Содержание
Искусственные мышцы за $1 соответствуют некоторым характеристикам человеческих мышц / Хабр
Один из вариантов искусственных мышц можно увидеть в верхней части фотографии (две трубочки). Они поднимают автомобильную покрышку весом 22 кг. Фото: Массачусетский технологический институт
Искусственные «мышцы» претендуют на роль безопасных и мощных приводов для множества различных устройств: от обычных машин до имплантируемой электроники и робототехники. Но часто конструкция и производство таких «мышц» слишком сложны и дороги, что ограничивает их использование. Группа учёных из Массачусетского технологического института и Гарвардского университета разработали предельно простую конструкцию биосовместимого привода стоимостью менее доллара, при этом достаточно мощного для столь примитивного устройства.
Приводы можно изготавливать из разных материалов и разного размера, используя опубликованный дизайн в стиле оригами. Они работают в воздухе, под водой, в вакууме.
Базовая концепция нового устройства включает в себя только сжимаемый каркас, внешнюю оболочку («кожу») и наполнитель, коим может быть любой флюидный материал, например, воздух или вода.
Эксперименты показали, что подобные приводы способны сжиматься до 10% своей максимальной длины, они выдерживают нагрузку до 600 кПа, а максимальная удельная мощность превышает 2 киловатта на килограмм. Это примерно соответствует или даже превышает удельную мощность человеческих мышц.
Дизайн, процесс производства и получившиеся многомасштабные приводы
Работа искусственных мышц, а также дешёвый процесс их производства показан на иллюстрации вверху.
Легенда
(А) Миниатюрные линейные приводы с применением зигзагообразных оригами-структур из полиэфирэфиркетона (PEEK) в качестве каркасов и плёнки ПВХ в качестве «кожи». Благодаря применению биосовместимых материалов такие приводы пригодны для использования в медицинских имплантатах и носимой электронике. (В) Большой мощный привод, собранный на зигзагообразном каркасе из нейлоновых печатных форм. «Кожа» сделана из нейлона с покрытием из термопластичного полиуретана. Автомобильное колесо весом 22 кг поднимается на высоту 20 см за 30 секунд (видео). (С) Принцип работы привода. Сокращение мышц происходит, в основном, за счёт силы натяжения «кожи». Эта сила создаётся разницей давления между внутренней и внешней флюидной средой. Удаление флюидного материала из привода временно увеличивает внутреннее давление. (D) Процесс производства. Стандартный привод можно быстро произвести в три простых этапа: создание каркаса, используя любой из множества способов производства; подготовка «кожи»; запечатка герметичного влагонепроницаемого слоя.
(В) Большой мощный привод, собранный на зигзагообразном каркасе из нейлоновых печатных форм. «Кожа» сделана из нейлона с покрытием из термопластичного полиуретана. Автомобильное колесо весом 22 кг поднимается на высоту 20 см за 30 секунд (видео). (С) Принцип работы привода. Сокращение мышц происходит, в основном, за счёт силы натяжения «кожи». Эта сила создаётся разницей давления между внутренней и внешней флюидной средой. Удаление флюидного материала из привода временно увеличивает внутреннее давление. (D) Процесс производства. Стандартный привод можно быстро произвести в три простых этапа: создание каркаса, используя любой из множества способов производства; подготовка «кожи»; запечатка герметичного влагонепроницаемого слоя.
Линейные зигзагообразные приводы, изготовленные разными методами из различных материалов
В части A показан тонкий прозрачный привод, который поднимает акриловую пластину. Здесь каркас изготовлен из прозрачного полотна полиэстера толщиной 0,254 мм методом лазерной резки и ручной складки. Кожа: прозрачная плёнка ПВХ (винил) толщиной 0,102 мм. Флюидный материал: воздух.
Кожа: прозрачная плёнка ПВХ (винил) толщиной 0,102 мм. Флюидный материал: воздух.
На иллюстрации В мягкий линейный привод хорошо работает даже будучи заключённым в металлическую гайку. Каркас и кожа: силиконовая резина и термопластичный полиуретан 0,24 мм. Флюидный материал: воздух.
На иллюстрации С вакуумный растворимый привод растворяется в горячей воде при температуре около 70°С за пять минут. И каркас, и кожа изготовлены из поливинилацетата. Флюидный материал: воздух.
Наконец, на последней иллюстрации показано, что привод с водой вместо воздуха в качестве флюидного материала на стальном каркасе успешно работает под водой, в частности, передвигает 3,5-сантиметровую рыбку.
«Приводы типа искусственных мышц — это одна из самых главных задач вообще в инженерном деле, — говорит кандидат наук Роб Вуд (Rob Wood), один из четырёх авторов научной работы. — Теперь мы создали приводы с характеристиками, сходными с настоящими мышцами, так что можно представить изготовление практически любого робота для практически любой задачи».
Научная статья опубликована 27 ноября 2017 года в журнале Proceedings of the National Academy of Sciences (doi: 10.1073/pnas.1713450114, pdf).
Искусственная мышца — HiSoUR История культуры
Искусственный мускул — это общий термин, используемый для приводов, материалов или устройств, которые имитируют естественную мышцу и могут реверсивно сжиматься, расширяться или вращаться внутри одного компонента из-за внешнего раздражителя (например, напряжения, тока, давления или температуры). Три основных реакции срабатывания — сжатие, расширение и вращение — могут быть объединены вместе в одном компоненте для создания других типов движений (например, изгиб путем сжимания одной стороны материала при расширении другой стороны). Обычные двигатели и пневматические линейные или поворотные приводы не квалифицируются как искусственные мышцы, потому что в приведении в действие участвует более одного компонента.
Благодаря своей высокой гибкости, универсальности и соотношению мощности к весу по сравнению с традиционными жесткими приводами, искусственные мышцы могут стать чрезвычайно разрушительной технологией. Хотя в настоящее время в ограниченном использовании технология может иметь широкие будущие приложения в промышленности, медицине, робототехнике и многих других областях.
Хотя в настоящее время в ограниченном использовании технология может иметь широкие будущие приложения в промышленности, медицине, робототехнике и многих других областях.
обзор
К ним относятся не только те, которые имитируют фактическую структуру мышечной массы биотехнологией, но и приводы, которые генерируют энергию, изменяя состояние, потребляя электрическую, магнитную или химическую энергию.
Существуют различные типы искусственных мышц, таких как пьезоэлектрический тип, сплав с памятью формы, электростатический тип, пневматический тип и т. П., Но в последнее время привлекают внимание те, кто использует полимер, такой как синтетическая смола. Говорят, что это мягкий привод, потому что материал, который будет использоваться, является мягким, движение является гибким, а также поддерживает внешние силы.
В механическом устройстве существует тенденция выводить заданный импульс по отношению к входной энергии, но если физическое существование какого-либо ограничения будет нарушено, барьер или само механическое устройство будут повреждены.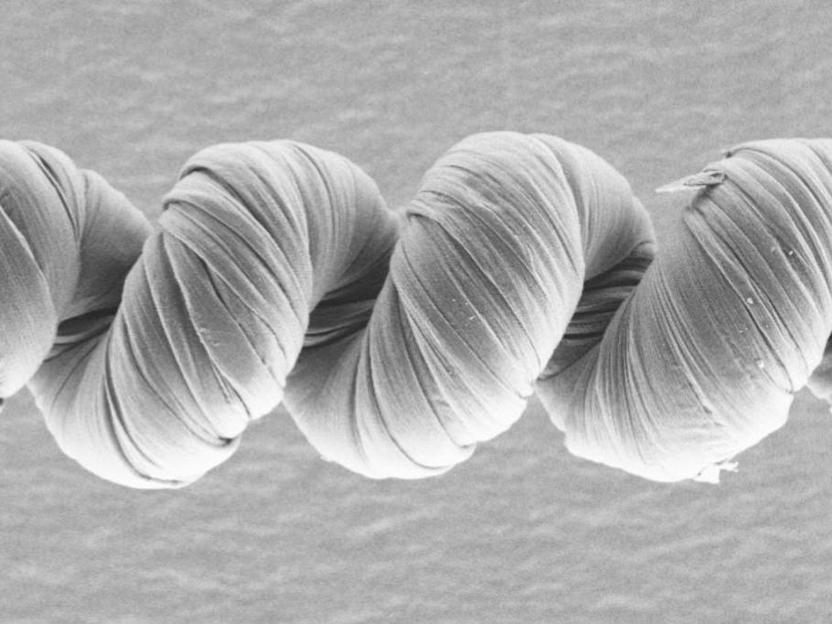 В искусственной мышце, хотя осуществление осуществляется с определенной шириной по отношению к входной энергии, в то же время, когда сила вводится снаружи или заданный импульс не может быть выставлен, этот сам блок питания генерирует избыточный импульс в форма искажения Считается, что он имеет функцию предотвращения поглощения, разрушения оборудования и повреждения объекта.
В искусственной мышце, хотя осуществление осуществляется с определенной шириной по отношению к входной энергии, в то же время, когда сила вводится снаружи или заданный импульс не может быть выставлен, этот сам блок питания генерирует избыточный импульс в форма искажения Считается, что он имеет функцию предотвращения поглощения, разрушения оборудования и повреждения объекта.
Эти «мягкие» источники питания могут временно налагать энергию на то, что механический крутящий момент чрезмерно потребляется из-за трения внутри и снаружи механизма, в форме эластичности, поэтому мы разработали более эффективное устройство. Помимо того, что элементы и конструкции машины не генерировать энергию, но сам материал является источником питания, можно сказать, что он полезен для миниатюризации устройства.
Однако с 2010 года, как и для материалов, используемых в качестве искусственных мышц, многие пьезоэлектрические и полимерные материалы находятся на стадии разработки и исследования, многие из них не могут быть массово произведены по низкой цене. • Невозможно преобразовать входную энергию в импульс. Приложения к продукты, продаваемые как обычно используемые продукты, ограничены из-за низкой эффективности преобразования и проблем со стойкостью к давлению / долговечности, кажется, что для распространения требуется время. Функция в качестве исполнительного устройства может быть достигнута путем применения принципа коммерчески доступного компактного двигателя, линейного двигателя (в том числе двигателя звуковой катушки) и т. Д., Это можно использовать в качестве недорогих существующих продуктов, доступных в виде модулей. Продукты, которые используют их, являются основными, потому что они могут.
• Невозможно преобразовать входную энергию в импульс. Приложения к продукты, продаваемые как обычно используемые продукты, ограничены из-за низкой эффективности преобразования и проблем со стойкостью к давлению / долговечности, кажется, что для распространения требуется время. Функция в качестве исполнительного устройства может быть достигнута путем применения принципа коммерчески доступного компактного двигателя, линейного двигателя (в том числе двигателя звуковой катушки) и т. Д., Это можно использовать в качестве недорогих существующих продуктов, доступных в виде модулей. Продукты, которые используют их, являются основными, потому что они могут.
Сравнение с естественными мышцами
Хотя нет общей теории, позволяющей сравнивать приводы, существуют «критерии мощности» для искусственных мышечных технологий, которые позволяют специфицировать новые технологии приводов по сравнению с природными мускульными свойствами. Таким образом, критерии включают напряжение, деформацию, скорость деформации, срок службы и модуль упругости. Некоторые авторы рассмотрели другие критерии (Huber et al., 1997), такие как плотность привода и разрешение деформации. С 2014 года самые мощные искусственные мышечные волокна могут обеспечить стократное увеличение мощности над эквивалентными длинами натуральных мышечных волокон.
Некоторые авторы рассмотрели другие критерии (Huber et al., 1997), такие как плотность привода и разрешение деформации. С 2014 года самые мощные искусственные мышечные волокна могут обеспечить стократное увеличение мощности над эквивалентными длинами натуральных мышечных волокон.
Исследователи измеряют скорость, плотность энергии, мощность и эффективность искусственных мышц; ни один тип искусственной мышцы не является лучшим во всех областях.
Типы
Искусственные мышцы можно разделить на три основные группы, основанные на их механизме срабатывания.
Приведение электрического поля
Электроактивные полимеры (EAP) представляют собой полимеры, которые могут приводиться в действие посредством применения электрических полей. В настоящее время наиболее видными EAP являются пьезоэлектрические полимеры, диэлектрические приводы (DEA), электрострикционные эластомеры, жидкие кристаллические эластомеры (LCE) и сегнетоэлектрические полимеры. Несмотря на то, что эти EAP можно изгибать, их малые мощности для крутящего момента в настоящее время ограничивают их полезность в качестве искусственных мышц.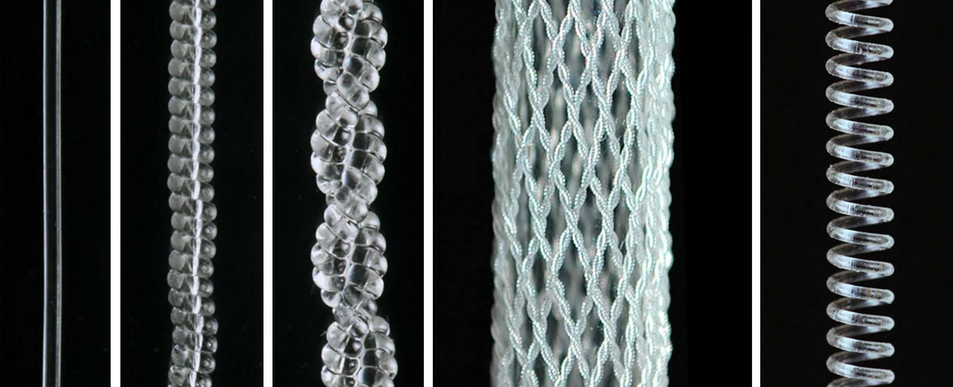 Более того, без принятого стандартного материала для создания устройств EAP коммерциализация оставалась непрактичной. Однако с 1990-х годов в технологии ПДООС достигнут значительный прогресс.
Более того, без принятого стандартного материала для создания устройств EAP коммерциализация оставалась непрактичной. Однако с 1990-х годов в технологии ПДООС достигнут значительный прогресс.
Ионное управление
Ионные EAP представляют собой полимеры, которые могут быть активированы путем диффузии ионов в растворе электролита (в дополнение к применению электрических полей). Текущие примеры ионных электроактивных полимеров включают полиэлектродные гели, иономерные полимерные металлические композиты (IPMC), проводящие полимеры и электрореологические жидкости (ERF). В 2011 году было продемонстрировано, что скрученные углеродные нанотрубки могут также приводиться в действие путем применения электрического поля.
Приведение в действие электропитания
Скрученные и спиральные полимерные (TCP) мышцы, также известные как сверхпрочный полимер (SCP), представляют собой спиральный полимер, который может приводиться в действие электрической энергией. Мускул TCP похож на спиральную пружину.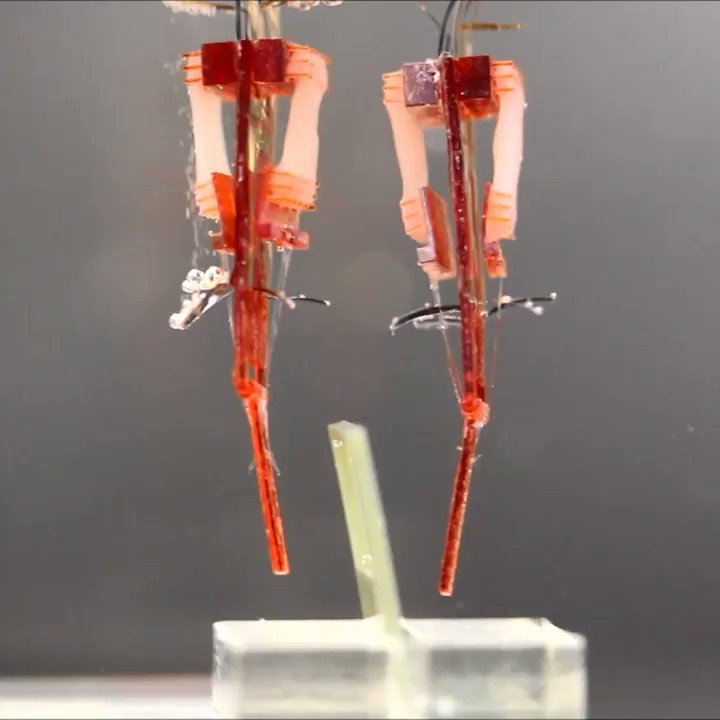 Тренировочные мышцы обычно изготавливаются из нейлона с серебряным покрытием. Мышцы TCP также могут быть изготовлены из другого покрытия с электропроводностью, такого как золото. Мускулы TCP должны находиться под нагрузкой, чтобы поддерживать растяжение мышц. Электрическая энергия преобразуется в тепловую энергию из-за электрического сопротивления, которое также известно как джоулево нагревание, омическое нагревание и резистивный нагрев. По мере того как температура мышц TCP увеличивается при нагревании Джоулем, полимер сжимается, и это вызывает сокращение мышц.
Тренировочные мышцы обычно изготавливаются из нейлона с серебряным покрытием. Мышцы TCP также могут быть изготовлены из другого покрытия с электропроводностью, такого как золото. Мускулы TCP должны находиться под нагрузкой, чтобы поддерживать растяжение мышц. Электрическая энергия преобразуется в тепловую энергию из-за электрического сопротивления, которое также известно как джоулево нагревание, омическое нагревание и резистивный нагрев. По мере того как температура мышц TCP увеличивается при нагревании Джоулем, полимер сжимается, и это вызывает сокращение мышц.
Пневматическое приведение в действие
Пневматические искусственные мышцы (PAM) работают, наполняя пневматический пузырь сжатым воздухом. При приложении давления газа к мочевому пузырю происходит изотропное расширение объема, но оно ограничено плетеными проводами, которые окружают пузырь, переводя объемное расширение на линейное сжатие вдоль оси исполнительного механизма. PAM можно классифицировать по их работе и дизайну; а именно, PAM имеют пневматическое или гидравлическое управление, избыточное давление или работу под давлением, плетеные / сетчатые или внедренные мембраны и растягивающие мембраны или перестраивающие мембраны. Среди наиболее часто используемых PAM сегодня — цилиндрическая плетеная мышца, известная как Musk McKibben, которая была впервые разработана JL McKibben в 1950-х годах.
Среди наиболее часто используемых PAM сегодня — цилиндрическая плетеная мышца, известная как Musk McKibben, которая была впервые разработана JL McKibben в 1950-х годах.
Тепловое управление
Леска
Искусственные мышцы, изготовленные из обычной лески и швейной нитки, могут поднимать в 100 раз больше веса и вырабатывать в 100 раз больше энергии, чем человеческие мышцы одинаковой длины и веса.
Искусственные мышцы, основанные на леске, уже на порядок меньше (на фунт), чем сплав с памятью формы или углеродной нанотрубкой; но в настоящее время относительно низкая эффективность.
Отдельные макромолекулы выровнены с волокном в коммерчески доступных полимерных волокнах. Наматывая их на катушки, исследователи делают искусственные мышцы, которые сжимаются со скоростью, подобной человеческим мускулам.
A (раскрученное) полимерное волокно, такое как полиэтеленовая леска или нейлоновая швейная нить, в отличие от большинства материалов, сокращается при нагревании до около 4% для повышения температуры на 250 K. Закручивая волокно и наматывая закрученное волокно в катушку, нагрев затягивает катушку и сокращает ее до 49%. Исследователи обнаружили другой способ намотки катушки, так что нагрев увеличивает катушку на 69%.
Закручивая волокно и наматывая закрученное волокно в катушку, нагрев затягивает катушку и сокращает ее до 49%. Исследователи обнаружили другой способ намотки катушки, так что нагрев увеличивает катушку на 69%.
Одним применением термически активированных искусственных мышц является автоматическое открытие и закрытие окон, реагирование на температуру без использования какой-либо мощности.
Крошечные искусственные мышцы, состоящие из скрученных углеродных нанотрубок, наполненных парафином, в 200 раз сильнее, чем человеческая мышца.
Сплавы с памятью формы
Пластинчатые сплавы (SMAs), жидкие кристаллические эластомеры и металлические сплавы, которые могут быть деформированы, а затем возвращены в исходную форму при воздействии тепла, могут функционировать как искусственные мышцы. Искусственные мышцы на основе теплового привода обеспечивают теплостойкость, ударопрочность, низкую плотность, высокую усталостную прочность и большую силу при изменении формы. В 2012 году был продемонстрирован новый класс активированных электрическим полем искусственных мышц, не содержащих электролит, называемых «витыми нитями», на основе теплового расширения вторичного материала в проводящей скрученной структуре мышцы.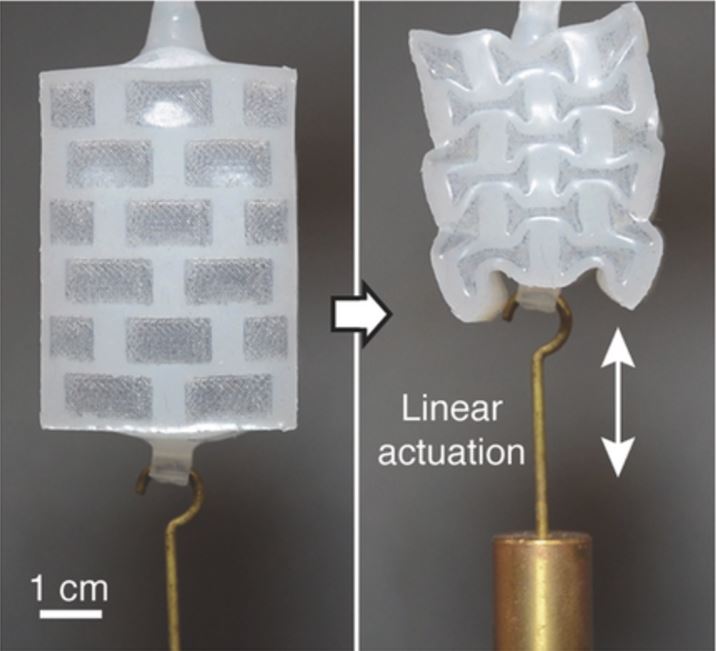 Было также продемонстрировано, что намотанная лента из диоксида ванадия может скручиваться и раскручиваться при максимальной скорости кручения 200 000 об / мин.
Было также продемонстрировано, что намотанная лента из диоксида ванадия может скручиваться и раскручиваться при максимальной скорости кручения 200 000 об / мин.
Искусственная мышца с использованием полимера
Электрический реактивный полимер (английская версия) (Electroactive Polymers: EAP)
Ионная проводящая полимерная пленка (ICPF: ионная проводящая полимерная пленка)
В 1991 году он был изобретен Keisuke Oguchi (Осакский научно-исследовательский институт промышленных технологий, Национальный институт передовых промышленных наук и технологий, бывший AIST) и другие.
Благородный металл (золото, платина), химически покрытый с обеих сторон пленки перфторсульфоновой кислоты (PFS), и изгиб с высокой скоростью, когда напряжение подается на оба боковых электрода.
Искусственная мышца с использованием пневматического давления
Пневматические искусственные мышцы (PAM)
Тип McKibben (искусственная мышца)
В 1961 году он был разработан Джозефом Маккиббеном.
Он имеет форму резиновой трубки, покрытой нейлоновым волокном, и сжимается сжатым воздухом внутри.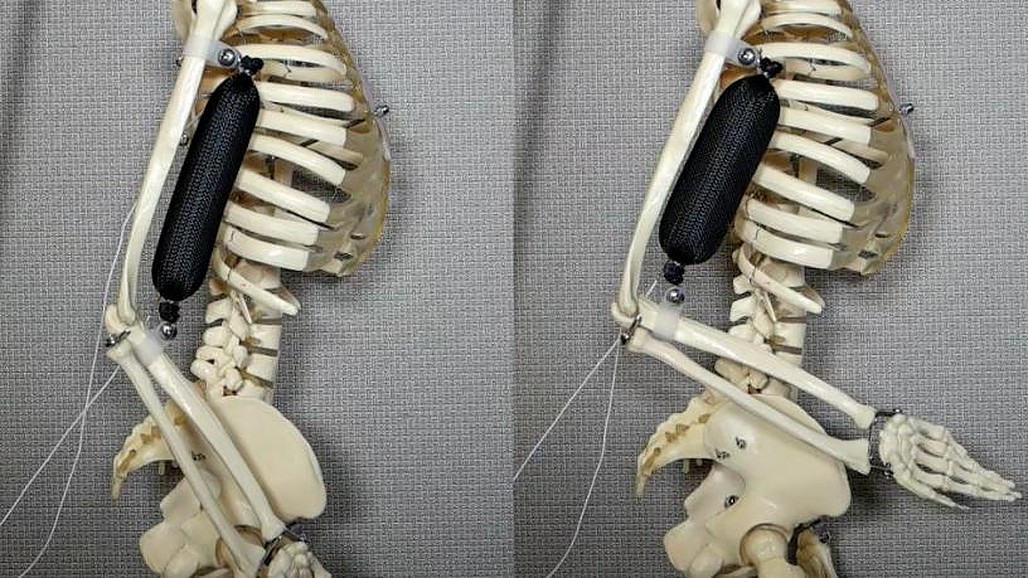
Origami Robot, разработанный MIT Computer Science и лабораторией искусственного интеллекта (CSAIL). Искусственные мышцы, сочетающие структуру оригами и вакуумную упаковку. Вытягивая воздух внутри вакуумной упаковки, внутренняя складная бумага также деформирует сцепление и становится скелетом.
Искусственные мышцы с использованием электричества и магнетизма
Использование электрореологической жидкости
Использование магнитной вязкой жидкости (магнитореологической жидкости)
Использование электростатического притяжения
В качестве искусственной мускулатуры также можно применять исполнительный механизм, использующий электростатическое усилие, например, «электростатический двигатель большой мощности» при исследованиях и разработках лаборатории Higuchi • Yamamoto Университета Токио. Видео электроактивных полимеров в действии
Мышечное волокно УНТ
В Научно-исследовательском институте нанотехнологий Техасского университета в Далласе была разработана искусственная мышца, структурированная с контрактом путем добавления напряжения около 5 кВ в обработанную углеродную нанотрубку. Искусственная мышца имеет лишь немного более тяжелую плотность, чем воздух, имеет быструю скорость сокращения и в 30 раз больше энергии на площадь, чем биологическая мышца. (Обратите внимание, что он не особенно силен по сравнению с другими искусственными мышцами, что в тридцать раз больше мышц тела.
Искусственная мышца имеет лишь немного более тяжелую плотность, чем воздух, имеет быструю скорость сокращения и в 30 раз больше энергии на площадь, чем биологическая мышца. (Обратите внимание, что он не особенно силен по сравнению с другими искусственными мышцами, что в тридцать раз больше мышц тела.
Системы управления
Три типа искусственных мышц имеют различные ограничения, которые влияют на тип системы управления, которую они требуют для приведения в действие. Важно отметить, однако, что системы управления часто предназначены для соответствия спецификациям данного эксперимента, а некоторые эксперименты требуют совместного использования различных исполнительных механизмов или гибридной схемы управления. Таким образом, следующие примеры не должны рассматриваться как исчерпывающий список различных систем управления, которые могут быть использованы для приведения в действие данной искусственной мышцы.
Управление напряжением
Скрученные и спиральные полимерные (TCP) мышцы могут быть смоделированы линейными временными состояниями первого порядка при вводе электрического напряжения с точностью более 85%.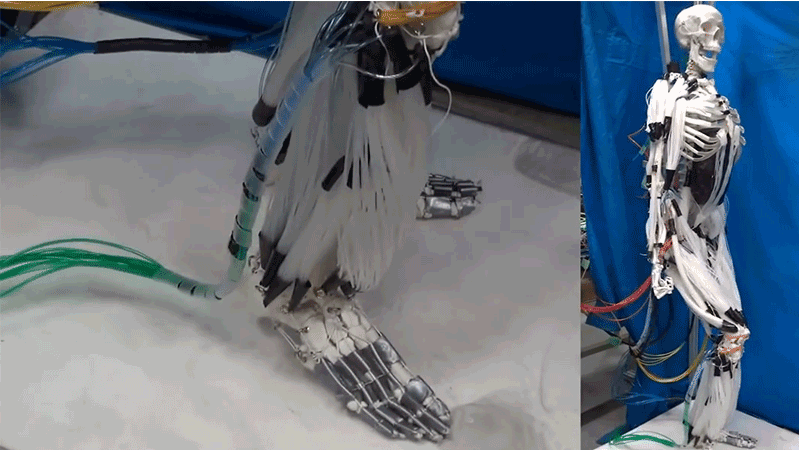 Таким образом, мышцы TCP легко управляются цифровым ПИД-регулятором. Для ускорения ПИД-регулятора можно использовать нечеткий контроллер.
Таким образом, мышцы TCP легко управляются цифровым ПИД-регулятором. Для ускорения ПИД-регулятора можно использовать нечеткий контроллер.
Контроль EAP
EAP предлагают более низкий вес, более быстрый отклик, более высокую плотность мощности и более тихую работу по сравнению с традиционными приводами. Как электрические, так и ионные EAP в основном управляются с использованием контуров управления обратной связью, более известных как системы управления с замкнутым контуром.
Пневматическое управление
В настоящее время существуют два типа пневматических искусственных мышц (PAM). Первый тип имеет единственный мочевой пузырь, окруженный плетеным рукавом, а второй тип имеет двойной пузырь.
Одиночный пузырь, окруженный плетеным рукавом
Пневматические искусственные мышцы, в то же время легкие и недорогие, представляют собой особенно сложную проблему контроля, так как они являются высоконелинейными и обладают свойствами, такими как температура, которые со временем значительно меняются.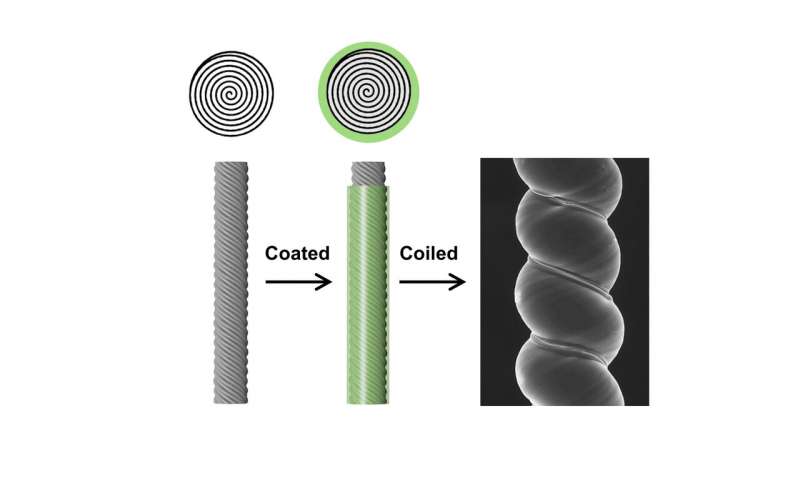 Пары обычно состоят из резиновых и пластмассовых компонентов. Поскольку эти части вступают в контакт друг с другом во время приведения в действие, температура ПАМ увеличивается, что в конечном итоге приводит к постоянным изменениям структуры искусственной мышцы с течением времени. Эта проблема привела к различным экспериментальным подходам. В заключение (предоставлено Ahn et al.) Жизнеспособные экспериментальные системы управления включают ПИД-контроль, адаптивный контроль (Lilly, 2003), нелинейный оптимальный прогнозный контроль (Reynolds et al., 2003), управление переменной структурой (Reppper et al., 1998) Medrano-Cerda et al., 1995), планирование получения (Reppperer et al., 1999) и различные подходы к компьютерному компьютеру, включая управление алгоритмом обучения нейронной сети Kohonen (Hesselroth et al., 1994), нейронную сеть / нелинейное ПИД-управление ( Ahn and Thanh, 2005) и нейро-нечеткого / генетического контроля (Chan et al., 2003; Lilly et al., 2003).
Пары обычно состоят из резиновых и пластмассовых компонентов. Поскольку эти части вступают в контакт друг с другом во время приведения в действие, температура ПАМ увеличивается, что в конечном итоге приводит к постоянным изменениям структуры искусственной мышцы с течением времени. Эта проблема привела к различным экспериментальным подходам. В заключение (предоставлено Ahn et al.) Жизнеспособные экспериментальные системы управления включают ПИД-контроль, адаптивный контроль (Lilly, 2003), нелинейный оптимальный прогнозный контроль (Reynolds et al., 2003), управление переменной структурой (Reppper et al., 1998) Medrano-Cerda et al., 1995), планирование получения (Reppperer et al., 1999) и различные подходы к компьютерному компьютеру, включая управление алгоритмом обучения нейронной сети Kohonen (Hesselroth et al., 1994), нейронную сеть / нелинейное ПИД-управление ( Ahn and Thanh, 2005) и нейро-нечеткого / генетического контроля (Chan et al., 2003; Lilly et al., 2003).
Проблемы управления высоко нелинейными системами, как правило, решались методом проб и ошибок, с помощью которых можно было бы дразнить «нечеткие модели» (Chan et al.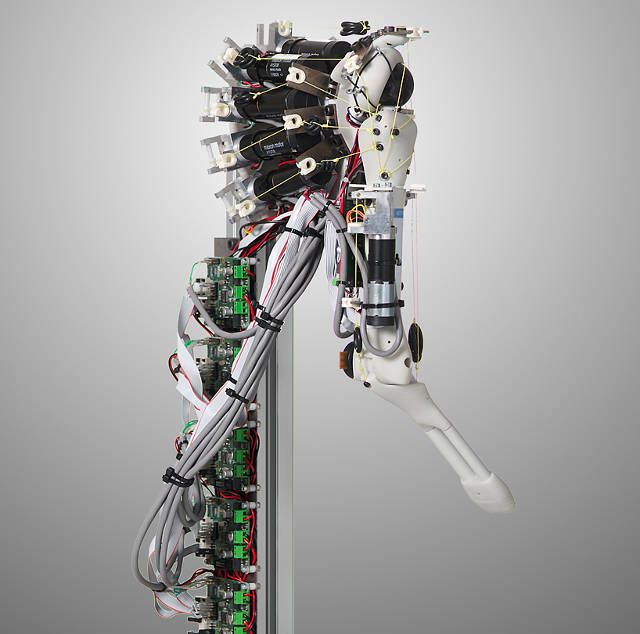 , 2003) поведенческих возможностей системы (из экспериментальных результатов конкретной системы будучи испытанным) опытным специалистом-человеком. Однако в некоторых исследованиях использовались «реальные данные» (Nelles O., 2000) для повышения точности данной нечеткой модели, одновременно избегая математических сложностей предыдущих моделей. Эксперимент Ан и др. — это просто один из примеров недавних экспериментов, в которых используются модифицированные генетические алгоритмы (MGA) для обучения нечетких моделей с использованием экспериментальных данных ввода-вывода от робота-манипулятора PAM.
, 2003) поведенческих возможностей системы (из экспериментальных результатов конкретной системы будучи испытанным) опытным специалистом-человеком. Однако в некоторых исследованиях использовались «реальные данные» (Nelles O., 2000) для повышения точности данной нечеткой модели, одновременно избегая математических сложностей предыдущих моделей. Эксперимент Ан и др. — это просто один из примеров недавних экспериментов, в которых используются модифицированные генетические алгоритмы (MGA) для обучения нечетких моделей с использованием экспериментальных данных ввода-вывода от робота-манипулятора PAM.
Двойной пузырь
Этот привод состоит из внешней мембраны с внутренней гибкой мембраной, разделяющей внутреннюю часть мышцы на две части. Сухожилие прикрепляется к мембране и выходит из мышцы через рукав, так что сухожилие может сжиматься в мышце. Трубка позволяет воздуху во внутренний пузырь, который затем катится во внешний пузырь. Ключевым преимуществом пневматической мышцы этого типа является отсутствие потенциально фрикционного движения мочевого пузыря против наружного рукава.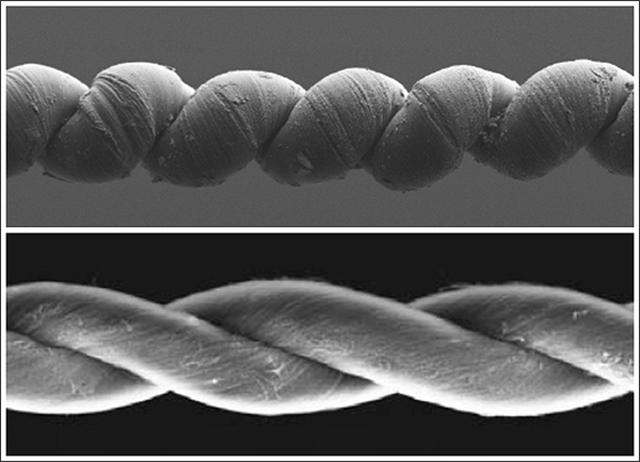
Термический контроль
Искусственные мышцы SMA, в то же время легкие и полезные в приложениях, требующих большой силы и смещения, также представляют особые проблемы контроля; а именно, искусственные мышцы SMA ограничены их гистерезисными отношениями ввода-вывода и ограничениями пропускной способности. Как Wen et al. обсуждать, явление трансформации фазы SMA является «гистерезисным» в том смысле, что результирующая выходная SMA-цепь зависит от истории ее ввода тепла. Что касается ограничений пропускной способности, то динамический отклик привода SMA во время гистерезисных фазовых превращений очень медленный из-за количества времени, необходимого для передачи тепла искусственной мышце SMA. Очень мало исследований было проведено в отношении контроля SMA из-за допущений, которые рассматривают приложения SMA как статические устройства; тем не менее, были проверены различные подходы к управлению для решения проблемы управления гистерезисной нелинейностью.
Как правило, эта проблема требовала применения либо компенсации разомкнутого контура, либо контроля обратной связи с обратной связью.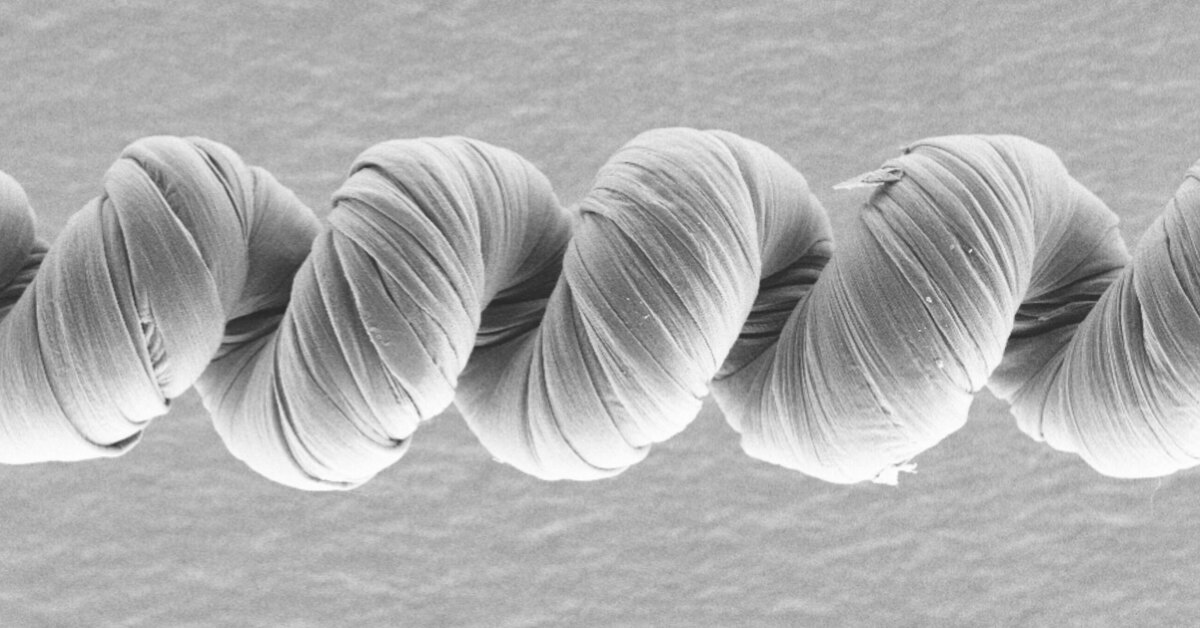 Что касается управления с разомкнутым контуром, модель Preisach часто использовалась для ее простой структуры и способности к простому моделированию и управлению (Hughes and Wen, 1995). Что касается управления с обратной связью, использовался пассивный подход, анализирующий стабильность SMA с замкнутым контуром (Madill and Wen, 1994). Исследование Wen и др. Дает еще один пример управления обратной связью с обратной связью, демонстрируя стабильность управления с замкнутым контуром в приложениях SMA посредством применения комбинации управления обратной связью по силе и управления положением на гибкой алюминиевой балке, приводимой в действие SMA, выполненной из нитиноловая.
Что касается управления с разомкнутым контуром, модель Preisach часто использовалась для ее простой структуры и способности к простому моделированию и управлению (Hughes and Wen, 1995). Что касается управления с обратной связью, использовался пассивный подход, анализирующий стабильность SMA с замкнутым контуром (Madill and Wen, 1994). Исследование Wen и др. Дает еще один пример управления обратной связью с обратной связью, демонстрируя стабильность управления с замкнутым контуром в приложениях SMA посредством применения комбинации управления обратной связью по силе и управления положением на гибкой алюминиевой балке, приводимой в действие SMA, выполненной из нитиноловая.
Приложения
Искусственные мышечные технологии имеют широкое применение в биомиметических машинах, включая роботы, промышленные приводы и экзоскелеты с электроприводом. Искусственные мышцы, основанные на EAP, сочетают в себе легкий вес, требования к низкой мощности, упругость и ловкость для передвижения и манипуляции. Будущие устройства EAP будут иметь приложения в аэрокосмической, автомобильной промышленности, медицине, робототехнике, механизмах артикуляции, развлечениях, анимации, игрушках, одежде, тактильных и тактильных интерфейсах, управлении шумом, преобразователях, генераторах электроэнергии и интеллектуальных структурах.
Пневматические искусственные мышцы также обеспечивают большую гибкость, управляемость и легкость по сравнению с обычными пневматическими цилиндрами. Большинство применений PAM связаны с использованием мышц, подобных McKibben. Термоприводы, такие как SMA, имеют различные военные, медицинские, безопасные и роботизированные приложения, а также могут использоваться для генерирования энергии посредством механических изменений формы.
Можно ли будет создать сильную и быстро переключающуюся искусственную мышцу?
Схематическая диаграмма формирования ионных каналов внутри полимерного электролита. 1 кредит
В американском боевике «Тихоокеанский рубеж» гигантские роботы по имени «Егери» сражаются с неизвестными монстрами, чтобы спасти человечество. Эти роботы оснащены искусственными мышцами, имитирующими настоящие живые тела, и побеждают монстров силой и скоростью. Ведутся исследования по оснащению настоящих роботов искусственными мышцами, подобными тем, что показаны в фильме. Однако мощная сила и высокая скорость в искусственных мышцах не могут быть реализованы, поскольку механическая прочность (сила) и проводимость (скорость) полимерного электролита — ключевых материалов, приводящих в движение актуатор, — имеют противоречивые характеристики.
Эти роботы оснащены искусственными мышцами, имитирующими настоящие живые тела, и побеждают монстров силой и скоростью. Ведутся исследования по оснащению настоящих роботов искусственными мышцами, подобными тем, что показаны в фильме. Однако мощная сила и высокая скорость в искусственных мышцах не могут быть реализованы, поскольку механическая прочность (сила) и проводимость (скорость) полимерного электролита — ключевых материалов, приводящих в движение актуатор, — имеют противоречивые характеристики.
Исследовательская группа POSTECH под руководством профессора Мун Чжон Пака, профессора Чан Юн Сона и профессора Руй-Янг Ван из химического факультета разработала новую концепцию полимерного электролита с различными функциональными группами, расположенными на расстоянии 2Å. Этот полимерный электролит способен как к ионному, так и к водородному взаимодействию, что открывает возможность разрешения этих противоречий. Результаты этого исследования были недавно опубликованы в Advanced Materials 9. 0006 .
0006 .
Искусственные мышцы используются для того, чтобы роботы двигали конечностями естественно, как люди. Для управления этими искусственными мышцами требуется привод, демонстрирующий механическое преобразование в условиях низкого напряжения. Однако из-за природы полимерного электролита, используемого в приводе, сила и скорость не могут быть достигнуты одновременно, потому что увеличение мышечной силы замедляет скорость переключения, а увеличение скорости снижает силу.
Чтобы преодолеть представленные до сих пор ограничения, в исследовании была представлена инновационная концепция бифункционального полимера. За счет формирования одномерного ионного канала шириной несколько нанометров внутри полимерной матрицы, твердой как стекло, получен суперионный полимерный электролит с высокой ионной проводимостью и механической прочностью.
Различные движения привода низковольтного привода. 1 кредит
Химическая структура бифункционального полимерного звена. 1 кредит
Результаты этого исследования могут создать инновации в мягкой робототехнике и носимых технологиях, поскольку их можно применить для разработки беспрецедентной искусственной мышцы, которая подключает портативную батарею (1,5 В), производит быстрое переключение в несколько миллисекунд (тысячных долей секунды). секунду) и большая сила. Кроме того, ожидается, что эти результаты будут применяться в полностью твердотельных электрохимических устройствах следующего поколения и высокостабильных литий-металлических батареях.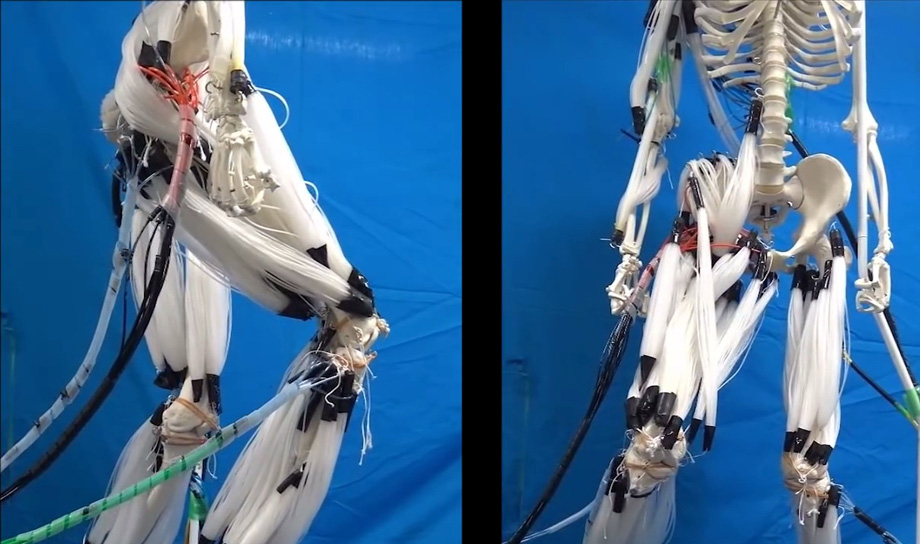
Дополнительная информация:
Руи-Янг Ван и др., Суперионные бифункциональные полимерные электролиты для хранения и преобразования энергии в твердом состоянии, Advanced Materials (2022). DOI: 10.1002/adma.202203413
Предоставлено
Пхоханский университет науки и технологий (POSTECH)
Цитата :
Будет ли возможным создание сильных и быстро переключающихся искусственных мышц? (2022, 12 августа)
получено 8 ноября 2022 г.
из https://phys.org/news/2022-08-strong-fast-switching-artificial-muscle-feasible.html
Этот документ защищен авторским правом. Помимо любой добросовестной сделки с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в ознакомительных целях.
Испытание на прочность искусственных мышц | Feature
Задумайтесь на минуту о том, что делает ваше тело, пока вы читаете это. Ваши глаза сканируют страницу; ваши пальцы нажимают на клавиатуру или проводят пальцем по экрану; ваши руки, возможно, держат бумажную копию Мир Химии ; ваша спина поддерживает вас, когда вы сидите на стуле.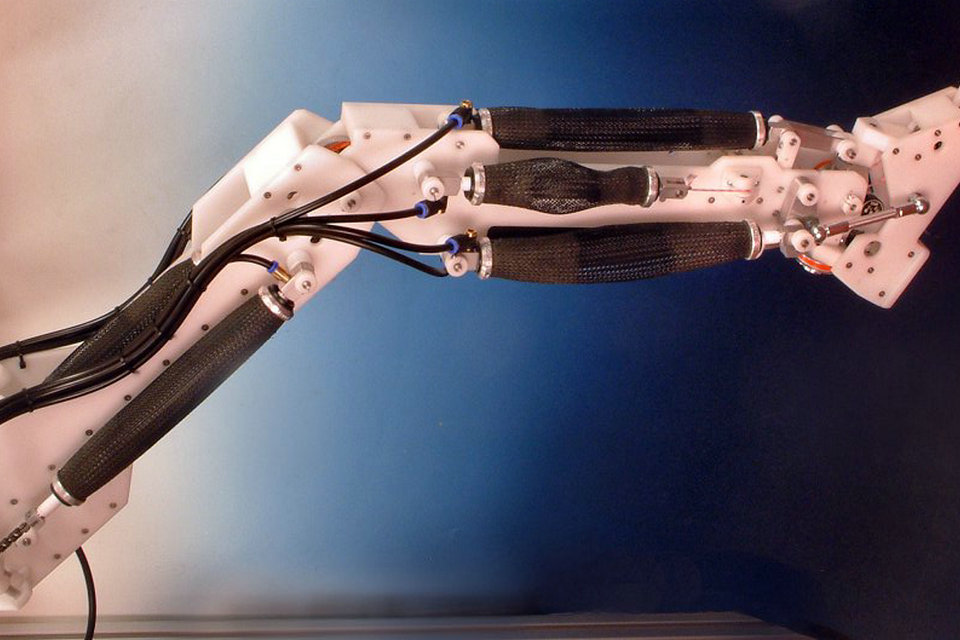 Даже когда мы занимаемся чем-то таким сидячим, как чтение, наши мышцы постоянно работают. Как бы за кулисами, сердечные мышцы заставляют наше сердце биться, а гладкие мышцы выполняют другие непроизвольные функции, такие как пищеварение. Все эти действия и многое другое — Усэйн Болт, пробежавший рекордные 100 метров, крылья колибри, взмахивающие 50 раз в секунду, паническое бегство слона — приводятся в действие мышцами с очень похожими структурами и механизмами действия.
Даже когда мы занимаемся чем-то таким сидячим, как чтение, наши мышцы постоянно работают. Как бы за кулисами, сердечные мышцы заставляют наше сердце биться, а гладкие мышцы выполняют другие непроизвольные функции, такие как пищеварение. Все эти действия и многое другое — Усэйн Болт, пробежавший рекордные 100 метров, крылья колибри, взмахивающие 50 раз в секунду, паническое бегство слона — приводятся в действие мышцами с очень похожими структурами и механизмами действия.
Мышечная ткань необычайно универсальна, но ее структура кажется довольно простой. Поэтому неудивительно, что идея подражания его свойствам существует уже многие поколения. Первым, кто серьезно исследовал это, был эрудит 17-го века Роберт Гук. Он может быть наиболее известен студентам-физикам благодаря своему одноименному закону, но он также внес значительный вклад в биологические науки: он был первым, кто рассмотрел микроорганизмы через микроскоп, и первым придумал слово «клетка». Попытки Гука создать машину для преобразования силы в движение подобно тому, как естественные мышцы использовали порох для подачи силы. «У меня был способ создать искусственную мускулатуру, чтобы управлять силой 20 человек», — прокомментировал он, хотя эксперименты, похоже, были прекращены довольно быстро.
«У меня был способ создать искусственную мускулатуру, чтобы управлять силой 20 человек», — прокомментировал он, хотя эксперименты, похоже, были прекращены довольно быстро.
На базовом уровне мышцы можно описать как биологические исполнительные механизмы
Там, где Гук использовал порох для получения энергии для движения, биологические мышцы используют почти универсальный биохимический источник энергии, аденозинтрифосфат (АТФ). За последние полвека биологи и биохимики неустанно работали, чтобы определить их структуру и механизм, и таким образом предоставить сегодняшним разработчикам искусственных мышц шаблон для работы со всеми молекулярными деталями. Это предприятие началось с новаторского структурного биолога Кена Холмса в Лаборатории молекулярной биологии MRC в Кембридже, Великобритания, где он объяснил молекулярный механизм мышечного сокращения.
Металлические мышцы
Структура скелетных мышц, также известных как «произвольные» мышцы, поскольку они находятся под контролем нервной системы, была известна с низким разрешением задолго до того, как Холмс начал изучать их молекулярный состав. Эти мышцы состоят из регулярно повторяющихся функциональных единиц, или саркомеров, что придает им характерный исчерченный (или полосатый) вид под световым микроскопом. Мышечная ткань состоит из пучков длинных волокнистых клеток, каждая из которых содержит множество ядер и множество длинных параллельных миофибрилл. В свою очередь, каждая миофибрилла состоит из нескольких копий двух длинных белков, миозина и актина, вместе с белками, которые связывают их вместе, образуя толстые и тонкие филаменты соответственно. Миозин обеспечивает двигатель для сокращения мышц. Вкратце, каждая молекула миозина имеет моторный домен, состоящий из двух «головок», которые могут изгибаться из изогнутой в прямую конформацию за счет гидролиза АТФ, и длинный тонкий хвост, который расположен параллельно соседним молекулам актина. Возможно, вопреки интуиции, миозин и другие моторные белки можно рассматривать просто как катализаторы гидролиза АТФ: эти моторные белки являются ферментами.
Эти мышцы состоят из регулярно повторяющихся функциональных единиц, или саркомеров, что придает им характерный исчерченный (или полосатый) вид под световым микроскопом. Мышечная ткань состоит из пучков длинных волокнистых клеток, каждая из которых содержит множество ядер и множество длинных параллельных миофибрилл. В свою очередь, каждая миофибрилла состоит из нескольких копий двух длинных белков, миозина и актина, вместе с белками, которые связывают их вместе, образуя толстые и тонкие филаменты соответственно. Миозин обеспечивает двигатель для сокращения мышц. Вкратце, каждая молекула миозина имеет моторный домен, состоящий из двух «головок», которые могут изгибаться из изогнутой в прямую конформацию за счет гидролиза АТФ, и длинный тонкий хвост, который расположен параллельно соседним молекулам актина. Возможно, вопреки интуиции, миозин и другие моторные белки можно рассматривать просто как катализаторы гидролиза АТФ: эти моторные белки являются ферментами.
Источник: © Science Photo Library
Мышцы состоят из иерархических пучков волокон и филаментов, наименьшими из которых являются миофиламенты, состоящие из белков актина и миозина.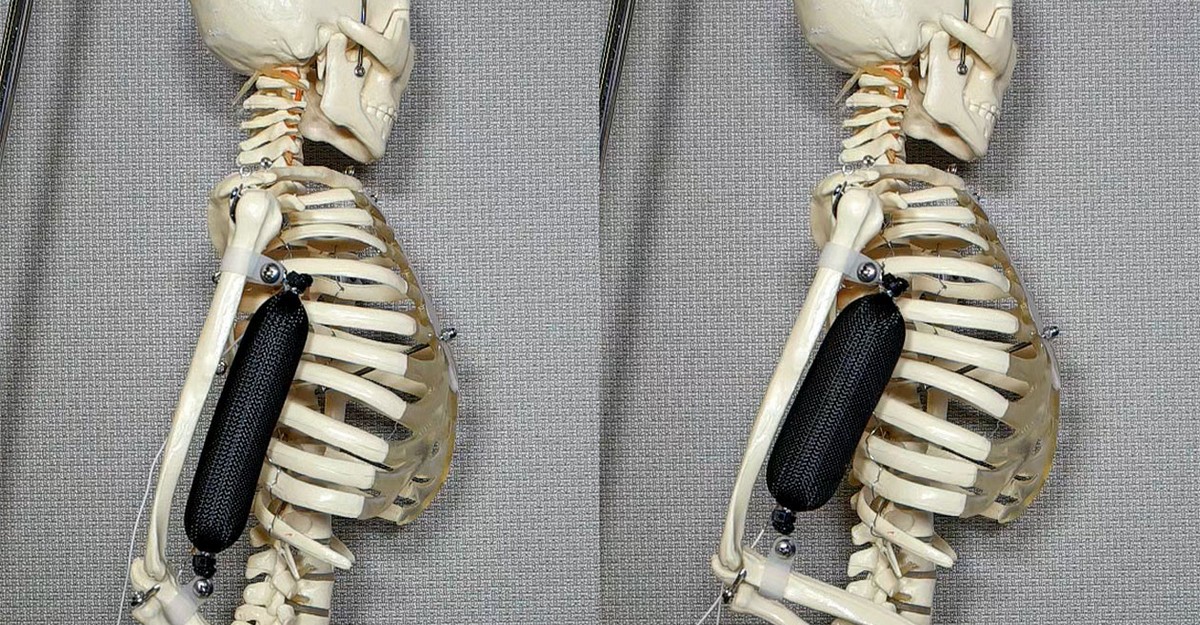 нити, чтобы схватиться за соседнюю тонкую нить и «пройтись» по ней, согласованно изгибаясь и растягиваясь, гидролизуя в процессе огромное количество молекул АТФ. Интересно, что головки миозина могут перемещаться вдоль актиновых филаментов только в одном направлении, и каждая отдельная мышца может сокращаться и расслабляться, но не растягиваться. Их сила исходит от скоординированных действий: простейшее действие, такое как поднятие легкого предмета со стола, требует, чтобы миллиарды миозиновых головок двигались как одна.
нити, чтобы схватиться за соседнюю тонкую нить и «пройтись» по ней, согласованно изгибаясь и растягиваясь, гидролизуя в процессе огромное количество молекул АТФ. Интересно, что головки миозина могут перемещаться вдоль актиновых филаментов только в одном направлении, и каждая отдельная мышца может сокращаться и расслабляться, но не растягиваться. Их сила исходит от скоординированных действий: простейшее действие, такое как поднятие легкого предмета со стола, требует, чтобы миллиарды миозиновых головок двигались как одна.
На базовом уровне мышцы можно описать как биологические исполнительные механизмы. Это название, данное компонентам машин, которые производят и контролируют движение системы; ученые и инженеры, работающие над искусственными мышцами, часто называют их просто приводами. По определению, любой исполнительный механизм требует как источника энергии, так и средства управления движением посредством сигнализации. В случае скелетных мышц источником энергии, конечно же, является АТФ, а управление осуществляется нервной системой.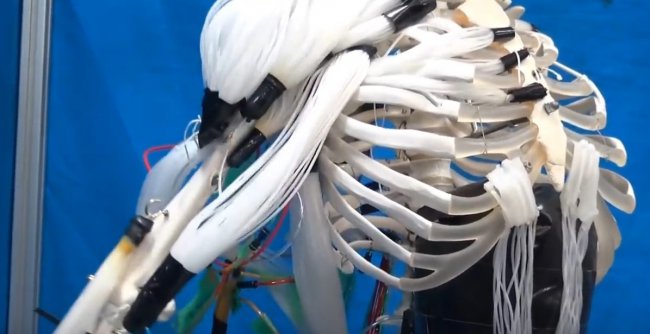
Наше растущее понимание сложной структуры и механизма мышечных волокон на молекулярном уровне, несомненно, вдохновило многие группы, которые сейчас работают над созданием искусственных приводов со свойствами, подобными скелетным мышцам. Однако нет необходимости воспроизводить структуру мышечных волокон на молекулярном уровне или даже близком к нему, чтобы производить материалы с аналогичными или, возможно, достаточно похожими свойствами, чтобы быть полезными. В недавнем обзоре Сейед Мирвакили, исполнительный директор компании Seron Electronics в Ванкувере, Канада и до недавнего времени постдокторант Массачусетского технологического института, описал широкий спектр материалов, включая простые металлы, волокна и пластмассы, которые недавно легли в основу таких приводов. Многие из этих материалов вполне обычные, простые, их можно легко купить у поставщика; свойства, которые позволяют использовать их в качестве искусственных мышц или в них, обусловлены их структурой.
Проводящие волокна с поперечным сечением в десятки нанометров или менее, известные как нанопроволоки, часто используются в приводах. Они могут быть любой длины, но настолько тонкие, что их свойства не могут быть описаны только с помощью традиционной механики, и их называют квантовыми волокнами. Их полезность в качестве исполнительных механизмов проистекает из того факта, что они могут производить движение в ответ на свет, электрические или магнитные поля. Большая часть собственных исследований Миркавелли в области приводов в системах доставки лекарств включала волокна, изготовленные из нанопроволок на основе ниобия. Свойства этого пластичного переходного металла делают его идеально подходящим для клинического использования: он обладает чрезвычайно высокой электропроводностью, химически инертен и поэтому чрезвычайно безопасен для клинического использования и относительно легко доступен. «Ниобий не является редкоземельным элементом, экзотическим или даже особенно дорогим», — говорит Миркавелли. «Он часто используется в более традиционных медицинских устройствах, а некоторые страны использовали его на монетах, потому что он придает красивый цвет поверхности при окислении».
Они могут быть любой длины, но настолько тонкие, что их свойства не могут быть описаны только с помощью традиционной механики, и их называют квантовыми волокнами. Их полезность в качестве исполнительных механизмов проистекает из того факта, что они могут производить движение в ответ на свет, электрические или магнитные поля. Большая часть собственных исследований Миркавелли в области приводов в системах доставки лекарств включала волокна, изготовленные из нанопроволок на основе ниобия. Свойства этого пластичного переходного металла делают его идеально подходящим для клинического использования: он обладает чрезвычайно высокой электропроводностью, химически инертен и поэтому чрезвычайно безопасен для клинического использования и относительно легко доступен. «Ниобий не является редкоземельным элементом, экзотическим или даже особенно дорогим», — говорит Миркавелли. «Он часто используется в более традиционных медицинских устройствах, а некоторые страны использовали его на монетах, потому что он придает красивый цвет поверхности при окислении».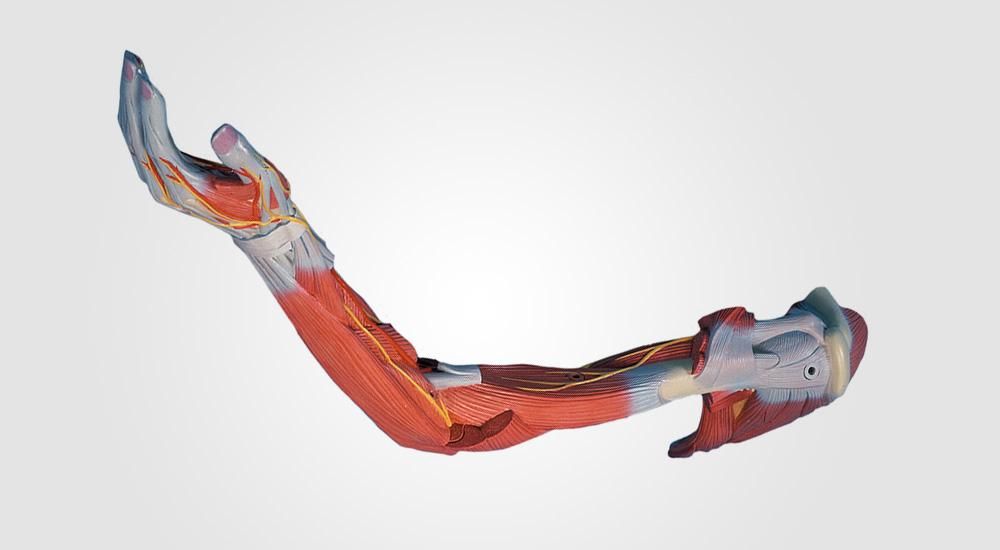 Проводимость этих волокон примерно в 100 раз выше, чем у углеродных нанотрубок, которые использовались в аналогичных устройствах; они также обладают очень высокой емкостью, что означает, что их также можно использовать для создания очень сильных магнитных полей для аппаратов МРТ.
Проводимость этих волокон примерно в 100 раз выше, чем у углеродных нанотрубок, которые использовались в аналогичных устройствах; они также обладают очень высокой емкостью, что означает, что их также можно использовать для создания очень сильных магнитных полей для аппаратов МРТ.
Мягкая сила
Ив Перриар, глава Центра искусственных мышц Федеральной политехнической школы Лозанны в Швейцарии, и его команда разрабатывают так называемые «мягкие приводы» из ковких электроактивных полимеров для клинических применений. Их диэлектрический эластомерный привод (DEA) представляет собой сверхэластичный полимер на основе силикона, зажатый между двумя высоковольтными углеродными электродами и изолированный. «Процесс, который мы используем для производства DEA, настолько чувствителен, что нам приходится начинать заново, если внутрь попадает хотя бы один кусочек пыли», — объясняет он.
Источник: © Jamani Caillet/EPFL
Привод в форме трубки можно закрепить вокруг аорты, чтобы улучшить работу сердца и уменьшить потребность в трансплантатах предназначены для того, чтобы обвивать аорту — главную артерию, которая несет кровь от сердца к телу — и ритмично сокращаться в ответ на электрический сигнал. Следовательно, он будет сдавливать кровеносный сосуд, нагнетая кровь в сердце и тем самым усиливая функцию аорты. С тех пор как Кристиан Барнард провел первую успешную пересадку сердца в Южной Африке в 1967, более 50 000 пациентов пересадили донорское сердце, и в среднем реципиент живет около 15 лет после трансплантации. Однако эта процедура является инвазивной, дорогой и сильно ограничена количеством доступных донорских сердец: даже до пандемии Covid пациентам в Великобритании часто приходилось ждать трансплантации несколько лет. Искусственная мышца, разрабатываемая Перриардом и его командой, предназначена для поддержки больного сердца, отсрочки или даже предотвращения необходимости пересадки. «У нашего устройства есть еще одно существенное преимущество, заключающееся в том, что оно расположено вокруг аорты и поэтому не попадает в камеры сердца или кровоток», — говорит Перриар. «Поэтому операция менее инвазивна, чем операция на открытом сердце, и пациентам не нужно принимать антикоагулянты, чтобы предотвратить свертывание крови вокруг устройства».
Следовательно, он будет сдавливать кровеносный сосуд, нагнетая кровь в сердце и тем самым усиливая функцию аорты. С тех пор как Кристиан Барнард провел первую успешную пересадку сердца в Южной Африке в 1967, более 50 000 пациентов пересадили донорское сердце, и в среднем реципиент живет около 15 лет после трансплантации. Однако эта процедура является инвазивной, дорогой и сильно ограничена количеством доступных донорских сердец: даже до пандемии Covid пациентам в Великобритании часто приходилось ждать трансплантации несколько лет. Искусственная мышца, разрабатываемая Перриардом и его командой, предназначена для поддержки больного сердца, отсрочки или даже предотвращения необходимости пересадки. «У нашего устройства есть еще одно существенное преимущество, заключающееся в том, что оно расположено вокруг аорты и поэтому не попадает в камеры сердца или кровоток», — говорит Перриар. «Поэтому операция менее инвазивна, чем операция на открытом сердце, и пациентам не нужно принимать антикоагулянты, чтобы предотвратить свертывание крови вокруг устройства».
В ходе четырехчасовой операции в апреле 2021 года на аорту живой свиньи был помещен трубчатый привод. Это поддерживало сердцебиение свиньи на протяжении всей операции, позволяя ей более эффективно перекачивать кровь. «Аорта свиньи имеет такой же диаметр, как у человека, и диапазон ее артериального давления такой же, поэтому животное близко к идеальной модели для наших экспериментов», — говорит Перриар. «Однако восходящая аорта — часть, ближайшая к сердцу, где искусственная мышца должна быть расположена для обеспечения наибольшей дополнительной энергии — недостаточно длинна, чтобы вместить ее; теленок был бы более близкой моделью в этом отношении.» До клинических испытаний еще несколько лет, но успех первых испытаний на животных позволил получить еще 8 миллионов швейцарских франков (6,5 миллионов фунтов стерлингов) в виде гранта от Фонда Вернера Сименса для Центр искусственных мышц. И группа Перриарда начинает разработку мягких приводов для двух дополнительных клинических применений: для поддержки функции уретры у пациентов, страдающих недержанием мочи, и для восстановления мимики после инсультов.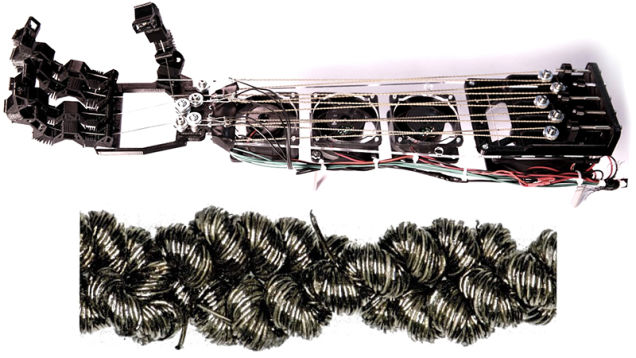
Вдохновение насекомых
Приводы из диэлектрического эластомера сложно изготовить, но они, по крайней мере, достаточно велики, чтобы ими можно было управлять. Хунцян Ван из Южного университета науки и технологий (SUSTech) в Шэнчжэне, Китай, и его коллеги разрабатывают мезомасштабные приводы, вдохновленные биологическими мышцами, в качестве компонентов для роботов размером с насекомое. Обычные электромагнитные двигатели относительно тяжелые, громоздкие, и их трудно встроить в оборудование такого масштаба; Напротив, мышцы насекомых развивались более полумиллиарда лет, чтобы стать прочными, легкими и гибкими. В молекулярном масштабе мышцы насекомых удивительно похожи на мышцы позвоночных. «Эти миниатюрные приводы спроектированы по иерархической схеме, имитирующей биологические мышцы, с массивами миниатюрных электродов, заменяющих нити актина и миозина», — объясняет Ван.
Источник: © Hongqiang Wang group
Команда Хунцян Вана черпала вдохновение в мышцах насекомых, чтобы создать инструмент, который ползает, как дождевой червь (слева), и другой инструмент, который можно использовать в хирургии (справа)
Группа SUSTech разработала двух очень разных миниатюрных роботов в качестве тематических исследований, чтобы проиллюстрировать универсальность своих идей: инструмент для ползания, похожий на дождевого червя, и режущий инструмент, который можно использовать в хирургии. Первый имеет очень маленькое поперечное сечение, что позволяет ему пролезать через узкие щели и может использоваться для осмотра или поисково-спасательных работ в токсичных средах. «Наш робот может быть тонким и гибким, но он удивительно надежен, в большей степени, чем другие инструменты с аналогичным назначением», — добавляет Ван. «Он может даже восстановиться, если вы наступите на него». Режущий инструмент можно использовать в хирургии для удаления опухолей и взятия образцов тканей для биопсии очень точно и точно. Для других потенциальных приложений потребуются роботы, которые могут вести себя, например, как летающие муравьи, и это, вероятно, возможно только потому, что приводы, которые они включают, очень легкие и гибкие.
Первый имеет очень маленькое поперечное сечение, что позволяет ему пролезать через узкие щели и может использоваться для осмотра или поисково-спасательных работ в токсичных средах. «Наш робот может быть тонким и гибким, но он удивительно надежен, в большей степени, чем другие инструменты с аналогичным назначением», — добавляет Ван. «Он может даже восстановиться, если вы наступите на него». Режущий инструмент можно использовать в хирургии для удаления опухолей и взятия образцов тканей для биопсии очень точно и точно. Для других потенциальных приложений потребуются роботы, которые могут вести себя, например, как летающие муравьи, и это, вероятно, возможно только потому, что приводы, которые они включают, очень легкие и гибкие.
Совершенно очевидно, что можно сконструировать материалы, обладающие функциональными свойствами мышц, но почти не обладающие их структурными свойствами, по крайней мере, на микроскопическом уровне; из приводов, описанных здесь, приводы в насекомоподобных роботах Ванга — единственные, которые имеют какие-либо общие черты с микроструктурой скелетных мышц. По мере того, как мы будем узнавать все больше о механизме действия мышечных белков, вполне вероятно, что приводы будут разрабатываться так, чтобы более точно имитировать их структуру. А миозин — лишь один из семейства моторных белков, которые преобразуют химическую энергию, запасенную в АТФ, в движение. Кинезин и более крупный и сложный динеин являются гомологичными белками, которые используют головные домены, чтобы «ходить» в противоположных направлениях вдоль микротрубочек в цитоскелете клетки, захватывая с собой органеллы и макромолекулярные комплексы в качестве «груза». Кинезин играет ключевую роль в митозе или клеточном делении, перемещая клеточные компоненты к противоположным концам клетки перед ее делением; существует несколько классов молекул динеина с различными функциями, включая движение яйцеклеток и сперматозоидов. Некоторые вирусы, в том числе ВИЧ, захватывают динеин и транспортируются к ядрам инфицированных клеток.
По мере того, как мы будем узнавать все больше о механизме действия мышечных белков, вполне вероятно, что приводы будут разрабатываться так, чтобы более точно имитировать их структуру. А миозин — лишь один из семейства моторных белков, которые преобразуют химическую энергию, запасенную в АТФ, в движение. Кинезин и более крупный и сложный динеин являются гомологичными белками, которые используют головные домены, чтобы «ходить» в противоположных направлениях вдоль микротрубочек в цитоскелете клетки, захватывая с собой органеллы и макромолекулярные комплексы в качестве «груза». Кинезин играет ключевую роль в митозе или клеточном делении, перемещая клеточные компоненты к противоположным концам клетки перед ее делением; существует несколько классов молекул динеина с различными функциями, включая движение яйцеклеток и сперматозоидов. Некоторые вирусы, в том числе ВИЧ, захватывают динеин и транспортируются к ядрам инфицированных клеток.
Структуры кинезина и динеина были определены с помощью рентгеновской кристаллографии, метода, который Холмс использовал для получения ранних структур актина и миозина, но в последнее время был достигнут больший прогресс с использованием электронной микроскопии.