническое и артистическое мастерство, добавляя уникальности вашему полету. Есть тонны видео, которые помогут вам собрать квадроцикл . Даже если у вас нет опыта пайки и тому подобного, , освоив эти навыки для сборки четырехъядерного , определенно поможет вам в долгосрочной перспективе.
Есть тонны видео, которые помогут вам собрать квадроцикл . Даже если у вас нет опыта пайки и тому подобного, , освоив эти навыки для сборки четырехъядерного , определенно поможет вам в долгосрочной перспективе. Большинство полетных контроллеров поддерживают основные протоколы, такие как PPM, IBUS, SBUS, DSM и Crossfire.
Большинство полетных контроллеров поддерживают основные протоколы, такие как PPM, IBUS, SBUS, DSM и Crossfire.
 Tyro99 поставляется в виде комплекта со всеми деталями, за исключением приемника, и вам нужно собрать его вместе, и коптер, который безумно недооценен 5-дюймовым коптером за 99 долларов
Tyro99 поставляется в виде комплекта со всеми деталями, за исключением приемника, и вам нужно собрать его вместе, и коптер, который безумно недооценен 5-дюймовым коптером за 99 долларов Да, вы можете поверить в это 10 пар для квадроцикла, который стоит 99 долларов. Вы также получаете пару ремешков для аккумуляторов, несколько стяжек и пару липких прокладок для аккумуляторов.
Да, вы можете поверить в это 10 пар для квадроцикла, который стоит 99 долларов. Вы также получаете пару ремешков для аккумуляторов, несколько стяжек и пару липких прокладок для аккумуляторов.
 Таким образом, вы будете знакомы с электроникой, будете более подготовлены к диагностике проблем и почините что-то, когда оно сломается. Повреждение вашего квадроцикла неизбежно, мы летим быстро и сильно разбиваемся.
Таким образом, вы будете знакомы с электроникой, будете более подготовлены к диагностике проблем и почините что-то, когда оно сломается. Повреждение вашего квадроцикла неизбежно, мы летим быстро и сильно разбиваемся.
 Он работает за счет наличия щетки в нижней половине двигателя, что соответствует полярности, и из-за этого он питается от постоянного тока и, следовательно, может быть подключен напрямую к аккумулятору
Он работает за счет наличия щетки в нижней половине двигателя, что соответствует полярности, и из-за этого он питается от постоянного тока и, следовательно, может быть подключен напрямую к аккумулятору 0088
0088
 25 А). Ток измеряется в амперах (А), LiPo емкостью 1300 мАч (мАч = миллиампер в час) обеспечивает ток 1,3 А или 1300 мА в течение 1 часа, прежде чем он полностью разрядится.
25 А). Ток измеряется в амперах (А), LiPo емкостью 1300 мАч (мАч = миллиампер в час) обеспечивает ток 1,3 А или 1300 мА в течение 1 часа, прежде чем он полностью разрядится. FC сигнализирует ESC, который регулирует скорость импульсов тока, чтобы управлять двигателем на требуемой скорости.
FC сигнализирует ESC, который регулирует скорость импульсов тока, чтобы управлять двигателем на требуемой скорости.
 и RX (приемник).
и RX (приемник).


 (iBUS на самом деле быстрее, чем SBUS!)
(iBUS на самом деле быстрее, чем SBUS!) Он маленький, прочный и имеет большой радиус действия.
Он маленький, прочный и имеет большой радиус действия. Они отображаются в виде ряда чисел, я несколько раз упоминал GemFan Flash 5552×3 в этой статье, поэтому я буду использовать его в качестве примера. Первые две цифры представляют длину в дюймах:
Они отображаются в виде ряда чисел, я несколько раз упоминал GemFan Flash 5552×3 в этой статье, поэтому я буду использовать его в качестве примера. Первые две цифры представляют длину в дюймах: 0003
0003 Напряжение батареи обозначается номером ячейки 2s, 3s, 4s и т. д. В гонках дронов FPV в основном используются батареи 4S. 4S обозначает 4 ячейки, соединенные последовательно, каждая с номинальным напряжением 3,7 В, что в сумме составляет 14,8 В.
Напряжение батареи обозначается номером ячейки 2s, 3s, 4s и т. д. В гонках дронов FPV в основном используются батареи 4S. 4S обозначает 4 ячейки, соединенные последовательно, каждая с номинальным напряжением 3,7 В, что в сумме составляет 14,8 В.
 !
! Кроме того, заявлено, что Graphene имеет более высокую плотность энергии, медленнее наращивает внутреннее сопротивление и менее подвержен просадке напряжения, чем стандартная химия LiPo. Хотя они немного тяжелее.
Кроме того, заявлено, что Graphene имеет более высокую плотность энергии, медленнее наращивает внутреннее сопротивление и менее подвержен просадке напряжения, чем стандартная химия LiPo. Хотя они немного тяжелее.

 Камеры CCD также более устойчивы к вибрации и не так сильно страдают от Jello, как CMOS.
Камеры CCD также более устойчивы к вибрации и не так сильно страдают от Jello, как CMOS. Если ваш FPV-дисплей работает только с PAL или NTSC, но не с обоими, то все приобретаемые вами FPV-камеры должны работать с одним и тем же протоколом.
Если ваш FPV-дисплей работает только с PAL или NTSC, но не с обоими, то все приобретаемые вами FPV-камеры должны работать с одним и тем же протоколом. Они варьируются от 25-100-200-600-800 милливольт.
Они варьируются от 25-100-200-600-800 милливольт. Любое вопиющее пренебрежение правилами плохо отразится на всем хобби и может привести к жестким общим ограничениям, которые затронут всех нас.
Любое вопиющее пренебрежение правилами плохо отразится на всем хобби и может привести к жестким общим ограничениям, которые затронут всех нас. Кроме того, обратите внимание на выбор и расположение разъемов типа L и W. кусок коаксиального кабеля. Прочтите эту статью, в которой объясняется, как сделать 160 пагодных антенн всего за 40 долларов!
Кроме того, обратите внимание на выбор и расположение разъемов типа L и W. кусок коаксиального кабеля. Прочтите эту статью, в которой объясняется, как сделать 160 пагодных антенн всего за 40 долларов!

 ..
.. Если вы хотите узнать больше, мы составили подробное руководство по квадрокоптерам micro fpv.
Если вы хотите узнать больше, мы составили подробное руководство по квадрокоптерам micro fpv.
 Обязательно рекомендуем много заниматься, это поможет вам развить мышечную память при использовании палочек. Симы отлично подходят для того, чтобы вы могли практиковаться, не опасаясь разбить свой квадроцикл. Больше сбоев в симуляторе должно означать меньше сбоев и меньше повреждений вашего квадроцикла.
Обязательно рекомендуем много заниматься, это поможет вам развить мышечную память при использовании палочек. Симы отлично подходят для того, чтобы вы могли практиковаться, не опасаясь разбить свой квадроцикл. Больше сбоев в симуляторе должно означать меньше сбоев и меньше повреждений вашего квадроцикла. Однако то, насколько быстро ваш дрон чувствует себя, когда вы летите в FPV, на самом деле не столько связано с аппаратным обеспечением, которое вы используете, сколько с углом обзора камеры. Квадроцикл должен наклоняться вперед, чтобы двигаться вперед, и чем дальше вы наклоняетесь вперед, тем больше тяги вам нужно будет приложить, чтобы не потерять высоту, и тем быстрее вы будете двигаться.
Однако то, насколько быстро ваш дрон чувствует себя, когда вы летите в FPV, на самом деле не столько связано с аппаратным обеспечением, которое вы используете, сколько с углом обзора камеры. Квадроцикл должен наклоняться вперед, чтобы двигаться вперед, и чем дальше вы наклоняетесь вперед, тем больше тяги вам нужно будет приложить, чтобы не потерять высоту, и тем быстрее вы будете двигаться.