Что такое робототехника 10 класс онлайн-подготовка на Ростелеком Лицей
Тема 1: Робототехника. Что? Зачем? Почему?
- Видео
- Тренажер
- Теория
Заметили ошибку?
Добро пожаловать на курс «Робототехника». В первом модуле вы узнаете:
- как могут выглядеть роботы;
- что такое робот и как его распознать;
- какие дополнительные элементы может иметь робот;
- что может заставить робота двигаться;
- где встречаются роботы дома и в городе;
- что умеют роботы и в каких областях им уже нашлось применение.
Почему роботы такие разные и часто не похожи на людей
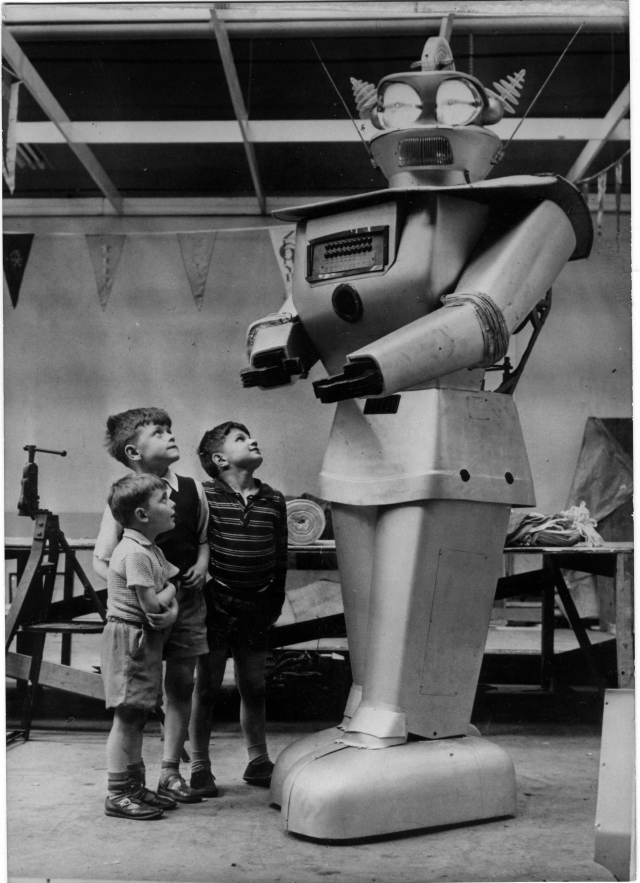
Услышав слово «роботы», вы почти наверняка представляете себе что-то хотя бы отдалённо похожее на человека или животное. Однако в жизни это не всегда так: форма, вид и размер робота определяются задачей, которую он решает.
Все объекты на картинках в тесте — роботы, каждый из них автоматизирует какую-то работу, выполняя заранее заданную функцию.
- Антропоморфный робот заменяет человека на опасной работе
- Кодовый замок «охраняет» вход в здание
- Стиральная машина берёт на себя стирку, полоскание и отжим
- Дрон обеспечивает обзор с высоты без участия пилота
- Фитнес-браслет считает шаги и потраченные калории вместо тренера
У них есть и другие общие признаки, о которых мы поговорим в следующей части модуля. Важно запомнить: робот может выглядеть как угодно.
Что робототехники называют роботом?
Как видите, внешнее сходство с живыми существами — не обязательный признак робота. По мнению специалистов, робота можно описать так:
Как следует из описания, робот может выглядеть как угодно. Роботом его делают «признаки робота», а не внешние признаки. Давайте разберёмся.
Как устроен робот и как он работает
Каждый робот — это набор конкретных деталей, а зачастую и программ, подобранных для выполнения нужных нам действий. Но чем бы ни занимался и из чего бы ни состоял наш робот, для совершения действия он всегда будет собирать информацию, анализировать её и действовать по результатам этого анализа.
Но чем бы ни занимался и из чего бы ни состоял наш робот, для совершения действия он всегда будет собирать информацию, анализировать её и действовать по результатам этого анализа.
Изучите схему, чтобы узнать, что делают привычные вам роботы на каждом из этапов и какие устройства при этом задействуют.
Шаг 1. Робот получает информацию или испытывает воздействие извне. Для этого он использует датчики, сенсоры и другие устройства. Сенсор движения, который включает электричество, когда мы входим в помещение, валидатор проездного в метро, микрочип для распознавания голоса в голосовых помощниках — всё это устройства для получения информации из окружающей среды.
Шаг 2. Робот перерабатывает полученную информацию по заранее заданному алгоритму. В разные времена и в разных ситуациях алгоритм работы задавали по-разному. Так, первые механические роботы начинали двигаться, когда их заводили, как часы. Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер даёт освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер даёт освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
Шаг 3. Робот выполняет нужную операцию..Программа или механизм решают, приводить робота в действие или нет. Если да — он включается и делает то, для чего предназначен. Свет включается будто сам собой, турникет метро открывается и пропускает пассажира, телевизор включается на нужной программе — это устройства, которые исполняют команды.
Как понять, что перед вами робот? Обязательные элементы
Определить, робот перед вами или нет, можно, обратив внимание на характерные признаки. У робота всегда есть:
- Система датчиков — через неё робот получает информацию из внешнего мира.
 Например, это датчики движения, сенсоры обнаружения препятствий и т. п.
Например, это датчики движения, сенсоры обнаружения препятствий и т. п. - Цель — «смысл жизни робота», та задача, ради автоматизации которой его придумали.
- Алгоритм действий — по нему робот выполняет нужные действия в разных условиях в соответствии с поставленной целью (сегодня это обычно программа, раньше мог быть механизм).
- Исполняющее устройство — двигатель, «руки», «ноги». То, что приводит робота в действие или изменяет его положение в пространстве.
- Система, в которую объединены первые четыре пункта, то, как они связаны и взаимодействуют.
 Например, это датчики движения, сенсоры обнаружения препятствий и т. п.
Например, это датчики движения, сенсоры обнаружения препятствий и т. п.Что часто добавляют к роботам. Дополнительные элементы
Датчик, алгоритм, исполняющее устройство — это основа, заложенная внутрь любого робота. Но обойтись только этим набором сложно. Чтобы робот мог решать больше задач, а работать с ним было удобнее, к основе часто добавляют разные детали. Ниже мы собрали самые популярные (но помните, что одними ими список не ограничивается).
Как заставить робота работать: 5 основных способов
Итак, роботы могут выглядеть по-разному, состоять из различных деталей и выполнять какие угодно задачи. Приводить их в действие тоже можно разными способами — одни известны веками, другие появились у человечества недавно.
Роботы бывают:
Механическими Заводные механические устройства использовали ещё древние греки, а первый антропоморфный механический робот появился в XII веке у арабов. В наши дни механику блестяще использует нидерландский художник Тео Янсен: его знаменитые «шагающие фигуры» приводятся в действие ветром, прибоем или человеком.
|
Гидравлические Такие роботы используют в работе законы движения жидкостей. Регулируя уровень и давление жидкости в системе, мы добиваемся от устройства нужных действий. Таких роботов часто можно встретить в промышленности: они способны прикладывать огромную силу и при этом работать быстро и аккуратно.
|
 Именно гидравлические приводы часто используются у роботов-грузчиков.
Именно гидравлические приводы часто используются у роботов-грузчиков.Электронные Первым таким роботом принято считать миниатюрное радиоуправляемое судно, которое разработал в конце XIX века Никола Тесла. В 1930-х появились первые устройства, которые напоминали человека и могли выполнить простейшие действия и даже воспроизводить отдельные фразы. Сегодня электронные элементы в роботах используются очень широко, но зачастую в комбинации с другими типами систем.
|
Софтверные Это роботы-программы, которые умеют взаимодействовать с объектами реального мира и давать осязаемый результат. «Умный дом» в городе, «умная теплица» на ферме, «умный климат-контроль» в офисе, программа, которая включает сеть уличного освещения по расписанию — это тоже роботы.
|
Комбинированные роботы Самый распространённый на сегодня вид роботов.
|
 Одного принципа работы часто не хватает для решения продвинутых задач, и инженеры соединяют внутри робота несколько систем. Например, фитнес-браслет тоже использует механическую составляющую: электронная энергия преобразуется в механическую энергию вибрации, и браслет даёт вам знать, что вы засиделись.
Одного принципа работы часто не хватает для решения продвинутых задач, и инженеры соединяют внутри робота несколько систем. Например, фитнес-браслет тоже использует механическую составляющую: электронная энергия преобразуется в механическую энергию вибрации, и браслет даёт вам знать, что вы засиделись.Очевидное — невероятное: почему чат-бот, квадрокоптер и фитнес-браслет тоже роботы
Любые устройства и программы могут считаться роботами при условии, что они делают что-то осязаемое и соответствуют другим признакам роботов. Давайте разберём это утверждение на нескольких примерах из современной жизни.
Чат-бот не робот, а обычная программа, если он: получает от вас вопрос, ищет ответ в поисковике и выдаёт его вам — это всего лишь программа, связанная с другими программами, он действует в виртуальном мире | Чат-бот — это софтверный робот, если он:
|
Беспилотный дрон — это классический робот: у него есть цель, система датчиков, алгоритм, управляющие устройства — система стабилизации, двигатели и т. | Квадрокоптер — это радиоуправляемый робот. Хотя направление движения ему задаёт человек (оператор) с земли, устройство само стабилизирует своё положение в пространстве, а потому может считаться роботом. |
 д.
д.
Фитнес-браслет — тоже робот. Он призван заменить нам тренера в простейших ситуациях и автоматизировать записи о физической активности, то есть у него есть цель. Он определяет движение, уровень нагрузок или состояние сна за счёт встроенной системы датчиков, работает по алгоритму и оказывает прямое воздействие на окружающую среду (например, вибрирует, напоминая человеку, что тот долго сидит — пора бы встать и немного размяться).
Заметили ошибку?
Расскажите нам об ошибке, и мы ее исправим.
История создания роботов пылесосов
Робот пылесос представляет собой автономный роботизированный пылесос, который имеет интеллектуальное программирование и ограниченную систему вакуумной очистки.
Первоначальная конструкция включала ручное управление с помощью дистанционного управления и режим «самостоятельного привода», который позволял машине автономно чистить без контроля человека.
В некоторых конструкциях используются вращающиеся щетки для достижения плотных углов. Другие сочетают в себе ряд функций очистки (вытирание, УФ-стерилизация и т. д.)
одновременно с всасыванием пыли, что делает машину нечто большим, чем просто роботом-пылесосом.
Первый робот пылесос Electrolux Trilobite был создан шведским производителем бытовой и профессиональной техники Electrolux. Electrolux удалось приобрести модель у своего изобретателя Джеймса Дайсона. В 1996 году одна из первых версий пылесоса Electrolux Trilobite была представлена в научной программе BBC «Мир завтрашнего дня». [1]
В 2001 году британская технологическая компания Dyson построила и продемонстрировала робота, известного как DC06. Однако из-за его высокой цены он никогда не выпускался на рынок.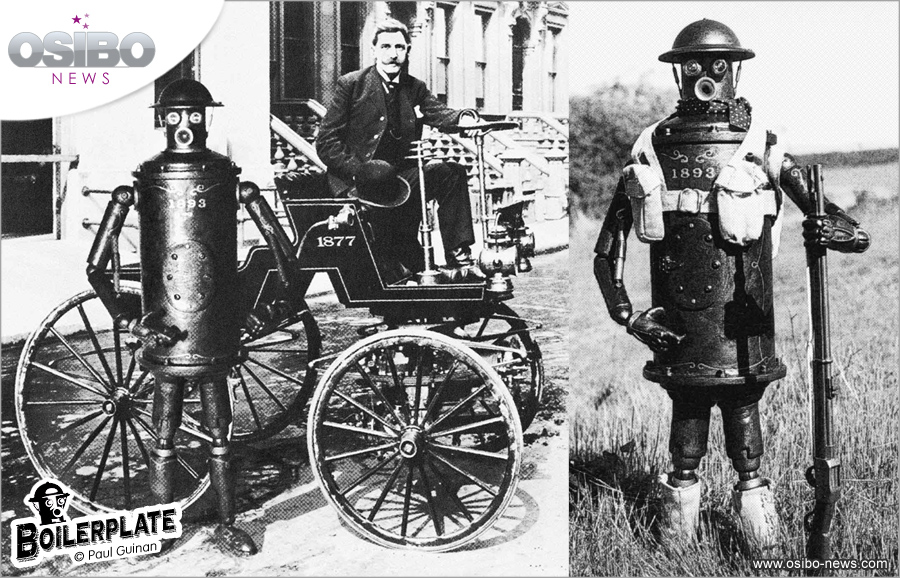
В 2002 году американская компания по передовым технологиям iRobot запустила робота для уборки пола Roomba. Первоначально iRobot решил произвести 15 000 единиц и еще 10 000 единиц в зависимости от успеха запуска. Roomba сразу стал огромной потребительской сенсацией. К рождественскому сезону iRobot выпустил 50 000 единиц, чтобы удовлетворить спрос на праздник. После этого успеха, основные специализированные розничные торговцы, а также более 4000 торговых точек, таких как Target, Kohl’s и Linens ‘n Things, начали продавать Roomba.
С 2002 года на рынке появились новые вариации роботизированных пылесосов. Например, канадский робот пылесос bObsweep, который как мопс, так и пылесос, или роботизированный пылесос Neato Robotics XV-11, который использует лазерное зрение, а не традиционные ультразвуковые датчики.
В 2014 году Дайсон объявил о выпуске своего нового роботизированного пылесоса под названием Dyson 360 Eye, оснащенного камерой на 360 градусов, которая установлена на верхней части пылесоса робота и должна обеспечивать лучшую навигацию, чем другие марки.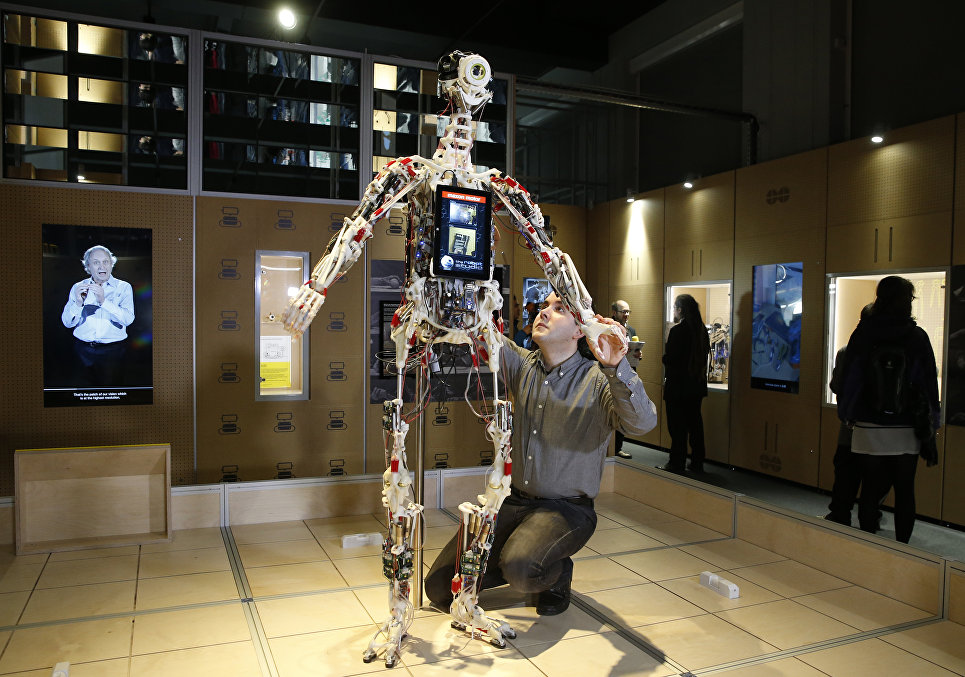 Релиз пылесоса был запланирован на выпуск только в Японии весной 2015 года с международными запусками, которые последуют в следующем году. Более того, Дайсон объявил, что 360 Eye всасывает в 2 раза сильнее любого другого робота пылесоса. Дайсон возглавляет рынок роботизированных пылесосов. Компания инвестирует в робототехнику, ИИ и в производство лучших роботов-пылесосов в ближайшие годы. Он приступил к созданию нового кампуса в Великобритании, для чего потребуется около 7000 рабочих мест и инвестиций в размере 330 млн. Фунтов стерлингов для создания более широкого исследовательского объекта в Сингапуре с упором на «связанные технологии и интеллектуальные машины».
Релиз пылесоса был запланирован на выпуск только в Японии весной 2015 года с международными запусками, которые последуют в следующем году. Более того, Дайсон объявил, что 360 Eye всасывает в 2 раза сильнее любого другого робота пылесоса. Дайсон возглавляет рынок роботизированных пылесосов. Компания инвестирует в робототехнику, ИИ и в производство лучших роботов-пылесосов в ближайшие годы. Он приступил к созданию нового кампуса в Великобритании, для чего потребуется около 7000 рабочих мест и инвестиций в размере 330 млн. Фунтов стерлингов для создания более широкого исследовательского объекта в Сингапуре с упором на «связанные технологии и интеллектуальные машины».
По состоянию на 2016 год 20% пылесосов являются роботами.
По состоянию на 2017 год 23% пылесосов являются роботами.
Поделиться
Все статьи
Unimate — первый промышленный робот
Произведя революцию в производстве во всем мире, Unimate стал самым первым промышленным роботом . Задуманный на основе конструкции механической руки, запатентованной в 1954 году (предоставленной в 1961 году) американским изобретателем Джорджем Деволом, Unimate был разработан в результате дальновидности и деловой хватки Джозефа Энгельбергера — отца робототехники .
Задуманный на основе конструкции механической руки, запатентованной в 1954 году (предоставленной в 1961 году) американским изобретателем Джорджем Деволом, Unimate был разработан в результате дальновидности и деловой хватки Джозефа Энгельбергера — отца робототехники .
На коктейльной вечеринке в 1956 году Джозеф Энгельбергер встретил изобретателя Джорджа Девола, и они заговорили о последнем изобретении Джорджа — его устройстве для запрограммированной передачи статей. «Мне кажется, что это робот», — воскликнул Энгельбергер, который глубоко увлекся роботами из-за своей любви к научно-фантастическим рассказам писателя Айзека Азимова.
В 1957 году Энгельбергер, который в то время был директором Consolidated Controls Corp. (дочерняя компания Condec), расположенной в Бетеле, штат Коннектикут, убедил генерального директора Condec профинансировать разработку изобретения Девола. После почти двух лет разработки Энгельбергер и Девол создали прототип — Unimate #001.
После почти двух лет разработки Энгельбергер и Девол создали прототип — Unimate #001.
К 1961 году серия Unimate 1900 стала первым серийным роботом-манипулятором для автоматизации производства.
Помня о тяжелой битве, которую ему предстоит вести с производителями, и руководствуясь тремя законами робототехники Азимова, которые касаются философии «сначала не навреди», аналогичной клятве Гиппократа, Энгельбергер сосредоточился на использовании роботов в задачах, вредных для человека. Его стратегия сработала, и в 1959 прототип Unimate #001 массой 2700 фунтов был впервые установлен на сборочной линии на литейном заводе General Motors в Трентоне, штат Нью-Джерси. К 1961 году серия Unimate 1900 стала первым серийным роботом-манипулятором для автоматизации производства. За очень короткий период времени в литье под давлением было задействовано около 450 роботов-манипуляторов Unimate.
В 1961 году Энгельбергер основал Unimation, Inc. , компанию Condec Corp. в Данбери, штат Коннектикут, для развития бизнеса в недавно созданной индустрии робототехники, которую он создал. В том же году Энгельбергер представил Unimate 19.00 публике на выставке в Cow Palace в Чикаго. В 1966 году телезрители по всему миру впервые увидели робота, когда Джонни Карсон приветствовал Unimate на вечернем шоу. В этой прямой трансляции из студии NBC в Нью-Йорке Энгельбергер заставил робота выполнить несколько трюков, чтобы поразить зрителей, в том числе забить мяч для гольфа в чашку, налить пиво и дирижировать группой Tonight Show.
, компанию Condec Corp. в Данбери, штат Коннектикут, для развития бизнеса в недавно созданной индустрии робототехники, которую он создал. В том же году Энгельбергер представил Unimate 19.00 публике на выставке в Cow Palace в Чикаго. В 1966 году телезрители по всему миру впервые увидели робота, когда Джонни Карсон приветствовал Unimate на вечернем шоу. В этой прямой трансляции из студии NBC в Нью-Йорке Энгельбергер заставил робота выполнить несколько трюков, чтобы поразить зрителей, в том числе забить мяч для гольфа в чашку, налить пиво и дирижировать группой Tonight Show.
К 1966 году Engelberger стремился расширить клиентскую базу за пределами Соединенных Штатов. Он выдал Nokia из Финляндии лицензию на производство роботов в Скандинавии и Восточной Европе. После приглашения поговорить с 400 японскими руководителями в Токио, которые интересовались робототехникой для производства, Энгельбергер подписал лицензионное соглашение в 1919 году.69 с Kawasaki Heavy Industries (теперь Kawasaki Robotics) для производства и продажи роботов Unimate для азиатского рынка.
На этой стороне пруда General Motors опередила своих конкурентов и стала самым автоматизированным автомобильным заводом в мире. В 1969 году компания восстановила свой завод в Лордстауне, штат Огайо, установив роботов для точечной сварки Unimate. Способные к никогда ранее не достигаемой скорости производства, роботы производили 110 автомобилей в час — более чем в два раза больше, чем любой автомобильный завод, существовавший в то время! С помощью Unimate компания GM произвела революцию в автомобильной промышленности. Европейцы быстро последовали их примеру, и такие компании, как BMW, Volvo, Mercedes Benz, British Leyland и Fiat, установили роботов-манипуляторов Unimate для выполнения неприятных и опасных для людей работ, что очень важно для Энгельбергера.
От двухмерного рисунка до промышленной и социальной революции робот Unimate остается одним из самых значительных вкладов за последние сто лет не только в производство, но и в цивилизацию. Он оставил живое наследие в отрасли, которую он породил. В результате Unimate область робототехники продолжает расширяться за пределы производства практически во все аспекты человеческой жизни и обслуживания.
Он оставил живое наследие в отрасли, которую он породил. В результате Unimate область робототехники продолжает расширяться за пределы производства практически во все аспекты человеческой жизни и обслуживания.
1921 и первые роботы
Роботы, какими мы их знаем сегодня, прошли долгий путь. От полностью автономных автомобилей до роботов в больницах и на улицах. В следующие 10-15 лет мы, вероятно, будем задаваться вопросом, что мы когда-либо делали без них, как со смартфонами и другими общедоступными технологиями.
Карел Чапек и первое использование слова «робот»
Первый в мире «робот» не был разработан до конца 1960-х годов. Но первые упоминания о нечеловеческом существе, работающем автономно, появились в театральной постановке 19 века.21. В бывшей Чехословакии, в столице Праге, слово «робот» использовалось в пьесе под названием R.U.R. (сокращение от Rossum’s Universal Robots), написанное Карелом Чапеком. Интересно отметить, что слово «роботы» использовалось для обозначения искусственных людей, сделанных не из металла, а из химического соединения и имеющих форму человека.
Эти сильные роботы могут выполнять работу, эквивалентную двум с половиной мужчинам-рабочим. Эти роботы используются повсюду, чтобы человечество было освобождено от работы и могло работать над улучшением себя и своих ценностей.
Однако вскоре эти роботы осознают, что у них «нет страсти, истории и души». Они понимают, что они намного сильнее и умнее своих создателей-людей, и поэтому уничтожают всех людей на планете. Все, кроме одного, только для того, чтобы подать пример.
В этой пьесе были идеи, которые по сей день копируют научно-фантастические фильмы, сериалы и игры.
Робот Шаки
Но, если не считать первого упоминания о роботе, настоящие роботы появились 40 лет спустя. В конце 19В 60-х и начале 1970-х годов исследователи из Центра искусственного интеллекта Стэнфордского исследовательского института (в настоящее время известного как Stanford Research International) разработали первого робота, каким мы его знаем сегодня.
Робот Шейки
Хотя на самом деле мы мало что знаем о Шейки, так как большая часть информации спрятана в Стэнфордских архивах, мы знаем, что этот робот способствовал развитию искусственного интеллекта и робототехники.
Shakey — первый известный мобильный робот с искусственным интеллектом. Он мог думать самостоятельно и принимать решения на основе шаблона. Робот представлял собой высокий набор с антенной для радиосвязи наверху, чтобы при необходимости получать команды и отправлять данные. Датчики приближения представляли собой устаревшие гидролокаторы, подобные тем, которые использовались на больших кораблях. У него также была одна из первых мобильных камер в виде большой телекамеры, чтобы видеть, что находится впереди, и передавать это исследователям. У него есть детекторы ударов, которые были просто причудливым словом для провода вокруг его основного корпуса. Все это приводилось в движение колесами.
Робот Шейки в Музее компьютерной истории
Основным мозгом Шейки был SD-940 с 64 КБ 24-битной памяти в начале своей жизни, но затем в 1969 году он был увеличен на большую емкость. Эта емкость была 192 КБ 36-битной микросхемой слова. что примерно эквивалентно 1,3 Мб.
Обработка искусственного интеллекта была выполнена в QA3. В качестве языков программирования использовались FORTRAN и Lisp. Позже в своей жизни решение проблем было выполнено в STRIPS.
В качестве языков программирования использовались FORTRAN и Lisp. Позже в своей жизни решение проблем было выполнено в STRIPS.
Unimate Pumo 500
Первый программируемый робот — Unimate
Unimate был создан американским изобретателем Джорджем Деволом. Он подал патент на этого робота в 1954 году, но позже получил этот патент в 1961 году. Многие признают, что работы Джозефа Энгельбергера сильно вдохновили и непосредственно повлияли на разработку Unimate. Энгельбергер, также известный как отец робототехники, встретился с Деволом на вечеринке в 1956 году. На этой встрече родился один из первых известных нам промышленных роботов — Unimate #001.
Энгельбергер убедил генерального директора Condec профинансировать изобретение Девола. Деволу потребовалось два года, чтобы поработать над этим изобретением и довести его до совершенства в Unimate #001. Сначала Unimate был встречен с осторожным подозрением, но как только его возможности увидели на заводе General Motors; он быстро стал популярным.
В 1959 году первый Unimate был установлен на сборочной линии General Motors, а также на литом заводе в Трентоне, штат Нью-Джерси. Интересно отметить, что Unimate приобрел большую популярность на заводе по литью под давлением, чем на сборочной линии General Motors, поскольку робот мог очень легко справляться с горячими веществами и рабочей средой, даже не жалуясь.
Примерно в 1961 году было запущено массовое производство серии Unimates 1900, и 450 из них были заняты в основном литьем под давлением. Но оттуда роботы быстро распространились по всему миру, отчасти благодаря усилиям Энгельбергера. Он создал Unimation Inc., чтобы заботиться об индустрии автоматизации в новом мире, и оттуда он распространил ее по всему миру. Unimate дебютировал на телевидении с Джонни Карсоном и поразил публику тем, насколько искусным был робот. Робот открыл пиво, ударил мячом в цель и даже дирижировал концертной группой.
Unimate Pumo 500
После 1966 года Энгельбергер связался с телекоммуникационной компанией Nokia в Финляндии для дальнейшего распространения Unimate в Европе. Но на самом деле, когда Энгельбергер встретился с японскими руководителями в Токио, Unimate действительно поразил мир своим мастерством. Около 400 руководителей боролись за Unimate, и в конце концов приз достался Kawasaki Heavy Industries. Затем Кавасаки продемонстрировал миру результаты тяжелой работы Unimate через свои автомобили, мотоциклы и тяжелую технику.
Но на самом деле, когда Энгельбергер встретился с японскими руководителями в Токио, Unimate действительно поразил мир своим мастерством. Около 400 руководителей боролись за Unimate, и в конце концов приз достался Kawasaki Heavy Industries. Затем Кавасаки продемонстрировал миру результаты тяжелой работы Unimate через свои автомобили, мотоциклы и тяжелую технику.
Европа и Азия были завоеваны Unimate, и на родине дела обстояли не иначе. General Motors оставила всех своих конкурентов далеко позади благодаря огромному количеству автомобилей, которые она производила. Модель Unimate была расширена до модели Unimate для точечной сварки, что увеличило производительность до 110 автомобилей в час. Другие компании без роботов делали меньше половины этой суммы.
Европейские производители, такие как BMW, Mercedes, Volvo и многие другие, прислушались к General Motors и быстро установили роботов Unimate на своих заводах. Unimate продолжал распространяться не только в автомобилестроении, но и в других отраслях промышленности, особенно в местах, опасных для человека.