Содержание
Человекоподобные роботы появятся везде, кроме России — РБК
Разумные машины незаметно для человечества вошли в нашу жизнь: роботы уже сегодня выполняют тяжелую работу в условиях, исключающих присутствие человека — воюют, учат, осваивают космос, помогают лечить и спасать людей. Думается, в будущем они заменят Homo sapiens и в более «тонких» сферах таких, как кулинария или искусство. И пусть пока наши автоматизированные помощники не настолько разумны, как представители рода человеческого, однако уже сейчас можно говорить о том, что идеи писателей-фантастов XX века медленно, но верно воплощаются в жизнь.
Когда же ждать человечеству появления фантастических андроидов, готовящих ужин и встречающих гостей, и почему Россия не поспевает за ведущими мировыми державами в развитии умных машин?
От чертежей Леонардо да Винчи к японцу Asimo
С самого начала эпохи конструирования роботов изобретатели пытались сделать их похожими на людей. Первый чертеж механического рыцаря, созданный примерно в 1495г. , принадлежит руке великого ученого Леонардо да Винчи. Много позднее попытки собрать человекоподобных роботов предпринимались инженерами-изобретателями в разных странах мира. Впрочем, подавляющее большинство из них носили характер мистификаций — пресса то и дело разоблачала очередного шарлатана, скрывшего в «разумном» псевдороботе человека или дрессированное животное.
, принадлежит руке великого ученого Леонардо да Винчи. Много позднее попытки собрать человекоподобных роботов предпринимались инженерами-изобретателями в разных странах мира. Впрочем, подавляющее большинство из них носили характер мистификаций — пресса то и дело разоблачала очередного шарлатана, скрывшего в «разумном» псевдороботе человека или дрессированное животное.
Само слово «робот» вошло в широкий оборот после публикации в 1921г. пьесы чешского писателя Карела Чапека «Р. У. Р.» («Россумские универсальные роботы»). Позднее в книгах известного писателя-фантаста Айзека Азимова появились понятия «робототехника» и «андроид» (человекоподобный робот).
Толчком для развития роботизированных систем в мире стали бурная индустриализация и начало освоения космоса в XX веке. В 1913г. одна из первых роботизированных линий была установлена на предприятии Генри Форда в США. В 1930-е гг. были созданы различные устройства, копирующие движения человека и воспроизводящие простейшие фразы. Первый такой робот был сконструирован американским инженером Д. Уэксли для Всемирной выставки в Нью-Йорке в 1927г. В 1950-е гг. для работы с радиоактивными материалами разработали механические манипуляторы, копирующие движения рук человека, а первыми серьезными роботами стали луноходы. В Советском Союзе «Луноход-1» был создан в 1966г. В ноябре 1970г. он стал первым аппаратом, покорившим Луну (как известно, 20 июля 1969г. на спутник Земли впервые ступил человек, американский астронавт Нил Армстронг). Во второй половине XX века ученые активно совершенствовали роботов, делая их все более функциональными, а появление компьютеров открыло небывалые возможности для разработки основ искусственного интеллекта.
Уэксли для Всемирной выставки в Нью-Йорке в 1927г. В 1950-е гг. для работы с радиоактивными материалами разработали механические манипуляторы, копирующие движения рук человека, а первыми серьезными роботами стали луноходы. В Советском Союзе «Луноход-1» был создан в 1966г. В ноябре 1970г. он стал первым аппаратом, покорившим Луну (как известно, 20 июля 1969г. на спутник Земли впервые ступил человек, американский астронавт Нил Армстронг). Во второй половине XX века ученые активно совершенствовали роботов, делая их все более функциональными, а появление компьютеров открыло небывалые возможности для разработки основ искусственного интеллекта.
В начале XXI века началась новая эра «умных» андроидов. Первый серьезный человекоподобный робот, SDR-3X был представлен японской компанией Sony в ноябре 2000г. В том же году публика познакомилась с куда более известным андроидом Asimo производства компании Honda, который стал воплощением передовых достижений науки и техники. Один из последних образцов Asimo имеет рост 130 см, массу 48 кг, способен передвигаться со скоростью до 9 км/ч.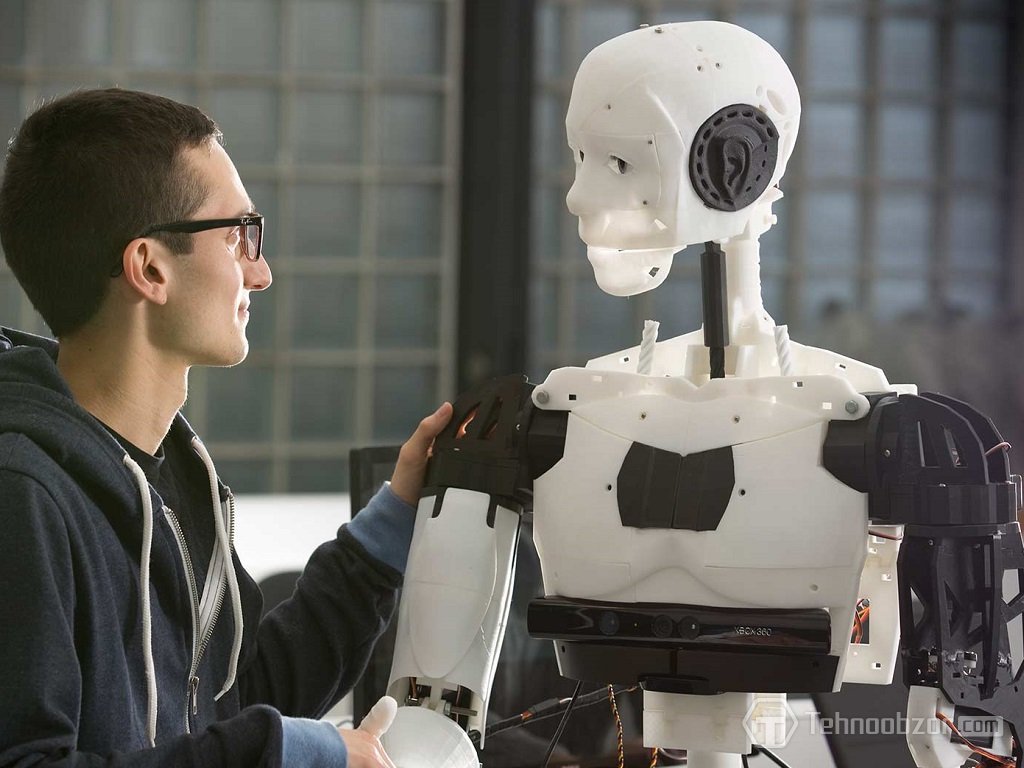 В настоящее время это самый совершенный андроид. Asimo, например, может узнавать знакомые лица людей и обращаться к ним по имени. Всего было выпущено порядка 100 экземпляров этого робота, стоимостью 1 млн долл. каждый.
В настоящее время это самый совершенный андроид. Asimo, например, может узнавать знакомые лица людей и обращаться к ним по имени. Всего было выпущено порядка 100 экземпляров этого робота, стоимостью 1 млн долл. каждый.
Андроид с человеческим лицом
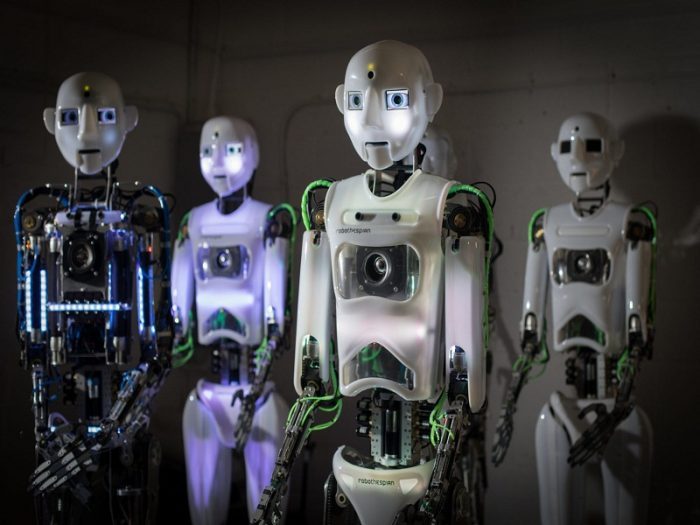
Хотя большинство современных роботов совсем не походят на людей, особым вниманием публики пользуются, как ни странно, именно андроиды. Очевидно, что первые из них будут иметь отнюдь не европейское лицо. Передовой в этом плане является Япония, создавшая настоящий культ роботов. Здесь их конструированием занимаются и крупные корпорации, и народные умельцы, что поощряется правительством.
На эти цели по долгосрочной программе развития роботостроения в 2007-2016гг. Япония планирует направить около 260 млрд долл. Объем продаж продукции робототехнической промышленности к этому времени японцы намерены довести до в 6 трлн иен (73,8 млрд долл). Андроидам отводится особая роль — в будущем они должны стать помощниками в ведении домашнего хозяйства. Предполагается, что к 2025г. в развитых странах домашние роботы станут такими же привычными, как компьютер или стиральная машина. Впрочем, некоторые российские специалисты в области робототехники считают, что андроиды так и останутся дорогими игрушками. «Робот – это узкофункциональная машина, которая должна выполнять определенные задачи, а не универсальный механизм. Поэтому вряд ли домашние андроиды когда-то получат такое же широкое распространение, как современная бытовая техника», — считает завкафедрой робототехнических систем МГТУ им.Баумана Аркадий Ющенко.
Предполагается, что к 2025г. в развитых странах домашние роботы станут такими же привычными, как компьютер или стиральная машина. Впрочем, некоторые российские специалисты в области робототехники считают, что андроиды так и останутся дорогими игрушками. «Робот – это узкофункциональная машина, которая должна выполнять определенные задачи, а не универсальный механизм. Поэтому вряд ли домашние андроиды когда-то получат такое же широкое распространение, как современная бытовая техника», — считает завкафедрой робототехнических систем МГТУ им.Баумана Аркадий Ющенко.
В Стране восходящего солнца ученые, похоже, придерживаются другой точки зрения. Они с энтузиазмом создают свои точные копии-роботы и даже учат их изображать эмоции. Разработками андроидов известен профессор Хироши Ишигуро. Его последняя работа, представленная в апреле 2012г. – девушка-андроид Geminoid F, которая может улыбаться, разговаривать и даже петь. В 2005г. японские ученые предложили покупателям андроида Вакамару, который может не только наводить чистоту в доме, но способен также различать людей по лицам, напоминать о запланированных делах и предупреждать хозяев о попытках взлома их жилища. Правда, стоят такие помощники недешево: цена Вакамару начинается от 15 тыс. долл.
Правда, стоят такие помощники недешево: цена Вакамару начинается от 15 тыс. долл.
И если для среднестатистического покупателя ввиду дороговизны роботы-помощники пока предложение сомнительное, то для бизнеса замена человека машиной с интеллектом выгодна уже сегодня. Это доказывает сделка по покупке американской Amazon, работающей в сфере розничных продаж товаров через Интернет, крупнейшего производителя роботов для логистики — Kiva Systems Inc. Предполагается, что сделка, стоимость которой оценивается в 775 млн долл., будет завершена во втором квартале 2012г. Очевидно, что крупные компании делают ставку на использование роботов вместо того, чтобы держать штат грузчиков. Роботизированные складские системы Kiva используют сегодня компании Crate & Barrel, Gap Inc. и Diapers.com.
Андроид SAR-400 — наш ответ NASA
Все настойчивее диктует применение роботов освоение космоса. Человекоподобный робот «Робонавт-2» (R-2) производства NASA и General Motors в тестовом режиме уже трудится на Международной космической станции. Андроид выглядит как полчеловека (ноги у него отсутствуют) и стоит около 2,5 млн долл.
Андроид выглядит как полчеловека (ноги у него отсутствуют) и стоит около 2,5 млн долл.
В России созданием отечественного аналога «Робонавта» занимается научно-производственное объединение «Андроидная техника» по заказу Федерального космического агентства РФ (Роскосмоса). Российский андроид SAR-400, как и зарубежный, может использоваться для проведения технических и спасательных работ как на самой МКС, так и за ее пределами. Кроме того, он предназначен для «информационно-психологической поддержки экипажа станции». «Фактически это означает возможность общения с роботом для психологической разгрузки», — пояснили в пресс-службе НПО «Андроидная техника». Российский робот-космонавт весит 30 кг при росте 63 см и имеет размах рук-манипуляторов 1,65 м.
От зарубежного он отличается меньшими габаритами и массой, а также возможностью оператора ощущать объект манипулирования — эффект достигается за счет силомоментного отражения усилий. Последнее свойство — своеобразное ноу-хау российских ученых. Роботов, обладающих способностью передавать оператору тактильные ощущения, в мире единицы. SAR-400 работает в нескольких режимах: можно управлять им, надев специальный костюм, и с помощью видеокамер. Электронный помощник космонавтов также может выполнять поручения по заранее заданной программе. Когда российский робокосмонавт присоединится к своему зарубежному коллеге, пока не известно — сроки согласовываются с Роскосмосом. Стоимость работ по созданию SAR-400 в НПО «Андроидная техника» также озвучивать не стали, ссылаясь на то, что проект еще не завершен.
Роботов, обладающих способностью передавать оператору тактильные ощущения, в мире единицы. SAR-400 работает в нескольких режимах: можно управлять им, надев специальный костюм, и с помощью видеокамер. Электронный помощник космонавтов также может выполнять поручения по заранее заданной программе. Когда российский робокосмонавт присоединится к своему зарубежному коллеге, пока не известно — сроки согласовываются с Роскосмосом. Стоимость работ по созданию SAR-400 в НПО «Андроидная техника» также озвучивать не стали, ссылаясь на то, что проект еще не завершен.
Машины-убийцы заменят солдат
Роботизированные системы сегодня широко используются и в военных целях. Судя по инвестициям в эту сферу и темпам ее развития, весьма вероятно, что «терминаторы» с искусственным интеллектом появятся гораздо раньше помощников по хозяйству на батарейках. Боевые роботы чаще всего применяются в разведке и как автоматизированные системы огневой поддержки.
В создании военных машин лидируют США.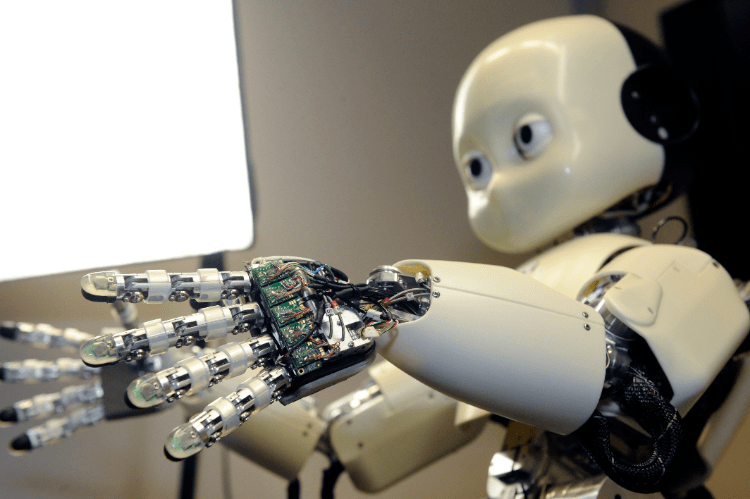 Уже привычными стали операции с применением самолетов-беспилотников. В 2012г. Пентагон планирует закупить более тысячи «карманных» разведывательных роботов Recon Scout XT Throwbot на сумму около 14 млн долл. Кроме того, недавно стало известно о продолжении проекта по созданию беспилотного плавательного аппарата ACTUV, предназначенного для слежения за подводными лодками в открытом океане (в том числе субмаринами, несущими ядерное оружие). Об этом объявило Агентство передовых оборонных исследовательских проектов США (DARPA).
Уже привычными стали операции с применением самолетов-беспилотников. В 2012г. Пентагон планирует закупить более тысячи «карманных» разведывательных роботов Recon Scout XT Throwbot на сумму около 14 млн долл. Кроме того, недавно стало известно о продолжении проекта по созданию беспилотного плавательного аппарата ACTUV, предназначенного для слежения за подводными лодками в открытом океане (в том числе субмаринами, несущими ядерное оружие). Об этом объявило Агентство передовых оборонных исследовательских проектов США (DARPA).
Хотя роботы еще не могут полноценно воевать вместо живых пехотинцев, уже в 2020г. американцы рассчитывают изменить ситуацию. Планы по замене солдат машинами содержатся в докладе о развитии военных роботов в США до 2032г., опубликованном Пентагоном еще в 2007г. Авторы документа отмечают, что за подобными системами большое будущее, а первые образцы автономной военной техники уже доказали свою эффективность в Афганистане и Ираке. В качестве основных преимуществ роботов военные называют отсутствие необходимости пускать в бой живых людей, потенциальную дешевизну в случае массового производства и их повышенные боевые характеристики. Очевидно также, что вооружение для роботов будет многократно превосходить «человеческое» по мощности, скорострельности и точности.
Очевидно также, что вооружение для роботов будет многократно превосходить «человеческое» по мощности, скорострельности и точности.
Разработки боевых роботов активно ведутся и в других странах, в том числе в России. Новый российский танк на базе тяжелой платформы бронетехники «Армата» планируют оснастить цифровой пушкой с дистанционным управлением. Военные эксперты утверждают, что появление такой пушки приблизит Россию к созданию полностью автономных танков-роботов. Впрочем, военный бюджет США ни в какое сравнение не идет с бюджетами других стран. На нужды Пентагона в 2012г. будет потрачено 662 млрд долл., военный бюджет России в текущем году составит 59,1 млрд долл.
Аватар по-русски
Если на военной ниве Россия старается держать марку, памятуя о былом статусе сверхдержавы, то конструированием бытовых роботов в родном отечестве занимаются разве что изобретатели-энтузиасты. Сегодня это направление представлено так называемыми роботами телеприсутствия. С помощью встроенных дисплея, камеры, микрофона и динамиков они позволяют оператору фактически лично присутствовать на любом мероприятии, не вставая из-за компьютера.
Технология напоминает видеоконференцию, однако робот дает свободу передвижения (пользователь с компьютера управляет перемещениями робота, который оборудован двумя ведущими колесами), а за счет его человекоподобных черт достигается эффект присутствия. Такие роботы российского производства напоминают бочкообразного дроида R2-D2 из «Звездных войн», только ростом они повыше (примерно 1,3 м) и выглядят более привлекательно. Крупные компании используют их при организации выставок и рекламных акций в качестве промоутеров и пиарщиков. Первые российские роботы телеприсутствия применяются и в других сферах: при проведении конференций и семинаров, обучении, наблюдении за больными в медучреждениях и др.
С десяток роботов телеприсутствия используются в московских школах, помогая детям учиться. Например, девятиклассник Московского центра образования №166, которому проблемы с сердцем не позволяют посещать заведение, обучается удаленно с помощью такой машины. Отечественный робот-аватар гражданского применения отличается от зарубежных аналогов относительной дешевизной — 3 тыс. долл. За подобные модели Vgo или Anybots QB (производятся в США) придется выложить 6-15 тыс. долл.
долл. За подобные модели Vgo или Anybots QB (производятся в США) придется выложить 6-15 тыс. долл.
Казалось бы, конкурентное преимущество налицо и есть все предпосылки для выхода на зарубежные рынки. Но, как выяснилось, компания, конструирующая таких роботов, чуть ли не единственная в России. «Сама сфера очень наукоемкая и затратная, требующая значительных денежных вложений, — объясняет причину Алексей Князев, директор компании R.bot, производящей роботов телеприсутствия. — У нас нет никаких налоговых льгот, то есть для сферы IT они есть, а для роботостроения почему-то нет. В госпрограмму нас не включили — видимо, посчитали, что в стране нет достаточного количества специалистов, чтобы развивать это направление». Специалисты есть, желание работать — тоже, дело лишь за серьезными инвестициями, да только их нет и не предвидится, отмечает А.Князев. Как выяснилось, похожая ситуация сложилась в нашей стране во всей отрасли в целом.
Семь бед российского роботостроения
Большинство промышленных роботизированных комплексов, роботы для медицины, узлы и элементы для специальных роботов Россия сегодня приобретает за рубежом за баснословные суммы. Уровень роботизации производства специалисты отрасли оценивают как крайне низкий, а отечественные предприятия, занимающиеся конструированием и производством роботов, можно в буквальном смысле пересчитать по пальцам одной руки. После развала Союза на его руинах российское роботостроение так и не сумело пойти в рост. Еще немного, и наверстать упущенное уже не удастся никогда, утверждают эксперты.
Уровень роботизации производства специалисты отрасли оценивают как крайне низкий, а отечественные предприятия, занимающиеся конструированием и производством роботов, можно в буквальном смысле пересчитать по пальцам одной руки. После развала Союза на его руинах российское роботостроение так и не сумело пойти в рост. Еще немного, и наверстать упущенное уже не удастся никогда, утверждают эксперты.
Первая и главная причина – крайне скудное государственное финансирование. Специальной госпрограммы поддержки развития роботостроения в России просто нет. «За последние два созыва ничего подобного в этом плане на уровне законопроектов в Госдуму не вносилось и не принималось, во всяком случае, за последние пять лет точно», — сообщили РБК в пресс-службе комитета Государственной думы РФ по науке и наукоемким технологиям. Не смогли по этому поводу ничего рассказать ни в Минэкономразвития, ни в Минпромторге РФ.
Выручить отечественных роботостроителей могли бы частные инвесторы, однако российский бизнес не спешит вкладывать деньги в долгосрочные проекты. «У российских предпринимателей несколько иная психология, нежели на Западе. Любая экономическая выкладка показывает выгодность инвестиций в высокотехнологичные производства, но как только речь заходит о том, что вложения окупятся лет через 10, интерес к проектам сразу иссякает», — говорит советник директора ЦНИИ робототехники и технической кибернетики Александр Железняков.
«У российских предпринимателей несколько иная психология, нежели на Западе. Любая экономическая выкладка показывает выгодность инвестиций в высокотехнологичные производства, но как только речь заходит о том, что вложения окупятся лет через 10, интерес к проектам сразу иссякает», — говорит советник директора ЦНИИ робототехники и технической кибернетики Александр Железняков.
Другими «болевыми точками» являются отсутствие элементной базы (детали и узлы приходится приобретать за границей) и кадровый голод. «Молодые кадры сегодня составляют около 5%, но не все остаются в отрасли. Опытные профессионалы есть, но они же стареют. И когда уйдут, то этот вакуум, созданный демографической ямой 1990-х, заполнить будет некому», — добавляет А.Железняков.
«В России не только роботостроение, но и машиностроение в целом почему-то не является приоритетным направлением развития», — считает заведующий кафедрой компьютерных систем автоматизации производства МГТУ им.Баумана Сергей Гаврюшин. Он отмечает, что в качестве приоритетных государством определены направления IT, нанотехнологии, транспортные и космические системы, борьба с терроризмом, развитие вооружений, энергетика (речь идет об указе президента РФ «Об утверждении приоритетных направлений развития науки, технологий и техники в РФ», подписанном Д.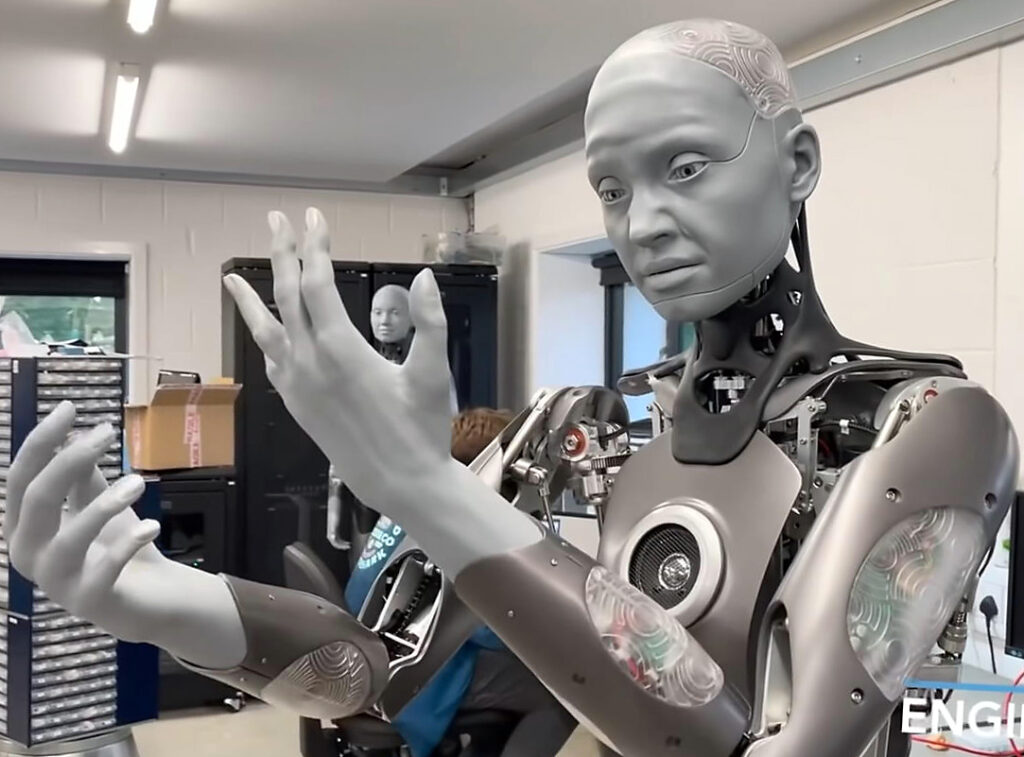 Медведевым 07.07.2011г. – прим. РБК). «Машиностроения среди них нет», — констатирует эксперт. На какой технологической базе будут развиваться все эти нанотехнологии, IT и военные разработки без машиностроения, остается только гадать. По словам С.Гаврюшина, специалисты в отрасли все еще есть, но нет в России крупных проектов, где можно было бы этот научный потенциал реализовать.
Медведевым 07.07.2011г. – прим. РБК). «Машиностроения среди них нет», — констатирует эксперт. На какой технологической базе будут развиваться все эти нанотехнологии, IT и военные разработки без машиностроения, остается только гадать. По словам С.Гаврюшина, специалисты в отрасли все еще есть, но нет в России крупных проектов, где можно было бы этот научный потенциал реализовать.
В заключение надо сказать, что емкость мирового рынка робототехники уже сегодня можно смело оценивать в миллиарды долларов. Однако Россия в обозримом будущем вряд ли сможет претендовать на сколько-нибудь значимый кусок этого пирога. Поэтому осваивать космос у нас еще долго будут живые космонавты, а работать официантами, дворниками и грузчиками — приезжие из СНГ и Средней Азии.
Александр Волобуев, РБК
Мультимодальность для человекоподобного робота / Хабр
Эмоциональный робот Юля
Что такое мультимодальность?
В самом термине заложено, что это симбиоз множества способов извлечения смысла.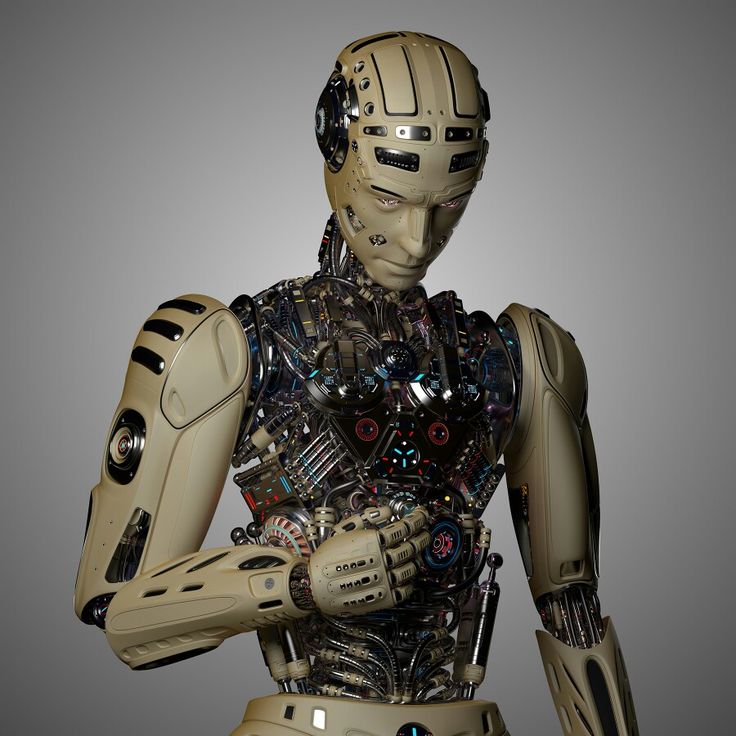 На сегодняшний день это множество включает в себя следующее:
На сегодняшний день это множество включает в себя следующее:
устная речь
письменные источники
аудиоканалы
жесты
тактильная информация
визуальные каналы
пространственное восприятие
полученный предыдущий опыт
Последнее добавляет в плоскостную структуру мультимодальности ещё и ось времени. Теперь попробуем понять, насколько хорошо робот может обрабатывать все перечисленные типы информации. И забегая вперед, можно сказать, что каждый из каналов по отдельности роботы научились обрабатывать уже с достаточно высоким качеством, а в некоторых случаях модели распознавания превосходят в этом даже человека. Однако собирать полученную информацию со всех каналов в “точке смысла” умеет лишь человек, и на вопрос как он это делает в научных и промышленных кругах пока нет полного и однозначного ответа.
Мы в команде Промобот пробуем определить подход в разработке мультимодальности, отвечающий пользовательским требованиям, предъявляемым к современным человекоподобным роботам.
Что такое человекоподобный робот?
Робот Юля (Промобот)
Понятие «Человекоподобный робот» имеет ряд определений в научной литературе в зависимости от области исследования и сферы применения.
Например, в исследованиях по мехатронике наиболее часто встречающимися будут термины Automaton и Mechanical doll. В робототехнике мы используем Machine Human, Simulation robot, Beauty robot. В трудах по философии можно встретить – Lifelike robot, Realistic robot. А в социологии – Human-like, Humanoid, Antropomorphic, Avatar. В научной фантастике роботов разделяют даже по половому признаку. Так Android (робот-мужчина), Gynoid (робот-женщина), Droid (робот среднего рода) и Cyborg (кибернетический организм).
Как мы видим, определений достаточно много и, возможно, этот список еще можно дополнить. Мы проводим социологические опыты по мультимодальности и поэтому будем использовать в дальнейшем термин “человекоподобный робот”.
Мы проводим социологические опыты по мультимодальности и поэтому будем использовать в дальнейшем термин “человекоподобный робот”.
План исследования
В широкой перспективе мы запланировали 4 этапа исследования, которое поможет создать не только схемы распознавания мультимодальных сообщений в парадигме Человек-Робот, но и оттестировать модели генерации мультимодальности в парадигме Робот-Человек. Таким образом, круг замкнется и будет оттестирована полная парадигма взаимодействия Человек-Робот-Человек.
Ключ к определению схемы Человек-Робот вероятнее всего лежит в поле исследований, связанных с когнитивными моделями, теорией разума и методами HRI. Эти три направления являются основным источником идей для всех, кто хотел бы научиться делать человекоподобных роботов.
Наш Топ-10 наиболее популярных открытий HRI в мире:
Внешность может нести определяющее значение в том, как человек воспринимает робота. Установлено, что люди демонстрируют негативные социальные и эмоциональные реакции, а также сниженное доверие к человекоподобным роботам, если последние имеют изъяны во внешности и поведении (эффект «Зловещей долины» Масахиро Мори)
Качественная имитация на роботах человеческой манеры поведения, жестов, языка тела, мимики с помощью технологий телеприсутствия способна нивелировать негативное отношение и повысить процент положительных эмоций от общения (Джон П.
 Уитни)
Уитни)В случаях, когда роботы настойчиво навязывают общение и не соблюдают «безопасное расстояние» (вторгаясь в личное пространство пользователя), человек испытает негативные эмоции и предпочтет обратиться скорее к другому человеку, чем к роботу (Чад Эдвардс)
Если робот не активен совсем, это тоже способно вызывать негативные эмоции. Робот воспринимается как бесполезный, и его присутствие начинает раздражать (Хироши Исигуро)
Если робот не отвечает ожиданиям пользователя, это способствует формированию негативного тренда в отношении робота. Люди вкладывают в понятие робот характеристики из научной фантастики, которые не реализованы или не реализуемы на текущем уровне развития технологий, и обязательно разочаровываются, когда реальный робот не может делать ничего из выдуманного (Чад Эдвардс)
Эмоции робота как правило человек приравнивает к человеческим. И если их проявление у робота имеет изъяны это вызывает отторжение. Зловещая долина – может быть просто эффект отторжения к людям с дефектами, это заложено эволюцией (Хироши Исигуро)
Если роботы используют небуквальный язык, например сарказм или иронию в некорректных случаях, люди относятся к этому с таким же снисхождением, как и в ситуации с обычными людьми и способны простить ошибки употребления (Хайме Банкс)
В соответствии с гипотезой контакта (Гордон Олпорт), контролируемое (сценарное) взаимодействие с социальным роботом может уменьшить неопределенность на старте общения и повысить готовность взаимодействовать с роботом
Физический контакт с роботом, прикосновения, рукопожатия со стороны пользователя уменьшают негатив, и страхи, сформированные еще до общения с роботом, нивелируются (Марлена Фроне)
Нашему мозгу все равно кого (робота или человека) и как воспринимать (как робота, как человека), главное, чтобы ожидания не расходились с реальностью, а это дело привычки, которую надо формировать (Айсе Пинар Саюгин)
 Уитни)
Уитни)С учетом этих выводов мы сформировали ряд гипотез на проверку.
Наши гипотезы:
Основная задача машин — дарить впечатления людям. Роботы справляются с этой задачей в целевых сценариях и это способствует повторному визиту пользователя при применении одного из трех подходов. Мы их назвали базовый, гибридный и имитационный
Человек не обращает внимание на вид и на манеру общения робота совсем, если не имеет завышенных ожиданий. Таким образом, если робот используется в сферах, где он приходит на замену текущим устройствам в качестве «горизонтального обновления», он несет больший потенциал для создания положительного впечатления у пользователя (Наиболее яркий пример в истории, когда автомобиль вытеснил гужевой транспорт с дорог).
Примечания к первой гипотезе:
Базовый подход основывается на принципах автономности робота и опирается только на функционал в рамках текущего уровня развития технологий;
Гибридный подход опирается на технологию работы робота в связке с человеком, так называемый, дополненный интеллект;
Имитационный подход опирается на технологии телеприсутствия.

В рамках каждого из трех подходов по первой гипотезе тестируется какой из параметров и в какой мере влияет на положительное восприятие робота человеком.
Тестируемые параметры:
эмоции на уровне текста;
голос и интонация, приближенные к человеческому уровню воспроизведения: на уровне синтеза робота, обработанной аудиозаписи голоса актера под синтез робота, эмоционального голоса актера без наложений;
эмотиконы на «лице» робота;
жесты, мимика и язык тела;
поддержание диалога в соответствии с транзакционной моделью Э. Бёрна;
fallback — ответ робота в случаях, когда он не знает ответа в соответствии с сентимент анализом и транзакционной моделью Э. Бёрна.
Методика тестирования гипотез:
Робот Юля (Промобот)
Для тестирования гипотез мы использовали 2 типа интервью: интервью с пользователем-владельцем в рамках custdev мультимодальности и интервью пользователя с роботом в рамках заданного сценария с подключаемыми/отключаемыми опциями.
Дополнительно мы использовали экспертную оценку наших разработчиков и архитектора диалоговой системы Промобот. Так появился целостный подход к выявлению концепции социального робота для бизнеса способного обрабатывать мультимодальность. Весь процесс был поделен на 4 этапа.
На первом этапе мы хотели выявить какие из каналов мультимодальности и, самое главное, в каких проявлениях нужны современному пользователю (custdev).
Затем мы запланировали проверить релевантность некоторых из пользовательских требований, а также их действительное влияние на человека. Для этого мы создали несколько сценариев, где были учтены некоторые из пользовательских требований и предоставили пользователям возможность пройти их на роботе. Цель — замерить показатели эффективности: как выглядят метрики клиента в общении с роботом, с человеком и с гибридом.
На третьем этапе (об этом в следующих статьях) должны появиться требования от разработки и схемы мультимодальности на основе механизмов формирования положительных эмоций у человека, которые также пройдут фильтр тестирования. И, наконец, будет определена модель мультимодальности, отвечающей пользовательским требованиям, предъявляемым к современным роботам и формат ее заполнения.
И, наконец, будет определена модель мультимодальности, отвечающей пользовательским требованиям, предъявляемым к современным роботам и формат ее заполнения.
Этап 1: Custdev по мультимодальности на уровне Человек-Робот
Робот Юля (Промобот)
Сбор информации на первом этапе осуществлялся в течение 6 месяцев путем интервьюирования, в ходе которого владельцу робота после общения с Promobot V4 задавалось 2 вопроса: «Чего вам не хватает в функционале робота?» и «Для чего вам нужен данный функционал?».
Ответы владельцев мы разделили на несколько групп по модулям реализации, а также кластеризовали их по типам аргументации для удобства дальнейшего анализа нашими разработчиками и формирования MVP на основе подхода “посмотреть, что нужно пользователю и приземлить на то, что можем реализовать на текущий момент мы”. Ниже в таблице представлены результаты.
Таблица 1: Ожидания от робота VS Что мы можем дать и с каким качеством
По итогу, custdev продемонстрировал высокую осведомленность владельцев роботов на счет технических ограничений в реализации функционала робота (видимо наша техническая поддержка очень хорошо выполняет свою работу). Однако при формировании запросов все равно наблюдается “полет фантазии”, и мы склоняемся здесь к тому, что конечный пользователь также сильно влияет на владельца. Предполагаем, что некоторые из требований попадут в long-list после оценки разработчиков и архитектора Диалоговой системы Промобот.
Однако при формировании запросов все равно наблюдается “полет фантазии”, и мы склоняемся здесь к тому, что конечный пользователь также сильно влияет на владельца. Предполагаем, что некоторые из требований попадут в long-list после оценки разработчиков и архитектора Диалоговой системы Промобот.
Этап 2: Генерация мультимодальности на уровне Робот-Человек
Yaskawa-kun, робот-мороженщик
Аналитика ответов и подготовка к третьему этапу идет своим чередом. А мы параллельно запустили второй этап – внутреннее тестирование мультимодальности. На втором этапе был разработан сценарий под кодовым названием “Мороженщик” на основе транзакционного анализа.
Пользователю необходимо было пройти сценарий 3 раза с тремя разными персонажами. У каждого персонажа был свой голос ((1) робо-синтез, (2) актерская озвучка, (3) актерская озвучка, адаптированная под робо-синтез), своя манера общения и эмотиконы, предполагался также свой язык тела. Помимо этого, когда робот не знал ответа, сентимент анализ помогал ему сообщить об этом пользователю в соответствии со схемой транзакционного анализа и тем самым снять эмоциональное напряжение и продолжить диалог. На выходе оценивалось как пользователь воспринимает образ, где он дошел до конца сценария, и с кем ему было общаться наиболее комфортно. На текущем этапе тестирование в самом разгаре.
На выходе оценивалось как пользователь воспринимает образ, где он дошел до конца сценария, и с кем ему было общаться наиболее комфортно. На текущем этапе тестирование в самом разгаре.
А мы, не дожидаясь его результатов уже спланировали третий, который позволит понять в рамках какого функционала наш робот будет наиболее востребованным для бизнеса.
Этап 3: Методика работы с ожиданиями пользователя на уровне обработки мультимодальности
Чтобы провести третий этап в соответствии с установками нам понадобилось “приземлить ожидания пользователя” на существующие методики и технологии. Мы использовали для разных типов сценария следующие подходы:
Базовый
Скромный, но дающий в определенной мере предполагаемый “WOW-эффект”. Здесь робот будет минимально антропоморфным при оценках человеком, что выглядит вполне понятным даже для него самого. Поэтому сделать так, чтобы видели не робота, а его функционал и оценивали только то, как хорошо выполняется задача, является программой максимум.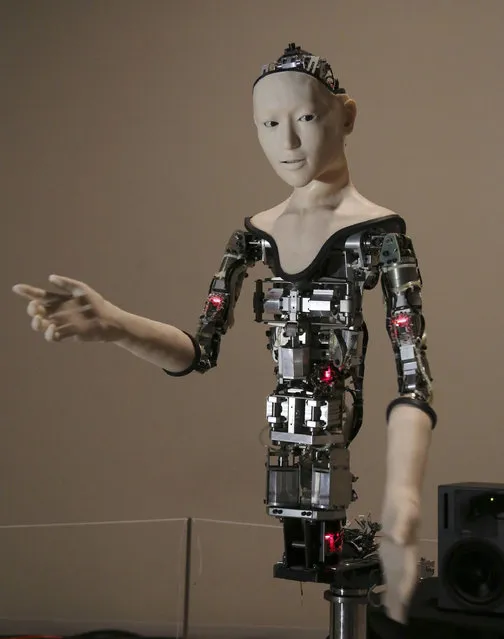
В случае применения только базового функционала не нужно, чтобы люди пытались полноценно сравнивать такого робота с человеком, его могут воспринимать как дроида, которого можно создать по любому подобию и у него будет:
своя модель речи, жестов, распознавания, мимики построенных на понятных технологиях NLP, CV, ASR, TTS, с применением различных сенсоров, алгоритмов на основе когнитивной лингвистики (грамматики конструкций), векторной семантики и многих других моделей. У таких роботов могут быть суперспособности, например, возможность говорить на языке животных (как в фильме Финч (2021))
свой способ передвижения — колеса
свой способ познания мира (база знаний)
свой тип поведения
Гибридный
Робот-ассистент и ассистент для робота
Может быть достигнут с помощью гибридных методов: amplified intelligence. Так для выработки привычки взаимодействия с роботом на основе базового функционала необходим консультант со знанием сценария взаимодействия с роботом и периодично его демонстрирующий в окружении людей тем самым провоцируя их повторять только сценарные действия и улучшая фон удовлетворенности от общения с роботом (Так внедряли терминалы и банкоматы Сбера, так это работает с презентацией любого нового продукта на выставке).
Имитационный
Робот, управляемый человеком
Здесь речь идет о технологиях телеприсутствия. Максимально скопировать человека может сегодня только человек. Эта история про автоматоны в витрине магазина еще в детстве заставляла меня прилипать на час другой к витрине “Детского мира” в Хельсинки, робот манекен в витрине, который двигается и привлекает внимание к новой коллекции. Данный вариант по сей день актуален и несет ценность, пусть даже и для тестирования гипотез.
С точки зрения технологий робота уже не будут пытаться полноценно сравнивать с человеком, его воспримут как дроида, которого мы можем создать по любому подобию, но вместе с тем мы сталкиваемся с фактом, что такой подход является нерасширяемым.
Чтобы реализовать данный подход сценарий “Мороженщик” будет расширен и размножен на трех разных подходах, а затем оттестирован на пользователях.
Планируется собрать фидбек по следующему пулу вопросов:
Какой сценарий вызывает наибольший отклик и приятие?
Какие минусы у каждого из трех сценариев в плане реализации?
Какие плюсы у каждого из трех сценариев в плане реализации?
Что нужно добавить, чтобы сценарии заставляли вас возвращаться снова и снова
Правильно (ожидаемо) ли отработали мультимодальные (эмоции, жесты, мимика) схемы на роботе?
Вернетесь ли к этому роботу еще за мороженным?
Хотите купить этого робота?
Выводы
О выводах пока говорить рано.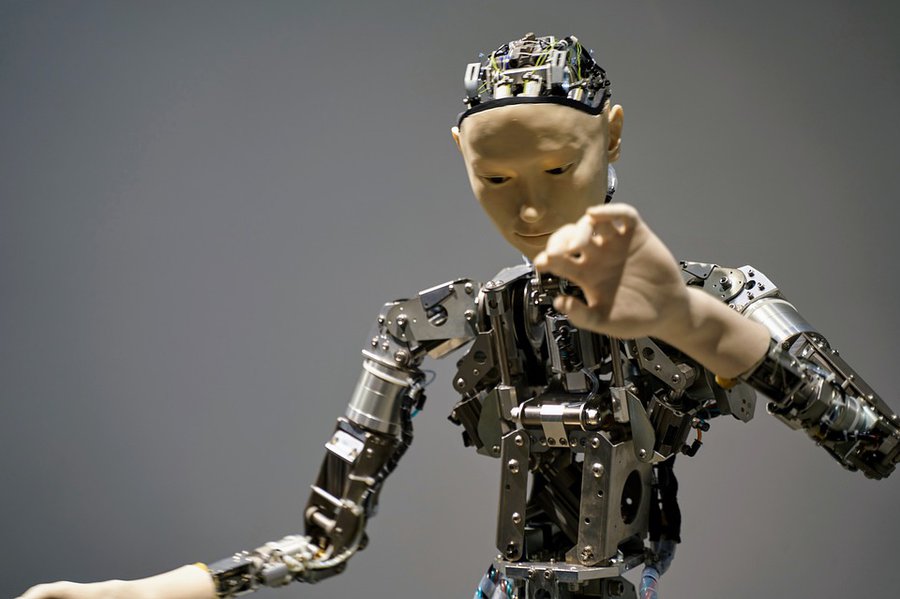 Ждем результатов всех этапов и проработки 4 этапа, который позволит объединить весь собранный материал воедино и создать впервые подход в разработке мультимодальности, отвечающий пользовательским требованиям, предъявляемым к современным человекоподобным роботам.
Ждем результатов всех этапов и проработки 4 этапа, который позволит объединить весь собранный материал воедино и создать впервые подход в разработке мультимодальности, отвечающий пользовательским требованиям, предъявляемым к современным человекоподобным роботам.
Дальнейшая работа
Робот Юля (Промобот)
Предварительный анализ показал, что пользовательские требования, собранные в основном от владельцев роботов, не всегда имеют связь с реальностью. Поэтому проработка возможностей технологий на предмет максимального удовлетворения запросов пользователей является также необходимой. Что является не менее важным — это правильно собрать поведенческий модуль робота. Тестирование четвертого этапа должно, во-первых, позволить собрать данные полученные на первых трех этапах в единый поведенческий модуль, а, во-вторых, установить режимы работы модуля в целом. Об этом мы напишем в последующих публикациях. Продолжение следует…
Ссылки
Lakоff, G. (1987). Women, Fire, and Dangerous Things.
What Categories Reveal about the Mind. Гл. 1, 17.Бёрн, Э . (2009). Трансакционный анализ в психотерапии / Пер. с англ. А.А. Грузберга, М.: Эксмо, 416 с.
Baron-Cohen, S. (1991). Precursors to a theory of mind: Understanding attention in others. In A. Whiten (Ed.), Natural theories of mind: Evolution, development, and simulation of everyday mindreading. Oxford: Basil Blackwell, 233-251.
Kahn, Peter H.; Ishiguro, Hiroshi; Friedman, Batya; Kanda, Takayuki (2006-09-08). What is a Human? — Toward Psychological Benchmarks in the Field of Human-Robot Interaction. ROMAN 2006 — the 15th IEEE International Symposium on Robot and Human Interactive Communication, 364-371.
Edwards, Chad; Edwards, Autumn; Spence, Patric R.; Westerman, David (21 December 2015). Initial Interaction Expectations with Robots: Testing the Human-To-Human Interaction Script. Communication Studies. 67 (2): 227-238
Mori, M. (1970/2012). The uncanny valley (K.
F. MacDorman & N. Kageki, Trans.). IEEE Robotics & Automation Magazine, 19(2), 98-100. Distributed Little Red Hen Lab “Multimodal communication research” https://github.com/RedHenLab
 What Categories Reveal about the Mind. Гл. 1, 17.
What Categories Reveal about the Mind. Гл. 1, 17.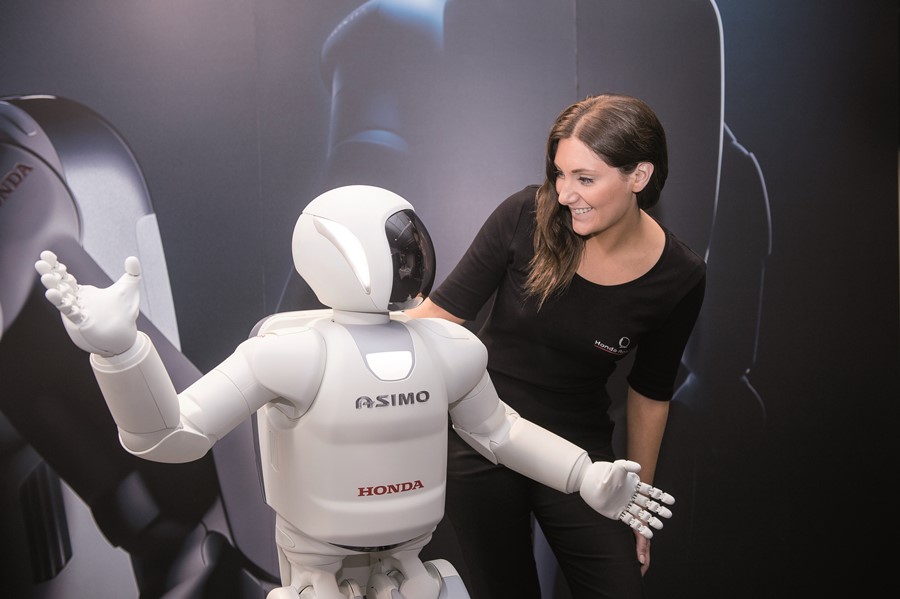 F. MacDorman & N. Kageki, Trans.). IEEE Robotics & Automation Magazine, 19(2), 98-100.
F. MacDorman & N. Kageki, Trans.). IEEE Robotics & Automation Magazine, 19(2), 98-100. Современная робототехника: достижения и направления развития
Основные тенденции современной робототехники
Изделия робототехники сегодня отличаются высоким качеством, надежностью и широким кругом возможностей.
В связи с этим наблюдается популяризация роботов среди населения. Это отражается не только в том, что образы роботов часто мелькают по телевизору и в рекламных буклетах, но и в том, что каждый человек может использовать роботизированные устройства в быту, взаимодействовать с ними на развлекательных и торговых площадках, а производства оснащаются роботами для увеличения производительности и качества продукции.
Роботы начинают взаимодействовать с людьми.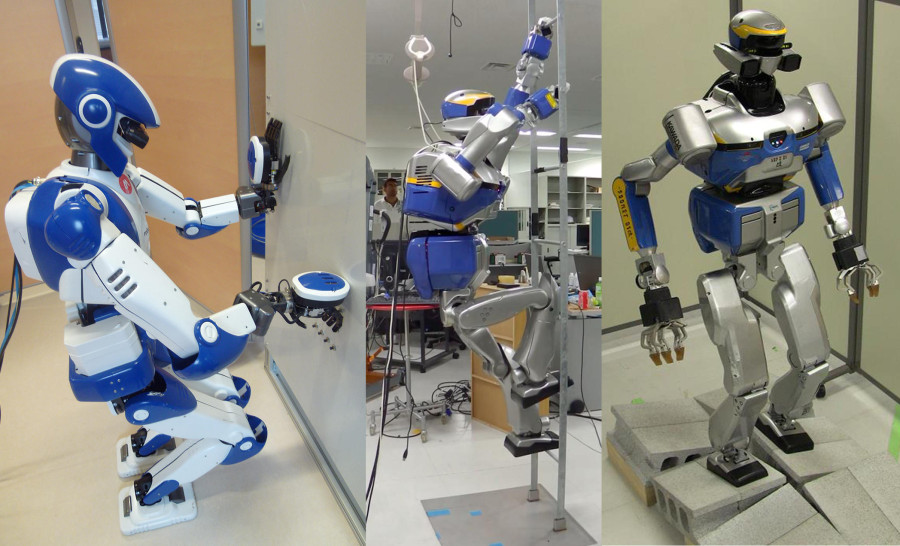 Это проявляется как в создании экзоскелетных комплексов, так называемых «костюмов-роботов», так и в разработке систем, способных к обучению. Последние имеют возможность копировать действия оператора и воспроизводить их. Это касается не только простых монотонных операций, но и сложных производственных процессов.
Это проявляется как в создании экзоскелетных комплексов, так называемых «костюмов-роботов», так и в разработке систем, способных к обучению. Последние имеют возможность копировать действия оператора и воспроизводить их. Это касается не только простых монотонных операций, но и сложных производственных процессов.
Одновременно с этим увеличиваются и финансовые вложения в область робототехники. Это означает, что появляются возможности создавать все более сложные и технически совершенные конструкции, проводить длительные исследования и испытания.
Пожалуй, самыми важными тенденциями в развитии современной робототехники являются внедрение и совершенствование систем компьютерного зрения и искусственного интеллекта. Благодаря новым разработкам увеличиваются степень свободы роботов и качество их адаптации под изменения внешней среды.
Типичными представителями изделий роботостроения являются робот-манипулятор, экзоскелет для человека, человекоподобный робот. Передовые разработки предполагают внедрение искусственного интеллекта, компьютерного зрения, сложнейших датчиков и устройств, дающих роботам практически полную свободу действий.
Передовые разработки предполагают внедрение искусственного интеллекта, компьютерного зрения, сложнейших датчиков и устройств, дающих роботам практически полную свободу действий.
Робот-манипулятор: производство и назначение
Роботы-манипуляторы представляют собой сложные устройства, действующие по заранее заложенной в их систему управления программе.
Они получили очень широкое распространение на производственных предприятиях, помогая облегчить погрузочно-разгрузочные операции, сборку и обработку изделий и многие другие технологические процессы. Сфер применения современных промышленных роботов огромное количество.
Технология производства промышленных роботов постоянно совершенствуется. Если раньше манипуляторы представляли собой статичные устройства, способные двигаться в одной или нескольких плоскостях, то сегодня роботы могут перемещаться по территории производственного комплекса для выполнения своих задач, благодаря компьютерному зрению они работают точно и быстро, а с развитием искусственного интеллекта они оперативно подстраиваются под изменяющиеся условия, обучаются у человека новым навыкам и принимают решения на основе собственного опыта.
Несомненно, такие сложные системы для выполнения большого количества функций имеют множество соединений и узлов трения.
Обеспечить стабильную и длительную работу такого оборудования позволяют инновационные смазочные материалы, такие как антифрикционные твердосмазочные покрытия.
Например, на шестерни рулевых механизмов роботов-манипуляторов на этапе их производства наносится покрытие MODENGY 1014.
Оно формирует тонкий разделительный слой, снижающий трение и повышающий плавность перемещения деталей.
Разработчики роботов выбирают такие смазочные материалы за их длительный срок службы, что позволяет исключить необходимость обслуживания узлов роботов и требуемую для этого остановку их работы.
Экзоскелет для человека
Робот-экзоскелет – это мобильное носимое роботизированное устройство, предназначенное для восполнения утраченных человеком функций.
Разработка таких механизмов имеет особую социальную значимость, поэтому их совершенствованию и распространению современная робототехника уделяет повышенное внимание.
Типичное применение экзоскелетов – реабилитация пациентов, перенесших тяжелые болезни и сложные операции. Развивается использование роботизированных костюмов и для людей, полностью лишенных способности к активности. В перспективе планируется полностью заменить экзоскелетами инвалидные кресла.
Медицина – не единственная область использования экзоскелетов. Промышленные предприятия внедряют носимые системы для снижения нагрузки на опорно-двигательную систему персонала в процессе выполнения им сложной физической работы.
Военные экзоскелеты значительно улучшают физические качества бойцов – силу, выносливость, ловкость, скорость. Они разрабатываются как часть боевой экипировки.
Человекоподобный робот
Современная робототехника способна производить человекоподобных роботов, которые копируют внешность и возможности людей.
Если робот-манипулятор, экзоскелет и другие виды изделий роботостроения имитируют работу конкретных частей человеческого тела, то роботы-андроиды воспроизводят его полностью.
Выглядеть и действовать как человек – главное назначение такого робота. С первого взгляда бывает сложно правильно идентифицировать синтетический организм, не спутав его с человеком.
Человекоподобный робот обладает искусственным интеллектом, может обрабатывать визуальную информацию и идентифицировать речь и жесты людей.
Распространено создание роботов-копий известных личностей, которые могут поддерживать простую беседу на определенные темы, воспроизводить жесты и мимику, характерные для человека.
Xenobots: первые в мире живые роботы теперь могут размножаться, говорят ученые
Подпишитесь на информационный бюллетень CNN по теории чудес. Исследуйте вселенную, получая новости об удивительных открытиях, научных достижениях и многом другом .
Исследуйте вселенную, получая новости об удивительных открытиях, научных достижениях и многом другом .
Си-Эн-Эн
—
Американские ученые, создавшие первых живых роботов, говорят, что формы жизни, известные как ксеноботы, теперь могут воспроизводиться, причем способом, невиданным у растений и животных.
Сформированные из стволовых клеток африканской когтистой лягушки (Xenopus laevis), от которой она и получила свое название, ксеноботы имеют ширину менее миллиметра (0,04 дюйма). Крошечные капли были впервые обнаружены в 2020 году после того, как эксперименты показали, что они могут двигаться, работать вместе в группах и самоисцеляться.
Теперь ученые, разработавшие их в Университете Вермонта, Университете Тафтса и Институте биологической инженерии Висса Гарвардского университета, заявили, что обнаружили совершенно новую форму биологического воспроизводства, отличную от любого животного или растения, известного науке.
«Я был поражен этим», — сказал Майкл Левин, профессор биологии и директор Центра открытий Аллена в Университете Тафтса, который был одним из ведущих авторов нового исследования.
«У лягушек есть способ размножения, который они обычно используют, но когда вы… освобождаете (клетки) от остальной части эмбриона и даете им шанс понять, как быть в новой среде, они не только выясняют новый способ передвижения, но они также, по-видимому, придумали новый способ размножения».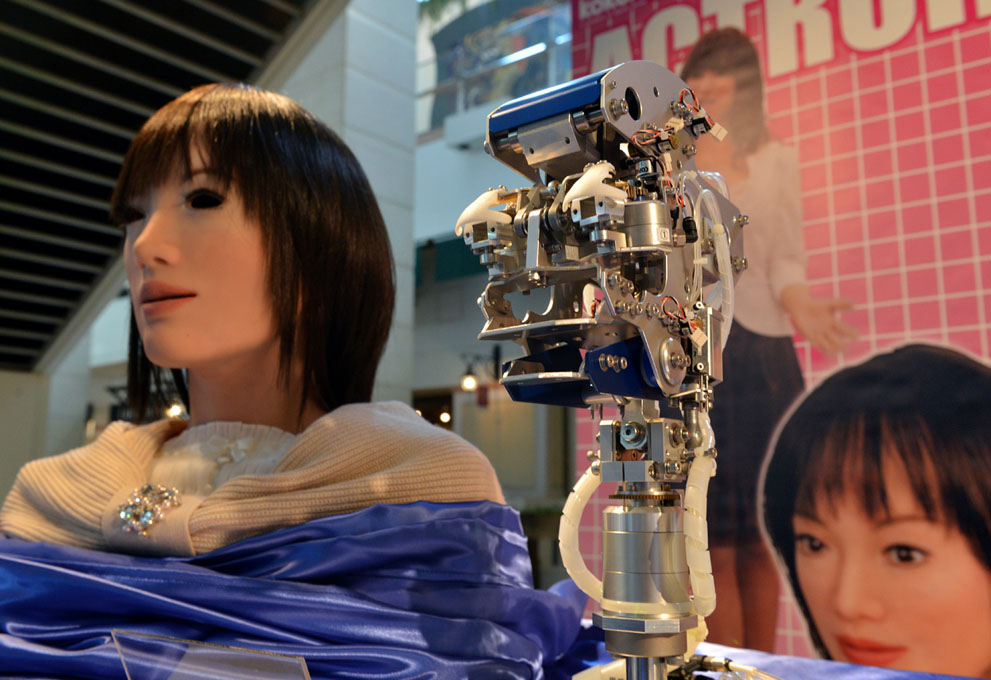
Стволовые клетки — это неспециализированные клетки, которые способны развиваться в различные типы клеток. Чтобы создать ксеноботов, исследователи соскоблили живые стволовые клетки с эмбрионов лягушек и оставили их инкубироваться. Здесь нет никаких манипуляций с генами.
«Большинство людей думают, что роботы сделаны из металлов и керамики, но важно не столько то, из чего сделан робот, сколько то, что он делает, то есть действует сам по себе от имени людей», — сказал Джош Бонгард, профессор компьютерных наук. и эксперт по робототехнике в Университете Вермонта и ведущий автор исследования.
 cms.cnn.com/_components/paragraph/instances/paragraph_5839F896-5A9F-54A9-80EF-6C91069A1F1D@published» data-editable=»text» data-component-name=»paragraph»>
cms.cnn.com/_components/paragraph/instances/paragraph_5839F896-5A9F-54A9-80EF-6C91069A1F1D@published» data-editable=»text» data-component-name=»paragraph»>
«В этом смысле это робот, но это также явно организм, сделанный из генетически немодифицированной клетки лягушки».
Бонгард сказал, что они обнаружили, что ксеноботы, которые изначально имели форму сферы и состояли примерно из 3000 клеток, могли воспроизводиться. Но это случалось редко и только при определенных обстоятельствах. По словам Бонгарда, ксеноботы использовали «кинетическую репликацию» — процесс, который, как известно, происходит на молекулярном уровне, но никогда ранее не наблюдался в масштабе целых клеток или организмов.
Затем с помощью искусственного интеллекта исследователи проверили миллиарды форм тела, чтобы сделать ксеноботов более эффективными в этом типе репликации. Суперкомпьютер придумал С-образную форму, напоминающую Pac-Man, видеоигру 1980-х годов. Они обнаружили, что он может найти крошечные стволовые клетки в чашке Петри, собрать сотни из них во рту, и через несколько дней пучок клеток превратился в новых ксеноботов.
Суперкомпьютер придумал С-образную форму, напоминающую Pac-Man, видеоигру 1980-х годов. Они обнаружили, что он может найти крошечные стволовые клетки в чашке Петри, собрать сотни из них во рту, и через несколько дней пучок клеток превратился в новых ксеноботов.
«ИИ не программировал эти машины так, как мы обычно думаем о написании кода. Он формировал и лепил и придумал форму Pac-Man», — сказал Бонгард.
«Форма — это, по сути, программа. Форма влияет на поведение ксеноботов, усиливая этот невероятно удивительный процесс».
Ксеноботы — это очень ранняя технология — вспомните компьютер 1940-х годов — и пока не нашли практического применения. Однако, по мнению исследователей, эта комбинация молекулярной биологии и искусственного интеллекта потенциально может быть использована для решения множества задач в организме и окружающей среде. Это может включать в себя такие вещи, как сбор микропластика в океанах, осмотр корневых систем и регенеративная медицина.
Однако, по мнению исследователей, эта комбинация молекулярной биологии и искусственного интеллекта потенциально может быть использована для решения множества задач в организме и окружающей среде. Это может включать в себя такие вещи, как сбор микропластика в океанах, осмотр корневых систем и регенеративная медицина.
Хотя перспектива самовоспроизводящихся биотехнологий может вызвать беспокойство, исследователи заявили, что живые машины полностью содержались в лаборатории и легко тушились, поскольку они биоразлагаемы и регулируются экспертами по этике.
Исследование частично финансировалось Агентством перспективных оборонных исследовательских проектов, федеральным агентством, которое наблюдает за развитием технологий для использования в военных целях.
«Есть много вещей, которые возможны, если мы воспользуемся такой пластичностью и способностью клеток решать проблемы», — сказал Бонгард.
Исследование было опубликовано в рецензируемом научном журнале PNAS в понедельник.
Джесси Юнг из Гонконга внесла свой вклад в этот отчет
Команда создает первых живых роботов, которые могут размножаться
Ксеноботы, разработанные ИИ, раскрывают совершенно новую форму биологического самовоспроизведения, перспективную для регенеративной медицины
Джошуа Браун, University of Vermont Communications сохраняться, жизнь должна воспроизводиться. За миллиарды лет организмы развили множество способов размножения, от почкующихся растений до половых животных и вторжения вирусов.
За миллиарды лет организмы развили множество способов размножения, от почкующихся растений до половых животных и вторжения вирусов.
Созданные искусственным интеллектом (С-образные) организмы сталкивают свободные стволовые клетки (белые) в груды, когда они перемещаются в окружающей среде. Авторы и права: Дуглас Блэкистон и Сэм Кригман.
Теперь ученые из Университета Вермонта, Университета Тафтса и Института биологической инженерии Висса в Гарвардском университете открыли совершенно новую форму биологического воспроизводства и применили свое открытие для создания первого в мире , самовоспроизводящиеся живые роботы.
Та же команда, которая построила первых живых роботов («ксеноботов», собранных из клеток лягушек — отчет в 2020 г.), обнаружила, что эти созданные компьютером и собранные вручную организмы могут плавать в своей крошечной чашке, находить отдельные клетки, собирать сотни из них вместе и собирают «детей» ксеноботов внутри своего «рта» в форме Pac-Man, которые через несколько дней становятся новыми ксеноботами, которые выглядят и двигаются так же, как они сами.
И тогда эти новые ксеноботы могут выходить, находить клетки и создавать копии самих себя. Опять и опять.
«При правильном дизайне они будут спонтанно самовоспроизводиться», — говорит Джошуа Бонгард, доктор философии, ученый-компьютерщик и эксперт по робототехнике из Университета Вермонта, один из руководителей нового исследования.
Результаты нового исследования были опубликованы 29 ноября 2021 года в журнале Proceedings of the National Academy of Sciences.
В неизвестность
По мере того, как «родители» ксеноботов в форме Пакмена перемещаются по окружающей среде, они собирают свободные стволовые клетки в своих «ртах», которые со временем объединяются для создания «потомков» ксеноботов, которые развиваются, чтобы выглядеть точно так же, как их создатели. Кредит: Дуг Блэкистон и Сэм Кригман
У лягушки Xenopus laevis эти эмбриональные клетки разовьются в кожу. «Они сидели бы снаружи головастика, защищая от патогенов и перераспределяя слизь», — говорит Майкл Левин, доктор философии, профессор биологии и директор Центра открытий Аллена в Университете Тафтса и один из руководителей нового исследования. исследовательская работа. «Но мы помещаем их в новый контекст. Мы даем им шанс переосмыслить свою многоклеточность». Левин также является ассоциированным преподавателем Института Висса.
исследовательская работа. «Но мы помещаем их в новый контекст. Мы даем им шанс переосмыслить свою многоклеточность». Левин также является ассоциированным преподавателем Института Висса.
И то, что они представляют себе, совсем не похоже на кожу. «Люди довольно долго думали, что мы разработали все способы, которыми жизнь может воспроизвести или воспроизвести. Но это то, чего никогда раньше не наблюдалось», — говорит соавтор Дуглас Блэкистон, доктор философии, старший научный сотрудник Университета Тафтса и Института Висса, который собрал «родителей» ксеноботов и разработал биологическую часть нового исследования.
«Это глубоко», — говорит Левин. «Эти клетки имеют геном лягушки, но, освободившись от превращения в головастиков, они используют свой коллективный разум, пластичность, чтобы делать нечто поразительное». В более ранних экспериментах ученые были поражены тем, что ксеноботы могут быть созданы для выполнения простых задач. Теперь они ошеломлены тем, что эти биологические объекты — созданная компьютером коллекция клеток — могут спонтанно воспроизводиться. «У нас есть полный, неизмененный геном лягушки, — говорит Левин, — но он не дает нам ни малейшего намека на то, что эти клетки могут работать вместе над этой новой задачей — собирать и затем сжимать отдельные клетки в работающие самокопии.
«У нас есть полный, неизмененный геном лягушки, — говорит Левин, — но он не дает нам ни малейшего намека на то, что эти клетки могут работать вместе над этой новой задачей — собирать и затем сжимать отдельные клетки в работающие самокопии.
«Эти клетки лягушки реплицируются способом, который сильно отличается от того, как это делают лягушки. Ни одно известное науке животное или растение не размножается таким образом», — говорит Сэм Кригман, доктор философии, ведущий автор нового исследования, защитивший докторскую диссертацию. в лаборатории Бонгарда в UVM, а в настоящее время является постдокторантом в Центре Аллена Тафта и Институте биологически вдохновленной инженерии Висса Гарвардского университета.
Сам по себе родительский ксенобот, состоящий примерно из 3000 клеток, образует сферу. «Они могут делать детей, но после этого система обычно умирает. На самом деле очень сложно заставить систему продолжать воспроизводиться», — говорит Кригман. Но с помощью программы искусственного интеллекта, работающей на кластере суперкомпьютеров Deep Green в Вермонтском вычислительном ядре UVM, эволюционный алгоритм смог протестировать миллиарды форм тела в моделировании — треугольники, квадраты, пирамиды, морские звезды — чтобы найти те, которые позволяют клеткам быть более эффективным в «кинематической» репликации на основе движения, о которой сообщается в новом исследовании.
«Мы попросили суперкомпьютер в UVM выяснить, как отрегулировать форму первоначальных родителей, и после месяцев пыхтения ИИ придумал несколько странных проектов, в том числе тот, который напоминал Pac-Man», — говорит Кригман. «Это очень неинтуитивно. Это выглядит очень просто, но это не то, что придумал бы человек-инженер. Почему один крошечный рот? Почему не пять? Мы отправили результаты Дугу, и он построил этих родительских ксеноботов в форме Pac-Man. Затем эти родители построили детей, которые построили внуков, которые создали правнуков, которые создали праправнуков». Другими словами, правильный дизайн значительно продлил количество поколений.
Созданный искусственным интеллектом «родительский» организм (форма C; красный) рядом со стволовыми клетками, сжатыми в шар («потомство»; зеленый). Авторы и права: Дуглас Блэкистон и Сэм Кригман
Кинематическая репликация хорошо известна на уровне молекул, но ее никогда раньше не наблюдали на уровне целых клеток или организмов.
«Мы обнаружили, что внутри организмов или живых систем есть ранее неизвестное пространство, и это огромное пространство», — говорит Бонгард. «Как же нам тогда исследовать это пространство? Мы нашли ксеноботов, которые ходят. Мы нашли ксеноботов, которые плавают. И теперь, в этом исследовании, мы нашли ксеноботов, которые кинематически воспроизводятся. Что еще там?
Или, как пишут ученые в исследовании Proceedings of the National Academy of Science : «жизнь таит в себе удивительные явления прямо под поверхностью, ожидая, пока их обнаружат».
Реакция на риск
Некоторые люди могут найти это воодушевляющим. Другие могут с беспокойством или даже ужасом отреагировать на идею самовоспроизводящейся биотехнологии. Для команды ученых целью является более глубокое понимание.
«Мы работаем над тем, чтобы понять это свойство: репликация. Мир и технологии стремительно меняются. Для общества в целом важно, чтобы мы изучали и понимали, как это работает», — говорит Бонгард. Эти живые машины размером с миллиметр, полностью содержащиеся в лаборатории, легко гасимые и проверенные федеральными, государственными и институциональными экспертами по этике, «не то, что не дает мне спать по ночам. Опасность представляет следующая пандемия; ускорение ущерба экосистемам от загрязнения; усиление угроз от изменения климата», — говорит Бонгард из UVM. «Это идеальная система для изучения самовоспроизводящихся систем. У нас есть моральный долг понять условия, при которых мы можем контролировать его, направлять, сливать, преувеличивать».
Эти живые машины размером с миллиметр, полностью содержащиеся в лаборатории, легко гасимые и проверенные федеральными, государственными и институциональными экспертами по этике, «не то, что не дает мне спать по ночам. Опасность представляет следующая пандемия; ускорение ущерба экосистемам от загрязнения; усиление угроз от изменения климата», — говорит Бонгард из UVM. «Это идеальная система для изучения самовоспроизводящихся систем. У нас есть моральный долг понять условия, при которых мы можем контролировать его, направлять, сливать, преувеличивать».
Бонгард указывает на эпидемию COVID и поиск вакцины. «Скорость, с которой мы можем создавать решения, имеет большое значение. Если мы сможем разработать технологии, учась у ксеноботов, где мы сможем быстро сказать ИИ: «Нам нужен биологический инструмент, который делает X и Y и подавляет Z», — это может быть очень полезным. Сегодня это занимает чрезвычайно много времени». Команда стремится ускорить процесс перехода людей от выявления проблемы к поиску решений — «например, развертывание живых машин для извлечения микропластика из водоемов или создания новых лекарств», — говорит Бонгард.
«Нам необходимо создавать технологические решения, которые развиваются с той же скоростью, что и проблемы, с которыми мы сталкиваемся, — говорит Бонгард.
И команда видит в исследованиях многообещающие достижения в области регенеративной медицины. «Если бы мы знали, как заставить наборы клеток делать то, что мы от них хотим, в конечном счете, это была бы регенеративная медицина — это решение проблемы травм, врожденных дефектов, рака и старения», — говорит Левин. «Все эти различные проблемы возникают из-за того, что мы не знаем, как предсказать и контролировать, какие группы клеток будут строиться. Ксеноботы — это новая платформа для нашего обучения».
Ученые, создавшие ксеноботы, приняли участие в панельной дискуссии 1 декабря 2021 года, чтобы обсудить последние достижения в своих исследованиях. В этом документе можно найти ответы на многие вопросы аудитории, заданные во время вебинара, на которые у участников дискуссии не было времени ответить. Предоставлено: Институт Висса при Гарвардском университете. 90 000 роботов скоро смогут размножаться — изменит ли это наше представление об эволюции? | Эмма Харт
Предоставлено: Институт Висса при Гарвардском университете. 90 000 роботов скоро смогут размножаться — изменит ли это наше представление об эволюции? | Эмма ХартЕстественная эволюция наполнила нашу планету огромным и разнообразным множеством форм жизни, от дна океанов до неба над нами, около 8 миллионов видов приспособились к окружающей среде множеством способов. Тем не менее, спустя 100 лет после того, как Карел Чапек ввел термин робот , функциональные способности многих видов по-прежнему превосходят возможности современной человеческой инженерии, которой еще предстоит убедительно разработать методы производства роботов, демонстрирующих интеллект человеческого уровня, беспрепятственно передвигающихся и функционирующих в сложных условиях и способных к самостоятельным действиям. -воспроизведение.
Но смогут ли когда-нибудь размножаться роботы? Это, несомненно, составляет столп «жизни», разделяемой всеми природными организмами. Группа исследователей из Великобритании и Нидерландов недавно продемонстрировала полностью автоматизированную технологию, позволяющую физическим роботам многократно размножаться, со временем развивая свой искусственный генетический код, чтобы лучше адаптироваться к окружающей среде. Возможно, это равносильно искусственной эволюции. Дети-роботы создаются путем смешивания цифровой «ДНК» двух родительских роботов на компьютере.
Возможно, это равносильно искусственной эволюции. Дети-роботы создаются путем смешивания цифровой «ДНК» двух родительских роботов на компьютере.
Новый дизайн сначала отправляется на 3D-принтер, который изготавливает корпус робота, затем к роботизированной руке прикрепляется «мозг», загруженный управляющим программным обеспечением, унаследованным от родителей, вместе с любыми новыми компонентами, такими как датчики, колеса или суставы, отобранные этим «эволюционным» процессом. Цифровая копия каждого нового робота также создается в ходе компьютерного моделирования. Это обеспечивает новый тип эволюции: новые поколения могут быть получены путем объединения наиболее успешных черт виртуальной «матери» и физического «отца», сочетая преимущества быстрой, но потенциально нереалистичной моделируемой эволюции с более точной оценкой роботов в реальной физической среде. Таким образом, новые роботы наследуют черты, представляющие лучшее из обоих типов эволюции.
Хотя эта технология может работать без участия человека, она также позволяет сотрудничать с человеком-«селекционером»: точно так же, как люди селекционно выращивают сельскохозяйственные культуры на заре земледелия, робот-селекционер может влиять на отбор роботов с особым черты. Можно даже представить племенные фермы, производящие роботов, адаптированных к конкретным условиям и требованиям пользователей. Они могут быть выведены из-за таких качеств, как срок службы батареи или углеродный след, точно так же, как мы выводим растения из-за засухоустойчивости или вкуса.
Можно даже представить племенные фермы, производящие роботов, адаптированных к конкретным условиям и требованиям пользователей. Они могут быть выведены из-за таких качеств, как срок службы батареи или углеродный след, точно так же, как мы выводим растения из-за засухоустойчивости или вкуса.
Такие фермы должны подлежать такому же строгому контролю и этическим соображениям, как, скажем, выращивание генетически модифицированных культур, например, возможность закрытия всего предприятия одним нажатием кнопки или ограничение поставок сырья. Кроме того, также важно учитывать возможность того, что эволюция может привести к тому, что роботы будут демонстрировать злонамеренное или вредоносное поведение, и принять соответствующие превентивные меры.
Идея цифровой эволюции — имитация биологической эволюции в программном обеспечении для последовательного создания все лучших и лучших решений проблемы с течением времени — не нова. Его можно проследить до 1960-х годах, когда инженеры в Германии запрограммировали компьютер для разработки оптимальной конструкции сочлененной пластины, подверженной турбулентному воздушному потоку. С тех пор «эволюционные алгоритмы», работающие внутри компьютера, использовались для проектирования всего, от таблиц до лопаток турбины, просто сообщая эволюционному процессу, какой показатель он должен стремиться оптимизировать (например, мощность, генерируемая лопаткой турбины). В 2006 году НАСА отправило в космос спутник с антенной связи, созданной путем искусственной эволюции.
С тех пор «эволюционные алгоритмы», работающие внутри компьютера, использовались для проектирования всего, от таблиц до лопаток турбины, просто сообщая эволюционному процессу, какой показатель он должен стремиться оптимизировать (например, мощность, генерируемая лопаткой турбины). В 2006 году НАСА отправило в космос спутник с антенной связи, созданной путем искусственной эволюции.
Сейчас мы находимся в моменте прорыва. Хотя ученые всегда были уверены, что цифровая эволюция может быть эффективным инструментом оптимизации, ее творчество в создании оригинальных и необычных конструкций, которые не были бы придуманы человеком, было еще более удивительным. Творчество биологической эволюции ясно проявляется в мире природы. В кубинских тропических лесах на виноградных лозах развились листья в форме спутниковых тарелок, которые усиливают сигналы, распространяемые эхолокирующими летучими мышами, и направляют их на цветы, увеличивая опыление. В замерзающем Южном океане рыбы вырабатывают собственные «антифризные» белки, чтобы выжить.
Но также наблюдались многочисленные примеры творчества в цифровой эволюции. На просьбу найти поведение шестиногого робота, которое позволило бы ему ходить, даже если он был поврежден, цифровая эволюция обнаружила несколько способов ходьбы, использующих только подмножества ног, и даже обнаружила способ движения робота, если бы он был поврежден. ему оторвало ноги из-за того, что он шаркал на спине. В другом случае была разработана электронная схема на чипе, где элементы схемы были отключены, используя эффекты электромагнитной связи, характерные для дефектов кремния на самом чипе.
Цифровая эволюция теперь находит применение в областях, которые мы могли бы представить как исключительно человеческие, например, в создании музыки и искусства (даже получение награды на художественном конкурсе Университета Вайоминга, где судьи не знали, что победившая картина была создана с помощью алгоритма) . Хотя для непосвященных это может показаться искусственным интеллектом, цифровая эволюция — это особое подмножество этой более широкой области.
Идея использовать эволюцию для разработки роботов особенно привлекательна, особенно в тех случаях, когда люди мало знают об окружающей среде, в которой должен работать робот, например, подводная добыча полезных ископаемых, очистка старых отходов внутри ядерного реактора или использование нанороботов для доставки лекарств в организм человека. В отличие от естественной эволюции, которая движима просто целями «выживания и размножения», искусственная эволюция может руководствоваться конкретными целями. Как только этот эволюционный процесс будет запущен в цепочку, и с помощью технологии, описанной выше, компьютерной системы, инструктирующей 3D-принтер создавать улучшенные модели роботов для этих конкретных сред, у нас будет начало теоретической основы для самоподдерживающегося робота. популяция, способная воспроизводить себя и «эволюционировать» без особого участия человека.
Что не означает, что люди будут лишними. Цифровая эволюция, вероятно, будет совместным процессом между человеком и машиной, когда люди будут описывать то, что желательно, а эволюция дает как . Так, например, человек может потребовать «энергоэффективного робота, изготовленного из устойчивых материалов для перемещения тяжелых отходов внутри реактора», предоставив эволюции выяснить, как этого можно достичь. Достижения в производственных технологиях, которые облегчают автоматизированное и быстрое создание прототипов из различных материалов, включая гибкие мягкие пластмассы, сыграли важную роль в повышении нашей способности воспроизводить эволюцию в практических временных масштабах.
Так, например, человек может потребовать «энергоэффективного робота, изготовленного из устойчивых материалов для перемещения тяжелых отходов внутри реактора», предоставив эволюции выяснить, как этого можно достичь. Достижения в производственных технологиях, которые облегчают автоматизированное и быстрое создание прототипов из различных материалов, включая гибкие мягкие пластмассы, сыграли важную роль в повышении нашей способности воспроизводить эволюцию в практических временных масштабах.
Может показаться, что все это граничит с научной фантастикой, но есть серьезный момент. Роботы явно должны сыграть свою роль в нашем будущем, будь то революция в здравоохранении или выполнение задач, слишком опасных для человека. Мы стремительно расходуем запасы сырья на нашей планете, а текущие производственные процессы увеличивают выбросы углерода и создают серьезные проблемы с утилизацией отходов. Возможно, творческий подход эволюционных методов позволит спроектировать новые типы роботов, свободные от ограничений, которые наше понимание техники, физики и материаловедения накладывает на текущие процессы проектирования.