Содержание
Магнитный двигатель
Эта статья нужны дополнительные цитаты для проверка. Пожалуйста помоги улучшить эту статью от добавление цитат в надежные источники. Материал, не полученный от источника, может быть оспорен и удален |
А магнитный двигатель или магнитный двигатель это тип вечный двигатель, который предназначен для создания вращение посредством постоянные магниты в статор и ротор без внешнего источника энергии. Такой мотор теоретически и практически неосуществимо.[1][2] Идею функционирования магнитных двигателей продвигали различные любители. Его можно рассматривать как паранаука. Часто встречаются ссылки на свободная энергия а иногда даже ссылки на эзотеризм. [3]
[3]
Магнитные двигатели не следует путать с обычно используемыми двигатели с постоянными магнитами, которые питаются от внешнего источника электроэнергии.
Принцип работы
Пример конструкции магнитного двигателя. Преимущественно притягивающая ориентация магнитов, по-видимому, приводит к вечному вращательному движению.
Гипотетический магнитный двигатель работает с постоянным магниты в статоре и роторе. За счет особого расположения притягивающих и отталкивающих полюсов предполагается, что вращательное движение ротора постоянно поддерживается. Практические реализации терпят неудачу, потому что в магнитах нет существенной энергии, которую можно было бы использовать для движения или компенсации потерь энергии. В сила между постоянными магнитами является консервативный поскольку магнитное поле следует за потенциал, так что нет работай выполняется по замкнутому циклу. Через короткое время такой двигатель перестанет двигаться и займет положение равновесия.[1][3]
Рационализации сторонников относительно природы источника энергии различаются. Некоторые спорят только о магнитной силе, оставляя вопросы сохранение энергии в стороне. Некоторые утверждают, что постоянные магниты содержат магнитная энергия, который будет потребляться двигателем. Такая существующая энергия ограничена энергией, затрачиваемой на производство магнита, которая довольно мала. Кроме того, это привело бы к быстрому снижению намагниченности со временем, чего не наблюдается. Другие рационализации включают ссылки на так называемые свободная энергия и энергия нулевой точки, не объясняя, как эти энергии высвобождаются. Другие утверждают, что их двигатели могут преобразовывать тепловую энергию окружающей среды в механическое движение (вечный двигатель второго рода ).
Некоторые спорят только о магнитной силе, оставляя вопросы сохранение энергии в стороне. Некоторые утверждают, что постоянные магниты содержат магнитная энергия, который будет потребляться двигателем. Такая существующая энергия ограничена энергией, затрачиваемой на производство магнита, которая довольно мала. Кроме того, это привело бы к быстрому снижению намагниченности со временем, чего не наблюдается. Другие рационализации включают ссылки на так называемые свободная энергия и энергия нулевой точки, не объясняя, как эти энергии высвобождаются. Другие утверждают, что их двигатели могут преобразовывать тепловую энергию окружающей среды в механическое движение (вечный двигатель второго рода ).
История
Смотрите также: История вечных двигателей
Первые идеи магнитного двигателя относятся к Петрус Перегринус де Марикур с 1269 г.[4][5] Популярный пример магнитного двигателя, хотя и без оси вращения, был предложен Джон Уилкинс в 1670 году: пандус с магнитом наверху, который тянул металлический шар вверх по пандусу. Рядом с магнитом было небольшое отверстие, которое должно было позволить мячу упасть под рампу и вернуться на дно, а заслонка позволила ему снова вернуться наверх. Полная теория электромагнетизм была сформулирована Джеймсом Клерком Максвеллом только в 1865 году и считается действительной до сих пор.
Рядом с магнитом было небольшое отверстие, которое должно было позволить мячу упасть под рампу и вернуться на дно, а заслонка позволила ему снова вернуться наверх. Полная теория электромагнетизм была сформулирована Джеймсом Клерком Максвеллом только в 1865 году и считается действительной до сих пор.
Патентный эскиз магнитного двигателя Говарда Джонсона
С середины 20 века ряд изобретателей заявляли о создании различных магнитных двигателей. В 1954 году немецкий инженер-механик Фридрих Люлинг утверждал, что создал двигатель, который на постоянных магнитах мог работать от 10 до 20 лет без перебоев. 8 февраля 1966 г. УФА -Wochenschau сообщил об изобретении.[6] Американский инженер Говард Джонсон подал Патент США 4,151,431 на двигатель с постоянным магнитом в 1973 году, который был предоставлен в 1979 году. Опытный образец его мотора был представлен в 1980 году в научно-популярном Журнал «Наука и механика».[7] Другие магнитные двигатели были разработаны японским артистом Кохеи Минато,[8] подавшие заявки на патенты в 1988, 1997 и 2005 годах.
В Европейское патентное ведомство не признала патентную заявку на магнитный двигатель. Начиная с 2006 года, «изобретатель» Майк Брэди и его компания Perendev-Group продавали такой двигатель и в 2010 году были обвинены в серьезном мошенничестве.[9] и приговорен к 5 годам и 9 месяцам лишения свободы.[10]
В паранаучных кругах магнитный двигатель все еще популярен, и руководства по сборке все еще распространяются, несмотря на отсутствие доказательств функционирования.[1] В начале 21 века идея магнитного двигателя все больше распространялась в Интернете, и на онлайн-платформах для обмена видео появилось несколько фальшивых видеороликов, показывающих, как работают магнитные двигатели.[11] Отвечая на вопрос, почему магнитный двигатель до сих пор не принят в отрасли, несмотря на его предположительно большой потенциал, теории заговора выдвигаются: Магнитные двигатели будут давать бесплатную энергию для всех, вредят существующим энергетика, и, таким образом, будет подавлен. Например, «Креативное мышление» на YouTube показывает несколько поддельных магнитных двигателей, некоторые из которых легко распознать как приводимые извне.
Например, «Креативное мышление» на YouTube показывает несколько поддельных магнитных двигателей, некоторые из которых легко распознать как приводимые извне.
мендосинский двигатель и теорема Ирншоу / Хабр
На днях я увидел на просторах интернета крайне любопытную вещь: мендосинский двигатель. Ротор на подшипниках крайне низкого трения: оригинальный имел стеклянный цилиндр, подвешенный на двух иголках, современные имеют магнитный подвес оси. Двигатель бесколлекторный, на роторе подвешены солнечные батареи, которые выдают напряжение на катушки, намотанные на роторе. Ротор проворачивается в фиксированном магнитном поле статора, солнечная батарея уходит от направленного света, на её место приходит другая. Крайне элегантное решение, которое вполне под силу сделать дома каждому.
Вот на этом видео крайне подробно описан (на русском языке) принцип работы:
Но ещё больше самого двигателя мне показалась любопытной следующая вещь. В описании этого видео Дмитрий Коржевский написал следующую вещь: «Боковую опору заменить магнитом НЕВОЗМОЖНО!!! Не задавайте больше этот вопрос!»
В описании этого видео Дмитрий Коржевский написал следующую вещь: «Боковую опору заменить магнитом НЕВОЗМОЖНО!!! Не задавайте больше этот вопрос!»
Отмазка: я ни разу не физик, могу сильно ошибаться, поправки приветствуются.
О, это интересно. Давайте ещё раз посмотрим, как работает магнитный подвес ротора. Если мы поставим два магнита, то изолиния потенциала выглядит следующим образом в зависимости от расстояния между двумя магнитами:
То есть, мы ставим два фиксированных магнита на статоре. Магнит на оси ротора не захочет сдвинуться вбок, т.к. изолиния потенциала имеет некий локальный минимум. Он захочет выскочить вдоль оси ротора. Делаем две таких системы, получаем ось ротора, которая зафиксирована магнитным полем в радиальном направлении, но при этом нестабильна в продольном. Упираем ось в стеклянную стеночку и вуаля, получили подшипник слабого трения.
Но стеклянная стеночка — это как-то… неэлегантно, что ли? Вполне логично желание получить полностью парящий в воздухе ротор, безо всяких костылей. И явно Дмитрия затюкали этим вопросом, да так, что он был вынужден написать невозможность подобного прямо в описании видео. И ведь Дмитрий Коржевский не один такой.
И явно Дмитрия затюкали этим вопросом, да так, что он был вынужден написать невозможность подобного прямо в описании видео. И ведь Дмитрий Коржевский не один такой.
Давайте посмотрим сюда, цитирую:
What would happen if the base magnets were spaced and oriented like in this drawing? Would it give it stability in the axial plane, and do away with the mirror requirement?
Или сюда, цитирую:
On a Mendocino Motor why does one side float free while the other has a tip to a wall? I know the question might sound trivial but I have worked up the idea why not use the same magnets used to levitate as a counter force on both sides of the shaft? I attached a very rough jpg of what I mean. the green magnets at the end of the shafts is what im referring to. is there some theory or law preventing this?
То есть, люди по всему миру хотят избавиться от механической поддержки оси. Я в школе учился плохо и мне невозможность создания полностью магнитного подвеса без костылей тоже ни разу не очевидна. При случае я за чашкой чая задал своему начальнику, учёному с мировым именем (не физику, прикладному математику), этот вопрос: «А почему, собственно невозможно?» И знаете, ему это тоже не было очевидно!
При случае я за чашкой чая задал своему начальнику, учёному с мировым именем (не физику, прикладному математику), этот вопрос: «А почему, собственно невозможно?» И знаете, ему это тоже не было очевидно!
На вышеозначенных форумах никто толком не объяснил, почему это невозможно. В лучшем случае цитировали какую-то теорему Ирншоу, которая не слишком-то удобоварима. Итак, она гласит следующее: «Всякая равновесная конфигурация точечных зарядов неустойчива, если на них кроме кулоновских сил притяжения и отталкивания ничто не действует.» Вам ясно? Мне нет. Положим, я могу смириться с тем, что мы говорим про заряженные частицы, а не про магниты. Но дальше?
Когда мне что-то неясно, я рисую картинку. Для простоты она будет в двумерном пространстве. Давайте представим четыре закреплённых единичных заряда по углам квадрата и свободный заряд в центре квадрата. Примерно так:
Неужели свободный заряд не находится в состоянии устойчивого равновесиия? Ведь куда бы он ни двинулся, он приближается к одному из фиксированных зарядов, увеличивая силу отталкивания! Давайте попробуем нарисовать карту потенциальной энергии свободного заряда. Я в школе учился плохо, физику прогуливал, поэтому будем черпать знания из википедии. Итак, если мы имеем в пространстве только один закреплённый заряд, то он создаёт во всём пространстве электростатический потенциал.
Я в школе учился плохо, физику прогуливал, поэтому будем черпать знания из википедии. Итак, если мы имеем в пространстве только один закреплённый заряд, то он создаёт во всём пространстве электростатический потенциал.
Формула электростатического потенциала (кулоновского потенциала) точечного заряда в вакууме:
Во всех умозрительных опытах все коэффициенты у меня равны либо нулю, либо единице. Поэтому заряд q единичный, неясный k тоже единица. То есть, один закреплённый заряд создаёт потенциал, измеряемый по формуле 1/r, где r — это расстояние до заряда.
Потенциальная энергия свободного единичного заряда в поле нашего закреплённого заряда также равна 1/r. (Вообще говоря, энергия равна k*q1*q2/r, но коэффициенты выбираем так, чтобы было удобно считать). Для нескольких зарядов все потенциалы просто складываются.
Давайте рисовать карту потенциальной энергии нашего свободного заряда, я это делаю при помощи sage:
var('x,y')
def unit_potential(a,b,x,y): return 1/(sqrt((x-a)^2 + (y-b)^2))
def system_potential(x,y): return unit_potential(1,1,x,y)+unit_potential(-1,1,x,y)+unit_potential(1,-1,x,y)+unit_potential(-1,-1,x,y)
contour_plot(system_potential(x,y), (x, -2, 2), (y, -2, 2), cmap='hsv', contours=30, region=5-system_potential(x,y), figsize=12, colorbar=True)
Вот карта, я выколол точки, где потенциальная энергия уходит в бесконечность:
По центру квадрата чётко виден локальный минимум энергии.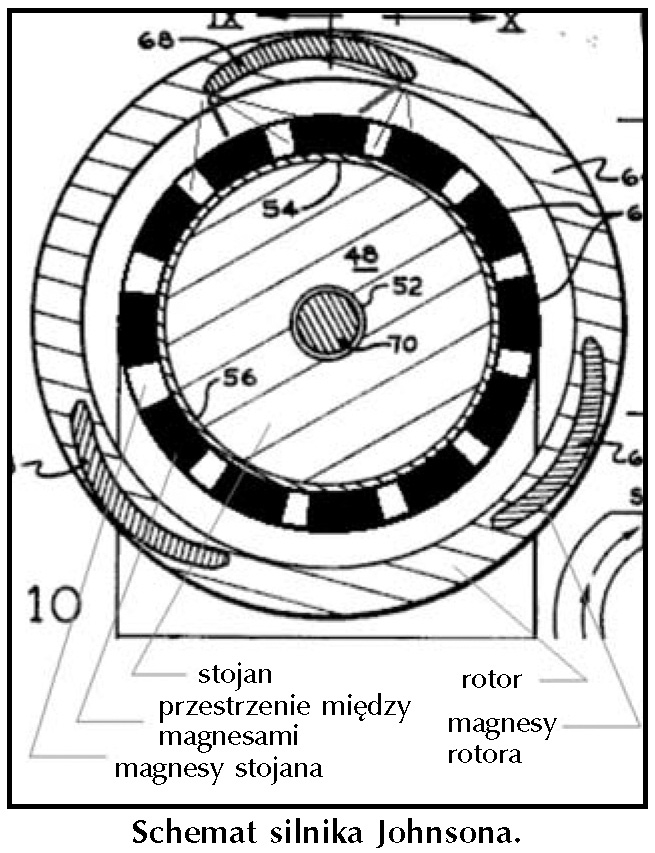 2))
2))
def system_potential(x,y): return unit_potential(1,1,x,y)+unit_potential(-1,1,x,y)+unit_potential(1,-1,x,y)+unit_potential(-1,-1,x,y)
contour_plot(system_potential(x,y), (x, -2, 2), (y, -2, 2), cmap=’hsv’, contours=30, region=5-system_potential(x,y), figsize=12, colorbar=True)
Вот картинка с картой потенциальной энергии:
Обратите внимание, что локальных минимумов на карте нет. Центр квадрата — седловая точка, то есть, точка неустойчивого равновесия. Как только свободный заряд сдвинется хоть на микрон от центра квадрата, он обязательно скатится и вылетит из квадрата, ускоряясь и ускоряясь.
Когда я получил явное противоречие с теоремой Ирншоу, я понял, что где-то прокололся и стал искать ошибку. Ошибку искать лучше всего последовательно с самого начала. Я тяжко вздохнул и пошёл читать, что такое уравнения Максвелла. В школе я учился не то, что бы очень плохо, оценки у меня были отличными. Только знаний вынес явно не по всем предметам. Например, уравнения Максвелла мне разве что в кошмарах снились после школы, а в университете и далее с ними сталкиваться просто не приходилось.
А оказалось, что там всё крайне просто, особенно если мы интересуемся только электростатикой! Уравнений Максвелла четыре по количеству следующих законов:
1. Закон Гаусса, он нам пригодится. Пока оставим всякие дивергенции, «на пальцах» это просто закон сохранения: энергия из ниоткуда не берётся и в никуда не уходит.
2. Закон Гаусса для магнитного поля — те же яйца, вид сбоку. Да и магнитным полем я пока не интересуюсь, т.к. разговор идёт от заряженных частицах, пропускаем.
3. Закон Фарадея: если мы двигаем магнитами, то они порождают электрическое поле, это интересно, подробнее поглядим потом.
4. Закон Ампера: если мы двигаем электрическим полем, то порождаем магнитное. На фиг, неинтересно.
Итак, эти четыре закона связывают между собой два векторных поля E и B, электрическое поле и магнитное. Эти векторные поля — это функции, которые имеют четыре аргумента (x,y,z,t), и каждой четвёрке аргументов сопоставляют один трёхмерный вектор. Магнитное нам не очень интересно в данном случае, рассмотрим поле E(x,y,z,t). Причём не забываем, что мы интересуемся электростатикой, поэтому E постоянно во времени. Очень удобно рассматривать это векторное поле как некоторую реку, где каждой в каждой точке реки мы говорим, куда и с какой скоростью течёт вода.
Причём не забываем, что мы интересуемся электростатикой, поэтому E постоянно во времени. Очень удобно рассматривать это векторное поле как некоторую реку, где каждой в каждой точке реки мы говорим, куда и с какой скоростью течёт вода.
Закон Фарадея говорит о том, что в случае постоянное во времени поле E (мы же говорим про электростатику) не имеет вихрей.
Как связан электростатический потенциал с электрическим полем? Очень просто: если поле E безвихревое (наш случай), то возможно создать такой ландшафт u, что покрыв его метровым слоем воды (на всех высотах!) и «отпустив» эту воду, скорость и направление течения воды породит поле E. Если умными словами, то можно найти такую скалярную функцию u, что её градиент равен полю E.
Закон Гаусса говорит следующее: возьмём маленькую область пространства. Если мы в неё не поместили заряда специально, то количество
«воды», которое затекает в эту область, равно количеству, которое вытекает. Если хочется выпендриться, то можно сказать, что дивергенция поля E равна нулю.
Напоминаю, что поле E — это производная скалярной функции u. Если её дивергенция равна нулю, то это означает, что лапласиан функции u равен нулю. Лапласиан — это умное слово для обозначения «кривизны» функции. В случае функции одной переменной лапласиан — это просто вторая производная. Вторая производная равна нулю только у постоянной или линейной функции (логично, кривизна равна нулю). В случае функции двух переменных лапласиан — это сумма двух частных производных. Если он равен нулю, то кривизна в одном направлении обязана быть аннулирована кривизной в другом направлении. То есть, чипсы разрешены:
А вот локальных минимумов (максимумов тоже) функция с нулевым лапласианом не имеет. То есть, чипсы разрешены, а холмы нет:
Представьте, что мы обмакнём проволочное колечко (хорошо изогнутое) в мыльную воду. Тогда мыльная плёнка образует поверхность с нулевым лапласианом:
Это будет так называемая минимальная поверхность. Мыльная плёнка старается уменьшить свою площадь. Логично, что если бы на ней был некий локальный максимум, то сгладив его, мы получили бы плёнку меньшей площади. Поэтому их и нет. Итак, электростатический потенциал — это своего рода минимальная поверхность, локальных максимумов (в местах, куда мы специально заряд не помещали) не имеет.
Логично, что если бы на ней был некий локальный максимум, то сгладив его, мы получили бы плёнку меньшей площади. Поэтому их и нет. Итак, электростатический потенциал — это своего рода минимальная поверхность, локальных максимумов (в местах, куда мы специально заряд не помещали) не имеет.
Функция 1/r имеет нулевой лапласиан в трёхмерном пространстве, а вот в двумерном нет! Если мы хотим рисовать двумерные примеры, то нам нужно решить задачу Дирихле, я о ней уже говорил в одной из своих предыдущих статей. Для 2D это будет функция -ln r.
Update: хороший комментарий chersanya, проясняющий суть магии.
Итак, возвращаясь к нашему примеру с одной свободной заряженной частицей. Потенциал электростатического поля не имеет локальных минимумов, и, как следствие, потенциальная энергия одной частицы локальных минимумов не имеет. Поэтому одна частица не может находиться в состоянии устойчивого равновесия в постоянном поле. Поздравляю вас, мы только что доказали теорему Ирншоу. 2))
2))
def system_potential(x,y): return unit_potential(0,1,x,y)+unit_potential(0,-1,x,y)
def energy(x,y): return system_potential(x+2,y)+system_potential(x-2,y)
contour_plot(energy(x,y), (x, -3, 3), (y, -2, 2), cmap=’hsv’, contours=30, figsize=12, colorbar=True)
Итак, энергия палки имеет четыре пика (каждый из двух концов палки попадает на каждый из двух зарядов). Как и предполагалось, палка не захочет двигаться по горизонтали. Она убежит по вертикали!
Это логично, ведь из чего мы получили энергию? Мы сложили потенциальные энергии каждого заряда. Мы знаем, что потенциальная энергия каждого заряда — это функция с нулевым лапласианом. Их сумма тоже будет иметь нулевой лапласиан. То есть, потенциальная энергия любого (не только нашей палки!) заряженного тела не может иметь минимумов в постоянном электрическом поле!
Ментальное изображение магнитных и электрических полей у людей, плотно не работавших с физикой, обманчиво. Мозг нас обманывает, рисуя картины минимумов энергии. К сожалению, это не так, и действительно создать мендосинский двигатель без опоры представляется затруднительным.
К сожалению, это не так, и действительно создать мендосинский двигатель без опоры представляется затруднительным.
Какие могут быть лазейки? Теорема Ирншоу (если мы сделаем усилие и вообще применим её к магнитам) применима только системам неподвижных постоянных магнитов.
1. Мы можем попытаться создать динамическое магнитное поле
2. Диамагнетизм и всякие сверхпроводники также не входят в рамки теоремы Ирншоу
3. Подвижные вообще и вращающиеся в частности тела также не рассмотрены, наиболее известный пример левитрон
Так что, не всё ещё потеряно. Да, использование любой из этих вещей убьёт начисто лаконичность мендосинского двигателя, но магия свободно парящих в воздухе вещей перекроет всё!
Именно теорема Ирншоу показала невозможность существования твёрдой материи, таким образом отвергнув существовавшую модель строения атома. В итоге была построена планетарная модель атома.
Вечный двигатель на постоянных магнитах. Миф или реальность?
Что такое магнитный двигатель
В научном мире вечные двигатели разделяют на две группы: первого и второго вида. И если с первыми относительно всё ясно — это скорее элемент фантастических произведений, то второй очень даже реален. Начнём с того, что двигатель первого вида — это своего рода утопичная штука, способная извлекать энергию из ничего. А вот второй тип основан на вполне реальных вещах. Это попытка извлечения и использования энергии всего, что нас окружает: солнце, вода, ветер и, безусловно, магнитное поле.
И если с первыми относительно всё ясно — это скорее элемент фантастических произведений, то второй очень даже реален. Начнём с того, что двигатель первого вида — это своего рода утопичная штука, способная извлекать энергию из ничего. А вот второй тип основан на вполне реальных вещах. Это попытка извлечения и использования энергии всего, что нас окружает: солнце, вода, ветер и, безусловно, магнитное поле.
Многие учёные разных стран и в разные эпохи пытались не только объяснить возможности магнитных полей, но и реализовать некое подобие вечного двигателя, работающего за счёт этих самых полей. Интересно то, что многие из них добились вполне впечатляющих результатов в этой области. Такие имена, как Никола Тесла, Василий Шкондин, Николай Лазарев хорошо известны не только в узком кругу специалистов и приверженцев создания вечного двигателя.
Особый интерес для них составляли постоянные магниты, способные возобновлять энергию из мирового эфира. Безусловно, доказать что-либо значимое пока никому на Земле не удалось, но благодаря изучению природы постоянных магнитов человечество имеет реальный шанс приблизиться к использованию колоссального источника энергии в виде постоянных магнитов.
Безусловно, доказать что-либо значимое пока никому на Земле не удалось, но благодаря изучению природы постоянных магнитов человечество имеет реальный шанс приблизиться к использованию колоссального источника энергии в виде постоянных магнитов.
И хотя магнитная тема ещё далека от полного изучения, существует множество изобретений, теорий и научно обоснованных гипотез в отношении вечного двигателя. При этом есть немало впечатляющих устройств, выдаваемых за таковые. Сам же двигатель на магнитах уже вполне себе существует, хотя и не в том виде, в котором нам бы хотелось, ведь по прошествии некоторого времени магниты всё равно утрачивают свои магнитные свойства. Но, несмотря на законы физики, учёные мужи смогли-таки создать нечто надёжное, что работает за счёт энергии, вырабатываемой магнитными полями.
На сегодня существует несколько видов линейных двигателей, которые отличаются по своему строению и технологии, но работают на одних и тех же принципах. К ним относятся:
К ним относятся:
- Работающие исключительно за счёт действия магнитных полей, без устройств управления и без потребления энергии извне;
- Импульсного действия, которые уже имеют и устройства управления, и дополнительный источник питания;
- Устройства, объединяющие в себе принципы работы обоих двигателей.
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%. Со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательства через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Устройство и принцип работы
Сегодня существует достаточно большое количество магнитных двигателей, некоторые из них схожи, другие имеют принципиально отличительную конструкцию.
Для примера мы рассмотрим наиболее наглядный вариант:
Принцип действия магнитного двигателя
Как видите на рисунке, мотор состоит из следующих компонентов:
- Магнит статора здесь только один и расположен он на пружинном маятнике, но такое размещение требуется только в экспериментальных целях.
 Если вес ротора окажется достаточным, то инерции движения хватит для преодоления самого малого расстояния между магнитами и статор может иметь стационарный магнит без маятника.
Если вес ротора окажется достаточным, то инерции движения хватит для преодоления самого малого расстояния между магнитами и статор может иметь стационарный магнит без маятника. - Ротор дискового типа из немагнитного материала.
- Постоянные магниты, установленные на роторе в форме улитки в одинаковое положение.
- Балласт — любой увесистый предмет, который даст нужную инерционность (в рабочих моделях эту функцию может выполнять нагрузка).
 Если вес ротора окажется достаточным, то инерции движения хватит для преодоления самого малого расстояния между магнитами и статор может иметь стационарный магнит без маятника.
Если вес ротора окажется достаточным, то инерции движения хватит для преодоления самого малого расстояния между магнитами и статор может иметь стационарный магнит без маятника.Все, что нужно для работы такого агрегата — это придвинуть магнит статора на достаточное расстояние к ротору в точке самого наибольшего удаления, как показано на рисунке. После этого магниты начнут притягиваться по мере приближения формы улитки по кругу, и начнется вращение ротора. Чем меньше размер магнитов и чем более плавная форма получится, тем легче произойдет движение. В месте максимального сближения на диске установлена «собачка», которая сместит маятник от нормального положения, чтобы магниты не притянулись в статическое положение.
Требования к вечным двигателям
Так как такие устройства должны работать постоянно, то и требования к ним должны предъявляться особые:
- полное сохранение движения;
- идеальная прочность деталей;
- обладание исключительной износостойкостью.
Вечный двигатель с научной точки зрения
Что говорит по этому поводу наука? Она не отрицает возможность создания такого двигателя, который будет работать на принципе использования энергии совокупного гравитационного поля. Она же – энергия вакуума или эфира. В чем должен заключаться принцип работы такого двигателя? В том, что это должна быть машина, в которой непрерывно действует сила, вызывающая движение без участия внешнего влияния.
Современная классификация вечных двигателей
- Вечный двигатель первого рода — двигатель (воображаемая машина), способный бесконечно совершать работу без затрат топлива или других энергетических ресурсов. Их существование противоречит первому закону термодинамики. Согласно закону сохранения энергии, все попытки создать такой двигатель обречены на провал.
- Вечный двигатель второго рода — воображаемая машина, которая будучи пущена в ход, превращала бы в работу всё тепло, извлекаемое из окружающих тел (см. Демон Максвелла). Они противоречат второму закону термодинамики. Согласно Второму началу термодинамики, все попытки создать такой двигатель обречены на провал.
 Согласно закону сохранения энергии, все попытки создать такой двигатель обречены на провал.
Согласно закону сохранения энергии, все попытки создать такой двигатель обречены на провал.История возникновения вечного двигателя
Первые упоминания о создании такого устройства возникли в Индии в VII веке, но первые практические пробы его создания возникли в VIII веке в Европе. Естественно, создание такого устройства позволило бы значительно ускорить развитие науки энергетики.
В те времена, такой силовой агрегат смог бы не только поднимать разные грузы, но и крутить мельницы, а также водяные насосы. В XX веке произошло знаменательное открытие, которое дало толчок к созданию силового агрегата – открытие постоянного магнита с последующим изучением его возможностей.
Модель мотора на его основе должна была работать неограниченное количество времени, из-за чего его назвали вечным. Но как бы там ни было, а вечного ничего нет, так как любая часть или деталь может прийти в неисправность, поэтому под словом «вечно» необходимо понимать только то, что он должен работать без перерывов, при этом не подразумевая каких-либо затрат, включая топливо.
Сейчас невозможно точно определить создателя первого вечного механизма, в основе которого, стоят магниты. Естественно, он сильно отличается от современного, но есть некоторые мнения на тот счет, что первые упоминания о силовом агрегате на магнитах, есть в трактате Бхскара Ачарья математика из Индии.
Первые сведения о появления такого устройства в Европе, появились в XIII веке. Информация поступила от Виллара д’Оннекура, выдающегося инженера и архитектора. После своей смерти, изобретатель оставил потомкам свой блокнот, в котором были разные чертежи не только сооружений, но и механизмов для поднятия грузов и собственно первым устройством на магнитах, что отдаленно напоминает вечный двигатель.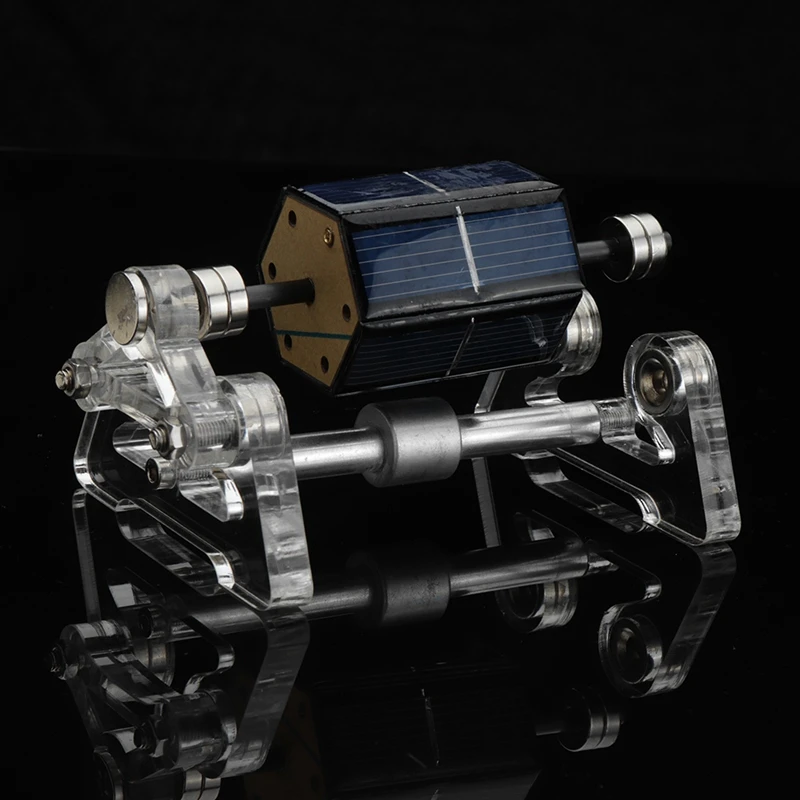
Реальные перспективы создания вечного двигателя на магнитах
Противники теории создания вечного двигателя говорят о невозможности нарушения закона о сохранении энергии. Действительно, нет совершенно никаких предпосылок к тому, чтобы получить энергию из ничего. С другой стороны, магнитное поле – это вовсе не пустота, а особый вид материи, плотность которого может достигать 280 кДж/м³. Именно это значение и является потенциальной энергией, которую теоретически может использовать вечный двигатель на постоянных магнитах. Несмотря на отсутствие готовых образцов в общем доступе, о возможности существования подобных устройств говорят многочисленные патенты, а также факт наличия перспективных разработок, которые остаются засекреченными еще с советских времен.
Норвежский художник Рейдар Финсруд создал свой вариант вечного двигателя на магнитах
К созданию подобных электрогенераторов приложили силы знаменитые физики-ученые: Никола Тесла, Минато, Василий Шкондин, Говард Джонсон и Николай Лазарев. Следует сразу оговориться, что создаваемые с помощью магнитов двигатели называются «вечными» условно — магнит теряет свои свойства через пару сотен лет, а вместе с ним прекратит работу и генератор.
Следует сразу оговориться, что создаваемые с помощью магнитов двигатели называются «вечными» условно — магнит теряет свои свойства через пару сотен лет, а вместе с ним прекратит работу и генератор.
Самые известные аналоги вечного двигателя магнитах
Многочисленные энтузиасты стараются создать вечный двигатель на магнитах своими руками по схеме, в которой вращательное движение обеспечивается взаимодействием магнитных полей. Как известно, одноименные полюса отталкиваются друг от друга. Именно этот эффект и лежит в основе практически всех подобных разработок. Грамотное использование энергии отталкивания одинаковых полюсов магнита и притяжения разноименных полюсов в замкнутом контуре позволяет обеспечить длительное безостановочное вращение установки без приложения внешней силы.
Разновидности магнитных двигателей и их схемы
Сегодня существует много моделей бестопливных генераторов, электрических машин и моторов, чей принцип действия основан на природных свойствах постоянных магнитов. Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Магнитный униполярный двигатель Тесла
Выдающийся ученый, ставший в свое время пионером в области снабжения эл. током, асинхронных электродвигателей на переменном токе, не обделил своим вниманием и расчетом вопрос вечного источника энергии. В научной среде это изобретение именуется иначе, как униполярный генератор Тесла.
Первоначально расчет данного типа устройства вел Фарадей, но его прототип при сходном принципе действия не обладал должной эффективностью, стабильностью работы, то есть не достиг цели. Термин «униполярный» означает, что в схеме агрегата кольцевой, дисковый (пластина) или цилиндровый проводник расположен в цепи между полюсами постоянного магнита.
Магнитный двигатель Тесла и его схема
На схеме, которая была представлена в оригинальном патенте, есть конструкция с двумя валами, на которых размещаются две пары магнитов: В, В создают условно положительное поле, а С, С – отрицательное. Между ними располагаются униполярные диски с отбортовкой, используемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой тонкой металлической лентой, которая может быть в принципе использована, как проводник (в оригинале) или для вращения диска.
Между ними располагаются униполярные диски с отбортовкой, используемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой тонкой металлической лентой, которая может быть в принципе использована, как проводник (в оригинале) или для вращения диска.
Минато
Этот пример нельзя назвать самовращающимся двигателем, так как для его работы требуется постоянная подпитка электрической энергией. Но такой электромагнитный мотор позволяет получать значительную выгоду, затрачивая минимум электричества для выполнения физической работы.
Схема двигателя Минато
Как видите на схеме, особенностью этого вида является необычный подход к расположению магнитов на роторе. Для взаимодействия с ним на статоре возникают магнитные импульсы за счет кратковременной подачи электроэнергии через реле или полупроводниковый прибор.
При этом ротор будет вращаться, пока его элементы не размагнитятся. Сегодня все еще ведутся разработки по улучшению и повышению эффективности устройства, поэтому назвать его полностью завершенным нельзя.
«Тестатика» Пауля Баумана
Одна из самых известных разработок – это «тестатика» Баумана. Устройство напоминает своей конструкцией простейшую электростатическую машину с лейденскими банками. «Тестатик» состоит из пары акриловых дисков (для первых экспериментов использовались обычные музыкальные пластинки), на которые наклеены 36 узких и тонких полосок алюминия.
Кадр из документального фильма: к Тестатике подключили 1000-ваттную лампу. Слева — изобретатель Пауль Бауман
После того, как диски толкали пальцами в противоположные стороны, запущенный двигатель продолжал работать неограниченно долгое время со стабильной скоростью вращения дисков на уровне 50-70 оборотов в минуту. В электроцепи генератора Пауля Баумана удается развить напряжение до 350 вольт с силой тока до 30 Ампер.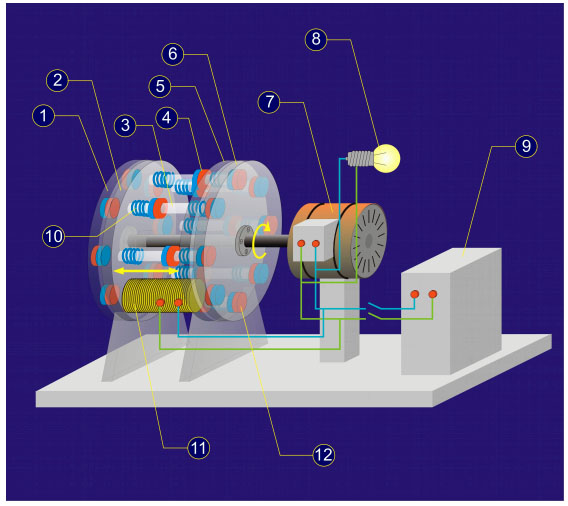 Из-за небольшой механической мощности это скорее не вечный двигатель, а генератор на магнитах.
Из-за небольшой механической мощности это скорее не вечный двигатель, а генератор на магнитах.
Роторный кольцар Лазарева
Большой популярностью пользуется схема вечного двигателя на магнитах на основе проекта Лазарева. На сегодняшний день его роторный кольцар считается устройством, реализация которая максимально близка к концепции вечного двигателя. Важное преимущество разработки Лазарева состоит в том, что даже без профильных знаний и серьезный затрат можно собрать подобный вечный двигатель на неодимовых магнитах своими руками. Такое устройство представляет собой емкость, разделенную пористой перегородкой на две части. Автор разработки использовал в качестве перегородки специальный керамический диск. В него устанавливается трубка, а в емкость заливается жидкость. Для этого оптимально подходят улетучивающиеся растворы (например, бензин), но можно использовать и простую водопроводную воду.
Механизм работы двигателя Лазарева очень просто. Сначала жидкость подается через перегородку вниз емкости. Под давлением раствор начинает подниматься по трубке. Под получившейся капельницей размещают колесо с лопастями, на которых устанавливают магниты. Под силой падающих капель колесо вращается, образуя постоянное магнитное поле. На основе этой разработки успешно создан самовращающийся магнитный электродвигатель, на которой зарегистрировало патент одно отечественное предприятие.
Сначала жидкость подается через перегородку вниз емкости. Под давлением раствор начинает подниматься по трубке. Под получившейся капельницей размещают колесо с лопастями, на которых устанавливают магниты. Под силой падающих капель колесо вращается, образуя постоянное магнитное поле. На основе этой разработки успешно создан самовращающийся магнитный электродвигатель, на которой зарегистрировало патент одно отечественное предприятие.
Говарда Джонсона
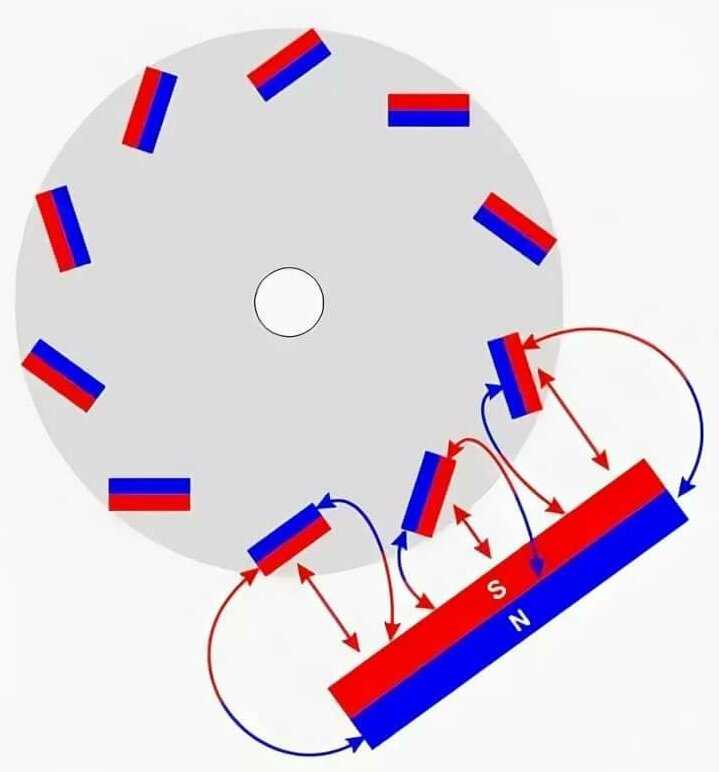
В своих исследованиях Джонсон руководствовался теорией потока непарных электронов, действующих в любом магните. В его двигателе обмотки статора формируются из магнитных дорожек. На практике эти агрегаты получили реализацию в конструкции роторного и линейного двигателя. Пример такого устройства приведен на рисунке ниже:
Двигатель Джонсона
Как видите, на оси вращения в двигателе устанавливаются сразу и статор и ротор, поэтому классически вал вращаться здесь не будет. На статоре магниты повернуты одноименным полюсом к роторным, поэтому они взаимодействуют на силах отталкивания. Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Антигравитационный магнитный двигатель Лоренца
Двигатель Лоренца можно сделать самостоятельно с использованием простых материалов
Если вы хотите собрать вечный двигатель на магнитах своими руками, то обратите внимание на разработки Лоренца. Антигравитационный магнитный двигатель его авторства считается наиболее простым в реализации. В основе этого устройства лежит использование двух дисков с разными зарядами. Их наполовину помещают в полусферический магнитный экран из сверхпроводника, который полностью выталкивает из себя магнитные поля. Такое устройство необходимо для изоляции половин дисков от внешнего магнитного поля. Запуск этого двигателя выполняется путем принудительного вращения дисков навстречу друг другу. По сути, диски в получившейся система являются парой полувитков с током, на открытые части которых будут воздействовать силы Лоренца.
Генератор Перендева
Еще одним неоднозначным примером действия магнитных сил является самовращающийся магнитный двигатель Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное производство, даже успел обзавестись патентом, создать одноименную фирму (Перендев) и поставить дело на поток. Если анализировать представленную в патенте схему и принцип, или чертежи самодельных эл. двигателей, то ротор и статор имеют форму диска и внешнего кольца. На них по кольцевой траектории размещают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, возникает момент и происходит их взаимное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
Вакуумный триодный усилитель Свита Флойда
Сложность воспроизведения устройства Свита Флойда заключается не в его конструкции, а в технологии изготовления магнитов. В основе этого двигателя используются два ферритовых магнита с габаритами 10х15х2,5 см, а также катушки без сердечников, из которых одна является рабочей с несколькими сотнями витков, а еще две – возбуждающие. Для запуска триодного усилителя необходима простая карманная батарейка 9В. После включения устройство может работать очень долго, самостоятельно питая себя по аналогии с автогенератором. По утверждениям Свита Флойда, от работающей установки удалось получить выходное напряжение в 120 вольт с частотой 60 Гц, мощность которого достигала 1 кВт.
Для запуска триодного усилителя необходима простая карманная батарейка 9В. После включения устройство может работать очень долго, самостоятельно питая себя по аналогии с автогенератором. По утверждениям Свита Флойда, от работающей установки удалось получить выходное напряжение в 120 вольт с частотой 60 Гц, мощность которого достигала 1 кВт.
Мотор-колесо Шкондина
Если вы ищете интересные варианты, как сделать вечный двигатель из магнитов, то обязательно обратите внимание на разработку Шкондина. Конструкцию его линейного двигателя можно охарактеризовать как «колесо в колесе». Это простое, но в то же время производительное устройство успешно используется для велосипедов, скутеров и другого транспорта. Импульсно-инерционное мотор-колесо представляет собой объединение магнитных дорожек, параметры которых динамично изменяются путем переключения обмоток электромагнитов.
Общая схема линейного двигателя Василия Шкондина
Ключевыми элементами устройства Шкондина являются внешний ротор и статор особой конструкции: расположение 11 пар неодимовых магнитов в вечном двигателе выполнено по кругу, что образует в общей сложности 22 полюса. На роторе установлены 6 электромагнитов в форме подков, которые установлены попарно и смещены друг к другу на 120°. Между полюсами электромагнитов на роторе и между магнитами на статоре одинаковое расстояние. Изменение положения полюсов магнитов относительно друг друга приводит к созданию градиента напряженности магнитного поля, образуя крутящий момент.
На роторе установлены 6 электромагнитов в форме подков, которые установлены попарно и смещены друг к другу на 120°. Между полюсами электромагнитов на роторе и между магнитами на статоре одинаковое расстояние. Изменение положения полюсов магнитов относительно друг друга приводит к созданию градиента напряженности магнитного поля, образуя крутящий момент.
Неодимовый магнит в вечном двигателе на основе конструкции проекта Шкондина имеет ключевое значение. Когда электромагнит проходит через оси неодимовых магнитов, то образуется магнитный полюс, который является одноименным по отношению к преодоленному полюсу и противоположным по отношению к полюсу следующего магнита. Получается, что электромагнит всегда отталкивается от предыдущего магнита и притягивается к следующему. Такие воздействия и обеспечивают вращение обода. Обесточивание элетромагнита при достижении оси магнита на статоре обеспечивается размещением в этой точке токосъемника.
Житель г. Пущино Василий Шкондин изобрел не вечный двигатель, а высокоэффективные мотор-колёса для транспорта и генераторы электроэнергии.
Пущино Василий Шкондин изобрел не вечный двигатель, а высокоэффективные мотор-колёса для транспорта и генераторы электроэнергии.
Коэффициент полезного действия двигателя Шкондина составляет 83%. Конечно, это пока еще не полностью энергонезависимый вечный двигатель на неодимовых магнитах, но очень серьезный и убедительный шаг в правильном направлении. Благодаря особенностям конструкции устройства на холостом ходу удается вернуть часть энергии батареям (функция рекуперации).
Свинтицкого
Еще в конце 90-х украинский конструктор предложит модель самовращающегося магнитного двигателя, который стал настоящим прорывом в технике. За основу им был взят асинхронный двигатель Ванкеля, которому не удалось решить проблему с преодолением 360° оборота.
Игорь Свинтицкий эту проблему решил и получил патент, обратился в ряд компаний, однако асинхронное магнитное чудо техники никого не заинтересовало, поэтому проект был закрыт и за его масштабное тестирование ни одна компания не взялась.
Джона Серла
От электрического мотора такой магнитный двигатель отличает взаимодействие исключительно магнитного поля статора и ротора. Но последний выполняется наборными цилиндрами с таблетками из специального сплава, которые создают магнитные силовые линии в противоположном направлении. Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Двигатель Серла
Полюса постоянных магнитов расположены так, что один толкает следующий и т.д. Начинается цепная реакция, приводящая в движение всю систему магнитного двигателя, до тех пор, пока магнитной силы будет хватать хотя бы для одного цилиндра.
Магнитно-гравитационный двигатель
Здесь все немного проще, чем в предыдущем варианте. Для создания такого устройства нужны постоянные магниты и грузы определённых параметров. Работает это так: в центре вращающегося колеса находится основной магнит, а вокруг него (на краях колеса) расположены вспомогательные магниты и грузы. Магниты взаимодействуют друг с другом, а грузы находятся в движении и перемещаются то ближе к центру вращения, то дальше. Таким образом центр массы смещается, и колесо вращается.
Магниты взаимодействуют друг с другом, а грузы находятся в движении и перемещаются то ближе к центру вращения, то дальше. Таким образом центр массы смещается, и колесо вращается.
Алексеенко
Интересный вариант магнитного двигателя представил ученый Алексеенко, который создал устройство с роторными магнитами необычной формы.
Двигатель Алексеенко
Как видите на рисунке, магниты имеют необычную изогнутую форму, которая максимально сближает противоположные полюса. Что делает магнитные потоки в месте сближения значительно сильнее. При начале вращения отталкивание полюсов получается значительно большим, что и должно обеспечить непрерывное движение по кругу.
Синхронный двигатель на постоянных магнитах
Синхронный двигатель на постоянных частотах представляет собой основной вид электродвигателя, где частоты вращения ротора и статора находятся на одинаковом уровне. Классический электромагнитный силовой агрегат имеет обмотки на пластинах, но если сменить конструкцию якоря и вместо катушки установить постоянные магниты, тогда получится достаточно эффективная модель синхронного силового агрегата.
Классический электромагнитный силовой агрегат имеет обмотки на пластинах, но если сменить конструкцию якоря и вместо катушки установить постоянные магниты, тогда получится достаточно эффективная модель синхронного силового агрегата.
Схема статора имеет классическую компоновку магнитопровода, куда входят обмотка и пластины, где и скапливается магнитное поле электротока. Это поле взаимодействует с постоянным полем ротора, что и создает крутящий момент.
Помимо всего прочего, необходимо учесть, что исходя из конкретного типа схемы, расположение якоря и статора могут быть изменены, так например первый, может быть сделан в виде внешней оболочки. Для активации мотора от тока сети, применяется цепь магнитного пускателя и теплового защитного реле.
Как собрать двигатель самостоятельно
Не менее популярными являются и самодельные варианты таких устройств. Они достаточно часто встречаются на просторах интернета не только в качестве рабочих схем, но и конкретно выполненных и работающих агрегатов.
Один из самых простых в создании в домашних условиях устройств, создается с использованием 3 соединенных между собой валов, которые скреплены таким методом, чтобы центральный, был повернут на те, что находятся по сторонам.
В центр того вала, что посередине, прикрепляется диск из люцита, диаметром в 4 дюйма, а толщиной в 0,5 дюймов. Те валы, которые располагаются по сторонам, также имеют диски на 2 дюйма, на которых располагаются магниты по 4 штуки на каждом, а на центральном вдвое больше – 8 штук.
Ось обязательно должна находиться по отношению валов в параллельной плоскости. Концы возле колес проходят с проблеском в 1 минуту. В случае если начать перемещать колеса, тогда концы магнитной оси начнут синхронизироваться. Чтобы придать ускорения, необходимо поставить в основание устройства брусок из алюминия. Один его конец должен немного касаться магнитных деталей. Как только усовершенствовать конструкцию таким образом, агрегат будет вращаться быстрее, на пол оборота в 1 секунду.
Watch this video on YouTube
Watch this video on YouTube
Приводы были установлены так, чтобы валы вращались аналогично друг другу. В случае если на систему попробовать воздействовать пальцем или каким-то другим предметом, тогда она остановится.
Руководствуясь такой схемой, можно своими силами создать магнитный агрегат.
Какие достоинства и недостатки имеют реально работающие магнитные двигатели
Среди преимуществ таких агрегатов, можно отметить следующие:
- Полная автономность с максимальной экономией топлива.
- Мощное устройство с использованием магнитов, может обеспечивать помещение энергией в 10 кВт и более.
- Такой двигатель работает до полного эксплуатационного износа.
Пока что, не лишены такие двигатели и недостатков:
- Магнитное поле может отрицательным образом влиять на человеческое здоровье и самочувствие.
- Большое количество моделей не может эффективно работать в бытовых условиях.
- Есть небольшие сложности в подключении даже готового агрегата.
- Стоимость таких двигателей достаточно велика.

Такие агрегаты уже давно не являются вымыслом и в скором времени вполне смогут заменить привычные силовые агрегаты. На данный момент, они не могут составить конкуренцию привычным двигателям, но потенциал к развитию имеется.
Почему вечный двигатель невозможен
Когда речь заходит о вечном двигателе, главная проблема — путаница в формулировках. Почему-то некоторые считают, что вечный двигатель – это машина, которая движется постоянно, что она никогда не останавливается. Эта правда, но лишь отчасти.
Действительно, если вы однажды установили и запустили вечный двигатель, он должен будет работать до «скончания времён». Назвать срок работы двигателя «долгим» или «продолжительным» – значит сильно преуменьшить его возможности. Однако, ни для кого не секрет, что вечного двигателя в природе нет и не может существовать.
Но как же быть с планетами, звездами и галактиками? Ведь все эти объекты находятся в постоянном движении, и это движение будет существовать постоянно, до тех пор пока существует Вселенная, пока не наступит время вечной, бесконечной, абсолютной темноты. Это ли не вечный двигатель?
Это ли не вечный двигатель?
Именно при ответе на этот вопрос и вскрывается та путаница в формулировках, о которой мы говорили в начале. Вечное движение не есть вечный двигатель! Само по себе движение во Вселенной «вечно». Движение будет существовать до тех пор, пока существует Вселенная. Но так называемый вечный двигатель — это устройство, которое не просто движется бесконечно, оно еще и вырабатывает энергию в процессе своего движения. Поэтому верно то определение, которое даёт Википедия:
| Вечный двигатель — это воображаемое устройство, вырабатывающее полезную работу бо́льшую, чем количество сообщённой этому устройству энергии. |
В интернете можно найти множество проектов, которые предлагают модели вечных двигателей. Глядя на эти конструкции, можно подумать, что они способны работать без остановки, постоянно вырабатывая энергию. Если бы нам действительно удалось спроектировать вечный двигатель, последствия были бы ошеломляющими. Это был бы вечный источник энергии, более того, бесплатной энергии. К сожалению, из-за фундаментальных законов физики нашей Вселенной, создание вечных двигателей невозможно. Разберёмся, почему это так.
Это был бы вечный источник энергии, более того, бесплатной энергии. К сожалению, из-за фундаментальных законов физики нашей Вселенной, создание вечных двигателей невозможно. Разберёмся, почему это так.
Видео в помощь
Источники
- https://220v.guru/elementy-elektriki/dvigateli/magnitnyy-vechnyy-dvigatel-delaem-svoimi-rukami.html
- https://www.asutpp.ru/magnitnyj-dvigatel.html
- https://www.syl.ru/article/189970/new_kak-sdelat-vechnyiy-dvigatel-svoimi-rukami
- https://dic.academic.ru/dic.nsf/ruwiki/839655
- https://odinelectric.ru/knowledgebase/chto-takoe-magnitniy-dvigatel
- https://MirMagnitov.ru/blog/primenenie-magnitov/vechnyy-dvigatel-na-magnitakh/
- https://electricvdele.ru/elektrooborudovanie/elektrodvigateli/dvigatel-na-postoyannyh-magnitah. html
- https://220v.guru/elementy-elektriki/dvigateli/vechnyy-dvigatel-svoimi-rukami-ego-opisanie-i-vidy.html
- https://yourtutor.info/%D0%BF%D0%BE%D1%87%D0%B5%D0%BC%D1%83-%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B9-%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8C-%D0%BD%D0%B5%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%B5%D0%BD
 html
html[свернуть]
Возможен ли магнитный «вечный двигатель»? . Удивительная физика
С магнитами связаны многочисленные проекты «вечных двигателей», которые оказалось довольно трудно разоблачить.
В хронологическом порядке это выглядит так. Еще в XIII в. средневековый исследователь магнитов Пьер Перигрин де Марикур утверждал, что если магнитный камень обточить в виде правильного шара и направить его полюсами точно по оси мира, то такой шар завертится и будет вертеться вечно.
Сам де Марикур такого опыта не делал, хотя магнитные шары у него были, и другие эксперименты он с ними проделывал. Видимо, он считал, что сам недостаточно точно изготовил шар либо направил его полюсами не по оси мира. Но он настойчиво советовал читателям изготовить и опробовать магнитный вечный двигатель, добавляя: «Если выйдет, вы насладитесь, если нет – вините свое малое искусство!»
Но он настойчиво советовал читателям изготовить и опробовать магнитный вечный двигатель, добавляя: «Если выйдет, вы насладитесь, если нет – вините свое малое искусство!»
У этого же автора имеется описание еще одного «вечного двигателя» – зубчатого колеса с зубьями из стали и серебра через один. Если поднести к этому колесу магнит, утверждал де Марикур, колесо придет во вращение. Здесь де Марикур был очень близок к постройке хоть и не вечного, но по крайней мере теплового, двигателя, который в то время несомненно сочли бы за «вечный». Но об этом после, а пока о «настоящих» «вечных двигателях».
Любителей изготовлять магнитные «вечные двигатели» было великое множество. Английский епископ Джон Вилькенс в XVII в. даже получил официальное подтверждение изобретения им «вечного двигателя», но от этого последний не заработал. На рис. 331 показан принцип его действия. По мысли автора, стальной шарик, притягиваемый магнитом, поднимается по верхней наклонной плоскости, но, не достигнув магнита, проваливается в отверстие и катится по нижнему лотку. Скатившись, он снова попадает на прежний свой путь и так вечно продолжает свое движение.
Скатившись, он снова попадает на прежний свой путь и так вечно продолжает свое движение.
На самом деле все выходило иначе. Если магнит был силен, то шарик не проваливался в отверстие, а перескакивал через него и прилипал к магниту. Если магнит был слаб, то шарик останавливался на полдороге на нижнем лотке, либо не сходил с нижней точки вообще. А вот «вечный двигатель», который построил сам автор в детстве, и был очень удивлен, когда тот не заработал.
В круглую пластмассовую коробочку, посаженную на спицу, как колесо на ось, помещался стальной шарик. Спереди нужно было поднести магнит, и коробочка-колесо должна была завертеться на спице (рис. 332). Еще бы: шарик притягивался магнитом, поднимался по стенке коробочки, как белка в колесе, как та же белка начинал, падая вниз, крутить колесо. Однако колесо вертеться не хотело. Как выяснилось, шарик под действием магнита поднимался, прижимаясь к стенке коробки, и падать вниз не собирался.
Рис. 331. Магнитный «вечный двигатель» Д. Вилькенса
Вилькенса
Рис. 332. «Вечный двигатель» с магнитом и шариком: 1 – пластмассовая коробка; 2 – магнит; 3 – стальной шарик
Но существуют и реальные магнитные двигатели, которые с первого взгляда похожи на вечные.
Еще сам Гильберт заметил, что если железо сильно нагреть, то оно совершенно перестает притягиваться магнитом. Сейчас температуру, при которой железо, сталь или сплавы теряют магнитные свойства, называют точкой Кюри, по имени физика Пьера Кюри, объяснившего это явление. Если бы эти магнитные свойства не терялись, то раскаленные болванки в кузницах можно было бы переносить магнитами, что очень заманчиво.
Но это свойство позволило создать так называемую магнитную мельницу, или карусель. Подвесим на нити деревянный диск или поставим его на стальную иглу подобно стрелке компаса. Затем воткнем в него несколько спиц и приставим сбоку полюс сильного магнита (рис. 333). Чем не зубчатое колесо де Марикура? Разумеется, как и то колесо, наша мельница вращаться не будет, пока мы не нагреем соседнюю с магнитом спицу в пламени горелки и легким толчком не сообщим вращение. Нагретая спица уже не притягивается к магниту, а следующая стремится к нему, пока не попадет в пламя горелки. А пока нагретая спица пройдет полный круг, она остынет и снова притянется магнитом.
Нагретая спица уже не притягивается к магниту, а следующая стремится к нему, пока не попадет в пламя горелки. А пока нагретая спица пройдет полный круг, она остынет и снова притянется магнитом.
Рис. 333. Магнитная карусель: 1 – стальные спицы; 2 – магнит; 3 – пламя
Чем не вечный двигатель? А тем, что на вращение его уходит энергия горелки. Стало быть, этот двигатель не вечный, а тепловой, в принципе такой же, как на автомобилях и тепловозах.
Работающие на этом же принципе магнитные качели легко построить и самому. Небольшой железный предмет подвесим на проволоке к вершине стойки качелей. Легче всего взять длинный кусок железной проволоки и скатать ее конец в небольшой комочек. Затем на небольшую подставку положим магнит, направленный одним полюсом вбок. Будем придвигать подставку с магнитом к подвешенному железному комочку, пока он не притянется к магниту.
Рис. 334. Магнитные качели: 1 – магнит; 2 – комок железной проволоки; 3 – пламя
Теперь подставим под качели спиртовку, свечу или другую горелку так, чтобы комочек оказался над самым пламенем (рис. 334). Через некоторое время, нагревшись до точки Кюри, он отпадет от магнита. Раскачиваясь в воздухе, он снова охладится и опять притянется к полюсу магнита. Получатся интересные качели, которые будут раскачиваться до тех пор, пока мы не уберем горелку.
334). Через некоторое время, нагревшись до точки Кюри, он отпадет от магнита. Раскачиваясь в воздухе, он снова охладится и опять притянется к полюсу магнита. Получатся интересные качели, которые будут раскачиваться до тех пор, пока мы не уберем горелку.
Комочек, скатанный из проволоки, хорош для опыта тем, что он и нагревается, и охлаждается быстрее, чем, например, цельный стальной шарик. Поэтому и раскачиваться такие качели будут чаще, чем с шариком на нити.
В практике этот принцип иногда используют для автоматической закалки мелких стальных предметов, например игл. Холодные иголки висят, притянутые магнитом, и нагреваются. Как только они нагреются до точки Кюри, то перестают притягиваться и падают в закалочную ванну.
Обычное железо имеет достаточно высокую точку Кюри: 753 °C, но сейчас получены сплавы, для которых точка Кюри ненамного превышает комнатную температуру. Нагретый солнечным теплом, такой материал, особенно окрашенный в темный цвет, уже немагнитен. А в тени магнитные свойства восстанавливаются, и материал снова может притягиваться. Например, у металла гадолиния точка Кюри всего 20 °C.
Например, у металла гадолиния точка Кюри всего 20 °C.
Изобретатель и журналист А. Пресняков создал на этом принципе двигатель, непрерывно качающий воду в жаркой пустыне. Солнце сполна обеспечивает его своей энергией. Построена даже тележка, автоматически двигающаяся навстречу Солнцу и даже электролампе (рис. 335). Такие двигатели, работающие на чистой и даровой энергии Солнца, очень перспективны, особенно при освоении Луны и других планет. Чем не «вечные двигатели», о которых мечтал де Марикур?
Рис. 335. Тележка А. Преснякова: 1 – магнит; 2 – обод из материала с низкой точкой Кюри
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
 Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
 Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.

Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.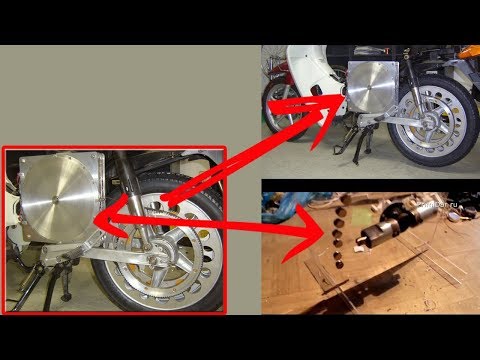
Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Драйверы делятся на две категории:
- Повторяющие форму сигналов. Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
- Формирующие сигналы управления. Используя данный тип драйверов, можно обойтись без микроконтроллеров, так как для их работы достаточно подать меандр и выбрать режимы работы. К этой категории относятся такие драйверы как например A4988.
 Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.
Этот тип драйверов не формирует импульсы, а лишь повторяет их форму для управления двигателем. Формирование импульсов отводится микроконтроллерам (например Arduino). К этой категории относятся такие драйверы как MotorShield на базе чипа L298.Контроллер управления шаговым двигателем
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель – это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов (рис. 1).
1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
-
угол поворота ротора определяется числом импульсов, которые поданы на двигатель -
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны) -
прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу -
возможность быстрого старта/остановки/реверсирования -
высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников -
однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи -
возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора -
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо. ..
..
-
шаговым двигателем присуще явление резонанса -
возможна потеря контроля положения ввиду работы без обратной связи -
потребление энергии не уменьшается даже без нагрузки -
затруднена работа на высоких скоростях -
невысокая удельная мощность -
относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика.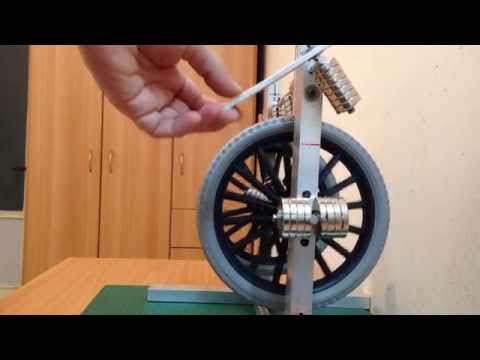 Системы с обратной связью не имеют подобного недостатка.
Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт.
Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей
Существуют три основных типа шаговых двигателей:
-
двигатели с переменным магнитным сопротивлением -
двигатели с постоянными магнитами -
гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 2). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град.
Такой двигатель имет шаг 30 град.
Рис. 2. Двигатель с переменным магнитным сопротивлением.
При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.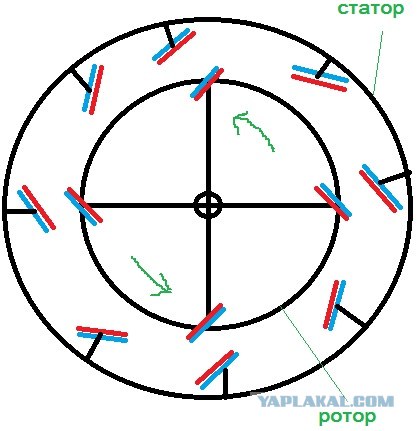
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Рис. 3. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 4.
Рис. 4. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
Рис. 5. Гибридный двигатель.
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.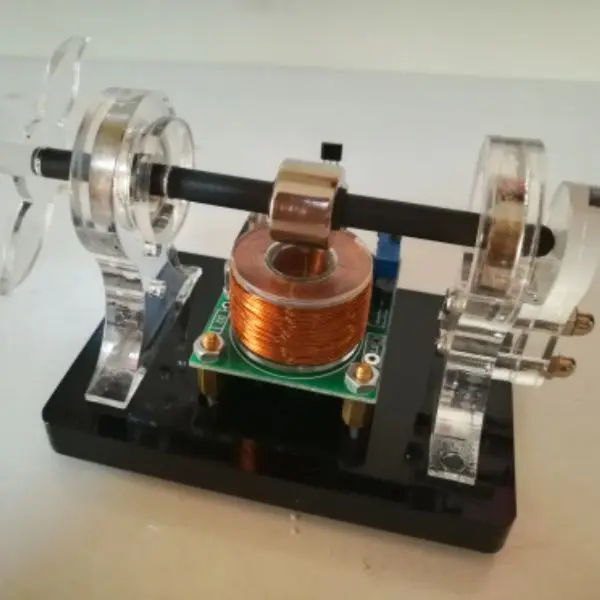 Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N,
где Nph – чило эквивалентных полюсов на фазу = число полюсов ротора,
Ph – число фаз,
N — полное количество полюсов для всех фаз вместе.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1. 8 град.
8 град.
Продольное сечение гибридного шагового двигателя показано на рис. 6. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Рис. 6. Продольный разрез гибридного шагового двигателя.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита.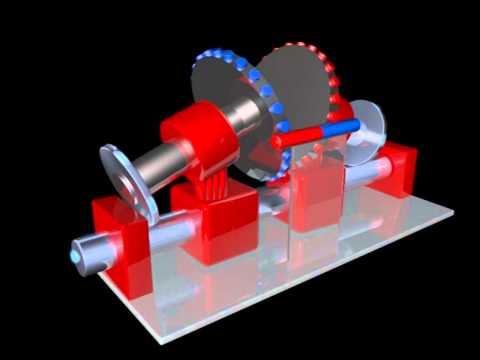 При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).
Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Биполярный или униполярный?
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями.
Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
Диаграммы, диаграммы…
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя.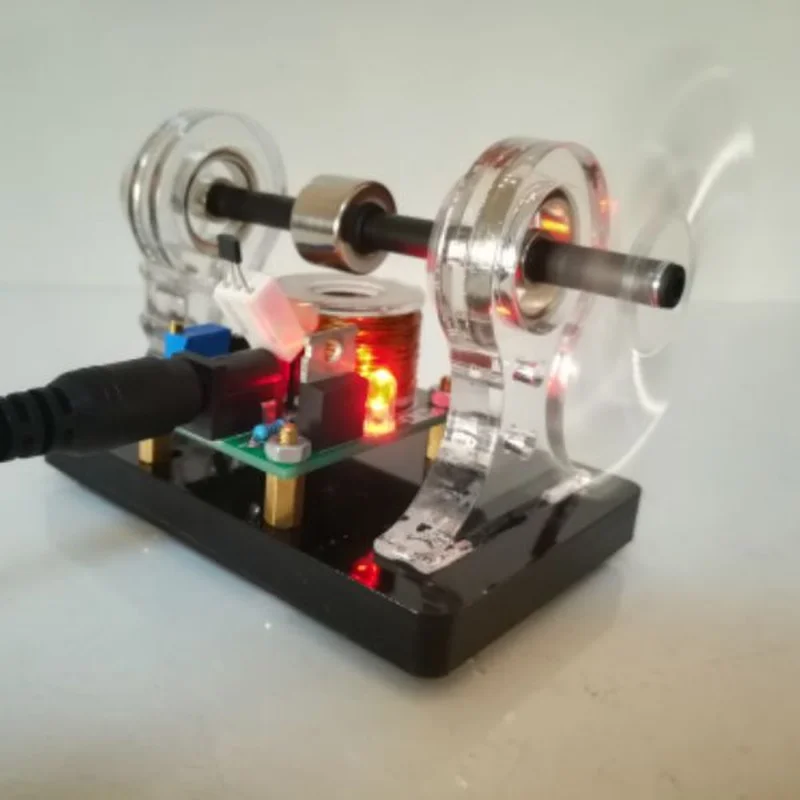 Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ — управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного.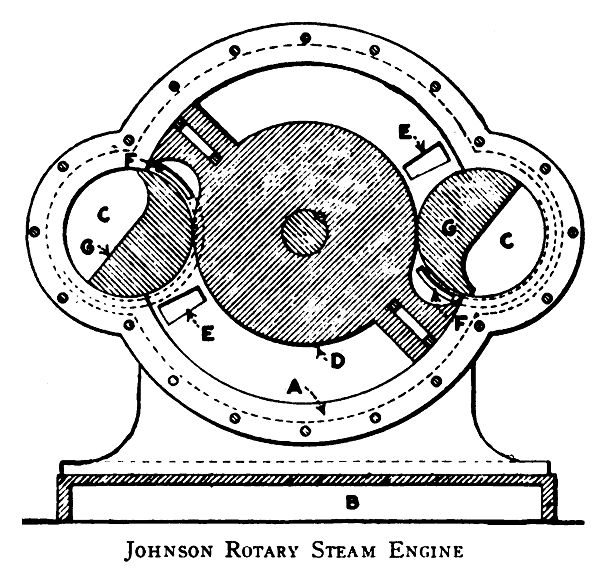 Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз.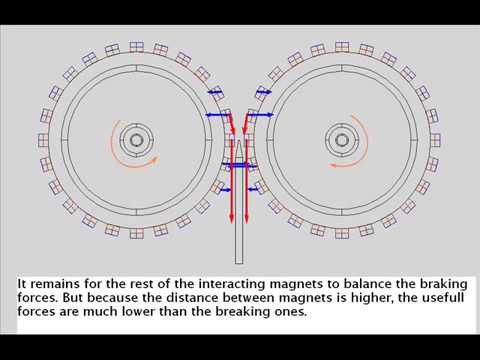 Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Держи его!
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные драйверы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера.
Микрошаговый режим
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Рис. 12. Зависимость момента от угла поворота ротора в случае разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 12), то результирующий момент будет
Th = ( a2 + b2 )0.
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b – момент, создаваемый первой и второй фазой соответственно,
Th – результирующий момент удержания,
x – положение равновесия ротора в радианах,
S – угол шага в радианах.
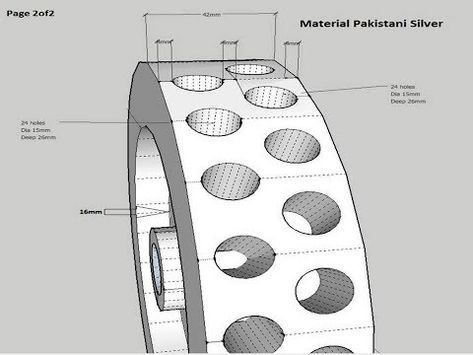 5,
5,
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Ещё раз нужно отметить, что приведенные выше формулы верны только в том случае, если зависимость момента от угла поворота ротора синусоидальная и если ни одна часть магнитной цепи двигателя не насыщается.
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах. На частотах в 2 – 3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Система с шаговым двигателем работает подобно фильтру нижних частот. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Для предотвращения переходных процессов и потери шагов, переключения режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) необходимо производить в те моменты, когда ротор находится в положении, соответствующем одной включенной фазе. Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Во многих приложениях, где требуются малые относительные перемещения и высокая разрешающая способность, микрошаговый режим способен заменить механический редуктор. Часто простота системы является решающим фактором, даже если при этом придется применить двигатель больших габаритов. Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров. Это позволяет сделать практически одинаковой стоимость оборудования для полношагового и микрошагового режимов.
Иногда микрошаговый режим используется для увеличения точности величины шага сверх заявленной производителем двигателя. При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равн
При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равн
Конструкция некоторых двигателей оптимизирована для наилучшей точности в полношаговом режиме и максимального момента удержания. Специальная форма зубцов ротора и статора спроектирована так, чтобы в положении равновесия для полношагового режима магнитный поток сильно возростал. Это приводит к ухудшению точности в микрошаговом режиме. Лучшие результаты позволяют получить двигатели, у которых момент удержания в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения величины магнитного поля, которые приводят к отклонениям момента удержания в микрошаговом режиме и отклонения направления магнитного поля, которые приводят к отклонениям положения равновесия. Отклонения момента удержания в микрошаговом режиме обычно составляют 10 – 30% от максимального момента. Нужно сказать, что и в полношаговом режиме момент удержания может колебаться на 10 – 20 % вследствие искажений геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Вполне естественно, что любое желаемое увеличение разрешающей способности наталкивается на какие-то физические ограничения. Не стоит думать, что точность позиционирования для 7.2 град. двигателя в микрошаговом режиме не уступает точности 1.8 град. двигателя.
Препятствием являются следующие физические ограничения:
- нарастание момента в зависимости от угла поворота у 7. 2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
- как будет показано ниже, если в системе есть трение, то вследствие появления мертвых зон точность позиционирования будет ограничена
- большинство коммерческих двигателей не обладают прецизионной конструкцией и зависимость между моментом и углом поворота ротора не является в точности синусоидальной. Вследствие этого зависимость между фазой синусоидального тока питания и углом поворота вала будет нелинейной. В результате ротор двигателя будет точно проходить положения каждого шага и полушага, а между этими положениями будут наблюдаться довольно значительные отклонения
 2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
Эти проблемы наиболее ярко выражены для двигателей с большим количеством полюсов. Существуют однако двигатели, ещё на этапе разработки оптимизированные для работы в микрошаговом режиме.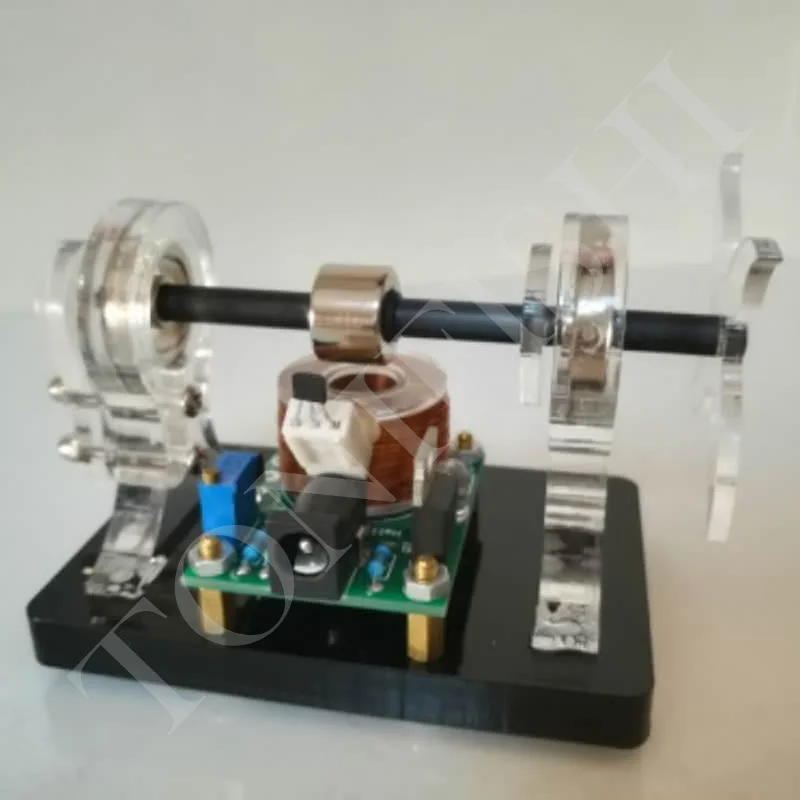 Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Еще один источник погрешностей позиционирования – это ошибка квантования ЦАП, с помощью которого формируются токи фаз. Дело в том, что ток должен формироваться по синусоидальному закону, поэтому для минимизации погрешности линейный ЦАП должен иметь повышенную разрядность. Существуют специализированные драйверы со встроенным нелинейным ЦАПом, который позволяет сразу получать осчеты функции sin. Примером может служить драйвер A3955 фирмы Allegro, который имеет встроенный 3-х разрядный ЦАП, который обеспечивает следующие значения тока фаз: 100%, 92.4%, 83.1%, 70.7%, 55.5%, 38.2%, 19.5%, 0%. Это позволяет работать в микрошаговом режиме с величиной шага 1/8, при этом погрешность установки тока фаз не превышает 2%. Кроме того, этот драйвер имеет возможность управлять скоростью спада тока обмоток двигателя во время работы, что позволяет произвести «тонкую подстройку» драйвера под конкретный двигатель для получения наименьшей погрешности позиционирования.
Даже если ЦАП точно сформировал синусоидальное опорное напряжение, его нужно усилить и превратить в синусоидальный ток обмоток. Многие драйверы имеют значительную нелинейность вблизи нулевого значения тока, что вызывает значительные искажения формы и, как следствие, значительные ошибки позиционирования. Если используются высококачественные драйверы, например PBM3960 и PBL3771 фирмы Ericsson, погрешность, связанная с драйвером исчезающе мала по сравнению с погрешностью двигателя.
Иногда контроллеры шаговых двигателей позволяют корректировать форму выходного сигнала путем добавления или вычитания из синуса его третьей гармоники. Однако такая подстройка должна производится индивидуально под конкретный двигатель, характеристики которого должны быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения (особенно на очень низких скоростях), для устранения шума и явления резонанса. Микрошаговый режим также способен уменьшить время установления механической системы, так как в отличие от полношагового режима отсутствуют выбросы и осцилляции. Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Некоторые из них, например A3955, A3957 фирмы Allegro, уже содержат ЦАП и требуют о микроконтроллера только цифровых кодов. Другие же, такие как L6506, L298 фирмы SGS-Thomson, требуют внешних опорных напряжений синусоидальной формы, которые должен формировать микроконтроллер с помощью ЦАПов. Нужно сказать, что слишком большое количество дискретов синуса не приводит к повышению точности позиционирования, так как начинает доминировать ошибка, связанная с неидеальностью геометрии полюсов двигателя. Тем более, в этом случае отсчеты должны следовать с большой частотой, что является проблемой при их программном формировании. При работе на больших скоростях разрешающую способность ЦАПов можно уменьшить. Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества. Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Зависимость момента от скорости, влияние нагрузки
Момент, создаваемый шаговым двигателем, зависит от нескольких факторов:
- скорости
- тока в обмотках
- схемы драйвера
На рис. 14а показана зависимость момента от угла поворота ротора.
Рис. 14. Возникновение мертвых зон в результате действия трения.
У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.
Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя, для преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от скорости. Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового. На рис. 14а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 14б):
14а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 14б):
d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th),
где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 15).
Рис. 15. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 16б).
Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 16б).
Рис. 16. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 17).
Рис. 17. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона.
Область, которая лежит между кривыми, называется областью разгона.
Нужно отметить, что схема драйвера в значительной степени влияет на ход кривой момент-скорость, но этот вопрос будет рассмотрен ниже.
Разогнать!
Для того, чтобы работать на большой скорости из области разгона (рис. 17), необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно. Использование разгона и торможения позволяет достичь значительно больших скоростей — в индустриальных применениях используются скорости до 10000 полных шагов в секунду. Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора. Однако высокая скорость кратковременно может быть использована при осуществлении позиционирования.
При разгоне двигатель проходит ряд скоростей, при этом на одной из скоростей можно столкнуться с неприятным явлением резонанса. Для нормального разгона желательно иметь нагрузку, момент инерции которой как минимум равен моменту инерции ротора. На ненагруженном двигателе явление резонанса проявляется наиболее сильно. Подробно методы борьбы с этим явлением будут описаны ниже.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. На практике чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно управляющим микроконтроллером, так как именно микроконтроллер обычно является источником тактовой частоты для драйвера шагового двигателя.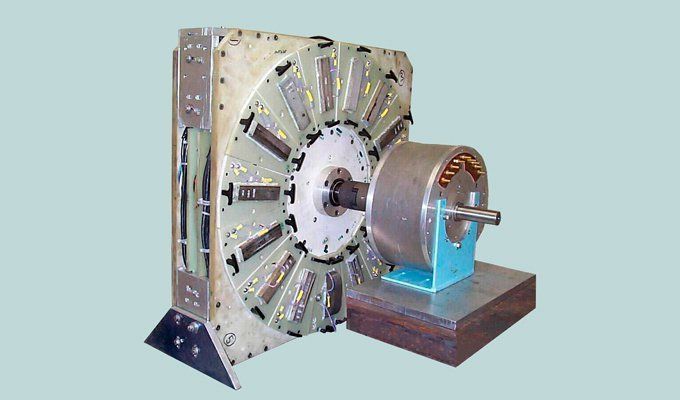 Хотя раньше для этих целей применялись управляемые напряжением генераторы или пограммируемые делители частоты. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе практически любого микроконтроллера. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответствено значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Хотя раньше для этих целей применялись управляемые напряжением генераторы или пограммируемые делители частоты. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе практически любого микроконтроллера. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответствено значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Для наиболее общего случая требуется знать зависимость длительности шага от текущей скорости. Количество шагов, которое осуществляет двигатель при разгоне за время t равно:
N = 1/2At2+Vt, где N – число шагов, t – время, V – скорость, выраженная в шагах в единицу времени, A – ускорение, выраженное в шагах, деленных на время в квадрате.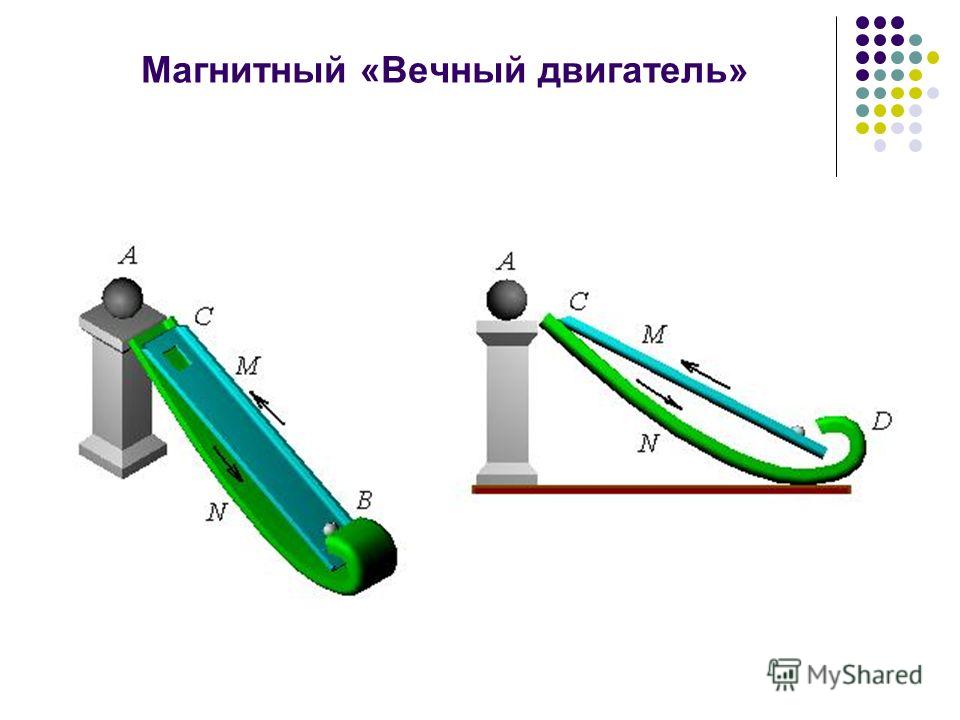
Для одного шага N = 1, тогда длительность шага t1 = T = (-V+(V2+2A)0.5)/A
В результате осуществления шага скорость становится равной Vnew = (V2+2A)0.5
Вычисления по приведенным формулам довольно трудоемки и требуют значительных затрат процессорного времени. В то же время, они позволяют изменять значение ускорения в произвольный момент. Расчеты можно существенно упростить, если потребовать постоянства ускорения во время разгона и торможения. В этом случае можно записать зависимость длительности шага от времени разгона:
V = V0+At, где V – текущая скорость, V0 – начальная скорость (минимальная скорость, с которой начинается разгон), A – ускорение;
1/T = 1/T0+At, где T – длительность шага, T0 – начальная длительность шага, t – текущее время;
Откуда T = T0/(1+T0At)
Вычисления по этой формуле осуществить значительно проще, однако для того, чтобы поменять значение ускорения, требуется остановить двигатель.
Резонанс
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.
Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что систему ротор – магнитное поле – статор можно рассматривать как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной конфигурации магнитного поля, резонансная частота ротора зависит от амплитуды колебаний. При уменьшении амплитуды частота растет, приближаясь к малоамплитудной частоте, которая более просто вычисляется количественно. Эта частота зависит от угла шага и от отношения момента удержания к моменту инерции ротора. Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Резонансная частота вычисляется по формуле:
F0 = (N*TH/(JR+JL))0.5/4*pi,
где F0 – резонансная частота,
N – число полных шагов на оборот,
TH – момент удержания для используемого способа управления и тока фаз,
JR – момент инерции ротора,
JL – момент инерции нагрузки.
Необходимо заметить, что резонансную частоту определяет момент инерции собственно ротора двигателя плюс момент инерции нагрузки, подключенной к валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая иногда приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
На практике эффект резонанса приводит к трудностям при работе на частоте, близкой к резонансной. Момент на частоте резонанса равен нулю и без принятия специальных мер шаговый двигатель не может при разгоне пройти резонансную частоту. В любом случае, явление резонанса способно существенно ухудшить точностные характеристики привода.
В системах с низким демпфированием существует опасность потери шагов или повышения шума, когда двигатель работает вблизи резонансной частоты. В некоторых случаях проблемы могут возникать и на гармониках частоты основного резонанса.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0. 1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Для борьбы с резонансом можно использовать различные методы. Например, применение эластичных материалов при выполнении механических муфт связи с нагрузкой. Эластичный материал способствует поглощению энергии в резонансной системе, что приводит к затуханию паразитных колебаний. Другим способом является применение вязкого трения. Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного вязкой кремнийорганической смазкой, может вращаться металлический диск. При вращении этой системы с ускорением диск испытывает вязкое трение, что эффективно демпфирует систему.
Существуют электрические методы борьбы с резонансом. Колеблющийся ротор приводит к возникновению в обмотках статора ЭДС. Если закоротить обмотки, которые на данном шаге не используются, это приведет к демпфированию резонанса.
И, наконец, существуют методы борьбы с резонансом на уровне алгоритма работы драйвера.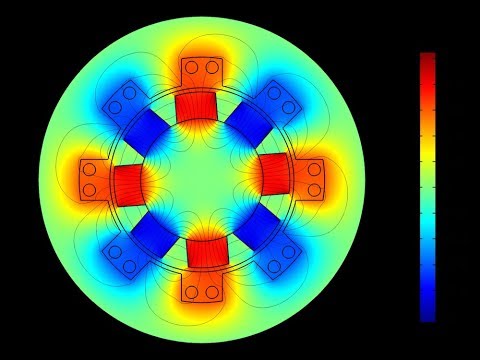 Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы.
Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы.
Если это возможно, при старте и остановке нужно использовать частоты выше резонансной. Увеличение момента инерции системы ротор-нагрузка уменьшает резонансную частоту.
Однако, самой эффективной мерой для борьбы с резонансом является применение микрошагового режима.
Чем же его кормить?
Для питания обычного двигателя постоянного тока требуется лишь источник постоянного напряжения, а необходимые коммутации обмоток выполняются коллектором. С шаговым двигателем всё сложнее. Все комутации должен выполнять внешний контроллер. В настоящее время примерно в 95% случаев для управления шаговыми двигателями используются микроконтроллеры. В простейшем случае для управления шаговым двигателем в полношаговом режиме требуются всего два сигнала, сдвинутые по фазе на 90 градусов. Направление вращения зависит от того, какая фаза опережает. Скорость определяется часотой следования импульсов. В полушаговом режиме всё несколько сложнее и требуется уже минимум 4 сигнала. Все сигналы управления шаговым двигателем можно сформировать программно, однако это вызовет большую загрузку микроконтроллера. Поэтому чаще применяют специальные микросхемы драйверов шагового двигателя, которые уменьшают количество требуемых от процессора динамических сигналов. Типично эти микросхемы требуют тактовую частоту, которая является частотой повторения шагов и статический сигнал, который задает направление. Иногда еще присутствует сигнал включения полушагового режима. Для микросхем драйверов, которые работают в микрошаговом режиме, требуется большее количество сигналов. Распространенным является случай, когда необходимые последовательности сигналов управления фазами формируются с помощью одной микросхемы, а необходимые токи фаз обеспечивает другая микросхема. Хотя в последнее время появляется все больше драйверов, реализующих все функции в одной микросхеме.
Направление вращения зависит от того, какая фаза опережает. Скорость определяется часотой следования импульсов. В полушаговом режиме всё несколько сложнее и требуется уже минимум 4 сигнала. Все сигналы управления шаговым двигателем можно сформировать программно, однако это вызовет большую загрузку микроконтроллера. Поэтому чаще применяют специальные микросхемы драйверов шагового двигателя, которые уменьшают количество требуемых от процессора динамических сигналов. Типично эти микросхемы требуют тактовую частоту, которая является частотой повторения шагов и статический сигнал, который задает направление. Иногда еще присутствует сигнал включения полушагового режима. Для микросхем драйверов, которые работают в микрошаговом режиме, требуется большее количество сигналов. Распространенным является случай, когда необходимые последовательности сигналов управления фазами формируются с помощью одной микросхемы, а необходимые токи фаз обеспечивает другая микросхема. Хотя в последнее время появляется все больше драйверов, реализующих все функции в одной микросхеме.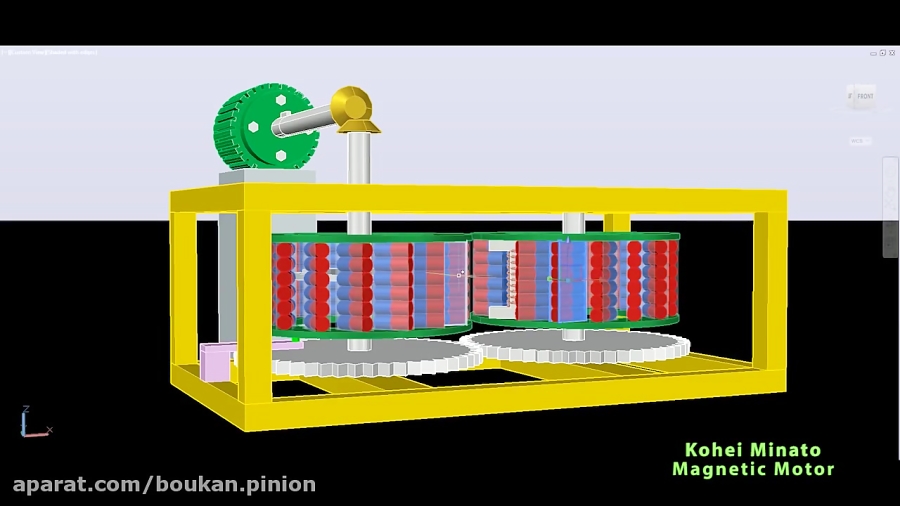
Мощность, которая требуется от драйвера, зависит от размеров двигателя и составляет доли ватта для маленьких двигателей и до 10-20 ватт для больших двигателей. Максимальный уровень рассеиваемой мощности ограничен нагревом двигателя. Максимальная рабочая температура обычно указывается производителем, но можно приблизительно считать, что нормальной является температура корпуса 90 градусов. Поэтому при конструировании устройств с шаговыми двигателями, непрерывно работающими на максимальном токе, необходимо принимать меры, исключающие касание корпуса двигателя обслуживающим персоналом. В отдельных случаях возможно применение охлаждающего радиатора. Иногда это позволяет применить двигатель меньших размеров и добиться лучшего отношения мощность/стоимость.
Для данного размера шагового двигателя место, занимаемое обмотками, ограничено. Поэтому очень важно сконструировать драйвер так, чтобы для данных параметров обмоток обеспечить наилучшую эффективность.
Схема драйвера должна выполнять три главных задачи:
- иметь возможность включать и выключать ток в обмотках, а также менять его направление
- поддерживать заданное значение тока
- обеспечивать как можно более быстрое нарастание и спад тока для хороших скоростных характеристик
Способы изменения направления тока
При работе шагового двигателя требуется изменение направления магнитного поля независимо для каждой фазы. Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы (рис. 18).
Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы (рис. 18).
Рис. 18. Питание обмотки униполярного двигателя.
В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для такой переполюсовки требуется полный H-мост (рис. 19). Управление ключами в том и другом случае должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение.
Рис. 19. Питание обмотки биполярного двигателя.
Это простейший способ управления током обмоток, и как будет показано в дальнейшем, он существенно ограничивает возможности двигателя. Нужно отметить, что при раздельном управлении транзисторами H-моста возможны ситуации, когда источник питания закорочен ключами. Поэтому логическая схема управления должна быть построена таким образом, чтобы исключить эту ситуацию даже в случае сбоев управляющего микроконтроллера.
Поэтому логическая схема управления должна быть построена таким образом, чтобы исключить эту ситуацию даже в случае сбоев управляющего микроконтроллера.
Обмотки двигателя представляют собой индуктивность, а это значит, что ток не может бесконечно быстро нарастать или бесконечно быстро спадать без привлечения бесконечной разности потенциалов. При подключении обмотки к источнику питания ток будет с некоторой скоростью нарастать, а при отключении обмотки произойдет выброс напряжения. Этот выброс способен повредить ключи, в качестве которых используются биполярные или полевые транзисторы. Для ограничения этого выброса устанавливают специальные защитные цепочки. На схемах рис. 18 и 19 эти цепочки образованы диодами, значительно реже применяют конденсаторы или их комбинацию с диодами. Применение конденсаторов вызывает появление электрического резонанса, что может вызвать увеличение момента на некоторой скорости. На рис. 18 потребовалось 4 диода по той причине, что половинки обмоток униполярного двигателя расположены на общем сердечнике и сильно связаны между собой. Они работают как автотрансформатор и выбросы возникают на выводах обеих обмоток. Если в качестве ключей применены МОП-транзисторы, то достаточно только двух внешних диодов, так как у них внутри уже имеются диоды. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются такие диоды. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами.
Они работают как автотрансформатор и выбросы возникают на выводах обеих обмоток. Если в качестве ключей применены МОП-транзисторы, то достаточно только двух внешних диодов, так как у них внутри уже имеются диоды. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются такие диоды. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами.
Стабилизация тока
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в полушаговом режиме ещё требуется в определенные моменты обеспечивать нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется задание разных значений тока.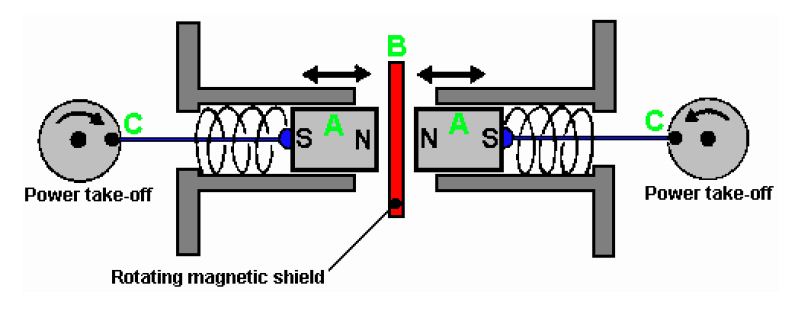
Для каждого двигателя производителем указывается номинальное рабочее напряжение обмоток. Поэтому простейший способ питания обмоток – это использование источника постоянного напряжения. В этом случае ток ограничен омическим сопротивлением обмоток и напряжением источника питания (рис. 20а), поэтому такой способ питания называют L/R-питанием. Ток в обмотке нарастает по экспоненциальному закону со скоростью, определяемой индуктивностью, активным сопротивлением обмотки и приложенным напряжением. При повышении частоты ток не достигает номинального значения и момент падает. Поэтому такой способ питания пригоден только при работе на малых скоростях и используется на практике только для маломощных двигателей.
Рис. 20. Питание обмотки номинальным напряжением (а) и использование ограничительного резистора (б).
При работе на больших скоростях требуется увеличивать скорость нарастания тока в обмотках, что возможно путем повышения напряжения источника питания. При этом максимальный ток обмотки должен быть ограничен с помощью дополнительного резистора. Например, если используется напряжение питание в 5 раз большее номинального, то требуется такой дополнительный резистор, чтобы общее сопротивление составило 5R, где R – омическое сопротивление обмотки (L/5R-питание). Этот способ питания обеспечивает более быстрое нарастание тока и как следствие, больший момент (рис. 20б). Однако он имеет существенный недостаток: на резисторе рассеивается дополнительная мощность. Большие габариты мощных резисторов, необходимость отвода тепла и повышенная необходимая мощность источника питания – всё это делает такой метод неэффективным и ограничивает область его применение небольшими двигателями мощностью 1 – 2 ватта. Нужно сказать, что до начала 80-х годов прошлого века параметры шаговых двигателей, приводимые производителями, относились именно к такому способу питания.
Например, если используется напряжение питание в 5 раз большее номинального, то требуется такой дополнительный резистор, чтобы общее сопротивление составило 5R, где R – омическое сопротивление обмотки (L/5R-питание). Этот способ питания обеспечивает более быстрое нарастание тока и как следствие, больший момент (рис. 20б). Однако он имеет существенный недостаток: на резисторе рассеивается дополнительная мощность. Большие габариты мощных резисторов, необходимость отвода тепла и повышенная необходимая мощность источника питания – всё это делает такой метод неэффективным и ограничивает область его применение небольшими двигателями мощностью 1 – 2 ватта. Нужно сказать, что до начала 80-х годов прошлого века параметры шаговых двигателей, приводимые производителями, относились именно к такому способу питания.
Еще более быстрое нарастание тока можно получить, если использовать для питания двигателя генератор тока. Нарастание тока будет происходить линейно, это позволит быстрее достигать номинального значения тока. Тем более, что пара мощных резисторов может стоить дороже, чем пара мощных транзисторов вместе с радиаторами. Но как и в предыдущем случае, генератор тока будет рассеивать дополнительную мощность, что делает эту схему питания неэффективной.
Тем более, что пара мощных резисторов может стоить дороже, чем пара мощных транзисторов вместе с радиаторами. Но как и в предыдущем случае, генератор тока будет рассеивать дополнительную мощность, что делает эту схему питания неэффективной.
Существует еще одно решение, обеспечивающее высокую скорость нарастания токи и низкую мощность потерь. Основано оно на применении двух источников питания.
Рис. 21. Питание обмотки двигателя ступенчатым напряжением.
В начале каждого шага кратковременно обмотки подключаются к более высоковольтному источнику, который обеспечивает быстрое нарастание тока (рис. 21). Затем напряжение питания обмоток уменьшается (момент времени t1 на рис. 21). Недостатком этого метода является необходимость двух ключей, двух источников питания и более сложной схемы управления. В системах, где такие источники уже есть, метод может оказаться достаточно дешёвым. Еще одной трудностью является невозможность определения момента времени t1 для общего случая. Для двигателя с меньшей индуктивностью обмоток скорость нарастания тока выше и при фиксированном t1 средний ток может оказаться выше номинального, что чревато перегревом двигателя.
Для двигателя с меньшей индуктивностью обмоток скорость нарастания тока выше и при фиксированном t1 средний ток может оказаться выше номинального, что чревато перегревом двигателя.
Еще одним методом стабилизации тока в обмотках двигателя является ключевое (широтно-импульсное) регулирование. Современные драйверы шаговых двигателей используют именно этот метод. Ключевой стабилизатор обеспечивает высокую скорость нарастания тока в обмотках вместе с простотой его регулирования и очень низкими потерями. Еще одним преимуществом схемы с ключевой стабилизацией тока является и то, что она поддерживает момент двигателя постоянным, независимо от колебаний напряжения питания. Это позволяет использовать простые и дешевые нестабилизированные источники питания.
Для обеспечения высокой скорости нарастания тока используют напряжение источника питания, в несколько раз превышающее номинальное. Путем регулировки скважности импульсов, среднее напряжение и ток поддерживаются на номинальном для обмотки уровне. Поддержание производится в результате действия обратной связи. Последовательно с обмоткой включается резистор – датчик тока R (рис. 22а). Падение напряжения на этом резисторе пропорционально току в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
Поддержание производится в результате действия обратной связи. Последовательно с обмоткой включается резистор – датчик тока R (рис. 22а). Падение напряжения на этом резисторе пропорционально току в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
Рис. 22. Различные схемы ключевой стабилизации тока.
Управляя величиной Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Можно также задавать его с помощью ЦАП в форме синусоиды, реализуя таким образом микрошаговый режим. Такой способ управления ключевым транзистором обеспечивает постоянную величину пульсаций тока в обмотке, которая определяется гистерезисом компаратора. Однако частота переключений будет зависеть от скорости изменения тока в обмотке, в частности, от ее индуктивности и от напряжения питания. Кроме того, две такие схемы, питающие разные фазы двигателя, не могут быть засинхронизированы что может явится причиной дополнительных помех.
Кроме того, две такие схемы, питающие разные фазы двигателя, не могут быть засинхронизированы что может явится причиной дополнительных помех.
От указанных недостатков свободна схема с постоянной частотой переключения (рис. 22б). Ключевым транзистором управляет триггер, который устанавливается специальным генератором. Когда триггер устанавливается, ключевой транзистор открывается и ток фазы начинает расти. Вместе с ним растет и падение напряжения на датчике тока. Когда оно достигает опорного напряжения, компаратор переключается, сбрасывая триггер. Ключевой транзистор при этом выключается и ток фазы начинает спадать до тех пор, пока триггер не будет вновь установлен генератором. Такая схема обеспечивает постоянную частоту коммутации, однако величина пульсаций тока не будет постоянной. Частота генератора обычно выбирается не менее 20кГц, чтобы двигатель не создавал слышимого звука. В то же время слишком высокая частота переключений может вызвать повышенные потери в сердечнике двигателя и потери на переключениях транзисторов. Хотя потери в сердечнике с повышением частоты растут не так быстро ввиду уменьшения амплитуды пульсаций тока с ростом частоты. Пульсации порядка 10% от среднего значения тока обычно не вызывают проблем с потерями.
Хотя потери в сердечнике с повышением частоты растут не так быстро ввиду уменьшения амплитуды пульсаций тока с ростом частоты. Пульсации порядка 10% от среднего значения тока обычно не вызывают проблем с потерями.
Подобная схема реализована внутри микросхемы L297 фирмы SGS-Thomson, применение которой сводит к минимуму количество внешних компонентов. Ключевое регулирование реализуют и другие специализированные микросхемы.
Рис. 23. Форма тока в обмотках двигателя для различных способов питания.
На рис. 23 показана форма тока в обмотках двигателя для трех способов питания. Наилучшим в смысле момента является ключевой метод. К тому же он обеспечивает высокий КПД и позволяет просто регулировать величину тока.
Быстрый и медленный спад тока
На рис. 19 были показаны конфигурации ключей в H-мосту для включения разных направлений тока в обмотке. Для выключения тока можно выключить все ключи H-моста или же оставить один ключ включенным (рис. 24). Эти две ситуации различаются по скорости спада тока в обмотке. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС самоиндукции, имеющая противоположное источнику питания направление. При использовании транзисторов в качестве ключей необходимо использовать шунтирующие диоды, чтобы обеспечить проводимость в обе стороны. Скорость изменения тока в индуктивности пропорциональна приложенному напряжению. Это справедливо как для нарастания тока, так и для его спада. Только в первом случае источником энергии является источник питания, а во втором сама индуктивность отдает запасенную энергию. Этот процесс может происходить при разных условиях.
Эти две ситуации различаются по скорости спада тока в обмотке. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС самоиндукции, имеющая противоположное источнику питания направление. При использовании транзисторов в качестве ключей необходимо использовать шунтирующие диоды, чтобы обеспечить проводимость в обе стороны. Скорость изменения тока в индуктивности пропорциональна приложенному напряжению. Это справедливо как для нарастания тока, так и для его спада. Только в первом случае источником энергии является источник питания, а во втором сама индуктивность отдает запасенную энергию. Этот процесс может происходить при разных условиях.
Рис. 24. Медленный и быстрый спад тока.
На рис. 24а показано состояние ключей H-моста, когда обмотка включена. Включены ключи A и D, направление тока показано стрелкой. На рис. 24б обмотка выключена, но ключ A включен. ЭДС самоиндукции закорачивается через этот ключ и диод VD3. В это время на выводах обмотки будет небольшое напряжение, равное прямому падению на диоде плюс падение на ключе (напряжение насыщения транзистора). Так как напряжение на выводах обмотки мало, малой будет и скорость изменения тока. Соответственно малой будет и скорость спадания магнитного поля. А это значит, еще некоторое время статор двигателя будет создавать магнитное поле, которого в это время быть не должно. На вращающийся ротор это поле будет оказывать тормозящее воздействие. При высоких скоростях работы двигателя этот эффект может серъезно помешать нормальной работе двигателя. Быстрое спадание тока при выключении является очень важным для высокоскоростных контроллеров, работающих в полушаговом режиме.
Так как напряжение на выводах обмотки мало, малой будет и скорость изменения тока. Соответственно малой будет и скорость спадания магнитного поля. А это значит, еще некоторое время статор двигателя будет создавать магнитное поле, которого в это время быть не должно. На вращающийся ротор это поле будет оказывать тормозящее воздействие. При высоких скоростях работы двигателя этот эффект может серъезно помешать нормальной работе двигателя. Быстрое спадание тока при выключении является очень важным для высокоскоростных контроллеров, работающих в полушаговом режиме.
Возможен и другой способ отключения тока обмотки, когда размыкаются все ключи H-моста (рис 24в). При этом ЭДС самоиндукции закорачивается чрез диоды VD2, VD3 на источник питания. Это значит, что во время спада тока на обмотке будет напряжение, равное сумме напряжения источника питания и прямого падения на двух диодах. По сравнению с первым случаем, это значительно большее напряжение. Соответственно, более быстрым будет спад тока и магнитного поля. Такое решение, использующее напряжение источника питания для ускорения спада тока является наиболее простым, но не единственным. Нужно сказать, что в ряде случаев на источнике питания могут появится выбросы, для подавления которых понадобятся специальные демферные цепочки. Безразлично, каким способом обеспечивается на обмотке повышенное напряжение во время спада тока. Для этого можно применить стабилитроны или варисторы. Однако на этих элементах будет рассеиваться дополнительная мощность, которая в первом случае отдавалась обратно в источник питания.
Такое решение, использующее напряжение источника питания для ускорения спада тока является наиболее простым, но не единственным. Нужно сказать, что в ряде случаев на источнике питания могут появится выбросы, для подавления которых понадобятся специальные демферные цепочки. Безразлично, каким способом обеспечивается на обмотке повышенное напряжение во время спада тока. Для этого можно применить стабилитроны или варисторы. Однако на этих элементах будет рассеиваться дополнительная мощность, которая в первом случае отдавалась обратно в источник питания.
Для униполярного двигателя ситуация более сложная. Дело в том, что половинки обмотки, или две отдельных обмотки одной фазы сильно связаны между собой. В результате этой связи на закрывающемся транзисторе будут иметь место выбросы повышенной амплитуды. Поэтому транзисторы должны быть защищены специальными цепочками. Эти цепочки для обеспечения быстрого спада тока должны обеспечивать довольно высокое напряжение ограничения. Чаще всего применяются диоды вместе со стабилитронами или варисторы. Один из способов схемотехнической реализации показан на рис. 25.
Один из способов схемотехнической реализации показан на рис. 25.
Рис. 25. Пример реализации быстрого спада тока для униполярного двигателя.
При ключевом регулировании величина пульсаций тока зависит от скорости его спада. Здесь возможны разные вырианты.
Если обеспечить закорачивание обмотки диодом, будет реализован медленный спад тока. Это приводит к уменьшению амплитуды пульсаций тока, что является весьма желательным, особенно при работе двигателя в микрошаговом режиме. Для данного уровня пульсаций медленный спад тока позволяет работать на более низких частотах ШИМ, что уменьшает нагрев двигателя. По этим причинам медленный спад тока широко используется. Однако существует несколько причин, по которым медленное нарастание тока не всегда является оптимальным: во-первых, из-за отрицательной обратной ЭДС, ввиду малого напряжения на обмотке во время спада тока, реальный средний ток обмотки может оказаться завышенным; во-вторых, когда требуется резко уменьшить ток фазы (например, в полушаговом режиме), медленный спад не позволит сделать это быстро; в-третьих, когда требуется установить очень низкое значение тока фазы, регулирование может нарушится ввиду существования ограничения на минимальное время включенного состояния ключей.
Высокая скорость спада тока, которая реализуется путем замыкания обмотки на источник питания, приводит к повышенным пульсациям. Вместе с тем, устраняются недостатки, свойственные медленному спаду тока. Однако при этом точность поддержания среднего тока меньше, также больше потери.
Наиболее совершенные микросхемы драйверов имеют возможность регулировать скорость спада тока.
Практическая реализация драйверов
Драйвер шагового двигателя должен решать две основные задачи: это формирование необходимых временных последовательностей сигналов и обеспечение необходимого тока в обмотках. В интегральных реализациях иногда эти задачи выполняются разными микросхемами. Примером может служить комплект микросхем L297 и L298 фирмы SGS-Thomson. Микросхема L297 содержит логику формирования временных последовательностей, а L298 представляет собой мощный сдвоенный H-мост. К сожалению, существует некоторая путаница в терминологии относительно подобных микросхем. Понятие «драйвер» часто применяют ко многим микросхемам, даже если их функции сильно различаются. Иногода микросхемы логики называют «трансляторами». В этой статье далее будет использоваться следующая терминология: «контроллер» — микросхема, ответственная за формирование временных последовательностей; «драйвер» — мощная схема питания обмоток двигателя. Однако термины «драйвер» и «контроллер» могут также обозначать законченное устройство управления шаговым двигателем. Необходимо отметить, что в последнее время все чаще контроллер и драйвер объединяются в одной микросхеме.
Иногода микросхемы логики называют «трансляторами». В этой статье далее будет использоваться следующая терминология: «контроллер» — микросхема, ответственная за формирование временных последовательностей; «драйвер» — мощная схема питания обмоток двигателя. Однако термины «драйвер» и «контроллер» могут также обозначать законченное устройство управления шаговым двигателем. Необходимо отметить, что в последнее время все чаще контроллер и драйвер объединяются в одной микросхеме.
На практике можно обойтись и без специализированных микросхем. Например, все функции контроллера можно реализовать программно, а в качестве драйвера применить набор дискретных транзисторов. Однако при этом микроконтроллер будет сильно загружен, а схема драйвера может получится громоздкой. Несмотря на это, в некоторых случаях такое решение будет экономически выгодным.
Самый простой драйвер требуется для управления обмотками униполярного двигателя. Для этого подходят простейшие ключи, в качестве которых могут быть использованы биполярные или полевые транзисторы.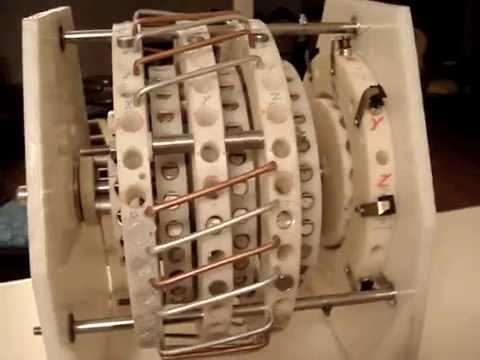 Достаточно эффективны мощные МОП-транзисторы, управляемые логическим уровнем, такие как IRLZ34, IRLZ44, IRL540. У них сопротивление в открытом состоянии менее 0.1ом и допустимый ток порядка 30А. Эти транзисторы имеют отечественные аналоги КП723Г, КП727В и КП746Г соответственно. Существуют также специальные микросхемы, которые содержат внутри несколько мощных транзисторных ключей. Примером может служить микросхема ULN2003 фирмы Allegro (наш аналог К1109КТ23), которая содержит 7 ключей с максимальным током 0.5 А. Принципиальная схема одной ячейки этой микросхемы приведена на рис. 26.
Достаточно эффективны мощные МОП-транзисторы, управляемые логическим уровнем, такие как IRLZ34, IRLZ44, IRL540. У них сопротивление в открытом состоянии менее 0.1ом и допустимый ток порядка 30А. Эти транзисторы имеют отечественные аналоги КП723Г, КП727В и КП746Г соответственно. Существуют также специальные микросхемы, которые содержат внутри несколько мощных транзисторных ключей. Примером может служить микросхема ULN2003 фирмы Allegro (наш аналог К1109КТ23), которая содержит 7 ключей с максимальным током 0.5 А. Принципиальная схема одной ячейки этой микросхемы приведена на рис. 26.
Рис. 26. Принципиальная схема одной ячейки микросхемы ULN2003.
Аналогичные микросхемы выпускаются многими фирмами. Необходимо отметить, что эти микросхемы пригодны не только для питания обмоток шаговых двигателей, но и для питания любых других нагрузок. Кроме простых микросхем драйверов существуют и более сложные микросхемы, имеющие встроенный контроллер, PWM-регулировку тока и даже ЦАП для микрошагового режима.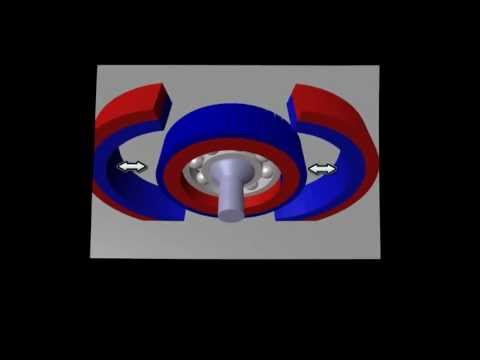
Как уже отмечалось ранее, для управления биполярными двигателями требуются более сложные схемы, такие как H-мосты. Такие схемы тоже можно реализовать на дискретных элементах, хотя в последнее время все чаще они реализуются на интегральных схемах. Пример дискретной реализации показан на рис. 27.
Рис. 27. Реализация мостового драйвера на дискретных компонентах.
Такой H-мост управляется с помощью двух сигналов, поэтому он не позволяет обеспечить всех возможных комбинаций. Обмотка запитана, когда уровни на входах разные и закорочена, когда уровни одинаковые. Это позволяет получить только медленный спад тока (динамическое торможение). Мостовые драйверы в интегральном исполнении выпускаются многими фирмами. Примером могут служить L293 (КР1128КТ3А) и L298 фирмы SGS-Thomson.
До недавнего времени большое количество микросхем для управления шаговыми двигателя выпускала фирма Ericsson. Однако 11 июня 1999 года она передала производство своих микросхем индустриального назначения фирме New Japan Radio Company (New JRC). При этом обозначения микросхем помянялись с PBLxxxx на NJMxxxx.
При этом обозначения микросхем помянялись с PBLxxxx на NJMxxxx.
Как простые ключи, так и H-мосты могут составлять часть ключевого стабилизатора тока. Схема управления ключами может быть выполнена на дискретных компонентах или в виде специализированной микросхемы. Довольно популярной микросхемой, реализующей ШИМ-стабилизацию тока, является L297 фирмы SGS-Thomson. Совместно с микросхемой мостового драйвера L293 или L298 они образуют законченную систему управления для шагового двигателя (рис. 28).
width=710><br><b><font color=red>Рисунок не помещается на странице и поэтому сжат!</font><br>Для того, чтобы просмотреть его полностью, щелкните <a href=/files/img/articles/rebooting/28.gif target=_blank>здесь</a>.</b><br>
Рис. 28. Типовая схема включения микросхем L297 и L298N.
Микросхема L297 сильно разгружает управляющий микроконтроллер, так как от него требуется только тактовая частота CLOCK (частота повторения шагов) и несколько статических сигналов: DIRECTION – направление (сигнал внутренне синхронизирован, переключать можно в любой момент), HALF/FULL – полушаговый/полношаговый режим, RESET – устанавливает фазы в исходное состояние (ABCD = 0101), ENABLE – разрешение работы микросхемы, V ref – опорное напряжение, которое задает пиковую величину тока при ШИМ-регулировании. Кроме того, имеется несколько дополнительных сигналов. Сигнал CONTROL задает режим работы ШИМ-регулятора. При его низком уровне ШИМ-регулирование происходит по выходам INh2, INh3, а при высоком – по выходам ABCD. SYNC – выход внутреннего тактового генератора ШИМ. Он служит для синхронизации работы нескольких микросхем. Также может быть использован как вход при тактировании от внешнего генератора. HOME – сигнал начального положения (ABCD = 0101). Он используется для синхронизации переключения режимов HALF/FULL. В зависимости от момента перехода в полношаговый режим микросхема может работать в режиме с одной включенной фазой или с двумя включенными фазами.
Кроме того, имеется несколько дополнительных сигналов. Сигнал CONTROL задает режим работы ШИМ-регулятора. При его низком уровне ШИМ-регулирование происходит по выходам INh2, INh3, а при высоком – по выходам ABCD. SYNC – выход внутреннего тактового генератора ШИМ. Он служит для синхронизации работы нескольких микросхем. Также может быть использован как вход при тактировании от внешнего генератора. HOME – сигнал начального положения (ABCD = 0101). Он используется для синхронизации переключения режимов HALF/FULL. В зависимости от момента перехода в полношаговый режим микросхема может работать в режиме с одной включенной фазой или с двумя включенными фазами.
Ключевое регулирование реализуют и многие другие микросхемы. Некоторые микросхемы обладают теми или иными особенностями, например драйвер LMD18T245 фирмы National Semiconductor не требует применения внешнего датчика тока, так как он реализован внутри на основе одной ячейки ключевого МОП-транзистора.
Некоторые микросхемы предназначены специально для работы в микрошаговом режиме. Примером может служить микросхема A3955 фирмы Allegro. Она имеет встроенный 3-битный нелинейный ЦАП для задания изменяющегося по синусоидальному закону тока фазы.
Примером может служить микросхема A3955 фирмы Allegro. Она имеет встроенный 3-битный нелинейный ЦАП для задания изменяющегося по синусоидальному закону тока фазы.
Рис. 29. Ток и вектор смещения ротора.
Смещение ротора в зависимомти от токов фаз, которые сформированы этим 3-битным ЦАПом, показано на рис. 29. Микросхема A3972 имеет встроенный 6-битный линейный ЦАП.
Выбор типа драйвера
Максимальный момент и мощность, которую может обеспечить на валу шаговый двигатель, зависит от размеров двигателя, условий охлаждения, режима работы (отношения работа/пауза), от параметров обмоток двигателя и от типа применяемого драйвера. Тип применяемого драйвера сильно влияет на мощность на валу двигателя. При одной и той же рассеиваемой мощности драйвер с импульсной стабилизацией тока обеспечивает выигрыш в моменте на некоторых скоростях до 5 – 6 раз, по сравнению с питанием обмоток номинальным напряжением. При этом также расширяется диапазон допустимых скоростей.
Технология приводов на основе шаговых двигателей постоянно развивается. Развитие направлено на получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностей, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
На практике немаловажным является и время разработки привода на основе шагового двигателя. Разработка специализированной конструкции для каждого конкретного случая требует значительных затрат времени. С этой точки зрения предпочтительней применять универсальные схемы управления на основе PWM стабилизации тока, несмотря на их более высокую стоимость.
Практический пример контроллера шагового двигателя на основе микроконтроллера семейства AVR
Несмотря на то, что в настоящее время существует большое количество специализированных микросхем для управления шаговыми двигателями, в отдельных случаях можно обойтись и без них. Когда не предъявляется слишком жестких требований, контроллер можно реализовать полностью программно. При этом стоимость такого контроллера получается очень низкой.
При этом стоимость такого контроллера получается очень низкой.
Предлагаемый контроллер предназначен для управления униполярным шаговым двигателем со средним током каждой обмотки до 2.5А. Контроллер может использоваться с распространенными шаговыми двигателями типа ДШИ-200-1, -2, -3. Его также можно использовать и для управления менее мощными двигателями, например теми, что применялись для позиционирования головок в 5-дюймовых дисководах. При этом схему можно упростить, отказавшись от параллельного включения ключевых транзисторов и от ключевой стабилизации тока, так как для маломощных двигателей достаточно простого L/R-питания.
width=710><br><b><font color=red>Рисунок не помещается на странице и поэтому сжат!</font><br>Для того, чтобы просмотреть его полностью, щелкните <a href=»/files/img/articles/rebooting/30.gif» target=_blank>здесь</a>.</b><br>
Рис.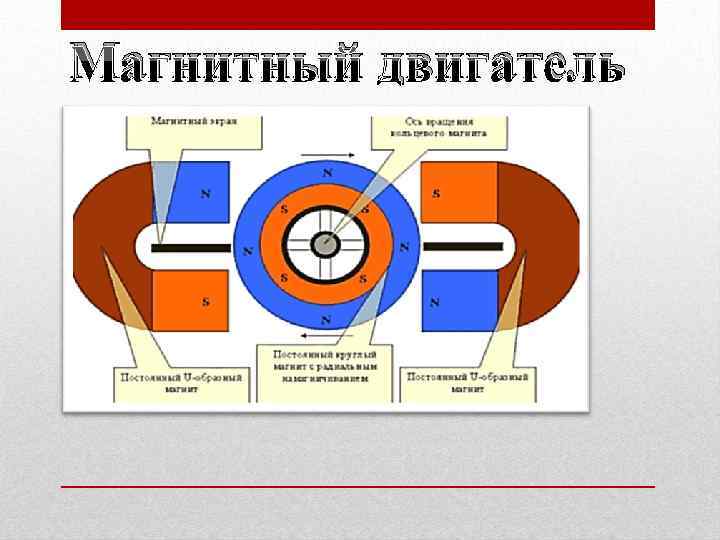 30. Принципиальная схема контроллера шагового двигателя.
30. Принципиальная схема контроллера шагового двигателя.
Основой устройства (рис. 30) является микроконтроллер U1 типа AT90S2313 фирмы Atmel. Сигналы управления обмотками двигателя формируются на портах PB4 – PB7 программно. Для коммутации обмоток используются по два включенных параллельно полевых транзистора типа КП505А, всего 8 транзисторов (VT1 – VT8). Эти транзисторы имеют корпус TO-92 и могут коммутировать ток до 1.4А, сопротивление канала составляет около 0.3 ома. Для того, чтобы транзисторы оставались закрытыми во время действия сигнала «сброс» микроконтроллера (порты в это время находятся в высокоимпедансном состоянии), между затворами и истоками включены резисторы R11 – R14. Для ограничения тока перезарядки емкости затворов установлены резисторы R6 – R9. Данный контроллер не претендует на высокие скоростные характеристики, поэтому вполне устраивает медленный спад тока фаз, который обеспечивается шунтированием обмоток двигателя диодами VD2 – VD5. Для подключения шагового двигателя имеется 8-контактный разъем XP3, который позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки (как, например, ДШИ-200). Для двигателей с внутренним соединением обмоток один или два общих контакта разъема останутся свободными.
Для двигателей с внутренним соединением обмоток один или два общих контакта разъема останутся свободными.
Необходимо отметить, что контроллер может быть использован для управления двигателем с большим средним током фаз. Для этого только необходимо заменить транзисторы VT1 – VT8 и диоды VD2 – VD5 более мощными. Причем в этом случае параллельное включение транзисторов можно не использовать. Наиболее подходящими являются МОП-транзисторы, управляемые логическим уровнем. Например, это КП723Г, КП727В и другие.
Стабилизация тока осуществляется с помощью ШИМ, которая тоже реализована программно. Для этого используются два датчика тока R15 и R16. Сигналы, снятые с датчиков тока, через ФНЧ R17C8 и R18C9 поступают на входы компараторов U3A и U3B. ФНЧ предотвращают ложные срабатывания компараторов вследствие действия помех. На второй вход каждого компаратора должно быть подано опорное напряжение, которое и определяет пиковый ток в обмотках двигателя. Это напряжение формируется микроконтроллером с помощью встроенного таймера, работающего в режиме 8-битной ШИМ. Для фильтрации сигнала ШИМ используется двухзвенный ФНЧ R19C10R22C11. Одновременно резисторы R19, R22 и R23 образуют делитель, который задает масштаб регулировки токов фаз. В данном случае максимальный пиковый ток, соответствующий коду 255, выбран 5.11А, что соответствует напряжению 0.511В на датчиках тока. Учитывая тот факт, что постоянная составляющая на выходе ШИМ меняется от 0 до 5В, необходимый коэффициент деления равен примерно 9.7. Выходы компараторов подключены к входам прерываний микроконтроллера INT0 и INT1.
Для фильтрации сигнала ШИМ используется двухзвенный ФНЧ R19C10R22C11. Одновременно резисторы R19, R22 и R23 образуют делитель, который задает масштаб регулировки токов фаз. В данном случае максимальный пиковый ток, соответствующий коду 255, выбран 5.11А, что соответствует напряжению 0.511В на датчиках тока. Учитывая тот факт, что постоянная составляющая на выходе ШИМ меняется от 0 до 5В, необходимый коэффициент деления равен примерно 9.7. Выходы компараторов подключены к входам прерываний микроконтроллера INT0 и INT1.
Для управления работой двигателя имеются два логических входа: FWD (вперед) и REW (назад), подключенных к разъему XP1. При подаче НИЗКОГО логического уровня на один из этих входов, двигатель начинает вращаться на заданной минимальной скорости, постепенно разгоняется с заданным постоянным ускорением. Разгон завершается, когда двигатель достигает заданной рабочей скорости. Если подается команда изменения направления вращения, двигатель с тем же ускорением тормозится, затем реверсируется и снова разгоняется.
Кроме командных входов, имеются два входа для концевых выключателей, подключенных к разъему XP2. Концевой выключатель считается сработавшим, если на соответствующем входе присутствует НИЗКИЙ логический уровень. При этом вращение в данном направлении запрещено. При срабатывании концевого выключателя во время вращения двигателя он переходит к торможению с заданным ускорением, а затем останавливается.
Командные входы и входы концевых выключателей защищены от перенапряжений цепочками R1VD6, R2VD7, R3VD8 и R4VD9, состоящими из резистора и стабилитрона.
Питание микроконтроллера формируется с помощью микросхемы стабилизатора 78LR05, которая одновременно выполняет функции монитора питания. При понижении напряжения питания ниже установленного порога эта микросхема формирует для микроконтроллера сигнал «сброс». Питание на стабилизатор подается через диод VD1, который вместе с конденсатором C6 уменьшает пульсации, вызванные коммутациями относительно мощной нагрузки, которой является шаговый двигатель. Питание на плату подается через 4-контактный разъем XP4, контакты которого задублированы.
Питание на плату подается через 4-контактный разъем XP4, контакты которого задублированы.
Демонстрационная версия программы позволяет осуществлять разгон и торможение двигателя с постоянным ускорением, а также вращение на постоянной скорости в полношаговом или полушаговом режиме. Эта программа содержит весь необходимый набор функций и может быть использована как базовая для написания специализированных программ. Поэтому имеет смысл рассмотреть ее структуру более подробно.
Главной задачей программы является формирование импульсных последовательностей для 4-х обмоток двигателя. Поскольку для этих последовательностей временные соотношения являются критичными, формирование выполняется в обработчике прерывания таймера 0. Можно сказать, основную работу программа делает именно в этом обработчике. Блок-схема обработчика приведена на рис. 31.
Рис. 31. Блок-схема обработчика прерывания таймера 0.
Несомненно, было бы удобнее использовать таймер 1, так как он 16-разрядный и способен вызывать периодические прерывания по совпадению с автоматическим обнулением. Однако он занят формированием с помощью ШИМ опорного напряжения для компараторов. Поэтому приходится перезагружать таймер 0 в прерывании, что требует некоторой корректировки загружаемой величины и вызывает некоторый джиттер, который, однако, на практике не мешает. В качестве основной временной базы выбран интервал 25мкс, который и формируется таймером. С такой дискретностью могут формироваться временные последовательности фаз, такой же период имеет и ШИМ стабилизации тока в фазах двигателя.
Однако он занят формированием с помощью ШИМ опорного напряжения для компараторов. Поэтому приходится перезагружать таймер 0 в прерывании, что требует некоторой корректировки загружаемой величины и вызывает некоторый джиттер, который, однако, на практике не мешает. В качестве основной временной базы выбран интервал 25мкс, который и формируется таймером. С такой дискретностью могут формироваться временные последовательности фаз, такой же период имеет и ШИМ стабилизации тока в фазах двигателя.
Для формирования периода повторения шагов используется программный 16-разрядный таймер STCNT. В отличие от таймера 0, его загрузочная величина не является константой, так как именно она определяет скорость вращения двигателя. Таким образом, переключение фаз происходит только при переполнении программного таймера.
Последовательность чередования фаз задана таблично. В памяти программ микроконтроллера имеются три разных таблицы: для полношагового режима без перекрытия фаз, полношагового с перекрытием и для полушагового режима. Все таблицы имеют одинаковую длину 8 байт. Нужная таблица в начале работы загружается в ОЗУ, что позволяет наиболее просто переходить между разными режимами работы двигателя. Выборка значений из таблицы происходит с помощью указателя PHASE, поэтому переключение направления вращения двигателя тоже осуществляется очень просто: для вращения вперед требуется инкрементировать указатель, а для вращения назад – декрементировать.
Все таблицы имеют одинаковую длину 8 байт. Нужная таблица в начале работы загружается в ОЗУ, что позволяет наиболее просто переходить между разными режимами работы двигателя. Выборка значений из таблицы происходит с помощью указателя PHASE, поэтому переключение направления вращения двигателя тоже осуществляется очень просто: для вращения вперед требуется инкрементировать указатель, а для вращения назад – декрементировать.
Самая «главная» переменная в программе – это 24-битная знаковая переменная VC, которая содержит значение текущей скорости. Знак этой переменной определяет направление вращения, а значение – частоту следования шагов. Нулевое значение этой переменной говорит о том, что двигатель остановлен. Программа в этом случае выключает ток всех фаз, хотя во многих приложениях в этой ситуации требуется оставить включенными текущие фазы и лишь несколько уменьшить их ток, обеспечив этим удержание положения двигателя. При необходимости такое изменение логики работы программы сделать очень просто.
Таким образом, в случае переполнения программного таймера STCNT происходит анализ значения переменной VC, в случае положительного значения указатель PHASE инкрементируется, а в случае отрицательного – декрементируется. Затем из таблицы выбирается очередная комбинация фаз, которая выводится в порт. В случае нулевого значения VC указатель PHASE не изменяется, и в порт выводятся все нулевые значения.
Величина T, которой следует загружать таймер STCNT, однозначно связана со значением переменной VC. Однако перевод частоты в период занимает довольно много времени, поэтому эти вычисления производятся в основной программе, и не на каждом шаге, а гораздо реже. Вообще, эти вычисления нужно периодически производить только во время разгона или торможения. В остальных случаях скорость, и, соответственно, период повторения шагов, не меняются.
Для осуществления ШИМ-стабилизации тока фазы должны периодически включаться, а затем, при достижении током заданного уровня, выключаться. Периодическое включение производится в прерывании таймера 0, для чего даже в случае отсутствия переполнения программного таймера STCNT в порт выводится текущая комбинация фаз. Происходит это с периодом 25мкс (что соответствует частоте ШИМ 40кГц). Выключением фаз управляют компараторы, выходы которых подключены к входам прерывания INT0 и INT1. Прерывания разрешаются после того, как ток фаз включается, и запрещаются сразу после переключения компараторов. Это исключает их повторную обработку. В обработчиках прерываний происходит только отключение соответствующих фаз (рис. 32).
Происходит это с периодом 25мкс (что соответствует частоте ШИМ 40кГц). Выключением фаз управляют компараторы, выходы которых подключены к входам прерывания INT0 и INT1. Прерывания разрешаются после того, как ток фаз включается, и запрещаются сразу после переключения компараторов. Это исключает их повторную обработку. В обработчиках прерываний происходит только отключение соответствующих фаз (рис. 32).
Рис. 32. Блок-схема обработчика прерываний INT0 и INT1.
Процессы, происходящие при ШИМ-стабилизации тока, показаны на рис. 33. Особо следует отметить, что ток в датчике тока имеет прерывистый характер даже в том случае, если ток обмотки не прерывается. Это связано тем, что во время спада тока его путь не проходит через датчик тока (а проходит через диод).
Рис. 33. Процесс ШИМ-стабилизации тока.
Нужно сказать, что аналоговая часть системы ШИМ-стабилизации тока фаз двигателя является довольно «капризной». Дело в том, что сигнал, снимаемый с датчика тока, содержит большое количество помех.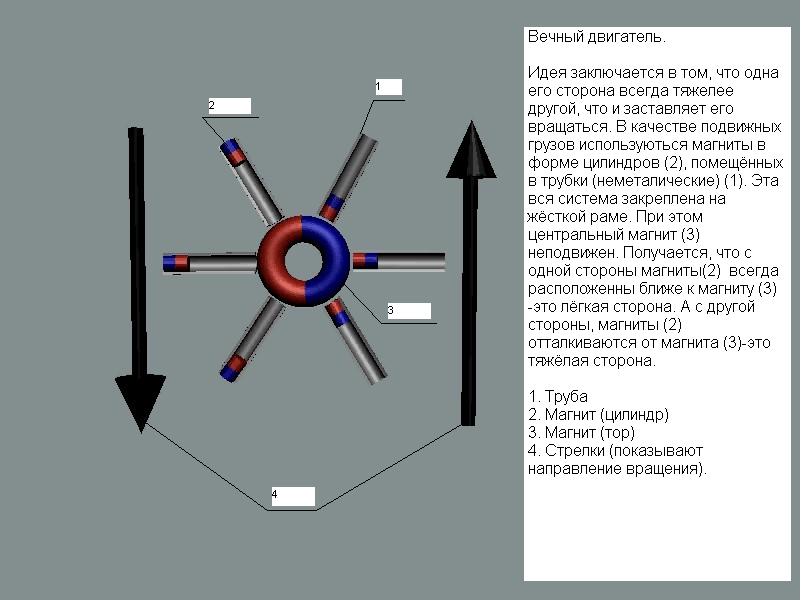 Помехи возникают в основном в моменты коммутации обмоток двигателя, причем как «своей», так и «чужой» фазы. Для правильной работы схемы требуется корректная разводка печатной платы, особенно это касается земляных проводников. Возможно, придется подобрать номиналы ФНЧ на входе компаратора или даже ввести в компаратор небольшой гистерезис. Как уже отмечалось выше, при управлении маломощными двигателями от ШИМ-стабилизации тока можно вовсе отказаться, применив обычную L/R-схему питания обмоток. Для исключения ШИМ-стабилизации достаточно просто не подключать входы INT0 и INT1 микроконтроллера, естественно, при этом можно вообще не устанавливать компаратор и датчики тока.
Помехи возникают в основном в моменты коммутации обмоток двигателя, причем как «своей», так и «чужой» фазы. Для правильной работы схемы требуется корректная разводка печатной платы, особенно это касается земляных проводников. Возможно, придется подобрать номиналы ФНЧ на входе компаратора или даже ввести в компаратор небольшой гистерезис. Как уже отмечалось выше, при управлении маломощными двигателями от ШИМ-стабилизации тока можно вовсе отказаться, применив обычную L/R-схему питания обмоток. Для исключения ШИМ-стабилизации достаточно просто не подключать входы INT0 и INT1 микроконтроллера, естественно, при этом можно вообще не устанавливать компаратор и датчики тока.
В данной программе периодичность вычисления новых значений скорости и периода выбрана равной 15.625мс. Такое значение выбрано не случайно. Этот интервал составляет 1/64с, а главное, он содержит целое число периодов переполнения таймера 0 (25мкс). Удобно, если значения скорости и ускорения задаются в естественных единицах, т. е. в шагах в секунду и в шагах, деленных на секунду в квадрате. Для того чтобы иметь возможность в целочисленной арифметике вычислять мгновенную скорость 64 раза в секунду, нужно перейти к внутреннему представлению скорости, увеличенному в 64 раза. Умножение и деление на 64 сводится к обычным сдвигам и поэтому требует очень мало времени. Заданную периодичность вычислений обеспечивает еще один программный таймер URCNT, который декрементируется в прерывании таймера 0 (раз в 25мкс). Этот таймер всегда загружается постоянной величиной, что обеспечивает неизменный период его переполнений, равный 15.625мс. При переполнении этого таймера устанавливается битовый флаг UPD, который сигнализирует основной программе, что «пора-бы обновить значения скорости и периода».
е. в шагах в секунду и в шагах, деленных на секунду в квадрате. Для того чтобы иметь возможность в целочисленной арифметике вычислять мгновенную скорость 64 раза в секунду, нужно перейти к внутреннему представлению скорости, увеличенному в 64 раза. Умножение и деление на 64 сводится к обычным сдвигам и поэтому требует очень мало времени. Заданную периодичность вычислений обеспечивает еще один программный таймер URCNT, который декрементируется в прерывании таймера 0 (раз в 25мкс). Этот таймер всегда загружается постоянной величиной, что обеспечивает неизменный период его переполнений, равный 15.625мс. При переполнении этого таймера устанавливается битовый флаг UPD, который сигнализирует основной программе, что «пора-бы обновить значения скорости и периода».
Основная программа (рис. 34) выполняет вычисление мгновенных значений скорости и периода следования шагов, обеспечивая необходимую кривую разгона. В данном случае разгон и торможение осуществляются с постоянным ускорением, поэтому скорость меняется линейно. Период при этом меняется по гиперболическому закону, и его вычисление – основная работа программы.
Период при этом меняется по гиперболическому закону, и его вычисление – основная работа программы.
Рис. 34. Блок-схема основного цикла программы.
Обновление значений скорости и периода следования шагов основная программа делает периодически, периодичность задается флагом UPD. Обновление программа делает на основе сравнения значений двух переменных: мгновенной скорости VC и требуемой скорости VR.
Значение требуемой скорости также определяется в основной программе. Это делается на основе анализа управляющих сигналов и сигналов с концевых выключателей. В зависимости от этих сигналов, основная программа загружает переменную VR значением требуемой скорости. В данной программе это V для движения вперед, -V для движения назад и 0 для остановки. В общем случае, набор скоростей (а также ускорений и токов фаз) может быть сколь угодно большим, в зависимости от требований.
Если скорости VC и VR равны, значит, шаговый двигатель работает в стационарном режиме и обновления не требуется. Если же скорости не равны, то значение VC с заданным ускорением приближается к VR, т.е. двигатель ускоряется (или замедляется) до достижения номинальной скорости. В случае, когда даже знаки VR и VC отличаются, двигатель замедляется, реверсируется и потом достигает требуемой скорости. Происходит это как-бы само собой, благодаря структуре программы.
Если же скорости не равны, то значение VC с заданным ускорением приближается к VR, т.е. двигатель ускоряется (или замедляется) до достижения номинальной скорости. В случае, когда даже знаки VR и VC отличаются, двигатель замедляется, реверсируется и потом достигает требуемой скорости. Происходит это как-бы само собой, благодаря структуре программы.
Если при очередной проверке обнаруживается, что скорости VR и VC не равны, то к значению VC прибавляется (или вычитается) значение ускорения A. Если в результате этой операции происходит превышение требуемой скорости, то полученное значение корректируется путем замены на точное значение требуемой скорости.
Затем происходит вычисление периода T (рис. 35).
Рис. 35. Блок-схема подпрограммы вычисления периода.
Вначале вычисляется модуль текущей скорости. Затем происходит ограничение минимальной скорости. Это ограничение необходимо по двум причинам. Во-первых, бесконечно малой скорости соответствует бесконечно большой период, что вызовет ошибку в вычислениях. Во-вторых, шаговые двигатели имеют довольно протяженную по скорости зону старта, поэтому нет необходимости стартовать на очень маленькой скорости, тем более что вращение на малых скоростях вызывает повышенный шум и вибрацию. Значение минимальной скорости VMIN должно выбираться исходя из конкретной задачи и типа двигателя. После ограничения минимальной скорости производится вычисление периода по формуле T = 2560000/|VC|. На первый взгляд формула не очевидна, но если учесть, что период необходимо получить в 25мкс-интервалах, а внутреннее представление VC – это умноженное на 64 ее истинное значение, то все становится на свои места. При вычислении T требуется операция беззнакового деления формата 24/24, которое AVR на тактовой частоте 10МГц делает примерно за 70мкс. Учитывая, что вычисления периода происходят не чаще, чем один раз в 15.625мс, загрузка процессора получается очень низкой. Основную загрузку производит прерывание таймера 0, да и оно в основном выполняется по короткой ветке (без переполнения STCNT) длительностью примерно 3мкс, что соответствует 12%-й загрузке процессора.
Во-вторых, шаговые двигатели имеют довольно протяженную по скорости зону старта, поэтому нет необходимости стартовать на очень маленькой скорости, тем более что вращение на малых скоростях вызывает повышенный шум и вибрацию. Значение минимальной скорости VMIN должно выбираться исходя из конкретной задачи и типа двигателя. После ограничения минимальной скорости производится вычисление периода по формуле T = 2560000/|VC|. На первый взгляд формула не очевидна, но если учесть, что период необходимо получить в 25мкс-интервалах, а внутреннее представление VC – это умноженное на 64 ее истинное значение, то все становится на свои места. При вычислении T требуется операция беззнакового деления формата 24/24, которое AVR на тактовой частоте 10МГц делает примерно за 70мкс. Учитывая, что вычисления периода происходят не чаще, чем один раз в 15.625мс, загрузка процессора получается очень низкой. Основную загрузку производит прерывание таймера 0, да и оно в основном выполняется по короткой ветке (без переполнения STCNT) длительностью примерно 3мкс, что соответствует 12%-й загрузке процессора. Это означает, что имеются значительные резервы вычислительных ресурсов.
Это означает, что имеются значительные резервы вычислительных ресурсов.
Печатная плата контроллера шагового двигателя приведена на рис. 36.
Рис. 36. Печатная плата контроллера шагового двигателя.
Приведенная демонстрационная программа не имеет многих функций, которые должны присутствовать в законченном контроллере шагового двигателя. Реализация этих функций сильно зависит от особенностей применения конкретного шагового двигателя и вряд ли может быть сделана универсальной. В то же время приведенная программа может служить основой для написания специальных программ, обладающих тем или иным набором возможностей. Например, на основе данной платы создан ряд специализированных контроллеров шаговых двигателей. Одна из моделей такого контроллера обладает следующими возможностями:
- максимальная частота коммутации фаз 3 Кгц
- разгон с постоянным ускорением
- программируемое направление вращения
- программируемое ускорение
- программируемый средний ток обмоток
- программируемый ток удержания
- режим перемещения на N шагов
- полушаговый режим
- формирователь импульса привязки с программируемой задержкой
- хранение основных параметров в энергонезависимой памяти
- один внешний источник питания
- управление по интерфейсу RS-232C или местное
- адресация до 7 устройств на одном RS-232C
Электродвигатель — Википедия, бесплатная энциклопедия
Взято из Википедии, бесплатная энциклопедия
Перейти к: навигация, поиск
Вращающееся магнитное поле как сумма магнитных векторов от 3-х фазных катушек.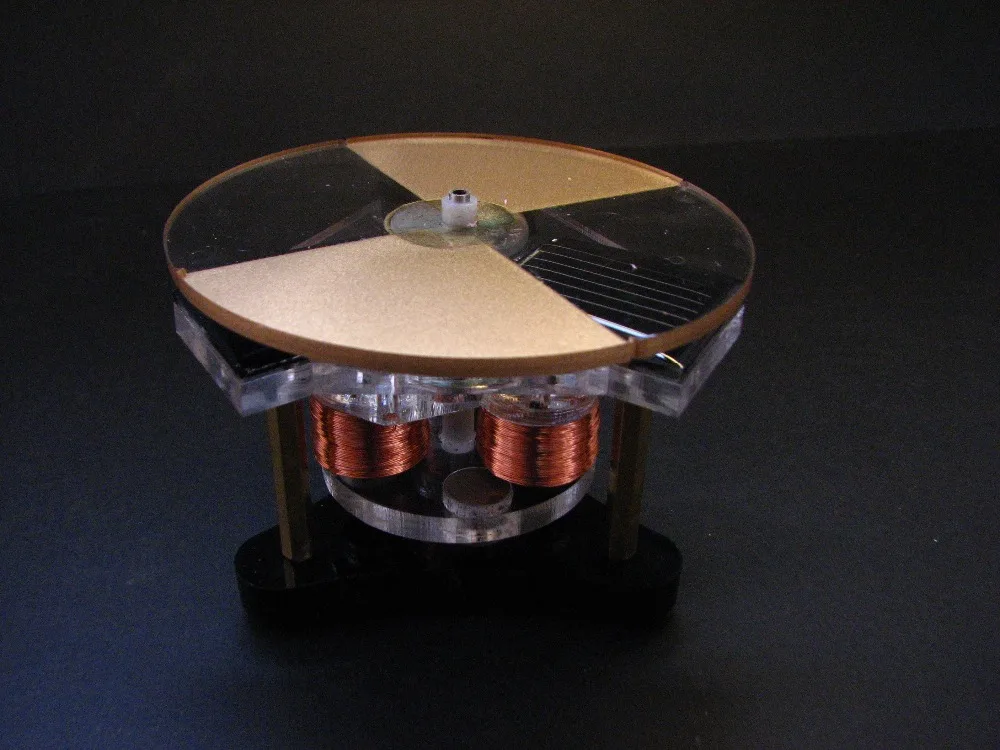
Электродвигатель преобразует электрическую энергию в механическое движение. Обратную задачу — преобразование механического движения в электрическую энергию — выполняет генератор или динамо-машина. Во многих случаях два устройства отличаются только своим приложением и незначительными деталями конструкции, а некоторые приложения используют одно устройство для выполнения обеих ролей. Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Содержимое
|
 3 Однофазные асинхронные двигатели переменного тока
3 Однофазные асинхронные двигатели переменного тока[править]
Операция
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой провод действует механическая сила, когда он проводит электричество, находясь в магнитном поле. Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю. Большинство магнитных двигателей являются роторными, но существуют и линейные типы. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть называется статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раме. Хотя эту раму часто называют арматурой, этот термин часто применяют ошибочно. Правильно якорем называется та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорем может служить либо ротор, либо статор.
Большинство магнитных двигателей являются роторными, но существуют и линейные типы. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть называется статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раме. Хотя эту раму часто называют арматурой, этот термин часто применяют ошибочно. Правильно якорем называется та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорем может служить либо ротор, либо статор.
[править]
Двигатели постоянного тока
Электродвигатели различных размеров.
Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью. Постоянный магнит помещали в середину бассейна с ртутью. Когда по проводу пропускали ток, провод вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируют на школьных уроках физики, но вместо токсичной ртути иногда используют рассол (соленую воду). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздней доработкой является колесо Барлоу.
Этот двигатель часто демонстрируют на школьных уроках физики, но вместо токсичной ртути иногда используют рассол (соленую воду). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздней доработкой является колесо Барлоу.
Еще одна ранняя конструкция электродвигателя использовала возвратно-поступательный плунжер внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, приводя его в действие как двигатель.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита. Поворотный переключатель, называемый коммутатором, дважды за цикл меняет направление электрического тока, чтобы течь через якорь, так что полюса электромагнита толкают и тянут постоянные магниты снаружи двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В этот момент переключения полярности инерция удерживает классический двигатель в правильном направлении. (См. схемы ниже.)
Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В этот момент переключения полярности инерция удерживает классический двигатель в правильном направлении. (См. схемы ниже.)
Простой электродвигатель постоянного тока. Когда на катушку подается питание, вокруг якоря создается магнитное поле. Левая сторона якоря отталкивается от левого магнита и тянется вправо, вызывая вращение.
Якорь продолжает вращаться.
Когда якорь становится горизонтально, коммутатор меняет направление тока через катушку на противоположное, меняя магнитное поле. Затем процесс повторяется.
[править]
Двигатель постоянного тока с полем обмотки
Постоянные магниты снаружи (статор) двигателя постоянного тока могут быть заменены электромагнитами. Изменяя ток возбуждения, можно изменить отношение скорости к крутящему моменту двигателя. Обычно обмотка возбуждения размещается последовательно (последовательная обмотка) с обмоткой якоря, чтобы получить низкоскоростной двигатель с высоким крутящим моментом, параллельно (шунтирующая обмотка) с якорем, чтобы получить высокоскоростной двигатель с низким крутящим моментом, или чтобы обмотка частично параллельно и частично последовательно (составная обмотка) для баланса, обеспечивающего постоянную скорость в диапазоне нагрузок. Дальнейшее снижение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Обычно обмотка возбуждения размещается последовательно (последовательная обмотка) с обмоткой якоря, чтобы получить низкоскоростной двигатель с высоким крутящим моментом, параллельно (шунтирующая обмотка) с якорем, чтобы получить высокоскоростной двигатель с низким крутящим моментом, или чтобы обмотка частично параллельно и частично последовательно (составная обмотка) для баланса, обеспечивающего постоянную скорость в диапазоне нагрузок. Дальнейшее снижение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
[править]
Управление скоростью
Вообще говоря, скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулирование скорости может быть достигнуто с помощью различных ответвлений батареи, переменного напряжения питания, резисторов или электронного управления. Направление двигателя постоянного тока с возбужденным полем можно изменить, поменяв местами соединения возбуждения или якоря, но не оба, обычно это делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять путем включения последовательного резистора или коммутационного устройства с электронным управлением, состоящего из тиристоров, транзисторов или, как это исторически сложилось, ртутных дуговых выпрямителей. В схеме, известной как прерыватель, среднее напряжение, подаваемое на двигатель, изменяется за счет очень быстрого переключения напряжения питания. Поскольку соотношение «включено» и «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Быстрое переключение потребляет меньше энергии, чем последовательные резисторы. Выходные фильтры сглаживают среднее напряжение, подаваемое на двигатель, и уменьшают шум двигателя.
Поскольку двигатель постоянного тока с последовательной обмоткой развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи. Другое применение – стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи). По мере того, как двигатель ускоряется, ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «слабое поле» в последнем разделе). Как следствие, скорость двигателя стремится к бесконечности, но двигатель разрушит себя, прежде чем он будет вращаться так быстро.
Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи). По мере того, как двигатель ускоряется, ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «слабое поле» в последнем разделе). Как следствие, скорость двигателя стремится к бесконечности, но двигатель разрушит себя, прежде чем он будет вращаться так быстро.
Одним из интересных методов управления скоростью двигателя постоянного тока был метод Ward-Leonard Control. Это метод управления двигателем постоянного тока (обычно с шунтовой или комбинированной обмоткой), который был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока, хотя он не лишен своих преимуществ в схемах постоянного тока. Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции). Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает очень хорошее управление скоростью от состояния покоя до полной скорости, а также постоянный крутящий момент. Этот метод управления был методом де-факто с момента его разработки до тех пор, пока его не вытеснили твердотельные тиристорные системы. Он нашел применение практически в любой среде, где требовался хороший контроль скорости, от пассажирских лифтов до больших подъемных механизмов шахты и даже промышленных технологических машин и электрических кранов. Его принципиальный недостаток заключался в том, что для реализации схемы требовалось 3 машины (5 в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих приложениях мотор-генераторная установка часто оставлялась постоянно включенной, чтобы избежать задержек, которые в противном случае были бы необходимы при ее запуске по мере необходимости.
Выход постоянного тока якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции). Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает очень хорошее управление скоростью от состояния покоя до полной скорости, а также постоянный крутящий момент. Этот метод управления был методом де-факто с момента его разработки до тех пор, пока его не вытеснили твердотельные тиристорные системы. Он нашел применение практически в любой среде, где требовался хороший контроль скорости, от пассажирских лифтов до больших подъемных механизмов шахты и даже промышленных технологических машин и электрических кранов. Его принципиальный недостаток заключался в том, что для реализации схемы требовалось 3 машины (5 в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих приложениях мотор-генераторная установка часто оставлялась постоянно включенной, чтобы избежать задержек, которые в противном случае были бы необходимы при ее запуске по мере необходимости.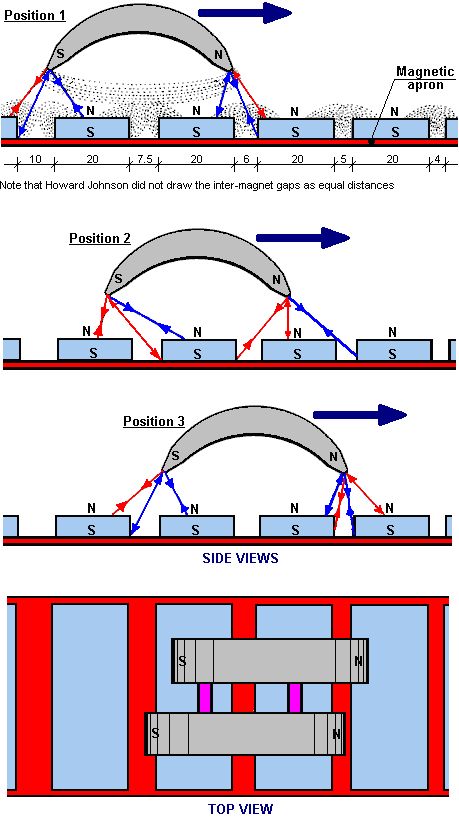 На момент написания (май 2006 г.) многие устаревшие установки Ward-Leonard все еще находились в эксплуатации.
На момент написания (май 2006 г.) многие устаревшие установки Ward-Leonard все еще находились в эксплуатации.
[править]
Универсальные двигатели
Вариант раневого поля Двигатель постоянного тока — универсальный двигатель . Название происходит от того факта, что он может использовать переменный или постоянный ток питания, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с возбужденным полем ток как в поле, так и в якоре (и, следовательно, в результирующих магнитных полях) будет чередоваться (обратная полярность) в одно и то же время, и, следовательно, создаваемая механическая сила всегда в одном и том же направлении. . На практике двигатель должен быть специально разработан для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и результирующий двигатель, как правило, менее эффективен, чем эквивалентный чистый Двигатель постоянного тока . Максимальная мощность универсальных двигателей, работающих на обычных частотах сети, ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного тягового железнодорожного двигателя. В этом приложении, чтобы поддерживать высокий электрический КПД, они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2/3 Гц. Поскольку это универсальные двигатели, локомотивы этой конструкции также обычно могли работать от третьего рельса, питаемого от постоянного тока.
Максимальная мощность универсальных двигателей, работающих на обычных частотах сети, ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного тягового железнодорожного двигателя. В этом приложении, чтобы поддерживать высокий электрический КПД, они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2/3 Гц. Поскольку это универсальные двигатели, локомотивы этой конструкции также обычно могли работать от третьего рельса, питаемого от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться с двигателями, которые имеют типичные характеристики двигателей постоянного тока, особенно высокий пусковой момент и очень компактную конструкцию, если используются высокие рабочие скорости. Отрицательным аспектом являются проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами. Непрерывное регулирование скорости универсального двигателя, работающего от сети переменного тока, очень легко осуществляется с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может осуществляться с помощью нескольких отводов на катушке возбуждения. Бытовые блендеры, которые рекламируют много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (заставляя двигатель работать на полуволновом постоянном токе с половиной среднеквадратичного напряжения сети переменного тока). линия).
Непрерывное регулирование скорости универсального двигателя, работающего от сети переменного тока, очень легко осуществляется с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может осуществляться с помощью нескольких отводов на катушке возбуждения. Бытовые блендеры, которые рекламируют много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (заставляя двигатель работать на полуволновом постоянном токе с половиной среднеквадратичного напряжения сети переменного тока). линия).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превысить один оборот за цикл сетевого тока. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Двигатели многих пылесосов и триммеров превышают 10 000 об/мин, Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об/мин. Теоретически универсальный двигатель, которому разрешено работать без механической нагрузки, будет работать с превышением скорости, что может привести к его повреждению. Однако в реальной жизни различные трения в подшипниках, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора предотвращают превышение скорости.
Однако в реальной жизни различные трения в подшипниках, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора предотвращают превышение скорости.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, которые ранее использовали универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для управления переменной скоростью.
Преимущества универсального двигателя и распределения переменного тока сделали установку системы распределения низкочастотного тягового тока экономичной для некоторых железнодорожных установок. На достаточно низких частотах производительность двигателя примерно такая же, как если бы двигатель работал на постоянном токе. Использовались частоты всего 16 2/3 Гц.
[править]
Двигатели переменного тока
Типичный двигатель переменного тока состоит из двух частей:
- Внешний неподвижный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому вращающееся поле придает крутящий момент.
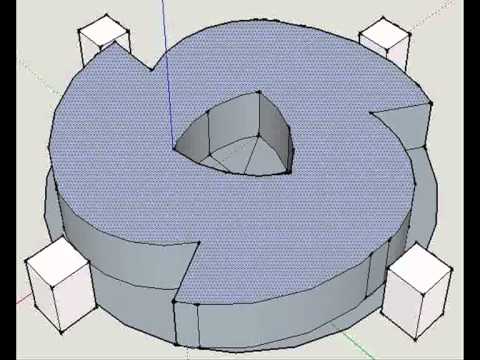
Существует два основных типа двигателей переменного тока в зависимости от типа используемого ротора:
- Синхронный двигатель, который вращается точно с частотой сети или с частотой, кратной частоте сети, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Принцип вращающегося магнитного поля, хотя его обычно приписывают Николе Тесле в 1882 году или около того, использовался такими учеными, как Майкл Фарадей в 1820-х годах, а позже Джеймс Клерк Максвелл. Однако Тесла использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. Михаэль фон Доливо-Добровльский изобрел первый современный трехфазный «клетка-ротор» в 189 году.0. Внедрение двигателя с 1888 г. положило начало так называемой Второй промышленной революции, сделавшей возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретенной Теслой (1888 г.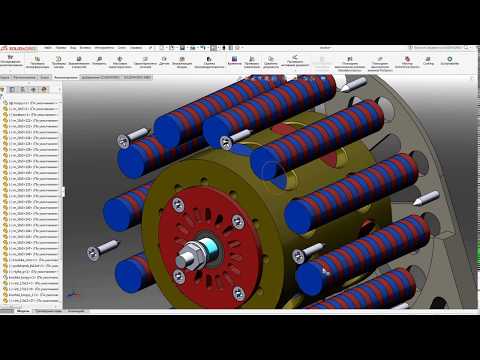 )[1]. Первая успешная коммерческая трехфазная система генерации и передачи на большие расстояния была разработана Алмерианом Декером в Милл-Крик № 1 [2] в Редлендсе, Калифорния [3].
)[1]. Первая успешная коммерческая трехфазная система генерации и передачи на большие расстояния была разработана Алмерианом Декером в Милл-Крик № 1 [2] в Редлендсе, Калифорния [3].
[править]
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателей компакт-дисков, игрушек и приводов CD/DVD, траверса головки
При наличии многофазного электропитания трехфазный (или многофазный) переменный ток асинхронный двигатель обычно используется, особенно для двигателей большей мощности. Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках ротора, который, в свою очередь, создает уравновешивающее магнитное поле, заставляющее ротор вращаться в направлении вращения поля.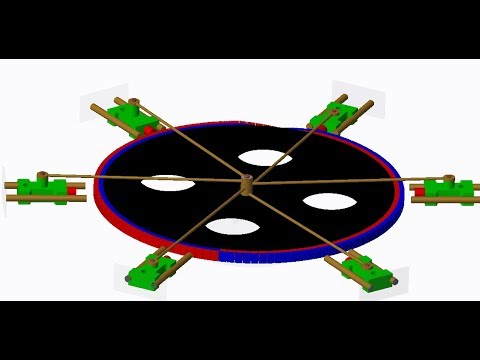 Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающего поля.
Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающего поля.
Асинхронные двигатели являются рабочими лошадками промышленности, а двигатели мощностью до 500 кВт выпускаются в строго стандартизированных размерах корпуса, что делает их почти полностью взаимозаменяемыми между производителями (хотя стандартные европейские и североамериканские размеры различаются). Очень большие синхронные двигатели имеют выходную мощность в десятки тысяч кВт для трубопроводных компрессоров и приводов аэродинамических труб.
В асинхронных двигателях используются роторы двух типов.
Роторы с короткозамкнутым ротором: В большинстве распространенных двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Беличья клетка получила свое название из-за своей формы — кольца на обоих концах ротора с стержнями, соединяющими кольца по всей длине ротора.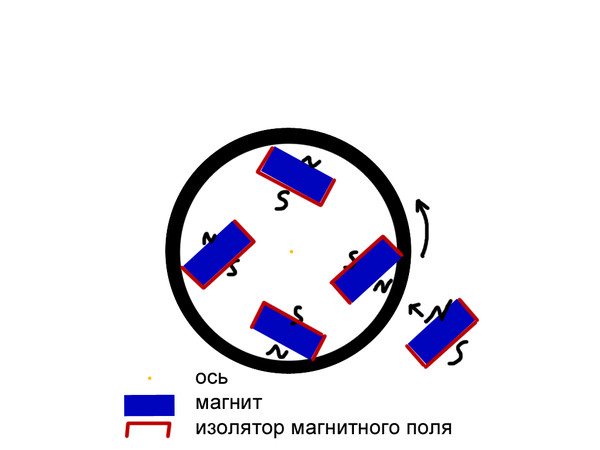 Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Подавляющее большинство токов ротора будет протекать через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь, чтобы уменьшить сопротивление ротора.
Обычно это литой алюминий или медь, залитая между металлическими пластинами ротора, и обычно видны только торцевые кольца. Подавляющее большинство токов ротора будет протекать через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Для стержней и торцевых колец типичны очень низкие напряжения при очень высоких токах; В высокоэффективных двигателях часто используется литая медь, чтобы уменьшить сопротивление ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора. Ненагруженный двигатель с короткозамкнутым ротором на синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка неразрывно связана с механической нагрузкой. Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, двигатель вентилятора с короткозамкнутым ротором может вызывать приглушение света в доме при запуске, но не приглушает свет при снятии ремня вентилятора (и, следовательно, механической нагрузки). Кроме того, заглохший двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничит ток (или не отключит его полностью), вероятным результатом будет перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, автономный вентилятор, проигрыватель и т. д. используют тот или иной вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется переменная скорость. В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют контактные кольца с внешним контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью с фазным ротором энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
В этом случае ротор имеет такое же количество полюсов, как и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки соединяют контактные кольца с внешним контроллером, таким как переменный резистор, который позволяет изменять коэффициент скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью с фазным ротором энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных электронных устройств. Транзисторные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся менее распространенными. (Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный ток сети, но это никогда не используется в бытовых приборах, потому что это может вызвать электрические помехи и из-за требований высокой мощности. )
)
Используется несколько методов запуска многофазного двигателя. Там, где допускается большой пусковой ток и высокий пусковой момент, двигатель можно запустить от сети, подав на клеммы полное линейное напряжение. Там, где необходимо ограничить пусковой ток (когда мощность двигателя велика по сравнению с мощностью короткого замыкания источника питания), используется пуск с пониженным напряжением с помощью последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска по схеме звезда-треугольник, при котором катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает нужной скорости. Этот метод более распространен в Европе, чем в Северной Америке. Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых устройствах, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость двигателя переменного тока определяется, прежде всего, частотой сети переменного тока и числом полюсов в обмотке статора согласно соотношению: р
где
- N с = Синхронная скорость, в оборотах в минуту
- F = частота сети переменного тока
- p = Количество полюсов на фазную обмотку
Фактическая скорость вращения асинхронного двигателя будет меньше расчетной синхронной скорости на величину, известную как проскальзывание , которая увеличивается с увеличением создаваемого крутящего момента. Без нагрузки скорость будет очень близка к синхронной. Под нагрузкой стандартные двигатели имеют проскальзывание 2-3 %, специальные двигатели могут иметь скольжение до 7 %, а класс двигателей, известный как 9Моментные двигатели 0121 рассчитаны на работу при 100% скольжении (0 об/мин/полный останов).
Проскальзывание двигателя переменного тока рассчитывается:
- S = ( N S — N R ) / N R ) / N R ) / N R ) / N R ) / N R ) / N R ) / N R ).
где
- N r = скорость вращения, в оборотах в минуту.
- S = нормализованное скольжение, от 0 до 1.
Например, типичный четырехполюсный двигатель, работающий на частоте 60 Гц, может иметь заявленную на паспортной табличке номинальную скорость 1725 об/мин при полной нагрузке, в то время как его расчетная скорость равна 1800. дополнительные наборы катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что теперь можно изменять частоту источника питания, чтобы обеспечить более плавное регулирование скорости двигателя.
[править]
Трехфазные синхронные двигатели переменного тока
Если соединения с обмотками ротора трехфазного двигателя выведены на контактные кольца и подаются отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнита), результат называется синхронным двигателем, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также можно использовать в качестве генератора переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие частотно-регулируемыми приводами на транзисторах. Это значительно облегчает задачу запуска массивного ротора большого синхронного двигателя. Их также можно запускать как асинхронные двигатели с использованием короткозамкнутой обмотки с общим ротором: как только двигатель достигает синхронной скорости, ток в короткозамкнутой обмотке не индуцируется, поэтому он мало влияет на синхронную работу двигателя. помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей; TGV может быть самым известным примером такого использования.
[править]
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле необходимо создавать с помощью других средств. Обычно используются несколько методов.
Обычно используются несколько методов.
Распространенным однофазным двигателем является двигатель с расщепленными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие мелкие бытовые приборы. В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса обмотана медной катушкой или лентой; индуцированный ток в ремешке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается по поверхности полюса в каждом цикле, создавая тем самым необходимое вращающееся магнитное поле.
Другим распространенным однофазным двигателем переменного тока является асинхронный двигатель с расщепленной фазой , обычно используемый в крупных бытовых приборах, таких как стиральные машины и сушилки для белья. По сравнению с двигателем с расщепленными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой момент за счет использования специальной пусковой обмотки в сочетании с центробежным выключателем.
В двигателе с расщепленной фазой пусковая обмотка имеет более высокое сопротивление, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. При пуске двигателя пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель. Пусковая обмотка намотана меньшим количеством витков проводом меньшего сечения, чем основная обмотка, поэтому имеет меньшую индуктивность (L) и большее сопротивление (R). Меньшее отношение L/R создает небольшой фазовый сдвиг, не более 30 градусов, между потоком основной обмотки и потоком пусковой обмотки. Начальное направление вращения можно изменить, просто поменяв местами соединения пусковой обмотки с рабочей обмоткой.
Фаза магнитного поля в этой пусковой обмотке смещена от фазы сетевого питания, что позволяет создать движущееся магнитное поле, запускающее двигатель. Как только двигатель достигает скорости, близкой к расчетной, срабатывает центробежный переключатель, размыкающий контакты и отключающий пусковую обмотку от источника питания. В этом случае двигатель работает только на рабочей обмотке. Пусковую обмотку необходимо отключить, так как это увеличит потери в двигателе.
В этом случае двигатель работает только на рабочей обмотке. Пусковую обмотку необходимо отключить, так как это увеличит потери в двигателе.
В пусковом двигателе с конденсатором пусковой конденсатор включен последовательно с пусковой обмоткой, создавая LC-цепь, которая способна к гораздо большему фазовому сдвигу (и, следовательно, к гораздо большему пусковому моменту). Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другим вариантом является двигатель с постоянным раздельным конденсатором (PSC) (также известный как двигатель с конденсаторным пуском и работой). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но в нем нет центробежного пускового выключателя, а вторая обмотка постоянно подключена к источнику питания. Двигатели PSC часто используются в устройствах обработки воздуха, вентиляторах и воздуходувках, а также в других случаях, когда требуется переменная скорость. Меняя отводы на рабочей обмотке, но сохраняя постоянную нагрузку, можно заставить двигатель работать с разными скоростями. Также при условии, что все 6 соединений обмоток доступны по отдельности, трехфазный двигатель можно преобразовать в конденсаторный пусковой двигатель, объединив две обмотки и подключив третью через конденсатор, который будет действовать как пусковая обмотка.
Также при условии, что все 6 соединений обмоток доступны по отдельности, трехфазный двигатель можно преобразовать в конденсаторный пусковой двигатель, объединив две обмотки и подключив третью через конденсатор, который будет действовать как пусковая обмотка.
Репульсные двигатели представляют собой однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В репульсионном двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было изготовлено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском (RS-IR). Двигатель RS-IR имеет центробежный переключатель, который закорачивает все сегменты коммутатора, так что двигатель работает как асинхронный двигатель, когда он разогнан до полной скорости. Двигатели RS-IR использовались для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 г. продается мало репульсионных двигателей любого типа9.0005
По состоянию на 2006 г. продается мало репульсионных двигателей любого типа9.0005
[править]
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут иметь намагниченный ротор (или несколько вариаций этой идеи). Роторы в этих двигателях не требуют индуктивного тока, поэтому они не скользят назад по отношению к частоте сети. Вместо этого они вращаются синхронно с частотой сети. Из-за их очень точной скорости такие двигатели обычно используются для питания механических часов, аудиопроигрывателей и ленточных накопителей; раньше они также широко использовались в точных приборах для измерения времени, таких как ленточные самописцы или приводные механизмы телескопа. Синхронный двигатель с расщепленными полюсами является одной из версий.
Поскольку инерция затрудняет мгновенное ускорение ротора от остановленной до синхронной скорости, этим двигателям обычно требуется какая-то специальная функция для запуска. В различных конструкциях используется небольшой асинхронный двигатель (который может иметь те же катушки возбуждения и ротор, что и синхронный двигатель) или очень легкий ротор с односторонним механизмом (чтобы гарантировать, что ротор запускается в направлении «вперед»).
[править]
Моментные двигатели
Моментный двигатель представляет собой особый вид асинхронного двигателя, способный работать неограниченное время в остановленном состоянии (с заблокированным от вращения ротором) без повреждений. В этом режиме двигатель будет прикладывать к нагрузке постоянный крутящий момент (отсюда и название). Обычным применением моментного двигателя могут быть двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимом в действие от низкого напряжения, характеристики этих двигателей позволяют прикладывать к ленте относительно постоянное легкое натяжение независимо от того, подает ли ведущая лента ленту мимо головок ленты. Приводимые в действие более высоким напряжением (и, таким образом, обеспечивающие более высокий крутящий момент), моментные двигатели также могут выполнять быструю перемотку вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.
[править]
Шаговые двигатели
- Основная статья: Шаговый двигатель
По своей конструкции с трехфазными синхронными двигателями переменного тока тесно связаны шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, переключаемых электронным способом.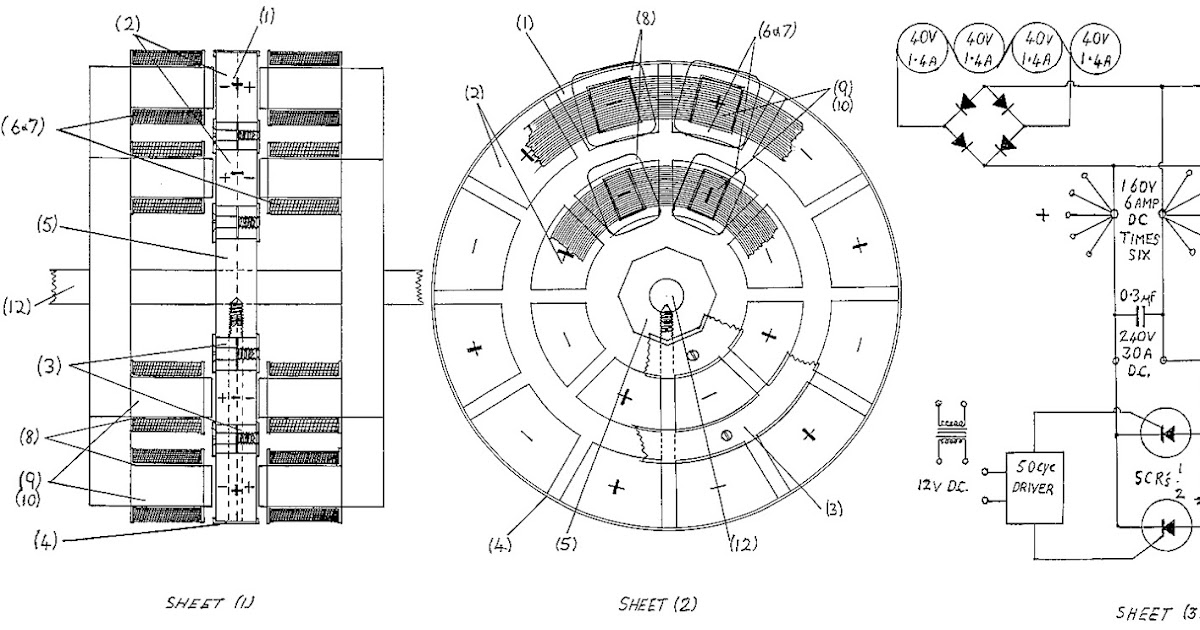 Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, при его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и выключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, при его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и выключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Простые драйверы шагового двигателя полностью запитывают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» ограниченному количеству положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться «между» точками «зубчатых колес» и, таким образом, вращаться очень плавно. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.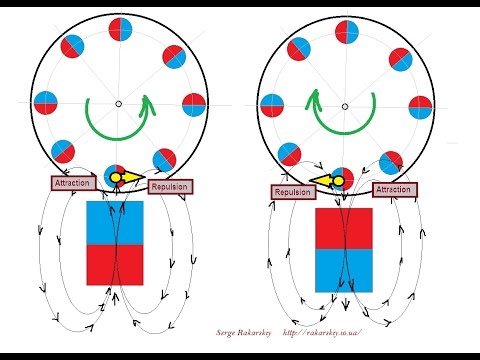
Шаговые двигатели можно легко поворачивать на определенный угол, поэтому шаговые двигатели используются в компьютерных дисководах, где высокая точность, которую они обеспечивают, необходима для правильного функционирования, например, жесткого диска или дисковода компакт-дисков.
[править]
Бесщеточные двигатели постоянного тока
- Основная статья: Бесщеточный электродвигатель постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимать щетки к коллектору. Это создает трение. На более высоких скоростях щеткам все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Несовершенный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подвержен износу и обслуживанию. Сборка коллектора на большой машине является дорогостоящим элементом, требующим точной сборки многих деталей.
Сборка коллектора на большой машине является дорогостоящим элементом, требующим точной сборки многих деталей.
Эти проблемы устранены в бесколлекторном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коллектора/щетки заменен внешним электронным переключателем, синхронизированным с положением двигателя. Бесщеточные двигатели обычно имеют КПД 85-90%, тогда как двигатели постоянного тока с щеточным механизмом обычно имеют КПД 75-80%.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится бесщеточный двигатель постоянного тока. Созданные по принципу шаговых двигателей, в них часто используется постоянный магнит 9.0009 внешний ротор , три фазы приводных катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующая приводная электроника. Катушки активируются, одна фаза за другой, электроникой привода по сигналам датчиков Холла. По сути, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода. Специализированный класс контроллеров бесщеточных двигателей постоянного тока использует обратную связь по ЭДС через основные фазовые соединения вместо датчиков Холла для определения положения и скорости. Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах.
Специализированный класс контроллеров бесщеточных двигателей постоянного тока использует обратную связь по ЭДС через основные фазовые соединения вместо датчиков Холла для определения положения и скорости. Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах.
Бесколлекторные двигатели постоянного тока обычно используются там, где необходимо точное регулирование скорости, в компьютерных дисководах или кассетных видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. д.) и механизмах в офисных устройствах, таких как вентиляторы, лазерные принтеры и копировальные аппараты. . У них есть несколько преимуществ по сравнению с обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими двигатели с расщепленными полюсами, они очень эффективны и работают намного медленнее, чем аналогичные двигатели переменного тока. Эта холодная работа приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коллектора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать сильный электрический и радиочастотный шум; без коммутатора или щеток бесщеточный двигатель можно использовать в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же самые устройства на эффекте Холла, которые обеспечивают коммутацию, также могут обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром управления (управляемых сервоприводом). В вентиляторах сигнал тахометра можно использовать для получения сигнала «вентилятор в порядке».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что обеспечивает точное регулирование скорости.
- Коллекторные двигатели нельзя использовать в космическом вакууме, потому что они привариваются к неподвижному положению.
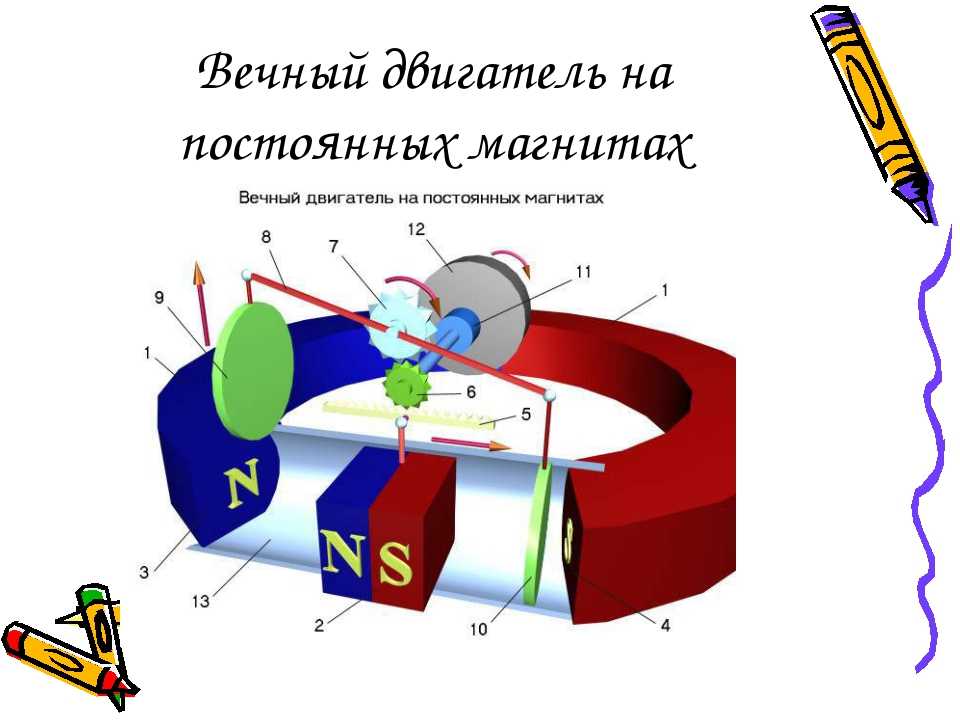

Мощность современных бесщеточных двигателей постоянного тока варьируется от долей ватта до многих киловатт. В электромобилях используются более крупные бесщеточные двигатели мощностью до 100 кВт. Они также находят широкое применение в высокопроизводительных электрических моделях самолетов.
[править]
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта в том, что двигатель постоянного тока без сердечника представляет собой специализированную форму щеточного двигателя постоянного тока. Эти двигатели, оптимизированные для быстрого ускорения, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоской формы.0121 блин (возможно сформированный на печатной плате) проходит между верхним и нижним магнитами статора.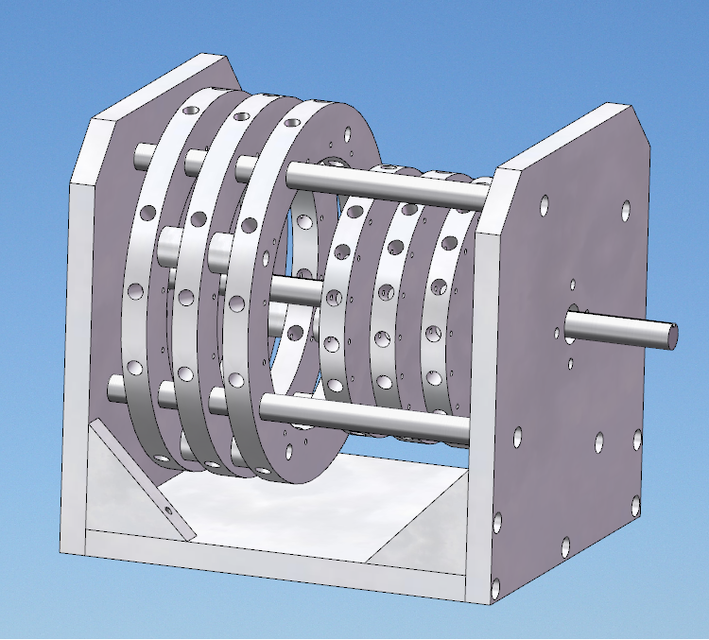 Обмотки обычно стабилизируются пропиткой эпоксидными смолами.
Обмотки обычно стабилизируются пропиткой эпоксидными смолами.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, образованный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая действовала бы как радиатор, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода шпилей магнитных ленточных накопителей и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
[править]
Линейные двигатели
Линейный двигатель представляет собой электродвигатель, который был «развернут» таким образом, что вместо создания крутящего момента (вращения) он создает линейную силу по своей длине за счет создания движущегося электромагнитного поле.
Линейные двигатели чаще всего представляют собой асинхронные или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летает» над землей.
[править]
Наномотор
Наномотор, построенный Калифорнийским университетом в Беркли. Диаметр двигателя около 500 нм: в 300 раз меньше диаметра человеческого волоса
Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многостенных углеродных нанотрубок. Прикрепив золотую пластину (с размерами порядка 100 нм) к внешней оболочке подвешенной многостенной углеродной нанотрубки (наподобие вложенных углеродных цилиндров), они способны электростатически вращать внешнюю оболочку относительно внутреннего ядра. Эти подшипники очень прочные; Устройства подвергались колебаниям тысячи раз без признаков износа. Работа была выполнена на месте в РЭМ. Эти наноэлектромеханические системы (НЭМС) представляют собой следующий шаг в миниатюризации, который в будущем может найти применение в коммерческих аспектах.
Примечание. Тонкая вертикальная нить в центре представляет собой нанотрубку, к которой прикреплен ротор. Когда внешняя трубка разрезается, ротор может свободно вращаться на подшипнике из нанотрубки.
Процесс и технология видны на этом рендере.
- Физики построили самый маленький в мире двигатель с использованием нанотрубок и травленого кремния
- Исследовательский проект
- Электростатический двигатель
[править]
См. также
Компоненты:
- Центробежный переключатель
- Коллектор (электрический)
- Контактное кольцо
Ученые и инженеры:
- Отто Блати
- Томас Эдисон
- Зенобе Грамм
- Фрэнк Дж. Спраг
- Никола Тесла
- Джордж Вестингауз
Применение:
- Настольная пила
- Электромобиль
- Коррекция коэффициента мощности
Прочее:
- Электротехника
- Электрический элемент
- Электрический генератор
- Список тем по электронике
- Список технологий
- Теорема о максимальной мощности
- Мотор-генератор
- Контроллер двигателя
- Метод движения
- Однофазная электроэнергия
- Хронология моторов и двигателей
[править]
Внешние ссылки
- «Разборка тягового двигателя — Associated Rewinds (Ireland) Limited»
- Электродвигатели и генераторы, объяснения с анимацией от Университета Нового Южного Уэльса.
- Игра чисел: учебник по номинальной мощности однофазного электродвигателя переменного тока, Кевин С. Брэди.

[править]
Учебники
- Shanefield D. J., Промышленная электроника для инженеров, химиков и техников, William Andrew Publishing, Norwich, NY, 2001. Учебник для самообучения, в котором кратко рассматриваются электродвигатели, трансформаторы, регуляторы скорости, коды проводки и заземления, транзисторы, цифровые устройства и т. д. Легко читать и понимать, вплоть до начального уровня на каждый предмет, а не подходящий справочник для технологов, уже работающих в любой из этих областей.
- Fitzgerald/Kingsley/Kusko (Fitzgerald/Kingsley/Umans в более поздние годы), * Electric Machinery , классический текст для младших и старших студентов-электриков. Первоначально опубликовано в 1952, 6-е издание, опубликованное в 2002 году. Авторы по-прежнему указаны как Фицджеральд/Кингсли/Уманс, хотя Фицджеральд и Кингсли уже умерли.
- Бедфорд, Б.Д.; Хофт, Р. Г. и др. (1964). Принципы инверторных цепей . Нью-Йорк: John Wiley & Sons, Inc.. 0 471 06134 4. (Схемы инвертора используются для управления скоростью двигателя с переменной частотой)
- Б. Р. Пелли, «Тиристорные преобразователи с фазоуправляемым управлением и циклопреобразователи: работа, управление и производительность» (Нью-Йорк: John Wiley, 1971).

[править]
Ссылки
- Дональд Г. Финк и Х. Уэйн Бити, Стандартный справочник для инженеров-электриков, одиннадцатое издание , McGraw-Hill, Нью-Йорк, 1978, ISBN 007020974X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано П.Ф. Кольер и сыновья Нью-Йорк, 1902 г.
- Купхалдт, Тони Р. (2000–2006 гг.). «Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА», Уроки электрических цепей — Том II . Проверено 11 апреля 2006 г.
- А.О.Смит: Переменный и постоянный ток электродвигателей. Проверено 11 апреля 2006 г.
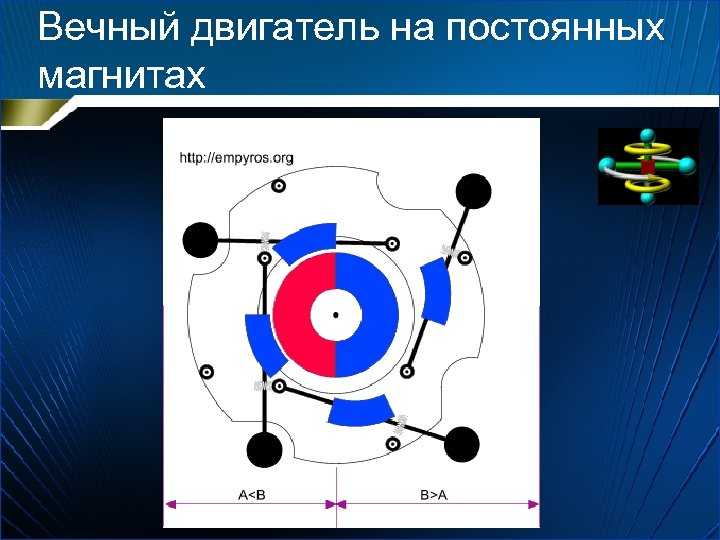
Электродвигатели — Restarters Wiki
Содержание
- 1 Обзор
- 1.1 Безопасность
- 2 типа двигателя
- 2.1 Двигатели постоянного тока и универсальные (AC/DC) двигатели
- 2.2 Асинхронные двигатели
- 2.3 Синхронные двигатели
- 2.4 Реактивные двигатели
- Бесколлекторный двигатель 2,5
- Шаговые двигатели 2.6
- 3 Диагностика и ремонт
На этой странице рассказывается об электродвигателях различных типов, о том, как их идентифицировать и понимать их распространенные виды отказов, а также как их тестировать.
Резюме
Многие устройства и приборы содержат электродвигатели. Эта страница поможет вам понять, как они работают, что может пойти не так и, возможно, как их исправить.
Безопасность
- Двигатели в бытовых приборах могут быть довольно мощными и вместе с соответствующими шестернями и механизмами могут привести к травмам. Как и в случае со всеми сетевыми электроприборами, перед началом работы необходимо отключить их от сети. Прибор должен быть проверен PAT как до, так и после любой попытки разборки или ремонта.
- Двигатели в бытовых приборах могут быть довольно мощными и вместе с соответствующими шестернями и механизмами могут привести к травмам.
 Как и в случае со всеми сетевыми электроприборами, перед началом работы необходимо отключить их от сети. Прибор должен быть проверен PAT как до, так и после любой попытки разборки или ремонта.
Как и в случае со всеми сетевыми электроприборами, перед началом работы необходимо отключить их от сети. Прибор должен быть проверен PAT как до, так и после любой попытки разборки или ремонта.Типы двигателей
Существует множество типов электродвигателей, но почти все они делятся на три основных типа. Все они состоят из двух основных компонентов:
- Ротор — вращающаяся насадка и
- Статор — бита, которая не вращается.
Все они основаны на электромагнетизме . Когда электрический ток течет по катушке провода, он создает магнитное поле. Катушка обычно наматывается на железный сердечник, который затем намагничивается, что значительно увеличивает магнетизм.
Двигатели постоянного тока и универсальные (AC/DC) двигатели
Универсальный двигатель в разобранном виде.
Универсальный двигатель с ротором и коллектором.
Универсальный двигатель со статором со щетками на дальнем конце.
Статор представляет собой постоянный магнит или электромагнит.
В простейших игрушечных двигателях ротор представляет собой еще одну катушку или целый ряд катушек во всех практических двигателях, намотанных на ламинированный железный сердечник.
Пара угольных щеток подает ток на ротор через коммутатор , который постоянно переключает ток в роторе на катушки, расположенные под прямым углом к катушке статора в любой данный момент. Это создает постоянную вращающую силу.
В двигателях с электронной коммутацией или бесщеточных двигателях ротор часто представляет собой постоянный магнит. Электронные схемы определяют положение ротора и постоянно переключают ток в серии катушек статора, чтобы вращать ротор. Это устраняет необходимость в каком-либо электрическом соединении с ротором и, таким образом, повышает надежность.
Двигатели постоянного тока и универсальные двигатели работают так же хорошо, как и динамо-машины, и генерируют напряжение, противоположное приложенному напряжению. Это известно как «обратная ЭДС (электродвижущая сила)». При небольшой нагрузке эти двигатели разгоняются до тех пор, пока не будут генерировать почти столько же напряжения, сколько приложено. Следовательно, легко изменить скорость, просто изменяя приложенное напряжение.
Это известно как «обратная ЭДС (электродвижущая сила)». При небольшой нагрузке эти двигатели разгоняются до тех пор, пока не будут генерировать почти столько же напряжения, сколько приложено. Следовательно, легко изменить скорость, просто изменяя приложенное напряжение.
Коллектор и щетки (кроме электродвигателей) подвержены износу и могут вызывать искрение. Поэтому такие двигатели не используются там, где требуется высочайшая надежность или существует опасность возгорания или взрыва горючих газов.
Эффект динамо минимален при первом запуске двигателя и до того, как он достигнет полной скорости. Это позволяет двигателю потреблять большой ток и генерировать очень большой пусковой момент (т. е. вращающее усилие). Это особенно полезно в электромобилях и поездах, где для первоначального приведения их в движение необходима мощная сила.
Двигатель без сердечника — ротор и корпус с постоянным магнитом, видимым внутри корпуса.
В двигателе без сердечника обмотки ротора сформированы в виде полого цилиндра, связанного смолой — железный сердечник отсутствует. Он вращается вокруг статического постоянного магнита, расположенного внутри него. Магнитное поле проходит от одного полюса магнита через обмотки ротора, а затем возвращается через стальной корпус двигателя, снова через противоположную сторону ротора и, следовательно, обратно к другому полюсу магнита.
Он вращается вокруг статического постоянного магнита, расположенного внутри него. Магнитное поле проходит от одного полюса магнита через обмотки ротора, а затем возвращается через стальной корпус двигателя, снова через противоположную сторону ротора и, следовательно, обратно к другому полюсу магнита.
Двигатель без сердечника — Коллектор и щетки.
Ток подается на ротор через щетки и коллектор так же, как и в любом другом двигателе постоянного тока или универсальном двигателе. Отсутствие железного сердечника повышает эффективность, снижает вес и снижает инерцию, обеспечивая очень быстрое ускорение и торможение.
Моторы без сердечника часто используются в небольших квадрокоптерах и других игрушках, а также в медицинском оборудовании, робототехнике и везде, где требуется небольшой высокоэффективный и отзывчивый двигатель.
В большинстве ручных электроинструментов используются универсальные двигатели. Компьютерные вентиляторы, двигатели жестких дисков и более крупные квадрокоптеры и модели с дистанционным управлением обычно используют двигатели с электронной коммутацией.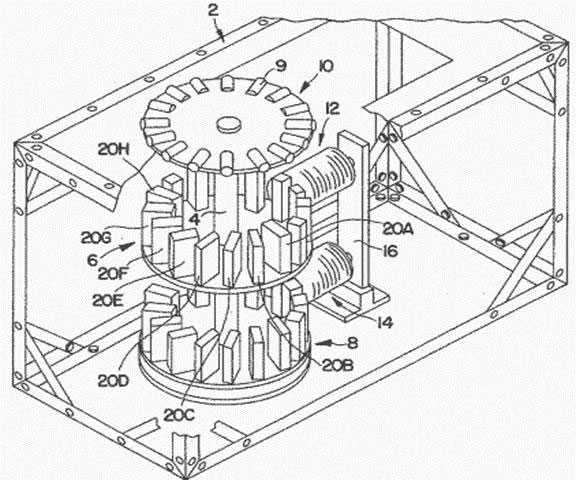
Есть отличная статья с приложенным видео, описывающим и демонстрирующим, как работает двигатель постоянного тока.
Асинхронные двигатели
Они проще по конструкции, но их не так легко понять.
Если вы перемещаете магнит по куску металла, движущееся магнитное поле генерирует циркулирующий электрический ток в металле. Этот ток, в свою очередь, создает магнитное поле, которое взаимодействует с приложенным полем таким образом, что создает сопротивление, противодействующее движению.
Небольшой асинхронный двигатель с расщепленными полюсами в разобранном виде.
Статор состоит из двух или более катушек, расположенных так, чтобы создавать вращающееся магнитное поле. Ротор содержит несколько толстых медных петель для максимального сопротивления, создаваемого вращающимся магнитным полем. Ротор ускоряется до тех пор, пока не станет вращаться почти так же быстро, как вращающееся магнитное поле.
Асинхронные двигатели работают только от сети переменного тока (которая меняет направление 100 раз в секунду), так как именно так статор может создавать вращающееся магнитное поле.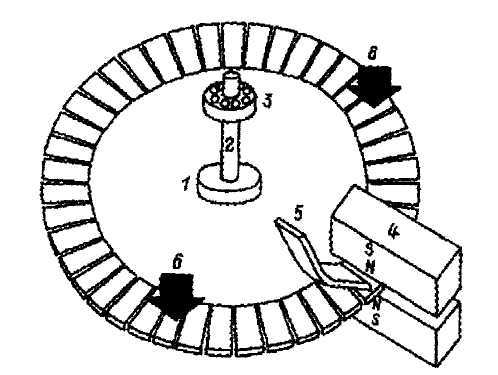
Поскольку частота переменного тока фиксирована, вы не можете легко изменить скорость асинхронного двигателя. Однако, имея 4 или 6 (или более) катушек статора вместо 2, и изменив способ подачи на них переменного тока, можно сделать так, чтобы вращающееся магнитное поле вращалось наполовину, на треть (или на какую-то другую долю) скорость.
В большинстве асинхронных двигателей статор производит большее движение вверх и вниз, чем истинное вращающееся магнитное поле, но с небольшим поворотом в одну сторону при движении вверх и в другую сторону при движении вниз. Это означает, что пусковой момент низкий. Следовательно, они обычно используются там, где это не имеет значения, например. в вентиляторе, который встречает небольшое сопротивление воздуха, пока не достигнет полной скорости.
Асинхронный двигатель с пусковой обмоткой.
Существует несколько способов получения крутки. В двигателе с экранированными полюсами толстая медная петля намотана вокруг части каждого полюса (как видно на первой фотографии). Это приводит к небольшой задержке намагничивания этой части полюса из-за нарастания тока в петле, что обеспечивает требуемый поворот. Медный контур тратит энергию впустую, поэтому этот метод используется только в небольших двигателях, которые очень часто используются в настольных вентиляторах.
Это приводит к небольшой задержке намагничивания этой части полюса из-за нарастания тока в петле, что обеспечивает требуемый поворот. Медный контур тратит энергию впустую, поэтому этот метод используется только в небольших двигателях, которые очень часто используются в настольных вентиляторах.
Большие двигатели имеют вторую обмотку статора, смещенную от основной, которая питается противофазным током. Конденсатор (большой цилиндрический компонент, который нельзя не заметить) или иногда резистор обеспечивают фазовый сдвиг. На рисунке показан пример двигателя роторной газонокосилки, на котором хорошо видна вторая обмотка, смещенная на 90 градусов.
(Интересной особенностью показанного двигателя является то, что он имел тормозной механизм для остановки вращения лопасти после отключения питания. На шпинделе виден металлический диск с пружиной под ним, которая прижимала его к трем видимым тормозным колодкам. вокруг подшипника. Когда подается мощность, магнитное поле тянет этот диск вниз и от тормозных колодок. Коррозия диска вызвала чрезмерно сильное торможение. Затем лыски на шпинделе изнашивали соответствующие лыски на пластиковом крыльчатка, к которой была прикреплена лопасть. Угловой момент лопасти заставил ее стопорный болт ослабнуть.)
Коррозия диска вызвала чрезмерно сильное торможение. Затем лыски на шпинделе изнашивали соответствующие лыски на пластиковом крыльчатка, к которой была прикреплена лопасть. Угловой момент лопасти заставил ее стопорный болт ослабнуть.)
Вторая обмотка статора может расходовать энергию после запуска двигателя и, следовательно, может быть отключена центробежным выключателем. В качестве альтернативы может быть термистор, который быстро нагревается при протекании тока, и при этом его сопротивление увеличивается, что снижает ток во второй обмотке статора.
Большие промышленные асинхронные двигатели мощностью в несколько лошадиных сил часто питаются от трехфазной сети. С 3 обмотками (или кратными 3), питаемым от 3 фаз, они естественным образом создают вращающееся магнитное поле и, таким образом, запускаются автоматически.
Существует отличная статья с видео, описывающим и объясняющим, как работают асинхронные двигатели.
Синхронные двигатели
Они аналогичны асинхронным двигателям тем, что статор создает вращающееся магнитное поле. Разница в том, что ротор представляет собой постоянный магнит и, следовательно, вынужден вращаться с той же скоростью, что и магнитное поле, а не отставать по скорости, как в асинхронном двигателе.
Разница в том, что ротор представляет собой постоянный магнит и, следовательно, вынужден вращаться с той же скоростью, что и магнитное поле, а не отставать по скорости, как в асинхронном двигателе.
Представьте себе две консервные банки, одна внутри другой. Если вы заполните пространство между ними патокой и повернете внешнюю банку, она потянет за собой внутреннюю, даже если вы будете сопротивляться ее движению. Разница в скорости будет зависеть от сопротивления, которое вы оказываете. Это как асинхронный двигатель. Если вместо патоки прикрепить пружинами внутреннюю банку к внешней, то внутренняя будет вынуждена вращаться с той же скоростью, но растянет пружины и будет отставать в положении, но не в скорости, так как вы увеличиваете сопротивление. Это как синхронный двигатель.
Небольшие синхронные двигатели используются в электромеханических таймерах и сетевых электрических часах, где их вращение привязано к частоте сети переменного тока. На крупных промышленных предприятиях также иногда используются гораздо более крупные и мощные синхронные двигатели, в которых ротор фактически представляет собой электромагнит, питаемый постоянным током. Автомобильный генератор переменного тока и генераторы на электростанции представляют собой синхронные двигатели, используемые в качестве генераторов.
Автомобильный генератор переменного тока и генераторы на электростанции представляют собой синхронные двигатели, используемые в качестве генераторов.
Поскольку синхронный двигатель не работает должным образом до тех пор, пока ротор не разгонится до нужной скорости, необходимо применить некоторые хитрые средства, чтобы запустить его. В небольших двигателях с часами и таймерами это обычно достигается за счет формы стали статора. Поскольку магнитное поле от катушки статора меняется на противоположное с каждым циклом подачи переменного тока, изменение направления магнетизма постепенно распространяется через железо особой формы таким образом, что оно изгибается. Некоторые старые сетевые электрические часы содержат механизм, который вы должны активировать, чтобы дать ротору начальный толчок, чтобы запустить его.
Реактивные двигатели
Некоторые синхронные двигатели на самом деле являются реактивными двигателями. Разница в том, что если ротор синхронного двигателя представляет собой постоянный магнит, то в реактивном двигателе он просто состоит из куска железа определенной формы. Он тащится точно так же, как постоянно пытается выровняться с вращающимся магнитным полем.
Он тащится точно так же, как постоянно пытается выровняться с вращающимся магнитным полем.
Бесколлекторные двигатели
Бесколлекторный двигатель на самом деле представляет собой синхронный двигатель, приводимый в движение электронной схемой для привода катушек статора и создания вращающегося магнитного поля. Электронная схема может довольно легко управлять скоростью двигателя, изменяя частоту питания, подаваемого на обмотки статора. Квадрокоптеры (кроме маленьких игрушечных с двигателями без сердечника) обычно используют бесколлекторные двигатели.
Шаговые двигатели
Часто требуется двигатель, который вместо непрерывного вращения может получить команду повернуться на заданную величину и остановиться. Примером может служить двигатель, который приводит в движение ролики подачи бумаги в принтере. Они должны продвигать бумагу на ширину печатающей головки и останавливаться после печати каждой строки пикселей. Точно так же аналоговые кварцевые часы обычно каждую секунду передвигают секундную стрелку на секунду. В обоих случаях используются шаговые двигатели.
В обоих случаях используются шаговые двигатели.
Существуют различные конфигурации, но самая простая и понятная состоит из статора, состоящего из двух катушек, расположенных под прямым углом, и ротора с постоянными магнитами внутри них. Первоначально одна катушка находится под напряжением, и постоянный магнит выравнивается с ее магнитным полем. Если другая катушка также находится под напряжением, магнит повернется на 45 градусов в положение между ними и завершит поворот на 90 градусов, когда первая катушка выключится. Повторное включение первой катушки в противоположном направлении приведет к тому, что ротор продолжит движение еще на 45 градусов и так далее. Таким образом, вал, прикрепленный к постоянному магниту, можно поворачивать на 45 градусов за раз по мере необходимости. При обратной последовательности его можно повернуть в обратном направлении, если это требуется.
Диагностика и ремонт
Все типы двигателей могут заклинить, если подшипники засорятся грязью или пылью, что легко может произойти в электроинструментах. Бритвы, электрические зубные щетки и кухонные приборы могут заклинить из-за попадания воды и т. д. Очистка может быть всем, что требуется, но в случае воды предотвратить повторение того же может быть непросто. Узнайте, доступны ли запасные уплотнения. Заклинивший подшипник часто можно освободить с помощью WD40, а забитую пылью шариковую дорожку можно очистить с помощью уайт-спирита, но в любом случае важно смазать подходящим маслом или консистентной смазкой после очистки и высыхания, так как ни WD40, ни уайт-спирит не действуют. хорошие смазки.
Бритвы, электрические зубные щетки и кухонные приборы могут заклинить из-за попадания воды и т. д. Очистка может быть всем, что требуется, но в случае воды предотвратить повторение того же может быть непросто. Узнайте, доступны ли запасные уплотнения. Заклинивший подшипник часто можно освободить с помощью WD40, а забитую пылью шариковую дорожку можно очистить с помощью уайт-спирита, но в любом случае важно смазать подходящим маслом или консистентной смазкой после очистки и высыхания, так как ни WD40, ни уайт-спирит не действуют. хорошие смазки.
Небольшие двигатели, предназначенные для работы от аккумуляторов, часто не предназначены для разборки, хотя это можно сделать, согнув фиксирующие их выступы. Более крупные, например те, которые предназначены для работы от сети, часто можно разобрать, удалив два длинных болта, проходящих по их длине. В случае двигателей постоянного тока и универсальных двигателей при повторной сборке вам потребуется снять щетки или удерживать их в стороне, чтобы установить ротор на место с коллектором между ними.
При заклинивании двигатель потребляет большой ток. Он предназначен для мгновенного запуска при запуске, но если его не включить, он может перегреться и повредить изоляцию, а в худшем случае сжечь обмотки. Запах гари является явным признаком неисправности, а поврежденная изоляция может привести к непостоянной скорости. Если есть какие-либо признаки ухудшения изоляции, двигатель следует утилизировать. (Специализированные фирмы перематывают большие промышленные двигатели, но вряд ли это будет экономически выгодно для бытового двигателя, и это непростая задача, которую можно выполнить самостоятельно.)
При отсутствии видимых признаков износа стоит проверить обмотки мультиметром на диапазоне сопротивлений. Низкое значение является нормальным, так как приложенное напряжение ограничено не сопротивлением обмоток, а динамо-эффектом, который всегда противостоит ему.
Распространенной неисправностью двигателей постоянного тока и универсальных двигателей является износ угольных щеток, контактирующих с коллектором, или загрязнение коллектора. Чрезмерное искрообразование является верным признаком того, что требуется срочное техническое обслуживание. Щетки обычно прижимаются к коллектору с помощью пружины, но они могут потерять хороший контакт, если они полностью изнашиваются или если им препятствует скольжение вниз внутри их корпусов по мере их износа. Замену можно получить, но вам нужно будет позаботиться о выборе правильного размера. Замены могут быть доступны для вашей конкретной марки и модели прибора, в противном случае тщательно измерьте старые щетки и их корпус, и вы сможете найти подходящие замены в Интернете. Если щетка изнашивается до самой пружины, искрение может привести к необратимому повреждению коллектора.
Чрезмерное искрообразование является верным признаком того, что требуется срочное техническое обслуживание. Щетки обычно прижимаются к коллектору с помощью пружины, но они могут потерять хороший контакт, если они полностью изнашиваются или если им препятствует скольжение вниз внутри их корпусов по мере их износа. Замену можно получить, но вам нужно будет позаботиться о выборе правильного размера. Замены могут быть доступны для вашей конкретной марки и модели прибора, в противном случае тщательно измерьте старые щетки и их корпус, и вы сможете найти подходящие замены в Интернете. Если щетка изнашивается до самой пружины, искрение может привести к необратимому повреждению коллектора.
Некоторые профессиональные и высококачественные самодельные электроинструменты имеют щетки со встроенным подпружиненным пластиковым штифтом. Когда уголь изнашивается до предела, штифт освобождается, отталкивая изношенную щетку от коллектора, чтобы предотвратить дальнейший износ и необратимое повреждение. Известно, что профессионалы выбрасывают дорогие электроинструменты, которые внезапно перестали работать по этой причине — легкое решение, если вы можете распознать проблему.
Известно, что профессионалы выбрасывают дорогие электроинструменты, которые внезапно перестали работать по этой причине — легкое решение, если вы можете распознать проблему.
Асинхронные двигатели с экранированными полюсами обычно очень надежны, но пусковые конденсаторы, термисторы и центробежные механизмы могут выйти из строя. Если есть конденсатор, он может показать явные признаки неисправности, в противном случае проверьте его, если можете. Если ничего другого, вы можете использовать мультиметр в диапазоне сопротивлений, чтобы проверить, не закорочено ли оно.
Электродвигатель содержит много меди и железа, поэтому утилизируйте его ответственно!
Что такое двигатель ЕС с электронной коммутацией?
Что такое двигатель ЕС с электронной коммутацией? Двигатель с электронной коммутацией (EC) предназначен для работы от источника переменного тока (AC), но на самом деле он больше похож на двигатель постоянного тока (DC). По сути, это бесщеточный двигатель постоянного тока с постоянными магнитами, который включает в себя встроенную электронику.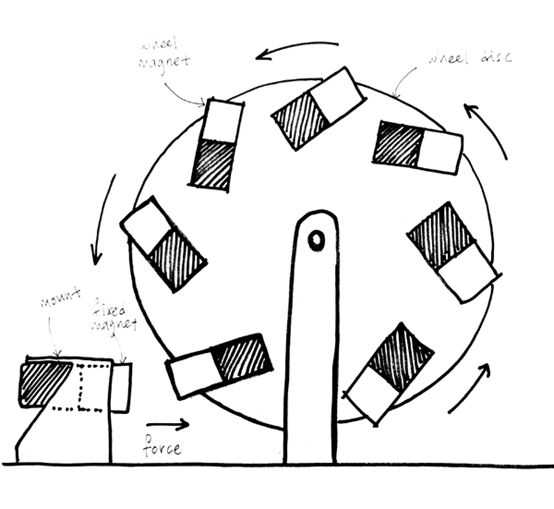 Добавленная электроника позволяет двигателю EC сочетать в себе лучшие характеристики двигателей переменного и постоянного тока, а затем улучшать их. По этой причине двигатель ЕС находится в отдельной категории.
Добавленная электроника позволяет двигателю EC сочетать в себе лучшие характеристики двигателей переменного и постоянного тока, а затем улучшать их. По этой причине двигатель ЕС находится в отдельной категории.
Благодаря использованию этой технологии ЕС-вентиляторы отличаются высокой эффективностью и окупаются за счет снижения эксплуатационных расходов и увеличения срока службы. Они также обеспечивают множество эксплуатационных преимуществ, которые часто упускают из виду. Как только эти характеристики будут полностью признаны в Северной Америке, ЕС-вентиляторы станут следующей революцией в индустрии движения воздуха.
Конструкция двигателя
Внутренний и внешний ротор
Двигатели бывают самых разных форм и размеров, при этом общепринятой конфигурацией является внутренняя конфигурация ротора.
Двигатели с внутренним ротором имеют статор (неподвижный элемент), прикрепленный к корпусу двигателя. Ротор (вращающийся элемент) расположен внутри статора и передает крутящий момент через выходной вал. Крыльчатка вентилятора обычно крепится к вращающемуся валу.
Крыльчатка вентилятора обычно крепится к вращающемуся валу.
Двигатели с внешним ротором имеют противоположную ориентацию, при этом ротор вращается снаружи статора. Это устраняет необходимость в выходном валу и значительно уменьшает общую площадь, занимаемую двигателем и крыльчаткой в сборе. Крыльчатка вентилятора может быть прикреплена непосредственно к внешнему ротору, эффективно создавая моторизованную крыльчатку.
Переменный ток, постоянный ток и ЕС
Все электродвигатели выполняют одну и ту же функцию преобразования электрической энергии в механическую, но выполняют ее по-разному. Используемый метод зависит в основном от мощности, подаваемой на двигатель, поскольку это влияет на то, как создаются и контролируются их магнитные поля. По этой причине двигатели часто классифицируют как двигатели переменного тока, постоянного тока или ЕС. В вентиляторной промышленности распространенными типами каждого из них являются асинхронный двигатель переменного тока, коллекторный двигатель постоянного тока и двигатель с постоянными магнитами EC.
Асинхронные двигатели переменного тока имеют электрические обмотки в статоре, на которые подается переменный ток для создания вращающегося магнитного поля. Поле статора индуцирует ток в проводящем роторе с короткозамкнутым ротором, а взаимодействие между двумя магнитными полями создает крутящий момент на роторе.
Двигатели переменного тока с фиксированной частотой сети имеют ограниченный диапазон скоростей, поэтому они рассчитаны на работу в точке максимальной эффективности на кривой производительности. За пределами этого диапазона эффективность имеет тенденцию к значительному падению. Преобразователь частоты (VFD) может использоваться для увеличения или уменьшения частоты источника переменного тока, но он, как правило, довольно громоздкий и дорогой. Вот почему двигатели переменного тока лучше всего подходят для приложений, где не требуется регулировка скорости.
Коллекторные двигатели постоянного тока используют постоянные магниты в статоре для создания постоянного магнитного поля. Электрические обмотки в роторе индуцируются напряжением и находятся под влиянием магнитного поля статора. Изменение напряжения питания позволяет управлять скоростью двигателей постоянного тока намного проще, чем двигателей переменного тока.
Электрические обмотки в роторе индуцируются напряжением и находятся под влиянием магнитного поля статора. Изменение напряжения питания позволяет управлять скоростью двигателей постоянного тока намного проще, чем двигателей переменного тока.
Поскольку они работают на постоянном токе, они используют угольные щетки и переключающее кольцо для переключения направления тока. Износ этих механических компонентов может способствовать увеличению рабочего шума и сокращению ожидаемого срока службы. Кроме того, источники питания постоянного тока не так распространены, как раньше, поэтому приобретение автономного выпрямителя переменного тока в постоянный означает дополнительные затраты и сложность.
ЕС-двигатели используют постоянные магниты и электрические обмотки для создания своих магнитных полей аналогично коллекторным двигателям постоянного тока. Однако, как следует из их названия, они коммутируют электроникой, а не механически. Это возможно только за счет включения бортовой электроники в корпус электронно-коммутируемого двигателя EC.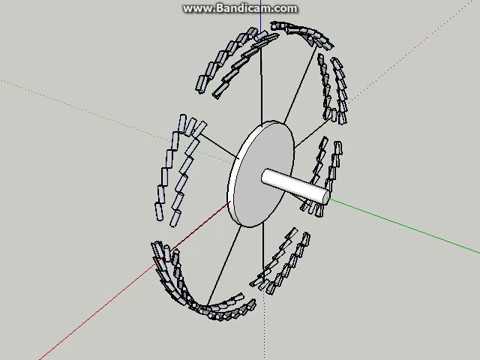
Бортовая электроника включает выпрямитель, который преобразует переменный ток в постоянный. Затем встроенный контроллер направляет нужное количество тока в нужном направлении в нужное время через каждую из обмоток. Это создает магнитные полюса в статоре, которые взаимодействуют с постоянными магнитами в роторе.
Положение каждого магнита определяется с помощью датчиков Холла. Соответствующие магниты последовательно притягиваются к магнитным полюсам статора. Одновременно с обратной полярностью заряжаются остальные обмотки статора. Эти силы притяжения и отталкивания объединяются для обеспечения вращения и создания оптимального крутящего момента. Поскольку все это делается электронным способом, возможен точный мониторинг и управление двигателем.
Преимущества двигателя с электронной коммутацией EC
Энергоэффективность
КПД двигателя ЕС с электронной коммутацией часто превышает 90%, что позволяет ЕС-вентиляторам потреблять на 70% меньше энергии по сравнению с обычными вентиляторами.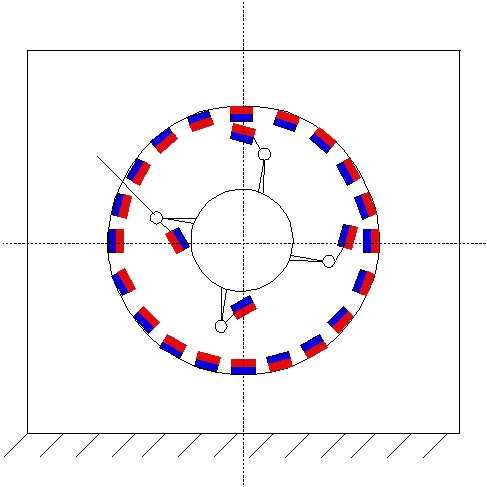
Регулируя скорость двигателя EC в соответствии с потребностями, потенциал экономии энергии продолжает расти. Ниже показаны типичные КПД асинхронного двигателя переменного тока мощностью 5 л.с., 1800 об/мин и эквивалентного двигателя ЕС.
Даже по сравнению с работой вкл/выкл, модуляция скорости, предлагаемая EC-вентиляторами, более эффективна. Например, работа ЕС-вентилятора в течение 80 % времени позволяет сэкономить 20 % энергии, а работа его на скорости 80 % экономит почти 50 % энергии. Это возможно только с технологией EC, которая обеспечивает очень высокую эффективность в диапазоне скоростей.
Наиболее очевидным преимуществом высокой эффективности является снижение энергопотребления. В условиях роста цен на энергоносители это важный фактор, который следует учитывать.
Чтобы подчеркнуть важность, ниже приведен пример экономии энергии при скорости 50%. В этом примере предполагается, что средняя стоимость составляет 0,115 долл. США/кВтч, эффективность частотно-регулируемого привода (ЧРП) составляет 86 %, а двигатель работает в непрерывном режиме.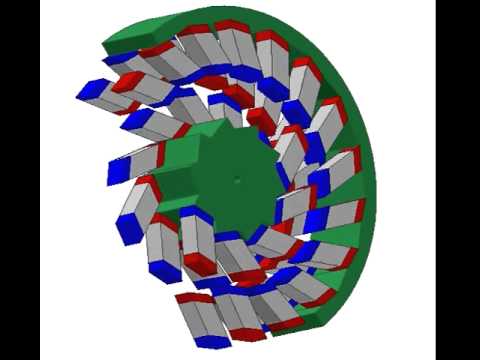
Хотя годовая экономия кажется незначительной, следует отметить, что это относится к замене одного вентилятора и не учитывает другие потери, например, в линии или ремне. Еще одним фактором, который следует учитывать, помимо более низких эксплуатационных расходов, являются скидки на коммунальные услуги, которые могут быть доступны.
Высокая эффективность также приводит к ряду вторичных и третичных преимуществ, показанных на диаграмме ниже.
Преимущество высокой эффективности заключается в уменьшении потерь энергии в окружающую среду. Эти потери, как правило, в виде тепла и звука.
Поскольку ЕС-двигатели выделяют меньше тепла, их обмотки и подшипники подвергаются меньшей нагрузке, что продлевает срок службы двигателя. Более низкие рабочие температуры также способствуют повышению эффективности системы при использовании в системах охлаждения. Между тем, более тихая работа приводит к повышенному комфорту пассажиров.
Простота управления
Высокая эффективность двигателей EC во многом объясняется встроенной электроникой. Благодаря постоянному мониторингу функций двигателя и автоматической регулировке входного сигнала управления поддерживается высокая эффективность во всем рабочем диапазоне скоростей. Электродвигатели EC часто можно снизить до 20% от полной скорости, сохраняя при этом КПД 85%.
Благодаря постоянному мониторингу функций двигателя и автоматической регулировке входного сигнала управления поддерживается высокая эффективность во всем рабочем диапазоне скоростей. Электродвигатели EC часто можно снизить до 20% от полной скорости, сохраняя при этом КПД 85%.
Датчики, выдающие сигнал 0-10 В, ШИМ или 4-20 мА, могут быть подключены напрямую к большинству двигателей EC. Это обеспечивает регулирование скорости без необходимости использования сложного частотно-регулируемого привода (ЧРП).
В зависимости от приложения могут быть реализованы методы управления как с разомкнутым, так и с замкнутым контуром. Вентиляторы с электронно-коммутируемыми ЕС-двигателями могут регулировать температуру, давление или любой другой параметр, выбранный для измерения. Постоянный контроль давления особенно полезен для воздуховодов, а постоянный контроль воздушного потока идеален для систем с фильтрами. В качестве альтернативы можно подключить потенциометр для ручного управления переменной скоростью.
Универсальность
Максимальная скорость обычных асинхронных двигателей переменного тока ограничена стандартным значением, называемым синхронной скоростью. Это теоретическая скорость, основанная на количестве электромагнитных полюсов и частоте источника питания.
С другой стороны, ЕС-двигатели способны развивать скорость, превышающую номинальную. Это позволяет вентиляторам с ЕС-двигателями достигать более высокой производительности при меньшем размере блока вентиляторов, как показано ниже на рис. 1. Больший рабочий диапазон ЕС-вентиляторов позволяет легко подобрать производительность для данного приложения. Сочетание высокой производительности и способности ЕС-двигателя поддерживать эффективность при частичной нагрузке позволяет одному ЕС-вентилятору заменить несколько типов и размеров обычных вентиляторов.
Области применения ЕС-вентиляторов
Существует множество приложений, позволяющих экономически эффективно использовать вентиляторы с ЕС-двигателями. Вентиляционные системы представляют прекрасную возможность по двум основным причинам:
Вентиляционные системы представляют прекрасную возможность по двум основным причинам:
- Вентиляционные вентиляторы обычно требуют незначительной мощности, и они часто приводятся в действие недорогими и очень неэффективными двигателями.
- Многие вентиляторы с фиксированной скоростью работают в повторно-кратковременном режиме, что дает возможность использовать ЕС-двигатели, работающие на пониженных скоростях.
EC-вентиляторы также настоятельно рекомендуется использовать для модернизации вентиляционных установок. Благодаря регулировке скорости они могут добиться более равномерного распределения температуры. Во многих случаях они могут непрерывно работать на частичной скорости и при этом обеспечивать снижение счетов за коммунальные услуги. Непрерывная циркуляция обеспечивает равномерное распределение свежего воздуха и температуры. Таким образом, вентиляторы с ЕС-двигателями способствуют улучшению циркуляции, комфорту и здоровью.
Поскольку двигатели EC обладают высоким КПД, меньше энергии рассеивается в виде тепла. Это делает ЕС-вентиляторы очень привлекательными для систем охлаждения, поскольку они снижают нагрузку на систему. Высокая эффективность также означает, что меньше энергии теряется в виде звука, что позволяет EC-вентиляторам работать тише.
Это делает ЕС-вентиляторы очень привлекательными для систем охлаждения, поскольку они снижают нагрузку на систему. Высокая эффективность также означает, что меньше энергии теряется в виде звука, что позволяет EC-вентиляторам работать тише.
Почему стоит выбрать ЕС-вентилятор?
Преимущества ЕС-вентиляторов очевидны, поэтому решение о модернизации часто зависит от периода окупаемости. Это можно определить только после проведения анализа профессиональным консультантом по энергетике. Финансовая выгода от модернизации ЕС-вентилятора должна оцениваться в каждом конкретном случае. Однако в целом можно ожидать следующих результатов:
- Чем ниже эффективность заменяемого вентилятора, тем быстрее будет период окупаемости.
- Замена часто используемых вентиляторов обеспечит большую экономию, чем модернизация вентиляторов, которые используются умеренно.
- EC являются привлекательным вариантом для приложений, требующих регулирования скорости. Другие типы двигателей имеют резкое снижение КПД на частичных скоростях.
- Энергосбережение выше, если вентиляторы с ЕС-двигателями устанавливаются в кондиционируемых или охлаждаемых помещениях.
Вентиляторы
 Другие типы двигателей имеют резкое снижение КПД на частичных скоростях.
Другие типы двигателей имеют резкое снижение КПД на частичных скоростях.ЕС-технология сочетает в себе преимущества двигателей переменного и постоянного тока в компактном, но универсальном корпусе. Встроенная электроника обеспечивает оптимальную эффективность даже при частичной нагрузке, что дает значительную возможность сэкономить на эксплуатационных расходах. Внедрение одного из встроенных методов управления — лучший способ в полной мере воспользоваться всеми преимуществами, которые обеспечивают ЕС-вентиляторы.
Вентиляторы CFM с ЕС-двигателями с электронной коммутацией
Continental Fan предлагает широкий выбор моторизованных крыльчаток с ЕС-двигателями. Используя эту передовую технологию, наши ЕС-вентиляторы достигли новых стандартов энергосбережения и производительности.
Вышеупомянутые ЕС-вентиляторы доступны в различных размерах и с различными скоростями для широкого диапазона рабочих режимов. Они также доступны в различных материалах и напряжениях для различных применений.
Они также доступны в различных материалах и напряжениях для различных применений.
Для получения дополнительной информации посетите раздел ЦЕНТРОБЕЖНЫЕ И ОСЕВЫЕ ЕС-ВЕНТИЛЯТОРЫ нашего веб-сайта.
Загрузите PDF-копию нашего EC Motors & Fan Applications сегодня!
Источники
[1] ABB, «Эффективные двигатели NEMA Super-E® Premium», abb.com, октябрь 2014 г. [Онлайн].
Доступно: https://library.e.abb.com/public/e35d57ce4df3160285257d6d00720f51/9AKK106369_SuperE_1014_WEB.pdf. [По состоянию на 2 августа 2019 г.].
[2] Baldor, «Двигатели и приводы постоянного тока 1/50–3000 л.с.», baldor.com, май 2013 г. [онлайн].
Доступно: https://www.baldor.com/mvc/DownloadCenter/Files/BR600. [По состоянию на 2 августа 2019 г.].
[3] Розенберг, «Rosenberg’s EC Motor Construction», youtube.com, январь 2017 г. [Онлайн]. Доступно: https://www.youtube.com/watch?v=4LeTePGMyrE. [По состоянию на 2 августа 2019 г.]
[По состоянию на 2 августа 2019 г.]
Управление синхронными двигателями с постоянными магнитами (PMSM)
Синхронные двигатели с постоянными магнитами (PMSM) являются бесщеточными и обладают очень высокой надежностью и эффективностью. Из-за их ротора с постоянными магнитами они также имеют более высокий крутящий момент при меньшем размере корпуса и отсутствии тока ротора, что является преимуществом перед асинхронными двигателями переменного тока (AICM). Благодаря высокому соотношению мощности и размера, СДПМ могут помочь уменьшить размер вашей конструкции без потери крутящего момента. СДПМ должны быть коммутированы, как двигатели BLDC, но из-за конструкции обмоток форма волны должна быть синусоидальной для хорошей работы. Поскольку для этого требуются более сложные алгоритмы управления, более производительные контроллеры, такие как наши контроллеры цифровых сигналов (DSC) dsPIC33 или наши 32-разрядные PIC32MK или Arm 9.0901 ® Cortex-M ® на базе микроконтроллеров SAM (MCU) были бы отличным вариантом. Мы предлагаем комплексную экосистему, которая поможет вам разработать передовые решения для управления PMSM, такие как бездатчиковое поле-ориентированное управление (FOC). Наши решения также поддерживают синхронные двигатели с постоянными магнитами поверхностного монтажа (SPMSM) и внутренние синхронные двигатели с постоянными магнитами (IPMSM).
Мы предлагаем комплексную экосистему, которая поможет вам разработать передовые решения для управления PMSM, такие как бездатчиковое поле-ориентированное управление (FOC). Наши решения также поддерживают синхронные двигатели с постоянными магнитами поверхностного монтажа (SPMSM) и внутренние синхронные двигатели с постоянными магнитами (IPMSM).
Применение
- Компрессоры кондиционеров и холодильников (AC)
- Стиральные машины с прямым приводом
- Автомобильный электроусилитель руля
- Инструменты для обработки
- Контроль тяги
- Хранение данных
Читать далее
Рекомендуемые продукты для управления СДПМ
Расширенные решения по управлению двигателем СДПМ с использованием DSC dsPIC33 и 32-разрядных микроконтроллеров PIC32MK и SAM
Поскольку двигатели PMSM должны приводиться в действие синусоидальными сигналами, сложность управления возрастает. Наше семейство DSC dsPIC33 предлагает производительность цифровой обработки сигналов (DSP) и усовершенствованные периферийные устройства управления двигателем для генерации сигналов для усовершенствованных алгоритмов управления PMSM, таких как FOC, ослабление потока, бездатчиковое управление и обнаружение опрокидывания. Наши 32-разрядные микроконтроллеры PIC32MK и SAM оснащены высокопроизводительными периферийными устройствами, предназначенными для высокоскоростного управления двигателем с обратной связью. Нажмите на ссылки в таблице ниже, чтобы узнать больше об этих продуктах.
Наше семейство DSC dsPIC33 предлагает производительность цифровой обработки сигналов (DSP) и усовершенствованные периферийные устройства управления двигателем для генерации сигналов для усовершенствованных алгоритмов управления PMSM, таких как FOC, ослабление потока, бездатчиковое управление и обнаружение опрокидывания. Наши 32-разрядные микроконтроллеры PIC32MK и SAM оснащены высокопроизводительными периферийными устройствами, предназначенными для высокоскоростного управления двигателем с обратной связью. Нажмите на ссылки в таблице ниже, чтобы узнать больше об этих продуктах.
Читать далее
Однокристальные драйверы двигателей и затворов
Мы предлагаем полную линейку однокристальных 3-фазных бесщеточных драйверов и 3-фазных бесщеточных драйверов затворов MOSFET для широкого спектра применений двигателей. Эти продукты предназначены для взаимодействия с любым микроконтроллером с помощью простого входа с широтно-импульсной модуляцией (ШИМ) или могут использоваться в автономной конфигурации. Нажмите на продукты, перечисленные в таблице ниже, чтобы узнать больше.
Нажмите на продукты, перечисленные в таблице ниже, чтобы узнать больше.
- Однокристальные драйверы со встроенным полевым МОП-транзистором для управления двигателем СДПМ
- Драйверы затворов MOSFET для управления двигателем PMSM
Читать далее
Некоторые основы синхронных двигателей с постоянными магнитами (СДПМ)
Принцип работы СДПМ
Синхронный двигатель с постоянными магнитами (СДПМ) представляет собой синхронный двигатель переменного тока, возбуждение поля которого обеспечивается постоянными магнитами и который имеет синусоидальную форму обратной ЭДС. . Постоянные магниты позволяют СДПМ создавать крутящий момент при нулевой скорости. PMSM обеспечивают более высокую плотность крутящего момента по сравнению с асинхронными двигателями переменного тока (ACIM), обеспечивая меньший размер корпуса при той же мощности. Они также обеспечивают высокоэффективную работу, но требуют инвертора с цифровым управлением.
PMSM Характеристики
- Отсутствие искр, безопасность во взрывоопасных средах
- Чисто, быстро и эффективно
- Предназначен для высокопроизводительных сервоприводов
- Работает с/без датчиков положения
- Более компактный, эффективный и легкий, чем ACIM
- Обеспечивает оптимальный крутящий момент в сочетании с поле-ориентированным управлением (FOC)
- Плавная работа на низких и высоких скоростях
- Низкий уровень шума и электромагнитных помех
Внедрение управления PMSM
Как это работает
Двигатели PMSM и BLDC обычно могут приводиться в действие либо с помощью шестиступенчатой коммутации, либо с синусоидальной коммутацией. Двигатель должен иметь надлежащую механическую и электрическую конструкцию для достижения преимуществ синусоидального режима, как указано выше. Лучше всего спросить у производителя, какой метод привода лучше всего подходит для данного двигателя. Синусоидальный режим требует более точной обратной связи по положению ротора от двигателя и более сложного алгоритма переключения инвертора. PMSM лучше всего управляется с помощью высокопроизводительного микроконтроллера dsPIC33 DSC, 32-разрядного микроконтроллера PIC32MK или SAM.
Синусоидальный режим требует более точной обратной связи по положению ротора от двигателя и более сложного алгоритма переключения инвертора. PMSM лучше всего управляется с помощью высокопроизводительного микроконтроллера dsPIC33 DSC, 32-разрядного микроконтроллера PIC32MK или SAM.
Читать далее
Функции микроконтроллера для управления PMSM
Полевой контроль (FOC)
FOC использует математические преобразования для получения крутящего момента и магнитного потока двигателя как времени в различных переменных из трехфазной обратной связи по току. Это преобразование позволяет использовать простые методы управления крутящим моментом и скоростью, такие как двигатель постоянного тока.
Читать далее
Поле-ориентированное управление имеет следующие преимущества:
- Синусоидальный привод V/F обеспечивает плавное управление на низких скоростях, но неэффективен на высоких скоростях; FOC обеспечивает плавное управление на низких скоростях, а также эффективное управление на высоких скоростях
- Лучшее в своем классе динамическое реагирование на крутящий момент, эффективность и решение для управления двигателем с наименьшими затратами на систему
Функции микроконтроллера dsPIC33 DSC или PIC32MK и SAM для поддержки FOC:
- Высокопроизводительный АЦП для одновременной выборки напряжения и тока двигателя
- Двигатель цифровой обработки сигналов (DSP) для поддержки:
- Оценка скорости и положения ротора на основе измерения тока двигателя
- Преобразования Кларка и Парка и два пропорционально-интегральных (ПИ) контура для управления крутящим моментом и магнитным потоком
- Выходы контуров PI преобразуются с использованием модуляции пространственного вектора для управления выходами ШИМ управления двигателем
ПЛИС для многоосевого управления двигателем
Создавайте безопасное и надежное многоосевое детерминированное управление двигателем на одной системе на кристалле (SoC) FPGA. ПЛИС обеспечивают множество преимуществ для приложений управления двигателем, в том числе:
ПЛИС обеспечивают множество преимуществ для приложений управления двигателем, в том числе:
- Компактное решение для экономии места на плате и уменьшения размера изделия
- Скорость двигателя превышает 100 000 об/мин для бездатчикового FOC
- Низкая задержка 1 мкс для контура ВОК от измерения АЦП до генерации ШИМ позволяет переключать частоты до 500 кГц.
- Гибкость конструкции благодаря модульному пакету IP
- Расширенные функции безопасности, такие как проскальзывание ротора, обнаружение перегрузки и защита от перегрузки по току
- Интеграция системных функций SoC снижает общую стоимость владения (TCO)
Читать далее
Узнайте больше о FPGAS для управления двигателем
Скачать ресурсы для FPGAS
Аппаратные и программные решения для управления двигателем
Рекомендуемые программные инструменты
MotorBench® Development Suite
MotorBench Development Suite представляет собой инструмент разработки программного обеспечения на основе графического пользовательского интерфейса (GUI) для ориентированного на поле управления (FOC). Он выполняет точное измерение критических параметров двигателя и автоматическую настройку усиления обратной связи, а также генерирует исходный код для MPLAB 9.0901 ® X IDE проект с использованием Motor Control Application Framework (MCAF).
Он выполняет точное измерение критических параметров двигателя и автоматическую настройку усиления обратной связи, а также генерирует исходный код для MPLAB 9.0901 ® X IDE проект с использованием Motor Control Application Framework (MCAF).
Алгоритм приложения для управления двигателем и прикладное программное обеспечение
Для поддержки разработки приложений для двигателей мы предоставляем библиотеки управления двигателями и примеры для ориентированного на поле управления (FOC), ветроэнергетики, компенсации звена постоянного тока, ослабления поля и многих других задач управления алгоритмы.
Библиотека управления двигателем
Библиотека управления двигателем содержит функциональные блоки FOC, оптимизированные для семейства DSC dsPIC33. Функции библиотеки предназначены для использования в рамках любой прикладной среды, предоставляя эффективное и гибкое решение для реализации приложения управления двигателем.
Моделирование управления двигателем
Если вы ищете решение для быстрого прототипирования для использования с MATLAB ® или Scilab ® , наш пакет моделирования позволяет вам скомпилировать Simulink ® в модель, которую можно преобразовать во флэш-память.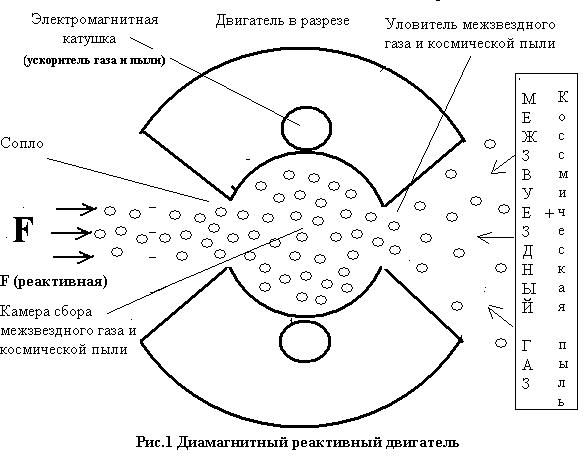 dsPIC ® DSC одним нажатием кнопки. Наборы блоков библиотеки управления двигателем, модель двигателя и макетные платы обеспечивают полную среду разработки управления двигателем.
dsPIC ® DSC одним нажатием кнопки. Наборы блоков библиотеки управления двигателем, модель двигателя и макетные платы обеспечивают полную среду разработки управления двигателем.
MPLAB® X Интегрированная среда разработки (IDE)
MPLAB X Integrated Development Environment (IDE) — это расширяемая программа с широкими возможностями настройки, которая включает в себя мощные инструменты, помогающие обнаруживать, настраивать, разрабатывать, отлаживать и аттестовать встраиваемые конструкции для микроконтроллеров и контроллеров цифровых сигналов Microchip.
Конфигуратор кода MPLAB (MCC)
Конфигуратор кода MPLAB (MCC) — это бесплатная графическая среда программирования, которая создает бесшовный, простой для понимания код C, который можно вставить в ваш проект.
Рекомендуемые аппаратные инструменты
Нет результатов не обнаружили
DSPIC33CK низковольтного моторного управления моторным управлением (LVMC).
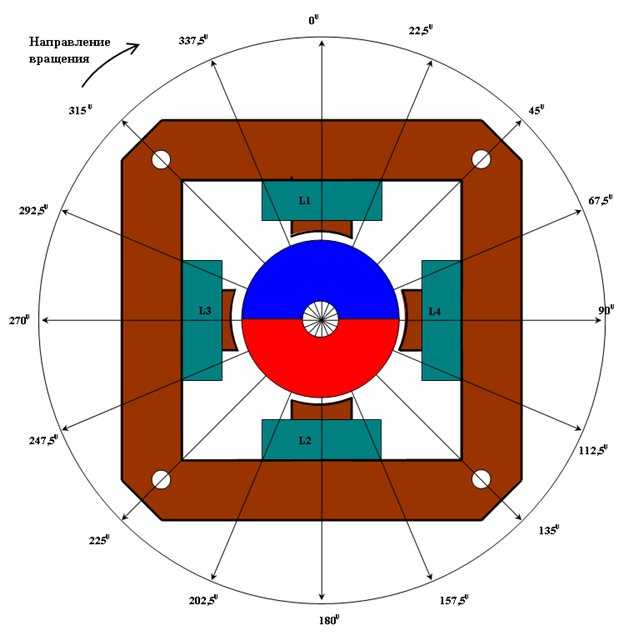 Совет по развитию управления
Совет по развитию управления
Учить больше
Рекомендации по применению и программное обеспечение
Читать далее
Продукты
- dsPIC33 Продукты управления двигателем
- Все микроконтроллеры управления двигателем
- 32-разрядные продукты управления двигателем
- Драйверы трехфазных двигателей
- Драйверы шаговых и щеточных двигателей постоянного тока
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Загрузка
Просмотреть все параметры
Пожалуйста, посетите полную параметрическую диаграмму. Если вы все еще не можете найти
диаграмму, которую вы ищете, пожалуйста, заполните нашу
Форма обратной связи на сайте
чтобы уведомить нас об этой проблеме.
Документация
- Указания по применению
- Брошюры
- Примеры кода
- Программное обеспечение
- Руководства пользователя
- Белая книга
| Заголовок | Скачать |
|---|---|
| Бездатчиковое полеориентированное управление синхронным двигателем с постоянными магнитами с использованием наблюдателя в скользящем режиме | Скачать |
| AN1292 — ВОК с двойным шунтированием и ФАПЧ | Скачать |
| AN984 — Введение в управление асинхронным двигателем переменного тока | Скачать |
| AN1305 — бездатчиковое управление 3-фазным бесколлекторным двигателем с PIC16FXXX | Скачать |
| AN1162 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) | Скачать |
| AN1206 — Бездатчиковое полеориентированное управление (FOC) асинхронным двигателем переменного тока (ACIM) с использованием ослабления поля | Скачать |
| AN2584 — встроенная коррекция коэффициента мощности (PFC) и бездатчиковая | Скачать |
| AN3049 — Бездатчиковое управление положением щеточного двигателя постоянного тока с использованием метода подсчета пульсаций | Скачать |
| AN955 — VF-управление 3-фазным асинхронным двигателем | Скачать |
| AN900 — Управление трехфазными асинхронными двигателями переменного тока с помощью PIC18F4431 | Скачать |
| AN967 — Двунаправленное управление VF одно- и трехфазными асинхронными двигателями с использованием PIC16F72 | Скачать |
| AN887 — Основы асинхронного двигателя переменного тока | Скачать |
| AN889 — VF-управление 3-фазными асинхронными двигателями с использованием микроконтроллеров PIC16F7X7 | Скачать |
| AN2520 — Бездатчиковое полеориентированное управление (FOC) для синхронного двигателя с постоянными магнитами (PMSM) с использованием оценщика PLL и ослабления потока на основе уравнения (FW) Примечание по применению | Скачать |
| AN2757 — Сенсорное (на основе энкодера) полеориентированное управление трехфазным синхронным двигателем с постоянными магнитами (PMSM) | Скачать |
| AN2590 — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка — Бездатчиковый ВОК для СДПМ, использующий наблюдатель Люенбергера уменьшенного порядка Примечание по применению | Скачать |
| AN696 — Серводвигатель постоянного тока PIC18CXXX/PIC16CXXX | Скачать |
| AN843 — Управление скоростью трехфазного асинхронного двигателя с использованием микроконтроллеров PIC18 | Скачать |
| AN822 — микрошаговый шаговый двигатель на PIC18C452 | Скачать |
| AN857 — простое управление бесщеточным двигателем постоянного тока | Скачать |
| Заголовок | Скачать |
|---|---|
| Брошюра по управлению двигателем и приводу | Скачать |
| Заголовок | Скачать |
|---|---|
| CE002 Настройка 10-разрядных аналого-цифровых преобразователей dsPIC DSC для скорости преобразования 1 Мбит/с | Скачать |
| CE019 — Пропорционально-интегрально-дифференциальные (ПИД) регуляторы и управление с обратной связью | Скачать |
| Бездатчиковый анализатор FOC PLL MCLV | Скачать |
| PFC Безсенсорный анализатор FOC PLL MCHV | Скачать |
| CE155 — Пример мониторинга данных в реальном времени (RTDM) | Скачать |
| Заголовок | Скачать |
|---|---|
| Библиотека управления двигателем dsPIC33 для FOC | Скачать |
| Заголовок | Скачать |
|---|---|
| Руководство пользователя макетной платы dsPICDEM MCLV-2 (DM330021-2) | Скачать |
| Руководство пользователя макетной платы dsPICDEM MCSM | Скачать |
| Начальный комплект управления двигателем с руководством пользователя mTouch | Скачать |
| dsPICDEM MCHV-2 Руководство пользователя макетной платы | Скачать |
| Заголовок | Скачать |
|---|---|
| WP100 — Как превратить асинхронный двигатель переменного тока в двигатель постоянного тока (вопрос перспективы) | Скачать |
История вечных двигателей84 Мои теги:
Из Википедии, свободной энциклопедии
Перейти к: навигация, поиск
История вечных двигателей восходит к средневековью. На протяжении тысячелетий было неясно, возможны ли вечные двигатели или нет, но развитие современной термодинамики показало, что они невозможны. Несмотря на это, было предпринято много попыток построить вечный двигатель. Современные дизайнеры и сторонники часто используют другие термины, такие как 9.0121 над единицей , чтобы описать свои изобретения.
На протяжении тысячелетий было неясно, возможны ли вечные двигатели или нет, но развитие современной термодинамики показало, что они невозможны. Несмотря на это, было предпринято много попыток построить вечный двигатель. Современные дизайнеры и сторонники часто используют другие термины, такие как 9.0121 над единицей , чтобы описать свои изобретения.
Содержимое
|
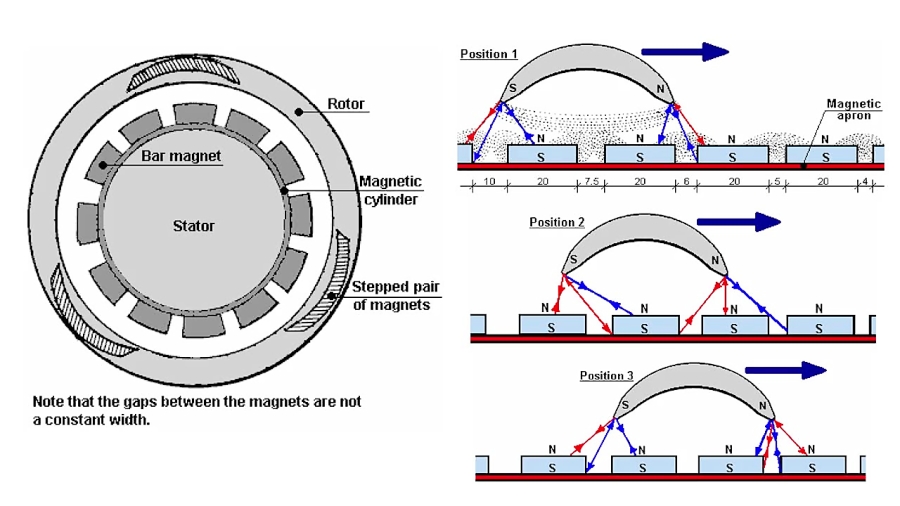 4 Библиография
4 Библиография[править] Хронология истории
|
Вечный двигатель Виллара де Оннекура (ок. 1230 г.) Существует два типа вечного двигателя :
Дополнительные сведения по этой теме см. в разделе Классификация вечных двигателей. |
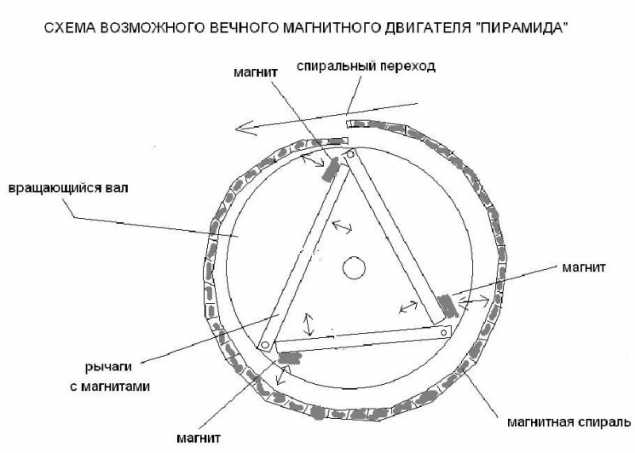
В истории свободной энергии некоторые пытались создать возобновляемые источники энергии и предположительно пострадали от определенных случаев подавления. В настоящее время продолжаются исследования бесплатной энергии без стоимости сырья или с незначительной стоимостью, включая лучистую энергию, солнечную энергию, теллурическую энергию, энергию воды и энергию ветра. Подавление бесплатной энергии — это представление о том, что корпоративные энергетические интересы преднамеренно подавляют технологии, которые могут обеспечивать энергию по очень низкой цене.
[править] Темные века до эпохи Возрождения
[править] До 1800-х годов
- Самые ранние конструкции вечного двигателя датируются 1150 годом индийским математиком-астрономом Бхаскарой II. Он описал колесо, которое, как он утверждал, будет работать вечно. [1]
- В средневековой Баварии волшебное колесо или магнитное колесо, по сути, представляло собой колесо повозки, которое вращалось само по себе. К колесу были прикреплены магниты со свинцовыми пластинами на спине, как сиденья на колесе обозрения. Каждый магнит притягивался к магниту, прикрепленному к основанию на земле. Свинец якобы блокировал притяжение, когда каждый магнит проходил мимо него, поэтому колесо продолжало двигаться какое-то время, прежде чем трение остановило его. [ ссылка необходима ]
- В 13 веке у Виллара де Оннекура был один рисунок в его альбоме для рисования. Оннекур был французским мастером-каменщиком и архитектором. Скетчбук состоит из механики и архитектуры.
- Леонардо да Винчи нарисовал несколько вещей, которые, как он надеялся, будут производить энергию бесплатно. [2] [3] Да Винчи осмотрел несколько разбалансированных колес. [4] Он также разработал центробежный насос и «дымоход». Дымоход использовался для поворота жаровни (турбина реактивного типа). [5]
- Иоганнес Тайснериус, священник-иезуит, описал вечный двигатель на магнитной основе. Магнитная машина Тайснериуса состояла из рампы, магнитного камня и железного шара. Пьер де Марикур ранее заметил такую систему, в которой использовалась сила магнитного камня. Это создает проблемы, потому что линейный интеграл силы на замкнутом контуре в магнитном поле равен нулю. Тайснериус выдал работу Марикура за свою, что объясняет сходство.
- В 1518 году Марк Энтони Зимара сконструировал «самодувную ветряную мельницу». Зимара сконструировал самодувную ветряную мельницу, которая вырабатывала энергию от комплекта мехов. Мехи раздувают паруса ветряной мельницы.
- В 16 веке Джон Ди сообщил, что видел вечный двигатель во время своих путешествий (на пенсию от Елизаветы I), но ему не разрешили рассмотреть его поближе.
- В 1610 году Корнелис Дреббель, алхимик и маг, сконструировал медленный вечный двигатель, который указывал время, дату и время года. Золотая машина была установлена в шаре на столбах и приводилась в действие изменением давления воздуха (герметичная стеклянная ванна с жидкостью, объем которой изменялся в зависимости от изменений атмосферного давления, постоянно перематываясь).
- В 1630 году Роберт Фладд, английский физик и мистик, предложил множество машин. Люди пытались запатентовать варианты машины Фладда в 1870-х годах. Машина Фладда работала за счет рециркуляции с помощью водяного колеса и архимедова винта. Устройство перекачивает воду обратно в собственный резервуар подачи. [6] [7]
- После 1635 года было выдано много английских патентов на вечные двигатели. Несколько вариантов машины, разработанной в Индии 12 века. Первоначальная конструкция представляла собой кабель, уходящий в небо на 150 миль для подачи электричества (технология того времени ограничивала его полезность, поскольку он весил 80 тонн). [8] К 1903 г. было выдано 600 таких патентов.
- В 1638 году Эдвард Сомерсет, 2-й маркиз Вустер, разработал вечный двигатель. Он получил королевское назначение как изобретатель и строитель. Парламент 3 июня 1663 года выдал 99-летний патент на его «водоуправляемую машину» (паровой двигатель). Сомерсет продемонстрировал английскому Карлу I множество водяных колес, которые имели какое-то отношение к вечному двигателю. [9]
- В 1664 году Ульрих фон Кранах, военный инженер из Гамбурга, Германия, сконструировал вечную машину для перемещения шаров, которая на практике не работала. Шаровая машина имела вращающееся пушечное ядро, которое спускалось с помощью архимедова винта по периферии колеса (как водяное колесо), катилось по гусенице, а затем возвращалось наверх с помощью архимедова винта (приводимого в движение шаровым колесом). ). Артур Орд-Хьюм проиллюстрировал эту машину.
- Роберт Бойль изобрел «вечную вазу» («вечный кубок» или «гидростатический парадокс»), которую Дени Папен обсуждал в «Философских трудах» за 1685 год.
- Иоганн Бернулли (также известный как Жан Бернулли) предложил гидроэнергетическую машину. Бернулли разработал проблему брахистохроны в июне 1696 года и считается основоположником вариационного исчисления.
- В 1686 году Георг Андреас Бёклер, немецкий архитектор, инженер и писатель, спроектировал «самодействующие» водяные мельницы с автономным приводом и несколько вечных двигателей, использующих шарики и варианты винтов Архимеда. В одной из машин Бёклера использовалось перебалансированное колесо и архимедов винт.
 К колесу были прикреплены магниты со свинцовыми пластинами на спине, как сиденья на колесе обозрения. Каждый магнит притягивался к магниту, прикрепленному к основанию на земле. Свинец якобы блокировал притяжение, когда каждый магнит проходил мимо него, поэтому колесо продолжало двигаться какое-то время, прежде чем трение остановило его. [ ссылка необходима ]
К колесу были прикреплены магниты со свинцовыми пластинами на спине, как сиденья на колесе обозрения. Каждый магнит притягивался к магниту, прикрепленному к основанию на земле. Свинец якобы блокировал притяжение, когда каждый магнит проходил мимо него, поэтому колесо продолжало двигаться какое-то время, прежде чем трение остановило его. [ ссылка необходима ]  Магнитная машина Тайснериуса состояла из рампы, магнитного камня и железного шара. Пьер де Марикур ранее заметил такую систему, в которой использовалась сила магнитного камня. Это создает проблемы, потому что линейный интеграл силы на замкнутом контуре в магнитном поле равен нулю. Тайснериус выдал работу Марикура за свою, что объясняет сходство.
Магнитная машина Тайснериуса состояла из рампы, магнитного камня и железного шара. Пьер де Марикур ранее заметил такую систему, в которой использовалась сила магнитного камня. Это создает проблемы, потому что линейный интеграл силы на замкнутом контуре в магнитном поле равен нулю. Тайснериус выдал работу Марикура за свою, что объясняет сходство.
 Сомерсет продемонстрировал английскому Карлу I множество водяных колес, которые имели какое-то отношение к вечному двигателю. [9]
Сомерсет продемонстрировал английскому Карлу I множество водяных колес, которые имели какое-то отношение к вечному двигателю. [9]  В одной из машин Бёклера использовалось перебалансированное колесо и архимедов винт.
В одной из машин Бёклера использовалось перебалансированное колесо и архимедов винт.- В 1712 году Иоганн Бесслер, также известный как Орфирей, исследовал 300 различных моделей вечного двигателя и заявил, что владеет секретом вечного двигателя. Хотя обвинения в мошенничестве появились позже (от работавшей у него горничной), следователи того времени, такие как адвокат Виллем Джейкоб с’Гравесанде, не сообщали о таком мошенничестве.
- В 1760-х годах Джеймс Кокс (с помощью Джона Джозефа Мерлина) разработал вечный двигатель (известный как часы Кокса). Часовое устройство питается от изменений атмосферного давления через барометр. Часы все еще существуют сегодня [но были отключены из-за перемещения часов].
- В 1775 году Королевская академия наук в Париже сделала заявление, что Академия « больше не будет принимать и рассматривать предложения, касающиеся вечного двигателя ». Аргументация заключалась в том, что вечный двигатель создать невозможно, а его поиск отнимает много времени и очень дорого. По мнению членов академии, эти светлые умы, посвящающие свое время и ресурсы этому поиску, могли бы быть использованы гораздо лучше в других, более разумных начинаниях. Тем не менее, многие люди продолжали предлагать и строить различные «вечные» машины, стремясь достичь своей конечной цели — свободной энергии. [ ссылка необходима ]
- В 1790 году доктор Конрад Шивьерс изготовил колесо с ременным приводом. Он также предложил машину, в которой несколько шаров приводили в движение водяное колесо и ковшовую цепь (снова поднимающую шары). Другие безуспешно пытались адаптировать его проекты столетие спустя.
 По мнению членов академии, эти светлые умы, посвящающие свое время и ресурсы этому поиску, могли бы быть использованы гораздо лучше в других, более разумных начинаниях. Тем не менее, многие люди продолжали предлагать и строить различные «вечные» машины, стремясь достичь своей конечной цели — свободной энергии. [ ссылка необходима ]
По мнению членов академии, эти светлые умы, посвящающие свое время и ресурсы этому поиску, могли бы быть использованы гораздо лучше в других, более разумных начинаниях. Тем не менее, многие люди продолжали предлагать и строить различные «вечные» машины, стремясь достичь своей конечной цели — свободной энергии. [ ссылка необходима ] [править] Промышленные революции
[править] 1800-е годы
- В 1812 году Чарльз Редхеффер из Филадельфии заявил, что разработал «генератор», который может питать другие машины. В ходе расследования было установлено, что питание направлялось от другой подключенной машины. Роберт Фултон разоблачил схемы Редхеффера во время выставки устройства в Нью-Йорке (1813 г. ). Удалив несколько скрывающих деревянные планки, Фултон обнаружил, что ременная передача с кошачьей кишкой проходит через стену на чердак. На чердаке мужчина крутил рукоятку, чтобы включить устройство. [10] [11] [12]
- В 1827 году сэр Уильям Конгрив, английский изобретатель и пионер в области ракетостроения, испытал машину, работающую на капиллярном действии, которая не подчинялась бы закону никогда не подниматься выше собственного уровня, чтобы производить непрерывный подъем и переполнение. Устройство имело наклонную плоскость над шкивами. Вверху и внизу проходит бесконечная полоса губки, ложа и, поверх нее, снова бесконечная лента тяжелых грузов, соединенных вместе. Весь стоит над поверхностью неподвижной воды. Конгрив считал, что его система будет работать непрерывно. [13] [14] [15]
- В 1866 году Генри Принц Британский описал первый частично погруженный в воду вечный двигатель.
- В 1868 году австриец Алоис Драш получил в США патент на машину, обладавшую «упорно-шпоночной передачей» роторного двигателя. Водитель транспортного средства мог наклонять желоб в зависимости от необходимости. Тяжелый шар катился в цилиндрическом желобе вниз, и Драш считал, что при непрерывной регулировке рычагов устройства и выходной мощности можно будет привести в действие транспортное средство. [16]
- В 1870 году Э. П. Уиллис из Нью-Хейвена, штат Коннектикут, заработал деньги на «запатентованном» вечном двигателе. История о слишком сложном устройстве со скрытым источником энергии появляется в статье журнала Scientific American « Величайшее открытие, когда-либо сделанное ». Исследование устройства в конечном итоге обнаружило источник энергии, который приводил его в действие. [17]
- Сообщается, что Джон Эрнст Уоррелл Кили изобрел двигатель с асинхронным резонансом. Предполагается, что он использовал эфирную «технологию». В 1872 году Кили объявил, что открыл принцип производства энергии, основанный на колебаниях камертонов. Ученые исследовали его машину, которая работала на воде, хотя Кили старался этого избежать. Вскоре после 1872 года венчурные капиталисты обвинили Кили в мошенничестве (они потеряли почти пять миллионов долларов). Машина Кили, как выяснилось после его смерти, была основана на скрытых трубках для подачи воздуха.
- В 1881 году Джон Гэмджи разработал машину для производства жидкого аммиака, которая могла работать при температуре кипения за счет испарения под действием лучистого тепла. Результирующее расширение приводило бы в движение поршень. Однако пар не конденсируется в жидкость, чтобы снова начать цикл, что делает систему неработоспособной. Военно-морской флот одобрил устройство и показал его президенту Джеймсу Гарфилду.
- В 1899 году Дж. М. Олдрич был арестован за то, что привлек инвесторов для своей машины свободной энергии. Олдрич так и не был осужден. Сообщается, что он продолжал управлять своей схемой. В конечном итоге заинтересованный инвестор при осмотре устройства обнаружил скрытую пружину.
- У Марка Энтони Зимара из Италии была огромная машина с пневматическим приводом (по сути, это еще одна попытка создать самовсасывающий ветряк). [18] Его устройство описано в книге Талмэджа Г. Кастена « Вечный двигатель Марка Энтони Зимара ».
- Американец Хорас Уикмэм получил патент на машину с множеством вращающихся шариков.
- Шотландский сапожник, известный как Спенс , разработал магнитную машину, которая позже была дискредитирована. [ ссылка необходима ]
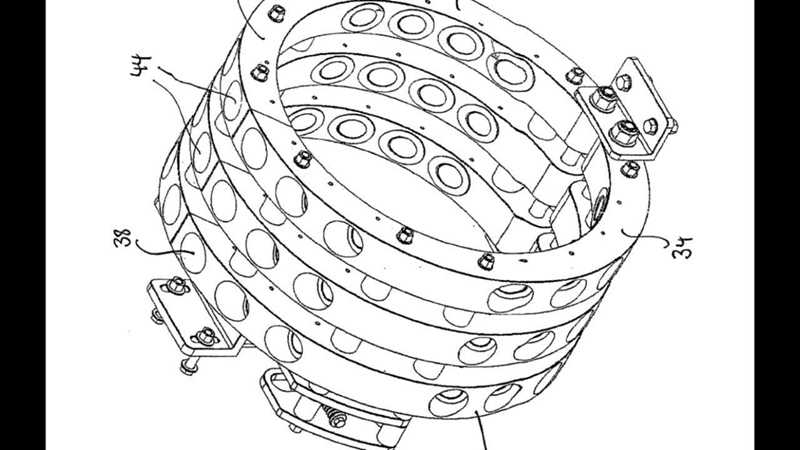 ). Удалив несколько скрывающих деревянные планки, Фултон обнаружил, что ременная передача с кошачьей кишкой проходит через стену на чердак. На чердаке мужчина крутил рукоятку, чтобы включить устройство. [10] [11] [12]
). Удалив несколько скрывающих деревянные планки, Фултон обнаружил, что ременная передача с кошачьей кишкой проходит через стену на чердак. На чердаке мужчина крутил рукоятку, чтобы включить устройство. [10] [11] [12]  Водитель транспортного средства мог наклонять желоб в зависимости от необходимости. Тяжелый шар катился в цилиндрическом желобе вниз, и Драш считал, что при непрерывной регулировке рычагов устройства и выходной мощности можно будет привести в действие транспортное средство. [16]
Водитель транспортного средства мог наклонять желоб в зависимости от необходимости. Тяжелый шар катился в цилиндрическом желобе вниз, и Драш считал, что при непрерывной регулировке рычагов устройства и выходной мощности можно будет привести в действие транспортное средство. [16] 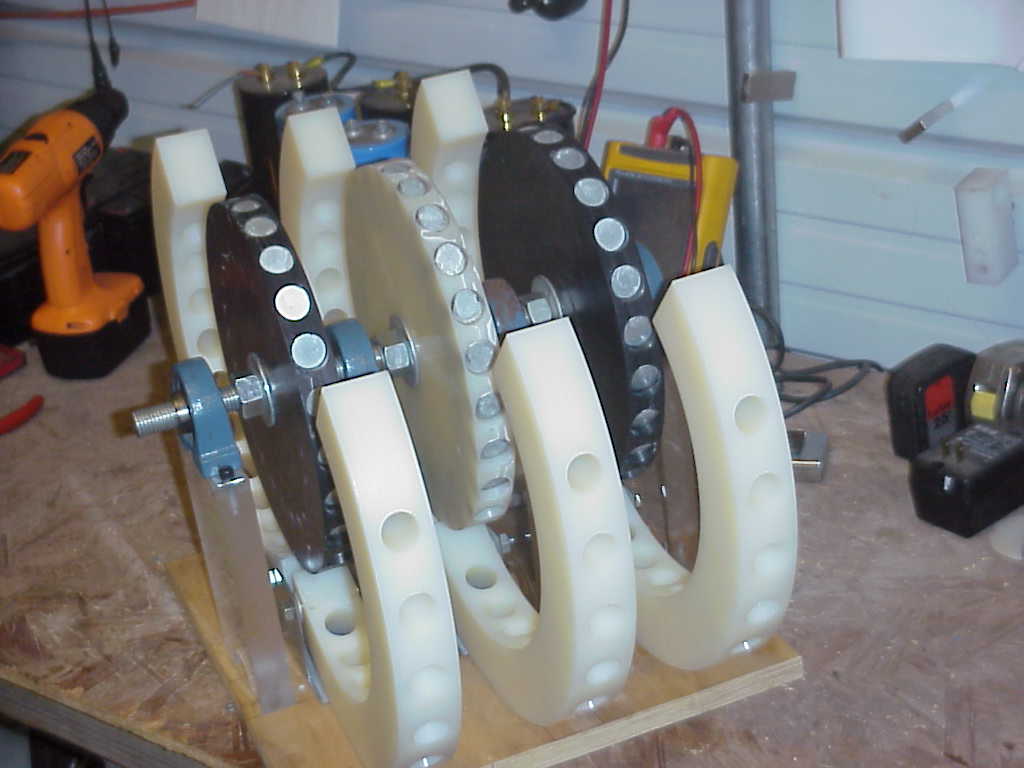 Вскоре после 1872 года венчурные капиталисты обвинили Кили в мошенничестве (они потеряли почти пять миллионов долларов). Машина Кили, как выяснилось после его смерти, была основана на скрытых трубках для подачи воздуха.
Вскоре после 1872 года венчурные капиталисты обвинили Кили в мошенничестве (они потеряли почти пять миллионов долларов). Машина Кили, как выяснилось после его смерти, была основана на скрытых трубках для подачи воздуха. [18] Его устройство описано в книге Талмэджа Г. Кастена « Вечный двигатель Марка Энтони Зимара ».
[18] Его устройство описано в книге Талмэджа Г. Кастена « Вечный двигатель Марка Энтони Зимара ».[править] с 1900 по 1950 год
- В 1900 году Никола Тесла заявил, что открыл абстрактный метод, на котором основан вечный двигатель второго рода. Прототип не производился. Сербско-американский физик-изобретатель написал:
| » | Отход от известных методов — возможность «самодействующего» двигателя или машины, неодушевленной, но способной, как живое существо, извлекать энергию из среды — идеальный способ получения движущей силы. | » |
- В 1917 году у португальского химика Джона Эндрюса был зеленый порошок, который, как он утверждал и продемонстрировал, может превращать воду в газ (называемый «добавкой газ-вода»). Сообщается, что он убедил чиновника ВМФ, что это сработало. Эндрюс исчез после начала переговоров. Лаборатория Эндрюса была обшарена и растрепана во время ответного визита представителей USN.
- В 1917 году Гарабед Т.К. Гирагосян, как сообщается, обманным путем, разработал машину свободной энергии. Якобы замешанный в заговоре, Вудро Вильсон подписал резолюцию, предлагающую ему защиту. Устройство представляло собой гигантский маховик, который медленно заряжался энергией и выдавал много энергии всего за секунду. [19] [20]
- В 1910-х и 1920-х годах Гарри Перриго из Канзас-Сити, выпускник Массачусетского технологического института, заявляет о разработке устройства свободной энергии. Перриго утверждал, что источник энергии был «из воздуха» или из эфирных волн. Перриго продемонстрировал устройство перед Конгрессом США 15 декабря 1917 года. У Перриго была ожидающая рассмотрения заявка (подана 31 декабря 1925 года; серийный номер 78 719) на «Улучшение метода и устройства для накопления и преобразования электрической энергии эфира». Следователи сообщают, что в его устройстве был спрятан мотор. [21] [22] [23]
- В 1920-х годах Томас Генри Морей продемонстрировал «устройство лучистой энергии» многим людям, которые не смогли найти скрытый источник энергии.
- 9 июня 1925 года Герман Плаусон получает патент США 1 540 998 , в котором искровые разрядники используются для преобразования атмосферной энергии. [24]
- В 1928 году Лестер Хендершот уговорил армейского коменданта одобрить его машину свободной энергии. По словам его сыновей, записи Лестера были утеряны. [25] [26]
- 8 марта 1928 года Эдгар Кейси из Чикаго, штат Иллинойс, описывает «Двигатели без топлива» (чтение 4665-1). [27] [28]
- В 1946 году Джон Серл якобы создал Генератор на Эффекте Серла (SEG), который он видел, как построить в повторяющемся сне [29]
- После 1940-х годов Говард Роберт Джонсон разрабатывает двигатель с постоянными магнитами. Он получает патент США US4151431[2] 24 апреля 1979 года. О дальнейшей судьбе его устройства мало информации. [30] [31] [32] [33]
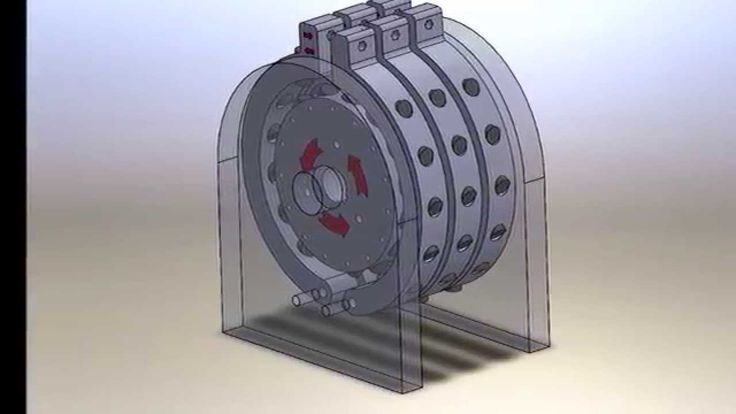 Сообщается, что он убедил чиновника ВМФ, что это сработало. Эндрюс исчез после начала переговоров. Лаборатория Эндрюса была обшарена и растрепана во время ответного визита представителей USN.
Сообщается, что он убедил чиновника ВМФ, что это сработало. Эндрюс исчез после начала переговоров. Лаборатория Эндрюса была обшарена и растрепана во время ответного визита представителей USN. Следователи сообщают, что в его устройстве был спрятан мотор. [21] [22] [23]
Следователи сообщают, что в его устройстве был спрятан мотор. [21] [22] [23]  Он получает патент США US4151431[2] 24 апреля 1979 года. О дальнейшей судьбе его устройства мало информации. [30] [31] [32] [33]
Он получает патент США US4151431[2] 24 апреля 1979 года. О дальнейшей судьбе его устройства мало информации. [30] [31] [32] [33] [править] Современная эра
[править] 1951-1980
- Виктор Шаубергер утверждал, что обнаружил в воде некую особую вихревую энергию. После его смерти в 1958 году люди до сих пор изучают его работы. [34]
- Пауль Бауманн, немецкий инженер, разрабатывает машину под названием «Тестатика». Работа устройства была зарегистрирована еще в 1960-х годах в месте под названием Метернита (недалеко от Берна, Швейцария). Предположительно, общество получает выгоду от изобретения. [ ссылка необходима ]
- В 1962 году физик Ричард Фейнман постулировал броуновский храповик, который будет извлекать значимую работу из броуновского движения, хотя он продолжал демонстрировать, как такое устройство не работает на практике.
- В 1966 году Йозеф Папп (иногда называемый Джозеф Папп или Джозеф Папф ) предположительно разработал альтернативный автомобильный двигатель, в котором использовались инертные газы. Он привлек несколько инвесторов, но когда двигатель был публично продемонстрирован, в результате взрыва один из наблюдателей погиб и двое других получили ранения. Г-н Папп обвинил в аварии вмешательство физика Ричарда Фейнмана, который позже поделился своими наблюдениями в статье в LASER, Journal of the Southern Californian Skeptics. [35] Папп продолжал принимать деньги, но так и не продемонстрировал другой двигатель.
- У Гвидо Франча, как сообщается, был процесс превращения атомов воды в высокооктановые соединения бензина (названные Мота-топливо ), который снизил цену бензина до 8 центов за галлон. В этом процессе участвовал зеленый порошок (это утверждение может быть связано с аналогичными утверждениями Джона Эндрюса (1917)). В 1954 году он предстал перед судом за мошенничество, но был оправдан; но в 1973 году был осужден. Судья Уильям Бауэр и судья Филип Ромити наблюдали за демонстрацией в 1954 дело. [36] [37] [38]
- В 1958 году Отис Карр из Оклахомы основал компанию по производству космических кораблей и кораблей на воздушной подушке в стиле НЛО. Карр продал акции для этого коммерческого предприятия. Он также продвигал машины свободной энергии. Среди прочего, он утверждал, что его вдохновлял Никола Тесла. С 2004 года Деннис Ли (изобретатель) использует свои устройства. [39] [40]
- Дэвид МакКлинток утверждал, что использует воздух в качестве топлива, и имел патент (US2982261 [зарегистрирован на Клео Л. МакКлинток ]). «Пневматический двигатель МакКлинтока» описывается как гибрид дизельного двигателя и роторного двигателя. Сообщается, что он не потреблял обычное топливо и работал автономно (приводил в действие внутренний воздушный компрессор). Устройство имело три цилиндра со степенью сжатия 27:1, генерировало высокий крутящий момент, производило тепло и имело солнечную и планетарную передачи. [41] [42] [43]
- Сообщается, что Эдвин В. Грей разрабатывает двигатель электромагнитной ассоциации (EMA). В скептическом исследовании устройства было отказано (и ни одно нейтральное или знающее лицо не тестировало устройство. Скептики заявляют, что устройство содержит «разряженные» батареи). Якобы он неэтично привлекает финансирование от инвесторов. Грей умер 19 апреля.89, при загадочных обстоятельствах. [44] [45] [46]
- В 1970-х годах Дэвид Хэмел производит устройство Hamel [ необходима ссылка ]
- В 1977 году Арнольд Бёрк, религиозный человек, разрабатывает устройство, названное «Иеремия 33:3» (библейский отрывок гласит: « Воззови ко мне, и я отвечу тебе, и поведаю тебе великие и сокровенные вещи, которые ты не знал «). Берк собирает 800 000 долларов инвестиций для своего « самодействующий насос ». В 1979 году проводится открытое испытание, и, как сообщается, следователи обнаруживают скрытый источник питания электричества. Позже Берк и его партнеры собирают 250 000 долларов, чтобы заплатить за обвинение в мошенничестве. Берк до сих пор утверждает, что его устройство работает. [47 ]
- 20 декабря 1977 года Эмиль Т. Хартман получил патент США 4 215 330 под названием « Двигательная установка с постоянными магнитами ». (ред., это устройство связано с простой магнитной игрушкой Overunity (SMOT))
- В 1977 году Роберт Джордж Адамс (Новая Зеландия) разрабатывает двигатель Адамса. У Адамса было много теорий об эфире. Он стремился получить патенты на свою работу (и получил патент Великобритании, GB2282708, совместно с Гарольдом Аспденом). Споры по поводу измерения мощности двигателя все еще ведутся. Говорят, что Адамсу около 80 лет, он имеет научное образование и рассуждает об альтернативной физике. [48] [49] [50] [51] [52] [53] [54] [55] [56]
- В 1978 году Роберт Стюарт разработал фреоновую машину, которая могла работать при температуре замерзания за счет испарения за счет лучистого тепла для двигателя с замкнутым циклом. Однако пар не конденсируется в жидкость, чтобы снова начать цикл, что делает систему неработоспособной. Этот дизайн может быть связан с работой Джона Гэмджи (1882 г.). Сообщается, что Стюарт получил более 3 000 000 долларов инвестиционных денег (в основном от фермеров). Позже Стюарт исчез.
- Рори Джонсон из Элгина, штат Иллинойс, заявляет о разработке магнитного двигателя, работающего на основе процесса холодного синтеза, активируемого лазером. Устройство весило 475 фунтов (215 кг). Сообщалось, что источником топлива было 2 фунта (1 кг) дейтерия. Сообщается, что устройство выдает 525 л.с. (391 кВт). Джонсон заявил, что он проедет на большом грузовике или автобусе 100 000 миль (160 000 км). Джонсон заключил несколько контрактов на свое устройство. Позже Джонсон перевез все свое лабораторное оборудование в Калифорнию и вскоре умер. [57] [58]
- В 1978 году физик Р. Джезеф Маглих заявил о разработке сверхъединичного устройства, которое контролировало и использовало термоядерную энергию из морской воды. Это может быть связано с термоядерным генератором, впервые разработанным доктором Богданом Маглишем в Принстоне, штат Нью-Джерси (в 1973 году). [59] [60] [61] [62]
- 14 февраля 1978 г. Дэниел Бейкер получил патент США № 4 074 153 под названием «9».0121 Магнитный движитель «,
 Он привлек несколько инвесторов, но когда двигатель был публично продемонстрирован, в результате взрыва один из наблюдателей погиб и двое других получили ранения. Г-н Папп обвинил в аварии вмешательство физика Ричарда Фейнмана, который позже поделился своими наблюдениями в статье в LASER, Journal of the Southern Californian Skeptics. [35] Папп продолжал принимать деньги, но так и не продемонстрировал другой двигатель.
Он привлек несколько инвесторов, но когда двигатель был публично продемонстрирован, в результате взрыва один из наблюдателей погиб и двое других получили ранения. Г-н Папп обвинил в аварии вмешательство физика Ричарда Фейнмана, который позже поделился своими наблюдениями в статье в LASER, Journal of the Southern Californian Skeptics. [35] Папп продолжал принимать деньги, но так и не продемонстрировал другой двигатель. Карр продал акции для этого коммерческого предприятия. Он также продвигал машины свободной энергии. Среди прочего, он утверждал, что его вдохновлял Никола Тесла. С 2004 года Деннис Ли (изобретатель) использует свои устройства. [39] [40]
Карр продал акции для этого коммерческого предприятия. Он также продвигал машины свободной энергии. Среди прочего, он утверждал, что его вдохновлял Никола Тесла. С 2004 года Деннис Ли (изобретатель) использует свои устройства. [39] [40]  Скептики заявляют, что устройство содержит «разряженные» батареи). Якобы он неэтично привлекает финансирование от инвесторов. Грей умер 19 апреля.89, при загадочных обстоятельствах. [44] [45] [46]
Скептики заявляют, что устройство содержит «разряженные» батареи). Якобы он неэтично привлекает финансирование от инвесторов. Грей умер 19 апреля.89, при загадочных обстоятельствах. [44] [45] [46]  Хартман получил патент США 4 215 330 под названием « Двигательная установка с постоянными магнитами ». (ред., это устройство связано с простой магнитной игрушкой Overunity (SMOT))
Хартман получил патент США 4 215 330 под названием « Двигательная установка с постоянными магнитами ». (ред., это устройство связано с простой магнитной игрушкой Overunity (SMOT))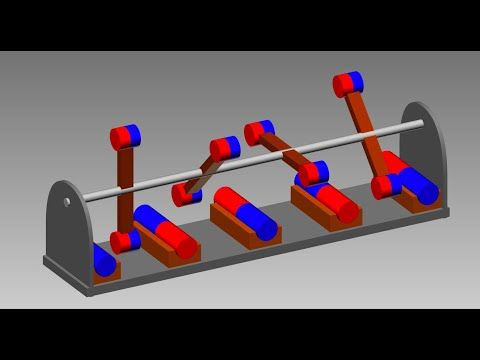 Этот дизайн может быть связан с работой Джона Гэмджи (1882 г.). Сообщается, что Стюарт получил более 3 000 000 долларов инвестиционных денег (в основном от фермеров). Позже Стюарт исчез.
Этот дизайн может быть связан с работой Джона Гэмджи (1882 г.). Сообщается, что Стюарт получил более 3 000 000 долларов инвестиционных денег (в основном от фермеров). Позже Стюарт исчез.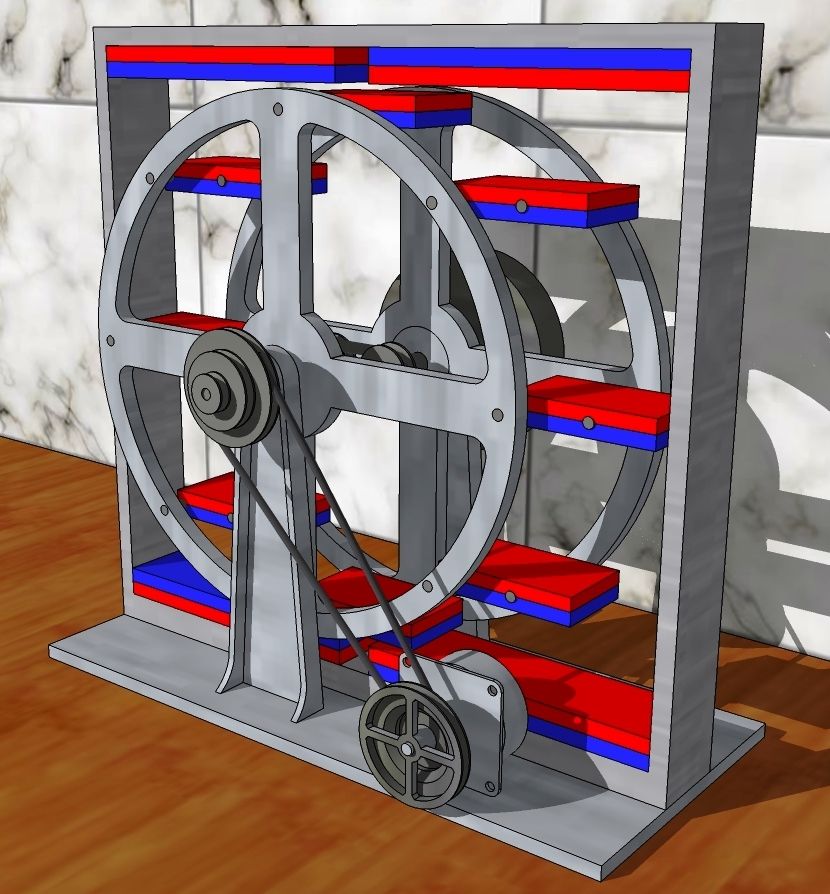 [59] [60] [61] [62]
[59] [60] [61] [62] - В 1979 году Ховард Р. Джонсон получает патент США 4 151 431 под названием « Двигатель с постоянными магнитами ».
- Кит Кеньон заявляет о разработке сверхединичного устройства. В расчетах, похоже, не учитывался коэффициент мощности (также известный как фазовый угол). Демонстрация никогда открыто не подключала выход к своему входу.
- Билл Мюллер и Кармен Мюллер, оба из Германии, разрабатывают «Мотор-генератор Мюллера». Они собирают инвестиции для устройства. Как сообщается, демонстрации и проверки работающей модели не проводилось. [64] [65] [66]
- Стивен Уокер начинает продвигать двигатель с постоянными магнитами. Стивен утверждает, что с ноября 2002 года рабочие образцы будут доступны по почте. К 12 декабря того же года Стивен отменяет предложение (контакт недоступен). По состоянию на 2004 год снова перспективное устройство.
 К 12 декабря того же года Стивен отменяет предложение (контакт недоступен). По состоянию на 2004 год снова перспективное устройство.
К 12 декабря того же года Стивен отменяет предложение (контакт недоступен). По состоянию на 2004 год снова перспективное устройство.[править] с 1981 по 1999 год
- В 1984 году Джозеф Ньюман заявляет о разработке устройства свободной энергии, основанного, как сообщается, на альтернативной физике. Ньюман подал в суд на патентное ведомство США, чтобы оно признало его устройство. Предыдущий анализ устройства неправильно измерил истинную выходную мощность машины. При расчете мощности не учитывался несинусоидальный потребляемый ток. Ньюман, изначально открытый для тестирования, теперь (как сообщается) отказывается отправлять модуль для тестирования. В 1970-х годов Ньюман провел недельную демонстрацию в Луизиане Супердоум в Новом Орлеане (присутствовало 9000 человек со всей страны). Ньюман судится с некоторыми бывшими инвесторами, которые, как он утверждает, пытаются украсть дизайн.
- В 1984 году преобразователь Kromery [67] предполагал использование эффектов резонанса для перезарядки свинцово-кислотной батареи. Светящиеся претензии сделаны для его производительности.
- В 1985 году Грег Уотсон из Австралии заявил о разработке Простая магнитная игрушка Overunity (SMOT). В SMOT стальной шар под действием магнетизма поднимается вверх по наклонной поверхности, а затем падает, так что магнитная энергия преобразуется в кинетическую энергию. Уотсон утверждает, что затем происходит эффект, называемый «перекалибровка», позволяющий повторить процесс без применения внешней энергии. В 1997 году он продает комплекты для устройства. Скептики заявляют, что попытки воспроизвести потерпели неудачу. Сообщается, что инвесторы не смогли вернуть свои вложения.
- Джон Бедини заявил о разработке нескольких устройств свободной энергии. [68] [69] [70] Бедини, как сообщается, отказался разрешить независимое расследование.
- В 1986 году Брюс Де Пальма заявил о разработке сверхобъединительной машины (называемой « N-Machine » или « N Machine »), которая была описана как униполярный генератор с замкнутым контуром с выходной мощностью, в четыре раза превышающей потребляемую. . В нем использовался цельный ротор, а не современные электрические генераторы, состоящие из двух частей: ротора и статора. По сути, это был намагниченный гироскоп. Де Пальма не хотел помогать независимым исследователям, таким как PSITRON, анализировать его устройство. Один профессор электротехники проанализировал это устройство, но скептики утверждают, что исследование содержало ошибку измерения. Де Пальма был соратником Ричарда К. Хогланда. Де Пальма умер в 1997. [71] [72] [73] [74] [75] [76]
- С 1988 года Деннис Ли обещал продемонстрировать бесплатное электричество. Ли утверждает, что у него есть двигатель Фишера, устройство встречного вращения (CRD) и сверхобъемный двигатель. Ли имеет смесь религиозных и экстремистских политических убеждений. Ли инвестировал в усилия Джона Серла, усилия Стэнли Мейера, а в 2001 году присоединился к Полу Пантону в турне по штату США. Том Напье считает, что устройство Ли, возможно, воскресило проекты Гэмджи (1881 г. ). [77]
- Стефан Маринов, болгарский физик, заявляет о разработке машины свободной энергии. Маринов, якобы, измерил абсолютную скорость и направление Млечного Пути внутри закрытой комнаты по « первое означает » и « третье означает ». Маринов утверждает, что с ним связался Метернита « культ » и он раскрыл их тайну. Прежде чем обнародовать информацию, он покончил жизнь самоубийством 15 июля 1997 года. [78] [79]
- Рейдар Финсруд из Фрогна, Норвегия, разрабатывает «движущуюся скульптуру», в которой, как он утверждает, металлический шар теоретически может двигаться вечно без внешнего воздействия. Он утверждает, что шар будет продолжать двигаться, «пока скульптура не развалится». Сообщается, что мяч движется без перерыва в течение многих дней. [80] [81] [82] [83] [84] [85]
- Д-р Юрий С. Потапов из Кишинева, Молдова, заявляет о разработке (и впоследствии продаже) сверхединичного электротермального генератора на водной основе (называемого «Юсмар 1»). Он основал компанию YUSMAR для продвижения своего устройства. Как сообщается, устройство не сработало, и инвесторы не смогли вернуть свои вложения. [86] [87] [88] [89]
- CETI заявила о разработке устройства, которое вырабатывает аномальное (хотя и небольшое) количество тепла — возможно, холодный синтез. Скептики утверждают, что данные могут быть связаны с неточными измерениями эффектов трения от охлаждающего потока через гранулы. Джед Ротвелл (редактор журнала Infinite Energy Magazine) утверждает, что «испытания элементов CETI в Motorola, SRI и Французской комиссии по атомной энергии не показали заметного трения».0901 [90] [91]
- Парамахамса Тевари из Индии заявил о разработке устройства, которое представляет собой электрический генератор с КПД 200%. (Скептики утверждают, что его измерения сомнительны). [92] [93] [94] [95]
- Брюс Перро заявил об открытии нового элемента, разработал плазмотрон, сконструировал ионный насос и разрабатывает несколько устройств «лучистой энергии». [96] [97] [98]
- Брайан Коллин из Австралии утверждает, что получил откровение от Бога, которое вдохновило его на создание устройства для получения свободной энергии. Инвесторы не смогли вернуть свое финансирование (около 80 000 долларов). Нет доступной информации (по состоянию на 2004 г.) о том, тестировалась ли конструкция.
- Примерно в 1990 году Дон Уоттс из Лас-Вегаса заявил о разработке блока центробежного усиления и преобразования энергии (CEACU). Ходят слухи, что на устройство был запатентован. Как сообщается, устройства были частью схемы мошенничества с инвестициями. [99] [100] [101]
- В 1990-х годах Каваи и Такахаши, оба из Японии, заявили, что независимо друг от друга разработали магнитные двигатели. Сообщается, что они были оценены компанией Magnetic Power, Inc. По словам исследователей, ни одно из протестированных устройств не показало избыточной работы под нагрузкой. Скептики утверждают, что это не что иное, как разрядка батарей. Сообщается, что в Японии выданы патенты как на двигатель Takahashi , так и на двигатель Takahashi .0121 Каваи двигатель . Предполагается, что двигатель Takahashi используется в мотороллере, который может ездить на большие расстояния на одной батарее (со скоростью около 50 миль в час). По последним сообщениям, производство двигателя началось, и изобретатель расширяет возможности двигателя для управления автомобилями. [102] [103] [104] [105] [106] [107] [108]
- В 1991 году Трой Рид из Оклахомы заявил о разработке прототипа небольшого двигателя с постоянными магнитами (а позже и более крупного двигателя). Устройство состоит из постоянных магнитов, размещенных на четырех дисках (по восемь на каждом). Два внешних диска неподвижны. Два внутренних установлены на общем вращающемся валу. Компания Reed выдала лицензии на производство двигателя и получила инвестиционные деньги на сверхобъединительное устройство. [109] [110] [111] [112]
- В 1996 году Стэнли Мейер из округа Фейет, штат Огайо, заявляет о разработке автомобиля с водным двигателем. Мейер получил более 28 патентов. У Мейера есть смесь христианства и патриотической политики, переплетенных с протонаучной теорией. Мейер был признан виновным в мошенничестве (после испытания водяного топливного элемента перед судьей из Огайо). Мейера преследовали не за изобретение, а за продажу «дилерских центров». Мейер отказался от независимых измерений и исследований своего устройства. Мейерс умер в начале 1998. [113] [114] [115] [116]
- В январе 1998 года Барбара Хикокс из Нью-Мексико объявляет о владении патентом US4249096, Electric Dynamo (1981). Устройство состоит из центрального вращающегося спирального непроводящего цилиндра, в который помещены небольшие цилиндрические постоянные магниты (один полюс наружу). Стоимость систем, как сообщается, составляет около 7500 долларов. Сообщается, что Хикокс разработал устройство вместе с Говардом Хьюзом и его летчиком-испытателем. Скептики утверждают, что система основана на « fusion power «. [117] [110] [118]
- В 1999 году Санджай Амин из Янгстауна, штат Огайо, основал Entropy Systems Inc. (ESI). Компания получила 3,5 миллиона долларов инвестиций в устройство, которое, как утверждается, нарушает второй закон термодинамики, производя энергию за счет поглощения тепла из атмосферного воздуха (и этот внешний резервуар может иметь любую температуру (даже минусовую)). Технология была запатентована в США, Европе и Австралии. Технология была протестирована экспертами Ford Motor Company, Университета Янгстауна, Университета Пердью и Университета штата Пенсильвания. Скептики утверждают, что в предыдущих исследованиях была ошибка измерения. [119] [120] [121] [122] [123] [124]
- В 1999 году Роберт «Пол» ЛеБретон объявил о разработке « Millennium Motor » (по сути, двигателя с постоянными магнитами). Устройство, предположительно, работает без топлива или автомобильных аккумуляторных батарей. Сообщается, что прототип мощностью 600 лошадиных сил (447 кВт) был построен. Скептики утверждают, что он психически неуравновешенный. [125]
- В 1999 году Ренцо Босколи из Италии заявил, что разработал метод низкоэнергетических ядерных реакций. Босколи не продемонстрировал и не представил доказательств, обещанных следователям журнала Infinite Energy Magazine. [126] [127] [128]
 Светящиеся претензии сделаны для его производительности.
Светящиеся претензии сделаны для его производительности. . В нем использовался цельный ротор, а не современные электрические генераторы, состоящие из двух частей: ротора и статора. По сути, это был намагниченный гироскоп. Де Пальма не хотел помогать независимым исследователям, таким как PSITRON, анализировать его устройство. Один профессор электротехники проанализировал это устройство, но скептики утверждают, что исследование содержало ошибку измерения. Де Пальма был соратником Ричарда К. Хогланда. Де Пальма умер в 1997. [71] [72] [73] [74] [75] [76]
. В нем использовался цельный ротор, а не современные электрические генераторы, состоящие из двух частей: ротора и статора. По сути, это был намагниченный гироскоп. Де Пальма не хотел помогать независимым исследователям, таким как PSITRON, анализировать его устройство. Один профессор электротехники проанализировал это устройство, но скептики утверждают, что исследование содержало ошибку измерения. Де Пальма был соратником Ричарда К. Хогланда. Де Пальма умер в 1997. [71] [72] [73] [74] [75] [76]  ). [77]
). [77]  Он основал компанию YUSMAR для продвижения своего устройства. Как сообщается, устройство не сработало, и инвесторы не смогли вернуть свои вложения. [86] [87] [88] [89]
Он основал компанию YUSMAR для продвижения своего устройства. Как сообщается, устройство не сработало, и инвесторы не смогли вернуть свои вложения. [86] [87] [88] [89]  [96] [97] [98]
[96] [97] [98] 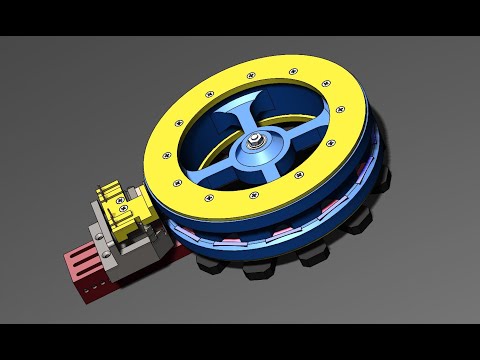 Скептики утверждают, что это не что иное, как разрядка батарей. Сообщается, что в Японии выданы патенты как на двигатель Takahashi , так и на двигатель Takahashi .0121 Каваи двигатель . Предполагается, что двигатель Takahashi используется в мотороллере, который может ездить на большие расстояния на одной батарее (со скоростью около 50 миль в час). По последним сообщениям, производство двигателя началось, и изобретатель расширяет возможности двигателя для управления автомобилями. [102] [103] [104] [105] [106] [107] [108]
Скептики утверждают, что это не что иное, как разрядка батарей. Сообщается, что в Японии выданы патенты как на двигатель Takahashi , так и на двигатель Takahashi .0121 Каваи двигатель . Предполагается, что двигатель Takahashi используется в мотороллере, который может ездить на большие расстояния на одной батарее (со скоростью около 50 миль в час). По последним сообщениям, производство двигателя началось, и изобретатель расширяет возможности двигателя для управления автомобилями. [102] [103] [104] [105] [106] [107] [108]  [109] [110] [111] [112]
[109] [110] [111] [112]  Сообщается, что Хикокс разработал устройство вместе с Говардом Хьюзом и его летчиком-испытателем. Скептики утверждают, что система основана на « fusion power «. [117] [110] [118]
Сообщается, что Хикокс разработал устройство вместе с Говардом Хьюзом и его летчиком-испытателем. Скептики утверждают, что система основана на « fusion power «. [117] [110] [118] 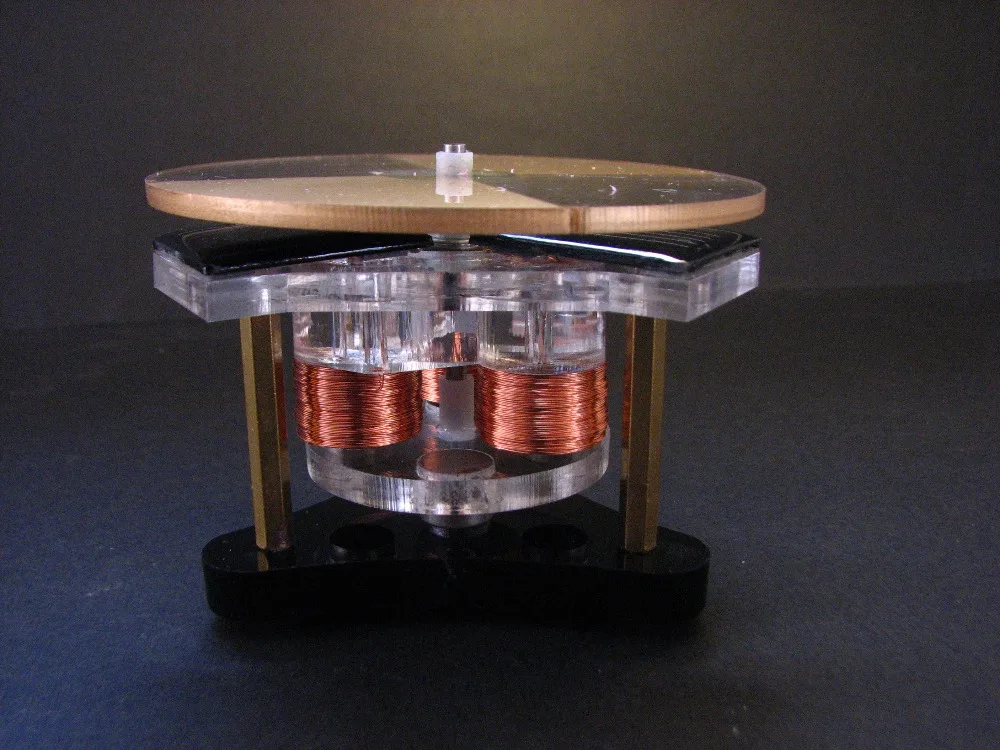 Устройство, предположительно, работает без топлива или автомобильных аккумуляторных батарей. Сообщается, что прототип мощностью 600 лошадиных сил (447 кВт) был построен. Скептики утверждают, что он психически неуравновешенный. [125]
Устройство, предположительно, работает без топлива или автомобильных аккумуляторных батарей. Сообщается, что прототип мощностью 600 лошадиных сил (447 кВт) был построен. Скептики утверждают, что он психически неуравновешенный. [125] [править] 21 век
В начале 21 века ископаемое топливо было все еще относительно дешевым, но растущие опасения по поводу энергетической безопасности, глобального потепления и возможного истощения ископаемого топлива привели к расширению интереса ко всем доступным формам альтернативной энергии. . Неуклонный рост цен на нефть после 2003 г. привел к росту опасений по поводу неизбежности пика добычи нефти, что еще больше повысило интерес к коммерческой ветроэнергетике.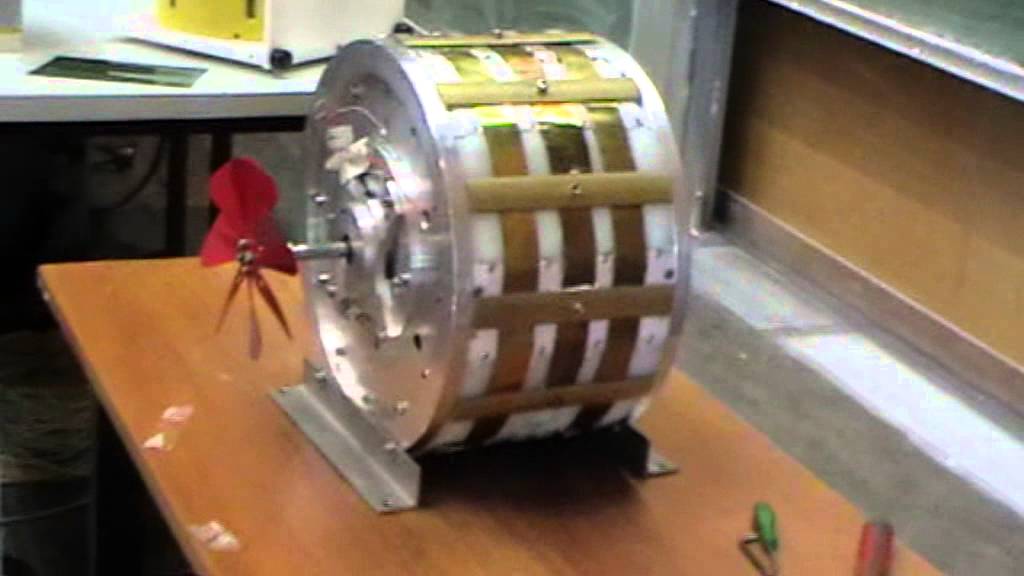 Более ранние нефтяные потрясения уже заставили многих коммунальных и промышленных потребителей нефти перейти на уголь или природный газ. У природного газа начались проблемы с поставками, а энергия ветра показала потенциал для замены природного газа при производстве электроэнергии.
Более ранние нефтяные потрясения уже заставили многих коммунальных и промышленных потребителей нефти перейти на уголь или природный газ. У природного газа начались проблемы с поставками, а энергия ветра показала потенциал для замены природного газа при производстве электроэнергии.
[править] 2000-е
- В 2001 году Карл Тилли и Роберт Кибби из Теннесси заявили, что построили сверхединичное устройство. Демонстрация 9 февраля 2001 г. провалилась, и с тех пор они не предпринимали попыток проведения демонстрации.
- В 2001 году австралийская фирма Lutec рекламирует Lutec1000, который, как утверждается, имеет 6-кратное увеличение энергии [3]. Статус изобретения группы: «дата выпуска отложена на неопределенный срок из-за возможных переговоров о передаче технологии» [129] .
- В 2002 году группа GWE (Genesis World Energy) заявила, что 400 человек разработали некое устройство, которое, по-видимому, разделяет воду на H9.0196 2 и O 2 с меньшим потреблением энергии, чем обычно считается возможным. Никаких независимых подтверждений их заявлений так и не было сделано, а в 2006 году основатель компании Патрик Келли был приговорен к пяти годам тюрьмы за кражу средств у инвесторов [130] .
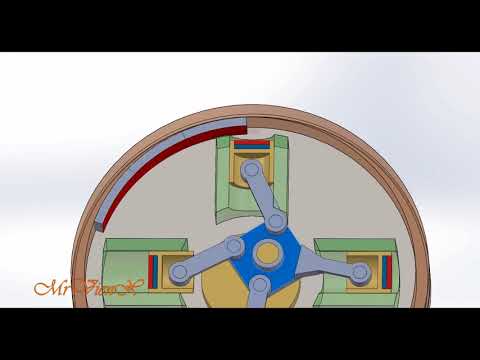 Никаких независимых подтверждений их заявлений так и не было сделано, а в 2006 году основатель компании Патрик Келли был приговорен к пяти годам тюрьмы за кражу средств у инвесторов [130] .
Никаких независимых подтверждений их заявлений так и не было сделано, а в 2006 году основатель компании Патрик Келли был приговорен к пяти годам тюрьмы за кражу средств у инвесторов [130] .- 26 марта 2002 г. пятью изобретателями: Стивеном Л. Патриком, Томасом Э. Берденом, Джеймсом К. Хейсом, Джеймсом Л. Кенни и Кеннет Д. Мур. Пока еще нет рабочего прототипа, и в 2006 году Берден заявил, что ему все еще нужно от 10 до 12 миллионов долларов для разработки коммерческого продукта на основе технологии 9.0901 [131] .
- В 2006 году компания Steorn Ltd. заявила, что построила сверхединичное устройство на основе вращающихся магнитов, и разместила рекламу, призывающую ученых проверить их утверждения. Процесс отбора двенадцати начался в сентябре 2006 г. и завершился в декабре 2006 г. [132] Отобранное жюри начало расследование требований Стеорна. Публичная демонстрация, запланированная на 4 июля 2007 г., была отменена по «техническим причинам». [133]
- В конце 2006 года Erke Energy Research and Engineering Corporation, расположенная в Стамбуле, Турция, заявила, что произвела генератор свободной энергии, «основанный на принципе инерции». Других подробностей не было
- В начале 2008 года Тейн Хейнс заявил, что разработал вечный двигатель на основе «обратной электродвижущей силы (обратной ЭДС)», которую он назвал Перепитейя.
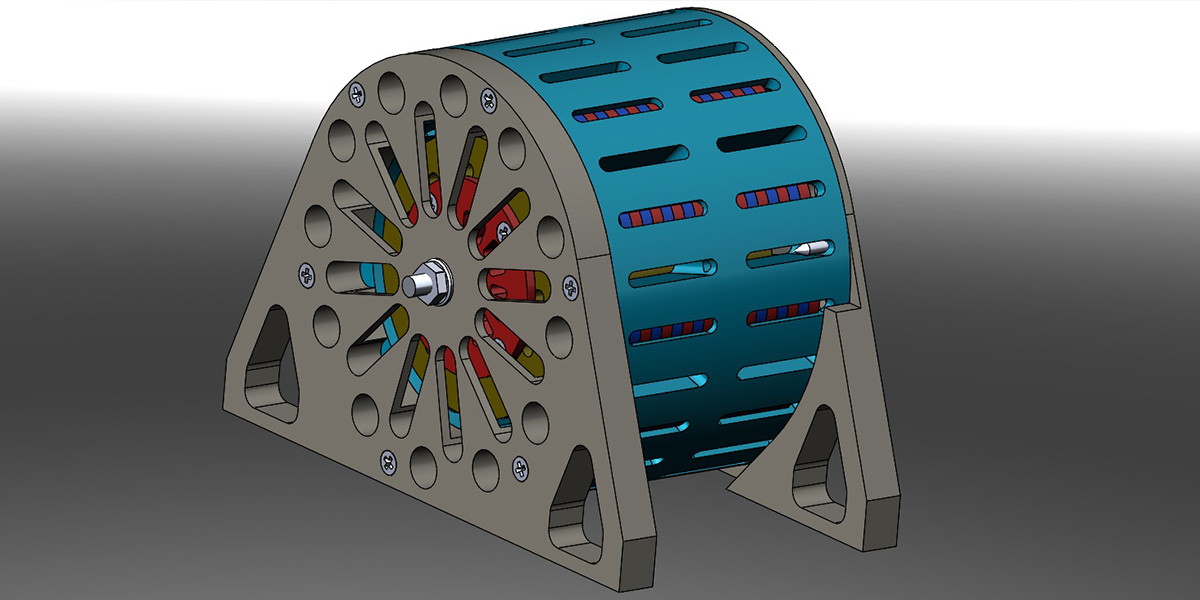 [133]
[133] [править] Ссылки
[править] Общая информация
- Криг, Эрик, « История Эрика о вечном двигателе и машинах со свободной энергией ». (изд., Эта статья основана на работе Крига. )
[править] Информационные ресурсы
- Аллан, Стерлинг Д., « Изобретатели свободной энергии ». 11 декабря 2003 г.
- Ханс-Питер, « Хронология вечного двигателя «. Вечный двигатель HP.
- Макмиллан, Дэвид М. и др., « Паутина катящегося шара, онлайн-сборник скульптур, часов и т. д. катящегося шара ».
- Линхард, Джон Х., « Вечный двигатель ». Двигатели нашей изобретательности, 1997.
- Гусева Мария, » Предполагаемое создание вечного источника энергии раскололо научное сообщество ». Правда.ру.
- « Патенты на нерабочие устройства «. Музей неисправных устройств.
- « Пионеры вечного двигателя (Двигатели и шейкеры) «. Музей неисправных устройств.
- Энциклопедия 1911 года, « вечный двигатель «. LoveToKnow, корп.
- Боэс, Алекс, « Музей мистификаций «.
- Килти, Кевин Т., « Вечный двигатель ». 1999.
- Берден, Том, « ВЕЧНЫЙ ДВИГАТЕЛЬ ПРОТИВ «РАБОТАЮЩИХ МАШИН, СОЗДАЮЩИХ ЭНЕРГИЮ ИЗ НИЧЕГО» 9 Первоначально на http://steorn.net/en/news.aspx?p=2&id=981
- Орд-Юм, Артур В.Дж. Г., « Вечный двигатель: история одержимости ». Нью-Йорк, издательство Сент-Мартинс. 1977. ISBN 0-312-60131-X
- Ангрист, Стэнли В. , « Вечный двигатель ». Научный американец. Январь 1968 года.
- » Инструкции по сборке вечного двигателя без использования воды или груза «.
- Чайлдресс Х., Дэвид, Справочник по устройству свободной энергии (Волшебное колесо и др.)
- История солнечных батарей
- История ветроэнергетики
- Коммерциализация возобновляемых источников энергии
- Сборка
- Местные блюда
- См. полную галерею
- См. полную галерею
- Обзор 360°

[править] Библиография
.
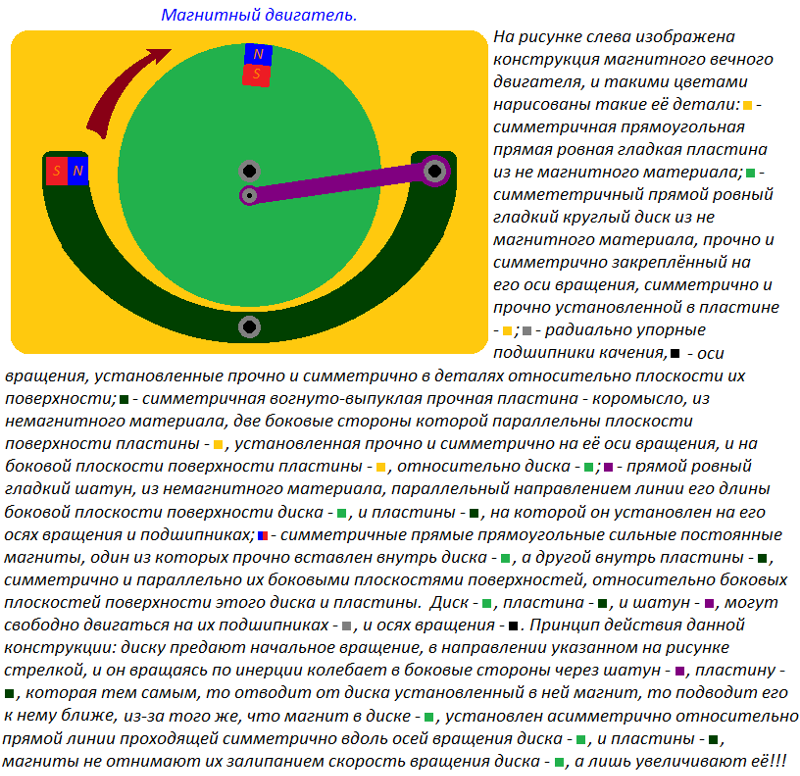 , « Вечный двигатель ». Научный американец. Январь 1968 года.
, « Вечный двигатель ». Научный американец. Январь 1968 года.[править] См. также
|
RAV4 Prime 2022 года | Возьмите на себя ответственность за свой путь.
RAV4 Prime Специальные предложения
Откройте для себя местные специальные предложения и предложения с ограниченным сроком действия уже сегодня.
Посмотреть предложения
ПЕРЕТАЩИТЕ, ЧТОБЫ ПОВЕРНУТЬ
Silver Sky Metallic/Midnight Black Metallic Roof
Цены и цвета могут различаться в зависимости от модели.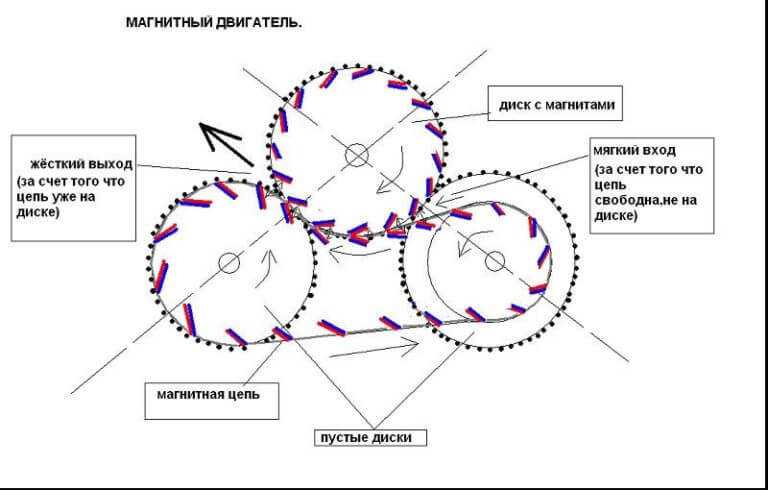
Prius Prime Specials
Откройте для себя местные специальные предложения и предложения с ограниченным сроком действия уже сегодня.
Посмотреть предложения
Часто задаваемые вопросы Загрузить брошюру Найти аксессуары Платежный калькулятор
Гарантия на батарею гибридного автомобиля
Спокойствие перед долгим путешествием. Каждая гарантия Toyota Hybrid Battery для моделей 2022 года распространяется на 10 лет с даты первого использования или на 150 000 миль пробега, в зависимости от того, что наступит раньше.
Каждая гарантия Toyota Hybrid Battery для моделей 2022 года распространяется на 10 лет с даты первого использования или на 150 000 миль пробега, в зависимости от того, что наступит раньше.
Подробнее
302 л.с.
RAV4 Prime с впечатляющей совокупной чистой мощностью 302 л.с. является нашим самым мощным RAV4.
Полный привод
Стандартная система полного привода (AWD) на RAV4 Prime разработана для обеспечения оптимальной тяги и потрясающей производительности.
Электрифицированный привод
Наслаждайтесь эффективностью 42-мильной поездки на полностью заряженном электромобиле, рассчитанной Агентством по охране окружающей среды, , и продолжайте движение вместе с оценкой Агентства по охране окружающей среды 94 мили на галлон.
Посмотреть все функции производительности
9-дюймовый мультимедийный дисплей
Повысьте удобство благодаря доступному 9-дюймовому дисплею RAV4 Prime. мультимедийный дисплей.
Проекционный дисплей
Получайте всю необходимую информацию о вождении прямо перед собой с помощью проекционного дисплея RAV Prime (HUD).
USB-порты и Qi-совместимая беспроводная зарядка
Пять USB-портов и Qi-совместимая беспроводная зарядка 9Пэд 2932 поможет вам зарядиться энергией.
Посмотреть все технологические характеристики
Подрулевые лепестки
Больше контроля. Больше острых ощущений. Доступные подрулевые лепестки переключения передач передают мощность RAV4 прямо в ваши руки.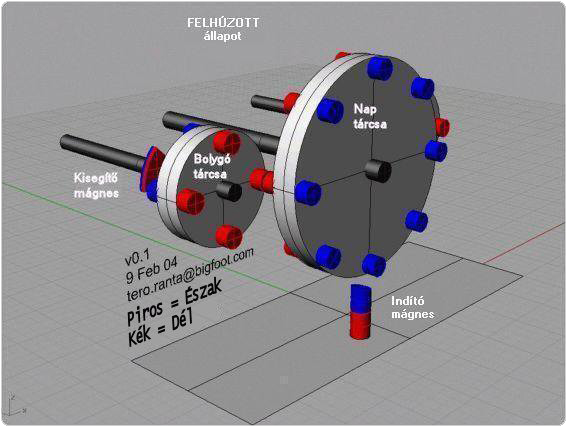
Передние сиденья премиум-класса
Сиденье водителя RAV4 Prime имеет электроприводную регулировку в 8 направлениях и поясничную опору, а переднее и пассажирское сиденья оснащены многоступенчатым подогревом.
Панорамная крыша
Доступная панорамная стеклянная крыша готова расширить обзор на открытое небо.
Посмотреть все элементы интерьера
Награды и признание
Награды и признание
2022 Toyota Rav4 Prime — это IIHS TSP+
См. Обзоры и детали
См. Обзор и подробности
9000
5. RAV4 Prime в сравнении с конкурентами
См. подробные сравнения
См. подробные сравнения
Оценщик платежей
Оценщик платежей
Используйте инструмент расчета платежей, чтобы оценить варианты оплаты.
См. способы оплаты
См. способы оплаты
Просмотреть еще
Мультимедиа в дороге
Мультимедиа в дороге
Наслаждайтесь мультимедийной системой с интеграцией Apple CarPlay ® для вашего iPhone ® , Android Auto ™ для совместимых устройств Android ™ , совместимость с Amazon Alexa и SiriusXM ® (включает 3-месячную пробную подписку на план Platinum).
См.