Содержание
Все страницы — Юнионпедия
Все страницы — Юнионпедия
Новый! Скачать Юнионпедия на вашем Android™ устройстве!
Свободно
Более быстрый доступ, чем браузер!
Все страницы · Предыдущая (Чамберлин) · Следующий (Чанг, Сара)
Из:
| Чанъэ-3 | Чанъэ-4 | Чанъэ-5 |
| Чанъэ-5Т1 | Чанъэ-6 | Чанъях |
| Чанъу | Чанъань | Чанъань (Сиань) |
| Чанъань (Шицзячжуан) | Чанъань (значения) | Чанъаньцзе |
| Чанъи | Чанъи (Вэйфан) | Чанъи (Гирин) |
| Чанъи-ван | Чанъи-ван (династия Хань) | Чанъи-ван Хэ |
| Чанюфф | Чанюйраптор | Чанс |
| Чанс Воут AU-1 Корсар | Чанс, Майкл | Чансу |
| Чансу-гун | Чансугун | Чанса |
| Чанса Айзек | Чанса Виздом | Чанса, Айзек |
| Чанса, Виздом | Чанса, Виздом Мумба | Чансан (станция метро) |
| Чансань | Чансиндао | Чансиндао (Шанхай) |
| Чансиндао (Далянь) | Чанский язык | Чанслер |
| Чансон | Чансон-гун | Чансонгун |
| Чансельор, Джон | Чанселлор | Чанселлор Джон Уильям |
| Чанселлор, Анна | Чанселлор, Джастин | Чанселлор, Джон Уильям |
| Чанселор Беннетт | Чанселорсвилльская кампания | Чань |
| Чань Чу | Чань Юнянь | Чань, Питер |
| Чань, Сита | Чань-цзун | Чань-буддизм |
| Чань-Буддизм | Чаньэ-1 | Чаньяраль |
| Чаньяраль (значения) | Чаньяраль (провинция) | Чаньша Гинде |
| Чаньчун | Чаньчунь | Чаньхэ-Хуэйский район |
| Чаньбайшань | Чаньва | Чаньго |
| Чаньиру | Чаньиру Уро-Нимини | Чаньиру, Уро-Нимини |
| Чаньков | Чанье | Чанье-1 |
| Чануквадзе | Чануквадзе Шота Илларионович | Чануквадзе, Шота Илларионович |
| Чаншу | Чанша | Чанша Цзиньдэ |
| Чанша Гиндэ | Чанша Гинде | Чаншайская операция |
| Чаншоу | Чанён | Чанёнг |
| Чант | Чант, Кларенс Огастес | Чантьяльский язык |
| Чанту | Чантурия | Чантурия Валентин Алексеевич |
| Чантурия Владимир | Чантурия Георгий Отарович | Чантурия, Зураб |
| Чантурия, Валентин Алексеевич | Чантурия, Владимир | Чантурия, Владимир Александрович |
| Чантурия, Георгий | Чантурия, Георгий (футболист) | Чантурия, Георгий Отарович |
| Чантуришвили | Чантуришвили, Вахтанг | Чантхабури |
| Чантхабури (город) | Чантхабури (значения) | Чантхабури (провинция) |
| Чанты-Аргун | Чанты-Аргунский пресный источник | Чантырья |
| Чантри, Френсис Легат | Чанта | Чантада |
| Чантада (значения) | Чантада (комарка) | Чантальвэргыргын |
| Чантальвэгыргын | Чантан | Чантанг |
| Чантий | Чантий (тукхум) | Чантийцы |
| Чантикс | Чантико | Чантлискуре |
| Чантел Барри | Чантель | Чанфэн |
| Чанцюань | Чанцзян | Чанцзи |
| Чанцзи-Хуэйский автономный округ | Чанцин | Чанцово |
| Чанцев | Чанцев Александр Владимирович | Чанцев Анатолий Дмитриевич |
| Чанцев Иван Иванович | Чанцев, Александр Владимирович | Чанцев, Анатолий Дмитриевич |
| Чанцев, Иван Иванович | Чанчэн | Чанчэн (антарктическая станция) |
| Чанчэнцзе | Чанчур | Чанчурян |
| Чанчурян Сурен Вараздатович | Чанчурян, Сурен Вараздатович | Чанчунь |
| Чанчунь (значения) | Чанчунь си-ю цзи | Чанчунь Ятай |
| Чанчунь Лунцзя (аэропорт) | Чанчуньский трамвай | Чанчуньский вокзал |
| Чанчуньский метрополитен | Чанчуньский политехнический университет | Чанчахи |
| Чанчахис-Цкали | Чанчахованис-цкали | Чанчар |
| Чанчамайо (провинция) | Чанчана | Чанчжэн (ракеты) |
| Чанчжэн 1 | Чанчжэн 2 | Чанчжэн 2C |
| Чанчжэн 3 | Чанчжэн-1 | Чанчжэн-11 |
| Чанчжэн-11 (ракета) | Чанчжэн-1D | Чанчжэн-2 |
| Чанчжэн-2A | Чанчжэн-2C | Чанчжэн-2D |
| Чанчжэн-2E | Чанчжэн-2F | Чанчжэн-3 |
| Чанчжэн-3A | Чанчжэн-3B | Чанчжэн-3C |
| Чанчжэн-3В | Чанчжэн-4 | Чанчжэн-4A |
| Чанчжэн-4B | Чанчжэн-4C | Чанчжэн-4Б |
| Чанчжэн-5 | Чанчжэн-5B | Чанчжэн-6 |
| Чанчжэн-6 (ракета) | Чанчжэн-7 | Чанчжэн-7 (ракета) |
| Чанчжэн-9 | Чанчжи | Чанчжи (уезд) |
| Чанчжоу | Чанчжоуский метрополитен | Чанчибадзе |
| Чанчибадзе Порфирий Георгиевич | Чанчибадзе, Порфирий | Чанчибадзе, Порфирий Георгиевич |
| Чанчимино | Чанчимино, Вито | Чанчимино, Вито Альфио |
| Чанчкери | Чанчкери (Гагрский муниципалитет) | Чанхьён |
| Чанху-Даро | Чанхударо | Чанхын |
| Чанхын-гун | Чанхынгун | Чанхассен (город, Миннесота) |
| Чанхай | Чаны | Чаны (рабочий посёлок) |
| Чаны (озеро) | Чаны (пос. гор. типа в Новосибирской обл.) гор. типа в Новосибирской обл.) | Чаны (посёлок городского типа) |
| Чаны (посёлок) | Чаны (поселок) | Чаны для посола рыбы |
| Чаны-Сакан | Чанышев | Чанышев А. |
| Чанышев А. Н. | Чанышев Арсений Николаевич | Чанышев Анвер Хайдарович |
| Чанышев Якуб Джангирович | Чанышев, Арсений | Чанышев, Арсений Николаевич |
| Чанышев, Амир Идрисович | Чанышев, Анвер Хайдарович | Чанышев, Якуб Джангирович |
| Чаныж | Чанручей | Чана Порпаоин |
| Чанатхип Сонгкрасин | Чанатип Сонхам | Чанахчи |
| Чанахи | Чанарамби (тауншип, Миннесота) | Чанаб |
| Чанад | Чанад Сегеди | Чанаджия, Дарио |
| Чанак | Чанак (станция) | Чанак, Максим |
| Чанакья | Чанаккале | Чанаккале (значения) |
| Чанаккале (ил) | Чанаккале-Богазы | Чаналь (муниципалитет) |
| Чанань | Чананка | Чанбэйское газовое месторождение |
| Чанба | Чанба Нодар Викторович | Чанба Самсон Яковлевич |
| Чанба, Олег Евгеньевич | Чанба, Нодар Викторович | Чанба, Самсон |
| Чанба, Самсон Яковлевич | Чанбара | Чанбарисов |
| Чанбарисов Шайхулла Хабибуллович | Чанбарисов, Шайхулла Хабибуллович | Чанбай-Корейский автономный уезд |
| Чанбайшань | Чанбайшань (плоскогорье) | Чанбинь |
| Чанвэй Гу | Чанвэй, Гу | Чанвиракул, Чаоварат |
| Чанвон | Чанг | Чанг (напиток) |
| Чанг (остров) | Чанг (пиво) | Чанг По Я |
| Чанг Наварро | Чанг Наварро, Хуан Пабло | Чанг Сара |
| Чанг Эскобедо, Хосе Антонио | Чанг и Энг Банкеры | Чанг Марин |
| Чанг Марин, Карлос Франсиско | Чанг Марк | Чанг Ин-нам |
| Чанг Ин-нам, Павел | Чанг Ла | Чанг Линг Су |
| Чанг, Кристина | Чанг, Клемент | Чанг, Алекса |
Китайский зонд «Чанъэ-5» доставил на землю образцы лунного грунта
Предоставлено CHINA DAILY
Успешная посадка ознаменовала собой завершение исторической 23-дневной экспедиции зонда.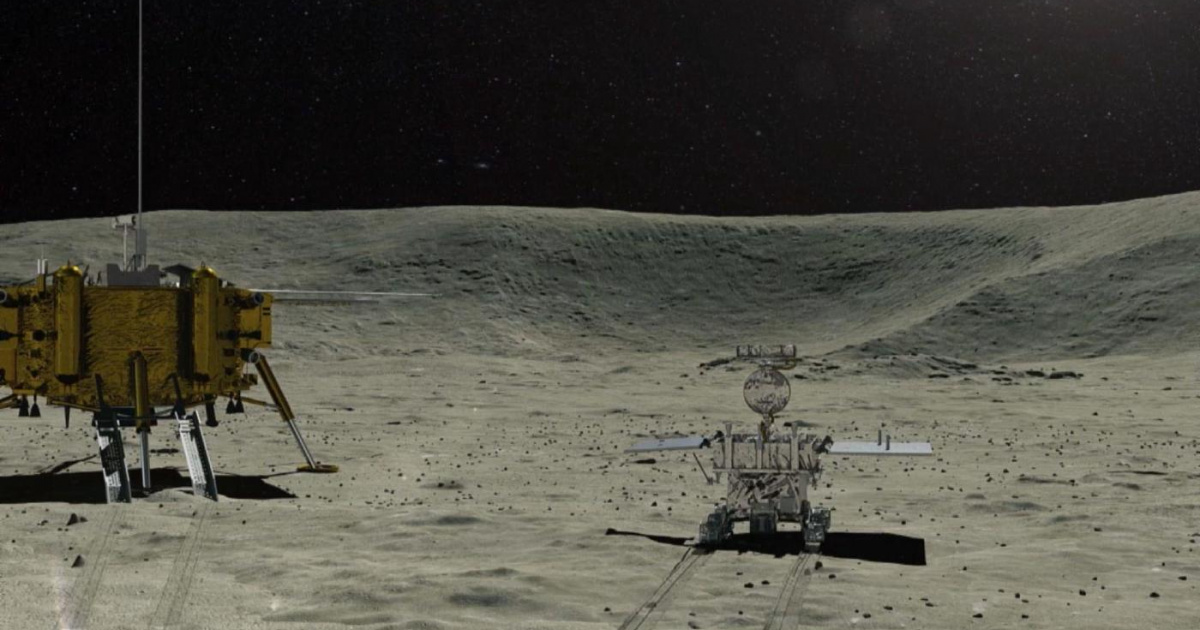 Это первая за 40 лет экспедиция, которая доставила на Землю образцы лунного грунта, а Китай стал третьей страной, совершившей этот подвиг после Советского Союза и США.
Это первая за 40 лет экспедиция, которая доставила на Землю образцы лунного грунта, а Китай стал третьей страной, совершившей этот подвиг после Советского Союза и США.
Результаты миссии поспособствуют более глубокому пониманию происхождения Луны и эволюции Солнечной системы, отметил председатель Си Цзиньпин в поздравительном послании.
Следующий шаг — передача запечатанных образцов в специально созданные лаборатории для анализа, опытов и тестов.
По словам заместителя главы Китайского национального космического управления У Яньхуа, часть образцов лунного грунта будет использована для исследований, часть выставят в музеях, а часть передадут партнерам по отрасли из других стран или подарят главам государств и высокопоставленным лицам. Однако в основном ценные образцы все же будут использоваться в исследованиях, сказал он.
Официальный представитель Китайского национального космического управления Сюй Хунлян сказал: «Образцы лунного грунта — достояние всего человечества. Мы готовы сотрудничать с иностранными коллегами, основываясь на принципах справедливости и взаимовыгодного сотрудничества».
Мы готовы сотрудничать с иностранными коллегами, основываясь на принципах справедливости и взаимовыгодного сотрудничества».
Это первая за 40 лет экспедиция, которая доставила на Землю образцы лунного грунта
«Чанъэ-5», самый большой и технологичный лунный зонд Китая, состоит из четырех основных компонентов — орбитального модуля, посадочного модуля, взлетного аппарата и возвращаемой капсулы. «Чанъэ-5» был запущен ракетой-носителем тяжелого класса «Чанчжэн-5» 24 ноября с космодрома Вэньчан в провинции Хайнань. Так началась самая сложная космическая миссия Китая, ставшая первой в мире миссией по добыче образцов лунного грунта с 1976 года.
30 ноября «Чанъэ-5» вышел на лунную орбиту и разделился на две части: взлетный аппарат с посадочным модулем и орбитальный модуль с возвращаемой капсулой.
1 декабря орбитальный модуль с возвращаемой капсулой сел на Луну, став третьим космическим аппаратом в мире, достигшим ее поверхности в этом столетии после своих предшественников «Чанъэ-3» и «Чанъэ-4».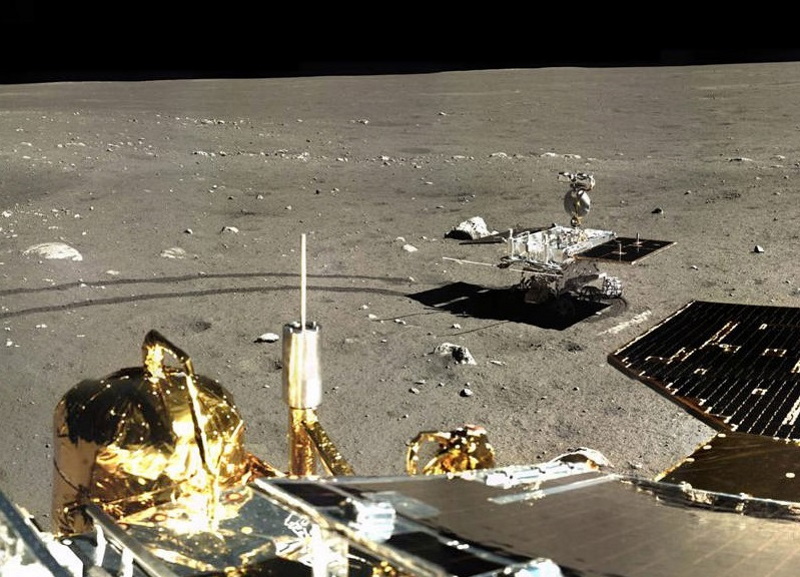
Модуль с капсулой приземлился недалеко от пика Рюмкера, изолированного вулканического образования в Oceanus Procellarum, или Океане Бурь, на западном крае ближней стороны Луны. Раньше в этом районе никто не приземлялся.
Вскоре после приземления аппарат начал выполнение основных задач, используя бур для добычи 500 граммов образцов из-под поверхности и манипулятор для забора 1,5 кг грунта с поверхности.
Операция по забору грунта закончилась 2 декабря и заняла около 19 часов — намного быстрее, чем ожидалось. Образцы были упакованы в вакуумный контейнер внутри взлетного аппарата. Пока шел забор, посадочный модуль развернул первый на Луне отдельно стоящий национальный флаг КНР.
3 декабря взлетный аппарат запустил двигатели, чтобы подняться на эллиптическую лунную орбиту и подготовиться к стыковке с возвращаемой капсулой. Впервые китайский космический аппарат оторвался от внеземного тела.
6 декабря взлетный аппарат состыковался с орбитальным модулем и возвращаемой капсулой и перегрузил образцы грунта в капсулу. Позже в тот же день взлетный аппарат отделился от орбитального модуля, и 8 декабря ему был подан сигнал опуститься на Луну повторно.
Позже в тот же день взлетный аппарат отделился от орбитального модуля, и 8 декабря ему был подан сигнал опуститься на Луну повторно.
Почти за шесть дней нахождения на лунной орбите модуль с капсулой совершил два орбитальных маневра. После этого 13 декабря модуль с капсулой вышел на переходную траекторию от Луны к Земле и начал возвращение на Землю.
В Китайском национальном космическом управлении заявили, что у миссии «Чанъэ-5» было несколько задач. С точки зрения космической инженерии, миссия должна была опробовать технологии и аппаратуру для автономного сбора и упаковки образцов лунного грунта, запуск аппарата с поверхности Луны и стыковку на лунной орбите.
С точки зрения науки, перед миссией стояла задача исследовать геологические и топографические особенности места посадки, что позволило ученым проанализировать структуру и физические характеристики лунных образцов и тем самым продвинуться в исследованиях о происхождении и эволюции Луны.
Кроме того, миссия была направлена на пополнение знаний, развитие технологий и кадрового потенциала страны для будущих пилотируемых лунных миссий и других экспедиций в глубокий космос.
После объявления о приземлении возвращаемой капсулы помощник администратора НАСА по науке Томас Зурбухен написал в социальных сетях: «Поздравляю Китай с возвращением лунных образцов на Землю! Международное научное сообщество празднует успех миссии «Чанъэ-5″. Эти образцы помогут раскрыть секреты системы Земля — Луна и получить новые знания об истории Солнечной системы».
В ходе следующей лунной миссии «Чанъэ-6» Китай планирует собрать образцы с южного полюса Луны или, возможно, с ее обратной стороны, сказал 17 декабря У Яньхуа из Китайского национального космического управления.
«Никто раньше не ставил перед собой задачу доставить образцы с обратной стороны Луны, и если мы это сделаем, это будет иметь большое значение для ученых всего мира».
По словам У, решение о том, будет ли Китай проводить пилотируемые полеты на Луну, будет принято после того, как страна введет в эксплуатацию обитаемую космическую станцию. По плану это должно произойти в 2022 году.
Космический аппарат «Чанъэ-4» совершил успешную посадку на обратной стороне Луны и прислал первое фото / Хабр
Китайский космический аппарат «Чанъэ-4» впервые в истории человечества совершил мягкую посадку на обратной стороне Луны, сообщается в твиттере официального китайского агентства «Синьхуа».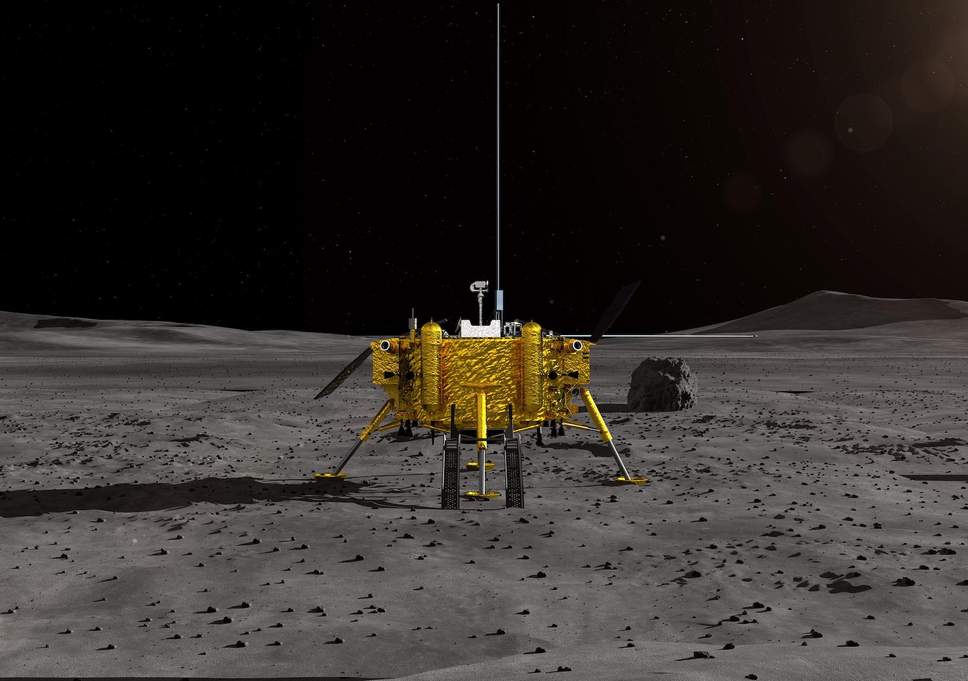
В агентстве Associated Press, со ссылкой на китайское телевидение, уточнили, что аппарат прилунился в 10.26 по Пекинскому времени (это утро четверга 5.26 по Московскому времени).
Китайские власти особенно подчеркивают, что данное космическое событие является «важной вехой в освоении космических просторов».
Новые фото «Lunar rover Yutu-2» добавлены в статью.
В продолжении этого поста.
«Китайская станция «Чанъэ-4» совершила посадку на обратной стороне Луны в четверг 3 января 2019 года, став первым аппаратом, мягко севшим на неизученной стороне, которая никогда не видна с Земли», — Об этом долгожданном событии сообщили китайские государственные СМИ
Зонд, в составе которого находится посадочный аппарат и луноход, совершил посадку в заранее выбранном районе.
Зонд сел в кратере Карман – это огромный древний ударный кратер в южном полушарии обратной стороны Луны.
Выбранная посадочная площадка находится в южной части кратера Карман диаметром 186 км, который предлагает относительно ровные участки с небольшим количеством склонов или видимых препятствий для безопасной посадки.
Координаты места посадки аппарата — 177,6 градусов восточной долготы, 45,5 градусов южной широты, что достаточно близко к предварительно установленному месту.
Подробности посадки:
— сначала на высоте 6-8 километров аппарат произвел оценку своего местоположения.
— на высоте порядка 100 метров он приостановил снижение для анализа информации на предмет возможных препятствий на пути, а уже потом произвел посадку.
Сообщения о посадке аппарата начались с неразберихи, так как изначально китайские СМИ сообщили об успешном касании лунной поверхности, однако затем из твитера были удалены данные сообщения.
Это привело к предположениям, что аппарат разбился при посадке или произошла нештатная ситуация. Но позже информацию обновили и выпустили официальные заявления об успешной посадке.
Данная посадка на Луне проходила почти под покровом тайны, так как не было ни прямой трансляции из ЦУПа, ни предваряющих пресс-конференций.
Уже в 11.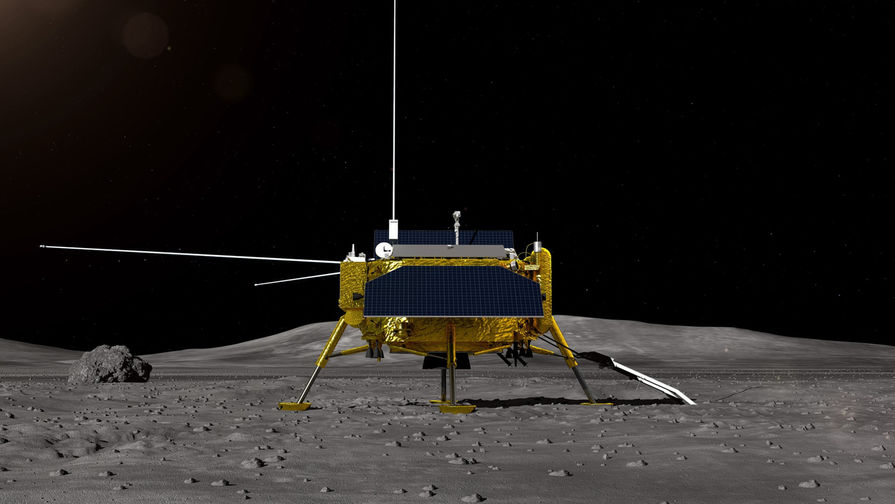 40 по Пекинскому времени (6.40 МСК) аппарат сделал первый в истории снимок поверхности обратной стороны Луны с места посадки и передал его на Землю.
40 по Пекинскому времени (6.40 МСК) аппарат сделал первый в истории снимок поверхности обратной стороны Луны с места посадки и передал его на Землю.
Почему такой цвет? Ответ тут.
Новые фото Lunar rover Yutu-2 отсюда.
После семи часов подготовки лунный ровер Yutu-2 смог выйти из посадочного модуля и начать свои первые исследования.
«Нефритовый Кролик-2» будет изучать лунную поверхность до окончания солнечного дня на той стороне Луны, который продлится до 12 января, после Yutu-2 ожидает 14 суток лунной ночи.
Впервые запечатлеть обратную сторону Луны удалось советской АМС «Луна-3» 7 октября 1959 года. После этого луну облетали и другие аппараты, в том числе космический корабль «Аполлон-8» с американскими астронавтами на борту.
Тем не менее, дальняя от Земли часть поверхности её спутника до сегодняшнего дня ещё ни разу не была сфотографирована вблизи.
Основная проблема заключается в том, что обратная сторона никогда не видна с Земли, из-за явления приливного захвата.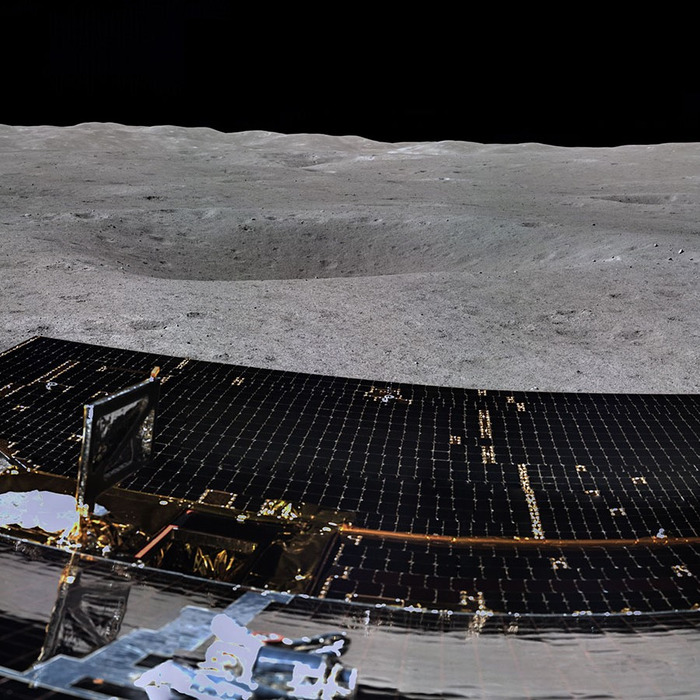 Это означает, что за пределами Луны должен находиться спутник для передачи сообщений между наземными станциями слежения и космическим аппаратом.
Это означает, что за пределами Луны должен находиться спутник для передачи сообщений между наземными станциями слежения и космическим аппаратом.
Cпутник-ретранслятор «Цэюцяо» (сорочий мост), запущенный в мае, работает на гало-орбите вокруг особой гравитационно стабильной точки Лагранжа Земля-Луна L2, из которой он может поддерживать прямую видимость с Землей и лунной обратной стороной в любое время.
Мировая реакция на это историческое событие:
Станция «Чанъэ-4», запущенная три недели назад к Луне, вышла на расчетную орбиту 30 декабря.
«Зонд вышел на эллиптическую лунную орбиту с переселением (минимальное удаление от поверхности Луны) 15 километров и апоселением (максимальное удаление) 100 километров в 8.55 по Пекинскому времени (3.55 по Московскому времени)», — говорилось в сообщении «Синьхуа» тогда.
Впервые аппарат достиг орбиты Луны еще 12 декабря, с тех пор специалисты китайского центра управления полетами дважды корректировали орбиту станции и тестировали связь между аппаратом и спутником-ретранслятором «Цюэцяо».
За это время также проверялась работа передающих камер и лазерных высотометров, которые будут задействованы при посадке.
Китай запустил космическую станцию «Чанъэ-4», которой предстоит впервые в истории человечества исследовать обратную сторону Луны, 7 декабря 2018 года в 21:20 мск. «Чанъэ-4» является частью лунной программы Китая, продолжением и дублером «Чанъэ-3».
Запуск и мягкая посадка на Луну первоначально планировались в 2015 году, но были перенесены на 2018 год. Поскольку отсутствует прямая видимость, для организации связи с аппаратами будет использоваться ретрансляционный спутник «Цюэцяо», который был запущен с космодрома Сичан 20 мая 2018 года.
«Чанъэ-4» стала дублером «Чанъэ-3», перед ней стоят те же задачи — мягкая посадка на Луну и изучение ее поверхности.
Станция «Чанъэ-3», запущенная 2 декабря 2013 года, доставила на поверхность Луны луноход «Юйту». Он был оборудован георадаром и двумя спектрометрами для изучения лунного грунта. Но миссию не удалось реализовать полностью — спустя 40 дней луноход потерял подвижность, хотя и продолжал работать, стоя на месте. 3 августа 2016 года было объявлено, что «Юйту» завершил работу.
3 августа 2016 года было объявлено, что «Юйту» завершил работу.
Главное отличие миссии в том, что станция впервые в истории села именно на обратной стороне Луны, где за 60 лет исследований космоса не высаживалась ни одна станция.
Важной задачей в рамках миссии станут биологические эксперименты.
Вместе со станцией на обратную сторону Луны в герметичном контейнере отправились семена картофеля, резуховидки Таля (растения семейства капустных) и яйца шелкопряда.
Исследователи планируют проверить, возможно ли создать в космическом аппарате замкнутую экосистему, в которой личинки будут вырабатывать углекислый газ, а растения — преобразовывать его в кислород с помощью фотосинтеза.
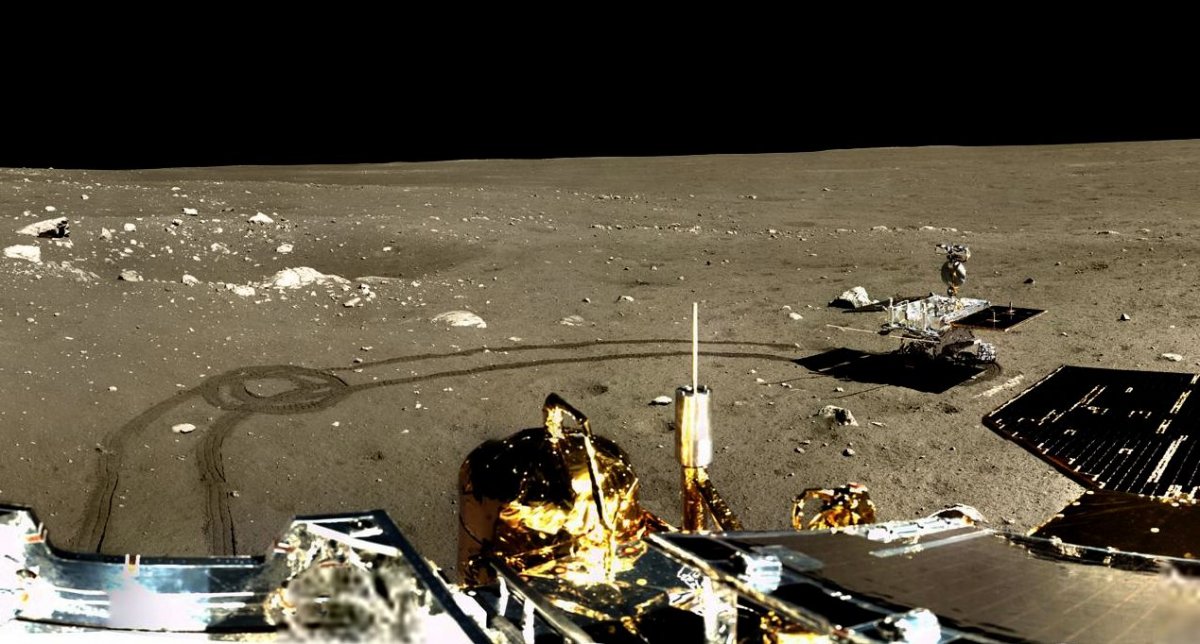
Китайский лунный модуль «Чанъэ-3» все еще работает после 7 лет на Луне
Крупный план посадочного модуля Chang’e 3, сделанный Yutu в 2013 году.
(Изображение предоставлено CNSA/CLEP)
Согласно обновленной информации Национального космического управления Китая, у Китая есть лунные космические аппараты, работающие как на ближней, так и на дальней стороне Луны.
Лунная миссия «Чанъэ-3», включающая в себя лунный посадочный модуль и небольшой ровер, приземлилась в Море Имбриума еще в декабре 2013 года, чтобы сделать Китай лишь третьей страной, совершившей мягкую посадку на Луне.
И хотя марсоход проглотил лунную пыль после 31 месяца нахождения на поверхности, посадочный модуль все еще работает, спустя более 2400 дней после приземления, заявил Центр исследования Луны и космической программы в начале сентября.
Связанный: Chang’e 3 фотографии: первый китайский луноход и луноход , который управляет телескопом. Автоматический инструмент отслеживал переменные звезды и даже вернул изображение галактики Вертушка (M101) с Луны.
Изображение галактики Вертушка (Мессье 101), полученное ультрафиолетовым телескопом Чанъэ-3. (Изображение предоставлено CNSA/CLEP)
Радиолюбители подтвердили активность Chang’e 3, периодически принимая сигналы от посадочного модуля. Космический корабль на солнечной энергии работает в течение лунного дня (который длится около 14 земных дней) и связывается в X- и S-диапазонах с наземными станциями в Китае, в Каши на северо-западе и в Цзямусы на северо-востоке.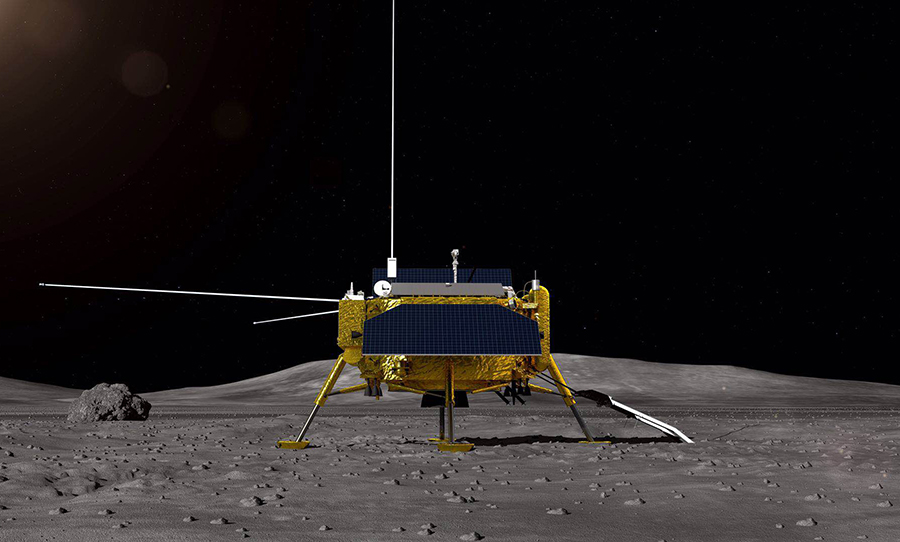 Посадочный модуль согревается в суровые холода лунных ночей с помощью радиоизотопного обогревателя.
Посадочный модуль согревается в суровые холода лунных ночей с помощью радиоизотопного обогревателя.
Лунный посадочный модуль Chang’e’3 в настоящее время активен в X-диапазоне вне Луны! Нисходящий канал 8495,985 МГц, мощный сигнал! pic.twitter.com/JY6siv93FD1 июня 2020 г.
Подробнее
Луноход по имени Юту (что переводится как «Нефритовый кролик») потерял способность перемещаться в январе 2014 г., ближе к концу второй лунной миссии. день — пройдя в общей сложности 377 футов (114 метров) по лунной поверхности. В то время государственное новостное агентство Китая Синьхуа сообщило, что Юйту столкнулся с «аномалией механического управления», вызванной «сложной обстановкой на лунной поверхности».
Миссия Юту была рассчитана всего на три месяца, но она продолжала функционировать в стационарном состоянии до середины 2016 года. Во время своей миссии Yutu установил новый рекорд по продолжительности работы на поверхности Луны, чем любой другой луноход.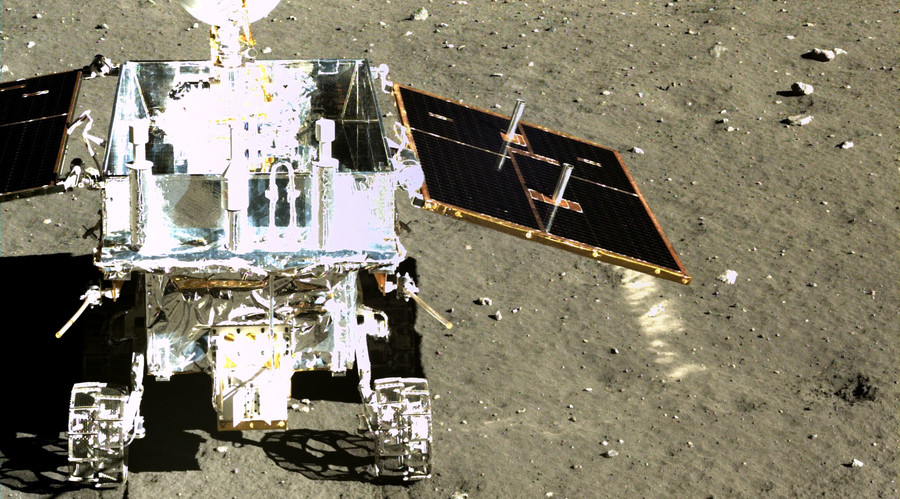
Связанный: Живой или мертвый, китайский ровер Юту много говорит о том, как мы относимся к роботам. (Изображение предоставлено CNSA/CLEP)
Yutu продолжает вносить свой вклад спустя долгое время после своей смерти, а новые научные результаты все еще поступают из данных, собранных марсоходом. Исследователи из Китайского университета геонаук и других институтов недавно обнаружили свидетельства существования трех относительно молодых слоев базальта или вулканической породы на месте посадки «Чанъэ-3» и опубликовали свои выводы 17 августа в журнале Geophysical Research Letters.
Предыдущие исследования предполагали, что этот регион образовался из одного густого потока лавы. Выводы основаны на данных георадара Yutu, который улавливает отраженные сигналы от электромагнитных импульсов, чтобы получить представление о лунных недрах.
Скалы в Mare Imbrium, снятые марсоходом Chang’e 3 Yutu. (Изображение предоставлено CNSA/CLEP)
Тем временем, на обратной стороне Луны, китайская миссия «Чанъэ-4» — преемник «Чанъэ-3» — находится в своем 22-м лунном дне, который начался 10 сентября.
Как и «Чанъэ-3», миссия «Чанъэ-4» включает в себя посадочный модуль и марсоход по имени Юйту-2. Проснувшись лунной ночью без солнечного света, который питал его солнечные батареи, марсоход проснулся и возобновил свою деятельность 7 сентября. 10 в 23:54 EDT (03:54 по Гринвичу 11 сентября), посадочный модуль следует за ним в 17:15. EDT (21:15 по Гринвичу) 11 сентября.
Изображение 1 из 2
(Изображение предоставлено CNSA/CLEP)
Новое изображение лунного реголита, сделанное Yutu 2, опубликовано в сентябре 2020 года.
(Изображение предоставлено CNSA/CLEP)
Новое изображение лунного реголита, сделанное Yutu 2, опубликовано в сентябре 2020 года. базальтовый регион представляет интерес для ученых.
Chang’e 4 изначально был изготовлен в качестве резервной копии Chang’e 3 и совершил первую в истории мягкую посадку на обратной стороне Луны в январе 2019 года. (Изображение предоставлено CNSA/CLEP)
Команда из Научно-исследовательского института аэрокосмической информации Китайской академии наук определила возраст близлежащего кратера Финсен примерно в 3,5 миллиарда лет. Команда использовала цифровые картографические данные Chang’e 2 — лунного зонда, который вращался вокруг Луны в течение восьми месяцев в 2010–2011 годах — для подсчета кратеров и показаний георадара, полученных Yutu 2, для анализа роста реголита в кратере фон Карман. вычислить его возраст.
Команда использовала цифровые картографические данные Chang’e 2 — лунного зонда, который вращался вокруг Луны в течение восьми месяцев в 2010–2011 годах — для подсчета кратеров и показаний георадара, полученных Yutu 2, для анализа роста реголита в кратере фон Карман. вычислить его возраст.
Следуйте за нами в Твиттере @Spacedotcom и на Facebook.
Присоединяйтесь к нашим космическим форумам, чтобы продолжать обсуждать последние миссии, ночное небо и многое другое! А если у вас есть новость, исправление или комментарий, сообщите нам об этом по адресу: [email protected].
Эндрю – независимый космический журналист, специализирующийся на освещении быстро растущего космического сектора Китая. Он начал писать для Space.com в 2019 году и пишет для SpaceNews, IEEE Spectrum, National Geographic, Sky & Telescope, New Scientist и других. Эндрю впервые заразился космической ошибкой, когда в детстве впервые увидел изображения других миров в нашей Солнечной системе, сделанные «Вояджером». Вдали от космоса Эндрю любит бегать по тропам в лесах Финляндии. Вы можете следить за ним в Твиттере @AJ_FI (откроется в новой вкладке).
Вдали от космоса Эндрю любит бегать по тропам в лесах Финляндии. Вы можете следить за ним в Твиттере @AJ_FI (откроется в новой вкладке).
«Чанъэ-3» может быть запущен 1 декабря вместе с «Юйту»…
Вчера китайское космическое агентство провело брифинг для прессы о лунном посадочном модуле «Чанъэ-3». Они объявили, что марсоход получил имя Юту (или «Нефритовый кролик», легендарный спутник богини Чанъэ). Юту был выбран из списка из 10 имен, получив 649 956 голосов из почти 3,5 миллионов поданных голосов. В письменном заявлении, которое я расшифровываю с помощью Google Translate, они отмечают, что имя Юйту олицетворяет китайскую традиционную культуру и отражает их намерение использовать космос в мирных целях, и что они с нетерпением ждут, когда марсоход переплывет залив. радуги. Chang’e 3 будет запущен на Long March III B на прямую переходную орбиту Луны (орбита с перигеем 200 километров и апогеем 380 000 километров).
Как ни странно, на брифинге для прессы не упоминалась конкретная дата и время запуска. Через NASAspaceflight.com я могу передать слух, что он может быть запущен 1 декабря. Слух исходит из личного общения участника форума с другом, который знает кого-то на космодроме Сичан, поэтому я бы не стал сверять часы по нему. , но я сообщу, если это окажется правдой:
Через NASAspaceflight.com я могу передать слух, что он может быть запущен 1 декабря. Слух исходит из личного общения участника форума с другом, который знает кого-то на космодроме Сичан, поэтому я бы не стал сверять часы по нему. , но я сообщу, если это окажется правдой:
Запуск может состояться 2 декабря 2013 года с 1 до 1:30 по стандартному китайскому времени (1 декабря в 9:00 PT / 17:00 UT), с выводом на лунную орбиту 6 декабря в 10:30 (5 декабря в 18:30 PT / 6 декабря в 2:30 UT) и посадкой 16 декабря. Последующий пост указывает на документ 2008 г., в котором говорится, что приземление 16 декабря произойдет в 12:36 UT.
Google Translate — отличный инструмент, но я недостаточно хорош, чтобы быть уверенным в переводе китайского текста. Поэтому я очень благодарен за помощь доктору Юн-Чун Чжэн из Китайской национальной астрономической обсерватории, который помог мне улучшить Google Translate, чтобы понять некоторые ключевые части пресс-релиза и последующую онлайн-сессию вопросов и ответов.
Китай значительно расширил свою сеть наземных станций для связи в дальнем космосе, необходимой для поддержки высадки на Луну и, возможно, для других миссий. Из их переведенного заявления (выделено мной):
Для того, чтобы управлять траекторией движения лунохода, наша страна создала сеть наблюдения и контроля дальнего космоса. Мы построили новую наземную станцию с большой антенной диаметром 66 метров в Цзямусы на северо-востоке Китая, наземную станцию с большой антенной диаметром 35 метров в Кашгаре, Синьцзян на северо-западе Китая. Мы построили обсерваторию, оборудованную большой антенной диаметром 65 метров, для интерферометрии со сверхдлинной базой (РСДБ)… Благодаря строительству этих наземных станций нынешние возможности китайских технологий измерения, управления и связи для исследования космоса почти на одном уровне с миром. У нас есть возможность проводить измерения не только для лунных миссий, но и закладывать основу для будущих исследований дальнего космоса, таких как будущие миссии на Марс.


С момента старта миссии Mars Orbiter из Индии в международных средствах массовой информации было много разговоров о космической гонке между Индией и Китаем. Об этом спросил корреспондент. Вот ответ:
Что касается исследования Луны, Соединенные Штаты уже добились высадки человека на Луну. Бывший Советский Союз добился роботизированного отбора проб и возвращения на Землю. Цель Chang’e 3 — совершить мягкую посадку на Луну.
Я понимаю, что это означает, что если бы Китай видел себя в конкуренции с кем-либо, это было бы с США и Россией; но США и Россия уже давно завершили это исследование Луны. Очевидно, что в этом смысле Китай не конкурирует с этими другими странами. То, что пытается сделать Индия, имеет мало общего с тем, что сейчас делает Китай. Далее они сказали относительно миссии Mars Orbiter:
От имени моих коллег в Китае я поздравляю Индию с успешным запуском. Индийский зонд должен разогнаться за пределы околоземной орбиты и, наконец, выйти на орбиту вокруг Марса.
 Согласно текущим планам, зонд прибудет к Марсу в сентябре 2014 года. Процесс выхода на орбиту вокруг Марса сложен. Если Индия сможет успешно реализовать орбиту Марса, это действительно большое достижение как для Индии, так и для международного сотрудничества. Мы, как китайские коллеги, желаем им успехов.
Согласно текущим планам, зонд прибудет к Марсу в сентябре 2014 года. Процесс выхода на орбиту вокруг Марса сложен. Если Индия сможет успешно реализовать орбиту Марса, это действительно большое достижение как для Индии, так и для международного сотрудничества. Мы, как китайские коллеги, желаем им успехов.Очень любезно. Наконец, о «космических гонках» и вообще о международном освоении космоса:
На самом деле у нас нет желания гоняться ни с одной страной. У Китая есть собственная космическая программа. Мы реализуем наши собственные планы шаг за шагом. Наша цель — мирно использовать космос. Это также консенсус мира. Людям необходимо использовать космические ресурсы для поддержки устойчивого развития.
В прошлом месяце в Пекине открылась конференция Международной астронавтической федерации. Это было большое событие в аэрокосмической отрасли. Развитие космической отрасли Китая получило признание мирового сообщества. На этой конференции президент Китайского национального космического управления Синьруй Ма ясно заявил, что космическая программа Китая открыта для всего мира.
 Международное сотрудничество поощряется и приветствуется. Китай завершит строительство собственной космической станции в 2020 году. Наша космическая станция открыта для всего мира. Мы приветствуем использование космической станции другими странами. Точно так же наша программа исследования Луны также открыта для всех. У нас есть искренняя готовность к международному сотрудничеству. [Другие] могут присоединиться к лунной программе Китая и вместе работать над будущими исследованиями Луны.
Международное сотрудничество поощряется и приветствуется. Китай завершит строительство собственной космической станции в 2020 году. Наша космическая станция открыта для всего мира. Мы приветствуем использование космической станции другими странами. Точно так же наша программа исследования Луны также открыта для всех. У нас есть искренняя готовность к международному сотрудничеству. [Другие] могут присоединиться к лунной программе Китая и вместе работать над будущими исследованиями Луны. Слова важны, и я рад их слышать. Между американским и китайским правительствами существует большое недоверие, а общению мешает языковой барьер, который не может преодолеть даже могучая мощь Google. Слава Богу за помощь людей, которые искренне желают международного сотрудничества. Если и есть место, где международное сотрудничество восторжествовало над политическими разногласиями, так это в научном исследовании нашей вселенной. Там, где в официальных заявлениях говорится о намерении сотрудничать, ученые могут открыто действовать в соответствии с этим намерением обмениваться данными друг с другом.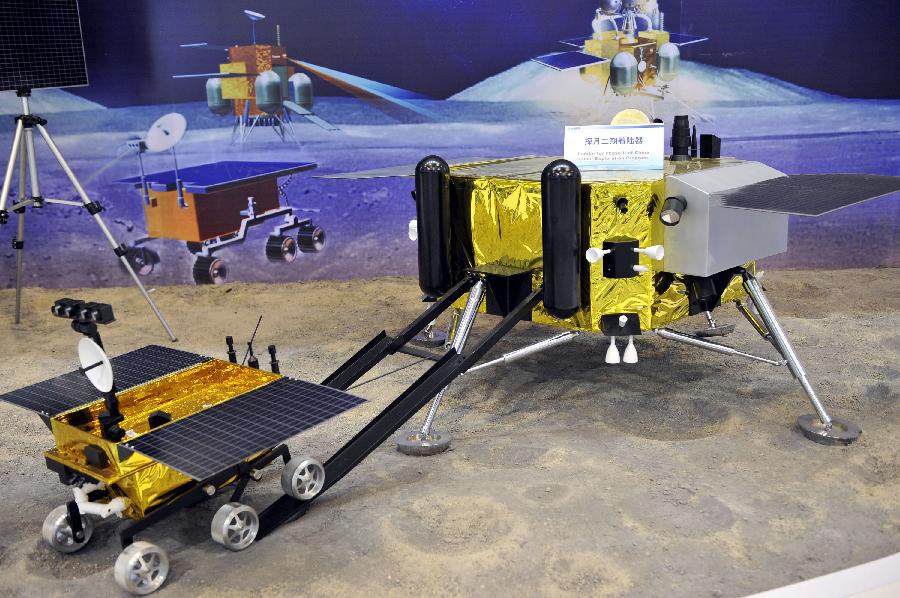
По иронии судьбы, помощь в переводе, которую я получил от доктора Чжэн, возникла из-за вызывающего разногласия заголовка статьи Леонарда Дэвида, опубликованного на сайте space.com: «Первый китайский лунный модуль может создать проблемы для миссии НАСА по исследованию лунной пыли». Посадка Chang’e 3 (запланированная на 16 декабря) состоится примерно через шесть недель после миссии LADEE по мониторингу пыли. LADEE изучает лунную атмосферу и пылевую среду, которая очень мало была нарушена с момента последней посадки Аполлона и Луны, и посадка Chang’e 3 определенно будет иметь эффект, который LADEE сможет обнаружить. Разве это не проблема для LADEE?
Ну, это своего рода проблема, но скорее возможность. (Да, «crisitunity».) Пол Спудис на самом деле очень хорошо объяснил это в своем блоге два месяца назад (спасибо Ричарду Элфику за ссылку): Начавшиеся наблюдения превратились в счастливое событие для лунной науки. Поскольку мы не очень хорошо понимаем, как экзосферные газы добавляются и удаляются с Луны, то, что попало в наши руки, является незапланированным (но контролируемым) экспериментом. Известное количество газов известного состава будет добавлено в лунную атмосферу в точно известное время, в точно известном месте. Нельзя было придумать лучшего эксперимента для измерения того, как распределяется это добавление материала, как его распределение меняется с течением времени и как эти выбрасываемые газы рассеиваются в окололунное пространство. Более того, у LADEE будет почти целый месяц для мониторинга и характеристики лунной атмосферы до прибытия ЧанъЭ, что позволит нам сначала наблюдать «естественную» Луну, а затем «загрязненную» Луну и то, как лунная атмосфера восстанавливается после своего загрязнения. .
Известное количество газов известного состава будет добавлено в лунную атмосферу в точно известное время, в точно известном месте. Нельзя было придумать лучшего эксперимента для измерения того, как распределяется это добавление материала, как его распределение меняется с течением времени и как эти выбрасываемые газы рассеиваются в окололунное пространство. Более того, у LADEE будет почти целый месяц для мониторинга и характеристики лунной атмосферы до прибытия ЧанъЭ, что позволит нам сначала наблюдать «естественную» Луну, а затем «загрязненную» Луну и то, как лунная атмосфера восстанавливается после своего загрязнения. .
Ничто из этого не было запланировано заранее — китайцы планируют свои миссии на основе собственного расписания и программных потребностей (точно так же, как лунные цели НАСА изменились за последние 5 лет). Но благодаря удачному совпадению графиков у нас есть уникальная возможность наблюдать в режиме реального времени за тем, как работает Луна. Будем надеяться, что китайцы предоставят нам подробные данные о массовых характеристиках своего космического корабля и о том, какое именно топливо он несет, но даже если они этого не сделают, физика диктует определенную массу и объем выхлопного газа, и его состав будет измерен LADEE. (что позволяет нам узнать тип используемого топлива). Декабрьская миссия китайского посадочного модуля на Луну предоставит нашей миссии в США долгожданный «трафик», дав ученым возможность узнать больше от LADEE, чем мы изначально предполагали.
(что позволяет нам узнать тип используемого топлива). Декабрьская миссия китайского посадочного модуля на Луну предоставит нашей миссии в США долгожданный «трафик», дав ученым возможность узнать больше от LADEE, чем мы изначально предполагали.
Статья Леонарда Дэвида была опубликована в списке рассылки для обсуждения лунной науки, на которую подписаны исследователи со всего мира, а последующее обсуждение того, как Китай на самом деле не портит дела для НАСА, позволило мне познакомиться с несколькими китайскими учеными. Получите балл за международное сотрудничество! Даже если это произошло обратным путем.
Наконец, еще один приятный анекдот о Чанъэ 3 и ее компаньоне-кролике, которые должны отправиться на Луну в субботу. Сегодня участник unmannedspaceflight.com поделился этой частью стенограммы Аполлона-11, в которой Майкл Коллинз говорит луноходам остерегаться девушки и ее кролика:
Кажется, Олдрин и Армстронг опоздали на 44 года, чтобы найти Чанъэ и Юту на Луне.
Планетарный фонд
Ваша поддержка помогает нам исследовать миры, находить жизнь и защищать Землю. Дай сегодня!
Пожертвовать
Подробнее: Программа Chang’e, Chang’e-3 и Yutu, LADEE, Лунные миссии, Статус миссии, Космические миссии
- Обучение
- Артикул
- Планетарное радио
- Космические снимки
- Видео
- Курсы
- Планетарный отчет
- Присоединяйтесь
- Центр действий
- Регистрация по электронной почте
- Стать участником
- Контакт
- Дайте
- Продлить членство
- Поддержите проект
- Магазин поддержки
- Путешествия
- Другие способы пожертвований
Расширение прав и возможностей граждан мира для развития космической науки и исследований.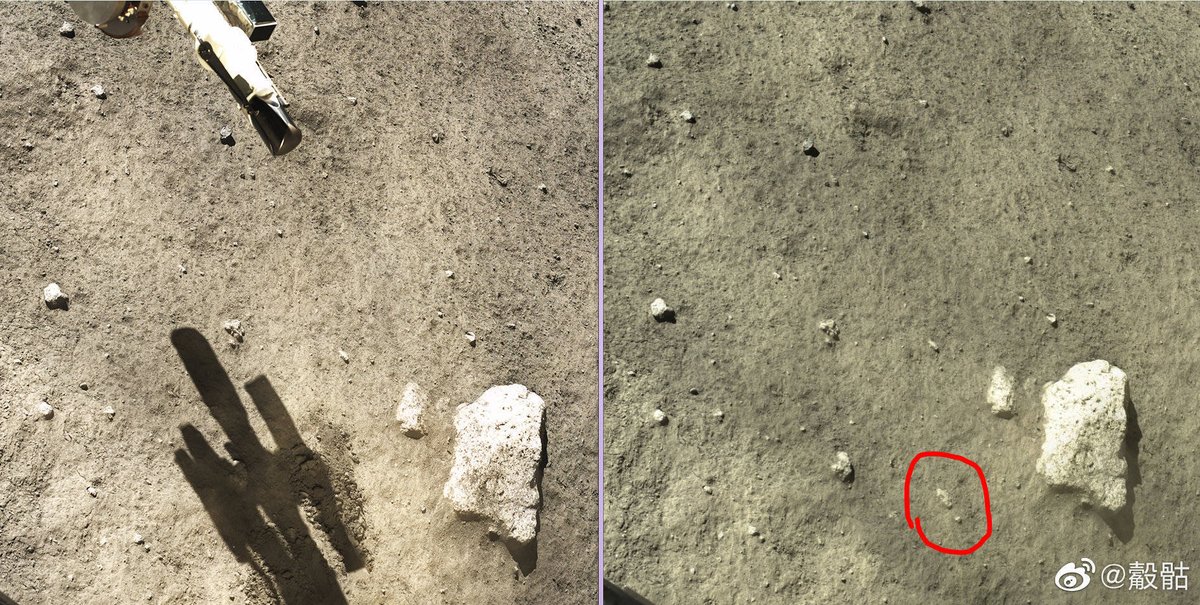
Центр учета • Свяжитесь с нами
Отдавайте с уверенностью. Планетарное общество является зарегистрированной некоммерческой организацией 501(c)(3).
© 2022 Планетарное общество. Все права защищены.
Политика конфиденциальности • Декларация о файлах cookie
900:00 Определение местоположения посадочного модуля «Чанъэ-3» с помощью геодезической РСДБ | Земля, планеты и космос
- Экспресс-письмо
- Открытый доступ
- Опубликовано:
- Гжегож Клопотек
ORCID: orcid.org/0000-0001-7854-7055 1 , - Томас Хобигер 2 ,
- Рюдигер Хаас 1 ,
- Frédéric Jaron 3 ,
- Laura La Porta 3,4 ,
- Axel Nothnagel 3 ,
- Zhongkai Zhang 3 ,
- Songtao Han 5 ,
- Alexander Нейдхардт 6 и
- …
- Кристиан Плетц 7
Земля, планеты и космос
том 71 , Номер статьи: 23 (2019)
Процитировать эту статью
2730 доступов
7 цитирований
2 Альтметрика
Детали показателей
Abstract
Мы представляем результаты анализа наблюдений посадочного модуля «Чанъэ-3» с использованием геодезической интерферометрии со сверхдлинной базой.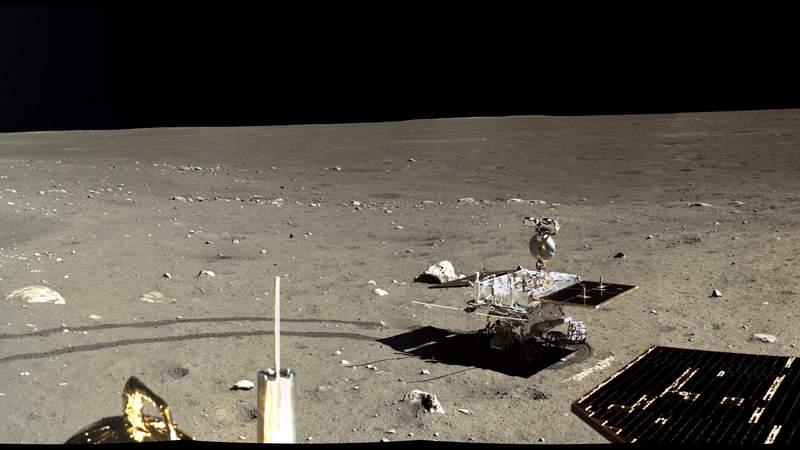 Обсуждается применяемая стратегия обработки, а также факторы, ограничивающие наш подход. Мы подчеркиваем текущую точность таких наблюдений и точность оценок лунных параметров, т. е. координат лунного посадочного модуля, привязанных к Луне. Наш результат для положения спускаемого аппарата: \(44,1219\circ \hbox {E}\) и \(-\,263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м по широте и долготе соответственно. Этот результат хорошо согласуется с положением, полученным по изображениям, сделанным узкоугольной камерой лунного разведывательного орбитального аппарата. Наконец, мы обсуждаем возможные улучшения нашего подхода, которые могут быть использованы для применения представленной концепции к высокоточному лунному позиционированию и исследованиям Луны.
Обсуждается применяемая стратегия обработки, а также факторы, ограничивающие наш подход. Мы подчеркиваем текущую точность таких наблюдений и точность оценок лунных параметров, т. е. координат лунного посадочного модуля, привязанных к Луне. Наш результат для положения спускаемого аппарата: \(44,1219\circ \hbox {E}\) и \(-\,263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м по широте и долготе соответственно. Этот результат хорошо согласуется с положением, полученным по изображениям, сделанным узкоугольной камерой лунного разведывательного орбитального аппарата. Наконец, мы обсуждаем возможные улучшения нашего подхода, которые могут быть использованы для применения представленной концепции к высокоточному лунному позиционированию и исследованиям Луны.
Введение
Интерферометрия со сверхдлинной базой (РСДБ) имеет долгую историю наблюдений за межпланетными космическими аппаратами (Дуев и др., 2012; Джонс и др., 2015), когда цели и близлежащие опорные радиоисточники наблюдаются в чередующемся порядке. Такие проекты направлены на улучшение планетарных эфемерид или проведение тестов общей теории относительности. Прогресс в космических науках и постоянный интерес к исследованию Солнечной системы также мотивировали многочисленные миссии с целью изучения Луны (Като и др., 2008; Эльфик и др., 2014). Недавним примером является китайская миссия «Чанъэ 3» (CE-3), начатая в конце 2013 года с развертывания посадочного модуля и марсохода в северо-западной части видимой стороны Луны (Ли и др. 2015). Посадочный модуль оснащен цифровым каналом связи в диапазоне X с возможностью передачи тонов дифференциальной односторонней дальности (DOR). После успешной посадки зондов CE-3 были предприняты различные попытки определить их относительное и абсолютное положение. Первое касается позиционирования марсохода по отношению к марсоходу. посадочный модуль с метровой точностью (Чжоу и др., 2015). Примерами последнего являются использование изображений фотограмметрии, полученных с китайского орбитального аппарата (Liu et al.
Такие проекты направлены на улучшение планетарных эфемерид или проведение тестов общей теории относительности. Прогресс в космических науках и постоянный интерес к исследованию Солнечной системы также мотивировали многочисленные миссии с целью изучения Луны (Като и др., 2008; Эльфик и др., 2014). Недавним примером является китайская миссия «Чанъэ 3» (CE-3), начатая в конце 2013 года с развертывания посадочного модуля и марсохода в северо-западной части видимой стороны Луны (Ли и др. 2015). Посадочный модуль оснащен цифровым каналом связи в диапазоне X с возможностью передачи тонов дифференциальной односторонней дальности (DOR). После успешной посадки зондов CE-3 были предприняты различные попытки определить их относительное и абсолютное положение. Первое касается позиционирования марсохода по отношению к марсоходу. посадочный модуль с метровой точностью (Чжоу и др., 2015). Примерами последнего являются использование изображений фотограмметрии, полученных с китайского орбитального аппарата (Liu et al. 2015b) или узкоугольной камерой (NAC) лунного разведывательного орбитального аппарата (LRO) (Tooley et al. 2010), что приводит к оценкам положения с точность лучше 20 м (Liu et al. 2015a). Определение положения на основе комбинации Унифицированного X-диапазона (UXB) (измерения дальности и скорости дальности) и РСДБ-наблюдений, выполненных с помощью китайских телескопов и продолжавшихся несколько часов, привело к погрешностям в несколько десятков метров (Li et al. , 2014; Цао и др., 2016). Дифференциальные РСДБ-наблюдения лунных целей с близлежащими калибраторными радиоисточниками могут быть проблематичными из-за углового размера Луны, подразумевающего угловые разнесения в несколько градусов и распространяющие, в этом случае, неопределенности положения эталонных источников в лунные параметры, пропорционально расстояние от цели до калибратора на небе.
2015b) или узкоугольной камерой (NAC) лунного разведывательного орбитального аппарата (LRO) (Tooley et al. 2010), что приводит к оценкам положения с точность лучше 20 м (Liu et al. 2015a). Определение положения на основе комбинации Унифицированного X-диапазона (UXB) (измерения дальности и скорости дальности) и РСДБ-наблюдений, выполненных с помощью китайских телескопов и продолжавшихся несколько часов, привело к погрешностям в несколько десятков метров (Li et al. , 2014; Цао и др., 2016). Дифференциальные РСДБ-наблюдения лунных целей с близлежащими калибраторными радиоисточниками могут быть проблематичными из-за углового размера Луны, подразумевающего угловые разнесения в несколько градусов и распространяющие, в этом случае, неопределенности положения эталонных источников в лунные параметры, пропорционально расстояние от цели до калибратора на небе.
Миссия CE-3 также предоставила прекрасную возможность наблюдать за посадочным модулем в абсолютном смысле, то есть с помощью стандартной геодезической РСДБ. Первые наблюдения были проведены уже в 2014 г. на паре европейских телескопов (Клопотек и др., 2017а). Впоследствии Комитет по программе наблюдений Международной РСДБ-службы геодезии и астрометрии (IVS) (Nothnagel et al. 2017) одобрил наблюдения посадочного модуля с увеличенным числом участвующих телескопов. Эта работа была реализована в рамках программы OCEL (Наблюдение за посадочным модулем Chang’e 3 с РСДБ), в рамках которой в 2014, 2015 и 2016 годах проводились геодезические РСДБ-наблюдения тонов DOR посадочного модуля в течение двенадцати 24-часовых сеансов и с глобальной сетью РСДБ. телескопы (Хаас и др., 2017 г.).
Первые наблюдения были проведены уже в 2014 г. на паре европейских телескопов (Клопотек и др., 2017а). Впоследствии Комитет по программе наблюдений Международной РСДБ-службы геодезии и астрометрии (IVS) (Nothnagel et al. 2017) одобрил наблюдения посадочного модуля с увеличенным числом участвующих телескопов. Эта работа была реализована в рамках программы OCEL (Наблюдение за посадочным модулем Chang’e 3 с РСДБ), в рамках которой в 2014, 2015 и 2016 годах проводились геодезические РСДБ-наблюдения тонов DOR посадочного модуля в течение двенадцати 24-часовых сеансов и с глобальной сетью РСДБ. телескопы (Хаас и др., 2017 г.).
В следующих разделах описана концепция геодезической РСДБ для наблюдений искусственных радиоисточников на лунной поверхности и представлены результаты анализа сеансов OCEL. Кроме того, мы предоставляем информацию о текущей точности таких новых наблюдений, а также о точности определенного положения посадочного модуля CE-3. Полученные значения сравниваются с результатами независимых исследований, а также наших расчетов по методу Монте-Карло. Мы также предоставляем информацию о ограничивающих факторах представленной концепции и обсуждаем предполагаемые возможности будущих улучшений.
Мы также предоставляем информацию о ограничивающих факторах представленной концепции и обсуждаем предполагаемые возможности будущих улучшений.
Данные и методы
Геодезическая РСДБ — это космический геодезический метод, использующий наблюдения очень удаленных естественных радиоисточников, например, квазизвездных объектов, обычно называемых квазарами. Подходящий геодезический радиоисточник характеризуется компактной (точечной) структурой, высокой плотностью потока и хорошо установленным положением на небе. Основной наблюдаемой, используемой в геодезической РСДБ, является разница во времени приема сигнала квазара между двумя радиотелескопами, образующими базовую линию. Такие наблюдения в настоящее время проводятся в диапазоне X и S (Sovers et al. 1998). Благодаря использованию множества квазаров и глобальной сети РСДБ-телескопов ценная информация об ориентации и вращении Земли относительно Земли была получена. можно получить доступ к инерциальной системе отсчета, определяемой каталогом четко определенных естественных источников радиоизлучения (Фей и др.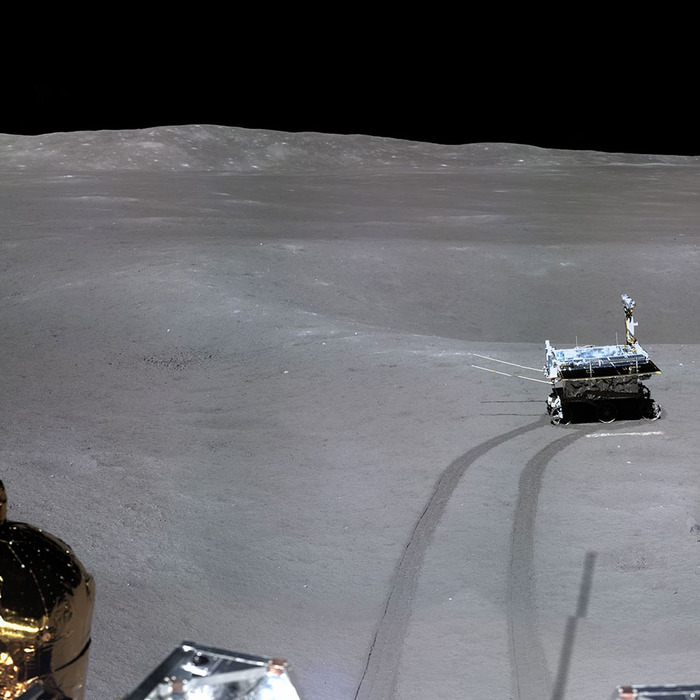 , 2009 г.).
, 2009 г.).
Комбинация наблюдений Луны и квазара
Концепция планирования сеансов OCEL подробно описана Haas et al. (2017) вместе с обширной информацией о характеристиках сигнала CE-3, а также о настройках частоты, использованных во время этих экспериментов. При условии, что Луна была видна в течение 24-часового сеанса хотя бы двумя из глобально распределенных телескопов сети, полный 24-часовой сеанс был разделен на 30-минутные блоки с наблюдениями. Эти блоки располагались в чередующемся порядке и включали либо только наблюдения квазаров (квазарные блоки), либо исключительно наблюдения посадочного модуля СЕ-3 всеми телескопами, которые могли видеть Луну (лунные блоки). Это показано на рис. 1. Кроме того, лунные блоки включали также наблюдения квазаров для телескопов без видимости Луны. Эта концепция планирования позволяет определять поведение водородных мазеров (называемых станционными часами) и параметры тропосферы на основе анализа блоков, содержащих только квазары.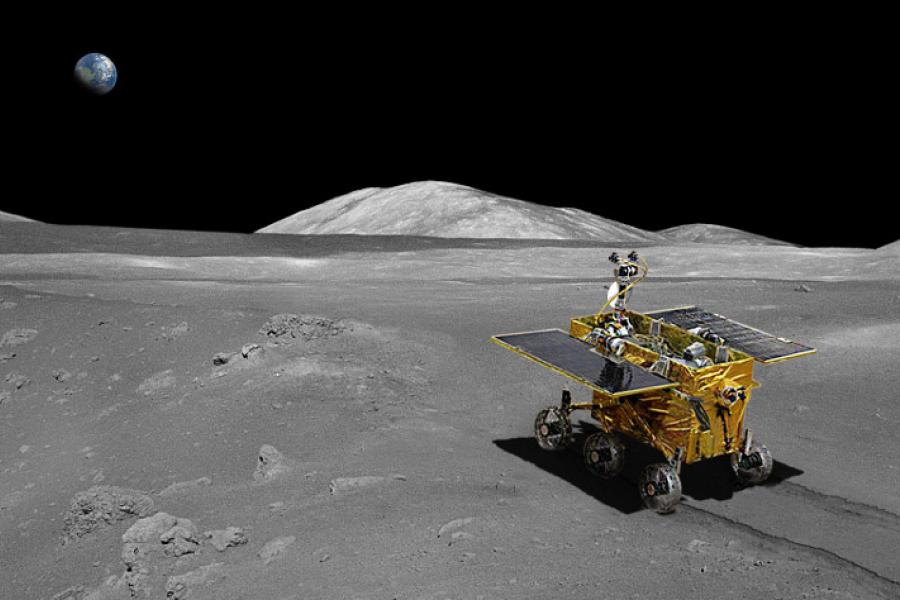 Эта информация впоследствии может быть использована для анализа лунных наблюдений в виде поправок к рассчитанным РСДБ-задержкам в каждую эпоху наблюдений.
Эта информация впоследствии может быть использована для анализа лунных наблюдений в виде поправок к рассчитанным РСДБ-задержкам в каждую эпоху наблюдений.
Рис. 1
Комбинация наблюдений квазара и Луны в сеансах OCEL. Сканирование с привязкой к задержке не является частью этого исследования
Полноразмерное изображение
Анализ лунных данных требует также компенсации эффектов распространения, вызванных ионосферой, поскольку эти наблюдения проводились с использованием одной полосы частот (полосы X). Такие ионосферные поправки можно рассчитать на основе глобальных карт ионосферы (GIM), которые предоставляются в формате обмена картами IONosphere (IONEX) (Schaer et al. 19).96). Ожидается, что для наблюдений Луны в X-диапазоне поправки на ионосферную задержку, полученные таким образом и примененные к РСДБ-анализу, будут иметь погрешность около 60 мм на базовой линии 8000 км (Секидо и др., 2003).
Обработка данных
Общая цепочка геодезической РСДБ-обработки состоит из нескольких этапов, включая корреляцию, посткорреляционное извлечение геодезических РСДБ-наблюдаемых и окончательный анализ данных для оценки целевых параметров.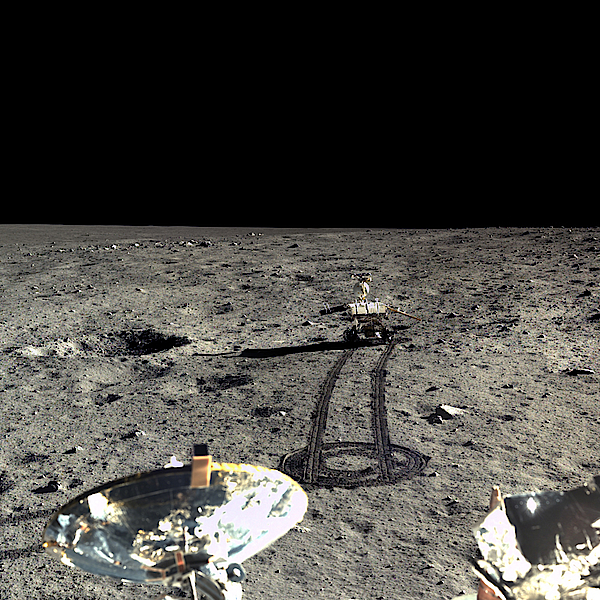 Из-за природы тонов DOR (четыре тона шириной двадцать кГц в отличие от непрерывного спектра сигналов квазара) и новизны предложенной концепции последние два этапа пришлось усовершенствовать, чтобы проводить наблюдения Луны в надежном режиме. способ. Принятая здесь стратегия обработки состоит из четырех этапов, проиллюстрирована и кратко описана на рис. 2. На этапе I наблюдения квазара и Луны были сопоставлены с DiFX 2.40 (Deller et al., 2011) с использованием 128 спектральных каналов на поддиапазон. . Шаг II касался извлечения геодезических РСДБ-наблюдаемых (многодиапазонных задержек) как для лунных данных, так и для квазарных. Это было выполнено с помощью Fourfit (Lonsdale 1996), программное обеспечение, обычно используемое в стандартном геодезическом посткорреляционном анализе. Единственная разница между обработкой квазарных и лунных данных в этом случае заключается в использовании опции полосы пропускания Fourfit, позволяющей ограничить спектры кросс-мощности окнами в один МГц для каждого из четырех тонов DOR, не включая несущую частоту.
Из-за природы тонов DOR (четыре тона шириной двадцать кГц в отличие от непрерывного спектра сигналов квазара) и новизны предложенной концепции последние два этапа пришлось усовершенствовать, чтобы проводить наблюдения Луны в надежном режиме. способ. Принятая здесь стратегия обработки состоит из четырех этапов, проиллюстрирована и кратко описана на рис. 2. На этапе I наблюдения квазара и Луны были сопоставлены с DiFX 2.40 (Deller et al., 2011) с использованием 128 спектральных каналов на поддиапазон. . Шаг II касался извлечения геодезических РСДБ-наблюдаемых (многодиапазонных задержек) как для лунных данных, так и для квазарных. Это было выполнено с помощью Fourfit (Lonsdale 1996), программное обеспечение, обычно используемое в стандартном геодезическом посткорреляционном анализе. Единственная разница между обработкой квазарных и лунных данных в этом случае заключается в использовании опции полосы пропускания Fourfit, позволяющей ограничить спектры кросс-мощности окнами в один МГц для каждого из четырех тонов DOR, не включая несущую частоту. 2/\nu\) близка к единице, что приводит к более реалистичным неопределенностям оцениваемых целевых параметров.
2/\nu\) близка к единице, что приводит к более реалистичным неопределенностям оцениваемых целевых параметров.
Рис. 2
Обработка наблюдений квазаров и лун по сеансам OCEL. На схеме показана четырехступенчатая цепочка обработки, используемая для получения лунных геодезических наблюдений РСДБ и определения лунных параметров. Все наблюдения коррелированы с использованием DiFX 2.40 (Deller et al. 2011). Поиск интерференционных полос выполняется с использованием Fourfit как для наблюдений квазаров, так и для наблюдений Луны. На этапе III функция \(\nu\)Решить (Болотин и др., 2014) используется для устранения неоднозначностей и получения ионосферных задержек для наблюдений квазаров. Оценка параметров выполняется на последнем этапе, где c5++ (Хобигер и др., 2010) используется как для наблюдений квазаров, так и для наблюдений Луны
Полноразмерное изображение
Далее мы сосредоточимся на результатах, полученных в результате анализа сеансов RD1510 и RD1601 (называемых OCEL08 и OCEL09).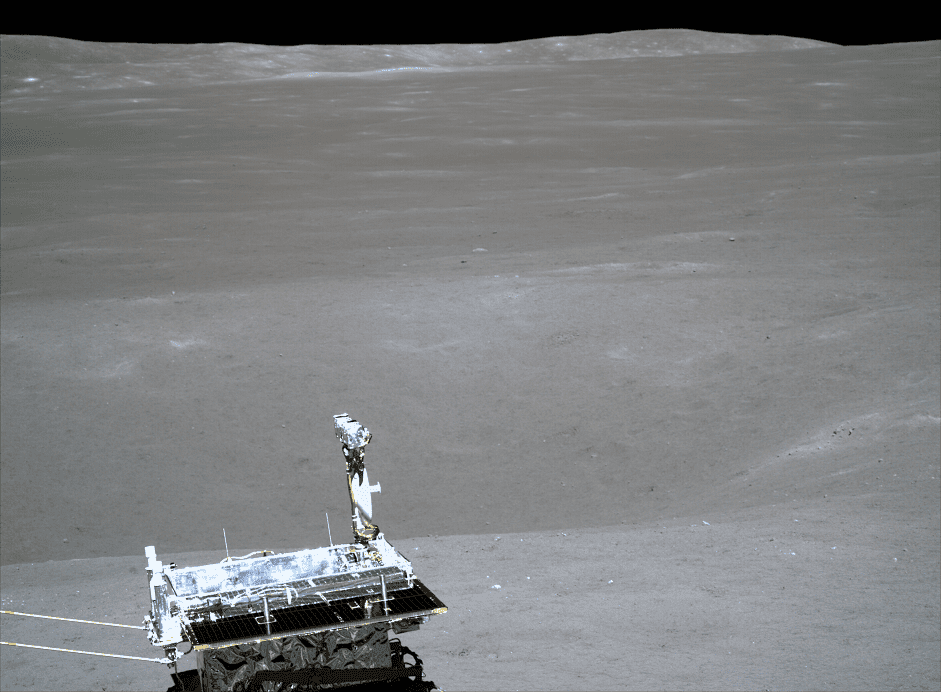 В предварительном исследовании (Klopotek et al. 2017b) эти два сеанса были признаны наиболее эффективными среди двенадцати сеансов OCEL. Остальные сеансы характеризуются худшей наблюдательной геометрией и на них повлияли различные проблемы, возникшие на этапах наблюдения и корреляции, что не позволило включить их в данное исследование. Это выделено в таблице 1 на основе репрезентативной группы сеансов.
В предварительном исследовании (Klopotek et al. 2017b) эти два сеанса были признаны наиболее эффективными среди двенадцати сеансов OCEL. Остальные сеансы характеризуются худшей наблюдательной геометрией и на них повлияли различные проблемы, возникшие на этапах наблюдения и корреляции, что не позволило включить их в данное исследование. Это выделено в таблице 1 на основе репрезентативной группы сеансов.
Таблица 1 Характеристики сеансов OCEL и проблемы, возникшие во время анализа, показанные для выбранных экспериментов
Полноразмерная таблица
РСДБ-моделирование задержки и оценка параметров
При рассмотрении наблюдений квазаров геодезический РСДБ-анализ следует хорошо зарекомендовавшему себя моделированию подход (Petit and Luzum 2010). Это, однако, не применимо к искусственным радиоисточникам на Луне, и традиционная модель задержки РСДБ должна быть заменена моделью, рассматриваемой для целей на конечном расстоянии (Дуев и др., 2012) и применяемой как для корреляции, так и для анализа данных ( Клопотек и др.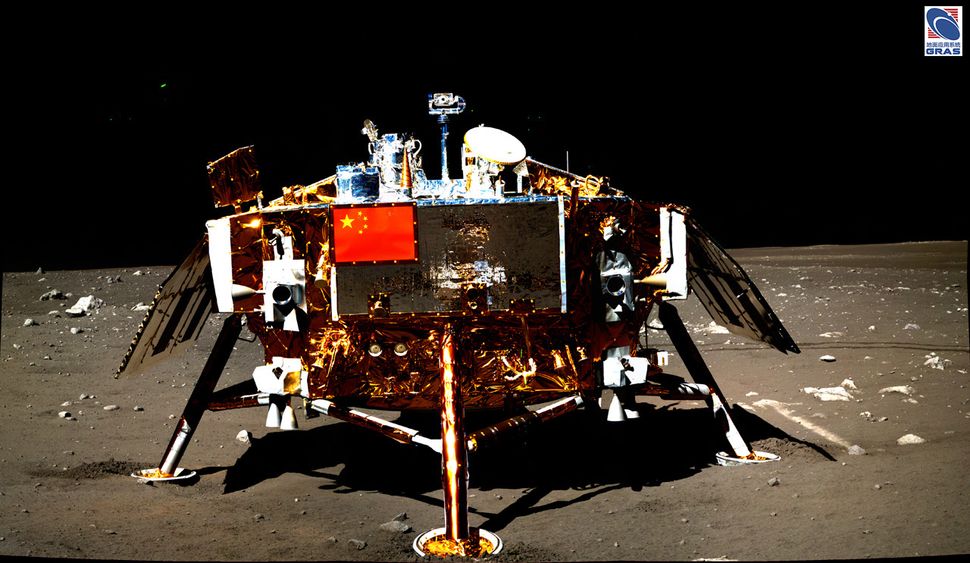 , 2017a; Хеллершмид и др., 2018).
, 2017a; Хеллершмид и др., 2018).
Положение посадочного модуля CE-3 определено по лунной широте и долготе (\(\phi _{lan},\lambda _{lan}\)) в фиксированной к Луне (среднеземной) системе отсчета (Archinal и др. 2011) и высота (\(H_{lan}\)) по отношению к эталонная сфера радиусом 1737,4 км. Таким образом, теоретическое моделирование задержки РСДБ опирается на JPL DE 421 (Фолкнер и др., 2009) для расчета барицентрических координат посадочного модуля CE-3 и включает периодические изменения положения лунного посадочного модуля, вызванные твердыми лунными приливами. Из-за характера РСДБ-наблюдений, т. е. плохой чувствительности в направлении прямой видимости, \(H_{lan}\) необходимо ограничить хорошо известным априорным значением (с \(\sigma = \pm\ ) 10 м), поскольку только РСДБ-наблюдения не позволяют надежно отделить все компоненты положения посадочного модуля (Клопотек и др., 2018). Тем не менее, наблюдения за дальностью (или скоростью дальности) можно было бы использовать в будущем, чтобы избежать неправильной априорной высоты посадочного модуля, искажающей горизонтальные оценки, путем введения дополнительного смещения положения.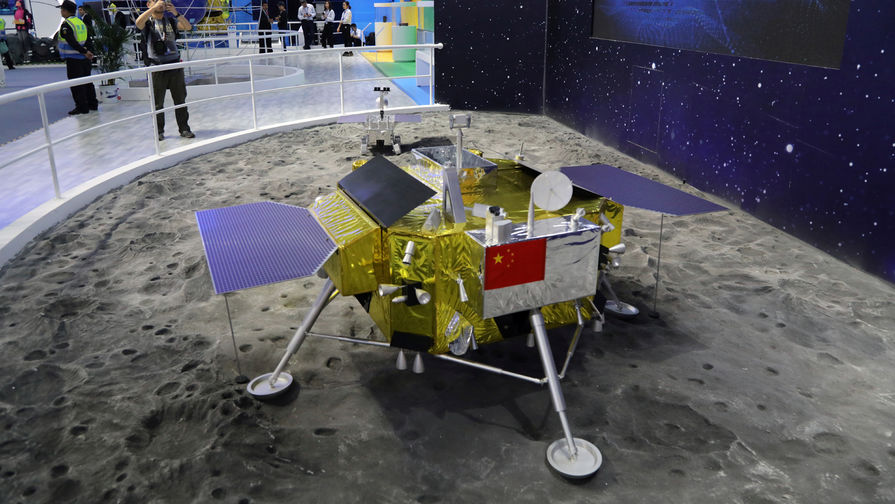 \circ \hbox {E}\) и \(-26 {37,6}\) м, где последнее соответствует значению, указанному Cao et al. (2016) . Начальное горизонтальное положение посадочного модуля явно неверно, но оно использовалось в начале итеративной оценки и для проверки правильности нашего подхода к анализу. Часы станции и параметры тропосферы были оценены в решении только для квазаров на этапе IVa (см. рис. 2) и использованы в решении только для луны на этапе IVb. Оценки зенитных влажных задержек (ZWD) из решения только для квазара хорошо согласуются с соответствующими результатами анализа наблюдений с совместно расположенных станций GNSS. Помимо ZWD, горизонтальных тропосферных градиентов и часов станций, другие наземные параметры, такие как положения телескопа VLBI, выраженные в ITRF2014 (Altamimi et al. 2016), а также параметры ориентации Земли (серия EOP IERS 14 C04 (Bizouard and Gambis 2018)) не оценивались, а фиксировались к их априорным значениям. Информация о параметризации мешающих параметров приведена в таблице 2.
\circ \hbox {E}\) и \(-26 {37,6}\) м, где последнее соответствует значению, указанному Cao et al. (2016) . Начальное горизонтальное положение посадочного модуля явно неверно, но оно использовалось в начале итеративной оценки и для проверки правильности нашего подхода к анализу. Часы станции и параметры тропосферы были оценены в решении только для квазаров на этапе IVa (см. рис. 2) и использованы в решении только для луны на этапе IVb. Оценки зенитных влажных задержек (ZWD) из решения только для квазара хорошо согласуются с соответствующими результатами анализа наблюдений с совместно расположенных станций GNSS. Помимо ZWD, горизонтальных тропосферных градиентов и часов станций, другие наземные параметры, такие как положения телескопа VLBI, выраженные в ITRF2014 (Altamimi et al. 2016), а также параметры ориентации Земли (серия EOP IERS 14 C04 (Bizouard and Gambis 2018)) не оценивались, а фиксировались к их априорным значениям. Информация о параметризации мешающих параметров приведена в таблице 2.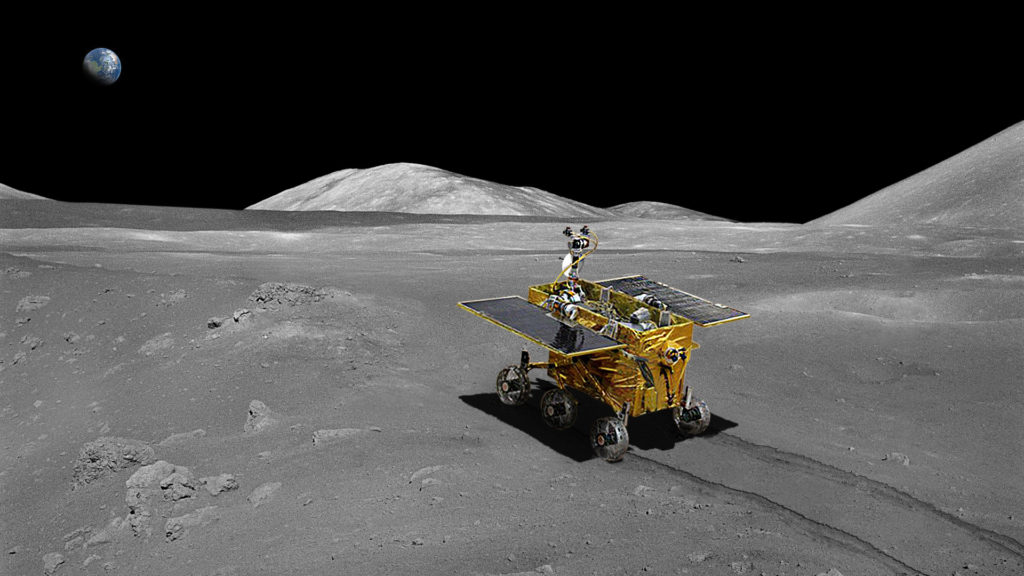 Кроме того, любая неопределенность в значениях вертикального полного электронного содержания (VTEC) из GIM распространяется на возможную разницу между задержками ионосферы, полученными с помощью IONEX, и геодезическими данными, полученными с помощью VLBI, в виде высоты над уровнем моря. зависимая ошибка. Для данных о квазарах погрешности задержки, связанные с ионосферными поправками на основе GIM, составляют около 0,11 м и 0,09м для OCEL08 и OCEL09 для базовой линии 8000 км соответственно. Это было решено на шаге IVb путем ограниченной оценки (с \(\sigma =~\pm\) 3 единицы TEC) смещений VTEC (по одному на станцию в сутки) вместе с компонентами положения посадочного модуля. На том же этапе одно дополнительное смещение часов на станцию оценивалось как постоянный параметр, чтобы справляться с неоднозначностями, потенциальными проблемами с абсолютной синхронизацией (Hellerschmied et al. 2018), а также с поправкой на неизвестное постоянное смещение, вызванное инструментальными задержками в точке X.
Кроме того, любая неопределенность в значениях вертикального полного электронного содержания (VTEC) из GIM распространяется на возможную разницу между задержками ионосферы, полученными с помощью IONEX, и геодезическими данными, полученными с помощью VLBI, в виде высоты над уровнем моря. зависимая ошибка. Для данных о квазарах погрешности задержки, связанные с ионосферными поправками на основе GIM, составляют около 0,11 м и 0,09м для OCEL08 и OCEL09 для базовой линии 8000 км соответственно. Это было решено на шаге IVb путем ограниченной оценки (с \(\sigma =~\pm\) 3 единицы TEC) смещений VTEC (по одному на станцию в сутки) вместе с компонентами положения посадочного модуля. На том же этапе одно дополнительное смещение часов на станцию оценивалось как постоянный параметр, чтобы справляться с неоднозначностями, потенциальными проблемами с абсолютной синхронизацией (Hellerschmied et al. 2018), а также с поправкой на неизвестное постоянное смещение, вызванное инструментальными задержками в точке X. группа. Последнее обычно поглощается моделью часов при оценке геодезических параметров в случае двухчастотных данных о квазарах (Секидо и др., 2003; Хобигер и др., 2006). Решения итеративного метода наименьших квадратов сошлись с WRMS невязок, равных 0,26 м и 0,29.\circ \hbox {E}\) и \(-263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м для \(\phi _{lan}\) и \( \lambda _{lan}\) соответственно. Эти координаты представляют собой средневзвешенное положение посадочного модуля, рассчитанное на основе индивидуальных оценок OCEL08 и OCEL09. В терминах эллипса ошибки горизонтального положения 1 — \(\сигма\) полученные неопределенности могут быть переведены в 3,0 м и 10,5 м для малой и большой полуосей соответственно.
группа. Последнее обычно поглощается моделью часов при оценке геодезических параметров в случае двухчастотных данных о квазарах (Секидо и др., 2003; Хобигер и др., 2006). Решения итеративного метода наименьших квадратов сошлись с WRMS невязок, равных 0,26 м и 0,29.\circ \hbox {E}\) и \(-263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м для \(\phi _{lan}\) и \( \lambda _{lan}\) соответственно. Эти координаты представляют собой средневзвешенное положение посадочного модуля, рассчитанное на основе индивидуальных оценок OCEL08 и OCEL09. В терминах эллипса ошибки горизонтального положения 1 — \(\сигма\) полученные неопределенности могут быть переведены в 3,0 м и 10,5 м для малой и большой полуосей соответственно.
Помимо реальных наблюдений, был проведен ряд симуляций методом Монте-Карло с той же параметризацией и геометрией наблюдения, что и при анализе OCEL08 и OCEL09, чтобы подтвердить неопределенность полученных оценок местоположения и количественно оценить влияние потенциальных систематических эффектов. . При моделировании методом Монте-Карло наблюдаемая геодезическая РСДБ включает расчетную задержку РСДБ и вклад трех основных источников ошибок, т. е. тропосферной турбулентности, эталонных часов и теплового шума (Клопотек и др., 2018). Точность смоделированных РСДБ-наблюдений посадочного модуля можно контролировать с помощью базового (гауссовского) шума, генерируемого в нашем случае со стандартным отклонением гауссовского генератора случайных чисел, установленным на 0,20 м и 0,24 м, чтобы получить WRMS после подбора остатков, полученных в результате анализа OCEL08 и OCEL09. Анализ обеих смоделированных геометрий наблюдений OCEL дал эллипсы ошибок горизонтального положения с аналогичной формой, ориентацией и большими полуосями, но с малыми полуосями, меньшими по крайней мере в два раза по сравнению с анализом реальных наблюдений. Это указывает на наличие некоторых неустановленных эффектов, вносящих дополнительную неопределенность в основном в продольном направлении.
. При моделировании методом Монте-Карло наблюдаемая геодезическая РСДБ включает расчетную задержку РСДБ и вклад трех основных источников ошибок, т. е. тропосферной турбулентности, эталонных часов и теплового шума (Клопотек и др., 2018). Точность смоделированных РСДБ-наблюдений посадочного модуля можно контролировать с помощью базового (гауссовского) шума, генерируемого в нашем случае со стандартным отклонением гауссовского генератора случайных чисел, установленным на 0,20 м и 0,24 м, чтобы получить WRMS после подбора остатков, полученных в результате анализа OCEL08 и OCEL09. Анализ обеих смоделированных геометрий наблюдений OCEL дал эллипсы ошибок горизонтального положения с аналогичной формой, ориентацией и большими полуосями, но с малыми полуосями, меньшими по крайней мере в два раза по сравнению с анализом реальных наблюдений. Это указывает на наличие некоторых неустановленных эффектов, вносящих дополнительную неопределенность в основном в продольном направлении.
Полученные координаты также сравнивались с результатами других исследований, в которых использовались разные подходы для определения положения посадочного модуля «Чанъэ 3», см. рис. 3.
рис. 3.
Сравнение с предыдущими результатами
Оценки положения, полученные на основе сеансов OCEL, близки к оценкам, указанным Liu et al. (2015a) (обозначается LRO NAC), см. рис. 3. На лунной поверхности разница между нашими результатами и LRO NAC составляет около 6 м. Форма и величина эллипсов ошибок, связанных с сеансами OCEL (включая наши симуляции Монте-Карло), можно объяснить главным образом вкладом дополнительных смещений часов, определенных вместе с координатами посадочного модуля. Эти две группы параметров сильно коррелированы (с коэффициентами корреляции Пирсона до 0,75), и большая часть неопределенности положения в северо-западном направлении может быть связана с этим эффектом. Помимо шума наблюдения и источников ошибок, связанных с методикой, таких как тропосферная турбулентность или ионосфера, необходимо иметь в виду, что разница между положением спускаемого аппарата по LRO NAC и положением антенны (и ее фазовым центром, оцененным и отнесенным в нашем случае), который передает сигналы DOR, малоизвестен и не учитывался в нашем исследовании, поскольку нынешняя чувствительность измерения не позволяет идентифицировать этот эффект.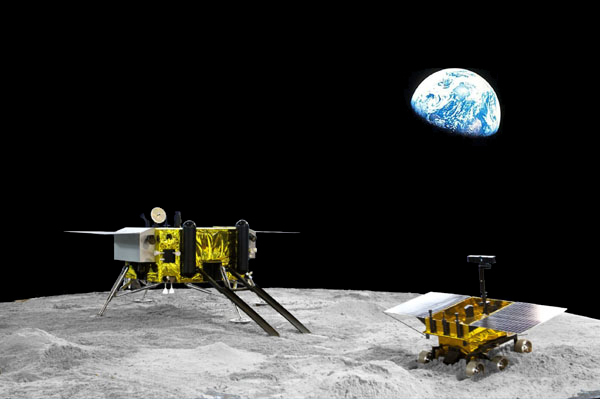
Рис. 3
Сравнение положений посадочного модуля CE-3 из различных исследований. Оранжевый треугольник относится к положению, определенному путем объединения четырнадцати изображений, сделанных узкоугольной камерой LRO (Liu et al. 2015a). Синий квадрат показывает координаты, полученные с помощью измерений РСДБ и UXB (Ли и др., 2014). В обоих случаях соответствующие ошибки определения местоположения (20 м и 50 м) соответствуют неопределенностям, указанным в Liu et al. (2015a) и Ли и соавт. (2014). Розовые точки вместе с эллипсами ошибок положения 1-\(\сигма\) изображают результаты, полученные в ходе отдельных сеансов OCEL, использованных в этом исследовании. Красная точка (с эллипсом ошибки 1-\(\сигма\)) представляет средневзвешенное положение посадочного модуля на основе OCEL08 и OCEL09.
Полноразмерное изображение
Одним из факторов, обуславливающих разные уровни неопределенности между нашими оценками и результатами, указанными Li et al. (2014) (упоминается как VLBI+UXB) может быть связано с геометрией наблюдения и продолжительностью сеанса. Ли и соавт. (2014) использовали всего несколько часов наблюдений только с помощью китайских телескопов. В случае 24-часовых сеансов OCEL межконтинентальные базовые линии были полезны для повышения чувствительности геодезической РСДБ для определения положения этой лунной цели (Клопотек и др., 2017b). По сравнению с РСДБ+UXB учет тропосферных и ионосферных задержек привел к явному улучшению оценок координат и уменьшению их формальных погрешностей. 9\circ \hbox {E}\) и \(-263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м по широте и долготе соответственно. Полученное положение отличается примерно на 6 м от результатов LRO NAC.
(2014) (упоминается как VLBI+UXB) может быть связано с геометрией наблюдения и продолжительностью сеанса. Ли и соавт. (2014) использовали всего несколько часов наблюдений только с помощью китайских телескопов. В случае 24-часовых сеансов OCEL межконтинентальные базовые линии были полезны для повышения чувствительности геодезической РСДБ для определения положения этой лунной цели (Клопотек и др., 2017b). По сравнению с РСДБ+UXB учет тропосферных и ионосферных задержек привел к явному улучшению оценок координат и уменьшению их формальных погрешностей. 9\circ \hbox {E}\) и \(-263{7,3}\) м, с погрешностями горизонтального положения на лунной поверхности 8,9 м и 4,5 м по широте и долготе соответственно. Полученное положение отличается примерно на 6 м от результатов LRO NAC.
Сеансы OCEL предоставили первые сведения о глобальных геодезических РСДБ-наблюдениях за искусственными лунными радиоисточниками. Основываясь на полученных знаниях и возникших технических трудностях, организация подобных программ в будущем была бы полезной, чтобы лучше понять эту новую концепцию наблюдений и в полной мере воспользоваться ее истинным потенциалом (Клопотек и др.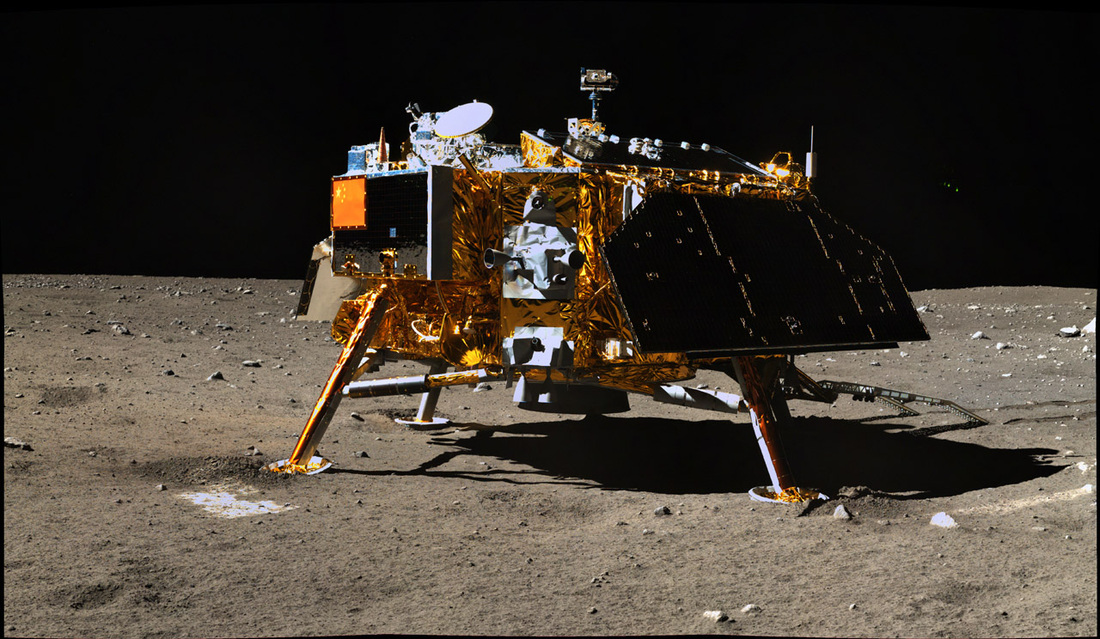 , 2018). Дальнейшие шаги касаются улучшения определения лунных параметров с помощью автоматизированного и оптимизированного планирования, а также усовершенствования посткорреляционного анализа лунных наблюдений. Ожидается, что введение двухчастотных наблюдений может улучшить характеристики позиционирования, поскольку ионосферные ошибки будут дополнительно уменьшены, и можно будет избежать оценок смещений VTEC, а также дополнительных смещений часов. Кроме того, наблюдения таких целей в РСДБ-системе следующего поколения (Нилль и др., 2018 г.) выиграют от повышения плотности наблюдения как квазарных, так и лунных источников, лучшего контроля тропосферной турбулентности, а также значительного снижения шума наблюдений на РСДБ-станциях ( Клопотек и др., 2018).
, 2018). Дальнейшие шаги касаются улучшения определения лунных параметров с помощью автоматизированного и оптимизированного планирования, а также усовершенствования посткорреляционного анализа лунных наблюдений. Ожидается, что введение двухчастотных наблюдений может улучшить характеристики позиционирования, поскольку ионосферные ошибки будут дополнительно уменьшены, и можно будет избежать оценок смещений VTEC, а также дополнительных смещений часов. Кроме того, наблюдения таких целей в РСДБ-системе следующего поколения (Нилль и др., 2018 г.) выиграют от повышения плотности наблюдения как квазарных, так и лунных источников, лучшего контроля тропосферной турбулентности, а также значительного снижения шума наблюдений на РСДБ-станциях ( Клопотек и др., 2018).
Будущая работа должна также включать в себя моделирование чувствительности измерений геодезической РСДБ для определения параметров, связанных с динамикой Луны, или даже совместного размещения РСДБ с другими космическими геодезическими методами через цели на Луне. Благодаря повышенной точности измерений, а также уменьшению ошибок, связанных с тропосферой и ионосферой, предлагаемая концепция может предоставить ученым метод, который потенциально может дополнить лунную лазерную дальнометрию, например, при определении координат искусственных оптических и радиоцелей, опережая к лучшему знанию лунного вращения, а также уменьшению корреляции между оценочными координатами и другими лунными параметрами (Хофманн и др., 2018). Наблюдения за искусственными радиоисточниками на Луне, обработанные подходом, описанным в этом исследовании, могут быть включены в регулярные графики ИВС практически без усилий и без дополнительного или специального наземного оборудования, позволяющего ежедневно наблюдать за такими лунными целями. .
Благодаря повышенной точности измерений, а также уменьшению ошибок, связанных с тропосферой и ионосферой, предлагаемая концепция может предоставить ученым метод, который потенциально может дополнить лунную лазерную дальнометрию, например, при определении координат искусственных оптических и радиоцелей, опережая к лучшему знанию лунного вращения, а также уменьшению корреляции между оценочными координатами и другими лунными параметрами (Хофманн и др., 2018). Наблюдения за искусственными радиоисточниками на Луне, обработанные подходом, описанным в этом исследовании, могут быть включены в регулярные графики ИВС практически без усилий и без дополнительного или специального наземного оборудования, позволяющего ежедневно наблюдать за такими лунными целями. .
Сокращения
- РСДБ:
интерферометрия со сверхдлинной базой
- CE-3:
Чанъэ 3
- NAC:
узкоугольная камера
- ИВС:
международная служба РСДБ для геодезии и астрометрии
- ОСЕЛ:
наблюдение за спускаемым аппаратом «Чанъэ 3» с помощью VLBI
- МРО:
лунный разведывательный орбитальный аппарат
- ДОР:
дифференциальный односторонний диапазон
- ZWD:
Zenith мокрая задержка
- UXB:
унифицированный X-диапазон
- ГИМ:
глобальные карты ионосферы
- IONEX:
Формат обмена картами IONosphere
- VTEC:
полное электронное содержание по вертикали
- Лаборатория реактивного движения DE:
эфемериды разработки лаборатории реактивного движения
- WRMS:
среднеквадратичное взвешенное значение
- Распродажа:
Параметры ориентации Земли
- IERS:
международная служба вращения Земли и систем отсчета
- Звонок по телефону:
радиочастотные помехи
- ITRF:
международная наземная система отсчета
Ссылки
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: новая версия Международной наземной системы отсчета, моделирующая нелинейные движения станций.
J Geophys Res Solid Earth 121: 6109–6131Артикул
Google ученый
Archinal BA, A’Hearn MF, Bowell E, Conrad A, Consolmagno GJ, Courtin R, Fukushima T, Hestroffer D, Hilton JL, Krasinsky GA, Neumann G, Oberst J, Seidelmann PK, Stooke P, Tholen DJ , Thomas PC, Williams IP (2011) Отчет рабочей группы IAU по картографическим координатам и элементам вращения: 2009. Celest Mech Dyn Astron 109(2):101–135
Статья
Google ученый
Бизуар С., Гамбис Д. (2018) Международная служба систем вращения и отсчета Параметры ориентации Земли EOP (IERS) 14 C04. ftp://hpiers.obspm.fr/iers/eop/eopc04/. Доступ 25 5 2018
Болотин С., Бавер К., Гипсон Дж., Гордон Д., Макмиллан Д. (2014) Программное обеспечение для анализа данных РСДБ ν Решить: ход разработки и планы на будущее. В: Бавер К.Д., Беренд Д., Армстронг К.Л. (ред.) Материалы общего собрания IVS 2014.
Science Press, Пекин, стр. 253–257 9.0003Google ученый
Цао Дж., Чжан Ю., Ху С., Хуан Ю., Чен М. (2016) Анализ точного позиционирования и точности мягкой посадки лунного посадочного модуля CE-3. Geomat Inf Sci Wuhan Univ 41(2):274 (на китайском языке)
Google ученый
Деллер А.Т., Брискен В.Ф., Филлипс С.Дж., Морган Дж., Алеф В., Каппалло Р., Мидделберг Э., Ромни Дж., Роттманн Х., Тингей С.Дж., Уэйт Р. (2011) DiFX-2: более гибкий, эффективный, надежный и мощный программный коррелятор. Опубликовано Astron Soc Pac 123(9)01):275
Артикул
Google ученый
Дуев Д.А., Калвс М.Г., Погребенко С.В., Гурвиц Л.И., Симо Г., Бахамон Т.Б. (2012) РСДБ космического аппарата и доплеровское слежение: алгоритмы и реализация. Astron Astrophys 541:A43
Артикул
Google ученый
Elphic RC, Delory GT, Hine BP, Mahaffy PR, Horanyi M, Colaprete A, Benna M, Noble SK (2014) Миссия по исследованию лунной атмосферы и пылевой среды.
Space Sci Rev. 185(1):3–25Артикул
Google ученый
Фей А.Л., Гордон Д., Джейкобс К.С. (редакторы) (2009) Вторая реализация международной небесной системы отсчета с помощью интерферометрии со сверхдлинной базой, представленная от имени рабочей группы IERS/IVS. IERS Technical Note 35, Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main
Folkner WM, Williams JG, Boggs DH (2009) Планетарные и лунные эфемериды DE 421. Отчет о ходе работы IPN 42–178
Хаас Р., Халсиг С., Хан С., Иддинк А., Джарон Ф., Ла Порта Л., Ловелл Дж., Нейдхардт А., Нотнагель А., Плётц С., Тан Г., Чжан З. (2017) Наблюдение за Чанг-3 Посадочный модуль с РСДБ (OCEL): технические настройки и первые результаты. В: Нотнагель А., Джарон Ф. (ред.) Материалы первого международного семинара по РСДБ-наблюдениям за целями ближнего поля, 5–6 октября 2016 г., Schriftenreihe des Inst. ф. Геодази у. Геоинформация, том 54, ISSN 1864-1113, Бонн, том 54, стр.
41–64Хеллершмид А., МакКаллум Л., МакКаллум Дж., Сан Дж., Бём Дж., Цао Дж. (2018) Наблюдение за APOD с помощью массива РСДБ AuScope. Датчики 18(5):1587
Артикул
Google ученый
Hobiger T, Otsubo T (2017) Комбинация космических геодезических методов на уровне наблюдений с c5++: общие мешающие параметры и взвешивание данных. В: van Dam T (ed) REFAG 2014. Springer, Cham, стр. 31–37
Google ученый
Hobiger T, Kondo T, Schuh H (2006) Интерферометрия со сверхдлинной базой как инструмент для исследования ионосферы. Radio Sci 41(1):1–10
Статья
Google ученый
Hobiger T, Otsubo T, Sekido M, Gotoh T, Kubooka T, Takiguchi H (2010) Полностью автоматизированный РСДБ-анализ с c5++ для сверхбыстрого определения UT1. Земля Планеты Космос 62(12):933–937
Статья
Google ученый
Хофманн Ф.
, Бискупек Л., Мюллер Дж. (2018) Вклад в эталонные системы от Lunar Laser Ranging с использованием модели анализа IfE. J Geod 92(9):975–987Статья
Google ученый
Джонс Д.Л., Фолкнер В.М., Якобсон Р.А., Джейкобс К.С., Дхаван В., Ромни Дж., Фомалонт Э. (2015) Астрометрия Кассини с помощью VLBA для улучшения эфемерид Сатурна. Astron J 149:28
Артикул
Google ученый
Като М., Сасаки С., Танака К., Иидзима Ю., Такидзава Ю. (2008) Японская лунная миссия SELENE: научные цели и текущее состояние. Adv Space Res 42(2):294–300
Статья
Google ученый
Клопотек Г., Хобигер Т., Хаас Р. (2017a) Реализация моделей задержки ближнего поля РСДБ в программном обеспечении для анализа c5++. В: Нотнагель А., Джарон Ф. (ред.) Материалы первого международного семинара по РСДБ-наблюдениям за целями ближнего поля, 5–6 октября 2016 г.
, Schriftenreihe des Inst. ф. Геодази у. Геоинформация, том 54, ISSN 1864-1113, Бонн, том 54, стр. 29–33Клопотек Г., Хобигер Т., Хаас Р. (2017b) Лунные наблюдения и геодезическая РСДБ — имитационное исследование. В: Хаас Р., Элгеред Г. (ред.) Труды 23-го рабочего совещания Европейской группы РСДБ по геодезии и астрометрии, Технологический университет Чалмерса, Гетеборг, стр. 122–126
Клопотек Г., Хобигер Т., Хаас Р. (2018) Геодезическая РСДБ с искусственным радиоисточником на Луне: имитационное исследование. J Geod 92(5):457–469
Статья
Google ученый
Li C, Liu J, Ren X, Zuo W, Tan X, Wen W, Li H, Mu L, Su Y, Zhang H, Yan J, Ouyang Z (2015) Обзор миссии Chang’e 3. Space Sci Rev 190(1):85–101
Статья
Google ученый
Li P, Huang Y, Chang S, Hu X, Liu Q, Zheng X, Wang G, Zheng W, Fan M (2014) Позиционирование посадочного модуля и вездехода Chang’E-3 с использованием наземных наблюдений.
Chin Sci Bull 59(32):3162 (на китайском языке)Статья
Google ученый
Лю Б., Ди К., Ван Б., Тан Г., Сюй Б., Чжан Л., Лю З. (2015a) Позиционирование и проверка точности спускаемого аппарата Chang’E-3 на основе нескольких изображений LRO NAC. Chin Sci Bull 60(28–29):2750 (на китайском языке)
Статья
Google ученый
Liu Z, Di K, Peng M, Wan W, Liu B, Li L, Yu T, Wang B, Zhou J, Chen H (2015b) Высокоточное картирование места посадки и локализация вездехода для Chang’e-3 миссия. Sci China Phys Mech Astron 58 (1): 1–11 (на китайском языке)
Google ученый
Lonsdale CJ (1996) Система постобработки обсерватории стога сена (HOPS). ftp://gemini.haystack.mit.edu/pub/hops/what_is_hops. Доступ 25 6 2018
Ниэлл А., Барретт Дж., Бернс А., Каппалло Р., Кори Б., Дером М., Эккерт С., Элосеги П.
, МакВиртер Р., Порье М., Раджагопалан Г., Роджерс А.Е., Рущик С., СуХу Дж., Титус М., Уитни А., Беренд Д., Болотин С., Гипсон Дж., Гордон Д., Химвич Э., Петраченко Б. (2018) Демонстрация широкополосной интерферометрической системы со сверхдлинной базой: новый инструмент для высокоточной космической геодезии. Радио Наука 53 (10): 1269–1291Артикул
Google ученый
Нотнагель А., Арц Т., Беренд Д., Малкин З. (2017) Международная служба РСДБ для геодезии и астрометрии — предоставление высококачественной продукции и начало наблюдений следующего поколения. J Geod 91(7):711–721
Статья
Google ученый
Petit G, Luzum B, (eds) (2010) IERS Conventions, (2010) IERS Technical Note 36. Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main
Шаер С., Бейтлер Г., Ротачер М., Спрингер Т.А. (1996) Ежедневные глобальные карты ионосферы, основанные на данных GPS о фазе несущей, регулярно производимых CODE.
В: Neilan RE, Van Scoy PA, Zumberge JF (eds) Proceedings of the IGS Analysis Center Workshop, International GNSS ServiceSekido M, Kondo T, Kawai E, Imae M (2003) Оценка ионосферного TEC на основе GPS карту путем сравнения с данными РСДБ. Radio Sci 38(4)
Sovers OJ, Fanselow JL, Jacobs CS (1998) Астрометрия и геодезия с радиоинтерферометрией: эксперименты, модели, результаты. Rev Mod Phys 70(4):1393–1454
Статья
Google ученый
Тули К.Р., Хоутон М.Б., Сэйлор Р.С., Педди С., Эверетт Д.Ф., Бейкер С.Л., Сафди К.Н. (2010) Миссия лунного разведывательного орбитального аппарата и конструкция космического корабля. Space Sci Rev 150(1):23–62
Статья
Google ученый
Zhou H, Li H, Dong G (2015) Определение относительного положения между посадочным модулем Chang’E-3 и марсоходом с использованием фазовой привязки по лучу. Sci China Inf Sci 58 (9):1–10
Google ученый
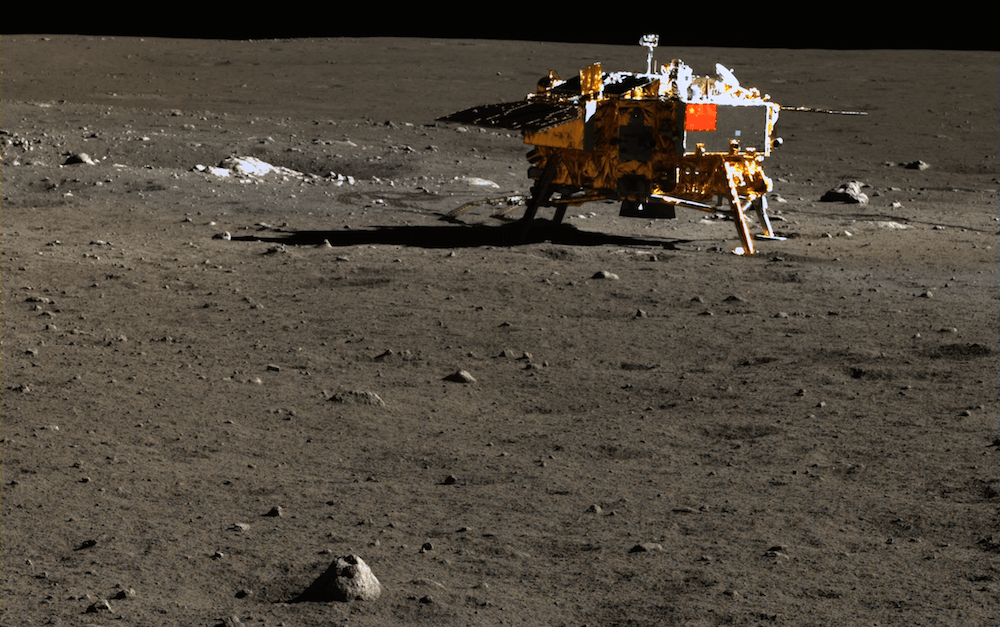 J Geophys Res Solid Earth 121: 6109–6131
J Geophys Res Solid Earth 121: 6109–6131 Science Press, Пекин, стр. 253–257 9.0003
Science Press, Пекин, стр. 253–257 9.0003 Space Sci Rev. 185(1):3–25
Space Sci Rev. 185(1):3–25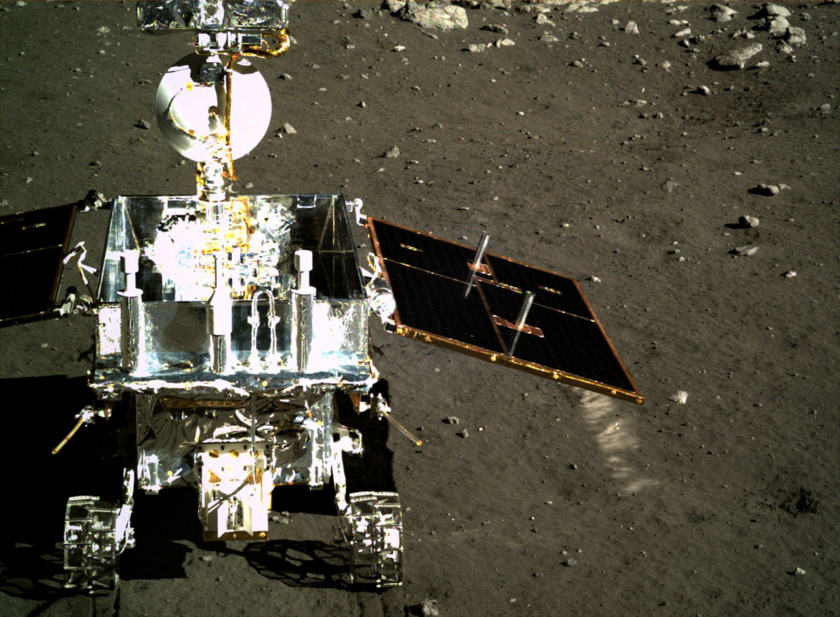 41–64
41–64 , Бискупек Л., Мюллер Дж. (2018) Вклад в эталонные системы от Lunar Laser Ranging с использованием модели анализа IfE. J Geod 92(9):975–987
, Бискупек Л., Мюллер Дж. (2018) Вклад в эталонные системы от Lunar Laser Ranging с использованием модели анализа IfE. J Geod 92(9):975–987 , Schriftenreihe des Inst. ф. Геодази у. Геоинформация, том 54, ISSN 1864-1113, Бонн, том 54, стр. 29–33
, Schriftenreihe des Inst. ф. Геодази у. Геоинформация, том 54, ISSN 1864-1113, Бонн, том 54, стр. 29–33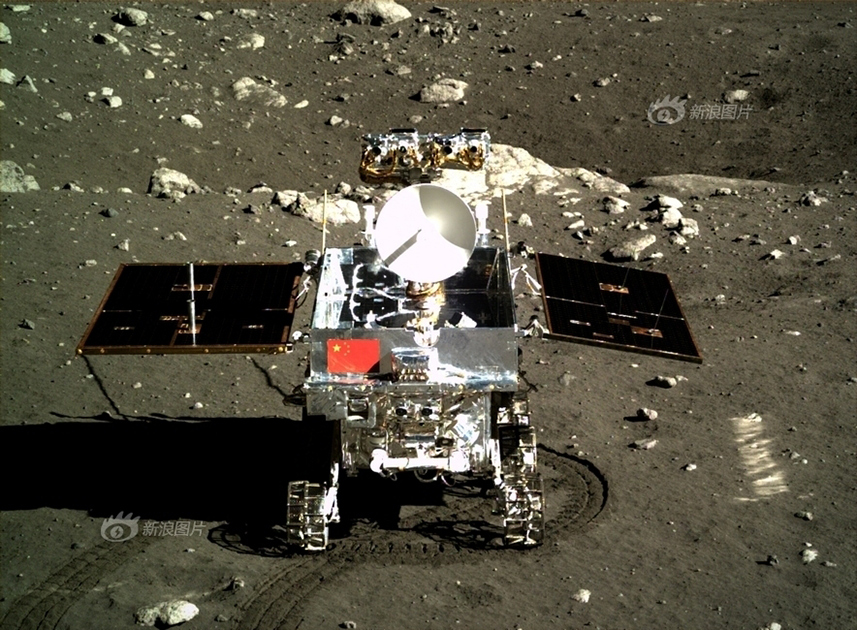 Chin Sci Bull 59(32):3162 (на китайском языке)
Chin Sci Bull 59(32):3162 (на китайском языке) , МакВиртер Р., Порье М., Раджагопалан Г., Роджерс А.Е., Рущик С., СуХу Дж., Титус М., Уитни А., Беренд Д., Болотин С., Гипсон Дж., Гордон Д., Химвич Э., Петраченко Б. (2018) Демонстрация широкополосной интерферометрической системы со сверхдлинной базой: новый инструмент для высокоточной космической геодезии. Радио Наука 53 (10): 1269–1291
, МакВиртер Р., Порье М., Раджагопалан Г., Роджерс А.Е., Рущик С., СуХу Дж., Титус М., Уитни А., Беренд Д., Болотин С., Гипсон Дж., Гордон Д., Химвич Э., Петраченко Б. (2018) Демонстрация широкополосной интерферометрической системы со сверхдлинной базой: новый инструмент для высокоточной космической геодезии. Радио Наука 53 (10): 1269–1291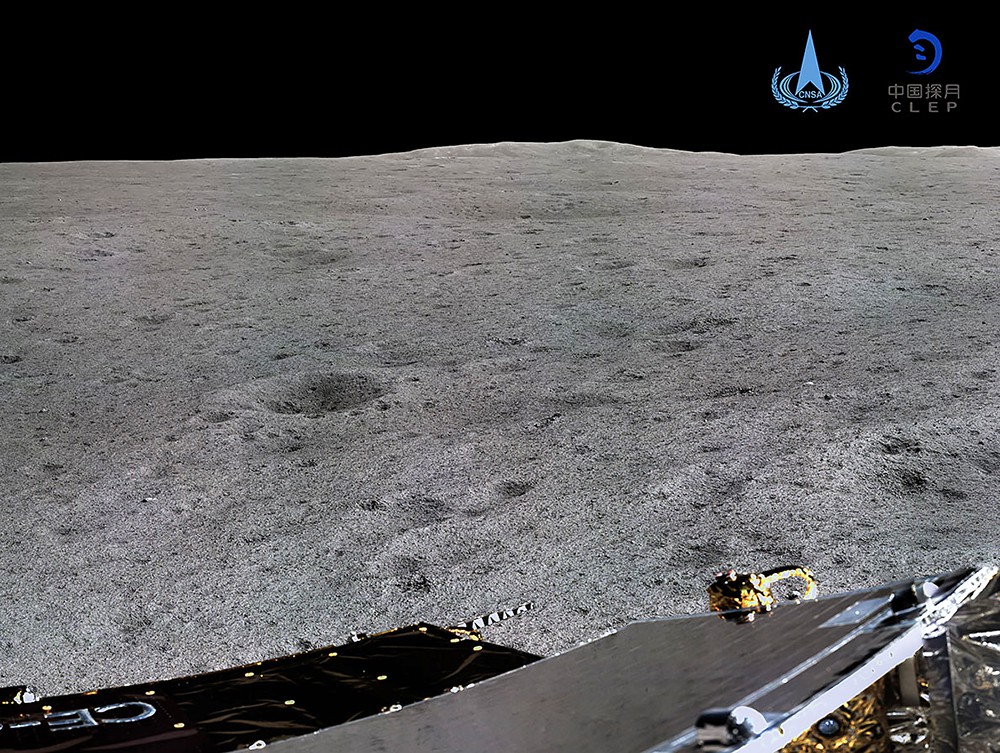 В: Neilan RE, Van Scoy PA, Zumberge JF (eds) Proceedings of the IGS Analysis Center Workshop, International GNSS Service
В: Neilan RE, Van Scoy PA, Zumberge JF (eds) Proceedings of the IGS Analysis Center Workshop, International GNSS ServiceЗагрузить ссылки
Вклад авторов
RH, ANe и CP выполнили важные начальные тесты для подготовки к сессиям OCEL. RH запланировал сеансы OCEL. LLP и FJ сопоставили все данные, и полоса соответствовала наблюдениям квазара (LLP) и луны (FJ). ANo, FJ, ZZ и SH помогли с интерпретацией необработанных лунных данных. GK и TH проанализировали оба набора данных и определили лунные параметры. Г.К. написал рукопись и создал рисунки. TH и RH руководили GK и вместе с другими авторами помогали улучшить рукопись. Все авторы прочитали и одобрили окончательный вариант рукописи.
RH запланировал сеансы OCEL. LLP и FJ сопоставили все данные, и полоса соответствовала наблюдениям квазара (LLP) и луны (FJ). ANo, FJ, ZZ и SH помогли с интерпретацией необработанных лунных данных. GK и TH проанализировали оба набора данных и определили лунные параметры. Г.К. написал рукопись и создал рисунки. TH и RH руководили GK и вместе с другими авторами помогали улучшить рукопись. Все авторы прочитали и одобрили окончательный вариант рукописи.
Благодарности
Вышеупомянутые сайты IVS и китайских РСДБ-сетей признательны за их участие в этом исследовательском проекте. Мы благодарим рецензентов за их конструктивные комментарии.
Конкурирующие интересы
Авторы заявляют об отсутствии конкурирующих интересов.
Доступность данных и материалов
Наборы данных, использованные в ходе текущего исследования, можно получить у соответствующего автора по обоснованному запросу.
Финансирование
Неприменимо.
Примечание издателя
Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.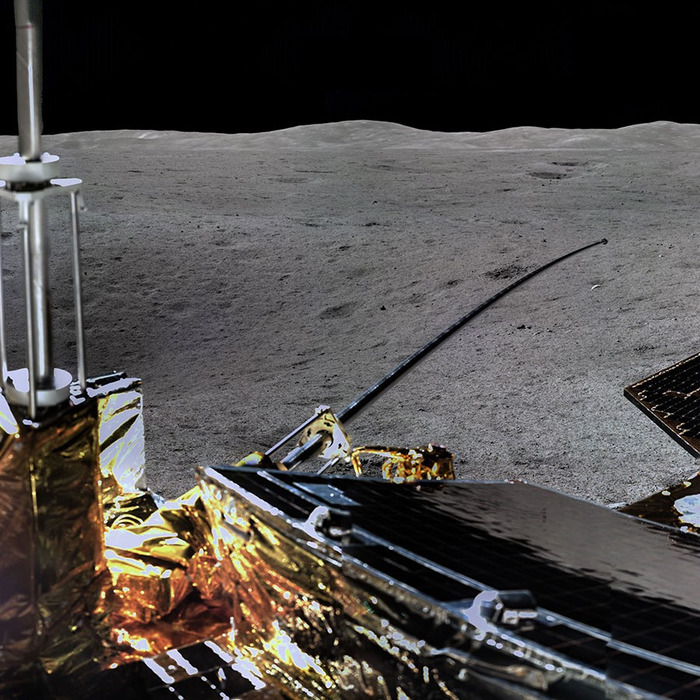
Author information
Authors and Affiliations
Department of Space, Earth and Environment, Onsala Space Observatory, Chalmers University of Technology, Onsala, Sweden
Grzegorz Klopotek & Rüdiger Haas
Institute of Navigation, University of Штутгарт, Штутгарт, Германия
Thomas Hobiger
Institute of Geodesy and Geoinformation, University of Bonn, Bonn, Germany
Frédéric Jaron, Laura La Porta, Axel Nothnagel & Zhongkai Zhang
Reichert GmbH, Bonn, Germany
Laura La Porta Пекин, Китай0003
Александр Нейдхардт
Геодезическая обсерватория Wettzell, Федеральное агентство по картографии и геодезии, Bad Kötzting, Germany
Christian Plötz
Автор
Авторы
Автор
. в
в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Академия
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Автор, ответственный за корреспонденцию
Гжегож Клопотек.