Содержание
как управлять планетоходом за сотни миллионов километров — Транспорт на vc.ru
Эван Хильгеманн, инженер-механик из Лаборатории реактивного движения НАСА, рассказал, как марсоходы изучают планету и передвигаются вдалеке от Земли. Публикуем перевод его текста в блоге Selectel.
5931
просмотров
Немногим более года назад мне повезло: я стал частью команды ученых и инженеров, ответственной за управление марсоходом «Кьюриосити». С тех пор я узнал МНОГО нового о марсоходах. Но еще больше только предстоит узнать. «Спирит», «Оппортьюнити», «Кьюриосити» и «Персеверанс» — одни из самых сложных и в то же время надежных роботов, когда-либо созданных человеком. В то же время инструменты и методы, которые применяются для управления марсоходами, достаточно просты в освоении и доступны пониманию. И это хорошо, поскольку 18 февраля «Персерванс» опустится на поверхность Марса, после чего его отправят на изучение планеты. Сейчас моя задача — рассказать о том, как управлять марсоходом. Когда новый ровер прилетит на Марс, вы уже будете понимать, что происходит и как все это работает.
Когда новый ровер прилетит на Марс, вы уже будете понимать, что происходит и как все это работает.
Большая часть этой статьи — изложение моего опыта управления «Кьюриосити». Имейте в виду, что «Спирит» и «Оппортьюнити» во многом похожи в этом плане на своего «наследника». Для управления «Персерванс» будут использоваться те же технологии и методы, так что слишком значительных отличий нет.
Основы
Главное, что нужно знать, — Марс от нас очень, очень далеко. Радиосигнал, отправленный с Земли, достигает поверхности Марса через 22 минуты. Поэтому управление в режиме реального времени — не вариант. Кроме того, «Кьюриосити» получает информацию с Земли раз в день. Все остальное время он предоставлен сам себе. При этом о какой-либо автономности речь не идет: у марсохода ограниченный набор действий, которые он может выполнять самостоятельно. Большая часть того, что делает ровер, запланировано и прописано в памяти устройства еще на Земле.
Конечно, есть и парочка исключений: некоторые проблемы марсоход должен уметь решать самостоятельно.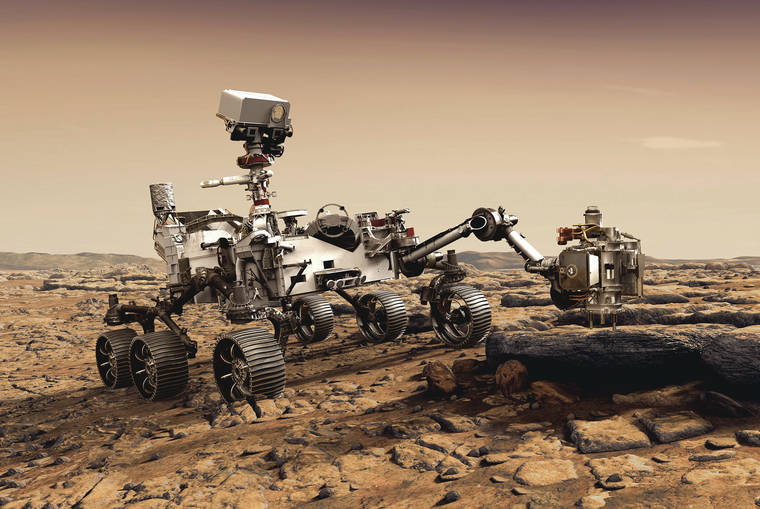 Но большинство таких решений» — остановка и ожидание инструкций с Земли в ответ на какой-либо внешний фактор. Определенной степенью автономности обладает Aegis — система, которая может самостоятельно выбрать кусок породы, в который «Кьюриосити» должен «выстрелить» лазером.
Но большинство таких решений» — остановка и ожидание инструкций с Земли в ответ на какой-либо внешний фактор. Определенной степенью автономности обладает Aegis — система, которая может самостоятельно выбрать кусок породы, в который «Кьюриосити» должен «выстрелить» лазером.
Смотри под ноги
Главная задача оператора ровера — обеспечить его безопасность на протяжении всего пути на Марсе. Поэтому надо тщательно оценивать все возможные варианты своих действий. У марсоходов НАСА есть несколько камер, благодаря которым ровер формирует «картинку», как бы увиденную глазами человека. Есть также hazcams, «камеры опасности», которые оценивают наличие проблем поблизости, а также navcams — навигационные камеры, оценивающие дорогу впереди. Есть еще и другие камеры, которые, правда, по большей части используются для выполнения научных задач, поэтому я воздержусь от описания принципа их работы.
В большинстве случаев для визуальной оценки участка пути ровера используются как раз navcams. Изображения, получаемые ими, можно посмотреть в качестве объемной «картинки» на Земле. В НАСА разработали специализированное ПО, которое предназначено для визуализации окружающей ровер местности и для создания виртуальной модели ровера и участка ландшафта вокруг него. Эта виртуальная модель используется для тестирования планируемых операторами действий. Если эмуляция прошла хорошо, команды можно отправлять на Марс. Таким образом, ученые избавляют себя от возможных негативных последствий отправки непроверенной команды.
Изображения, получаемые ими, можно посмотреть в качестве объемной «картинки» на Земле. В НАСА разработали специализированное ПО, которое предназначено для визуализации окружающей ровер местности и для создания виртуальной модели ровера и участка ландшафта вокруг него. Эта виртуальная модель используется для тестирования планируемых операторами действий. Если эмуляция прошла хорошо, команды можно отправлять на Марс. Таким образом, ученые избавляют себя от возможных негативных последствий отправки непроверенной команды.
Вот как выглядит эмуляция движения ровера после того, как модель полностью готова. Серые области — участок Марса, по которому роверу предстоит проехать в ближайшем будущем. Оранжево-коричневые линии — это, собственно, путь ровера. В день моделируется около 30 метров поверхности, камеры просто не могут собрать больше информации, поэтому марсоход проезжает именно столько.
А вот наложение смоделированного пути ровера на реальные снимки, полученные навигационными камерами.
При планировании движения марсохода нужно учитывать несколько важных моментов. Например, размер объектов, встречающихся по пути. Максимальный размер, с которым может справиться ровер, — около 50 см. Все, что больше, нужно обогнуть. Песок (это не совсем песок, но будем называть его так) тоже желательно огибать: если его много, ровер может застрять. Даже небольшие куски породы представляют собой опасность, так как их острые края повреждают колеса ровера.
Быстро, не очень или медленно?
После того как ученые определились с направлением движения, нужно понять, как именно двигаться. Есть три режима: слепой режим, визуальная одометрия и autonav.
Слепой режим — самый простой способ движения из возможных. Марсоход в этом случае будет следовать инструкциям, присланным с Земли, и не обращать ни на что внимания. В идеале это отличный метод управления марсоходом, но условия на Марсе далеки от идеала. Зачастую внешние факторы влияют на продвижение к цели. Это может быть, например, скольжение колес по поверхности, так что марсоход вместо того, чтобы продвинуться на 10 метров, продвигается на 9 или даже 5.
Это может быть, например, скольжение колес по поверхности, так что марсоход вместо того, чтобы продвинуться на 10 метров, продвигается на 9 или даже 5.
Отличный способ понять, что такое слепое управление, — закрыть глаза и попробовать пройти по определенной траектории. Например, 7 метров вперед, затем повернуть на 30 градусов налево и пройти еще 4 метра. Мы в этом случае вообще не представляем, что происходит вокруг, и не адаптируемся к меняющимся условиям.
В целом, слепое управление — не лучший вариант, но он позволяет марсоходу двигаться быстро, поскольку системе не нужно останавливаться для того, чтобы сделать снимки. На максимальной скорости марсоход может проехать на длину футбольного поля всего за час. Но этот вариант выбирается только в том случае, если вокруг нет потенциально опасных объектов.
Визуальная одометрия применяется операторами чаще. В этом случае марсоход останавливается через каждый метр для того, чтобы сделать снимок грунта камерами. Бортовой компьютер затем оценивает изображение, сравнивает его с предыдущим и пытается понять, что изменилось вокруг, включая местоположение марсохода. Затем компьютер отправляет новые навигационные команды, позволяющие держаться запланированного пути.
Затем компьютер отправляет новые навигационные команды, позволяющие держаться запланированного пути.
Этот способ похож на предыдущий, только в процессе продвижения каждые пару шагов нужно останавливаться, чтобы открыть глаза и оглядеться.
Визуальная одометрия — баланс между скоростью и точностью движения. Метод крайне важен, поскольку помогает обнаружить препятствия на пути ровера и избежать их.
Автонавигация, или autonav, — наиболее технологически совершенный метод. Его можно сравнить с использованием беспилотника в автомобиле. Задаем общую цель и ровер сам ищет безопасный и быстрый путь к цели. Марсоходу приходится останавливаться через каждый метр, чтобы оценить обстановку при помощи камер. Но вместо того, чтобы сделать один снимок при помощи навигационных камер, марсоход задействует и hazcams. Затем бортовой компьютер объединяет всю эту информацию, формируя «карту опасности». Проблемные места отмечены красным цветом, места, где ситуация не столь плачевна, — желтым, а максимально подходящая для продвижения роутера местность отмечается зеленым цветом.
Это самый медленный вариант продвижения для марсохода. Если в идеальной ситуации ровер может пройти на длину футбольного поля при помощи слепого метода, как говорилось выше (это примерно 100 м), то в случае автономного режима в идеальных условиях марсоход пройдет всего 30 метров.
При этом ровер не умеет обнаруживать песок или острые камни, так что метод используют только тогда, когда местность абсолютно безопасна.
Чего можно ждать от «Персеверанс»?
НАСА ожидает, что новый марсоход опустится на поверхность планеты уже 18 февраля. После этого, надеюсь, он начнет продвижение по Марсу. Все, о чем я говорил выше, относится и к новому марсоходу, но у него больше возможностей. Например, он сможет двигаться минимум в два раза быстрее «Кьюриосити»: у бортового ПК больше вычислительных ресурсов и улучшенные алгоритмы обработки данных. Навигационные камеры робота цветные, они получают изображения большего, нежели у «Кьюриосити», разрешения. Кроме того, колеса у ровера толще, чем у предшественника, и другой рисунок протекторов. Ученые считают, что колеса будут меньше повреждаться.
Ученые считают, что колеса будут меньше повреждаться.
Одна из важнейших задач для марсохода: сбор и хранение образцов для возвращения на Землю. От успеха этой миссии зависит очень многое. И теперь, когда ровер начнет двигаться, вы будете понимать, что и как обеспечивает это движение.
Оставайтесь с нами в 2021 году, подписывайтесь на блог Selectel.
Как управлять марсоходом
Марсоход «Кьюриосити», запущенный в рамках программы NASA «Марсианская научная лаборатория», начал исследовать Красную планету почти семь лет назад. За это время марсоход проехал около 20 километров. По земным меркам это немного, но если вспомнить, насколько сложно управлять аппаратом, передвигающимся по поверхности Марса, приходится признать: это огромное достижение ученых, инженеров и программистов, участвующих в проекте. Но как именно работают «водители» марсохода? Об этом мы поговорили с Алексеем Малаховым, старшим научным сотрудником отдела ядерной планетологии Института космических исследований РАН, отвечающим за работу российского научного прибора ДАН на борту ровера. В рамках этого проекта ИКИ активно взаимодействует с американской стороной, в том числе по вопросам выбора очередных целей для изучения.
В рамках этого проекта ИКИ активно взаимодействует с американской стороной, в том числе по вопросам выбора очередных целей для изучения.
Межпланетная связь
В отличие от советских луноходов, «Кьюриосити» не имеет постоянной круглосуточной связи со своими наземными операторами. Советский «Луноход-2» вообще был принципиально иной машиной, близкой к современному марсоходу разве что по массе (836 и 899 килограмм соответственно). Он был создан на базе луномобиля для советских космонавтов, и способность ездить самостоятельно для него не предусматривалась.
Конечно, телеуправление «Луноходом-2» в реальном времени не было идеальным — картинка с камер аппарата обновлялась лишь раз в четыре секунды. Удаленный советский экипаж, состоявший из командира, штурмана и оператора остронаправленной антенны, должен был приспосабливаться к тому, что от картинки до подачи сигнала проходит заметная пауза. И все же это было ручное управление, а не «пошаговое», как у американских планетоходов на Марсе.
Сеансы связи «Кьюриосити» с Землей происходят лишь дважды в сутки, в начале и в конце марсианского дня, причем не напрямую. В теории марсоход способен передавать данные на Землю через собственную антенну, но на практике его передатчикам для этого не хватает энергии. Поэтому связь осуществляется через спутники, вращающиеся вокруг Марса, — Mars Odyssey, Mars Reconnaissance Orbiter и Trace Gas Orbiter.
Каждый из двух суточных сеансов связи ограничен временем, в течение которого конкретный спутник находится в зоне видимости марсохода. Сеансы коротки, порядка десятка минут, в самом лучшем случае — десятков минут, в зависимости от наклона орбиты и высоты орбиты спутника.
Это весьма неудобно: задержка между поступлением информации с камер достигает дюжины часов, в то время как для советских луноходов она составляла считанные секунды. Возникает вопрос: почему нельзя обеспечить постоянную связь через висящий над Марсом спутник? Ведь в окрестностях Земли есть спутники на геостационарной орбите, постоянно висящие над одной и той же точкой нашей планеты.
Для Марса такая орбита тоже есть, она называется ареостационарной. Но дело в том, что она находится на высоте около 17 тысяч километров над поверхностью планеты (большая полуось, или среднее расстояние от этой орбиты до центра планеты, составляет 20 428 километров). Это значит, что ареостационарная орбита пролегает между орбитами Деймоса (большая полуось орбиты — 23 458 километров) и Фобоса (9 376 километров). Спутник связи, если его туда послать, окажется под воздействием гравитации сразу двух близких тел, «дергающих» его в противоположных направлениях.
Это обстоятельство, а также специфика распределения масс в разных точках Марса означают, что на ареостационарной орбите спутник должен будет включать двигатели для удержания своей орбиты раз в несколько дней, а не раз в несколько недель, как на аналогичной орбите у Земли. Иными словами, он или будет массивнее околоземного геостационарного аналога, или проживет совсем недолго.
Возможно, именно с этими трудностями связано то, что NASA, еще в 1999 году анонсировавшее развертывание спутников связи на ареостационарной орбите, так и не реализовало свои планы и даже ликвидировало соответствующий раздел на своем сайте.
Именно поэтому роль спутников связи на Марсе выполняют научно-исследовательские спутники, чья главная задача — картографировать поверхность Марса и собирать о ней другие данные. По словам Алексея Малахова, обеспечение связи с марсоходом для них — дополнительная нагрузка, по большому счету, не соответствующая их прямому назначению.
Но нормальной связи между «Кьюриосити» и Землей мешает не только все вышеперечисленное. Раз в два года Марс и Земля оказываются в положении, когда Солнце блокирует Красную планету от электромагнитных волн с Земли. Состояние это длится примерно месяц (в 2019 году оно придется на август-сентябрь), и, конечно, в течение всего этого времени управлять марсоходом или получать от него научные данные невозможно. Поэтому аппарат просто впадает в «спячку».
Стратегия для марсохода
Большие разрывы в связи означают, что «луноходный» подход (работа в реальном времени) для марсохода в принципе невозможен. Куда больше управление им похоже на пошаговую компьютерную стратегию.
Обычно ситуация выглядит так. В во второй половине марсианского светового дня данные от «Кьюриосити» отправляются наземным станциям NASA, а от них — операторам. Те рассматривают снимки объектов, окружающих марсоход (как правило, речь идет о черно-белых снимках относительно низкого разрешения с технических камер контроля перемещения), и выбирают наиболее интересные с научной точки зрения. У миссии есть ведущий ученый, и под его руководством другие ученые, работающие с разными приборами, вырабатывают общую точку зрения на то, куда в данный момент лучше всего направить марсоход.
Как отмечает Алексей Малахов, иногда, естественно, возникают определенные разногласия: одним исследователям больше интересен один вариант действий, вторым — другой. Но все эти противоречия решаются в рабочем порядке.
«Динамическое Альбедо Нейтронов» (ДАН) — российский научный прибор на борту «Кьюриосити». Он содержит импульсный нейтронный генератор, испускающий быстрые нейтроны (до 107 на импульс) микросекундными «пакетами», и приемник нейтронного излучения в тепловом и эпитепловом диапазонах. Нейтроны проникают в грунт Марса, где взаимодействуют с ядрами основных породообразующих элементов, замедляясь и теряя энергию. Часть замедлившихся нейтронов поглощается грунтом, а часть выходит обратно на поверхность, где их регистрирует приемник нейтронного излучения.
Нейтроны проникают в грунт Марса, где взаимодействуют с ядрами основных породообразующих элементов, замедляясь и теряя энергию. Часть замедлившихся нейтронов поглощается грунтом, а часть выходит обратно на поверхность, где их регистрирует приемник нейтронного излучения.
Если в грунте присутствуют водородосодержащие соединения (связанная вода или водяной лед), то замедление быстрых нейтронов происходит наиболее эффективно, поскольку при столкновении с ядром водорода нейтрон теряет сразу половину своей энергии. Это делает российский прибор незаменимым инструментом для поиска следов воды в грунте Марса.
Во время движения «Кьюриосити» ДАН работает в «пассивном» режиме, измеряя естественное нейтронное излучение от Марса. Во время остановок ДАН переходит в «активный» режим — с включением нейтронного генератора и измерением отклика поверхностных пород от искусственных нейтронов, которыми их обстреливает генератор.
К 7 июля 2019 года ДАН провел почти 5000 пассивных измерений и около 1000 активных. В общей сложности генератор выдал около 10 миллионов нейтронных импульсов. Ресурс прибора, назначенный производителем, давно истек, но блок продолжает исправно работать. За это время ДАН побывал на более чем 700 «стоянках» марсохода.
В общей сложности генератор выдал около 10 миллионов нейтронных импульсов. Ресурс прибора, назначенный производителем, давно истек, но блок продолжает исправно работать. За это время ДАН побывал на более чем 700 «стоянках» марсохода.
В среднем в районе кратера Гейла, где уже семь лет путешествует «Кьюриосити», ДАН смог найти 1-2 процента воды по массе в грунте. В отдельных местах ДАН нашел в грунте и 3–5 процентов воды по массе, но таких точек немного (до 10 процентов от общего числа измерений).
Определившись с тем, что в данный момент окружает аппарат, ученые составляют для него план работы на следующий рабочий цикл — двигаться ли ему дальше или, например, сверлить грунт в заранее намеченной точке. Общая циклограмма работы (точное расписание команд, подаваемых на исполнительные органы технических комплексов) складывается из предложений участников всех экспериментов а затем посылается антенной дальней космической связи на борт аппарата.
По словам Алексея Малахова, наземная команда управления подстраивается так, чтобы первый сеанс связи приходился на начало процесса планирования, а второй — на завершающий этап, когда циклограмма уже составлена и готова к отправке. Как правило, план работы «Кьюриосити» определяется на несколько суток вперед, но после каждого сеанса связи в него могут вноситься уточнения, связанные с перемещением марсохода. Это неизбежно, потому что каждые сутки аппарат присылает новые снимки, на которых видны новые объекты — или новые препятствия, возникающие на его пути.
Как правило, план работы «Кьюриосити» определяется на несколько суток вперед, но после каждого сеанса связи в него могут вноситься уточнения, связанные с перемещением марсохода. Это неизбежно, потому что каждые сутки аппарат присылает новые снимки, на которых видны новые объекты — или новые препятствия, возникающие на его пути.
Кто ведет
«Кьюриосити» отличает от луноходов тем, что он в самом деле едет сам, без постоянного присмотра операторов с Земли, ведь управлять им напрямую с нашей планеты, учитывая ситуацию со связью, невозможно. Для этого на борту марсохода имеется компьютер с процессором частотой 200 мегагерц и оперативной памятью на 256 мегабайт. Еще два гигабайта постоянной памяти размещены на флэш-накопителях. Управляет всем этим операционная система жесткого реального времени VxWorks.
Это позволяет марсоходу двигаться в двух режимах, каждый из которых подразумевает не только простое следование командам, но и собственные действия. Первый из них — «слепое» вождение. Его применяют, когда камеры аппарата на момент сеанса связи дают достаточно ясное изображение маршрута и наземные планировщики могли определить, нет ли на нем серьезных препятствий. После этого аппарату поступает команда проехать определенную дистанцию в определенном направлении «вслепую», то есть без использования камер.
Его применяют, когда камеры аппарата на момент сеанса связи дают достаточно ясное изображение маршрута и наземные планировщики могли определить, нет ли на нем серьезных препятствий. После этого аппарату поступает команда проехать определенную дистанцию в определенном направлении «вслепую», то есть без использования камер.
Чтобы планетоход понял, что уже проехал заданную дистанцию, его компьютер следит за вращением колес, подсчитывая число полных поворотов (63 сантиметра пути на один полный поворот без буксовки). Этот режим обеспечивает максимальную скорость движения «Кьюриосити» — до 0,04 метра в секунду, в 40 раз медленнее человека-пешехода на Земле.
При езде вслепую компьютер марсохода не проверяет по камерам, происходила ли по пути пробуксовка. Поэтому существует второй режим движения, связанный с огибанием препятствий. Его активируют, если маршрут не свободен для «слепой езды». Он требует частых остановок для получения стереоизображения в направлении движения, после чего бортовое ПО марсохода анализирует «картинку».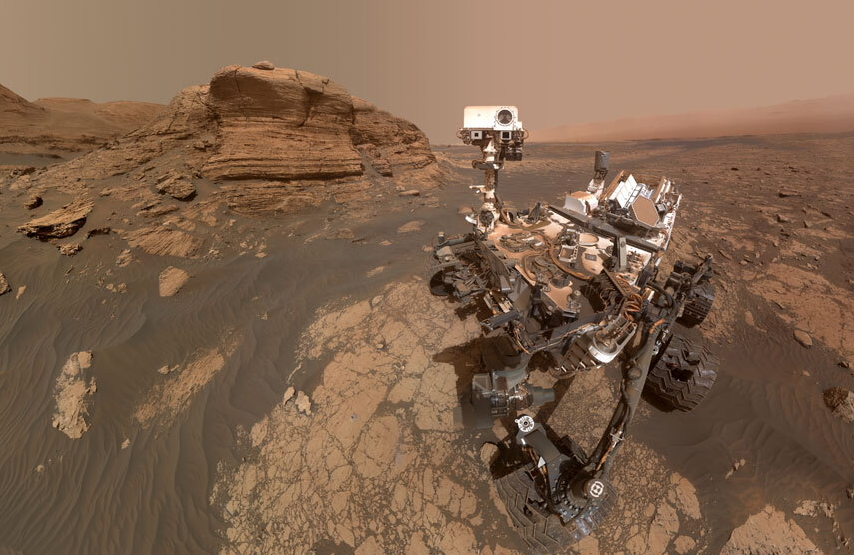 При этом ПО исходит из переменных, заданных планировщиками, например останавливается для анализа изображения через строго заданные промежутки времени. Также операторы могут выбрать, какой именно тип решений примет аппарат, если обнаружит препятствие, — остановится до конца рабочего дня или продолжит движение.
При этом ПО исходит из переменных, заданных планировщиками, например останавливается для анализа изображения через строго заданные промежутки времени. Также операторы могут выбрать, какой именно тип решений примет аппарат, если обнаружит препятствие, — остановится до конца рабочего дня или продолжит движение.
Этот режим намного безопаснее первого. Два предшественника «Кьюриосити», марсоходы «Оппортьюнити» и «Спирит» при движении забуксовали, и «Спирит» в результате погиб. Причем он завяз в месте, которое на камерах выглядело безопасным. Но под тонкой коркой ровной поверхности скрывался сыпучий материал, и когда колеса планетохода пробили корку, выбраться аппарат уже не смог.
Понятно, почему «Кьюриосити» движется с такой осторожностью. Но за безопасность приходится платить: скорость марсохода в этом режиме падает до 0,02 метра в секунду, то есть в 80 раз медленнее земного пешехода.
Для дополнительной безопасности есть еще третий режим — визуальной одометрии. В нем марсоход делает остановки и с помощью камер оценивает расстояние, пройденное им за время движения. Затем он сравнивает его с числом оборотов колес. Если расстояние по камерам получается много меньше, чем то, что «насчитал» компьютер, значит, колеса буксуют практически на одном месте.
Затем он сравнивает его с числом оборотов колес. Если расстояние по камерам получается много меньше, чем то, что «насчитал» компьютер, значит, колеса буксуют практически на одном месте.
Операторы могут установить лимит допустимой пробуксовки, чтобы марсоход, наткнувшись на труднопроходимый участок, остановился и подождал следующего сеанса связи, дав операторам возможность принять решение о продолжении движения.
«Сто метров — максимум»
Может показаться, что система движения марсохода чрезмерно усложнена, что снижает скорость его движения и сбора научных данных. Однако для планетоходов это норма. Еще операторы «Лунохода-1» отмечали, что выбирали маршрут движения, избегая опасных элементов рельефа — крупных камней, на которых аппарат может опрокинуться, плохо проходимых участком с рыхлым реголитом и тому подобных.
Но луноходы напрямую управлялись человеком практически в режиме реального времени, а не ежесуточными циклограммами. Если их оператор допускал ошибку, ее можно было быстро исправить. В этом — одна из причин, по которой луноходы передвигались на порядок быстрее марсоходов.
В этом — одна из причин, по которой луноходы передвигались на порядок быстрее марсоходов.
Команда управления «Кьюриосити», по словам Алексея Малахова, «очень дотошно и аккуратно» следит за тем, чтобы правильно выбрать маршрут и избежать препятствий. Плюс к этому аппарат с помощью гироскопов следит за углом своего наклона относительно поверхности, чтобы в случае, если допустимый угол окажется превышен, немедленно остановить движение.
По этой же причине длина одного суточного передвижения марсохода никогда не планируется на Земле «вслепую» — дальше, чем позволяет увидеть очередной снимок. «Кьюриосити» редко преодолевает больше нескольких метров или нескольких десятков метров за один цикл планирования. «Сто метров — это максимум из того, что я вообще помню», — говорит Алексей Малахов.
И даже для таких коротких отрезков операторы используют много вспомогательных наземных инструментов, помогающих оценить опасность столкновения с непроходимым препятствием, вплоть до 3D-стереомоделирования марсианской поверхности.
Может возникнуть вопрос: почему на марсоход нельзя поставить такой же мощный искусственный интеллект, как у беспилотников Waymo, чтобы он самостоятельно планировал маршрут? Кажется, это позволило бы быстрее двигаться от точки к точке.
На это можно ответить так. Семь лет назад, когда «Кьюриосити» готовился к старту с земли, успехи искусственного интеллекта в беспилотном вождении еще не были так велики, как сегодня. Но главное, хотя «Кьюриосити» и является самым мощным марсоходом в истории, его мощность не превышает 110 ватт. Это в полтора раза ниже электрической мощности советских луноходов.
При движении ему необходимо снабжать энергией несколько электромоторов, камеры и научные инструменты. Для нужд компьютера остается не больше десятка ватт. Типичные компьютеры современных беспилотных авто требуют 500 ватт. К тому же электроника планетоходов должна быть устойчивой к жесткому радиационному воздействию, а это тоже накладывает ограничения на ее производительность по сравнению с обычной «земной».
Связано это с тем, что частицы космических лучей, проходя сквозь полупроводник, оставляют за собой шлейф из свободных носителей заряда, провоцируя возникновение электрон-дырочных пар, способных переключить транзистор в неправильное состояние. Чем меньше транзистор, тем меньший заряд переключает его состояние, поэтому самые компактные и быстрые транзисторы в космосе надежно не работают.
Наконец, вспомним, что земные «беспилотники» на улицах все еще ездят либо с водителями-инженерами за рулем, либо с инженером на заднем сидении, страхующим автомобиль с помощью планшета и способным в любой момент остановить машину, если автопилот даст сбой.
По мнению Алексея Малахова, настоящий искусственный интеллект для беспилотного вождения планетоходов появится не раньше, чем подобные системы без каких бы то ни было ограничений приживутся на Земле. Слишком высоки ставки — транспортное средство стоимостью 2,5–3 миллиарда долларов необходимо оградить от малейшего риска попасть в ДТП.
Вечная батарейка
Ограниченные энергетические возможности марсохода диктуются тем, что он питается от РИТЭГ — радиоизотопного термоэлектрического генератора.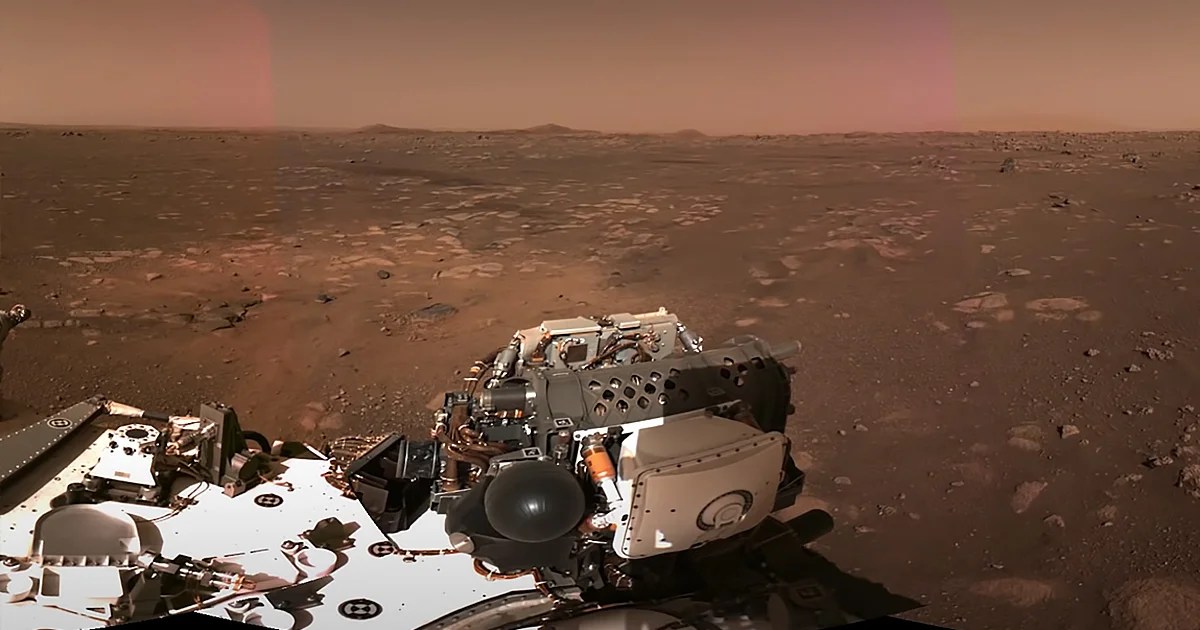 РИТЭГ состоит из 4,8 килограмма диоксида плутония-238, а кроме того — термопары и защитного кожуха. Общая масса РИТЭГ — 45 килограмм, но его мощность не превышает 110 ватт. Это значит, что для движения марсоходу желательно накапливать запас энергии. С этой целью он снабжен литиевыми батареями общей емкость 42 ампер-часа (сходные по емкости можно найти в электровелосипедах).
РИТЭГ состоит из 4,8 килограмма диоксида плутония-238, а кроме того — термопары и защитного кожуха. Общая масса РИТЭГ — 45 килограмм, но его мощность не превышает 110 ватт. Это значит, что для движения марсоходу желательно накапливать запас энергии. С этой целью он снабжен литиевыми батареями общей емкость 42 ампер-часа (сходные по емкости можно найти в электровелосипедах).
У операторов марсохода есть четкие критерии, ниже какого уровня они не имеют права опускать заряд батареи. И если они видят, что «Кьюриосити» приблизился к этому минимуму, то погружают аппарат в сон, чтобы он накопил энергии и смог ехать дальше.
Необходимость накапливать энергию перед движением, а также тот факт, что ночью на Марсе камеры нормально работать не могут, заставляют «Кьюриосити» примерно половину марсианского сола (марсианских суток) проводить во сне. Кроме того, спячка длиной в месяц неизбежна каждые два года, когда Марс находится по другую сторону от Солнца и связи с марсоходом нет.
Все же нельзя не отметить, что использование РИТЭГ, несмотря на все его ограничения по мощности, — настоящая революция для планетоходов. Еще «Оппортьюнити» и «Спирит» использовали солнечные батареи. Во время пылевых бурь на Марсе пиковая выработка энергии, выдаваемая фотоэлементами «Оппортьюнити» в полдень, падала с 800 до 128 ватт-часов, при этом в ночную половину суток они, разумеется, не работали.
Еще «Оппортьюнити» и «Спирит» использовали солнечные батареи. Во время пылевых бурь на Марсе пиковая выработка энергии, выдаваемая фотоэлементами «Оппортьюнити» в полдень, падала с 800 до 128 ватт-часов, при этом в ночную половину суток они, разумеется, не работали.
Из-за этого аппараты на долгие недели впадали в спячку в ожидании улучшения погодных условий. К тому же, застряв в песке и потеряв возможности оптимальным образом сориентироваться по Солнцу за счет разворота корпуса, «Спирит» в итоге истратил запас энергии и перестал выходить на связь.
Кроме того, солнечные батареи просто не смогли бы придать подвижность по-настоящему тяжелому «Кьюриосити», чей вес составляет 900 килограмм — впятеро больше прежних марсоходов. Да и питать заметную научную нагрузку от солнечных батарей на Марсе, где слишком мало солнечного света, не получится. Научные приборы «Кьюриосити» имеют массу в 75 килограмм, тогда как у его предшественников их вес не превышал пяти килограмм.
Наконец, фотоэлементы как источник энергии заметно повышают вероятность потери марсохода. Сильная песчаная буря может занести солнечные батареи планетохода пылью, и в результате даже после того, как буря закончится, они не смогут выдавать полную мощность. РИТЭГ это не грозит. Как говорит Алексей Малахов: «Эта батарейка надолго переживет все прочее в “Кьюриосити”, потому что марсоход начнет ломаться в других местах».
Сильная песчаная буря может занести солнечные батареи планетохода пылью, и в результате даже после того, как буря закончится, они не смогут выдавать полную мощность. РИТЭГ это не грозит. Как говорит Алексей Малахов: «Эта батарейка надолго переживет все прочее в “Кьюриосити”, потому что марсоход начнет ломаться в других местах».
Александр Березин
Сколько вездеходов на Марсе? [В этот самый момент времени]
Исследование Марса с помощью удаленных космических аппаратов началось еще в 1960-х годах. Сегодня Космическое агентство США НАСА продолжает поиски Красной планеты с помощью различных технологий. Роверы — это специальные устройства для исследования поверхности планет, которые используются. Но сколько их? Вот что вы хотите знать.
Итак, сколько вездеходов на Марсе? В настоящее время на Марсе находится шесть марсоходов, пять из которых принадлежат США, а один — Китаю. Имена пяти марсоходов Соединенных Штатов — Соджорнер, Спирит и Оппортьюнити, Любопытство, Настойчивость. Китайский марсоход Zhurong приземлился 15 мая 2021 года.0006
Китайский марсоход Zhurong приземлился 15 мая 2021 года.0006
Марс представляет большой научный интерес.
Четвертая планета от Солнца и вторая по величине планета Солнечной системы.
Таким образом, эта планета была удаленно исследована различными типами космических аппаратов.
И через различные зонды; были проанализированы наши знания о планете – ее геология и даже потенциал обитаемости.
Дайте нам знать, поближе познакомьтесь с марсоходами прямо сейчас, прежде чем подробно узнать, что они делают и что обнаружили!
Содержание
- 1 Сколько вездеходов сейчас на Марсе?
- 2 Что делают марсоходы?
- 3 Что такое программа исследования Марса?
- 4 MARS Missions
- 4.1 Active
- 4.2 больше не активно
- 4,3 EN-Route
- 4,4 запланировано
- 5 Наконец-то
Как многие Rovers на Марсе 6666 2
. По состоянию на апрель 2021 года в настоящее время существует 6 марсоходов, хотя известно, что только три из них находятся в рабочем состоянии. Среди активных марсоходов Curiosity, Perseverance и 9.0005 Zhurong (при этом Zhurong был последним марсоходом, приземлившимся 15 мая 2021 года.
Среди активных марсоходов Curiosity, Perseverance и 9.0005 Zhurong (при этом Zhurong был последним марсоходом, приземлившимся 15 мая 2021 года.
Хотя сейчас на Марсе находится шесть марсоходов; Spirit, Opportunity и Sojourner завершили свои миссии. С тех пор НАСА потеряло с ними связь.
И Журонг вошел в историю.
Астрономический телескоп
Включите JavaScript
Это первый китайский космический корабль, приземлившийся на планете!
Шестиколесный марсоход «Чжуронг» нацелился на Равнину Утопии, обширную местность в северном полушарии планеты.
Роверу потребовалось около 17 минут, чтобы полностью развернуться и отправить сигнал на Землю.
Что делают марсоходы?
Роверы — это небольшие автомобили, которые передвигаются по поверхности планеты.
Имеют колеса и предназначены для передвижения по разным районам; получение дополнительного интеллекта по сравнению с более стационарными спускаемыми аппаратами.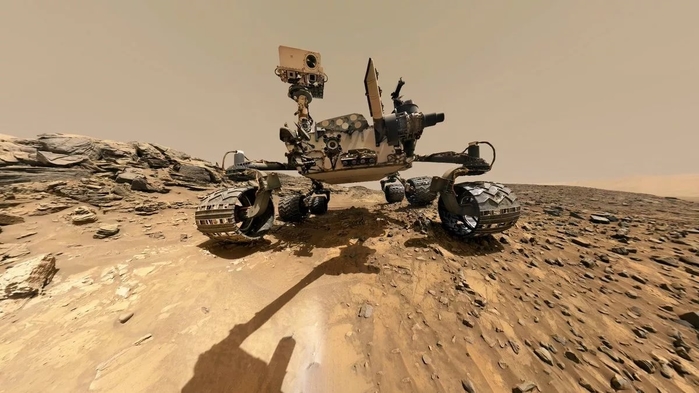
Роверы могут покрывать довольно большой участок земли и часто нести другое специализированное оборудование для отправки разведданных. Обычно это включало микрофоны и камеры.
Роверы помогают ученым анализировать поверхность планеты; включая камни и химические вещества, из которых они состоят.
Именно с помощью таких химических веществ ученые могут лучше понять окружающую среду и любые изменения в течение длительного периода времени.
Что такое программа исследования Марса?
Программа исследования Марса является основой использования вездеходов на Марсе. Это началось в 1994 году и продолжается по сей день.
Настройка NASA , цель программы:
«Цель программы исследования Марса состоит в том, чтобы исследовать Марс и обеспечить непрерывный поток научной информации и открытий с помощью тщательно отобранной серии автоматических орбитальных аппаратов, посадочных модулей и мобильных лабораторий, соединенных между собой высокоскоростной сетью связи Марс/Земля.
.
 .
.Кроме того, программа стремится помочь нам понять историю и то, как Марс формировался с течением времени, потенциал Марса для существования жизни (известный как его биологический потенциал), и как Марс сравнивается с Землей. .
До сих пор программа и использование технологий давали нам изображения поверхности и важные сведения, такие как планетарная температура и химический состав горных пород.
Mars Missions
Active
| Rover | Launched | Launched By | Landed | Notes |
| Curiosity | November 26, 2011 | NASA | August 6, 2012 | Still Operational As of April 2021 |
| Perseverance | July 30, 2020 | NASA | February 18, 2021 | It carries the Mars Helicopter Ingenuity |
| Zhurong | 23 июля 2020 года | CNSA | 15 мая 2021 года | Успешно достиг орбиты Марса 10 февраля 2021 года. 0116 0116 |
No Longer Active
| Rover | Launched | Launched By | Landed | Notes | ||||
| Mars 3, Prop- M Rover | 28 мая 1971 г. | Советский Союз | 2 декабря 1971 г. | Прекращение связи примерно через 104,5 секунды после приземления | ||||
| Sojourner | 4 декабря 1996 г. | НАСА | 4 июля 1997 г. | Связь была потеряна 27 сентября 1997 г. ), Mars Exploration Rover (MER) | 10 июня 2003 г. | НАСА | 4 января 2004 г. | В эксплуатации 6 лет. Spirit преодолел общее расстояние 7,73 км (4,80 мили), но колеса в конечном итоге застряли в песке. Последнее сообщение, полученное от марсохода, было 22 марта 2010 г., а НАСА прекратило попытки восстановить связь 25 мая 2011 г.  |
| Opportunity (MER-B) | 7 июля 2003 г. | НАСА | 25 января 2004 г. | Работает в течение 5498 земных дней с момента приземления до завершения миссии; 15 земных лет или 8 марсианских лет. Он преодолел 45,16 км (28,06 миль). Марсоход отправил свой последний статус 10 июня 2018 года, когда марсианская пыльная буря заблокировала солнечный свет, необходимый для перезарядки батареи. После сотен попыток повторной активации НАСА объявило миссию завершенной 13 февраля 2019 г. |
En-route
| Rover | Launched | Launched By | Landed | Notes |
| N/A | N/ A | Н/Д | Н/Д | Н/Д |
Запланировано
0003
Наконец
Марсоходы необходимы для программы исследования Марса.
Эти наземные транспортные средства значительно расширили наше понимание Красной планеты и будут продолжать делать это в будущем.
Curiosity и Perseverance активны, их изображения и недавние находки можно увидеть на веб-сайте NASA Mars.
Но с учетом того, что запланировано, предложено и разработано несколько марсоходов, многое еще впереди!
Крис Уильямсон
Привет, меня зовут Крис. Я страстный и опытный астроном, который ничего не любит больше, чем наблюдать за ночным небом. Я также люблю исследовать, изучать и писать обо всем, что касается Космоса и Вселенной. Я создал Astronomy Scope, чтобы делиться своими знаниями, опытом, предложениями и рекомендациями о том, чему я научился на этом пути, помогая всем получить удовольствие от этого хобби.
названий марсоходов и список шести марсоходов, которые путешествовали по Марсу
Марсоход Curiosity, приземлившийся на Марсе 5 августа 2012 года, сделал более 850 000 снимков марсианской поверхности. Тем временем китайский марсоход Zhurong, прибывший на Красную планету в мае 2021 года, ищет подземные водные карманы. OPPORTUNITY, еще один марсоход НАСА, активно исследовал Марс в течение 14 лет с 2004 по 2018 год и обнаружил железный метеорит — первый метеорит, обнаруженный на другой планете.
Тем временем китайский марсоход Zhurong, прибывший на Красную планету в мае 2021 года, ищет подземные водные карманы. OPPORTUNITY, еще один марсоход НАСА, активно исследовал Марс в течение 14 лет с 2004 по 2018 год и обнаружил железный метеорит — первый метеорит, обнаруженный на другой планете.
Вышеупомянутые факты — это взгляд на панораму открытий марсохода за десятилетия. Люди отправляли беспилотные транспортные средства на Марс еще в 19 веке.70-х годов и марсоходы 1997 года. Эти марсоходы, отправленные НАСА и другими космическими агентствами для исследования Марса, играют решающую роль в нашем понимании красной планеты.
Ровер — это дистанционно управляемое роботизированное моторизованное транспортное средство, предназначенное для перемещения по поверхности другой планеты (или другого небесного тела). 4 июля 1997 года марсоход Pathfinder Sojourner НАСА стал первым колесным роботом с Земли, приземлившимся на скалистой местности Марса. Шесть марсоходов успешно приземлились на Марсе; из них три аппарата (Curiosity and Perseverance НАСА и Zhurong Китая) все еще активны.
Космические агентства отправляют на Марс марсоходы, а не людей, потому что миссия с экипажем на Красной планете по-прежнему является дорогостоящим и рискованным предприятием. У нас нет технологии, гарантирующей, что астронавт-человек обязательно вернется живым с Марса. Конечно, ничего не гарантировано, но некоторые опасности для людей, связанные с исследованием Марса, не имеют простого ответа. К ним относятся последствия высоких уровней радиационного облучения и изменения силы тяжести, изоляция и заключение во время длительной поездки, необходимость обеспечения неотложной медицинской помощи или отказа оборудования, а также способы обеспечения достаточным количеством пищи.
Более того, роботизированные марсоходы могут проводить сотни дней и даже лет (марсоход Opportunity проработал более 14 лет). Кроме того, каждая космическая миссия с человеком на борту должна быть кругосветной, тогда как марсоходы не нужно возвращать на Землю. Таким образом, по сравнению с астронавтами-людьми, вездеходы позволяют космическим агентствам собирать больше данных с меньшими ресурсами, и это тоже без риска для чьей-либо жизни.
Таким образом, по сравнению с астронавтами-людьми, вездеходы позволяют космическим агентствам собирать больше данных с меньшими ресурсами, и это тоже без риска для чьей-либо жизни.
Вот обзор шести марсоходов, которые путешествовали по Марсу:
Марсоход Sojourner
Марсоход NASA Curiosity. Источник: NASA/Wikimedia Commons
Микромарсоход весил 23 фунта и был рассчитан всего на 30 сол (один сол = один марсианский день = 24 часа 39 минут 35 секунд) на Марсе, но ему удалось оставаться активным в течение 85 дней (83). соль). Sojourner приземлился в районе Ares Vallis на красной планете и преодолел расстояние около 100 метров. Ровер был построен Лабораторией реактивного движения НАСА (JPL) и был частью миссии агентства Pathfinder.
Самый популярный
Ученые НАСА решили посадить «Соджорнер» в долине Арес, потому что местность выглядела так, как будто ранее она была покрыта водой. Хотя марсоход не обнаружил никаких доказательств, подтверждающих наличие воды на Марсе, он позволил НАСА успешно протестировать и продемонстрировать «более быструю, качественную и дешевую» технологию исследования других планет в нашей Солнечной системе.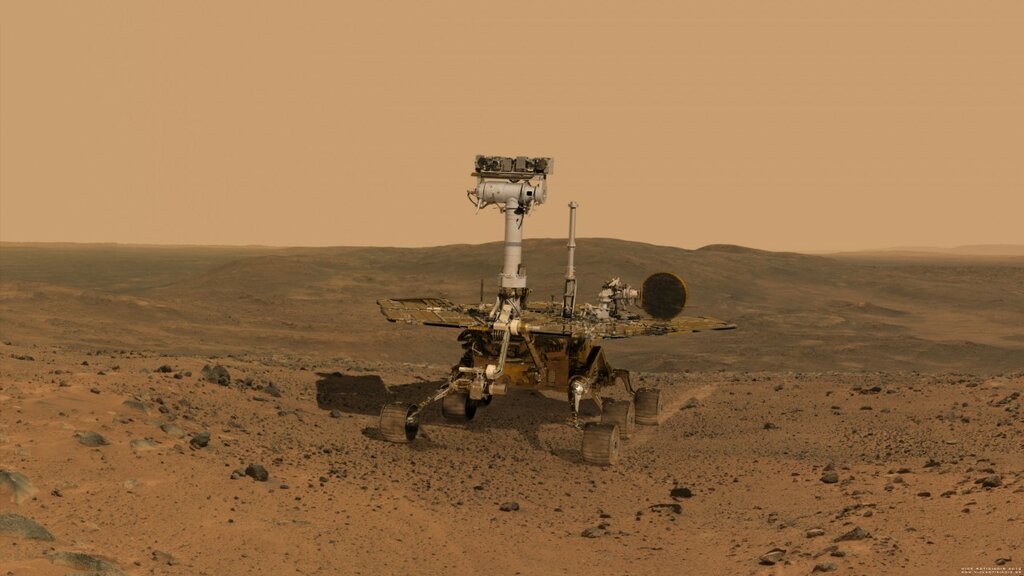
«Соджорнер» осуществил окончательную передачу данных 27 сентября 1997 г., но был активен до 7 октября. Он вернул 2,3 миллиарда битов информации, в том числе более 16 500 изображений с посадочного модуля и 550 изображений с марсохода, а также провел более 15 химических исследований. анализ горных пород и грунта.
Двойные марсоходы Opportunity и Spirit
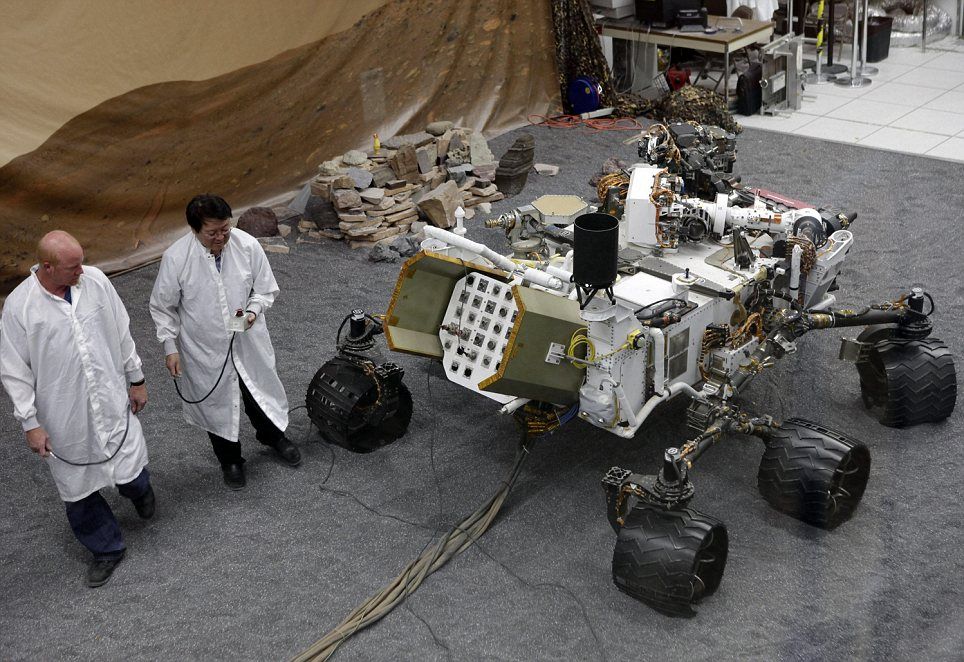
Эксперты тестируют марсоход Spirit в Космическом центре Кеннеди. Источник: NASA/Wikimedia Commons
Для поиска камней, которые могли бы намекнуть на какую-либо историческую деятельность, связанную с водой на Марсе, в 2003 году НАСА запустило программу Mars Exploration Rover (MER). MER-2) и Opportunity (MER-1), которые приземлились в следующем году 4 и 24 января соответственно. Оба марсохода были предназначены для исследования планеты всего за 90 солов, но Spirit проработал шесть земных лет, а Opportunity путешествовал по Марсу за 5110 солов.
До того, как в апреле 2009 года Spirit попал в ловушку в куче марсианского песка, он преодолел 7,7 км от кратера Гусева, где он приземлился. Марсоход не только прислал впечатляющие изображения ландшафта красной планеты, но и стал первым роботом, отшлифовавшим марсианскую поверхность с помощью инструмента для истирания камней (RAT).
Марсоход не только прислал впечатляющие изображения ландшафта красной планеты, но и стал первым роботом, отшлифовавшим марсианскую поверхность с помощью инструмента для истирания камней (RAT).
Собранные данные также показали присутствие богатых кремнеземом частиц почвы под поверхностью Марса, и эти уникальные частицы пыли позволяют предположить , что в прошлом марсианская почва могла быть богатой водой.
Марсоход Opportunity на Марсе. Источник: NASA/Wikimedia Commons
НАСА перестало получать сигналы от Spirit после 22 марта 2010 года. Тем временем марсоход Opportunity, приземлившийся на плато Меридиана внутри кратера Орла, продолжал свою работу. Он обнаружил «чернику», гальку из гематита, обычно встречающуюся в регионах, где почва контактирует с кислой водой.
Марсоход Opportunity также впервые обнаружил осадочные породы за пределами Земли, и до того, как НАСА потеряло связь 10 июня 2018 года, марсоход преодолел рекордное расстояние в 45,16 км (28,06 мили). Ни одно созданное человеком наземное транспортное средство, кроме Opportunity, не преодолевало такое расстояние на другой планете.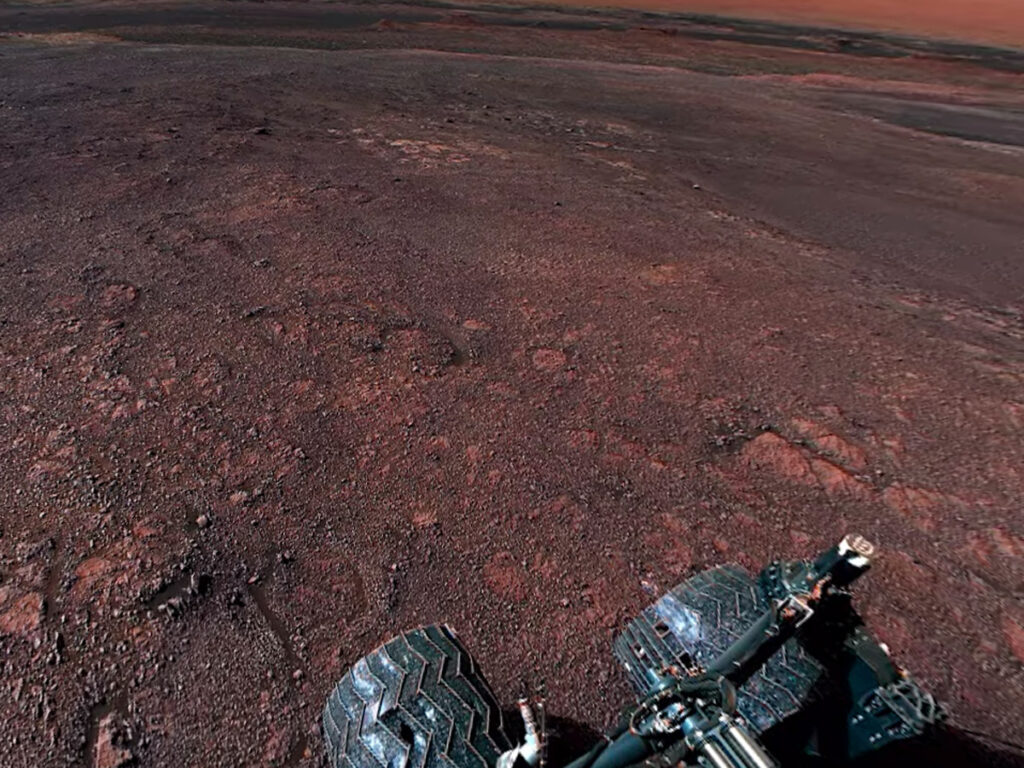
Пыльная буря, которая привела к потере связи Opportunity, не была обычной бурей. Шторм длился более четырех месяцев (с мая по сентябрь 2018 года) и привел к скорости ветра до 97 км/ч (60 миль в час). Это был самый сильный марсианский шторм НАСА с тех пор, как агентство времени начало наблюдать за красной планетой.
Буря не позволила солнечным лучам достичь солнечных панелей Opportunity. Последнее сообщение, полученное от марсохода Opportunity, было перефразировано руководителем проекта миссии Джоном Каллисом так: «У меня разряжена батарея, и уже темнеет».
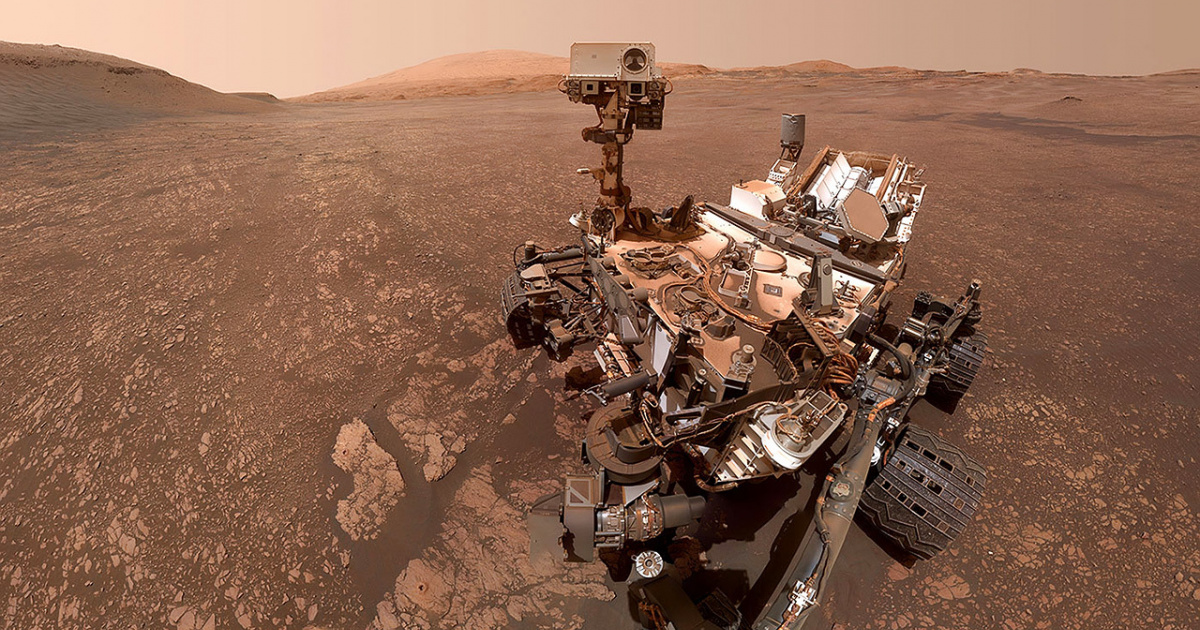
Марсоход Curiosity
Марсоход Curiosity сделал селфи. NASA
Марсоход исследует Марс с 6 августа 2012 года. Он является частью миссии НАСА «Марсианская научная лаборатория» (MSL) и до сих пор является самым большим из когда-либо построенных марсоходов. Ровер имеет длину 10 футов (три метра), высоту семь футов (2,2 метра) и ширину 2,7 метра (девять футов), поэтому в основном он имеет размеры, аналогичные внедорожнику. По данным НАСА, Curiosity все еще активен и преодолел более 16,8 миль (27,04 км). Ровер может двигаться со скоростью до 100 футов в час, но не всегда находится в движении.
По данным НАСА, Curiosity все еще активен и преодолел более 16,8 миль (27,04 км). Ровер может двигаться со скоростью до 100 футов в час, но не всегда находится в движении.
Миссия MSL была запущена для изучения окружающей среды Марса и определения того, были ли когда-то на планете подходящие условия для поддержания микробной жизни. Интересно, что в отличие от своих предшественников, у марсохода Curiosity нет солнечных батарей; вместо этого он оснащен радиоизотопной энергетической системой, которая «вырабатывает электричество за счет тепла радиоактивного распада плутония». Ровер также известен тем, что делает красивые селфи во время своей работы.
Curiosity сделал несколько выдающихся открытий на Марсе; марсоход пробурил аргиллит под названием «Овечье ложе», что намекало на присутствие элементов жизнеобеспечения (таких как углерод, азот, фосфор и т. д.) в древней марсианской среде. Инструмент SAM (Sample Analyzing at Mars) Curiosity обнаружил газообразный метан в атмосфере красной планеты, что может указывать либо на жизнь, либо на содержание воды в почве.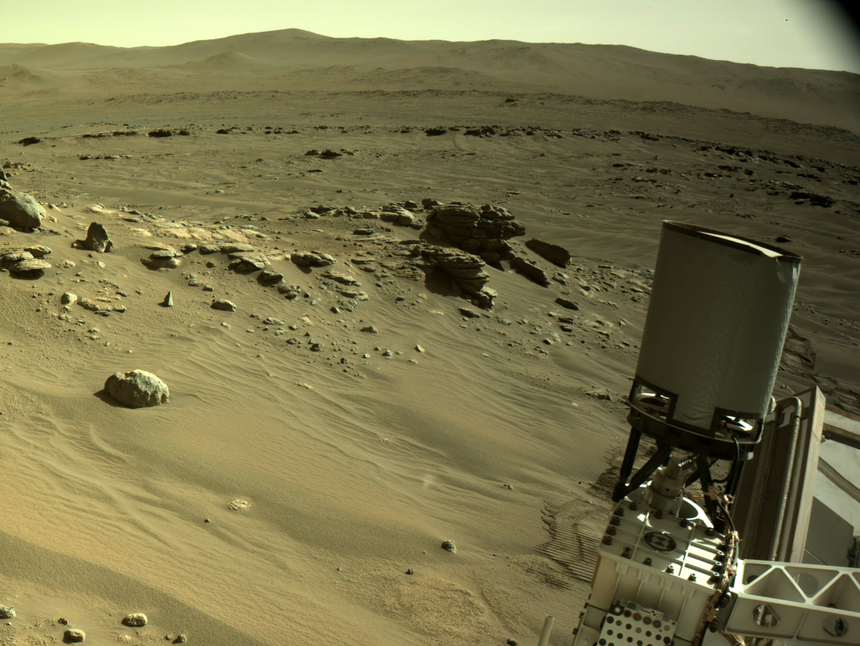
Настойчивость, также известная как Перси
Полномасштабная модель марсохода Настойчивость. Источник: NASA/JPL-Caltech/Wikimedia Commons
18 февраля 2021 года в рамках программы исследования Марса на Марс прибыл новый марсоход Perseverance и роботизированный вертолет Ingenuity. Один только марсоход весит 2260 фунтов (1025 кг). Марсоход оснащен самыми современными инструментами для исследования, позволяющими фиксировать микроскопические детали, скрытые в марсианской породе, и искать доказательства прошлой микробной жизни. SHERLOC (сканирование обитаемых сред с помощью комбинационного рассеяния и люминесценции для органических и химических веществ) и WATSON (широкоугольный топографический датчик для эксплуатации и проектирования).
Perseverance будет искать признаки прошлой микробной жизни на Марсе, а также будет собирать и хранить образцы горных пород с планеты (также называемые обработкой образцов), чтобы НАСА могло доставить эти образцы на Землю в будущем (как часть Кампания агентства по возврату образцов с Марса). Марсоход приземлился в кратере Джезеро, который был выбран потому, что ученые считают, что этот район когда-то был затоплен водой, что делало его подходящим местом для жизни микробов, возможно, около четырех миллиардов лет назад.
Марсоход приземлился в кратере Джезеро, который был выбран потому, что ученые считают, что этот район когда-то был затоплен водой, что делало его подходящим местом для жизни микробов, возможно, около четырех миллиардов лет назад.
По словам Кена Фарли, ученого проекта программы исследования Марса, «в конечном итоге мы выбрали кратер Джезеро, потому что это многообещающее место для обнаружения органических молекул и других потенциальных признаков микробной жизни».
По состоянию на 29 января 2021 года Перси пробыл на поверхности Марса 338 сол и отправил тысячи изображений красной планеты. Из-за сложности, связанной с последовательностью входа и спуска марсохода Perseverance на Марс, его приземление было названо диспетчерами «семью минутами ужаса».
Также есть надежда, что миссия предоставит возможность собрать информацию, которая поможет решить проблемы будущих экспедиций людей на Марс.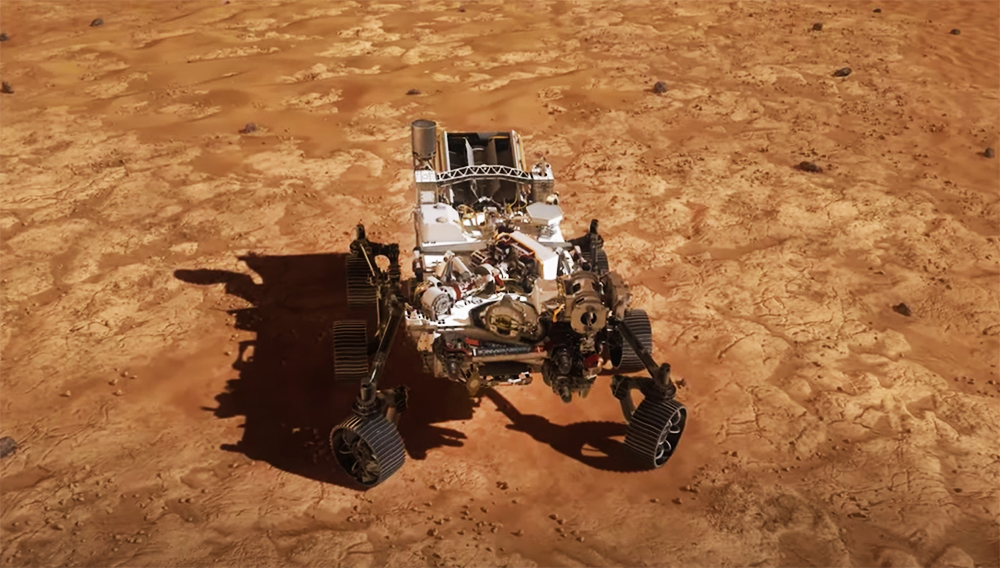 Это будет включать в себя тестирование метода производства кислорода из марсианской атмосферы, улучшение методов посадки, поиск других ресурсов и мониторинг погоды, пыли и других условий, влияющих на будущих астронавтов на Марсе.
Это будет включать в себя тестирование метода производства кислорода из марсианской атмосферы, улучшение методов посадки, поиск других ресурсов и мониторинг погоды, пыли и других условий, влияющих на будущих астронавтов на Марсе.
Ровер Zhurong
Модель, демонстрирующая посадочный модуль Tianwen-1 и вездеход Zhurong. Источник: Sprt98/Wikimedia Commons
Китайский автоматический космический корабль Tianwen-1 доставил марсоход Zhurong на Марс. Посадочный модуль с космическим кораблем прибыл на красную планету 14 мая 2021 года. После США марсоход благополучно приземлился в районе Утопии на Марсе, что сделало Китай лишь второй страной, которая успешно приземлилась и управляла роботизированным транспортным средством на Марсе. Ровер был разработан Китайским национальным космическим управлением (CNSA) и начал свою работу на Марсе 22 мая, через неделю после приземления.
Zhurong оснащен солнечными панелями, георадарной системой (GPR), магнитометром, мультиспектральной камерой, детектором наземных соединений (MarSCoDe), навигационными камерами и камерами местности (NaTeCam), способными делать панорамные изображения, и передовыми метеорологическими инструменты, в том числе магнитометр для измерения магнитного поля планеты. Миссия марсохода поможет составить полную геологическую картину планеты. Он будет изучать марсианскую топографию и геологию, структуру почвы, химический состав, типы минералов и горных пород, а также искать доказательства присутствия водяного льда.
Миссия марсохода поможет составить полную геологическую картину планеты. Он будет изучать марсианскую топографию и геологию, структуру почвы, химический состав, типы минералов и горных пород, а также искать доказательства присутствия водяного льда.
Китайский марсоход (первоначально рассчитанный на 90 дней) все еще активно исследует Марс вместе с НАСА Curiosity and Perseverance. По состоянию на 1 января 2022 года марсоход преодолел расстояние около 0,87 мили (1,4 км) по поверхности Марса. С середины сентября до начала ноября 2021 года Zhurong приостановил свою работу на 50 дней, чтобы избежать нарушения связи, которое могло быть вызвано усилением электромагнитного излучения Солнца.
Европейское космическое агентство (ЕКА) и российский Роскосмос планируют запустить марсоход ExoMars в этом году, в какой-то момент в окне запуска с 20 сентября по 1 октября 2022 года, с датой посадки в июне 2023 года. запуск в 2020 году, но запуск был отложен по техническим причинам и из-за вспышки коронавируса.
Марсоходы по-прежнему остаются самыми безопасными и дешевыми технологиями для исследования красной планеты. Поэтому весьма вероятно, что в ближайшие годы будет запущено больше таких роботизированных транспортных средств.
For You
Культура
Этим летом наблюдался всплеск путешественников и их потерянного или неправильно доставленного багажа. Сможет ли ИИ спасти нарастающий багажный кризис?
Дина Тереза | 28.07.2022
инновацииУмные дороги, беспроводная зарядка электромобилей и будущее американской инфраструктуры
Эрик Джеймс Бейер| 09.08.2022
инновацииВ новой книге рассказывается, как Маск, Безос и Китай переписывают правила освоения космоса
Крис Янг| 11.10.2022
Еще новости
культура
Илон Маск повторно нанимает Лигму и Джонсона, которые никогда там не работали
Стивен Вичинанца| 15.