Содержание
Ученые разработали бионический протез человеческого уха
Ученые разработали бионический протез человеческого уха — Российская газета
Свежий номер
РГ-Неделя
Родина
Тематические приложения
Союз
Свежий номер
22.11.2022 12:39
Рубрика:
Общество
Алексей Трапезников (Пермь)
Группа специалистов Пермского национального исследовательского политехнического университета (ПНИПУ) совместно с коллегами из Пермского государственной медицинского университета (ПГМУ) и Московского государственного медико-стоматологического университета разработала бионический протез человеческого уха, который способен восстановить костную проводимость звука.
Об этом рассказали в пресс-службе ПНИПУ.
По словам ученых, для создания протеза разработчики свели в единую конструкцию непосредственно протез уха, фиксирующую систему, микрофон, блок обработки звука на базе специализированного цифрового сигнального процессора со встроенными аналого-цифровыми и цифроаналоговыми преобразователями, модуль радиоканала Bluetooth для беспроводного управления и приема внешних аудиосигналов, а также излучатель звуковых колебаний.
В настоящее время уже создан прототип протеза, проводятся его доклинические испытания, в ходе которых будет оценена его функциональная эффективность. Для этого был собран испытательный стенд, в котором в качестве имитатора головы человека используется полимерный резервуар кубической формы, полученный с помощью пластиковой 3D-печати. Передача звука в такой конструкции достаточно близка по характеристикам к костной ткани человека.
Поделиться:
НаукаПермьЗдоровьеВ регионах
23:18Культура
Елена Камбурова сыграла роль Арины Родионовны в музыкальном спектакле по произведениям Пушкина и Андерсена
23:09Культура
Крупнейшие концертные залы Москвы и Петербурга готовятся с размахом отпраздновать 90-летие Родиона Щедрина
23:03Культура
Павел Басинский стал лауреатом литературной премии «Большая книга» за «Подлинную историю Анны Карениной»
22:39Культура
«АукцЫон» даст концерты в Москве и Петербурге
22:29Спорт
В жарком Катаре многие болельщики жаловались. .. на холод. Но организаторы первенства планеты смогли оперативно решить этот вопрос
.. на холод. Но организаторы первенства планеты смогли оперативно решить этот вопрос
22:21Спорт
В регулярном чемпионате НХЛ вновь героем игрового дня стал капитан клуба «Вашингтон Кэпиталз» Александр Овечкин
22:16Культура
В Москве открывается новое концертное пространство
22:14Кинократия
Умер шансонье Саша Зелкин
22:03Кинократия
Еще восемь актеров присоединились ко второму сезону сериала «Властелин колец»
22:01Происшествия
ФСБ показала кадры с Виктором Бутом после его обмена
21:27Digital
Intel Core i9-13900KS будет способен работать на частоте 6 ГГц без разгона
21:24Культура
Режиссер «Питер ФМ» снимет полнометражный фильм о Малышариках
21:20Кинократия
Вышел трейлер фантастического хоррора про куклу-маньяка M3GAN
21:18Общество
Роскосмос разрабатывает двигатель, работающий на воде
21:15Власть
Банкирам запретят навязывать гражданам биометрию
21:09Кинократия
Сценарий уже готов: Джеки Чан анонсировал «Час пик 4»
Главное сегодня:
ТЕХБИОНИК | Участник проекта «Сколково»
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «БИОНИЧЕСКИЕ ТЕХНОЛОГИИ»
Биомедицина
О компании
Техбионик является одним из ведущих разработчиков высокотехнологичных и многофункциональных средств реабилитации. Компанией осуществляется полный цикл разработки, начиная с научных исследований и заканчивая коммерциализацией результатов. В частности разработана линейка бионических протезов верхних конечностей с микропроцессорным управлением SmartLi, особенностью которых является модульная конструкция, что позволяет обеспечить высокую степень унификации деталей и уменьшить затраты на подготовку производства и выпуск продукции. Линейка SmartLi включает в себя как протезы для различных уровней ампутации, так и для различного возраста, в том числе детские. В настоящее время компания приступила к продажам данных протезов.
Компанией осуществляется полный цикл разработки, начиная с научных исследований и заканчивая коммерциализацией результатов. В частности разработана линейка бионических протезов верхних конечностей с микропроцессорным управлением SmartLi, особенностью которых является модульная конструкция, что позволяет обеспечить высокую степень унификации деталей и уменьшить затраты на подготовку производства и выпуск продукции. Линейка SmartLi включает в себя как протезы для различных уровней ампутации, так и для различного возраста, в том числе детские. В настоящее время компания приступила к продажам данных протезов.
Совместно с ведущими научными центрами и компаниями Техбионик разработало тренажер-экзокисть, а также участвует в разработке роботизированных ортопедических аппаратов (легких экзоскелетов) для нижних и верхних конечностей.
В компании работают специалисты, имеющие научные степени и звания, а генеральный директор неоднократно становился победителем профильных конкурсов: Инженер года, премия В. А. Ревунова, премия Губернатора Новгородской области в номинации Молодой ученый-исследователь.
А. Ревунова, премия Губернатора Новгородской области в номинации Молодой ученый-исследователь.
Проектный менеджерЮлияЩеглова
Проектный менеджерЮлияЩеглова
Проекты
Бизнес-модель
Бизнес для Потребителя (B2C)Бизнес для Государства (B2G)Бизнес для Бизнеса для Потребителя (B2B2C)
Описание проекта
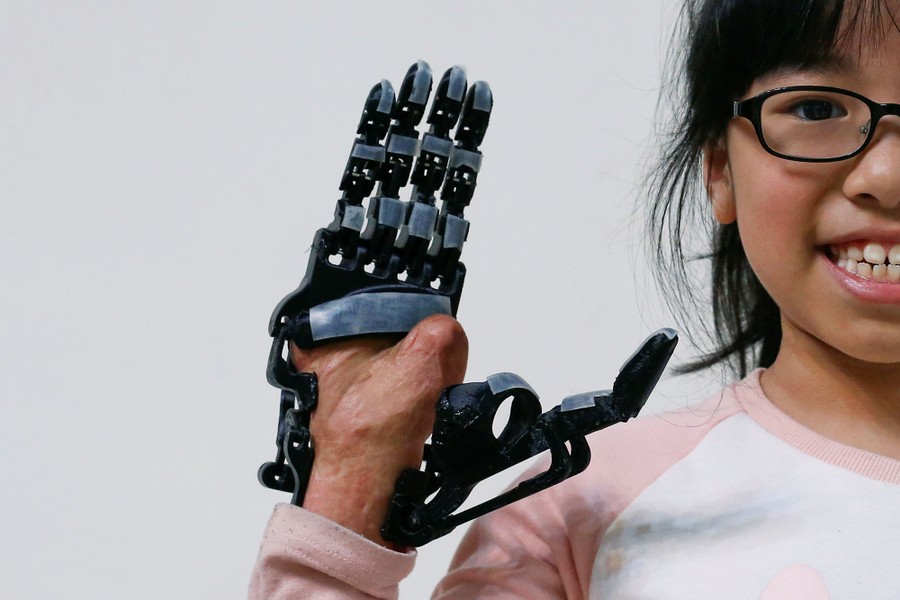
Представленные на рынке многофункциональные бионические протезы рук имеют достаточно высокую стоимость и зачастую не доступны для отечественных потребителей. Кроме того, продуктовые линейки производителей протезов редко включают в себя решения для протезирования детей младшего школьного и подросткового возраста, для протезирования кисти.
Проект направлен на разработку и организацию производства доступных и высокотехнологичных модульных бионических протезов рук, управляемых биоэлектрическими сигналами мышц.
Модульная конструкция обеспечивает возможности изготовления протезов для детей школьного возраста и взрослых при различных случаях ампутаций или врождённых аномалий верхних конечностей, позволяет реализовывать несколько переназначаемых шаблонов схватов, снижает стоимость, сроки изготовления и ремонта протезов.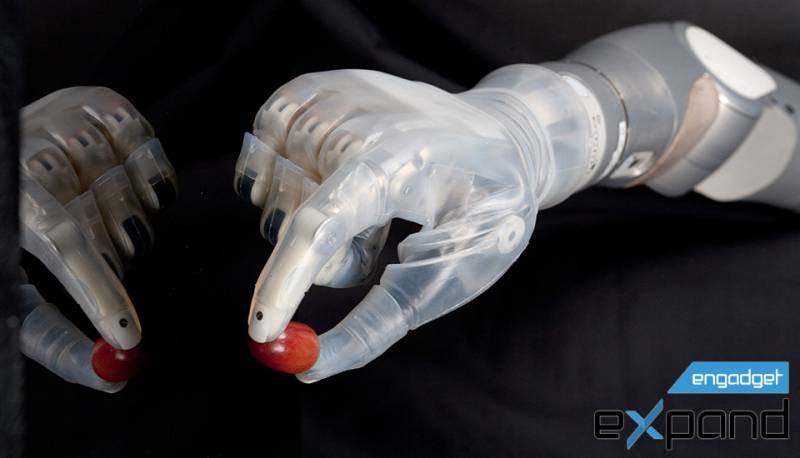
Для решения производственных и бытовых задач, имеются рабочие версий протезов, оснащенных набором быстросъемных губок и насадок.
Наличие сенсорной системы обратной связи и тактильного виброотклика повышает качество взаимодействия пользователя с протезом.
Кроссплатформенное мобильное приложение позволяет производить детальную настройку функций протеза, проводить активную двигательную реабилитацию с использованием дополнительного игрового ПО для персонального компьютера.
Финансовая поддержка
Компания поддержана институтами развития:
ФОНД «СКОЛКОВО»
5 000 000 ₽
Руководитель
МУРАВЬЁВСТАНИСЛАВАЛЕКСАНДРОВИЧ
Генеральный директор
Маркетинговые материалы
Презентации
1640281165_Презентация1207211
Фотографии
Интеллектуальная собственность
| 2021 год | |
Промышленный образец 126473 ПРОТЕЗ РУКИ SMARTLI | |
| 2020 год | |
Полезная модель 196466 МОДУЛЬ ПЕРЕКЛЮЧЕНИЯ СХВАТОВ ФУНКЦИОНАЛЬНОГО ПРОТЕЗА | |
Свидетельство о государственной регистрации программы для ЭВМ 2020663114 ПРОГРАММА УПРАВЛЕНИЯ НЕЙРОМОДУЛЕМ РОБОТИЗИРОВАННОГО ОРТЕЗА | |
| 2019 год | |
Полезная модель 192333 МОДУЛЬНЫЙ БИОНИЧЕСКИЙ ПРОТЕЗ РУКИ | |
Свидетельство о государственной регистрации программы для ЭВМ 2019611329 ПРИЛОЖЕНИЕ «SMARTLI CONTROL» ДЛЯ НАСТРОЙКИ БИОНИЧЕСКОГО ПРОТЕЗА | |
Свидетельство о государственной регистрации программы для ЭВМ 2019611175 ПРОГРАММА УПРАВЛЕНИЯ МОДУЛЬНЫМ БИОНИЧЕСКИМ ПРОТЕЗОМ | |
Товарный знак, знак обслуживания 738502 ТОВАРНЫЙ ЗНАК, ЗНАК ОБСЛУЖИВАНИЯ | |
| 2018 год | |
Полезная модель 176303 БИОНИЧЕСКИЙ ПРОТЕЗ КИСТИ РУКИ | |
События
2020 год
Участник конкурса
SBazaar2020
Участник мероприятия
Форум «Открытые Инновации 2020»
2019 год
Участник мероприятия
Форум «Открытые инновации 2019»
Участник конкурса
PatentsPower 2019
Участник мероприятия
Startup Village 2019
Упоминание в СМИ
http://techbionic. com
com
Официальный сайт
14.11.2022sk.ru
Власти Северной столицы отметили технические средства реабилитации Новгородской компании «Техбионик».
21.09.2022sk.ru
Ростех показал на форуме «Биотехмед» роботизированные протезы
05.03.2021sk.ru
Масштабная апробация отечественных модульных бионических протезов «SmartLi» для людей с частичной ампутацией кисти руки завершена
26.02.2021sk.ru
Уникальный модульный биопротез КРЭТ успешно прошел испытания
05.10.2020sk.ru
«Техбионик» начнет серийное производство модульных протезов на мощностях предприятия «Ростеха»
Информация о компании
Учредители
МУРАВЬЁВ СТАНИСЛАВ АЛЕКСАНДРОВИЧ
100%
Уставный капитал
10 000 ₽
173016, Новгородская область, Г.О. ВЕЛИКИЙ НОВГОРОД, Г ВЕЛИКИЙ НОВГОРОД, УЛ КОСМОНАВТОВ, Д. 22, КВ. 24
Похожие компании
Биомедицина
КЛАЙБЕР БИОНИКС
Бионический протез руки KleiberHand
Биомедицина
ИЦ МОТОРИКА
Роботизированные протез плеча с инерциальной системой управления
Биомедицина
НЕЙРОМЕХ
Универсальное программное обеспечение для управления мехатронными системами
Биомедицина
МИОЛИМБ
Протез кисти с блоком тактильной обратной связи
Биомедицина
МОТОРИКА СЕНС
Модуль чувствительности для протезов рук
Биомедицина
МАКСБИОНИК
МаксБионик
Биомедицина
МОТОРИКА
«Экспресс протезирование» («Express-Prosthesis»)
Биомедицина
ГРУППА КОМПАНИЙ САЛЮТ ОРТО
Проектирование и разработка инновационных коленных модулей для протезов ног
Биомедицина
СЕНСОМЕД
Программно-аппаратный комплекс Senso Rehab
Биомедицина
НИК МАТРИОН
Система экзопротезирования предплечья и кисти с биологической обратной связью посредством АСУ нейросетевой архитектуры
Биомедицина
МЕДИТРОНИКА ФУТ СИСТЕМС
Медитроника. Протезы стоп.
Протезы стоп.
Биомедицина
ИННОВАЦИЯ-Н
Трансформируемая инвалидная коляска с изменяемой базой и возможностью движения боком
Биомедицина
ВАЙБРЕЙНТ РУС
VIBRAINT RehUp: нейрореабилитационный тренажер на основе интерфейса мозг компьютер
Биомедицина
СЕНСОР-ТЕХ
Коммуникатор Альберт — приложение альтернативной коммуникации для детей и взрослых
Промтех
ОБРАЗОВАТЕЛЬНАЯ РОБОТОТЕХНИКА
Робототехника: Технология управления движениями и взаимодействием с объектом манипулирования при неудерживающем контакте и неполноприводной динамике системы
Биомедицина
КАРДИОТЕХНИКА
Разработка биоинжинирингового протеза клапана сердца для пожизненной имплантации
Биомедицина
ЭКЗОСИСТЕМЫ
«Активный экзоскелет промышленного применения»
МАНДАРИНЛАБ
MandarinBank
Биомеханика в ортопедической реабилитации — Physiopedia
Оригинальный редактор — Грег Хэлфорд и Амаяк Тарахчян в рамках проекта Всемирной физиотерапевтической сети для реабилитации лиц с ампутированными конечностями
Лучшие участники — Admin , Sheik Abdul Khadir , Kim Jackson , Rachael Lowe , Tony Lowe , Evan Thomas , Aicha Benyaich , , Clare Knott.
Содержание
- 1 Введение
- 2 силы
- 3 Центр масс
- 4 Силы наземного реагирования
- 5 моментов или крутящих моментов
- 6 Осевая нагрузка протеза
- 7 Муфта для протеза
- 8 Резюме
- 9 Ресурсы
- 10 Каталожные номера
Понимание биомеханики важно при работе с людьми с ампутированными конечностями и людьми с протезами конечностей. Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Сила — это любое взаимодействие, которое стремится изменить движение объекта [1] . Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Давление равно силе на площади (P=F/A)
Когда площадь, по которой распределяется сила, увеличивается, давление снижается. Если кто-то наступает вам на ногу в шпильке (женская обувь на высоком каблуке с тонким краем), возникает сильное давление (и боль).
Тот же человек, стоящий на вашей ноге на каблуке большего размера, будет вызывать меньшее давление (и боль), потому что площадь больше. Тот факт, что это один и тот же человек, означает, что Сила в этом сценарии постоянна.
Каблук туфли на шпильке будет создавать большое давление на единицу площади. При увеличении площади (на рисунке справа) давление снижается.
В приведенном ниже примере мы видим, что давление также уменьшилось за счет демонстрации эффекта увеличения площади контакта под стопой.
В этом варианте классического сценария «ложе из гвоздей» мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Эта идея используется в конструкции гильзы протеза, чтобы попытаться распределить усилие по достаточно большой площади, чтобы снизить давление до приемлемого уровня.
Часто пациенты просят снять неудобную часть протеза. Иногда, когда это делается, площадь, на которую распространяется сила, уменьшается. Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Общий биомеханический принцип — это понимание центра масс [2] , иногда называемого центром тяжести. Это середина массы объекта, и можно предположить, что сила тяжести действует на объект из этой точки. Это также место, вокруг которого будут происходить вращения.
У человека с ампутированными конечностями в связи с удалением некоторой массы изменяется центр масс человека.
Сила реакции опоры (GRF) возникает при контакте с опорной поверхностью, она равна и противодействует силе, возникающей из-за прохождения массы тела через стопу на поверхность земли [3] .
Следует отметить, что «сила, обусловленная массой тела» включает в себя импульс и ускорение массы тела, а также только воздействие на нее силы тяжести. Следовательно, она отличается и в то же время похожа на весовую линию.
Выравнивание протеза изменяет походку, манипулируя положением нижней конечности и суставов протеза по отношению к силе реакции опоры (подробнее см. здесь).
GRF не используется клинически во многих местах из-за сложности его получения в режиме реального времени. Клиницисты могут попытаться понять движения, которые они видят, понимая, какое влияние GRF может оказывать на человеческое тело и протез.
Если Сила не воздействует непосредственно на COM объекта, она будет вращать объект. Если сила не действует через середину соединения с другим сегментом, она изменит угол соединения. В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
При нормальном движении человека момент, создаваемый внешней силой реакции опоры, уравновешивается (по большей части) внутренней мышечной силой, которая создает противодействующий момент.
Это общее правило не всегда верно на 100%, но является полезным приближением. В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В этом примере момент тыльного сгибания, создаваемый передней GRF, уравновешивается плантаторными сгибателями за счет напряжения ахиллова сухожилия. Эта мышца имеет фиксированное плечо рычага.
Эта мышца имеет фиксированное плечо рычага.
У людей с ампутациями отсутствует прямой мышечный контроль над некоторыми суставами.
У людей с ампутациями отсутствуют части тела, поэтому в некоторых случаях мышечная деятельность не может действовать в качестве противодействия GRF, поскольку мышцы и суставы больше не присутствуют. Если GRF проходит впереди лодыжки у человека с транстибиальной ампутацией, то лодыжка остается достаточно жесткой, чтобы сопротивляться деформации в тыльное сгибание. (Это не относится к механическим протезам стопы, таким как стопа Propio от Ossur).
В случае трансфеморальной ампутации со свободным коленом (без фиксирующего механизма) GRF следует размещать впереди колена на время поддержки одной конечности. Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
В этом сценарии человек с ампутацией продолжает косвенно контролировать колено, хотя и может разгибать тазобедренный сустав. Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Осевая нагрузка протеза[править | править исходный код]
В норме силы тела передаются от скелетной системы к земле через основание опоры, которое включает структуры подошвенной поверхности стопы (пяточная кость, латеральный продольный свод, плюсневые головки и пальцы). У человека с ампутированной нижней конечностью эта структура может отсутствовать. Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Осевая нагрузка достигается за счет обеспечения достаточной противодействующей силы для сопротивления действию силы тяжести. Эта сила должна быть распределена по участкам, устойчивым к давлению. Хорошее понимание этого необходимо для проектирования гильзы протеза.
Когда мы думаем о силах в протезе, гильза протеза обеспечивает среду для прохождения сил от:
- от земли до человека
И - от человека к земле.
Протезист оказывает давление на кожу, чтобы передать усилия от протеза на костную систему человека с ампутированной конечностью. Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Изменение положения конечности (на некоторое сгибание) может повлиять на доступную площадь для передачи вертикальной силы. Зеленая область под гнездами на рисунке ниже показывает доступную площадь для передачи вертикальной силы.
Чем больше сгибание, тем больше площадь становится доступной для передачи вертикальной силы.
Большее сгибание в суставе может иметь долгосрочные последствия для диапазона движений в суставе и должно тщательно рассматриваться как решение проблем с осевой нагрузкой.
Соединение между гильзой протеза и культей человека с ампутированной конечностью не является полностью жестким. Эту связь можно представить как нечто вроде соединения двух сегментов тела.
На этом снимке мы видим, что GRF человека с ампутацией не «толкает» протез прямо вверх. Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Этому крутящему моменту противодействует сжатие мягких тканей, другими словами, крутящий момент гильзы вызывает давление в определенных частях гильзы протеза предсказуемым образом. Проблемами давления в лунке всегда должен заниматься протезист, который понимает важность выравнивания. Слишком быстрый переход к переделке гнезда не всегда является хорошим решением в клинике. Изменения центровки обычно происходят быстро и легко обратимы с помощью современных компонентов.
К телу человека при протезировании прикладывают силы, это неизменно приводит к давлению. Давлением можно управлять, увеличивая площадь, на которую оно воздействует, и продуманно распределяя его на области, устойчивые к давлению. Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Протезист — ключевой специалист, которому поручено управление протезом и его воздействием на организм человека. Присутствие протезиста в составе междисциплинарной команды необходимо для успешной ортопедической реабилитации. Использование знаний биомеханики протезистом дает значительные возможности для оптимизации биомеханических условий для пользователя протеза.
Биомеханика протезирования нижних конечностей
Протезирование нижних конечностей: кинезиология и биомеханика
Нормальная человеческая локомоция, Часть 2: Движение, сила реакции опоры и мышечная активность
Силы наземного реагирования
Коленный направитель WestMARC для многопрофильной бригады протезистов
Учебники
- Левин Д., Ригардс Дж. и Уиттл М. В. Анализ походки Уиттла. 5-е издание Черчилль Ливингстон 2012 г.
- Киртли Дж. Клинический анализ походки: теория и практика. Черчилль Ливингстон 2006
- ↑ Force. Википедия.
 Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.
Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г. - ↑ Центр масс человека. Справочник по физике. http://hypertextbook.com/facts/2006/centerofmass.shtml, по состоянию на 8 марта 2015 г.
- ↑ Сила реакции земли. Бесплатный словарь http://medical-dictionary.thefreedictionary.com/ground+reaction+force, по состоянию на 8 марта 2015 г.
 Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.
Доступ по адресу http://en.wikipedia.org/wiki/Force, 8 марта 2015 г.Биомеханика в ортопедической реабилитации — Physiopedia
Первоначальный редактор — Грег Хэлфорд и Амаяк Тарахчян в рамках проекта Всемирной физиотерапевтической сети для реабилитации лиц с ампутированными конечностями
Лучшие участники — Admin , Sheik Abdul Khadir , Kim Jackson , Rachael Lowe , Tony Lowe , Evan Thomas , Aicha Benyaich , , Clare Knott.
Содержание
- 1 Введение
- 2 силы
- 3 Центр масс
- 4 Силы наземного реагирования
- 5 Моменты или крутящие моменты
- 6 Осевая нагрузка протеза
- 7 Муфта для протеза
- 8 Резюме
- 9 Ресурсы
- 10 Каталожные номера
Понимание биомеханики важно при работе с людьми с ампутированными конечностями и людьми с протезами конечностей. Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Это особенно важно для понимания того, как возникают отклонения походки и проблемы с давлением и как их можно исправить. Понимание биомеханики имеет важное значение для протезистов, поскольку оно влияет на многие аспекты их работы во время протезной реабилитации. Ниже приводится краткое введение в основы биомеханики протезирования нижних конечностей, которое может помочь людям, не являющимся протезистами, лучше понять эту область.
Сила — это любое взаимодействие, которое стремится изменить движение объекта [1] . Силы важны в протезах. Протез прикладывает силы к человеческому телу и может изменить способ взаимодействия сил с телом. Когда сила применяется к человеческому телу, это делается над участком кожи. Это производит давление со следующим уравнением.
Давление равно силе на площади (P=F/A)
Когда площадь, по которой распределяется сила, увеличивается, давление снижается. Если кто-то наступает вам на ногу в шпильке (женская обувь на высоком каблуке с тонким краем), возникает сильное давление (и боль).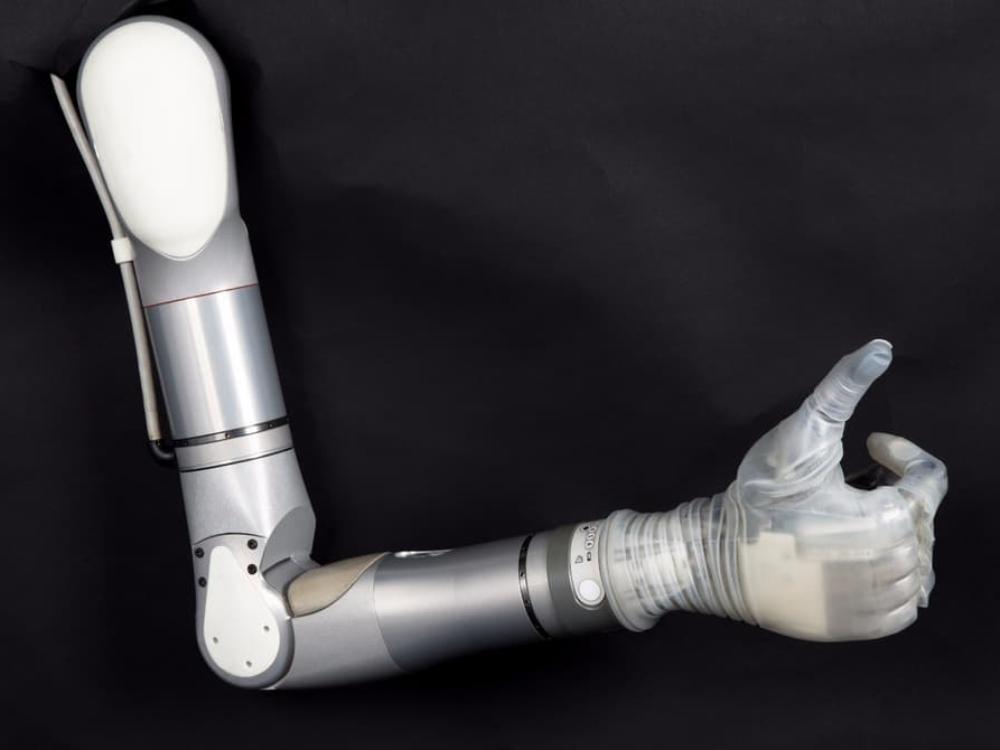
Тот же человек, стоящий на вашей ноге на каблуке большего размера, будет вызывать меньшее давление (и боль), потому что площадь больше. Тот факт, что это один и тот же человек, означает, что Сила в этом сценарии постоянна.
Каблук туфли на шпильке будет создавать большое давление на единицу площади. При увеличении площади (на рисунке справа) давление снижается.
В приведенном ниже примере мы видим, что давление также уменьшилось за счет демонстрации эффекта увеличения площади контакта под стопой.
В этом варианте классического сценария «ложе из гвоздей» мы видим, что давление уменьшается по мере увеличения площади. Сила снова остается постоянной.
Эта идея используется в конструкции гильзы протеза, чтобы попытаться распределить усилие по достаточно большой площади, чтобы снизить давление до приемлемого уровня.
Часто пациенты просят снять неудобную часть протеза. Иногда, когда это делается, площадь, на которую распространяется сила, уменьшается. Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Следовательно, согласно приведенному выше уравнению P=F/A, давление увеличивается. Это может привести к усилению боли через некоторое время.
Общий биомеханический принцип — это понимание центра масс [2] , иногда называемого центром тяжести. Это середина массы объекта, и можно предположить, что сила тяжести действует на объект из этой точки. Это также место, вокруг которого будут происходить вращения.
У человека с ампутированными конечностями в связи с удалением некоторой массы изменяется центр масс человека.
Сила реакции опоры (GRF) возникает при контакте с опорной поверхностью, она равна и противодействует силе, возникающей из-за прохождения массы тела через стопу на поверхность земли [3] .
Следует отметить, что «сила, обусловленная массой тела» включает в себя импульс и ускорение массы тела, а также только воздействие на нее силы тяжести. Следовательно, она отличается и в то же время похожа на весовую линию.
Выравнивание протеза изменяет походку, манипулируя положением нижней конечности и суставов протеза по отношению к силе реакции опоры (подробнее см. здесь).
здесь).
GRF не используется клинически во многих местах из-за сложности его получения в режиме реального времени. Клиницисты могут попытаться понять движения, которые они видят, понимая, какое влияние GRF может оказывать на человеческое тело и протез.
Если Сила не воздействует непосредственно на COM объекта, она будет вращать объект. Если сила не действует через середину соединения с другим сегментом, она изменит угол соединения. В приведенном ниже примере стопу и ногу следует рассматривать как два сегмента, соединенных в голеностопном суставе. Поскольку GRF «толкает» стопу вверх, она будет склоняться к тыльному сгибанию стопы. Сила создает крутящий момент, который равен величине силы, умноженной на длину плеча рычага (расстояние от линии действия силы до центра сустава)
При нормальном движении человека момент, создаваемый внешней силой реакции опоры, уравновешивается (по большей части) внутренней мышечной силой, которая создает противодействующий момент.
Это общее правило не всегда верно на 100%, но является полезным приближением. В случае быстрого или силового движения эти моменты не уравновешены. Также в случае полного разгибания колена в положении стоя именно напряжение в тканях заднего отдела колена создает уравновешивающий момент.
В этом примере момент тыльного сгибания, создаваемый передней GRF, уравновешивается плантаторными сгибателями за счет напряжения ахиллова сухожилия. Эта мышца имеет фиксированное плечо рычага.
У людей с ампутациями отсутствует прямой мышечный контроль над некоторыми суставами.
У людей с ампутациями отсутствуют части тела, поэтому в некоторых случаях мышечная деятельность не может действовать в качестве противодействия GRF, поскольку мышцы и суставы больше не присутствуют. Если GRF проходит впереди лодыжки у человека с транстибиальной ампутацией, то лодыжка остается достаточно жесткой, чтобы сопротивляться деформации в тыльное сгибание. (Это не относится к механическим протезам стопы, таким как стопа Propio от Ossur).
В случае трансфеморальной ампутации со свободным коленом (без фиксирующего механизма) GRF следует размещать впереди колена на время поддержки одной конечности. Это делается следующим образом посредством статического выравнивания с использованием более узнаваемой линии вертела бедра и лодыжки (ТКА).
В этом сценарии человек с ампутацией продолжает косвенно контролировать колено, хотя и может разгибать тазобедренный сустав. Когда возникают нежелательные биомеханические ситуации, протезист может иметь возможность изменить биомеханическую ситуацию, зафиксировав сустав для движения или манипулируя и перемещая GRF в более выгодное положение.
Осевая нагрузка протеза[править | править исходный код]
В норме силы тела передаются от скелетной системы к земле через основание опоры, которое включает структуры подошвенной поверхности стопы (пяточная кость, латеральный продольный свод, плюсневые головки и пальцы). У человека с ампутированной нижней конечностью эта структура может отсутствовать. Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Одной из основных задач протеза нижней конечности является обеспечение среды для осевой нагрузки (также известной как передача вертикальной силы вдоль длинной оси тела). Другими словами, он должен удерживать вес тела в положении стоя. Сила, создаваемая весом тела, «толкает» протез вниз. Сила проходит через протез и вниз в землю. Протез должен быть достаточно прочным, чтобы выдерживать такой вес. Компоненты протезов от производителей рассчитаны на различные допуски по весу. Детали, изготовленные по индивидуальному заказу, должны быть достаточно прочными, чтобы выдержать вес, и могут быть изготовлены в соответствии с рекомендациями или по усмотрению протезиста.
Осевая нагрузка достигается за счет обеспечения достаточной противодействующей силы для сопротивления действию силы тяжести. Эта сила должна быть распределена по участкам, устойчивым к давлению. Хорошее понимание этого необходимо для проектирования гильзы протеза.
Когда мы думаем о силах в протезе, гильза протеза обеспечивает среду для прохождения сил от:
- от земли до человека
И - от человека к земле.

Протезист оказывает давление на кожу, чтобы передать усилия от протеза на костную систему человека с ампутированной конечностью. Если площадь идеально подходит для осевой нагрузки, то через нее может передаваться большое количество силы. Силы, как правило, прикладывают параллельно коже, уменьшая величину отвесных сил. Опорные силы протеза на культе всегда параллельны силе реакции опоры.
Изменение положения конечности (на некоторое сгибание) может повлиять на доступную площадь для передачи вертикальной силы. Зеленая область под гнездами на рисунке ниже показывает доступную площадь для передачи вертикальной силы.
Чем больше сгибание, тем больше площадь становится доступной для передачи вертикальной силы.
Большее сгибание в суставе может иметь долгосрочные последствия для диапазона движений в суставе и должно тщательно рассматриваться как решение проблем с осевой нагрузкой.
Соединение между гильзой протеза и культей человека с ампутированной конечностью не является полностью жестким. Эту связь можно представить как нечто вроде соединения двух сегментов тела.
Эту связь можно представить как нечто вроде соединения двух сегментов тела.
На этом снимке мы видим, что GRF человека с ампутацией не «толкает» протез прямо вверх. Скорее, он «толкает» медиально. Это создает крутящий момент или момент вокруг муфты между гнездом и человеком с ампутированной конечностью. Мягкие ткани сдавливаются при вращении, что приводит к давлению внутри гильзы протеза. Давление, возникающее в результате торка, показано красными стрелками внизу, проксимально медиально и дистально латерально.
Этому крутящему моменту противодействует сжатие мягких тканей, другими словами, крутящий момент гильзы вызывает давление в определенных частях гильзы протеза предсказуемым образом. Проблемами давления в лунке всегда должен заниматься протезист, который понимает важность выравнивания. Слишком быстрый переход к переделке гнезда не всегда является хорошим решением в клинике. Изменения центровки обычно происходят быстро и легко обратимы с помощью современных компонентов.
К телу человека при протезировании прикладывают силы, это неизменно приводит к давлению. Давлением можно управлять, увеличивая площадь, на которую оно воздействует, и продуманно распределяя его на области, устойчивые к давлению. Выравнивание протеза нижней конечности может влиять на давление в лунке предсказуемым образом. Изменения в протезе могут изменить преобладающую биомеханическую ситуацию за счет ограничения диапазона движений или перемещения GRF.
Протезист — ключевой специалист, которому поручено управление протезом и его воздействием на организм человека. Присутствие протезиста в составе междисциплинарной команды необходимо для успешной ортопедической реабилитации. Использование знаний биомеханики протезистом дает значительные возможности для оптимизации биомеханических условий для пользователя протеза.
Биомеханика протезирования нижних конечностей
Протезирование нижних конечностей: кинезиология и биомеханика
Нормальная человеческая локомоция, Часть 2: Движение, сила реакции опоры и мышечная активность
Силы наземного реагирования
Коленный направитель WestMARC для многопрофильной бригады протезистов
Учебники
- Левин Д.