Содержание
Как сделать робота своими руками / Схемы, чертежи, видео, инструкции по сборке роботов дома
В данном разделе сайта вы найдете подробные инструкции по сборке роботов своими руками в мастерской или даже у себя дома. Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
Подборки:
Сделай робота из StarWars
DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкция
В этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту. Достаточно легкий в изготовлении робот, не требующий никаких дорогостоящих комплектующих. Попробуйте сделать такого робота самостоятельно. Смотрите подробности…
Достаточно легкий в изготовлении робот, не требующий никаких дорогостоящих комплектующих. Попробуйте сделать такого робота самостоятельно. Смотрите подробности…
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданию
Возможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под…
DIY: Реалистичная робот-рыба из пвх трубы под Arduino. Пошаговая инструкция по созданию
В этой инструкции показано подробно, как сделать своими руками робота-рыбу из обычной водопроводной трубы, который сможет плавать в воде и даже использоваться в промышленных целях. Для его создания понадобиться не так уже много материалов и времени…
Для его создания понадобиться не так уже много материалов и времени…
DIY: Робот с голосовым управлением и зрением на базе MakeBlock и Android. Пошаговая инструкция по созданию
В данной инструкции мы расскажем, как оснастить простого гусеничного робота из конструктора MakeBlock компьютерным зрением и управлением от голосовых команд. Вам может показаться это сложной задачей, но на самом деле все очень просто…
DIY: Подталкиватель мышки на LEGO Mindstorms. Пошаговая инструкция по изготовлению
В данной инструкции мы хотим поделиться с вами навыками построения
робота на основе комплекта Mindstorm, который двигает вашу компьютерную
мышь. Вам наверняка интересно узнать, зачем нужно использовать такую
дорогую вещь для такой простой задачи? Цель этого робота – уберечь ваш
компьютер …
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Пошаговая инструкция по изготовлению
Популярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию ин…
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданию
Это руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобств…
DIY: Роботизированная рука на базе LEGO Mindstorm NXT. Пошаговая инструкция по созданию
Пошаговая инструкция по созданию
В данной инструкции мы расскажем вам, как можно построить самостоятельно
роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в
этой инструкции автор хотел сделать штатив для своей камеры. Но это
оказалось трудным заданием. После нескольких экспериментов автору
удалось с…
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданию
Если вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движения…
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданию
Sneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности. Sneel является биомиметическим, мобильным, водным роботом с открытым исходным кодом. Электромех…
Он предназначен для перемещения в неизвестной территории и экстремальной местности. Sneel является биомиметическим, мобильным, водным роботом с открытым исходным кодом. Электромех…
DIY: Arduino управляемый робот для игры в пинг-понг. Пошаговая инструкция по созданию
Эта пусковая установка для пинг-понга управляется от Arduino. Конструкция использует сервопривод для распределения шариков и два двигателя с колесами для скорости и ловкости толчков…
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданию
Представляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться. Возможность сохранения пу…
Возможность сохранения пу…
Раздел посвящен схемам создания и изготовления роботов своими руками. Все описано подробно, шаг за шагом, весь процесс создания робота или беспилотника. Хотели бы Вы знать, как сделать квадрокоптер своими руками? У нас вы найдете фото и видео инструкции по этому процессу с подробным описанием каждого шага. Каждый пользователь, приложив достаточно усилий и терпения, с нашей помощью сможет создать проект по сборке беспилотника (дрона), своими руками собрать его из подручных материалов, и запрограммировать его. Смотрите полезные видео вех этих процессов, читайте наши советы и рекомендации, и создавайте роботов самостоятельно своими руками!
Могли бы вы еще недавно себе представить, что сделать робота у себя дома самому будет в принципе возможно? И что это окажется так доступно и просто описано, что процесс сборки будет чем-то увлекательным и веселым? Сегодня мы докажем вам, что это просто. Все подробные инструкции, фото и видео материалы для создания квадрокоптеров / дронов / беспилотников и роботов вы найдете в разделе нашего сайта «Сделай сам».![]()
Заполните одно из полей на ваш выбор
Заполните одно из полей на ваш выбор
или
1
грн.
Оформить заказ
Добавить к заказу расходники для этого товара
Этот товар сохранится в корзине, Вы выберите необходимые для Вас расходники и аксессуары.
Продолжить покупки
Этот товар сохранится в корзине.
Если хотите связаться с нами:
Артикул товара:
(067) 103 90 70
(099) 103 90 70
(063) 103 90 70
Как сделать робота киборга из лего
Всегда приятно творить что нибудь своими руками. для этого, собственно, и придуман конструктор лего. Если вам вдруг захочется что то построить из этих замечательных деталек, но вы не будете знать что к как из них можно сделать, смело можете заглядывать в эту статью.Далее мы расскажем и покажем вам как из подручных материалов можно сделать настоящих (это не шутка) роботов. Мы дадим вам наглядные примеры, посмотрев на которые вы сможете в дальнейшем создавать и свои, более грандиозные проекты.
для этого, собственно, и придуман конструктор лего. Если вам вдруг захочется что то построить из этих замечательных деталек, но вы не будете знать что к как из них можно сделать, смело можете заглядывать в эту статью.Далее мы расскажем и покажем вам как из подручных материалов можно сделать настоящих (это не шутка) роботов. Мы дадим вам наглядные примеры, посмотрев на которые вы сможете в дальнейшем создавать и свои, более грандиозные проекты.
Ну что, поехали. Начнем с простого.
Киборг
Сперва мы попробуем сделать небольшого, около 10-15 сантиметров, человекоподобного робота. Для этого понадобятся кое какие нестандартные детали, но раз уж вы захотели сделать робота, то без них не обойтись.
Киборги — это человекообразные роботы, они владеют оружием и умеют постоять за себя.
Робот в тяжелой броне
По тренеровавшись на простой модели робота можно переходить к задаче по сложнее. Для этого вам понадобятся дополнительные детали. Если вы обратите внимание на наше видео, приложенное ниже, то скорее всего вы поймете как можно собрать более интересного робота чем наш первый опыт. Этот образец оснащен сразу несколькими оружиями, которые вмонтированы прямо в руки.
Для этого вам понадобятся дополнительные детали. Если вы обратите внимание на наше видео, приложенное ниже, то скорее всего вы поймете как можно собрать более интересного робота чем наш первый опыт. Этот образец оснащен сразу несколькими оружиями, которые вмонтированы прямо в руки.
Его броня покрашена в черный цвет, с использованием вставок желто-зеленого цвета.
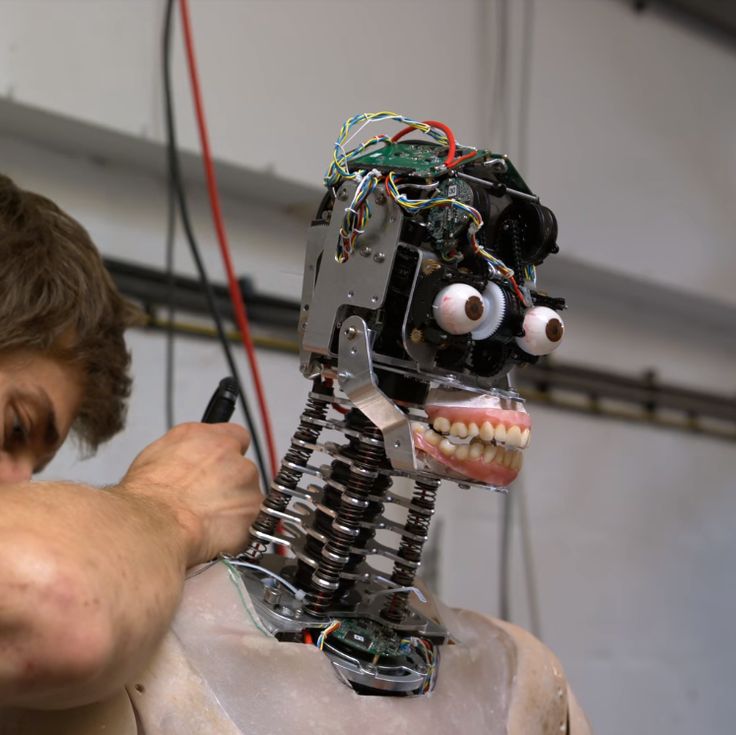
Скелет Терминатора
Этот пример является продуктом высшего класса. на создание этого робота ушло огромное количество не только деталек, но и труда.
Обратите внимание что все его конечности двигаются, а это значит что он не просто игрушка. Если вы не узнали в этих серых очертаниях терминатора, то это наверное потому, что в фильме этот металлический скелет обрел вид Арнольда Шварценеггера. Здесь же мы видит только чистый метал, ну или вернее пластик.
Более сложные модели вам поможет собирать конструктор лего миндсторм.Благодаря электромоторам и блокам дистанционного управления простор фантазии практически не ограничен. Вы сможете собрать любое устройство, не только робота и програмировать его выполнять различные действия.
вот что делают люди с помощью этого набора:
Робот-тренога:
Видео работы:
Робот созданный по образу тех монстров из книги и фильма «Война миров».
Как сделать этого робота: вы можете скачать инструкцию и программу для постройки модели.
Скачать
Двуногий робот
Видео работы:
Собрать его можно по инструкции из книги «создаём клевых роботов из Миндсторм»
Скачать книгу
Робот-мухоловка
Робот с огромной пастью, реагирует на движение и кусает нападающий объект.
Видео:
Что бы собрать робота можно воспользоваться инструкцией:
Скачать
Вот таких замечательных роботов можно собирать из конструктора лего, удачи в вашем творчестве.
Как работают роботы | Как работает
«»
R2-D2 (слева) и C-3PO на премьере фильма «Звездные войны: Пробуждение силы» в 2015 году в Голливуде, Калифорния. Для многих людей эти две цифры представляют, как выглядят роботы. Фрейзер Харрисон / Getty Images
На самом базовом уровне человек состоит из пяти основных компонентов:
- Структура тела
- Система мышц, обеспечивающая движение структуры тела
- Сенсорная система, которая получает информацию о теле и окружающей среде
- Источник питания для активации мышц и сенсоров
- Мозговая система, которая обрабатывает сенсорную информацию и сообщает мышцам, что делать физический уровень, приведенный выше список покрывает его.

Реклама
Робот состоит из тех же компонентов. Базовый типичный робот имеет подвижную физическую структуру, какой-то двигатель, сенсорную систему, источник питания и компьютерный «мозг», который управляет всеми этими элементами. По сути, роботы — это созданные человеком версии жизни животных — это машины, которые копируют поведение людей и животных.
Джозеф Энгельбергер, пионер в области промышленной робототехники, однажды заметил: «Я не знаю, как определить их, но я узнаю их, когда вижу!» Если вы рассмотрите все различные машины, которые люди называют роботами, вы увидите, что почти невозможно дать исчерпывающее определение. У всех разное представление о том, что представляет собой робот.
Вы, наверное, слышали о некоторых из этих известных роботов:
- R2-D2 и C-3PO: умные, говорящие роботы с большим количеством индивидуальностей из фильмов «Звездные войны»
- AIBO от Sony: роботизированная собака, которая учится через взаимодействие с человеком
- ASIMO от Honda: робот, который может ходить на двух ногах, как человек
- Промышленные роботы: автоматизированные машины, работающие на сборочных линиях человек-андроид из «Звездного пути»
- BattleBots: истребители с дистанционным управлением из долгоиграющего телешоу
- Роботы для обезвреживания бомб
- Марсоходы НАСА
- HAL: Корабельный компьютер в фильме Стэнли Кубрика «2001: Космическая одиссея»
- Roomba: робот-пылесос от iRobot
- Робот из телесериала «Затерянные в космосе»
- MINDSTORMS: популярный набор робототехники LEGO
Все эти вещи считаются роботами, по крайней мере, некоторые люди.
Но можно сказать, что большинство людей определяют робота как все, что они признают роботом. Большинство робототехников (людей, которые строят роботов) используют более точное определение. Они уточняют, что у роботов есть перепрограммируемый мозг (компьютер), который двигает тело.По этому определению роботы отличаются от других подвижных машин, таких как тягачи с прицепами, из-за их компьютерных элементов. Даже с учетом сложной бортовой электроники водитель управляет большинством элементов напрямую с помощью различных механических устройств. Роботы отличаются от обычных компьютеров своей физической природой — к обычным компьютерам не прикреплены физические тела.
В следующем разделе мы рассмотрим основные элементы большинства современных роботов.
Процитируйте это!
Пожалуйста, скопируйте/вставьте следующий текст, чтобы правильно цитировать эту статью HowStuffWorks.com:
Том Харрис и Крис Поллетт
«Как работают роботы»
16 апреля 2002 г.
HowStuffWorks.com.
25 октября 2022 г.Как строятся промышленные роботы? Руководство по компонентам и движению манипуляторов роботов| XYZ
Одинаковая ли структура роботов и людей?
Роботы и люди имеют общие черты. Люди и механические роботы — какими бы противоположными они ни казались, на самом деле они имеют одну и ту же базовую структуру звеньев (костей) и суставов. Основной скелет промышленных роботов, состоящий в основном из манипуляторов, представляет собой комбинацию звеньев и соединений. По отношению к человеческому телу части, которые могут свободно сгибаться и двигаться, такие как локоть и плечо, являются суставами, а кости, соединяющие эти суставы, эквивалентны звеньям робота. Принцип движения суставов и передачи энергии через звенья является общим как для людей, так и для роботов.
Локоть и плечо человека — это суставы, а соединяющие их кости — звенья.
Роботы можно условно разделить на два типа в зависимости от того, как устроены их соединения: 1) последовательное соединение и 2) параллельное соединение. Человеческая рука классифицируется как последовательное звено, поскольку ее суставы — плечо, рука и запястье — расположены последовательно.
Промышленные роботы подразделяются на несколько категорий, таких как вертикальный шарнирный тип и горизонтальный шарнирный тип (манипулятор робота с селективной податливостью SCARA), в зависимости от движений суставов и конструкции. Дополнительную информацию см. в статье ниже.
Какие виды промышленных роботов существуют? Руководство по характеристикам основных 6 типов
В этой статье будет объяснено движение и внутреннее устройство промышленных роботов.
Сравнение движений робота и человека
Теперь давайте в качестве примера рассмотрим движение вертикального сочлененного типа, имеющего ту же механическую структуру, что и человеческая рука.
Вертикально-шарнирный робот представляет собой промышленный робот со структурой последовательной связи.
Обычно он состоит из шести суставов (6 осей).На следующем рисунке показано сравнение движения робота и человека.
Оси с 1-й по 3-ю — это талия и рука, а оси с 4-й по 6-ю — от запястья до кончиков пальцев. Первые три оси переносят запястье в определенное положение, а следующие три оси свободно перемещают запястье. Эта 6-осевая конструкция позволяет роботам свободно двигаться, как и людям.
Давайте проверим реальные движения на видео.
Все оси, с первой по шестую, двигаются как человек.
Что нужно для движения суставов?
Далее давайте подробно рассмотрим внутреннюю структуру промышленных роботов.
На приведенном ниже рисунке показана конструкция универсального робота малой и средней полезной нагрузки серии R от Kawasaki Heavy Industries или Kawasaki. Эта серия R используется в широком диапазоне областей, таких как сборка электронных устройств и дуговая сварка.
Поскольку кабели и жгуты могут быть встроены внутрь манипулятора, можно избежать помех периферийному оборудованию, и робот может работать в небольшом пространстве. Его отличительной чертой является быстрая работа, которая может соответствовать проворным движениям.На этом рисунке видно, что робот состоит из множества разных частей. Среди этих частей четыре особенно важные: привод, редуктор, энкодер и трансмиссия, каждая из которых будет объяснена отдельно.
Привод
Привод — это компонент, выполняющий функции шарнира робота, который позволяет роботу перемещать руку вверх и вниз или вращаться, а также преобразовывать энергию в механические движения. Может быть трудно понять эту концепцию, но подумайте о двигателях в качестве примера. Точки, отмеченные красными кружками на рисунке ниже, являются положением двигателей серии R.
Однако, если это простой двигатель, такой как те, которые используются в комплектах пластиковых моделей, невозможно выполнить точную операцию, которая требует точных движений и точности, например, 0,01 мм.
Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью.Наиболее распространенным источником энергии для силовых приводов является электричество, но также может использоваться гидравлическая и пневматическая энергия. Некоторые приводы с гидравлическим приводом уникальны тем, что они могут генерировать большую мощность и устойчивы к ударам.
Редуктор
Редуктор — это устройство для увеличения мощности двигателя. Один только двигатель ограничен по мощности, которую он может выдавать. Для получения большой мощности двигатели в основном используются в сочетании с этим редуктором. Области, обведенные синим цветом на следующем рисунке, представляют собой редукторы.
Если объединить зубчатые колеса с разным количеством передач и уменьшить скорость вращения двигателя в 10 раз, мощность двигателя увеличится в 10 раз. Это тот же принцип, что и в велосипедной трансмиссии.
Велосипеды имеют разные по размеру шестерни на переднем и заднем колесе. Как правило, трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колеса сведено к минимуму, крутить педали становится легче за счет скорости, но даже ехать вверх по крутым склонам становится намного легче. Другими словами, выходная мощность может быть увеличена.Энкодер
Энкодер — это устройство, которое указывает положение (угол) вращающегося вала двигателя. Имея энкодер, он может предоставить осязаемые данные о том, в каком направлении и сколько движется робот. У обычных оптических энкодеров диск прикреплен к вращающемуся валу двигателя. Диск имеет прорези через равные промежутки времени для пропускания света, а по обеим сторонам диска расположены светоизлучающие диоды (СИД) и светоприемные элементы (фотодиоды) для различения интенсивности света (светлый и темный).
Когда двигатель вращается, свет либо проходит через щели, либо блокируется, поэтому угол поворота и скорость можно определить, считывая сигналы.
Это позволяет серводвигателям точно контролировать позиционирование и скорость.Трансмиссия
Трансмиссия — это компонент, передающий мощность, генерируемую исполнительными механизмами и редукторами. Трансмиссия также способна изменять направление и величину мощности. Как и прежде, рассматривая велосипед в качестве примера, цепь, соединяющая кривошип с задним колесом, является трансмиссией. Велосипеды приводятся в движение, принимая вращательное движение от педалей и передавая его на заднее колесо с помощью трансмиссии.
Эта идея также применима к конструкции робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов с помощью передаточных механизмов, таких как ремни и шестерни. Например, в запястье роботов серии R, поскольку двигатель может быть установлен на локтевой части руки с помощью проводящего механизма, возможно компактное запястье.
Добавление функций с помощью сменного концевого зажима
Люди могут выполнять различные задачи с помощью инструментов.
В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять различные работы. Это устройство называется «концевой эффектор», и существует множество готовых к использованию устройств, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, реализуемое валами роботов, и специальные концевые эффекторы.В этой статье была подробно описана базовая структура промышленных роботов, и из нее мы узнали о компонентах, из которых построена конструкция, — где они расположены и какую роль играют. Люди могут подумать, что нет необходимости знать или узнавать о том, как устроен робот, при рассмотрении вопроса о внедрении роботов на рабочем месте. Однако наличие общего обзора поможет понять, например, какие виды движений и работ возможны, если посмотреть на количество осей, которые есть у робота, или на то, как робот может использоваться в компании.

 Но можно сказать, что большинство людей определяют робота как все, что они признают роботом. Большинство робототехников (людей, которые строят роботов) используют более точное определение. Они уточняют, что у роботов есть перепрограммируемый мозг (компьютер), который двигает тело.
Но можно сказать, что большинство людей определяют робота как все, что они признают роботом. Большинство робототехников (людей, которые строят роботов) используют более точное определение. Они уточняют, что у роботов есть перепрограммируемый мозг (компьютер), который двигает тело.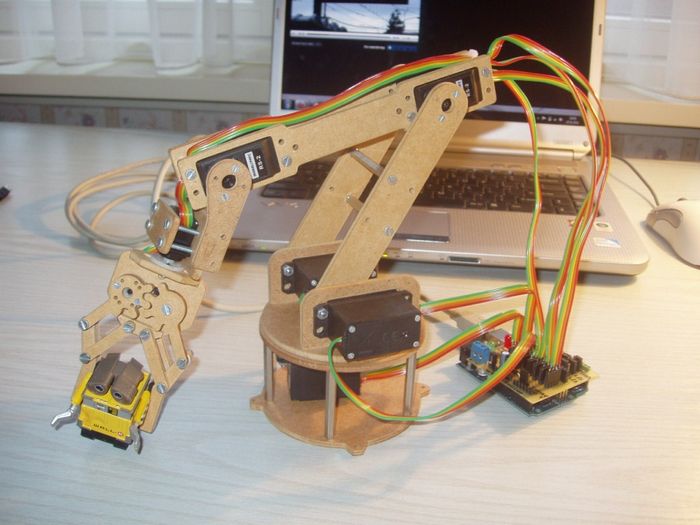
 Обычно он состоит из шести суставов (6 осей).
Обычно он состоит из шести суставов (6 осей). Поскольку кабели и жгуты могут быть встроены внутрь манипулятора, можно избежать помех периферийному оборудованию, и робот может работать в небольшом пространстве. Его отличительной чертой является быстрая работа, которая может соответствовать проворным движениям.
Поскольку кабели и жгуты могут быть встроены внутрь манипулятора, можно избежать помех периферийному оборудованию, и робот может работать в небольшом пространстве. Его отличительной чертой является быстрая работа, которая может соответствовать проворным движениям. Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью.
Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью. Велосипеды имеют разные по размеру шестерни на переднем и заднем колесе. Как правило, трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колеса сведено к минимуму, крутить педали становится легче за счет скорости, но даже ехать вверх по крутым склонам становится намного легче. Другими словами, выходная мощность может быть увеличена.
Велосипеды имеют разные по размеру шестерни на переднем и заднем колесе. Как правило, трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колеса сведено к минимуму, крутить педали становится легче за счет скорости, но даже ехать вверх по крутым склонам становится намного легче. Другими словами, выходная мощность может быть увеличена. Это позволяет серводвигателям точно контролировать позиционирование и скорость.
Это позволяет серводвигателям точно контролировать позиционирование и скорость. В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять различные работы. Это устройство называется «концевой эффектор», и существует множество готовых к использованию устройств, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, реализуемое валами роботов, и специальные концевые эффекторы.
В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять различные работы. Это устройство называется «концевой эффектор», и существует множество готовых к использованию устройств, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, реализуемое валами роботов, и специальные концевые эффекторы.