Автопилот своими рукам. Добавляем электронное управление steer-by-wire на обычный автомобиль. Автопилот руки
Автопилот своими рукам. Добавляем электронное управление steer-by-wire на обычный автомобиль / Хабр
Всем привет. Любому автопилоту, очевидно, нужно не только принимать решения по управлению, но и заставлять автомобиль этим решениям подчиняться. Сегодня увидим, как весьма доступными средствами доработать обычный автомобиль полностью электронным рулевым управлением (steer-by-wire). Оказывается, сам авто для разработки не очень и нужен, а большинство функционала можно с комфортом отлаживать дома или в офисе. В главных ролях всем известные компоненты из хобби-магазинов электроники.
Задумаемся на секунду, что нужно для системы электронного управления? Сервопривод, который может поворачивать колёса, и контроллер, чтобы сервоприводом управлять. Внезапно, всё это в большинстве современных автомобилей уже есть, и называется "усилитель рулевого управления". Традиционные чисто механические (как правило, гидравлические) усилители стремительно исчезают с рынка, уступая место узлам с электронным блоком управления (ЭБУ). А значит, задача сразу упрощается: нам остается только "уговорить" имеющийся ЭБУ усилителя выдать нужные команды на сервопривод.
Очень удобным для доработки оказался KIA Cee'd начиная с 2015 модельного года (скорее всего аналогично и его соплатформенники от KIA/Hyundai). Сошлись одновременно несколько факторов:
- Усилитель руля полностью электрический, нет возни с гидравликой, стоит копейки (относительно) на разборках. Вся нужная проводка выведена наружу и легко доступна.
- Усилитель интегрирован с рулевой колонкой, поэтому к нему есть легкий доступ на автомобиле и любая дополнительная электроника останется в салоне в тепличных условиях (в отличие от усилителей, интегрированных в рулевую рейку).
- Очень важно — есть пример успешной доработки аналогичного KIA Soul. Американская PolySync разрабатывает апгрейд Soul до полностью drive-by-wire платформы для беспилотников, и на их гитхабе можно подсмотреть много полезного.
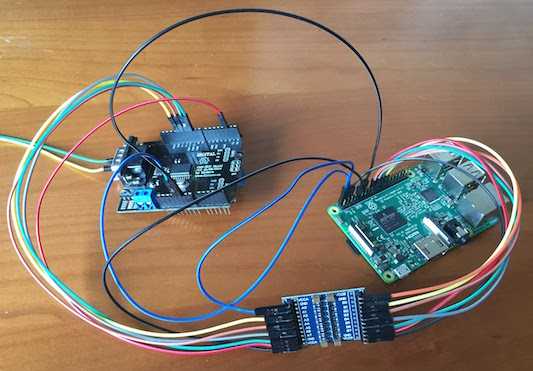
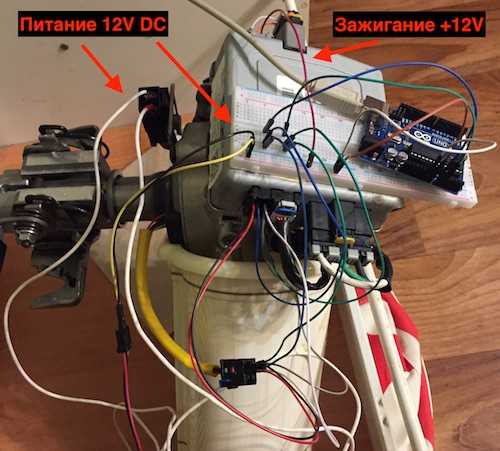
Итак, получена в распоряжение рулевая колонка в сборе:

Будем заставлять её крутиться. Для этого нужно создать у блока управления впечатление, что
- Он находится в автомобиле с работающим двигателем.
- Водитель прикладывает вращающее усилие к рулевому колесу.
Пойдем по порядку.
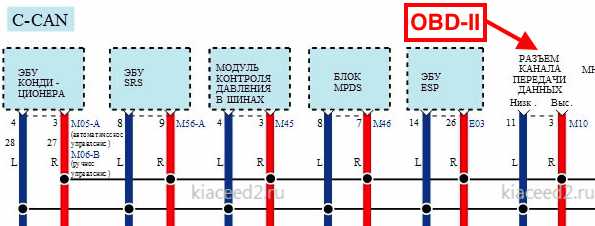
Нужно понять интерфейс между электронным блоком управления (ЭБУ) усилителя и остальным автомобилем. Нагуглив электрическую схему видим картинку:
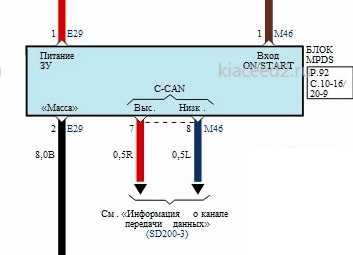
Из схемы видно, что физически интерфейс очень прост:
- Питание (12V постоянное) через разъем E29.
- Сигнал включенного зажигания (12V) через разъем M46.
- CAN-шина данных также через разъем M46.
Внешний вид и распиновки разъемов находим на том же сайте.
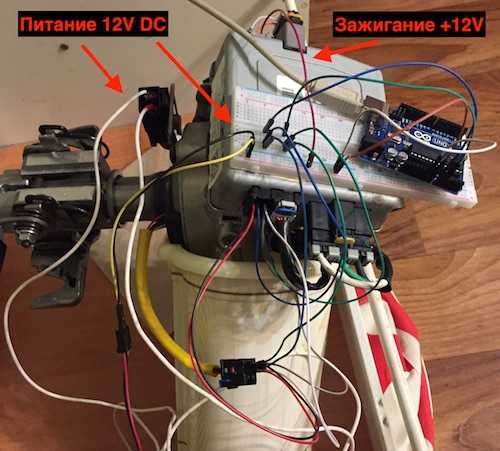
С питанием и зажиганием всё просто, берем 12V с обычного компьютерного блока питания. Но если просто подать питание и зажигание, усилитель полноценно не включится, и усиливать не будет. Дополнительно нужна информация от других блоков автомобиля: работает ли двигатель (чтобы не тратить энергию аккумулятора при выключенном), текущая скорость (чтобы делать руль "тяжелее" на скорости), наверняка что-то ещё.
Обмен данными между электронными блоками в современных автомобилях организован по шинам CAN (Controller Area Network). Это широковещательная (у пакетов нет адресов назначения) локальная сеть на витой паре, где каждый блок может публиковать свои данные. У каждого типа данных свой идентификатор. Например, в нашем случае усилитель руля рассылает значения угла поворота руля с ID 0x2B0. Часто бывает несколько физически разделенных шин, чтобы второстепенные блоки типа контроллеров стеклоподъемников не мешались обмену между критически важными компонентами. В Cee'd используется две шины: C-CAN и B-CAN (схема здесь, в части "Информация о канале передачи данных"). На C-CAN "висят" почти все блоки с ней и будем работать.
Выбор адаптера CAN-шины
Первым делом понадобится CAN интерфейс для компьютера. Детальный обзор возможных решений есть например здесь, цены варьируются от десятков до сотен долларов. По устройствам у нас относительно доступны:
- Адаптеры в сборе с алиэкспресса. Их не пробовал, по слухам довольно много брака и софт видимо только под Windows.
- Arduino шилды на MCP2515/MCP2551, в основном клоны дизайна от seeed в любом магазине ардуинной тематики. Но совмещать такой шилд надо не с Arduino (я так и не смог заставить связку работать на воспроизведение с нужной скоростью), а с Raspberry Pi. В приложении ниже подробная инструкция.
- USB адаптер CANHacker Baby, разработка Artemka86. Выгодно отличается от вариантов с алиэкспресса отличной поддержкой "из первых рук" от разработчика (проверено лично, Артём подходит к делу с душой). Также плюсом является поддержка стандартного протокола LAWICEL совместимого с широким набором софта.
Софта разного тоже много (за обзором опять сюда). Самый простой вариант — Linux c can-utils из SocketCAN, за который спасибо инженерам Volkswagen. Большой плюс SocketCAN в стандартизации — любое USB устройство с поддержкой протокола LAWICEL (pdf) видится системой как обычный сетевой интерфейс. Таким образом избегаем привязки к вендор-специфическому софту конкретного устройства. У текущей версии CANHacker есть небольшая несовместимость со стоковыми can-utils по работе с USB, поэтому берём патченную версию отсюда. Raspberry Pi с CAN шилдом работает со стоковым пакетом can-utils из Raspbian OS без проблем.
Подключение к шине, запись пакетов
С подключением к индивидуальному узлу на стенде всё просто: соединяем контакт CAN-High адаптера с CAN-High автомобильного узла, CAN-Low — c CAN-Low. По стандарту между CAN-High и CAN-Low должно быть 2 замыкающих резистора по 120 Ом, на практике обычно всё работает на довольно широком интервале сопротивлений, у меня например одно на 110 Ом.
На автомобиле замыкающий резистор не нужен (они там уже стоят, чтобы шина сама по себе работала). В зависимости от модели авто, возможно придется повозиться с физическим доступом к проводке шины. Самый удобный вариант — разъём OBD-II (on-board diagnostic), он обязателен на всех легковых автомобилях, выпущенных в Европе с начиная 2001-2004 года и находится не дальше 60 см от рулевого колеса. На Cee'd разъём слева под рулём, за пластмасовой крышкой блока предохранителей.

Распиновка OBD-II стандартизована и включает шину CAN (CANH на 6 контакте, CANL на 14). Нам повезло, корейцы пошли по пути наименьшего сопротивления и вывели C-CAN, на которой висят все важные узлы, прямо на диагностический разъём:
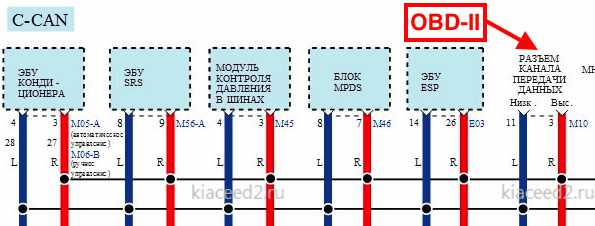
В результате на Cee'd можно прослушать весь внутренний трафик, ничего в авто не разбирая. Когда машина не твоя, а знакомые пустили повозиться — большой плюс. Но такая халява не везде. У Volkswagen например служебная CAN изолирована от OBD шлюзом, поэтому подключаться пришлось бы примерно так:

Подключив все контакты, поднимаем сетевой интерфейс:
$ sudo slcand -o -c -s6 -S 115200 ttyACM0 slcan0 && sleep 1 && sudo ifconfig slcan0 upПроверяем, что сеть работает и данные принимаются (включив зажигание):
$ cansniffer slcan0И наконец, если всё нормально, можно записывать лог:
$ candump -L slcan0 > real-car-can-log.txtЗдесь нужно запустить двигатель, т.к. усилитель руля включается на собственно усиление только при работающем двигателе, а нам на стенде надо, чтобы он усиливал.
Воспроизведение записи шины на стенде
С записанным логом с авто можно возвращаться на стенд и приступать к обману нашего одинокого усилителя. Первым делом вспомним, что в автомобиле стоит свой собственный усилитель, он тоже шлёт данные в CAN шину, и эти пакеты есть и в нашем логе. Отфильтруем их, чтобы избежать конфликтов. Подключаемся к усилителю на стенде, смотрим, что он выдает:
Видим, что рассылаются пакеты 2B0 (текущий угол поворота руля) и, реже, 5E4 (какой-то общий статус усилителя). Отфильтровываем их из общего лога:
$ cat real-car-can-log.txt | grep -v ' 2B0' | grep -v ' 5E4 ' > can-log-no-steering.txtФильтрованный лог можно подавать на воспроизведение:
% sudo ifconfig slcan0 txqueuelen 1000 $ canplayer -I can-log-no-steering.txtЕсли всё сработало успешно, усилитель заработает, крутить рукой рулевой вал станет гораздо легче. Итак, работать в штатном режиме мы узел заставили, можно переходить к симуляции усилий на руле.
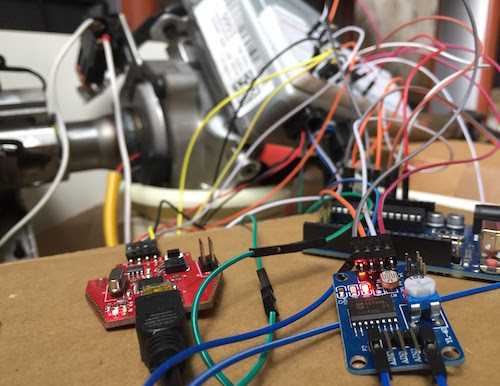
Крутящий момент на рулевом валу и угол поворота измеряются встроенным блоком датчиков, от которого идет жгут проводов к блоку управления усилителем:

Блок управления обрабатывает сигналы датчиков и выдаёт команды сервоприводу на создание дополнительного усилия на поворот рулевого вала.
Проверка формата сигнала датчиков
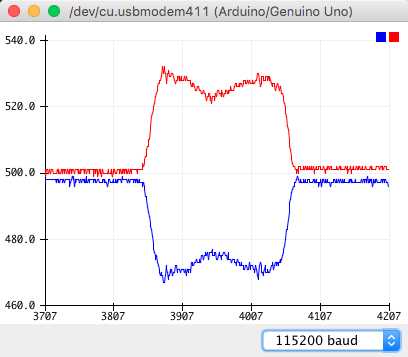
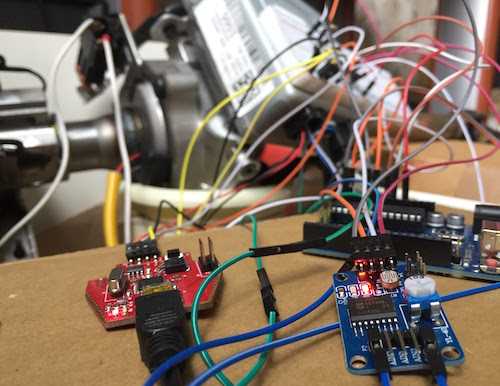
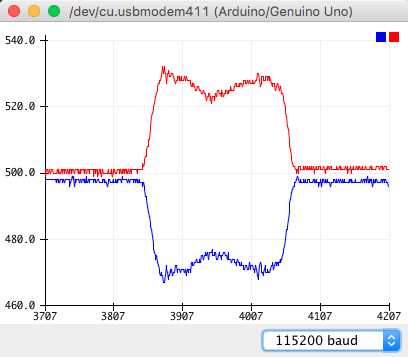
По информации PolySync, на Soul, у которого с Cee'd общая платформа, два аналоговых датчика крутящего момента. Cигнал каждого — отклонение уровня постоянного напряжения от базовых 2.5V, провода в жгуте — зеленый и синий. Проверим, что у нас то же самое:
- Размыкаем разъем на ЭБУ, пробрасываем нужные контакты через макетку и заводим на аналоговые входы arduino.
- Загружаем скетч, в цикле замеряющий напряжения и печатающий их в терминал.
- Запускаем Serial Plotter в Arduino IDE, поворачиваем рулевой вал. Видим результат на графике, схема совпадает с Soul:
- Радуемся сэкономленному времени.
Эмуляция сигнала датчиков
Переходим к эмуляции сигнала датчиков. Для этого поставим свой модуль в разрыв цепи между датиком и ЭБУ, будем транслировать настоящий сигнал с датчика и по команде сдвигать его на фиксированный уровень (изображая приложенное к рулевой колонке усилие). Силами одной arduino это не получится: там нет полноценного цифро-аналогового преобразователя, который мог бы выдавать постоянное напряжение. Аналоговые входы arduino нам тоже не очень подходят — хотя пинов для них целых 6, канал АЦП в контроллере только один, и его переключение между пинами занимает заметное время.
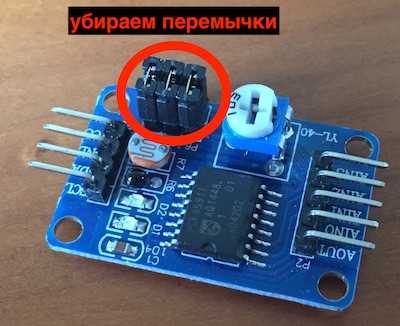
Нужно добавить к arduino внешние ЦАП/АЦП. Мне попались модули YL-40 (описание в pdf) на основе чипа PCF8591 — на каждой по 4 канала 8-бит АЦП и 1 8-бит ЦАП. Модуль может общаться с arduino по протоколу I2C. Потребуется небольшое допиливание (в буквальном смысле): китайские товарищи поставили на плату светодиод индикации напряжения на выходе ЦАП — его обязательно надо отсоединить. Иначе утекающий через диод ток не даст ЦАП поднять напряжение на выходе больше 4.2V (вместо штатных 5V). Диод отсоединяем, отковыривая резистор R4 с обратной стороны платы.

Также на входы распаяны игрушечные нагрузки (терморезистор, фоторезистор, ещё что-то), отсоединяем их, убирая перемычки, чтобы не мешались.
С интерфейсом к arduino есть нюанс — нам нужно 2 канала ЦАП, соотвественно 2 модуля, но у них одинаковые адреса I2C (зашиты в чип). Хотя чип позволяет менять свой I2C адрес, замыкая определенные ноги на +5V вместо земли, на плате эти перемычки не разведены. Вместо перепайки возьмем костыль — две разные библиотеки I2C на arduino (стандартная Wire и SoftI2CMaster), каждая на свою пару пинов. Получаем модули на разных шинах, конфликт пропадает.
Остальное прямолинейно — ставим модули в разрыв цепи от датчиков, соединяем с arduino, загружаем скетч. Подробности по распиновке подключения есть в комментариях в скетче. Остается включить всё в сборе, здесь важна последовательность:
- Включаем arduino, открываем Serial Monitor. Важно запустить arduino первой, не останавливать и не прерывать. Иначе напряжение на выходах ЦАПов сбросится, ЭБУ усилителя определит ошибку сигнала с датчиков, уйдет в безопасный редим и придется все перезапускать по новой.
- Запитываем усилитель, подключаем зажигание.
- Запускаем воспроизведение лога CAN-шины.
- Теперь по командам l и r через Serial Monitor усилитель будет поворачивать рулевой вал. Объявляется победа.
На сегодня всё, на очереди доработка софта (интеграция с CAN шиной, чтение оттуда текущего угла поворота и динамическое управление крутящим усилием, чтобы внешний контроллер мог задать фиксированный угол поворота руля и система его выдерживала), отработка на автомобиле (на стенде не смоделируешь сопротивление от колёс). Возможно замена 8-битных ЦАП/АЦП на 10 или 12 бит (взял первое, что под руку попалось). Рулящая нейросеть тоже в процессе, надеюсь скоро сделать пост.
Спасибо Artemka86 за ценные консультации по работе с CAN и помощь с оборудованием.
Ресурсы для дальнейшего погружения
- Car Hacking: The definitive source. Начинать можно с Car Hacking for Poories, там отлично покрыты основы. Остальное тоже интересно, но с упором на несанкционированный доступ.
- The Car Hacker's Handbook: A Guide for the Penetration Tester. Больше деталей, чем в Car Hacking: The definitive source, тоже акцент на несанкционированный доступ. Если читать как первое введение в тему, надо приспособиться пропускать большие куски.
- Car Hacking 101: Tools of the Trade, MCD Software — обзоры инструментов. В основном малоинтересная экзотика на мой взгляд.
- Open Source Car Control — открытая платформа для KIA Soul, в процессе разработки. Они делают полное решение (руль, акселератор, тормоза), включвя доработки по "железу" на машине (в основном для тормозов — ставятся дополнительные тормозные приводы, что-то меняется в тормозной гидравлике итд). Релиза ещё не было, но многие вещи уже можно подсмотреть.
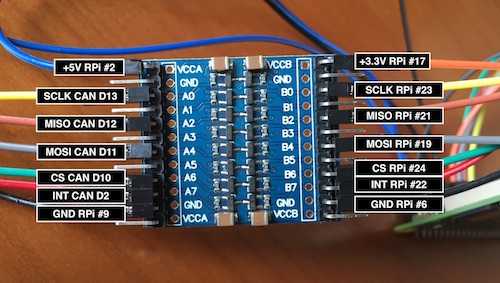
Прежде всего, внимание, CAN шилд и raspberry pi нельзя соединять напрямую, они не совместимы по напряжению. На Arduino UNO-совместимых платах напряжение логики 5V, а на raspberry pi только 3.3V, поэтому прямое соединение только сожжет задействованные пины.
Нам понадобятся:
- Raspberry Pi (проверялось на версии 3B).
- Arduino CAN шилд на MCP2515/MCP2551.
- Преобразователь уровня логики на 5 каналов или больше (можно 2 по 4 канала, но понадобится больше соединений). Мне попался этот
Нужно завести на CAN шилд питание (5V), соединения интерфейса данных SPI (4 пина: MOSI, MISO, SCLK, CS) и 1 пин сигнала прерывания. Всё, кроме питания, идет через преобразователь уровня, который в свою очередь тоже надо запитать.
На схемах ищем нужные пины.
Raspberry Pi:
CAN шилд:
Получаем результат:
- SPI на raspberry pi 19, 21, 23, 24 (MOSI, MISO, SCLK, CS) соответствуют D11, D12, D13, D9 (или на некоторых версиях D10) на CAN шилде.
- Прерывание с D2 на шилде можно завести на любой GPIO пин raspberry, у меня это пин 22 (GPIO 25). Номер пина укажем в софте при настройке.
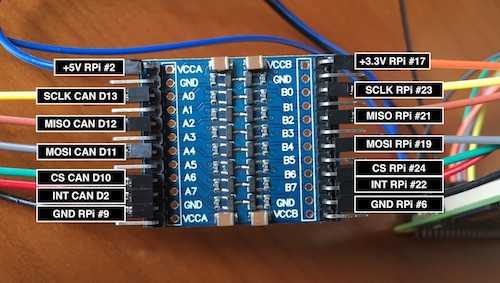
Соединяем через преобразователь, заводим нужные напряжения питания на каждую сторону преобразователя, получается такая лапша:
Всё, кроме 5V питания и земли на шилд идёт через преобразователь:
Переходим к настройке софта (стандартный Raspbian).
Включаем поддержку SPI и CAN модуля. В /boot/config.txt добавляем
dtparam=spi=on dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25,spimaxfrequency=1000000 dtoverlay=spi0-hw-csЗдесь interrupt=25 указывает пин, на который заведено прерывание с шилда. Индексация идёт по GPIO пинам, поэтому interrupt=25 это GPIO 25, он же пин 22 по сквозной индексации всех пинов. Также важно указать частоту интерфейса SPI spimaxfrequency, т.к. значение по умолчанию — 10 МГц — слишком высокое для шилда, он просто не соединится.
Перезагружаем raspberry pi, проверяем соединение с шилдом:
$ dmesg ... [ 12.985754] CAN device driver interface [ 13.014774] mcp251x spi0.0 can0: MCP2515 successfully initialized. ...Устанавливаем can-utils:
$ sudo apt install can-utilsЗапускаем виртуальный сетевой интерфейс:
$ sudo /sbin/ip link set can0 up type can bitrate 500000 $ sudo ifconfig can0 txqueuelen 1000Вторая команда важна при воспроизведении большого количества данных с raspberry pi, то есть когда записанный на автомобиле полный лог CAN шины воспоизводим для изолированного узла на стенде. Без увеличения буфера он скорее всего переполнится, когда в логе встретится несколько CAN пакетов с маленькими интервалами, и тогда соединение зависнет.
- Готово, можно пользоваться candump, cansniffer и всем остальным из can-utils.
habr.com
Автопилот своими силами. Часть 1 — набираем обучающие данные / Хабр
Привет, Хабр. Это пост-отчет-тьюториал про беспилотные автомобили — как (начать) делать свой без расходов на оборудование. Весь код доступен на github, и помимо прочего вы научитесь легко генерить такие класные картинки:
Поехали!
Вкратце
Краткое содержание для знакомых с темой: традиционно для набора обучающей выборки для автопилота на основе машинного обучения нужен был специально оборудованный автомобиль с достаточно информативной CAN шиной и интерфейсом к ней, что дорого. Мы поступим проще и бесплатно — будем набирать такие же по сути данные просто со смартфона на лобовом стекле. Подходит любой авто, никаких модификаций оборудования. В этой серии — вычисляем поворот руля в каждый момент времени по видео. Если в этом абзаце всё понятно, можно перепрыгивать через введение сразу к сути подхода.
Что-зачем-почему более подробно
Итак, ещё пару лет назад без серьёзных ресурсов большой корпорации в тему автопилотов было не сунуться — один только LIDAR сенсор стоил десятки тысяч долларов, но недавняя революция в нейросетях всё изменила. Стартапы из нескольких человек с простейшими наборами сенсоров из пары вебкамер на равных конкурируют по качеству результата со знаменитыми брендами. Почему бы не попробовать и нам, тем более столько качественных компонентов уже в открытом доступе.
Автопилот преобразует данные сенсоров в управляющие воздействия — поворот руля и требуемое ускорение/замедление. В системе с лазерными дальномерами, как у Google, это может выглядеть так:
Простейший же вариант сенсора — видеокамера, "смотрящая" через лобовое стекло. С ним и будем работать, ведь камера на телефоне уже есть у каждого.
Для вычисления управляющих сигналов из "сырого" видео хорошо работают сверточные нейросети, но, как и любой другой подход машинного обучения, предсказывать правильный результат их нужно научить. Для обучения нужно (а) выбрать архитектуру модели и (б) сформировать обучающую выборку, которая будет демонстрировать модели различные входные ситуации и "правильные ответы" (например, угол поворота руля и положение педали газа) на каждую из них. Данные для обучающей выборки обычно записывают с заездов, где машиной управляет человек. То есть водитель демонстрирует роботу, как надо управлять машиной.
Хороших архитектур нейросетей хватает в открытом доступе, а вот с данными ситуация более печальная: во-первых данных просто мало, во-вторых почти все выборки — из США, а у нас на дорогах много от тех мест отличий.
Дефицит открытых данных легко объясним. Во-первых данные — не менее ценный актив, чем экспертиза в алгоритмах и моделях, поэтому делиться никто не торопится:
The rocket engine is the models and the fuel is the data.Andrew NgВо-вторых, процесс сбора данных недёшев, особенно если действовать "в лоб". Хороший пример — Udacity. Они специально подобрали модель автомобиля, где рулевое управление и газ/тормоз завязаны на цифровую шину, сделали интерфейс к шине и считывают оттуда данные напрямую. Плюс подхода — высокое качество данных. Минус — серьезная стоимость, отсекающая подавляющее большинство непрофессионалов. Ведь далеко не каждый даже современный авто пишет в CAN всю нужную нам информацию, да и с интерфейсом придется повозиться.
Мы поступим проще. Записываем "сырые" данные (пока что это будет просто видео) смартфоном на лобовом стекле как видеорегистратором, затем софтом "выжимаем" оттуда нужную информацию — скорость движения и поворотов, на которых уже можно будет обучать автопилот. В результате получаем почти бесплатное решение — если есть держалка для телефона на лобовое стекло, достаточно нажать кнопку, чтобы набирать обучающие данные по дороге на работу.
В этой серии — "выжималка" угла поворота из видео. Все шаги легко повторить своими силами с помощью кода на github.
Задача
Решаем задачу:
- Есть видео с камеры, жестко закрепленной к авто (т.е. камера не болтается).
- Требуется для каждого кадра узнать текущий угол поворота руля.
Ожидаемый результат:
Сразу чуть упростим — вместо угла поворота руля будем вычислять угловую скорость в горизонтальной плоскости. Это примерно эквивалентная информация если знать поступательную скорость, которой мы займемся в следующей серии.
Решение
Решение можно собрать из общедоступных компонент, немного их доработав:
Восстанавливаем траекторию камеры
Первый шаг — восстановление траекториии камеры в трехмерном пространстве с помощью библиотеки SLAM по видео (simultaneous localization and mapping, одновременная локализация и построение карты). На выходе для каждого (почти, см. нюансы) кадра получаем 6 параметров положения: 3D смещение и 3 угла ориентации.
В коде за эту часть отвечает модуль optical_trajectories
Нюансы:
- При записи видео не гонитесь за максимальным разрешением — дальше определенного порога оно только повредит. У меня хорошо работают настройки в окрестностях 720х480.
- Камеру нужно будет откалибровать (инструкции, теория — актуальны части 1 и 2) на тех же настройках, с которыми записывалось видео с заезда.
- Системе SLAM нужна "хорошая" последовательность кадров, за которую можно "зацепиться" как за точку отсчета, поэтому часть видео в начале, пока система не "зацепится" останется не аннотированным. Если на вашем видео локализация не работает совсем, вероятны либо проблемы с калибровкой (попробуйте откалибровать несколько раз и посмотрите на разброс результатов), либо проблемы с качеством видео (слишком высокое разрешание, слишком сильное сжатие и т.д.).
- Возможны срывы отслеживания SLAM системой, если между соседними кадрами потеряется слишком много ключевых точек например, стекло на мгновение залило всплеском из лужи). В этом случае система сбросится в исходное не локализованное состояние и будет локализовываться заново. Поэтому из одного видео можно получить несколько траекторий (не пересекающихся во времени). Системы координат в этих траекториях будут совершенно разными.
- Конкретная библиотека ORB_SLAM2, которой я воспользовался, дает не очень надежные результаты по поступательным перемещениям, поэтому их пока игнорируем, а вот вращения определяет неплохо, их оставляем.
Определяем плоскость дороги
Траектория камеры в трехмерном пространстве — это хорошо, но напрямую еще не дает ответа на конечный вопрос — поворачивать налево или направо, и насколько быстро. Ведь у системы SLAM нет понятий "плоскость дороги", "верх-низ", и т.д. Эту информацию тоже надо добывать из "сырой" 3D траектории.
Здесь поможет простое наблюдение: автомобильные дороги обычно протягиваются гораздо дальше по горизонтали, чем по вертикали. Бывают конечно исключения, ими придется пренебречь. А раз так, можно принять ближайшую плоскость (т.е. плоскость, проекция на которую дает минимальную ошибку реконструкции) нашей траектории за горизонтальную плоскость дороги.
Горизонтальную плоскость выделяем прекрасным методом главных компонент по всем 3D точкам траектории — убираем направление с наименьшим собственным числом, и оставшиеся два дадут оптимальную плоскость.
За логику выделения плоскости также отвечает модуль optical_trajectories
Нюанс:
Из сути главных компонент понятно, что кроме горных дорог выделение главной плоскости будет плохо работать если машина всё время ехала по прямой, — ведь тогда только одно направление настоящей горизонтальной плоскости будет иметь большой диапазон значений, а диапазон по оставшемуся перпендикулярному горизонтальному направлению и по вертикали будут сопоставимы.
Чтобы не загрязнять данные большими погрешностями с таких траекторий, проверяем, что разброс по последнему главному компоненту значительно (в 100 раз) меньше, чем по предпоследнему. Не прошедшие траектории просто выкидываем.
Вычисляем угол поворота
Зная базисные векторы горизонтальной плоскости v1 и v2 (два главных компонента с наибольшими собственными значениями из предыдущей части), проецируем на горизонтальную плоскость оптическую ось камеры:
Таким образом из трехмерной ориентации камеры получаем курсовой угол автомобиля (с точностью до неизвестной константы, т.к. ось камеры и ось автомобиля в общем случае не совпадает). Поскольку нас интересует только интенсивность поворота (т.е. угловая скорость), эта константа и не нужна.
Угол поворота между соседними кадрами дает школьная тригонометрия (первый множитель — абсолютная величина поворота, второй — знак, определяющий направление налево/направо). Здесь под at понимаем вектор проекции ahorizontal в момент времени t:
Эта часть вычислений тоже делается модулем optical_trajectories. На выходе получаем JSON файл следующего формата:
{ "plane": [ [ 0.35, 0.20, 0.91], [ 0.94, -0.11, -0.33] ], "trajectory": [ ..., { "frame_id": 6710, "planar_direction": [ 0.91, -0.33 ], "pose": { "rotation": { "w": 0.99, "x": -0.001, "y": 0.001, "z": 0.002 }, "translation": [ -0.005, 0.009, 0.046 ] }, "time_usec": 223623466, "turn_angle": 0.0017 }, ..... }Значения компонент:
- plane — базисные векторы горизонтальной плоскости.
- trajectory — список элементов, по одному на каждый успешно отслеженный системой SLAM кадр.
- frame_id — номер кадра в исходном видео (начиная с 0).
- planar_direction — проекция отпической оси на горизонтальную плоскость
- pose — положение камеры в 3D пространстве
- time_use — время с начала видео в микросекундах
- turn_angle — горизонтальное вращение относительно предыдущего кадра в радианах.
Убираем шум
Мы почти у цели, но остается еще проблема. Посмотрим на получившийся (пока что) график угловой скорости:
Визуализируем на видео:
Видно, что в общем направление поворота определяется правильно, но очень много высокочастотного шума. Убираем его Гауссовским размытием, которое является низкочастотным фильтром.
Сглаживание в коде производится модулем smooth_heading_directions
Результат после фильтра:
Это уже можно "скормить" обучаемой модели и рассчитывать на адекватные результаты.
Визуализация
Для наглядности по данным из JSON файлов траекторий можно наложить виртуальный руль на исходное видео, как на демках выше, и проверить, правильно ли он крутится. Этим занимается модуль render_turning.
Также легко построить покадровый график. Например, в IPython ноутбуке с установленным matplotlib:
import matplotlib %matplotlib inline import matplotlib.pyplot as plt import json json_raw = json.load(open('path/to/trajectory.json')) rotations = [x['turn_angle'] for x in json_raw['trajectory']] plt.plot(rotations, label='Rotations') plt.show()На этом пока всё. В следующей серии — определяем поступательную скорость, чтобы обучить еще и управление скоростью, а пока что приветствуются pull-request'ы.
habr.com
Жизнь на автопилоте — может пора взять управление в свои руки?
Жизнь на автопилоте — может пора взять управление в свои руки?
Вы помните, как учились водить машину? Как первый месяц после получения прав были внимательны на дороге? Следили за дистанцией и машинами вокруг, всех пропускали, трепетно относились к пешеходам. Помните, как незаметно, все свелось к тому, что вы просто заводите машину и едите по своим делам, по ходу движения — слушая радио, разговаривая по телефону и обдумывая предстоящее? Вы практически не уделяете сознательного внимания происходящему на дороге, все происходит как на автопилоте. Очень удобно, верно?
Автопилот — полезная штука, но далеко не всегда
С началом ежедневных медитативных практик и развитием осознанности, приходит немало озарений. Одно из них — о жизни на автопилоте. И если в деле вождения, автопилот — очень полезная штука, то в таких сферах, как отношения, работа, принятие пищи и многих других, включение автопилота — не самый удачный вариант. Согласитесь, что уделение 100% внимания собеседнику, с которым вы общаетесь будет приятно не только ему. Вы также не только получите больше удовольствия от общения, но и наверняка узнаете больше полезной для вас информации. То самое и при приеме пищи — полностью отдаваясь пережевыванию пищи, а не наших тревог, переживаний и фантазий, мы получаем большее удовольствие от процесса еды.
Как отключить автопилот и взять под контроль собственную жизнь?
К сожалению, чаще всего большая часть нашего дня проходит именно на автопилоте. Делая одно, а думая о другом, мы теряем в качестве жизни. Принимая решения не осознанно, а на основании привычных схем поведения, сформировавшихся в подсознании, мы легко попадаем под внимание манипуляторов. Продолжаем работать на нелюбимой работе, тратим время и деньги на ненужные нам вещи, не замечаем благоприятные возможности, которыми полна наша жизнь. Как же отключить автопилот? Как взять контроль над своей жизнью в собственные руки? Как начать осознано принимать решения и перестать действовать запрограммированным образом? Ответ прост — медитируйте и развивайте осознанное отношение к жизни.
Медитация, как средство обретения контроля над жизнью
Начните медитировать с 10 минут ежедневно. Если понравится и войдете во вкус — увеличивайте продолжительность. Чтобы было проще — используйте приложения типа Calm (на английском), помогающие в освоении этого полезного навыка. Осознавайте дыхание во время практики, наблюдайте мысли и эмоции, пытающиеся захватить ваше внимание, фиксируйте их и возвращайтесь к осознаванию дыхания. Фиксация вашего внимания на дыхании — простая и мощная техника развития осознанности.
Со временем, вы сможете фиксировать сам момент возникновения мысли или эмоции, пытающейся привлечь ваше внимание и завладеть им. Наблюдая процесс зарождения отвлекающего фактора (мысли эмоции, телесного ощущения), вы получаете ключ к нахождению в текущем моменте. Вы просто фиксируете появление этого отвлекающего фактора и возвращаете внимание к процессу дыхания. Как это поможет вам в обретении контроля над жизнью?
Возьмем пример общения. Не отвлекаясь на посторонние мысли и уделяя 100% внимания происходящему разговору, вы можете достичь нескольких вещей. Расположив к себе собеседника таким редким качеством, как абсолютное внимание, вы с легкостью добьетесь требуемого вам от данного разговора результата. Или получите массу удовольствия, если это дружеская беседа. Или очень быстро поймете, что нет смысла тратить время на бесполезный разговор. Аналогично — с приемом пищи. Невероятное удовольствие от обычной казалось бы еды, насыщение гораздо меньшим количеством пищи, исключение вредной для здоровья продуктов. Примеры позитивных изменений можно привести в любой сфере нашей жизни. Осознанное отношение к происходящему — ключ к успеху и более наполненной жизни!
Начните практиковать осознанный подход к жизни!
Возьмите подлинный контроль над происходящим в вашей жизни в свои руки — отключите свой автопилот! Медитируйте, развивайте осознанность, будьте в текущем моменте, наслаждайтесь им и получайте максимум от всего, чем занимаетесь. Начните с малого — 10 минут осознанного дыхания ежедневно — простая практика, которая перевернет вашу жизнь. Попробуйте, вам непременно понравится! ))
Хорошего вам дня и отличного настроения!
Понравилась статья? Поделись с друзьями!
advance.tips
Автопилот своими рукам. Добавляем электронное управление steer-by-wire на обычный автомобиль
Всем привет. Любому автопилоту, очевидно, нужно не только принимать решения по управлению, но и заставлять автомобиль этим решениям подчиняться. Сегодня увидим, как весьма доступными средствами доработать обычный автомобиль полностью электронным рулевым управлением (steer-by-wire). Оказывается, сам авто для разработки не очень и нужен, а большинство функционала можно с комфортом отлаживать дома или в офисе. В главных ролях всем известные компоненты из хобби-магазинов электроники.
Задумаемся на секунду, что нужно для системы электронного управления? Сервопривод, который может поворачивать колёса, и контроллер, чтобы сервоприводом управлять. Внезапно, всё это в большинстве современных автомобилей уже есть, и называется "усилитель рулевого управления". Традиционные чисто механические (как правило, гидравлические) усилители стремительно исчезают с рынка, уступая место узлам с электронным блоком управления (ЭБУ). А значит, задача сразу упрощается: нам остается только "уговорить" имеющийся ЭБУ усилителя выдать нужные команды на сервопривод.
Очень удобным для доработки оказался KIA Cee'd начиная с 2015 модельного года (скорее всего аналогично и его соплатформенники от KIA/Hyundai). Сошлись одновременно несколько факторов:
- Усилитель руля полностью электрический, нет возни с гидравликой, стоит копейки (относительно) на разборках. Вся нужная проводка выведена наружу и легко доступна.
- Усилитель интегрирован с рулевой колонкой, поэтому к нему есть легкий доступ на автомобиле и любая дополнительная электроника останется в салоне в тепличных условиях (в отличие от усилителей, интегрированных в рулевую рейку).
- Очень важно — есть пример успешной доработки аналогичного KIA Soul. Американская PolySync разрабатывает апгрейд Soul до полностью drive-by-wire платформы для беспилотников, и на их гитхабе можно подсмотреть много полезного.
Итак, получена в распоряжение рулевая колонка в сборе:

Будем заставлять её крутиться. Для этого нужно создать у блока управления впечатление, что
- Он находится в автомобиле с работающим двигателем.
- Водитель прикладывает вращающее усилие к рулевому колесу.
Пойдем по порядку.
Нужно понять интерфейс между электронным блоком управления (ЭБУ) усилителя и остальным автомобилем. Нагуглив электрическую схему видим картинку:
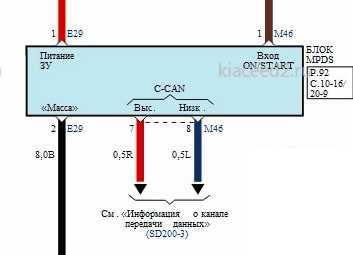
Из схемы видно, что физически интерфейс очень прост:
- Питание (12V постоянное) через разъем E29.
- Сигнал включенного зажигания (12V) через разъем M46.
- CAN-шина данных также через разъем M46.
Внешний вид и распиновки разъемов находим на том же сайте.
С питанием и зажиганием всё просто, берем 12V с обычного компьютерного блока питания. Но если просто подать питание и зажигание, усилитель полноценно не включится, и усиливать не будет. Дополнительно нужна информация от других блоков автомобиля: работает ли двигатель (чтобы не тратить энергию аккумулятора при выключенном), текущая скорость (чтобы делать руль "тяжелее" на скорости), наверняка что-то ещё.
Обмен данными между электронными блоками в современных автомобилях организован по шинам CAN (Controller Area Network). Это широковещательная (у пакетов нет адресов назначения) локальная сеть на витой паре, где каждый блок может публиковать свои данные. У каждого типа данных свой идентификатор. Например, в нашем случае усилитель руля рассылает значения угла поворота руля с ID 0x2B0. Часто бывает несколько физически разделенных шин, чтобы второстепенные блоки типа контроллеров стеклоподъемников не мешались обмену между критически важными компонентами. В Cee'd используется две шины: C-CAN и B-CAN (схема здесь, в части "Информация о канале передачи данных"). На C-CAN "висят" почти все блоки с ней и будем работать.
Выбор адаптера CAN-шины
Первым делом понадобится CAN интерфейс для компьютера. Детальный обзор возможных решений есть например здесь, цены варьируются от десятков до сотен долларов. По устройствам у нас относительно доступны:
- Адаптеры в сборе с алиэкспресса. Их не пробовал, по слухам довольно много брака и софт видимо только под Windows.
- Arduino шилды на MCP2515/MCP2551, в основном клоны дизайна от seeed в любом магазине ардуинной тематики. Но совмещать такой шилд надо не с Arduino (я так и не смог заставить связку работать на воспроизведение с нужной скоростью), а с Raspberry Pi. В приложении ниже подробная инструкция.
- USB адаптер CANHacker Baby, разработка Artemka86. Выгодно отличается от вариантов с алиэкспресса отличной поддержкой "из первых рук" от разработчика (проверено лично, Артём подходит к делу с душой). Также плюсом является поддержка стандартного протокола LAWICEL совместимого с широким набором софта.
Софта разного тоже много (за обзором опять сюда). Самый простой вариант — Linux c can-utils из SocketCAN, за который спасибо инженерам Volkswagen. Большой плюс SocketCAN в стандартизации — любое USB устройство с поддержкой протокола LAWICEL (pdf) видится системой как обычный сетевой интерфейс. Таким образом избегаем привязки к вендор-специфическому софту конкретного устройства. У текущей версии CANHacker есть небольшая несовместимость со стоковыми can-utils по работе с USB, поэтому берём патченную версию отсюда. Raspberry Pi с CAN шилдом работает со стоковым пакетом can-utils из Raspbian OS без проблем.
Подключение к шине, запись пакетов
С подключением к индивидуальному узлу на стенде всё просто: соединяем контакт CAN-High адаптера с CAN-High автомобильного узла, CAN-Low — c CAN-Low. По стандарту между CAN-High и CAN-Low должно быть 2 замыкающих резистора по 120 Ом, на практике обычно всё работает на довольно широком интервале сопротивлений, у меня например одно на 110 Ом.
На автомобиле замыкающий резистор не нужен (они там уже стоят, чтобы шина сама по себе работала). В зависимости от модели авто, возможно придется повозиться с физическим доступом к проводке шины. Самый удобный вариант — разъём OBD-II (on-board diagnostic), он обязателен на всех легковых автомобилях, выпущенных в Европе с начиная 2001-2004 года и находится не дальше 60 см от рулевого колеса. На Cee'd разъём слева под рулём, за пластмасовой крышкой блока предохранителей.

Распиновка OBD-II стандартизована и включает шину CAN (CANH на 6 контакте, CANL на 14). Нам повезло, корейцы пошли по пути наименьшего сопротивления и вывели C-CAN, на которой висят все важные узлы, прямо на диагностический разъём:
В результате на Cee'd можно прослушать весь внутренний трафик, ничего в авто не разбирая. Когда машина не твоя, а знакомые пустили повозиться — большой плюс. Но такая халява не везде. У Volkswagen например служебная CAN изолирована от OBD шлюзом, поэтому подключаться пришлось бы примерно так:

Подключив все контакты, поднимаем сетевой интерфейс:
$ sudo slcand -o -c -s6 -S 115200 ttyACM0 slcan0 && sleep 1 && sudo ifconfig slcan0 upПроверяем, что сеть работает и данные принимаются (включив зажигание):
$ cansniffer slcan0И наконец, если всё нормально, можно записывать лог:
$ candump -L slcan0 > real-car-can-log.txtЗдесь нужно запустить двигатель, т.к. усилитель руля включается на собственно усиление только при работающем двигателе, а нам на стенде надо, чтобы он усиливал.
Воспроизведение записи шины на стенде
С записанным логом с авто можно возвращаться на стенд и приступать к обману нашего одинокого усилителя. Первым делом вспомним, что в автомобиле стоит свой собственный усилитель, он тоже шлёт данные в CAN шину, и эти пакеты есть и в нашем логе. Отфильтруем их, чтобы избежать конфликтов. Подключаемся к усилителю на стенде, смотрим, что он выдает:
$ $ candump slcan0 slcan0 2B0 [5] 00 00 00 00 00 slcan0 2B0 [5] FF 7F FF 06 F1 slcan0 2B0 [5] FF 7F FF 06 C2 slcan0 2B0 [5] FF 7F FF 06 D3 slcan0 2B0 [5] FF 7F FF 06 A4 slcan0 2B0 [5] FF 7F FF 06 B5 slcan0 2B0 [5] FF 7F FF 06 86 slcan0 2B0 [5] FF 7F FF 06 97 slcan0 2B0 [5] FF 7F FF 06 68 slcan0 5E4 [3] 00 00 00 slcan0 2B0 [5] FF 7F FF 06 79 slcan0 2B0 [5] FF 7F FF 06 4A ....Видим, что рассылаются пакеты 2B0 (текущий угол поворота руля) и, реже, 5E4 (какой-то общий статус усилителя). Отфильтровываем их из общего лога:
$ cat real-car-can-log.txt | grep -v ' 2B0' | grep -v ' 5E4 ' > can-log-no-steering.txtФильтрованный лог можно подавать на воспроизведение:
% sudo ifconfig slcan0 txqueuelen 1000 $ canplayer -I can-log-no-steering.txtЕсли всё сработало успешно, усилитель заработает, крутить рукой рулевой вал станет гораздо легче. Итак, работать в штатном режиме мы узел заставили, можно переходить к симуляции усилий на руле.
Крутящий момент на рулевом валу и угол поворота измеряются встроенным блоком датчиков, от которого идет жгут проводов к блоку управления усилителем:

Блок управления обрабатывает сигналы датчиков и выдаёт команды сервоприводу на создание дополнительного усилия на поворот рулевого вала.
Проверка формата сигнала датчиков
По информации PolySync, на Soul, у которого с Cee'd общая платформа, два аналоговых датчика крутящего момента. Cигнал каждого — отклонение уровня постоянного напряжения от базовых 2.5V, провода в жгуте — зеленый и синий. Проверим, что у нас то же самое:
- Размыкаем разъем на ЭБУ, пробрасываем нужные контакты через макетку и заводим на аналоговые входы arduino.
- Загружаем скетч, в цикле замеряющий напряжения и печатающий их в терминал.
- Запускаем Serial Plotter в Arduino IDE, поворачиваем рулевой вал. Видим результат на графике, схема совпадает с Soul:
- Радуемся сэкономленному времени.
Эмуляция сигнала датчиков
Переходим к эмуляции сигнала датчиков. Для этого поставим свой модуль в разрыв цепи между датиком и ЭБУ, будем транслировать настоящий сигнал с датчика и по команде сдвигать его на фиксированный уровень (изображая приложенное к рулевой колонке усилие). Силами одной arduino это не получится: там нет полноценного цифро-аналогового преобразователя, который мог бы выдавать постоянное напряжение. Аналоговые входы arduino нам тоже не очень подходят — хотя пинов для них целых 6, канал АЦП в контроллере только один, и его переключение между пинами занимает заметное время.
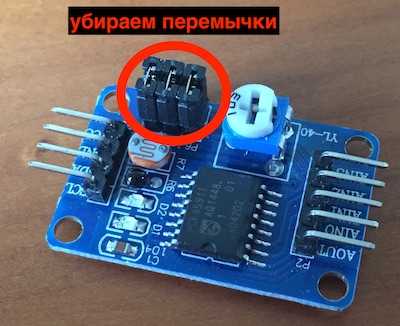
Нужно добавить к arduino внешние ЦАП/АЦП. Мне попались модули YL-40 (описание в pdf) на основе чипа PCF8591 — на каждой по 4 канала 8-бит АЦП и 1 8-бит ЦАП. Модуль может общаться с arduino по протоколу I2C. Потребуется небольшое допиливание (в буквальном смысле): китайские товарищи поставили на плату светодиод индикации напряжения на выходе ЦАП — его обязательно надо отсоединить. Иначе утекающий через диод ток не даст ЦАП поднять напряжение на выходе больше 4.2V (вместо штатных 5V). Диод отсоединяем, отковыривая резистор R4 с обратной стороны платы.

Также на входы распаяны игрушечные нагрузки (терморезистор, фоторезистор, ещё что-то), отсоединяем их, убирая перемычки, чтобы не мешались.
С интерфейсом к arduino есть нюанс — нам нужно 2 канала ЦАП, соотвественно 2 модуля, но у них одинаковые адреса I2C (зашиты в чип). Хотя чип позволяет менять свой I2C адрес, замыкая определенные ноги на +5V вместо земли, на плате эти перемычки не разведены. Вместо перепайки возьмем костыль — две разные библиотеки I2C на arduino (стандартная Wire и SoftI2CMaster), каждая на свою пару пинов. Получаем модули на разных шинах, конфликт пропадает.
Остальное прямолинейно — ставим модули в разрыв цепи от датчиков, соединяем с arduino, загружаем скетч. Подробности по распиновке подключения есть в комментариях в скетче. Остается включить всё в сборе, здесь важна последовательность:
- Включаем arduino, открываем Serial Monitor. Важно запустить arduino первой, не останавливать и не прерывать. Иначе напряжение на выходах ЦАПов сбросится, ЭБУ усилителя определит ошибку сигнала с датчиков, уйдет в безопасный редим и придется все перезапускать по новой.
- Запитываем усилитель, подключаем зажигание.
- Запускаем воспроизведение лога CAN-шины.
- Теперь по командам l и r через Serial Monitor усилитель будет поворачивать рулевой вал. Объявляется победа.
На сегодня всё, на очереди доработка софта (интеграция с CAN шиной, чтение оттуда текущего угла поворота и динамическое управление крутящим усилием, чтобы внешний контроллер мог задать фиксированный угол поворота руля и система его выдерживала), отработка на автомобиле (на стенде не смоделируешь сопротивление от колёс). Возможно замена 8-битных ЦАП/АЦП на 10 или 12 бит (взял первое, что под руку попалось). Рулящая нейросеть тоже в процессе, надеюсь скоро сделать пост.
Спасибо Artemka86 за ценные консультации по работе с CAN и помощь с оборудованием.
Ресурсы для дальнейшего погружения
- Car Hacking: The definitive source. Начинать можно с Car Hacking for Poories, там отлично покрыты основы. Остальное тоже интересно, но с упором на несанкционированный доступ.
- The Car Hacker's Handbook: A Guide for the Penetration Tester. Больше деталей, чем в Car Hacking: The definitive source, тоже акцент на несанкционированный доступ. Если читать как первое введение в тему, надо приспособиться пропускать большие куски.
- Car Hacking 101: Tools of the Trade, MCD Software — обзоры инструментов. В основном малоинтересная экзотика на мой взгляд.
- Open Source Car Control — открытая платформа для KIA Soul, в процессе разработки. Они делают полное решение (руль, акселератор, тормоза), включвя доработки по "железу" на машине (в основном для тормозов — ставятся дополнительные тормозные приводы, что-то меняется в тормозной гидравлике итд). Релиза ещё не было, но многие вещи уже можно подсмотреть.
Прежде всего, внимание, CAN шилд и raspberry pi нельзя соединять напрямую, они не совместимы по напряжению. На Arduino UNO-совместимых платах напряжение логики 5V, а на raspberry pi только 3.3V, поэтому прямое соединение только сожжет задействованные пины.
Нам понадобятся:
- Raspberry Pi (проверялось на версии 3B).
- Arduino CAN шилд на MCP2515/MCP2551.
- Преобразователь уровня логики на 5 каналов или больше (можно 2 по 4 канала, но понадобится больше соединений). Мне попался этот
Нужно завести на CAN шилд питание (5V), соединения интерфейса данных SPI (4 пина: MOSI, MISO, SCLK, CS) и 1 пин сигнала прерывания. Всё, кроме питания, идет через преобразователь уровня, который в свою очередь тоже надо запитать.
На схемах ищем нужные пины.
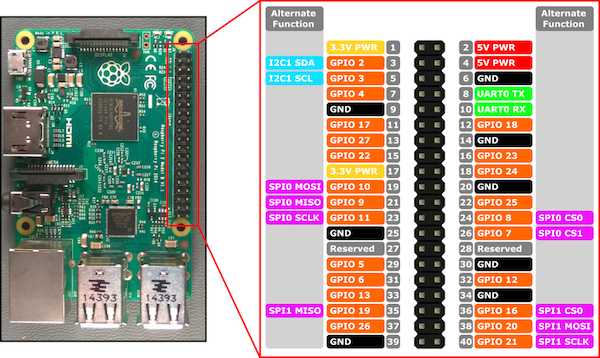
Raspberry Pi:
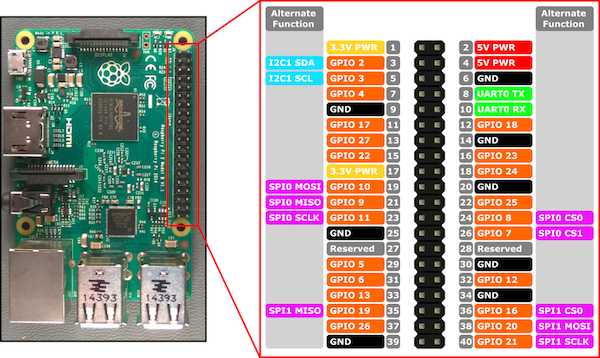
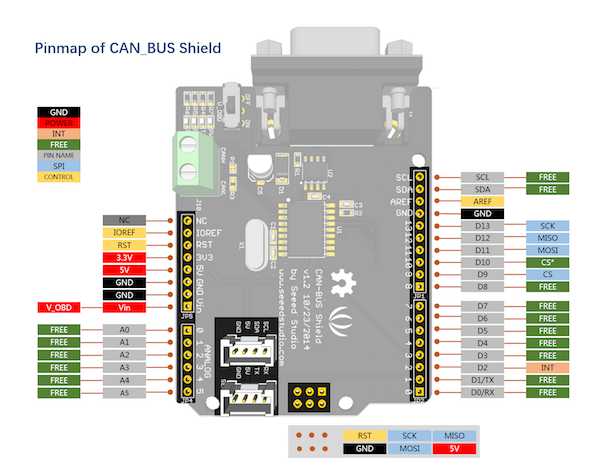
CAN шилд:
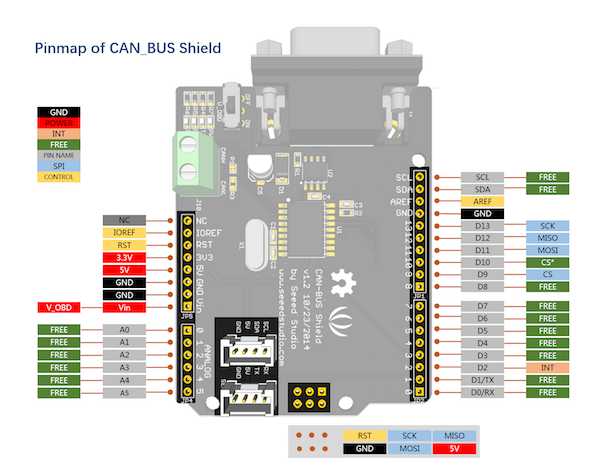
Получаем результат:
- SPI на raspberry pi 19, 21, 23, 24 (MOSI, MISO, SCLK, CS) соответствуют D11, D12, D13, D9 (или на некоторых версиях D10) на CAN шилде.
- Прерывание с D2 на шилде можно завести на любой GPIO пин raspberry, у меня это пин 22 (GPIO 25). Номер пина укажем в софте при настройке.
Соединяем через преобразователь, заводим нужные напряжения питания на каждую сторону преобразователя, получается такая лапша:
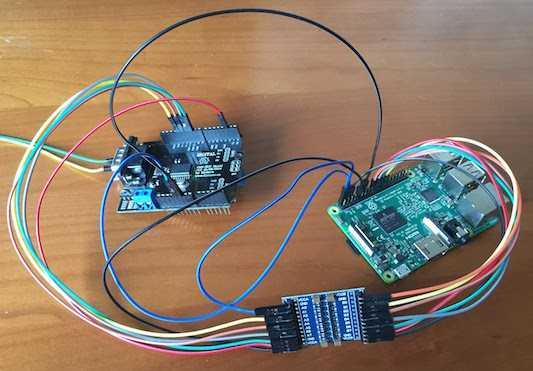
Всё, кроме 5V питания и земли на шилд идёт через преобразователь:
Переходим к настройке софта (стандартный Raspbian).
-
Включаем поддержку SPI и CAN модуля. В /boot/config.txt добавляем
dtparam=spi=on dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25,spimaxfrequency=1000000 dtoverlay=spi0-hw-csЗдесь interrupt=25 указывает пин, на который заведено прерывание с шилда. Индексация идёт по GPIO пинам, поэтому interrupt=25 это GPIO 25, он же пин 22 по сквозной индексации всех пинов. Также важно указать частоту интерфейса SPI spimaxfrequency, т.к. значение по умолчанию — 10 МГц — слишком высокое для шилда, он просто не соединится.
-
Перезагружаем raspberry pi, проверяем соединение с шилдом:
$ dmesg ... [ 12.985754] CAN device driver interface [ 13.014774] mcp251x spi0.0 can0: MCP2515 successfully initialized. ... -
Устанавливаем can-utils:
$ sudo apt install can-utils -
Запускаем виртуальный сетевой интерфейс:
$ sudo /sbin/ip link set can0 up type can bitrate 500000 $ sudo ifconfig can0 txqueuelen 1000Вторая команда важна при воспроизведении большого количества данных с raspberry pi, то есть когда записанный на автомобиле полный лог CAN шины воспоизводим для изолированного узла на стенде. Без увеличения буфера он скорее всего переполнится, когда в логе встретится несколько CAN пакетов с маленькими интервалами, и тогда соединение зависнет.
- Готово, можно пользоваться candump, cansniffer и всем остальным из can-utils.
Автор: waiwnf
Источник
www.pvsm.ru
Убираем руки от автопилота Tesla - Транспортные средства и ховерборды
В мире автономного вождения ни один производитель не продвинул его дорожно-правовую технологию дальше, чем компания Tesla. При оптимальных условиях автопилот будет ускоряться, тормозить и рулить для водителя, при условии, что ваши руки на руле или хотя бы возле руля. Это нужно не столько автопилоту или водителю, сколько законодательству, которое пока еще в полной мере не легализовало автономное управление без водителя за рулем.
Последняя система автопилота носит название S P90D. Система использует целый комплекс датчиков и камер, чтобы направлять машину. Впереди есть блок радара и камера для чтения линий на дороге. Они работают с 12 дальнобойными ультразвуковыми датчиками, которые проектируют дорожную обстановку на расстоянии 16 футов (4,8 м) в каждом направлении вокруг автомобиля, для того чтобы построить четкую картину того, что происходит рядом с вами и позади вас на любой скорости.
Автопилот любит обозначать личное пространство автомобиля и не любит, когда кто-то в него врывается, предлагая таким автомобилям соблюдать дистанцию или боковой интервал. Но поскольку далеко не все автомобили на дорогах пока умные, предпочитает сам отдаляться в спокойную зону комфорта, чем бережет нервы водителя.
Отличная работа автопилота со стороны выглядит даже скучно. Водитель начинает зевать даже на оживленных трассах. Фактор стресса пропадает, больше не нужно вертеть головой на 360 градусов, оценивая дорожную обстановку. Всем этим занимается техника, показывая данные на дисплее.
Хотя автопилот пока неуверенно ведет себя в условиях плотного трафика. Ему становится тесно, и он предлагает водителю положить руки на руль, потому что прижимающие его со всех сторон машины напрочь забивают все датчики и автомобиль перестает ориентироваться в пространстве.
Проверьте видео на дорожные испытания автопилота ниже:
Автор: Степан Мазур
Оригинал фото: gizmag
json.tv
Беспилотник своими руками. Часть 1
Перед тем, как начать делать беспилотник, стоял выбор, какую летательную модель брать за основу: квадракоптер или самолет? Так как с коптерами я в свое время наигрался, знаю их основной минус: чаще всего время полета составляет 10-20 минут. Лично для меня это очень мало, поэтому было решено взять за основу самолет.
В качестве самолета я выбрал Bixler 2, в нем очень много плюсов, а именно:
- Цена
- Неубиваемость
- Размах крыльев (1.5m)

Теперь осталось дело за автопилотом. В качестве «мозгов» взят Raspberry PI B+ с платой NAVIO, на которой располагаются нужные нам датчики:
- GPS\GNSS
- акселерометр, гироскоп, магнитометр
- датчик давления для расчета высоты
- 4-х канальный АЦП
- 16-канальный ШИМ-генератор
- FRAM, энергонезависимая память
- RGB LED
- PPM вход
Возможно многие слышали, а кто-то успел и опробовать ArduPlane. Это open source проект автопилота для коптера/самолета/ровера. К счастью, команда EMLID, которая занималась разработкой платы NAVIO, сделала порт ArduPlane на Raspberry PI. Так что все, что надо, это склонировать репозиторий и скомпилировать все это дело на малинке, после чего закрепить наш автопилот на самолете — и в путь.
Монтируем наш автопилот к самолету:

Тут я и столкнулся с проблемами: места очень мало, пришлось отказаться от стандартной кабины пилота, которая шла вместе с самолетом, и сделать из пустой баклажки от кока-колы новую кабину пилота, покрасив ее в серебристый цвет. Оказалось, что смотрится намного лучше, чем стандартная.
Скажу честно, все получилось не с первого раза. Так как запускать самолет я мог только по выходным и не всегда улыбалась погода, то с момента, когда у меня был готов самолет и до первого успешного запуска, прошло полтора месяца.
Я полетал в режиме стабилизации: если не двигать рычаги на пульте управления, то самолет сам себя выравнивает и летит по прямой. Следующим этапом будет полет по GPS точкам с заранее проложенным маршрутом.
Теперь, возможно, кому-то будет интересна цена вопроса. Итак:
- Bixler 2 — 90$( без пульта, он у меня был)
- Аккумулятор 2600mAh — 50$
- Raspberry Pi B+ (sd card)- 45$
- NAVIO — 149$
В сумме у меня получилось $334 за весь комплект, готовый к полету. Кто-то скажет, что это дорого и, возможно, будет прав. Однако я считаю, что это даром, при том что у меня есть летающий линукс, к которому я могу подключить 3G модем и изменять курс полета везде, где есть покрытие интернета.
Автор: Спивак Константин
robo-hunter.com
Новый автопилот Tesla советует «держать руки на руле» — Naked Science

©teslamotors.com
Отметим также, что на очереди у разработчиков такая функция как вызов собственного автомобиля. По нажатию кнопки электрокар находит своего хозяина. Повторное нажатие кнопки, по словам Илона Маска, ставит авто в гараж. По всей видимости, эта функция будет доступна с мобильного или носимого устройства пользователя.Кроме того, в планах Tesla создать через три года полностью автономную машину. По информации СМИ, для этого внутри компании будет создано специальное подразделение под названием Tesla Mobility. По предварительным данным, отдел по разработке автономных автомобилей начнет свою работу через 12-18 месяцев.
Tesla Motors – американская автомобильная компания из Кремниевой долины, ориентированная на производство электромобилей. Названа в честь всемирно известного электротехника и физика Николы Теслы. Основана компания в 2003 году. С 2008-го поставляет на рынок спортивную машину Tesla Roadster. В 2012 году представила седан Model S. Штат производителя электрокаров насчитывает более 2 тыс. человек.naked-science.ru
- Глаза искусственные

- Антарктида рыба фото

- Вертолет новый

- Гугл лента новостей

- Фото корабль ракета

- Сообщение о страшной космической радиации

- Города будущего в россии

- Земля круглая когда стало известно что

- Какой вкус у человеческой плоти

- Спутник над планетой

- Чем в пишут космосе





