Содержание
Экзоскелет своими руками (видео)
Если вы считаете, что только военные и другие мегакорпорации могут создавать экзоскелеты, то ошибаетесь. Для этого нужно всего лишь несколько стандартных деталей и умение их соединить. James Hobson, так же известный как The Hacksmith, в домашних условиях разработал подобное устройство, пневматика которого позволяют ему с относительной лёгкостью поднимать почти 80 килограмм бетонных блоков. Учитывая, что в изобретении используется старый компрессор, который держит лишь половину давления, реальные возможности аппарата можно умножать на два. Если вы хотите сделать нечто подобное самостоятельно, то инструкцию для этого можно найти на сайте автора, только стоит учесть, что у этого экзоскелета нет усиления для ног поэтому весь вес, который поднимает Джеймс, фактически, удерживается его позвоночником.
Источник: thehacksmith
Самодельный экзоскелет помог поднять авто (видео)
Канадский изобретатель Джеймс Хобсон, называющий себя The Hacksmith, одержим разработкой собственных экзоскелетов. В 2014 году, вдохновленный фильмом «Элизиум», инженер смастерил плечевой экзоскелет, который позволил ему с лёгкостью поднять штангу весом 124 килограмма. На этот раз Джеймс спроектировал экзоскелет, закрепляющийся на нижней части тела. С его помощью подъём автомобиля Mini Cooper весом 1 144 кг не является чем-то сверхъестественным. В будущем инженер намерен доработать свои экзоскелеты, чтобы найти им практическое применение в повседневной жизни.
В 2014 году, вдохновленный фильмом «Элизиум», инженер смастерил плечевой экзоскелет, который позволил ему с лёгкостью поднять штангу весом 124 килограмма. На этот раз Джеймс спроектировал экзоскелет, закрепляющийся на нижней части тела. С его помощью подъём автомобиля Mini Cooper весом 1 144 кг не является чем-то сверхъестественным. В будущем инженер намерен доработать свои экзоскелеты, чтобы найти им практическое применение в повседневной жизни.
Источник: venturebeat.com
Появилась искусственная нога с открытым исходным кодом (видео)
Ученые из США разработали протез с открытым исходным кодом, который весит всего 4 кг. Из-за открытой лицензии стоимость устройства стала втрое дешевле.
Исследователи объяснили, что колени, лодыжки и ноги, находящиеся в стадии разработки во всем мире, чтобы помочь пациентам ходить, оснащены электродвигателями. Для получения максимальной отдачи от такого мощного протезирования требуются безопасные и надежные системы управления, которые могут учитывать множество различных типов движений: например, переход от шагания по ровной земле к хождению вверх или вниз по пандусам или лестницам.
Для получения максимальной отдачи от такого мощного протезирования требуются безопасные и надежные системы управления, которые могут учитывать множество различных типов движений: например, переход от шагания по ровной земле к хождению вверх или вниз по пандусам или лестницам.
Для решения этой проблемы ученые разработали устройство под названием Open Source Leg. Они подробно рассказали о результатах своих исследований в журнале Nature Biomedical Engineering. Сопровождающие искусственную конечность бесплатные пошаговые руководства призваны помочь исследователям, желающим собрать ее или заказать для нее детали. Исследователи также выпустили видеоматериалы, иллюстрирующие процесс сборки и тестирования аппаратуры, а также разработали код для программирования ходьбы протеза с помощью системы предварительного контроля.
Бионическая нога, которую они разработали, весит всего 4 кг. Хотя она значительно легче биологической ноги, для пациентов она все же кажется тяжелее, потому что они прикрепляется не вплотную к скелету, а к протезному изделию. Устройство с открытым исходным кодом стоит от 10 до 30 тыс. долларов, в зависимости от варианта. Коммерчески доступные протезы с питанием стоят до 100 тыс. долларов, отмечают исследователи.
Устройство с открытым исходным кодом стоит от 10 до 30 тыс. долларов, в зависимости от варианта. Коммерчески доступные протезы с питанием стоят до 100 тыс. долларов, отмечают исследователи.
К окончанию своего исследования ученые провели клинические испытания Open Source Leg с тремя добровольцами. Когда они носили новое устройство в больничной обстановке, они смогли достичь целей, поставленных физиотерапевтами — ходили вверх и вниз и отметили, что устройство дает им ощущение поддержки, отзывчивости и плавности.
VR-ботинки Ekto One позволят ходить, оставаясь на месте (видео)
Игры в виртуальной реальности вызывают массу положительных эмоций, однако перемещение в них сопряжено с определенными проблемами: виртуальный персонаж может стремительно двигаться, в то время как сам игрок остается на месте.
Подобное несоответствие приводит к укачиванию, а для тех, кто перемещается в реальном мире по-настоящему, существует опасность столкнуться с препятствиями. В большинстве игр, включая Half-Life: Alyx, используется эффект телепортации, когда игроки мгновенно перемещаются с одного места на другое.
В большинстве игр, включая Half-Life: Alyx, используется эффект телепортации, когда игроки мгновенно перемещаются с одного места на другое.
Есть несколько способов решить эту проблему – правда, далеко не всегда комфортных для пользователей. Американский стартап Ekto VR представил свой новый продукт Ekto One – пару легких роботизированных ботинок с двумя вращающимися пластинами в нижней части.
Когда игрок движется вперед, ботинки скользят в обратном направлении, удерживая его на одном месте, как при надетых роликовых коньках. Ekto One также оснащены набором тормозов, которые активируются, когда пользователь стоит на месте, чтобы не дать ему упасть.
На представленном видео устройство выглядит весьма впечатляюще, однако не обошлось и без недостатков. Пользователю приходится двигаться очень медленно (не понятно, как сочетать это, к примеру, с FPS-играми). Действительно, не так-то просто без соответствующих навыков передвигаться по комнате в громоздких роботизированных ботинках с двумя контроллерами в руках и VR-шлемом на голове.
Тем не менее, у Ekto One есть коммерческие перспективы. Устройство ориентировано на корпоративных пользователей, поэтому его серийную версию в течение двух-четырех лет ожидает дальнейшая проработка.
Источник — UploadVR
Военные США продемонстрировали боевой дрон Гремлин X-61A (видео)
Основным способом использования беспилотных летательных аппаратов в военной доктрине ВВС США в ближайшем будущем станет совместный полет роя дронов. Первое реальное летное испытание дрона по проекту Gremlins («Гремлины») было осуществлено в ноябре 2019 года.
Теперь военные США представили видео тестового полета многоцелевого дрона X-61A, изготовленного фирмой Dynetics. По заверению военных летательный аппарат провел в воздухе 1 час и 41 минуту. Всего было испытано пять беспилотных летательных аппаратов X-61A, один из которых, по сведениям, полученным журналистами, разбился.
На представленном армией США видео беспилотник выпускается с транспортного самолета C-130 Hercules. Тактика использования дронов по проекту «Гремлины», предусматривает групповые полеты роя дронов, которые запускаются вне зоны действия вражеской системы противовоздушной обороны. По завершении миссии БЛА должны возвращаться на базовый самолет. Разработчики заверяют, что дроны X-61A способны развивать скорость до 0,8 Маха.
Создан беспилотник-камикадзе для уничтожения дронов (видео)
Рынок беспилотных летательных аппаратов наполнен самыми разнообразными типами устройств, поэтому компания AerialX из Канады, начавшая свою деятельность с производства обычных квадрокоптеров, приняла решение перепрофилироваться на дроны с оригинальными функциями. Беспилотники AerialX отныне предназначены для уничтожения своих собратьев. Прототип представляет собой гибрид ракеты и квадрокоптера.
Небольшой дрон, вес которого составляет всего один килограмм, может определить в воздухе цель и, развив скорость до 350 км/ч,уничтожить его ценой собственной жизни. В корпус беспилотника AerialX встроены несколько камер, способных сканировать окружающее пространство, определять траекторию и скорость движения к цели для гарантированного уничтожения «вражеского» дрона.
К борьбе с разными беспилотниками дрон-камикадзе подходит индивидуально: малые цели уничтожаются снизу, а чтобы сбить крупный беспилотник выполняется специальный маневр для атаки сверху.
Новая разработка предназначена для специальных служб, военных и охраны аэропортов. В настоящее время после нескольких лет тестирования дроны готовы к массовому производству и смогут решить многие проблемы, возникающие с незаконным использованием беспилотников на запретных территориях.
Источник: digitaltrends.com
Оборонная компания Великобритании показала войну будущего (видео)
BAE Systems, оборонная компания из Великобритании, предложила необычный концепт гибридного дрона для военных. Он будет способен взмывать с особого шеста, а выполнив задачу, вновь на него усаживаться.
Он будет способен взмывать с особого шеста, а выполнив задачу, вновь на него усаживаться.
Инженеры компании разработали беспилотник по принципу «летающего крыла». Его оснастили парой воздушных отклоняемых винтов вдоль передней кромки. С их помощью гаджет в состоянии подниматься и опускаться по вертикали. Базовый же полёт будет выполняться в режиме самолёта. В центральной части агрегата создатели предусмотрели отверстие, идущее насквозь и предназначенное для специального шеста, который можно разместить на любой военной технике, даже на подводной лодке. На одном специальном шесте одновременно помещается целый комплект дронов. Раскачивания можно будет избежать благодаря технологии гиростабилизации.
BAE Systems опубликовала в YouTube ролик, демонстрирующий возможности использования звена таких дронов в ситуации боевых действий. На место гипотетической вражеской позиции небольшие беспилотники доставляются в капсуле, которую сбрасывает высотный беспилотник, возможно, орбитального значения. Оказавшись в точке Х, дроны ликвидируют систему ПВО противника, оставаясь для неё невидимыми из-за малых габаритов и незначительных тепловых выбросов. Пока авторы не озвучивают ни планы, ни сроки производства рабочих прототипов беспилотников.
Оказавшись в точке Х, дроны ликвидируют систему ПВО противника, оставаясь для неё невидимыми из-за малых габаритов и незначительных тепловых выбросов. Пока авторы не озвучивают ни планы, ни сроки производства рабочих прототипов беспилотников.
Источник: BAE Systems
В Lockheed Martin создали экзоскелет для американских военных (видео)
Боевой экзоскелет ONYX, созданный компанией Lockheed Martin рассчитан на использования армией. Новинка облегчит перемещение военных на дальние расстояния. Само устройство весит 6.4 кг и может автономно работать до 8 часов при установке батареи весом 2,7 кг или 16 часов при установке аккумулятора на 5,4 кг. Устройство автоматически настраивается, определяя стиль движения человека, тип пересекаемой местности и характер переносимого груза.
Экзоскелет значительно упрощает спуски и подъёмы на возвышенностях и при переносе тяжестей, включаясь автоматически. Если же боец движется налегке по ровной местности, ONYX переходит в спящий режим.
Если же боец движется налегке по ровной местности, ONYX переходит в спящий режим.
Полноценные испытания новинки начнутся в декабре текущего года и только в случае успеха военное ведомство США подпишет с компанией Lockheed Martin контракт на закупку экзоскелетов.
Источник: «Известия»
Армию США укомплектуют новым беспилотниками Fury (видео)
Авиастроительный концерн Lockheed Martin (Мэриленд, США) в течение года проводил испытания нового беспилотного аппарата Fury (Ярость), который в ходе экспериментальных полётов проявил высокие лётные качества, в частности, способность к 12 часовому автономному полёту. БПЛА сконструирован специально для выполнения разведывательных заданий.
Дрон имеет размах крыльев около 5.2 м и может нести полезную нагрузку до 91 кг. Идеальным фактором для выполнения разведывательных заданий является практически полная бесшумность работы двигателя беспилотника. Для взлёта Fury не требуется специального аэродрома или оборудованной взлётной полосы. Дрон отстреливается из катапульты, которая встроена в стандартный автомобильный прицеп. В агентстве перспективных проектов для МО США DARPA рассматривается возможность установки на Furyспециальной интеллектуальной системы вооружения.
Для взлёта Fury не требуется специального аэродрома или оборудованной взлётной полосы. Дрон отстреливается из катапульты, которая встроена в стандартный автомобильный прицеп. В агентстве перспективных проектов для МО США DARPA рассматривается возможность установки на Furyспециальной интеллектуальной системы вооружения.
При полной боевой загрузке и на максимальной скорости Fury способен летать до 12 часов, а максимальное время полёта может достигать 15 часов. При этом беспилотник может подниматься на высоту нескольких километров. Главным преимуществом нового беспилотного аппарата является его компактность и малая стоимость. По этим показателям Fury превосходит своего главного конкурента БПЛА Predator, принятого на вооружение армии США. Серийное производство дронов Fury начнётся в ближайшие месяцы.
Источник: newatlas.com
Беспилотник, который запускают с катапульты (видео)
Беспилотные разведчики с недавних пор стали неотъемлемой частью военных конфликтов и разведывательных операций, однако, размеры и способы запуска ограничивали их применение. Компания Northrop Grumman разработала беспилотник Bat, который не только имеет малые габариты, но и запускается в воздух при помощи мобильной катапульты, что обеспечивает его локальное применение. Кроме того, дрон имеет невысокую стоимость и достаточный полезный объём для размещения дополнительного оборудования.
Компания Northrop Grumman разработала беспилотник Bat, который не только имеет малые габариты, но и запускается в воздух при помощи мобильной катапульты, что обеспечивает его локальное применение. Кроме того, дрон имеет невысокую стоимость и достаточный полезный объём для размещения дополнительного оборудования.
Источник: northropgrumman
Крутая самоделка — силовой экзоскелет своими руками
Крутая самоделка — силовой экзоскелет своими руками
Это пневматический экзоскелет с очень прочным стальным каркасом. Для этого скелета нам понадобится сварка (совсем немного), дрель и отрезная. Обшивка была нарезана на чпу фрезе. Ну, и немного стали.
Начнем мы с каркаса рук.
Весь каркас мы делаем из стального профиля. Он хорошо обрабатывается и благодаря многочисленным отверстиям очень удобен для соединения. Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6 мм.
Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6 мм.
Или же сбоку. Внизу будет установлена дуга из ПЭТа.
Все элементы подгоняются под конкретную руку поэтому о каких- то точных размерах сказать сложно. В моем случае основа этого элемента делалась из цельного куска в 1 метр и перегибалась под 90 градусов через 45-10-45 см.
Второй элемент идет от локтя до плеча. Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Вот так выглядит это всё сверху.
Или сбоку. Если есть небольшие «перепилы» как у меня это не страшно. На сталь в слабых местах всегда можно наварить нужные элементы. Для этого участка понадобится примерно 1,5 метра стального профиля.
Для этого участка понадобится примерно 1,5 метра стального профиля.
Вот так рука крепится к шаровой опоре, которая служит тут плечевым суставом. Довольно мощный и подвижный элемент. Крепится эта опора на 2 насквозь проходящие через весь каркас шпильки на 10 мм.
Сделаем 5-6 штук 20 см пневмомускул. Со стороны джойстика устанавливаем стальную пластину. Примерно на расстоянии 3 см от конца петли.
На эту пластину и на другой конец каркаса и крепим мускулы. Если отверстий будет не хватить — сверлим. Всё равно всё это будет ещё покрываться пластиком.
Сверху это выглядит вот так. Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
Также, при подборе элементов и нужного градуса изгиба, нужно учитываться что мускулы сокращаются примерно на 1/3.
Так же делается и вторая рука. Вместо двух штырей на конец можно приделать всё что угодно. Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
Следующий элемент это грудная основа с пнематикой. Это наиболее сложный и тяжелый элемент т.к. очень много элементов.
Сначала покажу как это должно выглядеть в конце.
Можно увидеть огромное количество зеленых трубок пневмопровода, мускулы, клапана, аккумуляторы.
Основу каркаса спины мы также делаем из стального профиля. Состоит он из 2 пропиленных и изогнутых элементов по 1 метру и одного «П» образного элемента 60-30-60. Всё это прошивается шпильками нужной длины. Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Сбоку это выглядит вот так. Все зажимается и соединяется болтами — никакой сварки. Так потом проще что-то снимать и подгонять, а это точно нужно будет делать не раз.
Бедра состоят из 4 элементов профиля длиной 20 см, 2 элементов из профиля длиной 10 см и 2 мощные шпильки на 12 мм, которые и соединяют все это. К спине бедра крепятся через очень мощную петлю.
К спине бедра крепятся через очень мощную петлю.
Ноги также крепятся через шаровую опору. Она устанавливается через 5 см кусок профиля. Это элемент зажимается 20 см кусками профиля через шпильку. Должно быть что-то типа вот такого. Это прочно и подвижно получается.
А теперь самое сложное — пневматика.
Будем использовать стандартную полную схему. Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Есть более простой, но менее эффективный вариант.
Приводы те же, но вся пневматика будет раз в 10 меньше…и во столько же раз неэффективней.
Но мы делаем первый вариант.
Сначала соединяем распределитель, ресивер, компрессор и пневмореле в 1 модуль. Так будет значительно удобней.
Ресивер сделан из обычного огнетушителя на 3 литра. Компрессор — двухцилиндровый для накачки шин. Клапана от полуавтоматической сварки для СО. Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Питание выводим через пневмореле на какой-нибудь мощный переключатель (На 25А) и на аккумуляторы.
На передней части ставим 3 стальные пластины по 30 см. На них мы будем крепить компрессорный модуль и клапана. Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.
Крепим на пластину клапана. Учитываем что на каждую группу мышц нужно 2 клапана — для активации и для спуска.
Все выходные трубки каждого активационного клапана подключаем к распределителю. Распределитель это по сути пневматический тройник. В него идет относительно толстый шланг от ресивера, а с него выходит много тонких трубок. Можно обойтись и без него, но понадобится просто огромное количество тройников от омывателя.
Кроме локтевого привода есть ещё привод на плече. Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Второй уголок крепится уже на руку. Важно так подобрать длину мышц и расположение уголка чтобы при полностью расслабленных мышцах рука свободно висела. Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
Осталось сделать ноги с обшивкой и экзоскелет готов!
Самая сложная часть ноги это коленный сустав. Вот так он выглядит. Их нужно сделать 4 шт. Соединяется он с помощью сварки.
Фотография несколько смазана, но принцип увидеть можно. Это просто подшипник в зажиме и ограничитель хода. К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
Если не делать ограничение хода то появляется вероятность повреждения ноги пилота.
Каркас ноги состоит из 4 подковообразных элементов. Все их размеры также подгоняются под конкретного человека. Все 4 элемента имею разные размеры. Скрепляется всё шпильками 10-12 мм, причем выводим 2 шпильки на длину бедра. Через них нога и будет крепится к шаровой опоре бедра.
Вариантов как сделать ступни было 2. Первый состоял в использовании уже готового элемента.
Это был более простой и быстрый способ. Для такой ступни нужно было только 4 элемента: Один стальной держатель для бруса, стальная пластина под ступню и 2 уголка для крепление к ноге. Крепится все должно было с помощью обычных портфельных шлейфов и замков.
Второй вариант заключался в изготовлении из пластин более аэргономичной конструкции. На этом варианте мы и остановились.
В этой ступне все элементы это просто 4 мм сталь, изогнутая и подогнанная под ногу. Элементы провариваются.
Элементы провариваются.
Ноги также имеют приводы. По 2 на ногу. Они позволяют удерживать статичное состояние или же подняться. Одна группа мышц расположена в бедре и тянется от каркаса бедра к верхней подкове ног. Мышцы как бы тянет вперед ногу.
Вторая группа мышц расположена прямо в каркасе ноги. Эта группа при активации «стягивает» ногу. Шланги идут к спине, к клапанной группе.
Управление ногами осуществляется через кнопки расположенные в «лодыжке». Т.е. мы тянем ногу назад и нажимаем кнопку.
Как и в случае с рукой ведем провода к клапанам. Руки используют только 2 из 5 контактов джойстиков поэтому можно приделать какое-то оборудование. Или же перевести управление ног на руки.
Для зашиты всей пневматики от повреждений и защиты пилота от пневматики весь экзоскелет покрывался противоударным ПЭТом.
ПЭТ это что-то типа толстого спрессованного полиэтилена. Является антивандальным покрытием. Покрываем пластиком места непосредственного расположения пневматики и участки контакта с пилотом. Крепим саморезами и болтами.
Крепим саморезами и болтами.
В обшивку ног устанавливаем кнопки для управления. Тут их лучше видно. Верхние кнопки управляют бедренными приводами. Провода и трубки лучше поместить в какую нибудь гофру или же другой шланг — их так много что велика вероятность случайно задеть.
Для того чтобы экзоскелет можно было легко одевать и снимать в качестве держателей пилота используем портфельные лямки.
Скелет готов! Само собой это не 146% точное руководство по сборке т.к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
Собирали мы вот это
Источник: pikabu.ru/@LPlague
DIY Exoskeletons Roundup Exoskeleton Report
Некоторые из величайших компаний начинали как небольшие проекты «сделай сам» (DIY) в чьем-то гараже. Apple, Harley Davidson, HP, Mattel и многие другие начинались как крошечные предприятия в жилой зоне. Поэтому имеет смысл следить не только за экзоскелетами, разработанными учеными в исследовательских лабораториях и инженерами в компаниях и стартапах, но и за проектами, которые делают обычные люди в свободное время.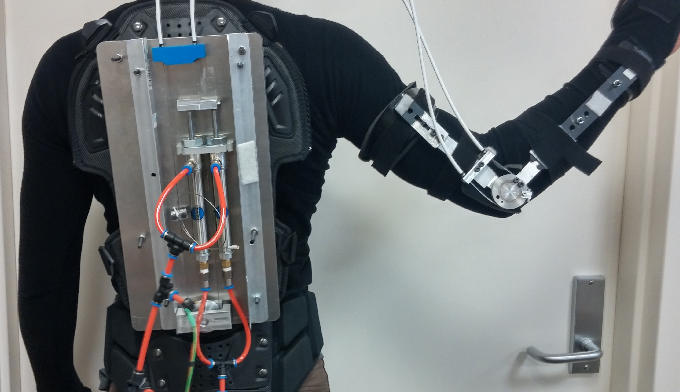 Ниже приведен обзор некоторых отличных самодельных экзоскелетов:
Ниже приведен обзор некоторых отличных самодельных экзоскелетов:
Экзоскелет руки, управляемый EMG (июль 2015 г.):
Создатель Джеймс Хо демонстрирует экзоскелет локтя, работающий на сжатом воздухе. Во второй итерации (видео выше) плата Arduino облегчает управление ЭМГ воздушным компрессором, используемым для питания устройства.
Экзоскелет, сделанный из инвалидной коляски (август 2015 г.)
Личность YouTube MrTeslonian управляет «Шоу изобретений, исследований, размышлений и исследований!» и построил полный экзоскелет тела полностью из частей инвалидной коляски. Экзоскелет в настоящее время обесточен, но к костюму добавляется кабельная система, облегчающая приведение в действие. Несмотря на то, что это упражнение в машиностроении, есть что-то поэтичное в том, чтобы увидеть носимого робота, полностью сделанного из частей инвалидной коляски, и это делает гораздо более правдоподобным то, что носимая робототехника станет помощником при ходьбе в недалеком будущем. .
.
Экзоскелет локтя (Элизиум) (август 2014 г.)
Участник YouTube Хаксмит сконструировал экзоскелет локтя с электроприводом, соединенный с рюкзаком. Что еще более важно, его серия из 16 серий документирует всю разработку и создание его носимого робота. От первоначального вдохновения фильмом «Элизиум», первых эскизов, чертежей SolidWorks, распаковки основных деталей до их окончательной сборки. Этот мини-сериал кажется органичным, и временами зрителя тянет в гараж создателя. Есть один момент, когда Хаксмит обнаружил, что нагрузка на плечи будет намного больше, чем предполагалось ранее, но он быстро проходит через несколько модернизаций конструкции, пока не удостоверится, что устройство выдержит вес. Неудивительно, что в настоящее время (2015 г.) это самый просматриваемый самодельный экзоскелет на YouTube!
Пневматический экзоскелет нижних конечностей (апрель 2014 г.
 )
)
Наш последний пользователь YouTube, Arduino67069 изготовил полностью функционирующий пневматический экзоскелет нижних конечностей для реабилитации. В экзоскелете используется контроллер Arduino, который циклически повторяет заранее запрограммированные схемы ходьбы. Если пользователь отпускает переключатель управления, носимый робот немедленно выполняет аварийную остановку.
AJAX, обновленная информация от Maker Faire (июнь 2015 г.)
В марте мы сообщали о команде подростков из Сан-Франциско, строящей экзоскелет с электроприводом в гараже AJAX — экзоскелет от старшеклассников. С тех пор команда завершила свою краудфандинговую кампанию и собрала более 7000 долларов при поддержке 120 человек. Майлз Вебер из Popular Science встретился с командой AJAX на выставке Bay Area Maker Faire 2015 (видео выше). Хотя носимое устройство не может полностью безопасно сбалансировать себя, оно способно без особых усилий поднимать большие веса. Вперёд, команда!
Хотя носимое устройство не может полностью безопасно сбалансировать себя, оно способно без особых усилий поднимать большие веса. Вперёд, команда!
Знаете ли вы какие-нибудь впечатляющие домашние экзоскелеты? Если да, поделитесь, оставив комментарий ниже.
ТегиAJAX DIY
Комплект робототехники EduExo — EduExo
EduExo — это роботизированный экзоскелет, который вы собираете и программируете самостоятельно. Он содержит оборудование, необходимое для создания экзоскелета локтя. Прилагаемый справочник содержит учебник
который проведет вас через различные этапы сборки. Кроме того, в справочнике представлена справочная информация об истории, функциональности и технологии экзоскелета. В конце концов, у вас будет
хорошее понимание технологии экзоскелета и ее применения, а также практический опыт создания и программирования собственного роботизированного экзоскелета.
Пройдя обучение, вы узнаете, насколько механическая конструкция напоминает анатомию человека, как соединить датчики и плату электроники,
и как спроектировать и запрограммировать систему управления. Далее вы подключите экзоскелет к компьютеру и научитесь использовать его в качестве тактильного устройства в
Далее вы подключите экзоскелет к компьютеру и научитесь использовать его в качестве тактильного устройства в
сочетание с виртуальной реальностью. Каждая глава учебника представляет одну тему, начиная с необходимой теоретической базы, за которой следует набор упражнений, которые выполняет пользователь.
с оборудованием.
Для кого это:
- Учащиеся старших классов и колледжей, которые хотят узнать о технологии роботизированных экзоскелетов, чтобы подготовиться к карьере в области экзоскелетов и носимой робототехники.
- Создатели и любители, которые ищут интересный и занимательный проект в увлекательной сфере.
- Учителя и профессора, желающие организовать курсы или лаборатории по экзоскелету. EduExo поставляется с дополнительными учебными материалами и может сэкономить много времени и денег на подготовке курса.
Что это:
Чем не является:
Медицинское устройство, предназначенное для
использоваться для любого вида терапии или медицинского применения.
Экзоскелет, который делает вас супер
сильный. Активация слабая. Он предназначен только для иллюстрации основных принципов экзоскелета. Вы не сможете больше подтягиваться, и он не сможет значительно поддерживать вашу руку.
путь. Он скорее обеспечивает мягкое руководство вашими движениями.Устройство plug-and-play, которое работает из коробки. Вы должны заставить его работать, это особенность!

Более подробную информацию об оборудовании и содержании руководства можно найти ниже. Если у вас есть какие-либо вопросы или предложения, пожалуйста, напишите нам.
EduExo — это экзоскелет локтевого сустава с одной степенью свободы. Аппаратное обеспечение сочетает в себе готовые компоненты (двигатель, датчик силы и микроконтроллер Arduino).
с жесткой структурой экзоскелета и интерфейсами манжеты.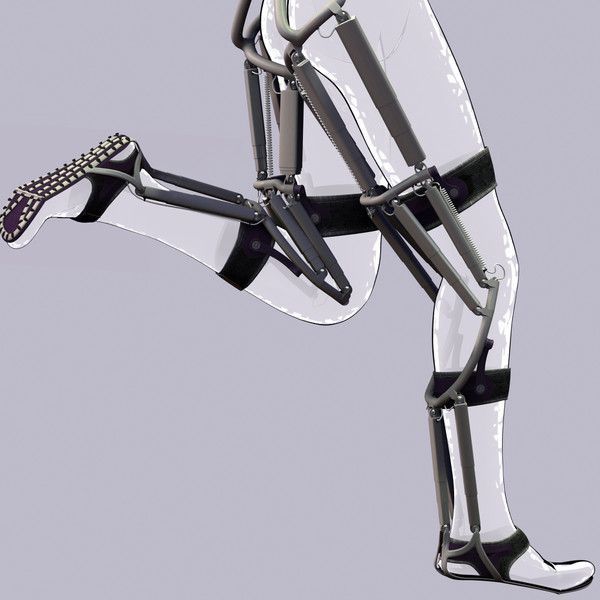
Руководство используется вместе с аппаратным обеспечением экзоскелета, чтобы научить вас всему, что вам нужно для понимания роботизированных экзоскелетов. Рассматриваемые темы:
ориентированный на человека механический дизайн, электроника, программное обеспечение и системы управления. Кроме того, рассматривается основная анатомия человека, чтобы помочь вам понять, как взаимодействуют человек и экзоскелет. Наконец, вы
познакомятся с тем, как использовать экзоскелет в качестве тактильного устройства ввода для виртуальной реальности или компьютерной игры.
Первая глава знакомит с областью роботизированных экзоскелетов. Взгляд на историю экзоскелета, примеры существующих систем, их основные технологии и
их приложения помогут вам начать работу.
В следующей главе обсуждаются механические и биомеханические аспекты конструкции экзоскелета. Он охватывает основы функциональной анатомии человека и экзоскелета.
механика: Как человек создает силы и способен двигаться? Как экзоскелет обеспечивает поддержку? Как экзоскелет спроектирован так, чтобы соответствовать форме человека и как он крепится?
Во время этого урока вы соберете и прикрепите экзоскелет к своей руке.
В следующей главе рассматриваются электронные и программные компоненты, преобразующие механический экзоскелет в роботизированный экзоскелет. Вы будете подключать
электронные компоненты, датчики и приводы к микроконтроллеру, а также написать основные программные процедуры для считывания сигналов датчиков и управления двигателем.
Далее обсуждаются системы управления, которые определяют поведение экзоскелета. Различные контроллеры, определяющие взаимодействие экзоскелета с пользователем,
представил. Шаг за шагом мы обсуждаем, внедряем и тестируем их.
Виртуальные реальности и видеоигры — хорошо зарекомендовавшие себя методы использования экзоскелетов. Они используются для повышения мотивации у пациентов, которые используют
экзоскелеты для реабилитации, т.е. после инсульта. Вы узнаете, как создать компьютерную игру или виртуальную реальность, как подключить экзоскелет к компьютеру и как он становится вашим
тактильный интерфейс с виртуальным миром.