Содержание
Экзоскелеты: что это и где их применяют
Экзоскелеты не только дают человеку силу и выносливость, но и буквально помогают встать на ноги. РБК Тренды рассказывают, какие роли выполняют робокостюмы
Экзоскелет — это мобильный механизм, который работает при помощи системы электродвигателей, рычагов, гидравлики и других технологических решений. Экзоскелеты предназначены для восполнения утраченных функций человека, а также для увеличения силы мышц и расширения амплитуды движений.
Первый прототип экзоскелета создала компания General Electric совместно с армией США в 1960-е годы. Названный «Хардимэн», он весил 680 кг, имел восемь шарниров и два захвата, соединенных гидравлической и электронной сетями. Технологи рассчитали, что экзокостюм поможет человеку поднимать вес около 110 кг, но в реальных тестах разработка себя не оправдала. Когда систему приводили в действие, она выполняла хаотичные движения. Разработки прототипов продолжили.
Прототип экзоскелета профессора Али Сейрега из Университета машиностроения Мэдисона, 1970-е годы
Сегодня экзоскелеты применяются во многих областях — от медицинской реабилитации до промышленного производства. РБК Тренды рассказывают, какие бывают экзоскелеты и как они работают.
РБК Тренды рассказывают, какие бывают экзоскелеты и как они работают.
Для реабилитации
Российская компания ExoAtlet предлагает медицинские экзоскелеты для реабилитации пациентов с нарушениями опорно-двигательного аппарата и нервной системы в нижней части тела. Они управляются при помощи кнопок, расположенных на костылях, и приводятся в движение благодаря сигналам от датчиков и электромиограммы. Алгоритмы устройства и встроенные приводы повторяют естественную ходьбу человека. ExoAtlet весит около 20 кг, однако пациент не ощущает этот вес, поскольку движения автоматизированы и поддерживаются самой системой. Экзоскелет стоит около ₽4 млн.
Экзоскелет ExoAtlet
Другая российская компания Simbionix представила экзоскелет «Компаньон», предназначенный для восстановления двигательной активности людей с повреждениями спины и нижнего пояса конечностей. Механизм крепится к телу с помощью специальных инструментов, его можно регулировать по ширине и глубине таза, длине бедра и голени. Экзоскелет выдерживает вес до 120 кг и подходит для людей ростом до 2 м. Из-за герметичности его можно использовать при температуре воздуха от минус 30 до плюс 50 °C° и в любых погодных условиях.
Экзоскелет выдерживает вес до 120 кг и подходит для людей ростом до 2 м. Из-за герметичности его можно использовать при температуре воздуха от минус 30 до плюс 50 °C° и в любых погодных условиях.
«Компаньон» имеет съемный аккумулятор и внешний модуль управления. При активном использовании заряда хватит на три часа, а в пассивном режиме — до пяти часов. Экзоскелет весит 8,5 кг и выполнен из высокопрочного пластика и сплава титана. Он предполагает разные режимы — ходьба, вставание, подъем по ступенькам, приседание. Есть возможность управлять длиной и высотой шага с помощью дистанционного пульта.
Экзоскелет «Компаньон»
(Фото: symbionix.ru)
Компания утверждает, что устройство эффективно при реабилитации и поддержке людей с мышечной дистрофией, травмами спинного мозга, инсультами, нервно-мышечными и нейродегенеративными заболеваниями, черепно-мозговыми травмами.
Американская Trexo Robotics разработала экзоскелеты для детей с ограниченными возможностями. Функция индивидуальной регулировки делает Trexo универсальным инструментом, помогающим самостоятельно передвигаться детям с церебральным параличом, травмами мозга, повреждениями спинного мозга, параплегией, мышечной дистрофией, синдромом Ретта и другими заболеваниями. Месяц аренды устройства стоит $1 000.
Экзоскелет Trexo Robotics
Trexo Home управляется с планшета. Экзоскелет позволяет регулировать нагрузку на тело, характер походки, скорость движения и имеет функцию активной помощи мышцам. Его поставляют с обучающими инструкциями.
Нижняя часть Trexo имеет две раздвижные части от бедра до колена и от колена до щиколотки. Ширину бедер тоже можно регулировать, как и высоту опорной рамы.
Для больших нагрузок
Японская компания Aton презентовала несколько прототипов экзоскелета KOMA 1.5, силового костюма, который помогает без усилий подниматься и опускаться, нести тяжелые предметы манипуляторами-руками, поддерживать движение. Благодаря встроенным камерам с искусственным интеллектом экзоскелет обнаруживает и избегает препятствия.
Благодаря встроенным камерам с искусственным интеллектом экзоскелет обнаруживает и избегает препятствия.
Прототип экзоскелета KOMA 1.5
(Фото: atoun.co.jp)
KOMA 1.5 имеет два режима. Первый, «Buggy Mode», позволяет перемещать грузы по гладкой и ровной поверхности, например, внутри склада. Второй, «Two-Legged Mode», предназначен для подъемов с грузом и преодоления препятствий. В этом режиме колеса экзоскелета убираются назад, образуя две ноги с приводом, повторяющие движения ног человека.
В России в 2021 году компания «Ростех — Доверенные платформы робототехнические комплексы» начала выпускать модульные экзоскелеты ProEXO, которые защищают рабочих при тяжелых физических нагрузках. Базовая стоимость комплекса составляет ₽30 тыс.
Экзоскелет ProEXO
Такой экзоскелет может быть пассивным — для защиты опорно-двигательного аппарата сотрудника от перегрузок, или активным — со встроенными приводящими моторами, которые берут на себя большую часть физических нагрузок. Он помогает выполнить более 11 производственных операций, в том числе погрузочно-разгрузочные работы. В компании заявили, что «с экзоскелетом 30 кг груза будут ощущаться, как 15 кг».
Он помогает выполнить более 11 производственных операций, в том числе погрузочно-разгрузочные работы. В компании заявили, что «с экзоскелетом 30 кг груза будут ощущаться, как 15 кг».
Для промышленности и ЧС
Российская Exorise предлагает три модели экзоскелетов — X-Soft, X-Rise и X-Arm.
- X-Soft — это мягкий экзоскелет, предназначенный для разгрузки спины при наклонах и поворотах с грузом или без него. Он весит всего 1,5-2 кг.
- X-Arm относится к линейке «тяжелых экзоскелетов» и весит около 10 кг. Благодаря прочным опорам он позволяет нивелировать вес используемых инструментов массой до 40 кг.
- Модель X-Rise весит около 3 кг, она поддерживает руки во время выполнения манипуляций, которые требуют их длительного удержания на весу.
Женская модель X-Soft
(Фото: exorise.com)
Экзоскелеты Exorise — пассивного типа, так как они работают за счет накопления и отдачи энергии без электрики. С помощью силы гравитации рабочий сам «заряжает» свое устройство. Разработчики заявляют, что экзоскелет можно адаптировать под разные задачи, он износостойкий и жаростойкий. Его предлагают применять в промышленности, при строительстве, на складах, при работе в МЧС.
С помощью силы гравитации рабочий сам «заряжает» свое устройство. Разработчики заявляют, что экзоскелет можно адаптировать под разные задачи, он износостойкий и жаростойкий. Его предлагают применять в промышленности, при строительстве, на складах, при работе в МЧС.
Для строительства
Экзоскелеты Sarcos Robotics серии Guardian обеспечивают перенос веса из одной части тела на другую при выполнении определенного типа работ. Также они смещают нагрузку с рук на ноги, когда рабочему нужно долго держать руки на весу. Это помогает снизить мышечное напряжение и повысить выносливость работников стройплощадок.
Экзоскелет Sarcos Robotics
Экзоскелет имеет 24 степени свободы и предупреждающие о препятствиях датчики.
Он оснащен удобным интерфейсом управления, который отображает различные уведомления. Режим «Свободные руки» позволяет оператору заблокировать руки костюма с грузом на весу, чтобы одновременно выполнять сложные задачи своими собственными.
Многие компании выпускают экзоскелеты, обеспечивающие поддержку рук, так как они лучше всего подходят для выполнения задач, связанных с резкой, сверлением и шлифованием поверхностей. Конструкции поддерживают руки и плечи таким образом, что нагрузка от постоянного удерживания тяжелых инструментов уменьшается.
Конструкции поддерживают руки и плечи таким образом, что нагрузка от постоянного удерживания тяжелых инструментов уменьшается.
Так, EksoVest Bionics задействовала механизм на пружинах в обеих руках экзоскелета, чтобы человеку было проще удерживать на весу тяжелые предметы. А экзоскелет от компании Levitate Technologies использует систему колесиков с приводами для решения аналогичной задачи.
Экзоскелет EksoVest Bionics
Для армии
Компания Lockheed Martin разработала для армии США системы ONYX для нижней части тела, которые повышают мобильность и снижают утомляемость. Конструкция уменьшает усилия, прилагаемые при ходьбе и лазании, а также дает солдату возможность переносить на себе больше оборудования, необходимого для выполнения боевых задач. Кроме того, она распределяет ортопедическую нагрузку так, чтобы не травмировался позвоночник.
Экзоскелет Lockheed Martin
В России в 2020 также испытали экзоскелет для военных производства корпорации «Ростех». При весе 6 кг устройство позволяет переносить боевую экипировку и вооружение массой до 60 кг. Экзоскелеты уже поставляются в инженерные войска и используются в госпиталях для реабилитации пациентов.
При весе 6 кг устройство позволяет переносить боевую экипировку и вооружение массой до 60 кг. Экзоскелеты уже поставляются в инженерные войска и используются в госпиталях для реабилитации пациентов.
Экзоскелет «Ростеха»
(Фото: rostec.ru)
На форуме «Армия-2021» «Ростех» показал первый опытный образец боевого экзоскелета с электродвигателями. Он работает в активном и пассивном режимах. Первый включается, когда солдат перемещается по пересеченной местности или горам. Электродвигатели с датчиками давления в стопах адаптируются под особенности движений человека. В пассивном режиме экзоскелет помогает при передвижении по горизонтальной поверхности с грузом.
Для ходьбы и бега
Группа инженеров под руководством Конора Уолша из Гарвардского университета в 2019 году представила носимый экзоскелет, способный снижать энергозатраты во время ходьбы и бега. Он подтягивает ноги в определенные моменты движения. Во время ходьбы экзоскелет снижает энергозатраты на 9,3%.
Он подтягивает ноги в определенные моменты движения. Во время ходьбы экзоскелет снижает энергозатраты на 9,3%.
Экзоскелет для ходьбы и бега
Экзоскелет состоит из нескольких связанных между собой частей. Они крепятся на бедрах, талии и плечах. На задней части устройства расположен блок с электромоторами, связанными с двумя тросами. На других концах эти тросы закреплены на бедрах. Когда нога движется назад, трос натягивается с помощью электромотора и облегчает работу мышц.
В 2020 году ученые из Стэнфорда разработали свой прототип экзоскелета, который дает возможность снизить нагрузку на ноги при беге и при ходьбе. Он позволяет снизить затраты энергии на бег уже на 15%.
Экзоскелет крепится к голени при помощи ремней, также он закрепляется на обуви при помощи веревки, которая пропускается петлей под стопой. У экзоскелета есть небольшая поддерживающая углепластиковая платформа, которая размещается под стопой. Он управляется с использованием системы тросов, натягиваемых или ослабляемых внешними электромоторами.
Прототип экзоскелета стэнфордских инженеров
Подобные экзоскелеты позволят облегчить работу курьеров и почтальонов, а также работников других сфер, которым требуется много ходить.
Перспективы экзоскелетов
Бристольский университет работает над мягкой роботизированной одеждой, которая могла бы помочь людям избежать падений, поддерживая их во время ходьбы и давая бионическую силу. Благодаря элементам из графена она будет включать в себя также технологии электрической стимуляции и мониторинга всего тела: суперконденсатор, устройство для электрокардиограммы, мониторинга активности, отслеживания движения глаз, датчик температуры и гибкие нагревательные элементы. Исследователи полагают, что эта технология может в конечном итоге привести к отказу от инвалидных кресел.
«Многие существующие устройства, используемые людьми с ограниченными возможностями передвижения, могут вызывать или усугублять такие состояния, как плохое кровообращение, повреждение кожи или склонность к падению, — говорит доктор Джонатан Росситер, профессор робототехники в Бристольском университете. — Носимая мягкая робототехника может решить многие из этих проблем и в то же время снизить расходы на здравоохранение».
— Носимая мягкая робототехника может решить многие из этих проблем и в то же время снизить расходы на здравоохранение».
ЭкзоАтлет — «железный костюм», который помогает людям встать на ноги – ExoAtlet
med.vesti.ru
«Говорить о том, что эта технология будет точно помогать людям, могли только мы как безумцы, верящие в собственную разработку»
История этого проекта началась в 2011 году с экзоскелета для спасателей. В 2013 году возникла идея поставить на ноги тех, кто сам этого сделать не может. Сегодня за плечами компании ЭкзоАтлет около сотни экзоскелетов с одноименным названием и шесть их различных прототипов.
А на счету этих «железных костюмов», начиненных электроникой, уже есть настоящие награды – люди, которые идут на поправку. Кстати, других достижений у компании тоже немало. Например, резидентство в «Сколково» и выход на азиатский рынок.
Мы как безумцы верили в свою разработку
Использование экзоскелета как медицинского оборудования, которое позволяет научить парализованного человека ходить, не нова, и не нами придумана, говорит директор по развитию бизнеса компании ЭкзоАтлет Екатерина Березий.
Экзоскелет ExoAtlet (разработчиком которого является компания ЭкзоАтлет) – это каркасный скелет, который крепится на спине, бедрах и ногах человека. На спине находится небольшой рюкзак с электроникой – своеобразный пункт управления. Сзади у прибора расположены «рожки», с помощью которых инструктор страхует пациента во время тренировок.
Конструкция нелегкая – около 20 кг. Но пациент не ощущает тяжести, так как экзоскелет несет и себя, и пациента. Скорость и шаг задает медик, у каждого пациента свои параметры. Пользоваться экзоскелетом могут люди ростом от 150 до 190 см, весом до 100 кг.
В 2013 году, когда мы задумали создавать экзоскелет, технологии были уже достаточно развиты. Например, уже появились алгоритмы, которые позволяющие совершать точные движения ногами. К тому же у нас был опыт разработки аварийно-спасательных экзосекелетов. А главное – сама идея казалась нам крайней человечной и нужной. Экзоскелет давал возможность ходить тем, кто этого не мог сделать сам.
«Тогда нам казалось, что это важная социальная функция – с помощью экзоскелета можно помочь человеку социализироваться. Но доказательств, что эта технология может восстанавливать двигательную функцию, было немного. И говорить о том, что эта технология будет точно помогать людям, могли только мы как безумцы, верящие в собственную разработку», – вспоминает она.
Первой ласточкой стало исследования американского профессора из Университета Дьюка (Duke University) — Мигеля Николелиса (Miguel Nicolelis), опубликованное в журнале Nature в 2015 году. Он провел двухлетнее исследование с восемью пациентами, у которых было полное прерывание спинного мозга в результате травмы, и они оказались полностью обездвижены. Он доказал, что у 100% пациентов за два года тренировок в экзоскелете, полный паралич сменился на частичный. Это статья взорвала сознание медицинского сообщества, а для нас стала подтверждением того, во что мы верили.
Сейчас у нас уже есть доказательства – наши пациенты, которые благодаря экзоскелету делают свои успехи. Например, крутят велосипед, лежа на кровати, или передвигаются с опорой на ходунки. До использования экзоскелета это казалось невозможным.
Например, крутят велосипед, лежа на кровати, или передвигаются с опорой на ходунки. До использования экзоскелета это казалось невозможным.
Один из них – Ренат Исхаков, на его счету уже три реабилитации на экзоскелете. Шесть лет назад мужчина получил травму спинного мозга в результате ДТП. Ренату пришлось перенести не одну операцию и реабилитацию – летать приходилось из родного Новосибирска в Москву.
Пилотировать (ред. — управлять) первое время было нелегко, признается мужчина. «Было очень трудно: от момента вставания и удерживания себя в положении равновесия до первого шага. Но через труд начали работать именно те мышцы, до которых я совершенно не мог самостоятельно добраться. Когда реабилитация закончилась, и я поехал домой, я уже почувствовал улучшения», – вспоминает Ренат Исхаков.
Сейчас мужчина покоряет лестницы, а главное – процесс восстановления запущен, и этот рюкзак за спиной, начиненный электроникой, кажется, дает пациенту настоящие крылья. Кроме этого, сегодня Ренат может проходить реабилитацию на экзоскелете в своем городе.
«Эмоции через край! Действительно идет процесс восстановления! У меня появилась чувствительность в ногах! Я теперь самостоятельно могу их сгибать и поднимать! И это только начало», – говорит пилот.
Реабилитация с роботом по ОМС
Сегодня пройти 14-дневный курс реабилитации с применением ExoAtlet можно бесплатно (по ОМС), или на платной основе. ExoAtlet уже есть в 25 клиниках по всей России. У жителей Подмосковья, например, есть возможность пройти полный курс реабилитации (20 дней) в центре соцзащиты «Меридиан» в Серпухове. Для этого нужно получить специальное направление от территориального органа соцзащиты.
Экзоскелет можно использовать для реабилитации людям с рассеянным склерозом, после инсульта и различных травм позвоночника. Есть и другие диагнозы, когда экзоскелет может помочь. Например, черепно-мозговая травма, которая привела к нарушению двигательных функций, это также могут быть различные формы ДЦП, миопатия.
Ходьба точно улучшит общее физиологическое состояние, позволит восстановить работу сердечно-сосудистой системы, увеличит объем легких, а корсетные мышцы спины станут лучше работать, говорят разработчики.
А если спинной мозг поврежден не полностью, а травма свежая, то есть шанс вообще избежать инвалидности. Но затягивать с реабилитацией не нужно. Для тех, кто совсем не может ходить, ExoAtlet – это и частичная замена инвалидной коляске.
Особых противопоказаний для использования экзоскелета нет, отмечает Екатерина Березий. Главное, чтобы человек мог самостоятельно находиться в вертикальном положении. Плечевой пояс должен быть в рабочем состоянии, чтобы человек мог опираться на костыли, либо на брусья. Инструктор должен только подстраховывать, но не держать.
Еще важно отсутствие контрактур и остеопороза. Если у человека появились контрактуры в ногах, распределение веса будет неправильным, и могут быть осложнения с суставами. Также необходимо проверить состояние сосудов, нет ли тромбоза. Это четыре таких ключевых момента, которые являются ограничениями по тренировкам.
«Говорить о том, что эта технология будет точно помогать людям, могли только мы как безумцы, верящие в собственную разработку»
История этого проекта началась в 2011 году с экзоскелета для спасателей. В 2013 году возникла идея поставить на ноги тех, кто сам этого сделать не может. Сегодня за плечами компании ЭкзоАтлет около сотни экзоскелетов с одноименным названием и шесть их различных прототипов.
А на счету этих «железных костюмов», начиненных электроникой, уже есть настоящие награды – люди, которые идут на поправку. Кстати, других достижений у компании тоже немало. Например, резидентство в «Сколково» и выход на азиатский рынок.
Мы как безумцы верили в свою разработку
Использование экзоскелета как медицинского оборудования, которое позволяет научить парализованного человека ходить, не нова, и не нами придумана, говорит директор по развитию бизнеса компании ЭкзоАтлет Екатерина Березий.
Экзоскелет ExoAtlet (разработчиком которого является компания ЭкзоАтлет) – это каркасный скелет, который крепится на спине, бедрах и ногах человека. На спине находится небольшой рюкзак с электроникой – своеобразный пункт управления. Сзади у прибора расположены «рожки», с помощью которых инструктор страхует пациента во время тренировок.
Конструкция нелегкая – около 20 кг. Но пациент не ощущает тяжести, так как экзоскелет несет и себя, и пациента. Скорость и шаг задает медик, у каждого пациента свои параметры. Пользоваться экзоскелетом могут люди ростом от 150 до 190 см, весом до 100 кг.
В 2013 году, когда мы задумали создавать экзоскелет, технологии были уже достаточно развиты. Например, уже появились алгоритмы, которые позволяющие совершать точные движения ногами. К тому же у нас был опыт разработки аварийно-спасательных экзосекелетов. А главное – сама идея казалась нам крайней человечной и нужной. Экзоскелет давал возможность ходить тем, кто этого не мог сделать сам.
«Тогда нам казалось, что это важная социальная функция – с помощью экзоскелета можно помочь человеку социализироваться. Но доказательств, что эта технология может восстанавливать двигательную функцию, было немного. И говорить о том, что эта технология будет точно помогать людям, могли только мы как безумцы, верящие в собственную разработку», – вспоминает она.
Первой ласточкой стало исследования американского профессора из Университета Дьюка (Duke University) — Мигеля Николелиса (Miguel Nicolelis), опубликованное в журнале Nature в 2015 году. Он провел двухлетнее исследование с восемью пациентами, у которых было полное прерывание спинного мозга в результате травмы, и они оказались полностью обездвижены. Он доказал, что у 100% пациентов за два года тренировок в экзоскелете, полный паралич сменился на частичный. Это статья взорвала сознание медицинского сообщества, а для нас стала подтверждением того, во что мы верили.
Сейчас у нас уже есть доказательства – наши пациенты, которые благодаря экзоскелету делают свои успехи. Например, крутят велосипед, лежа на кровати, или передвигаются с опорой на ходунки. До использования экзоскелета это казалось невозможным.
Один из них – Ренат Исхаков, на его счету уже три реабилитации на экзоскелете. Шесть лет назад мужчина получил травму спинного мозга в результате ДТП. Ренату пришлось перенести не одну операцию и реабилитацию – летать приходилось из родного Новосибирска в Москву.
Пилотировать (ред. — управлять) первое время было нелегко, признается мужчина. «Было очень трудно: от момента вставания и удерживания себя в положении равновесия до первого шага. Но через труд начали работать именно те мышцы, до которых я совершенно не мог самостоятельно добраться. Когда реабилитация закончилась, и я поехал домой, я уже почувствовал улучшения», – вспоминает Ренат Исхаков.
Сейчас мужчина покоряет лестницы, а главное – процесс восстановления запущен, и этот рюкзак за спиной, начиненный электроникой, кажется, дает пациенту настоящие крылья. Кроме этого, сегодня Ренат может проходить реабилитацию на экзоскелете в своем городе.
«Эмоции через край! Действительно идет процесс восстановления! У меня появилась чувствительность в ногах! Я теперь самостоятельно могу их сгибать и поднимать! И это только начало», – говорит пилот.
Реабилитация с роботом по ОМС
Сегодня пройти 14-дневный курс реабилитации с применением ExoAtlet можно бесплатно (по ОМС), или на платной основе. ExoAtlet уже есть в 25 клиниках по всей России. У жителей Подмосковья, например, есть возможность пройти полный курс реабилитации (20 дней) в центре соцзащиты «Меридиан» в Серпухове. Для этого нужно получить специальное направление от территориального органа соцзащиты.
ExoAtlet уже есть в 25 клиниках по всей России. У жителей Подмосковья, например, есть возможность пройти полный курс реабилитации (20 дней) в центре соцзащиты «Меридиан» в Серпухове. Для этого нужно получить специальное направление от территориального органа соцзащиты.
Экзоскелет можно использовать для реабилитации людям с рассеянным склерозом, после инсульта и различных травм позвоночника. Есть и другие диагнозы, когда экзоскелет может помочь. Например, черепно-мозговая травма, которая привела к нарушению двигательных функций, это также могут быть различные формы ДЦП, миопатия.
Ходьба точно улучшит общее физиологическое состояние, позволит восстановить работу сердечно-сосудистой системы, увеличит объем легких, а корсетные мышцы спины станут лучше работать, говорят разработчики.
А если спинной мозг поврежден не полностью, а травма свежая, то есть шанс вообще избежать инвалидности. Но затягивать с реабилитацией не нужно. Для тех, кто совсем не может ходить, ExoAtlet – это и частичная замена инвалидной коляске.
Особых противопоказаний для использования экзоскелета нет, отмечает Екатерина Березий. Главное, чтобы человек мог самостоятельно находиться в вертикальном положении. Плечевой пояс должен быть в рабочем состоянии, чтобы человек мог опираться на костыли, либо на брусья. Инструктор должен только подстраховывать, но не держать.
Еще важно отсутствие контрактур и остеопороза. Если у человека появились контрактуры в ногах, распределение веса будет неправильным, и могут быть осложнения с суставами. Также необходимо проверить состояние сосудов, нет ли тромбоза. Это четыре таких ключевых момента, которые являются ограничениями по тренировкам.
Вдохновить и поставить на ноги
Сейчас мы пытаемся создать этапную реабилитацию на экзоскелете. Пилотные проекты уже есть в регионах. Это значит, что реабилитация пациента должна начинаться сразу после реанимации, в стационаре, рассказывает директор по развитию бизнеса компании ЭкзоАтлет.
«Правильно начинать использовать экзоскелет в реабилитации сразу, когда человек учится пересаживаться в инвалидную коляску. А дальше сформировать ему план тренировок, с которым он мог бы отправиться на третий этап, на амбулаторное лечение. Например, чтобы он тренировался на базе поликлиники и ходил на занятия как на фитнес», – говорит она.
А дальше сформировать ему план тренировок, с которым он мог бы отправиться на третий этап, на амбулаторное лечение. Например, чтобы он тренировался на базе поликлиники и ходил на занятия как на фитнес», – говорит она.
При такой программе вероятность, что существенные изменения произойдут уже в течение года-двух, выше. Во-первых, это будет ранняя реабилитация, во-вторых, непрерывная. И что немало важно – это мотивирует человека, дает ему вдохновение.
Одна из важных проблем человека, попавшего в такую ситуацию – это демотивация и потеря надежды.
«Человек оказывается дома наедине со своей амбулаторной картой и осознанием того, что верить можно только в себя. А оснований для этой веры немного. Особенно, если у семьи трудное финансовое положение. Человек нередко остается в полном отчаянии», – говорит Екатерина Березий.
На наш взгляд, введение такой программы может существенно улучшить эффект от самой реабилитации. И что не менее важно — это совершенно другой подход к пациенту, а значит и совсем другой результат.
На базе крупных областных клиник можно создать центр компетенции, где пациента обучат, сформируют программу тренировок. А дальше – на уровне территориальных центров – он сможет тренироваться.
«Пациент уже умеет ходить, у него уже все параметры введены в его карточку. Компания ЭкзоАтлет разработала облачный сервис, где хранятся все данные пациента и информация о прошедших тренировках. Инструктор просто обеспечивает доступ к экзоскелету. А лечащий врач может дистанционно наблюдать за тренировками, проводить диагностику, и если нужно корректировать план тренировок.
По сути, получается децентрализованная система, которая экономически эффективна. Содержать инструктора с экзоскелетом не так дорого, при том, что на одном экзоскелете в день могут тренироваться 8-10 пациентов».
Научить детей ходить
Сегодня компания является единственным в России разработчиком экзоскелетов. Благодаря достаточно низкой себестоимости компания может продавать оборудование по доступным ценам, и в два раза дешевле зарубежных аналогов. Сейчас таких железных костюмов собрано около сотни. Однако, потребность в них достаточно высокая.
Сейчас таких железных костюмов собрано около сотни. Однако, потребность в них достаточно высокая.
В год в России случается около полумиллиона инсультов, в 100 тысячах случаях из которых возможно использование экзоскелета, отмечает Екатерина Березий. Плюс есть травмы, которые приводят к нарушению двигательных функций, их порядка 8,5 тысяч ежегодно. Это достаточно большое количество пациентов. Кроме этого, нужно заниматься теми, кто уже использует инвалидные коляски, и тоже их восстанавливать, говорит она.
При этом обеспечивать каждого нуждающегося такими экзоскелетами необязательно. Нужна специальная инфраструктура, и где-то она уже есть, говорит директор по развитию бизнеса компании ЭкзоАтлет.
Сейчас компания занимается детской версией экзоатлета. Работа только началась, первый прототип будет готов к концу года, а через три года экзоскелетом смогут пользоваться первые дети, говорят в компании.
«У детей все очень хитро. Есть дети, которые могли ходить, но повредили себе спинной мозг, например, в ДТП. В этом случае экзоскелет выступает реабилитационным оборудованием», – говорит Екатерина Березий.
В этом случае экзоскелет выступает реабилитационным оборудованием», – говорит Екатерина Березий.
Есть дети, которые никогда не могли ходить, например, дети с диагнозом ДЦП. Здесь задача экзоскелета – научить детей вообще правильно двигаться. А это – «абилитация».
«Мы хотим научить ребенка ходить, дать ему возможность стать более самостоятельными во взрослом возрасте. А значит снизить уровень родительской опеки», – заключает она.
Новый мягкий экзоскелет для ног снизит расход энергии на рекордные 23% // Смотрим
Профиль
Экзоскелеты и передвижение людей с ограниченными возможностями
20 января 2017, 17:10
- Юлия Воробьёва
Фото Harvard Biodesign Lab.

Фото Harvard Biodesign Lab.
Фото Harvard Biodesign Lab.
Фото Harvard Biodesign Lab.
Инженеры представили гибкий экзоскелет для ног, который впервые позволяет снизить нагрузку пользователя при ходьбе почти на четверть. Устройство поможет в реабилитации после травм, инсультов и операций, а также позволит туристам и солдатам преодолевать длинные дистанции с тяжёлым грузом на спине.
Устройство поможет в реабилитации после травм, инсультов и операций, а также позволит туристам и солдатам преодолевать длинные дистанции с тяжёлым грузом на спине.
В 2016 году команда учёных из Гарвардского института Висса представила результаты разработки носимых роботизированных приспособлений, которые способны снизить расход энергии у здоровых людей, путешествующих с грузом на спине (туристов или спортсменов). Устройство было изготовлено из текстиля, оснащенного кабелями и системой управления, которая синхронизируется при ходьбе носителя с его механическими движениями и «берёт на себя» часть усилий. В итоге человеку становится гораздо проще преодолевать большие расстояния.
Подобный экзоскелет американские учёные разработали и для медицинских целей – в помощь людям, восстанавливающимся после инсульта или страдающим рассеянным склерозом.
Позднее учёные продолжили дорабатывать своё устройство и в результате создали новый ножной экзоскелет, который пригодится не только здоровым людям, но и тем, кто восстанавливается после травм и операций, а также страдает от паралича и различных проблем с суставами ног.
По словам инженеров и биологов, представленное устройство снижает расход энергии пользователя на 23% — сегодня это самая большая цифра для подобных приспособлений. Так, ранее мы рассказывали о похожем аппарате, который уменьшает нагрузку при ходьбе на 7%.
Новый гибкий экзоскелет для ног сохранил тканевую основу: она представляет собой два куска из специального эластичного материала, которые обматываются вокруг голеней и крепятся к поясу четырьмя ремнями, идущими через всё бедро. Приводящие кабели помогают движению ноги в районе лодыжки сзади, а также по дополнительным ремням энергия, произведённая в области лодыжки, передаётся к бедру спереди и облегчает движение ноги в бедренном суставе. Таким образом человек расходует меньше своей энергии, чтобы сделать шаг и для каждого сустава не требуется отдельный двигатель.
«Когда вы только начнёте носить этот костюм, привыкнуть к нему сразу не получится. Ноги будут «чувствовать себя» как будто вялыми, а мускулы будут совершать меньше работы, чем привыкли», — поясняет один из авторов разработки Конор Уолш (Conor Walsh) из Лаборатории биодизайна Гарварда.
Экзоскелет для ног по-прежнему требует существенных доработок. Пока что он соединён кабелями с довольно громоздким внешним двигателем, а кроме того, испытания устройства с тестовой группой из семи человек проходили на беговой дорожке, а не в естественных условиях.
В будущем учёные также планируют протестировать костюм, покрывающий всё тело, чтобы понять, можно ли его будет носить под обычной одеждой с учётом веса всех двигателей и питающих их батарей.
«Результаты этого исследования помогут нам найти золотую середину между дополнительным весом системы и количеством приложенной силы для достижения максимальных выгод расхода энергии пользователя. Определение этих взаимозависимостей у здоровых людей поможет нам разработать варианты для людей с нарушениями походки», — добавляет соавтор работы Санцзюнь Ли (Sangjun Lee).
Ожидается, что разработка найдёт применение не только в медицине (для восстановления двигательной активности), но также будет полезна для пожилых людей, туристов и солдат, которые преодолевают большие дистанции с грузом на спине.
Подробно новый гибкий экзоскелет для ног описывается в научной статье, опубликованной в издании Science Robotics.
Напомним, что ранее инженеры представили экзоскелет для малышей со спинальной мышечной атрофией.
новости
Весь эфир
Для чего нужны экзоскелеты?
В последнее время экзоскелеты из области научной фантастики перешли в разряд вещей, которые могут успешно применяться в реальной жизни.
Автоматические конструкции, предназначенные для восстановления утраченных или усиления имеющихся физических возможностей человека, состоят из прочного каркаса и приводов.
 Такие системы дублируют работу опорно-двигательного аппарата, рассчитывают усилия и безопасность движений.
Такие системы дублируют работу опорно-двигательного аппарата, рассчитывают усилия и безопасность движений.
Современные экзоскелеты делятся на два типа: пассивные и активные (силовые). Первые не имеют источников питания и работают благодаря усилиям оператора. Они не забирают на себя физическую нагрузку, а распределяют ее по телу пользователя. Активные конструкции функционируют за счет дополнительных двигателей. Эти модели имеют упор на земле, за счет чего позволяют человеку поднимать больше тяжестей.
Наиболее перспективные проекты экзоскелетов появились в 80-х годах 20 века. В 90-е началось их производство в разных странах. Первые роботизированные костюмы были громоздкими, тяжелыми и неуклюжими, поэтому не находили широкого применения на практике. Однако уже к концу 1990-х-началу 2000-х годов появились действительно полезные разработки в области расширения человеческих возможностей.
В настоящее время большая часть экзоскелетов производится для медицины, армии и промышленности.
Один из самых известных медицинских экзоскелетов для поддержки и усиления ног человека – HAL (Hybrid Assistive Limb). Первый вариант этой конструкции был создан в 1997 году.
Экзоскелет HAL крепится к нижней части спины и ногам пациента. Он работает в несколько этапов: сначала человек задумывается о движении, которое хочет совершить, и его мозг посылает к мышцам необходимые нервные импульсы. Парализованный человек не может корректно их воспринимать, поэтому на помощь приходит HAL. Система считывает слабые биоэлектрические потенциалы с поверхности кожи пациента и интерпретирует движение, о котором он думает.
Некоторые модели HAL применяются не только в медицинских целях, но и в строительстве, промышленности, при проведении спасательных операций.
Тренировочный экзоскелет Ekso Bionic был разработан в 2005 году специально для парализованных людей. С его помощью пациенты, имеющие проблемы с опорно-двигательным аппаратом после перенесенного инсульта, повреждения спинного или головного мозга, заново осваивают алгоритмы ходьбы и переноса веса.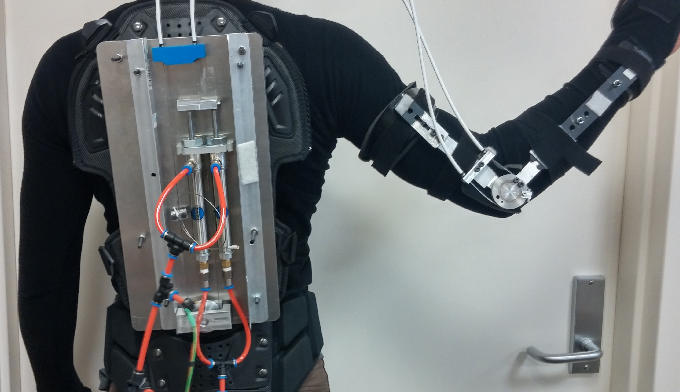 Экзоскелет помогает совершать движения в разных режимах обучения (с разной скоростью), записывает каждую операцию для последующего анализа. Костюм крепится к обычной одежде, поэтому его использование не вызывает сложностей и занимает мало времени.
Экзоскелет помогает совершать движения в разных режимах обучения (с разной скоростью), записывает каждую операцию для последующего анализа. Костюм крепится к обычной одежде, поэтому его использование не вызывает сложностей и занимает мало времени.
Экзоскелет HULC от компании Lockheed Martin применяется в военной сфере. Он увеличивает силу, скорость и выносливость солдат до непревзойденного уровня.
Гидравлическая конструкция из титанового сплава позволяет нести до 90 кг груза по пересеченной местности в течение нескольких часов без перерыва. Компьютерное управление и встроенный источник питания обеспечивают максимальную мобильность устройства. Экзоскелет переносит вес груза на землю, обеспечивая солдата силами для продолжительного и быстрого перемещения в области возможных военных действий.
Благодаря усовершенствованной композитной конструкции HULC защищает нагруженный опорно-двигательный аппарат человека от повреждений, может повысить эффективность обмена веществ, уменьшить потребление кислорода и снизить вероятность утомления.
Промышленный «антиробот» PROSTHESIS – громоздкая машина, управляемая исключительно движениями человека. Конструкцию весом около 3,5 тонн и высотой 4,2 м пилот перемещает собственными усилиями.
Интерфейсы, крепящиеся к рукам и ногам пилота, передают его движения гидравлическим «конечностям» робота. Спустя время человек, управляющий экзоскелетом, начинает ощущать его как естественную часть тела, и при увеличении нагрузки на конечности робота ему становится труднее двигаться.
Антиробот «Простесис» наглядно демонстрирует возможности экзоскелетов. В ближайшем будущем уже несложно представить себе механизированных строителей, с легкостью перемещающих огромные грузы.
Большой, управляемый человеком робот Enryu предназначен для использования в чрезвычайных ситуациях. Конструкция высотой 3,45 и шириной 2,4 м оборудована семью 6,8-мегапиксельными видеокамерами, способна поднимать объекты весом до одной тонны с помощью гидравлических манипуляторов. Enryu – один из самых эффективных роботов для проведения спасательных операций.
Enryu – один из самых эффективных роботов для проведения спасательных операций.
Российская разработка для реабилитации пациентов с проблемами ног и спинного мозга – ЭкзоАтлет. Один из пилотов ЭкзоАтлета – параолимпийский чемпион по керлингу на колясках Виталий Данилов.
Промышленный экзокостюм Стаханов от пермских разработчиков призван увеличивать производительность труда в машиностроительной и строительной отраслях, а также при проведении аварийно-спасательных работ в 2-5 раза.
Пассивный экзоскелет от компании «ЭкзоАтлант» находится на стадии разработки. Предполагается, что он снимет до 40 % нагрузки со спины человека во время переноса тяжестей.
Основная преграда для начала производства и полноценного внедрения экзоскелетов – отсутствие таких источников энергии, которые позволили бы устройствам работать автономно в течение длительного времени.
Построено множество рабочих прототипов экзоскелетов, некоторые модели (например, XOS от компании Sarcos) спроектированы очень удачно, однако из-за отсутствия аккумуляторов достаточной емкости их широкое применение невозможно.
Не менее значимыми факторами, ограничивающими использование экзоскелетов, является сложность их обслуживания.
Роботизированные конструкции должны быть эргономичными, надежными и безопасными.
Надежность функционирования экзоскелетов зависит от качества сборки, применяемых материалов и технологий. При конструировании большое внимание уделяется наиболее нагруженным узлам, в частности, регулирующим элементам.
Прямоугольные металлические пластины перемещаются в специальных пазах корпуса экзоскелета. Через сквозные отверстия они стягиваются в нужном положении шпильками.
Микроперемещения, которые неизбежно возникают между поверхностями пластин и корпуса, приводят к усиленному трению и износу деталей, возникновению скрипа при работе устройств.
Для предотвращения указанных проблем на регулировочные пластины наносят тонкий слой (не более 0. 2-0.3 мм) специального твердосмазочного покрытия. Оно не выдавливается под воздействием высоких нагрузок и выдерживает многократные регулировки.
2-0.3 мм) специального твердосмазочного покрытия. Оно не выдавливается под воздействием высоких нагрузок и выдерживает многократные регулировки.
Износостойкость и длительный срок службы покрытий обусловлен свойствами твердых компонентов, входящих в их состав – чаще всего это дисульфид молибдена, ПТФЭ, графит, а также композиции из названных материалов.
Защитные покрытия отверждаются за 40 минут при нагреве. В отличие от обычных смазок, они не пачкаются и не оказывает токсичного воздействия на человека.
Фото регулировочных пластин до и после нанесения защитного состава на примере отечественного покрытия MODENGY 1014 смотрите ниже.
Рассмотрев особенности экзоскелетов, отметим, что эти технические устройства – не только инструмент для получения сверхсилы, но и последний шанс ходить для парализованный людей.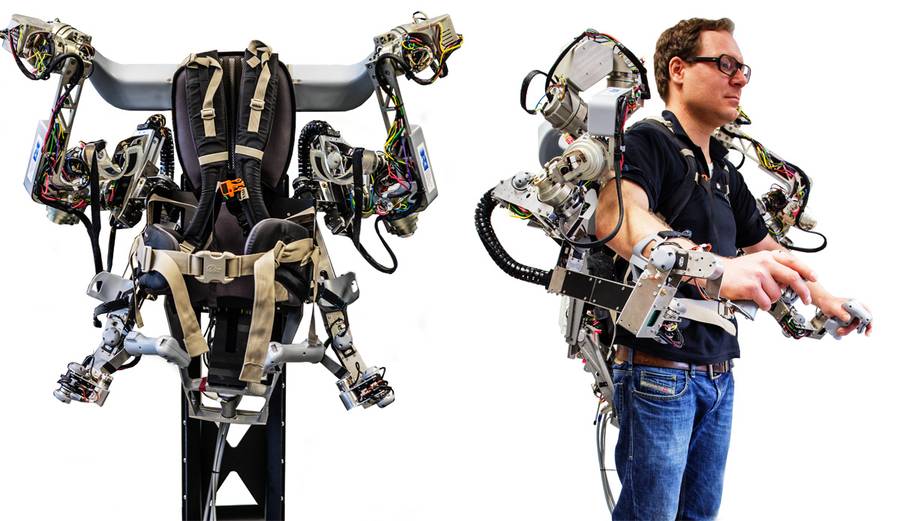
Роботизированные технологии помогают решить практически любые задачи в промышленности, строительстве и даже космосе. Однако на пути к массовому внедрению экзоскелеты должны преодолеть ряд проблем, особенно зависимость от внешних источников питания.
Специалисты рассчитывают, что в будущем эти устройства станут более доступными для обычных людей и обеспечат нам жизнь на новом технологическом уровне.
Возврат к списку
Экзоскелеты в здравоохранении: настоящее и будущее
Не так давно авторы научно-фантастических книг и фильмов фантазировали о том, как дать людям больше силы, защиты и выносливости с помощью металлических мышц и костей, и вот, наконец, такие устройства появились в виде экзоскелетов.
Это, как правило, роботизированные системы, которые прикрепляются к суставам для усиления силы мышц, когда это необходимо. Мобильные каркасы содержат компьютер в рюкзаке, который может управлять роботизированными компонентами в течение нескольких часов. Их цель — обеспечить поддержку спины, плеч, талии и бедер, чувствовать движение пользователя, а также помочь при подъеме и удержании тяжелых предметов при одновременном снижении нагрузки на спину. Первые прототипы не могли имитировать ходьбу, но они определенно становятся лучше, элементы становятся тоньше, их источник энергии становится сильнее, и, как показали последние новости, они уже могут управляться с помощью мыслей.
Их цель — обеспечить поддержку спины, плеч, талии и бедер, чувствовать движение пользователя, а также помочь при подъеме и удержании тяжелых предметов при одновременном снижении нагрузки на спину. Первые прототипы не могли имитировать ходьбу, но они определенно становятся лучше, элементы становятся тоньше, их источник энергии становится сильнее, и, как показали последние новости, они уже могут управляться с помощью мыслей.
Хотя кажется, что их легко изготовить, инженеры-механики сталкиваются с серьезными проблемами. Как обеспечить достаточную мощность для системы? Как создать гибкие в работе суставы? Как обнаружить и контролировать ложные движения? Как уменьшить вес компонентов таким образом, чтобы экзоскелет можно было носить в течение длительного времени? Как их настраивать под конкретного пользователя? На данный момент это требует серьезных усилий со стороны пользователя — обычным пациентам необходимо от 20 до 70 сеансов, чтобы научиться использовать существующие носимые роботизированные экзоскелеты.
Тем не менее, у этих мобильных систем есть потенциал в том, чтобы вернуть парализованным чувство движения, помочь врачам во время долгих часов хирургического вмешательства или даже удержать пенсионеров дольше на рабочих местах, требующих тяжелого физического труда.
Помощь парализованным людям
Компания Ekso Bionics, пионер в области робототехнических экзоскелетов, совместно Калифорнийским университетом в Беркли разработала экзоскелет, возвращающей движение людям с ослабленными конечностями и пациентам с параличом нижней части тела.
Это легкий по весу и простой в обращении экзоскелет на подвижной алюминиевой раме, который объединен с неинвазивной системой стимуляции спинного мозга. Пользователь надежно закрепляет его застежками на лодыжках, голенях, бедрах, на тазе и на груди и может снова ходить, используя собственные ноги и одновременно пользуясь поддержкой экзоскелета.
Сегодня эти роботизированные устройства используются лицами с различной степенью паралича, вызванного разными причинами, а также рабочими в различных отраслях промышленности в целях повышения силы и выносливости.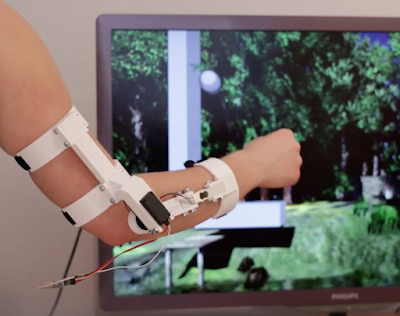
Первая версия устройства EksoGT получила одобрение FDA еще в 2015 году.
Последняя версия экзоскелета EksoNR воссоздает естественное движение ног и помогает пациентам заново научиться ходить, сидеть и делать все то, что они делали раньше. Новая модель отличается оптимизированной походкой, которая более естественна и лучше подходит для каждого пациента, она оснащена новым контроллером EksoView с сенсорным интерфейсом для врачей, а также множеством аналитических инструментов для мониторинга эффективности и настройки терапии в режиме реального времени.
Похожий по своим размерам на крупный смартфон, EksoView обеспечивает визуализацию различных упражнений, помимо тренировки походки, таких как балансировка, приседание с сидячего положения, подъем одной ноги или стояние на месте, для активного вовлечения пациентов и расширения использования этих полезных функций.
Оптимизированное программное обеспечение обеспечивает симметрию походки и обратную связь по позе и позволяет терапевтам отслеживать прогресс пациента с помощью облачного аналитического решения.
Еще одна замечательная компания — израильская компания ReWalk Robotics. Ее основателем стал доктор Амит Гоффер, который начал свои разработки в 2001 году после несчастного случая, изменившего его жизнь и сделавшего его парализованным. Он стал автором изобретения и инициатором разработки экзоскелета ReWalk Robotics, позволяющего снова ходить людям с параличом нижних конечностей. Несмотря на то, что в настоящее время эта технология не позволяет ему самому ходить из-за тяжести полученных им травм, его упорство в разработке легкого экзоскелета, чтобы другие могли ходить, проложило путь к созданию систем ReWalk Rehabilitation and Personal, которые используют сегодня более чем 1000 человек по всему миру. Система разрешена к использованию регулирующими органами в нескольких странах, включая США.
Эта система состоит из мягкой оболочки типа манжеты, которая накладывается на ногу, пострадавшую от инсульта, контрольного блока, похожего на небольшой рюкзак, и соответствующего приложения, которое позволяет специалистам по реабилитации корректировать его настройки.
Когда пациент делает шаги по полу пораженной ногой, ReStore Exo-Suit тянет эту ногу, чтобы обеспечить правильность выполнения шага. Система контролирует как силу, так и равномерность шага, что помогает пациенту заново научиться правильно ходить. Интересно, что в отличие от жестких экзоскелетов, устройство не мешает естественному движению человека и не дает пациенту почувствовать, что он находится внутри робота.
ReStore Exo-Suit предназначен для использования в реабилитационных центрах, поэтому пациенты не смогут тренироваться самостоятельно.
Роботизированную систему разработала и российская компания «ЭкзоАтлет». Она предназначена для больных с нижней параплегией, весит около 20 кг и стоит существенно меньше иностранных аналогов. Этот экзоскелет позволяет людям с нарушением двигательных функций ног передвигаться: ходить, подниматься и спускаться по лестницам, садиться и вставать без посторонней помощи. Алгоритмы управления экзоскелетом в автоматическом режиме воспроизводят максимально естественный для пациента паттерн ходьбы, что существенно ускоряет восстановление двигательной и нервной активности. Сейчас дорабатывается и версия роботизированного устройства для пациентов после инсульта.
Сейчас дорабатывается и версия роботизированного устройства для пациентов после инсульта.
Система управления экзоскелета для реабилитации пациентов с травмой позвоночника повторяет структуру ходьбы здорового человека. Ходьба инициируется с пульта управления или «умного костыля». На ранних этапах реабилитации система управления позволяет использовать для инициации движения шаг здоровой ноги, а на более поздних стадиях дает возможность ходить самостоятельно, контролируя правильность паттернов.
Новинки технологий для пациентов и… не только для них
За последние годы увеличилось количество компаний, занимающихся созданием экзоскелетов, которые могут помочь парализованным. В 2018 году японская компания Cyberdyne получила разрешение от Управления по контролю за продуктами и лекарствами США (FDA) для своего экзоскелета нижней части тела Hybrid Assisted Limb или HAL, которое теперь используется не только в США, но и в других странах.
Итальянские инженеры из Perceptual Robotics Laboratory разработали роботизированный экзоскелет Body Extender, который может помочь перемещать тяжелые предметы, поднимая около 50 килограммов в каждой из своих рук. В Европе сразу несколько компаний, например, швейцарские Hocoma и Reha Technology, также работают над созданием роботизированных систем, помогающих больным людям.
В Европе сразу несколько компаний, например, швейцарские Hocoma и Reha Technology, также работают над созданием роботизированных систем, помогающих больным людям.
Французский стартап Wandercraft разработал экзоскелет, использующий алгоритмы, способные анимировать 12 степеней свободы, необходимые для динамической и самосбалансированной ходьбы, а испанская компания Marsi Bionics работает над созданием носимого устройства, специально предназначенной для детей с заболеваниями нервно-мышечной системы.
Это только начало. По оценкам исследователей, мировой рынок таких устройств уже сегодня составляет более $125.6 млн и приносит более $100 млн в год, но к 2025 году его размер, как ожидается, достигнет почти $1.9 млрд.
Подобные автоматизированные системы могут помогать не только пациентам, перенесшим инсульт или травму спинного мозга, но и оказать большую поддержку медицинскому персоналу. Представьте себе, что спасатели убирают огромные камни, накрывшие людей под обрушившимися зданиями, медсестер, которым стало проще переносить тяжелых пациентов, или врачей, которым помогают экзоскелеты, выдерживающие долгие часы операций.
В марте 2019 года врачи одной из российских больниц заявили, что провели первую в Европе операцию с помощью экзоскелетов. Разработанный при участии «Лаборатории робототехники» Сбербанка промышленный экзоскелет ExoChair, оказывал поддержку хирургам во время операций длительностью более 12 часов.
В ходе тестирования ExoChair поддерживал как основного, так и ассистирующего хирургов во время операций разной степени сложности, в том числе эндоскопической и лапароскопической.
ExoChair — пассивный промышленный экзоскелет, предназначенный для разгрузки мышц спины и ног при выполнении работы в положении стоя, разрабатываемый ООО «Полезные роботы» при поддержке Лаборатории робототехники Сбербанка.
Подобные роботизированные устройства могут принести пользу не только врачам, но и медсестрам. Например, японские специалисты из Технологического института Канагавы разработали и создали прототип «силового костюма» с металлическим каркасом, который пристегивается к конечностям пользователя, чтобы буквально снять бремя с плеч (и спины) медсестер. Основная роль Power Assist Suit — помогать медсестрам и физиотерапевтам поднимать пациентов на кровати и с кроватей. При тестировании медсестра весом 64 килограмма смогла взять на руки и перенести пациента весом 70 килограммов.
Основная роль Power Assist Suit — помогать медсестрам и физиотерапевтам поднимать пациентов на кровати и с кроватей. При тестировании медсестра весом 64 килограмма смогла взять на руки и перенести пациента весом 70 килограммов.
Проведенное в 2019 исследование показало, что медсестры относятся к подобным устройствам в целом позитивно, но их чувства после эксперимента по отношению к экзоскелетам были неоднозначными. Они считали, что конструкции все еще нуждаются в доработке: они должны быть максимально простыми при использовании и легкими, а не обязательно стопроцентно надежными. Кроме того, привыкать к экзоскелетам необходимо еще во время обучения, поскольку студенты-медсестры могут легче адаптироваться к ним, чем те, кто уже привык применять свои собственные методы работы с пациентами.
В настоящее время экзоскелеты стоят очень дорого и практически недоступны для рядовых пациентов, даже имеющих хороший страховой полис. Но, учитывая их потенциал и предполагаемое экспоненциальное падение цен в ближайшие годы, экзоскелеты в скором времени станут действительно распространенными.
Подумайте, как экзоскелеты могут помочь нашему стареющему обществу. Они могли бы помочь пенсионерам дольше оставаться на работе, поскольку физические силы и выносливость больше не будут ограничивать их работу. И представьте себе все возможности «умных» экзоскелетов, которые могут предвидеть действия пользователей и реагировать на них, или роботизированные системы, управление которыми будет осуществляться напрямую с помощью мыслей. А ведь такие технологии уже на подходе.
Источник: evercare.ru
Эффективность применения экзоскелета ExoAtlet для восстановления функции ходьбы у больных рассеянным склерозом
Известно, что рассеянный склероз (РС), будучи тяжелым нейродегенеративным заболеванием ЦНС, постепенно приводит к формированию тяжелого неврологического дефицита, причем расстройства движений и равновесия, приводящие к нарушению поддержания позы и ходьбы, снижению мобильности, обнаруживаются у абсолютного большинства пациентов [1, 2]. При прогрессировании РС нарастание двигательных нарушений и функции ходьбы оказывает негативное влияние на уровень повседневной активности и качество жизни пациентов. Поэтому восстановление функции ходьбы у больных РС является одной из ведущих задач реабилитации. Для восстановления ходьбы ранее использовались различные методики лечебной физкультуры и физического воздействия как общего плана (например, аэробические упражнения малой и средней интенсивности), так и тренировки ходьбы и частичной разгрузки массы [3—5].
При прогрессировании РС нарастание двигательных нарушений и функции ходьбы оказывает негативное влияние на уровень повседневной активности и качество жизни пациентов. Поэтому восстановление функции ходьбы у больных РС является одной из ведущих задач реабилитации. Для восстановления ходьбы ранее использовались различные методики лечебной физкультуры и физического воздействия как общего плана (например, аэробические упражнения малой и средней интенсивности), так и тренировки ходьбы и частичной разгрузки массы [3—5].
Использование роботов, в том числе управляемых компьютером, в последние годы является одним из основных направлений нейрореабилитации. С целью тренировки ходьбы были разработаны роботизированные ортезы, при этом было показано, что роботизированное ассистирование ходьбе на тредмиле позволяло более эффективно поддерживать движения пациента, имитируя при этом близкую к нормальным показателям походку пациентов с Р.С. Было отмечено увеличение скорости ходьбы и возрастание силы мышц-разгибателей коленного сустава [6—8]. В одном из последних исследований [9] показано улучшение ходьбы в виде удлинения дистанции, однако это изменение фиксировалось на коротких расстояниях. Одновременно было отмечено улучшение равновесия, которое авторы связали с укреплением мышц-разгибателей коленного сустава. Важным аспектом было и улучшение психического состояния больных. Авторы отметили сохранение результатов курса в течение 3 мес и связали их с продолжительностью занятий (12 сеансов в течение 6 нед, 2 сеанса в неделю). В приведенных и других подобных исследованиях использовались различные роботизированные системы, привлекались пациенты с различной выраженностью неврологического дефицита по шкале EDSS. Была показана эффективность данного нейрореабилитационного подхода и подчеркивалась актуальность дальнейших исследований в этом направлении.
В одном из последних исследований [9] показано улучшение ходьбы в виде удлинения дистанции, однако это изменение фиксировалось на коротких расстояниях. Одновременно было отмечено улучшение равновесия, которое авторы связали с укреплением мышц-разгибателей коленного сустава. Важным аспектом было и улучшение психического состояния больных. Авторы отметили сохранение результатов курса в течение 3 мес и связали их с продолжительностью занятий (12 сеансов в течение 6 нед, 2 сеанса в неделю). В приведенных и других подобных исследованиях использовались различные роботизированные системы, привлекались пациенты с различной выраженностью неврологического дефицита по шкале EDSS. Была показана эффективность данного нейрореабилитационного подхода и подчеркивалась актуальность дальнейших исследований в этом направлении.
В настоящее время в реабилитационную практику в Российской Федерации внедряется экзоскелет ExoAtlet, который предназначен для социальной адаптации и медицинской реабилитации пациентов с двигательными нарушениями нижних конечностей вследствие заболеваний опорно-двигательного аппарата и нервной системы.
ExoAtlet представляет собой роботизированное устройство, оказывающее поддержание вертикальной позы и ходьбы в процессе нейрореабилитационной процедуры. Проведены пилотные исследования для оценки эффективности применения экзоскелета ExoAtlet у больных после спинальной травмы, оперативных вмешательств на позвоночнике, после инсульта [10, 11].
Цель настоящего пилотного исследования — изучение эффективности и безопасности экзоскелета ExoAtletAlbert АЛФН 1.00.00.00.001 Rev. B в комплексной терапии пациентов с РС.
Материал и методы
Проведение исследования было одобрено независимым этическим комитетом Московского областного научно-исследовательского клинического института им. М.Ф. Владимирского. Дизайн работы — открытая контролируемая наблюдательная программа.
В исследование были включены 20 пациентов с ремиттирующим РС (РРС) в стадии ремиссии и вторично-прогредиентным течением (ВПРС) с уровнем неврологического дефицита по шкале EDSS от 3 до 7 баллов.
Обязательным условием включения пациентов в исследование являлось наличие двигательного пареза нижних конечностей с изменением мышечного тонуса до 3 баллов по модифицированной шкале Ashworth (1964) для клинической оценки мышечного тонуса.
У всех пациентов диагноз РС был установлен на основании диагностических критериев McDonald (2010) [12].
Пациенты находились на постоянной терапии препаратом интерферона β-1б, при стандартном режиме дозирования.
По критерию «отказ пациента от сотрудничества» в процессе исследования были исключены 2 пациента. Таким образом, группу наблюдения составили 18 пациентов (9 мужчин и 9 женщин) в возрасте 28—59 лет (средний 43,9±2,1 года), из них 9 пациентов с РРС и 9 пациентов с ВПРС.
В контрольную группу вошли 50 здоровых лиц.
Для оценки выраженности неврологического дефицита и функционального состояния наряду со стандартным неврологическим осмотром использовали расширенную шкалу инвалидизации Куртцке (Expanded Disability Status Scale — EDSS), комплексную функциональную шкалу (Multiple Sclerosis Functional Composite — MSFC), включающую 3 субтеста: оценку ходьбы (Timed 25-Foot walk), оценку функций верхних конечностей (9-Hole Peg Test — 9-HPT), оценку мыслительных способностей (Paced Auditory Serial Addition Test — PASAT-3) [13, 14]. Соответствующая оценка состояния больных проводилась в 1-е, 7-е, 14-е сутки наблюдения.
Соответствующая оценка состояния больных проводилась в 1-е, 7-е, 14-е сутки наблюдения.
Для оценки выраженности тревожно-аффективных расстройств использовали госпитальную шкалу тревоги и депрессии (Hospital Anxiety and Depression Scale — HADS) [15], о сохранности когнитивных функций судили по результатам Монреальской шкалы оценки когнитивных функций (Montreal Cognitive Assessment — MoCA) [16].
Занятия с экзоскелетом проводились в течение 30—40 мин 1 раз в сутки ежедневно в течение 9—10 сут пребывания пациентов в стационаре. Реабилитационные занятия проводились по стандартной методике [17]. Их проведение осуществлялось группой специалистов, включающей невролога, выполнявшего функцию управления экзоскелетом с помощью планшета, и методиста по лечебной физкультуре (ЛФК).
Для изучения биомеханической структуры ходьбы пациентов до и после курса занятий в экзоскелете были использованы гибкие датчики силы — силоизмерительные стельки F-Scan фирмы «Tekscan» (США). Датчики располагались внутри обуви обследуемых, между стопой и подошвой ботинка. Эта технология измерения ранее была использована для изучения биомеханики ходьбы пациентов с ортопедическими и неврологическими заболеваниями [18, 19]. Исследовали основные параметры ходьбы (скорость, темп, длину двойного шага, длительность локомоторного цикла), временные параметры ходьбы (длительность опорной, переносной и двуопорной фаз, коэффициент ритмичности), а также вертикальную составляющую Rz опорной реакции и распределение давления под стопой. Преимуществом применения стелек по сравнению с традиционной динамометрией является возможность динамического исследования ходьбы пациента. Исследование большого количества опорных реакций позволило измерить коэффициент вариативности — параметр оценки степени освоения навыков ходьбы в экзоскелете, проанализировать изменения устойчивости и опороспособности по мере адаптации пациента к ходьбе в экзоскелете, проследить уменьшение времени опоры на костыли.
Эта технология измерения ранее была использована для изучения биомеханики ходьбы пациентов с ортопедическими и неврологическими заболеваниями [18, 19]. Исследовали основные параметры ходьбы (скорость, темп, длину двойного шага, длительность локомоторного цикла), временные параметры ходьбы (длительность опорной, переносной и двуопорной фаз, коэффициент ритмичности), а также вертикальную составляющую Rz опорной реакции и распределение давления под стопой. Преимуществом применения стелек по сравнению с традиционной динамометрией является возможность динамического исследования ходьбы пациента. Исследование большого количества опорных реакций позволило измерить коэффициент вариативности — параметр оценки степени освоения навыков ходьбы в экзоскелете, проанализировать изменения устойчивости и опороспособности по мере адаптации пациента к ходьбе в экзоскелете, проследить уменьшение времени опоры на костыли.
Статистическую обработку результатов проводили на персональном компьютере с применением пакета прикладных программ Statistica v. 6.0 («Statsoft»). Данные представлены в виде средних значений и ошибки среднего (M±m). При сравнении двух зависимых выборок применяли парный t-критерий Стьюдента и непараметрический тест Вилкоксона. Для всех видов статистического анализа различия между группами признавались статистически значимыми при допустимой вероятности ошибки р<0,05.
6.0 («Statsoft»). Данные представлены в виде средних значений и ошибки среднего (M±m). При сравнении двух зависимых выборок применяли парный t-критерий Стьюдента и непараметрический тест Вилкоксона. Для всех видов статистического анализа различия между группами признавались статистически значимыми при допустимой вероятности ошибки р<0,05.
Результаты и обсуждение
Полный курс восстановительного лечения с включением тренировок с применением экзоскелета ExoAtlet закончили все 18 пациентов: 9 с РРС (средний возраст 42,9±2,8 года), 9 — с ВПТ (средний возраст 45±4,4 года).
В процессе занятий была отмечена хорошая переносимость нагрузок в пределах 30—40 мин. Пациенты достаточно хорошо справлялись с предлагаемыми заданиями и их самочувствие во время занятий и после не ухудшалось. У всех пациентов был отмечен положительный настрой к проведению последующих занятий.
В результате лечения у 9 из 18 пациентов зарегистрировано улучшение состояния по шкале EDSS, в целом отмечена достоверная положительная динамика (p<0,01). Результаты исследования показателей функциональных систем и оценка EDSS у пациентов в 1-е, 7-е и 14-е сутки наблюдения приведены в табл. 1. Таблица 1. Динамика состояния отдельных функциональных систем и оценки EDSS (M±s) у обследованных пациентов в процессе терапии, баллы Примечание. * — p<0,05, ** — p<0,01 (критерий Вилкоксона). Как видно из приведенных данных, достоверные сдвиги были отмечены в отношении стволовых и пирамидных функций.
Результаты исследования показателей функциональных систем и оценка EDSS у пациентов в 1-е, 7-е и 14-е сутки наблюдения приведены в табл. 1. Таблица 1. Динамика состояния отдельных функциональных систем и оценки EDSS (M±s) у обследованных пациентов в процессе терапии, баллы Примечание. * — p<0,05, ** — p<0,01 (критерий Вилкоксона). Как видно из приведенных данных, достоверные сдвиги были отмечены в отношении стволовых и пирамидных функций.
Результаты исследования функций верхних и нижних конечностей, а также когнитивных функций по данным теста MSFC представлены в табл. 2. Таблица 2. Динамика показателей субтестов шкалы MSFC (M±m) у обследованных пациентов Примечание. * — p>0,05 (парный t-критерий Стьюдента). По большинству субтестов у обследованных пациентов была получена небольшая положительная, но статистически недостоверная динамика.
Исходно выраженность тревожных и депрессивных нарушений у обследованных пациентов была невысокой: лишь в 2 случаях были превышены нормальные показатели по субшкале депрессии, в 1 — по субшкале тревоги (табл. 3). Таблица 3. Динамика выраженности тревожно-депрессивных расстройств по шкале HADS и когнитивного статуса по MoCA (баллы). После проведенного курса реабилитации не отмечено существенной динамики, однако у пациентов с наибольшими показателями наблюдалось их снижение. В отношении когнитивной функции отмечен достоверный положительный сдвиг.
3). Таблица 3. Динамика выраженности тревожно-депрессивных расстройств по шкале HADS и когнитивного статуса по MoCA (баллы). После проведенного курса реабилитации не отмечено существенной динамики, однако у пациентов с наибольшими показателями наблюдалось их снижение. В отношении когнитивной функции отмечен достоверный положительный сдвиг.
При исследовании биомеханики ходьбы было обнаружено ее значительное нарушение по сравнению с показателями у здоровых. Было выявлено резкое замедление ходьбы в виде снижения основных параметров (темп, скорость и длина шага), значительная неустойчивость, выраженная асимметрия, снижение опорной и толчковой функций нижних конечностей, высокий коэффициент вариативности ряда параметров, явление цикличности вертикальной составляющей опорной реакции. После курса тренировки ходьбы в экзоскелете отмечено повышение темпа ходьбы, возросла устойчивость, уменьшились раскачивания туловища относительно фронтальной плоскости, значительно снизились временная и динамическая асимметрия, возросла опорная функция более пораженной конечности, что способствовало увеличению толчковой функции менее пораженной конечности, уменьшилось явление цикличности изменений вертикальной составляющей опорной реакции. Полученные изменения в группе в целом не достигали уровня достоверности, вероятно, вследствие большой вариативности показателей.
Полученные изменения в группе в целом не достигали уровня достоверности, вероятно, вследствие большой вариативности показателей.
В качестве примера восстановления биомеханики ходьбы после занятий приводим одно из наших наблюдений.
Больной Ч., 54 года, продолжительность РС 2,5 года. В течение 1-го года у пациента зарегистрированы 3 обострения, затем — переход течения заболевания в ВПРС. Неврологический статус: нижний спастический парапарез со снижением силы мышц до 2,5—3 баллов справа, 3—3,5 балла слева. Мышечный тонус повышен до 2—3 баллов по шкале Ashwort, больше справа. Умеренные признаки мозжечковой атаксии, двустороннее снижение вибрационной чувствительности. Неврологический дефицит по шкале EDSS 4,5 балла.
Пациенту в течение 2 нед был проведен курс из 8 тренировок с роботизированной поддержкой ходьбы и вертикальной позы с помощью экзоскелета ExoAtlet. Тренировкам предшествовали занятия лечебной физкультурой, включающие дыхательные упражнения, пассивные и активные движения верхних и нижних конечностей, чередующиеся с периодами релаксации. В процессе занятий, проходивших в помещении, пациент в экзоскелете выполнял ходьбу на месте, передвижение по прямой линии, повороты, движение по синусоиде. Непосредственная продолжительность тренировок с экзоскелетом не превышала 20 мин в связи с выраженностью двигательных нарушений. Исходно при ходьбе у больного отмечались резкие раскачивания туловища во фронтальной плоскости, шаткость походки, цепляние носком правой ноги об опорную поверхность. Больной передвигался с односторонней опорой на трость левой рукой. Отмечено грубое нарушение биомеханики ходьбы, проявляющееся в снижении темпа, резкой временной асимметрии, снижении устойчивости и опороспособности обеих нижних конечностей. При постановке стопы наблюдается одновременное прикосновение пятки и латеральной стороны плюсны (табл. 4). Таблица 4. Показатели биомеханики ходьбы больного Ч. до и после лечения в сравнении с показателями контрольной группы Примечание. 1 — p<0,05 по сравнению с контрольной группой; 2 — p<0,05 по сравнению с показателем до лечения.
В процессе занятий, проходивших в помещении, пациент в экзоскелете выполнял ходьбу на месте, передвижение по прямой линии, повороты, движение по синусоиде. Непосредственная продолжительность тренировок с экзоскелетом не превышала 20 мин в связи с выраженностью двигательных нарушений. Исходно при ходьбе у больного отмечались резкие раскачивания туловища во фронтальной плоскости, шаткость походки, цепляние носком правой ноги об опорную поверхность. Больной передвигался с односторонней опорой на трость левой рукой. Отмечено грубое нарушение биомеханики ходьбы, проявляющееся в снижении темпа, резкой временной асимметрии, снижении устойчивости и опороспособности обеих нижних конечностей. При постановке стопы наблюдается одновременное прикосновение пятки и латеральной стороны плюсны (табл. 4). Таблица 4. Показатели биомеханики ходьбы больного Ч. до и после лечения в сравнении с показателями контрольной группы Примечание. 1 — p<0,05 по сравнению с контрольной группой; 2 — p<0,05 по сравнению с показателем до лечения.
В результате сравнительно непродолжительного курса восстановительного лечения у пациента клинически было отмечено улучшение состояния в виде увеличения мышечной силы в сгибателях и разгибателях правого коленного сустава, в сгибателях подошвы правой стопы, снижение мышечного тонуса в мышцах правой ноги на 1 балл по шкале Ashwort. Неврологический дефицит по шкале EDSS после лечения — 3,5 балла. У пациента произошло достоверное улучшение основных и временных параметров ходьбы: увеличение темпа ходьбы на 14%. На обеих ногах уменьшилась продолжительность опорной фазы: на 12% на левой ноге, на 20% на правой ноге. Одновременно возросла длительность переносной фазы: на левой ноге на 45%, на правой ноге на 26%. На обеих ногах отмечено уменьшение продолжительности двуопорной фазы (на левой ноге на 31%, на правой ноге на 40%), что указывает на повышение устойчивости при ходьбе.
На рисунке Вертикальная составляющая Rz опорной реакции правой ноги в норме и у пациента Ч. Пунктирная кривая — норма; кривая 1 — до тренировки; 2 — после тренировки больного. По оси ординат — сила реакции (%/Н). представлены графики вертикальной составляющей Rz опорной реакции правой ноги в норме (контрольная группа) и у пациента Ч. до и после тренировок в экзоскелете. Как видно по результатам показателей, до начала курса ходьбы в экзоскелете на правой, более пораженной ноге отмечалось значительное снижение амплитуды. Так, величина переднего толчка была равна 65% от массы тела, минимума — 55%, заднего толчка — 68%. При этом отмечено изменение формы Rz-кривой: затягивался передний фронт, передний толчок приходился на 30% локомоторного цикла, минимум на 35%, в то время как задний толчок развивался довольно быстро, примерно к 50% локомоторного цикла.
По оси ординат — сила реакции (%/Н). представлены графики вертикальной составляющей Rz опорной реакции правой ноги в норме (контрольная группа) и у пациента Ч. до и после тренировок в экзоскелете. Как видно по результатам показателей, до начала курса ходьбы в экзоскелете на правой, более пораженной ноге отмечалось значительное снижение амплитуды. Так, величина переднего толчка была равна 65% от массы тела, минимума — 55%, заднего толчка — 68%. При этом отмечено изменение формы Rz-кривой: затягивался передний фронт, передний толчок приходился на 30% локомоторного цикла, минимум на 35%, в то время как задний толчок развивался довольно быстро, примерно к 50% локомоторного цикла.
В результате курса тренировки ходьбы в экзоскелете у пациента отмечено значительное улучшение динамических параметров ходьбы, в частности вертикальной составляющей Rz опорной реакции. На правой ноге амплитуда всех экстремальных значений возросла: величина переднего толчка увеличилась на 68% (110,1%), минимума — на 78% (98,4%), заднего толчка — на 76% (120,0%). Кривая приобрела отчетливую двугорбую форму, однако все экстремальные значения остались сдвинуты вправо по временной оси по сравнению с нормой. Таким образом, после курса тренировки у пациента существенно уменьшилась динамическая асимметрия нижних конечностей, что проявилось, в частности, улучшением показателей ходьбы по показателям Timed 25-Foot walk шкалы MSFC.
Кривая приобрела отчетливую двугорбую форму, однако все экстремальные значения остались сдвинуты вправо по временной оси по сравнению с нормой. Таким образом, после курса тренировки у пациента существенно уменьшилась динамическая асимметрия нижних конечностей, что проявилось, в частности, улучшением показателей ходьбы по показателям Timed 25-Foot walk шкалы MSFC.
Таким образом, в результате проведенного открытого контролируемого пилотного исследования эффективности и безопасности применения экзоскелета ExoAtlet при реабилитации у 18 больных РС в качестве роботизированного устройства для ассистирования ходьбе и поддержания позы были получены положительные результаты. У всех пациентов отмечена хорошая переносимость предложенных нагрузок, каких-либо нежелательных явлений в ходе наблюдения за пациентами не зарегистрировано. В результате проведенного курса из 9—10 реабилитационных занятий с использованием экзоскелета ExoAtlet было получено достоверное улучшение показателя EDSS, в том числе по функциональным шкалам, оценивающим ствол мозга, пирамидную систему, чувствительность. Была отмечена положительная динамика по субшкале Timed 25-Foot walk шкалы MSFC, по субшкалам тревоги и депрессии шкалы HADS, а также достоверное улучшение показателей MoCA-теста.
Была отмечена положительная динамика по субшкале Timed 25-Foot walk шкалы MSFC, по субшкалам тревоги и депрессии шкалы HADS, а также достоверное улучшение показателей MoCA-теста.
При изучении биомеханики ходьбы пациентов с РС наблюдалось резкое замедление ходьбы: снижение основных параметров (темп, скорость и длина шага), значительная неустойчивость, выраженная асимметрия, снижение опорной и толчковой функций нижних конечностей, высокий коэффициент вариативности ряда параметров, явление цикличности вертикальной составляющей опорной реакции. После курса тренировки ходьбы в экзоскелете происходило повышение темпа ходьбы, возрастала устойчивость, уменьшились раскачивания туловища во фронтальной плоскости, снижались временная и динамическая асимметрия, возрастала опорная функция более пораженной конечности, что способствовало увеличению толчковой функции менее пораженной конечности, исчезали явления цикличности изменений вертикальной составляющей опорной реакции.
Представленные результаты пилотного исследования показали перспективность дальнейших исследований возможностей роботизированного ассистирования ходьбе и поддержания вертикальной позы с помощью экзоскелета ExoAtlet с целью восстановления способностей передвижения у больных РС с двигательными нарушениями.
Авторы заявляют об отсутствии конфликта интересов.
*e-mail: [email protected]
Экзоскелеты ног
Экзоскелеты — это устройства, которые улучшают работоспособность человека, который их носит, или улучшают способность передвигаться человека, страдающего патологией ног. Основываясь на различиях в механической конструкции, экзоскелеты можно разделить на два типа: силовые экзоскелеты и пассивные экзоскелеты.
Цель исследования экзоскелета в Делфтской лаборатории биоробототехники — помочь людям ходить. Они могут быть либо для более эффективной ходьбы, либо для помощи людям с нарушениями ходьбы. Для достижения этой цели были разработаны различные экзоскелеты и ортопедические устройства.
Исследование пассивного экзоскелета
XPED Project
Может ли ходьба быть более эффективной? Модели показывают, что во время ходьбы энергия излишне рассеивается. Если мы сможем сохранить «тормозную» энергию и использовать ее для ускорения ходьбы, наша походка станет более эффективной. В лаборатории мы работаем над экзоскелетами, которые способны на это и позволяют вам ходить более эффективно. Узнайте, как это сделать, в одной из наших публикаций (нажмите здесь) и посмотрите, как это работает в фильме.
В лаборатории мы работаем над экзоскелетами, которые способны на это и позволяют вам ходить более эффективно. Узнайте, как это сделать, в одной из наших публикаций (нажмите здесь) и посмотрите, как это работает в фильме.
Этот проект является результатом сотрудничества Университета Твенте и Технологического университета Делфта.
Исследование экзоскелета с электроприводом
MINDWALKER — Проект доступных и вспомогательных ИКТ ЕС FP7
Из-за травмы или болезни некоторые люди потеряли способность контролировать определенные мышцы и больше не могли ходить самостоятельно. Недостаток мобильности часто приводит к ограниченному участию в общественной жизни. Одним из возможных решений является использование роботизированного устройства для их поддержки и обучения их восстановлению способности ходить. Экзоскелет MINDWALKER имеет пару роботизированных ног, которые используют как биосигналы (ЭЭГ, ЭМГ), так и небиосигналы (акселерометр, тензодатчики и энкодеры) для естественного движения человеческих ног.
Цель этого проекта EU FP7 – разработать систему, позволяющую людям с ограниченными возможностями нижних конечностей ходить, что позволит им выполнять свои обычные повседневные действия наиболее автономным и естественным образом.
Проект охватывает 3 основные области знаний:
- Технологии BCI
- Виртуальная реальность
- Экзоскелет Мехатроника и управление
Целью проекта высшего уровня является объединение опыта для разработки интегрированной системы MINDWALKER. Кроме того, система должна пройти процесс клинической оценки. В Нидерландах Технический университет Делфта отвечает за механическое проектирование и интеграцию мехатроники, а Университет Твенте отвечает за баланс и управление экзоскелетом.
SYMBITRON – проект ЕС FP7
SYMBITRON нацелен на крупный технологический скачок в области симбиотического взаимодействия человека и машины. В частности, результаты проекта заметно улучшат жизнь (частично) парализованных людей за счет разработки превосходного носимого экзоскелета. Такие системы предназначены для того, чтобы дать пациентам с травмами спинного мозга (SCI) возможность ходить и преодолевать препятствия в повседневной жизни. На сегодняшний день носимые экзоскелеты все еще не достигают этой амбициозной цели, и желание преодолеть разрыв формирует движущую силу этого проекта. Консорциум был сформирован на основе ключевых научных и клинических компетенций партнеров и многолетнего опыта в области взаимодействия человека и машины, а также их отличной инфраструктуры и доступа к большому пулу пациентов с ТСМ. Централизованный подход уникален в области исследований благодаря своей конструкции, ориентированной на пациента, что приводит к полностью индивидуальному решению, которое дополняет уникальные оставшиеся возможности каждого отдельного пациента. Мы также будем первыми, кто воспроизведет физиологические нервно-мышечные функции в экзоскелете, в то же время плавно интегрируя остаточные человеческие функции (характеристики мышц, рефлексы и т. д.).
Такие системы предназначены для того, чтобы дать пациентам с травмами спинного мозга (SCI) возможность ходить и преодолевать препятствия в повседневной жизни. На сегодняшний день носимые экзоскелеты все еще не достигают этой амбициозной цели, и желание преодолеть разрыв формирует движущую силу этого проекта. Консорциум был сформирован на основе ключевых научных и клинических компетенций партнеров и многолетнего опыта в области взаимодействия человека и машины, а также их отличной инфраструктуры и доступа к большому пулу пациентов с ТСМ. Централизованный подход уникален в области исследований благодаря своей конструкции, ориентированной на пациента, что приводит к полностью индивидуальному решению, которое дополняет уникальные оставшиеся возможности каждого отдельного пациента. Мы также будем первыми, кто воспроизведет физиологические нервно-мышечные функции в экзоскелете, в то же время плавно интегрируя остаточные человеческие функции (характеристики мышц, рефлексы и т. д.).
Эта концепция восстановит двунаправленное взаимодействие между парализованными частями тела и остальным телом. Основываясь на этой фундаментальной концепции, основными целями SYMBITRON являются (i) разработка безопасного биоинспирированного персонализированного носимого экзоскелета, который может гибко дополнять любую оставшуюся функцию ходьбы у пациентов с травмой спинного мозга, позволяя им ходить без дополнительной помощи, (ii) развивать учебную среду и протоколы обучения для пациентов с ТСМ и их врачей, а также (iii) обеспечить клиническое подтверждение концепции безопасности и функциональности системы. Четырехлетний проект включает в себя 7 рабочих пакетов и направлен на максимальное воздействие на качество жизни пациентов, на социальные расходы и на общее понимание симбиотического взаимодействия человека и машины.
Основываясь на этой фундаментальной концепции, основными целями SYMBITRON являются (i) разработка безопасного биоинспирированного персонализированного носимого экзоскелета, который может гибко дополнять любую оставшуюся функцию ходьбы у пациентов с травмой спинного мозга, позволяя им ходить без дополнительной помощи, (ii) развивать учебную среду и протоколы обучения для пациентов с ТСМ и их врачей, а также (iii) обеспечить клиническое подтверждение концепции безопасности и функциональности системы. Четырехлетний проект включает в себя 7 рабочих пакетов и направлен на максимальное воздействие на качество жизни пациентов, на социальные расходы и на общее понимание симбиотического взаимодействия человека и машины.
Evryon — EU FP7 Воплощенный интеллект ИКТ Project
Дизайн – это мастерство. Несмотря на большую помощь компьютера, все же человек принимает наиболее важные дизайнерские решения. В проекте Evryon нам нравится ломать эту догму. В этом проекте мы разрабатываем новую стратегию, в которой экзоскелеты полностью создаются компьютером. Моделирование и оптимизация механики и методов управления приводит к лучшей компоновке экзоскелета.
Моделирование и оптимизация механики и методов управления приводит к лучшей компоновке экзоскелета.
Целью проекта Evryon является разработка нового подхода к проектированию носимых роботов (WR), которые можно использовать для таких приложений, как реабилитация, помощь, аугментация человека и многое другое. Проект направлен на создание механических структур путем оптимизации.
Моделирование ходьбы человека
Одним из достижений проекта стал 2D-симулятор, в котором можно моделировать взаимодействие между экзоскелетом и его пользователем.
Пневматический ортез на голеностопный сустав
В рамках проекта Evryon разработан пневматический ортез на голеностопный сустав (AFO). Ортез приводится в действие пневматической мышцей. Ортез функционирует как платформа для тестирования различных стратегий управления.
Контакт
ван дер Коой, проф.д-р. H. (Herman)
Все места — Rewalk Robotics, Inc.

Рейнбоу реабилитационные центры
17187 N. Laurel Park Drive
Livonia, MI 48152
USA
REHIGAN HOSTARD of Michigan (RIM)
. 261 Mack Blvd
Detroit, MI 48201
USA
Sparrow Health
1200 East Michigan Avenue
Lansing, MI 48909
USA
1 Special Tree0062
39000 Chase Street
Romulus, MI 48174
USA
St Joseph Mercy Hospital
5301 McAuley Drive
. MI 48152
США
Walk The Line
23800 W. 10 Mile Rd. STE# 193
10 Mile Rd. STE# 193
Southfield, MI 48033
США
Реабилитационный институт Courage Kenny
800 E 28th St
Minneapolis, MN 55407
USA
Community Sports & Therapy Center
903 East Wayne Street
Celina, OH 45822
USA
Erie County Medical Center
462 Grider Street
Buffalo , NY 14215
USA
Медицинский центр Upstate
505 Irving Ave
Syracuse, NY 13210
USA
Project Walk Portsmouth
30019 Stratham, NH 03885
USA
Регионов больницы
640 Jackson Street
St. Paul, MN 55101
USA
HOSTARNIO Mercy
1176 Town and Country Commons
Chesterfield, MO 63017
США
Методистский реабилитационный центр
1350 E Woodrow Wilson Ave
Jackson, MS 39216
США
Реабилитация Каролины
1100 Блайт Бул.
ReWalk ReStore
Телефон: (973) 731-3600
Эл.0002 785 Мамаронек Авеню
Уайт Плейнс, Нью-Йорк 10605
США
ReWalk ReStore
Phone: (914) 597-2200
E-Mail: [email protected]
Website
Helen Hayes Hospital
51 Route 9W N
West Haverstraw, NY 10993
USA
Oklahoma City VA Health Care System
921 NE 13th St
Oklahoma City, OK 73104
США
James J. Peters VA Medical Center
130 West Kingsbridge Road
Bronx, NY 10468
USA
Mount Sinai Hospital
One Gustave L. Levy Place
New York, NY 10029
USA
Southeast Louisiana Veteran’s Health Care System
2400 Canal St
New Orleans, LA 70119
США
Институт Раска
100 6003
240 East 9, NY09 New York 10 609 New York St0019 USA
Sunnyview Rehabilitation Hospital
1270 Belmont Avenue
Schenectady, NY 12308-2198
USA
Syracuse VA Medical Center
800 Irving Avenue
Syracuse, NY 13210
USA
Drake Center
151 У. Гэлбрейт Роуд.
Гэлбрейт Роуд.
Cincinatti, OH 45216
USA
Мемориальный госпиталь Audie L. Murphy VA
7400 Merton Minter
San Antonio, TX 78229
США
Медицинский центр Louis Stokes Cleveland VA, кампус Wade Park
10701 East Blvd.
Cleveland, OH 44106
USA
Universty Of Oklahoma Health Sciences Center
1200 N Stonewall Ave
Oklahoma City, OK 73117
USA
Warm Springs Rehabilitation Hospital of San Antonio
5101 Medical Dr
San Антонио, Техас 78229
США
Орегонский университет здравоохранения и наук
3303 SW Bond Ave.
Portland, OR 97239
USA
Magee Riverfront Outpatient Health and Wellness
1500 South Columbus Boulevard
Philadelphia, PA 19147
USA
MossRehab
60 Township Line Road
Элкинс Парк, Пенсильвания 19027
США
ReWalk ReStore
Телефон: (215) 663-6000
Электронная почта: contact@rewalk. com
com
Веб-сайт
Shriners Hospitals for Children
3551 N. Broad Street
Philadelphia, PA 19140-4131
USA
Roper St. Frances Healthcare
316 Calhoun St.
Charleston, SC 29401
USA
Sanford Health
1305 West 18th St
Sioux Falls, SD 57117
США
Бостонский университет: Лаборатория нейромоторного восстановления
100 Ashmont Street
Boston, 1 MA, 0
США
RESTORE
Веб -сайт
Мадонна Реабилитационная больница
17500 Burke Street
Omaha, NE 68118
USA
NEUBAILD
866 E 78 -й проз
411 N Washington Ave
Даллас, Техас 75246
США
REACT SCI
15046 Кольцевая дорога
Addison, TX 75001
USA
Реабилитационная больница Джексона
1611 N. W. 12th Avenue
W. 12th Avenue
Miami, Florida 33136-1096
USA
St. David’s Rehabilitation
1005 E 32nd Street
Austin, TX 78765
USA
Orlando Health and Rehabilitation
830 29th St
Orlando, FL 32805
США
TIRR Мемориал Германа – Кирби Глена
2455 S Braeswood
Хьюстон, Техас 77030
США
Эмори Реабилитационная больница
1441 Clifton Road, NE
Сом. Lake City, UT 84132
USA
Touro Rehabilitation Center
1401 Foucher Street
New Orleans, Louisiana 70115
USA
VCU 90 Marshall Street 90
9 Richmond, VA 23298
USA
Milwaukee VA Medical Center
5000 W National Ave
Milwaukee, WI 53295
USA
Seattle VA
1660 S Columbian Way
Seattle, WA 98108
USA
Медицинский центр Вашингтонского университета
1959 NE Pacific St.
Seattle, WA 98195
USA
Больница Froedtert
9200 W Wisconsin Avenue
Milwaukee, 6 532, WI0019 USA
Реабилитационный центр радуги
5570 Whittaker Rd
Ypsilanti, MI 48197
USA
Hope Network Rebilitation
2775 E -LANSING HOPE NENTENTERENTIONE
2775 E -LANSING HOPE NELENTENTION NEURITIN
11151 Кенвуд Роуд.
Cincinnati, OH 45242
USA
Harris Sports Medicine & PT
3971 Little Savannah Rd
Cullowhee, NC 28723
USA
Fit-N-Wise Rehabilitation and Performance Center
609 Medical Center Dr,
Decatur, Texas 76234
USA
MetroHealth
2500 Metrohealth Dr.
Cleveland, OH 44109
USA
Insight Pain Management & Neurosurgery
4800 Saginaw St
Flint, MI 48507
USA
Progressive Rehabilitation Medicine
6005 Rockwell Drive, NE ste B
Сидар-Рапидс, Айова 52402
США
ReStore
Телефон: (319) 540-8089
Веб-сайт
Неврологический институт Барроу
350 W Thomas Rd
Phoenix, AZ 85013
США
3
32
ReStore
ReStore
Веб-сайт
Реабилитационный институт имени Джона Кеннеди Джонсона
65 James St,
Edison, NJ 08820
США
ReStore
Phone: (732) 321-7070
Website
Greenville Health System
701 Grove Road
Greenville, SC 29605
USA
Center for Neurological Development
78 Main St
Burkettsville, OH 45310
США
ReStore
Медицинский центр Северной Миссисипи
81 S. Eason Blvd
Eason Blvd
Tupelo, MS 38804
США
Реабилитационный институт Сент -Луиса
4455 Duncan Ave.
Сент -Луис, MO 63110
USA
Ядро — Центр Recoverd of Revelable и упражнения
Wation Wation and Degrain 9002
Wation
Wation
— Центр Recoverd and Emergy. Дорога 434
Longwood, FL 32750
США
Miami Physical Therapy Associates
2869 SW 27th Ave.
Miami, FL 33133
USA
Институт Baylor.0019 411 N. Washington Ave, Ste 4000
Dallas, TX 75246
USA
VA Medical Center Miami
1201 N. W. 16th St.
W. 16th St.
Miami, FL 33125
USA
ADAPT Physical Therapy
5622 N Portland Ave, Ste 101
Oklahoma City, OK 73112
USA
Healthsouth Harmarville Rehabilitation
320 Guys Run Road
Pittsburgh, Пенсильвания 15238
США
Хьюстон, Вирджиния
Майкл Э. Дебейки, Вирджиния Медицинский центр
2002 Holcombe Blvd
Хьюстон, Техас 77030
США
ReWalk
Телефон: 713-791-1414 | 800-553-2278
E-mail: [email protected]
Веб-сайт
Джеймс А. Хейли ветеранов больница
13000 Брюс Б. Даунс. Louis VA
St. Louis VA- Jefferson Barracks Division
1 Jefferson Barracks Dr.
SCI Building #52-2S 35
Сент-Луис, Миссури 63125
Brooks Rehabilitation
3599 University Blvd South
Jacksonville, FL 32216
USA
REWALK RESTORE
Телефон: (904) 345-7600
E-mail: contact@rewalk. com
com
Веб-сайт
Университет Мэриленда Реабилитация и Ортопедический Институт
2200 Керн.0019 США
Мичиганский медицинский университет Мичигана
355 Briarwood Circle, Building. 4
Ann Arbor, Mi 48108
США
Клиника Хатчинсона
2101 N. Waldron Street
Hutchinson, KS 67502
USA
Michael E. Debakey VA Medical Center
Michael E. Debakey VA Medical Center
Michael E. Debakey Va Medical Center
Michael E. Debakey VA.
США
Медицинская школа Икана на горе Синай
3 East 101st Street
Нью-Йорк, штат Нью-Йорк 10029
США
Медицинский центр Hunter Holmes McGuire VA
1201 Broad Rock Blvd.
Richmond, VA 23249
USA
Touchstone Rehabilitation
5055 E Washington St.
Suite # 125
Phoenix, AZ 85034
USA
ReWalk ReStore
Телефон: (602) 277-1073
Электронная почта: [email protected]
Веб-сайт
Физическая терапия Ригби
711 Ригби Лейк -Драйв, STE 1301
Ригби, Айдахо 83442
USA
CASA Colina Hospital и Центры для Healthcare
255 EaiTA AVEN
POMONA для Healthcare
255 EAVEA
POMONA
255 EAVENA
POMONA
255 EAVENA AVENA
POMONA.
ReWalk ReStore
Телефон: (909) 596-7733
Эл.0019 Northridge, CA
USA
Precision Rehabilitation
3294 East Spring Street
Long Beach, CA
United States
ReWalk ReStore
Телефон: (562) 988-3570
Эл.
Даллас, Техас 75216
США
Renue Health
PO Box 12817
Сан -Диего, Калифорния
США
Университет Юты здравоохранения
Здоровье Сахарного дома, 1138 E. Wilmington Sta.
2999 Здравоохранение DR
Сан -Диего, CA
USA
Gaylord Specialty Healthcare
50 Gaylord Farm Road
Wallingford, CT 06492
USA
111111111111111111111111.0062
163 Veterans Dr,
White River Junction, VT 05009
США
ReStore
Phone: (802) 295-9363
Website
St. Jude Centers for Rehab and Wellness
2767 E Imperial Hwy
Brea, CA
UC Davis
4860 Y Street
Сакраменто, Калифорния 95817
США
NextStep Atlanta
1755 GASSLAND PKWY B,
Alpharetta, GA 30004
USA
VA Hospital Long Beach
5901 E 7th ST
Long Beach, CA
USA
9
va Beach, CA
USA
9
VA Beach, CA
USA
10918 VA Beach. Miranda Ave
Miranda Ave
Palo Alto, CA 94303
USA
VA Medical Center San Diego
3350 La Jolla Village Dr.
San Diego, CA
USA
3
61 Craig0002 3425 S. Clarkson Street
Englewood, CO 80113
USA
Больница для специального ухода
2150 Corbin Ave
New Britain, CT 06053
USA
Kindred Rebilation Hospitation of Wiscons
CONDRED MOLDED REABITIT Waukesha, WI 53188
USA
Memorial Rehab Hospital
3600 Washington Street
Hollywood, FL 33021
USA
Carilion Clinic
2331 Franklin Road
Roanoke, VA 24014
USA
Encompass Health Rehabilitation Hospital of Memphis
1282 Union Ave,
MEMPHIS, TN 38104
9 111.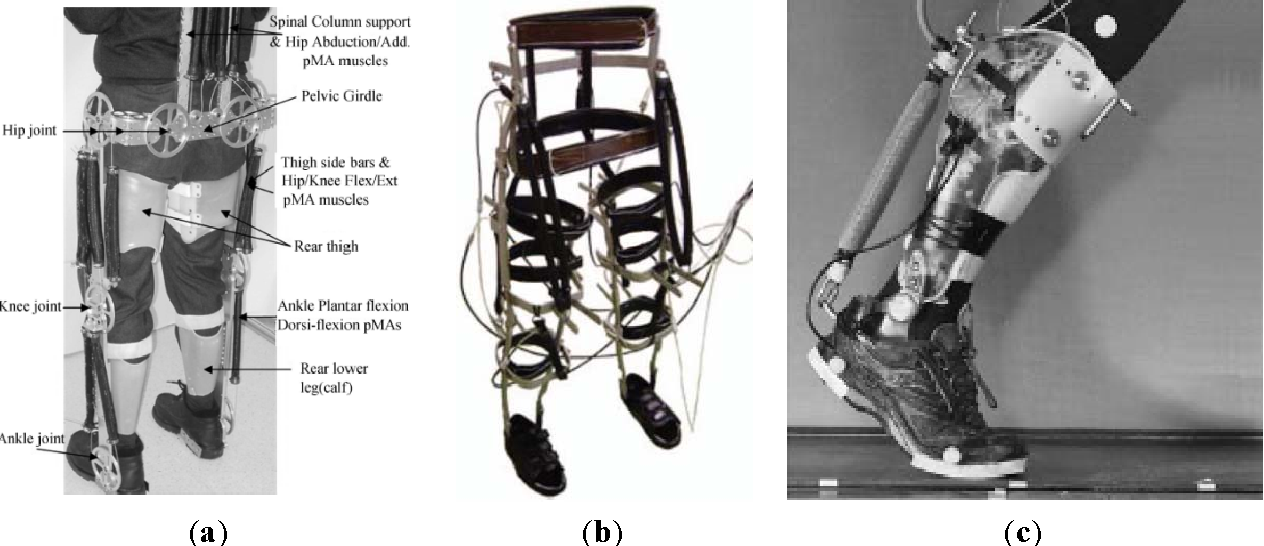 N. WA SYSTER CARECCARE 9003 9003
N. WA SYSTER CARECCARE 9003 9003
606111111. N. VA WA SYSTER. 16th Street
Miami, FL 33125
USA
Sunrise Rehab (Healthsouth)
4399 N Nob Hill Road
Sunrise, FL 33351
USA
Shepherd Center
2020 Peachtree Road NW
Atlanta, GA 30309-1465
USA
Marianjoy Rehabilitation Hospital
26 W171 Roosevelt Road
Wheaton, IL 60187
USA
Next Steps SCI
8434 South Corcoran Road
Willow Springs, IL 60480
USA
ReWalk ReStore
Телефон: (708) 467-0657
Электронная почта: [email protected]
Веб-сайт
McLaren Bay Region
3190 E Midland Rd
Бэй-Сити, Мичиган 48706
США
Shirley Ryan AbilityLab (ранее RIC)
355 East Erie Street
9000 США
2 Штаты 1
ReWalk ReStore
Телефон: (312) 238-1000
Эл. 0019 USA
0019 USA
Rehabilitation Hospital of Indiana (RHI)
4141 Shore Dr
Indianapolis, IN 46254
USA
Center for Neuro Skills
5215 Ashe Rd
Bakersfield CA
USA
Mid America
5701 W 110th St
Overland Park, KS 66211
USA
San Joaquin Valley Rehab
7173 N Sharon Ave
Fresno, CA
USA
0 Spation Hospital0062
300 First Ave
Charlestown, MA 02129
USA
VA Boston Healthcare System West Roxbury Division
1400 VFW Parkway
West Roxbury, MA 02132
USA
Vidant Medical Center
2100 Stantonsburg RD
Greenville, NC 27834
USA
University of Maryland Medical Center
100 Penn St.
Baltimore, MD 21201
USA
New England Rehab Portland ME
335 Brighton Ave
Portland, ME 04102
USA
MARY FREE Free Bed Hospital и реабилитационный центр
235 Wealthy St SE
Grand Rapids, MI 49503-5299
USA 9003
. нагрузка при махе на инструментальном тренажере ноги | Журнал нейроинженерии и реабилитации
- Исследования
- Открытый доступ
- Опубликовано:
- Жюль Бесслер-Эттен
ORCID: orcid.org/0000-0001-7283-917X 1,2 , - Leendert Schaake 1 ,
- Gerdienke B. Prange-Lasonder 1,3 &
- …
- Jaap H. Buurke 1,2
 Prange-Lasonder 1,3 &
Prange-Lasonder 1,3 & Журнал нейроинженерии и реабилитации
том 19 , номер статьи: 13 (2022)
Процитировать эту статью
1631 Доступ
3 Цитаты
Сведения о показателях
Абстрактный
Фон
Экзоскелеты работают параллельно с человеческим телом и могут поддерживать движение человека, прилагая усилия через манжеты или ремни. Они склонны к смещению, вызванному упрощенной механикой соединения и неправильной посадкой или расположением. Эти несоосности являются общей проблемой безопасности, поскольку они могут вызывать нежелательные силы взаимодействия. Однако точные механизмы и влияние перекосов на нагрузку на суставы пока неизвестны. Таким образом, целью данного исследования было изучение влияния различных направлений и величин смещения экзоскелета на внутренние усилия и крутящие моменты коленного сустава искусственной ноги.
Они склонны к смещению, вызванному упрощенной механикой соединения и неправильной посадкой или расположением. Эти несоосности являются общей проблемой безопасности, поскольку они могут вызывать нежелательные силы взаимодействия. Однако точные механизмы и влияние перекосов на нагрузку на суставы пока неизвестны. Таким образом, целью данного исследования было изучение влияния различных направлений и величин смещения экзоскелета на внутренние усилия и крутящие моменты коленного сустава искусственной ноги.
Методы
Для количественной оценки изменений нагрузки на коленный сустав во время фазы переноса, вызванных смещением пассивного коленного бандажа при ручном сгибании, использовали тренажер ноги с инструментами. Это было достигнуто, когда экспериментатор потянул за веревку, прикрепленную к дистальному концу коленного бандажа, чтобы создать крутящий момент сгибания. Разгибание не приводилось в действие, а достигалось за счет веса тренажера ноги с инструментами. Исследуемые типы смещений представляют собой вращение брекета вокруг вертикальной оси и смещение в переднезаднем, а также проксимально-дистальном направлении.
Исследуемые типы смещений представляют собой вращение брекета вокруг вертикальной оси и смещение в переднезаднем, а также проксимально-дистальном направлении.
Результаты
Величина смещения оказывала значительное влияние на несколько направлений нагрузки на коленный сустав в тренажере ноги с инструментами. В целом нагрузка на коленный сустав увеличивалась с увеличением смещения. В частности, более сильное ротационное смещение приводило к более высоким силам в медиолатеральном направлении в коленном суставе, а также к более высоким моментам отведения/приведения, сгибания и внутреннего/наружного вращения. Более сильное переднезаднее поступательное смещение приводило к более высоким медиолатеральным усилиям на колено, а также к более высоким моментам отведения и сгибания/разгибания. Более сильное проксимальное/дистальное поступательное смещение приводило к более высоким задним силам и силам растяжения/сжатия.
Выводы
Несоосность экзоскелета голени может увеличить внутренние силы и крутящие моменты в колене во время замаха во много раз по сравнению с тем, что наблюдается в ситуации с правильным выравниванием. Несмотря на то, что учитывается только качание, это подтверждает необходимость тщательного рассмотрения опасностей, связанных не только с поступательным, но и с вращательным смещением при разработке и использовании носимых роботов. Кроме того, это требует исследования эффектов смещения в стойке, что является целью многих приложений экзоскелета.
Несмотря на то, что учитывается только качание, это подтверждает необходимость тщательного рассмотрения опасностей, связанных не только с поступательным, но и с вращательным смещением при разработке и использовании носимых роботов. Кроме того, это требует исследования эффектов смещения в стойке, что является целью многих приложений экзоскелета.
История вопроса
Носимые роботы для физической помощи и реабилитации играют все более важную роль в нашем обществе. Старение населения увеличивает потребность в технологиях, поддерживающих людей с хронической инвалидностью, а также стареющую рабочую силу. Технические достижения, позволяющие использовать роботов в тесном взаимодействии с людьми в разных областях, могут помочь решить эту проблему [1]. Существует множество различных типов экзоскелетов, а также множество областей применения и вариантов использования.
Особенно в области реабилитационной робототехники несоосность является общей проблемой безопасности при использовании экзоскелета [2, 3]. Несоответствие между анатомическим суставом пользователя и суставом экзоскелета может вызвать нежелательные силы взаимодействия, что, в свою очередь, может снизить комфорт и безопасность [4, 5]. Можно выделить две основные причины смещения: кинематическое несоответствие между суставом экзоскелета и анатомическим суставом и неправильное расположение или подгонка экзоскелета. Кинематическое несоответствие между суставом экзоскелета и анатомическим суставом неизбежно, поскольку анатомические суставы слишком сложны по своей механике и кинематике, чтобы суставы экзоскелета могли идеально имитировать [6]. Ограниченные степени свободы (DOF) в экзоскелете могут привести к смещению во время движения. Возьмем, к примеру, коленный сустав (как один из менее сложных суставов в организме человека), его кинематика характеризуется перемещением оси вращения при увеличении сгибания колена [7]. Это поведение не воспроизводится шарнирными суставами, которые обычно используются в качестве коленного сустава экзоскелета [5].
Несоответствие между анатомическим суставом пользователя и суставом экзоскелета может вызвать нежелательные силы взаимодействия, что, в свою очередь, может снизить комфорт и безопасность [4, 5]. Можно выделить две основные причины смещения: кинематическое несоответствие между суставом экзоскелета и анатомическим суставом и неправильное расположение или подгонка экзоскелета. Кинематическое несоответствие между суставом экзоскелета и анатомическим суставом неизбежно, поскольку анатомические суставы слишком сложны по своей механике и кинематике, чтобы суставы экзоскелета могли идеально имитировать [6]. Ограниченные степени свободы (DOF) в экзоскелете могут привести к смещению во время движения. Возьмем, к примеру, коленный сустав (как один из менее сложных суставов в организме человека), его кинематика характеризуется перемещением оси вращения при увеличении сгибания колена [7]. Это поведение не воспроизводится шарнирными суставами, которые обычно используются в качестве коленного сустава экзоскелета [5]. Таким образом, микроперекосы, возникающие при сгибании колена (или движении любого другого сустава, поддерживаемого экзоскелетом), представляют собой неотъемлемую опасность. Неправильное расположение или плохое прилегание экзоскелета может привести к большему смещению, поскольку ось сустава экзоскелета может быть значительно перемещена или повернута относительно оси анатомического сустава. Поскольку современные роботизированные экзоскелетные системы, в отличие от многих ортопедических устройств, обычно являются универсальными решениями, они могут быть адаптированы к пользователю только в определенной степени, например, путем изменения длины сегмента и регулировки ремней, которые используются для крепления. устройство к конечностям пользователя. Тщательное использование этих вариантов регулировки квалифицированными экспертами имеет жизненно важное значение для сведения к минимуму несоосности. Неточная установка длины сегментов экзоскелета может вызвать проксимальное/дистальное смещение оси сустава экзоскелета по отношению к анатомическому суставу.
Таким образом, микроперекосы, возникающие при сгибании колена (или движении любого другого сустава, поддерживаемого экзоскелетом), представляют собой неотъемлемую опасность. Неправильное расположение или плохое прилегание экзоскелета может привести к большему смещению, поскольку ось сустава экзоскелета может быть значительно перемещена или повернута относительно оси анатомического сустава. Поскольку современные роботизированные экзоскелетные системы, в отличие от многих ортопедических устройств, обычно являются универсальными решениями, они могут быть адаптированы к пользователю только в определенной степени, например, путем изменения длины сегмента и регулировки ремней, которые используются для крепления. устройство к конечностям пользователя. Тщательное использование этих вариантов регулировки квалифицированными экспертами имеет жизненно важное значение для сведения к минимуму несоосности. Неточная установка длины сегментов экзоскелета может вызвать проксимальное/дистальное смещение оси сустава экзоскелета по отношению к анатомическому суставу.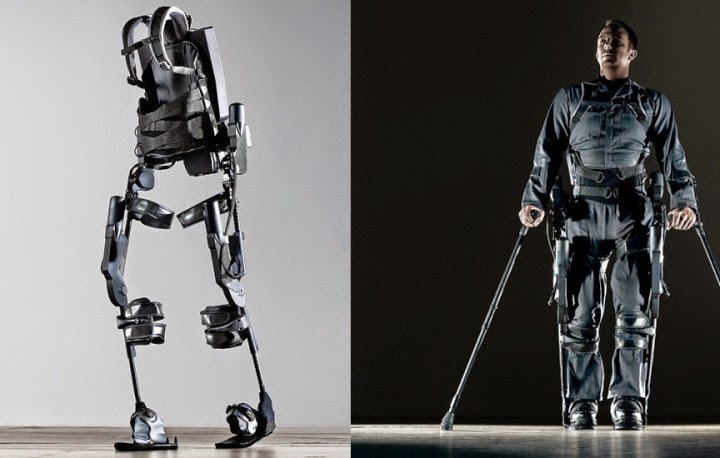 Еще одним источником неправильного позиционирования может быть (потенциально неконтролируемое) надевание системы ее пользователем. Сустав экзоскелета может быть расположен таким образом, что его ось вращения поворачивается относительно оси вращения анатомического сустава. Кроме того, отклонения в мягких тканях, одежде, надетой под экзоскелет, толщине подушки или длине ремешка могут привести к смещению оси сустава экзоскелета (в переднезаднем направлении) по отношению к оси анатомического сустава. Несоосность может привести не только к нежелательным силам и крутящим моментам в опорно-двигательной системе, но также к повышенному давлению и сдвигу в точках фиксации экзоскелета (например, в манжетах), где относительно слишком длинный или слишком короткий сегмент экзоскелета будет давить или тянуть на себя. мягкие ткани пользователя [4, 7, 8]. Несоосность ранее обсуждалась как потенциальная причина переломов костей при использовании экзоскелета нижних конечностей [9]., 10].
Еще одним источником неправильного позиционирования может быть (потенциально неконтролируемое) надевание системы ее пользователем. Сустав экзоскелета может быть расположен таким образом, что его ось вращения поворачивается относительно оси вращения анатомического сустава. Кроме того, отклонения в мягких тканях, одежде, надетой под экзоскелет, толщине подушки или длине ремешка могут привести к смещению оси сустава экзоскелета (в переднезаднем направлении) по отношению к оси анатомического сустава. Несоосность может привести не только к нежелательным силам и крутящим моментам в опорно-двигательной системе, но также к повышенному давлению и сдвигу в точках фиксации экзоскелета (например, в манжетах), где относительно слишком длинный или слишком короткий сегмент экзоскелета будет давить или тянуть на себя. мягкие ткани пользователя [4, 7, 8]. Несоосность ранее обсуждалась как потенциальная причина переломов костей при использовании экзоскелета нижних конечностей [9]., 10].
Недавние исследования были сосредоточены на разработке механизмов компенсации смещения [5, 6, 11]. Общие стратегии компенсации смещения включают ручное выравнивание, использование совместимых элементов и добавление кинематической избыточности. Ручное выравнивание может дать хорошие результаты, но требует подготовленного человека, может занять много времени и является допустимым вариантом только в том случае, если механика сустава экзоскелета очень похожа на механику анатомического сустава. Податливые элементы либо на уровне рамы и раскоса, либо на уровне соединения могут допускать небольшие компенсационные движения и тем самым уменьшать влияние небольших смещений. Другой вариант — добавить кинематическую избыточность, т. е. добавить больше степени свободы. Это, однако, часто делает устройство более тяжелым и громоздким и может привнести в систему дополнительную инерцию [5]. Литературы о влиянии несоосностей мало. В некоторых исследованиях изучалось влияние компенсационных механизмов на силы на границе кожа-манжета [12, 13], а в одном исследовании было введено смещение экзоскелета нижней конечности для изучения влияния на походку [8].
Общие стратегии компенсации смещения включают ручное выравнивание, использование совместимых элементов и добавление кинематической избыточности. Ручное выравнивание может дать хорошие результаты, но требует подготовленного человека, может занять много времени и является допустимым вариантом только в том случае, если механика сустава экзоскелета очень похожа на механику анатомического сустава. Податливые элементы либо на уровне рамы и раскоса, либо на уровне соединения могут допускать небольшие компенсационные движения и тем самым уменьшать влияние небольших смещений. Другой вариант — добавить кинематическую избыточность, т. е. добавить больше степени свободы. Это, однако, часто делает устройство более тяжелым и громоздким и может привнести в систему дополнительную инерцию [5]. Литературы о влиянии несоосностей мало. В некоторых исследованиях изучалось влияние компенсационных механизмов на силы на границе кожа-манжета [12, 13], а в одном исследовании было введено смещение экзоскелета нижней конечности для изучения влияния на походку [8]. Из-за ограниченного количества исследований в целом не хватает знаний о несоосности носимых роботов. Сюда входит отсутствующая информация о возникновении неблагоприятных событий, вызванных несоосностью, влиянии несоосности на комфорт и безопасность пользователей экзоскелета, а также о допустимых уровнях несоосности. Предполагая, что несоосность невозможно полностью предотвратить, необходимы знания о допустимых уровнях несоосности, не причиняющих значительного вреда пользователю экзоскелета. В качестве первого шага к этому знанию необходимо лучше понять механизмы смещения и его влияние на силы, действующие на тело.
Из-за ограниченного количества исследований в целом не хватает знаний о несоосности носимых роботов. Сюда входит отсутствующая информация о возникновении неблагоприятных событий, вызванных несоосностью, влиянии несоосности на комфорт и безопасность пользователей экзоскелета, а также о допустимых уровнях несоосности. Предполагая, что несоосность невозможно полностью предотвратить, необходимы знания о допустимых уровнях несоосности, не причиняющих значительного вреда пользователю экзоскелета. В качестве первого шага к этому знанию необходимо лучше понять механизмы смещения и его влияние на силы, действующие на тело.
Целью данного исследования является изучение влияния различных направлений и величин перекосов на силы и моменты в опорно-двигательном аппарате с использованием манекена конечности. Подход к использованию манекена конечности с простой механикой и легкодоступными компонентами был выбран с учетом требований разработчиков экзоскелета, которые регулярно сталкиваются с проблемами тестирования и проверки безопасности устройства. Помимо использования в настоящем исследовании, это может стать первым шагом в разработке системы, которую могут воспроизвести другие, желающие оценить влияние несоосности в своем устройстве. Мы предположили, что силы и крутящие моменты, приложенные к коленному суставу во время использования экзоскелета, выше, когда возникает смещение, по сравнению с ситуацией с правильным выравниванием. Мы исследуем влияние различных направлений смещения между коленным суставом пассивного симулятора ноги и суставом пассивного коленного бандажа, сгибаемого вручную. Исследуемые направления смещения включают ротацию вокруг вертикальной оси и трансляцию в переднезаднем, а также проксимально-дистальном направлении.
Помимо использования в настоящем исследовании, это может стать первым шагом в разработке системы, которую могут воспроизвести другие, желающие оценить влияние несоосности в своем устройстве. Мы предположили, что силы и крутящие моменты, приложенные к коленному суставу во время использования экзоскелета, выше, когда возникает смещение, по сравнению с ситуацией с правильным выравниванием. Мы исследуем влияние различных направлений смещения между коленным суставом пассивного симулятора ноги и суставом пассивного коленного бандажа, сгибаемого вручную. Исследуемые направления смещения включают ротацию вокруг вертикальной оси и трансляцию в переднезаднем, а также проксимально-дистальном направлении.
Методы
Была проведена серия экспериментов с использованием аппаратного симулятора ноги (ILS) и пассивного коленного бандажа с различными настройками выравнивания, которые экспериментатор вручную сгибал. Устройство и процедуры подробно объясняются в следующих разделах.
Аппарат
ILS был специально разработан и изготовлен для этого исследования. Он состоит из двух жестких сегментов, соединенных простым шарнирным соединением и покрытых податливым материалом, имитирующим мягкую ткань (рис. 1). Жесткая часть сегментов ноги, имитирующая кости, состоит из двух алюминиевых трубок диаметром 22 мм и толщиной стенки 2 мм. Верхний и нижний сегменты соединяются простым шарнирным соединением с центральной осью вращения (Beukenholdt zeilmakerij, Лейдердорп, Нидерланды). Для измерения влияния перекосов в отношении сил и крутящих моментов на опорно-двигательный аппарат ILS оснащен датчиком силы и крутящего момента (FT) с 6 степенями свободы (ATI FT-Delta DI60-660, ATI Industrial Automation, Apex, North Carolina, США), который соединяется с нижней частью верхнего стержня и верхней частью шарнира с помощью изготовленных на заказ деталей, напечатанных на 3D-принтере. Мягкая ткань имитируется полым цилиндром из полиэфирной пены с удельным весом (SG) 40, внутренним диаметром 25 мм и внешним диаметром 130 мм (Joan’s Comfortschuim BV, IJmuiden, Нидерланды).
Он состоит из двух жестких сегментов, соединенных простым шарнирным соединением и покрытых податливым материалом, имитирующим мягкую ткань (рис. 1). Жесткая часть сегментов ноги, имитирующая кости, состоит из двух алюминиевых трубок диаметром 22 мм и толщиной стенки 2 мм. Верхний и нижний сегменты соединяются простым шарнирным соединением с центральной осью вращения (Beukenholdt zeilmakerij, Лейдердорп, Нидерланды). Для измерения влияния перекосов в отношении сил и крутящих моментов на опорно-двигательный аппарат ILS оснащен датчиком силы и крутящего момента (FT) с 6 степенями свободы (ATI FT-Delta DI60-660, ATI Industrial Automation, Apex, North Carolina, США), который соединяется с нижней частью верхнего стержня и верхней частью шарнира с помощью изготовленных на заказ деталей, напечатанных на 3D-принтере. Мягкая ткань имитируется полым цилиндром из полиэфирной пены с удельным весом (SG) 40, внутренним диаметром 25 мм и внешним диаметром 130 мм (Joan’s Comfortschuim BV, IJmuiden, Нидерланды). К дистальному концу сегмента голени прикрепляют круглый груз. Общий вес ILS составляет 4,2 кг, а вес голени – 3,3 кг.
К дистальному концу сегмента голени прикрепляют круглый груз. Общий вес ILS составляет 4,2 кг, а вес голени – 3,3 кг.
Рис. 1
Обзор установки. Слева: схематическое изображение установки и размещения маркера, вид сбоку. ILS показан зеленым цветом, ортез — синим, рама — серо-черным, датчики — оранжевым, а маркеры — желтым. Маркеры XULM2, FTFM, AxisMed, XULMJoint, XLLMJoint, XLLM2 и LowerLegMed не показаны, поскольку они расположены на медиальной стороне. Подробную информацию о размещении маркеров можно найти в Приложении. Посередине: фотографии установки. Справа: Визуализация внутреннего ротационного смещения ( A ), заднее поступательное смещение ( B ) и дистальное поступательное смещение ( C ) ноги относительно коленного бандажа, где красная пунктирная линия и кресты обозначают центр вращения ортеза, а зеленая пунктирная линия кресты обозначают центр вращения ноги
Изображение в натуральную величину
Чтобы упростить использование экзоскелета ноги, мы использовали пассивный полужесткий коленный бандаж (A.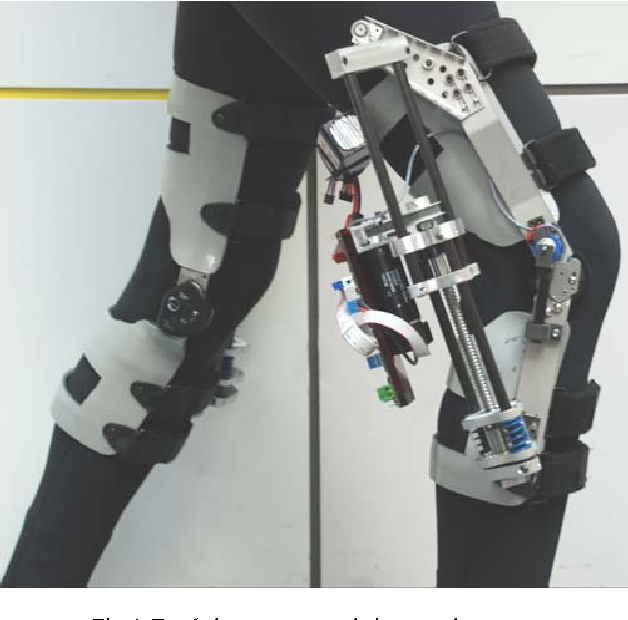 C. lite от DonJoy, DJO, LLC, Льюисвилл, Техас, США) с полицентрическим шарниром и ремнями выше и ниже колена, который обычно используется для поддержки нестабильности связок колена. Ортез можно прикрепить к ILS, а затем экспериментатор переместит его, потянув за веревку, прикрепленную к дистальному заднему ремню ортеза (см. рис. 1). Для количественной оценки силы натяжения, которая создает момент сгибания в ортезном суставе, к струне прикрепляют датчик силы натяжения (модель № 615, Tedea-Huntleigh, Чатсуорт, Калифорния, США). ILS симметрична и поэтому не имеет специфических характеристик левой или правой ноги. Однако используемый коленный бандаж предназначен для левой ноги, поэтому в этой статье ILS будет рассматриваться как тренажер для левой ноги. Верхний сегмент ортеза был закреплен на стальной раме, чтобы удерживать его на месте. Во избежание соскальзывания ИЛС из-за веса ее верхний конец также был закреплен на той же раме.
C. lite от DonJoy, DJO, LLC, Льюисвилл, Техас, США) с полицентрическим шарниром и ремнями выше и ниже колена, который обычно используется для поддержки нестабильности связок колена. Ортез можно прикрепить к ILS, а затем экспериментатор переместит его, потянув за веревку, прикрепленную к дистальному заднему ремню ортеза (см. рис. 1). Для количественной оценки силы натяжения, которая создает момент сгибания в ортезном суставе, к струне прикрепляют датчик силы натяжения (модель № 615, Tedea-Huntleigh, Чатсуорт, Калифорния, США). ILS симметрична и поэтому не имеет специфических характеристик левой или правой ноги. Однако используемый коленный бандаж предназначен для левой ноги, поэтому в этой статье ILS будет рассматриваться как тренажер для левой ноги. Верхний сегмент ортеза был закреплен на стальной раме, чтобы удерживать его на месте. Во избежание соскальзывания ИЛС из-за веса ее верхний конец также был закреплен на той же раме.
Процедура
В начале эксперимента ILS и корсет были максимально точно выровнены опытным исследователем на основе визуальной оценки. Они были расположены внутри измерительного объема оптико-электронной системы слежения на основе 8 камер (Vicon Nexus с 4 камерами Vero и 4 Vantage, VICON, Оксфорд, Великобритания). Аппарат был оснащен 33 маркерами (рис. 1; подробности о размещении маркеров можно найти в приложении), чтобы определять его сегменты и отслеживать их движение. Датчик силы растяжения был подключен к аналоговому входному каналу оптоэлектронной измерительной системы, а датчик FT с 6 степенями свободы был подключен к отдельному ПК для записи данных с помощью программного обеспечения собственной разработки. Сигнал синхронизации был захвачен обеими измерительными системами, чтобы обеспечить автономную синхронизацию.
Они были расположены внутри измерительного объема оптико-электронной системы слежения на основе 8 камер (Vicon Nexus с 4 камерами Vero и 4 Vantage, VICON, Оксфорд, Великобритания). Аппарат был оснащен 33 маркерами (рис. 1; подробности о размещении маркеров можно найти в приложении), чтобы определять его сегменты и отслеживать их движение. Датчик силы растяжения был подключен к аналоговому входному каналу оптоэлектронной измерительной системы, а датчик FT с 6 степенями свободы был подключен к отдельному ПК для записи данных с помощью программного обеспечения собственной разработки. Сигнал синхронизации был захвачен обеими измерительными системами, чтобы обеспечить автономную синхронизацию.
Настройки выравнивания были достигнуты путем ручного перемещения ILS относительно ортеза или вращения его сустава в настройке. Мы попытались достичь разной степени несоосности путем визуального осмотра. Совмещения были изменены независимо друг от друга, так что при изменении одного направления смещения два других направления оставались идеально совмещенными, насколько это было возможно на основе визуального осмотра. Точные параметры выравнивания были позже рассчитаны с использованием данных маркера для использования в анализе. Для каждой из настроек выравнивания было зарегистрировано не менее двух испытаний, каждое из которых содержало не менее 10 сгибаний колена. Экспериментатор выполнял 10 сгибаний в колене, натягивая нить, прикрепленную к дистальному концу ортеза. Удлинения не приводились в действие, а достигались за счет веса дистального сегмента ILS. Три направления смещения были:
Точные параметры выравнивания были позже рассчитаны с использованием данных маркера для использования в анализе. Для каждой из настроек выравнивания было зарегистрировано не менее двух испытаний, каждое из которых содержало не менее 10 сгибаний колена. Экспериментатор выполнял 10 сгибаний в колене, натягивая нить, прикрепленную к дистальному концу ортеза. Удлинения не приводились в действие, а достигались за счет веса дистального сегмента ILS. Три направления смещения были:
Вращательное смещение: поворот оси сгибания колена относительно оси сгибания ортеза вокруг вертикальной (z-) оси. Угол выравнивания, равный нулю, представляет идеальное выравнивание при вращении двух осей сгибания, отрицательные значения соответствуют внутреннему вращению коленного сустава ILS относительно сустава коленного бандажа, а положительные значения соответствуют внешнему вращению коленного сустава ILS относительно к суставу коленного бандажа. Мы стремились к отклонениям в диапазоне ± 20 градусов с шагом около 5 градусов.
С точки зрения ILS/пациента отрицательные значения вращательного смещения будут соответствовать внешнему вращению, а положительные значения — внутреннему вращению брекета.Трансляционное смещение в переднезаднем направлении: Горизонтальное смещение сустава ILS (в направлении x). Отрицательное расстояние выравнивания представляет собой смещение назад сустава ILS по отношению к суставу коленного бандажа, а положительное расстояние выравнивания представляет собой смещение оси сустава ILS вперед по отношению к оси коленного бандажа. Мы стремились к смещению в диапазоне ± 10 мм с шагом 10 мм. С точки зрения ILS/пациента отрицательные значения переднезаднего смещения будут соответствовать переднему, а положительные значения — заднему смещению брекета.
Поступательное смещение в проксимальном/дистальном направлении: Вертикальное смещение ILS (в направлении z).
Отрицательные значения соответствуют дистальному смещению сустава ILS относительно оси коленного бандажа, а положительные значения соответствуют смещению сустава ILS проксимально относительно оси коленного бандажа. Мы стремились к смещению в диапазоне ± 20 мм с шагом 10 мм. С точки зрения ILS/пациента отрицательные значения проксимального/дистального смещения будут соответствовать проксимальному, а положительные значения — дистальному смещению брекета.
 С точки зрения ILS/пациента отрицательные значения вращательного смещения будут соответствовать внешнему вращению, а положительные значения — внутреннему вращению брекета.
С точки зрения ILS/пациента отрицательные значения вращательного смещения будут соответствовать внешнему вращению, а положительные значения — внутреннему вращению брекета. Отрицательные значения соответствуют дистальному смещению сустава ILS относительно оси коленного бандажа, а положительные значения соответствуют смещению сустава ILS проксимально относительно оси коленного бандажа. Мы стремились к смещению в диапазоне ± 20 мм с шагом 10 мм. С точки зрения ILS/пациента отрицательные значения проксимального/дистального смещения будут соответствовать проксимальному, а положительные значения — дистальному смещению брекета.
Отрицательные значения соответствуют дистальному смещению сустава ILS относительно оси коленного бандажа, а положительные значения соответствуют смещению сустава ILS проксимально относительно оси коленного бандажа. Мы стремились к смещению в диапазоне ± 20 мм с шагом 10 мм. С точки зрения ILS/пациента отрицательные значения проксимального/дистального смещения будут соответствовать проксимальному, а положительные значения — дистальному смещению брекета. Для единообразия, начиная с этого момента, при использовании терминов внутренняя/наружная ротация, переднее/заднее перемещение и проксимальное/дистальное перемещение мы ссылаемся на перспективу устройства. Таким образом, внутренняя ротация означает, что колено ILS повернуто внутрь по отношению к бандажному суставу, переднее смещение означает, что колено ILS сдвинуто вперед по отношению к бандажному суставу, а проксимальное смещение означает, что колено ILS расположено выше. чем брекет-сустав.
Мы повторили испытания на смещение при вращении с двумя настройками давления ремня расчалки, чтобы выяснить, влияет ли это на результаты измерения силы и крутящего момента. Поскольку мы не могли измерить давление лямок в текущей настройке, мы могли сгруппировать только по «натянутым лямкам» и «ослабленным лямкам». В положении «натянутые ремни» ремни нижнего сегмента ортеза были туго натянуты, так что пена была сжата, в то время как в положении «ослабленные ремни» ремни были закрыты без видимого сжатия пены при полностью растянутом ILS. Это дополнительное условие было проверено только в экспериментах по ротационному смещению, поскольку, в отличие от поступательного смещения, регулировка вращательного смещения не требовала повторного прикрепления ремней. Таким образом, две разные настройки применимы только в сеансе сдвига вращения. Верхние лямки ортеза оставались примерно при одинаковом давлении лямок в течение всего эксперимента. Для калибровки были записаны два статических испытания, в которых нижняя часть ILS свободно висела без прикрепленного ортеза и без выполнения каких-либо движений.
Обработка и анализ данных
Данные маркера были обработаны и маркированы в Vicon Nexus 2.9.2 с использованием пользовательской кинематической модели, а затем экспортированы для дальнейшего анализа в Python 3.7.4. Все данные (данные маркера, данные датчика FT, данные датчика силы растяжения) были отфильтрованы с использованием низкочастотного двунаправленного фильтра Баттерворта 4-го порядка с частотой среза 6 Гц. Мы использовали ориентацию сегментов для расчета углов сгибания ILS и ортеза, а также ротационного выравнивания, как определено выше. Мы сделали это, вычислив матрицы вращения нижних сегментов в локальных системах координат верхних сегментов и матрицы вращения сегментов ILS в локальных системах координат сегментов ортеза соответственно и вычислив углы Эйлера. Поступательное выравнивание в направлениях x и z (т. е. переднезаднее и проксимально-дистальное выравнивание) рассчитывали как расстояние от центра коленного сустава ILS (средняя точка маркеров AxisMed и AxisLat) от центра сустава ортеза (средняя точка маркеров XULMJoint, XULLJoint, XLLMJoint и XLLLJoint). Чтобы получить одно значение выравнивания для каждой попытки и типа смещения, мы взяли среднее значение рассматриваемого параметра выравнивания в статической ситуации до первого сгибания колена (т. е. от начала испытания до точки, где угол сгибания ILS увеличивается до более более 120% от исходного угла сгибания ILS).
Чтобы получить одно значение выравнивания для каждой попытки и типа смещения, мы взяли среднее значение рассматриваемого параметра выравнивания в статической ситуации до первого сгибания колена (т. е. от начала испытания до точки, где угол сгибания ILS увеличивается до более более 120% от исходного угла сгибания ILS).
Данные датчика FT были скорректированы путем вычитания значений смещения, полученных из записей калибровки. Значения смещения были получены путем вычисления среднего значения записей датчика FT из одного из калибровочных испытаний, а затем вычитания веса голени из значения Fz. Значения смещения были вычтены из данных датчика FT для всего временного ряда каждого испытания перед какой-либо дальнейшей обработкой. Силы и крутящие моменты в месте соединения ILS рассчитывались на основе зарегистрированных сил и крутящих моментов в месте расположения датчика FT и расстояния между началом системы отсчета датчика FT и датчиком соединения ILS. Предполагая, что часть установки между суставом ILS и датчиком FT является жесткой, мы использовали среднее значение вертикального расстояния (направление z) в статической ситуации до первого сгибания, аналогично расчетам выравнивания. Далее мы предположили, что расстояние в направлениях x и y равно нулю из-за конструкции ILS. В результате были получены следующие формулы:
Далее мы предположили, что расстояние в направлениях x и y равно нулю из-за конструкции ILS. В результате были получены следующие формулы:
$$\begin{aligned}&{F{x}_{соединение}=F{x}_{датчик}+ \frac{M{y}_{датчик}}{Dz}}\\ &{F {y}_{соединение}=F{y}_{датчик}- \frac{M{x}_{датчик}}{Dz}}\\ &{F{z}_{соединение}=F{z} _{датчик}}\end{выровнено}$$
$$\begin{выровнено}&{M{x}_{совместное}=M{x}_{сенсор}+Dz F{y}_{сенсор} } \\ &{M{y}_{соединение}=M{y}_{датчик}- Dz F{x}_{датчик}} \\ &{M{z}_{соединение}=M{z} _{датчик}}\end{выровнено}$$
где \(F{x}_{датчик}\), \(F{y}_{датчик}\) и \(F{z}_{датчик }\) — силы, измеренные датчиком FT, \(M{x}_{датчик}\), \(M{y}_{датчик}\) и \(M{z}_{датчик}\) — крутящие моменты, измеренные датчиком FT, а \(Dz\) — расстояние по вертикали между центром соединения ILS и началом системы отсчета датчика FT. \(Dz\) имеет отрицательное значение, так как центр сустава ILS расположен ниже датчика FT (рис. 2). Для удобства чтения \(F{x}_{соединение}\), \(F{y}_{соединение}\) и \(F{z}_{соединение}\) будут обозначаться как Fx, Fy и Fz и \(M{x}_{соединение}\), \(M{y}_{соединение}\) и \(M{z}_{соединение}\) будем обозначать как Mx, My и Mz .
Рис. 2
Схематическое изображение установки и измерений, использованных для расчета сил и крутящих моментов в месте расположения сустава, а также крутящего момента, создаваемого тяговым усилием
Изображение в натуральную величину
Момент сгибания в ортезном суставе
$$\tau =r\,\mathrm{cos}\,\varphi\, F$$
, где \(r\) — расстояние между центр сустава ортеза (середина маркеров XULLJoint, XULMJoint, XLLLJoint и XLLMJoint) и начало нижнего сегмента ортеза (середина маркеров XLLL2 и XLLM2), F — сила, измеренная датчиком силы растяжения, а \(\varphi\) — угол между вектором фактической силы растяжения и вектором силы F’ , действующим перпендикулярно нижнему сегменту ортеза. Он рассчитывается как угол между вектором по оси z нижнего сегмента ортеза и вектором силы растягивающей силы (т. е. вектор от маркера XLLRopeAttachment до средней точки между всеми четырьмя маркерами 1D_ForceSensor), спроецированный на плоскость x–z, минус 90 градусов (рис. 2).
2).
Для сравнения между испытаниями мы извлекли пиковые силы (Fx пик , Fy пик , Fz пик ) и крутящие моменты (Mx пик , My пик , Mz пик ) на повторение сгибания /расширенный цикл для каждого из испытаний. Это было достигнуто путем обнаружения пиков момента сгибания, затем разделения данных на полпути между этими пиками и определения индекса максимального абсолютного отклонения от начального значения для компонента силы/крутящего момента и среза. Затем совместное усилие и крутящий момент ILS для этих индексов были извлечены как пиковые усилия/крутящие моменты для повторения и испытания. Позднее были рассчитаны средние значения и стандартные отклонения всех пиков за испытание, чтобы обеспечить лучший обзор. Кроме того, были извлечены пиковые моменты сгибания в ортезном суставе и пиковые углы сгибания ILS за одно повторение.
Взаимосвязь между следующими параметрами была проанализирована статистически с использованием регрессионного анализа:
Несоосность и пиковые силы/моменты в соединении ILS
пиковый угол сгибания ILS и смещения
Несоосность и пиковый момент сгибания вручную
Для анализа смещений и пиковых сил/моментов в суставе ILS мы провели как регрессионный анализ только абсолютных значений для оценки взаимосвязи между абсолютным смещением и абсолютной нагрузкой на сустав, так и регрессионный анализ исходных значений, чтобы также учесть направление смещения, а также силы/моменты во внимание.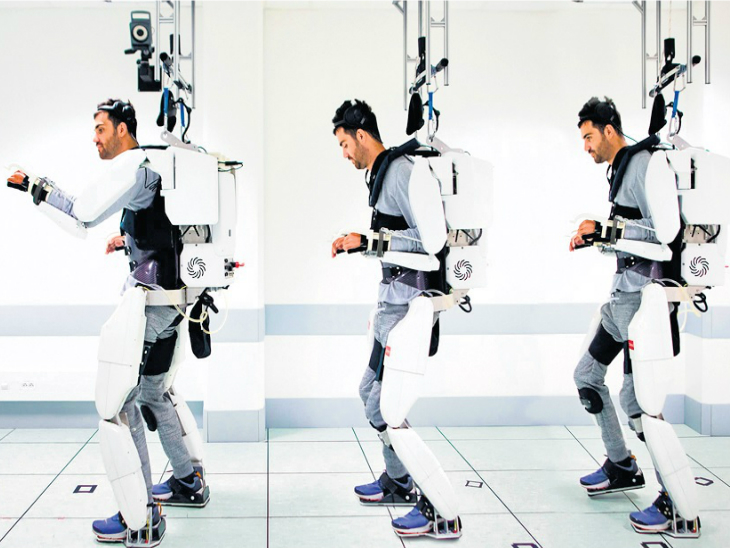 Линии регрессии со значениями R-квадрата больше 0,7 регистрируются и считаются сильными отношениями. Если линейная регрессия, достигающая этого целевого значения, не была обнаружена, выполнялся полиномиальный регрессионный анализ 2-й степени с тем же целевым значением R-квадрата. Мы использовали уровень значимости 0,05 для вероятности F-статистики.
Линии регрессии со значениями R-квадрата больше 0,7 регистрируются и считаются сильными отношениями. Если линейная регрессия, достигающая этого целевого значения, не была обнаружена, выполнялся полиномиальный регрессионный анализ 2-й степени с тем же целевым значением R-квадрата. Мы использовали уровень значимости 0,05 для вероятности F-статистики.
Результаты
Мы записали и проанализировали 22 испытания ротационного смещения в диапазоне от 13 градусов внутренней ротации до 19 градусов наружной ротации, 6 переднезадних поступательных испытаний в диапазоне от 4 мм кзади до 14 мм кпереди смещения центра сустава ILS и 12 проксимальных/дистальных поступательное смещение в диапазоне от 23 мм дистального смещения до 12 мм проксимального смещения суставного центра ILS. Обратите внимание, что в анализе ротационного смещения и переднезаднего поступательного смещения использовались два параллельных испытания (отмечены в таблицах 2 и 4).
На рисунке 3 показано типичное испытание в положении на одной линии, в котором десять повторений сгибания и разгибания четко видны из данных крутящего момента сгибания и угла сустава ILS.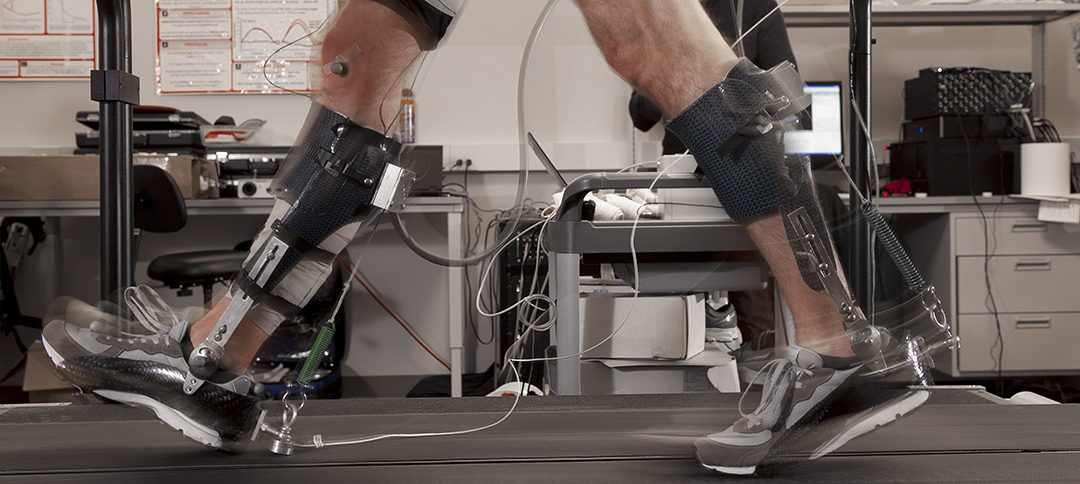 Как и ожидалось, в то время как все крутящие моменты, а также силы в направлениях y и z остаются близкими к нулю на протяжении всего испытания, наблюдается явное увеличение силы в отрицательном направлении x (т. ИЛС сгибание.
Как и ожидалось, в то время как все крутящие моменты, а также силы в направлениях y и z остаются близкими к нулю на протяжении всего испытания, наблюдается явное увеличение силы в отрицательном направлении x (т. ИЛС сгибание.
Рис. 3
Угол сустава ILS, крутящий момент при сгибании, усилия и крутящие моменты в суставах в ходе типичного испытания в выровненной посадке. На верхнем графике показан угол сгибания ILS, где 0 градусов соответствует полному разгибанию (черный цвет), а момент сгибания, создаваемый тянущей силой, приложенной к ортезу (красный цвет). На среднем графике показаны силы в суставе ILS, где положительное значение Fx представляет собой силу, направленную вперед, положительное значение Fy направлено от медиального направления к латеральному, а положительное значение Fz представляет собой сжимающую силу. На нижнем графике показаны крутящие моменты в суставе ILS, где положительный Mx представляет собой момент приведения, положительный My представляет собой момент сгибания, а положительный Mz представляет собой момент внешнего вращения. См. также рис. 2 для ориентации оси
См. также рис. 2 для ориентации оси
Изображение полного размера
Влияние несоосности на объединенные силы и моменты
Результаты воздействия всех трех исследованных направлений несоосности представлены в следующих разделах.
Вращательное смещение
При большей степени вращательного смещения более высокие абсолютные пиковые силы и крутящие моменты наблюдались для Fy, Mx, My и Mz, если смотреть только на величину смещения, независимо от направления смещения (таблица 1). При рассмотрении более подробной картины, включая направление смещения, мы также можем видеть, что смещение вращения явно влияет на совместные силы в направлениях x и y (рис. 4). Пики в отрицательном направлении x вокруг максимального сгибания увеличиваются по величине с увеличением ротационных смещений в обоих направлениях. Виден гистерезис с близким к линейному нарастанию силы, которая затем быстро сбрасывается, при этом большая часть уменьшения силы происходит до разгибания сустава ILS. Сила соединения в направлении y увеличивается с увеличением угла соединения при внешнем смещении вращения и уменьшается с увеличением угла соединения при внутреннем смещении вращения. Как упоминалось выше, абсолютные пики увеличиваются с увеличением величины смещения в обоих направлениях. Характер совместной силы в направлении z варьируется в зависимости от испытания, и пики не показывают четкой связи с несоосностью.
Сила соединения в направлении y увеличивается с увеличением угла соединения при внешнем смещении вращения и уменьшается с увеличением угла соединения при внутреннем смещении вращения. Как упоминалось выше, абсолютные пики увеличиваются с увеличением величины смещения в обоих направлениях. Характер совместной силы в направлении z варьируется в зависимости от испытания, и пики не показывают четкой связи с несоосностью.
Таблица 1 Результаты регрессионного анализа для абсолютных значений смещения и совместных сил/крутящих моментов
Полноразмерная таблица
Рис. 4
Графики гистерезиса совместных усилий и крутящих моментов ILS в зависимости от угла сгибания ILS. Величина смещения вращения (rot. MA) представлена цветами графика с более темными синими оттенками, представляющими более сильное внутреннее вращение, и более темными красными оттенками, представляющими более сильное внешнее вращение. направлении с увеличением угла шарнира, когда имеет место несоосность при внешнем вращении, и увеличение в отрицательном направлении при увеличении угла шарнира, когда имеет место несоосность при внутреннем вращении. Совместные крутящие моменты вокруг оси Z показывают аналогичную картину в противоположном направлении. Крутящие моменты вокруг оси Y имеют пики при максимальном сгибании, которые сильно возрастают с увеличением степени смещения в обоих направлениях. Испытания с большим смещением показывают более резкое увеличение усилий в суставах (кроме направления z) и крутящих моментов с увеличением угла сгибания. В частности, испытания с большими смещениями показывают очень сильный гистерезис; после устойчивого нарастания силы или крутящего момента происходит внезапное падение при максимальном сгибании. 9{2} = 0,92; \, р < 0,01} \справа)\).
Совместные крутящие моменты вокруг оси Z показывают аналогичную картину в противоположном направлении. Крутящие моменты вокруг оси Y имеют пики при максимальном сгибании, которые сильно возрастают с увеличением степени смещения в обоих направлениях. Испытания с большим смещением показывают более резкое увеличение усилий в суставах (кроме направления z) и крутящих моментов с увеличением угла сгибания. В частности, испытания с большими смещениями показывают очень сильный гистерезис; после устойчивого нарастания силы или крутящего момента происходит внезапное падение при максимальном сгибании. 9{2} = 0,92; \, р < 0,01} \справа)\).
Таблица 2. Пиковые силы и крутящие моменты, представленные как M (SD) для испытания на смещение при вращении
Полноразмерная таблица
Влияние давления лямки
В имеющихся данных различные уровни давления лямки не влияли на ILS совместные пиковые силы и крутящие моменты. Регрессия для объединенных данных (плотные и свободные ремни) объясняла, по крайней мере, ту же долю дисперсии, что и наименее эффективная регрессия двух подмножеств данных (таблица 3).
Таблица 3. Результаты регрессионного анализа для тугих лямок, ослабленных лямок и объединенных двух условий
Полноразмерная таблица
Трансляционное смещение в переднезаднем направлении
Поскольку текущая установка не позволяет легко перемещать ортез только в переднезаднем направлении, могут быть достигнуты три различных уровня переднезаднего выравнивания (см. Таблицу 4, обратите внимание, что каждый параметр смещения измерялся дважды, и есть небольшие различия в измеренной величине смещения в этих двух повторениях на каждый параметр). При большей степени переднезаднего смещения более высокие абсолютные пиковые силы и крутящие моменты наблюдались для Fx (полиномиальное соответствие 2-й степени) и Mx (линейное соответствие), если рассматривать только величину смещения, независимо от направления смещения (таблица 1). При рассмотрении более подробной картины, включая направление смещения, эта картина подтверждается в Fx, демонстрируя более высокую абсолютную пиковую силу и более сильный гистерезис с большим смещением (рис. 5). Fy в целом низкий, остается почти постоянным по всему кругу сгибания/разгибания и немного различается по начальным значениям в различных условиях. На начальные значения Fz несоосность влияет противоположным образом, чем на значения Fy. Формы кривых четко различаются при различных настройках выравнивания, демонстрируя положительный пик при максимальном сгибании в положении заднего переноса, положительный пик при максимальном разгибании и отрицательный пик примерно на половине максимального сгибания в положении переднего перемещения. Mx показывает лишь небольшую вариацию в настройках выровненного и заднего перемещения и уменьшение с увеличением сгибания в настройках переднего перемещения. Видна тенденция к положительным пикам заднего смещения смещения и отрицательным пикам переднего смещения смещения. My и Mz демонстрируют сопоставимое поведение во всех настройках, охватывающих небольшой диапазон крутящего момента.
5). Fy в целом низкий, остается почти постоянным по всему кругу сгибания/разгибания и немного различается по начальным значениям в различных условиях. На начальные значения Fz несоосность влияет противоположным образом, чем на значения Fy. Формы кривых четко различаются при различных настройках выравнивания, демонстрируя положительный пик при максимальном сгибании в положении заднего переноса, положительный пик при максимальном разгибании и отрицательный пик примерно на половине максимального сгибания в положении переднего перемещения. Mx показывает лишь небольшую вариацию в настройках выровненного и заднего перемещения и уменьшение с увеличением сгибания в настройках переднего перемещения. Видна тенденция к положительным пикам заднего смещения смещения и отрицательным пикам переднего смещения смещения. My и Mz демонстрируют сопоставимое поведение во всех настройках, охватывающих небольшой диапазон крутящего момента.
Таблица 4 Пиковые силы и крутящие моменты, представленные в виде M (SD) для испытания на переднезаднее поступательное смещение
Полноразмерная таблица
Рис. 5
5
Графики гистерезиса сил и крутящих моментов в суставах ILS в зависимости от угла сгибания ILS. Величина переднезаднего поступательного смещения (трансл. MA) представлена цветами графика с зелено-синими оттенками, представляющими заднее смещение, и оранжево-красными оттенками, представляющими переднее смещение
Полноразмерное изображение 9{2}=0,88; р<0,01\)).
Поступательное смещение в проксимальном/дистальном направлении
Для проксимального/дистального поступательного смещения не было обнаружено взаимосвязи (с R 2 > 0,7) между величиной смещения и абсолютными пиковыми усилиями или моментами в суставах, если рассматривать только величину смещения , независимо от направления несоосности (табл. 1). При рассмотрении совместных усилий и крутящих моментов ILS в цикле сгибания/разгибания при всех параметрах проксимального/дистального поступательного смещения (рис. 6) наблюдается более детальная картина. Fx показывает увеличение абсолютной пиковой силы и гистерезиса с большими смещениями, в то время как Fy показывает небольшое изменение в цикле сгибания/разгибания, но небольшое отклонение в начальных значениях. Начальные значения и форма кривых Fz варьируются в зависимости от испытания с тенденцией к более выраженным отрицательным пикам и гистерезису в испытаниях с проксимальным перемещением. Торки в суставах мало различаются между испытаниями, за исключением двух испытаний с дистальным смещением приблизительно на 12 мм, показывающих более высокие положительные пики во всех направлениях, в направлении Y вместе с испытаниями с самым сильным дистальным смещением (примерно 22 мм).
Начальные значения и форма кривых Fz варьируются в зависимости от испытания с тенденцией к более выраженным отрицательным пикам и гистерезису в испытаниях с проксимальным перемещением. Торки в суставах мало различаются между испытаниями, за исключением двух испытаний с дистальным смещением приблизительно на 12 мм, показывающих более высокие положительные пики во всех направлениях, в направлении Y вместе с испытаниями с самым сильным дистальным смещением (примерно 22 мм).
Рис. 6
Графики гистерезиса сил и крутящих моментов в суставах ILS в зависимости от угла сгибания ILS. Величина проксимального/дистального поступательного смещения (трансл. MA) представлена цветами графика с зелено-синими оттенками, представляющими дистальное смещение, и оранжево-красными оттенками, представляющими проксимальное смещение
Полноразмерное изображение
Несмотря на отсутствие связи между величина несоосности и пиковые усилия/моменты, если принять во внимание направление несоосности, соотношение становится очевидным. {2}+ 0.81 Выравнивание{t}_{transPD}-9{2}=0,76;р<0,01\)).
{2}+ 0.81 Выравнивание{t}_{transPD}-9{2}=0,76;р<0,01\)).
Таблица 5 Пиковые силы и крутящие моменты, представленные в виде M (SD) для испытания проксимального/дистального поступательного смещения
Полноразмерная таблица
Изменение смещения во время сгибания
сгибание и разгибание установки ILS и ортеза, это поведение показано на рис. 7 для всех трех типов смещения. Величина смещения меньше при максимальном сгибании, чем при максимальном разгибании. При проксимально-дистальном поступательном смещении количество повторений цикла сгибания/разгибания практически не меняется, а в некоторых исследованиях показано более дистальное положение сустава ILS при максимальном сгибании. В дополнение к этому, особенно при более сильном ротационном смещении и самом сильном переднем трансляционном смещении, можно наблюдать уменьшение смещения в первом цикле сгибания/разгибания.
Рис. 7
Поведение смещения во время циклов сгибания/разгибания в каждом испытании. Величина несоосности (вращ. / трансл. MA) представлена цветами графика, а начальное значение каждой настройки смещения отмечено кружком. Оттенки от зеленого до синего представляют внутреннее вращение, смещение кзади и дистальное смещение соответственно (слева направо), а оранжево-красные оттенки представляют внешнее вращение, смещение кпереди и проксимальное смещение соответственно
Величина несоосности (вращ. / трансл. MA) представлена цветами графика, а начальное значение каждой настройки смещения отмечено кружком. Оттенки от зеленого до синего представляют внутреннее вращение, смещение кзади и дистальное смещение соответственно (слева направо), а оранжево-красные оттенки представляют внешнее вращение, смещение кпереди и проксимальное смещение соответственно
Полноразмерное изображение
Влияние смещения на прилагаемый вручную момент сгибания и максимальный угол сгибания
Введенный момент сгибания в ортезном суставе по углу сгибания ILS при всех настройках смещения показан на рис. 8. В настройках поступательного смещения , нет видимого влияния смещения на требуемый момент сгибания. График ротационного смещения показывает тенденцию к увеличению максимального крутящего момента и/или уменьшению максимального угла сгибания в условиях с большими смещениями. Регрессионный анализ не выявил связи между величиной смещения и максимальным крутящим моментом, но выявил связь уменьшения максимального угла сгибания с увеличением ротационного смещения, что, однако, не соответствует критерию R 9. {2}=0,62;р<0,01\)).
{2}=0,62;р<0,01\)).
Рис. 8
Поведение момента сгибания в циклах сгибания/разгибания в каждом испытании. Величина смещения (поворот/перевод MA) представлена цветами графика. Оттенки от зеленого до синего представляют внутреннее вращение, смещение кзади и дистальное смещение соответственно (слева направо), а оранжево-красные оттенки представляют внешнее вращение, смещение кпереди и смещение в проксимальном направлении соответственно
Полноразмерное изображение
Обсуждение
В этой статье мы имитировали использование экзоскелета и проанализировали влияние различных величин и направлений смещения с помощью ILS и пассивного коленного бандажа, который приводился в действие вручную, выявив возрастающую нагрузку на сустав с увеличением смещения, что подтверждает нашу гипотезу. . В частности, увеличение ротационного смещения вокруг вертикальной оси привело к более высоким абсолютным силам в медиолатеральном (y-) направлении, а также к более высоким абсолютным крутящим моментам вокруг всех трех осей. Статистический анализ поступательных смещений и результирующих совместных сил и крутящих моментов дал другие результаты при тестировании только абсолютных значений, чем анализ значений с учетом направлений смещения и нагрузки. Это указывает на то, что воздействие на совместные силы и нагрузки несимметрично при поступательном смещении, в отличие от вращательного смещения, где оба анализа привели к одним и тем же отношениям. Принимая во внимание только абсолютные значения, повышенное переднезаднее поступательное смещение приводит к увеличению абсолютных пиковых сил в переднезаднем направлении и увеличению абсолютных пиковых моментов отведения/приведения. Принимая во внимание направления смещения и нагрузки, увеличение поступательного смещения в переднезаднем направлении приводило к более высоким абсолютным пиковым силам в медиолатеральном направлении, а также к более высоким моментам отведения/приведения и сгибания/разгибания. Увеличение поступательного смещения в проксимально-дистальном направлении привело к более высоким абсолютным силам в передне-заднем и вертикальном направлениях при рассмотрении направлений смещения и сил/моментов, даже несмотря на то, что не существовало взаимосвязей только в отношении абсолютных значений.
Статистический анализ поступательных смещений и результирующих совместных сил и крутящих моментов дал другие результаты при тестировании только абсолютных значений, чем анализ значений с учетом направлений смещения и нагрузки. Это указывает на то, что воздействие на совместные силы и нагрузки несимметрично при поступательном смещении, в отличие от вращательного смещения, где оба анализа привели к одним и тем же отношениям. Принимая во внимание только абсолютные значения, повышенное переднезаднее поступательное смещение приводит к увеличению абсолютных пиковых сил в переднезаднем направлении и увеличению абсолютных пиковых моментов отведения/приведения. Принимая во внимание направления смещения и нагрузки, увеличение поступательного смещения в переднезаднем направлении приводило к более высоким абсолютным пиковым силам в медиолатеральном направлении, а также к более высоким моментам отведения/приведения и сгибания/разгибания. Увеличение поступательного смещения в проксимально-дистальном направлении привело к более высоким абсолютным силам в передне-заднем и вертикальном направлениях при рассмотрении направлений смещения и сил/моментов, даже несмотря на то, что не существовало взаимосвязей только в отношении абсолютных значений.
Насколько нам известно, это первое исследование, показывающее относительное влияние различных направлений и величин смещения на нагрузки на суставы. Предыдущие исследования с использованием аналогичных наколенников выявили повышенные силы в шарнире бандажа [14], но не выявили существенных различий в кинематике [15] при поступательном смещении. В этих исследованиях брекеты носили люди и не приводили в действие какие-либо внешние силы. Исследование на трупах показало, что в то время как хорошо выровненный ортез снижал нагрузку на переднюю крестообразную связку, смещенная ситуация показала повышенную нагрузку по сравнению с нефиксированным коленом [16]. Несмотря на разницу в исследовательском вопросе и подходе, в настоящем исследовании с использованием этого пассивного коленного бандажа для имитации экзоскелета с электроприводом результаты исследования трупа совпадают с нашими результатами увеличения нагрузки на сустав с увеличением смещения.
Среди испытаний на ротационное смещение средняя абсолютная пиковая сила в переднезаднем (x-) направлении была самой высокой в испытании с наружной ротацией сустава ILS на 16,1 градуса и была в 0,7 раза или на 90,5 Н выше, чем средняя абсолютная пиковая сила в закрытом положении. до оптимального выравнивания (внутреннее вращение на 0,1 градуса). В том же испытании были получены самые высокие средние абсолютные пиковые крутящие моменты во всех трех направлениях, при этом пик Mx (абдоминальное положение/приведение) был на 3,8 Нм или в 377 раз выше, пик My (сгибание/разгибание) составлял 4,44 Нм или в 44 раза выше, а пик Mz ( вращение внутрь/наружу), что составляет 3 Нм или в 12,5 раз больше, чем в совмещенном испытании. Средняя абсолютная пиковая сила в медиолатеральном (y-) направлении была самой высокой в испытании с самым сильным внутренним вращением (12,9).град) и был в 415 раз или на 41,5 Н выше, чем в выровненных условиях. Ни один из самых высоких зарегистрированных пиковых усилий или крутящих моментов не был связан с испытанием с самым сильным внешним вращением (18,6 градуса). Хотя это противоречит здравому смыслу, это может быть связано с уменьшением смещения при первом сгибании в этом испытании, что привело к более низкому эффективному смещению, сравнимому со следующим испытанием, которое было испытанием с самыми высокими пиковыми значениями Fx, Mx, My и Mz.
до оптимального выравнивания (внутреннее вращение на 0,1 градуса). В том же испытании были получены самые высокие средние абсолютные пиковые крутящие моменты во всех трех направлениях, при этом пик Mx (абдоминальное положение/приведение) был на 3,8 Нм или в 377 раз выше, пик My (сгибание/разгибание) составлял 4,44 Нм или в 44 раза выше, а пик Mz ( вращение внутрь/наружу), что составляет 3 Нм или в 12,5 раз больше, чем в совмещенном испытании. Средняя абсолютная пиковая сила в медиолатеральном (y-) направлении была самой высокой в испытании с самым сильным внутренним вращением (12,9).град) и был в 415 раз или на 41,5 Н выше, чем в выровненных условиях. Ни один из самых высоких зарегистрированных пиковых усилий или крутящих моментов не был связан с испытанием с самым сильным внешним вращением (18,6 градуса). Хотя это противоречит здравому смыслу, это может быть связано с уменьшением смещения при первом сгибании в этом испытании, что привело к более низкому эффективному смещению, сравнимому со следующим испытанием, которое было испытанием с самыми высокими пиковыми значениями Fx, Mx, My и Mz. Примечательно, что самая низкая средняя абсолютная пиковая сила в переднезаднем (x-) направлении наблюдалась в испытании с наружным вращением на 1,8 градуса, а не в испытании с наиболее точным выравниванием (M (SD) 77,1 Н (12,1 Н), что составляло примерно 20 N выше, чем при лучшем выравнивании вращения). Это может быть связано с тем, что струна, используемая для приложения сгибающего момента к ортезу, разорвалась в конце предыдущего испытания, что, в свою очередь, привело к изменению переднезаднего смещения (0,7 мм сдвига кзади, в то время как среднее значение по всем испытаниям ротационного смещения было 3,5 мм (SD 1,3 мм) переднего смещения. Более того, максимальные абсолютные средние пиковые силы и крутящие моменты не наблюдались в испытаниях с самыми сильными смещениями, что может указывать на насыщение максимальных сил и крутящих моментов при очень больших смещениях. Это может быть подтверждено тестированием большего диапазона несоосностей.
Примечательно, что самая низкая средняя абсолютная пиковая сила в переднезаднем (x-) направлении наблюдалась в испытании с наружным вращением на 1,8 градуса, а не в испытании с наиболее точным выравниванием (M (SD) 77,1 Н (12,1 Н), что составляло примерно 20 N выше, чем при лучшем выравнивании вращения). Это может быть связано с тем, что струна, используемая для приложения сгибающего момента к ортезу, разорвалась в конце предыдущего испытания, что, в свою очередь, привело к изменению переднезаднего смещения (0,7 мм сдвига кзади, в то время как среднее значение по всем испытаниям ротационного смещения было 3,5 мм (SD 1,3 мм) переднего смещения. Более того, максимальные абсолютные средние пиковые силы и крутящие моменты не наблюдались в испытаниях с самыми сильными смещениями, что может указывать на насыщение максимальных сил и крутящих моментов при очень больших смещениях. Это может быть подтверждено тестированием большего диапазона несоосностей.
Что касается переднезаднего поступательного смещения, диапазоны наблюдаемых средних пиковых усилий и крутящих моментов были значительно ниже, чем наблюдаемые при ротационном смещении. Точно так же наблюдаемые различия в средних абсолютных пиковых усилиях в поперечной плоскости (в направлениях x и y) были ниже, чем наблюдаемые при ротационном смещении. Как абсолютный пик Fx, так и пик абсолютного Fy были самыми высокими в испытании с передним перемещением сустава ILS на 11,5 мм и самым низким при переднем перемещении 3,92 мм с разницей в 41,8 Н и 4,6 Н соответственно (что в 0,4 раза и 0,8 раза соответственно выше, чем в самая низкая наблюдаемая средняя абсолютная пиковая сила). Максимальный и минимальный средние абсолютные пиковые моменты отведения/приведения и сгибания/разгибания варьировались только на 0,64 Нм и 0,24 Нм соответственно.
Точно так же наблюдаемые различия в средних абсолютных пиковых усилиях в поперечной плоскости (в направлениях x и y) были ниже, чем наблюдаемые при ротационном смещении. Как абсолютный пик Fx, так и пик абсолютного Fy были самыми высокими в испытании с передним перемещением сустава ILS на 11,5 мм и самым низким при переднем перемещении 3,92 мм с разницей в 41,8 Н и 4,6 Н соответственно (что в 0,4 раза и 0,8 раза соответственно выше, чем в самая низкая наблюдаемая средняя абсолютная пиковая сила). Максимальный и минимальный средние абсолютные пиковые моменты отведения/приведения и сгибания/разгибания варьировались только на 0,64 Нм и 0,24 Нм соответственно.
При проксимально-дистальном поступательном смещении диапазоны сил и крутящих моментов были сопоставимы с таковыми при переднезаднем поступательном смещении. Наблюдаемые различия в максимальных и минимальных средних абсолютных пиковых усилиях в переднезаднем (х-) направлении также были сопоставимы с теми, которые наблюдались в испытаниях на переднезаднее поступательное смещение с 48,3 Н (в 0,5 раза выше при дистальном перемещении 22,1 мм, чем самые низкие значения, наблюдаемые при 4,8 Н). мм проксимального перевода). Средние абсолютные пиковые силы в направлении z варьировались на 49.7 N, при этом результат при проксимальном переводе 11,1 мм в 111 раз выше, чем при дистальном переводе 3,1 мм.
мм проксимального перевода). Средние абсолютные пиковые силы в направлении z варьировались на 49.7 N, при этом результат при проксимальном переводе 11,1 мм в 111 раз выше, чем при дистальном переводе 3,1 мм.
В целом, мы наблюдали гораздо более высокие пиковые силы в медиолатеральном направлении, а также крутящие моменты во всех трех плоскостях при настройках ротационного смещения, чем при настройках поступательного смещения. Хотя невозможно связать определенную степень ротационного смещения с поступательным смещением, мы заметили, что ротационное смещение примерно на 10 градусов приводило к гораздо более высоким пиковым усилиям в медиолатеральном направлении и пиковым крутящим моментам во всех плоскостях, чем поступательное смещение на 10 мм в любом направлении. Пиковые силы в переднезаднем направлении показали одинаковое увеличение при всех типах смещения. Кроме того, R 2 -значения, в частности, в регрессии вращательного смещения по сравнению с совместными усилиями и крутящими моментами, были очень высокими со значениями, равными или превышающими 0,9, что указывает на то, что большая часть вариации результатов ILS по силе и крутящему моменту в суставах может быть объяснена различиями в смещение. В то время как клиницисты неофициально сообщают о проксимальном/дистальном поступательном смещении как о самой большой проблеме на практике при использовании экзоскелетов нижних конечностей, результаты этого исследования показывают, что ротационное смещение также может вызывать существенное увеличение сил и крутящих моментов и что этими эффектами нельзя пренебрегать. Поскольку такие ротационные смещения могут быть вызваны на практике неточным позиционированием экзоскелета, ограниченной глубиной резкости по сравнению с движениями человека или у пациентов с ротационными деформациями, их последствия следует учитывать в процессе управления рисками во время разработки экзоскелета, в дополнение к, возможно, более очевидные переводческие несоответствия. Воздействие как поступательных, так и вращательных смещений зависит от механики рассматриваемого экзоскелета, поскольку податливые детали могут смягчить последствия смещений [5].
В то время как клиницисты неофициально сообщают о проксимальном/дистальном поступательном смещении как о самой большой проблеме на практике при использовании экзоскелетов нижних конечностей, результаты этого исследования показывают, что ротационное смещение также может вызывать существенное увеличение сил и крутящих моментов и что этими эффектами нельзя пренебрегать. Поскольку такие ротационные смещения могут быть вызваны на практике неточным позиционированием экзоскелета, ограниченной глубиной резкости по сравнению с движениями человека или у пациентов с ротационными деформациями, их последствия следует учитывать в процессе управления рисками во время разработки экзоскелета, в дополнение к, возможно, более очевидные переводческие несоответствия. Воздействие как поступательных, так и вращательных смещений зависит от механики рассматриваемого экзоскелета, поскольку податливые детали могут смягчить последствия смещений [5].
Мы обнаружили снижение максимального сгибания при неизменном сгибательном моменте при более сильном ротационном смещении. Кроме того, величина смещения показала тенденцию к уменьшению с увеличением сгибания во время движения при ротационном и переднезаднем смещении. Поскольку прилагаемый момент сгибания, а также силы и моменты в суставе ILS увеличивались с увеличением сгибания, это указывает на то, что установка ILS и ортеза была вынуждена занять более выровненное положение. Это можно объяснить (1) соответствием рамы ортеза и манжет; (2) податливость мягких тканей; и/или (3) соскальзывание манжет ортеза. В то время как это уменьшение смещения по большей части обращалось во время разгибания, небольшое уменьшение смещения, происходящее в первом цикле сгибания/разгибания, было необратимым, особенно при больших смещениях. Это указывает на то, что, по крайней мере, некоторое уменьшение смещения может быть связано со скольжением или необратимой деформацией мягких тканей, что может привести к травмам мягких тканей при длительном или многократном использовании. В будущих исследованиях поведение величины несоосности с течением времени может быть дополнительно проанализировано, поскольку это может быть дополнительным индикатором увеличения нагрузки, вызванной увеличением несоосности.
Кроме того, величина смещения показала тенденцию к уменьшению с увеличением сгибания во время движения при ротационном и переднезаднем смещении. Поскольку прилагаемый момент сгибания, а также силы и моменты в суставе ILS увеличивались с увеличением сгибания, это указывает на то, что установка ILS и ортеза была вынуждена занять более выровненное положение. Это можно объяснить (1) соответствием рамы ортеза и манжет; (2) податливость мягких тканей; и/или (3) соскальзывание манжет ортеза. В то время как это уменьшение смещения по большей части обращалось во время разгибания, небольшое уменьшение смещения, происходящее в первом цикле сгибания/разгибания, было необратимым, особенно при больших смещениях. Это указывает на то, что, по крайней мере, некоторое уменьшение смещения может быть связано со скольжением или необратимой деформацией мягких тканей, что может привести к травмам мягких тканей при длительном или многократном использовании. В будущих исследованиях поведение величины несоосности с течением времени может быть дополнительно проанализировано, поскольку это может быть дополнительным индикатором увеличения нагрузки, вызванной увеличением несоосности. Точные эффекты смещения на уровне мягких тканей не были в центре внимания этого исследования. Однако они должны быть изучены в будущих исследованиях, чтобы лучше понять несоосность как опасность при использовании экзоскелета. Кроме того, наблюдаемые уровни сил и крутящих моментов должны быть связаны с комфортом и безопасностью пользователя, предоставляя разработчикам роботов важные знания о рисках и возможных стратегиях их снижения.
Точные эффекты смещения на уровне мягких тканей не были в центре внимания этого исследования. Однако они должны быть изучены в будущих исследованиях, чтобы лучше понять несоосность как опасность при использовании экзоскелета. Кроме того, наблюдаемые уровни сил и крутящих моментов должны быть связаны с комфортом и безопасностью пользователя, предоставляя разработчикам роботов важные знания о рисках и возможных стратегиях их снижения.
Установка, использованная в этом исследовании, имеет некоторые ограничения. Вес ИЛС (4,2 кг) явно меньше веса ноги человека, что составляет примерно 16% от общей массы тела [17]. Однако для измерения силы и крутящего момента во время маха имеет значение только вес сегмента голени, который из-за круглого веса на его дистальном конце составляет большую часть веса ILS (3,3 кг). Это примерно соответствует весу голени и стопы человека весом 57 кг, хотя распределение веса нереалистично, поскольку большая часть веса приходится на дистальный конец ILS [17]. Вес в связи с процедурой, используемой для регулировки выравнивания, мог вызвать дополнительные ограничения. Сила в проксимально-дистальном направлении не демонстрировала четких тенденций, связанных с ротационными или переднезадними поступательными смещениями, и показала заметные различия в начальных значениях в каждом испытании. На эти начальные значения мог повлиять эффект предварительного натяжения, вызванный величиной силы, с которой голень подталкивалась вверх экспериментатором во время корректировки смещения. Более высокое или более низкое начальное значение может дополнительно повлиять на анализируемые пиковые значения Fz. Эти эффекты могут быть уменьшены в будущих экспериментах, если пытаться поддерживать меньший вес ILS таким же образом во время каждой регулировки. Кроме того, верхний конец стержня бедра и верхний сегмент ортеза были зафиксированы, чтобы имитировать ситуацию, в которой и тазобедренный сустав субъекта, и верхний сегмент ортеза остаются в одном положении, и чтобы избежать соскальзывания ILS вниз.
Вес в связи с процедурой, используемой для регулировки выравнивания, мог вызвать дополнительные ограничения. Сила в проксимально-дистальном направлении не демонстрировала четких тенденций, связанных с ротационными или переднезадними поступательными смещениями, и показала заметные различия в начальных значениях в каждом испытании. На эти начальные значения мог повлиять эффект предварительного натяжения, вызванный величиной силы, с которой голень подталкивалась вверх экспериментатором во время корректировки смещения. Более высокое или более низкое начальное значение может дополнительно повлиять на анализируемые пиковые значения Fz. Эти эффекты могут быть уменьшены в будущих экспериментах, если пытаться поддерживать меньший вес ILS таким же образом во время каждой регулировки. Кроме того, верхний конец стержня бедра и верхний сегмент ортеза были зафиксированы, чтобы имитировать ситуацию, в которой и тазобедренный сустав субъекта, и верхний сегмент ортеза остаются в одном положении, и чтобы избежать соскальзывания ILS вниз. Однако в реальной ситуации экзоскелет и его носитель либо перемещались бы по комнате, либо экзоскелет фиксировался бы на уровне бедра, например, в стационарном роботизированном тренажере ходьбы, который позволял бы сегментам ног человека и коленному суставу двигаться вместе. комната. Таким образом, весовые эффекты точно не реконструируются. Кроме того, мы моделируем ситуацию во время маха и не рассматриваем ситуацию с весовой нагрузкой, которая значительно увеличила бы силы на опорно-двигательный аппарат, особенно при движениях из положения сидя в положение стоя [18]. Это подтверждается сообщением о переломе большеберцовой кости при использовании экзоскелета, который произошел во время движения из положения сидя в положение стоя после неожиданного отключения, которое, вероятно, вызвало смещение [10]. Однако эти ограничения пришлось принять ради практической осуществимости установки.
Однако в реальной ситуации экзоскелет и его носитель либо перемещались бы по комнате, либо экзоскелет фиксировался бы на уровне бедра, например, в стационарном роботизированном тренажере ходьбы, который позволял бы сегментам ног человека и коленному суставу двигаться вместе. комната. Таким образом, весовые эффекты точно не реконструируются. Кроме того, мы моделируем ситуацию во время маха и не рассматриваем ситуацию с весовой нагрузкой, которая значительно увеличила бы силы на опорно-двигательный аппарат, особенно при движениях из положения сидя в положение стоя [18]. Это подтверждается сообщением о переломе большеберцовой кости при использовании экзоскелета, который произошел во время движения из положения сидя в положение стоя после неожиданного отключения, которое, вероятно, вызвало смещение [10]. Однако эти ограничения пришлось принять ради практической осуществимости установки.
Другим аспектом ILS, который представляет собой лишь очень ограниченную и простую симуляцию реальной ноги, являются мягкие ткани. Мы использовали цилиндр из пенополиэфирной резины SG 40, который в некоторой степени имитирует мягкость и трение тканей человека, но мы не проводили никаких тестов, чтобы оценить, насколько хорошо этот материал может быть приближен к реальной ситуации. Также цилиндрическая форма является очень упрощенным подходом к воссозданию формы человеческой ноги, однако часто используется как представление сегментов человеческого тела, в том числе в технических стандартах [19].]. Влияние характеристик мягких тканей на результаты неизвестно. Тем не менее, уменьшение величины смещения во время сгибания ILS предполагает некоторые эффекты податливости мягких тканей, а гистерезис, наблюдаемый при нагрузках, может быть признаком компрессии мягких тканей [20]. Поэтому было бы интересно изучить другие подходы к имитации мягких тканей, такие как предложенные в литературе и стандартизации [21,22,23], чтобы лучше понять влияние различных характеристик мягких тканей. Кроме того, сустав, использованный для имитации колена человека, представляет собой простой шарнир с центрированной осью вращения, который не воспроизводит трансляцию оси вращения или тибиофеморальную ротацию, характерную для анатомического коленного сустава [7, 24].
Мы использовали цилиндр из пенополиэфирной резины SG 40, который в некоторой степени имитирует мягкость и трение тканей человека, но мы не проводили никаких тестов, чтобы оценить, насколько хорошо этот материал может быть приближен к реальной ситуации. Также цилиндрическая форма является очень упрощенным подходом к воссозданию формы человеческой ноги, однако часто используется как представление сегментов человеческого тела, в том числе в технических стандартах [19].]. Влияние характеристик мягких тканей на результаты неизвестно. Тем не менее, уменьшение величины смещения во время сгибания ILS предполагает некоторые эффекты податливости мягких тканей, а гистерезис, наблюдаемый при нагрузках, может быть признаком компрессии мягких тканей [20]. Поэтому было бы интересно изучить другие подходы к имитации мягких тканей, такие как предложенные в литературе и стандартизации [21,22,23], чтобы лучше понять влияние различных характеристик мягких тканей. Кроме того, сустав, использованный для имитации колена человека, представляет собой простой шарнир с центрированной осью вращения, который не воспроизводит трансляцию оси вращения или тибиофеморальную ротацию, характерную для анатомического коленного сустава [7, 24]. ]. Таким образом, микросмещения, вызванные кинематическим несоответствием между анатомическим суставом и суставом экзоскелета, не могут быть оценены с использованием текущей настройки. Например, внешнее вращение большеберцовой кости по отношению к бедренной кости, сопровождающее последние 20 градусов разгибания в колене человека [24], привело бы к более выраженному смещению при внешнем смещении вращения и тем самым к более сильному влиянию на нагрузку. В настоящем исследовании увеличение нагрузки в течение первых 20 градусов сгибания было низким. Однако в ситуации с весовой нагрузкой эти эффекты могут быть более выраженными. Кроме того, текущая установка не позволяет количественно определить давление ремня, которое теоретически может повлиять на поведение и результирующие силы и крутящие моменты. В частности, в испытаниях на поступательное смещение, когда ремни приходилось повторно прикреплять после каждой регулировки, могут возникнуть проблемы с различным и нестандартным давлением ремней.
]. Таким образом, микросмещения, вызванные кинематическим несоответствием между анатомическим суставом и суставом экзоскелета, не могут быть оценены с использованием текущей настройки. Например, внешнее вращение большеберцовой кости по отношению к бедренной кости, сопровождающее последние 20 градусов разгибания в колене человека [24], привело бы к более выраженному смещению при внешнем смещении вращения и тем самым к более сильному влиянию на нагрузку. В настоящем исследовании увеличение нагрузки в течение первых 20 градусов сгибания было низким. Однако в ситуации с весовой нагрузкой эти эффекты могут быть более выраженными. Кроме того, текущая установка не позволяет количественно определить давление ремня, которое теоретически может повлиять на поведение и результирующие силы и крутящие моменты. В частности, в испытаниях на поступательное смещение, когда ремни приходилось повторно прикреплять после каждой регулировки, могут возникнуть проблемы с различным и нестандартным давлением ремней. Однако сравнение эффектов смещения при вращении с очень тугими и ослабленными ремнями не выявило четких различий. Предполагая, что влияние различных давлений ремня также будет незначительным в других условиях смещения, мы можем быть более уверены в том, что требуемое повторное прикрепление ремней не повлияло на результаты испытаний на поступательное смещение. Поэтому, несмотря на обсуждаемые ограничения самой установки, эти факторы не должны влиять на анализ различий между различными несоосностями. Однако это препятствует обобщению результатов на реальные ситуации с точки зрения абсолютных сил/моментов.
Однако сравнение эффектов смещения при вращении с очень тугими и ослабленными ремнями не выявило четких различий. Предполагая, что влияние различных давлений ремня также будет незначительным в других условиях смещения, мы можем быть более уверены в том, что требуемое повторное прикрепление ремней не повлияло на результаты испытаний на поступательное смещение. Поэтому, несмотря на обсуждаемые ограничения самой установки, эти факторы не должны влиять на анализ различий между различными несоосностями. Однако это препятствует обобщению результатов на реальные ситуации с точки зрения абсолютных сил/моментов.
Другие ограничения связаны с использованием пассивного ортеза вместо активного экзоскелета. Ортез, использованный в этом исследовании, представляет собой пассивный коленный бандаж, обычно используемый для обеспечения стабильности после травм связок коленного сустава. Его точная кинематика и жесткость могут отличаться от поведения экзоскелетов, что влияет на обобщаемость результатов. Одни и те же величины и направления смещений могут привести к различным изменениям нагрузки на сустав при рассмотрении других устройств из-за различий в кинематике сустава и податливости [5]. Поскольку конструкция и механические свойства каждого экзоскелета различаются в зависимости от устройства, остается некоторая неопределенность. Мы заменили срабатывание экзоскелета тянущим усилием экспериментатора на нижний сегмент ортеза. Это простой и эффективный метод имитации приведения в действие экзоскелета, но он лежит в основе некоторых неопределенностей и вариаций. Мы наблюдали снижение максимального сгибания с повышенным ротационным смещением на фоне неизменного максимального момента сгибания в ортезном суставе. Таким образом, один и тот же момент сгибания был достигнут при меньших углах сгибания и более высоких смещениях. Экспериментатор, вероятно, чувствовал сопротивление и не тянул сильнее, чтобы достичь того же угла сгибания, а вместо этого сохранял максимальное тянущее усилие относительно постоянным.
Одни и те же величины и направления смещений могут привести к различным изменениям нагрузки на сустав при рассмотрении других устройств из-за различий в кинематике сустава и податливости [5]. Поскольку конструкция и механические свойства каждого экзоскелета различаются в зависимости от устройства, остается некоторая неопределенность. Мы заменили срабатывание экзоскелета тянущим усилием экспериментатора на нижний сегмент ортеза. Это простой и эффективный метод имитации приведения в действие экзоскелета, но он лежит в основе некоторых неопределенностей и вариаций. Мы наблюдали снижение максимального сгибания с повышенным ротационным смещением на фоне неизменного максимального момента сгибания в ортезном суставе. Таким образом, один и тот же момент сгибания был достигнут при меньших углах сгибания и более высоких смещениях. Экспериментатор, вероятно, чувствовал сопротивление и не тянул сильнее, чтобы достичь того же угла сгибания, а вместо этого сохранял максимальное тянущее усилие относительно постоянным. Принуждение к одному и тому же углу сгибания во всех условиях лучше имитировало бы поведение экзоскелета с контролем траектории и могло бы привести к более высоким абсолютным пиковым силам и крутящим моментам. Стандартизация угла пикового сгибания с использованием электрогониометра или статического индикатора для желаемого положения голени может быть рассмотрена для будущих исследований. Однако такой подход может привести к поломке определенных частей установки, а текущий подход, будучи более субъективным и подверженным вариациям, может имитировать управление крутящим моментом приводимого в действие экзоскелета. Еще одно ограничение связано с расчетом величины несоосности. Поскольку состояние покоя перед первым сгибанием использовалось для получения значений смещения за испытание, а смещение часто необратимо уменьшалось во время первого цикла сгибания/разгибания, величину смещения лучше рассчитать на основе ситуации после нескольких сгибаний или во время первого цикла. окончание судебного разбирательства.
Принуждение к одному и тому же углу сгибания во всех условиях лучше имитировало бы поведение экзоскелета с контролем траектории и могло бы привести к более высоким абсолютным пиковым силам и крутящим моментам. Стандартизация угла пикового сгибания с использованием электрогониометра или статического индикатора для желаемого положения голени может быть рассмотрена для будущих исследований. Однако такой подход может привести к поломке определенных частей установки, а текущий подход, будучи более субъективным и подверженным вариациям, может имитировать управление крутящим моментом приводимого в действие экзоскелета. Еще одно ограничение связано с расчетом величины несоосности. Поскольку состояние покоя перед первым сгибанием использовалось для получения значений смещения за испытание, а смещение часто необратимо уменьшалось во время первого цикла сгибания/разгибания, величину смещения лучше рассчитать на основе ситуации после нескольких сгибаний или во время первого цикла. окончание судебного разбирательства. Однако уместно отметить, что это уменьшение смещения имеет место, предполагая, что травмы могут возникнуть на самом первом этапе, поскольку либо биологические структуры вынуждены двигаться в неестественных направлениях, либо манжеты экзоскелета соскальзывают с кожи. В дополнение к этому мы заметили небольшие смещения в направлениях, не предназначенных для смещения. Например, когда предполагалось, что переднезаднее положение сустава ILS не будет смещено и должно оставаться на уровне 0 мм, он показал переднее смещение в среднем на 4,8 мм со стандартным отклонением 2,6 мм. Эти небольшие отклонения в направлениях, отличных от направления, проанализированного в соответствующих испытаниях, могут повлиять на результаты. Однако они были небольшими по сравнению с целевыми смещениями, и вряд ли можно было бы достичь идеального выравнивания в любой ситуации использования экзоскелета.
Однако уместно отметить, что это уменьшение смещения имеет место, предполагая, что травмы могут возникнуть на самом первом этапе, поскольку либо биологические структуры вынуждены двигаться в неестественных направлениях, либо манжеты экзоскелета соскальзывают с кожи. В дополнение к этому мы заметили небольшие смещения в направлениях, не предназначенных для смещения. Например, когда предполагалось, что переднезаднее положение сустава ILS не будет смещено и должно оставаться на уровне 0 мм, он показал переднее смещение в среднем на 4,8 мм со стандартным отклонением 2,6 мм. Эти небольшие отклонения в направлениях, отличных от направления, проанализированного в соответствующих испытаниях, могут повлиять на результаты. Однако они были небольшими по сравнению с целевыми смещениями, и вряд ли можно было бы достичь идеального выравнивания в любой ситуации использования экзоскелета.
Эти ограничения в настройке и процедуре могут снизить надежность абсолютных значений усилий и крутящих моментов в суставах, измеренных в этой настройке, поскольку анатомическая нога может вести себя по-другому, и демпфирование сил и крутящих моментов через мягкие ткани может быть не полностью воспроизведено. Потенциальное решение состоит в том, чтобы улучшить настройку ILS, добавив другой тип мягких тканей, который имеет задокументированные характеристики, напоминающие мягкие ткани человека [19, 25]. Однако, несмотря на эти ограничения, текущее исследование действительно показывает относительное влияние различных величин смещения на суставные силы и крутящие моменты, поддерживая гипотезу о том, что поступательное и ротационное смещение увеличивает нагрузку на коленный сустав.
Потенциальное решение состоит в том, чтобы улучшить настройку ILS, добавив другой тип мягких тканей, который имеет задокументированные характеристики, напоминающие мягкие ткани человека [19, 25]. Однако, несмотря на эти ограничения, текущее исследование действительно показывает относительное влияние различных величин смещения на суставные силы и крутящие моменты, поддерживая гипотезу о том, что поступательное и ротационное смещение увеличивает нагрузку на коленный сустав.
Несмотря на эти ограничения, настоящие результаты являются первым шагом к пониманию влияния смещения на опорно-двигательный аппарат. Мы показали, что несоосность экзоскелета голени может привести к многократному увеличению внутренних сил и крутящих моментов в колене по сравнению с теми, которые возникают в ситуации с правильным выравниванием. Это подтверждает необходимость тщательного рассмотрения опасностей, связанных не только с поступательным, но и с вращательным смещением при разработке и использовании носимых роботов. Чтобы помочь разработчикам роботов в проверке этого и других аспектов безопасности, европейский проект COVR предоставляет процедуры для проверочных испытаний в онлайн-инструментарии (www.safearoundrobots.com) [26, 27]. Будущие исследования могут расширить эти знания, исследуя больше условий и изучая варианты разработки улучшенных симуляторов конечностей. Установка, которая может измерять влияние несоосности в ситуации с весовой нагрузкой, повысит влияние результатов. Кроме того, базу знаний следует расширить, исследуя влияние смещения на уровень мягких тканей и связывая наблюдаемые эффекты с комфортом и безопасностью у реальных людей.
Чтобы помочь разработчикам роботов в проверке этого и других аспектов безопасности, европейский проект COVR предоставляет процедуры для проверочных испытаний в онлайн-инструментарии (www.safearoundrobots.com) [26, 27]. Будущие исследования могут расширить эти знания, исследуя больше условий и изучая варианты разработки улучшенных симуляторов конечностей. Установка, которая может измерять влияние несоосности в ситуации с весовой нагрузкой, повысит влияние результатов. Кроме того, базу знаний следует расширить, исследуя влияние смещения на уровень мягких тканей и связывая наблюдаемые эффекты с комфортом и безопасностью у реальных людей.
Заключение
В настоящей работе оценивалось влияние различного количества ротационных и поступательных смещений при использовании экзоскелета на мышечно-скелетные силы с использованием нового ILS и ортеза с ручным приводом. Насколько нам известно, это первое исследование, показывающее относительное влияние различных величин и направлений смещения на совместные силы и крутящие моменты. Мы обнаружили, что силы и крутящие моменты в коленном суставе увеличиваются в различных направлениях при введении смещения. В целом мы наблюдали возрастающую нагрузку на коленный сустав с увеличением смещения. В частности, большая внутренняя ротация коленного сустава ILS по отношению к ортезному суставу приводила к более высоким силам в медиальном направлении в коленном суставе, а также к более высоким моментам приведения, сгибания и внешней ротации. Более сильная наружная ротация коленного сустава ILS по отношению к ортезному суставу, в свою очередь, привела к более высоким боковым усилиям в суставе, а также к более высоким моментам отведения, сгибания и внутренней ротации. Более сильное заднее смещение сустава ILS по отношению к ортезному суставу приводило к более высоким боковым нагрузкам на колено, а также к более высоким моментам отведения и сгибания, в то время как более сильное переднее смещение сустава ILS по отношению к ортезному суставу приводило к более высоким медиальным силам в колене, а также более высокие моменты отведения и разгибания.
Мы обнаружили, что силы и крутящие моменты в коленном суставе увеличиваются в различных направлениях при введении смещения. В целом мы наблюдали возрастающую нагрузку на коленный сустав с увеличением смещения. В частности, большая внутренняя ротация коленного сустава ILS по отношению к ортезному суставу приводила к более высоким силам в медиальном направлении в коленном суставе, а также к более высоким моментам приведения, сгибания и внешней ротации. Более сильная наружная ротация коленного сустава ILS по отношению к ортезному суставу, в свою очередь, привела к более высоким боковым усилиям в суставе, а также к более высоким моментам отведения, сгибания и внутренней ротации. Более сильное заднее смещение сустава ILS по отношению к ортезному суставу приводило к более высоким боковым нагрузкам на колено, а также к более высоким моментам отведения и сгибания, в то время как более сильное переднее смещение сустава ILS по отношению к ортезному суставу приводило к более высоким медиальным силам в колене, а также более высокие моменты отведения и разгибания. Более сильное дистальное смещение сустава ILS по отношению к ортезному суставу приводило к более высоким задним силам и силам сжатия, в то время как проксимальное смещение сустава ILS имело тенденцию приводить к увеличению задних сил и сил растяжения. Эти результаты показывают, что все типы несоосности, включая ротационную несоосность, следует учитывать специально при разработке и применении экзоскелетов для реабилитации, помощи или улучшения человеческого функционирования. Будущие исследования должны быть сосредоточены на улучшенных конечностях манекенов, испытаниях с активированными экзоскелетами и тестировании ситуации с весовой нагрузкой, а также на потенциальных эффектах повышенных нагрузок, чтобы создать базу знаний о последствиях смещения экзоскелета.
Более сильное дистальное смещение сустава ILS по отношению к ортезному суставу приводило к более высоким задним силам и силам сжатия, в то время как проксимальное смещение сустава ILS имело тенденцию приводить к увеличению задних сил и сил растяжения. Эти результаты показывают, что все типы несоосности, включая ротационную несоосность, следует учитывать специально при разработке и применении экзоскелетов для реабилитации, помощи или улучшения человеческого функционирования. Будущие исследования должны быть сосредоточены на улучшенных конечностях манекенов, испытаниях с активированными экзоскелетами и тестировании ситуации с весовой нагрузкой, а также на потенциальных эффектах повышенных нагрузок, чтобы создать базу знаний о последствиях смещения экзоскелета.
Доступность данных и материалов
Наборы данных, использованные и/или проанализированные в ходе текущего исследования, можно получить у соответствующего автора по обоснованному запросу.
Сокращения
- DOF:
Степени свободы
- Футов:
Сила и крутящий момент
- Международная иностранная валюта:
Тренажер ноги с инструментами
- SG:
Удельный вес
Ссылки
 «>
«>Шишегар М., Керр Д., Блейк Дж. Систематический обзор исследований того, как роботизированные технологии могут помочь пожилым людям. Умное исцеление [Интернет]. 2018;7–8:1–18.
Google ученый
Бесслер Дж., Прандж-Ласондер Г.Б., Шульте Р.В., Шааке Л., Принсен Э.К., Бюрке Дж.Х. Возникновение и тип нежелательных явлений при использовании стационарных роботов для ходьбы — систематический обзор литературы. Фронтальный ИИ робота. 2020 г. https://doi.org/10.3389/frobt.2020.557606/полный.
Артикул
пабмед
ПабМед Центральный
Google ученый
Бесслер Дж., Прандж-Лазондер Г., Шааке Л., Саенс Дж., Бидард С., Фасси И. и др. Оценка безопасности реабилитационных роботов: обзор, определяющий навыки безопасности и текущие пробелы в знаниях. Фронтальный ИИ робота [Интернет]. 2021;8:33. Доступно по адресу: https://www.frontiersin. org/article/https://doi.org/10.3389/frobt.2021.602878
org/article/https://doi.org/10.3389/frobt.2021.602878
Рокон Э., Руис А.Ф., Рая Р., Шиле А., Понс Дж.Л., Белда-Лоис Дж.М. и др. Физическое взаимодействие человека и робота. Биомехатронные экзоскелеты носимых роботов [Интернет]. Чичестер: Джон Уайли и сыновья; 2008. с. 127–63. https://doi.org/10.1002/9780470987667.ch5.
Книга
Google ученый
Нэф М.Б., Юниус К., Россини М., Родригес-Герреро С., Вандерборхт Б., Лефебер Д. Компенсация смещения для полной кинематической совместимости человека и экзоскелета: современное состояние и оценка. Appl Mech Rev [Интернет]. 2018; 70:1–19. https://doi.org/10.1115/1.4042523/368929/Misalignment-Compensation-for-Full.
Артикул
Google ученый
Маллат Р., Халил М., Венчур Г., Боннет В., Мохаммед С. Смещение суставов человека и экзоскелета: систематический обзор. 2019 Fifth Int Conf Adv Biomed Eng [Интернет]. 2019; 1–4.
2019 Fifth Int Conf Adv Biomed Eng [Интернет]. 2019; 1–4.
Акияма Ю., Ямада Ю., Ито К., Ода С., Окамото С., Хара С. Метод испытаний для оценки контактной безопасности носимого робота — анализ нагрузки, вызванной смещением коленного сустава -. 21-я конференция IEEE ROM-MAN, 2012 г., IEEE Int Symp Robot Hum Interact Commun [Интернет]. ИЭЭЭ; 2012 [цитировано 15 июня 2020 г.]. п. 539–44. Доступно по адресу: http://ieeexplore.ieee.org/document/6343807/.
Zanotto D, Akiyama Y, Stegall P, Agrawal SK. Смещение коленного сустава в экзоскелетах нижних конечностей: влияние на походку пользователя. IEEE Trans Robot [Интернет]. 2015; 31: 978–87.
Артикул
Google ученый
He Y, Eguren D, Luu TP, Contreras-Vidal JL. Управление рисками и правила для медицинских экзоскелетов нижних конечностей: обзор. Med Devices Evid Res [Интернет]. 2017;10:89–107. https://doi.org/10.2147/MDER.S107134.
https://doi.org/10.2147/MDER.S107134.
Артикул
Google ученый
фургон Herpen FHM, ван Dijsseldonk RB, Rijken H, Keijsers NLW, Louwerens JWK, van Nes IJW. Отчет о клиническом случае: описание двух переломов во время использования экзоскелета с электроприводом. Случаи исследования спинного мозга [Интернет]. 2019;5:99. https://doi.org/10.1038/s41394-019-0244-2.
Артикул
пабмед
ПабМед Центральный
Google ученый
Санчес-Вильяманан MDC, Гонсалес-Варгас Х., Торричелли Д., Морено Х.С., Понс Х.Л. Соответствующие экзоскелеты нижних конечностей: всесторонний обзор принципов механического проектирования. J Neuroeng Rehabil 2019; 1–16.
Саркисян С.В., Ишмаэль М.К., Лензи Т. Механизм самовыравнивания повышает комфорт и производительность благодаря экзоскелету коленного сустава с электроприводом. IEEE Trans Neural Syst Rehabil Eng [Интернет]. 2021; 29: 629–40.
IEEE Trans Neural Syst Rehabil Eng [Интернет]. 2021; 29: 629–40.
Артикул
Google ученый
Li J, Zuo S, Xu C, Zhang L, Dong M, Tao C и др. Влияние совместимой конструкции на физическую силу взаимодействия человека и робота: тематическое исследование самоадаптирующегося механизма экзоскелета нижних конечностей. J Intel Robot Syst [Интернет]. 2020; 98: 525–38. https://doi.org/10.1007/s10846-019-01063-5.
КАС
Статья
Google ученый
Регалбуто М.А., Ровик Дж.С., Уокер П.С. Силы в коленном бандаже в зависимости от конструкции и расположения шарнира. Am J Sports Med [Интернет]. 1989;17:535–43. https://doi.org/10.1177/036354658
0415.
КАС
Статья
пабмед
Google ученый
Singer JC, Lamontagne M. Влияние функциональной конструкции коленного бандажа и смещения шарнира на механику суставов нижних конечностей. Клин Биомех [Интернет]. 2008; 23:52–9.
Клин Биомех [Интернет]. 2008; 23:52–9.
Артикул
Google ученый
Hacker SP, Schall F, Ignatius A, Dürselen L. Влияние смещения коленного бандажа на переднюю крестообразную связку. Протезирование Orthot Int [Интернет]. 2019;43:309–15.
Артикул
Google ученый
Dempster WT, Gaughran GRL. Свойства сегментов тела в зависимости от размера и веса. Ам Дж Анат [Интернет]. 1967; 120:33–54. https://doi.org/10.1002/aja.1001200104.
Артикул
Google ученый
Spungen AM, Gorman PH, Forrest GF, Asselin PK, Kornfeld S, Hong E, et al. Показания и противопоказания к экзоскелетной ходьбе у лиц с травмой позвоночника. В: Морено Дж. К., Масуд Дж., Шнайдер У., Мофрой С., Понс Дж. Л., редакторы. Proc 5th Int Symp Wearable Robot WeRob2020 [Интернет]. Онлайн: Спрингер; 2021. с. 227–31. https://doi.org/10.1007/978-3-030-69547-7_37.
с. 227–31. https://doi.org/10.1007/978-3-030-69547-7_37.
Международная организация по стандартизации. Робототехника — Применение ISO 13482 — Часть 1: методы испытаний, связанные с безопасностью. ИСО/ТО 23482-1:2020; 2020.
Yu W, Li Y, Zheng YP, Lim NY, Lu MH, Fan J. Измерения мягкости вспененных материалов с открытыми порами и мягких тканей человека. Meas Sci Technol [Интернет]. 2006; 17:1785–91. https://doi.org/10.1088/0957-0233/17/7/017.
КАС
Статья
Google ученый
Aurich-Schuler T, Grob F, van Hedel HJA, Labruyère R. Можно ли улучшить терапию Локоматом у детей и подростков? Адаптивное клиническое пилотное испытание, сравнивающее силу наведения, управление траекторией и FreeD. J Neuroeng Rehabil [Интернет]. 2017;14:76. https://doi.org/10.1186/s12984-017-0287-1.
Артикул
пабмед
ПабМед Центральный
Google ученый
 «>
«>Jansen O, Grasmuecke D, Meindl RC, Tegenthoff M, Schwenkreis P, Sczesny-Kaiser M, et al. Гибридный вспомогательный экзоскелет конечности HAL в реабилитации хронической травмы спинного мозга: доказательство концепции; результаты у 21 пациента. Мировой нейрохирург [Интернет]. 2018;110:e73–8. https://doi.org/10.1016/j.wneu.2017.10.080.
Артикул
пабмед
Google ученый
Мао Х., Ямада Ю., Акияма Ю., Окамото С. Характеристики механики контакта манекена с кожей во время развития процесса ссадины кожи. Tribol Lett [Интернет]. 2017;65:133. https://doi.org/10.1007/s11249-017-0916-7.
Артикул
Google ученый
Джохал П., Уильямс А., Рэгг П., Хант Д., Гедройц В. Большеберцово-бедренное движение в живом колене. Исследование кинематики коленного сустава с нагрузкой и без нагрузки с использованием «интервенционной» МРТ. J Biomech [Интернет]. 2005;38:269–76.
2005;38:269–76.
КАС
Статья
Google ученый
Асо М., Ямада Ю., Йошида К., Акияма Ю., Ито Ю. Оценка механических характеристик бедер человека для разработки сложных манекенов. Международная конференция IEEE по биомиметике роботов, 2013 г. [Интернет]. ИЭЭЭ; 2013. с. 1450–5. Доступно по адресу: http://ieeexplore.ieee.org/document/6739670/.
Бесслер Дж., Шааке Л., Бидард С., Буурке Дж.Х., Лассен А.Е.Б., Нильсен К. и др. COVR — к упрощенной оценке и проверке приложений совместной робототехники в широком диапазоне доменов на основе навыков безопасности роботов. В: Carrozza MC, Micera S, Pons JL, редакторы. Wearable Robot Challenges Trends Proc 4th Int Symp Wearable Robot WeRob2018, 16–20 октября 2018 г., Пиза, Италия [Интернет]. Пиза: Springer Nature Switzerland AG 2019; 2019. с. 123–6. https://doi.org/10.1007/978-3-030-01887-0_24.
Valori M, Scibilia A, Fassi I, Saenz J, Behrens R, Herbster S, et al. Проверка безопасности при сотрудничестве человека и робота: стандарты и новые перспективы. Робототехника [Интернет]. 2021;10:65.
Проверка безопасности при сотрудничестве человека и робота: стандарты и новые перспективы. Робототехника [Интернет]. 2021;10:65.
Артикул
Google ученый
Ссылки на скачивание
Благодарности
Авторы хотели бы поблагодарить Николь Зендман, студентку факультета мехатроники Саксионского университета прикладных наук, за ее вклад в разработку тренажера ноги с инструментами.
Финансирование
Эта работа в рамках проекта COVR финансируется исследовательской и инновационной программой Horizon 2020 Европейского Союза в соответствии с Соглашением о гранте № 779966. , Enschede, Нидерланды
Jule Bessler-Etten, Leendert Schaake, Gerdienke B. Prange-Lasonder & Jaap H. Buurke
Факультет биомедицинских сигналов и систем, Университет Твенте, Энсхеде, Нидерланды
Jule Bessler-Etten & Jaap H. Buurke
Департамент биомеханической инженерии, Университет Твенте, Энсхеде, Netherlands
Gerdienke B. Prange-Lasonder
Prange-Lasonder
. публикации автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Академия
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Вклады
Компания LS разработала тренажер ноги с инструментами. LS и JBE выполнили сбор и анализ данных. GBPL, JBE, JHB и LS внесли существенный вклад в концепцию и дизайн работы, а также в интерпретацию данных. JBE подготовила рукопись, а GBPL, JHB и LS существенно ее переработали. Все авторы прочитали и одобрили окончательный вариант рукописи.
Автор, ответственный за переписку
Переписка с
Жюль Бесслер-Эттен.
Декларация этики
Одобрение этики и согласие на участие
Неприменимо.
Согласие на публикацию
Не применимо.
Конкурирующие интересы
Авторы заявляют об отсутствии конкурирующих интересов.
Дополнительная информация
Примечание издателя
Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональной принадлежности.
Приложение
Приложение
См. Таблицу 6.
Таблица 6 Описание используемого набора маркеров
Полноразмерная таблица
Права и разрешения
Открытый доступ Международная лицензия, Attribution Эта статья находится под лицензией Creative Common.0 Attribution 4 который разрешает использование, совместное использование, адаптацию, распространение и воспроизведение на любом носителе или в любом формате, при условии, что вы укажете автора(ов) оригинала и источник, предоставите ссылку на лицензию Creative Commons и укажете, были ли внесены изменения .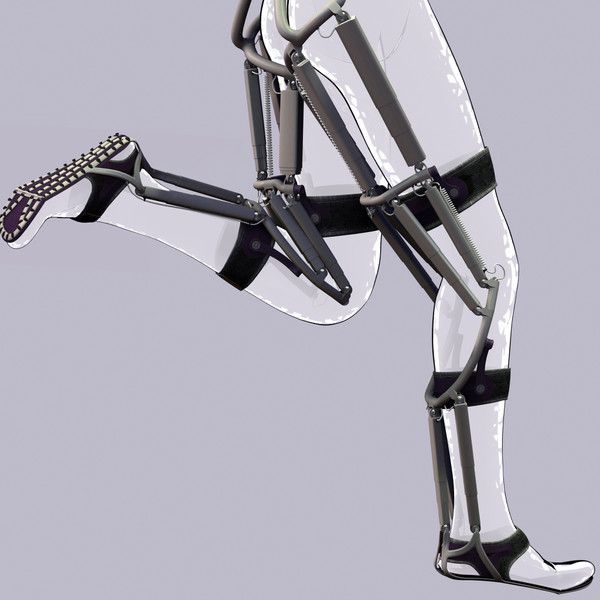 Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons на статью, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons.org/licenses/by/4.0/. Отказ Creative Commons от права на общественное достояние (http://creativecommons.org/publicdomain/zero/1.0/) применяется к данным, представленным в этой статье, если иное не указано в кредитной линии данных.
Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons на статью, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons.org/licenses/by/4.0/. Отказ Creative Commons от права на общественное достояние (http://creativecommons.org/publicdomain/zero/1.0/) применяется к данным, представленным в этой статье, если иное не указано в кредитной линии данных.
Перепечатки и разрешения
Об этой статье
Обзор роботов-экзоскелетов для реабилитации нижних конечностей | Китайский журнал машиностроения
- Обзор
- Открытый доступ
- Опубликовано:
- Ди Ши 1,2 ,
- Усян Чжан
ORCID: orcid.org/0000-0001-6141-3368 1,2 , - Вэй Чжан 1,2 и
- …
- Силун Дин 1,2
Китайский журнал машиностроения
том 32 , Номер статьи: 74 (2019)
Процитировать эту статью
26 тыс. обращений
109 цитирований
Сведения о показателях
Abstract
Роботы-экзоскелеты для реабилитации нижних конечностей объединяют сенсорные, контрольные и другие технологии и демонстрируют характеристики бионики, робототехники, науки об информации и управлении, медицины и других междисциплинарных областей. В этом обзоре представлены типичные продукты и прототипы реабилитационных роботов с экзоскелетом нижних конечностей, а также проанализированы и обобщены современные методы. Поскольку целью реабилитационных тренировок является восстановление спортивных способностей пациентов до нормального уровня, изучение походки человека является основой исследований роботов для реабилитации экзоскелетов нижних конечностей. Таким образом, в этом обзоре критически оценивается прогресс исследований в области анализа походки человека и систематически обобщаются разработки в области механического проектирования и управления роботами-экзоскелетами для реабилитации нижних конечностей. Из характеристик типичных прототипов можно сделать вывод, что эти роботы могут быть связаны с человеческими конечностями в качестве носимых форм; кроме того, можно управлять движением робота в каждом суставе, чтобы имитировать нормальную походку и управлять конечностью пациента, чтобы реализовать реабилитационную тренировку с помощью робота.
В этом обзоре представлены типичные продукты и прототипы реабилитационных роботов с экзоскелетом нижних конечностей, а также проанализированы и обобщены современные методы. Поскольку целью реабилитационных тренировок является восстановление спортивных способностей пациентов до нормального уровня, изучение походки человека является основой исследований роботов для реабилитации экзоскелетов нижних конечностей. Таким образом, в этом обзоре критически оценивается прогресс исследований в области анализа походки человека и систематически обобщаются разработки в области механического проектирования и управления роботами-экзоскелетами для реабилитации нижних конечностей. Из характеристик типичных прототипов можно сделать вывод, что эти роботы могут быть связаны с человеческими конечностями в качестве носимых форм; кроме того, можно управлять движением робота в каждом суставе, чтобы имитировать нормальную походку и управлять конечностью пациента, чтобы реализовать реабилитационную тренировку с помощью робота.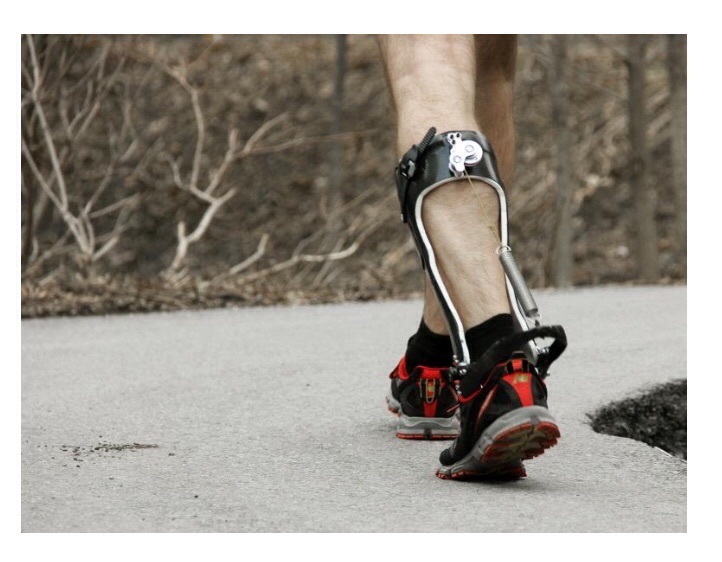 Таким образом, интеграция человека и робота является одним из наиболее важных направлений исследований, и в этом контексте проектирование гибридной жесткой-гибкой-мягкой структуры, индивидуальная персонализированная генерация походки и мультимодальное слияние информации являются тремя ключевыми технологиями.
Таким образом, интеграция человека и робота является одним из наиболее важных направлений исследований, и в этом контексте проектирование гибридной жесткой-гибкой-мягкой структуры, индивидуальная персонализированная генерация походки и мультимодальное слияние информации являются тремя ключевыми технологиями.
Введение
Реабилитационный робот, представляющий собой робота, непосредственно обслуживающего человека, имеет широкие перспективы применения в реабилитационной терапии с высокими профессиональными требованиями. Поэтому разработка передовых реабилитационных роботов имеет большое значение.
Исследования реабилитационных роботов нижних конечностей для пациентов с нарушениями движений конечностей являются важной частью исследований реабилитационных роботов. К 2030 году 18,2% населения Китая будет старше 65 лет. Из-за старения общества и повышения уровня жизни число людей с дискинезией конечностей быстро растет. Нарушения движения конечностей могут привести к аномальной походке и повлиять на нормальную ходьбу. Для пациентов с двигательными расстройствами нижних конечностей активные реабилитационные занятия следует начинать как можно раньше. В Китае, где самая высокая частота инсультов в мире [1], насчитывается около 15 миллионов инвалидов с двигательными нарушениями нижних конечностей, такими как детский церебральный паралич, гемиплегия и параплегия, и почти 40 миллионов пожилых инвалидов, потерявших способность способность ходить в связи с возрастом. Около 350 000 человек срочно нуждаются в реабилитационном техническом персонале, но имеется менее 20 000 человек. Поэтому роботы для реабилитации нижних конечностей имеют большое значение. Использование реабилитационных роботов может снизить нагрузку на терапевтов, реализовать обнаружение данных во время обучения и помочь в количественной оценке восстановления контролируемым и воспроизводимым образом [2].
Для пациентов с двигательными расстройствами нижних конечностей активные реабилитационные занятия следует начинать как можно раньше. В Китае, где самая высокая частота инсультов в мире [1], насчитывается около 15 миллионов инвалидов с двигательными нарушениями нижних конечностей, такими как детский церебральный паралич, гемиплегия и параплегия, и почти 40 миллионов пожилых инвалидов, потерявших способность способность ходить в связи с возрастом. Около 350 000 человек срочно нуждаются в реабилитационном техническом персонале, но имеется менее 20 000 человек. Поэтому роботы для реабилитации нижних конечностей имеют большое значение. Использование реабилитационных роботов может снизить нагрузку на терапевтов, реализовать обнаружение данных во время обучения и помочь в количественной оценке восстановления контролируемым и воспроизводимым образом [2].
Роботы-экзоскелеты для реабилитации нижних конечностей, которые представляют собой основной класс реабилитационных роботов, соединяются с человеческим телом носимым способом и могут контролировать движение всех суставов в процессе тренировки. Исследования роботов-экзоскелетов для реабилитации нижних конечностей начались в 1960-х годах [3, 4]. Из-за технических ограничений эти ранние роботы не достигли ожидаемых целей, но заложили основу для последующих исследований. В последние десятилетия, особенно после того, как Lokomat был применен в клинической реабилитации, роботы-экзоскелеты для реабилитации нижних конечностей постепенно стали основной темой исследований. Они в основном используются для оказания силовой помощи и реабилитации пожилых людей и пациентов с двигательными дисфункциями нижних конечностей. Экзоскелетная робототехника — это комплексная технология, которая объединяет датчики, управление, информацию и информатику для создания носимого механического устройства. Многие предприятия и научно-исследовательские институты провели соответствующие исследовательские работы и достигли нескольких вех в теории и применении этих роботов. По своему применению эти роботы делятся на два типа, а именно для беговой дорожки и наземного применения.
Исследования роботов-экзоскелетов для реабилитации нижних конечностей начались в 1960-х годах [3, 4]. Из-за технических ограничений эти ранние роботы не достигли ожидаемых целей, но заложили основу для последующих исследований. В последние десятилетия, особенно после того, как Lokomat был применен в клинической реабилитации, роботы-экзоскелеты для реабилитации нижних конечностей постепенно стали основной темой исследований. Они в основном используются для оказания силовой помощи и реабилитации пожилых людей и пациентов с двигательными дисфункциями нижних конечностей. Экзоскелетная робототехника — это комплексная технология, которая объединяет датчики, управление, информацию и информатику для создания носимого механического устройства. Многие предприятия и научно-исследовательские институты провели соответствующие исследовательские работы и достигли нескольких вех в теории и применении этих роботов. По своему применению эти роботы делятся на два типа, а именно для беговой дорожки и наземного применения. Пациенты могут пройти тренировку ходьбы с помощью роботов-экзоскелетов на беговой дорожке на беговой дорожке. В этих роботах, помимо экзоскелета, который используется для обеспечения движения ног [3], требуется система поддержки веса тела (ОПТ) для снижения гравитационных сил, действующих на ноги, обеспечения безопасности и сохранения равновесия; некоторые примеры таких роботов включают ALEX [2], Lokomat [4] и LOPES [5], как показано на рисунке 1. Роботы с надземным экзоскелетом помогают пациентам восстановить наземную походку, как показано на рисунке 2; примеры включают eLEGS (экзоскелетная система ходьбы нижних конечностей) [6, 7], Indego [8], ReWalk [9].], MINDWALKER [10, 11] и HAL (гибридная вспомогательная конечность) [12].
Пациенты могут пройти тренировку ходьбы с помощью роботов-экзоскелетов на беговой дорожке на беговой дорожке. В этих роботах, помимо экзоскелета, который используется для обеспечения движения ног [3], требуется система поддержки веса тела (ОПТ) для снижения гравитационных сил, действующих на ноги, обеспечения безопасности и сохранения равновесия; некоторые примеры таких роботов включают ALEX [2], Lokomat [4] и LOPES [5], как показано на рисунке 1. Роботы с надземным экзоскелетом помогают пациентам восстановить наземную походку, как показано на рисунке 2; примеры включают eLEGS (экзоскелетная система ходьбы нижних конечностей) [6, 7], Indego [8], ReWalk [9].], MINDWALKER [10, 11] и HAL (гибридная вспомогательная конечность) [12].
Рисунок 1
Реабилитационные экзоскелеты нижних конечностей на основе беговой дорожки
Изображение в полный размер
Рисунок 2
Наземные экзоскелеты для реабилитации нижних конечностей развитые страны. Китай срочно нуждается в реабилитационно-вспомогательных устройствах и обладает самым большим рыночным потенциалом в мире. Ожидается, что к 2020 году промышленные масштабы превысят 700 миллиардов. Университеты и институты Китая [13,14,15,16,17,18,19,20,21,22] провели ряд исследований и получили многообещающие результаты. Однако между китайскими и зарубежными исследованиями существуют глубокие различия, и систематическая индустрия еще не сформирована. Таким образом, китайские исследования роботов-экзоскелетов для реабилитации нижних конечностей могут произвести еще одну революцию в индустрии роботов.
Китай срочно нуждается в реабилитационно-вспомогательных устройствах и обладает самым большим рыночным потенциалом в мире. Ожидается, что к 2020 году промышленные масштабы превысят 700 миллиардов. Университеты и институты Китая [13,14,15,16,17,18,19,20,21,22] провели ряд исследований и получили многообещающие результаты. Однако между китайскими и зарубежными исследованиями существуют глубокие различия, и систематическая индустрия еще не сформирована. Таким образом, китайские исследования роботов-экзоскелетов для реабилитации нижних конечностей могут произвести еще одну революцию в индустрии роботов.
Поэтому в этой статье мы представляем обзор роботов-экзоскелетов для реабилитации нижних конечностей. Исследования и результаты в области механического проектирования и методов управления обсуждаются после обобщения сводки по анализу походки человека. Описано современное состояние исследований роботов-экзоскелетов для реабилитации нижних конечностей и обсуждена интеграция человека и робота, которая является одним из важнейших направлений исследований.
Анализ походки человека
Носимость является одной из наиболее важных характеристик экзоскелетных роботов для реабилитации нижних конечностей, и, следовательно, такие роботы должны иметь хорошую совместимость с человеком. Таким образом, иллюстрация анатомии нижних конечностей и анализ походки человека могут стать основой для проектирования и управления реабилитационными роботами с экзоскелетом нижних конечностей.
Анатомия нижних конечностей
Процесс ходьбы человека в основном осуществляется нижними конечностями, в связи с чем необходим анализ их строения и особенностей движения.
Ходьба достигается за счет координации между тазом, бедром, коленом и лодыжкой. Диапазон их движений (ROM) показан в таблице 1. Таз расположен между туловищем и бедрами. В качестве шаровидного сустава тазобедренный сустав образован головкой бедренной кости и тазовой костью и позволяет выполнять одновременные движения между бедрами и тазом [23]. Он позволяет выполнять сагиттальное сгибание/разгибание, фронтальное отведение/приведение и поперечную наружную/внутреннюю ротацию [24]. Коленный сустав представляет собой суставной комплекс, состоящий из большеберцово-бедренного и надколенниково-бедренного суставов. Их движение происходит в двух плоскостях, допуская сагиттальное сгибание/разгибание и поперечную внутреннюю/наружную ротацию [23]. Во время ходьбы колени выполняют важные функции. В фазе переноса колени сокращают длину ноги за счет сгибания [25]. В фазе опоры они остаются согнутыми, чтобы поглощать удары и передавать силы через ноги. Лодыжка/стопа представляет собой сложную структуру, которая поглощает этот удар и придает толчок телу. Движения голеностопного сустава в основном происходят в голеностопном и подтаранном суставах [24]. Голеностопный сустав расположен между таранной, дистальной большеберцовой и малоберцовой костями для обеспечения подошвенного/тыльного сгибания в виде шарнирного сустава, в котором поверхность одной кости имеет форму катушки, а поверхность другой кости вогнутая. Подтаранный сустав расположен между пяточной и таранной костью и обеспечивает выворот/инверсию и внутреннюю/наружную ротацию.
Коленный сустав представляет собой суставной комплекс, состоящий из большеберцово-бедренного и надколенниково-бедренного суставов. Их движение происходит в двух плоскостях, допуская сагиттальное сгибание/разгибание и поперечную внутреннюю/наружную ротацию [23]. Во время ходьбы колени выполняют важные функции. В фазе переноса колени сокращают длину ноги за счет сгибания [25]. В фазе опоры они остаются согнутыми, чтобы поглощать удары и передавать силы через ноги. Лодыжка/стопа представляет собой сложную структуру, которая поглощает этот удар и придает толчок телу. Движения голеностопного сустава в основном происходят в голеностопном и подтаранном суставах [24]. Голеностопный сустав расположен между таранной, дистальной большеберцовой и малоберцовой костями для обеспечения подошвенного/тыльного сгибания в виде шарнирного сустава, в котором поверхность одной кости имеет форму катушки, а поверхность другой кости вогнутая. Подтаранный сустав расположен между пяточной и таранной костью и обеспечивает выворот/инверсию и внутреннюю/наружную ротацию. В основу механического проектирования реабилитационных экзоскелетных роботов положен анализ строения нижних конечностей.
В основу механического проектирования реабилитационных экзоскелетных роботов положен анализ строения нижних конечностей.
Таблица 1 Диапазон движений нижних конечностей
Полноразмерная таблица
Анализ походки человека
Нормальную походку пациентов нельзя измерить напрямую из-за нарушения их двигательных функций. Поэтому необходимо проводить реабилитационную тренировку и оценивать данные о нормальной походке, что важно в клинических применениях. Пациенты с гемиплегией или физическими недостатками часто следуют заранее определенной траектории в своей реабилитации. Эти заранее определенные траектории могут быть получены из сбора данных о нормальной походке. С помощью анализа походки можно выявить соответствующие характеристики походки человека. Длина, ширина и скорость шага используются для характеристики походки человека. Таким образом, параметры движения тела человека и структурные параметры оказывают существенное влияние на характеристики походки человека.
На походку человека влияет скорость ходьбы [26, 27], что подтверждается анализом параметров походки [28] и углов суставов [29], что подтверждается записью и анализом данных о походке с различной скоростью ходьбы по дорожке [30 ] или беговой дорожке [31]. Поскольку большинство реабилитационных роботов используют систему поддержки тела во время реабилитационных тренировок, необходимо анализировать походку человека на беговой дорожке. Кроме того, исследования показали, что рост как структурный параметр оказывает ограниченное влияние на походку человека по сравнению со скоростью ходьбы. Это было доказано сравнением разницы в корреляции между регрессионными моделями при использовании скорости и нормализованной скорости (нормированной на длину ноги) [30, 32] или при использовании ступенчатой регрессии в регрессионных моделях с включением в качестве параметра роста [31]. . Кроме того, эти исследования были сосредоточены на влиянии этих параметров на углы суставов. Исследования также выявили взаимосвязь между параметрами походки и индексом массы тела (ИМТ) [26, 33]. Эти исследования заложили основу для контроля над роботами-экзоскелетами для реабилитации нижних конечностей.
Механика роботов-экзоскелетов для реабилитации нижних конечностей
Роботы-экзоскелеты для реабилитации нижних конечностей нуждаются в механической конструкции, соответствующей нижним конечностям человека, для реализации передачи силы и энергии через носимое соединение. Этого можно достичь, спроектировав соответствующий механизм робота и привод. Обзор задействованной механики представлен в таблице 2.
Таблица 2 Обзор экзоскелетов нижних конечностей
Полноразмерный стол
Анатомия верхних конечностей человека
Механизм экзоскелетных роботов реабилитации нижних конечностей должен реализовывать движения, соответствующие нижним конечностям человека. Конструкция механизма экзоскелетной системы Беркли (BLEEX) заложила основу для впоследствии разработанных роботов. Чтобы обеспечить безопасность и максимально избежать столкновений с пользователями, BLEEX почти антропоморфен, но не включает в себя все степени свободы, доступные для человеческих ног (рис. 3). Кроме того, суставы BLEEX являются чисто ротационными суставами и, следовательно, отличаются от суставов человека [34]. Бедро упрощено как три вращательных сустава для достижения сгибания/разгибания, отведения/разгибания и внутреннего/наружного вращения. Колено упрощено как вращающийся сустав для достижения чистого сагиттального вращения. Голеностоп упрощен до трех вращательных суставов для достижения подошвенного/тыльного сгибания, выворота/инверсии и внутреннего/наружного вращения. Конфигурация современных экзоскелетных роботов нижних конечностей, таких как ALEX [35], Lokomat [4, 36], LOPES [37, 38], Rewalk [9], Rex [39] и HAL [40], в основном основаны на BLEEX.
Рисунок 3
Биомеханическая конструкция BLEEX [41]
Изображение в полный размер экзоскелета заключается в том, что пациенту не нужно нести весь вес робота, что усложняет механическую конструкцию робота. В то же время реабилитационная тренировка на беговой дорожке требует меньше места, но есть разница между походкой на беговой дорожке и естественной походкой [42, 43], что является важным аспектом в клинических оценках [44,45,46,47]. . Дополнительные механизмы были разработаны для движения таза. Движения таза также интегрируются в новые роботизированные устройства, такие как KineAssist [48,49].,50]. ALEX III может активно контролировать движения таза [45, 51]. Новая версия Lokomat включает в себя дополнительный модуль FreeD для улучшения терапии за счет обеспечения бокового смещения таза и поперечного вращения, как показано на рисунке 4.
Рисунок 4
Дополнительный модуль FreeD
Изображение в натуральную величину что существует несоответствие движений робота и человека, проявляющееся в несоответствии суставных центров робота и человека. Разработка инновационного механизма может предложить решение этой проблемы. Для тазобедренных суставов используется параллельная конструкция для реализации трех вращательных движений и автоматического центрирования с бедром человека [52, 53, 54], как показано на рисунке 5. Когда параллельный механизм 3-UPS устанавливается на талии и бедре человека, бедро человека и механизм связаны как единое целое, что можно рассматривать как параллельный механизм 3-UPS/1-S [52] (рис. 5(а)). Новый метаморфический параллельный механизм был применен для реабилитации нижних конечностей с использованием двух конфигураций, 3-UPS/S и 2-RPS/UPS/S, с учетом человеческого тазобедренного сустава для удовлетворения различных потребностей пациентов на разных этапах реабилитационной терапии. 53] (рис. 5(б)). Прототип асимметричного параллельного механизма с полным ограничением предназначен для помощи и реабилитации тазобедренного сустава и использует пантографы в качестве ограниченных ног с тремя вращениями вместо использования трех последовательных вращательных суставов-ног, чтобы избежать недостатков, таких как сингулярность, неопределенность или взаимодействие с другими ногами [54]. (Рисунок 5(с)).
Рисунок 5
Параллельные механизмы помощи тазобедренному суставу
Изображение в полный размер
В процессе упрощения коленный сустав рассматривается как вращающийся сустав, и учитываются только движения сгибания и разгибания. На самом деле движение колена является относительно сложным, и поэтому для решения этой проблемы были разработаны различные механизмы, как показано на рисунке 6. Для коленного сустава использовалось адаптивное колено, и оно могло эффективно устранить негативное воздействие на колени человека [55] ( Рисунок 6(а)). На основе комплекса коленного сустава осевое поступательное движение сочеталось с вращательным движением, и для реабилитации нижних конечностей был разработан последовательно-параллельный гибридный механизм [17] (рис. 6(b)).
Рисунок 6
Новые механизмы для коленных суставов
Изображение в полный размер
Человеческое тело представляет собой сопряженную структуру, основанную на структуре и характеристиках костно-мышечной ткани. В соответствии с этим принципом некоторые ученые предложили новый тип конструкции роботов для реабилитации нижних конечностей. Для механической конструкции нет жесткой опоры, но она включает в себя мягкое тело и программную структуру, использующую кабели для обеспечения питания; это снижает реакцию на мышечные сокращения и расход энергии организма. Ожидается, что эта конструкция для связанных носимых роботов проложит новое направление исследований [56] (рис. 7).
Рисунок 7
Мягкий экзоскелет
Изображение в полный размер
Приводная конструкция
Большинство реабилитационных роботов с экзоскелетом нижних конечностей приводятся в движение электродвигателями. В eLEGS только сагиттальное сгибание/разгибание тазобедренного и коленного суставов приводится в действие с помощью двигателей, в то время как лодыжка остается пассивной [57]. Бедро и колено Локомата приводятся в действие двигателями с линейными шарико-винтовыми парами [58].
Примечательной особенностью вышеописанного метода является то, что водитель размещается непосредственно на корпусе робота, что увеличивает его массу и сложность. Следовательно, использование двигателей с тросовым приводом может уменьшить массу самого робота-экзоскелета, поскольку двигатель и привод размещаются на платформе, а не непосредственно на экзоскелете [59]. ].
Экзоскелеты для реабилитации нижних конечностей в основном приводятся в движение жесткой трансмиссией без податливости. Это вызывает сильное вибрационное воздействие, трудности прямого управления силой и приводит к сложной роботизированной системе. Поэтому был разработан последовательный эластичный привод (SEA) для достижения контроля силы и повышения гибкости привода в RoboKnee [60] (рис. 8(a)). SEA с комбинацией тросового привода применялась в LOPES [59] (рис. 8(b)). Эластичный привод с переменной жесткостью был разработан для экзоскелетов нижних конечностей путем регулировки жесткости эластичных элементов, приводимых в действие последовательной упругостью [61] (рис. 8(b)).
Рисунок 8
Эластичный привод серии A
Изображение в полный размер
Управление роботами для реабилитации нижних конечностей
Планирование траектории
Основной целью реабилитационного обучения является восстановление двигательных функций нижних конечностей у пациентов с ограниченными возможностями до нормального уровня [ 62]; поэтому в процессе реабилитационного обучения нормальный паттерн походки требуется в качестве эталонного входа в систему управления, в качестве цели обучения и в качестве стандарта оценки реабилитации. Для пациентов с гемиплегией или физическими недостатками часто используется заранее определенная траектория. Эти заданные траектории могут быть получены из данных о нормальной походке. Однако из-за ограниченного объема данных трудно сопоставить полученные данные о движении с различными характеристиками движения человека, поэтому для прогнозирования данных, отсутствующих в тестовой выборке, был предложен метод генерации параметризованного шаблона движения.
Траектории Lokomat можно настроить для конкретного пациента и длины шага [58]. В LOPES траектории генерируются методом, основанным на регрессионном анализе, для восстановления траекторий, зависящих от роста и скорости [31]; кроме того, «дополнительная оценка движения конечности» может использоваться для создания эталонного движения с использованием движения здоровых конечностей [63]. Когда собранное количество выборок достаточно велико, для предсказания движения часто используются методы статистического обучения, такие как нейронные сети радиальной базисной функции (RBF) [64] и многослойная нейронная сеть персептрона (MLPNN) [65].
Существует еще один тип планирования походки, который не опирается на конкретные данные; однако это зависит от заданных параметров походки, таких как длина шага и продолжительность поворота, для создания моделей походки. Модель прогнозирующего управления (MPC) используется для онлайн-генерации траектории на основе параметров походки [66].
Система управления
В большинстве экзоскелетных роботов для реабилитации нижних конечностей используется иерархическая стратегия управления. Как правило, система управления делится на два уровня. Верхний уровень — это уровень принятия решений, который реализует управляющие решения и генерацию траектории, а нижний уровень — сервоуровень, который реализует сервоуправление системой привода [65]. Что касается наземных реабилитационных экзоскелетов, то они разделены на три слоя из-за большого количества задействованных движений (Рисунок 9).). В частности, добавляется уровень взаимодействия человека и робота, чтобы адаптироваться к тренировочным потребностям различных движений [6]. Обзор метода управления экзоскелетами нижних конечностей показан в таблице 3.
Рисунок 9
Обобщенная схема управления для нижних конечностей [67]
Изображение в натуральную величину
Таблица 3 Обзор методов управления, используемых для экзоскелетов нижних конечностей
Полноразмерный стол
На ранних стадиях реабилитации нижние конечности пациентов волочат для непрерывного пассивного движения (CPM) для пассивной тренировки, которая может эффективно сохранять гибкость суставов в течение длительного времени. Соответственно, контроль положения гарантирует, что робот может точно следовать желаемой позиции. В этом случае информация о движении робота измеряется датчиками, такими как линейные и поворотные потенциометры [40, 68, 69].], блоки измерения инерции (IMU) [70, 71], датчики крутящего момента для измерения крутящего момента [70, 71] и датчики давления стопы для измерения реакции опоры для обнаружения событий походки [72, 73]. Методы управления, широко используемые в сервоуправлении, также использовались в роботах-экзоскелетах для реабилитации нижних конечностей. Например, пропорционально-дифференциальное управление (управление PD) [68], вычисляемое управление крутящим моментом [74], нечеткое управление [74], надежное управление с переменной структурой [75], нечеткое пропорционально-интегрально-дифференциальное управление (ПИД-управление) и переменная структура в скользящем режиме. control [76] были использованы для экзоскелетных роботов нижних конечностей. Такое управление положением на самом деле является типом управления слежением. Гибридное управление силой и положением также использовалось для регулировки выходной силы, воздействующей на пациента. Это была первая когда-либо разработанная стратегия контроля импеданса или проводимости. Он применялся в Lokomat для направления ног пациентов и создания крутящего момента в тазобедренном и коленном суставах [4]. В LOPES роботизированная поддержка управлялась с помощью контроллера виртуальной модели (VMC) [69]. , 77].
Все описанные выше системы управления являются пассивными по своей природе, поскольку в системе не учитывается владелец. Повышая активное участие, можно снизить зависимость пациентов от помощи роботов за счет улучшения эффекта реабилитационного обучения. Для достижения этого эффекта важно интегрировать людей в систему управления. Как упоминалось ранее, датчики использовались для измерения информации о движении человека и информации о взаимодействии человека с роботом для управления роботом. В ALEX для направления ног пациентов используется управление силовым полем [45, 70].
Другой способ заключается в измерении биологических сигналов человека, таких как сигналы электромиографии (ЭМГ) и электроэнцефалограммы (ЭЭГ), для восприятия движений тела. В настоящее время сигналы ЭМГ используются в таких роботах, как HAL [78]. Обнаруживаемый сигнал ЭМГ используется в качестве триггерного переключателя для оценки времени оказания помощи роботом [78, 79]. В качестве непрерывного управления в роботизированном экзоскелете голеностопного сустава используется пропорциональное миоэлектрическое управление [80, 81]. Однако роботизированная реабилитация на основе ЭМГ подходит только для пациентов, способных производить достаточно высокий уровень мышечной активности. Интерфейсы мозг-машина для восстановления подвижности у тяжело парализованных пациентов [82] применялись во многих экзоскелетах для реабилитации нижних конечностей [39]., 83,84,85]. Однако это исследование все еще находится на ранней стадии. Все описанные выше системы полагаются на наличие датчиков и управляют сигналами, измеряемыми датчиками. В последнее время разрабатываются роботы, не основанные на датчиках. В этом случае используется контроллер формирования проводимости [86].
Выводы и перспективы
Выводы
Роботы-экзоскелеты для реабилитации нижних конечностей объединяют сенсорные, управляющие и другие технологии и демонстрируют характеристики бионики, робототехники, науки об информации и управлении, медицины и других междисциплинарных областей и, следовательно, стали предметом крупных исследований точка доступа. В последние годы был достигнут заметный прогресс в механическом проектировании и проектировании систем управления, на основе которого было коммерциализировано несколько продуктов. Тем не менее, по-прежнему существует большой пробел в исследованиях в отношении интеграции человека и робота. Носитель (пациент) должен органично сочетаться с роботом, образуя единое целое. Только когда реализуется настоящая интеграция человеческого тела и робота, реабилитационное обучение может быть действительно эффективным.
Outlook
Проблема интеграции человека и робота является актуальным направлением исследований. В 2017 году Национальный фонд естественных наук Китая (NSFC) запустил крупную исследовательскую программу Tri-Co Robot (т. восприятие и естественное взаимодействие [87]. Интеграция человека и робота является ключевой проблемой в разработке и управлении роботами-экзоскелетами для реабилитации нижних конечностей. Таким образом, такая интеграция должна включать три компонента, а именно структуру, движение и реакцию.
Гуманоидные конструкции и гибкие приводные системы должны быть спроектированы таким образом, чтобы обеспечить структурную интеграцию между роботами и пациентами. В настоящее время используется упрощенная модель движения человека и жесткая конструкция конструкции, что приводит к несоответствию движений робота и человека и влияет на удобство ношения и реабилитационную подготовку. Поэтому SEA используется для повышения гибкости местной структуры. Добавление гибкости неизбежно приводит к структурной сложности и трудностям в управлении. Идеальная структура робота представляет собой гибридную структуру «жесткая-гибкая-мягкая». Однако конфигурации жесткой-мягкой-мягкой связи должны быть разработаны для эффективной передачи энергии от робота к человеку. В то же время следует изучить модульные конструкции механизма экзоскелета. Фактически, многие активные ортезы также можно назвать модульными односуставными экзоскелетами.
Для достижения интеграции движения между роботами и пациентами должны быть созданы индивидуальные и персонализированные модели походки. Нормальный режим движения часто требуется в качестве эталона и ввода в систему управления в качестве ожидаемого движения робота, цели обучения и стандарта оценки. Для пациентов с гемиплегией или другими физическими недостатками в реабилитации часто используется заранее определенная траектория. Эти заранее определенные траектории могут быть получены из сбора данных о нормальной походке. Однако из-за ограниченного объема собранных данных полученные данные о движении трудно сопоставить с различными характеристиками движения человеческого тела, и поэтому был предложен метод генерации параметризованного шаблона движения. Однако современные методы планирования и создания походки, основанные на теории управления двуногим роботом и естественной походке человека, не могут обеспечить идеальное соответствие; Генерация походки в основном сосредоточена в сагиттальной плоскости и не учитывает трехмерные характеристики походки человека. Механизм того, как движение и структурные параметры влияют на походку человека, еще полностью не изучен, и, следовательно, трудно реализовать идеальную интеграцию уровней движения.
Мультимодальное слияние информации следует использовать для достижения интеграции движения между людьми и машинами. Текущие исследования конструкции сенсорных систем показывают, что недостаточно измерить информацию о движении робота; вместо этого люди также должны быть включены в систему не только для измерения информации о движении человеческого тела и биологических сигналов, но и для сбора информации о взаимодействии между человеком и силой, прилагаемой роботом. Однако можно представить, что больше информации не всегда лучше, поскольку избыточная информация увеличивает сложность системы и влияет на ее практическое применение. В процессе реабилитационного обучения реабилитационным роботам-экзоскелетам нижних конечностей необходимо участвовать в эффективном динамическом взаимодействии с пациентом. Такой реабилитационный тренинг позволяет эффективно повысить уровень активного участия пациента и значительно усилить реабилитационный эффект. Однако в методике оценки самого робота отсутствует набор системных показателей адаптивности и степени соответствия человеческому телу. Следовательно, необходимо изучать мультимодальную информацию для реализации эффективной интеграции человека и робота.
Ссылки
G L R O Сотрудники. Глобальные, региональные и страновые риски инсульта в течение жизни, 1990 и 2016 гг. . Медицинский журнал Новой Англии , 2018, 379(25): 2429-2437.
Артикул
Google ученый
С. К. Банала, С. Х. Ким, С. К. Агравал и др. Тренировка ходьбы с помощью робота с активным экзоскелетом ноги (ALEX) . IEEE Transactions по нейронным системам и реабилитационной инженерии , 2009, 17(1): 2-8.
Артикул
Google ученый
G Chen, CK Chan, Z Guo, et al. Обзор вспомогательных роботизированных экзоскелетов нижних конечностей в реабилитационной терапии . Критические обзоры биомедицинской инженерии , 2013, 41 (4-5): https://doi.
org/10.1615/critrevbiomedeng.2014010453.Артикул
Google ученый
М. Бернхардт, М. Фрей, Г. Коломбо и др. Гибридное управление силой и положением обеспечивает кооперативное поведение реабилитационного робота LOKOMAT 9.1355 . Международная конференция по реабилитационной робототехнике , 2005: 536-539.
Van Asseldonk E H, Van Der Kooij H. Роботизированная тренировка ходьбы с LOPES . Технология нейрореабилитации, Springer, 2012.
Книга
Google ученый
СТ Алан. Управление и генерация траектории носимого экзоскелета для передвижения пациентов с травмой спинного мозга . Калифорнийский университет, Беркли, 2011 г.
Google ученый
S K Ann. Разработка человеко-машинного интерфейса для носимого экзоскелета для пользователей с нарушениями позвоночника .
Калифорнийский университет, Беркли, 2011 г.Google ученый
Р. Дж. Фаррис, Х. А. Кинтеро, М. Гольдфарб. Предварительная оценка механического ортеза нижних конечностей для помощи при ходьбе у лиц с параличом нижних конечностей . IEEE Transactions по нейронным системам и реабилитационной инженерии , 2011, 19(6): 652-659.
Артикул
Google ученый
G Zeilig, H Weingarden, M Zwecker, et al. Безопасность и переносимость экзоскелетного костюма ReWalk™ для передвижения людей с полным повреждением спинного мозга: пилотное исследование . Журнал медицины спинного мозга , 2012, 35(2): 96-101.
Артикул
Google ученый
J Gancet, M Ilzkovitz, E Motard, et al. MINDWALKER: шаг вперед с помощью вспомогательного экзоскелета нижних конечностей для пациентов с ТСМ .
Международная конференция IEEE RAS & EMBS по биомедицинской робототехнике и биомехатронике , Рим, Италия, 24–27 июня 2012 г.: 17:94–18:00.J Gancet, M Ilzkovitz, G Cheron, et al. MINDWALKER: управляемый мозгом экзоскелет нижних конечностей для реабилитации. Возможные применения в космосе . 11-й симпозиум по передовым космическим технологиям в робототехнике и автоматизации , Нордвейк, Нидерланды, 12–15 апреля 2011 г.: 12–14.
Х. Сато, Т. Кавабата, И. Санкай. Помощь при купании с роботизированным костюмом HAL . Международная конференция IEEE по робототехнике и биомиметике , Гуйлинь, Китай, 18-22 декабря 2009 г.: 498-503.
Х Ян, Си Ян. Дизайн и валидация экзоскелета нижних конечностей с использованием режима лежачей езды на велосипеде для постинсультной реабилитации . Труды Института инженеров-механиков, Часть C: Журнал машиностроения , 2014, 228 (18): 3517-3525.
Google ученый
Ю Мяо, Ф Гао, П Дан. Механическая конструкция гибридного экзоскелета ноги для увеличения несущей способности при ходьбе . Международный журнал передовых робототехнических систем , 2013, 10: https://doi.org/10.5772/57238.
Артикул
Google ученый
P Pei, Z Pei, Z Shi и др. Бездатчиковое управление узлом шарнирного привода экзоскелета нижней конечности с наблюдателем каскадной обратной связи . Математические задачи в технике , 2018, 3029514: 1-11, https://doi.org/10.1155/2018/3029514.
MathSciNet
СтатьяGoogle ученый
Д Лю, З Тан, З Пей. Компенсация переменной структуры ПИД-управление асимметричным отслеживанием траектории гидроцилиндра . Математические задачи в технике , 2015, 8
: 1-9.
https://doi.org/10.1155/2015/8.
MathSciNet
МАТЕМАТИКА
СтатьяGoogle ученый
М. Лю, В. Чен, С. Дин и др. Разработка экзоскелета нижних конечностей, созданного на основе биологических материалов, для реабилитации человека при ходьбе. Review of Scientific Instruments , 2016, 87(10): 104301.
Статья
Google ученый
Р. Хуан, Х. Ченг, Х. Го и др. Иерархический контроль обучения с физическим взаимодействием человека и экзоскелета . Информатика , 2018, 432: 584-595.
Артикул
Google ученый
R Huang, H Cheng, Y Chen, et al. Оптимизация эталонной траектории ходьбы экзоскелета нижней конечности . Международный журнал социальной робототехники , 2016, 8(2): 223-235.
Артикул
Google ученый
Д.
Ван, К. Ли, Дж. Джи. Экзоскелет нижней конечности с пассивной опорой на ходьбе и эластичными суставами . IEEE Transactions on Robotics , 2016, 32(4): 933-942.Артикул
Google ученый
X Wu, D Liu, M Liu, et al. Генерация индивидуальной схемы походки для совместного использования робота-экзоскелета нижних конечностей . IEEE Transactions on Automation Science and Engineering , 2018, 15(4): 1459-1470.
Артикул
Google ученый
C Chen, X Wu, D Liu, et al. Дизайн и оценка намерения произвольного движения нового носимого гибкого робота-экзоскелета всего тела . Мобильные информационные системы , 2017 г.: https://doi.org/10.1155/2017/8682168.
Google ученый
Д А Нойманн. Кинезиология опорно-двигательного аппарата: основы реабилитации .
Elsevier Health Sciences, 2013.Дж. Э. Мусколино. Кинезиология: Скелетная система и функция мышц . Elsevier Medicine, 2011.
А. Д. Куо. Шесть определяющих факторов походки и аналогия с перевернутым маятником: перспектива динамической ходьбы . Наука о движении человека , 2007, 26(4): 617-656.
Артикул
Google ученый
Э. Ф. Чехаб, Т. П. Андриакки, Дж. Фавр. Скорость, возраст, пол и индекс массы тела обеспечивают строгую основу для сравнения кинематического и кинетического профилей нижних конечностей при ходьбе . Журнал биомеханики , 2017, 58: 11-20.
Артикул
Google ученый
Дж. В. Квон, С. М. Сон, Н. К. Ли. Изменения кинематических параметров нижних конечностей в зависимости от скорости ходьбы: исследование трехмерного анализа движений .
Journal of Physical Therapy Science , 2015, 27(2): 477-479.Артикул
Google ученый
С. Аль-Обайди, Дж. К. Уолл, А. Аль-Якуб и др. Основные параметры походки: сравнение справочных данных для здоровых людей в возрасте от 20 до 29 лет из Кувейта и Скандинавии . Журнал реабилитационных исследований и разработок , 2003, 40(4): 361-366.
Артикул
Google ученый
Т. Дж. Каннингем. Трехмерный количественный анализ траектории стопы при беге. University of Kentucky, 2007.
JL Lelas, GJ Merriman, PO Riley, et al. Прогнозирование пиковых кинематических и кинетических параметров по скорости ходьбы . Походка и осанка , 2003, 17(2): 106-112.
Артикул
Google ученый
Б. Купман, Э.
Ван Ассельдонк, Х. Ван дер Коой. Генерация опорной траектории сустава в зависимости от скорости для роботизированной поддержки ходьбы . Журнал биомеханики , 2014, 47(6): 1447-1458.Артикул
Google ученый
М. Хэнлон, Р. Андерсон. Методы прогнозирования для учета влияния скорости ходьбы на угловую кинематику нижних конечностей . Походка и осанка , 2006, 24(3): 280-287.
Артикул
Google ученый
С. Ко, С. Стенхольм, Л. Ферруччи. Характерные паттерны походки у пожилых людей с ожирением — результаты лонгитюдного исследования старения в Балтиморе . Журнал биомеханики , 2010, 43(6): 1104-1110.
Артикул
Google ученый
A B Zoss, H Kazerooni, et al. Биомеханический дизайн экзоскелета нижней конечности Беркли (BLEEX) .
IEEE/ASME Transactions on Mechatronics , 2006, 1(2): 128-138.Артикул
Google ученый
С.К. Банала, С.К. Агравал, С.Х. Ким и др. Новая адаптация походки и результаты нейромоторной тренировки с использованием активного экзоскелета ноги. Мехатроника , 2010, 15(2): 216-225.
Google ученый
R Riener, L Lunenburger, S Jezernik, et al. Стратегии сотрудничества пациентов при роботизированной беговой дорожке: первые экспериментальные результаты . IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2005, 13(3): 380-394.
Артикул
Google ученый
J Meuleman, E Van Asseldonk, G Van Oort, et al. LOPES II — разработка и оценка тренировочного робота с управляемой походкой и подходом «теневая нога» . IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2016, 24(3): 352-363.
Артикул
Google ученый
Р. Эккеленкамп, Дж. Венеман, Х. Ван дер Коой. LOPES: Избирательный контроль функций походки во время восстановления ходьбы у пациентов с сердечно-сосудистыми заболеваниями . Международная конференция по реабилитационной робототехнике , Чикаго, Иллинойс, США, 28 июня — 1 июля 2005 г.: 361-364.
Н. Квак, К. Мюллер, С. Ли. На пути к управлению экзоскелетом на основе стационарных зрительных вызванных потенциалов . Международный зимний семинар по интерфейсу мозг-компьютер (BCI) , провинция Канвондо, Корея (Юг), 17-19 февраля, 2014: 1-2.
А. Цукахара, Ю. Хасэгава, К. Эгучи и др. Восстановление походки у больных с травмой спинного мозга с помощью hal с оценщиком намерения для предпочтительной скорости маха . IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2015, 23(2): 308-318.
Артикул
Google ученый
М Уиттл. Анализ походки: введение . Баттерворт-Хайнеманн, 2014.
Дж. Х. Холлман, М. К. Уоткинс, А. С. Имхофф и др. Сравнение изменчивости пространственно-временных параметров ходьбы при беговой дорожке и при ходьбе по земле . Походка и осанка , 2016, 43: 204-209.
Артикул
Google ученый
С. Дж. Ли, Дж. Хидлер. Биомеханика ходьбы по земле и беговой дорожке у здоровых людей . Журнал прикладной физиологии , 2008, 104(3): 747-755.
Артикул
Google ученый
Дж. Мерхольц, Л. А. Харви, С. Томас и др. Является ли тренировка на беговой дорожке с поддержкой веса тела или тренировка ходьбы с помощью робота более эффективной, чем тренировка ходьбы по земле и другие формы физиотерапии у людей с травмой спинного мозга? Систематический обзор.
Спинной мозг , 2017, 55(8): 722-729.Артикул
Google ученый
С. Шривастава, П. Као, С. Х. Ким и др. Обучение ходьбе с помощью робота «помощь по мере необходимости» улучшает функцию ходьбы у людей после инсульта . IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2015, 23(6): 956-963.
Артикул
Google ученый
T Senthilvelkumar, H Magimairaj, J Fletcher, et al. Сравнение тренировок на беговой дорожке с поддержкой веса тела и наземных тренировок с поддержкой веса тела у людей с неполной тетраплегией: пилотное рандомизированное исследование. Клиническая реабилитация , 2015, 29(1): 42-49.
Артикул
Google ученый
М. Алкобендасмаэстро, А. Эскларинрус, Р. М. Касадолопес и др. Роботизированная тренировка Lokomat по сравнению с наземной тренировкой в течение 3-6 месяцев после неполного поражения спинного мозга: рандомизированное контролируемое исследование.
Нейрореабилитация и восстановление нервной системы , 2012, 26(9): 1058.Статья
Google ученый
С. А. Грэм, С. П. Хёрт, Д. А. Браун. Сведение к минимуму требований к осанке при ходьбе с акцентом на генерацию локомоторной силы для здоровых людей. IEEE Transactions on Neural Systems and Rehabilitation Engineering: Публикация IEEE Engineering in Medicine and Biology Society , 2018, 26(5): 1003-1010.
Артикул
Google ученый
В. К. Дионисио, К. П. Хёрт, Д. А. Браун. Влияние направленной вперед вспомогательной силы на механику походки у здоровых молодых людей при более быстрой ходьбе . Походка и осанка , 2018, 64: 12-17.
Артикул
Google ученый
Дж. Паттон, Д.А. Браун, М. Пешкин и др. KineAssist: проектирование и разработка роботизированного наземного устройства для терапии ходьбы и равновесия .
Topics in Stroke Rehabilitation , 2008, 15(2): 131-139.Артикул
Google ученый
Д. Занотто, П. Стегалл, С. К. Агравал. ALEX III: новая роботизированная платформа с 12 степенями свободы для тренировки ходьбы человека . Международная конференция IEEE по робототехнике и автоматизации , Карлсруэ, Германия, 2013, 2013: 3914-3919.
Google ученый
Ю Ю, В Лян. Принцип включения манипулятивности для оптимизации конструкции вспомогательного механизма тазобедренного сустава. Международный журнал передовых производственных технологий , 2014, 70(5-8): 929-945.
Артикул
Google ученый
W Zhang, S Zhang, M Ceccarelli, et al. Дизайн и кинематический анализ нового метаморфического механизма для реабилитации нижних конечностей .
Спрингер, Чам, 2016.Книга
Google ученый
В. Чжан, В. Чжан, Д. Ши и др. Разработка асимметричного параллельного механизма ассистента тазобедренного сустава и оптимизация свободного от сингулярности рабочего пространства . Механизм и теория машин , 2018, 122: 389-403.
Артикул
Google ученый
D Wang, K Lee, J Guo, et al. Адаптивный экзоскелет коленного сустава на основе биологической геометрии. IEEE/ASME Transactions on Mechatronics , 2014, 19(4): 1268-1278.
Артикул
Google ученый
Б. Т. Куинливан, С. Ли, П. Малкольм и др. Величина помощи по сравнению со снижением метаболических затрат для привязного многосуставного мягкого экзокостюма . Научная робототехника , 2017, 2(2): 1-10.
Артикул
Google ученый
С.
А. Колаковски-Хайнер, Дж. Крю, С. Моран и др. Безопасность и целесообразность использования бионического экзоскелета «ЭксоТМ» для облегчения передвижения после травмы спинного мозга . Журнал Spine , 2013, 4: 1-8.Google ученый
Дж. Хидлер, В. Висман, Н. Неккель. Кинематические траектории при ходьбе в роботизированной походке-ортезе Lokomat . Клиническая биомеханика , 2008, 23(10): 1251-1259.
Артикул
Google ученый
Х. Вэллери, Дж. Венеман, Э. Ван Асселдонк и др. Соответствующее срабатывание реабилитационных роботов . Журнал IEEE Robotics & Automation , 2008, 15(3): 60-69.
Артикул
Google ученый
JE Pratt, BT Krupp, CJ Morse, et al. RoboKnee: экзоскелет для повышения силы и выносливости при ходьбе . Материалы Международной конференции IEEE по робототехнике и автоматизации , Новый Орлеан, Луизиана, США, 26 апреля — 1 мая 2004 г.
: 2430-2435.H Yu, S Huang, G Chen, et al. Управление взаимодействием человека и робота реабилитационных роботов с последовательными упругими приводами . Робототехника, IEEE Transactions on ., 2015, 31(5): 1089-1100.
Артикул
Google ученый
Э Сарийылдиз, Г Чен, Х Ю. Надежный контроллер движения, основанный на ускорении, для упругого привода новой серии. IEEE Transactions on Industrial Electronics , 2016, 63(3): 1900-1910.
Артикул
Google ученый
Х. Вэллери, Р. Бургкарт, К. Хартманн и др. Дополнительная оценка движений конечностей для управления активными протезами коленного сустава . Биомедицинская техника/Биомедицинская инженерия , 2011, 56(1): 45-51.
Артикул
Google ученый
К.
Со, И. Пак, С. Юн и др. Генерация модели ходьбы для роботизированной системы реабилитации ходьбы на беговой дорожке . 14-я Международная конференция по управлению, автоматизации и системам , KINTEX, Кёнгидо, Корея, 22-25 октября 2014 г.: 1090-1094.Х. Б. Лим, Т. П. Луу, К. Х. Хун и др. Прогноз параметров естественной походки для реабилитации походки с помощью искусственной нейронной сети . Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , Тайбэй, Тайвань, Китай, 18-22 октября 2010 г.: 5398-5403.
Л. Ван, Э. Х. ван Ассельдонк, Х. ван дер Коой. Генерация модели походки на основе прогнозирующего управления для носимых экзоскелетов . Международная конференция IEEE по реабилитационной робототехнике , ETH Zurich Science City, Швейцария, 29 июня — 1 июля 2011 г.: 1-6.
M R Tucker, J Olivier, A Pagel, et al. Стратегии контроля при активном протезировании и ортопедии нижних конечностей: обзор .
Журнал нейроинженерии и реабилитации , 2015, 12(1): 1-30.Артикул
Google ученый
С. Маджони, Л. Люненбургер, Р. Ринер и др. Роботизированная оценка функции ходьбы на основе адаптивного алгоритма . Международная конференция IEEE по реабилитационной робототехнике , Сингапур, 11–14 августа 2015 г.: 804–809.
Google ученый
Б. Купман, Э. Х. ван Ассельдонк, Х. ван дер Коой. Избирательный контроль подзадач походки при обучении роботизированной ходьбе: поддержка просвета стопы у выживших после инсульта с помощью экзоскелета с электроприводом . Журнал нейроинженерии и реабилитации , 2013, 10(3): 1-21.
Google ученый
X Jin, X Cui, S K Agrawal. Разработка активного экзоскелета ноги с тросовым приводом (C-alex) и эксперименты по тренировке ходьбы с людьми .
Международная конференция IEEE по робототехнике и автоматизации , Сиэтл, Вашингтон, США, 26-30 мая 2015 г.: 5578-5583.О Хариб, А. Херейд, А. Агравал и др. Управление экзоскелетом для паралича нижних конечностей с обратной связью: к стабильной динамической ходьбе без помощи рук . Журнал IEEE Control Systems , 2018, 38(6): 61-87.
MathSciNet
СтатьяGoogle ученый
Т. Лензи, М. К. Карроцца, С. К. Агравал. Экзоскелеты бедра с электроприводом могут уменьшить активацию мышц бедра и лодыжки пользователя во время ходьбы . IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2013, 21(6): 938-948.
Артикул
Google ученый
Д. Б. Файнберг, П. Асселин, Н. Ю. Харел и др. Анализ вертикальной опорной реакции при ходьбе с помощью экзоскелета у лиц с полной двигательной параплегией .
Журнал медицины спинного мозга , 2013, 36(4): 313-321.Артикул
Google ученый
П.К. Джамвал, С.К. Се, С.Хусейн и др. Адаптивный носимый параллельный робот для лечения травм голеностопного сустава . IEEE/ASME Transactions on Mechatronics , 2014, 19(1): 64-75.
Артикул
Google ученый
С. Хуссейн, С. К. Се, П. К. Джамвал. Надежное нелинейное управление внутренне совместимым роботизированным ортезом для тренировки ходьбы . Транзакции IEEE по системам, человеку и кибернетике: системы , 2013, 43(3): 655-665.
Артикул
Google ученый
Z Tang, D Shi, D Liu, et al. Электрогидравлическая сервосистема для экзоскелета нижних конечностей человека, основанная на управлении переменной структурой скользящего режима . Информация и автоматизация (ICIA), 2013 г.
Международная конференция IEEE по , 2013 г.: 559-563.J Pratt, C Chew, A Torres, et al. Управление виртуальной моделью: интуитивно понятный подход к двуногому передвижению . Международный журнал исследований робототехники , 2001, 20(2): 129-143.
Артикул
Google ученый
Т. Ленци, С. М. Де Росси, Н. Витьелло и др. Управление ЭМГ на основе намерения для экзоскелетов с электроприводом . IEEE транс. Biomed Eng ., 2012, 59(8): 2180-2190.
Артикул
Google ученый
Х Хе, К Кигути. Исследование управления роботами-экзоскелетами на основе ЭМГ для помощи при движении нижних конечностей человека . Приложения информационных технологий в биомедицине, 2007. ITAB 2007. 6-я Международная специальная тематическая конференция по , 2007: 292-295.
П.
Као, К. Льюис, Д. П. Феррис. Инвариантные паттерны момента в лодыжке при ходьбе с роботизированным экзоскелетом лодыжки и без него . Журнал биомеханики , 2010, 43(2): 203-209.Артикул
Google ученый
Д. П. Феррис, К. Э. Гордон, Г. С. Савицки и др. Усовершенствованный ортез голеностопного сустава с электроприводом, использующий пропорциональный миоэлектрический контроль . Походка и осанка , 2006, 23(4): 425-428.
Артикул
Google ученый
А. Р. Донати, С. Шокур, Э. Мория и др. Длительная тренировка с протоколом ходьбы на основе интерфейса мозг-машина вызывает частичное неврологическое восстановление у пациентов с параличом нижних конечностей . Научные отчеты , 2016, 6: 30383.
Статья
Google ученый
Д. Лю, В.
Чен, З. Пей и др. Управляемый мозгом экзоскелет нижних конечностей для тренировки ходьбы человека . Review of Scientific Instruments , 2017, 88(10): 104302.Статья
Google ученый
Н. Квак, К. Мюллер, С. Ли. Система управления экзоскелетом нижних конечностей на основе стационарных зрительных вызванных потенциалов . Journal of Neural Engineering , 2015, 12(5): 56009.
Статья
Google ученый
R Xu, N Jiang, N Mrachacz-Kersting, et al. Замкнутый интерфейс мозг-компьютер, запускающий активный ортез на лодыжку и стопу для индукции пластичности нейронов коры головного мозга. IEEE Transactions on Biomedical Engineering , 2014, 61(7): 2092-2101.
Артикул
Google ученый
Г Агирре-Оллингер, У Нагараджан, А Госвами.
Контроллер формирования адмиттанса для экзоскелетной поддержки нижних конечностей . Автономные роботы , 2016, 40(4): 701-728.Артикул
Google ученый
H Ding, X Yang, N Zheng, et al. Tri-Co Robot: китайская инициатива по исследованию роботов для расширения возможностей взаимодействия с роботами. National Science Review , 2017, 5(6): 799-801.
Артикул
Google ученый
Ссылки на скачивание
Вклад авторов
XD руководил всем испытанием; DS написал рукопись; WXZ и WZ помогли со структурой и языком рукописи. Все авторы прочитали и одобрили окончательный вариант рукописи.
Информация об авторах
Ди Ши, 1988 года рождения, в настоящее время кандидат наук в возрасте 9 лет.1355 Институт робототехники, Бейханский университет, Китай . Он получил степень бакалавра в Уханьском технологическом университете, Китай, , в 2011 году. И он получил степень магистра в Бейханском университете, Китай, , в 2014 году. Его исследовательские интересы включают управление носимыми роботами для реабилитации нижних конечностей.
Усян Чжан, 1978 года рождения, в настоящее время является адъюнкт-профессором в Школе машиностроения и автоматизации , Бейханский университет, Китай . Получил степень доктора философии в Beihang University, China , 2009 г. Его исследовательские интересы включают динамику совместимых механических систем и роботов, интеллектуальные устройства и технологии обнаружения.
Вэй Чжан, 1986 года рождения, в настоящее время кандидат наук в Институте робототехники , Бейханский университет, Китай . Он получил степень бакалавра в Северо-Западном политехническом университете , Китай, , в 2009 году. Его исследовательские интересы включают механическое проектирование носимых роботов.
Силун Дин, 19 г.р.67 лет, в настоящее время является профессором и руководителем кандидата наук в Школе машиностроения и автоматизации , Бэйханский университет, Китай . Он получил степень доктора философии в Харбинском технологическом институте , Китай, , в 1997 году. Его исследовательские интересы включают динамику податливых механических систем и роботов, неголономное управление космическими роботами, динамику и управление воздушными роботами, а также биомиметические роботы.
Благодарности
Авторы искренне благодарят г-на Чуна Ци и Исина Шао из Университета Бэйхан за их критические обсуждения и чтение во время подготовки рукописи.
Конкурирующие интересы
Авторы заявляют, что у них нет конкурирующих интересов.
Финансирование
При поддержке Национальной ключевой программы исследований и разработок Китая (грант № 2016YFE0105000) и Национального фонда естественных наук Китая (грант № 104).
Информация об авторе
Авторы и организации
Школа машиностроения и автоматизации, Университет Бейхан, Пекин, 100191, Китай
Ди Ши, Усян Чжан, Вэй Чжан и Силун Дин
Пекинговой инновационный центр по биомедицинской инженерии, Университет Бейханга, Пекин, 100191, Китай
Di Shi, Wuxiang Zhang, Wei Zhang & Xilun Ding
9003
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 9000.
923. также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Академия
Посмотреть публикации автора
Вы также можете искать этого автора в
PubMed Google Scholar
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Автор, ответственный за переписку
Усян Чжан.
Права и разрешения
Открытый доступ Эта статья распространяется в соответствии с условиями международной лицензии Creative Commons Attribution 4.0 (http://creativecommons.org/licenses/by/4.0/), которая разрешает неограниченное использование, распространение, и воспроизведение на любом носителе, при условии, что вы укажете автора(ов) оригинала и источник, предоставите ссылку на лицензию Creative Commons и укажете, были ли внесены изменения.
Перепечатка и разрешения
Об этой статье
Подшипник Reali-Slim® тонкого сечения для ноги экзоскелета
‘;
}
};
Служба поддержки клиентов | |||
< предыдущий | следующий > | Экзоскелет «VariLeg» — тонкостенные подшипники Kaydon обеспечивают компактную и легкую конструкциюРазработка швейцарского университета ETH Zurich предлагает помощь параличу нижних конечностей Сложные устройства, известные как экзоскелеты, являются предметом интенсивных научных исследований во всем мире. Одной из наиболее сложных является VariLeg (нога с переменным сопротивлением), цель которой — позволить парализованным людям ходить прямо и без посторонней помощи. Устройство в настоящее время разрабатывается в ETH Zurich, университете науки и технологий в Швейцарии, под эгидой проекта VariLeg. VariLeg реализует концепцию переменной жесткости в виде системы MACCEPA (механически регулируемый привод податливости и управляемого положения равновесия), встроенной в верхнюю часть ноги. Пластина, соединенная с голенью с помощью двигателя, обеспечивает вращение и свободно вращается на верхней части ноги. Компактный подшипник для редуктора «По сравнению с первой версией прототипа VariLeg мы хотели уменьшить ширину системы в области бедра», — объясняет Янник Обербек, руководитель проекта VariLeg. «Поэтому в самом начале проекта мы начали искать подшипник наименьшего возможного размера для редуктора». В конечном итоге команда остановила свой выбор на тонкостенных метрических подшипниках Reali-Slim® производства Kaydon. Небольшой вес подшипников и большой внутренний диаметр при минимальном занимаемом пространстве сделали их идеальным выбором для этого применения. В экзоскелете VariLeg установлены два тонкостенных подшипника, по одному в каждом коленном суставе. Редуктор с двигателем установлен таким образом, чтобы свободно перемещаться в каждом колене. Этот узел подвергается относительно большим нагрузкам, которые воспринимаются подшипниками на обоих концах. С одной стороны зацепление соединено с валом, что означает возможность использования подшипниковой системы на основе обычного шарикоподшипника. «Чтобы получить максимально компактную и легкую конструкцию с другой стороны, необходимо было использовать тонкостенный подшипник с большим внутренним диаметром», — говорит Обербек. «Это позволило создать систему подшипников для редуктора, которая не требовала сложных, занимающих много места вспомогательных конструкций». Тонкостенные подшипники в широком диапазоне конфигурацийПодшипники тонкого сечения отличаются малым поперечным сечением и очень большим диаметром отверстия. Их можно использовать для создания компактных и легких подшипников, которые также оставляют место для тросов или валов, проходящих через отверстие. Отрасли промышленности, включая робототехнику, полупроводники и медицинскую технику, находят тонкостенные подшипники идеальными для ряда применений. Ассортимент продукции Kaydon включает 250 различных тонкостенных подшипников серии Reali-Slim® как дюймовых, так и метрических размеров. Четырехточечные подшипники, рассчитанные на различные виды нагрузки В приложении VariLeg используются четырехточечные подшипники типа X. Во многих случаях один подшипник типа X может заменить два обычных подшипника, что делает их предпочтительным подшипником, когда невозможно установить пару подшипников типа A. «Четырехточечные подшипники рассчитаны на огромное разнообразие различных нагрузок», — объясняет Ульрих Шрот, руководитель бизнес-подразделения продуктов с добавленной стоимостью компании Rodriguez, немецкого дистрибьютора Kaydon. Новый прототип VariLeg в настоящее время находится на стадии испытаний. Бывший пилот с параличом нижних конечностей тренируется с экзоскелетом, преследуя амбициозную цель — участвовать в кибатлоне в Цюрихе, мероприятии, в котором участники с ограниченными физическими возможностями соревнуются в шести чрезвычайно сложных дисциплинах. | | |
Power walk – @theU
Стэн Шаар, потерявший левую ногу в результате несчастного случая, когда помогал соседу, никогда не думал, что снова почувствует ощущение легкой ходьбы на двух здоровых ногах.
Затем он надел новый экспериментальный экзоскелет, разработанный инженерами-механиками из лаборатории бионической инженерии Университета Юты.
«Мне казалось, что позади меня дует сильный ветер, толкая меня по дороге», — сказал 74-летний мужчина из округа Солт-Лейк, штат Юта, об использовании нового устройства.
Шаар был одним из полудюжины людей с ампутированными нижними конечностями, которые тестировали новый экзоскелет, разработанный группой исследователей Университета Юты под руководством доцента машиностроения Томмазо Ленци.
Экзоскелет, который обвивается вокруг талии и ноги владельца, использует электродвигатели с батарейным питанием и встроенные микропроцессоры, позволяющие человеку с ампутированной конечностью ходить с гораздо меньшими усилиями.
Исследование группы было задокументировано в новой статье, опубликованной в журнале Nature Medicine. Помимо Ленци, соавторами статьи являются аспиранты Университета машиностроения Маршалл К. Измаил и Данте А. Архангели. Вы можете прочитать газету здесь.
Снижение качества жизни
Ампутация выше колена серьезно снижает подвижность и качество жизни миллионов людей, в значительной степени из-за того, что во время операции удаляется большая часть мышц ноги.
«Следствием этого, несмотря на то, что у вас есть возможность двигать бедром, ваши способности ходить сильно ухудшаются», — сказал Ленци. «Не хватает силы и диапазона движений».
Стандартный протез ноги для людей с ампутированными конечностями не может полностью воспроизвести биомеханические функции человеческой ноги. Следовательно, люди с ампутированными конечностями выше колена работают тяжелее при ходьбе, перенапрягая мышцы культи и неповрежденной конечности, чтобы компенсировать недостаток энергии от протеза.
Целью экзоскелета Лензи является обеспечение дополнительной энергией, чтобы ходьба снова казалась естественной. Устройство оснащено легким и эффективным электромеханическим приводом, который крепится к бедру пользователя над местом ампутации. Ремни вокруг талии содержат специальные электронные системы, микроконтроллеры и датчики, работающие с усовершенствованными алгоритмами управления. «ИИ экзоскелета понимает, как человек двигается, и помогает ему двигаться», — сказал Архангели. Привод можно поменять местами между правой и левой сторонами основной привязи, чтобы приспособить любую ногу.
Как электрический велосипед
В отличие от силового костюма, который придает супергерою Marvel Железному человеку дополнительную силу, или других костюмов-экзоскелетов, которые помогают рабочим поднимать тяжелые грузы, экзоскелет Ленци дает пользователю достаточно дополнительной силы для ходьбы. Профессор сравнивает его с электрическим велосипедом с двигателем, который помогает водителю крутить педали велосипеда в гору.
Группа исследователей провела исследование, в ходе которого шесть человек с ампутацией выше колена протестировали экзоскелет, в то время как скорость их метаболизма записывалась. Пациенты ходили по беговой дорожке с включенным устройством и без него, в то время как их потребление кислорода и уровень углекислого газа измерялись.
У всех тех, кто тестировал экзоскелет, улучшилась скорость метаболизма, другими словами, снизилось потребление энергии, в среднем на 15,6% с ним, сказал Лензи.
«Это равносильно снятию 26-фунтового рюкзака. Это действительно большое улучшение», — сказал он. «Мы очень близки к тому, что средний человек потратил бы при той же скорости. Метаболическое потребление почти неотличимо от потребления здорового человека, в зависимости от уровня физической подготовки».
Другим ключевым фактором является то, что это устройство уникально легкое, сказал Лензи. Рама изготовлена из углеродного волокна, а остальные детали изготовлены из композитного пластика и алюминия. В целом экзоскелет весит всего 5,4 фунта.
«Прогулка на мили»
ФОТО ПРЕДОСТАВЛЕНО: Дэн Хиксон/Инженерный колледж Университета Юты
Доцент машиностроения Университета Юты Томмазо Лензи (слева) помогает Алеку МакМоррису надеть экспериментальный экзоскелет, разработанный Лензи для пациентов с ампутацией нижних конечностей. Легкий экзоскелет с электроприводом позволяет пользователям ходить с гораздо меньшими усилиями благодаря ряду двигателей, микропроцессоров и передовых алгоритмов.
Загрузить изображение в полном разрешении
По его словам, для Шаара опыт использования экзоскелета был максимально близок к его человеческой ноге.
«В первый раз, когда я использовал его, казалось, что мои мышцы полностью слились с этим экзоскелетом, и это помогло им двигаться быстрее», — сказал отставной компьютерный администратор. «Это помогло моей ноге расслабиться и просто двигаться вперед и ходить. Я, наверное, мог бы пройти много миль с этой штукой, потому что она помогала моим мышцам двигаться».