Содержание
история, будущее и реальность / Хабр
Потеря любой конечности или любого органа для человека — это большая проблема. В некоторых случаях с ней приходится мириться, но иногда современные средства протезирования способны сделать из человека «с ограниченными возможностями» человека с «дополненными возможностями», как выражаются представители некоторых компаний этой отрасли.
В этой статье мы поговорим о протезировании рук. Здесь мы не затронем тему зубов, глаз, ушей, лица, внутренних органов человека и даже ног. И начнём со Средневековья, когда одним из самых эффективных способов борьбы с инфекциями была ампутация. Тему продолжат устройства викторианской эпохи и современные бионические протезы, а в конце мы обсудим будущее этого направления.
Стальные руки рыцарей
Этот протез руки, выполненный из стали, датируется XVI веком. В нём есть сдвоенные пальцы и большой палец, которые могут принимать определённые позиции. Управление происходило с помощью кнопки на тыльной части ладони. Это устройство — один из трёх протезов шевалье Götz von Berlichingen. Приспособление позволяло брать в руки предметы и, возможно, даже писать пером.
Управление происходило с помощью кнопки на тыльной части ладони. Это устройство — один из трёх протезов шевалье Götz von Berlichingen. Приспособление позволяло брать в руки предметы и, возможно, даже писать пером.
Это ещё одна рука рыцаря.
Внутри этой железной руки, изготовленной в XVII веке, был механизм, который позволял сгибанием оставшейся руки управлять сжатием кулака. Это был, видимо, прообраз современных тяговых протезов.
Этот деревянный протез предположительно был сделан в 1800 году.
Ещё один деревянный протез предположительно управлялся с помощью тросика. Искусственная рука представлена в Смитсоновском музее.
Источник: invention.smithsonian.org
Менее богатые люди могли использовать крюки-протезы, подобные этому приспособлению начала XIX века. Когда я взялся за эту статью, я был уверен, что только такие протезы и были до XX века.
Локоть, запястье и пальцы этого протеза, сделанного между 1850 и 1910 годами, могут двигаться. Вероятно, на эту железную руку надевали перчатку. Хотя устройство выглядит очень интересно.
Вероятно, на эту железную руку надевали перчатку. Хотя устройство выглядит очень интересно.
В 2013 году на Хабрахабре заминусовали пост о чудо-протезе из Голландии. Пост содержал скан из Журнала Министерства народного просвещения № 7 от 1837 года, где описывалась «механическая рука нового устройства, которая может совершенно заменить потерю этих драгоценных членов». Две такие руки, которыми можно махать, шевелить пальцами и брать предметы, дали двум военнослужащим. Судя по предыдущим примерам протезов, которые хранятся в различных музеях и описаны историками и учёными, данная статья всё-таки могла не быть уткой, как думали пользователи.
На фотографии ниже — ветеран Гражданской войны в США 1861-1865 годов.
В ладони этой женской искусственной руки XIX века видны отверстия, которые, возможно, использовали для закрепления крюка или других приспособлений, упрощающих жизнь.
Источник: collectmedicalantiques.com
XX век
Протез на фотографии ниже был сделан для 16-летней девочки, потерявшей руку ниже локтя. Протез сделан из дерева, кожи и ткани. Нужно отметить, что здесь думали и о внешнем виде приспособления, и о его функциональности: запястье вращается, пальцы меняют положение, а в ладонь добавлен крюк — чтобы можно было, например, носить сумку. Протез представлен в Музее науки в Лондоне.
Протез сделан из дерева, кожи и ткани. Нужно отметить, что здесь думали и о внешнем виде приспособления, и о его функциональности: запястье вращается, пальцы меняют положение, а в ладонь добавлен крюк — чтобы можно было, например, носить сумку. Протез представлен в Музее науки в Лондоне.
Так выглядели протезы XIX и XX века. Представлены в Музее науки.
На этой фотографии немецкий солдат работает в мастерской, используя протез левой руки. Фотография содержится в Национальном музее Первой Мировой Войны в Канзасе.
Это швейцарский протез. В лучших традициях — с разными сменными насадками.
Этот протез представлен в Музее науки в Лондоне. Он сделан для 17-летнего парня в 1959 году.
Источник: sciencemuseum.org.uk
Одними из первых получателей протезов были военнослужащие. В этом случае производитель протезов из Бруклина на рекламном плакате сообщил, что горд работой с вооружёнными силами США.
Как можно заметить, протезы этого типа за несколько десятков лет не особенно изменились.
Современные бионические протезы
Давайте разберёмся сперва, что такое «бионические протезы». Бионика — это прикладная наука, объединяющая в себе биологию и технику. Живая природа помогает учёным находить решения для технических устройств. Различают биологическую бионику, которая изучает процессы в биологических системах, теоретическую, которая строит математические модели этих процессов и техническую. Нам сейчас важна техническая бионика: она применяет модели теоретической бионики для решения инженерных задач, как и в случае с протезами.
Ранее специалисты подразумевали под «бионическими» протезами такие устройства, которые похожи на часть тела, которую они замещают. С точки зрения современных понятий эти протезы — те, которые управляются электроникой и биотоками, то есть используют миографию или энцефалограмму.
Британская компания RSLSteeper, имеющая на данный момент около 90 лет опыта в протезировании, вывела бионический протез кисти руки BeBionic на международный рынок в 2010 году.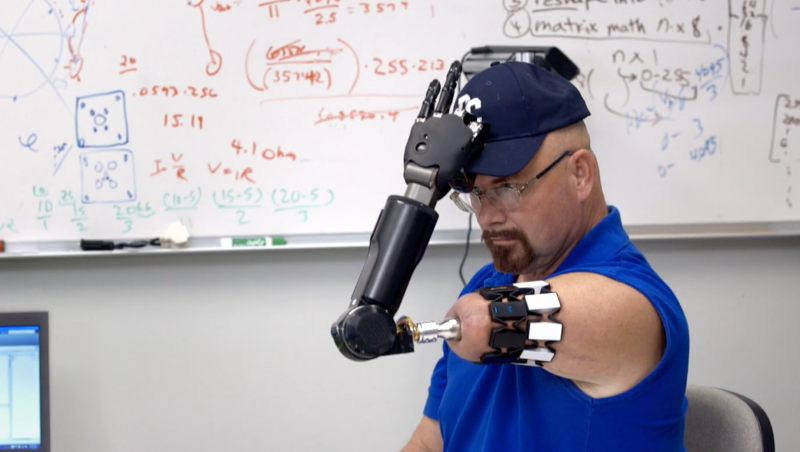 На тот момент искусственная рука для взрослого имела только четыре функциональных захвата, но уже позволяла есть, пить, печатать, поворачивать ключ в замке, использовать банкомат и держать маленькие предметы. Пользователь с помощью устройства может разбивать яйца и держать в руке одноразовый стаканчик — потому что даже сила нажатия регулируется командами, снимаемыми датчиками с мышц.
На тот момент искусственная рука для взрослого имела только четыре функциональных захвата, но уже позволяла есть, пить, печатать, поворачивать ключ в замке, использовать банкомат и держать маленькие предметы. Пользователь с помощью устройства может разбивать яйца и держать в руке одноразовый стаканчик — потому что даже сила нажатия регулируется командами, снимаемыми датчиками с мышц.
Отсутствие массового спроса и низкая конкуренция — основная причина, по которой бионические протезы очень дорого стоят. В 2013 году протез ладони стоил до ста тысяч долларов.
Как удешевить протез? Нужно сделать дешевле его производство. В 2013 году успешно завершилась краудфандинговая кампания на IndieGoGo по созданию открытого и доступного протеза ладони, большую часть деталей для которого можно распечатать на 3D-принтере. Устройство имеет независимые приводы для каждого пальца, тактильную обратную связь и считывает сигналы через кожу для управления. В ладони устройства находятся электроприводы и управляющая плата на Arduino.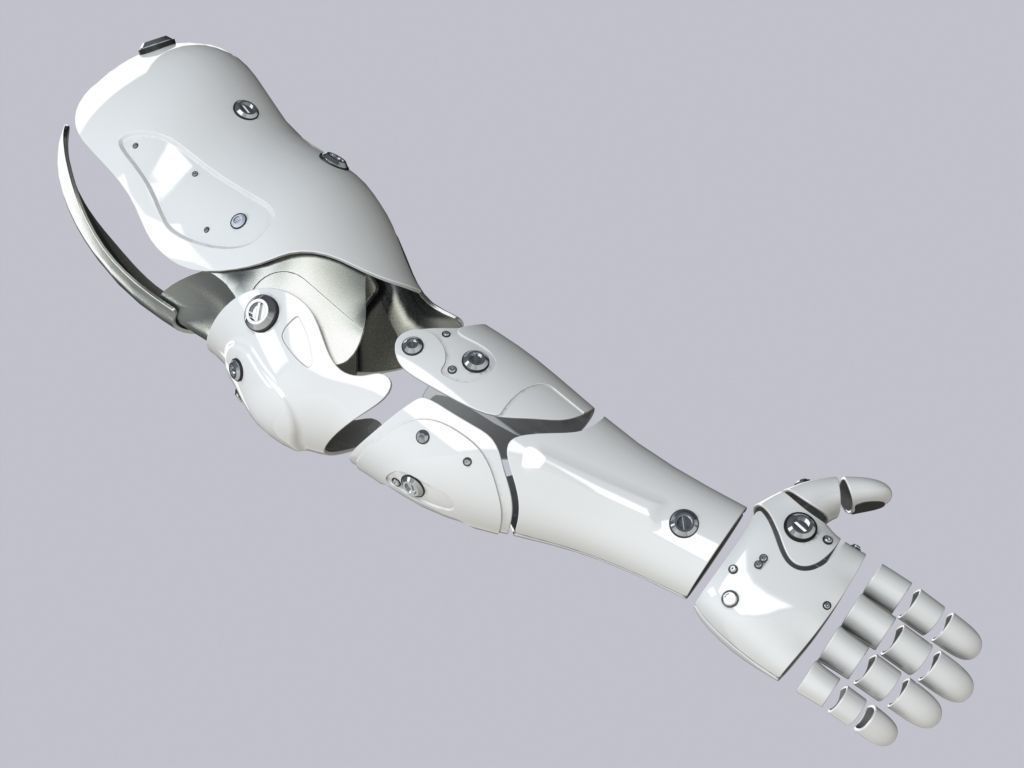
<img src=«habrastorage.org/getpro/habr/post_images/79b/967/591/79b9675914c40ef0e466ee254de5e0e9.jpg» alt=«image»/>
Макет детской версии Dextrus, стилизованной под руку Железного Человека.
Ещё один проект, Limbitless Solutions, который делает недорогие протезы, в 2015 году устроил встречу Роберта Дауни младшего и семилетнего мальчика Алекса, чтобы подарить ребёнку бионический протез в форме руки костюма его любимого героя.
И что очень важно — благодаря печати на 3D-принтере себестоимость этого протеза составила всего 350 долларов. Сам проект делает эти протезы в основном для детей, семьи которых не могут себе позволить потратить 30-100 тысяч долларов на бионическую руку.
<img src=«habrastorage.org/getpro/geektimes/post_images/97b/0c3/cb9/97b0c3cb9d60525af7e546ed9c73124c.png» alt=«image»/>
В 2014 году в госпитале Университета Джона Хопкинса разработали протез обеих рук и испытали его на человеке, который потерял обе руки от плеча и ниже.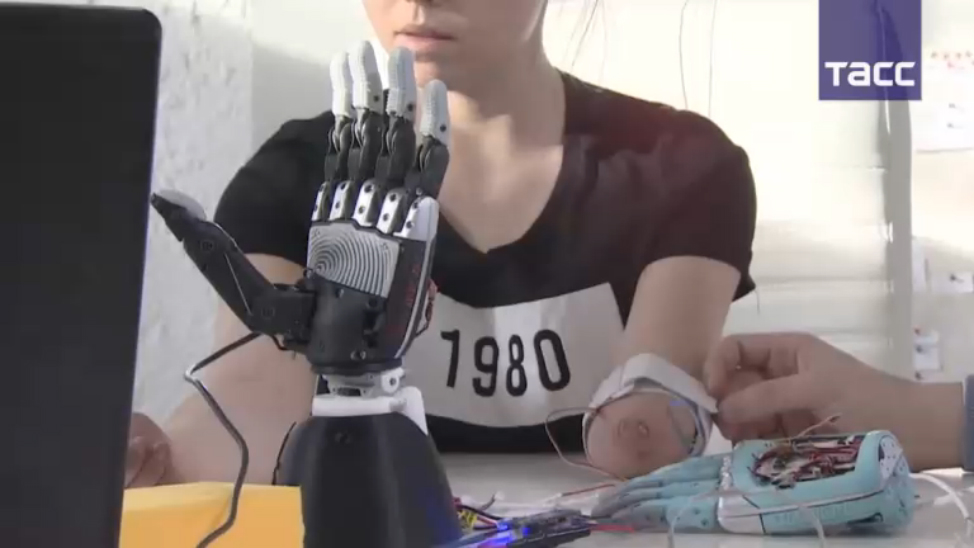 Для управления протезом система считывала сигналы с грудных мышц.
Для управления протезом система считывала сигналы с грудных мышц.
Один из самых серьёзных игроков рынка протезирования рук в мире — компания Bebionic. Часто в СМИ говорят о том, что именно эта компания сделала первый бионический протез. В этом видео — демонстрация возможностей миоэлектрического протеза BeBionic 3 от Найджела Экленда, известного в России и мире киборга.
В июне 2016 года первая британка получила кисть Bebionic Small — реалистичный протез, который благодаря небольшому размеру подходит женщинам и подросткам. 29-летняя Ники Эшвелл (Nicky Ashwell) из Лондона родилась без правой руки и всю жизнь использовала косметический протез, который не имел никакого функционала. Судя по фотографиям, Ники решила не надевать перчатку, имитирующую человеческую кожу.
Протез Bebionic Small весит 390 граммов, способен держать до 45 килограммов и имеет 14 захватов.
<img src=«habrastorage.org/getpro/geektimes/post_images/670/4d5/245/6704d5245a167bd1cb931f503589bc21. jpg» alt=«image»/>
jpg» alt=«image»/>
В мае 2016 года 26-летний Джеймс Янг получил протез, сделанный похожим на руку Солида Снейка — героя серии игр Metal Gear Solid. Джеймс потерял левую руку, повредил левую ногу и получил другие повреждения, когда попал под поезд, и после больницы получил стандартные протезы, которые сам описал как «уродливые». Сейчас он «обкатывает» очередной прототип искусственной руки.
Фото: dailymail.co.uk
Metal Gear Solid 5
Как видно из примеров выше, современные бионические протезы имеют достаточный для различных бытовых действий функционал. Но есть ещё кое-что, над чем работают учёные: над чувствительностью протезов. Для руки человека важно понимать, как сильно что-то сжать, что именно можно брать в руку, что нельзя. Так и с искусственной кистью — её сильно улучшит возможность чувствовать.
В 2013 году команда из Cleveland Veterans Affairs Medical Center и Case Western Reserve University разработала протез, сенсоры которого напрямую подключены к нервным окончаниям оставшейся части конечности.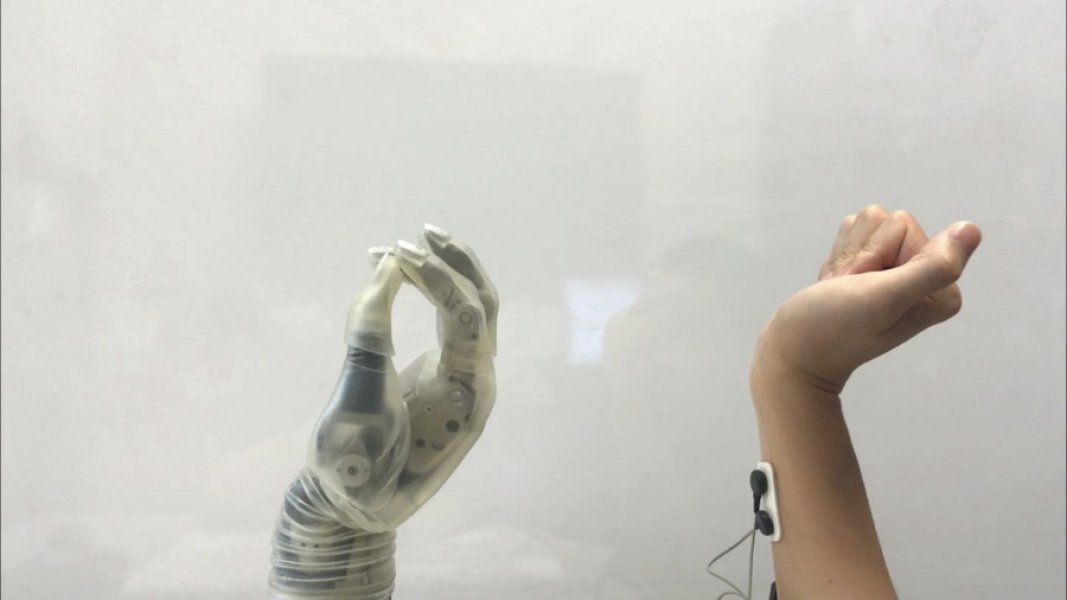 В этом случае импульсы с датчиков не отличаются от импульсов, которые передаёт собственная рука. Первый доброволец, который испытал на себе устройство, рассказал, что стал чувствовать «пальцами», ладонью и тыльной частью ладони. На видео ниже доброволец пытается оторвать веточку от вишни — сначала с выключенной функцией чувствительности искусственной руки, затем — с включенной. Во втором случае он лучше справляется с этой задачей.
В этом случае импульсы с датчиков не отличаются от импульсов, которые передаёт собственная рука. Первый доброволец, который испытал на себе устройство, рассказал, что стал чувствовать «пальцами», ладонью и тыльной частью ладони. На видео ниже доброволец пытается оторвать веточку от вишни — сначала с выключенной функцией чувствительности искусственной руки, затем — с включенной. Во втором случае он лучше справляется с этой задачей.
DARPA в середине 2013 года также представила протез с обратной связью в рамках программы RE-NET (Reliable Neural-Interface Technology). Агентство собиралось работать по данному проекту до 2016 года.
В 2015 году 28-летний парализованный пациент с помощью протеза, подключенного к мозгу, стал осязать различные предметы, включая прикосновения к каждому пальцу. Это было сделано в рамках другой программы — Revolutionizing Prosthetics.
В 2014 году Dennis Aabo Sørensen, потерявший руку из-за неосторожного обращения с пиротехническими «игрушками», вызывался добровольцем для испытаний протеза с обратной связью. Электроды протеза подключили к нервной системе человека. Сила сигнала просчитывается компьютером, и Деннис стал ощущать размер, форму и текстуру объекта.
Электроды протеза подключили к нервной системе человека. Сила сигнала просчитывается компьютером, и Деннис стал ощущать размер, форму и текстуру объекта.
Бионические протезы в России
На российском рынке фактически нет игроков, которые ввели в коммерческое использование бионические протезы рук. Разработку ведёт стартап «Моторика», известный внедрением в федеральную программу обеспечения инвалидов техническими средствами реабилитации тяговых протезов для детей — благодаря этой компании дети получают тяговые протезы за счёт государства. В этом видео — испытания четвёртого прототипа искусственной кисти Stradivary, которую команда планирует начать производить и устанавливать в России в октябре-ноябре 2016 года.
Протез Stradivary — миоэлектрический. Для его установки не требуется хирургическое вмешательство. Поверхностные миодатчики встраиваются в приёмную гильзу, касаются определённых мест на коже в районе мышц, улавливают потенциал при сокращении мышцы и передают сигнал на раскрытие или закрытие кисти.
Основная проблема, с которой встречаются при установке этого вида протезов, это слабо развитые мышцы предплечья. Чтобы избежать этой проблемы, «Моторика» и делает тяговые механические протезы детям — такие протезы не только помогают выполнять различные функции руки, но и служат тренажёром.
По мнению Ильи Чеха, основателя «Моторики», сейчас есть два направления развития бионических протезов.
Первое — это очувствление, то есть обратная связь, позволяющая владельцу протеза получать информацию о качествах объекта, к которому он прикасается устройством.
Второе — вживление всех элементов, включая каркас и датчик. Одна из проблем с протезом Джеймса Янг, получившего руку, похожую на руку из Metal Gear Solid, это необходимость снимать такой протез для сна или принятия душа. В будущем протезы будут скорее напоминать руку главного героя фильма «Я, робот», сыгранного Уиллом Смитом. Не в плане соответствия собственной конечности, а в плане отсутствия необходимости дополнительного ухода.
Сейчас в мире очень популярно недорогое печатное направление в протезировании. К этому привели доступность и распространение 3D-принтеров. Существуют различные проекты, помогающие бесплатно получить тяговые протезы, и схемы, с помощью которых можно доработать и распечатать миоэлектрический протез руки. Илья Чех считает это направление временным: оно будет популярно предстоящие 10-12 лет, пока будут развиваться и масштабироваться вживляемые технологии. 3D-печать сейчас предлагает более низкую стоимость, но существенно проигрывает в качестве. И лучшее качество по сравнению с традиционными технологиями оно скорее всего не даст никогда. Всегда будет дешевле и качественнее отрезать на лазере из листового металла, чем печатать полимерами с помощью принтера. По крайней мере так будет, если мыслить в существующей парадигме развития печати, и не фантазировать на предмет молекулярного построения объектов. Печать создана для максимального сокращения сроков и стоимости прототипирования и R&D.
Каким вы видите будущее протезирования руки человека? Какие способы установки и управления кажутся вам наиболее востребованными через 20-30 лет?
Высокотехнологичные протезы меняют Паралимпийские игры к лучшему
Сентябрь 2021 г.
Майя Хоок, специалист по коммуникации в области ИС и НИОКР компании Ottobock, Германия
Паралимпийские игры – 2020 в Токио прошли с 24 августа по 5 сентября 2021 г. Примерно 4400 спортсменов-инвалидов соревновались за золото в 22 дисциплинах. Спортивные протезы, охраняемые при помощи ИС, вошли в число основных приспособлений, которые использовались ими для достижения поставленных целей. Научные исследования и разработки помогли спортсменам в полной мере проявить свои атлетические способности.
Благодаря использованию спортивных протезов 25 июня Йоханнес Флорс (26 лет) улучшил свой собственный мировой рекорд в беге на 200 м и завоевал «золото» на Паралимпийских играх в Токио в августе 2021 г. (Фото предоставлено компанией Ottobock)
(Фото предоставлено компанией Ottobock)
Йоханнес Флорс бегает по своей тренировочной трассе в Леверкузене до шести часов каждый день. В августе он прилетел в Японию, чтобы соревноваться со спортсменами из всех уголков земного шара. «На самом деле я готовился к Паралимпийским играм с 2016 г.», – говорит 26-летний спортсмен. Немецкий легкоатлет завоевал золото на Паралимпийских играх в Токио. В настоящее время г-н Флорс является самым быстрым бегуном на протезах в мире. В конце июня он улучшил свой собственный мировой рекорд в беге на 200 м, а также стал самым быстрым в своем классе (T62) на дистанциях 100 и 400 м. Но эти достижения не дались ему легко. Г-н Флорс родился с генетическим дефектом малых берцовых костей. У него отсутствовали обе малые берцовые кости и деформировались ступни. О спринте не могло быть и речи. «Было слишком много боли», – говорит он. По этой причине он принял решение ампутировать обе голени десять лет назад. «Я все еще лежал в больнице, когда решил записаться на спортивную программу в школе», – вспоминает он. Сейчас его повседневные протезы позволяют ему нормально ходить, а заниматься бегом он может с помощью специальных углеродных пружин, предназначенных для занятий спортом. «Ощущение такой скорости – это огромное эмоциональное переживание», – говорит он.
Сейчас его повседневные протезы позволяют ему нормально ходить, а заниматься бегом он может с помощью специальных углеродных пружин, предназначенных для занятий спортом. «Ощущение такой скорости – это огромное эмоциональное переживание», – говорит он.
Не так давно спортсмены-паралимпийцы носили во время спортивных соревнований свои обычные протезы. Лишь в 80-х годах прошлого столетия они стали носить специально разработанные протезы для бега на короткие дистанции. В отличие от человеческих ног или спортивных протезов, обычные протезы не так легко изгибаются и затрудняют выполнение движений, необходимых для определенных видов спорта. «Неожиданно появились спортивные протезы – и все изменилось», – говорит г-н Флорс.
В настоящее время компания Ottobock владеет 1886 патентами относящимися более чем к 540 патентным семьям, включая патенты на многочисленные высокотехнологичные решения для участников Паралимпийских игр.
Спортивные протезы помогают людям участвовать в соревнованиях
Компания Ottobock – это производитель популярных спортивных протезов и инвалидных колясок, который уже более 30 лет поставляет устройства для спортсменов-паралимпийцев.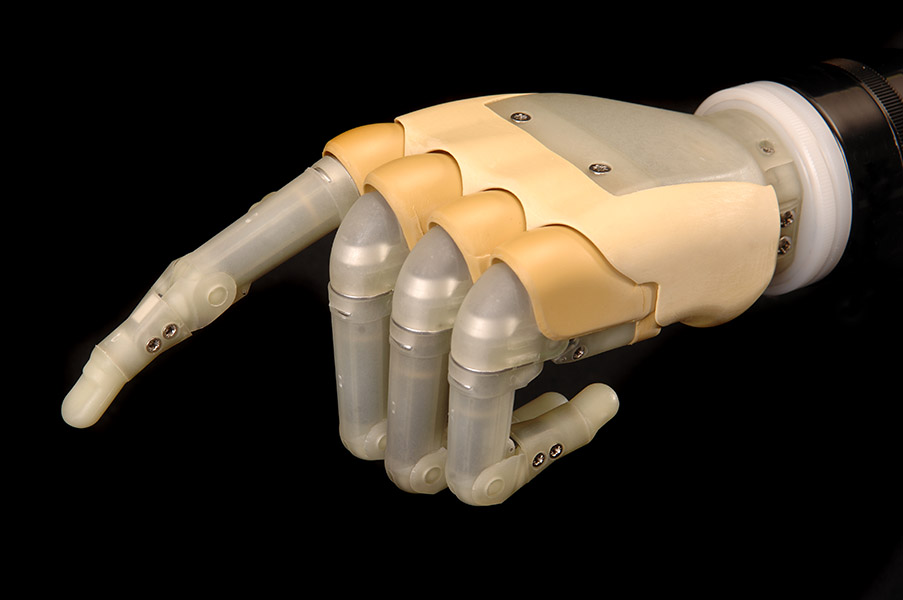 Эта немецкая компания, получившая известность благодаря носимым биомеханическим устройствам, занимается изготовлением протезов уже более 100 лет. Вначале компания производила деревянные протезы конечностей для тех, кто пострадал во время Первой мировой войны. Сегодня ее продукция включает протезы, работающие с использованием ИИ, включая, например, биомеханическую кисть руки «bebionic»; благодаря этим изделиям компания задает новые технологические стандарты в сфере производства протезов.
Эта немецкая компания, получившая известность благодаря носимым биомеханическим устройствам, занимается изготовлением протезов уже более 100 лет. Вначале компания производила деревянные протезы конечностей для тех, кто пострадал во время Первой мировой войны. Сегодня ее продукция включает протезы, работающие с использованием ИИ, включая, например, биомеханическую кисть руки «bebionic»; благодаря этим изделиям компания задает новые технологические стандарты в сфере производства протезов.
В настоящее время компания Ottobock является владельцем 1886 патентов, относящихся более чем к 540 патентным семьям, включая многочисленные высокотехнологичные изделия для паралимпийцев.
Так, например, подвижный протез стопы 1E95 используется для таких видов спорта, как баскетбол и волейбол. Этот протез имеет простую конструкцию и облегчает ходьбу, бег и резкую смену направления движения. Фирма Ottobock разработала и запатентовала протез стопы Runner 1E91 специально для спринтеров и прыгунов в длину.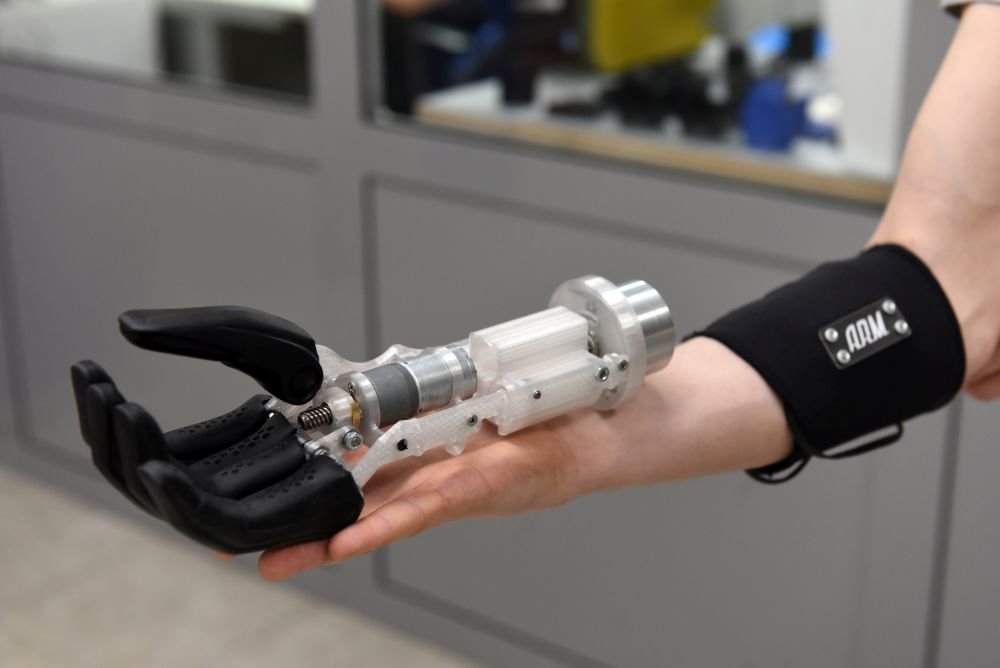 Этот протез стопы, который можно легко адаптировать к потребностям разных людей, носят многие легендарные участники Паралимпийских игр. Его силовая линия расположена ближе к центру тяжести тела, что делает использование углеродной пружины более эффективным.
Этот протез стопы, который можно легко адаптировать к потребностям разных людей, носят многие легендарные участники Паралимпийских игр. Его силовая линия расположена ближе к центру тяжести тела, что делает использование углеродной пружины более эффективным.
Видео: Как производятся беговые протезы из углепластика
В состав группы разработчиков новых изделий входил специалист по ортезированию и протезированию (ОиП) Джулиан Напп. Начиная с 2012 г. он руководил работой технического сервисно-ремонтного центра компании Ottobock на Паралимпийских играх. Спортсмены приносят в мастерскую свои протезы и инвалидные коляски, когда они нуждаются в ремонте. Специалист использовал свой практический опыт в процессе разработки новых изделий: «Вы должны работать очень точно, чтобы стопа была правильно расположена по отношению к телу», – говорит он.
Конструкция выпускаемых фирмой Ottobock популярных протезов стопы для бегунов 1E90 Sprinter, которыми пользуется 26-летний Йоханнес Флорс, была изобретена спустя некоторое время после того, как он родился. Протез Sprinter был разработан в Соединенных Штатах в 90-е годы прошлого века; впоследствии компания Ottobock приобрела права на это изделие и усовершенствовала его.
Протез Sprinter был разработан в Соединенных Штатах в 90-е годы прошлого века; впоследствии компания Ottobock приобрела права на это изделие и усовершенствовала его.
Карбоновая стопа надевается на вакуумный патрубок из углеродного волокна, который оснащен выпускным клапаном и уплотнительной втулкой. Культя закрыта и защищена своего рода «чулком» из полимерного материала. Патентованный переходник 1E90, соединяющий гнездо и протез стопы, позволяет легко перенастраивать положение протеза. «При помощи переходника я могу обеспечить идеальную статическую центровку, что позволяет спортсмену бежать без каких-либо ограничений», – объясняет г-н Напп.
Он изготавливает протезы на заказ для различных видов спорта и спортсменов, включая известных спринтеров и прыгунов в длину Генриха Попова и Леона Шефера; «Я очень горжусь тем, что они ставят один мировой рекорд за другим», – говорит г-н Напп. Он также тесно сотрудничает с нынешним рекордсменом мира Йоханнесом Флорсом. «Я стараюсь постоянно корректировать применяемые технические решения, с тем чтобы лучше приспосабливать их к нуждам спортсменов: фактически технологии развиваются вместе со спортсменами», – отмечает г-н Напп. – «Я не смог бы предложить протез, изготовленный для Йоханнеса Флорса, другому спортсмену – например, Леону Шеферу. Скорее всего, он не смог бы с ним быстро бегать. Для каждого случая необходима своя собственная статическая центровка».
– «Я не смог бы предложить протез, изготовленный для Йоханнеса Флорса, другому спортсмену – например, Леону Шеферу. Скорее всего, он не смог бы с ним быстро бегать. Для каждого случая необходима своя собственная статическая центровка».
Специалист по ортезированию и протезированию Джулиан Напп (на фото в центре) вместе с бывшим рекордсменом мира Генрихом Поповым (справа) регулируют повседневный протез спортсмена-паралимпийца Леона Шефера (слева). (Фото предоставлено компанией Ottobock)
Патент на первый механический коленный сустав для спортсменов
Несмотря на изобретение спортивного протеза стопы, спортсмены с трансфеморальной ампутацией ноги выше колена продолжали испытывать проблемы. Некоторые из них носили карбоновую стопу прямо на культе и практически самостоятельно собирали свои протезы из разных компонентов. Результаты этого можно увидеть в спортивных видеороликах, демонстрирующих характерные поворотные движения, которые совершает нога при разгибании. Это помогает бегунам, которые не используют протезы коленных суставов для спортсменов, избежать чрезмерного затягивания фазы переноса конечности. Другие спортсмены участвовали в забегах, пользуясь обычными протезами и полицентрическими протезами суставов, которые на самом деле не подходят для этой цели. Решением проблемы стал первый в мире моноцентрический спортивный протез коленного сустава. Компания Ottobock разработала его на основе протеза 3R80, в отношении которого патент на гидропривод вращательного движения был первоначально выдан в Германии в 1995 г*.
Другие спортсмены участвовали в забегах, пользуясь обычными протезами и полицентрическими протезами суставов, которые на самом деле не подходят для этой цели. Решением проблемы стал первый в мире моноцентрический спортивный протез коленного сустава. Компания Ottobock разработала его на основе протеза 3R80, в отношении которого патент на гидропривод вращательного движения был первоначально выдан в Германии в 1995 г*.
Протез 3S80 оснащен ручной блокировкой и предусматривает возможность индивидуальной настройки характеристик демпфирования; его конструкция отличается компактностью и продуманностью. «Во время бега вес тела, воздействующий на протез, увеличивается вдвое. При беге на короткие дистанции этот показатель увеличивается в пять раз, а у прыгунов в длину – в шесть-семь раз», – говорит Джулиан Напп. Протезы коленных суставов должны выдерживать эту нагрузку, но при этом оставаться достаточно гибкими для ускорения. Иными словами, в данном случае спортивные протезы суставов подстраиваются под спортсменов, а не наоборот, как это было раньше.
Мировая рекордсменка по прыжкам в длину и серебряный призер Паралимпийских игр – 2020 в Токио Мартина Кайрони использует протез ноги выше колена в сочетании со спортивным протезом коленного сустава и карбоновой стопой. (Фото предоставлено компанией Ottobock)
Именно такой спортивный протез коленного сустава использует участница Паралимпийских игр Мартина Кайрони. Г-жа Кайрони, которая является уроженкой Италии, завоевала серебряные медали в прыжках в длину и беге на 100 м на Паралимпийских играх – 2020 в Токио.
В 2007 г. она лишилась левой ноги из-за аварии на мотоцикле. Именно во время реабилитации она осознала, что обладает спортивными талантами. Первые рекорды она начала ставить три года спустя. «На самом деле я никогда не хотела быть профессиональной спортсменкой», – говорит г-жа Кайрони. – «Но после несчастного случая я поняла, насколько хорошо я могу бегать с протезами. Было бы обидно, если бы я не смогла раскрыть свой талант».
Вначале г-жа Кайрони участвовала в спортивных состязаниях со своим обычным протезом, а затем стала использовать протез сустава 3S80 и углеродную пружину 1E91. «Я смогла почувствовать результаты прогресса в развитии технологий прямо на своем теле», – говорит спортсменка, которой исполнился 31 год. – «Этот прогресс непосредственно влияет на мою жизнь».
«Я смогла почувствовать результаты прогресса в развитии технологий прямо на своем теле», – говорит спортсменка, которой исполнился 31 год. – «Этот прогресс непосредственно влияет на мою жизнь».
Международный паралимпийский комитет (МПК) определил четкие правила, учитывающие степень, в которой инвалидность спортсменов влияет на их результаты. По этой причине разрешены только пассивные протезы без электроники.
По словам г-жи Кайрони, поначалу у нее возникли трудности при использовании спортивного протеза из-за его повышенной гибкости, которая благоприятствует ускорению, но снижает его устойчивость. С этим протезом г-жа Кайрони выиграла золотую медаль на Паралимпийских играх – 2012 в Лондоне, пробежав стометровку за 14,65 секунды; она стала единственной спортсменкой, которой удалось преодолеть эту дистанцию меньше, чем за 15 секунд.
В 2013 г. г-жа Кайрони стала чемпионкой мира сразу в двух дисциплинах: прыжках в длину и беге на 100 м. В 2015 г. она установила мировой рекорд в беге на 200 м и выиграла «золото» на чемпионате мира по легкой атлетике среди инвалидов в Дохе.
она установила мировой рекорд в беге на 200 м и выиграла «золото» на чемпионате мира по легкой атлетике среди инвалидов в Дохе.
Новые протезы также повысили качество жизни г-жи Кайрони. В качестве повседневного протеза коленного сустава она использует протез Genium X3; этот «умный» протез автоматически адаптируется к различным ситуациям. «Моя подвижность значительно повысилась», – говорит она. – «Я могу спокойно подниматься по лестнице и ходить в фитнес-центр, что также положительно влияет на мою спортивную карьеру».
Видео: Любовь к Паралимпийским играм (Токио – 2020)
Занятия спортом с протезами – это не «технологический допинг»
Следует отметить, что г-же Кайрони не разрешили использовать ее повседневный электронно-механический протез на Паралимпийских играх. Международный паралимпийский комитет (МПК) определил четкие правила, учитывающие степень, в которой инвалидность спортсменов влияет на их результаты. По этой причине разрешены только пассивные протезы без электроники. Разрешенная длина протезов определяется на основе сложной формулы, которая учитывает рост пользователя и длину бедренной кости. И все же представления СМИ об «усовершенствованных людях» изменить трудно.
По этой причине разрешены только пассивные протезы без электроники. Разрешенная длина протезов определяется на основе сложной формулы, которая учитывает рост пользователя и длину бедренной кости. И все же представления СМИ об «усовершенствованных людях» изменить трудно.
Йоханнес Флорс говорит, что мог бы разбогатеть, если бы ему давали по пять евро за каждый раз, когда его спрашивали, может ли он на своих протезах бегать быстрее, чем профессиональные спортсмены со здоровыми ногами. Ему трудно спокойно воспринимать рассказы о «сверхлюдях» с бионическими конечностями. «Такой подход унижает то, чем я занимаюсь, и побуждает людей думать, что я – это всего лишь мои протезы», – говорит он. – «Получается, что тот факт, что я ежедневно трачу шесть часов на тренировки, не имеет никакого значения! И это при том, что мои спортивные протезы даже нельзя считать высокотехнологичными по сравнению с моими обычными протезами: их конструкция не менялась с 90-х годов прошлого века».
В марте 2021 г. ВОИС опубликовала свой последний отчет из серии «Тенденции развития технологий», который был посвящен ассистивным технологиям: инновациям, которые помогают людям, живущим с функциональными ограничениями (включая, например, ограничения, связанные с подвижностью или зрением), участвовать в жизни во всех ее проявлениях и реализовывать свой потенциал.
ВОИС опубликовала свой последний отчет из серии «Тенденции развития технологий», который был посвящен ассистивным технологиям: инновациям, которые помогают людям, живущим с функциональными ограничениями (включая, например, ограничения, связанные с подвижностью или зрением), участвовать в жизни во всех ее проявлениях и реализовывать свой потенциал.
Этот отчет стал частью серии, в рамках которой отслеживаются тенденции развития технологий путем анализа патентных и других данных для представления достоверной и основанной на фактах информации об инновациях в конкретных областях.
На фоне того, что сегодня более миллиарда человек нуждаются в ассистивных технологиях (эта цифра должна удвоиться в течение следующего десятилетия по мере старения населения), в отчете 2021 г. делается вывод о том, что интеллектуальная собственность (ИС) способствует росту инноваций в сфере ассистивных технологий. Тем не менее эксперты, участвовавшие в подготовке отчета, подчеркивают необходимость того, чтобы эти инновационные решения становились более доступными для тех, кто полагается на них.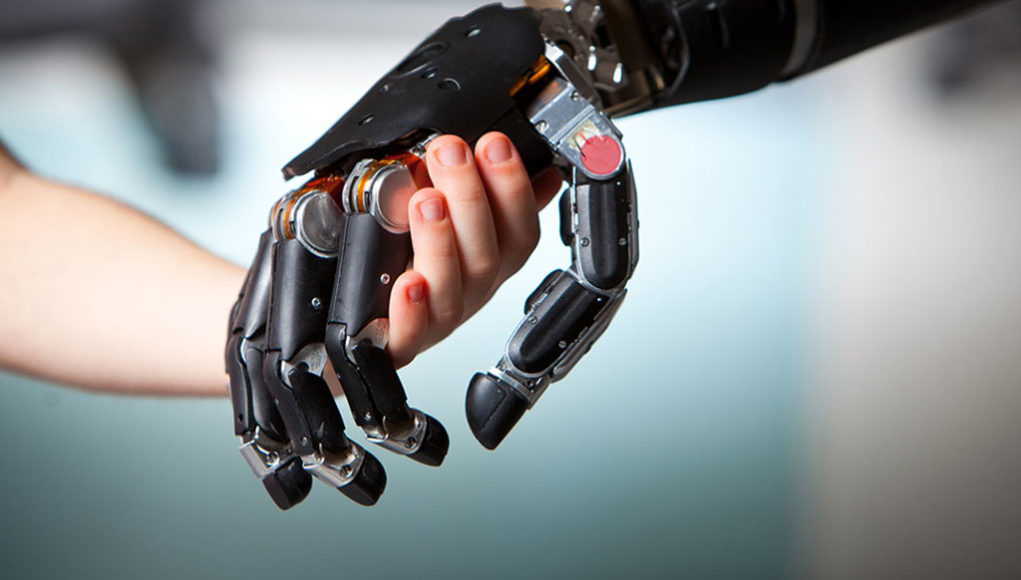 В настоящее время в мире только 1 из 10 человек имеет доступ к необходимым ассистивным устройствам.
В настоящее время в мире только 1 из 10 человек имеет доступ к необходимым ассистивным устройствам.
Цель данного отчета – подготовить информационную основу для глобальных обсуждений, направленных на расширение доступа к ассистивным технологиям.
Основные выводы:
- Инновации – начиная от небольших улучшений существующих изделий и заканчивая последними разработками в области передовых технологий – способны значительно улучшить жизнь людей с функциональными ограничениями, позволяя им жить, общаться и работать независимо.
- В последние годы рост в сфере ассистивных технологий исчислялся двузначными цифрами; они все шире применяются в производстве потребительских товаров.
- Главными двигателями инноваций в сфере ассистивных технологий являются пять стран: Китай, США, Германия, Япония и Республика Корея.
- Количество патентных заявок на новые ассистивные технологии, включая роботов-ассистентов, приложения для умного дома, носимые устройства для слабовидящих и умные очки, растет в три раза быстрее, чем традиционные ассистивные технологии, которые включают усовершенствование конструкции инвалидных колясок и производство аксессуаров к ним, технологии сигнализации об окружении и устройства с поддержкой азбуки Брайля.

- Двумя наиболее быстрорастущими сегментами рынка ассистивных технологий являются технологии, относящиеся к окружению (например, приборы для ориентирования в общественных местах и роботы-ассистенты), и технологии, обеспечивающие мобильность (например, автономные инвалидные коляски и высокотехнологичные протезы).
- Сфера ассистивных технологий сближается с потребительской электроникой и общемедицинскими технологиями: рост наблюдается как в области менее инвазивных ассистивных продуктов (благодаря все более чувствительным датчикам), так и в области более инвазивных решений, таких как имплантаты, помещаемые в ствол головного мозга для восстановления слуха, зрения и подвижности. Технологии, разработанные для людей с функциональными ограничениями, все чаще применяются в производстве продукции широкого спроса. Так, например, технология костной проводимости, которая может помочь при нарушении слуха, также может использоваться в наушниках для бегунов.
- Высокотехнологичные и новые ассистивные продукты предлагаются благодаря развитию и внедрению таких новейших технологий, как искусственный интеллект, «интернет вещей», новые материалы и передовые разработки в сфере робототехники.
- Лидерами в сфере разработок, связанных с ассистивными технологиями, являются такие корпорации, как WS Audiology, Cochlear, Sonova, Second Sight, Ottobock и Össur. С учетом нарастающей тенденции к использованию ассистивных технологий в сфере производства потребительской электроники широкого спроса крупными игроками на этом рынке также являются компании-производители бытовой электроники (например, Panasonic, Samsung, IBM, Google и Hitachi) и автопроизводители (например, «Тойота» и «Хонда»).
- Университеты и государственные научно-исследовательские учреждения играют более заметную роль в области новых ассистивных технологий и проявляют особенную активность в сфере обеспечения мобильности.


Несмотря на прогресс в конструировании протезов, спортсмены-паралимпийцы в своем большинстве бегают медленнее, чем спортсмены-олимпийцы. Паралимпиец Йоханнес Флорс пробегает дистанцию в 200 м за 21,04 секунды, тогда как Усейн Болт, который в настоящее время является самым быстрым в мире бегуном среди людей, не являющихся инвалидами, пробегает ее за 19,19 секунд. За всю историю соревнований по легкой атлетике среди инвалидов лишь очень небольшому числу спортсменов удавалось показывать результаты мирового класса, сопоставимые с результатами спортсменов, не являющихся ампутантами; в их число входят спринтер Йоханнес Флорс и прыгун в длину Маркус Рем. Что касается Оскара Писториуса (по прозвищу «бегущий по лезвию бритвы»), то его личность по многим причинам воспринимается неоднозначно.
За всю историю соревнований по легкой атлетике среди инвалидов лишь очень небольшому числу спортсменов удавалось показывать результаты мирового класса, сопоставимые с результатами спортсменов, не являющихся ампутантами; в их число входят спринтер Йоханнес Флорс и прыгун в длину Маркус Рем. Что касается Оскара Писториуса (по прозвищу «бегущий по лезвию бритвы»), то его личность по многим причинам воспринимается неоднозначно.
За всю историю соревнований по легкой атлетике среди инвалидов лишь очень небольшому числу спортсменов удавалось показывать результаты мирового класса, сопоставимые с результатами спортсменов, не являющихся ампутантами.
«Спортсмены, которые носят протезы, по-прежнему оказываются в неблагоприятном положении на каждом этапе, требующем ускорения, – говорит доктор Томас Шмальц, эксперт по биомеханическому анализу экипировки лучших спортсменов-ампутантов. – «Спортсмены-паралимпийцы пережили травматизирующие несчастные случаи, рак, ампутации и другие тяжелые жизненные события.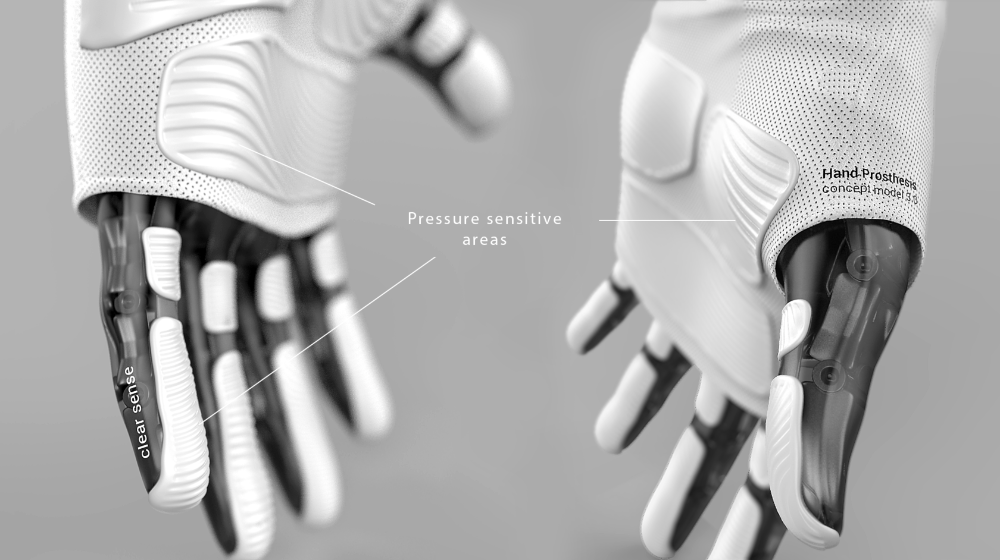 Несмотря ни на что, они остаются спортсменами-инвалидами. Спортсмены с односторонней ампутацией должны компенсировать асимметрию опорно-двигательного аппарата. Отсутствуют эффекты проприоцептивной обратной связи в нервной и мышечной системах. Также отсутствуют ключевые рефлекторные механизмы, запускаемые рецепторами в мускулатуре и сухожилиях», – объясняет доктор Шмальц.
Несмотря ни на что, они остаются спортсменами-инвалидами. Спортсмены с односторонней ампутацией должны компенсировать асимметрию опорно-двигательного аппарата. Отсутствуют эффекты проприоцептивной обратной связи в нервной и мышечной системах. Также отсутствуют ключевые рефлекторные механизмы, запускаемые рецепторами в мускулатуре и сухожилиях», – объясняет доктор Шмальц.
Протезы стопы не обладают внутренней энергией в течение первых нескольких шагов; кроме того, пользователь не воспринимает их как часть своего тела. Исследования в области протезирования направлены на устранение этого недостатка. «В идеале пользователь должен чувствовать, что протез является частью его собственного тела, т.е. естественным продолжением тела», – говорит д-р Андреас Гоппельт, технический директор Ottobock. Его группа научных исследований и разработок реализует проекты, направленные на то, чтобы сделать это реальностью, например, с помощью протезов с обратной связью.
Йоханнес Флорс говорит, что ощущение протеза как части своего тела было бы следующим большим шагом к нормальной жизни. «Я в какой-то мере отождествляю свой протез с собой, но я хотел бы видеть его как еще более неотъемлемую часть себя», – говорит он. – «Но ты не можешь допустить, чтобы это тебя сбило с толку; ты должен добиваться своих целей. И тогда протез больше не помеха!» В Токио – 2020 вся его напряженная работа окупилась, когда он привез домой «золото».
«Я в какой-то мере отождествляю свой протез с собой, но я хотел бы видеть его как еще более неотъемлемую часть себя», – говорит он. – «Но ты не можешь допустить, чтобы это тебя сбило с толку; ты должен добиваться своих целей. И тогда протез больше не помеха!» В Токио – 2020 вся его напряженная работа окупилась, когда он привез домой «золото».
Примечания
*Срок действия патента истек в 2014 г.
БУ «Няганская городская стоматологическая поликлиника»
Зубной
протез — это достаточно сложная биомеханическая конструкция на зубах.
Первоочередная задача зубного протеза — восстановить утраченный зуб так, чтобы
его было сложно отличить от живого зуба.
Протезирование
зубов необходимо в случаях, когда имеющиеся зубы в силу значительного
разрушения не в состоянии выполнять возложенную на них природой функцию, когда
их количество уменьшилось (даже на один), или когда они косметически не
удовлетворяют своего обладателя.
Занимается
протезированием зубов врач стоматолог-ортопед.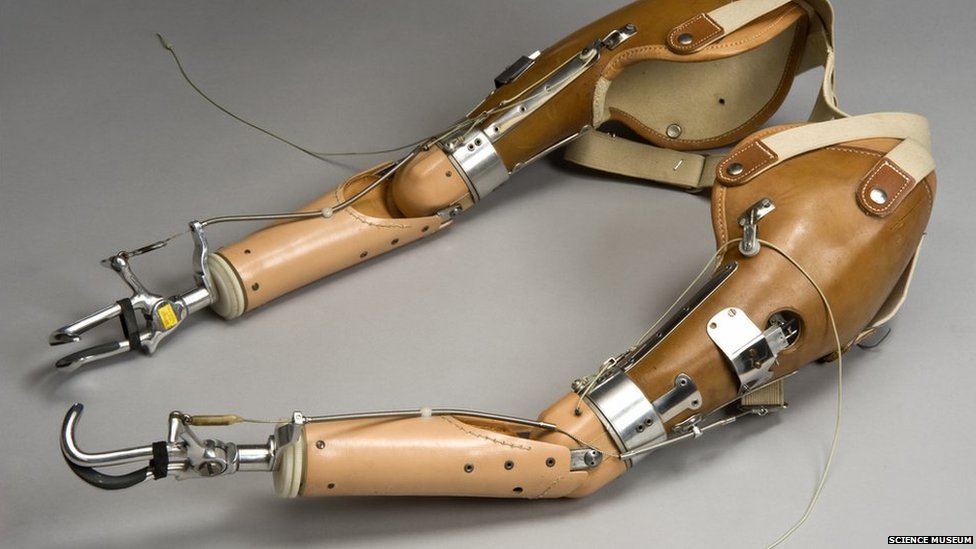 Он должен подобрать такую
Он должен подобрать такую
конструкцию протеза, которая не только заменит пациенту отсутствующие зубы, но
и поможет сохранить оставшиеся зубы на долгое время. На качество протезирования
зубов влияет как квалификация стоматолога, так и оснащенность стоматологической
клиники.
Вкладки
изготавливаются в лаборатории по
индивидуальному слепку, и, по сути, представляют собой пломбы, сделанные с
большой точностью и прочностью из керамики и компомеров. Их используют при
значительном разрушении зуба, когда невозможно смоделировать качественную
пломбу. Раньше неминуемо такие зубы покрывались коронками, а сейчас больше нет
необходимости обтачивать его и изготавливать коронку, достаточно изготовить утраченную
часть зуба и прочно зацементировать её.
Коронка — это вид реставрации, покрывающий
видимую часть зуба со всех сторон и фиксирующийся специальным цементом. В
отличие от пломбы, которая восстанавливает одну или несколько поверхностей
зуба, коронка покрывает зуб полностью
Несъемный мостовидный
протез (мост) — это конструкция, состоящая из одного или нескольких
искусственных зубов, замещающих отсутсвующие зубы и прикрепленных к соседним
естественным зубам при помощи фиксирующих элементов (коронок, вкладок,
пластин).
Виниры
являются
способом изменить форму, цвет, дефект положения зуба и достичь ослепительной
«голливудской» улыбки. Подобный вид протезирования решает
эстетические задачи и требует от врача значительной квалификации и чувства
вкуса. Винир представляет из себя тонкую, обычно керамическую, чешуйку очень
плотно прилегающую к зубу. Для его изготовления снимается тонкий слой зуба и
получается высокоточный оттиск с подготовленного зуба. После изготовления в
лаборатории керамической эмалевой накладки она прочно приклеивается к зубу.
Частичный съемный протез
Частичный
съемный протез используется в случаях, когда утрачен один или несколько зубов.
Он изготавливается целиком из пластмассы, за исключением кламмеров (крючков).
За счет этого протез достаточно лёгкий, относительно нетрудоёмкий в
изготовлении, относительно дёшевый, а также легко трансформируется при
необходимости. Но срок его службы ограничен, он занимает во рту довольно много
места и полностью опирается на десну.![]() Правда, в случаях временного
Правда, в случаях временного
протезирования такой протез бывает просто незаменим.
Полный съемный протез
Такой протез
зачастую является единственной возможностью восполнить все утерянные зубы и
удерживается во рту эффектом присасывания (как два стекла, смоченные каплей
воды) и анатомическими выступами челюстей. Правда, на нижней челюсти фиксация
очень плохая. Поэтому в тех случаях, когда пациент имеет проблемы с
пользованием таким протезом, единственным способом восстановления жевательной
функции является протезирование на имплантатах. По мнению Американской
стоматологической ассоциации подобная ситуация оценивается как инвалидность и
при полном отсутствии зубов необходима имплантация.
Бюгельный протез
Бюгельный —
(происходит от немецкого слова «Bugel», что в переводе на русский
язык означает «дуга»). Такая конструкция зубного протеза позволяет
использовать для опоры не только десны, но и собственные зубы. У бюгельного
протеза более компактный вид, он достаточно удобен, долговечен и прочен. При
При
этом по сравнению с пластиночными съёмными протезами, у бюгельного протеза
способ передачи жевательной нагрузки ближе к физиологическому.
Бюгельные
протезы бывают с кламмерами и с замками. У бюгельных протезов с кламмерами
удержание протеза на зубах осуществляется с помощью особых крючков, которые
плотно охватывают зуб и не причиняют вреда эмали. У бюгельных протезов с
замками крепление протеза очень жёсткое, почти неподвижное. Поэтому большая
часть жевательного давления перераспределяется на опорные зубы, на которые
надеваются специальные металлокерамические коронки. В отличие от кламмеров,
крепление скрыто внутри бюгельного протеза, поэтому снаружи не видно
металлических элементов. Несмотря на это, необходимость снимать и чистить
протез после каждого приема пищи склоняет все большее число пациентов к
установке имплантатов, которые лишены этого недостатка и имеют ряд других
преимуществ.
Протезы на телескопических коронках
Протезы на
телескопических коронках являются разновидностью бюгельных протезов.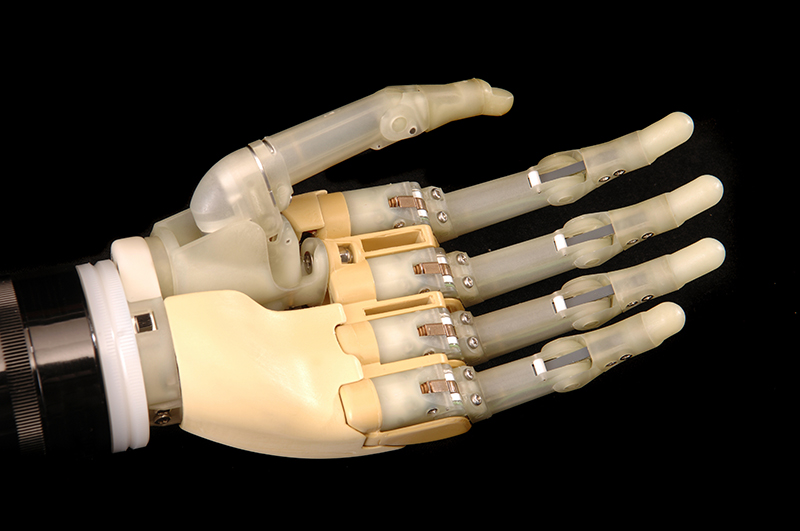 Они
Они
удерживается на зубе с помощью коронки, состоящей из двух частей. Первая часть
является собственно металлокерамической коронкой и снимается. Вторая часть —
металлический колпачок, с параллельными стенками зацементирован на зубе. Как
складывающаяся подзорная труба, коронка садится одна на другую, плотно
удерживаясь на ней.
Поэтому же
принципу могут изготавливаться съёмные мосты. Они нужны в тех случаях, когда
есть необходимость делать большой протез, но уже нельзя жестко крепить
несъёмный мост. Согласно имеющейся научной литературе телескопические коронки
на зубах значительно уступают по долговечности протезированию на имплантатах.
Вот почему в последние годы подобного рода протезы изготавливаются в в
стоматологических клиниках нечасто.
Безметалловая керамика
— новейшее достижение в стоматологии, позволяет изготавливать легкие, надежные
и эстетичные протезы (коронки).
Биомеханика в ортопедической реабилитации — Physiopedia
Оригинальный редактор — Грег Хэлфорд и Амаяк Тарахчян в рамках проекта Всемирной физиотерапевтической сети для реабилитации лиц с ампутированными конечностями
Top Contributors — Admin , Sheik Abdul Khadir , Kim Jackson , Aicha Benyaich , Claire Knott , Amanda Ager , Rachael Lowe , Tony Lowe and Evan Thomas
Содержание
- 1 Введение
- 2 силы
- 3 Центр масс
- 4 Силы наземного реагирования
- 5 моментов или крутящих моментов
- 6 Осевая нагрузка протеза
- 7 Муфта для протеза
- 8 Резюме
- 9 Ресурсы
- 10 Каталожные номера
Понимание биомеханики важно при работе с людьми с ампутированными конечностями и людьми с протезами конечностей. Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Сила — это любое взаимодействие, которое стремится изменить движение объекта [1] . Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Давление равно силе на площади (P=F/A)
Когда площадь, по которой распределяется сила, увеличивается, давление снижается. Если кто-то наступает вам на ногу в шпильке (женская обувь на высоком каблуке с тонким краем), возникает сильное давление (и боль).
Тот же человек, стоящий на вашей ноге на каблуке большего размера, будет вызывать меньшее давление (и боль), потому что площадь больше. Тот факт, что это один и тот же человек, означает, что Сила в этом сценарии постоянна.
Каблук туфли на шпильке будет создавать большое давление на единицу площади. При увеличении площади (на рисунке справа) давление снижается.
В приведенном ниже примере мы видим, что давление также уменьшилось за счет демонстрации эффекта увеличения площади контакта под стопой.
В этом варианте классического сценария «ложе из гвоздей» мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Эта идея используется в конструкции гильзы протеза, чтобы попытаться распределить усилие по достаточно большой площади, чтобы снизить давление до приемлемого уровня.
Часто пациенты просят снять неудобную часть протеза. Иногда, когда это делается, площадь, на которую распространяется сила, уменьшается. Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Общий биомеханический принцип — это понимание центра масс [2] , иногда называемого центром тяжести. Это середина массы объекта, и можно предположить, что сила тяжести действует на объект из этой точки. Это также место, вокруг которого будут происходить вращения.
У человека с ампутированными конечностями в связи с удалением некоторой массы изменяется центр масс человека.
Сила реакции опоры (GRF) возникает при контакте с опорной поверхностью, она равна и противодействует силе, возникающей из-за прохождения массы тела через стопу на поверхность земли [3] .
Следует отметить, что «сила, обусловленная массой тела» включает в себя импульс и ускорение массы тела, а также только воздействие на нее силы тяжести. Следовательно, она отличается и в то же время похожа на весовую линию.
Выравнивание протеза изменяет походку, манипулируя положением нижней конечности и суставов протеза по отношению к силе реакции опоры (подробнее см. здесь).
здесь).
GRF не используется клинически во многих местах из-за сложности его получения в режиме реального времени. Клиницисты могут попытаться понять движения, которые они видят, понимая, какое влияние GRF может оказывать на человеческое тело и протез.
Если Сила не воздействует непосредственно на COM объекта, она будет вращать объект. Если сила не действует через середину соединения с другим сегментом, она изменит угол соединения. В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
При нормальном движении человека момент, создаваемый внешней силой реакции опоры, уравновешивается (по большей части) внутренней мышечной силой, создающей противодействующий момент.
Это общее правило не всегда верно на 100%, но является полезным приближением. В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В этом примере момент тыльного сгибания, создаваемый передней GRF, уравновешивается плантаторными сгибателями за счет напряжения ахиллова сухожилия. Эта мышца имеет фиксированное плечо рычага.
У людей с ампутациями отсутствует прямой мышечный контроль над некоторыми суставами.
У людей с ампутациями отсутствуют части тела, поэтому в некоторых случаях мышечная деятельность не может действовать в качестве противодействия GRF, поскольку мышцы и суставы больше не присутствуют. Если GRF проходит впереди лодыжки у человека с транстибиальной ампутацией, то лодыжка остается достаточно жесткой, чтобы сопротивляться деформации в тыльное сгибание. (Это не относится к механическим протезам стопы, таким как стопа Propio от Ossur).
В случае трансфеморальной ампутации со свободным коленом (без фиксирующего механизма) GRF следует размещать впереди колена на время поддержки одной конечности. Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
В этом сценарии человек с ампутацией продолжает косвенно контролировать колено, хотя и может разгибать тазобедренный сустав. Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Осевая нагрузка протеза[править | править исходный код]
Силы тела в норме передаются от скелетной системы к земле через основание опоры, которое включает структуры подошвенной поверхности стопы (пяточная кость, латеральный продольный свод, плюсневые головки и пальцы). У человека с ампутированной нижней конечностью эта структура может отсутствовать. Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Осевая нагрузка достигается за счет обеспечения достаточной противодействующей силы для сопротивления действию силы тяжести. Эта сила должна быть распределена по участкам, устойчивым к давлению. Хорошее понимание этого необходимо для проектирования гильзы протеза.
Когда мы думаем о силах в протезе, гильза протеза обеспечивает среду для прохождения сил от:
- от земли до человека
И - от человека к земле.
Протезист нагружает кожу давлением, чтобы передать усилия от протеза на костную систему человека с ампутированной конечностью. Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Изменение положения конечности (на некоторое сгибание) может повлиять на доступную площадь для передачи вертикальной силы. Зеленая область под гнездами на рисунке ниже показывает доступную площадь для передачи вертикальной силы.
Чем больше сгибание, тем больше площадь становится доступной для передачи вертикальной силы.
Большее сгибание в суставе может иметь долгосрочные последствия для диапазона движений в суставе и должно тщательно рассматриваться как решение проблем с осевой нагрузкой.
Соединение между гильзой протеза и культей человека с ампутированной конечностью не является полностью жестким. Эту связь можно представить как нечто вроде соединения двух сегментов тела.
На этом снимке мы видим, что GRF человека с ампутацией не «толкает» протез прямо вверх. Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Этому крутящему моменту противодействует сжатие мягких тканей, другими словами, крутящий момент гильзы вызывает давление в определенных частях гильзы протеза предсказуемым образом. Проблемами давления в лунке всегда должен заниматься протезист, который понимает важность выравнивания. Слишком быстрый переход к переделке гнезда не всегда является хорошим решением в клинике. Изменения центровки обычно происходят быстро и легко обратимы с помощью современных компонентов.
К телу человека при протезировании прикладывают силы, это неизменно приводит к давлению. Давлением можно управлять, увеличивая площадь, на которую оно воздействует, и продуманно распределяя его на области, устойчивые к давлению.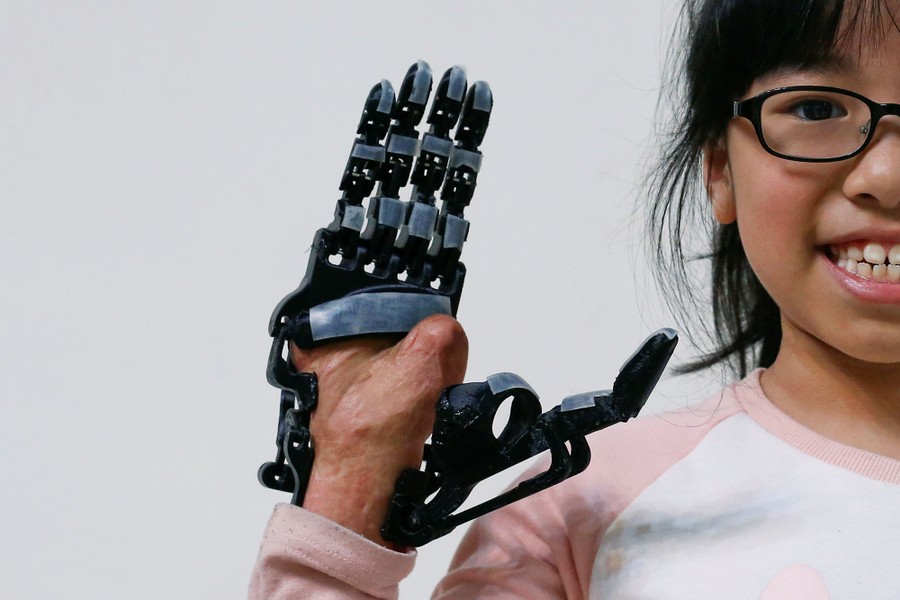 Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Протезист — ключевой специалист, которому поручено управление протезом и его воздействием на организм человека. Присутствие протезиста в составе междисциплинарной команды необходимо для успешной ортопедической реабилитации. Использование знаний биомеханики протезистом дает значительные возможности для оптимизации биомеханических условий для пользователя протеза.
Биомеханика протезирования нижних конечностей
Протезирование нижних конечностей: кинезиология и биомеханика
Нормальная человеческая локомоция, Часть 2: Движение, сила реакции опоры и мышечная активность
Силы наземного реагирования
Коленный направитель WestMARC для многопрофильной бригады протезистов
Учебники
- Левин Д. , Ригардс Дж. и Уиттл М. В. Анализ походки Уиттла. 5-е издание Черчилль Ливингстон 2012 г.
- Киртли Дж. Клинический анализ походки: теория и практика. Черчилль Ливингстон 2006
 , Ригардс Дж. и Уиттл М. В. Анализ походки Уиттла. 5-е издание Черчилль Ливингстон 2012 г.
, Ригардс Дж. и Уиттл М. В. Анализ походки Уиттла. 5-е издание Черчилль Ливингстон 2012 г.- ↑ Force. Википедия. Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.
- ↑ Центр масс человека. Справочник по физике. http://hypertextbook.com/facts/2006/centerofmass.shtml, по состоянию на 8 марта 2015 г.
- ↑ Сила реакции земли. Бесплатный словарь http://medical-dictionary.thefreedictionary.com/ground+reaction+force, по состоянию на 8 марта 2015 г.
Чему может научить биомеханика нормальной походки конструктора протезов нижних конечностей?
- Список журналов
- Рукописи авторов HHS
- PMC3748623
Acta Bioeng Biomech. Авторская рукопись; доступно в PMC 2013 21 августа.
Авторская рукопись; доступно в PMC 2013 21 августа.
Опубликовано в окончательной редакции как:
Acta Bioeng Biomech. 2013; 15(1): 3–10.
PMCID: PMC3748623
NIHMSID: NIHMS462813
PMID: 23957208
Информация об авторе Информация об авторских правах и лицензии Отказ от ответственности
Компенсация потери конечности с помощью протеза является сложной задачей из-за сложности человеческого тела, которая не может быть полностью согласована с доступными техническими средствами. Разработчик протезов нижних конечностей хочет знать, какая спецификация устройства может обеспечить наилучшее приближение к нормальной локомоции. Глубокое понимание последнего важно, и анализ походки может быть ценным инструментом для этого. После изготовления протеза анализ походки может помочь в сравнении производительности пользователя с новым устройством и с предшествующим уровнем техники, а также в проверке гипотез, выдвигаемых в процессе разработки. В этой лекции мы обсудим некоторые синергии нормальной походки. Мы сосредоточимся на необходимых биомеханических свойствах протеза ноги, которые могут позволить включить протез в нормальную синергию ходьбы, не требуя чрезмерных компенсаторных движений. Мы рассмотрим вклад суставов ног в создание движения для адекватной конструкции протезов нижних конечностей, особенно с источником питания.
В этой лекции мы обсудим некоторые синергии нормальной походки. Мы сосредоточимся на необходимых биомеханических свойствах протеза ноги, которые могут позволить включить протез в нормальную синергию ходьбы, не требуя чрезмерных компенсаторных движений. Мы рассмотрим вклад суставов ног в создание движения для адекватной конструкции протезов нижних конечностей, особенно с источником питания.
Ключевые слова: биомеханика , протезирование , антропоморфность
Компенсация потери конечности протезированием является сложной задачей из-за сложности человеческого организма, которая не может быть полностью решена доступными техническими средствами. Разработчик протезов нижних конечностей хочет знать, какая спецификация устройства может обеспечить наилучшее приближение к нормальной локомоции. Глубокое понимание последнего важно, и анализ походки может быть ценным инструментом для этого. После изготовления протеза анализ походки может помочь в сравнении производительности пользователя с новым устройством и с предшествующим уровнем техники, а также в проверке гипотез, выдвигаемых в процессе разработки. В этой статье мы обсудим некоторые синергии нормальной походки. Мы сосредоточимся на необходимых биомеханических свойствах протеза ноги, которые могут позволить включить протез в нормальную синергию ходьбы, не требуя чрезмерных компенсаторных движений. Мы рассмотрим вклад суставов ног в создание движения для адекватной конструкции протезов нижних конечностей, особенно с источником питания.
В этой статье мы обсудим некоторые синергии нормальной походки. Мы сосредоточимся на необходимых биомеханических свойствах протеза ноги, которые могут позволить включить протез в нормальную синергию ходьбы, не требуя чрезмерных компенсаторных движений. Мы рассмотрим вклад суставов ног в создание движения для адекватной конструкции протезов нижних конечностей, особенно с источником питания.
Вклад анализа походки в цикл проектирования протеза нижней конечности схематически изображен на рис. Порядок расположения блоков диаграммы относительно друг друга может различаться в зависимости от того, как инициируется процесс. Она может начаться с новой гипотезы о необходимости воспроизведения в протезе определенных характеристик походки. Это порекомендует провести исследование походки со следующими конкретными параметрами походки, чтобы проверить, верна ли гипотеза. Если результаты исследования будут положительными, может быть предложен набор рекомендаций по дизайну для прототипирования и дальнейшего тестирования, включая исследование биомеханики походки человека с ампутированной конечностью, носящего новый протез, чередующийся с существующими протезами. Результаты такого сравнительного исследования могут показать, что текущий прототип нуждается в доработках или даже серьезных изменениях. В этом случае следует начать новый цикл разработки с соответствующими исследованиями анализа походки.
Результаты такого сравнительного исследования могут показать, что текущий прототип нуждается в доработках или даже серьезных изменениях. В этом случае следует начать новый цикл разработки с соответствующими исследованиями анализа походки.
Открыть в отдельном окне
Схема цикла проектирования нижней конечности
Вся история протезирования движима стремлением к антропоморфности протеза. Дизайнер сознательно или интуитивно использует концепцию антропоморфизма при выборе анатомических особенностей ноги, которые должны быть воспроизведены в протезе. Адекватность этого выбора будет оцениваться функциональностью и приемлемостью устройства для людей с ампутированными конечностями. Не существует общего соглашения о значении термина антропоморфизм применительно к конкретным ситуациям, включая протезирование. Это всегда вопрос восприятия и умения работать с определенными конструктивными характеристиками продукта.
Традиционный критерий антропоморфности – «структурный», связанный с необходимостью компенсации укорочения ноги после ампутации. Еще одним критерием является «космезис», когда должны быть соблюдены визуальные, тактильные и другие анатомические характеристики. Больше критериев антропоморфности исходило из биомеханики передвижения в норме и с протезами. В этой статье мы более подробно рассмотрим критерий момента [1], [2] и то, как он был разработан и проверен анализом походки [3].
Еще одним критерием является «космезис», когда должны быть соблюдены визуальные, тактильные и другие анатомические характеристики. Больше критериев антропоморфности исходило из биомеханики передвижения в норме и с протезами. В этой статье мы более подробно рассмотрим критерий момента [1], [2] и то, как он был разработан и проверен анализом походки [3].
Любое движение конечностей представляет собой комбинацию вращений в суставах. Поэтому современная биомеханика как наука началась с применения понятия момента для описания связи между силами, создаваемыми мышцами, и результирующими движениями. Впервые это сделал итальянский ученый Джованни Альфонсо Борелли в рукописи De Motu Animalium [4]. Борелли показал, что рычаги опорно-двигательного аппарата усиливают движение, а не силу, и определил положение центра тяжести человека.
Зависимость «угол-момент» в анатомическом голеностопном суставе во время фазы опоры имеет вогнутую форму (), что указывает на то, что начало тыльного сгибания встречает небольшое сопротивление, которое нелинейно возрастает до своего наивысшего уровня в конце тыльного сгибания. В фазе опоры выделяют семь последовательных событий, начиная с события 1 «пятка на пятке». В промежутке между событиями 2 и 3 завершается первое подошвенное сгибание, и подошва стопы находится в полном контакте с поверхностью для ходьбы. Затем начинается дорсифлексия, которая продолжается до события 5 «отрыв пятки». Пятка поднимается, и вращение переходит с голеностопного сустава на вращение в плюсневом суставе (события 6–7). Далее мы увидим, что этот перенос использует инерцию и как таковой является компонентом баллистической синергии походки. Вогнутая форма графика момента в период тыльного сгибания предполагает очень небольшое сопротивление тыльному сгибанию в начале периода (2–3), быстрое увеличение сопротивления перед «отрывом пятки» (4–5) и быстрое падение во время второго подошвенного сгибания (7).
В фазе опоры выделяют семь последовательных событий, начиная с события 1 «пятка на пятке». В промежутке между событиями 2 и 3 завершается первое подошвенное сгибание, и подошва стопы находится в полном контакте с поверхностью для ходьбы. Затем начинается дорсифлексия, которая продолжается до события 5 «отрыв пятки». Пятка поднимается, и вращение переходит с голеностопного сустава на вращение в плюсневом суставе (события 6–7). Далее мы увидим, что этот перенос использует инерцию и как таковой является компонентом баллистической синергии походки. Вогнутая форма графика момента в период тыльного сгибания предполагает очень небольшое сопротивление тыльному сгибанию в начале периода (2–3), быстрое увеличение сопротивления перед «отрывом пятки» (4–5) и быстрое падение во время второго подошвенного сгибания (7).
Открыть в отдельном окне
Зависимость голеностопного момента от угла голеностопного сустава в норме. События 1–7 соответствуют последовательным фазам стойки, начиная с «пятки на пятке» (Center for Human Performance, New England Sinai Hospital, Stoughton, MA). Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Эта последовательность событий предполагает, что основная роль момента в анатомическом голеностопном суставе заключается в замедлении тыльного сгибания и блокировке голеностопного сустава, облегчая баллистический отрыв пятки. , но не для создания движения тела.
Кажется логичным воспроизвести эту анатомическую диаграмму «угол-момент» в протезе голеностопного сустава, создав конструкцию, сопротивление которой дорсифлексии существенно нелинейно с медленным подъемом и скачкообразным увеличением, когда сустав должен быть заблокирован. .
Далее мы увидим, как можно спроектировать протез голеностопного сустава с диаграммой «лодыжка-момент», подобной показанной на рис. Во-первых, мы должны проверить, создает ли анатомическая лодыжка активный момент (крутящий момент), который является источником движения центра масс тела. Это вполне практический вопрос, напрямую влияющий на спецификацию протеза.
Роль анатомической стопы и голеностопного сустава в создании движения исследовалась во многих лабораториях по чисто научным причинам и в ответ на потребности в реабилитации. С 1939 года, когда они стали доступны, данные силовой пластины предоставили основные объективные данные для понимания функционирования стопы. Анализируя передачу энергии во время шага, Эльфтман впервые представил классическую бимодальную кривую вертикальной опорной реакции [5]. Он пришел к выводу, что на заключительном этапе периода опоры остальная часть тела получала энергию от ноги. Это соображение послужило основой для теории отталкивания как основного источника движения тела.
Подтверждение теории о главной роли подошвенных сгибателей голеностопного сустава ( m. икроножной мышцы и m. камбаловидной мышцы ) в движении тела во время второго пика опорной реакции исходит из того факта, что максимальная ЭМГ-активность 3 голени голени при отталкивании совпадает с большим увеличением общей механической энергии тела. Кроме того, высокая мощность, генерируемая в голеностопном суставе, превышает мощность в коленном и тазобедренном суставах [6]–[10].
Кроме того, высокая мощность, генерируемая в голеностопном суставе, превышает мощность в коленном и тазобедренном суставах [6]–[10].
В отличие от теории движения «отталкивания», были исследования, в которых движение вперед не приписывалось голеностопному суставу [11]–[14]. Другие исследователи приписывали подошвенным сгибателям голеностопного сустава ускорители, облегчающие движение ноги в фазу переноса [15]–[17]. В исследовании Meinders et al. показали, что во время отталкивания генерировалось 23,1 Дж энергии, в основном подошвенными сгибателями голеностопного сустава, но только 4,2 Дж этой энергии передавалось туловищу. Авторы пришли к выводу, что работа подошвенного сгибателя голеностопного сустава заключается, прежде всего, в ускорении движения ноги. Они также предположили, что существующие разногласия по поводу роли подошвенного сгибания стопы возникают из-за множества ролей, которые стопа играет в передвижении человека.
Как мы показали в сравнительном исследовании походки и в компьютерной модели [17], сгибательный момент в голеностопном суставе может быть пропульсивным только при блокировке коленного сустава той же ноги. Так как при обычном подъеме коленный сустав начинает сгибаться раньше, чем голеностопный сустав начинает подошвенное сгибание, передача импульса толчка к центру масс тела ограничена, а сгибательный момент в голеностопном суставе не способствует перемещению центра масс. , но нога в качелях.
Так как при обычном подъеме коленный сустав начинает сгибаться раньше, чем голеностопный сустав начинает подошвенное сгибание, передача импульса толчка к центру масс тела ограничена, а сгибательный момент в голеностопном суставе не способствует перемещению центра масс. , но нога в качелях.
4.1. Моделирование движения при обычной походке
Чтобы проиллюстрировать синергию лодыжки и колена, рассмотрим компьютерную модель движения при обычной походке с помощью программного обеспечения Working Model 1 . Модель () состоит из двух ног, каждая из которых имеет по три звена (стопа, голень и бедро). Крутящий момент μ в голеностопном суставе задней ноги имитирует подошвенное сгибание стопы. Центр масс имеет начальную скорость V 0 , приобретённую в конце фазы переноса передней ноги. Колено передней ноги имеет пассивную вращательную пружину, имитирующую сгибание/разгибание колена в стойке. В колене ведомой ноги допускается свободное вращение, что обеспечивает баллистическую стойку сгибания в колене под действием силы тяжести. Статические моменты конечностей принимались в соответствии с антропоморфными данными сегментов ног [18].
Статические моменты конечностей принимались в соответствии с антропоморфными данными сегментов ног [18].
Открыть в отдельном окне
«Рабочая модель» имитация обычной походки. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Кинематика модели напоминает ходьбу на нормальном уровне с перемещением центра масс вперед и вверх после подошвенного сгибания стопы. Однако остается неясным, что было основным источником движения центра масс тела. Неопределенность вызвана одновременным вкладом крутящего момента в голеностопе задней ноги и наличием кинетической энергии центра масс со скоростью В 0 . Чтобы разрешить противоречие, мы разделили действие крутящего момента голеностопного сустава и кинетической энергии центра масс в следующих двух моделях.
4.2. Компьютерное моделирование движения в статическом этапе
Модель, показанная в, отличается от модели движения с обычной походкой () обнулением начальной скорости V 0 центра масс тела. Все остальные характеристики модели одинаковы. Моделирование фильма «Рабочая модель» начинается с крутящего момента μ, действующего на лодыжку задней ноги. Как видно из , ведомая нога сгибается в колене и переходит в мах аналогично модели обычной походки, но положение центра масс не меняется. Это указывает на то, что отталкивающее действие задней ноги не могло привести к движению тела, несмотря на то, что к лодыжке и стопе был приложен момент подошвенного сгибания.
Все остальные характеристики модели одинаковы. Моделирование фильма «Рабочая модель» начинается с крутящего момента μ, действующего на лодыжку задней ноги. Как видно из , ведомая нога сгибается в колене и переходит в мах аналогично модели обычной походки, но положение центра масс не меняется. Это указывает на то, что отталкивающее действие задней ноги не могло привести к движению тела, несмотря на то, что к лодыжке и стопе был приложен момент подошвенного сгибания.
Открыть в отдельном окне
«Рабочая модель» имитация события «отталкивания» в статической стадии ( V 0 = 0). Подошвенное сгибание стопы не создает движения центра масс тела. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
4.3. Компьютерное моделирование преднамеренного движения
Модель, представленная на рис., имитирует испытание человека с заданием на намеренное движение с преимущественным использованием крутящего момента в голеностопном суставе ведомой ноги. Его начальная стадия статическая ( V 0 = 0) как в модели , но в отличие от этого колено задней ноги заблокировано. Когда начинается симуляция фильма «Рабочая модель», задняя нога передает импульс от подошвенного сгибания стопы к центру масс. Как видно из , положение центра масс меняется подобно модели обычной походки ().
Его начальная стадия статическая ( V 0 = 0) как в модели , но в отличие от этого колено задней ноги заблокировано. Когда начинается симуляция фильма «Рабочая модель», задняя нога передает импульс от подошвенного сгибания стопы к центру масс. Как видно из , положение центра масс меняется подобно модели обычной походки ().
Открыть в отдельном окне
«Рабочая модель» имитация события «отталкивания» в статической стадии ( В 0 = 0) с заблокированным коленом задней ноги. Кадры отображаются с интервалом 0,05 с. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
4.4. Исследование походки, сравнивающее регулярное и преднамеренное отталкивание
Чтобы разработать убедительные аргументы в пользу или против теории отталкивания, мы разработали исследование походки для сравнения отталкивания при обычной походке и при походке с преднамеренно преувеличенным толчком. -отключение задней ногой.
Вертикальная линия () определяет время между фазами опоры и маха и составляет примерно 60% времени шага. Мощность в голеностопном суставе достигает максимума в конце фазы опоры (). Пик мощности голеностопного сустава коррелирует с уменьшением тыльного сгибания и переходом в подошвенное сгибание. Тот факт, что максимум мощности совпадает с началом подошвенного сгибания стопы, можно рассматривать как указание на то, что голеностопный сустав является генератором толчкового толчка. Однако это можно интерпретировать таким образом, только если брать его независимо от данных о работе колена. Если мы добавим к нашему рассмотрению работу коленного сустава, то придем к другому результату. Действительно, сгибание в колене начинается одновременно с подошвенным сгибанием стопы и даже немного раньше подошвенного сгибания. Поскольку колено податливое, оно поглощает импульс отталкивания от стопы. Следовательно, он не может передать этот импульс ЦМ тела, в отличие от традиционного представления [8]. Податливость колена, когда стопа находится в подошвенном сгибании, может объяснить низкую скорость (приблизительно 25%) передачи мощности, генерируемой сгибателями стопы, на туловище [16].
Мощность в голеностопном суставе достигает максимума в конце фазы опоры (). Пик мощности голеностопного сустава коррелирует с уменьшением тыльного сгибания и переходом в подошвенное сгибание. Тот факт, что максимум мощности совпадает с началом подошвенного сгибания стопы, можно рассматривать как указание на то, что голеностопный сустав является генератором толчкового толчка. Однако это можно интерпретировать таким образом, только если брать его независимо от данных о работе колена. Если мы добавим к нашему рассмотрению работу коленного сустава, то придем к другому результату. Действительно, сгибание в колене начинается одновременно с подошвенным сгибанием стопы и даже немного раньше подошвенного сгибания. Поскольку колено податливое, оно поглощает импульс отталкивания от стопы. Следовательно, он не может передать этот импульс ЦМ тела, в отличие от традиционного представления [8]. Податливость колена, когда стопа находится в подошвенном сгибании, может объяснить низкую скорость (приблизительно 25%) передачи мощности, генерируемой сгибателями стопы, на туловище [16].
Открыть в отдельном окне
Регулярная походка на выбор скорости и стиля. Угол сгибания/разгибания, момент и сила в суставах левой (красная) и правой (зеленая) ноги: а — голеностопный сустав; б) колено; в) бедро. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Возникает резонный вопрос: если подошвенное сгибание стопы (отталкивание) отставающей ногой не создает толчка тела, то как создается толчок? Сравнивали моменты в коленных и тазобедренных суставах с вертикальной составляющей опорной реакции. Сравнение показывает, что пики обоих моментов возникают одновременно на 10–15 % шага, совпадая с первым максимумом вертикальной составляющей опорной реакции. Это синхронное разгибание в коленном и тазобедренном суставах передней ноги (1) обеспечивает восходящее ускорение ЦМ и является основным источником толчка, как мы предположили ранее [19].], так и другими исследователями [20].
Тот же субъект, чьи данные о обычной походке показаны на рис.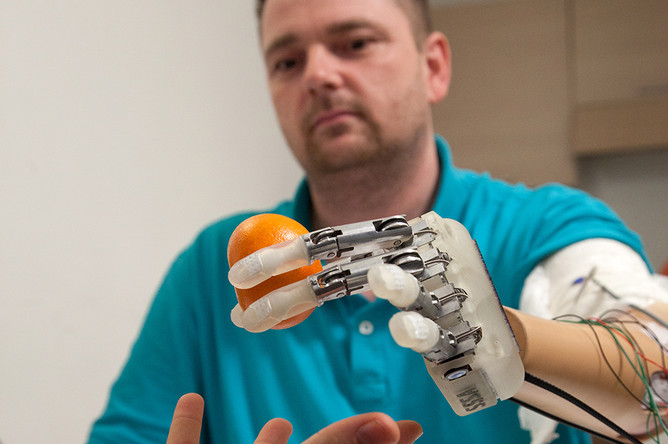 , был проинструктирован ходить, создавая преднамеренное отталкивание с ощущением своей стопы как основного привода для движения тела. При этом испытуемый сообщал о дополнительной нагрузке на икроножные мышцы и дополнительном давлении на подошву передней части стопы. Кинематические и динамические данные (1) показывают, что по сравнению с обычной походкой, походка с преднамеренным отталкиванием была связана с большей силой в голеностопном суставе и с блокировкой колена ведомой ноги. Блокировка колена не была частью инструкций для испытуемого и произошла непреднамеренно.
, был проинструктирован ходить, создавая преднамеренное отталкивание с ощущением своей стопы как основного привода для движения тела. При этом испытуемый сообщал о дополнительной нагрузке на икроножные мышцы и дополнительном давлении на подошву передней части стопы. Кинематические и динамические данные (1) показывают, что по сравнению с обычной походкой, походка с преднамеренным отталкиванием была связана с большей силой в голеностопном суставе и с блокировкой колена ведомой ноги. Блокировка колена не была частью инструкций для испытуемого и произошла непреднамеренно.
Открыть в отдельном окне
Нормальная походка с заданием умышленно усиленного отталкивания стопы. Угол сгибания/разгибания, момент и сила в суставах левой (красная) и правой (зеленая) ноги: а — голеностопный сустав; б) колено; в) бедро. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
. максимум наступал заметно раньше, чем при нормальной регулярной походке. Замедление и прекращение тыльного сгибания в голеностопном суставе и переход к подошвенному сгибанию также происходит заметно раньше, чем при нормальной обычной походке. Амплитуда голеностопного угла и амплитуда голеностопного момента примерно на 25% выше.
Амплитуда голеностопного угла и амплитуда голеностопного момента примерно на 25% выше.
Увеличение угла лодыжки, момента и мощности указывает на то, что субъект смог сильнее отталкиваться ногой. Можно ли заключить, что это отталкивание действительно было движением тела? Мы считаем, что ответ должен быть утвердительным из-за следующих аргументов:
Активное сгибание стопы коррелирует с фиксацией коленного сустава в разогнутом положении ().
Эта блокировка производится моментом, величина которого заметно выше, чем при нормальной правильной походке ().
Следовательно, пропульсивный импульс не амортизируется в колене, а передается в ЦМ тела.
Нелинейный момент сопротивления вращению может быть создан даже при линейных связях, если вместо одноосного шарнирного соединения использовать качение контактирующих поверхностей [21]. В анатомических суставах эпифизарные поверхности головок костей в большинстве случаев обеспечивают этот тип кулачкового качения. Поэтому ангуляция в суставе может быть представлена как перекатывание головки верхней кости по головке нижней кости с начальным контактом двух поверхностей в точке С1 (). Пусть эластичная связка начальной длины L1 представляет собой мышцы и связки, ограничивающие ангуляцию (перекатывание). В результате качения без проскальзывания верхней кости обе кости соприкоснутся в точке С2, а удлиненная стяжка будет иметь длину L2 (). Момент М 2 сопротивления качению будет произведением натяжения удлиненной стяжки и плеча рычага r 2 . Как было показано в [21], вторая производная М 2 в зависимости от угла качения будет положительной, что свидетельствует о вогнутом характере зависимости «угол-момент».
Поэтому ангуляция в суставе может быть представлена как перекатывание головки верхней кости по головке нижней кости с начальным контактом двух поверхностей в точке С1 (). Пусть эластичная связка начальной длины L1 представляет собой мышцы и связки, ограничивающие ангуляцию (перекатывание). В результате качения без проскальзывания верхней кости обе кости соприкоснутся в точке С2, а удлиненная стяжка будет иметь длину L2 (). Момент М 2 сопротивления качению будет произведением натяжения удлиненной стяжки и плеча рычага r 2 . Как было показано в [21], вторая производная М 2 в зависимости от угла качения будет положительной, что свидетельствует о вогнутом характере зависимости «угол-момент».
Открыть в отдельном окне
Относительное качание контактной поверхности в стыке: 1 – линейное удлинение эластичной связи; 2 – удлинение плеча рычага резистивного момента за счет качения. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Аналитическая геометрия признает особый класс кривых с общим началом. Точка, прикрепленная к телу, катящемуся по другому телу, порождает их все (трохоиды). Тип трохоидальной кривой зависит от формы и взаимной ориентации обоих тел, а также от положения образующей точки относительно окружности тела качения.
Точка, прикрепленная к телу, катящемуся по другому телу, порождает их все (трохоиды). Тип трохоидальной кривой зависит от формы и взаимной ориентации обоих тел, а также от положения образующей точки относительно окружности тела качения.
Для разработки параметров трохоидального механизма протеза голеностопного сустава решалась задача синтеза «точек точности» плоскостного сустава [2]. Первый протез стопы и голеностопного сустава Rolling Joint с трохоидальным механизмом [22], [23] был разработан компанией Ohio Willow Wood Company, Маунт Стерлинг, Огайо, под названием 9.0199 Стопа и голеностопный сустав Free-Flow . Ключевой особенностью протеза было воспроизведение момента сопротивления, наблюдаемого в анатомической лодыжке. В этой конструкции были выполнены три основных требования: относительно свободная артикуляция в искусственном голеностопном суставе в начале тыльного сгибания, нелинейное увеличение момента сопротивления как средство остановки тыльного сгибания и самонастройка на скорость передвижения. Дизайн достиг двух целей функциональности протеза: минимизация давления на остаток и нормализация сгибания опорного колена в незадействованной ноге.
Дизайн достиг двух целей функциональности протеза: минимизация давления на остаток и нормализация сгибания опорного колена в незадействованной ноге.
Более податливый коленный механизм в стопе и голеностопном суставе Rolling Joint снижает межфазные силы и давления между культей и суставной впадиной, нормализует положение-сгибание анатомического колена у пациентов с транстибиальной ампутацией, улучшает симметрию в отдаленных временных характеристиках [ 24].
Положительные отзывы пользователей Free-Flow Foot and Ankle способствовали разработке хоккейного хоккея стоя с ампутированными конечностями (www.isihf.org). Отдаленные результаты реабилитации с использованием протезов Rolling Joint были проанализированы в хоккейной игре игроков с ампутированными конечностями [25].
Антропоморфный протез должен имитировать картину моментов в суставах, наблюдаемую при здоровой походке.
Открыть в отдельном окне
Роликовый шарнирный протез « Free-Flow Foot and Ankle » производства Ohio Willow Wood Co. : 1 – настроечный винт для регулировки начальной жесткости; 2 – большеберцовая поверхность контакта качения; 3 – эластичная подушка; 4 – базовая таранная поверхность контакта качения (предоставлено компанией Ohio Willow Wood Company, Mt. Sterling, OH). Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
: 1 – настроечный винт для регулировки начальной жесткости; 2 – большеберцовая поверхность контакта качения; 3 – эластичная подушка; 4 – базовая таранная поверхность контакта качения (предоставлено компанией Ohio Willow Wood Company, Mt. Sterling, OH). Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
Открыть в отдельном окне
Демонстрационная игра в хоккей с ампутированными конечностями стоя во время Всемирного конгресса ISPO 2004 в Гонконге. Воспроизведено из [3] с любезного разрешения Springer Science+Business Media
. Эта работа частично поддержана грантами NIH AR43290, HD38143, HD047493 и HD057492. Материал этой лекции частично дублирует элементы из глав 1–5 нашей предыдущей работы (Питкин М., Биомеханика протезирования нижних конечностей . Springer-Verlag, Berlin Heidelberg, 2010) с любезного разрешения Springer Science+Business Media.
* Основной доклад на Международной конференции Польского общества биомехаников «БИОМЕХАНИКА 2012», 16–19 сентября, Белосток, Польша
1 Design Simulation Technologies, Inc. Canton, MI 48187, USA.
Canton, MI 48187, USA.
[1] Питкин М. Механический результат протеза стопы с вращающимся суставом и его эффективность в фазе тыльного сгибания транстибиальной ампутированной походки. Журнал протезирования и ортопедии. 1995;7(4):114–123. [Бесплатная статья PMC] [PubMed] [Google Scholar]
[2] Питкин М.Р. Синтез циклоидального механизма протеза голеностопного сустава. Протез. ортот. Междунар. 1996;20(3):159–171. [Бесплатная статья PMC] [PubMed] [Google Scholar]
[3] Питкин М.Р. Биомеханика протезирования нижних конечностей. Спрингер; Гейдельберг, Дордрехт, Лондон, Нью-Йорк: 2010. [Google Scholar]
[4] Борелли Г.А. Де Моту Анималиум … Opum Posthumum. Romae, ex Typographia Angeli Bernabo. : 1680–1681. Томо I, тав. IV [Google Scholar]
[5] Эльфтман Х. Изменения сил и энергии в ноге при ходьбе. Являюсь. Дж. Физиол. 1939;125(2):339–356. [Google Scholar]
[6] Sutherland DH. Электромиографическое исследование подошвенных сгибателей голеностопного сустава при обычной ходьбе по ровной поверхности. J. Хирургия суставов костей. Являюсь. 1966; 48 (1): 66–71. [PubMed] [Google Scholar]
J. Хирургия суставов костей. Являюсь. 1966; 48 (1): 66–71. [PubMed] [Google Scholar]
[7] Зимний окружной прокурор. Биомеханика движений человека. Джон Уилли и сыновья, Inc.; New York: 1979. [Google Scholar]
[8] Хоф А.Л., Гилен Б.А., Ван ден Берг Дж. Момент икроножной мышцы, работа и эффективность при ровной ходьбе; роль эластичности ряда. Дж. Биомех. 1983;16(7):523–537. [PubMed] [Google Scholar]
[9] Перри Дж. Анализ походки: нормальная и патологическая функция. Торофэр, Слэк, Инк.; NJ: 1992. [Google Scholar]
[10] Kepple TM, Siegel KL, Holdena JP, Stanhope SJ. Относительный вклад суставных моментов нижних конечностей в продвижение вперед и поддержку во время ходьбы. Походка и осанка. 1997;6(1):1–8. [Google Scholar]
[11] Сондерс Дж. Б., Инман В. Т., Эберхарт Х. Д. Основные детерминанты нормальной и патологической походки. J. Хирургия суставов костей. Являюсь. 1953;35-А(3):543–558. [PubMed] [Google Scholar]
[12] Breakey J. Походка при односторонней ампутации ниже колена. Орт. Прост. 1976;30(4):17–24. [Google Scholar]
Орт. Прост. 1976;30(4):17–24. [Google Scholar]
[13] Чернецкий Ю.М. Реабилитация при недостаточности конечностей. 1. Анализ походки и движений. Арка физ. Мед. Реабилит. 1996; 77 (3 Дополнение): S3–8. [PubMed] [Google Scholar]
[14] Киртли С. Клинический анализ походки: теория и практика. Эльзевир; Эдинбург, Нью-Йорк: 2005. [Google Scholar]
[15] Dillingham TR, Lehmann JF, Price R. Влияние нижних конечностей на движение тела. Арка физ. Мед. Реабилит. 1992;73(7):647–651. [PubMed] [Google Scholar]
[16] Meinders M, Gitter A, Czerniecki JM. Роль работы подошвенных сгибателей голеностопного сустава при ходьбе. Сканд. Дж. Реабилит. Мед. 1998;30(1):39–46. [PubMed] [Google Scholar]
[17] Питкин М. Регулярная и преднамеренная генерация движения при нормальной походке как прототип конструкции протеза. Международная конференция IEEE Eurocon 2009; Санкт-Петербург, Россия. 18-23 мая 2009 г. [Google Scholar]
[18] McCronville J, Churchill T, Kaleps I, Clauser C, Cuzzi J. Антропометрические соотношения моментов инерции тела и сегментов тела. Антропологический исследовательский проект, Inc.; Йеллоу-Спрингс, Огайо: 1980. [Google Scholar]
Антропометрические соотношения моментов инерции тела и сегментов тела. Антропологический исследовательский проект, Inc.; Йеллоу-Спрингс, Огайо: 1980. [Google Scholar]
[19] Питкин М. Кинематический и динамический анализ походки человека. Материалы Первой Всесоюзной конференции по биомеханике, РНИИТО; Рига, Латвия. 1975. С. 279–283. [Google Scholar]
[20] Riley PO, Della Croce U, Kerrigan DC. Пропульсивная адаптация к изменению скорости ходьбы. Дж. Биомех. 2001;34(2):197–202. [PubMed] [Google Scholar]
[21] Питкин М. Механика Твердого Тела. 6. Том. 10. Известия АН СССР; Москва: 1975. Механика подвижности стопы человека; стр. 40–45. [Google Scholar]
[22] Питкин М. Патент № 5, 376, 139. Бюро по патентам и товарным знакам США; Вашингтон, округ Колумбия: 1994. Искусственная стопа и лодыжка. [Google Scholar]
[23] Питкин М., Хейс Дж., Шринивасан С., Колвин Дж. Искусственная стопа и лодыжка. Патент США 62
. 2001
[24] Питкин М. Снижение сил и давления на культю ампутированного человека с помощью роликового сустава стопы. Биомеханика. 1999: 315–318. [Google Scholar]
Биомеханика. 1999: 315–318. [Google Scholar]
[25] Питкин М., Щербина К., Смирнова Л., Сусляев В., Звонарева Е., Курдибайло С. Хоккей с ампутированными конечностями: биомеханические оценки, проблемы и паралимпийские перспективы. Ортопедия-Техник. 2006; 1:1–6. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Биомеханическая и клиническая оценка недавно разработанного полицентрического колена трансфеморального протеза
Биомеханическая и клиническая оценка недавно разработанного полицентрического коленного трансфеморального протеза
Кадзутоши Йокогуши, доктор философии; Хироши Нарита, доктор философии; Эйити Учияма, доктор философии; Сусуму Чиба, доктор философии;
Тошия Носака, доктор философии; Кен-ити Ямакоши, профессор, доктор философии
Отделение реабилитации, Больница Медицинского университета Саппоро, Саппоро, Япония; Кафедра неврологии Медицинского университета Саппоро, Саппоро, Япония; Высшая школа естественных наук и технологий Канадзавского университета,
Исикава, Япония
Abstract — Мы разработали новое полицентрическое колено с гидравлическим блоком и интеллектуальным механизмом. Биомеханические параметры этого прототипа, такие как продолжительность стойки, максимальный угол сгибания колена в стойке и махе, максимальный угол сгибания бедра и пиковые моменты разгибания бедра, были проанализированы в трех различных каденциях (88, 9).6, 104 шага/мин) у трех человек с ампутированными конечностями, а затем сравнили с таковыми у полицентрических гидравлических коленей, используемых в настоящее время. Те же параметры были также измерены для 10 здоровых добровольцев и впоследствии проанализированы. В прототипе почти все значения параметров не показали существенного различия у людей при разных каденциях. Такая же ситуация была и у здоровых добровольцев. Однако значения параметра для обычного колена значительно различались у разных людей при разных частотах вращения педалей. Прототип может иметь практическое применение, способствуя стабильной ходьбе даже при разных частотах вращения педалей.
Биомеханические параметры этого прототипа, такие как продолжительность стойки, максимальный угол сгибания колена в стойке и махе, максимальный угол сгибания бедра и пиковые моменты разгибания бедра, были проанализированы в трех различных каденциях (88, 9).6, 104 шага/мин) у трех человек с ампутированными конечностями, а затем сравнили с таковыми у полицентрических гидравлических коленей, используемых в настоящее время. Те же параметры были также измерены для 10 здоровых добровольцев и впоследствии проанализированы. В прототипе почти все значения параметров не показали существенного различия у людей при разных каденциях. Такая же ситуация была и у здоровых добровольцев. Однако значения параметра для обычного колена значительно различались у разных людей при разных частотах вращения педалей. Прототип может иметь практическое применение, способствуя стабильной ходьбе даже при разных частотах вращения педалей.
Ключевые слова: биомеханика, гидравлика, коленный сустав, пневматический, полицентрический, прототип, трансфеморальный протез.
Аббревиатура: EBS = эргономически сбалансированный шаг.
Этот материал был основан на работе, поддерживаемой государственной субсидией для поддержки научных исследований в Японии (№ 0857086).
Всю корреспонденцию адресовать Йокогуши К., к.т.н., доценту; Отделение реабилитации, Больница Медицинского университета Саппоро, Minami-1 Nishi-16, Саппоро, Япония 0608543; 81-11-611-2111; факс: 81-11-618-5220; электронная почта: [email protected].
DOI: 10.1682/JRRD.2003.05.0076
ВВЕДЕНИЕ
Потеря ноги — одна из самых трудных вещей, с которой приходится справляться, и каждый человек с ампутацией ожидает идеального протеза, который позволит ему или ей ходить так же, как он или она ходили до потери конечности. Колени трансфеморальных протезов, используемых в настоящее время, содержат превосходные механизмы контроля, которые работают либо во время фазы опоры, либо во время фазы поворота, либо в обоих случаях, позволяя людям с ампутированными конечностями ходить естественно и сохранять равновесие, адаптируясь к различным дорожным условиям [1].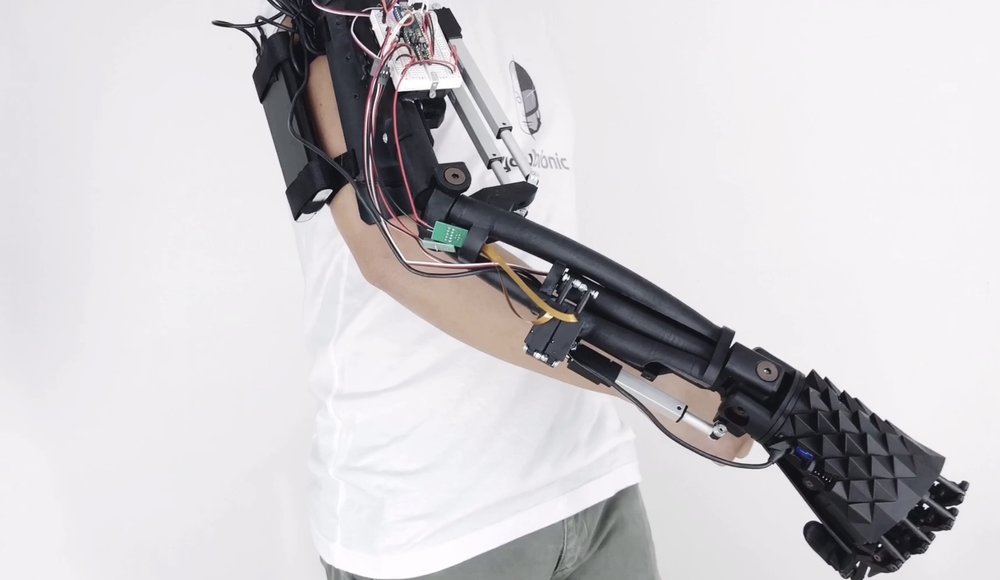 Среди них теперь доступны протезы с компьютерным управлением, которые в значительной степени способствуют улучшению жизни людей с ампутированными конечностями. C-Leg (Otto Bock Orthopedic Industry, Inc., Миннеаполис, Миннесота) является одним из них [2]. В средствах массовой информации существует много рекламы этой новой модели, но в литературе мало информации о ее клинических и биомеханических данных [3-7].
Среди них теперь доступны протезы с компьютерным управлением, которые в значительной степени способствуют улучшению жизни людей с ампутированными конечностями. C-Leg (Otto Bock Orthopedic Industry, Inc., Миннеаполис, Миннесота) является одним из них [2]. В средствах массовой информации существует много рекламы этой новой модели, но в литературе мало информации о ее клинических и биомеханических данных [3-7].
Мы разработали новое полицентрическое колено для экспериментального использования, которое может обеспечить стабильное сгибание колена в положении стоя и легкое качание, соответствующее изменению скорости ходьбы. Прототип имеет 4-рычажную связь с парой промежуточных звеньев, гидравлический блок, работающий во время фазы опоры, и пневматический блок, управляемый микропроцессором, работающий во время фазы переноса (интеллектуальное колено). В этом исследовании сравнивались биомеханические параметры ходьбы у людей с трансфеморальной ампутацией при различных частотах вращения и у здоровых добровольцев, а также изучались функциональные характеристики и субъективная оценка прототипа по сравнению с протезами коленного сустава, используемыми в настоящее время.
МЕТОДЫ
Предметы
В исследовании приняли участие трое пациентов с односторонней трансфеморальной ампутацией, пользующихся протезами более 3 лет. Все испытуемые были мужчинами с ампутациями на уровне середины бедра, ампутации которых были вызваны травмой. Сторона ампутированной ноги была правая в двух и левая в одной. Средний возраст, масса тела и рост составили 28,0 ± 1,5 года, 61,0 ± 9,0 кг и 172,0 ± 1,5 см соответственно. Десять здоровых добровольцев мужского пола участвовали в сборе нормальных биомеханических данных для сравнения с таковыми у людей с ампутированными конечностями. Их средний возраст, масса тела и рост составили 22,0 ± 1,5 года, 71,0 ± 8,9 года.кг и 175,0 5,8 см соответственно.
Полицентрическое колено новой конструкции
Прототип имеет полицентрический коленный шарнир и два разных блока управления (рис. 1 и 2). Один представляет собой гидравлический блок (A2M20, Taiyo-Tekko Ltd., Осака, Япония), используемый во время сгибательной стойки с активацией веса, а другой — пневматический блок, управляемый микропроцессором (TC32X48RC, Nabco Ltd. , Кобе, Япония), позволяющий легкие качели, реагирующие на разную скорость ходьбы [8]. Полицентрическое колено состоит из 4-звенного рычажного механизма с парой промежуточных звеньев. Промежуточные звенья удерживают колено в фиксированном положении и предотвращают сгибание колена. Гидравлический блок поддерживает нагрузку, передаваемую через колено, и позволяет сгибать колено в положении стоя, чтобы помочь принять вес. Когда нагрузка начинает уменьшаться в начале второй двухплечевой опоры, промежуточные звенья больше не блокируются на стопорах. Затем звенья переводят колено в положение блокировки и позволяют колену еще больше согнуться и подготовиться к замаху (рис. 3). Пневматический блок, управляемый микропроцессором, обеспечивает легкое качание в зависимости от скорости ходьбы. Базовая конструкция и производительность перечислены в таблице 1.
, Кобе, Япония), позволяющий легкие качели, реагирующие на разную скорость ходьбы [8]. Полицентрическое колено состоит из 4-звенного рычажного механизма с парой промежуточных звеньев. Промежуточные звенья удерживают колено в фиксированном положении и предотвращают сгибание колена. Гидравлический блок поддерживает нагрузку, передаваемую через колено, и позволяет сгибать колено в положении стоя, чтобы помочь принять вес. Когда нагрузка начинает уменьшаться в начале второй двухплечевой опоры, промежуточные звенья больше не блокируются на стопорах. Затем звенья переводят колено в положение блокировки и позволяют колену еще больше согнуться и подготовиться к замаху (рис. 3). Пневматический блок, управляемый микропроцессором, обеспечивает легкое качание в зависимости от скорости ходьбы. Базовая конструкция и производительность перечислены в таблице 1.
Рис. 1.
Обзор прототипа: (а) вид спереди и (б) вид сбоку.
 Гидроблок встроенный, пневмоблок встроенный.
Гидроблок встроенный, пневмоблок встроенный.Рис. 2.
Схема базовой конструкции прототипа: (а) 4-звенная связь (AB, BC, CD и ADD1) с парой промежуточных звеньев (EF, D1E) и тремя стопорами, установленными рядом со звеньями. Звено БК фиксируется к бедру. Один конец промежуточных звеньев соединяется с звеном AB в точке F, а другой конец соединяется с хвостовиком в точке D1. (b) Гидравлический блок работает во время фазы опоры для создания согнутой опоры, активируемой весом. (c) Пневматический блок с микропроцессорным управлением работает во время фазы качания, обеспечивая легкое качание в ответ на разные скорости ходьбы.
«>
Таблица 1.
Базовый проект прототипа и 3Р60.
Имущество
Прототип
Вес (кг)
Максимальное сгибание колена в стойке*
Максимальное сгибание колена*
Контроль стойки
Гидравлический блок
Резиновый бампер
Управление качанием
Пневматический блок*
Гидравлический блок
*Управляется микропроцессором
Экспериментальная установка
Перед сеансом тестирования испытуемые и здоровые добровольцы читают и подписывают
информированное согласие в соответствии с нашими институциональными рекомендациями. 3R60
3R60
(Otto Bock Orthopedic Industry, Inc., Миннеаполис, Миннесота) была выбрана для сравнения
с прототипом в этом исследовании, потому что это полицентрическое гидравлическое колено
с эргономически сбалансированным шагом (EBS), широко используемым в умеренно активных
взрослые [9] и потому, что все испытуемые в настоящее время его использовали.
Они попеременно носили тестовые протезы или идентичную седалищно-рамальную защитную оболочку.
розетка и ножка для хранения энергии. Тестовые протезы были подогнаны и выровнены.
собственно одним из авторов (Nosaka T, CPO, PhD), опытным протезистом.
Испытуемые тренировались в помещении в течение 30 минут, чтобы ознакомиться с
пробный протез. Им было приказано идти по платформе, содержащей
две силовые пластины (9286A, Kistler Instrument Corp., Amherst, NY) на расстоянии 40 см друг от друга.
в столбце. Анализ походки проводился более трех раз по каждому испытуемому.
и здоровые добровольцы в трех различных каденциях (88, 96, 104 шага/мин),
отсчет времени с помощью электрического метронома. Каждая силовая пластина записывала землю
Каждая силовая пластина записывала землю
сила реакции четвертой и пятой ступеней протеза. Кинематические данные были
собранные с помощью 3-D (трехмерного) анализатора движения (VICON140, Oxford
Metrix Ltd., Лондон, Великобритания) с блоком из четырех камер, окружающим платформу.
Инфракрасные светоизлучающие диоды-маркеры прочно закреплялись на коже над
обе стороны от акромиона, большой вертел бедра, латеральный мыщелок
коленный сустав, малоберцовая лодыжка и проксимальное основание пятого
метаталус. Маркеры фиксировали на соответствующих участках скелета
тестовый протез так же, как и здоровая конечность. Силовая пластина и
3-D кинематические данные были преобразованы одновременно и записаны как цифровые данные.
на персональном компьютере (Gateway Performance 700, Gateway Companies, Inc., Poway,
КА). Частота дискретизации 60 Гц, частота среза 6 Гц. Соединение
углы и моменты рассчитывались по методике, описанной Винтером
и другие. [10,11].
Это исследование было сосредоточено на том, как биомеханические данные протезной походки менялись с изменением скорости. Оптимальная скорость ходьбы на открытом воздухе для испытуемых варьировалась от 90 до 100 шагов, поэтому были выбраны три разных частоты шагов (88, 96, 104 шага/мин).
Оптимальная скорость ходьбы на открытом воздухе для испытуемых варьировалась от 90 до 100 шагов, поэтому были выбраны три разных частоты шагов (88, 96, 104 шага/мин).
Анализ данных
Стойка для сравнения длительности, максимальный угол сгибания колена в ранней стойке и во время фазы переноса, максимальный угол сгибания бедра и пиковый момент разгибания бедра измерялись для двух протезов коленей при разных частотах вращения педалей. Мы проанализировали данные с помощью программного обеспечения для статистического анализа теста Kruskal Wallis (SPSS, 7.5J для Windows). Значение p <0,05 считалось значимым.
ПОЛУЧЕННЫЕ РЕЗУЛЬТАТЫ
Биомеханические параметры здоровых добровольцев
Продолжительность стойки, максимальный угол сгибания колена в начальной стойке и во время фазы переноса, а также максимальный угол сгибания бедра у здоровых добровольцев не показали значительных вариаций значений при разных каденциях. С другой стороны, пиковый момент разгибания бедра увеличивался в соответствии с увеличением частоты педалирования (таблица 2).
Таблица 2.
Биомеханические параметры здоровых добровольцев.
Параметр
Каденс 88
(среднее стандартное отклонение)
Каденс 96
(среднее стандартное отклонение)
Каденс 104
(среднее стандартное отклонение)
с 2
ЗначениеДлительность стойки (%)
62,2 0,8
62,8 0,8
63,9 1,1
Пиковый угол сгибания колена в начальной стойке*
12,0 3,5
14,5 2,6
15,2 4,8
Максимальный угол сгибания колена во время маха*
63,6 4,5
64,1 3,4
62,1 2,8
Пиковый угол сгибания бедра*
24,0 3,2
25,1 3,7
24,0 4,8
Пиковый момент разгибания бедра (Н/м)
4,1 0,7
5,4 1,0
5,8 1,2
*Однофакторный дисперсионный анализ, p < 0,05
SD = стандартное отклонение
Биомеханические параметры для людей с ампутированными конечностями
Значения биомеханических параметров у трансфеморальных ампутантов отличались от таковых у здоровых добровольцев. Продолжительность стойки, пиковый угол сгибания колена в начальной стойке и во время фазы переноса, а также пиковый угол сгибания бедра, как правило, были меньше, чем у здоровых добровольцев. Пиковые моменты разгибания бедра у людей с ампутированными конечностями были больше, чем у здоровых добровольцев (таблицы 2, 3 и 4).
Продолжительность стойки, пиковый угол сгибания колена в начальной стойке и во время фазы переноса, а также пиковый угол сгибания бедра, как правило, были меньше, чем у здоровых добровольцев. Пиковые моменты разгибания бедра у людей с ампутированными конечностями были больше, чем у здоровых добровольцев (таблицы 2, 3 и 4).
Прототип
Сравнивая данные для человека при разных частотах вращения педалей, почти все параметры не показали существенного отклонения от значений в прототипе. Только в одном случае (субъект С) было продемонстрировано статистически значимое изменение максимального угла сгибания колена во время фазы переноса. Один из трех субъектов (субъект B) показал разницу в пиковом моменте разгибания бедра при разных каденциях (таблица 3).
Таблица 3.
Биомеханические параметры для ампутантов с использованием прототипа.
Параметр
Предмет
Каденс 88
(среднее стандартное отклонение)
Каденс 96
(среднее стандартное отклонение)
Каденс 104
(среднее стандартное отклонение)
F-значение
Длительность стойки (%)
57,2 0,8
56,0 1,0
54,7 0,8
60,3 0,6
60,7 0,6
60,2 0,8
60,0 1,0
62,0 1,0
59,0 1,0
Пиковый угол сгибания колена в начальной стойке*
3,2 0,4
3,3 0,4
3,4 0,5
4,2 0,4
5,0 0,4
4,6 0,6
10,1 0,6
9,1 0,5
9,6 0,6
Максимальный угол сгибания колена во время маха*
45,0 2,5
46,0 2,7
47,9 3,5
60,0 3,5
58,3 3,4
60,4 3,6
41,5 3,7
52,4 3,6
44,6 4,3
Пиковый угол сгибания бедра*
20,3 2,7
19,3 2,6
20,1 2,7
18,1 3,2
23,7 3,1
22,0 3,6
19,3 3,4
21,7 2,7
20,7 3,2
Пиковый момент разгибания бедра (Н/м)
39,3 8,5
37,1 8,6
39,5 8,2
17,7 7,5
26,0 6,8
37,5 8,4
40,6 7,6
47,0 8,5
51,3 9,5
*Двухфакторный дисперсионный анализ, p < 0,05
SD = стандартное отклонение

3R60
Все параметры при разных каденциях показали статистически значимую вариацию значений по крайней мере у одного из трех субъектов (таблица 4).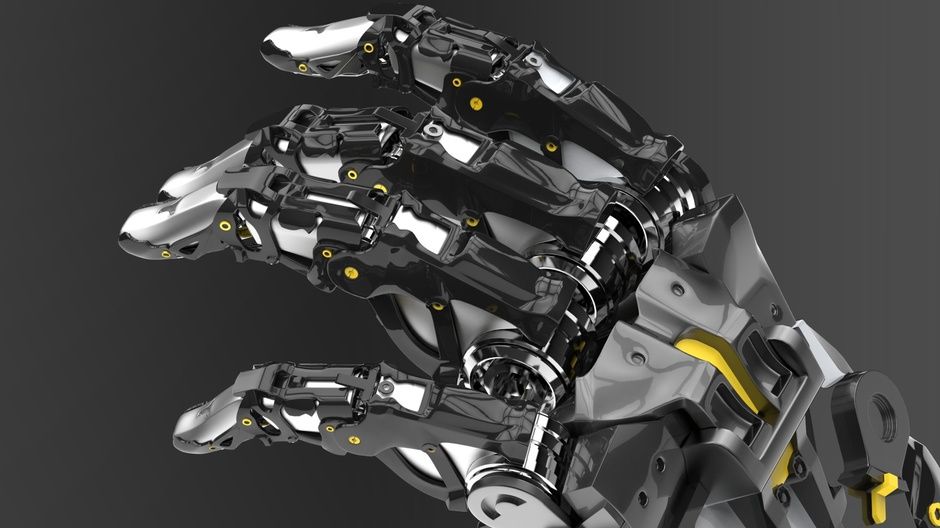
Таблица 4.
Биомеханические параметры для людей с ампутированными конечностями с использованием 3R60.
Параметр
Предмет
Каденс 88
(среднее стандартное отклонение)
Каденс 96
(среднее стандартное отклонение)
Каденс 104
(среднее стандартное отклонение)
F-значение
Длительность стойки (%)
59,3 0,6
59,3 0,6
59,0 1,0
68,0 3,3
63,0 0,5
62,0 1,0
60,7 1,5
53,0 1,0
54,0 1,0
Пиковый угол сгибания колена в начальной стойке*
6,2 0,5
5,7 0,6
6,1 0,8
3,6 0,6
3,9 0,6
5,7 0,7
10,35*
10,4 0,5
10,1 0,5
11,1 0,7
Максимальный угол сгибания колена во время маха*
32,6 4,2
40,7 3,5
45,7 4,2
53,4 3,9
68,1 3,7
70,5 4,8
53,8 4,8
74,7 4,7
80,8 5,2
Пиковый угол сгибания бедра*
22,3 3,2
24,7 3,6
31,5 3,7
21,0 3,1
21,6 3,5
21,3 3,3
29,9 3,6
29,5 3,2
38,8 4,2
Пиковый момент разгибания бедра (Н/м)
40,8 7,5
34,6 9,5
55,7 10,5
22,9 6,8
24,2 8,6
39,2 9,7
36,8 11,4
69,2 13,5
56,2 10,5
*Двухфакторный дисперсионный анализ, p < 0,05
р < 0,01
SD = стандартное отклонение
Субъективная оценка двух разных коленей
Все испытуемые отметили повышенную устойчивость и легкость раскачивания прототипа.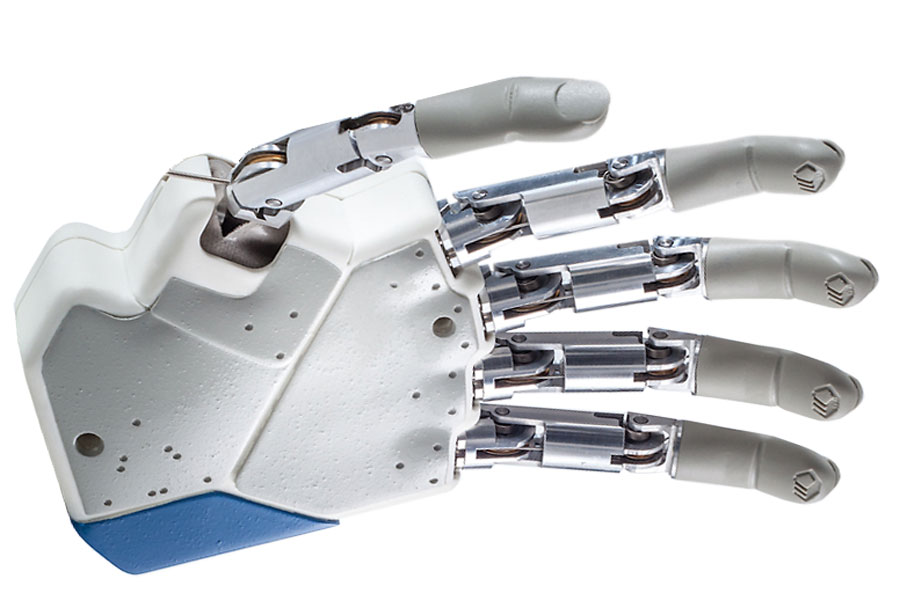 Они также посчитали, что вес прототипа был легче, чем у 3R60, несмотря на то, что прототип был тяжелее на 0,24 кг. Все испытуемые чувствовали себя некомфортно при медленном каденсе и ненадежном сопротивлении при быстром каденсе во время фазы переноса в 3R60. Один из них (субъект Б) выразил обеспокоенность по поводу возможного коллапса колена во время фазы опоры при медленном каденсе в 3R60.
Они также посчитали, что вес прототипа был легче, чем у 3R60, несмотря на то, что прототип был тяжелее на 0,24 кг. Все испытуемые чувствовали себя некомфортно при медленном каденсе и ненадежном сопротивлении при быстром каденсе во время фазы переноса в 3R60. Один из них (субъект Б) выразил обеспокоенность по поводу возможного коллапса колена во время фазы опоры при медленном каденсе в 3R60.
ОБСУЖДЕНИЕ
Ритмическая стадия ходьбы человека и закономерности движений тела во время свободной скоростной ходьбы удивительно согласуются между людьми. Средний цикл ходьбы состоит из 62% фазы опоры и 38% фазы переноса. Мышцы ног работают четко и организованно, чтобы поддерживать постоянный цикл ходьбы, вызывая правильные изменения моментов в суставах [12-14]. В этом исследовании продолжительность стойки, максимальный угол сгибания колена в ранней стойке и во время фазы переноса, а также максимальный угол сгибания бедра у здоровых добровольцев не показали существенных изменений при разных частотах вращения педалей.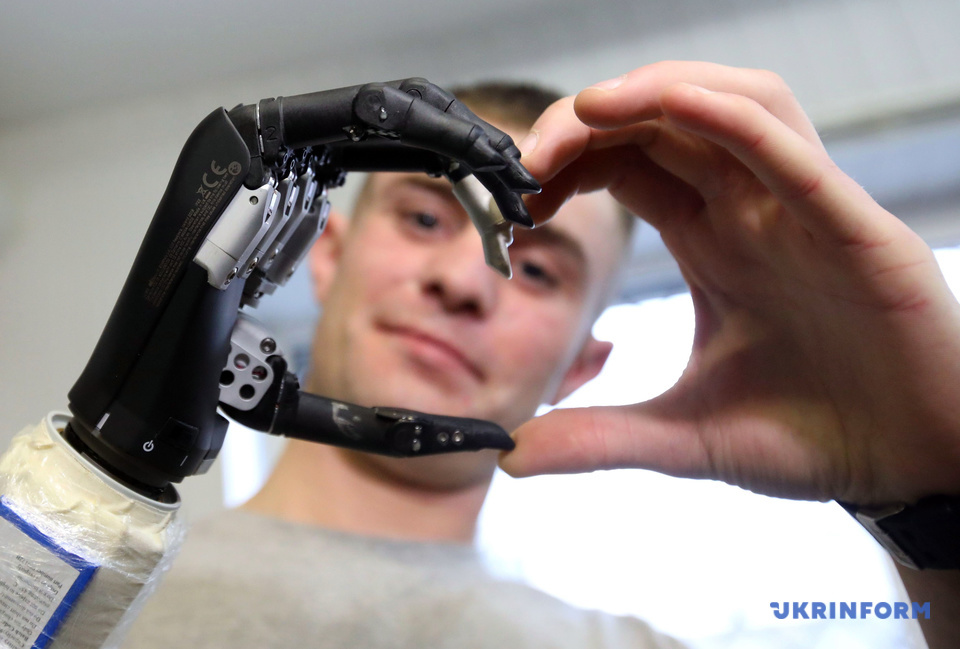 С другой стороны, пиковый момент разгибания бедра увеличивался в соответствии с увеличением частоты педалирования. Это ожидаемый результат, который не противоречит предыдущему отчету [12-15].
С другой стороны, пиковый момент разгибания бедра увеличивался в соответствии с увеличением частоты педалирования. Это ожидаемый результат, который не противоречит предыдущему отчету [12-15].
Когда люди с трансфеморальной ампутацией ходят с разной скоростью, им приходится компенсировать маятникообразное действие протеза, изменяя длину шага или скорость шага, наклоняя таз или используя другие маневры, что приводит к ненормальной походке и требует дополнительной концентрации внимания и физической активности. усилия [14]. Из-за отсутствия большинства функций мышц ног значения биомеханических параметров у трансфеморальных ампутантов, как и предполагалось, отличались от таковых у здоровых добровольцев.
Трансфеморальные протезы работают лучше всего, помогая людям с ампутированными конечностями поддерживать цикл ходьбы в диапазоне нормальной скорости ходьбы. Эта проблема была решена и развита в различных коленных механизмах с помощью гидравлического или пневматического узла, встроенного в полицентрические коленные суставы. Среди них 3R60 — уникальное полицентрическое колено с геометрической фиксацией с помощью рычажного механизма с 5 звеньями. Это модульное колено предлагает EBS с резиновым амортизатором, который способствует созданию стабильной позиции сгибания и обеспечивает автоматическое управление поворотом с помощью гидравлического блока [9].]. В этом исследовании биомеханическая оценка была сосредоточена на функциональных характеристиках двух разных коленных суставов в поддержании постоянства цикла протезной ходьбы при разных частотах вращения. Сравнение данных для людей при разных каденциях с использованием прототипа не показало существенной вариации значений почти всех параметров. Аналогичные результаты продемонстрировали и здоровые добровольцы. Наоборот, все параметры показали статистически значимые различия в значениях для людей при разных частотах вращения педалей в 3R60.
Среди них 3R60 — уникальное полицентрическое колено с геометрической фиксацией с помощью рычажного механизма с 5 звеньями. Это модульное колено предлагает EBS с резиновым амортизатором, который способствует созданию стабильной позиции сгибания и обеспечивает автоматическое управление поворотом с помощью гидравлического блока [9].]. В этом исследовании биомеханическая оценка была сосредоточена на функциональных характеристиках двух разных коленных суставов в поддержании постоянства цикла протезной ходьбы при разных частотах вращения. Сравнение данных для людей при разных каденциях с использованием прототипа не показало существенной вариации значений почти всех параметров. Аналогичные результаты продемонстрировали и здоровые добровольцы. Наоборот, все параметры показали статистически значимые различия в значениях для людей при разных частотах вращения педалей в 3R60.
В прототипе использовалась 4-звенная навеска с парой промежуточных звеньев, гидроблок и пневматический блок, управляемый микропроцессором. Связь с гидравлическим блоком, который работал во время фазы опоры, могла производить точное движение мгновенного центра вращения колена, а затем обеспечивать стабильную и удобную стойку сгибания до 11,2. Пневматический блок, управляемый микропроцессором, известный как «интеллектуальное колено», может автоматически изменять уровень разгибания колена в соответствии со скоростью ходьбы. Люди с ампутированными конечностями почувствовали улучшения в ходьбе с разной скоростью, большей ходьбе и снижении потребления энергии [3-7] с прототипом. Биомеханические результаты в этом исследовании показывают, что прототип может обеспечить удобную ходьбу и снять компенсационное бремя даже при разных частотах вращения педалей. Восприятие испытуемыми прототипа в целом также было благоприятным.
Связь с гидравлическим блоком, который работал во время фазы опоры, могла производить точное движение мгновенного центра вращения колена, а затем обеспечивать стабильную и удобную стойку сгибания до 11,2. Пневматический блок, управляемый микропроцессором, известный как «интеллектуальное колено», может автоматически изменять уровень разгибания колена в соответствии со скоростью ходьбы. Люди с ампутированными конечностями почувствовали улучшения в ходьбе с разной скоростью, большей ходьбе и снижении потребления энергии [3-7] с прототипом. Биомеханические результаты в этом исследовании показывают, что прототип может обеспечить удобную ходьбу и снять компенсационное бремя даже при разных частотах вращения педалей. Восприятие испытуемыми прототипа в целом также было благоприятным.
Необходимы дополнительные исследования по сбору данных в различных условиях, чтобы выяснить, как этот прототип может помочь людям с ампутированными конечностями, которые не удовлетворены обычными протезами. Одним из слабых мест этого исследования является то, что субъекты, включенные в него, были здоровы и активны, поэтому результаты нельзя напрямую перенести на других людей с ампутированными конечностями. Кроме того, количество маркеров для анализа движения может быть слишком мало и, следовательно, исключить влияние движения туловища и таза на изменение стратегии ходьбы в зависимости от различных скоростей ходьбы. Однако представленные здесь данные могут служить объективной информацией о биомеханических исследованиях трансфеморальных протезов.
Одним из слабых мест этого исследования является то, что субъекты, включенные в него, были здоровы и активны, поэтому результаты нельзя напрямую перенести на других людей с ампутированными конечностями. Кроме того, количество маркеров для анализа движения может быть слишком мало и, следовательно, исключить влияние движения туловища и таза на изменение стратегии ходьбы в зависимости от различных скоростей ходьбы. Однако представленные здесь данные могут служить объективной информацией о биомеханических исследованиях трансфеморальных протезов.
ВЫВОД
Мы разработали новое полицентрическое колено для экспериментального использования. Прототип имеет гидравлический и пневматический блок с микропроцессорным управлением и 4-звенную навеску с промежуточными звеньями. Большинство значений параметров протезной ходьбы с прототипом не показали существенных различий у людей в разных ритмах, что также было продемонстрировано у здоровых добровольцев. Хотя прототип нуждается в дальнейшей доработке для практического использования, современные механические и микроэлектронные технологии могут решить эту практическую проблему и создать простой в эксплуатации протез для людей с ампутированными конечностями по разумной цене.
БЛАГОДАРНОСТИ
Мы хотели бы поблагодарить Масахико Окуда, доктора философии, и Ритуо Широиси, магистра, которые помогли в разработке и тестировании этого прототипа; и Ёсихиро Эхара, доктор философии, который помог в расчете углов и моментов суставов.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Г-н Х. Основные моменты презентации: Протезы и ортопедические конечности. J Rehabil Res Dev. 2002;39:11-12.
2. Майкл Дж.В. Современные протезы коленного сустава. Клин Ортоп. 1999;36:139-47.
3. Киркер С., Кеймер С., Талбот Дж., Лахманн С. Оценка интеллектуального коленного протеза. Клиника реабилитации. 1996; 10: 267-73.
4. Тейлор М.Б., Кларк Э., Оффорд Э.А., Бакстер С. Сравнение расхода энергии человеком с трансфеморальной ампутацией высокого уровня, использующим интеллектуальный протез и протезы конечностей с обычным демпфированием. Протез ортот инт. 1996; 20:116-21.
5. Бакли Дж. Г., Спенс В. Д., Соломонидис С. Э. Энергозатраты на ходьбу: сравнение «умного протеза» с обычным механизмом. Arch Phys Med Rehabil. 1997;78: 330-33.
Д., Соломонидис С. Э. Энергозатраты на ходьбу: сравнение «умного протеза» с обычным механизмом. Arch Phys Med Rehabil. 1997;78: 330-33.
6. Datta D, Howitt J. Обычная пневматическая регулировка фазы качания в сравнении с управляемой микрочипом для трансфеморальных ампутантов: вердикт пользователей. Протез ортот инт. 1998; 22:129-35.
7. Хеллер Б.В., Датта Д., Ховитт Дж. Пилотное исследование, сравнивающее когнитивные потребности при ходьбе у людей с трансфеморальной ампутацией с использованием интеллектуального протеза и при использовании коленей с обычным демпфированием. Клиника реабилитации. 2000;14:518-22.
8. Носака Т., Ямакоси К., Окуда М., Сираиси Н. Разработка нового протеза коленного сустава для трансфеморальных ампутантов и его оценка с помощью биомеханического анализа походки. Trans Japan Soc Mech Eng. 2002;68:213-20.
9. Блюментрит С., Шере Х.В., Веллерсхаус У., Майкл Дж.В. Принцип конструкции, биомеханические данные и клинический опыт применения полицентрического колена, обеспечивающего контролируемое сгибание колена в фазе опоры. Предварительный отчет. Джей Простет Орто. 1997;9:18-24.
Предварительный отчет. Джей Простет Орто. 1997;9:18-24.
10. Винтер Д.А., Куанбери А.О., Реймер Г.Д. Анализ мгновенной энергии нормальной походки. Дж. Биомех. 1976;9(4):253-57.
11. Винтер Д.А., Сидволл Х.Г., Хобсон Д.А. Измерение и снижение шума в кинематике локомоций. Дж. Биомех. 1974;7:157-59.
12. Гард С.А., Чайлдресс Д.С. От чего зависит вертикальное смещение тела при обычной ходьбе? Джей Простет Орто. 2001;13:64-67.
13. Сазерленд Д.Х., Кауфман К.Р., Мойтоза Дж.Р. Кинематика нормальной ходьбы человека. В: Роуз Дж., Гэмбл Дж. Г., редакторы. Ходьба человека. 2-е изд. Балтимор: Уильямс и Уилкинс; 1994. с. 23-44.
14. Рэдклифф CW. Протезирование. В: Роуз Дж., Гэмбл Дж. Г., редакторы. Ходьба человека. 2-е изд. Балтимор: Уильямс и Уилкинс; 1994. с. 167-99.
15. Джагер С.М., Арендзен Дж.Х., де Йонг Х.Дж. Протезная походка пациентов с односторонней трансфеморальной ампутацией: кинематическое исследование. Arch Phys Med Rehabil.