Содержание
Роботы | это… Что такое Роботы?
Робот-андроид Honda
Ро́бот (от словацк. robota) — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.[1]
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Содержание
|
 1 Известные коммерческие модели роботов
1 Известные коммерческие модели роботовИстория возникновения слова
Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом Йозефом и впервые использовано в пьесе Чапека «Р.У.Р.» («Россумские универсальные роботы», 1921). До появления промышленных роботов считалось, что роботы должны выглядеть подобно людям.
Надо сказать, что роботы Чапека были не механическими, а биологическими существами. Просто у них отсутствовали некоторые человеческие функции, в частности способность влюбляться, а значит и желание продолжать свой род. В произведении фантаста роботы преодолели этот недостаток и стали неотличимы от людей.
Предыстория
Искусственные существа
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею. Также в мифе про Гефеста рассказывается, как он создал себе различных слуг. Древнееврейский миф рассказывает о Големе, который был оживлён каббалистической магией.
Также в мифе про Гефеста рассказывается, как он создал себе различных слуг. Древнееврейский миф рассказывает о Големе, который был оживлён каббалистической магией.
Похожий миф излагается в скандинавском эпосе Младшая Эдда. Там рассказывается о глиняном гиганте Мисткалфе, созданный троллем Рунгнером для схватки с Тором, богом грома.
Технические устройства
Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн скорее всего основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.[2]
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. Он также изготовил механических уток, которые, как говорили, умели клевать корм и «испражняться».
Хронология
Конец XIX века — Русский инженер Пафнутий Чебышев придумал механизм — ступоход, обладающий высокой проходимостью.
1898 — Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно.
1921 — Чешский писатель Карел Чапек представил публике пьесу под названием «Россумские Универсальные Роботы», откуда и взяло начало слово «робот» (от словацк. robota).
1930-е — Появились конструкции внешне напоминающих человека устройств, способных выполнять простейшие движения и воспроизводить фразы по команде человека. Первый такой «робот» был сконструирован американским инженером Д. Уэксли для Всемирной выставки в Нью-Йорке в 1927 году.
1950-е — Для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.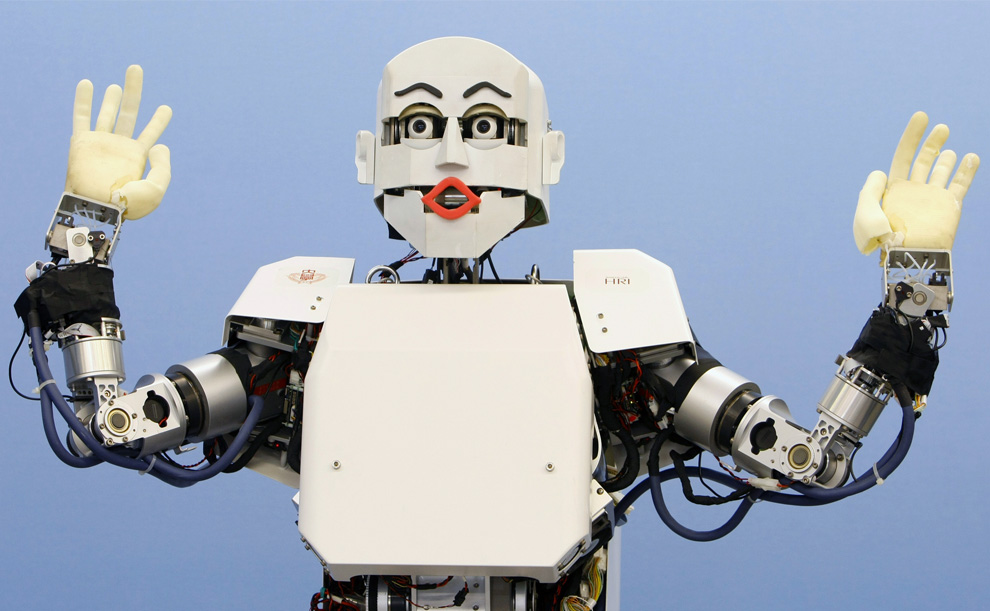
1960 — Дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
1979 — В МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01.
2000 — В Чечне был успешно применён робот-разведчик «Вася» для обнаружения и обезвреживания радиоактивных веществ.
2005 — ВМФ России в Балтийском море проведены испытания подводного робота-разведчика «Гном».
Устройство
Система передвижения
Советский Луноход-1
Для передвижения по открытой местности чаще всего используют колёсную или гусеничную, реже — шагающую систему передвижения роботов. Это самые универсальные виды систем перемещения.
Робот на гусеничном ходу
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным, вертикальным плоскостям используются системы, аналогичные «шагающим» конструкциям, но с пневматическими присосками.
Основная статья: Промышленный робот
Появление станков с числовым программным управлением (ЧПУ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Бытовые роботы
Основная статья: Бытовой робот
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка Sony.
В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы «Вакамару» производства фирмы
Всё большую популярность набирают роботы-уборщики, по своей сути — автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Роботы для обеспечения безопасности
- Р-БОТ 001
Роботы как хобби
Изобретатель Пит Редмонд (Pete Redmond) создал робота RuBot II, который может собрать кубик Рубика за 35 секунд.
Существует также направление моделизма, которое подразумевает создание роботов. Сейчас моделисты делают как радиоуправляемых роботов, так и автономных. Проводятся соревнование по нескольким основным направлениям.
Некоторые соревнования мобильных роботов:
- Молодежный научно-технический фестиваль «Мобильные роботы»
- Российская национальная лига ЕВРОБОТ
Среди соревнований автономных роботов стоит упомянуть следование по линии на скорость, борьбу сумо, футбол роботов.
Интересные факты
Трагические факты
- В 1981 году Кэндзи Урада, рабочий завода Kawasaki стал первой официальной жертвой, погибшей от руки робота.[3] С этого времени число жертв роботов растет, несмотря на внедрение усовершенствованных механизмов безопасности.
- 18 марта 2008 года 81-летний австралиец стал первым человеком, который покончил жизнь самоубийством при помощи робота, которого сам собрал согласно схемам, взятым из сети Интернет.[4]
Производители роботов
- Mitsubishi
Известные коммерческие модели роботов
- Aibo
- Pleo
- SCORBOT-ER 4u
- Wakamaru
Художественная литература
С развитием технологии люди всё чаще видели в механических созданиях что-то больше, чем просто игрушки. Литература отразила страхи человечества, что люди могут быть заменены своими собственными творениями. Роман «Франкенштейн, или Современный Прометей» (1818) иногда называют первым научно-фантастическим произведением, олицетворяющим эту проблему. Позже Карел Чапек пишет знаменитую пьесу «R.U.R.», в которой представлена идея сборочной линии, на которой роботы собирают самих себя, произведение имело экономический и философский подтексты. В дальнейшем эти идеи развиваются в фильмах «Метрополис» (1927), «Бегущий по лезвию» (1982) и «Терминатор» (1984). Как роботы с искусственным интеллектом становятся реальностью и взаимодействуют с человеком, показано в фильмах «Искусственный разум» (2001) режиссёра Стивена Спилберга и «Я, робот» (2004) режиссёра Алекса Пройяса. В фантастических рассказах Айзека Азимова сформулированы «Три Закона Роботехники»:
Позже Карел Чапек пишет знаменитую пьесу «R.U.R.», в которой представлена идея сборочной линии, на которой роботы собирают самих себя, произведение имело экономический и философский подтексты. В дальнейшем эти идеи развиваются в фильмах «Метрополис» (1927), «Бегущий по лезвию» (1982) и «Терминатор» (1984). Как роботы с искусственным интеллектом становятся реальностью и взаимодействуют с человеком, показано в фильмах «Искусственный разум» (2001) режиссёра Стивена Спилберга и «Я, робот» (2004) режиссёра Алекса Пройяса. В фантастических рассказах Айзека Азимова сформулированы «Три Закона Роботехники»:
- Робот не может причинить вреда человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен выполнять приказы человека в той мере, в которой это не противоречит Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Азимов в своих произведениях убедительно показывает, что эти законы, будучи заложены в программу-мозг робота в виде обязательных (безусловно исполняемых роботом) законов исключают возможность проявления любых недружественных действий робота по отношению к человеку. Приводятся также примеры негативных последствий, возникающих в случае, когда люди пренебрегая требованиям обязательности трех законов блокируют на этапе программирования робота один из законов (например, вторую часть первого закона). В этом случае робот может найти логически непротиворечивое решение, позволяющее ему нарушить 1-й закон и стать опасным для человека.
Приводятся также примеры негативных последствий, возникающих в случае, когда люди пренебрегая требованиям обязательности трех законов блокируют на этапе программирования робота один из законов (например, вторую часть первого закона). В этом случае робот может найти логически непротиворечивое решение, позволяющее ему нарушить 1-й закон и стать опасным для человека.
Также Айзеком Азимовым (в романах «Роботы и Империя», «На пути к основанию»)сформулирован так называемый «нулевой» закон робототехники: «Робот не может причинить вред человечеству или своим бездействием способствовать этому»
«…Нулевой. Робот не может причинить вред человечеству или, своим бездействием, способствовать этому. Тогда Первый Закон следует читать следующим образом: Первый. Робот не может причинить вред человеческому существу или, своим бездействием, способствовать этому, кроме тех случаев, когда это противоречит Нулевому Закону. Таким же образом следует трактовать и последние два…» — Айзек Азимов «На пути к основанию»
Сноски
- ↑ Толковый словарь под ред.
 Ефремовой
Ефремовой - ↑ http://chip-news.ru/archive/chipnews/200402/Article_14.pdf
- ↑ http://aeterna.ru/userpost.php?Diabola&post=121642
- ↑ http://www.infox.ru/hi-tech/tech/2009/02/12/robots_will_not_harm_people_2.phtml
 Ефремовой
ЕфремовойСм. также
- Андроид
- Искусственный интеллект
- Киборг
- Робототехника
- Соревнования ПАТС (автоматических автомобилей)
- Зал славы роботов
- Боевой робот
Ссылки
- Робототехника в России — каталог сайтов по робототехнике.
- Roboforum.RU — Русскоязычное сообщество любительской робототехники
- Всё для робототехника. Действующие модели роботов и системы искусственного интеллекта
- Практическая робототехника
- Социальная сеть по созданию роботов
- Университетская программа исследований в области роботехники
- Робот Экобот — энергия для роботов из биологических продуктов
- Япония готовится принять на работу роботов
- Новости робототехники
- Будущее роботов: от дворников до хирургов
Видео
- Четырёхногий адаптивный робот фирмы Boston Dynamics (март 2008)
Как распознать робота
Добро пожаловать на курс «Робототехника». В первом модуле вы узнаете:
В первом модуле вы узнаете:
• как могут выглядеть роботы;
• что такое робот и как его распознать;
• какие дополнительные элементы может иметь робот;
• что может заставить робота двигаться;
• где встречаются роботы дома и в городе;
• что умеют роботы и в каких областях им уже нашлось применение.
Оглавление
Что такое робототехника
Познакомьтесь с ментором курса: Николай Пак, основатель «Лиги Роботов», федеральной сети секции робототехники. В этом видео он расскажет о том, что такое робототехника, каковы основные составляющие робота и какие он может выполнять задачи.
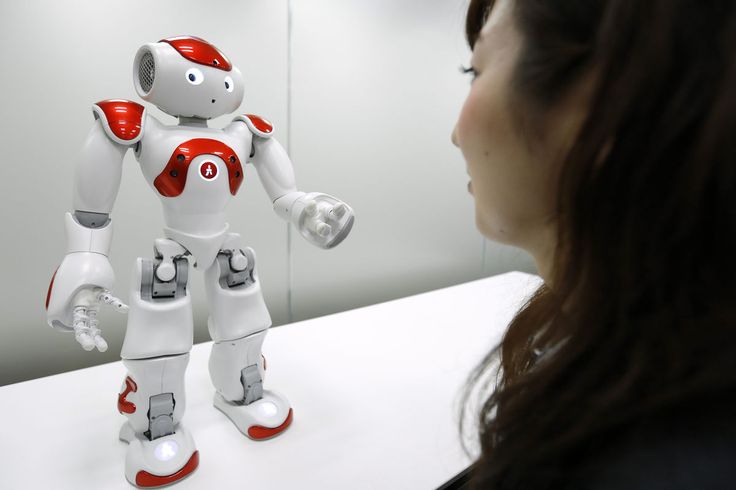
Такие разные
Услышав слово «роботы», вы наверняка представляете себе что-то хотя бы отдаленно похожее на человека или животное. Однако в жизни это не всегда так: форма, вид и размер робота определяются задачей, которую он решает.
Однако в жизни это не всегда так: форма, вид и размер робота определяются задачей, которую он решает.
Все объекты на картинках — роботы, каждый из них автоматизирует какую-то работу, выполняя заранее заданную функцию.
Антропоморфный робот заменяет человека на опасной работе
Кодовый замок «охраняет» вход в здание
Стиральная машина берет на себя стирку, полоскание и отжим
Дрон обеспечивает обзор с высоты без участия пилота
Фитнес-браслет считает шаги и потраченные калории вместо тренера
Понять, кто перед вами, помогут общие для всех роботов признаки. О них мы поговорим в следующей части модуля. Пока важно запомнить: робот может выглядеть как угодно.
Что робототехники называют роботом?
Как видите, внешнее сходство с живыми существами — не обязательный признак робота. По мнению специалистов, робота можно описать так:
Как следует из определения, робот может выглядеть как угодно. Роботом его делают «признаки робота», а не внешний вид. Давайте разберемся.
Роботом его делают «признаки робота», а не внешний вид. Давайте разберемся.
Как устроен робот и как он работает
Каждый робот — это набор конкретных деталей, а зачастую и программ, подобранных для выполнения нужных нам действий. Но чем бы ни занимался и из чего бы ни состоял наш робот, для совершения действия он всегда будет собирать информацию, анализировать ее и действовать по результатам этого анализа.
Изучите схему, чтобы узнать, что делают привычные вам роботы на каждом из этапов и какие устройства при этом задействуют.
Шаг 1 — Ухо.
Робот получает информацию или испытывает воздействие извне. Для этого он использует датчики, сенсоры и другие устройства. Сенсор движения, который включает электричество, когда мы входим в помещение, валидатор проездного в метро, микрочип для распознавания голоса в голосовых помощниках — все это устройства для получения информации из окружающей среды.
Шаг 2 — Мозг.
Робот перерабатывает полученную информацию по заранее заданному алгоритму. В разные времена и в разных ситуациях алгоритм работы задавали по-разному. Так, первые механические роботы начинали двигаться, когда их заводили, как часы. Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер дает освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
В разные времена и в разных ситуациях алгоритм работы задавали по-разному. Так, первые механические роботы начинали двигаться, когда их заводили, как часы. Сегодня «решение» обычно принимает маленький бортовой компьютер — микроконтроллер с записанной на него программой. Скажем, на основе данных с сенсора движения микроконтроллер дает освещению команду включиться или выключиться. Другой микроконтроллер решает, открывать ли турникет метро. Третий сопоставляет голосовую команду с заданным алгоритмом и по просьбе хозяина включает телевизор. Это — устройства анализа полученной информации.
Шаг 3 — Рука.
Робот выполняет нужную операцию. Программа или механизм решают, приводить робота в действие или нет. Если да — он включается и делает то, для чего предназначен. Свет включается будто сам собой, турникет метро открывается и пропускает пассажира, телевизор включается на нужной программе — это устройства, которые исполняют команды.
Как понять, что перед вами робот? Обязательные элементы
Определить, робот перед вами или нет, можно, обратив внимание на характерные признаки. У робота всегда есть:
У робота всегда есть:
Система датчиков — через нее робот получает информацию из внешнего мира. Например, это датчики движения, сенсоры обнаружения препятствий и т. п.
Цель — «смысл жизни робота», та задача, ради автоматизации которой его придумали.
Алгоритм действий — по нему робот выполняет нужные действия в разных условиях в соответствии с поставленной целью (сегодня это обычно программа, раньше мог быть механизм).
Исполняющее устройство — двигатель, «руки», «ноги». То, что приводит робота в действие или изменяет его положение в пространстве.
Система, в которую объединены первые четыре пункта, то, как они связаны и взаимодействуют.
Что часто добавляют к роботам. Дополнительные элементы
Датчик, алгоритм, исполняющее устройство — это основа, заложенная внутрь любого робота. Но обойтись только этим набором сложно. Чтобы робот мог решать больше задач, а работать с ним было удобнее, к основе часто добавляют разные детали. Ниже мы собрали самые популярные (но помните, что одними ими список не ограничивается).
Ниже мы собрали самые популярные (но помните, что одними ими список не ограничивается).
Как заставить робота работать: 5 основных способов
Итак, роботы могут выглядеть по-разному, состоять из различных деталей и выполнять какие угодно задачи. Приводить их в действие тоже можно разными способами — одни известны веками, другие появились у человечества недавно.
Роботы бывают:
Механические
Заводные механические устройства использовали еще древние греки, а первый антропоморфный механический робот появился в XII веке у арабов. В наши дни механику блестяще использует нидерландский художник Тео Янсен: его знаменитые «шагающие фигуры» приводятся в действие ветром, прибоем или человеком.
Поделиться
Гидравлические
Такие роботы используют в работе законы движения жидкостей. Регулируя уровень и давление жидкости в системе, мы добиваемся от устройства нужных действий. Таких роботов часто можно встретить в промышленности: они способны прикладывать огромную силу и при этом работать быстро и аккуратно. Именно гидравлические приводы часто используются у роботов-грузчиков
Таких роботов часто можно встретить в промышленности: они способны прикладывать огромную силу и при этом работать быстро и аккуратно. Именно гидравлические приводы часто используются у роботов-грузчиков
Поделиться
Электронные
Первым таким роботом принято считать миниатюрное радиоуправляемое судно, которое разработал в конце XIX века Никола Тесла. В 1930-х появились первые устройства, которые напоминали человека и могли выполнить простейшие действия и даже воспроизводить отдельные фразы. Сегодня электронные элементы в роботах используются очень широко, но зачастую в комбинации с другими типами систем.
Поделиться
Софтверные
Это роботы-программы, которые умеют взаимодействовать с объектами реального мира и давать осязаемый результат. «Умный дом» в городе, «умная теплица» на ферме, «умный климат-контроль» в офисе, программа, которая включает сеть уличного освещения по расписанию — это тоже роботы.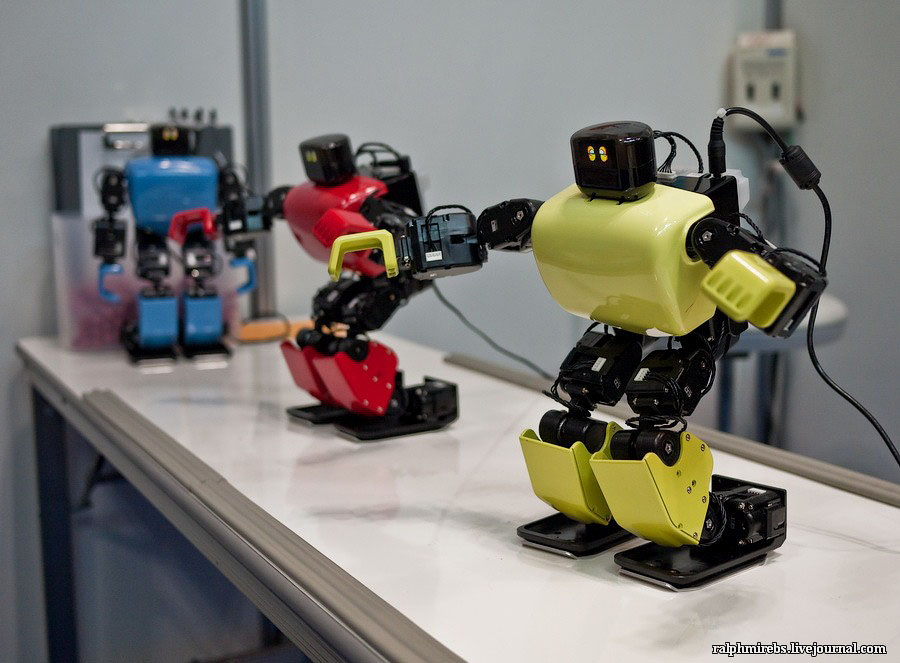
Поделиться
Комбинированные роботы
Самый распространенный на сегодня вид роботов. Одного принципа работы часто не хватает для решения продвинутых задач, и инженеры соединяют внутри робота несколько систем. Например, фитнес-браслет тоже использует механическую составляющую: электронная энергия преобразуется в механическую энергию вибрации, и браслет дает вам знать, что вы засиделись.
Поделиться
Очевидное-невероятное: почему чат-бот, квадрокоптер и фитнес-браслет тоже роботы
Любые устройства и программы могут считаться роботами при условии, что они делают что-то осязаемое и соответствуют другим признакам роботов. Давайте разберем это утверждение на нескольких примерах из современной жизни.
Чат-бот не робот, а обычная программа, если он:
получает от вас вопрос, ищет ответ в поисковике и выдает его вам — это всего лишь программа, связанная с другими программами, он действует в виртуальном мире.
Чат-бот — это софтверный робот, если он:
получает от вас сообщение и выключает розетку или настраивает ее работу по таймеру — он дает ощутимый результат, заметный вне виртуальной среды.
Беспилотный дрон — это классический робот: у него есть цель, система датчиков, алгоритм, управляющие устройства — система стабилизации, двигатели и т. д.
Квадрокоптер — это радиоуправляемый робот. Хотя направление движения ему задает человек (оператор) с земли, устройство само стабилизирует свое положение в пространстве, а потому может считаться роботом.
Фитнес-браслет тоже робот. Он призван заменить нам тренера в простейших ситуациях и автоматизировать записи о физической активности, то есть у него есть цель. Он определяет движение, уровень нагрузок или состояние сна за счет встроенной системы датчиков, работает по алгоритму и оказывает прямое воздействие на окружающую среду (например, вибрирует, напоминая человеку, что тот долго сидит — пора бы встать и немного размяться).
Роботы повсюду: где они встречаются в городе и дома
Мы уже говорили о том, что под влиянием научной фантастики люди считают роботами только те устройства, что похожи на людей или животных. Но мы-то с вами знаем, что роботом можно назвать любое устройство или программу, которые имеют цель, алгоритм и связаны с внешним миром через датчики и исполняющие устройства. Такие роботы давно и прочно вошли в наш обиход — и люди сталкиваются с ними каждый день, сами того не замечая.
Роботы у нас дома
1. Стиральная машина:
Стиральная машина получает указания, запускает нужную программу, а затем с помощью датчиков следит за температурой и уровнем воды. В конце она сама разблокирует дверцу и подает сигнал об окончании стирки.
2. Система управления «умным домом» (на столе):
Системы голосового управления начинают входить в нашу жизнь. Так, свыше 30 млн человек в России пользуются голосовыми помощниками на мобильных устройствах и дома. Такие роботы бывают исключительно софтверным (как Siri компании Apple или Алиса компании «Яндекс»), а могут выпускаться и в виде устройств-колонок — Amazon Echo, Google Home, «Яндекс.Станция». Они оборудованы системой распознавания голоса и реагируют на внешний мир включением и выполнением команд, заданных программой.
Такие роботы бывают исключительно софтверным (как Siri компании Apple или Алиса компании «Яндекс»), а могут выпускаться и в виде устройств-колонок — Amazon Echo, Google Home, «Яндекс.Станция». Они оборудованы системой распознавания голоса и реагируют на внешний мир включением и выполнением команд, заданных программой.
3. Робот-пылесос:
Робот-пылесос может убирать по расписанию и в заданном режиме, а может включаться по требованию и убирать все пространство или отдельную зону. Датчики позволяют ему не застрять под мебелью, а в случае внештатной ситуации робот подаст звуковой сигнал. Одна только компания iRobot, известная роботом-пылесосом Roomba, продала по всему миру более 20 миллионов своих устройств — и это не единственный производитель.
4. Термометр на стене:
«Умный дом» — частный случай софтверных роботов. Климат-контроль в помещении может запускать определенные режимы по таймеру или в соответствии с показаниями датчиков. Когда на улице темнеет или светает, система сама регулирует освещение. «Умный дом» получает информацию извне через систему датчиков, а выполняет свои функции по заданным алгоритмам через электропроводку, динамики, включение или выключение дополнительных устройств и другие элементы
«Умный дом» получает информацию извне через систему датчиков, а выполняет свои функции по заданным алгоритмам через электропроводку, динамики, включение или выключение дополнительных устройств и другие элементы
5. Датчик на двери в соседнюю комнату:
Датчики — важная часть системы «умного дома». Они умеют извлекать из окружающей среды самую разную информацию, а система, обработав эту информацию, совершает заданное действие. Например, датчик движения на двери реагирует на ее открытие или закрытие и посылает сигнал на микроконтроллер, который зажигает в комнате свет.
Конечно, на картинке представлены далеко не все роботы, которые способны помогать в быту. У того же робота-пылесоса есть младший брат — небольшой вакуумный пылесос, который ползает по столу и собирает крошки. Есть и двоюродный брат — вакуумный мойщик окон.
Уже появились роботы, которые:
носят за хозяином покупки
моют посуду и сантехнику
готовят еду
кормят и развлекают домашних питомцев в отсутствие хозяина
Роботы учатся помогать не только по дому, но и в личных делах. Так, появляются роботы-помощники для пожилых людей — они ездят за хозяином по дому, могут напомнить, какие цветы полить сегодня, вызвать экстренные службы или позвонить близким. А японский робот-компаньон Lovot призван отчасти заменить близких, когда их нет рядом, так как он умеет имитировать привязанность: если обнять такого робота, он станет теплым, а затем будет преданно следовать за хозяином.
Так, появляются роботы-помощники для пожилых людей — они ездят за хозяином по дому, могут напомнить, какие цветы полить сегодня, вызвать экстренные службы или позвонить близким. А японский робот-компаньон Lovot призван отчасти заменить близких, когда их нет рядом, так как он умеет имитировать привязанность: если обнять такого робота, он станет теплым, а затем будет преданно следовать за хозяином.
Роботы для гостиниц, баров и торговых центров
1. Роботы-рецепционисты могут зарегистрировать постояльца, выдать ему карту-ключ и ответить на простейшие вопросы. Им не нужны перерывы и выходные, поэтому из них получаются прекрасные помощники администраторов.
2. Робот-бармен принимает заказ через мобильное приложение и наливает клиенту выбранный напиток, либо смешивает коктейль по просьбе или даже рецепту посетителя. Некоторые версии способны распознавать речь клиента и отвечать ему. Уже разработан робот-бариста, который наливает кофе и выдает конфеты, на очереди — робот-повар, который будет готовить хот-доги, картошку фри и даже блины.
3. Робот-носильщик получает команду, в какой номер надо отнести вещи гостя, и доставляет их самостоятельно. В номере его встречает другой робот, который разложит вещи по ячейкам, а перед отъездом аккуратно уложит обратно в чемодан.
4. Роботы-уборщики по заданному расписанию чистят полы, аккуратно избегая столкновений с людьми и время от времени возвращаясь на базу для подзарядки и обслуживания: им надо регулярно освобождать контейнер для пыли и чистить щетки и фильтры.
5. Камеру хранения тоже можно доверить роботу. Достаточно положить сумку или чемодан в специальное окошко — и роборука поместит его в отдельную ячейку.
Роботы на улицах города
1. Дроны помогают городским службам и полиции следить за оперативной обстановкой на улицах. На основе данных с камер дрона оператор может удаленно отрегулировать светофор или прислать специалистов на место аварии. У дрона есть камеры, а оператор в случае необходимости дает команду — и дрон меняет высоту, направление или скорость.
2. Дроны-доставщики умеют приносить заказ из ресторана или покупки из магазина. Они оборудованы GPS, чтобы добраться по нужному адресу, и устройством распознавания лиц — узнав заказчика, микроконтроллер дает манипулятору команду выпустить заказ.
3. Современные камеры автоматически засекают нарушителей на дорогах: у них есть детекторы скорости и система распознавания номеров. Если скорость превышена, они автоматически отправляют данные в систему, которая выписывает штраф (то есть действуют самостоятельно по заданному алгоритму).
4. Роботы-полицейские патрулируют улицы и обеспечивают безопасность. Скажем, в Пекине это уже реальность. Там они оборудованы системой распознавания лиц, чтобы засекать угрозу, рукой-электрошокером (ею управляет диспетчер), динамиками и камерами. При необходимости такой робот может проверить документы — обратиться к прохожему через динамик и камерой передать изображение документа диспетчеру. Тестируют полицейских и в других городах.
5. Колесные дроны уже тестируются компанией Amazon, чтобы в будущем полностью автоматизировать городскую доставку. Дрон движется по тротуару на шести колесах, огибая пешеходов, а распознав заказчика, открывает крышку и позволяет забрать заказ.
6. Кнопка на переходе реагирует на нажатие, после чего микроконтроллер через заданное алгоритмом время меняет свет на зеленый.
Робот на коленке
В этом видео ментор курса Николай Пак расскажет, как собрать робота из подручных материалов. Пока смотрите видео, постарайтесь запомнить, на какие вопросы нужно ответить, когда делаешь робота.
Если вы решитесь собрать такого робота самостоятельно —
вот инструкция
, как это сделать.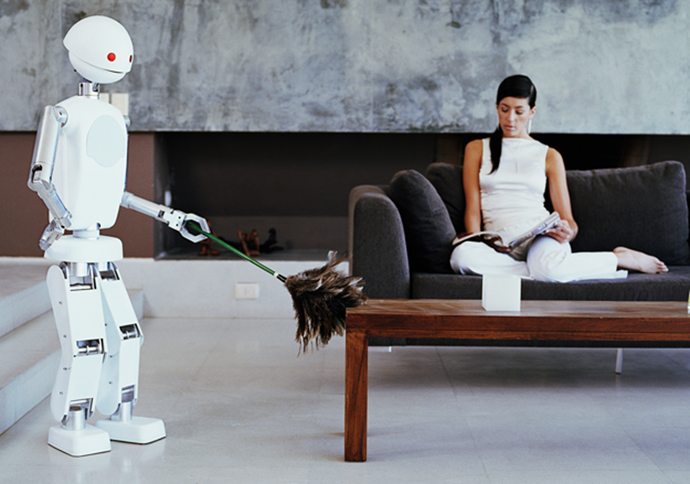
ПЕРЕЙТИ КО ВТОРОМУ МОДУЛЮ
Робототехника: что такое роботы? Определение и использование робототехники.
Как работают роботы?
Независимые роботы
Независимые роботы способны функционировать полностью автономно и независимо от контроля оператора. Обычно они требуют более интенсивного программирования, но позволяют роботам заменять людей при выполнении опасных, обыденных или невыполнимых по иным причинам задач, от сброса бомб и глубоководных путешествий до автоматизации производства. Независимые роботы оказались наиболее разрушительными для общества, поскольку они сокращают определенные рабочие места, но также предоставляют новые возможности для роста.
Зависимые роботы
Зависимые роботы — это неавтономные роботы, которые взаимодействуют с людьми для улучшения и дополнения уже существующих действий. Это относительно новая форма технологии, и она постоянно расширяется для новых приложений, но одна из реализованных форм зависимых роботов — это усовершенствованные протезы, которые контролируются человеческим разумом.
Известный пример зависимого робота был создан Johns Hopkins APL в 2018 году для Джонни Матени, пациента, которому ампутировали руку выше локтя. Матени был оснащен модульным протезом конечности, чтобы исследователи могли изучать его использование в течение длительного периода времени. MPL контролируется с помощью электромиографии или сигналов, посылаемых его ампутированной конечностью, которая управляет протезом. Со временем Матени стал более эффективно управлять MPL, а сигналы, посылаемые его ампутированной конечностью, стали меньше и менее изменчивы, что привело к большей точности его движений и позволило Матени выполнять такие деликатные задачи, как игра на пианино.
Лучшие компании в области робототехники с открытыми ролямиПросмотр лучших компаний в области робототехники, нанимающих сейчас
Каковы основные компоненты робота?
Роботы созданы для решения различных задач и выполнения различных задач, поэтому для выполнения этих задач требуются различные специализированные компоненты.
Каковы основные компоненты робота?
- Система управления: центральный процессор, который управляет задачей робота на высоком уровне.
- Датчики: компонент, передающий электрические сигналы, позволяющие роботу взаимодействовать с окружающим миром.
- Приводы: части двигателя, отвечающие за движение робота.
- Блок питания: аккумулятор, который обеспечивает питание робота.
- Концевые эффекторы: внешние особенности робота, позволяющие ему выполнять задачу.
Однако есть несколько компонентов, которые являются центральными в конструкции каждого робота, например, источник питания или центральный процессор. Вообще говоря, компоненты робототехники делятся на следующие пять категорий:
Система управления
Вычисления включают в себя все компоненты, составляющие центральный процессор робота, который часто называют его системой управления. Системы управления запрограммированы так, чтобы сообщать роботу, как использовать его определенные компоненты, в некотором роде подобно тому, как человеческий мозг посылает сигналы по всему телу для выполнения конкретной задачи. Эти роботизированные задачи могут включать что угодно, от минимально инвазивной хирургии до упаковки на конвейере.
Эти роботизированные задачи могут включать что угодно, от минимально инвазивной хирургии до упаковки на конвейере.
Датчики
Датчики обеспечивают робота стимулами в виде электрических сигналов, которые обрабатываются контроллером и позволяют роботу взаимодействовать с внешним миром. Общие датчики, используемые в роботах, включают видеокамеры, функционирующие как глаза, фоторезисторы, реагирующие на свет, и микрофоны, работающие как уши. Эти датчики позволяют роботу фиксировать свое окружение и делать наиболее логичный вывод на основе текущего момента, а также позволяют контроллеру передавать команды дополнительным компонентам.
Видео: Лаборатория прикладной физики JHU
Приводы
Устройство можно считать роботом, только если оно имеет подвижную раму или корпус. Приводы – это компоненты, отвечающие за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и движутся в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специальные функции.
Приводы – это компоненты, отвечающие за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и движутся в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специальные функции.
Блок питания
Как человеческому телу для работы требуется пища, так и роботам нужна энергия. Стационарные роботы, например, установленные на фабрике, могут работать от сети переменного тока через настенную розетку, но чаще всего роботы работают от внутренней батареи. В большинстве роботов используются свинцово-кислотные батареи из-за их безопасных качеств и длительного срока хранения, в то время как в других могут использоваться более компактные, но и более дорогие серебряно-кадмиевые батареи. Безопасность, вес, заменяемость и жизненный цикл — все это важные факторы, которые необходимо учитывать при разработке блока питания робота.
Безопасность, вес, заменяемость и жизненный цикл — все это важные факторы, которые необходимо учитывать при разработке блока питания робота.
Некоторые потенциальные источники энергии для будущего развития роботов также включают пневматическую энергию от сжатых газов, солнечную энергию, гидравлическую энергию, энергию маховика для хранения органических отходов посредством анаэробного сбраживания и ядерную энергию.
Концевые эффекторы
Концевые эффекторы — это физические, обычно внешние компоненты, которые позволяют роботам завершать выполнение своих задач. Роботы на фабриках часто имеют сменные инструменты, такие как распылители краски и сверла, хирургические роботы могут быть оснащены скальпелями, а другие виды роботов могут быть созданы с захватными когтями или даже руками для таких задач, как доставка, упаковка, распыление бомб и многое другое.
Как работают роботы | Как работает
«»
R2-D2 (слева) и C-3PO на премьере фильма «Звездные войны: Пробуждение силы» в 2015 году в Голливуде, Калифорния. Для многих людей эти две цифры представляют, как выглядят роботы. Фрейзер Харрисон / Getty Images
Для многих людей эти две цифры представляют, как выглядят роботы. Фрейзер Харрисон / Getty Images
На самом базовом уровне человек состоит из пяти основных компонентов:
- Структура тела
- Система мышц, обеспечивающая движение структуры тела
- Сенсорная система, которая получает информацию о теле и окружающей среде
- Источник питания для активации мышц и сенсоров
- Мозговая система, которая обрабатывает сенсорную информацию и сообщает мышцам, что делать
физический уровень, приведенный выше список покрывает его.
Реклама
Робот состоит из тех же компонентов. Базовый типичный робот имеет подвижную физическую структуру, какой-то двигатель, сенсорную систему, источник питания и компьютерный «мозг», который управляет всеми этими элементами. По сути, роботы — это созданные человеком версии жизни животных — это машины, которые копируют поведение людей и животных.
Джозеф Энгельбергер, пионер в области промышленной робототехники, однажды заметил: «Я не знаю, как определить их, но я узнаю их, когда вижу!» Если вы рассмотрите все различные машины, которые люди называют роботами, вы увидите, что почти невозможно дать исчерпывающее определение. У всех разное представление о том, что представляет собой робот.
У всех разное представление о том, что представляет собой робот.
Вы, наверное, слышали о некоторых из этих известных роботов:
- R2-D2 и C-3PO: умные, говорящие роботы с большим количеством индивидуальностей из фильмов «Звездные войны»
- AIBO от Sony: роботизированная собака, которая учится через взаимодействие с человеком
- ASIMO от Honda: робот, который может ходить на двух ногах, как человек
- Промышленные роботы: автоматизированные машины, работающие на сборочных линиях Человек-андроид из «Звездного пути»
- Боевые роботы: истребители с дистанционным управлением из долгоиграющего телешоу
- Роботы для обезвреживания бомб
- Марсоходы НАСА
- HAL: Корабельный компьютер в фильме Стэнли Кубрика «2001: Космическая одиссея»
- Roomba: робот-пылесос от iRobot
- Робот из телесериала «Затерянные в космосе»
- MINDSTORMS: популярный набор робототехники LEGO
Все эти вещи считаются роботами, по крайней мере, некоторые люди.