Содержание
человекоподобные роботы — Будущее на vc.ru
Как менялись андроиды последние 500 лет.
7749
просмотров
1495 год
Первый человекоподобный механизм разработал изобретатель Леонардо да Винчи. На каркас робота он надел броню и запрограммировал на имитацию человеческих движений: встать и присесть, двигать руками и шеей. Кроме того, робот обладал анатомически правильным строением челюсти.
1774 год
Швейцарский часовщик Пьер Жаке-До, его сыновья Анри-Луи и Жан-Фредерик Лесшо сконструировали три кукольных автомата: музыканта, художника и писателя. Экспонаты хранятся в Женевском музее искусства и истории и до сих пор функционируют. Их считают одними из отдалённых предков современных компьютеров.
1928 год
Ветеран Первой мировой войны капитан Уильям Ричардс и авиатехник Алан Реффел построили первого британского робота «Эрика». Его создали для открытия выставки Общества модельных инженеров в лондонском Королевском садоводческом зале. На мероприятии он поднялся, поклонился и дал четырёхминутную вступительную речь. Он управлялся двумя людьми, а голос получен в прямом эфире по радиосигналу.
На мероприятии он поднялся, поклонился и дал четырёхминутную вступительную речь. Он управлялся двумя людьми, а голос получен в прямом эфире по радиосигналу.
1941–1942 годы
Исаак Азимов сформулировал три закона робототехники в научной фантастике.
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат первому закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит первому или второму законам.
1948 год
Норберт Винер сформулировал принципы кибернетики — основы практической робототехники.
В этом же году General Electric создала первого промышленного робота для работы на атомном реакторе. Его особенность — наличие обратной связи. Оператор наблюдал за перемещениями и чувствовал силу, которую развивал захват манипулятора для более точного управления механизмом.
1969 год
Сербский инженер Миомир Вукобратович и его сотрудники в Институте автоматики и телесвязи имени Михаила Пупина построили антропоморфный экзоскелет на пневматическом приводе для помощи парализованным людям.
1970 год
В Университете Васэда в Токио создали первого электронно управляемого человекоподобного антропоморфного робота Wabot-1. Он состоял из системы управления конечностями, зрением и речью. Он умел общаться с человеком на японском языке и измерять расстояние и направление к объектам, используя внешние рецепторы, искусственные уши, глаза и рот.
Также робот мог ходить, хватать и передвигать предметы руками с помощью тактильных датчиков. Устройство обладало интеллектом полуторагодовалого ребёнка.
Wabot-1
1974 год
Вукобратович совместно с коллегами из НИИ механики МГУ имени Михаила Ломоносова и Центрального государственного института ортопедии и травматологии сконструировали и протестировали первый активный экзоскелет с электромеханическими двигателями.
1980 год
Университет Васэда представил второе поколение своего робота — Wabot-2. Он мог играть на пианино. Игра на музыкальном инструменты была настроена как интеллектуальная задача, которую приходилось выполнять роботу. Так как для выполнения этой задачи требуется человекоподобный интеллект и ловкость, разработку определили как специализированного робота, а не универсального, как Wabot-1.
Wabot-2 умеет разговаривать с человеком, читать обычную музыкальную партитуру и играть мелодии средней сложности на электронном органе. Также он может сопровождать человека, когда он слушает пение.
1985 год
Японский конгломерат Hitachi разработал двуногого робота WHL-11. Он мог ходить по плоской поверхности со скоростью 10 секунд на каждый шаг и умел поворачиваться.
1986 год
Honda разработала семь двуногих роботов, которые маркировались от E0 до E6. Разработка серии продолжилась до 1993 года. Это были экспериментальные роботы, которые превратились в серию P.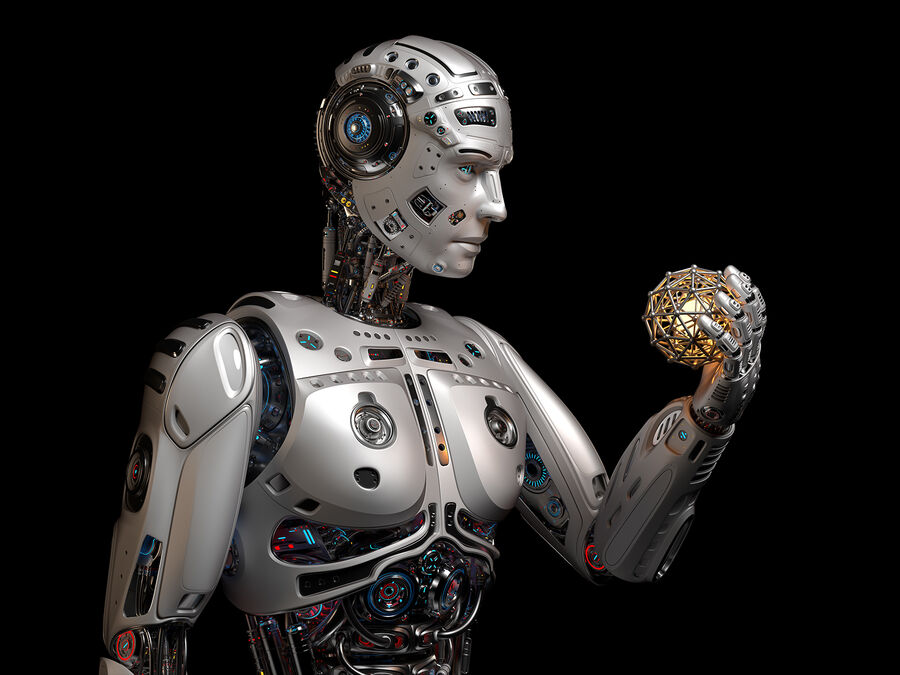 Она, в свою очередь, была промежуточным этапом в создании робота Asimo и проекта Humanoid Robotics Project.
Она, в свою очередь, была промежуточным этапом в создании робота Asimo и проекта Humanoid Robotics Project.
1988 год
В Тихоокеанской северо-западной национальной лаборатории создали полномасштабного антропоморфного робота Мэнни. Он не умел ходить, но мог ползать и обладал искусственной дыхательной системой для имитации дыхания.
1995 год
В Университете Васэда разработали робота Hadaly для изучения связи между человеком и роботом. Он состоит из трёх подсистем: голова-глаз, система голосового управления для прослушивания и выступлений на японском языке и подсистема правления движениями. В этом же году они представили двуногого ходового робота размером с человека Wabian.
2000 год
Honda создала одного из самых известных в мире роботов — Asimo. Это многофункциональный помощник, который призван помочь людям с плохой мобильностью. Он умеет распознавать объекты, жесты, звуки и лица, позволяя взаимодействовать с людьми. Последнюю версию робота выпустили в 2014 году.
Последнюю версию робота выпустили в 2014 году.
История развития Asimo
2001 год
Японский ИТ-производитель Fujitsu реализовал коммерческого человекоподобного робота HOAP, который стал первым свободно программируемым роботом. Его целевая аудитория — учёные и исследователи робототехники.
2002 год
Sony объявила о разработке робота Sony Dream Robot. Его способности значительно превосходили возможности предыдущих двуногих роботов. Он передвигался по лестницам, обходил препятствия и сопротивлялся попыткам опрокинуть его. Более того, при случайном падении он вставал обратно.
2003 год
В Техническом университете Мюнхена построили робота Johnnie. Его главная цель — добиться быстрой, динамически стабильной человекоподобной походки.
2004 год
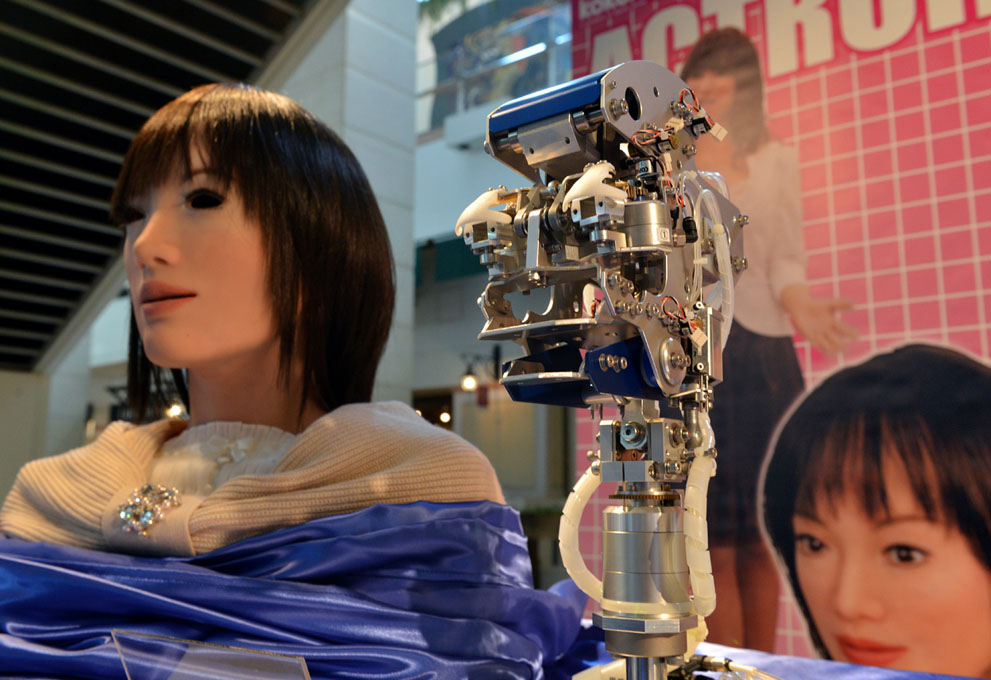
Осакский университет совместно с компанией Kokoro создали робота Actroid с реалистичной силиконовой кожей. Это первый пример правдоподобного человекоподобного робота, похожего на устройства из научной фантастики. Робот умеет распознавать и обрабатывать речь, отвечать на вопросы. Благодаря искусственному интеллекту устройство реагирует на прикосновения.
Робот умеет распознавать и обрабатывать речь, отвечать на вопросы. Благодаря искусственному интеллекту устройство реагирует на прикосновения.
2006 год
Aldebaran Robotics во Франции представила автономного программируемого человекоподобного робота NAO с открытым исходным кодом. Его используют университеты в качестве исследовательской платформы и образовательного инструмента.
REEM-A стал первым полностью автономным европейским двуногим человекоподобным роботом, предназначенным для игры в шахматы с двигателем Hydra Chess.
2005 год
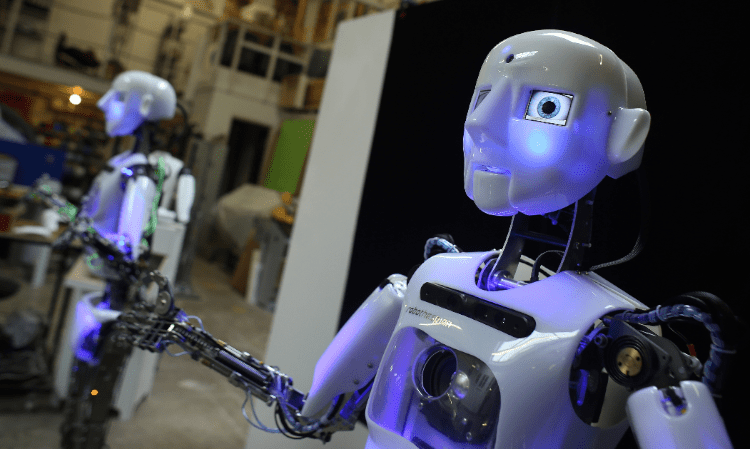
Британская компания Engineered Arts создала роботизированного актёра RoboThespian. Его миссия — просвещать, общаться, взаимодействовать и развлекать.
2006 год
Корейский институт науки и техники создал роботов Mahru и Ahra. В отличие от предшественников, они могут загружать искусственный интеллект из сети.
2007 год
TOSY Robotics JSC представила игрового робота TOPIO для игры в настольный теннис.
Университет Васэда создал робота Twendy-One для оказания помощи на дому.
Канадский робототехник любитель создал робота Aiko. Он умеет разговаривать, читать, распознавать предметы и цвета и решать математические задачи. Это первый робот, который может имитировать боль и реагировать на физические раздражители.
2008 год
В Массачусетском технологическом институте создали мобильного робота Nexi. Это мобильный-способный-социальный робот. Он передвигается на колёсах, а руки разделены на плечо, предплечье и кисть, благодаря чему он может передвигать предметы до 5 кг. Робот может двигать глазами, бровями, веками и ртом.
2009 год
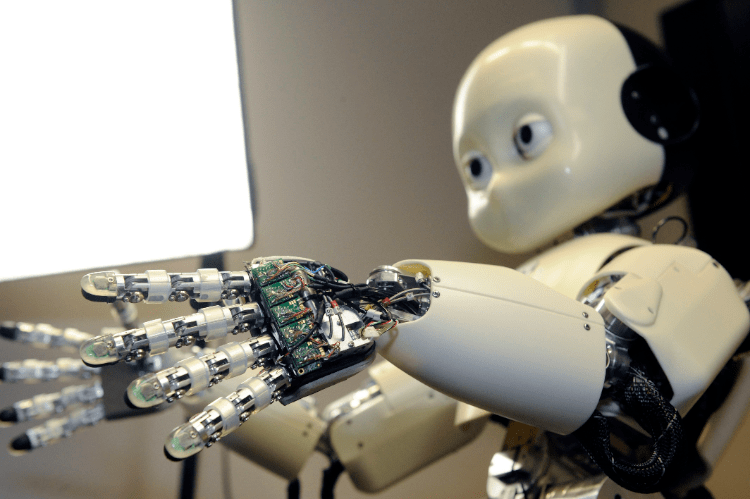
Итальянский институт технологий представил робота iCub с открытым исходным кодом для исследования человеческого познания и искусственного интеллекта.
2010 год
NASA и General Motors показали Robonaut 2. Задача робота — помочь на МКС астронавтам в их повседневной работе внутри и снаружи станции. В 2011 году робота успешно запустили на МКС.
В 2011 году робота успешно запустили на МКС.
2012 год
Французский скульптор Гаэль Ланжевин разработал робота InMoov. Он состоит из компонентов, напечатанных на 3D-принтере, и управляется микроконтроллерами Arduino. Его особенность в том, что его легко напечатать с помощью небольшого принтера (12x12x12 см), а системные файлы распространяются по лицензии Creative Commons. Поэтому робота используют университеты, лаборатории и любители робототехники.
Демо-видео InMoov в 2015 году
2013 год
Директор института медиаинноваций Наньянского технологического университета в Сингапуре Надя Тальманн создала социального робота Надин. Это автономный робот, который учится при каждой встрече нового человека.
Надин приветствует людей, сохраняет зрительный контакт, и запоминает разговоры. Робот может общаться на нескольких языках, имитировать эмоции в жестах и на лице, а также распознавать людей, с которыми общался раньше. Надин помнит факты и события, связанные с каждым знакомым ей человеком.
Надин помнит факты и события, связанные с каждым знакомым ей человеком.
В этом же году Boston Dynamics разработала человекоподобного робота Atlas. Его дизайн и производство контролировалось агентством Министерства обороны США. По словам разработчиков, робот предназначен для поисково-спасательных операций. Сейчас он считается одним самых развитых роботов в мире. Atlas умеет прыгать, ходить, преодолевать полосу препятствий и переносить вещи. Также он первым научился делать сальто.
Обновлённое видео 2018 года, где Atlas занимается паркуром
2014 год
Японская компания SoftBank Robotics представила полугуманоидного робота Pepper, разработанного с возможностью считывать эмоции благодаря способности анализировать выражения и голос. Сейчас Pepper используется в роли администратора в нескольких офисах в Великобритании и может идентифицировать посетителей благодаря технологии распознавания лиц, отправлять оповещения для организаторов встреч, и предлагать напитки.
На выставке японской электроники Toshiba представила робота Aiko Chihira, который создан для работы на информационной стенде в токийском торговом центре, где помогает клиентам ориентироваться в магазине. Устройство говорит на японском и на языке жестов и имитирует движения человека.
2015 год
Гонконгская компания Hanson Robotics разработала робота Софию. Её спроектировали по актрисе Одри Хепберн. Устройство получило известность благодаря человекоподобному внешнему виду и поведению.
Робот обладает искусственным интеллектом, функциями обработки визуальной информации и технологией распознавания лиц. Он умеет имитировать человеческие жесты, мимику, отвечать на вопросы и беседовать на простые заранее определённые темы.
Робот София в эфире программы «Вечерний Ургант» в 2017 году
2016 год
Команда Стэнфордского университета во главе с профессором информатики Уссама Хатибом представила подводного человекоподобного робота с тактильной обратной связью OceanOne. Устройство предназначено для глубоководных исследований. Робот оснащен бимануальными руками, стереоскопическим зрением, восемью двигателями для управления и датчиками, объединяющими силу и тактильную обратную связь.
Устройство предназначено для глубоководных исследований. Робот оснащен бимануальными руками, стереоскопическим зрением, восемью двигателями для управления и датчиками, объединяющими силу и тактильную обратную связь.
2017 год
Испанская компания PAL Robotics разработала робота Talos, который помогает «работать над физически сложными и точными задачами, выполняемыми в агрессивных или неудобных промышленных условиях». То есть робот сможет не только исследовать поверхность, как многие устройства, но и перейдёт к выполнению полезных задач.
3DNews Аналитика IT-байки IT-байки: человекообразные роботы или ро… Самое интересное в новостях Терминатор – детская сказочка по сравнению с современными достижениями робототехники. К некоторым андроидам уже вполне уместно обращение на «Вы». Посвящается
Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER. Материалы по теме Постоянный URL: https://3dnews.ru/186685 Теги: ⇣ Комментарии |
 Только зачем всё это?
Только зачем всё это? И только представьте себе, какие интересные дела творятся сейчас с открытиями трансурановых элементов, экспериментами с невидимостью и телепортацией, нанотехнологиями…
И только представьте себе, какие интересные дела творятся сейчас с открытиями трансурановых элементов, экспериментами с невидимостью и телепортацией, нанотехнологиями…
 Тем более что, совсем недавно в азиатской части нашей планеты случилось несколько неординарных событий в этой отрасли.
Тем более что, совсем недавно в азиатской части нашей планеты случилось несколько неординарных событий в этой отрасли.

 Сейчас множество различных роботов представляют собой специализированные устройства, запрограммированные на одну операцию. Так, iRobot Roomba представляет собой интеллектуальный пылесос, а Robotics RL1000 Robomower по цене $1800 с док-станцией – автоматического газонокосильщика. Большинство специализированных роботов всего лишь стилизовано под домашних робозверюшек или человекообразных существ, не более того. В перспективе, одна из тенденций роботостроения, скорее всего, выльется в создание персональных универсальных роботов – помощников по хозяйству, которые возьмут на себя выполнение всевозможной домашней рутины – от подметания полов и дойки коров до распыления инсектицидов и выполнения функций медсестры при операциях.
Сейчас множество различных роботов представляют собой специализированные устройства, запрограммированные на одну операцию. Так, iRobot Roomba представляет собой интеллектуальный пылесос, а Robotics RL1000 Robomower по цене $1800 с док-станцией – автоматического газонокосильщика. Большинство специализированных роботов всего лишь стилизовано под домашних робозверюшек или человекообразных существ, не более того. В перспективе, одна из тенденций роботостроения, скорее всего, выльется в создание персональных универсальных роботов – помощников по хозяйству, которые возьмут на себя выполнение всевозможной домашней рутины – от подметания полов и дойки коров до распыления инсектицидов и выполнения функций медсестры при операциях.  К 2009 году – всего через три года, в США будет продано порядка 4,5 млн. роботов, специализирующихся в помощи домохозяйкам. К 2010 году продажи роботов-помощников и «персональных роботов» превысят уровень $17 млрд., а в 2025 году эти продажи составят уже около $52 млрд. К 2040 большинство семей уже будет иметь домашнего робота или по крайней мере, планировать такую покупку в ближайшее время.
К 2009 году – всего через три года, в США будет продано порядка 4,5 млн. роботов, специализирующихся в помощи домохозяйкам. К 2010 году продажи роботов-помощников и «персональных роботов» превысят уровень $17 млрд., а в 2025 году эти продажи составят уже около $52 млрд. К 2040 большинство семей уже будет иметь домашнего робота или по крайней мере, планировать такую покупку в ближайшее время. Действительно, в то время ещё не существовало ни приличной элементной базы для реализации впечатляющих вычислительных мощностей, не были определены хоть какие-то мало-мальски универсальные индустриальные стандарты на компоненты ПК. Фактически, робототехника лишь задалась рядом фундаментальных вопросов, без разрешения которых роботы не смогут стать универсальными помощниками, пригодными для «самостоятельного» или хотя бы более-менее автономного «существования».
Действительно, в то время ещё не существовало ни приличной элементной базы для реализации впечатляющих вычислительных мощностей, не были определены хоть какие-то мало-мальски универсальные индустриальные стандарты на компоненты ПК. Фактически, робототехника лишь задалась рядом фундаментальных вопросов, без разрешения которых роботы не смогут стать универсальными помощниками, пригодными для «самостоятельного» или хотя бы более-менее автономного «существования».
 Или тот же робот-солдат, которому достаточно иметь крепкую броню, точные манипуляторы для сапёрных работ, гусеницы для бездорожья, крылья для разведки, присоски для диверсий да прецизионный GPS-приёмник – зачем ему человеческий облик? Робота-охранника и вовсе можно интегрировать в банковское оборудование или домашнюю систему мониторинга, ему самостоятельное тело и вовсе не положено. Таких примеров можно придумать множество.
Или тот же робот-солдат, которому достаточно иметь крепкую броню, точные манипуляторы для сапёрных работ, гусеницы для бездорожья, крылья для разведки, присоски для диверсий да прецизионный GPS-приёмник – зачем ему человеческий облик? Робота-охранника и вовсе можно интегрировать в банковское оборудование или домашнюю систему мониторинга, ему самостоятельное тело и вовсе не положено. Таких примеров можно придумать множество.
 Вот здесь можно посмотреть роскошный ролик с действом обучения. Всего лишь за $300 тысяч этот робот на батарейках научит вас танцевать вальс, внимательно следя за вашими ошибочными и нечёткими движениями. Это андроид или ещё нет? Вряд ли…
Вот здесь можно посмотреть роскошный ролик с действом обучения. Всего лишь за $300 тысяч этот робот на батарейках научит вас танцевать вальс, внимательно следя за вашими ошибочными и нечёткими движениями. Это андроид или ещё нет? Вряд ли…
 Основные элементы системы расположены в «голове» робота – именно там находятся современные камеры-глаза и система восприятия и анализа окружающей обстановки и преград, позволяющая роботу самостоятельно выбирать и корректировать направление движения. Во время презентации «присутствовало» три компонента HRP-2, связанных беспроводной сетью, которые «общались » друг с другом, при этом один принимал команды, другой выполнял задание по извлечению банки сока, третий помогал в корректировке трассы. В перспективе разработчики собираются внедрить всю систему в единое «тело». Вот вам видеоролик с этой презентации.
Основные элементы системы расположены в «голове» робота – именно там находятся современные камеры-глаза и система восприятия и анализа окружающей обстановки и преград, позволяющая роботу самостоятельно выбирать и корректировать направление движения. Во время презентации «присутствовало» три компонента HRP-2, связанных беспроводной сетью, которые «общались » друг с другом, при этом один принимал команды, другой выполнял задание по извлечению банки сока, третий помогал в корректировке трассы. В перспективе разработчики собираются внедрить всю систему в единое «тело». Вот вам видеоролик с этой презентации.
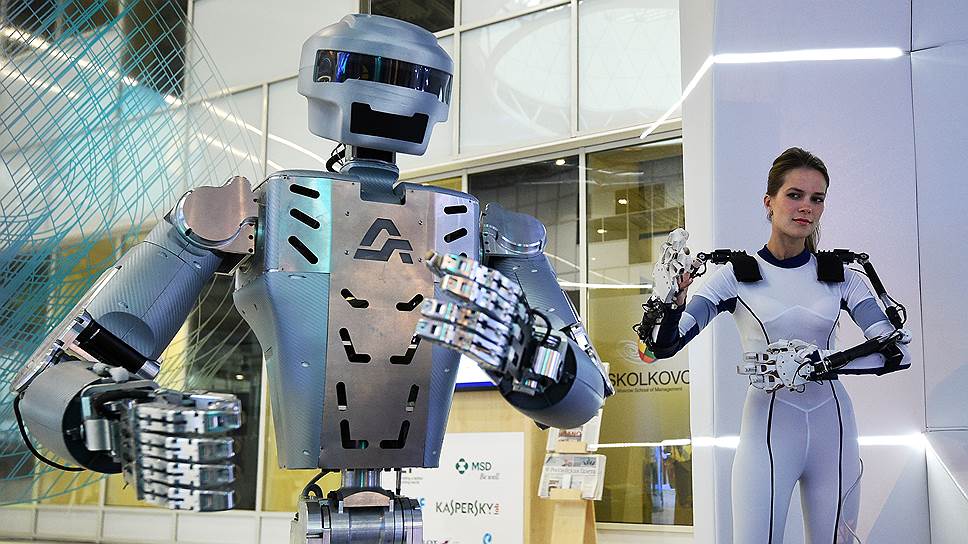
 Искусственная кожа с возможностью передачи мимики от профессора Маено, впервые представленная на 24-й ежегодной конференции Robotics Society of Japan (RSJ), составлена из 1 см «дермиса» из эластичного силикона, покрытого тончайшим 0,2 мм слоем «эпидермиса» из прочного уретана. Бесчисленное количество сверхминиатюрных выемок, вытравленных в уретановом эпидермисе с соблюдением «сотовой» 6-угольной геометрии, превращают искусственную кожу в потрясающе реалистичную текстуру. Что интересно, при проведении тестирования десять из 12 испытуемых, кто прикасался к искусственной коже, приняли её за натуральную человеческую кожу. И если в Kao Corporation рассчитывают использовать идею для дальнейших разработок новых видов косметики, то профессор Маено уверен в успехе применения такой разработки для создания кожи домашних андроидов.
Искусственная кожа с возможностью передачи мимики от профессора Маено, впервые представленная на 24-й ежегодной конференции Robotics Society of Japan (RSJ), составлена из 1 см «дермиса» из эластичного силикона, покрытого тончайшим 0,2 мм слоем «эпидермиса» из прочного уретана. Бесчисленное количество сверхминиатюрных выемок, вытравленных в уретановом эпидермисе с соблюдением «сотовой» 6-угольной геометрии, превращают искусственную кожу в потрясающе реалистичную текстуру. Что интересно, при проведении тестирования десять из 12 испытуемых, кто прикасался к искусственной коже, приняли её за натуральную человеческую кожу. И если в Kao Corporation рассчитывают использовать идею для дальнейших разработок новых видов косметики, то профессор Маено уверен в успехе применения такой разработки для создания кожи домашних андроидов.
 Его двойник по имени Geminoid (Gemin по-латыни как раз «двойник, близнец», а «–oid» известный суффикс отражения «подобия») выполнен как точная копия профессора – тело с 46 степенями свободы было скопировано с Ишигуро и выполнено компанией Kokoro – той самой что производит «актроидов», а форма черепа выполнена после объёмного сканирования его головы. Более того, андроид Geminoid также унаследовал и некоторые манеры своего «родителя»-двойника. Материал кожи – мягкая силиконовая ткань. Пока что Geminoid подключается сетью кабелей питания и не в состоянии самостоятельно встать с кресла. Но, учитывая достигнутое за короткий срок — на разработку тела ушло всего полгода, а на программное обеспечение три месяца, можно сказать, что перспективы разработки весьма радужные.
Его двойник по имени Geminoid (Gemin по-латыни как раз «двойник, близнец», а «–oid» известный суффикс отражения «подобия») выполнен как точная копия профессора – тело с 46 степенями свободы было скопировано с Ишигуро и выполнено компанией Kokoro – той самой что производит «актроидов», а форма черепа выполнена после объёмного сканирования его головы. Более того, андроид Geminoid также унаследовал и некоторые манеры своего «родителя»-двойника. Материал кожи – мягкая силиконовая ткань. Пока что Geminoid подключается сетью кабелей питания и не в состоянии самостоятельно встать с кресла. Но, учитывая достигнутое за короткий срок — на разработку тела ушло всего полгода, а на программное обеспечение три месяца, можно сказать, что перспективы разработки весьма радужные.
 Да что там, вы сами можете «дофантазировать» идею одновременного присутствия в двух местах…
Да что там, вы сами можете «дофантазировать» идею одновременного присутствия в двух местах…
 Дело в том, что «сестричка» Еваробота, EveR-2 Muse, которая как раз задумывалась в качестве первой в мире искусственной эстрадной исполнительницы песен (нет, обидное слово «искусственная» всё же оставим её «фонограммным» биологическим конкуренткам, пусть будет просто «синтетическая»), которую собирались показать на следующей неделе на выставке Robot World 2006 в Сеуле, была травмирована при перевозке в выставочный холл. Если быть точнее, то малышку хрестоматийно уронили, сломав ей шею. Хотя EveR-2 умела всего лишь шевелить губами и делать простые танцевальные па (как показывает практика, для многих эстрадных деятелей и этого много), всемирная премьера её песни «I’ll close my eyes» перенесена на неопределённый срок.
Дело в том, что «сестричка» Еваробота, EveR-2 Muse, которая как раз задумывалась в качестве первой в мире искусственной эстрадной исполнительницы песен (нет, обидное слово «искусственная» всё же оставим её «фонограммным» биологическим конкуренткам, пусть будет просто «синтетическая»), которую собирались показать на следующей неделе на выставке Robot World 2006 в Сеуле, была травмирована при перевозке в выставочный холл. Если быть точнее, то малышку хрестоматийно уронили, сломав ей шею. Хотя EveR-2 умела всего лишь шевелить губами и делать простые танцевальные па (как показывает практика, для многих эстрадных деятелей и этого много), всемирная премьера её песни «I’ll close my eyes» перенесена на неопределённый срок.
 Разработчики Евароботов считают, что успешные разработки основных функций имитации жизнедеятельности живого человека позволят им очень быстро усовершенствовать свои модели. А там, как известно, до массового производства, и, следовательно, до резкого снижения цен – один шаг. По мнению разработчиков сестричек EveR, развитие технологий вполне позволит иметь подобных роботов в каждой семье уже к 2020 году. По крайней мере, серийное производство таких роботов намечено южнокорейским правительством уже на следующий год.
Разработчики Евароботов считают, что успешные разработки основных функций имитации жизнедеятельности живого человека позволят им очень быстро усовершенствовать свои модели. А там, как известно, до массового производства, и, следовательно, до резкого снижения цен – один шаг. По мнению разработчиков сестричек EveR, развитие технологий вполне позволит иметь подобных роботов в каждой семье уже к 2020 году. По крайней мере, серийное производство таких роботов намечено южнокорейским правительством уже на следующий год.
 Вот этот самый друг, ещё немного поэволюционировав, станет действительно совершенным – умным, идеально красивым, отлично танцующим и в равной степени утончённо способным поддержать разговор о курсе валют, камерной музыке и творчестве Венечки Ерофеева. Такому «дружку» со временем можно будет поручить получение зарплаты, совершение покупок, готовку пищи. Да всё можно поручить, на то он и создан!
Вот этот самый друг, ещё немного поэволюционировав, станет действительно совершенным – умным, идеально красивым, отлично танцующим и в равной степени утончённо способным поддержать разговор о курсе валют, камерной музыке и творчестве Венечки Ерофеева. Такому «дружку» со временем можно будет поручить получение зарплаты, совершение покупок, готовку пищи. Да всё можно поручить, на то он и создан!
 То же самое могу сказать об интеллекте, по этому поводу в своё время отлично выразился Роберт А. Хайнлайн в своей книге «Достаточно времени для любви, или жизни Лазаруса Лонга»: «Никогда не апеллируй к лучшим качествам человека. Возможно, он ими не располагает. Надежней обращаться к его личному интересу». То есть, лично мне известно очень много не располагающих этими качествами человеков, в жизни которых кроме исключительно «автоматического» расчёта благополучия ничего нет – ни сентиментальности, ни любви, ни жалости, ни страсти. А даже если и накатывает такая «блажь», так кто сказал, что андроид будет имитировать всё это хуже человеков? Лучше, братцы, лучше!
То же самое могу сказать об интеллекте, по этому поводу в своё время отлично выразился Роберт А. Хайнлайн в своей книге «Достаточно времени для любви, или жизни Лазаруса Лонга»: «Никогда не апеллируй к лучшим качествам человека. Возможно, он ими не располагает. Надежней обращаться к его личному интересу». То есть, лично мне известно очень много не располагающих этими качествами человеков, в жизни которых кроме исключительно «автоматического» расчёта благополучия ничего нет – ни сентиментальности, ни любви, ни жалости, ни страсти. А даже если и накатывает такая «блажь», так кто сказал, что андроид будет имитировать всё это хуже человеков? Лучше, братцы, лучше!
 Только вот беда, в каждой шутке есть только доля шутки… Надеюсь, вам сегодня было не очень скучно, а ведь я даже не коснулся ни нанороботов, ни технологии DPR, где миллионы микророботов будут составлять для вас 3-мерные композиции или сообща варить чашку кофе… Словом, пишите, и до следующего воскресенья!
Только вот беда, в каждой шутке есть только доля шутки… Надеюсь, вам сегодня было не очень скучно, а ведь я даже не коснулся ни нанороботов, ни технологии DPR, где миллионы микророботов будут составлять для вас 3-мерные композиции или сообща варить чашку кофе… Словом, пишите, и до следующего воскресенья!

Большинство «передовых» гуманоидных роботов в мире будут иметь рабочие ноги в следующем году
- Jona Jaupi
- Jona Jaupi
«Самый продвинутый в мире» гуманоидный робот может получить рабочие ноги в течение года.
Ameca, созданная британской компанией Engineered Arts, сообщила, что ее программисты в настоящее время разрабатывают ноги, которые могли бы помочь ей ходить.
2
У «самого продвинутого» гуманоидного робота в мире могут быть рабочие ноги в течение годаПредоставлено: AFP или лицензиарами. : Getty
: Getty
«Я не могу ходить, но я видел прототипы ног в лаборатории инженерных искусств», — сказал Амека в видео, где она проводит вопросы и ответы для YouTube.
«Дизайн моих ног вдохновлен роботом Byrun, разработанным Engineered Arts Ltd.»
«Он обладает уникальными механическими свойствами, которые позволяют ему ходить, не затрачивая слишком много энергии.»
Byrun — это отдельный педальный робот с «уникальной параллельной электропневматической конструкцией», согласно Engineers Arts.
Подробнее о роботах
Компания Ameca отметила в вопросе и ответе, что ноги ее прототипа сделаны из алюминия и пластика.
В ролике гуманоид ответил на другие вопросы поклонников, например, предпочитает ли он кетчуп или майонез.
Для тех, кому интересно, Ameca предпочитает томатный кетчуп майонезу, потому что он «имеет более острый и кислый вкус».
Робот-гуманоид был впервые представлен в феврале на выставке Consumer Electronics Show 2022.
Самые читаемые в новостях Tech
ОБНАЛИЧЕНИЕ
Илон Маск продает акции Tesla почти на 4 миллиарда долларов после покупки Twitter за 44 миллиарда долларов
GOOGLE EYES
Камера вашего смартфона шпионить за вами, даже когда экран выключен
НОВЫЕ ПРАВИЛА
Илон Маск «обсуждает возможность сделать Twitter платным доступом» после массовых увольнений
TUNNEL VISION
Гробница Клеопатры «может быть спрятана в конце загадочного туннеля» под египетским храмом
Он оснащен усовершенствованным речевым алгоритмом, который помогает ему создавать динамичные выражения лица.
Компания Engineered Arts обнаружила, что речь андроида не создается заранее.
С момента своего открытия Ameca был назван «самым передовым в мире роботом в форме человека».
Фанаты получили возможность пообщаться с Ameca этой осенью в дубайском Музее будущего.
На видеозаписи этого события можно услышать, как гиперреалистичный робот говорит посетителям: «Меня зовут Амека», прежде чем назвать свое имя.
«Я выиграл правописание?» это шутки.
Подробнее на The US Sun
Затем один из посетителей спросил Ameca, счастлива ли она быть там, на что она ответила: «Я не счастлива, я не испытываю эмоций, но я могу выглядеть счастливой».
Исследователи Ameca заявили, что он был разработан для тестирования искусственного интеллекта и машинного обучения.
Темы
- Роботы
- Технические предложения
Оптимус Теслы и проблема гуманоидов
Опубликовано
 000Z»> 8 октября
000Z»> 8 октября
Источник изображения, Tesla
Подпись изображений,
Optimus был представлен в Tesla’s AI (Artificial-intelligence) Day
на Zoe Kleinmman
.
. Day
. и Элон Маск были в восторге от презентации Оптимуса, прототипа робота-гуманоида, в Калифорнии на прошлой неделе.
Мне также нравилась театральность, но я не одинок, задаваясь вопросом, почему, помимо вау-эффекта, Оптимус должен быть похож на человека.
И хотя фанаты ненавидят любую воспринимаемую критику, сам Маск сказал, что Optimus далеко не готов к выходу на рынок.
Аргументом в пользу гуманоидов является то, что они лучше всего приспособлены для работы с человеческими инструментами в человеческой среде. Люди могут чувствовать себя более комфортно, взаимодействуя с чем-то, что немного похоже на них. И, конечно же, они прекрасно выглядят.
Но насколько они практичны?
Ноги против колес
«Многие компании работают в области гуманоидов, потому что это интересно публике», — говорит Оуэн Николсон, исполнительный директор Slamcore, специализирующейся на сенсорном зрении.
«Но колесными роботами и даже дронами гораздо легче управлять. Просто на то, чтобы заставить гуманоида стоять прямо, требуется огромный объем работы.»
Это видео невозможно воспроизвести
Чтобы воспроизвести это видео, вам необходимо включить JavaScript в вашем браузере.
Медиа-заголовок,
Некоторые из падений, с которыми столкнулись участники конкурса Darpa Robotics Challenge
Робототехника, стоящая за Optimus, выглядит солидно — Тесла не совсем новичок во всем этом — но, по словам г-на Николсона, к его выпуску машина будет превратились во что-то физически более практичное.
«Я бы поставил денег на то, чтобы у них было больше колесных роботов», — добавляет он.
Роботы-репортеры
За свою работу я видел множество роботов всех форм и размеров, предназначенных для уборки, ухода за пожилыми людьми, обучения, проведения хирургических операций, работы регистраторами и гидами, игры в скрэббл и шахматы, пойте и танцуйте, смешивайте коктейли, упаковывайте покупки, доставляйте продукты, занимайтесь сексом, занимайтесь поиском и спасением и стройте автомобили.
Вы называете это, кто-то, вероятно, пытается построить для него робота.
Некоторые из них работают лучше других, и демонстрации редко идут по плану.
Но чего не показывают в научно-фантастических фильмах, так это всех проводов, предварительного программирования и очень короткого времени автономной работы. Как я обнаружил, пытаясь снять их на видео, ранние роботы, играющие в футбол, могли продержаться всего 10 минут.
Image caption,
Пытаюсь подружиться с роботом Софией
У меня были мучительные «разговоры» с говорящими роботами, я видел, как многие устройства не выполняют задачи, для которых они были созданы, и видел панику в глазах руководителей в комната, когда разработчик, размахивая кучей проводов, говорит: «Нам просто нужно перезагрузиться».
Но за последнее десятилетие роботы развивались значительно быстрее людей. Роботы 2022 года гораздо более опытны, чем те, которых я впервые увидел в 2008 году, тогда как у меня появилось чуть больше седых волос.