Содержание
ИСКУССТВЕННЫЕ МУСКУЛЫ | Наука и жизнь
Наука и жизнь // Иллюстрации
Наука и жизнь // Иллюстрации
‹
›
Открыть в полном размере
Еще не прошло и десяти лет со времени открытия
экзотических структур — углеродных нанотрубок, но они продолжают удивлять
исследователей. Углеродные нанотрубки — тончайшие листочки хорошо известного
графита, свернутые в трубку диаметром от 0,7 до 1,5-2,0 нм и длиной до
нескольких микрон (см. «Наука и жизнь» № 11, 1993 г.).
Высокая прочность углерод-углеродной связи,
малые размеры, сетчатое строение оболочек нанотрубок (они состоят из связанных
шестиугольников) и отсутствие дефектов обеспечивают их необычные механические
свойства: они в 10-12 раз прочнее и в 6 раз легче стали. Нить диаметром
1 мм из таких нанотрубок могла бы выдержать
20-тонный груз, в сотни миллиардов раз больший ее собственного веса. А
диаметр одиночной нанотрубки столь мал (в 50 тысяч раз меньше диаметра
человеческого волоса), что нанокабель от Земли до Луны можно было бы намотать
на катушку размером с маковое зернышко.
Все это вызывает немалый энтузиазм материаловедов,
которые недавно вспомнили, например, даже о фантастической идее американского
писателя Артура Кларка связать подъемником с Землей космический корабль
на геостационарной орбите.
Необычные электронные свойства углеродных
нанотрубок вот-вот найдут применение в первых дисплеях с полевыми эмиттерами
и в туннельных микроскопах, они вызвали большую серию работ в попытках
создать молекулярный транзистор, размер которого был бы на несколько порядков
меньше самых миниатюрных из ныне существующих электронных приборов.
Еще одну область их использования наметило
сообщение, ставшее научной сенсацией.
В феврале — марте 1999 г. в городке Кирхберг,
что в Тироле (Австрия), состоялась 13-я Международная зимняя школа по электронным
свойствам новых материалов. Среди довольно большого числа докладов по нанотрубкам
общее внимание привлек доклад международной исследовательс кой группы сотрудников
во главе с Рэем Баухманом (Ray Baughman), сотрудником компании «Эллайд
Сигнел» (Allied Signal). Доклад был посвящен созданию искусственных мускулов
Доклад был посвящен созданию искусственных мускулов
и позднее изложен в статье, опубликованной в журнале «Сайенс» (Science,
1999. v. 284, N. 5418, p. 1340-1344, May 21).
Создать искусственные мускулы пытаются
давно, и для решения этой задачи просматривались несколько путей. Можно,
например, использовать пьезоэффект: изменение размеров кристалла или керамики
при наложении электрического напряжения. Можно «играть» на способности
слоистых веществ расширяться в направлении, перпендикулярном плоскости
слоев, при внедрении между слоями химикатов. Но эти пути либо сложны, либо
малоэффективны.
В группе Баухмана использовали иной принцип.
Углеродные нанотрубки можно получать в виде листочков нанобумаги, в которых
трубки перепутаны, переплетены друг с другом. Такую нанобумагу можно брать
в руки, разрезать на полосы. Первые эксперименты были на удивление просты.
Исследователи приклеили две полоски нанобумаги
к противоположным сторонам липкой ленты, присоединили к концам электроды
и опустили в солевой раствор, обеспечивающий электропроводность. При включении
При включении
электрической батареи, дающей напряжение в несколько вольт, обе полоски
нанобумаги слегка удлинились, но связанная с отрицательным полюсом батареи
удлинилась больше, и они изогнулись. Искусственный мускул (актюатор) действовал.
Конечно, такое устройство слишком примитивно,
чтобы уже сегодня использовать его вместо бицепсов и трицепсов. Но уже
ясно, что эта конструкция гораздо более перспективна, чем любая другая.
Вместо солевого раствора предполагается применять проводящий полимер, создав
легкий и прочный композитный материал.
Уже показано, что искусственные мускулы
будут по меньшей мере втрое «сильнее» обычных, то есть смогут выдерживать
гораздо большие нагрузки при тех же размерах. В отличие от металлов углеродные
нанотрубки не разрушаются от усталости, могут работать при довольно высоких
температурах. А используемые для их работы напряжение и сила тока невелики.
Искусственные мускулы со временем можно
будет использовать для протезирования органов и отдельных мышц (скажем,
сердечной). На их основе легко удастся сконструировать «руки» и «пальцы»
На их основе легко удастся сконструировать «руки» и «пальцы»
роботов, работающих в космическом холоде или в 1000-градусную жару, в вакууме
и в среде агрессивных газов.
Углеродные мускулы можно использовать и
для производства энергии, поскольку, по словам Баухмана, эффект обратим:
сгибание и разгибание полосок создают электрический потенциал. Соединенные
в цепь элементы могут использовать энергию волн, приливов и отливов в электростанциях
нового типа. Каждый автомобиль можно будет со временем снабдить легким
устройством, которое при торможении станет подзаряжать аккумуляторы.
Искусственные мышцы, которым позавидовал бы сам Терминатор
Высокие технологии, Медицина, Наука, Новости, Познавательное, Техника и механика
Оставить комментарий
Учёные представили инновационные искусственные мышцы, которые в сто раз сильнее человеческих. Три независимые группы исследователей разработали собственные варианты, различающиеся материалами и сферами применения.
Getty Images
Все синтетические мышцы имеют общую черту – как правило, они представляют собой упругие волокна, которые растягиваются и сокращаются, как и их природный аналог. Пионером в разработке искусственных мышц признан Рэй Боуман, директор Института нанотехнологий Техасского университета. На первых этапах исследования Боуман и его команда работали с самыми привычными материалами, которые можно найти в любом доме – нитками для шитья и леской. Они стремились доказать и наглядно продемонстрировать, что даже базовые материалы могут образовать подобные мышцам структуры. В ходе лабораторных испытаний техасцы пришли к наилучшим, на их взгляд, материалам для формирования волокон искусственных мышц – шёлку и бамбуку.
Учёные также разработали специальную оболочку, которая реагирует на электрохимические и температурные колебания. Покрытые этой оболочкой волокна сокращаются и двигаются подобно тому, как двигаются человеческие мышцы под воздействием внешних раздражителей. Подобный вариант синтетических мышц может найти применение в производстве умной одежды. Например, помещённые внутрь ткани мышечные волокна могут автоматически расширять «поры» материала в ответ на повышенную влажность или повышение температуры тела.
Подобный вариант синтетических мышц может найти применение в производстве умной одежды. Например, помещённые внутрь ткани мышечные волокна могут автоматически расширять «поры» материала в ответ на повышенную влажность или повышение температуры тела.
Science | AAAS
Исследователи из Университета Бордо разработали собственный вариант искусственной мышцы из эластичного полимера и графена. Их синтетическая мышца напоминает высокотехнологичный аналог резиновой ленты, используемой в резиномоторных авиамоделях. Главный научный сотрудник проекта Джинкай Юань и его коллеги постарались над тем, чтобы эту «резинку» не приходилось скручивать после каждого растяжения: комбинация графена и полимера в составе волокна позволяет создать «эффект памяти». Эластичный полимер может растягиваться и сжиматься, но контроль степени сокращения происходит через проводящий ток графеновый слой. Юань предполагает, что подобный концепт имеет потенциал в медицине, например, такие волокна можно использовать для управления работой миниатюрных клапанов внутри медицинских приборов.
Science | AAASScience | AAAS
В отличие от графеново-полимерных волокон, которые приводятся в движение при помощи электричества, принцип действия синтетических мышц, разработанных учёными из Массачусетского Технологического Института гораздо ближе к человеческим. Команда МТИ во главе с Мехметом Каником представила волокна из полиэтилена высокой плотности и эластомера. При нагревании тепло распространяется по волокнам равномерно, но из-за разницы коэффициентов теплового расширения один из полимеров быстро сокращается, а второй удерживает его от хаотичного сжатия, заставляя завиваться в виде спирали. Вдохновением для исследователей послужили растительные побеги-усики огурцов, которые сокращаются, регулируя давление в клетках. Сокращение волокна происходит даже при незначительных колебаниях температуры, потому материал не страдает от резких перепадов температуры и не теряет свои свойства даже после десяти тысяч циклов сжатия. При этом такая искусственная мышца может поднимать грузы, масса которых в 650 раз превышает её собственный.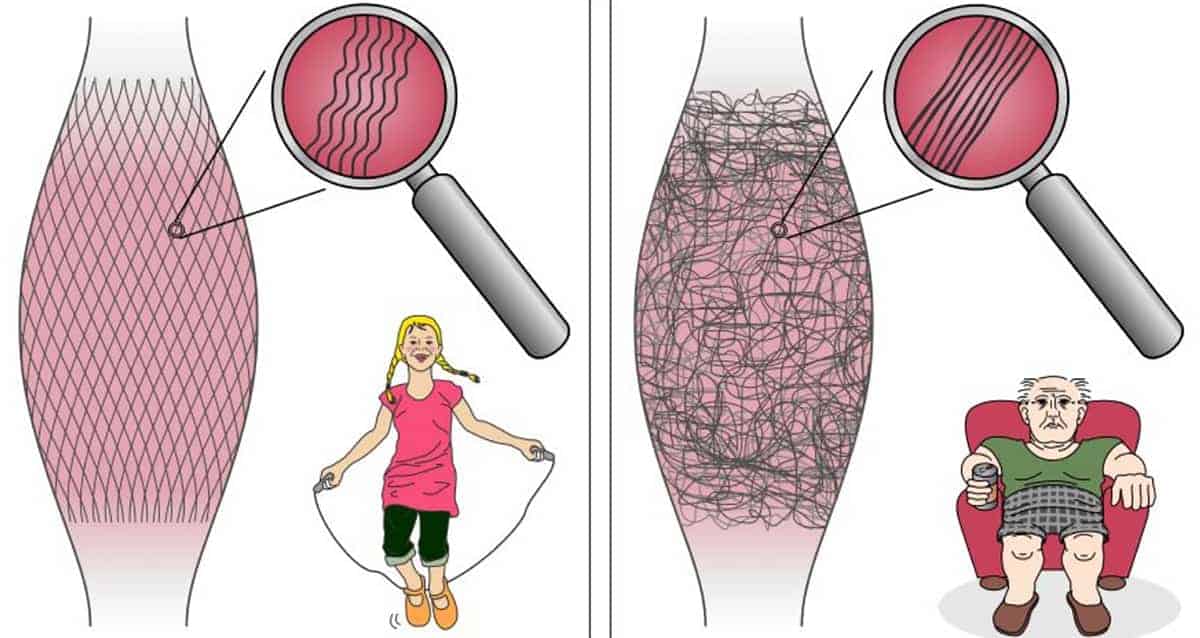
В ходе лабораторных тестов специалисты экспериментировали с различными температурами: при нагревании волокна на 14°C общая длина нитей сократилась на 50%. Кроме того, исследователи попытались использовать синтетические мышцы для управления маленькой роботической рукой. Разогревая и охлаждая волокна они заставляли руку поднимать и перемещать небольшие грузы. Более того, изменяя расположение и соотношение нитей из разных материалов внутри полотна, учёные смогли управлять направлением движения. Силу сокращений также можно регулировать, изменяя пропорции и диаметр нитей исходных полимеров.
Polina Anikeeva (MIT)Science | AAAS
На данном этапе работ искусственные мышцы значительно уступают настоящим в плане эффективности их работы. Сегодня даже самые совершенные синтетические мышечные волокна преобразовывают в полезную работу не больше 3-5% затраченной энергии, оставшаяся энергия теряется в виде тепла. Если инженеры и биотехники преуспеют в устранении потерь энергии, возможности применения синтетических мышц будут безграничными: начиная от умной одежды и протезов до робототехники и экзоскелетов.
Если инженеры и биотехники преуспеют в устранении потерь энергии, возможности применения синтетических мышц будут безграничными: начиная от умной одежды и протезов до робототехники и экзоскелетов.
Dan Robitzski
Поделиться в соцсетях
биотехнологияИнститут нанотехнологий Техасского университетаискусственные мышцыМТИУниверситет Бордо
Найти:
Skybrators: безлопастные ветрогенераторы от Vortex Bladeless
Virgin Galactic показала интерьер корабля класса SpaceShipTwo
Самые необычные здания в мире (Часть-2)
Биржа Crypto.com случайно отправила пользователю A$10,5 млн
Intel представила дискретную видеокарту Iris Xe для настольных ПК
Чудеса древнегреческой инженерной мысли (часть 1)
Тайны великой пустыни Сахара ?️
8 ноября: Международный день радиологии
Многообразие виски: сорта, виды и особенности производства
Hornsea One: крупнейшая шельфовая ветряная электростанция в мире
Дом, в котором родился Гитлер, станет полицейским участком
Наскальная живопись пещеры Куэва-де-Ардалес
Новый сервис Uber Copter в Нью-Йорке — такси на вертолете.

Deep Dive Dubai: самый глубокий бассейн в мире
Boeing 2707 — американский Конкорд, который «не взлетел»
K2-141b: лавовая планета с каменными дождями и сверхзвуковыми ветрами
Планшеты с большим экраном: топ моделей для всех задач
На янтарь пыль садится, да он не грязнится
Старейшая в мире жемчужина «Абу-Даби»
Самый дешевый электромобиль добрался до Европы — Freze Nikrob

новая методика изготовления мягких актуаторов для робототехники
Новости
Подпишитесь на автора
Подписаться
Не хочу
18
Исследователи из Колумбийского университета в Нью-Йорке изобрели искусственные мышцы, способные поднимать грузы в тысячи раз тяжелее собственной массы. Методика изготовления настолько проста, а материалы настолько доступны, что заняться конструированием мягкой робототехники может любой желающий, особенно если в наличии имеется 3D-принтер.
Несмотря на сногсшибательные успехи пермских инженеров, до настоящих «терминаторов» человечеству еще далеко. Алгоритмы постоянно совершенствуются, машины становятся все умнее – настолько, что искусственного интеллекта начинает побаиваться даже Илон Маск. А вдруг Теодор Качинский был прав? Но вот «железо» развивается куда более медленными темпами, чем «софт». Механические, пневматические и гидравлические актуаторы слишком сложны, да и зачастую ненадежны, материалы с эффектом памяти формы дороги и неэффективны, а электроактивные полимеры требуют относительно высоких энергетических затрат. Чем же приводить в движение андроидов будущего?
Свой вариант предложил доктор наук Аслан Мирийев, научный сотрудник лаборатории Creative Machines при Колумбийском университете. Идея заключается в изготовлении искусственных мышц из силиконовых эластомеров, насыщенных обычным питьевым спиртом. Этиловый спирт (хотя необязательно этиловый) играет ключевую роль, так как расширение и сокращение мышц происходит в результате перехода микрокапель этанола из жидкой фазы в газообразную и обратно. Достигается это за счет нагревания и охлаждения: испарение пойманного в силиконе спирта приводит к росту давления и, соответственно, расширению эластомерной конструкции.
Достигается это за счет нагревания и охлаждения: испарение пойманного в силиконе спирта приводит к росту давления и, соответственно, расширению эластомерной конструкции.
Необходимая температура задается пронизывающим мышцу линейным или спиральным электрическим нагревательным элементом. При использовании этанола максимальный эффект достигается продолжительным нагреванием чуть выше точки кипения в 78,4°С. Насколько выше, зависит от состава используемого материала, ведь силикон будет сопротивляться расширению, а чем выше плотность материала, тем выше давление и температура кипения спирта. В своих опытах Аслан остановился на материале с 20-процентным содержанием этанола, как на оптимальном.
Изготавливается смесь простым смешиванием силикона и этанола в необходимых пропорциях до равномерного распределения микропузырьков спирта. Затем смесь можно использовать для литья в формы или аддитивного производства методом робокастинга, то есть экструзионной 3D-печати, но без нагревания. Например, шприцевым экструдером. В ходе экспериментов искусственные мышцы продемонстрировали способность увеличиваться в объеме на 900% и выдерживать многократные нагрузки. Так, шестиграммовый образец тридцать раз подряд поднимал и опускал груз массой около шести килограммов, то есть в тысячу раз больше собственной! Максимальные же показатели и того выше: двухграммовый мускул осилил нагрузку в 12 кг, хотя и на пределе возможностей.
Например, шприцевым экструдером. В ходе экспериментов искусственные мышцы продемонстрировали способность увеличиваться в объеме на 900% и выдерживать многократные нагрузки. Так, шестиграммовый образец тридцать раз подряд поднимал и опускал груз массой около шести килограммов, то есть в тысячу раз больше собственной! Максимальные же показатели и того выше: двухграммовый мускул осилил нагрузку в 12 кг, хотя и на пределе возможностей.
Пока все замечательно, но ведь мышцы должны сокращаться, а не расширяться? Ничего страшного. Рабочий вектор можно задавать оболочками, сдерживающими расширение в заданной плоскости. Например, бицепсы и трицепсы на иллюстрации выше заключены в сетку фиксированной длины, прикрепленную концами к плечу и предплечью. Диаметральное расширение приводит к продольному сокращению, как это происходит с настоящими мускулами. В этом примере использовались 13-граммовые мышцы, способные поднимать вес до одного килограмма при нагревании спиральным элементом из нихромовой проволоки под напряжением 30В с силой тока в 1,5А. Изгиб же можно задавать с помощью «пассивных» слоев из гибких материалов с относительно высоким сопротивлением на растяжение, наносимых на «внутреннюю» сторону деформируемого актуатора, как в примере с захватом на иллюстрации ниже.
Изгиб же можно задавать с помощью «пассивных» слоев из гибких материалов с относительно высоким сопротивлением на растяжение, наносимых на «внутреннюю» сторону деформируемого актуатора, как в примере с захватом на иллюстрации ниже.
Лабораторная стоимость изготовления таких мышц в пересчете на грамм не превышала трех центов. Для печати опытных конструкций из термопластов использовались настольные FDM 3D-принтеры Ultimaker, Ultimaker 2+ и Stratasys uPrint, тогда как печать непосредственно искусственных мышц осуществлялась на самодельном двухэкструдерном 3D-принтере, оснащенном шприцевыми головками. С полным докладом можно ознакомиться по этой ссылке.
А у вас есть интересные новости? Поделитесь с нами своими разработками, и мы расскажем о них всему миру! Ждем ваши идеи по адресу news@3Dtoday. ru.
ru.
Подпишитесь на автора
Подписаться
Не хочу
18
Еще больше интересных статей
13
Подпишитесь на автора
Подписаться
Не хочу
В прошлую субботу, 24 сентября, в Санкт-Петербурге состоялся третий фестиваль 3D-печати 3Dtoday Fest…
Читать дальше
4
Подпишитесь на автора
Подписаться
Не хочу
Российский производитель 3D-принтеров «Импринта» принял участие в Восточном экономическом форуме, пр…
Читать дальше
59
Подпишитесь на автора
Подписаться
Не хочу
Портал 3Dtoday при поддержке компаний Creality и Bestfilament приглашает всех желающих к участию в к. ..
..
Читать дальше
Ученые создали прочнейшие искусственные мышцы (видео)
Австралийские ученые изобрели искусственные мышцы, которые могут сокращаться в десятки раз сильнее человеческих, передает Tengrinews.kz.
Исследователи создали их из полиэфирных нитей, пропитанных специальным раствором. Результаты эксперимента опубликованы в журнале Robotics Science.
Ученые ориентировались на явление сверхспирализации, когда двойная спираль ДНК внутри клеток организма закручивается в еще более сложную спираль, сокращая свою длину примерно в тысячу раз. Оказалось, что такого же эффекта можно добиться на скрученных синтетических волокнах, если обеспечить им особые условия.
Исследователи скрутили нити попарно, пропитали гидрогелем и погрузили в воду. Получившиеся искусственные волокна сократились в длине на 90 процентов с энергией в один джоуль на грамм. При этом человеческие мышцы способны сокращаться только на 20 процентов с энергией порядка 0,03 джоуля на грамм.
По словам исследователей, полученные синтетические мышечные волокна можно использовать в протезах и роботизированных конечностях.
Новый тип искусственных мышц похож на итальянскую пасту, но гораздо прочнее
Инженеры-механики разрабатывают новую высокоэффективную технологию искусственных мышц. Последние достижения в этой области опубликованы в статье для Science Robotics.
В области робототехники исследователи постоянно ищут самые быстрые, мощные, эффективные и недорогие способы дать роботам возможность двигаться. Поиск новых и более совершенных технологий (особенно в «мягкой» робототехнике) часто основан на принципах биомиметики. Инженеры стремятся не только имитировать движение человеческих мышц, но и превзойти их.
Доцент Майкл Шафер и профессор Хайди Фейгенбаум с факультета машиностроения Университета Северной Аризоны вместе с аспирантом-исследователем Диего Хигуэрас-Руисом провели совместную работу. Они создали новую высокоэффективную технологию искусственной мускулатуры.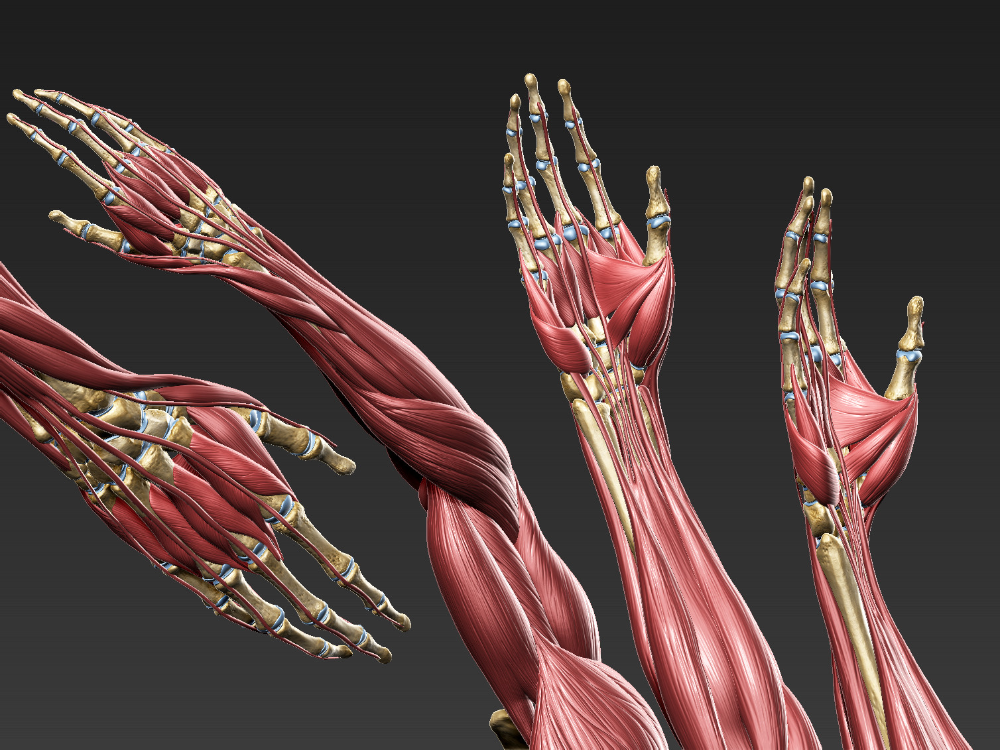 Она дает роботам более человеческие движения благодаря своей гибкости и адаптируемости, но превосходит человеческие скелетные мышцы по нескольким параметрам.
Она дает роботам более человеческие движения благодаря своей гибкости и адаптируемости, но превосходит человеческие скелетные мышцы по нескольким параметрам.
Инженеры назвали новые линейные приводы «искусственными мышцами cavatappi» из-за их внешнего сходства с итальянской пастой.
Паста Cavatappi (A) и приводы, разработанные (CH) из простых вытянутых полимерных трубок (B). Предоставлено: Университет Северной Аризоны
Благодаря спиральной конструкции приводы могут генерировать больше энергии. Это делает их идеальной технологией для применения в биоинженерии и робототехнике. Удельные показатели работы и мощности искусственных мышц «каватаппи» оказались в десять и пять раз выше соответственно, чем у человеческих скелетных мышц. По мере развития технологии ученые ожидают и более высоких уровней производительности.
Искусственные мышцы cavatappi основаны на скрученных полимерных приводах. Они были довольно революционными, когда появились впервые из-за их мощности, легкости и дешевизны. Но они были очень неэффективными и медленными в работе, потому что их нужно было нагревать и охлаждать. Кроме того, их эффективность составляет всего около 2%. В случае с cavatappi ученые обошли это, используя жидкость под давлением для приведения конструкций в действие.
Но они были очень неэффективными и медленными в работе, потому что их нужно было нагревать и охлаждать. Кроме того, их эффективность составляет всего около 2%. В случае с cavatappi ученые обошли это, используя жидкость под давлением для приведения конструкций в действие.
Армия США оснастит своих боевых роботов живыми мышцами
Инженеры-робототехники Army Research Laboratory (США) изучают возможность интеграции в боевых роботов «живых» мышц для осуществления двигательных функций вместо механических рук, колес и гусениц.
Как показывают исследования, при всех своих неоспоримых достоинствах возможности вышеперечисленной механики, приводимой в действие электродвигателями, ограничены. По замыслу военных разработчиков, на смену механическим могут прийти биогибридные роботы, которые способны двигаться за счет сокращений органической мышечной ткани, выращенной в лаборатории. Активировать работу таких мускулов будут электрические импульсы или химическое воздействие.
Главное преимущество искусственных мышц и сухожилий – гибкость, они могут сгибаться, растягиваться и тянуться. Прекрасный пример – бег животных по пересеченной местности, когда им приходится преодолевать неожиданные препятствия, реагируя на них практически мгновенно. Гусеничный или колесный робот такими возможностями не обладает.
Ученые нашли способ поддерживать тонус мышц без тренировок
Ученые университета штата Мичиган выяснили, как поддерживать тонус мышц без упражнений. Результаты исследования опубликованы в журнале Nature Communications, сообщает Tengrinews.kz.
Ученые, проводя эксперименты на мухах-дрозофилах и мышах, обнаружили белок сестрин, от которого зависят выносливость организма и эффективность физических упражнений.
В ходе исследования специалисты заставляли мух двигаться по «беговой дорожке» — пробирке с наклонной поверхностью, которую робот периодически встряхивал, и сравнивали результаты обычных мух и насекомых с «выключенным» геном сестрина.
Выяснилось, что после интенсивных «физических упражнений» клетки мышц обычных мух вырабатывали большое количество сестрина. Эти белки делали клетки более чувствительными к действию инсулина и благоприятно влияли на метаболические процессы. Кроме того, мухи с повышенным уровнем сестрина в мышцах даже без «тренировок» оставались «в форме».
Насекомые с «выключенным» сестрином не только обладали худшей выносливостью, у них снижалась аэробная функция дыхания и отсутствовал эффект сжигания жиров, связанный с физическими занятиями.
Полученные результаты открывают путь для дальнейших исследований, которые могут иметь реальный практический эффект. По мнению ученых, сестрин способен предотвращать атрофию мышц при длительной иммобилизации, а также бороться со старческим истощением.
При этом ученые замечают, что до создания препарата или пищевой добавки, содержащей сестрин, еще очень далеко.
Искусственная мышца — HiSoUR История культуры
Искусственный мускул — это общий термин, используемый для приводов, материалов или устройств, которые имитируют естественную мышцу и могут реверсивно сжиматься, расширяться или вращаться внутри одного компонента из-за внешнего раздражителя (например, напряжения, тока, давления или температуры). Три основных реакции срабатывания — сжатие, расширение и вращение — могут быть объединены вместе в одном компоненте для создания других типов движений (например, изгиб путем сжимания одной стороны материала при расширении другой стороны). Обычные двигатели и пневматические линейные или поворотные приводы не квалифицируются как искусственные мышцы, потому что в приведении в действие участвует более одного компонента.
Благодаря своей высокой гибкости, универсальности и соотношению мощности к весу по сравнению с традиционными жесткими приводами, искусственные мышцы могут стать чрезвычайно разрушительной технологией. Хотя в настоящее время в ограниченном использовании технология может иметь широкие будущие приложения в промышленности, медицине, робототехнике и многих других областях.
обзор
К ним относятся не только те, которые имитируют фактическую структуру мышечной массы биотехнологией, но и приводы, которые генерируют энергию, изменяя состояние, потребляя электрическую, магнитную или химическую энергию.
Существуют различные типы искусственных мышц, таких как пьезоэлектрический тип, сплав с памятью формы, электростатический тип, пневматический тип и т. П., Но в последнее время привлекают внимание те, кто использует полимер, такой как синтетическая смола. Говорят, что это мягкий привод, потому что материал, который будет использоваться, является мягким, движение является гибким, а также поддерживает внешние силы.
В механическом устройстве существует тенденция выводить заданный импульс по отношению к входной энергии, но если физическое существование какого-либо ограничения будет нарушено, барьер или само механическое устройство будут повреждены. В искусственной мышце, хотя осуществление осуществляется с определенной шириной по отношению к входной энергии, в то же время, когда сила вводится снаружи или заданный импульс не может быть выставлен, этот сам блок питания генерирует избыточный импульс в форма искажения Считается, что он имеет функцию предотвращения поглощения, разрушения оборудования и повреждения объекта.
Эти «мягкие» источники питания могут временно налагать энергию на то, что механический крутящий момент чрезмерно потребляется из-за трения внутри и снаружи механизма, в форме эластичности, поэтому мы разработали более эффективное устройство. Помимо того, что элементы и конструкции машины не генерировать энергию, но сам материал является источником питания, можно сказать, что он полезен для миниатюризации устройства.
Однако с 2010 года, как и для материалов, используемых в качестве искусственных мышц, многие пьезоэлектрические и полимерные материалы находятся на стадии разработки и исследования, многие из них не могут быть массово произведены по низкой цене. • Невозможно преобразовать входную энергию в импульс. Приложения к продукты, продаваемые как обычно используемые продукты, ограничены из-за низкой эффективности преобразования и проблем со стойкостью к давлению / долговечности, кажется, что для распространения требуется время. Функция в качестве исполнительного устройства может быть достигнута путем применения принципа коммерчески доступного компактного двигателя, линейного двигателя (в том числе двигателя звуковой катушки) и т. Д., Это можно использовать в качестве недорогих существующих продуктов, доступных в виде модулей. Продукты, которые используют их, являются основными, потому что они могут.
Сравнение с естественными мышцами
Хотя нет общей теории, позволяющей сравнивать приводы, существуют «критерии мощности» для искусственных мышечных технологий, которые позволяют специфицировать новые технологии приводов по сравнению с природными мускульными свойствами. Таким образом, критерии включают напряжение, деформацию, скорость деформации, срок службы и модуль упругости. Некоторые авторы рассмотрели другие критерии (Huber et al., 1997), такие как плотность привода и разрешение деформации. С 2014 года самые мощные искусственные мышечные волокна могут обеспечить стократное увеличение мощности над эквивалентными длинами натуральных мышечных волокон.
Исследователи измеряют скорость, плотность энергии, мощность и эффективность искусственных мышц; ни один тип искусственной мышцы не является лучшим во всех областях.
Типы
Искусственные мышцы можно разделить на три основные группы, основанные на их механизме срабатывания.
Приведение электрического поля
Электроактивные полимеры (EAP) представляют собой полимеры, которые могут приводиться в действие посредством применения электрических полей. В настоящее время наиболее видными EAP являются пьезоэлектрические полимеры, диэлектрические приводы (DEA), электрострикционные эластомеры, жидкие кристаллические эластомеры (LCE) и сегнетоэлектрические полимеры. Несмотря на то, что эти EAP можно изгибать, их малые мощности для крутящего момента в настоящее время ограничивают их полезность в качестве искусственных мышц. Более того, без принятого стандартного материала для создания устройств EAP коммерциализация оставалась непрактичной. Однако с 1990-х годов в технологии ПДООС достигнут значительный прогресс.
Ионное управление
Ионные EAP представляют собой полимеры, которые могут быть активированы путем диффузии ионов в растворе электролита (в дополнение к применению электрических полей).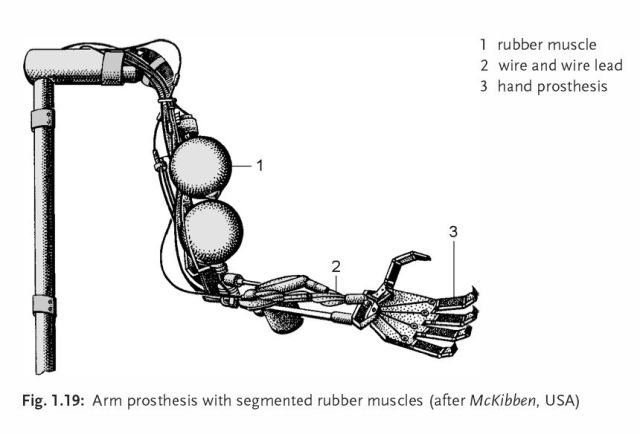 Текущие примеры ионных электроактивных полимеров включают полиэлектродные гели, иономерные полимерные металлические композиты (IPMC), проводящие полимеры и электрореологические жидкости (ERF). В 2011 году было продемонстрировано, что скрученные углеродные нанотрубки могут также приводиться в действие путем применения электрического поля.
Текущие примеры ионных электроактивных полимеров включают полиэлектродные гели, иономерные полимерные металлические композиты (IPMC), проводящие полимеры и электрореологические жидкости (ERF). В 2011 году было продемонстрировано, что скрученные углеродные нанотрубки могут также приводиться в действие путем применения электрического поля.
Приведение в действие электропитания
Скрученные и спиральные полимерные (TCP) мышцы, также известные как сверхпрочный полимер (SCP), представляют собой спиральный полимер, который может приводиться в действие электрической энергией. Мускул TCP похож на спиральную пружину. Тренировочные мышцы обычно изготавливаются из нейлона с серебряным покрытием. Мышцы TCP также могут быть изготовлены из другого покрытия с электропроводностью, такого как золото. Мускулы TCP должны находиться под нагрузкой, чтобы поддерживать растяжение мышц. Электрическая энергия преобразуется в тепловую энергию из-за электрического сопротивления, которое также известно как джоулево нагревание, омическое нагревание и резистивный нагрев. По мере того как температура мышц TCP увеличивается при нагревании Джоулем, полимер сжимается, и это вызывает сокращение мышц.
По мере того как температура мышц TCP увеличивается при нагревании Джоулем, полимер сжимается, и это вызывает сокращение мышц.
Пневматическое приведение в действие
Пневматические искусственные мышцы (PAM) работают, наполняя пневматический пузырь сжатым воздухом. При приложении давления газа к мочевому пузырю происходит изотропное расширение объема, но оно ограничено плетеными проводами, которые окружают пузырь, переводя объемное расширение на линейное сжатие вдоль оси исполнительного механизма. PAM можно классифицировать по их работе и дизайну; а именно, PAM имеют пневматическое или гидравлическое управление, избыточное давление или работу под давлением, плетеные / сетчатые или внедренные мембраны и растягивающие мембраны или перестраивающие мембраны. Среди наиболее часто используемых PAM сегодня — цилиндрическая плетеная мышца, известная как Musk McKibben, которая была впервые разработана JL McKibben в 1950-х годах.
Тепловое управление
Леска
Искусственные мышцы, изготовленные из обычной лески и швейной нитки, могут поднимать в 100 раз больше веса и вырабатывать в 100 раз больше энергии, чем человеческие мышцы одинаковой длины и веса.
Искусственные мышцы, основанные на леске, уже на порядок меньше (на фунт), чем сплав с памятью формы или углеродной нанотрубкой; но в настоящее время относительно низкая эффективность.
Отдельные макромолекулы выровнены с волокном в коммерчески доступных полимерных волокнах. Наматывая их на катушки, исследователи делают искусственные мышцы, которые сжимаются со скоростью, подобной человеческим мускулам.
A (раскрученное) полимерное волокно, такое как полиэтеленовая леска или нейлоновая швейная нить, в отличие от большинства материалов, сокращается при нагревании до около 4% для повышения температуры на 250 K. Закручивая волокно и наматывая закрученное волокно в катушку, нагрев затягивает катушку и сокращает ее до 49%. Исследователи обнаружили другой способ намотки катушки, так что нагрев увеличивает катушку на 69%.
Одним применением термически активированных искусственных мышц является автоматическое открытие и закрытие окон, реагирование на температуру без использования какой-либо мощности.
Крошечные искусственные мышцы, состоящие из скрученных углеродных нанотрубок, наполненных парафином, в 200 раз сильнее, чем человеческая мышца.
Сплавы с памятью формы
Пластинчатые сплавы (SMAs), жидкие кристаллические эластомеры и металлические сплавы, которые могут быть деформированы, а затем возвращены в исходную форму при воздействии тепла, могут функционировать как искусственные мышцы. Искусственные мышцы на основе теплового привода обеспечивают теплостойкость, ударопрочность, низкую плотность, высокую усталостную прочность и большую силу при изменении формы. В 2012 году был продемонстрирован новый класс активированных электрическим полем искусственных мышц, не содержащих электролит, называемых «витыми нитями», на основе теплового расширения вторичного материала в проводящей скрученной структуре мышцы. Было также продемонстрировано, что намотанная лента из диоксида ванадия может скручиваться и раскручиваться при максимальной скорости кручения 200 000 об / мин.
Искусственная мышца с использованием полимера
Электрический реактивный полимер (английская версия) (Electroactive Polymers: EAP)
Ионная проводящая полимерная пленка (ICPF: ионная проводящая полимерная пленка)
В 1991 году он был изобретен Keisuke Oguchi (Осакский научно-исследовательский институт промышленных технологий, Национальный институт передовых промышленных наук и технологий, бывший AIST) и другие.
Благородный металл (золото, платина), химически покрытый с обеих сторон пленки перфторсульфоновой кислоты (PFS), и изгиб с высокой скоростью, когда напряжение подается на оба боковых электрода.
Искусственная мышца с использованием пневматического давления
Пневматические искусственные мышцы (PAM)
Тип McKibben (искусственная мышца)
В 1961 году он был разработан Джозефом Маккиббеном.
Он имеет форму резиновой трубки, покрытой нейлоновым волокном, и сжимается сжатым воздухом внутри.
Origami Robot, разработанный MIT Computer Science и лабораторией искусственного интеллекта (CSAIL). Искусственные мышцы, сочетающие структуру оригами и вакуумную упаковку. Вытягивая воздух внутри вакуумной упаковки, внутренняя складная бумага также деформирует сцепление и становится скелетом.
Искусственные мышцы с использованием электричества и магнетизма
Использование электрореологической жидкости
Использование магнитной вязкой жидкости (магнитореологической жидкости)
Использование электростатического притяжения
В качестве искусственной мускулатуры также можно применять исполнительный механизм, использующий электростатическое усилие, например, «электростатический двигатель большой мощности» при исследованиях и разработках лаборатории Higuchi • Yamamoto Университета Токио.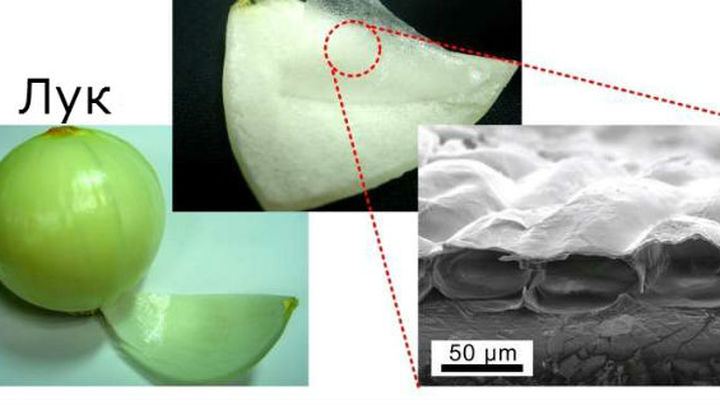 Видео электроактивных полимеров в действии
Видео электроактивных полимеров в действии
Мышечное волокно УНТ
В Научно-исследовательском институте нанотехнологий Техасского университета в Далласе была разработана искусственная мышца, структурированная с контрактом путем добавления напряжения около 5 кВ в обработанную углеродную нанотрубку. Искусственная мышца имеет лишь немного более тяжелую плотность, чем воздух, имеет быструю скорость сокращения и в 30 раз больше энергии на площадь, чем биологическая мышца. (Обратите внимание, что он не особенно силен по сравнению с другими искусственными мышцами, что в тридцать раз больше мышц тела.
Системы управления
Три типа искусственных мышц имеют различные ограничения, которые влияют на тип системы управления, которую они требуют для приведения в действие. Важно отметить, однако, что системы управления часто предназначены для соответствия спецификациям данного эксперимента, а некоторые эксперименты требуют совместного использования различных исполнительных механизмов или гибридной схемы управления. Таким образом, следующие примеры не должны рассматриваться как исчерпывающий список различных систем управления, которые могут быть использованы для приведения в действие данной искусственной мышцы.
Таким образом, следующие примеры не должны рассматриваться как исчерпывающий список различных систем управления, которые могут быть использованы для приведения в действие данной искусственной мышцы.
Управление напряжением
Скрученные и спиральные полимерные (TCP) мышцы могут быть смоделированы линейными временными состояниями первого порядка при вводе электрического напряжения с точностью более 85%. Таким образом, мышцы TCP легко управляются цифровым ПИД-регулятором. Для ускорения ПИД-регулятора можно использовать нечеткий контроллер.
Контроль EAP
EAP предлагают более низкий вес, более быстрый отклик, более высокую плотность мощности и более тихую работу по сравнению с традиционными приводами. Как электрические, так и ионные EAP в основном управляются с использованием контуров управления обратной связью, более известных как системы управления с замкнутым контуром.
Пневматическое управление
В настоящее время существуют два типа пневматических искусственных мышц (PAM). Первый тип имеет единственный мочевой пузырь, окруженный плетеным рукавом, а второй тип имеет двойной пузырь.
Первый тип имеет единственный мочевой пузырь, окруженный плетеным рукавом, а второй тип имеет двойной пузырь.
Одиночный пузырь, окруженный плетеным рукавом
Пневматические искусственные мышцы, в то же время легкие и недорогие, представляют собой особенно сложную проблему контроля, так как они являются высоконелинейными и обладают свойствами, такими как температура, которые со временем значительно меняются. Пары обычно состоят из резиновых и пластмассовых компонентов. Поскольку эти части вступают в контакт друг с другом во время приведения в действие, температура ПАМ увеличивается, что в конечном итоге приводит к постоянным изменениям структуры искусственной мышцы с течением времени. Эта проблема привела к различным экспериментальным подходам. В заключение (предоставлено Ahn et al.) Жизнеспособные экспериментальные системы управления включают ПИД-контроль, адаптивный контроль (Lilly, 2003), нелинейный оптимальный прогнозный контроль (Reynolds et al., 2003), управление переменной структурой (Reppper et al. , 1998) Medrano-Cerda et al., 1995), планирование получения (Reppperer et al., 1999) и различные подходы к компьютерному компьютеру, включая управление алгоритмом обучения нейронной сети Kohonen (Hesselroth et al., 1994), нейронную сеть / нелинейное ПИД-управление ( Ahn and Thanh, 2005) и нейро-нечеткого / генетического контроля (Chan et al., 2003; Lilly et al., 2003).
, 1998) Medrano-Cerda et al., 1995), планирование получения (Reppperer et al., 1999) и различные подходы к компьютерному компьютеру, включая управление алгоритмом обучения нейронной сети Kohonen (Hesselroth et al., 1994), нейронную сеть / нелинейное ПИД-управление ( Ahn and Thanh, 2005) и нейро-нечеткого / генетического контроля (Chan et al., 2003; Lilly et al., 2003).
Проблемы управления высоко нелинейными системами, как правило, решались методом проб и ошибок, с помощью которых можно было бы дразнить «нечеткие модели» (Chan et al., 2003) поведенческих возможностей системы (из экспериментальных результатов конкретной системы будучи испытанным) опытным специалистом-человеком. Однако в некоторых исследованиях использовались «реальные данные» (Nelles O., 2000) для повышения точности данной нечеткой модели, одновременно избегая математических сложностей предыдущих моделей. Эксперимент Ан и др. — это просто один из примеров недавних экспериментов, в которых используются модифицированные генетические алгоритмы (MGA) для обучения нечетких моделей с использованием экспериментальных данных ввода-вывода от робота-манипулятора PAM.
Двойной пузырь
Этот привод состоит из внешней мембраны с внутренней гибкой мембраной, разделяющей внутреннюю часть мышцы на две части. Сухожилие прикрепляется к мембране и выходит из мышцы через рукав, так что сухожилие может сжиматься в мышце. Трубка позволяет воздуху во внутренний пузырь, который затем катится во внешний пузырь. Ключевым преимуществом пневматической мышцы этого типа является отсутствие потенциально фрикционного движения мочевого пузыря против наружного рукава.
Термический контроль
Искусственные мышцы SMA, в то же время легкие и полезные в приложениях, требующих большой силы и смещения, также представляют особые проблемы контроля; а именно, искусственные мышцы SMA ограничены их гистерезисными отношениями ввода-вывода и ограничениями пропускной способности. Как Wen et al. обсуждать, явление трансформации фазы SMA является «гистерезисным» в том смысле, что результирующая выходная SMA-цепь зависит от истории ее ввода тепла. Что касается ограничений пропускной способности, то динамический отклик привода SMA во время гистерезисных фазовых превращений очень медленный из-за количества времени, необходимого для передачи тепла искусственной мышце SMA. Очень мало исследований было проведено в отношении контроля SMA из-за допущений, которые рассматривают приложения SMA как статические устройства; тем не менее, были проверены различные подходы к управлению для решения проблемы управления гистерезисной нелинейностью.
Очень мало исследований было проведено в отношении контроля SMA из-за допущений, которые рассматривают приложения SMA как статические устройства; тем не менее, были проверены различные подходы к управлению для решения проблемы управления гистерезисной нелинейностью.
Как правило, эта проблема требовала применения либо компенсации разомкнутого контура, либо контроля обратной связи с обратной связью. Что касается управления с разомкнутым контуром, модель Preisach часто использовалась для ее простой структуры и способности к простому моделированию и управлению (Hughes and Wen, 1995). Что касается управления с обратной связью, использовался пассивный подход, анализирующий стабильность SMA с замкнутым контуром (Madill and Wen, 1994). Исследование Wen и др. Дает еще один пример управления обратной связью с обратной связью, демонстрируя стабильность управления с замкнутым контуром в приложениях SMA посредством применения комбинации управления обратной связью по силе и управления положением на гибкой алюминиевой балке, приводимой в действие SMA, выполненной из нитиноловая.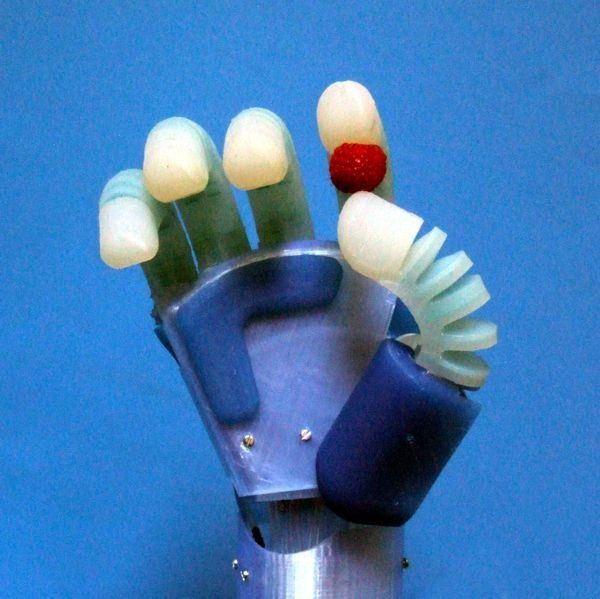
Приложения
Искусственные мышечные технологии имеют широкое применение в биомиметических машинах, включая роботы, промышленные приводы и экзоскелеты с электроприводом. Искусственные мышцы, основанные на EAP, сочетают в себе легкий вес, требования к низкой мощности, упругость и ловкость для передвижения и манипуляции. Будущие устройства EAP будут иметь приложения в аэрокосмической, автомобильной промышленности, медицине, робототехнике, механизмах артикуляции, развлечениях, анимации, игрушках, одежде, тактильных и тактильных интерфейсах, управлении шумом, преобразователях, генераторах электроэнергии и интеллектуальных структурах.
Пневматические искусственные мышцы также обеспечивают большую гибкость, управляемость и легкость по сравнению с обычными пневматическими цилиндрами. Большинство применений PAM связаны с использованием мышц, подобных McKibben. Термоприводы, такие как SMA, имеют различные военные, медицинские, безопасные и роботизированные приложения, а также могут использоваться для генерирования энергии посредством механических изменений формы.
Софт на сельском хозяйстве и искусственные мышцы: главные новости для бизнеса 21 июля
Продолжение сюжета от
Новости СМИ2
Новости
21 июля 2022
Новости
21 июля 2022
Карина Пардаева
Редактор новостного отдела
Продолжение сюжета от 22.07.2022 Philip Morris планирует покинуть Россию, а Mango вернуться: главные новости для бизнеса 22 июля
Карина Пардаева
RB продолжает следить за основными событиями для бизнеса на фоне спецоперации на Украине: ответственность банков за проверку мошеннических операций усилят, спрос на стенды падает, искусственные мышцы для бионических протезов и другие новости 21 июля.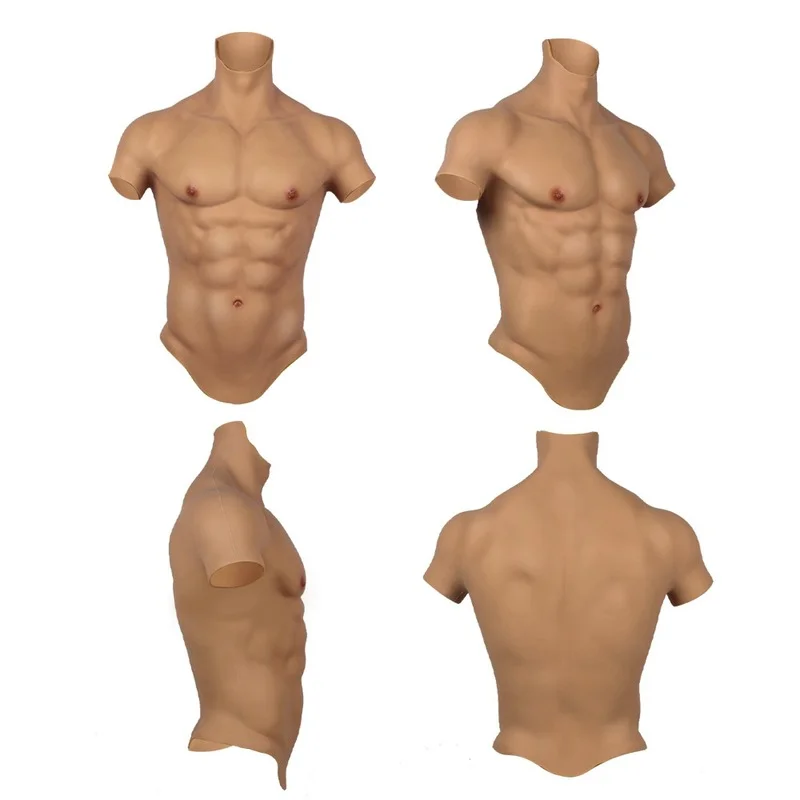
Карина Пардаева
Мир
- Евросоюз утвердил седьмой пакет санкций против России, который пресса иронически называет «шестым с половиной», так как серьезных санкций в запасе у ЕС почти не осталось.
Кроме новых ограничений (частичное эмбарго на золото, включение в черный список 55 физических и юридических лиц и др.) ЕК предложила продлить действие всех санкций против России до конца января 2023 года и добавить пояснения, что санкции не должны препятствовать поставкам продовольствия. - Крупнейший в мире разработчик приложений для бизнеса SAP потеряет 350 млн евро из-за ухода с рынков России и Белоруссии. Это примерно треть годовой операционной прибыли компании.
Россия
- Вице-премьер Мантуров назвал схему параллельного импорта «временным решением» и допустил ее отмену. Это будет происходить по мере появления на российском рынке отечественной продукции на замену импортной.
- В Госдуме разрабатывают новые нормы, усиливающие ответственность банков за операции, связанные с хищением средств у граждан, в том числе путем социальной инженерии.
- Ростуризм планирует расширить программу субсидирования туристических рейсов.

Бизнес
- Российские подразделения иностранных банков Raiffeisen Bank International и Citi возобновили наем сотрудников в стране в июле после того, как российские власти запретили им продавать активы в РФ.
Также новые вакансии опубликовали российские подразделения итальянской группы Intesa Sanpaolo и UniCredit Bank Russia. - «Яндекс», VK, Ozon, МТС, «Вымпелком» и структура НМГ согласились заниматься учетом всей рекламы рунета.
Система тотального учета интернет-рекламы должна заработать в России осенью. Заказчики, работающие с ними агентства и сами интернет-площадки должны будут передавать в Роскомнадзор информацию обо всех кампаниях. - Крупным российским сельскохозяйственным компаниям предложили профинансировать 20% стоимости импортозамещения необходимого им производственного софта.
- Роструд предостерег уходящую из России IKEA от нарушения прав работников.
- В Москве за первое полугодие на 19% выросло количество складов индивидуального хранения, а доля арендаторов-физлиц достигла рекордного с 2014 года уровня.
- В России может возникнуть вторичный дефицит медтехники, так как ее поставщики не могут вывезти запчасти на ремонт или для замены в дальнее зарубежье. Производители просят правительство разрешить вывоз за границу деталей иностранного оборудования, чтобы не допустить его дефицита в больницах.
- Спрос на стенды, стойки, рекламную продукцию и бронированное оборудование, которое используют для продвижения товаров в магазинах, упал на 80% по сравнению с 2020 годом.
Транспорт
- В качестве основы для электромобилей «Москвич» рассматривается разработка стартапа «Кама». Источники «Ведомостей» сказали, что уже с 2024 года.
Технологии
- Искусственные мышцы, которые можно будет использовать при создании человекоподобных роботов и в бионических протезах, разрабатывают в Сеченовском университете.

Фото на обложке: Gorodenkoff / Shutterstock
Подписывайтесь на наш Telegram-канал, чтобы быть в курсе последних новостей и событий!
- Бизнес после признания ДНР и ЛНР
- Экономика
- Финансы
- Россия
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Материалы по теме
1
Samsung взяла на работу специалистов из Electrolux, «Теремок» запускает доставку: главное за 3 октября
2
Семь признаков бизнеса, которому пока рано расти: кейсы и решения
3
4 важных параметра, чтобы выбрать подходящую систему налогообложения
4
Как открыть филиал компании в Испании: опыт маркетингового агентства
5
Выбор региона, регистрация компании и открытие счета — как предприниматель перевозил бизнес в Дубай
ВОЗМОЖНОСТИ
03 октября 2022
IT_ONE DevOps CHAMPION
03 октября 2022
Математическая олимпиада для школьников «Яндекс Учебник»
03 октября 2022
«УМНИК-Уралхим»
Все ВОЗМОЖНОСТИ
Новости
Конец моратория на банкротство, новые законы и просьба бизнеса об отсрочке: главное 1 октября
Новости
Компания DNS сообщила об утечке личных данных сотрудников и клиентов
Истории
Этот вопрос задают на каждом собеседовании — и вот как на него стоит отвечать
Колонки
В Мексику с семьей: как продакт-менеджер открывал офис в Южной Нижней Калифорнии
Колонки
Как распознать перспективного «джуна» и не потерять время и деньги?
искусственных «мышц» развивают мощную тяговую силу | Новости Массачусетского технологического института
По мере того, как растение огурца растет, оно прорастает туго закрученными усами, которые ищут опоры, чтобы тянуть растение вверх. Это гарантирует, что растение получит как можно больше солнечного света. Теперь исследователи из Массачусетского технологического института нашли способ имитировать этот механизм скручивания и натяжения для производства сокращающихся волокон, которые можно использовать в качестве искусственных мышц для роботов, протезов конечностей или других механических и биомедицинских приложений.
Это гарантирует, что растение получит как можно больше солнечного света. Теперь исследователи из Массачусетского технологического института нашли способ имитировать этот механизм скручивания и натяжения для производства сокращающихся волокон, которые можно использовать в качестве искусственных мышц для роботов, протезов конечностей или других механических и биомедицинских приложений.
Хотя для создания искусственных мышц использовалось множество различных подходов, включая гидравлические системы, серводвигатели, металлы с памятью формы и полимеры, реагирующие на стимулы, все они имеют ограничения, включая большой вес или медленное время отклика. Исследователи говорят, что новая система на основе волокна, напротив, чрезвычайно легкая и может реагировать очень быстро. О результатах сообщается сегодня в журнале Science .
Новые волокна были разработаны постдоком Массачусетского технологического института Мехметом Каником и аспирантом Массачусетского технологического института Сирмой Оргюч в сотрудничестве с профессорами Полиной Аникеевой, Йоэлем Финком, Анантой Чандракасан и К. Джемом Ташаном, а также пятью другими, с использованием техники вытягивания волокон для объединения двух разнородных полимеров в единую нить волокна.
Джемом Ташаном, а также пятью другими, с использованием техники вытягивания волокон для объединения двух разнородных полимеров в единую нить волокна.
Ключом к процессу является соединение двух материалов с очень разными коэффициентами теплового расширения, то есть они имеют разную скорость расширения при нагревании. Тот же принцип используется во многих термостатах, например, с использованием биметаллической пластины для измерения температуры. По мере того, как соединяемый материал нагревается, сторона, которая хочет расширяться быстрее, удерживается другим материалом. В результате склеенный материал скручивается, изгибаясь в сторону, которая расширяется медленнее.
Авторы и права: Предоставлено исследователями его первоначальная длина естественным образом образует тугую спираль, очень похожую на усики, которые производят огурцы. Но то, что произошло дальше, на самом деле стало неожиданностью, когда исследователи впервые столкнулись с этим. «В этом было много случайности, — вспоминает Аникеева.
Как только Каник впервые поднял свернутое волокно, только от тепла его руки волокно свернулось еще плотнее. Следуя этому наблюдению, он обнаружил, что даже небольшое повышение температуры может привести к тому, что катушка сожмется, создавая удивительно сильное тяговое усилие. Затем, как только температура снижалась, волокно возвращалось к своей первоначальной длине. В ходе более поздних испытаний команда показала, что этот процесс сжатия и расширения можно повторить 10 000 раз, «и он все еще работает», — говорит Аникеева.
Предоставлено исследователями
Одной из причин такого долголетия, по ее словам, является то, что «все работает в очень умеренных условиях», включая низкие температуры активации. Всего на 1 градус Цельсия может быть достаточно, чтобы начать сокращение волокон.
Волокна могут иметь широкий диапазон размеров, от нескольких микрометров (миллионных долей метра) до нескольких миллиметров (тысячных долей метра) в ширину, и их можно легко производить партиями длиной до сотен метров.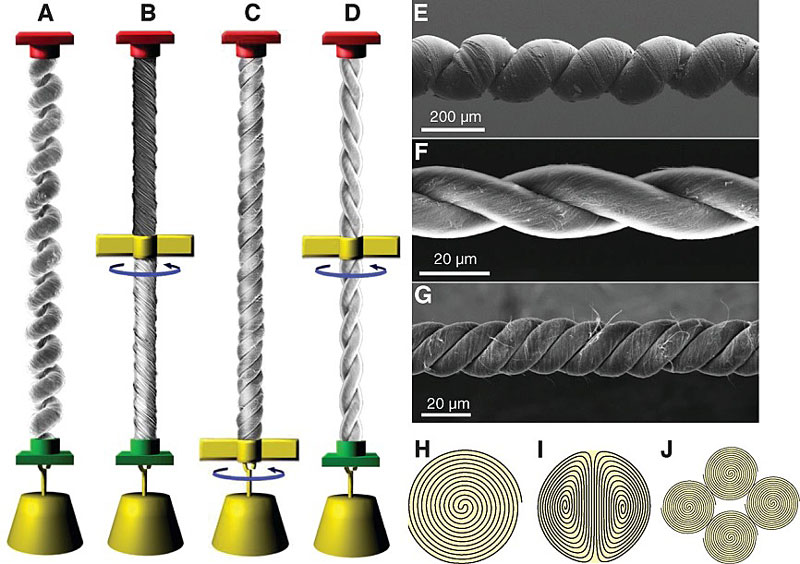 Испытания показали, что одно волокно способно поднимать грузы, в 650 раз превышающие его собственный вес. Для этих экспериментов с отдельными волокнами Оргюч и Каник разработали специальные миниатюрные испытательные установки.
Испытания показали, что одно волокно способно поднимать грузы, в 650 раз превышающие его собственный вес. Для этих экспериментов с отдельными волокнами Оргюч и Каник разработали специальные миниатюрные испытательные установки.
Предоставлено исследователями
Степень натяжения, возникающая при нагревании волокна, может быть «запрограммирована», путем определения степени первоначального растяжения волокна. Это позволяет точно настроить материал на величину необходимой силы и величину изменения температуры, необходимую для запуска этой силы.
Волокна изготавливаются с использованием системы вытягивания волокон, что позволяет включать в само волокно другие компоненты. Вытягивание волокна осуществляется путем создания увеличенной версии материала, называемой заготовкой, которую затем нагревают до определенной температуры, при которой материал становится вязким. Затем его можно вытягивать, как вытягивание ириски, чтобы создать волокно, которое сохраняет свою внутреннюю структуру, но составляет небольшую часть ширины преформы.
В целях тестирования исследователи покрыли волокна сеткой из проводящих нанопроволок. Эти сетки можно использовать в качестве датчиков для точного определения натяжения волокна. В будущем эти волокна могут также включать в себя нагревательные элементы, такие как оптические волокна или электроды, обеспечивающие способ внутреннего нагрева без необходимости полагаться на какой-либо внешний источник тепла для активации сокращения «мышцы».
Такие волокна могут найти применение в качестве приводов в роботизированных руках, ногах или захватах, а также в протезах конечностей, где их малый вес и малое время отклика могут обеспечить значительное преимущество.
Некоторые современные протезы могут весить до 30 фунтов, при этом большая часть веса приходится на приводы, которые часто бывают пневматическими или гидравлическими; Таким образом, более легкие приводы могут значительно облегчить жизнь тем, кто пользуется протезами. Такие волокна также могут найти применение в крошечных биомедицинских устройствах, таких как медицинский робот, который работает, проникая в артерию и затем активируясь», — предполагает Аникеева. «У нас есть время активации порядка десятков миллисекунд до секунд», — говорит она, в зависимости от размеров.
«У нас есть время активации порядка десятков миллисекунд до секунд», — говорит она, в зависимости от размеров.
Чтобы обеспечить большую силу для подъема более тяжелых грузов, волокна можно связать вместе, подобно тому, как мышечные волокна связаны в теле. Команда успешно протестировала пучки из 100 волокон. В процессе вытягивания волокна датчики также могут быть встроены в волокна для обеспечения обратной связи об условиях, с которыми они сталкиваются, например, в протезе конечности. Оргюч говорит, что связанные мышечные волокна с замкнутым механизмом обратной связи могут найти применение в роботизированных системах, где требуется автоматизированный и точный контроль.
Каник говорит, что возможности для материалов этого типа практически безграничны, потому что почти любая комбинация двух материалов с разной степенью теплового расширения может работать, оставляя обширную область возможных комбинаций для исследования. Он добавляет, что это новое открытие было похоже на открытие нового окна только для того, чтобы увидеть «кучу других окон», ожидающих открытия.
«Сила этой работы в ее простоте, — говорит он.
В команду также входили аспирант Массачусетского технологического института Георгиос Варнавидес, постдокторант Джинву Ким и студенты бакалавриата Томас Бенавидес, Дани Гонсалес и Тимоти Акинтлио. Работа была поддержана Национальным институтом неврологических расстройств и инсульта и Национальным научным фондом.
Поделитесь этой новостной статьей:
Упоминания в прессе
Scientific American
Исследователи Массачусетского технологического института разработали искусственные мышцы, которые могут растягиваться более чем на 1000 процентов от своего размера и поднимать в 650 раз больше своего веса, сообщает Сид Перкинс для Scientific American . Новые волокна могут найти применение в робототехнике и протезах, объясняет Перкинс, и «работают больше как настоящие мышцы: они тянут или поднимают предметы».
Полная статья через Scientific American →
Ссылки по теме
- Видео: Программируемая деформация искусственной мышцы на основе волокон
- Статья: «Программируемая деформация искусственной мышцы на основе волокон»
- Полина Аникеева
- Yoel Fink 90 Чандракасан
- Джем Ташан
- Научно-исследовательская лаборатория электроники
- Институт исследований мозга Макговерна
- Департамент материаловедения и инженерии
- Кафедра мозга и когнитивных наук
- Кафедра машиностроения
- Инженерная школа
Сравнительный обзор искусственных мышц для микросистемных приложений
Скачать PDF
- Обзор статьи
- Открытый доступ
- Опубликовано:
- Маюэ Ши
ORCID: orcid.org/0000-0001-8539-6873 1 и - Эрик М. Йейтман
ORCID: orcid.org/0000-0003-0487-2693 1
Микросистемы и наноинженерия
том 7 , Номер статьи: 95 (2021)
Процитировать эту статью
4858 доступов
3 Цитаты
3 Альтметрика
Сведения о показателях
Предметы
- Инженерное дело
- Материаловедение
Abstract
Искусственные мышцы способны генерировать возбуждение в микросистемах с исключительной податливостью.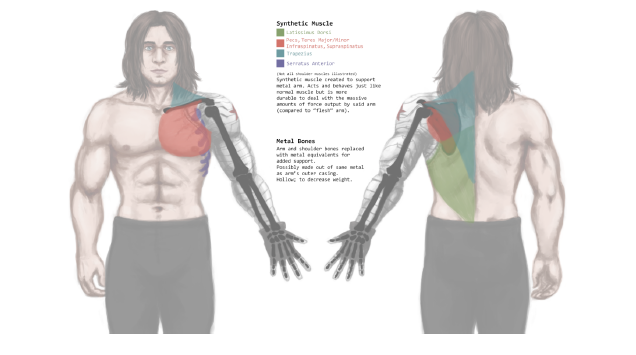 В последние годы наблюдается растущий академический интерес к искусственным мышцам и их применению во многих областях, таких как мягкая робототехника и биомедицинские устройства. Целью этой статьи является сравнительный обзор последних достижений в области искусственных мышц, основанных на различных операционных механизмах. Анализируются и сравниваются преимущества и ограничения каждого рабочего механизма. В соответствии с уникальными требованиями к применению, а также электрическими и механическими свойствами типов мышц мы предлагаем подходящие механизмы искусственных мышц для конкретных приложений микросистем. Наконец, мы обсудим потенциальные стратегии доставки, преобразования и хранения энергии для обеспечения энергетической автономности систем микророботов на системном уровне.
В последние годы наблюдается растущий академический интерес к искусственным мышцам и их применению во многих областях, таких как мягкая робототехника и биомедицинские устройства. Целью этой статьи является сравнительный обзор последних достижений в области искусственных мышц, основанных на различных операционных механизмах. Анализируются и сравниваются преимущества и ограничения каждого рабочего механизма. В соответствии с уникальными требованиями к применению, а также электрическими и механическими свойствами типов мышц мы предлагаем подходящие механизмы искусственных мышц для конкретных приложений микросистем. Наконец, мы обсудим потенциальные стратегии доставки, преобразования и хранения энергии для обеспечения энергетической автономности систем микророботов на системном уровне.
Введение
В связи с миниатюризацией электроники и развитием искусственного интеллекта в последние несколько десятилетий различные усовершенствованные электронные устройства все чаще используются в самых разных условиях жизни. Для частого и тесного взаимодействия человека с машиной требуются мягкие, малогабаритные, легкие и энергоэффективные устройства. Приводы, как важная часть многих электронных устройств, также требуют этих свойств. Однако традиционные жесткие приводы, такие как электродвигатели и двигатели внутреннего сгорания, не только имеют проблемы с безопасностью, но также имеют низкую общую эффективность и высокую стоимость 9.0112 1 в субсантиметровой шкале из-за несоответствия механического импеданса, значительных потерь на трение и сложности изготовления.
Для частого и тесного взаимодействия человека с машиной требуются мягкие, малогабаритные, легкие и энергоэффективные устройства. Приводы, как важная часть многих электронных устройств, также требуют этих свойств. Однако традиционные жесткие приводы, такие как электродвигатели и двигатели внутреннего сгорания, не только имеют проблемы с безопасностью, но также имеют низкую общую эффективность и высокую стоимость 9.0112 1 в субсантиметровой шкале из-за несоответствия механического импеданса, значительных потерь на трение и сложности изготовления.
Натуральная мышца — это мягкий биологический привод с выдающимися способностями к управлению, податливости и дополнительными функциями, такими как самовосстановление. В частности, скелетные мышцы состоят из мышечных волокон, расположенных параллельно между сухожилиями, а мышечные волокна состоят из миофибрилл. Миофибрилла содержит миозиновые филаменты и актиновые филаменты. Миофибрилла сокращается, когда актиновые филаменты скользят вдоль миозиновых филаментов, возбуждаемых гидролизом АТФ (аденозинтрифосфата). Этот процесс находится под контролем нейронов посредством высвобождения Ca 9.0112 2+ . Процесс релаксации происходит за счет прекращения взаимодействия между актином и миозином при снижении концентрации Са 2+ . Наконец, движение передается костям через сухожилия на концах скелетных мышц. Подробная структура и молекулярная основа скелетных мышц были тщательно изучены, как показано в существующей литературе 2 .
Этот процесс находится под контролем нейронов посредством высвобождения Ca 9.0112 2+ . Процесс релаксации происходит за счет прекращения взаимодействия между актином и миозином при снижении концентрации Са 2+ . Наконец, движение передается костям через сухожилия на концах скелетных мышц. Подробная структура и молекулярная основа скелетных мышц были тщательно изучены, как показано в существующей литературе 2 .
Превосходная работа естественных мышц вдохновляет исследователей на реализацию таких привлекательных функций с помощью инженерных материалов и методов. Искусственные мышцы — это категория быстро развивающихся исполнительных механизмов, которые могут имитировать свойства и функции естественных мышц и подходят для согласованных взаимодействий. Г.М. Уайтсайдс определил актуатор как устройство, которое передает механическую энергию другому устройству 9.0112 3 . Исходя из этого определения, искусственная мышца явно является исполнительным механизмом; однако он имеет несколько важных отличий от обычных приводов, таких как электродвигатели и пневматические поршни, которые широко используются в промышленности. С.М. Мирвакили и И. В. Хантер определили, что искусственные мышцы представляют собой класс чувствительных материалов и устройств, которые могут обратимо генерировать возбуждение, включая сокращение, расширение или вращение внутри одного компонента 4 . С нашей точки зрения, искусственная мышца имеет три характерные особенности: небольшой размер, низкую жесткость и способность воспроизводить центральную функцию естественной мышцы, т. е. генерировать срабатывание внутри отдельного небольшого устройства в ответ на внешний раздражитель. Этот стимул может принимать различные формы 4 , включая электрический сигнал 5 , давление 3 , температуру 6 , магнитное поле 7,8 и т. д.
С.М. Мирвакили и И. В. Хантер определили, что искусственные мышцы представляют собой класс чувствительных материалов и устройств, которые могут обратимо генерировать возбуждение, включая сокращение, расширение или вращение внутри одного компонента 4 . С нашей точки зрения, искусственная мышца имеет три характерные особенности: небольшой размер, низкую жесткость и способность воспроизводить центральную функцию естественной мышцы, т. е. генерировать срабатывание внутри отдельного небольшого устройства в ответ на внешний раздражитель. Этот стимул может принимать различные формы 4 , включая электрический сигнал 5 , давление 3 , температуру 6 , магнитное поле 7,8 и т. д.
Искусственные мышцы особенно подходят для взаимодействия человека с машиной из-за их мягкости и прочные механические свойства, гибкие приводные механизмы, низкая сложность изготовления и приемлемая эффективность в миниатюрном (субсантиметровом) масштабе. В последние годы искусственные мышцы быстро развивались, частично благодаря новым и улучшенным материалам, производственным процессам и конструкциям устройств. Появляется все больше литературы об искусственных мышцах, основанных на различных исполнительных механизмах, таких как небольшие пневматические/гидравлические искусственные мышцы 3,8 , диэлектрические эластомерные (DE) искусственные мышцы 9 , ионно-полимерные приводы 10 , микропьезоэлектрические приводы 11 , магнитные приводы 7 , и приводы на основе сплавов с памятью формы и полимеров (SMAs) ) 12 . В последние годы опубликован ряд отличных обзоров различных искусственных мышц. Например, Мирвакили и др. 4 рассмотрены различные приводные механизмы для искусственных мышц и их механические свойства. Хайнс и др. 13 обобщил и обсудил множество мягких приводов, классифицированных по различным стимулам движения.
В последние годы искусственные мышцы быстро развивались, частично благодаря новым и улучшенным материалам, производственным процессам и конструкциям устройств. Появляется все больше литературы об искусственных мышцах, основанных на различных исполнительных механизмах, таких как небольшие пневматические/гидравлические искусственные мышцы 3,8 , диэлектрические эластомерные (DE) искусственные мышцы 9 , ионно-полимерные приводы 10 , микропьезоэлектрические приводы 11 , магнитные приводы 7 , и приводы на основе сплавов с памятью формы и полимеров (SMAs) ) 12 . В последние годы опубликован ряд отличных обзоров различных искусственных мышц. Например, Мирвакили и др. 4 рассмотрены различные приводные механизмы для искусственных мышц и их механические свойства. Хайнс и др. 13 обобщил и обсудил множество мягких приводов, классифицированных по различным стимулам движения.
Это исследование направлено на предоставление сравнительного обзора с практическими мнениями о применении и разработке искусственных мышц в микросистемах на основе предыдущих обзоров и некоторых критических разработок в последнее время. В частности, первой целью этой статьи является обзор недавних исследований искусственных мышц. Мы предоставляем обзор искусственных мышц на основе шести важных принципов срабатывания, как показано на рис. 1, и уделяем особое внимание прогрессу за последние пять лет. Во-вторых, в этом обзоре мы обобщаем свойства различных исполнительных механизмов и подчеркиваем систематический сравнительный анализ электрических и механических свойств. Выделены важные для потенциальных приложений параметры, такие как модуль, максимальный ход, время отклика и энергоэффективность. Анализируются и сравниваются плюсы и минусы разных видов искусственных мышц. В соответствии с этими анализами мы предлагаем подходящие типы искусственных мышц для конкретных приложений на основе их уникальных электрических и механических свойств. Наконец, чтобы реализовать высокоэффективное управление энергопотреблением, мы обсудим некоторые методы, связанные с доставкой, хранением и преобразованием энергии. Это особенно полезно для достижения энергетической автономии в системах микророботов.
В частности, первой целью этой статьи является обзор недавних исследований искусственных мышц. Мы предоставляем обзор искусственных мышц на основе шести важных принципов срабатывания, как показано на рис. 1, и уделяем особое внимание прогрессу за последние пять лет. Во-вторых, в этом обзоре мы обобщаем свойства различных исполнительных механизмов и подчеркиваем систематический сравнительный анализ электрических и механических свойств. Выделены важные для потенциальных приложений параметры, такие как модуль, максимальный ход, время отклика и энергоэффективность. Анализируются и сравниваются плюсы и минусы разных видов искусственных мышц. В соответствии с этими анализами мы предлагаем подходящие типы искусственных мышц для конкретных приложений на основе их уникальных электрических и механических свойств. Наконец, чтобы реализовать высокоэффективное управление энергопотреблением, мы обсудим некоторые методы, связанные с доставкой, хранением и преобразованием энергии. Это особенно полезно для достижения энергетической автономии в системах микророботов.
Рис. 1: Искусственные мышцы для микросистемных приложений.
Искусственные мышцы реагируют на различные раздражители окружающей среды. Они могут генерировать срабатывание с высокой податливостью для различных микросистемных приложений
Изображение с полным размером
Искусственные мышцы с различными приводными механизмами
В последние годы было исследовано множество стимулов и механизмов, приводящих в действие искусственные мышцы. По разным раздражителям искусственные мышцы можно отнести к термореактивным 6,14 , электрически чувствительные 15,16,17 , магниточувствительные 7,18,19 , светочувствительные 20 , химически реагирующие 21 и управляемые давлением 22,23 . Более того, некоторые искусственные мышцы реагируют на множественные стимулы 24 . Мультиреактивный механизм эффективно увеличивает гибкость и приспособляемость искусственной мышцы, но требует комплексного управления устройством и окружающей средой. По конкретным исполнительным механизмам искусственные мышцы можно классифицировать на СМА и СМП, ДЭ, ионно-полимерно-металлокомпозитные (ИПМК), пневматические, гидравлические приводы и т. д. Этот метод классификации является предпочтительным в нашем обзоре, поскольку он подчеркивает физическую сущность применительно к генерируют срабатывание и, таким образом, могут дать четкое руководство по техническому совершенствованию. В этом разделе мы стремимся обобщить свойства и недавний прогресс в шести распространенных исполнительных механизмах.
По конкретным исполнительным механизмам искусственные мышцы можно классифицировать на СМА и СМП, ДЭ, ионно-полимерно-металлокомпозитные (ИПМК), пневматические, гидравлические приводы и т. д. Этот метод классификации является предпочтительным в нашем обзоре, поскольку он подчеркивает физическую сущность применительно к генерируют срабатывание и, таким образом, могут дать четкое руководство по техническому совершенствованию. В этом разделе мы стремимся обобщить свойства и недавний прогресс в шести распространенных исполнительных механизмах.
SMA и SMP
Эффект памяти формы описывает явление, при котором материал может деформироваться и фиксироваться во временную форму, после чего восстановление исходной формы может быть реализовано внешним стимулом 25 . Существуют односторонние и обратимые (двусторонние) эффекты памяти формы; некоторые материалы с памятью формы даже обладают свойствами памяти нескольких форм 26 . Односторонний эффект памяти формы позволяет односторонне восстанавливать временную форму, а обратимый эффект позволяет материалу деформироваться между двумя формами. Эффект памяти формы был обнаружен в некоторых сплавах 27,28 , керамика 29,30 и полимеры 25,31,32 . Среди них SMA активно изучались с момента их первого открытия в 1932 году 33 . В. Бюлер и Ф. Ван открыли и разработали знаменитый СПФ на основе NiTi (нитинол) в 1962 г. В настоящее время СПФ на основе NiTi по-прежнему являются наиболее предпочтительными в применении по сравнению с другими СПФ, такими как на основе железа и меди. SMA 34 . Хотя СПФ на основе железа и меди являются недорогими и коммерчески доступными, их низкая стабильность и термомеханические характеристики часто ограничивают их дальнейшее применение 4,27 .
Эффект памяти формы был обнаружен в некоторых сплавах 27,28 , керамика 29,30 и полимеры 25,31,32 . Среди них SMA активно изучались с момента их первого открытия в 1932 году 33 . В. Бюлер и Ф. Ван открыли и разработали знаменитый СПФ на основе NiTi (нитинол) в 1962 г. В настоящее время СПФ на основе NiTi по-прежнему являются наиболее предпочтительными в применении по сравнению с другими СПФ, такими как на основе железа и меди. SMA 34 . Хотя СПФ на основе железа и меди являются недорогими и коммерчески доступными, их низкая стабильность и термомеханические характеристики часто ограничивают их дальнейшее применение 4,27 .
Эффект памяти формы в сплавах возникает из-за обратимого фазового перехода при изменении температуры. В процессе фазового перехода СПФ имеет три различные кристаллические структуры: двойникованный мартенсит, раздвоенный мартенсит и аустенит 27,35 . Типичный односторонний процесс памяти формы может начаться с двойникового мартенсита при низких температурах. При механическом нагружении двойникованный мартенсит превращается в раздвойникованный мартенсит с деформацией (деформированная мартенситная фаза). Затем при нагреве деформированного СПФ до температуры выше температуры начала аустенита ( A s ), он постепенно восстанавливает свою первоначальную форму и превращается в аустенит. На этом этапе проводящие SMA можно легко привести в действие с помощью джоулева тепла. Наконец, после процесса охлаждения аустенит возвращается в двойниковую мартенситную фазу с исходной формой.
При механическом нагружении двойникованный мартенсит превращается в раздвойникованный мартенсит с деформацией (деформированная мартенситная фаза). Затем при нагреве деформированного СПФ до температуры выше температуры начала аустенита ( A s ), он постепенно восстанавливает свою первоначальную форму и превращается в аустенит. На этом этапе проводящие SMA можно легко привести в действие с помощью джоулева тепла. Наконец, после процесса охлаждения аустенит возвращается в двойниковую мартенситную фазу с исходной формой.
Наиболее существенным ограничением для СПФ является их низкая рабочая частота, что обусловлено низкой скоростью теплопередачи, особенно на стадии охлаждения. Было изучено несколько стратегий повышения теплопередачи. Например, уменьшение диаметра волокон SMA оказалось выгодным из-за увеличения удельной поверхности 36 . Интересно, что это говорит о том, что микроактуатор на основе SMA может работать на более высокой рабочей частоте, чем мезомасштабные устройства. Кроме того, была изучена тепловая конвекция для увеличения скорости отклика. Ан и др. предоставил краткое изложение соответствующих методов в исх. 27 .
Кроме того, была изучена тепловая конвекция для увеличения скорости отклика. Ан и др. предоставил краткое изложение соответствующих методов в исх. 27 .
В последние годы все большее внимание привлекает мягкая природа SMP. SMP особенно перспективны в качестве искусственных мышц, потому что они демонстрируют свойства, сходные с реальными мышцами в нескольких аспектах, а именно: низкую плотность массы, низкий модуль упругости и высокую скорость восстановления формы. Кроме того, СМП, такие как полимолочная кислота и поликапролактон, являются биосовместимыми и биоразлагаемыми, что делает их особенно подходящими для биомедицинских применений. Время восстановления часто находится на уровне 1–100 с, а типичная развиваемая сила колеблется от 1 до 100 МПа.
Односторонний СМП может быть сначала деформирован при повышенной температуре деформации ( T d ), после чего деформированная форма может быть закреплена с фиксацией формы ( R f ) при охлаждении . Эта временная деформация будет снята с восстановлением формы ( R r ) путем нагревания материала до температуры восстановления ( T r ) 26 . Для обратимого SMP процесс программирования аналогичен. В исх. 25 , Лендлейн и Гулд представили подробное обсуждение макромасштабных и молекулярных механизмов SMP. Вкратце, сегменты цепи в полимере химически и физически сшиты через точки соединения. Эти точки сети контролируют постоянную форму на макроуровне. Временная форма определяется дополнительными обратимыми точками сети, которые образуются в процессе программирования. Эти факторы ограничивают восстановление ориентированных сегментов цепи после программирования, тем самым фиксируя временную форму. Если существует более одной температуры фазового перехода для разных доменов, то SMP будет иметь множественные эффекты памяти формы 37,38 . Обратимый эффект памяти формы имеет решающее значение для мягких приводов, но большинство обычных SMP представляют собой материалы с односторонней памятью формы.
Эта временная деформация будет снята с восстановлением формы ( R r ) путем нагревания материала до температуры восстановления ( T r ) 26 . Для обратимого SMP процесс программирования аналогичен. В исх. 25 , Лендлейн и Гулд представили подробное обсуждение макромасштабных и молекулярных механизмов SMP. Вкратце, сегменты цепи в полимере химически и физически сшиты через точки соединения. Эти точки сети контролируют постоянную форму на макроуровне. Временная форма определяется дополнительными обратимыми точками сети, которые образуются в процессе программирования. Эти факторы ограничивают восстановление ориентированных сегментов цепи после программирования, тем самым фиксируя временную форму. Если существует более одной температуры фазового перехода для разных доменов, то SMP будет иметь множественные эффекты памяти формы 37,38 . Обратимый эффект памяти формы имеет решающее значение для мягких приводов, но большинство обычных SMP представляют собой материалы с односторонней памятью формы. Первый реверсивный двунаправленный привод SMP был разработан Behl et al. 39,40 . В отличие от одностороннего СМЧ, имеющего «замороженное» состояние при низкой температуре, в обратимом СМЧ в процессе охлаждения происходит деформация в направлении ориентации за счет кристаллизационного удлинения ориентированных сегментов, связанных с нижней температура плавления 40 .
Первый реверсивный двунаправленный привод SMP был разработан Behl et al. 39,40 . В отличие от одностороннего СМЧ, имеющего «замороженное» состояние при низкой температуре, в обратимом СМЧ в процессе охлаждения происходит деформация в направлении ориентации за счет кристаллизационного удлинения ориентированных сегментов, связанных с нижней температура плавления 40 .
Искусственные мышцы с памятью формы использовались для различных целей 41,42 . Ким и др. использовал пружину NiTi в качестве мышцы мягкого робота, похожего на дождевого червя 43 . Пружинная конструкция была изготовлена путем намотки никель-титанового волокна (100 мкм) на проволоку с сердечником (200 мкм). Мышечные волокна пружинной формы расположены в двух направлениях, имитируя продольную мышцу и окружную мышцу дождевого червя. В другом эксперименте робот продемонстрировал сокращение на 50% и плотность энергии 1226 Дж/кг. Ли и др. разработали микроразмерные никель-титановые приводы с ромбовидной структурой каркаса, изготовленной методом фрезерования сфокусированным ионным пучком (ФИП) 44 (рис. 2а). При лазерном нагреве эти приводы продемонстрировали максимальную деформацию 60%, что было намного выше, чем у обычного объемного сплава NiTi (деформация < 8% 27 ). Примечательно, что эти приводы способны работать на высоких частотах. Из-за чрезвычайно малого объема их устройство имело низкую теплоемкость и большую удельную поверхность, что приводило к очень быстрому термомеханическому отклику до 1,6 кГц.
2а). При лазерном нагреве эти приводы продемонстрировали максимальную деформацию 60%, что было намного выше, чем у обычного объемного сплава NiTi (деформация < 8% 27 ). Примечательно, что эти приводы способны работать на высоких частотах. Из-за чрезвычайно малого объема их устройство имело низкую теплоемкость и большую удельную поверхность, что приводило к очень быстрому термомеханическому отклику до 1,6 кГц.
Рис. 2: Микроисполнительные конструкции и устройства на основе SMA и SMP.
a Микроактуатор SMA с ромбовидными каркасными структурами (толщиной 1 мкм) в испытании на лазерное облучение 44 . Авторские права принадлежат Wiley, 2018 г. Перепечатано с разрешения. b Схематическая диаграмма скручивающих электродов с использованием СМП для стимуляции блуждающего нерва и записи ЭКГ (слева) и фотографии имплантированного скручивающего электрода (внутренний диаметр 1 мм) на блуждающий нерв (справа) 49 . Воспроизведено из исх. 49 (2019, CC BY 4.0). с 4D-печать SMP с переменным модулем 52 . Авторское право 2019 от ACS. Перепечатано с разрешения. d Программирование искусственного крана с помощью термо- и фотореверсивного СМП 50 . Воспроизведено из исх. 50 (2018, CC BY 4.0). e SMP-переключатель, напечатанный на 3D-принтере, с серебряными проводящими чернилами 51 . Авторские права принадлежат Wiley, 2016 г. Перепечатано с разрешения
Воспроизведено из исх. 49 (2019, CC BY 4.0). с 4D-печать SMP с переменным модулем 52 . Авторское право 2019 от ACS. Перепечатано с разрешения. d Программирование искусственного крана с помощью термо- и фотореверсивного СМП 50 . Воспроизведено из исх. 50 (2018, CC BY 4.0). e SMP-переключатель, напечатанный на 3D-принтере, с серебряными проводящими чернилами 51 . Авторские права принадлежат Wiley, 2016 г. Перепечатано с разрешения
Полноразмерное изображение
Из-за прозрачности некоторых SMP в последние годы они изучались как оптические компоненты. Например, группа легких клапанов SMP была разработана Xu et al. 45 . Микроструктурированный SMP был сформирован одноэтапным компрессионным формованием в полидиметилсилоксановой (PDMS) форме, а затем сжат в плоской форме при температуре ~100 °C для формирования временной плоской формы с коэффициентом пропускания ~50%. При нагреве массивом оксида индия-олова джоулевой теплотой на прозрачной подложке микроструктура может быть выборочно восстановлена, а коэффициент пропускания после восстановления снижается до менее 0,8%.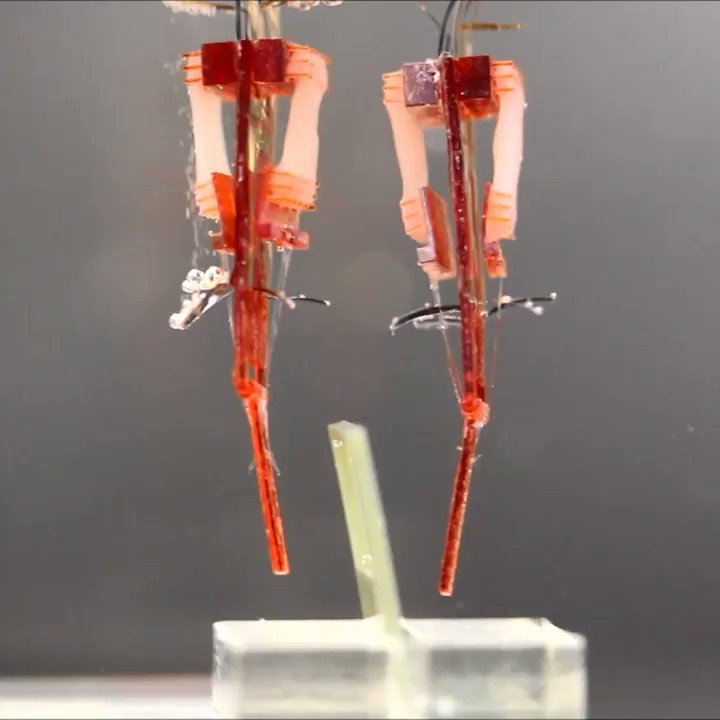 В другом исследовании, недавно опубликованном Zhang et al. показывает, что SMP с субмикронными структурами имели больше возможностей для отображения изображений с цветами 46 .
В другом исследовании, недавно опубликованном Zhang et al. показывает, что SMP с субмикронными структурами имели больше возможностей для отображения изображений с цветами 46 .
SMP также могут применяться для реализации контролируемой деформации конструкций. Сложная геометрия и замковые узлы с последовательным складыванием реализованы с использованием SMP 47,48 . На рис. 2b представлено биомедицинское применение контролируемой деформации 49 . SMP использовали для формирования скрученного электрода для стимуляции блуждающего нерва и записи ЭКГ. На рис. 2г представлен процесс программирования и работы искусственного крана 9.0112 50 с SMP, который программируется термо- и фотообратимыми соединениями. Крылья демонстрировали обратимое срабатывание при изменении температуры от 0 до 80 °C. 3D-печать была гибким методом изготовления приводов SMP. На рисунке 2e представлен SMP-переключатель, напечатанный на 3D-принтере с серебряными проводящими чернилами 51 . Этот привод может переключаться между состояниями включения и выключения при различных температурах. На рис. 2в представлены 4D-печатные SMP (есть дополнительное измерение времени) с разными модулями и подвешенным весом 500 г при 80 °C 52 . За счет управления временем воздействия цифрового света за один тираж привод SMP имеет различные механические свойства в разных частях, что обеспечивает сложное поведение срабатывания.
Этот привод может переключаться между состояниями включения и выключения при различных температурах. На рис. 2в представлены 4D-печатные SMP (есть дополнительное измерение времени) с разными модулями и подвешенным весом 500 г при 80 °C 52 . За счет управления временем воздействия цифрового света за один тираж привод SMP имеет различные механические свойства в разных частях, что обеспечивает сложное поведение срабатывания.
Кроме того, достигнут значительный прогресс в исследованиях материалов. В 2010 году Се обнаружил настраиваемый эффект памяти формы в ленте из иономера перфторсульфоновой кислоты (PFSA) 26 . После этого Луо и соавт. разработаны полимерные композиты тройной формы 38 . Зе и др. сообщили, что магнитный СМП содержит магнитные частицы Fe 3 O 4 и NdFeB 53 . Частицы Fe 3 O 4 использовались для блокировки и разблокировки формы посредством индукционного нагрева в магнитном поле переменного тока (AC). Частицы NdFeB обеспечивают программируемую деформацию под воздействием магнитного поля. Гуревич и др. показали, что при использовании пены SMP искусственная мышца может работать с очень низким модулем упругости 54 .
Частицы NdFeB обеспечивают программируемую деформацию под воздействием магнитного поля. Гуревич и др. показали, что при использовании пены SMP искусственная мышца может работать с очень низким модулем упругости 54 .
Композиты с памятью формы на основе углерода были исследованы для дальнейшего улучшения работы искусственных мышц. Путем синтеза проводящих композитов с памятью формы на основе углерода 55,56 , термоэлектрическое управление с джоулевым нагревом может быть удобно реализовано. Кроме того, композиты SMP/углеродные нанотрубки (CNT) могут управляться тепловым эффектом микроволн, хотя чистый SMP не реагировал на микроволны 57 . Кроме того, механические свойства можно регулировать с помощью углеродных наноматериалов в композитах. Юань и др. сравнили нанокомпозитные волокна поливинилового спирта (ПВС), ПВС-УНТ и ПВС-оксида графена в качестве вращательных микроприводов 58 . Хотя максимальная деформация при растяжении была ниже 30%, при вставке крутки в нанокомпозитные волокна был достигнут высокий крутящий момент с большими углами поворота.
Пневматические и гидравлические искусственные мышцы
Искусственные мышцы, основанные на давлении, быстро развиваются для применения в мягких роботах. Мягкие роботы, оснащенные пневматическими и гидравлическими искусственными мышцами, могут обеспечить превосходную совместимость и безопасность для интерактивных приложений. Как правило, искусственные мышцы, основанные на давлении, могут создавать силы в диапазоне от 0,01 до 100 МПа, в то время как типичный ход составляет 10–100%. Эффективный модуль гидравлических искусственных мышц обычно выше, чем у пневматических искусственных мышц, а это означает, что гидравлические мышцы имеют тенденцию генерировать большую силу. Хотя обычно приводы, основанные на давлении, менее предпочтительны в микросистемах, чем другие механизмы, такие как электро- и термореактивные искусственные мышцы 13 , недавние исследования показали, что микроискусственные мышцы, основанные на давлении, также могут обеспечивать превосходную силу и ход 59,60 .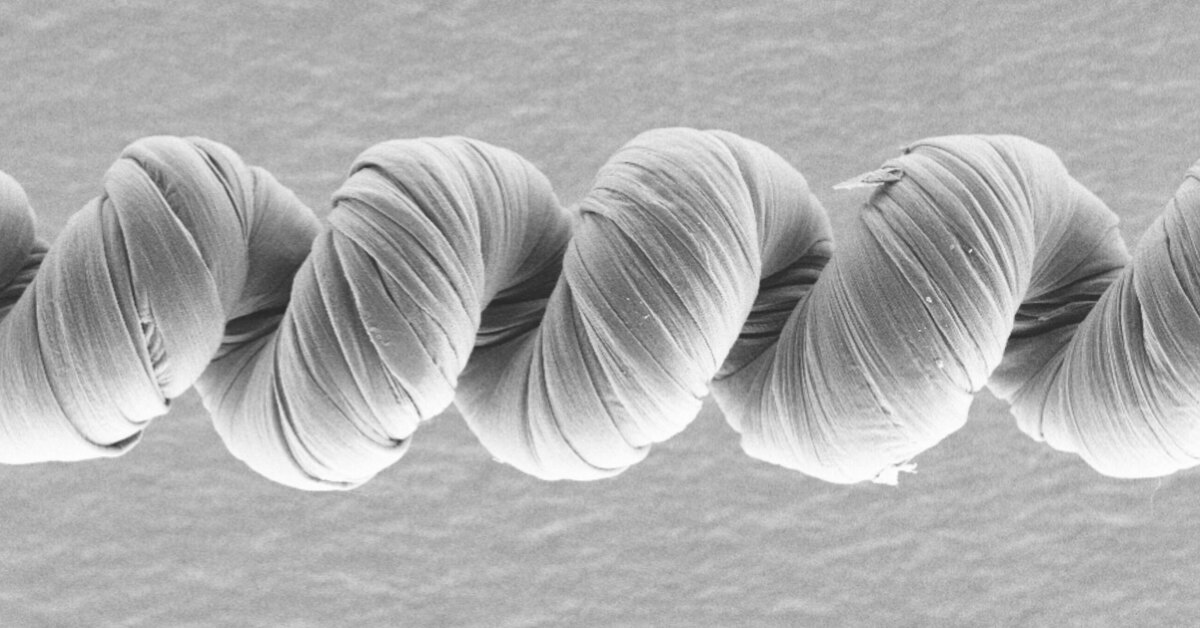 Некоторые передовые процессы изготовления были изучены и способствовали миниатюризации пневматических и гидравлических искусственных мышц. Например, использование 3D-печати может предоставить дополнительную свободу для их проектирования и изготовления 22,61,62 . Лазерная резка может использоваться для двумерного изготовления тонких пневматических искусственных мышц с высокой точностью 63 . Б. Гориссен исследовал процесс высококачественного реактивного ионного травления гибких жидкостных микроприводов из ПДМС 64 . Было проведено несколько систематических обзоров искусственных мышц на основе микродавления 13,65 .
Некоторые передовые процессы изготовления были изучены и способствовали миниатюризации пневматических и гидравлических искусственных мышц. Например, использование 3D-печати может предоставить дополнительную свободу для их проектирования и изготовления 22,61,62 . Лазерная резка может использоваться для двумерного изготовления тонких пневматических искусственных мышц с высокой точностью 63 . Б. Гориссен исследовал процесс высококачественного реактивного ионного травления гибких жидкостных микроприводов из ПДМС 64 . Было проведено несколько систематических обзоров искусственных мышц на основе микродавления 13,65 .
Искусственные мышцы, основанные на давлении, широко используются в новых мягких роботах. Граница между мягкими роботами и исследованиями искусственных мышц в некоторых случаях размыта. Эти исследования обычно частично совпадают; например, искусственная мышца может работать как концевой эффектор и оказывать решающее влияние на работу мягкого робота.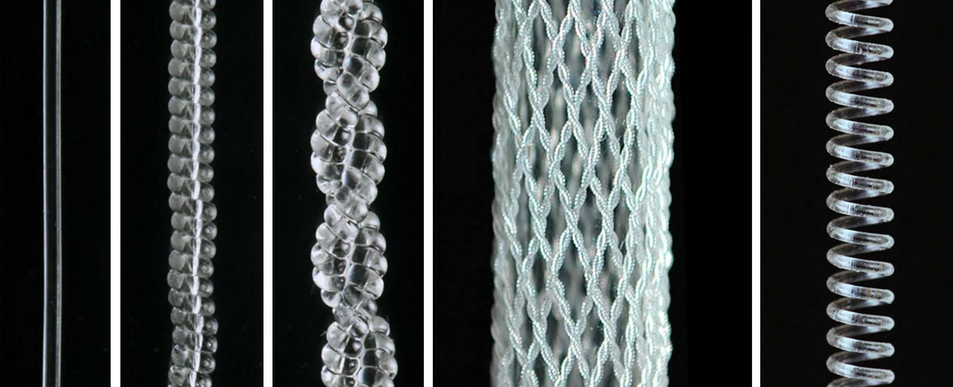 Однако исследования мягкой робототехники обычно делают упор на систематическую архитектуру; таким образом, он включает в себя больше стратегий контроля и практических приложений 66 . С другой стороны, исследования искусственных мышц в основном сосредоточены на инновациях и улучшении конструкций материалов и устройств 4 .
Однако исследования мягкой робототехники обычно делают упор на систематическую архитектуру; таким образом, он включает в себя больше стратегий контроля и практических приложений 66 . С другой стороны, исследования искусственных мышц в основном сосредоточены на инновациях и улучшении конструкций материалов и устройств 4 .
Конструкция конструкции оказывает значительное влияние на характеристики искусственных мышц, такие как деформация и создаваемая сила. Как правило, искусственные мышцы, основанные на давлении, состоят из эластичных камер и структурных ограничений. Изменение давления приводит к направленной деформации. Структурные ограничения ограничивают деформацию срабатывания до одного измерения для создания управляемого растяжения/сжатия, изгиба или кручения. Мышцы Мак-Киббена с эластичными трубками и тканевыми рукавами являются классическими и хорошо изученными. Тканые и трикотажные ткани также могут быть заделаны в эластомер. Эти ткани могут выдерживать высокое давление до нескольких сотен килопаскалей и создавать деформации более 100%, хотя задержка и потери на трение между тканью и эластомером относительно высоки.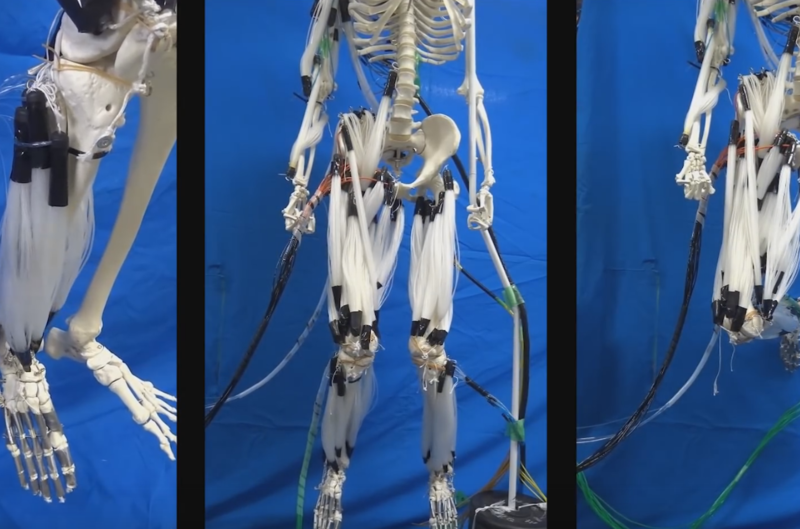 Помимо мышц на тканевой основе, пневматические мягкие приводы с использованием низкомодульной резины и структур с несколькими воздушными камерами могут обеспечить податливое и ловкое срабатывание за счет управления камерами по отдельности, но создаваемая сила относительно невелика. Некоторые податливые конструкции, такие как гофрированные, складчатые и гофрированные конструкции, могут использоваться с более твердыми материалами, так что эти приводы могут достигать как высокой выходной мощности, так и сверхбольших деформаций. Эти приводы привлекли большое внимание в последние годы.
Помимо мышц на тканевой основе, пневматические мягкие приводы с использованием низкомодульной резины и структур с несколькими воздушными камерами могут обеспечить податливое и ловкое срабатывание за счет управления камерами по отдельности, но создаваемая сила относительно невелика. Некоторые податливые конструкции, такие как гофрированные, складчатые и гофрированные конструкции, могут использоваться с более твердыми материалами, так что эти приводы могут достигать как высокой выходной мощности, так и сверхбольших деформаций. Эти приводы привлекли большое внимание в последние годы.
Разработка мягких, малых и портативных источников энергии является серьезной проблемой для пневматических искусственных мышц и мягких роботов 66 . Венер и др. сравнил и проанализировал несколько пневматических источников энергии для мягкой робототехники 67 . Эти авторы обнаружили, что микрокомпрессоры имеют относительно высокую производительность, но низкое максимальное давление и скорость потока.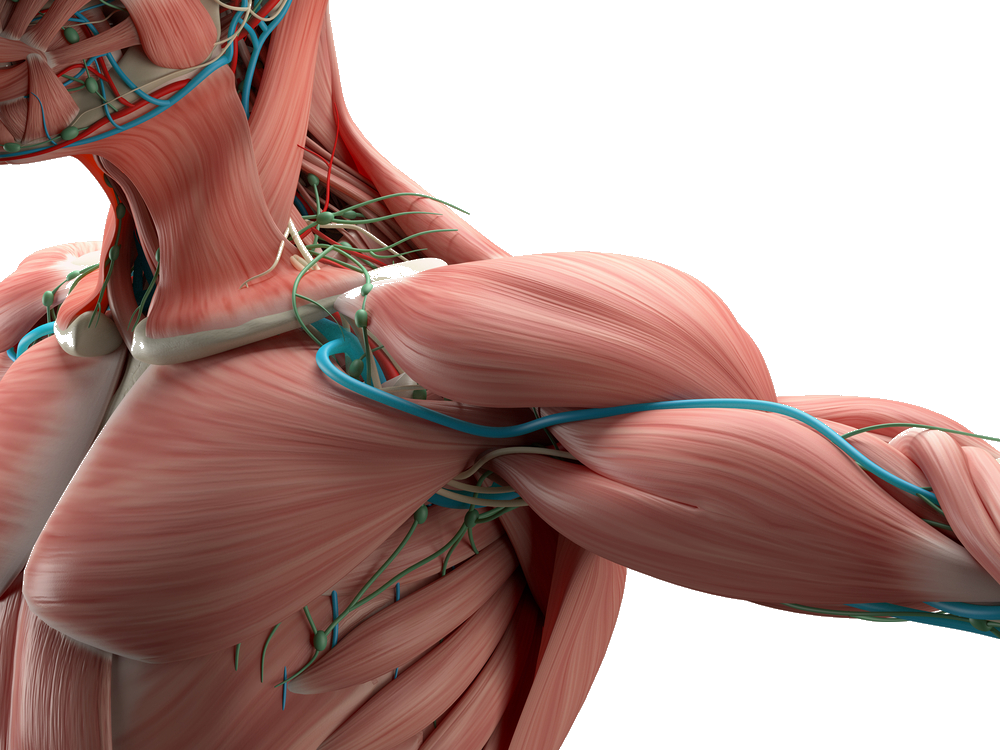 Горение обеспечивало высокую плотность энергии, но пиковые силы были слишком велики для многих мягких роботов. Баллоны с жидкостью под высоким давлением имеют ограниченную емкость; поэтому время работы ограничено. Разложение монотоплива (перекись водорода) может обеспечить энергию с простой структурой, но все же требует разработки на системном уровне. Тем не менее, были предприняты некоторые усилия по разработке автономных небольших мягких роботов с бортовыми источниками энергии 9.0112 22 . В дополнение к источникам питания, упомянутым выше, электролиз также использовался для привода диафрагменных приводов, как сообщает Pang et al. 68 . На рис. 3b представлены полностью мягкие автономные роботы, работающие за счет каталитического разложения бортового монотопливного топлива 69 .
Горение обеспечивало высокую плотность энергии, но пиковые силы были слишком велики для многих мягких роботов. Баллоны с жидкостью под высоким давлением имеют ограниченную емкость; поэтому время работы ограничено. Разложение монотоплива (перекись водорода) может обеспечить энергию с простой структурой, но все же требует разработки на системном уровне. Тем не менее, были предприняты некоторые усилия по разработке автономных небольших мягких роботов с бортовыми источниками энергии 9.0112 22 . В дополнение к источникам питания, упомянутым выше, электролиз также использовался для привода диафрагменных приводов, как сообщает Pang et al. 68 . На рис. 3b представлены полностью мягкие автономные роботы, работающие за счет каталитического разложения бортового монотопливного топлива 69 .
Рис. 3: Пневматические и гидравлические искусственные мышцы.
a Мягкий пневматический привод, выдвигающийся из наконечника 71 . Авторские права принадлежат AAAS, 2017 г. Перепечатано с разрешения. b Полностью мягкий автономный робот 69 . Авторские права принадлежат Springer Nature, 2016 г. Перепечатано с разрешения. c A Микрощупальце из PDMS, способное изгибаться по спирали 60 . Воспроизведено из исх. 60 (2019, CC BY 4.0). d Искусственный захват с использованием магнитоиндуцированных фазовых переходов жидкость-газ 73 . Copyright 2020 AAAS. Перепечатано с разрешения. e Гибкий жидкостный микропривод 64 . Воспроизведено из исх. 64 (2016, CC BY 4.0). f Мягкие микропальцы для манипуляций с клеточными агрегатами 75 . Воспроизведено из исх. 75 (2016, CC BY 4.0). г Электропневматические насосы Soft 76 . Copyright 2021 AAAS. Перепечатано с разрешения
Авторские права принадлежат AAAS, 2017 г. Перепечатано с разрешения. b Полностью мягкий автономный робот 69 . Авторские права принадлежат Springer Nature, 2016 г. Перепечатано с разрешения. c A Микрощупальце из PDMS, способное изгибаться по спирали 60 . Воспроизведено из исх. 60 (2019, CC BY 4.0). d Искусственный захват с использованием магнитоиндуцированных фазовых переходов жидкость-газ 73 . Copyright 2020 AAAS. Перепечатано с разрешения. e Гибкий жидкостный микропривод 64 . Воспроизведено из исх. 64 (2016, CC BY 4.0). f Мягкие микропальцы для манипуляций с клеточными агрегатами 75 . Воспроизведено из исх. 75 (2016, CC BY 4.0). г Электропневматические насосы Soft 76 . Copyright 2021 AAAS. Перепечатано с разрешения
Изображение в полный размер
Пневматические искусственные мышцы могут генерировать линейные, скручивающие и изгибающие движения, но скручивающие устройства менее изучены, чем другие.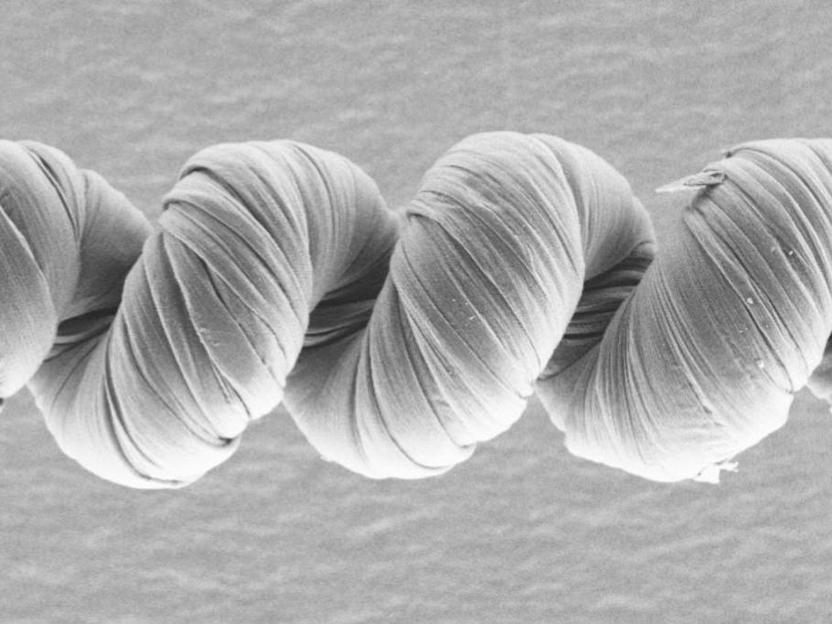 Гориссен и др. сообщили о гибкой пневматической скручивающейся искусственной мышце, которая обеспечивала двунаправленное вращение 6,5°/мм при давлении 178 кПа 70 . Кроме того, недавно были исследованы некоторые эффективные конфигурации для обеспечения удлинения. Например, Хоукс и др. разработал мягкий пневматический привод, который может выдвигаться из кончика корпуса (рис. 3а) 71 . Он имеет встроенную функцию обнаружения для реализации активного управления направлением и особенно полезен для навигации в узких местах. Блюменшайн и др. изучал аналогичную конструкцию с выдвижным концом для развертывания антенн 72 . Миниатюризация искусственных мышц, основанных на давлении, является сложной задачей, но было проведено множество исследований. На рис. 3с показано микрощупальце, которое может обеспечивать приведение в действие изгиба спирали и удерживать муравья 9.0112 60 . Для приводов, работающих под давлением, создаваемая сила пропорциональна площади поперечного сечения привода 13 .
Гориссен и др. сообщили о гибкой пневматической скручивающейся искусственной мышце, которая обеспечивала двунаправленное вращение 6,5°/мм при давлении 178 кПа 70 . Кроме того, недавно были исследованы некоторые эффективные конфигурации для обеспечения удлинения. Например, Хоукс и др. разработал мягкий пневматический привод, который может выдвигаться из кончика корпуса (рис. 3а) 71 . Он имеет встроенную функцию обнаружения для реализации активного управления направлением и особенно полезен для навигации в узких местах. Блюменшайн и др. изучал аналогичную конструкцию с выдвижным концом для развертывания антенн 72 . Миниатюризация искусственных мышц, основанных на давлении, является сложной задачей, но было проведено множество исследований. На рис. 3с показано микрощупальце, которое может обеспечивать приведение в действие изгиба спирали и удерживать муравья 9.0112 60 . Для приводов, работающих под давлением, создаваемая сила пропорциональна площади поперечного сечения привода 13 . Это означает, что для микромасштабных искусственных мышц создаваемая сила может быть относительно низкой, но это может быть особой возможностью для микроманипуляций с некоторыми микромасштабными биоматериалами (такими как устройства, показанные на рис. 3в, е). Во многих исследованиях в качестве мягких захватов применялись пневматические искусственные мышцы. Например, Мирвакили и др. представили искусственный пневматический захват (рис. 3d), использующий магнитно-индуцированные фазовые переходы жидкость-газ, так что громоздкие периферийные насосы не понадобились. Объемное расширение при фазовом переходе привело к значительному изменению давления, что может быть использовано для пневматической искусственной мышцы 73 . Это обеспечивало деформацию до 20% в течение 10 с. Сонг и др. сообщили о мягком захвате с микрофибриллярным клеем на мягкой деформируемой мембране 74 . Мягкая основа делает захват пригодным для манипулирования деталями сложной формы за счет активного растяжения мягкой мембраны.
Это означает, что для микромасштабных искусственных мышц создаваемая сила может быть относительно низкой, но это может быть особой возможностью для микроманипуляций с некоторыми микромасштабными биоматериалами (такими как устройства, показанные на рис. 3в, е). Во многих исследованиях в качестве мягких захватов применялись пневматические искусственные мышцы. Например, Мирвакили и др. представили искусственный пневматический захват (рис. 3d), использующий магнитно-индуцированные фазовые переходы жидкость-газ, так что громоздкие периферийные насосы не понадобились. Объемное расширение при фазовом переходе привело к значительному изменению давления, что может быть использовано для пневматической искусственной мышцы 73 . Это обеспечивало деформацию до 20% в течение 10 с. Сонг и др. сообщили о мягком захвате с микрофибриллярным клеем на мягкой деформируемой мембране 74 . Мягкая основа делает захват пригодным для манипулирования деталями сложной формы за счет активного растяжения мягкой мембраны. Гориссен и др. разработали высокопроизводительный процесс травления для PDMS на основе масок SU8, которые использовались для гибких жидкостных микроактуаторов, как показано на рис. 3e 64 . Кониши и соавторы разработали мягкие микропальцы на основе PDMS (рис. 3f) для захвата и высвобождения клеточных агрегатов (диаметром 200 мкм) 75 без явных повреждений при приложении восстанавливающей силы до 1 мН. Дитесават и др. разработали мягкие электропневматические насосы, использующие электростатическую силу и диэлектрическую жидкость, толщиной всего 1,1 мм и весом 5,3 г (рис. 3g) 76 .
Гориссен и др. разработали высокопроизводительный процесс травления для PDMS на основе масок SU8, которые использовались для гибких жидкостных микроактуаторов, как показано на рис. 3e 64 . Кониши и соавторы разработали мягкие микропальцы на основе PDMS (рис. 3f) для захвата и высвобождения клеточных агрегатов (диаметром 200 мкм) 75 без явных повреждений при приложении восстанавливающей силы до 1 мН. Дитесават и др. разработали мягкие электропневматические насосы, использующие электростатическую силу и диэлектрическую жидкость, толщиной всего 1,1 мм и весом 5,3 г (рис. 3g) 76 .
Диэлектрический эластомер
Электроактивные полимеры (ЭАП) образуют класс полимеров, которые могут реагировать на электрическое поле, создавая механическое движение 77 . Эти полимеры можно просто разделить на две категории: активируемые полем EAP (такие как DE и пьезоэлектрические полимеры) и ионные EAP (такие как IPMC и ионные гели) 9 . В этом разделе мы сначала обсудим прогресс искусственной мышцы DE, которая также известна как привод DE или DEA.
В этом разделе мы сначала обсудим прогресс искусственной мышцы DE, которая также известна как привод DE или DEA.
В течение последних двух десятилетий искусственные мышцы DE привлекают все большее внимание после того, как R. Pelrine et al. в конце 1990-х годов сообщили о большой деформации при срабатывании и быстрой реакции акриловых и силиконовых эластомеров 9,15,78 из-за их быстрой реакции, больших деформаций, вязкости разрушения и отношения мощности к весу по сравнению с естественной мышцей. Базовую структуру искусственных мышц на основе ТЭ можно рассматривать как деформируемый конденсатор. Это управляемое полем давление на DE можно просто записать как p = ε 0 ε r E 2,14 , where ε 0 is vacuum permittivity, ε r is the relative dielectric constant of DE, а E – приложенное электрическое поле в DE. В условиях низкой деформации деформация толщины с z может быть приблизительно выражена как с z = − ε 0 ε r E 2 / Y , где Y – кажущийся модуль упругости.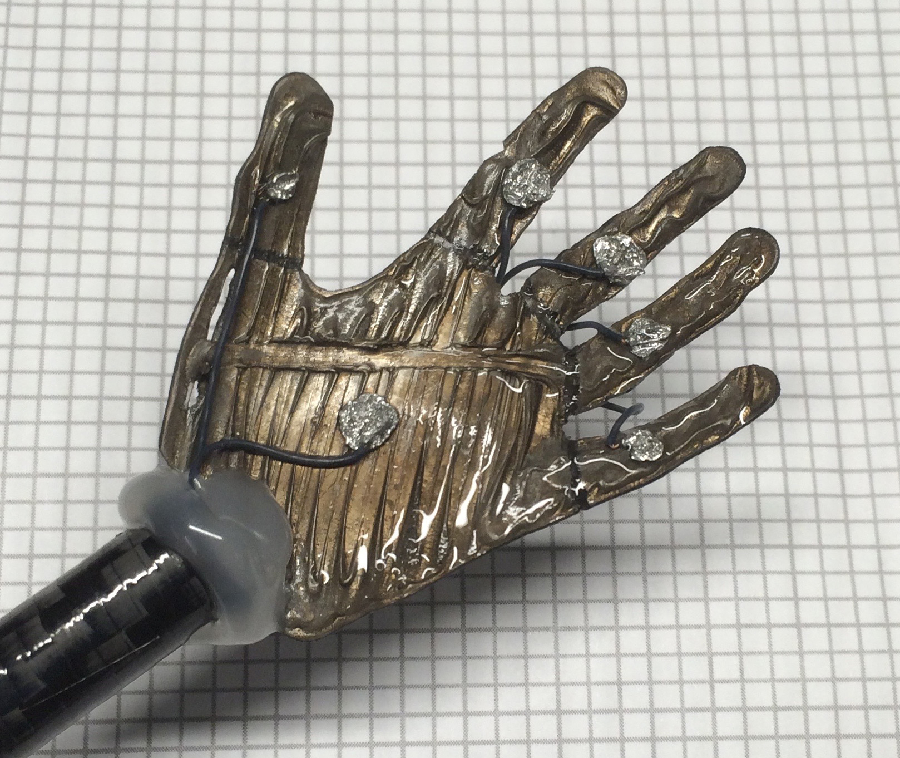
Согласно предыдущему исследованию 79 , вязкоупругость и диэлектрическая прочность искусственной мышцы DE требуют большего внимания для дальнейшего улучшения характеристик срабатывания и предотвращения ее выхода из строя. Вязкоупругость полимерных материалов обуславливает значительное вязкостное сопротивление на высоких частотах, что ограничивает скорость электромеханического отклика ДЭ. Предыдущее исследование показало, что вязкоупругость вызвана ограниченной свободой вращения полимерных цепей, и эту вязкоупругую потерю можно уменьшить путем добавления пластификатора в DE 9.0112 80 . Кроме того, типичное управляющее напряжение для DEA варьируется от нескольких сотен до нескольких тысяч вольт. Высокое напряжение приводит к высокой деформации, но максимальное напряжение часто ограничивается электромеханической нестабильностью эластомера. Чтобы уменьшить требуемое управляющее напряжение для требуемого уровня деформации, диэлектрическую проницаемость можно увеличить, введя функциональные наполнители в ДЭ 81,82 .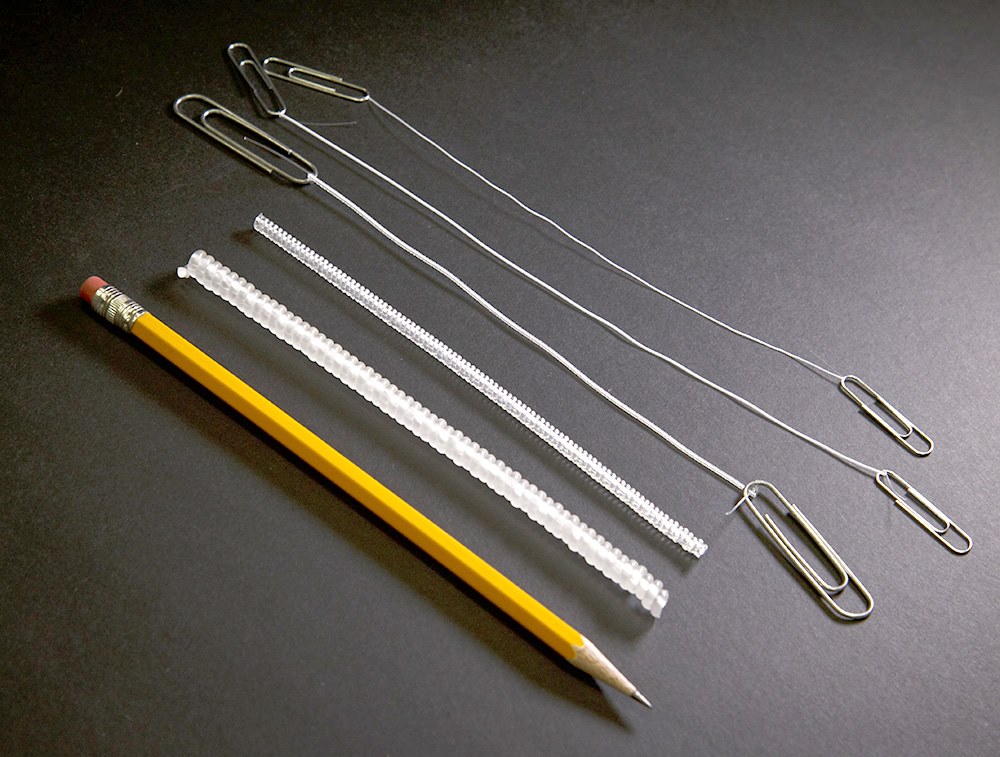 В примере реализованы как высокая диэлектрическая проницаемость, так и сильное поле пробоя с использованием частиц проводящего полианилина (ПАНИ), инкапсулированных в изолирующую полимерную оболочку перед диспергированием, как сообщает Molberg et al. 83 .
В примере реализованы как высокая диэлектрическая проницаемость, так и сильное поле пробоя с использованием частиц проводящего полианилина (ПАНИ), инкапсулированных в изолирующую полимерную оболочку перед диспергированием, как сообщает Molberg et al. 83 .
За последние несколько лет было достигнуто множество улучшений на уровне устройств и систем. Дудута и др. продемонстрировали высокоэффективную конструкцию искусственной мышцы из мягкого композита DE, состоящую из усиливающих напряжение эластомеров и электродов из УНТ. Пиковая плотность энергии достигала 19,8 Дж/кг 5 . Применяя самовосстанавливающиеся эластомеры, устройства DE могут реализовать способность к самовосстановлению 84,85,86 , которая является свойством естественных мышц. На рис. 4а показана самовосстанавливающаяся искусственная мышца DE, описанная Li et al. 84 . Процесс заживления мог происходить при температурах до -20 °C. Мэдсен и др. представил самовосстанавливающийся DE с ионно-сшитым силиконом 85 .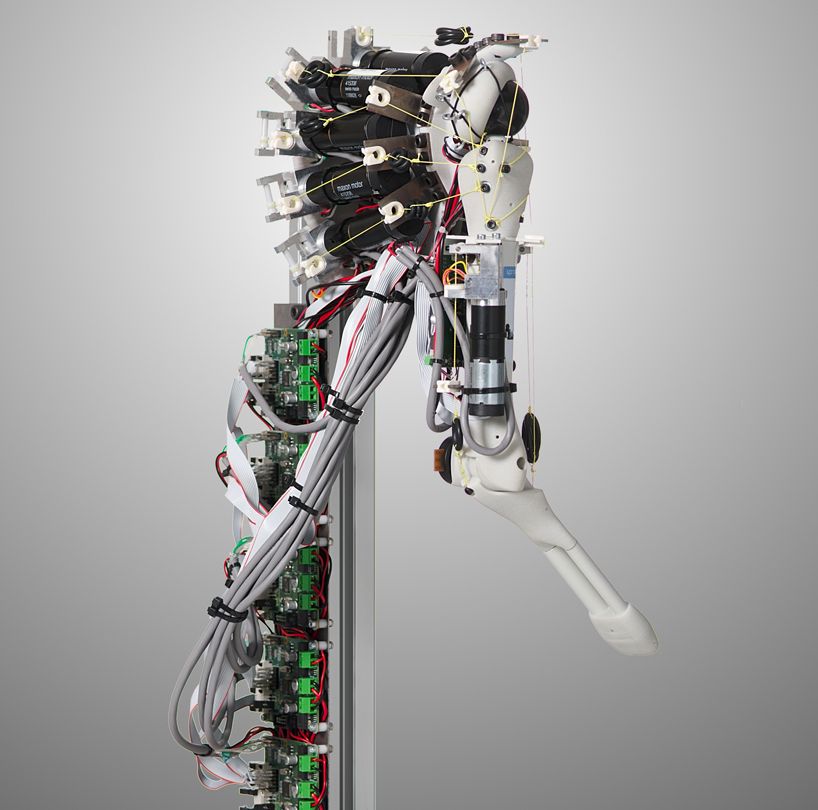 Две демонстрации системного уровня приведены на рис. 4b, c. На рис. 4b Ji et al. использовали многослойные DEA низкого напряжения в мягких непривязанных и автономных роботах с ногами. Устройство из чешуи насекомого может двигаться со скоростью 30 мм/с 87 . На рис. 4с представлена структура и управляемый полет микроробота, приводимого в движение центральной искусственной мышцей DE и соответствующими компонентами трансмиссии 9.0112 16 .
Две демонстрации системного уровня приведены на рис. 4b, c. На рис. 4b Ji et al. использовали многослойные DEA низкого напряжения в мягких непривязанных и автономных роботах с ногами. Устройство из чешуи насекомого может двигаться со скоростью 30 мм/с 87 . На рис. 4с представлена структура и управляемый полет микроробота, приводимого в движение центральной искусственной мышцей DE и соответствующими компонентами трансмиссии 9.0112 16 .
Рис. 4: Искусственные мышцы из диэлектрического эластомера.
a Высокоэластичный самовосстанавливающийся эластомер 84 . Авторские права принадлежат Springer Nature, 2016 г. Перепечатано с разрешения. b Робот размером с насекомое, приводимый в движение низковольтными искусственными мышцами DE 87 . Copyright 2019 AAAS. Перепечатано с разрешения. c Управляемый полет микроробота с использованием искусственных мышц DE 16 . Copyright 2019 Springer Nature. Перепечатано с разрешения
Перепечатано с разрешения
Увеличить
Ионно-полимерная искусственная мышца
Еще одним важным классом ЭАП являются ионные ЭАП, работа которых основана на миграции катионов и анионов в электрическом поле. IPMC представляют собой типичные ионно-полимерные искусственные мышцы, состоящие из ионопроводящей полиэлектролитной мембраны, зажатой между гибкими электродами 13,88 . Полиэлектролитная мембрана содержит сильные ионные группы, такие как серная кислота, присоединенные к основной цепи стабильного полимера 89 . Эти высокоионные кластеры обеспечивают подвижные ионы. В большинстве случаев анионы закрепляются на основной цепи полимера, а подвижные гидратированные катионы транспортируются к катоду под действием приложенного электрического поля, что приводит к неуравновешенному напряжению в мембране и изгибу в направлении анода.
В отличие от искусственных мышц DE, IPMC могут обеспечивать высокую деформацию изгиба при срабатывании в ответ на гораздо более низкое напряжение, обычно от 1 до 5 В 4,89,90 , хотя требуются электролиты с подвижными ионами 90 . Низкое рабочее напряжение является значительным преимуществом, позволяющим использовать его во многих биомедицинских и МЭМС-приложениях. Однако ранние IPMC должны были работать в водной среде, поэтому электролиз молекул воды и испарение на открытом воздухе значительно ограничивали их производительность. Ионные жидкости (ИЖ) имеют низкую летучесть, широкие потенциальные окна и высокую ионную проводимость, что может эффективно улучшить скорость отклика и стабильность IPMC на открытом воздухе 90 . Еще одна проблема для IPMC заключается в том, что процесс изготовления металлических электродов необходимо тщательно оптимизировать, чтобы сбалансировать гибкость, проводимость и надежность. Появление проводящих углеродных наноматериалов обеспечивает многообещающую альтернативу гибким электродам 91,92,93 .
Низкое рабочее напряжение является значительным преимуществом, позволяющим использовать его во многих биомедицинских и МЭМС-приложениях. Однако ранние IPMC должны были работать в водной среде, поэтому электролиз молекул воды и испарение на открытом воздухе значительно ограничивали их производительность. Ионные жидкости (ИЖ) имеют низкую летучесть, широкие потенциальные окна и высокую ионную проводимость, что может эффективно улучшить скорость отклика и стабильность IPMC на открытом воздухе 90 . Еще одна проблема для IPMC заключается в том, что процесс изготовления металлических электродов необходимо тщательно оптимизировать, чтобы сбалансировать гибкость, проводимость и надежность. Появление проводящих углеродных наноматериалов обеспечивает многообещающую альтернативу гибким электродам 91,92,93 .
Ким и др. сообщили о высокопроизводительном прочном IPMC на основе одноионопроводящих полимеров с одностенными электродами из УНТ с обеих сторон (рис. 5а) 94 . Этот ИПМК мог обеспечить смещение миллиметрового масштаба при напряжении всего 1 В, а время отклика находилось на уровне десятков миллисекунд. Это исследование показывает эффективный путь улучшения искусственных мышц IPMC путем введения новых ионных полимеров. Кроме того, время отклика IPMC в значительной степени ограничено низкой подвижностью ионов на границе раздела электродов и в теле электрода. Чтобы решить эту проблему, Umrao et al. исследовали композиты MXene в качестве эффективных гибких электродов (рис. 5b) 95 . Их устройство показывает деформации изгиба 1,37% при синусоидальном входном напряжении 1 В и 0,1 Гц. Кроме того, в обоих вышеупомянутых исследованиях проводилось срабатывание без релаксации спины. Обратная релаксация является основным недостатком IPMC при напряжении постоянного тока, что означает, что IPMC будут медленно релаксировать после достижения пикового смещения. На рис. 5d показан электрохимический привод на основе графдиина 96 с высокой эффективностью электромеханического преобразования до 6,03%.
Этот ИПМК мог обеспечить смещение миллиметрового масштаба при напряжении всего 1 В, а время отклика находилось на уровне десятков миллисекунд. Это исследование показывает эффективный путь улучшения искусственных мышц IPMC путем введения новых ионных полимеров. Кроме того, время отклика IPMC в значительной степени ограничено низкой подвижностью ионов на границе раздела электродов и в теле электрода. Чтобы решить эту проблему, Umrao et al. исследовали композиты MXene в качестве эффективных гибких электродов (рис. 5b) 95 . Их устройство показывает деформации изгиба 1,37% при синусоидальном входном напряжении 1 В и 0,1 Гц. Кроме того, в обоих вышеупомянутых исследованиях проводилось срабатывание без релаксации спины. Обратная релаксация является основным недостатком IPMC при напряжении постоянного тока, что означает, что IPMC будут медленно релаксировать после достижения пикового смещения. На рис. 5d показан электрохимический привод на основе графдиина 96 с высокой эффективностью электромеханического преобразования до 6,03%. Подтвержденный эффект перехода алкен-алкинового комплекса связан с этим ионно-полимерным приводом на основе графдиина.
Подтвержденный эффект перехода алкен-алкинового комплекса связан с этим ионно-полимерным приводом на основе графдиина.
Рис. 5: IPMC и их применение.
a IPMC с низким управляющим напряжением, использующие полимеры с одноионной проводимостью 94 . Воспроизведено из исх. 94 (2016, CC BY 4.0). b Привод IPMC с электродами MXene 95 . Copyright 2019 AAAS. Перепечатано с разрешения. c IPMC имитируют стрекозу с машущими крыльями и цветок с использованием источников питания переменного и постоянного тока 97 . Авторские права принадлежат Wiley, 2019 г. Перепечатано с разрешения. d Привод IPMC на основе Graphdiyne с эффективностью электромеханического преобразования до 6,03% 96 . Воспроизведено из исх. 96 (2018, CC BY 4.0)
Увеличенное изображение
Высокопроизводительные искусственные мышцы IPMC были применены в биомиметических мягких роботах. Как показано на рис. 5c, Ma et al. сообщил о IPMC Nafion с гомодисперсными металлическими электродами 97 , который был в состоянии имитировать быстрые взмахи крыльев стрекозы при переменном напряжении 19 В.Гц, а искусственный цветок под напряжением постоянного тока. Кроме того, Must и соавт. представил IPMC, состоящий из электродов на основе активированного угля и IL 98 . С бортовой литиевой батареей непривязанный биомиметический дюймовый червь мог ползать по гладкой поверхности. Другие исследования связаны с такими приложениями, как роботизированная рыба 99 .
Как показано на рис. 5c, Ma et al. сообщил о IPMC Nafion с гомодисперсными металлическими электродами 97 , который был в состоянии имитировать быстрые взмахи крыльев стрекозы при переменном напряжении 19 В.Гц, а искусственный цветок под напряжением постоянного тока. Кроме того, Must и соавт. представил IPMC, состоящий из электродов на основе активированного угля и IL 98 . С бортовой литиевой батареей непривязанный биомиметический дюймовый червь мог ползать по гладкой поверхности. Другие исследования связаны с такими приложениями, как роботизированная рыба 99 .
В дополнение к искусственным мышцам IPMC, усовершенствование гидрогелей в последние годы 100,101 делает ионные искусственные мышцы на основе гидрогелей особенно перспективными из-за их превосходной податливости и биосовместимости. Ян и Суо рассмотрели ионотронные устройства, включая искусственные мышцы и электронные скины, на основе ионных гидрогелей 102 . Углеродные нанотрубки и графен также можно использовать для формирования ионных искусственных мышц 90 . Эти устройства работают на основе силы электростатического отталкивания между одноименными зарядами, инжектируемыми в активирующую нанотрубку 103 . Этот тип привода часто имеет низкую деформацию (<2%) из-за высокой жесткости УНТ.
Эти устройства работают на основе силы электростатического отталкивания между одноименными зарядами, инжектируемыми в активирующую нанотрубку 103 . Этот тип привода часто имеет низкую деформацию (<2%) из-за высокой жесткости УНТ.
Пьезоэлектрические искусственные мышцы
Пьезоэлектрические материалы уже давно широко используются в микроактуаторах. Эти материалы имеют множество применений, например, приводы микролинз 104 , поворотные 105 и шаговые линейные приводы 106 , микронасосы 107 и микрозахваты 108 . Предыдущие исследования были подробно рассмотрены в ссылках. 109 110 .
Пьезоэлектрические искусственные мышцы имеют много преимуществ, в том числе простую структуру, обеспечивающую миниатюризацию, относительно высокую удельную мощность при небольшом масштабе и выдающуюся эффективность. Кроме того, усовершенствование производственного процесса обеспечивает дополнительную свободу для проектирования микропьезоэлектрических приводов, таких как 3D-печать пьезоэлектрических материалов с заданной анизотропией, о которой сообщает Cui et al. 111 . Однако основные проблемы с пьезоэлектрическими искусственными мышцами включают высокую жесткость, малую деформацию и относительно высокое рабочее напряжение, которые несовместимы с приложениями с искусственными мышцами, требующими согласованного взаимодействия. Жесткость или механический импеданс можно уменьшить путем применения мягких пьезоэлектрических материалов (таких как пьезоэлектрические полимеры, композиты и другие органические пьезоэлектрические материалы 112 ) и внедрения податливых структур 113 . Хотя мягкие пьезоэлектрические материалы широко изучались для сбора энергии 114,115 и датчиков 116,117,118 , в настоящее время было проведено меньше исследований приводов на основе этих материалов. Некоторые примеры включают мягких роботов размером с насекомое, использующих изогнутые пьезоэлектрические пленки из поливинилиденфторида (ПВДФ) 119,120 . О другом консольном приводе с использованием биморфа PVDF 121 сообщили Liu et al.
111 . Однако основные проблемы с пьезоэлектрическими искусственными мышцами включают высокую жесткость, малую деформацию и относительно высокое рабочее напряжение, которые несовместимы с приложениями с искусственными мышцами, требующими согласованного взаимодействия. Жесткость или механический импеданс можно уменьшить путем применения мягких пьезоэлектрических материалов (таких как пьезоэлектрические полимеры, композиты и другие органические пьезоэлектрические материалы 112 ) и внедрения податливых структур 113 . Хотя мягкие пьезоэлектрические материалы широко изучались для сбора энергии 114,115 и датчиков 116,117,118 , в настоящее время было проведено меньше исследований приводов на основе этих материалов. Некоторые примеры включают мягких роботов размером с насекомое, использующих изогнутые пьезоэлектрические пленки из поливинилиденфторида (ПВДФ) 119,120 . О другом консольном приводе с использованием биморфа PVDF 121 сообщили Liu et al. Соответствующие конструкции могут помочь отрегулировать выходную деформацию и усилие 122 . Вандерборхт и др. предоставил классификацию приводов переменной жесткости/сопротивления 123 . Хотя усилие срабатывания пьезоэлектрических приводов в целом невелико, его можно увеличить, введя соответствующие механизмы усиления. Например, недавно был разработан усиленный пьезоэлектрический привод на основе пьезогидравлического насоса 124 . Кизироглу и др. недавно рассмотренные стратегии и соответствующие характеристики для усиления микродвижений 125 . На рис. 6c показан высокоточный робот Delta 126 миллиметрового масштаба. Робот приводится в движение тремя независимыми пьезоэлектрическими приводами гибки и системой трансмиссии. Он может работать в рабочем пространстве 7,01 мм 3 с высокой точностью ~ 5 мкм. На рис. 6d Судзуки и Вудс разработали ловкий миниатюрный манипулятор оригами с удаленным центром движения для малоинвазивной хирургии, состоящий из пьезоэлектрических линейных приводов и выдвижной параллелограммной конструкции 127 .
Соответствующие конструкции могут помочь отрегулировать выходную деформацию и усилие 122 . Вандерборхт и др. предоставил классификацию приводов переменной жесткости/сопротивления 123 . Хотя усилие срабатывания пьезоэлектрических приводов в целом невелико, его можно увеличить, введя соответствующие механизмы усиления. Например, недавно был разработан усиленный пьезоэлектрический привод на основе пьезогидравлического насоса 124 . Кизироглу и др. недавно рассмотренные стратегии и соответствующие характеристики для усиления микродвижений 125 . На рис. 6c показан высокоточный робот Delta 126 миллиметрового масштаба. Робот приводится в движение тремя независимыми пьезоэлектрическими приводами гибки и системой трансмиссии. Он может работать в рабочем пространстве 7,01 мм 3 с высокой точностью ~ 5 мкм. На рис. 6d Судзуки и Вудс разработали ловкий миниатюрный манипулятор оригами с удаленным центром движения для малоинвазивной хирургии, состоящий из пьезоэлектрических линейных приводов и выдвижной параллелограммной конструкции 127 . Диапазон движения концевого эффектора можно эффективно контролировать, изменяя структуру рычага.
Диапазон движения концевого эффектора можно эффективно контролировать, изменяя структуру рычага.
Рис. 6: Пьезоэлектрические искусственные мышцы для микроробототехники.
a Непривязной пьезоэлектрический летательный аппарат с питанием от фотогальванической батареи 128 . Copyright 2019 Springer Nature. Перепечатано с разрешения. b Быстроходный мягкий робот на основе PVDF 119 . Движение происходит по колебательной траектории центра масс, похожей на траекторию таракана. Авторское право 2019по АААС. Перепечатано с разрешения. c Дельта-робот миллиметрового размера, приводимый в движение тремя пьезоэлектрическими приводами гибки 126 . Copyright 2018 AAAS. Перепечатано с разрешения. d Миниатюрный манипулятор в стиле оригами с удаленным центром движения для микрохирургии 127 . Copyright 2020 Springer Nature. Перепечатано с разрешения
Полноразмерное изображение
За последние годы был достигнут некоторый прогресс на системном уровне, как показано на рис. 6, что свидетельствует о потенциале создания высокопроизводительных автономных микророботов на основе пьезоэлектрических искусственных мышц. Например, пьезоэлектрические приводы использовались в микролетательных аппаратах с машущими крыльями 9.0112 17 128 . На рис. 6а показан микроразмерный летательный аппарат с машущим крылом без привязи, основанный на приводах PZT, армированных оксидом алюминия, приводимых в действие фотогальванической батареей 128 . Вся система весила всего 259 мг, а потребляемая мощность составляла 110–120 мВт. Этот аппарат демонстрирует возможность беспрепятственного полета с дополнительной грузоподъемностью. Кроме того, Goldberg et al. сообщили об автономном микророботе с радиочастотной связью и встроенной батареей. 129 . Это устройство реализовывало быстрое прямолинейное движение со скоростью 17,2 см/с (3,8 длины тела в секунду). Рисунок 6b представляет собой биомиметический мягкий робот простой изогнутой конфигурации на основе униморфной пленки PVDF 9. 0112 119 , который может быстро бегать с относительной скоростью 20 длин тела в секунду по траектории с колебательным центром масс. этих полностью гибких роботов.
Мягкие магнитные искусственные мышцы
Магнитное поле эффективно для обеспечения неограниченной движущей силы и одновременного управления микророботами 130,131 . Искусственные мышцы, управляемые магнитными полями, обычно основаны на дискретных или непрерывных профилях намагниченности 13 . Отдельные микромагниты с надлежащими мягкими соединениями используются для дискретных профилей намагничивания. Непрерывный профиль намагничивания требует, чтобы магнитные частицы были диспергированы по всему мягкому полимеру 7 , такому как PDMS 132 или гидрогель 130 . Эти непрерывные магнитные композиты, как правило, обеспечивают лучшую податливость, хотя величины намагниченности ниже 13 .
В качестве значительного преимущества магнитомягкие искусственные мышцы обычно не привязаны. Магнитное поле придает дополнительную гибкость этому типу искусственных мышц, особенно для операций in vivo в человеческом теле. Он может проникать во многие материалы и программироваться в пространстве 133,134 . Привлекательным применением являются микроскопические искусственные пловцы, которые быстро развиваются в последние годы 130,135,136,137 . Эти микропловцы используют биоинспирированный жгутиковый двигательный механизм, конструкция которого состоит из микротела и жгутика. Как показано на рис. 7а 130 , Хуанг и др. сообщили о микропловцах на основе магнитного гидрогеля и исследовали адаптивное передвижение микропловцов в сложной жидкостной и магнитной среде. На рис. 7c Ren et al. 138 . продемонстрировал микропловец, который может избирательно перемещать объекты в воде под контролем внешнего колеблющегося магнитного поля. В качестве активных приводных компонентов использовались магнитные композитные эластомеры (Ecoflex/NdFeB). На рис. 7б представлено исследование мягких континуальных роботов субмиллиметрового масштаба на основе ферромагнитных полимерных композитов 9.0112 132 . Слой гидрогеля был использован для покрытия композитов, чтобы уменьшить трение. На рис. 7d показано ползание многоногого мягкого робота миллиметрового масштаба в микроканале, заполненном силиконовым маслом. Робот был изготовлен на основе недавно разработанного метода УФ-литографии для формирования рисунка частиц с постоянными магнитами в композитной пленке 139 . Микромагнитный робот с дискретным профилем намагниченности показан на рис. 7д 140 . Массивы программируемых однодоменных наномагнитов на соединенных панелях могут управляться в ответ на приложенное магнитное поле с высокой маневренностью. Закодированное направление намагниченности указано на диаграммах красными стрелками.
Рис. 7: Мягкие магнитомягкие искусственные мышцы.
a Оптические изображения сконструированных искусственных микропловцов (вверху) и движения гибкой спирали по изогнутому каналу (внизу) 130 . Воспроизведено из исх. 130 (2019, CC BY 4.0). b Ферромагнитные роботы из мягкого континуума и навигация по извилистому пути (вверху) и трехмерная цереброваскулярная фантомная сеть (внизу) 132 . Copyright 2019 AAAS. Перепечатано с разрешения. c Похожий на медузу микроплавун, демонстрирующий способность избирательно перемещать большие шарики 138 . Воспроизведено из исх. 138 (2019, CC BY 4.0). d Гибкий робот с программируемой трехмерной намагниченностью и движением. (масштабная линейка: 4 мм) 139 . Copyright 2019 AAAS. Перепечатано с разрешения. e Птица-оригами в микромасштабе с несколькими режимами изменения формы (масштабные линейки: 30 мкм) 140 . Copyright 2019 Springer Nature. Перепечатано с разрешения
Изображение в полный размер
В дополнение к вышеупомянутым шести категориям приводных механизмов, искусственные мышцы могут быть альтернативно реализованы с помощью молекулярных машин, химического топлива (например, глюкозы 141 ), жидкокристаллических эластомеров 142 и терморасширения полимеров и нанокомпозиты 143 . Например, разработка искусственных молекулярных машин предлагает потенциальные возможности для имитации естественных макромолекулярных машин в мышцах на молекулярном уровне в будущем, хотя современные искусственные молекулярные машины часто меньше и проще, чем биологические макромолекулярные машины. В частности, появление реагирующей на стимулы молекулярной машины, разработанной Livoreil et al. 144 и Bissell et al. 145 в 1994 году привлек большое внимание к этой области. На макроуровне некоторые исследователи исследовали искусственные мышцы, приводимые в действие химическими реакциями. Ян и др. разработаны автономные ползающие роботы, работающие на каталитическом сжигании метанола 146 . Венер и др. сообщил о полностью мягком роботе, работающем на газе, полученном в результате каталитического разложения бортового топлива 22 . Кроме того, Он и соавт. сообщили о новом мягком трубчатом приводе с использованием жидкокристаллического эластомера с электрическим управлением. Этот привод обеспечивает несколько режимов срабатывания, включая сжатие, изгибание и расширение 142 . В последнее время некоторые микроповерхностные электрохимические актуаторы 147,148 на основе металлических пленок продемонстрировали выдающиеся характеристики в водной среде, например, работая при ~1 В и достигая субмикронного радиуса кривизны.
Гели, реагирующие на стимуляцию, — еще один многообещающий вариант искусственных мышц. Эта область очень быстро развивалась в последнее десятилетие. Коэн Стюарт и др. рассмотрели гели, реагирующие на раздражители, основанные на самосборке наноразмерных структур и материалов 149 . Коувер и др. представили термочувствительные полиизоцианопептидные гидрогелевые сети, которые имитируют белки цитоскелета 150 . На основе взаимопроникающих полимерных сетей были разработаны проводящие чувствительные гидрогели для создания искусственных гидрогелевых умных мышц с сенсорными функциями 151,152 . Чжао и др. 152 продемонстрировал мягкий соматочувствительный привод с использованием взаимопроникающей полимерной двойной сетки из поли(N-изопропилакриламида) (PNIPAAm) и PANI.
Сравнение электрических и механических свойств
Типичные характеристики напряжений и деформаций различных искусственных мышц показаны на рис. 8, причем скелетная мышца также включена для справки. Кружками показаны общие диапазоны, соответствующие конкретным механизмам согласно предыдущим обзорам 1,7,103,153,154,155 и некоторым недавним исследованиям. Точки данных показывают максимальные диапазоны деформации и напряжения, указанные в соответствующих источниках: (a) SMA 1 156 157 и СМП 26 158 159 ; (b) пневматические искусственные мышцы 156,160 ; (c) DEA 1,82,83,161,162,163 ; (г) IPMC 1,4 ; (e) пьезоэлектрические искусственные мышцы 4,156,158 ; и (f) магнитомягкие искусственные мышцы 7,164,165 . Среди всех искусственных мышц пневматические искусственные мышцы охватывают самый широкий спектр приводов с низким напряжением. Это комбинированный эффект выбора материала, конструкции и источника питания. Композиты из мягкого магнита и полимера имеют такой же диапазон деформации, что и натуральные мышцы, что предполагает возможность имитации функции и морфологии скелетных мышц. SMP могут обеспечить высокое усилие срабатывания и плотность работы при относительно высоком напряжении. Хотя SMA обладают самым высоким модулем упругости как материалы, они все еще применяются в некоторых мягких приводах с конструкцией конструкции с низкой жесткостью 41 .
Рис. 8: Типичные характеристики напряжения и деформации искусственных мышц.
These artificial muscles include SMAs 1,156,157 and SMPs 26,158,159 , pneumatic artificial muscles 156,160 , DEAs 1,82,83,161,162,163 , IPMCs 1,4 , piezoelectric artificial muscles 4,156,158 , soft magnetic artificial muscles 7 164 165
Изображение с полным размером
Среди трех видов ЭАП искусственные мышцы DE имеют самые высокие уровни максимальной деформации, в то время как IPMC имеют более высокий модуль упругости, чем DE, что позволяет предположить, что IPMC могут создавать более высокие усилия при одинаковом усилии срабатывания . Пьезоэлектрические материалы, особенно пьезоэлектрическая керамика, такая как PZT, имеют самые высокие напряжения, но самые низкие деформации среди EAP. Это делает пьезоэлектрические актуаторы подходящими для создания тонких движений в конструкциях с высоким механическим импедансом. Для пьезоэлектрических приводов требуется метод усиления собственного движения для достижения большего диапазона движения, как обсуждалось ранее.
В таблице 1 представлено дальнейшее сравнение параметров различных механизмов, включая диапазон максимальных деформаций при срабатывании, модули упругости, плотность работы, эффективность и относительные скорости 1,4,7,12,25,153,156,158 . Искусственные мышцы на основе органических материалов, как и естественные скелетные мышцы, имеют высокую деформацию при срабатывании и низкий модуль упругости, в то время как мышцы, содержащие металлические или керамические компоненты, обычно имеют высокий модуль упругости. Для термочувствительных материалов с памятью формы рабочие плотности являются привлекательными; однако проблемы ограниченной скорости и низкой эффективности необходимо изучить и улучшить. Пневматические мягкие приводы обеспечивают среднее напряжение и скорость, как у скелетных мышц, а эффективность варьируется 23 160 166 . Электрические приводы, такие как ДЭ и пьезоэлектрические искусственные мышцы, обладают высоким КПД, что существенно для автономной системы с ограниченным энергоснабжением. Кроме того, ЭЭ и пьезоэлектрические искусственные мышцы имеют высокие скорости отклика; поэтому их можно использовать в приложениях, требующих высокочастотного срабатывания, таких как воздушные роботы с машущими крыльями 16,128 . Скорость IPMC относительно низкая, но их низкое рабочее напряжение позволяет приложениям, которые не выдерживают высокого напряжения, необходимого для DE и пьезоэлектрической искусственной мышцы. Магнитомягкие композиты имеют средний уровень деформации, рабочую плотность и скорость. Заявленная плотность работы привода миллиметрового масштаба 167 была относительно низкой, порядка 10 -2 кДж м -3 , что говорит о том, что плотность работы магнитомягких приводов может быть ограничена в небольших масштабах. На сегодняшний день только ограниченное количество исследований показало эффективность магнитных мягких приводов. Пространственное распределение магнитного поля может привести к относительно низкой эффективности; однако он позволяет питать и управлять магнитными искусственными мышцами без проводов.
Таблица 1 Типичные характеристики различных искусственных мышц 1,4,7,12,25,153,156,158
Полноразмерный стол
Применение искусственных мышц
Большое количество приложений в различных областях было разработано с использованием разнообразия искусственных мышц. При выборе исполнительного механизма следует всесторонне учитывать характеристики материала и исполнительные характеристики, такие как модуль упругости, прочность, источник энергии, эффективность и время отклика. Здесь мы обсудим адаптируемость некоторых искусственных мышц к конкретным приложениям в соответствии с требованиями приложения и свойствами приводных механизмов.
Как показано в Таблице 2, микромягкие пловцы работают в жидких средах, таких как вода и кровь, и поэтому требуют дополнительных водонепроницаемых свойств, особенно для электроактивных материалов. Для отвязанных микропловцов, работающих в человеческом теле, предпочтительным является магнитное срабатывание 130,137 , которое позволяет одновременно осуществлять беспроводное управление и передачу энергии. Гидравлические приводы могут быть рассмотрены для микропловцов, чтобы потенциально использовать окружающую жидкость, в то время как разработать источники микродавления для микропловцов без привязи сложно. Низковольтные ИПМК с гидрогелевыми материалами также могут работать в воде; однако рабочее напряжение должно быть ниже напряжения разложения воды.
Таблица 2 Предпочтительные искусственные мышцы для некоторых типовых микросистемных применений
Полноразмерный стол
Мягкие микроприводы для инвазивной хирургии нуждаются в возможности точного движения, а сила также должна точно контролироваться 168,169 . Для микрохирургии мягкие искусственные мышцы могут обеспечить дополнительную гибкость и толерантность во время инвазивного лечения. В соответствии с требуемыми свойствами к потенциальным механизмам относятся пьезоэлектрические, магнитные, пневматические и IPMC-приведения в действие. Пьезоэлектрический 127 и магнитными приводами 170 можно манипулировать с высокой точностью и скоростью. Пневматические искусственные мышцы обладают отличной силой и способностью двигаться и используются в микрохирургии 171 . Однако время отклика относительно велико, и при некоторых микрохирургических операциях следует принимать во внимание меры предосторожности в отношении утечки газа. Кроме того, IPMC с низким рабочим напряжением представляют собой безопасный вариант, но для IPMC по-прежнему сложно обеспечить точное движение по сравнению с пьезоэлектрическим приводом.
Летающие микророботы обычно нуждаются в высокочастотном срабатывании до нескольких сотен герц, что является сложной задачей для многих искусственных мышц. Для привода крыльев микролетающих роботов использовались пьезоэлектрические материалы 17 и DEA 16 из-за короткого времени отклика и приемлемой создаваемой силы. Кроме того, актуаторы micro SMA потенциально могут использоваться в этом приложении, учитывая, что они продемонстрировали способность работать на частотах выше 1 кГц 44 , а создаваемая сила относительно высока. Поскольку большинство SMA демонстрируют односторонний эффект памяти формы, для обеспечения периодического движения необходим правильный структурный дизайн.
Микронасосы могут использоваться в микрожидкостных устройствах. Ход должен быть большим, чтобы максимизировать управляемость, а время отклика должно быть небольшим, чтобы обеспечить быстрое управление потоками жидкости. Водонепроницаемая искусственная мышца предлагается с учетом прочности. Пневматические приводы 172 могут генерировать большую деформацию и относительно высокое усилие, а пьезоэлектрические приводы 107 обеспечивают точное управление прецизионными микронасосами. IPMC способны генерировать относительно большие удары, а низкое рабочее напряжение повышает безопасность 173 174 . Перспективны магнитные микронасосы с гибкой беспроводной передачей энергии и управлением; однако производимая сила и мощность могут быстро снижаться на микроуровне с учетом закона масштабирования 13 .
Как обсуждалось в предыдущих разделах, в мягких захватах можно использовать множество механизмов; здесь мы приводим несколько примеров. Хотя требования к мягким захватам варьируются в зависимости от конкретных свойств объектов и окружающей среды, таких как твердость материалов, химические компоненты и температура окружающей среды, наиболее основным и общим требованием к мягким захватам как исполнительным механизмам является точное управление усилием. и инсульт. Пневматические искусственные мышцы наиболее широко используются для этой цели, и многие исследования продемонстрировали их выдающиеся характеристики. Кроме того, мягкие ИПМК могут обеспечить большой ход при низком напряжении, а пленочные конструкции ИПМК требуют меньше места в микросистемах, чем пневматические искусственные мышцы. Тем не менее, относительно низкая точность и низкая скорость отклика считаются ограничениями для применения IPMC.
Искусственные экзоскелеты насекомых могут обеспечить движущую силу для роботов размером с насекомое, для которых требуются приводы с высокой плотностью энергии, большим ходом и быстрым откликом. Пьезоэлектрические полимеры 119, 120 и IPMC 98 оказались подходящими для этого применения. Дополнительным преимуществом пьезоэлектрических искусственных мышц является высокая эффективность преобразования энергии, что позволяет увеличить срок службы автономных роботов-насекомых, питающихся от аккумуляторов. Микропневматические приводы перспективны и выиграют от исследований пневматических механизмов для макророботов. Основной задачей является миниатюризация эффективных насосов. DE могут обеспечить мощное срабатывание и быструю реакцию для роботов-насекомых, хотя высокое рабочее напряжение требует относительно сложной бортовой схемы 175 .
Кроме того, при проектировании малогабаритных устройств следует учитывать законы масштабирования различных искусственных мышц. Как правило, сила срабатывания и энергия зависят от характерной длины 176,177 . Диллер и др. предоставили подробный анализ по этому вопросу 176 . Когда масштаб меньше 1 мкм, отношение площади поверхности к объему микропривода становится высоким, и влияние площади поверхности становится критическим. Нельзя пренебрегать силами вязкости, трением и адгезией, и их можно использовать для приведения в действие микроприводов 12 .
Доставка, хранение и преобразование энергии в микросистемах
Основной функцией исполнительной микросистемы является преобразование энергии в различных формах в механическую энергию с необходимой силой и движением. Поэтому в этом контексте стоит рассмотреть наиболее эффективные стратегии управления энергопотреблением (включая доставку, хранение и преобразование энергии). Стремление к автономии особенно важно и сложно для микросистем. Мягкие роботы — типичные автономные системы, приводимые в действие искусственными мышцами. Согласно определению Раса и Толли, основным свойством мягких роботов как систем является их способность к автономному поведению 66 . Для автономных микросистем предпочтительна независимая подача энергии с локальным хранилищем или без него. В этом разделе мы сосредоточимся на вопросах энергетики, в основном обсуждая возможности разработки энергоавтономных систем микророботов путем внедрения многоступенчатого распределенного управления энергией и срабатыванием.
Парадигму автономных микросистем с управлением энергопотреблением и срабатыванием можно резюмировать, как показано на рис. 9. Стратегия управления энергопотреблением включает в себя хранение и доставку энергии, тогда как управление срабатыванием включает в себя централизованное генерирование и доставку срабатывания. Блок-схема рис. 9можно рассматривать как набор инструментов, содержащий элементы, которые можно повторять и комбинировать в различных архитектурах в соответствии с потребностями системы. В следующих параграфах мы обсудим соответствующие детали этих двух аспектов.
Рис. 9: Парадигма автономных микросистем с улучшенным управлением питанием и активацией.
Независимые источники питания и надлежащее локальное хранение энергии могут помочь микросистемам реализовать долгосрочную автономность энергии. Для микросистем с несколькими рабочими органами централизованное приведение в действие имеет потенциал для улучшения возможностей приведения в действие и эффективности при минимизации структурной сложности и сложности изготовления
Изображение полного размера
Доставка и хранение энергии
Биологическим примером доставки и хранения энергии в автономной системе является пищеварительная система человека и система кровообращения. Мышцы в человеческом теле потребляют энергию все время, но людям нужно есть только два или три раза в день или меньше, чтобы удовлетворить суточную потребность в энергии. Энергия, содержащаяся в пище, поступает в организм человека интенсивно за короткое время, после чего организм использует несколько стадий накопления и преобразования энергии в качестве «буферов», чтобы сделать выделение энергии тканям медленным и плавным. Существование таких энергетических буферов, как желудок, печень и жировая ткань, дает людям исключительную свободу работать и играть, а не тратить все время на еду. Вышеупомянутый механизм реализует доставку энергии из окружающей среды в организм человека и хранение энергии в организме. После этого кровь в системе кровообращения переносит питательные вещества и другие необходимые вещества (такие как глюкоза и кислород) по всему телу. Для мышечных клеток кровь обеспечивает как питание, так и энергию, например глюкозу, проходя через сосуды по всему телу, чтобы поддерживать их основные функции и обеспечивать их движение под контролем нервной системы. Местное накопление химической энергии в мышцах позволяет быстро преобразовать ее в механическое усилие, когда требуется более высокая выходная мощность, чем может быть обеспечена скоростью доставки энергии кровью.
Этот биологический механизм вдохновляет на разработку автономных роботизированных систем. Сигналы питания и управления могут подаваться к корпусу робота привязанным образом; однако это привязанное соединение ограничивает гибкость робота. Это особенно проблематично, когда поведение робота сложное (например, полет) или когда количество роботов становится большим (например, рои роботов). Кроме того, низкое энергопотребление микроактюатора позволяет выбирать отвязанные источники питания с ограниченной удельной мощностью. Следовательно, правильное локальное хранение и управление энергией, как показано на рис. 9, может координировать высвобождение энергии по требованию исполнительных механизмов в системе во времени и пространстве. Перезаряжаемые батареи являются наиболее часто используемыми накопителями энергии общего назначения, в то время как суперконденсаторы хорошо подходят для приложений, требующих высокой мощности в течение короткого времени. Комбинируя одно или несколько из этих устройств хранения с существующей технологией беспроводной передачи энергии 178,179,180 , система микророботов может реализовать долгосрочную автономность энергии. На сегодняшний день менее изучен широкий спектр вариантов централизованного, распределенного или локального хранения энергии. По мере того, как роботизированные микросистемы становятся все более сложными, это пространство проектирования может быть изучено, чтобы максимизировать производительность в рамках ограничений пространства, операционной среды и функциональных требований.
В дополнение к активной подаче энергии сбор энергии может помочь путем преобразования энергии окружающей среды 181,182 в электроэнергию, например, солнечные элементы 183,184 , сборщики энергии вибрации 185 , растягиваемые ректенны для сбора радиочастотной энергии 186 9013 биотопливо ячейки 187 , растягиваемые трибоэлектрические и пьезоэлектрические наногенераторы 114,188,189 . За последние два десятилетия крупные достижения в области сбора энергии позволили появиться различным энергонезависимым устройствам с питанием. Микроэнергетические комбайны могут быть интегрированы в маломощные микроприводы или системы. Предоставление локального хранилища обычно необходимо в таких системах для обеспечения требуемого буфера энергии, когда спрос не совпадает с наличием предложения. Таким образом, микросистемы могут стать полностью энергонезависимыми в будущем.
Централизованное срабатывание и подача срабатывания
Во многих сценариях, таких как инвазивная роботизированная хирургия, мы можем обнаружить, что для выполнения задачи может потребоваться несколько совместных концевых эффекторов. Традиционно в этих случаях для каждого рабочего органа назначаются независимые приводные компоненты. Для макро- или мезомасштабных роботов и приводов эта архитектура обеспечивает хорошую гибкость для манипулирования. Однако это вызывает дополнительные трудности, когда система масштабируется до микромасштаба. Если для каждого из микроприводов требуются независимые силовые и исполнительные механизмы, то сложность проектирования и изготовления системы значительно возрастет.
Перспективной альтернативной архитектурой является централизованное многоступенчатое срабатывание. В этой архитектуре приведение в действие, необходимое для концевых зажимов, может генерироваться одним мощным центральным преобразователем, как показано на рис. 9. Приведение в действие может передаваться каждому конечному зажиму на следующем этапе с помощью надлежащего механизма передачи (например, гидравлические, пневматические или механические связи, такие как сухожилия), поэтому в эти концевые зажимы не нужно встраивать дополнительный исполнительный преобразователь. Благодаря централизованному управлению масштаб, структурная сложность и трудоемкость изготовления могут быть сведены к минимуму. Более того, поскольку центральный привод можно разместить за пределами узкого рабочего пространства, его можно спроектировать с большей свободой. По сравнению с ограниченным масштабом привода на концевом зажиме, централизованное приведение в действие может улучшить максимальную способность приведения в действие в соответствии с конкретными требованиями, тем самым повышая производительность микросистемы. Здесь также вдохновляют макромасштабные роботизированные системы. В макромасштабных системах централизованная трансдукция также позволяет использовать сложные высокоэффективные устройства (такие как гидравлические насосы), избегая при этом ограничений по размеру и стоимости или нескольких локальных преобразователей.
Например, микроприводы с несколькими степенями свободы в микрохирургии обычно приводятся в действие несколькими локальными приводами; каждый привод нуждается в питании и управлении. Это затрудняет уменьшение масштаба микроприводов. Кроме того, это может быть небезопасно, учитывая высокое управляющее напряжение пьезоэлектрических приводов или риск утечки газа пневматических приводов. В этом случае можно использовать центральный привод для срабатывания, а подходящий механизм передачи срабатывания (например, гидравлическую или рычажную систему) можно использовать для регулировки и передачи требуемого срабатывания на один или несколько датчиков на конце. Для этой архитектуры основные ограничения включают прочность материала и конструкцию механизмов передачи срабатывания, а также ограничения скорости и артефакты, такие как люфт.
Выводы
Исследования искусственных мышц представляют собой быстро развивающуюся область. Эти исследования предлагают инновационные подходы к созданию срабатывания с использованием мягких материалов с превосходной податливостью. Здесь мы обсудили недавний прогресс в исследованиях искусственных мышц с использованием различных приводных механизмов, включая материалы с памятью формы, пневматические и гидравлические микроприводы, ДЭ, ионные искусственные мышцы, пьезоэлектрические микроприводы и микромагнитные искусственные мышцы.
У каждого механизма есть свои плюсы и минусы, поэтому он подходит для разных целей. Мы обсудили предпочтительные приводные механизмы для некоторых типичных приложений. Уровни выходной мощности искусственных мышц улучшались в последнее десятилетие. Некоторые передовые искусственные мышцы уже показали конкурентоспособную удельную мощность по сравнению с естественными скелетными мышцами, но эффективность большинства механизмов остается на низком уровне, за исключением пьезоэлектрического механизма. Длительное время отклика из-за вязкоупругости полимеров ограничивает их использование в приложениях, требующих высокочастотного движения. Хотя для решения этой проблемы были проведены некоторые исследования, она все еще остается сложной, особенно для SMP и ионных искусственных мышц.
Мы представляем многоступенчатую парадигму управления энергопотреблением и активацией для энергонезависимых микросистем. Гибкая подача энергии и локальное хранение энергии перспективны для повышения надежности и качества энергоснабжения и могут способствовать энергетической автономности микросистемы. Централизованное генерирование срабатывания потенциально может повысить общую энергоэффективность и упростить конструкцию концевых эффекторов в микросистемах. Для передачи срабатывания между центральным приводом и концевыми эффекторами можно рассмотреть несколько стратегий доставки срабатывания. Несмотря на исследовательский характер, это исследование дает некоторое представление об управлении энергией и срабатыванием для будущих исследований и практики.
Искусственные мышцы конкурентоспособны для замены обычных приводов в областях, требующих сильного взаимодействия человека и машины и сильной адаптации к окружающей среде. В будущем будет привлекательно использовать эту технологию для тестирования и лечения in vivo, доставки лекарств, микроманипуляций с биоматериалами и помощи людям с ограниченными физическими возможностями. Сочетая искусственные мышцы с быстро развивающейся электронной кожей, алгоритмами искусственного интеллекта и беспроводной передачей энергии, он обещает реализовать автономию во многих вдохновляющих задачах, таких как помощь в реабилитации и групповой интеллект микророботов в сложных условиях.
Ссылки
Madden, J.D.W. et al. Технология искусственных мышц: физические принципы и военно-морские перспективы. IEEE Дж. Оушен. англ. 29 , 706–728 (2004).
Google ученый
Барретт К.Е., Барман С.М., Брукс Х.Л. и Юань Дж.С.-Дж. Возбудимые ткани: мышцы. в Ganong’s Review of Medical Physiology , 26e (McGraw-Hill Education LLC., 2019).
Уайтсайдс, Г. М. Мягкая робототехника. Анжю. хим. Междунар. Эд. 57 , 4258–4273 (2018).
Google ученый
Дудута М., Хаджисмайли Э., Чжао Х., Вуд Р. Дж. и Кларк Д. Р. Реализация потенциала искусственных мышц из диэлектрического эластомера. Проц. Натл акад. науч. США 116 , 2476–2481 (2019).
Google ученый
Haines, C. S. et al. Искусственные мышцы из лески и швейных ниток. Наука 343 , 868–872 (2014).
Google ученый
Нгуен, В. К., Ахмед, А. С. и Рамануджан, Р. В. Морфинг магнитомягких композитов. Доп. Матер. 24 , 4041–4054 (2012).
Google ученый
Маджиди, К. Инженерия мягких материалов для мягкой робототехники.
Доп. Матер. Технол. 4 , 1800477 (2018).Google ученый
Qiu, Y., Zhang, E., Plamthottam, R. & Pei, Q. Искусственная мышца из диэлектрического эластомера: инновации в области материалов и исследования устройств. Согл. хим. Рез. 52 , 316–325 (2019).
Google ученый
Де Лука, В. и др. Ионные электроактивные полимерно-металлические композиты: изготовление, моделирование и применение посткремниевых интеллектуальных устройств. Дж. Полим. науч. Часть Б Полим. физ. 51 , 699–734 (2013).
Google ученый
Гупта, В., Шарма, М. и Такур, Н. Критерии оптимизации для оптимального размещения пьезоэлектрических датчиков и приводов в интеллектуальной конструкции: технический обзор. Дж. Интел. Матер. Сист. Структура 21 , 1227–1243 (2010).
Google ученый
Behl, M., Razzaq, M.Y. & Lendlein, A. Многофункциональные полимеры с памятью формы. Доп. Матер. 22 , 3388–3410 (2010).
Google ученый
Хайнс Л., Петерсен К., Лам Г.З. и Ситти М. Мягкие приводы для малой робототехники. Доп. Матер. 29 , 1603483 (2017).
Google ученый
Мирвакили С. М. и Хантер И. В. Разнонаправленные искусственные мышцы из нейлона. Доп. Матер. 29 , 1–7 (2017).
Google ученый
Pelrine, R., Kornbluh, R., Pei, Q. & Joseph, J. Высокоскоростные электрические эластомеры с деформацией более 100%. Наука 287 , 836–839 (2000).
Google ученый
Ма, К.Ю., Чирараттананон, П., Фуллер, С.Б. и Вуд, Р.Дж. Управляемый полет биологически вдохновленного робота размером с насекомое. Наука 340 , 603–607 (2013).
Google ученый
Lee, D.W. et al. Магнитное крутильное срабатывание искусственной мышцы из нити из углеродных нанотрубок. RSC Adv. 8 , 17421–17425 (2018).
Google ученый
Чон, С. и др. Мягкий микроробот с магнитным управлением управляет проводником в трехмерной фантомной сосудистой сети. Мягкий робот. 6 , 54–68 (2019).
Google ученый
Lima, M.D. et al. Электрическое, химическое и фотонное приведение в действие кручения и растяжения мускулов из гибридной нити из углеродных нанотрубок. Наука 338 , 928–932 (2012).
Google ученый
Венер, М. и др. Интегрированная стратегия проектирования и производства полностью мягких автономных роботов. Природа 536 , 451–455 (2016).
Google ученый
Айнла, А., Верма, М.С., Ян, Д. и Уайтсайдс, Г.М. Мягкий вращающийся пневматический привод. Мягкий робот. 4 , 297–304 (2017).
Google ученый
Mu, J. et al. Искусственные мышцы с оболочкой. Наука 365 , 150–155 (2019).
Google ученый
Lendlein, A. & Gould, O.E.C. Перепрограммируемое восстановление и срабатывание полимеров с памятью формы. Нац. Преподобный Матер. 4 , 116–133 (2019).
Google ученый
Се Т. Перестраиваемый полимерный эффект памяти нескольких форм. Природа 464 , 267–270 (2010).
Google ученый
Мохд Джани, Дж., Лири, М., Субик, А. и Гибсон, М.А. Обзор исследований, применений и возможностей сплавов с памятью формы. Матер. Дес. 56 , 1078–1113 (2014).
Google ученый
Суэйн, М. В. Поведение с памятью формы в частично стабилизированной керамике из диоксида циркония. Природа 322 , 234–236 (1986).
Google ученый
Lai, A., Du, Z., Gan, C.L. & Schuh, C.A. Память формы и сверхэластичная керамика в малых масштабах. Наука 341 , 1505–1508 (2013).
Google ученый
Lendlein, A. & Kelch, S. Полимеры с памятью формы. Анжю. хим. Междунар. Эд. 41 , 2034 (2002).
Google ученый
Meng, H. & Li, G.
Обзор чувствительных к воздействиям полимерных композитов с памятью формы. Полимер 54 , 2199–2221 (2013).Google ученый
Оландер А. А. Н. Электрохимическое исследование твердых сплавов кадмия и золота. Дж. Ам. хим. соц. 54 , 3819–3833 (1932).
Google ученый
Кауфман, Г. Б. и Мэйо, И. История нитинола: счастливое открытие металла памяти и его применения. Хим. Образовательный 2 , 1–21 (1997).
Google ученый
Сун, Л. и Хуанг, В. М. Природа многостадийного превращения в сплавах с памятью формы при нагреве. Мет. науч. Нагревать. Удовольствие. 51 , 573–578 (2009).
Google ученый
An, L., Huang, W.
M., Fu, Y.Q. и Guo, N.Q. Примечание о размерном эффекте при приведении в действие сплавов NiTi с памятью формы электрическим током. Матер. Дес. 29 , 1432–1437 (2008).Google ученый
Ю Л. и др. Эффекты памяти нескольких форм в мультикомпозите, селективном по длине волны. Дж. Матер. хим. А 3 , 13953–13961 (2015).
Google ученый
Luo, X. & Mather, PT Полимерные композиты тройной формы (TSPC). Доп. Функц. Матер. 20 , 2649–2656 (2010).
Google ученый
Behl, M., Kratz, K., Zotzmann, J., Nöchel, U. & Lendlein, A. Обратимые двунаправленные полимеры с памятью формы. Доп. Матер. 25 , 4466–4469 (2013).
Google ученый
Huang, X. et al. В погоне за биомиметическими скоростями передвижения: создание неуправляемых мягких роботов с приводами из сплава с памятью формы. науч. Робот. 3 , eaau7557 (2018).
Google ученый
Xiao, R. & Huang, W. M. Полимеры с памятью формы, реагирующие на нагревание/растворитель, для имплантатов биомедицинских устройств в минимально инвазивной хирургии: текущее состояние и проблемы. Макромоль. Бионауч. 20 , 2000108 (2020).
Google ученый
Ким, С. и др. Микроискусственное мышечное волокно с использованием пружины NiTi для мягкой робототехники.
в 2009 г. Международная конференция IEEE / RSJ по интеллектуальным роботам и системам 2228–2234 (IEEE, 2009 г.). https://doi.org/10.1109/IROS.2009.5354178.Ли, Х.-Т., Ким, М.-С., Ли, Г.-Ю., Ким, К.-С. и Ан, С.-Х. Микроприводы на основе сплава с памятью формы (SMA) со степенью деформации 60% и скоростью срабатывания 1,6 кГц. Малый 14 , 1801023 (2018).
Google ученый
Сюй, Х. и др. Деформируемая, программируемая и запоминающая форму микрооптика. Доп. Функц. Матер. 23 , 3299–3306 (2013).
Google ученый
Zhang, W. et al. Структурные многоцветные невидимые чернила с субмикронной 4D-печатью полимеров с памятью формы. Нац. коммун. 12 , 112 (2021).
Google ученый
Felton, S.
M. et al. Самоскладывающиеся композиты с памятью формы. Мягкая материя 9 , 7688–7694 (2013).Google ученый
Чжао, К., Цзоу, В., Луо, Ю. и Се, Т. Полимерная сеть с памятью формы с термически отличной эластичностью и пластичностью. науч. Доп. 2 , e1501297 (2016).
Google ученый
Zhang, Y. et al. Вьющиеся электроды, вдохновленные скалолазанием, использующие память формы для стимуляции и записи периферических нервов. науч. Доп. 5 , eaaw1066 https://doi.org/10.1126/sciadv.aaw1066 (2019).
Джин, Б. и др. Программирование кристаллической полимерной сети с памятью формы с термо- и фотообратимыми связями для создания однокомпонентного мягкого робота. Науч. Доп. 4 , eaao3865 (2018).
Google ученый
Zhang, Y. et al. 4D-печать цифрового полимера с памятью формы с настраиваемой высокой производительностью. Приложение ACS Матер. Интерфейсы 11 , 32408–32413 (2019).
Google ученый
Ze, Q. et al. Полимеры с магнитной памятью формы со встроенным многофункциональным манипулированием формой. Доп. Матер. 32 , 1–8 (2020).
Google ученый
Гуревич, И. и Сильверштейн, М.С. Полимерные пены с памятью формы из эмульсионных шаблонов. Мягкая материя 8 , 10378 (2012).
Google ученый
Хейдаршенас, М., Кокаби, М. и Хоссейни, Х. Электропроводящие нанокомпозитные аэрогели ПВС/МУНТ с памятью формы. Полим. J. 51 , 579–590 (2019).
Google ученый
Ю, К., Лю, Ю. и Ленг, Дж. Композиты полимер/УНТ с памятью формы и их поведение с памятью формы, индуцированное микроволновым излучением. RSC Adv. 4 , 2961–2968 (2014).
Google ученый
Юань, Дж. и др. Нанокомпозитные волокна с памятью формы для непривязанных высокоэнергетических микродвигателей. Наука 365 , 155–158 (2019).
Google ученый
Пэк, Дж., Чо, И. и Ким, Дж. Микророботизированные щупальца с возможностью сгибания по спирали на основе эластомерных микротрубок специальной формы. Науч. Респ. 5 , 10768 (2015).
Google ученый
Скайлар-Скотт, М. А., Мюллер, Дж., Виссер, К. В. и Льюис, Дж. А. Мягкая материя с вокселированием с помощью многокомпонентной 3D-печати с несколькими соплами. Природа 575 , 330–335 (2019).
Google ученый
Ge, L., Dong, L., Wang, D., Ge, Q. & Gu, G. Цифровой световой 3D-принтер для быстрого и высокоточного изготовления мягких пневматических приводов.
Приводы датчиков A Физ. 273 , 285–292 (2018).Google ученый
Амири Могхадам, А. А. и др. Лазерная резка как быстрый метод изготовления тонких мягких пневматических приводов и роботов. Мягкий робот. 5 , 443–451 (2018).
Google ученый
Гориссен, Б., Ван Хоф, К., Рейнартс, Д. и Де Волдер, М. Травильная маска SU8 для формирования рисунка PDMS и ее применение в гибких жидкостных микроактуаторах. Микросист. Наноенг. 2 , 16045 (2016).
Google ученый
Де Волдер, М. и Рейнартс, Д. Пневматические и гидравлические микроприводы: обзор. Дж. Микромех. Микроангл. 20 , 043001 (2010).
Google ученый
Рус Д.
и Толли М. Т. Проектирование, изготовление и управление мягкими роботами. Природа 521 , 467–475 (2015).Google ученый
Венер, М. и др. Пневматические источники энергии для автономной и носимой мягкой робототехники. Мягкий робот. 1 , 263–274 (2014).
Google ученый
Панг, К., Тай, Ю.-К., Бердик, Дж. В. и Андерсен, Р. Мембранные приводы на основе электролиза. Нанотехнологии 17 , S64–S68 (2006).
Google ученый
Венер, М. и др. Интегрированная стратегия проектирования и производства полностью мягких автономных роботов. Природа 536 , 451–455 (2016).
Google ученый
Гориссен, Б. и др. Гибкие пневматические поворотные приводы и их применение в поворотных микрозеркалах.
Сенсорные приводы A Физ. 216 , 426–431 (2014).Google ученый
Хоукс, Э. В., Блюменшайн, Л. Х., Грир, Дж. Д. и Окамура, А. М. Мягкий робот, который ориентируется в окружающей среде за счет роста. науч. Робот. 2 , eaan3028 (2017).
Google ученый
Блюменшайн, Л. Х., Ган, Л. Т., Фан, Дж. А., Окамура, А. М. и Хоукс, Э. В. Мягкий робот с выдвижным наконечником позволяет реконфигурировать и развертывать антенны. Робот IEEE. автомат. лат. 3 , 949–956 (2018).
Google ученый
Мирвакили С. М., Сим Д., Хантер И. В. и Лангер Р. Приведение в действие отвязанных пневматических искусственных мышц и мягких роботов с использованием магнитно-индуцированных фазовых переходов жидкость-газ. науч. Робот. 5 , eaaz4239 (2020).
Google ученый
Song, S. & Sitti, M. Мягкие захваты с использованием микрофибриллярных клеев для трансферной печати. Доп. Матер. 26 , 4901–4906 (2014).
Google ученый
Кониши С., Шимомура С., Тадзима С. и Табата Ю. Внедрение мягких микропальцев для системы манипулирования агрегатами hMSC. Микросист. Наноенг. 2 , 15048 (2016).
Google ученый
Дитесават Р.С., Хелпс Т., Тагави М. и Росситер Дж. Электропневматические насосы для мягкой робототехники. Науч. Робот. 6 , eabc3721 (2021).
Google ученый
Брошу, П. и Пей, К. Достижения в области диэлектрических эластомеров для приводов и искусственных мышц. Макромоль.
Быстрое общение. 31 , 10–36 (2010).Google ученый
Андерсон И. А., Гисби Т. А., Маккей Т. Г., О’Брайен Б. М. и Калиус Э. П. Многофункциональные искусственные мышцы из диэлектрического эластомера для мягких и умных машин. J. Appl. физ. 112 , 041101 (2012).
Планте, Ж.-С. и Дубовски, С. О свойствах исполнительных механизмов из диэлектрических эластомеров и их последствиях для конструкции. Умный мастер. Структура 16 , С227–С236 (2007).
Google ученый
Zhang, H. et al. Взаимопроникающие полимерные сетки на основе акриловых эластомеров и пластификаторов с улучшенным диапазоном температур срабатывания. Полим. Междунар. 59 , 384–390 (2010).
Google ученый
Hu, W., Zhang, S.N., Niu, X., Liu, C. & Pei, Q. Нанокомпозит наночастиц алюминия и акрилата в качестве диэлектрического эластомера с высокой диэлектрической проницаемостью. Дж. Матер. хим. C 2 , 1658 (2014).
Google ученый
Молберг, М. и др. Приводы из диэлектрического эластомера с высоким полем пробоя, использующие инкапсулированный полианилин в качестве наполнителя с высокой диэлектрической проницаемостью. Доп. Функц. Матер. 20 , 3280–3291 (2010).
Google ученый
Мэдсен Ф. Б., Ю Л. и Сков А. Л. Самовосстанавливающийся силиконовый диэлектрический эластомер с высокой диэлектрической проницаемостью. Макрос ACS Letter. 5 , 1196–1200 (2016).
Google ученый
Duan, L., Lai, J.C., Li, C.H. & Zuo, J.L. Привод из диэлектрического эластомера, способный полностью самовосстанавливаться. Приложение ACS Матер. Интерфейсы 12 , 44137–44146 (2020 г.).
Google ученый
Ji, X. et al. Автономное непривязанное быстрое мягкое роботизированное насекомое, приводимое в движение низковольтными приводами из диэлектрического эластомера. науч.
Робот. 4 , eaaz6451 (2019).Google ученый
Шахинпур, М. и Ким, К. Дж. Ионные композиты полимер-металл: I. Основы. Умный Матер. Структура 10 , 819–833 (2001).
Google ученый
Бахрамзаде Ю. и Шахинпур М. Обзор ионно-полимерных мягких приводов и датчиков. Мягкий робот. 1 , 38–52 (2014).
Google ученый
Конг Л. и Чен В. Углеродные нанотрубки и биоинспирированные электрохимические приводы на основе графена. Доп. Матер. 26 , 1025–1043 (2014).
Google ученый
Lu, L. & Chen, W. Биосовместимый композитный привод: надмолекулярная структура, состоящая из биополимера хитозана, углеродных нанотрубок и ионной жидкости.
Доп. Матер. 22 , 3745–3748 (2010).Google ученый
Лу, Л. и др. Высокостабильный биморфный привод, работающий на воздухе, на основе гибридного электрода из графенового нанолиста/углеродной нанотрубки. Доп. Матер. 24 , 4317–4321 (2012).
Google ученый
Мазиз А. и др. Вязание и плетение искусственных мышц. науч. Доп. 3 , 1–12 (2017).
Google ученый
Ким, О., Ким, Х., Чой, У. Х. и Парк, М. Дж. Сверхбыстрые полимерные приводы с одновольтовым приводом на основе одноионных проводников. Нац. коммун. 7 , 13576 (2016).
Google ученый
Умрао, С. и др. Искусственные мышцы MXene на основе ионно-сшитого электрода Ti3C2Tx для кинетической мягкой робототехники.
науч. Робот. 4 , 1–12 (2019).Google ученый
Лу, К. и др. Высокопроизводительные электрохимические актуаторы на основе графдиина. Нац. коммун. 9 , 1–11 (2018).
Google ученый
млн лет, С. и др. Высокоэффективный ионно-полимерно-металлический композит: к быстродействующим искусственным мышцам с большой деформацией. Доп. Функц. Матер. 30 , 18 (2020).
Google ученый
Муст, И. и др. Ионные и емкостные искусственные мышцы для биомиметической мягкой робототехники. Доп. англ. Матер. 17 , 84–94 (2015).
Google ученый
Чен, З. Обзор роботизированной рыбы с искусственными мышцами из композита ионного полимера и металла.
Робот. Биомим. 4 , 24 (2017).Чжан Ю. С. и Хадемхоссейни А. Достижения в разработке гидрогелей. Наука 356 , eaaf3627 (2017).
Google ученый
Лю, Х., Лю, Дж., Линь, С. и Чжао, X. Гидрогелевые машины. Матер. Сегодня 36 , 102–124 (2020).
Google ученый
Ян К. и Суо З. Гидрогелевая ионотроника. Нац. Преподобный Матер. 3 , 125–142 (2018).
Google ученый
Мирфахрай Т., Мэдден Дж. Д. У. и Боуман Р. Х. Полимерные искусственные мышцы. Матер. Сегодня 10 , 30–38 (2007).
Google ученый
Michael, A. & Kwok, C.Y. Пьезоэлектрический микролинзовый привод.
Сенсорные приводы A Физ. 236 , 116–129 (2015).Google ученый
Xu, W. & Wu, Y. Пьезоэлектрический привод для обработки макро- и микроцилиндрических компонентов с помощью прецизионного управления вращательным движением. мех. Сист. Сигнальный процесс. 114 , 439–447 (2019).
Google ученый
Chen, W. et al. Разработка и экспериментальная оценка нового шагового линейного пьезоэлектрического привода. Сенсорные приводы A Физ. 276 , 259–266 (2018).
Google ученый
Нгуен, Н.-Т. и Труонг, Т.-К. Полностью полимерный микронасос с пьезоэлектрическим приводом. Сенсорные приводы B Chem. 97 , 137–143 (2004).
Google ученый
DONG, S. Обзор пьезоэлектрических, ультразвуковых и магнитоэлектрических приводов. Дж. Доп. Диэлектр. 02 , 1230001 (2012).
Google ученый
Гао, X. и др. Пьезоэлектрические приводы и двигатели: материалы, конструкции и области применения. Доп. Матер. Технол. 5 , 1–26 (2020).
Google ученый
Cui, H. et al. Трехмерная печать пьезоэлектрических материалов с заданной анизотропией и направленным откликом. Нац. Матер. 18 , 234–241 (2019).
Google ученый
Zhang, Y., Peng, Y., Sun, Z. & Yu, H. Новый пьезоэлектрический привод с прерывистым скольжением на основе треугольного податливого приводного механизма. IEEE Trans. Инд. Электрон. 66 , 5374–5382 (2019).
Google ученый
Ян З., Чжоу С., Зу Дж. и Инман Д. Высокопроизводительные пьезоэлектрические преобразователи энергии и их применение. Джоуль 2 , 642–697 (2018).
Google ученый
Сафаеи, М., Содано, Х.А. и Антон, С.Р. Обзор сбора энергии с использованием пьезоэлектрических материалов: современное состояние десять лет спустя (2008–2018 гг.
). Умный Матер. Структура 28 , 113001 (2019).Google ученый
Вилла, С. М. и др. Мягкие пьезоионные/пьезоэлектрические нанокомпозиты на основе ионогеля/наночастиц BaTiO3 для низкочастотного и направленного распознавания давления. Макрос ACS Letter. 8 , 414–420 (2019).
Google ученый
Ханбаре Х. и др. Гибкие микропористые пьезоэлектрические материалы большой площади для мягкой кожи роботов. Приводы датчиков A Физ. 263 , 554–562 (2017).
Google ученый
Ши, М., Холмс, А.С. и Йейтман, Э.М. Пьезоэлектрический датчик скорости ветра, основанный на изменении частоты галопа в зависимости от силы сопротивления. Заяв. физ. лат. 116 , 264101 (2020).
Google ученый
Парк, Т. и Ча, Ю. Мягкий мобильный робот, вдохновленный бегущими движениями животных. науч. Респ. 9 , 14700 (2019).
Google ученый
Liu, Y.Z. et al. Высокоэффективный мягкий привод на основе пьезоэлектрического биморфа поливинилиденфторида. Умный мастер. Структура 28 , 055011 (2019).
Конвей, Нью-Джерси, Трейна, З.Дж. и Ким, С.-Г. Пьезоэлектрический привод MEMS с усилением деформации. Дж. Микромех. Микроангл. 17 , 781–787 (2007).
Google ученый
Вандерборхт, Б. и др. Приводы с переменным импедансом: обзор. Роб. Автон. Сист.
61 , 1601–1614 (2013).Google ученый
Наяк, С. и Рао, М. Проектирование и разработка пьезогидравлического насоса на основе пьезоэлектрического привода с усилением изгиба. Матер. Сегодня проц. https://doi.org/10.1016/j.matpr.2021.03.314 (2021).
Кизироглу, М. Э., Темелкуран, Б., Йитман, Э. М. и Ян, Г. З. Усиление микродвижений — обзор. IEEE Access 8 , 64037–64055 (2020 г.).
Google ученый
МакКлинток, Х., Темел, Ф.З., Доши, Н., Кох, Дж. и Вуд, Р.Дж. MilliDelta: широкополосный, высокоточный робот Delta миллиметрового масштаба. науч. Робот. 3 , eaar3018 (2018).
Suzuki, H. & Wood, R. J. Миниатюрный манипулятор в стиле оригами для телеуправляемой микрохирургии. Нац. Мах. Интел. 2 , 437–446 (2020).
Google ученый
Джафферис, Н. Т., Хелблинг, Э. Ф., Карпельсон, М. и Вуд, Р. Дж. Беспривязный полет микромасштабного летательного аппарата с машущими крыльями размером с насекомое. Природа 570 , 491–495 (2019).
Google ученый
Голдберг Б. и др. Автономность питания и управления для высокоскоростного передвижения с помощью робота на ногах размером с насекомое. Робот IEEE. автомат. лат. 3 , 987–993 (2018).
Google ученый
Хуанг, Х.-В. и другие. Адаптивная локомоция искусственных микропловцов. науч. Доп. 5 , eaau1532 (2019).
Google ученый
Алапан Ю., Бозуюк У., Эркоц П., Карачаколь А. К. и Ситти М. Многофункциональные поверхностные микроролики для адресной доставки грузов в физиологический кровоток.
науч. Робот. 5 , eaba5726 (2020).Google ученый
Ким Ю., Парада Г. А., Лю С. и Чжао X. Ферромагнитные мягкие континуальные роботы. науч. Робот. 4 , eaax7329 (2019).
Google ученый
Ван Дж., Гао Д. и Ли П. С. Недавний прогресс в области искусственных мышц для интерактивной мягкой робототехники. Доп. Матер. https://doi.org/10.1002/adma.202003088 (2020).
Мяо, Л. и др. Мягкие роботизированные 3D-структуры с временным намагничиванием для улучшенного сбора энергии. Доп. Матер. https://doi.org/10.1002/adma.202102691 (2021).
Дрейфус, Р. и др. Микроскопические искусственные пловцы. Природа 437 , 862–865 (2005).
Google ученый
Хуанг Х.В., Сакар М.С., Петрушка А.Дж., Пане С. и Нельсон Б.Дж. Мягкие микромашины с программируемой подвижностью и морфологией. Нац. коммун. 7 , 1–10 (2016).
Google ученый
Ren, Z., Hu, W., Dong, X. & Sitti, M. Многофункциональное мягкотелое плавание, похожее на медузу. Нац. коммун. 10, 2703 https://doi.org/10.1038/s41467-019-10549-7 (2019 г.)).
Сюй Т., Чжан Дж., Салехизаде М., Онайза О. и Диллер Э. Гибкие роботы миллиметрового масштаба с программируемой трехмерной намагниченностью и движениями. науч. Робот. 4 , eaav4494 (2019).
Google ученый
Машаехи Мазар, Ф. и др. Искусственные мышцы питаются от глюкозы. Доп. Матер. 31 , 17 (2019).
Google ученый
He, Q. et al. Электрически управляемый мягкий трубчатый привод на основе жидкокристаллического эластомера с мультимодальным срабатыванием. науч. Доп. 5 , eaax5746 (2019).
Google ученый
Hu, Y. et al. Привод с приводом от электричества и солнечного света с универсальными биомиметическими движениями на основе двухслойного композита из скрученных углеродных нанотрубок. Доп. Функц. Матер. 27 , 1704388 (2017).
Google ученый
Бисселл, Р. А., Кордова, Э., Кайфер, А. Э. и Стоддарт, Дж. Ф. Химически и электрохимически переключаемый молекулярный челнок. Природа 369 , 133–137 (1994).
Google ученый
Yang, X., Chang, L. & Pérez-Arancibia, N. O. 88-миллиграммовый автономный ползающий робот размером с насекомое, приводимый в движение каталитическим искусственным мускулом. Науч. Робот. 5 , 1–14 (2020).
Google ученый
Мискин М.З. и др. Электронно-интегрированные микроскопические роботы массового производства. Природа 584 , 557–561 (2020).
Google ученый
Лю, К. и др. Электрически программируемые приводы микрометрового размера с памятью формы для маломощных микроробототехники. науч. Робот. 6 , eabe6663 (2021).
Google ученый
Стюарт, Массачусетс. С. и др. Новые области применения полимерных материалов, реагирующих на раздражители. Нац. Матер. 9 , 101–113 (2010).
Google ученый
Kouwer, P.H.J. et al. Отзывчивые биомиметические сети из полиизоцианопептидных гидрогелей. Природа 493 , 651–655 (2013).
Google ученый
Ши, Ю., Ма, К., Пэн, Л. и Ю, Г. Проводящие «умные» гибридные гидрогели с PNIPAM и наноструктурированными проводящими полимерами. Доп.
Функц. Матер. 25 , 1219–1225 (2015).Google ученый
Zhao, Y. et al. Соматосенсорный привод на основе растяжимого проводящего фототермически чувствительного гидрогеля. науч. Робот. 6 , 1–12 (2021).
Google ученый
Рич, С. И., Вуд, Р. Дж. и Маджиди, К. Непривязанная мягкая робототехника. Нац. Электрон. 1 , 102–112 (2018).
Google ученый
Тауфик С. и Танг Ю. Более сильные искусственные мышцы с поворотом. Наука 365 , 125–126 (2019).
Google ученый
Мириев А., Стэк К. и Липсон Х. Мягкий материал для мягких приводов. Нац. коммун. 8 , 1–8 (2017).
Google ученый
Сагайян С. М., Карака Х. Э., Сури М., Тураби А. С. и Ноэбе Р. Д. Поведение высокотемпературных сплавов с памятью формы Ni50.3Ti29.7Hf20 при растяжении с памятью формы. Матер. Дес. 101 , 340–345 (2016).
Google ученый
Kornbluh, R. et al. Применение приводов EAP из диэлектрического эластомера. в электроактивных полимерных (EAP) приводах как искусственных мышцах: реальность, потенциал и проблемы, второе издание (изд. Бар-Коэн, Ю.) 529–581 (SPIE, 2004). https://doi.org/10.1117/3.547465.ch26.
Го, Дж., Ван, З., Тонг, Л., Лв, Х. и Лян, В.
Память формы и термомеханические свойства композитов полимер/углеродное волокно с памятью формы. Композ. Часть А Прил. науч. Произв. 76 , 162–171 (2015).Google ученый
Ян Д. и др. Изгибающиеся пневматические линейные приводы, вдохновленные мышцами. Доп. Матер. Технол. 1 , 1600055 (2016).
Google ученый
Racles, C., Cazacu, M., Fischer, B. & Opris, D.M. Синтез и характеристика силиконов, содержащих цианопропильные группы, и их использование в диэлектрических эластомерных приводах. Умный мастер. Структура 22 , 104004 (2013).
Пэн, З., Ши, Ю., Чен, Н., Ли, Ю. и Пей, К. Стабильные и выдерживающие большие деформации диэлектрические эластомерные приводы на основе двухслойного электрода из углеродных нанотрубок и полимера. Доп. Функц.
Матер. 31 , 2008321 (2021).Ла, Т.-Г., Лау, Г.-К., Шиау, Л.-Л. & Wei-Yee Tan, A. Мышеобразные приводы из диэлектрического эластомера с высоким напряжением и масляными капсулами. Умный мастер. Структура 23 , 105006 (2014).
Google ученый
Ji, Z., Yan, C., Yu, B., Wang, X. & Zhou, F. Мультиматериалы 3D-печать для изготовления магнитного приводного привода без сборки. Доп. Матер. Интерфейсы 4 , 1–6 (2017).
Google ученый
Zhang, J. et al. Магнитные композитные пленки на основе жидкокристаллического эластомера для реконфигурируемых мягких миниатюрных машин. Доп. Матер. 33 , 2006191 (2021).
Google ученый
Ли, Дж. Г. и Родриг, Х. Эффективность вакуумной пневматической искусственной мышцы на основе оригами для автономной работы.
Междунар. Дж. Точность. англ. Произв. Зеленый. Технол. 6 , 789–797 (2019).Google ученый
До, Т. Н., Фан, Х., Нгуен, Т. и Визелл, Ю. Миниатюрные мягкие электромагнитные приводы для робототехники. Доп. Функц. Матер. 28 , 1800244 (2018).
Google ученый
Шан, Дж. и др. Однопортовая роботизированная система для трансанальной микрохирургии — дизайн и валидация. Робот IEEE. автомат. лат. 2 , 1510–1517 (2017).
Google ученый
Чжан, Д., Чен, Дж., Ли, В., Баутиста Салинас, Д. и Ян, Г. З. Исследовательская платформа микрохирургических роботов для исследований и обучения роботизированной микрохирургии. Междунар. Дж. Вычисл. Ассистент Радиол. Surg. 15 , 15–25 (2020).
Google ученый
Барбот А., Пауэр М., Сейчепин Ф. и Ян Г.-З. Жидкостное уплотнение для компактного срабатывания микропоршня на кончике капилляра. науч. Доп. 6 , eaba5660 (2020).
Google ученый
Чи, П. С., Минджал, М. Н., Леоу, П. Л. и Али, М. С. М. Термопневматический микронасос с беспроводным питанием и частотно-регулируемым нагревателем. Сенсорные приводы A Физ. 233 , 1–8 (2015).
Google ученый
Нам, Д.Н.К. и Ан, К.К. Конструкция диафрагмы IPMC для применения в микронасосах. Сенсорные приводы A Физ. 187 , 174–182 (2012).
Google ученый
McDaid, AJ, Aw, KC, Haemmerle, E. & Xie, S.Q. Управление приводами IPMC для микрофлюидики с адаптивной итеративной настройкой обратной связи «онлайн». IEEE/ASME Trans. Мехатрон. 17 , 789–797 (2012).
Google ученый
Marette, A. et al. Гибкие тонкопленочные транзисторы на основе оксида цинка и олова, работающие при напряжении 1 кВ, для интегрированного переключения массивов актуаторов из диэлектрических эластомеров. Доп. Матер. 29 , 1700880 (2017).
Google ученый
Диллер Э. и Ситти М. Мобильная робототехника в микромасштабе. Найдено. Робот трендов. 2 , 143–259 (2011).
Google ученый
Wautelet, M.
Законы масштабирования в макро-, микро- и наномирах. евро. Дж. Физ. 22 , 601–611 (2001).Google ученый
Yan, G., Ye, D., Zan, P., Wang, K. & Ma, G. Микроробот для эндоскопа на основе беспроводной передачи энергии. в Proc. 2007 Международная конференция IEEE по мехатронике и автоматизации. 3577–3581 (2007).
Aldhaher, S., Mitcheson, P.D., Arteaga, J.M., Kkelis, G. & Yates, D.C. Легкая беспроводная передача энергии для зарядки дронов в воздухе. 2017 11 евро. конф. Распространение антенн, EUCAP 2017336–2017340 (2017) https://doi.org/10.23919/EuCAP.2017.7
Мирвакили С. М. и Хантер И. В. Искусственные мышцы: механизмы, применение и проблемы. Доп. Матер. 30 , 1704407 (2018).
Google ученый
Чен Ю. и др. Управляемый полет микроробота, приводимый в движение мягкими искусственными мышцами. Природа 575 , 324–329 (2019).
Google ученый
Ян, Л. и др. Мощный мягкий привод с двойным откликом и фотоэлектрический генератор на основе графеновых микрогазовых мешков для биоинспирированных приложений. Дж. Матер. хим. B 6 , 5031–5038 (2018).
Google ученый
Сонг Ю., Чен X., Дабаде В., Шилд Т. В. и Джеймс Р. Д. Повышенная обратимость и необычная микроструктура фазопреобразующего материала. Природа 502 , 85–88 (2013).
Google ученый
Лендлайн, А. Изготовление перепрограммируемых полимерных приводов с памятью формы для робототехники. науч. Робот. 3 , 2–4 (2018).
Google ученый
Зарек, М. и др. 3D-печать полимеров с памятью формы для гибких электронных устройств. Доп. Матер. 28 , 4449–4454 (2016).
Google ученый
Wei, K., Zhu, G., Tang, Y. & Li, X. Электроактивные эффекты памяти формы гидроэпоксидных композитов с сажей. Полим. J. 45 , 671–675 (2013).
Google ученый
Гориссен, Б., Винсенти, В., Аль-Бендер, Ф., Рейнартс, Д. и Де Волдер, М. Моделирование и изготовление без склеивания гибких жидкостных микроприводов с изгибающим движением. Дж. Микромех. Микроангл. 23 , 045012 (2013).
Карпи, Ф. и Де Росси, Д. Улучшение электромеханических характеристик срабатывания силиконового диэлектрического эластомера путем диспергирования порошка диоксида титана. IEEE Trans. Диэлектр. электр. Инсул. 12 , 835–843 (2005).
Google ученый
Ли, К.-Х. и другие. Высокоэластичный автономный самовосстанавливающийся эластомер. Нац. хим. 8 , 618–624 (2016).
Google ученый
Джайн, Р. К., Маджумдер, С., Гош, Б. и Саха, С. Разработка и производство мобильной системы микроманипуляций с микрозахватом на основе пьезоэлектрического привода. J. Изготовитель. Сист. 35 , 76–91 (2015).
Google ученый
Герин С., Тофаил С.А.М. и Томпсон Д. Органические пьезоэлектрические материалы: основные этапы и потенциал. NPG Азия Матер. 11 , 10 (2019).
Google ученый
Ву, Ю. и др. Быстрый и сверхпрочный мягкий робот размером с насекомое. Науч. Робот. 4 , aax1594 https://doi.org/10.1126/scirobotics.aax1594 (2019).
Jang, B. et al. Волнообразная локомоция магнитных многозвенных нанопловцов. Нано Летт. 15 , 4829–4833 (2015).
Google ученый
Cui, J. et al. Наномагнитное кодирование формообразующих микромашин. Природа 575 , 164–168 (2019).
Google ученый
Ливорейл, А., Дитрих-Бухекер, К.О. и Соваж, Ж.-П. Электрохимически инициированное раскачивание [2]-катената. Дж. Ам. хим. соц. 116 , 9399–9400 (1994).
Google ученый
Хубер, Дж. Э., Флек, Н. А. и Эшби, М. Ф. Выбор механических приводов на основе показателей производительности. Проц. Р. Соц. Лонд. сер. Математика. физ. англ. науч. 453 , 2185–2205 (1997).
Google ученый
Си, В. и др. Свернутые магнитные микросверла: на пути к малоинвазивной хирургии с дистанционным управлением. Наномасштаб 5 , 1294–1297 (2013).
Google ученый
9.
Bandari, V.K. et al. Гибкая микросистема, способная управлять движением и приводить в действие посредством беспроводной передачи энергии. Нац. Электрон. 3 , 172–180 (2020).
Google ученый
Митчесон, П. Д., Йетман, Э. М., Рао, Г. К., Холмс, А. С. и Грин, Т. С. Сбор энергии от движения человека и машины для беспроводных электронных устройств. Проц. IEEE 96 , 1457–1486 (2008).
Google ученый
Рю, Х., Юн, Х.Дж. и Ким, С.В. Гибридные сборщики энергии: на пути к устойчивому сбору энергии. Доп. Матер. 31 , 1802898 (2019).
Ли, Т. Д. и Эбонг, А. У. Обзор технологий тонкопленочных солнечных элементов и проблем. Продлить. Поддерживать. Energy Rev. 70 , 1286–1297 (2017).
Google ученый
Грин, М. А. и др. Таблицы эффективности солнечных батарей (версия 54). Прог. Фотовольт. Рез. заявл. 27 , 565–575 (2019).
Google ученый
Wei, C. & Jing, X. Всесторонний обзор сбора энергии вибрации: моделирование и реализация. Продлить. Поддерживать. Energy Rev. 74 , 1–18 (2017).
MathSciNet
Google ученый
Zhu, J. et al. Растяжимые широкополосные дипольные антенны и ректенны для сбора радиочастотной энергии. Матер. Сегодня физ. 18 , 100377 (2021).
Google ученый
Инь, Л. и др. Биотопливный элемент с пассивным потоотделением: высокая окупаемость инвестиций. Джоуль 5 , 1888–1904 (2021).
Google ученый
Zhang, X. S. et al. Моноблочные автономные гибкие микросистемы на основе трибоэлектрических наногенераторов. Nano Energy 47 , 410–426 (2018).
Google ученый
Дин, В., Ван, А.С., Ву, К., Го, Х. и Ван, З.Л. Взаимодействие человека и машины с помощью трибоэлектрических наногенераторов и триботроники. Доп. Матер. Технол. 4 , 1800487 (2019).
Google ученый
Скачать ссылки
Благодарности
Авторы хотели бы выразить благодарность за финансовую поддержку гранта программы EPSRC (EP/P012779/1).
Информация об авторе
Авторы и организации
Факультет электротехники и электроники, Имперский колледж Лондона, Выставочная дорога, Лондон, SW7 2AZ, Великобритания
Mayue Shi & Eric M. Yeatman
Авторы
- Mayue Shi
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar - Eric M. Yeatman
Просмотр публикаций автора
Вы также можете искать этого автора в
PubMed Google Scholar
Contributions
E. M.Y. возглавил и руководил этим обзором и разработал концепцию управления энергией и срабатыванием. РС. объединили данные из литературы и подготовили исходный проект, рисунки и таблицы. Э.М.И. и М.С. пересмотрел бумагу. Оба автора прочитали и согласились с опубликованной версией статьи.
Автор, ответственный за переписку
Переписка с
Маю Ши.
Заявление об этике
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Права и разрешения
Открытый доступ Эта статья находится под лицензией Creative Commons Attribution 4.0 International License, которая разрешает использование, совместное использование, адаптацию, распространение и воспроизведение на любом носителе или в любом формате, при условии, что вы укажете соответствующую ссылку на оригинальный автор(ы) и источник, предоставьте ссылку на лицензию Creative Commons и укажите, были ли внесены изменения. Изображения или другие сторонние материалы в этой статье включены в лицензию Creative Commons для статьи, если иное не указано в кредитной строке материала. Если материал не включен в лицензию Creative Commons статьи, а ваше предполагаемое использование не разрешено законом или выходит за рамки разрешенного использования, вам необходимо получить разрешение непосредственно от правообладателя. Чтобы просмотреть копию этой лицензии, посетите http://creativecommons.org/licenses/by/4.0/.
Перепечатки и разрешения
Об этой статье
Испытание на прочность искусственных мышц | Feature
Задумайтесь на минуту о том, что делает ваше тело, пока вы читаете это. Ваши глаза сканируют страницу; ваши пальцы нажимают на клавиатуру или проводят пальцем по экрану; ваши руки, возможно, держат бумажную копию Chemistry World ; ваша спина поддерживает вас, когда вы сидите на стуле. Даже когда мы занимаемся чем-то таким сидячим, как чтение, наши мышцы постоянно работают. Как бы за кулисами, сердечные мышцы заставляют наше сердце биться, а гладкие мышцы выполняют другие непроизвольные функции, такие как пищеварение. Все эти действия и многое другое — Усэйн Болт, пробежавший рекордные 100 метров, крылья колибри, взмахивающие 50 раз в секунду, паническое бегство слона — приводятся в действие мышцами с очень похожими структурами и механизмами действия.
Мышечная ткань необычайно универсальна, но ее структура кажется довольно простой. Поэтому неудивительно, что идея подражания его свойствам существует уже многие поколения. Первым, кто серьезно исследовал это, был эрудит 17-го века Роберт Гук. Он может быть наиболее известен студентам-физикам благодаря своему одноименному закону, но он также внес значительный вклад в биологические науки: он был первым, кто рассмотрел микроорганизмы через микроскоп, и первым придумал слово «клетка». Попытки Гука создать машину для преобразования силы в движение подобно тому, как естественные мышцы использовали порох для подачи силы. «У меня был способ создать искусственную мускулатуру, чтобы управлять силой 20 человек», — прокомментировал он, хотя эксперименты, похоже, были прекращены довольно быстро.
На базовом уровне мышцы можно описать как биологические исполнительные механизмы
Там, где Гук использовал порох для получения энергии для движения, биологические мышцы используют почти универсальный биохимический источник энергии, аденозинтрифосфат (АТФ). За последние полвека биологи и биохимики неустанно работали, чтобы определить их структуру и механизм, и таким образом предоставить сегодняшним разработчикам искусственных мышц шаблон для работы со всеми молекулярными деталями. Это предприятие началось с новаторского структурного биолога Кена Холмса в Лаборатории молекулярной биологии MRC в Кембридже, Великобритания, где он объяснил молекулярный механизм мышечного сокращения.
Металлические мышцы
Структура скелетных мышц, также известных как «произвольные» мышцы, поскольку они находятся под контролем нервной системы, была известна с низким разрешением задолго до того, как Холмс начал изучать их молекулярный состав. Эти мышцы состоят из регулярно повторяющихся функциональных единиц, или саркомеров, что придает им характерный исчерченный (или полосатый) вид под световым микроскопом. Мышечная ткань состоит из пучков длинных волокнистых клеток, каждая из которых содержит множество ядер и множество длинных параллельных миофибрилл. В свою очередь, каждая миофибрилла состоит из нескольких копий двух длинных белков, миозина и актина, вместе с белками, которые связывают их вместе, образуя толстые и тонкие филаменты соответственно. Миозин обеспечивает двигатель для сокращения мышц. Вкратце, каждая молекула миозина имеет моторный домен, состоящий из двух «головок», которые могут изгибаться из изогнутой в прямую конформацию за счет гидролиза АТФ, и длинный тонкий хвост, который расположен параллельно соседним молекулам актина. Возможно, вопреки интуиции, миозин и другие моторные белки можно рассматривать просто как катализаторы гидролиза АТФ: эти моторные белки являются ферментами.
Источник: © Science Photo Library
Мышцы состоят из иерархических пучков волокон и филаментов, наименьшими из которых являются миофиламенты, состоящие из белков актина и миозина. нити, чтобы схватиться за соседнюю тонкую нить и «пройтись» по ней, согласованно изгибаясь и растягиваясь, гидролизуя в процессе огромное количество молекул АТФ. Интересно, что головки миозина могут перемещаться вдоль актиновых филаментов только в одном направлении, и каждая отдельная мышца может сокращаться и расслабляться, но не растягиваться. Их сила исходит от скоординированных действий: простейшее действие, такое как поднятие легкого предмета со стола, требует, чтобы миллиарды миозиновых головок двигались как одна.
На базовом уровне мышцы можно описать как биологические исполнительные механизмы. Это название, данное компонентам машин, которые производят и контролируют движение системы; ученые и инженеры, работающие над искусственными мышцами, часто называют их просто приводами. По определению, любой исполнительный механизм требует как источника энергии, так и средства управления движением посредством сигнализации. В случае скелетных мышц источником энергии, конечно же, является АТФ, а управление осуществляется нервной системой.
Наше растущее понимание сложной структуры и механизма мышечных волокон на молекулярном уровне, несомненно, вдохновило многие группы, которые сейчас работают над созданием искусственных приводов со свойствами, подобными скелетным мышцам. Однако нет необходимости воспроизводить структуру мышечных волокон на молекулярном уровне или даже близком к нему, чтобы производить материалы с аналогичными или, возможно, достаточно похожими свойствами, чтобы быть полезными. В недавнем обзоре Сейед Мирвакили, исполнительный директор компании Seron Electronics в Ванкувере, Канада и до недавнего времени постдокторант Массачусетского технологического института, описал широкий спектр материалов, включая простые металлы, волокна и пластмассы, которые недавно легли в основу таких приводов. Многие из этих материалов вполне обычные, простые, их можно легко купить у поставщика; свойства, которые позволяют использовать их в качестве искусственных мышц или в них, обусловлены их структурой.
Проводящие волокна с поперечным сечением в десятки нанометров или менее, известные как нанопроволоки, часто используются в приводах. Они могут быть любой длины, но настолько тонкие, что их свойства не могут быть описаны только с помощью традиционной механики, и их называют квантовыми волокнами. Их полезность в качестве исполнительных механизмов проистекает из того факта, что они могут производить движение в ответ на свет, электрические или магнитные поля. Большая часть собственных исследований Миркавелли в области приводов в системах доставки лекарств включала волокна, изготовленные из нанопроволок на основе ниобия. Свойства этого пластичного переходного металла делают его идеально подходящим для клинического использования: он обладает чрезвычайно высокой электропроводностью, химически инертен и поэтому чрезвычайно безопасен для клинического использования и относительно легко доступен. «Ниобий не является редкоземельным элементом, экзотическим или даже особенно дорогим», — говорит Миркавелли. «Он часто используется в более традиционных медицинских устройствах, а некоторые страны использовали его на монетах, потому что он придает красивый цвет поверхности при окислении». Проводимость этих волокон примерно в 100 раз выше, чем у углеродных нанотрубок, которые использовались в аналогичных устройствах; они также обладают очень высокой емкостью, что означает, что их также можно использовать для создания очень сильных магнитных полей для аппаратов МРТ.
Мягкая сила
Ив Перриар, глава Центра искусственных мышц Федеральной политехнической школы Лозанны в Швейцарии, и его команда разрабатывают так называемые «мягкие приводы» из податливых электроактивных полимеров для клинического применения. Их диэлектрический эластомерный привод (DEA) представляет собой сверхэластичный полимер на основе силикона, зажатый между двумя высоковольтными углеродными электродами и изолированный. «Процесс, который мы используем для производства DEA, настолько чувствителен, что нам приходится начинать заново, если внутрь попадает хотя бы один кусочек пыли», — объясняет он.
Источник: © Jamani Caillet/EPFL
Привод в форме трубки можно закрепить вокруг аорты, чтобы улучшить работу сердца и уменьшить потребность в трансплантатах предназначены для того, чтобы обвивать аорту — главную артерию, которая несет кровь от сердца к телу — и ритмично сокращаться в ответ на электрический сигнал. Следовательно, он будет сдавливать кровеносный сосуд, нагнетая кровь в сердце и тем самым усиливая функцию аорты. С тех пор как Кристиан Барнард провел первую успешную пересадку сердца в Южной Африке в 1967, более 50 000 пациентов пересадили донорское сердце, и в среднем реципиент живет около 15 лет после трансплантации. Однако эта процедура является инвазивной, дорогой и сильно ограничена количеством доступных донорских сердец: даже до пандемии Covid пациентам в Великобритании часто приходилось ждать трансплантации несколько лет. Искусственная мышца, разрабатываемая Перриардом и его командой, предназначена для поддержки больного сердца, отсрочки или даже предотвращения необходимости пересадки. «У нашего устройства есть еще одно существенное преимущество, заключающееся в том, что оно расположено вокруг аорты и поэтому не попадает в камеры сердца или кровоток», — говорит Перриар. «Поэтому операция менее инвазивна, чем операция на открытом сердце, и пациентам не нужно принимать антикоагулянты, чтобы предотвратить свертывание крови вокруг устройства».
В ходе четырехчасовой операции в апреле 2021 года на аорту живой свиньи был помещен трубчатый привод. Это поддерживало сердцебиение свиньи на протяжении всей операции, позволяя ей более эффективно перекачивать кровь. «Аорта свиньи имеет такой же диаметр, как у человека, и диапазон ее артериального давления такой же, поэтому животное близко к идеальной модели для наших экспериментов», — говорит Перриар. «Однако восходящая аорта — часть, ближайшая к сердцу, где искусственная мышца должна быть расположена для обеспечения наибольшей дополнительной энергии — недостаточно длинна, чтобы вместить ее; теленок был бы более близкой моделью в этом отношении.» До клинических испытаний еще несколько лет, но успех первых испытаний на животных позволил получить еще 8 миллионов швейцарских франков (6,5 миллионов фунтов стерлингов) в виде гранта от Фонда Вернера Сименса для Центр искусственных мышц. И группа Перриарда начинает разработку мягких приводов для двух дополнительных клинических применений: для поддержки функции уретры у пациентов, страдающих недержанием мочи, и для восстановления мимики после инсультов.
Вдохновение насекомых
Приводы из диэлектрического эластомера сложно изготовить, но они, по крайней мере, достаточно велики, чтобы ими можно было управлять. Хунцян Ван из Южного университета науки и технологий (SUSTech) в Шэнчжэне, Китай, и его коллеги разрабатывают мезомасштабные приводы, вдохновленные биологическими мышцами, в качестве компонентов для роботов размером с насекомое. Обычные электромагнитные двигатели относительно тяжелые, громоздкие, и их трудно встроить в оборудование такого масштаба; Напротив, мышцы насекомых развивались более полумиллиарда лет, чтобы стать прочными, легкими и гибкими. В молекулярном масштабе мышцы насекомых удивительно похожи на мышцы позвоночных. «Эти миниатюрные приводы спроектированы по иерархической схеме, имитирующей биологические мышцы, с массивами миниатюрных электродов, заменяющих нити актина и миозина», — объясняет Ван.
Источник: © Hongqiang Wang group
Команда Hongqiang Wang черпала вдохновение в мышцах насекомых, чтобы создать инструмент, который ползает, как дождевой червь (слева), и другой инструмент, который можно использовать в хирургии (справа)
Группа SUSTech разработала двух очень разных миниатюрных роботов в качестве тематических исследований, чтобы проиллюстрировать универсальность своих идей: инструмент для ползания, похожий на дождевого червя, и режущий инструмент, который можно использовать в хирургии. Первый имеет очень маленькое поперечное сечение, что позволяет ему пролезать через узкие щели и может использоваться для осмотра или поисково-спасательных работ в токсичных средах. «Наш робот может быть тонким и гибким, но он удивительно надежен, в большей степени, чем другие инструменты с аналогичным назначением», — добавляет Ван. «Он может даже восстановиться, если вы наступите на него». Режущий инструмент можно использовать в хирургии для удаления опухолей и взятия образцов тканей для биопсии очень точно и точно. Для других потенциальных приложений потребуются роботы, которые могут вести себя, например, как летающие муравьи, и это, вероятно, возможно только потому, что приводы, которые они включают, очень легкие и гибкие.
Совершенно очевидно, что можно сконструировать материалы, обладающие функциональными свойствами мышц, но почти не обладающие их структурными свойствами, по крайней мере, на микроскопическом уровне; из приводов, описанных здесь, приводы в насекомоподобных роботах Ванга — единственные, которые имеют какие-либо общие черты с микроструктурой скелетных мышц. По мере того, как мы будем узнавать все больше о механизме действия мышечных белков, вполне вероятно, что приводы будут разрабатываться так, чтобы более точно имитировать их структуру. А миозин — лишь один из семейства моторных белков, которые преобразуют химическую энергию, запасенную в АТФ, в движение. Кинезин и более крупный и сложный динеин являются гомологичными белками, которые используют головные домены, чтобы «ходить» в противоположных направлениях вдоль микротрубочек в цитоскелете клетки, захватывая с собой органеллы и макромолекулярные комплексы в качестве «груза». Кинезин играет ключевую роль в митозе или клеточном делении, перемещая клеточные компоненты к противоположным концам клетки перед ее делением; существует несколько классов молекул динеина с различными функциями, включая движение яйцеклеток и сперматозоидов. Некоторые вирусы, в том числе ВИЧ, захватывают динеин и транспортируются к ядрам инфицированных клеток.
Структуры кинезина и динеина были определены с помощью рентгеновской кристаллографии, метода, который Холмс использовал для получения ранних структур актина и миозина, но в последнее время был достигнут больший прогресс с использованием электронной микроскопии. «Революция разрешения» в электронной микроскопии за последние несколько лет позволила нам визуализировать молекулы динеина, прикрепленные к их дорожкам микротрубочек, — говорит Энтони Робертс, структурный биолог из колледжа Биркбек. Эмуляция этих моторных белков и, возможно, материала со свойствами пружиноподобного титина — самого длинного и крупного белка человека, отвечающего за эластичность мышечной ткани, — с новыми материалами может поставить будущие задачи перед разработчиками искусственных мышц. .
Клэр Сэнсом, научный писатель из Кембриджа, Великобритания
Возможно ли создание сильных и быстро переключающихся искусственных мышц?
Университет науки и технологий Пхохана (POSTECH)
Схематическая диаграмма формирования ионных каналов внутри полимерного электролита. 1 кредит
В американском боевике «Тихоокеанский рубеж» гигантские роботы по имени «Егери» сражаются с неизвестными монстрами, чтобы спасти человечество. Эти роботы оснащены искусственными мышцами, имитирующими настоящие живые тела, и побеждают монстров силой и скоростью. Ведутся исследования по оснащению настоящих роботов искусственными мышцами, подобными тем, что показаны в фильме. Однако мощная сила и высокая скорость в искусственных мышцах не могут быть реализованы, поскольку механическая прочность (сила) и проводимость (скорость) полимерного электролита — ключевых материалов, приводящих в движение актуатор, — имеют противоречивые характеристики.
Исследовательская группа POSTECH под руководством профессора Мун Чжон Пака, профессора Чан Юн Сона и профессора Руй-Янг Ван из химического факультета разработала новую концепцию полимерного электролита с различными функциональными группами, расположенными на расстоянии 2Å. Этот полимерный электролит способен как к ионному, так и к водородному взаимодействию, что открывает возможность разрешения этих противоречий. Результаты этого исследования были недавно опубликованы в Advanced Materials 9.0122 .
Искусственные мышцы используются для того, чтобы роботы двигали конечностями естественно, как люди. Для управления этими искусственными мышцами требуется привод, демонстрирующий механическое преобразование в условиях низкого напряжения. Однако из-за природы полимерного электролита, используемого в приводе, сила и скорость не могут быть достигнуты одновременно, потому что увеличение мышечной силы замедляет скорость переключения, а увеличение скорости снижает силу.
Чтобы преодолеть представленные до сих пор ограничения, в исследовании была представлена инновационная концепция бифункционального полимера. За счет формирования одномерного ионного канала шириной несколько нанометров внутри полимерной матрицы, твердой как стекло, получен суперионный полимерный электролит с высокой ионной проводимостью и механической прочностью.
Различные движения привода низковольтного привода. 1 кредит
Химическая структура бифункционального полимерного звена. 1 кредит
Результаты этого исследования могут создать инновации в мягкой робототехнике и носимых технологиях, поскольку их можно применить для разработки беспрецедентной искусственной мышцы, которая подключает портативную батарею (1,5 В), производит быстрое переключение в несколько миллисекунд (тысячных долей секунды). секунду) и большая сила. Кроме того, ожидается, что эти результаты будут применяться в полностью твердотельных электрохимических устройствах следующего поколения и высокостабильных литий-металлических батареях.
Узнать больше
Новый путь разработки полимерных аккумуляторов нового поколения
Дополнительная информация:
Руи-Янг Ван и др., Суперионные бифункциональные полимерные электролиты для хранения и преобразования энергии в твердом состоянии, Advanced Materials (2022). DOI: 10.1002/adma.202203413
Информация журнала:
Дополнительные материалы
Предоставлено
Пхоханский университет науки и технологий (POSTECH)
Цитата :
Будет ли возможным создание сильных и быстро переключающихся искусственных мышц? (2022, 12 августа)
получено 3 октября 2022 г.
с https://phys.org/news/2022-08-strong-fast-switching-artificial-muscle-feasible.html
Этот документ защищен авторским правом. Помимо любой добросовестной сделки с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в ознакомительных целях.
Искусственные мышцы идут в ногу со временем – Physics World
Миниатюрная рука с пучком мышц. Предоставлено: Полина Аникеева (MIT)
Искусственные мышцы можно использовать во множестве приложений, включая миниатюрные медицинские устройства, робототехнику и умные ткани, которые реагируют на изменения в окружающей среде. Однако большинство таких мышц, созданных на сегодняшний день, тяжелы и громоздки, хотя и относительно медленно приводятся в действие. Три исследовательские группы в настоящее время сообщают о новых конструкциях искусственных мышц на основе волокон, легких и быстрых.
Группа под руководством Полины Аникеевой из Массачусетского технологического института использовала технику вытягивания для создания двустороннего полимерного волокна, которое можно активировать при нагревании и которое может поднимать в 650 раз больше собственного веса, выдерживая деформации более 1000% за тысячи циклов использования. Пучки отдельных волокон могут поднимать еще более тяжелые грузы, как и их биологические аналоги.
Исследователи говорят, что могут производить искусственные мышцы в больших количествах — в масштабе сотен метров — с поперечными размерами от микронов до миллиметров. Это означает, что технология может быть использована в приложениях от микромасштаба (например, в медицинских микророботах для хирургии) до макромасштаба (например, легкие протезы конечностей).
Двухслойный сэндвич
Исследователи изготовили свои волокна, сначала изготовив преформу, которая представляет собой макромасштабную модель волокна, которое затем нагревают и растягивают так, что его длина достигает сотен метров, а характеристики поперечного сечения уменьшаются на 10 до 10000 раз. Они использовали двухслойный сэндвич из двух материалов — эластомера циклического олефинового сополимера (COCE), который представляет собой растяжимый эластомер с низким коэффициентом теплового расширения, и полиэтилена (PE), который является еще одним стандартным нерастяжимым полимером с более высоким коэффициентом теплового расширения. .
«После того как мы вытянули наши волокна, мы можем растянуть их на 1000%, — объясняет Аникеева. «Во время этого процесса эластомер растягивается, но другой полимер постоянно пластически деформируется. Как только мы ослабляем натяжение, эластомер пытается сжаться, но другой полимер не может, в результате чего волокно скручивается в пружину. Это наши мышцы, основанные на волокнах».
Когда исследователи нагревают материал, полиэтилен пытается расшириться еще больше, но эластомер с низким тепловым расширением расширяется не так сильно. Это приводит к дальнейшему сжатию пружины, которая является механизмом, лежащим в основе срабатывания.
Легкие и быстрые
Поскольку новые искусственные мышцы сделаны из полимеров, они легкие. Они также могут работать при умеренных изменениях температуры, а время отклика составляет всего несколько десятков миллисекунд, что позволяет работать на высокой скорости.
Аникеева и ее коллеги также покрыли свои волокнистые мышцы сетками из проводящих металлических нанопроволок, которые при растяжении или сжатии изменяют свое сопротивление. Таким образом, их можно использовать для обратной связи по деформации, что означает, что они могут измерять точную силу, степень деформации или температуру срабатывания, которую они испытывают.
Однако для срабатывания устройств по-прежнему требуется внешний тепловой раздражитель, что явно не идеально для инженерных приложений. «Поэтому мы стремимся интегрировать внутренние нагревательные элементы в наши искусственные мышцы», — рассказывает Аникеева Physics World . «А поскольку производство на основе волокна применимо ко многим материалам с различными свойствами, мы можем встраивать в наши устройства дополнительные функции, такие как оптические функции».
Возможности для этого типа искусственных мышц практически безграничны, говорит ведущий автор исследования Мехмет Каник, потому что может работать любая комбинация двух материалов с разными коэффициентами теплового расширения.
Оболочка приводит в движение мышцы
Вторая группа под руководством Рэя Боумана из Техасского университета в Далласе разработала другой тип волокна, изготовленного из полимерных нитей, которые могут генерировать в 40 раз больше механической энергии в секунду, чем человеческие мышцы и мышцы. в девять раз больше, чем самые мощные альтернативные электрохимические мышцы, созданные на сегодняшний день.
Скрученная нить из углеродных нанотрубок (CNT) (слева) и искусственная мышца с оболочкой (SRAM). Авторы и права: Р. Боуман, Техасский университет в Далласе, 9.0002 Боуман и его коллеги опирались на свою предыдущую работу над мышцами из пряжи из углеродных нанотрубок (CNT) с гостевым наполнением и мышцами из полимерного волокна, которые, хотя и продемонстрировали замечательную производительность, все же страдали от нескольких проблем. Во-первых, центральная область мышцы мало способствовала мышечному сокращению, хотя энергия прикладывалась ко всей структуре.
«Теперь мы преодолели этот недостаток, приводя мышцу в движение с помощью оболочки, которая может быть недорогой спиральной нитью или сердцевиной волокна», — объясняет Боуман. «Оболочка нашей новой электрохимической мышцы генерирует 1,98 кВт/кг средней мощности при сокращении мышц. При термическом воздействии мы можем получить среднюю выходную мощность сокращения за полный цикл 9,0 кВт / кг и 12 мышечных сокращений в секунду для мышцы с полимерной оболочкой и сердцевиной из спиральной нити CNT. Для сравнения, сила сокращения человеческих мышц составляет всего 50 Вт/кг».
В качестве материалов оболочки исследователи использовали несколько различных полимеров. Например, PEO-SO3, представляющий собой смесь полиэтиленоксида и сополимера тетрафторэтилена и винилового эфира сульфонилфторида, реагирует на пары этанола. Полиуретан реагирует на тепло, а оболочки из углеродных нанотрубок (УНТ) набухают в ответ на электрохимические заряды.
Внутреннее ядро обеспечивает жесткость
Внутреннее ядро конструкции обеспечивает мышечную силу и жесткость и направляет скручивание волокна. «В простейшей структуре, которую можно использовать в умном текстиле, мы делаем наши искусственные мышцы с оболочкой (SRAM), используя доступную в продаже недорогую скрученную пряжу (например, нейлон) в качестве сердцевины и коммерчески доступный полимер в качестве основы. оболочки», — рассказывает Боуман Physics World . «Мы растворяем полимер оболочки в растворителе, который не будет проникать в сердцевину, наносим его на полимер сердцевины до соответствующей толщины (размер которой важен для производительности). Затем мы добавляем достаточную крутку, чтобы свернуть пряжу с оболочкой, в то время как полимер оболочки находится в деформируемом состоянии».
Создание электрохимической оболочки мышцы немного сложнее, говорит он. Здесь исследователи скручивают стопку листов углеродных нанотрубок цилиндрической формы вокруг сердцевинного волокна (которое в настоящей работе представляет собой нейлоновую нить) до тех пор, пока пряжа полностью не свернется.
Множество приложений
Эти SRAM могут найти применение во множестве приложений. К ним относятся микромасштабные приводы, которые интеллектуально управляют потоком в гидравлических контурах, и макромасштабные массивы приводов для роботов-гуманоидов и экзоскелетов. Покрытые оболочкой мышцы, которые собирают химическую или тепловую энергию в виде механической энергии, которая затем преобразуется в электрическую энергию, также являются интересной возможностью для питания датчиков с дистанционной связью, например, и сбора электрической энергии из потоков промышленных отходов.
«Они также могут использоваться в тканях, которые реагируют на температуру и влажность (например, пот), изменяя свою пористость», — добавляет Боуман. «Мы также изучаем эту способность разумно реагировать на окружающую среду для интеллектуальных систем доставки лекарств, которые, например, обнаруживают присутствие антигенов и реагируют, заключая контракт, чтобы выпустить соответствующее лекарство». Исследователи говорят, что они уже получили многообещающие результаты на ранних стадиях для таких устройств.
Непривязной высокоэнергетический микродвигатель
Третья исследовательская группа под руководством Джинкай Юаня и Филиппа Пулена из Университета Бордо во Франции создала неуправляемый высокоэнергетический микродвигатель, состоящий из нанокомпозитных волокон с памятью формы. Эти волокна скручены для накопления механической энергии, которая затем может быть высвобождена по требованию при небольшом изменении температуры.
Волокно ПВА крученое. Предоставлено: Jinkai Yuan
«Независимое управление является большой проблемой для современной робототехники, особенно для имплантатов и подводных аппаратов», — говорит Юань. «Наша концепция открывает новый путь к беспрепятственному приведению в действие, управлению и движению в робототехнике».
Исследователи изготовили скрученные нанокомпозитные волокна с памятью формы из полимера с памятью формы поливинилового спирта (ПВС) в качестве матрицы, заполненной диспергированными пластинками оксида графена. Нанолисты оксида графена играют важную роль в улучшении свойств волокна при кручении благодаря своей уникальной жесткой двумерной структуре. Это позволяет волокну накапливать больше механической энергии внутри волокна, прежде чем оно сломается.
Раскручивание высвобождает механическую энергию
ПВА можно запрограммировать на принятие определенной формы – например, сильно скрученной конформации, как в данном случае – при высокой температуре. Затем его подвергают термической закалке, чтобы зафиксировать скрученную форму. В этой работе исследователи ввели в волокно скрутку в тысячи витков на метр длины волокна со скоростью вращения в несколько десятков оборотов в минуту (об/мин). При нагревании чуть выше температуры программирования механическая энергия, накопленная скрученным волокном, быстро высвобождается, поскольку оно восстанавливает свою прямую форму при раскручивании.
Спиральная структура может сохранять свою форму, не будучи привязанной, из-за стеклянной неравновесной конформации спирально сконфигурированных полимерных цепей, рассказывает Юань Physics World .
«Еще одно преимущество скрученных нанокомпозитных волокон с памятью формы заключается в том, что они обладают отличительной особенностью температурной памяти, которая позволяет нам настраивать рабочую температуру в широком диапазоне и поэтапно высвобождать накопленную энергию», — добавляет он. «Это означает, что они демонстрируют максимальный крутящий момент восстановления и скорость вращения при четко определенной температуре — той, при которой они были предварительно деформированы».
Подробнее
Гидрогелевый материал, сгибающий мышцы
Рекордная рабочая плотность
Нанокомпозитные волокна с памятью формы способны обеспечивать рекордную рабочую плотность около 2,8 кДж/кг и могут работать не менее 10 циклов до выхода из строя. Они также потенциально могут быть соединены с эластичными нитевидными сердечниками, чтобы обеспечить крутящий момент, который позволяет им многократно активироваться, как искусственная мышца.
«Наши устройства на основе волокон с памятью формы могут размещаться в небольших помещениях и надежно вращаться с высокой скоростью», — говорит Юань. «Это означает, что их можно использовать в микроробототехнике, лабораториях на чипе, умном текстиле и миниатюрных медицинских устройствах, и это лишь несколько примеров».
Команда из Бордо говорит, что сейчас они пытаются внедрить реверсивное срабатывание в свои волокна.
Все три группы сообщают о своей работе в разделе Наука . Полная информация об исследовании группы Аникеевой находится здесь, Боумана и ее коллег здесь, а Юань и Пулин здесь.
Искусственные мышцы наделяют мягких роботов сверхспособностями. рывковые машины, которые изгибаются и изгибаются таким образом, который имитирует живые организмы и может более естественно взаимодействовать с ними. Однако повышенная гибкость и ловкость имеют компромисс в виде снижения прочности, поскольку более мягкие материалы, как правило, не такие прочные и эластичные, как негибкие, что ограничивает их использование.
Воспроизвести
В этом видео показано, как искусственным мышцам, вдохновленным оригами, можно придать практически любую форму и поднять в 1000 раз больше собственного веса. Авторы и права: Институт Висса Гарвардского университета
Теперь исследователи из Института Висса Гарвардского университета и Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) создали искусственные мышцы, вдохновленные оригами, которые добавляют силу мягким роботам, позволяя им поднимать предметы, которые до 1000 раз больше собственного веса, используя только давление воздуха или воды, что придает столь необходимую силу мягким роботам. Исследование опубликовано на этой неделе в Труды Национальной академии наук ( PNAS ).
«Мы были очень удивлены тем, насколько сильными были приводы [также известные как «мускулы»]. Мы ожидали, что их максимальный функциональный вес будет выше, чем у обычных мягких роботов, но не ожидали тысячекратного увеличения. Это все равно, что наделить этих роботов сверхспособностями», — говорит Даниэла Рус, доктор философии, профессор электротехники и компьютерных наук Эндрю и Эрны Витерби в Массачусетском технологическом институте и один из старших авторов статьи.
Искусственные мышцы, вдохновленные оригами, способны поднимать в 1000 раз больше собственного веса, просто применяя давление воздуха или воды. Предоставлено: Шугуан Ли / Институт Висса Гарвардского университета
. «Искусственные мышечные приводы — одна из самых важных глобальных задач во всей инженерии», — добавляет Роб Вуд, доктор философии, автор статьи и один из основателей профессорско-преподавательского состава. из Института Висса, который также является профессором инженерных и прикладных наук им. Чарльза Ривера в Гарвардской школе инженерных и прикладных наук имени Джона А. Полсона (SEAS). «Теперь, когда мы создали приводы со свойствами, подобными природным мышцам, мы можем представить создание практически любого робота практически для любой задачи».
Каждая искусственная мышца состоит из внутреннего «скелета», который может быть изготовлен из различных материалов, таких как металлическая катушка или лист пластика, сложенный по определенной схеме, окруженный воздухом или жидкостью и запечатанный внутри пластикового или текстильного мешка, который служит «кожей». Вакуум, приложенный к внутренней части мешка, инициирует движение мышц, заставляя кожу сваливаться на скелет, создавая напряжение, которое приводит в движение. Невероятно, но для управления движением мышц не требуется никакого другого источника энергии или вмешательства человека; она полностью определяется формой и составом скелета.
«Одним из ключевых аспектов этих мышц является то, что они программируемые, в том смысле, что проектирование того, как складывается скелет, определяет, как движется вся структура. По сути, вы получаете это движение бесплатно, без необходимости в системе управления», — говорит первый автор Шугуан Ли, доктор философии, научный сотрудник Института Висса и MIT CSAIL. Такой подход позволяет мышцам быть очень компактными и простыми и, таким образом, более подходящим для мобильных или устанавливаемых на теле систем, которые не могут вмещать большое или тяжелое оборудование.
Искусственные приводы, похожие на мускулы, являются одной из самых важных задач во всей инженерии.
Роберт Вуд
«При создании роботов всегда приходится спрашивать: где разум — в теле или в мозгу?», — говорит Рус. «Внедрение интеллекта в тело ( через конкретных шаблонов складывания, в случае с нашими приводами) может упростить алгоритмы, необходимые для направления робота к его цели. Все эти приводы имеют один и тот же простой переключатель включения/выключения, который затем преобразуется их корпусом в широкий диапазон движений».
Команда сконструировала десятки мышц, используя различные материалы, от металлических пружин до упаковочной пены и листов пластика, и экспериментировала с различными формами скелета, чтобы создать мышцы, которые могут сокращаться до 10% от их первоначального размера, поднимая нежный цветок над землей. , и скрутить в змеевик, просто высосав из них воздух.
Структурная геометрия искусственного мышечного скелета определяет движение мышцы. Предоставлено: Шугуан Ли / Институт Висса при Гарвардском университете
Искусственные мышцы не только могут двигаться разными способами, они делают это с впечатляющей упругостью. Они могут генерировать примерно в шесть раз больше силы на единицу площади, чем скелетные мышцы млекопитающих, а также невероятно легкие; 2,6-граммовая мышца может поднять 3-килограммовый объект, что эквивалентно утке кряквы, поднимающей автомобиль. Кроме того, одну мышцу можно построить за десять минут из материалов, которые стоят менее 1 доллара, что делает их дешевыми и простыми в тестировании и повторении.
Эти мышцы могут приводиться в действие вакуумом, что делает их более безопасными, чем большинство других искусственных мышц, которые в настоящее время тестируются. «Многие приложения мягких роботов ориентированы на человека, поэтому, конечно, важно думать о безопасности», — говорит Даниэль Фогт, магистр наук, соавтор статьи и инженер-исследователь в Институте Висса. «Мышцы, основанные на вакууме, имеют меньший риск разрыва, отказа и повреждения, и они не расширяются во время работы, поэтому вы можете интегрировать их в роботов, более плотно прилегающих к человеческому телу».
«В дополнение к свойствам, подобным мышцам, эти мягкие актуаторы обладают высокой масштабируемостью. Мы создали их размером от нескольких миллиметров до метра, и их производительность остается неизменной», — говорит Вуд. Эта функция означает, что мышцы могут использоваться во многих приложениях в разных масштабах, таких как миниатюрные хирургические устройства, носимые роботизированные экзоскелеты, трансформируемая архитектура, глубоководные манипуляторы для исследований или строительства и большие развертываемые конструкции для освоения космоса.
Команде даже удалось сконструировать мышцы из водорастворимого полимера ПВС, что открывает возможности для роботов, которые могут выполнять задачи в естественных условиях с минимальным воздействием на окружающую среду, а также для проглатываемых роботов, которые перемещаются в нужное место в нужном месте. тело, а затем растворяются, высвобождая лекарство. «Возможности действительно безграничны. Но следующее, что я хотел бы построить с этими мышцами, — это робот-слон с хоботом, который может манипулировать миром таким же гибким и мощным способом, как у настоящих слонов», — говорит Рус.