Содержание
Исследования Марса космическими аппаратами. Досье
5 мая 2018, 16:48
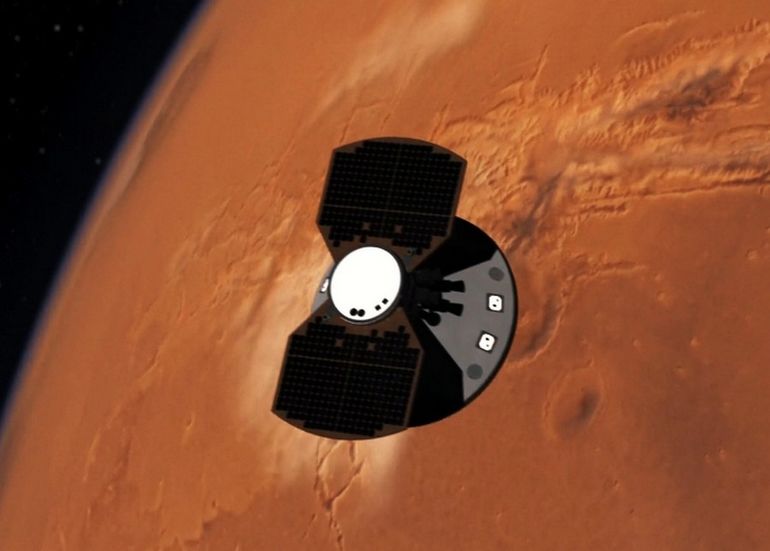
ТАСС-ДОСЬЕ. 5 мая США отправили на Марс межпланетный космический аппарат InSight с посадочным модулем. Его запуск был осуществлен ракетой-носителем Atlas V, стартовавшей с базы ВВС США Ванденберг (штат Калифорния). Редакция ТАСС-ДОСЬЕ подготовила справку о запусках к Марсу космических аппаратов.
Марс
Марс — четвертая от Солнца планета Солнечной системы, вращается по вытянутой (эллиптической) орбите. Свое название она получила в честь древнеримского бога войны. Часто Марс именуют Красной планетой из-за оттенка поверхности, вызванного высоким содержанием оксида железа.
Среднее расстояние Марса от Солнца составляет 227,9 млн км, период обращения вокруг него — 687 суток (вдвое больше земного). Средний радиус планеты — 3 тыс. 389,5 км (в 1,88 раз меньше земного — 6 тыс. 371 км), масса — 0,108 от земной. Сила притяжения на Марсе почти в три раза слабее земной. Период вращения вокруг своей оси равен примерно 24,5 земных суток. На Марсе, как и на Земле, происходит смена дня и ночи, а также сезонов.
На Марсе, как и на Земле, происходит смена дня и ночи, а также сезонов.
Марсианская атмосфера разряженная и в основном состоит из углекислого газа (порядка 95,3%), в малых количествах присутствуют азот (2,7%), аргон (1,6%) и кислород (0,13%). Температура на поверхности планеты колеблется от -153 (зимой) до +20 (летом) градусов Цельсия. Характерны резкие перепады температуры в течение суток: днем +20, ночью -90 градусов.
У Марса два естественных спутника: Фобос и Деймос.
Причины научного интереса
Марс относится к земной группе планет Солнечной системы (помимо него и Земли в нее входят также Венера и Меркурий). Среди этой группы Марс наиболее схож с Землей. В его атмосфере, пусть и в малом количестве, содержится кислород. Присутствует вода — в полярных шапках в виде льда (слишком низкое атмосферное давление не позволяет существовать воде на поверхности в жидком виде). На этой планете, как и на Земле, есть вулканы. На Марсе наблюдаются извилистые долины и углубления, похожие на русла рек. Такие образования могут быть связаны с водной и ледниковой эрозией и свидетельствовать о том, что несколько миллиардов лет назад эта планета имела более плотную атмосферу и гидросферу. При этом, в отличие от Венеры с ее очень плотной и ядовитой атмосферой, Марс является более перспективным небесным телом для поиска следов жизни и возможной колонизации в будущем.
Такие образования могут быть связаны с водной и ледниковой эрозией и свидетельствовать о том, что несколько миллиардов лет назад эта планета имела более плотную атмосферу и гидросферу. При этом, в отличие от Венеры с ее очень плотной и ядовитой атмосферой, Марс является более перспективным небесным телом для поиска следов жизни и возможной колонизации в будущем.
Отправка на Марс космических аппаратов сопряжена с трудностями: расстояние между Землей и Марсом колеблется от 55 млн км (когда обе планеты находятся по одну сторону от Солнца) до 400 млн км (когда Солнце находится между ними). Наиболее удобное время для запуска наступает во время сближения планет. Такие периоды происходят примерно раз в два года и длятся около трех месяцев. В предыдущий раз планеты сближались весной 2016 года (расстояние между ними составило 75,3 млн км). По состоянию на 5 мая между планетами 120 млн км.
Миссии к Марсу
Первым попытку запуска к Марсу предпринял в 1960 году Советский Союз. В рамках программы «Марсник» (от «Марс» и «Спутник») планировалось исследовать планету двумя зондами во время ее облета. Запуск аппаратов «Марс 1969А» и «Марс 1969Б» был проведен с Байконура 10 и 14 октября 1960 года. Однако оба были потеряны из-за аварий ракеты-носителя «Молния».
Запуск аппаратов «Марс 1969А» и «Марс 1969Б» был проведен с Байконура 10 и 14 октября 1960 года. Однако оба были потеряны из-за аварий ракеты-носителя «Молния».
Первым аппаратом, пролетевшим рядом с планетой, стала советская автоматическая межпланетная станция «Марс-1» (запущена в 1962 году). По расчетам, 19 июня 1963 года она прошла на расстоянии 193 тыс. км от планеты. Однако миссия потерпела неудачу, так как связь с АМС прервалась еще до подлета к Красной планете.
Впервые фотографии марсианской поверхности были получены в 1965 году с американского зонда Mariner 4 (1964). 15 июля, облетая Марс, он подошел к планете на расстояние 9 тыс. 846 км.
Первым искусственным спутником Марса стал американский Mariner 9 (1971). Космический аппарат добрался до планеты 14 ноября 1971 года и почти год проводил исследования с ее орбиты. Mariner 9 впервые с близкого расстояния сфотографировал спутники Марса.
Первым аппаратом, достигшим поверхности планеты, стал 27 ноября 1971 года посадочный модуль советской АМС «Марс-2» (1971).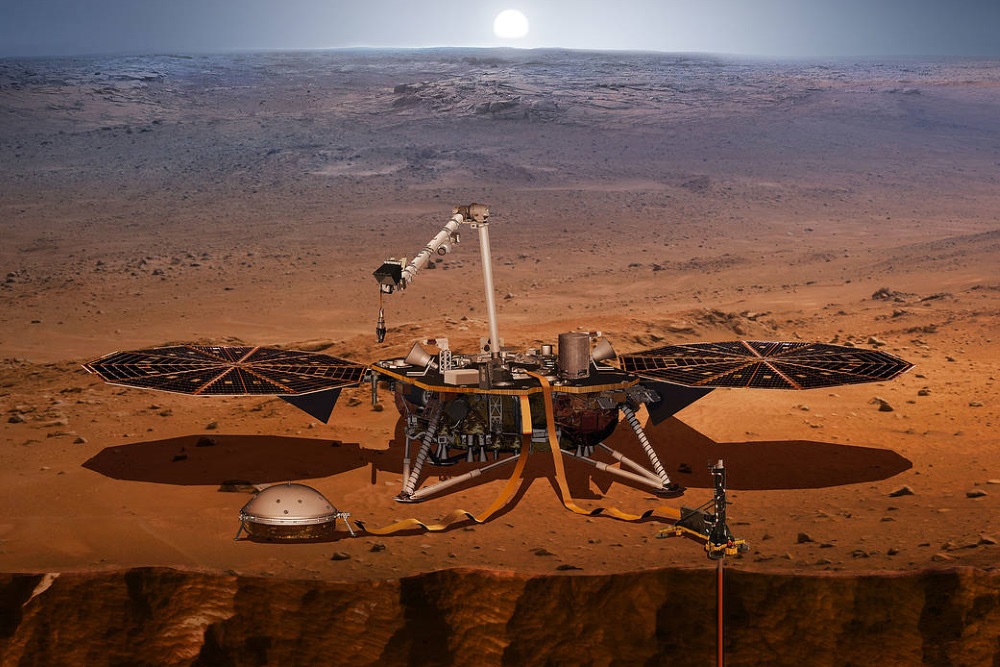 На Марс планировалось спустить самоходный аппарат, который назывался «Прибор оценки проходимости — Марс» (ПрОП-М). Однако марсоход, на борту которого находился вымпел с изображением герба СССР, разбился при посадке.
На Марс планировалось спустить самоходный аппарат, который назывался «Прибор оценки проходимости — Марс» (ПрОП-М). Однако марсоход, на борту которого находился вымпел с изображением герба СССР, разбился при посадке.
Впервые мягкую посадку 2 декабря 1971 года удалось осуществить советскому «Марсу-3» (1971), который был идентичен предыдущему аппарату. Однако и второй советский марсоход был потерян, связь с ним прервалась спустя 14,5 сек. после начала работы из-за пылевой бури.
Первыми аппаратами, предназначенными для исследования одного из спутников Марса, были советские «Фобос-1» и «Фобос-2» — запущены 7 и 12 июля 1988 года соответственно. В проекте участвовали также ученые ряда европейских стран. С первым аппаратом была потеряна связь на пути к Марсу, второму удалось передать 37 изображений Фобоса.
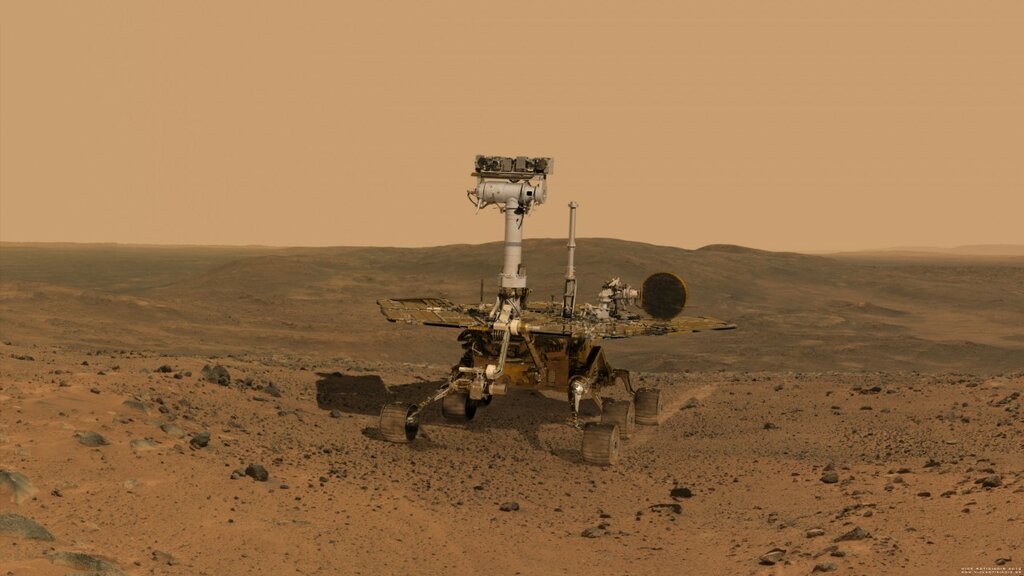
Первую успешную миссию марсохода удалось осуществить США. Sojourner (1996) был спущен на поверхность Марса 4 июля 1997 года. Он проработал около трех месяцев и преодолел расстояние почти 100 м, передал 550 фотографий и проанализировал 15 химических проб с поверхности. Всего на Марсе работали четыре марсохода — все американские. В 2010 году завершил свою миссию Spirit. До сих пор функционируют Opportunity (с января 2004 года) и Curiosity (с августа 2012 года).
Всего на Марсе работали четыре марсохода — все американские. В 2010 году завершил свою миссию Spirit. До сих пор функционируют Opportunity (с января 2004 года) и Curiosity (с августа 2012 года).
В настоящее время с орбиты планеты ведут исследования шесть земных космических аппаратов. Среди них три американских: Mars Odyssey (с октября 2001 года), Mars Reconnaissance Orbiter (MRO; с марта 2006 года), MAVEN (с сентября 2014 года). А также европейский Mars Express (с декабря 2003 года) и индийский «Мангальян-1» (с сентября 2014 года). В 2018 году к ним присоединился орбитальный модуль TGO российско-европейской миссии ExoMars-2016, который после завершения серии сложных маневров занял в начале апреля свою рабочую орбиту.
Всего за всю историю освоения космического пространства к 5 мая 2018 года с Земли к Марсу было отправлено 44 миссии автоматических космических аппаратов разных стран. Из них 16 миссий — успешные, семь — частично успешные, 21 миссия потерпела неудачу. По 20 миссий на счету США (15 успешных и пять неудачных) и СССР/России (шесть частично успешных, включая совместный с Европейским космическим агентством, ЕКА, проект ExoMars-2016, и 14 неудачных).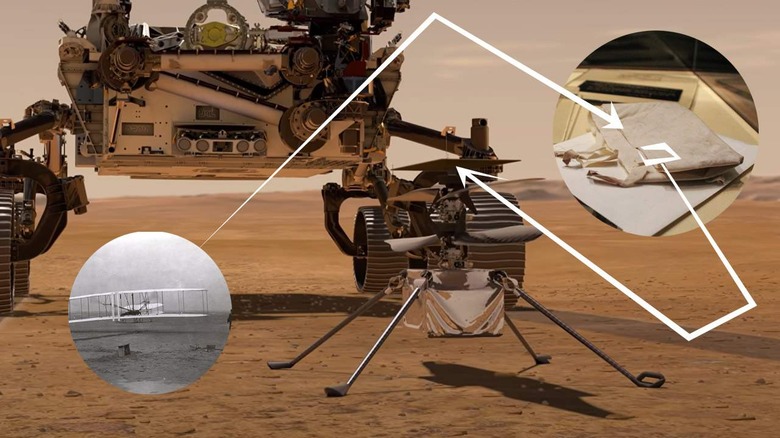 У ЕКА — две частично успешных миссии, в том числе ExoMars-2016 (совместно с Россией). По одной миссии у Индии (успешная), Китая (неудачная) и Японии (неудачная).
У ЕКА — две частично успешных миссии, в том числе ExoMars-2016 (совместно с Россией). По одной миссии у Индии (успешная), Китая (неудачная) и Японии (неудачная).
Дальнейшие планы
На 2020 год, когда будет очередное сближение нашей планеты с Марсом, запланировано несколько миссий разных стран:
- начнется второй этап российско-европейского проекта ExoMars, предусматривающий доставку на поверхность планеты спускаемого модуля с посадочной платформой и автономным марсоходом Pasteur;
- США собираются запустить пятый планетоход — Mars 2020 Rover;
- Индия намеревается отправить к Красной планете второй зонд «Мангальян-2»;
- Китай планирует осуществить миссию, включающую исследование Марса с помощью орбитального аппарата и марсохода;
- Объединенные Арабские Эмираты (ОАЭ) совместно с США готовятся отправить к планете свой первый аппарат Mars Hope.
В 2022 году может состояться запуск японской автоматической станции с целью доставки грунта со спутников Марса — Фобоса и Деймоса (в рамках проекта Phobos/Dеimos Sample Rеturn). В 2024 году Россия собирается повторить попытку по забору образцов вещества с Фобоса (проект «Бумеранг»/»Экспедиция-М»), предыдущая подобная миссия («Фобос-Грунт») потерпела неудачу в 2011 году.
В 2024 году Россия собирается повторить попытку по забору образцов вещества с Фобоса (проект «Бумеранг»/»Экспедиция-М»), предыдущая подобная миссия («Фобос-Грунт») потерпела неудачу в 2011 году.
Кроме того, в планы входит осуществление полета человека на Марс. Пилотируемые марсианские миссии рассматривается космическими ведомствами России (может быть осуществлен не ранее 2030 года) и США (к 2030 году), а также ЕКА (до 2033 года). В феврале 2017 года власти ОАЭ объявили о проекте строительства первого мини-города на Красной планете — «Марс 2117» — в сотрудничестве с ведущими международными организациями и научно-исследовательскими институтами. Существуют также частные инициативы по пилотируемым миссиям на Красную планету.
Марсоход Curiosity приступил к исследованию Марса
«После удивительного путешествия в 154 миллиона миль (почти 250 миллионов километров) и непростой посадки, продемонстрировавшей самые современные технологии, Curiosity, самый большой планетоход, прибыл на место и готов к работе», — сообщил глава НАСА Чарльз Болден. Он напомнил, что цель работы марсохода дать ответ на вопрос, издревле волновавший человечество: возможна ли жизнь на Марсе. Поэтому местом посадки выбрали кратер Гейла.
Он напомнил, что цель работы марсохода дать ответ на вопрос, издревле волновавший человечество: возможна ли жизнь на Марсе. Поэтому местом посадки выбрали кратер Гейла.
Ученые полагают, что тут когда-то могло бушевать марсианское море. На планетоходе размещено десять научных приборов, включая российский ДАН (Динамическое альбедо нейтронов).
Экспедиция Curiosity к Марсу началась 26 ноября прошлого года стартом с космодрома на мысе Канаверал. Как планируется, марсоход в течение примерно одного марсианского года (687 земных дней) будет исследовать кратер Гейла. Это очень сложная миссия, поэтому включать аппаратуру планетохода будут постепенно. Полномасштабные исследования начнутся примерно через месяц. Curiosity, двигающийся на трех парах колес, оснащен атомной силовой установкой, которая может снабжать его энергией в течение 14 лет. Так что ровер может оказаться марсианским «долгожителем».
Болден напомнил, что миссия Curiosuty стала шагом на пути к поставленной президентом Бараком Обамой цели — посылке на Красную планету астронавтов. Глава государства оценил работу НАСА очень высоко. «Сегодня на Марсе США вошли в историю», — заявил он. Обама подчеркнул: это достижение показывает необходимость инвестировать средства в инновации, технологии и фундаментальные исследования. Он поздравил всех сотрудников НАСА и заявил, что с нетерпением ждет открытий, которые совершит Curiosity.
Глава государства оценил работу НАСА очень высоко. «Сегодня на Марсе США вошли в историю», — заявил он. Обама подчеркнул: это достижение показывает необходимость инвестировать средства в инновации, технологии и фундаментальные исследования. Он поздравил всех сотрудников НАСА и заявил, что с нетерпением ждет открытий, которые совершит Curiosity.
Ждать, судя по всему, долго не придется. Сразу после посадки, проведенной с прямо-таки ювелирной точностью, аппарат стал отсылать снимки поверхности Красной планеты на Землю — в Лабораторию реактивного движения НАСА в калифорнийской Пасадене. Правда, первую панораму места посадки планируется снять только завтра.
Миссия Curiosity стала одной из самых дорогостоящих за всю историю изучения американцами Марса: на разработку и запуск исследовательской лаборатории ушло 2,5 миллиарда долларов. При этом, как не без юмора напомнил глава НАСА, эти средства были потрачены не на Марсе, а на Земле, что позволило создать семь тысяч рабочих мест в 31 штате. Болден рассказал и о новых американских космических разработках. В частности, Болден отметил, что испытательный полет пилотируемого космического корабля Orion намечен на 2014 год. А в 2017 году его можно будет запустить с помощью ракеты-носителя SLS. Orion можно будет выводить не только на околоземную орбиту, но и за ее пределы. Американцы планируют вернуться на Луну в 2020 году и отправиться к Марсу в 2030-м.
Болден рассказал и о новых американских космических разработках. В частности, Болден отметил, что испытательный полет пилотируемого космического корабля Orion намечен на 2014 год. А в 2017 году его можно будет запустить с помощью ракеты-носителя SLS. Orion можно будет выводить не только на околоземную орбиту, но и за ее пределы. Американцы планируют вернуться на Луну в 2020 году и отправиться к Марсу в 2030-м.
Как у нас
C1960-х годов исследованием Марса занимались автоматические межпланетные станции СССР и России (программы «Марс» и «Фобос»), ЕКА и США(программы «Маринер», «Викинг», «Mars Global Surveyor» и другие). Полностью успешными были восемь миссий. Еще столько же — частично успешными. Не удались — двадцать. Последняя неудача: российский космический аппарат «Фобос-Грунт» не смог покинуть земную орбиту из-за несрабатывания разгонного блока. 15 января 2012 года он разрушился и сгорел в плотных слоях земной атмосферы. Из интервью «РГ» с генеральным директором и генеральным конструктором НПО им. С.А. Лавочкина Виктором Хартовым:
С.А. Лавочкина Виктором Хартовым:
Что вы думаете о полете на Марс? Некоторые эксперты утверждают, что именно он может стать запасной планетой для человечества.
Виктор Хартов: Не станет. Не те условия. Но лететь туда надо. Вообще, на мой взгляд, у научного космоса две важнейшие задачи. Первая — понять законы развития Солнечной системы. Почему, скажем, ближайшие соседи Земли — Марс и Венера, с одной стороны, ад песчаный, с другой — ад кислотный. Огромный интерес представляют спутники Юпитера. Но чтобы понять законы развития планет, надо иметь к ним доступ. Прежде всего нужно отправлять туда автоматы. Сейчас идет речь об участии России в европейском проекте «ЭкзоМарс». Первый полет намечен на 2016 год, второй — на 2018-й. Каким может быть российский вклад? Это ряд научных приборов, а также возможно наше участие в посадочном модуле. Поначалу европейцы планировали очень короткое время работы модуля-демонстратора на поверхности Марса. Но мы предложили усложнить конструкцию: установить элементы системы электропитания и радиоизотопный термоэлектрический генератор. «
«
Марсоход-рекордсмен
Специалисты НАСА уже получили несколько черно-белых снимков поверхности планеты. На них хорошо видна тень Curiosity, а значит марсоход цел и невредим. За «семь минут ужаса» аппарат преодолел розовую атмосферу Марса, войдя в нее на скорости около 20 тысяч километров в час. Завершающий этап посадки напоминал эпизод фантастического кинофильма: ровер спустили на 20-метровых тросах с платформы, которая удерживалась над поверхностью планеты с помощью реактивных двигателей. Драматическая операция прошла штатно, и в Лаборатории реактивного движения раздались бурные аплодисменты. В НАСА подчеркивают, что технология «небесного крана» использовалась впервые. Два предшественника Curiosity десантировались на Марс в 2004 году с помощью защитных воздушных подушек.
Путешествие на Марс заняло более восьми месяцев. За это время перелетный аппарат преодолел около 570 миллионов километров. Стоимость Curiosity тоже астрономическая — около 2,5 миллиарда долларов — это самая дорогостоящая миссия за всю историю освоения американцами Красной планеты.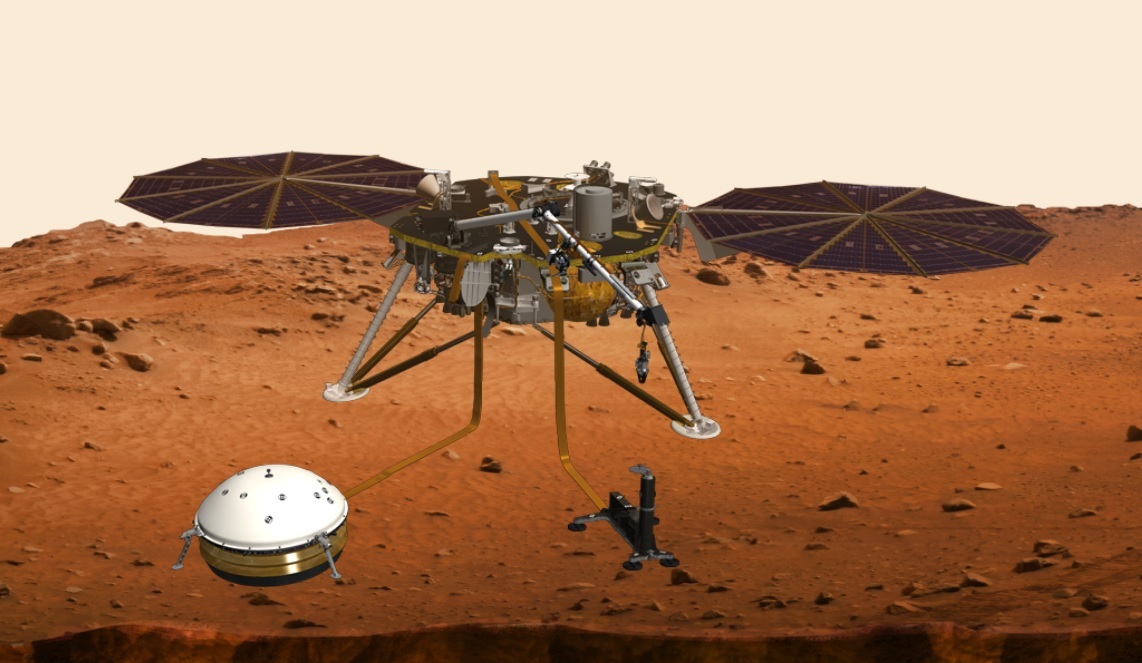 Шестиколесный ровер является не только самым дорогим, но и самым тяжелым. Он весит около тонны и достигает 2,8 метра в длину.
Шестиколесный ровер является не только самым дорогим, но и самым тяжелым. Он весит около тонны и достигает 2,8 метра в длину.
Теперь, как надеются ученые, Curiosity приступит к работе в кратере Гейла. Марсоход на атомной тяге гружен десятком научных приборов, включая российский детектор ДАН (Динамическое альбедо нейтронов), разработанный в Лаборатории космической гамма-спектроскопии Института космических исследований (ИКИ) РАН. Прибор предназначен для измерения содержания воды непосредственно под поверхностью грунта Красной планеты.
Подготовил Александр Сотов
Роботизированная рука — NASA Mars
Перейти к основному содержанию
- Космический корабль
› Ровер
- Резюме
- Кузов
- Мозги
- Камеры
- Микрофоны
- Колеса
- Рука
- Обращение с образцами
- Мощность
- Связь
- Маркировка
Роботизированная рука Mars 2020
7-футовая роботизированная рука на Perseverance может двигаться так же, как и ваша.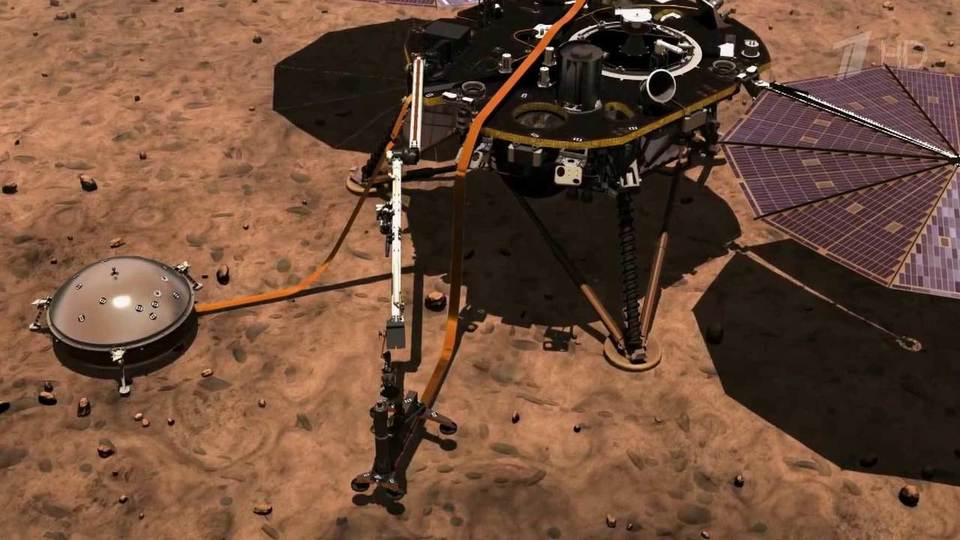 Он имеет плечевые, локтевые и лучезапястные «суставы» для максимальной гибкости. Рука позволяет марсоходу работать так же, как человек-геолог: удерживая и используя научные инструменты своей «рукой» или турелью. Собственные «ручные инструменты» марсохода извлекают ядра из горных пород, делают микроскопические изображения и анализируют элементный и минеральный состав марсианских горных пород и почвы.
Он имеет плечевые, локтевые и лучезапястные «суставы» для максимальной гибкости. Рука позволяет марсоходу работать так же, как человек-геолог: удерживая и используя научные инструменты своей «рукой» или турелью. Собственные «ручные инструменты» марсохода извлекают ядра из горных пород, делают микроскопические изображения и анализируют элементный и минеральный состав марсианских горных пород и почвы.
Технические характеристики
- Длина 7 футов (2,1 метра)
- Степеней свободы Всего пять. Это стало возможным благодаря крошечным двигателям, называемым «вращающимися приводами». Пять степеней свободы известны как плечевой азимутальный сустав, плечевой сустав по высоте, локтевой сустав, лучезапястный сустав и револьверный сустав.
- «Ручная» турель На конце руки находится «турель». Это похоже на руку, которая держит научные камеры, минеральные и химические анализаторы для изучения прошлой обитаемости Марса и выбора наиболее ценного с научной точки зрения образца для кэширования.

- Названия инструментов на турели SHERLOC и WATSON, PIXL, GDRT (инструмент для удаления газообразной пыли), датчик контакта с землей, дрель
- Бур Бур представляет собой роторно-ударный бур, предназначенный для извлечения образцов горных пород с поверхности Марса.
- Буровые долота Набор сменных долот: буровые долота, долота для реголита и абразивный инструмент.
- Основная функция Помощь в исследовании поверхности Марса и сборе проб
- Диаметр просверленных отверстий 1 дюйм (27 мм)
Бур
Бур марсохода будет использовать вращательное движение с ударом или без него, чтобы проникнуть в поверхность Марса и собрать драгоценные образцы. Бур оснащен тремя различными типами насадок (бит), которые облегчают сбор проб и анализ поверхности. Долота для отбора керна и реголита используются для сбора марсианских образцов непосредственно в чистую трубку для сбора образцов, а долото для абразива используется для соскабливания или «шлифовки» верхних слоев горных пород, чтобы обнажить свежие, не выветрившиеся поверхности для изучения.
Типы образцов горных пород, которые будет собирать бур
Образцы горных пород
Цилиндрический бур вырезает образцы из внутренней части скалы, отламывая образец скалы у его основания. Каждый образец собирается непосредственно в чистую пробирку для сбора образцов. Пробирки для проб имеют размер фонарика. Каждое собранное ядро имеет диаметр 0,5 дюйма (13 миллиметров) и длину 2,4 дюйма (60 миллиметров), что составляет в среднем 10-15 граммов марсианского материала на трубку.Образцы «реголита»
Специальное сверло используется для сбора рыхлого скального материала, или «реголита», на поверхности Марса. Как и в случае с образцами горных пород, образцы реголита собираются непосредственно в чистую пробирку для сбора образцов.
Оборудование для отбора проб на «руке» (турели)
На конце руки находится «турель». Это похоже на руку, которая держит научные камеры, минеральные и химические анализаторы для изучения прошлой обитаемости Марса и выбора наиболее ценного с научной точки зрения образца для кэширования. На башне установлены научные инструменты:
На башне установлены научные инструменты:
SHERLOC и WATSON
SHERLOC предназначен для изучения полезных ископаемых с близкого расстояния, поэтому он установлен на башне, где его можно разместить рядом с целями. SHERLOC использует спектрометры, лазер и камеру для поиска органических веществ и минералов, которые были изменены водной средой и могут быть признаками прошлой микробной жизни.У ШЕРЛОКА есть помощник. Камера WATSON также крепится на «руке». Она похожа на ручную линзу геолога, увеличивая и записывая текстуры горных пород и почвенных объектов, которые изучаются анализатором минералов SHERLOC. Его расположение на подвижной башне робота-манипулятора означает, что WATSON можно разместить рядом с целями в пределах досягаемости руки. WATSON также является неотъемлемым «помощником» камеры SHERLOC и PIXL. WATSON также обеспечивает ценные изображения систем марсохода, таких как колеса и инструменты, установленные низко на марсоходе, вне поля зрения Mastcam-Z.
ПИКСЛ
PIXL установлен на турели, потому что он должен иметь возможность приближаться к своим минеральным целям. Он способен обнаруживать признаки прошлой жизни. PIXL ищет изменения в текстурах и химических веществах в марсианских породах и почве, оставленных какой-либо древней микробной жизнью. PIXL изучит возможные образцы образцов-кандидатов. Собранная информация будет использоваться для определения наиболее интересных с научной точки зрения целей.
Датчик контакта с землей
В турели есть специальный датчик для защиты от повреждений, если рука соприкасается с поверхностью. Контактный датчик сигнализирует марсоходу об остановке, если он непреднамеренно коснется земли.
Обращение с образцами
Perseverance возьмет образцы марсианских пород и почвы. С помощью своего бура марсоход будет собирать и хранить ядра в трубах на поверхности Марса.
Как НАСА ремонтирует оборудование на Марсе?
Марс находится на расстоянии 33,9 миллиона миль от Земли.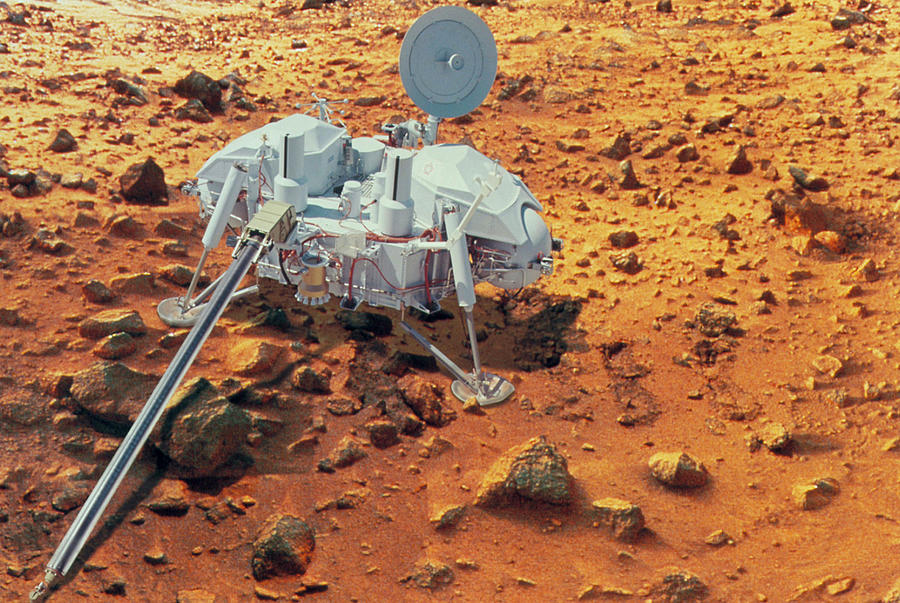 Путешествие между двумя планетами занимает месяцы, а это значит, что все компоненты миссии должны продолжаться.
Путешествие между двумя планетами занимает месяцы, а это значит, что все компоненты миссии должны продолжаться.
В то время как НАСА использует роботизированные посадочные модули и инструменты для изучения Марса до его исследования человеком, у роботов есть свои проблемы.
На Земле вы можете отнести свой сломанный компьютер в техподдержку для ремонта. Но что делает НАСА, когда его инструменты нуждаются в ремонте? Они, конечно, не могут отправить других роботов или людей для ремонта.
Недавний ремонт НАСА посадочного модуля InSight дает нам хорошее представление о мире дистанционного ремонта. Это часто требует творческого подхода и большой осторожности, поскольку ученым приходится использовать инструменты непроверенными способами.
HP3 и посадочный модуль InSight
Посадочный модуль InSight находится на Марсе с ноября 2018 года. Посадочный модуль предназначен для изучения состава, атмосферы и геологии Марса.
Однако всего через несколько месяцев после приземления на Красную планету InSight столкнулся с проблемой в одном из своих инструментов, которая потребовала ремонта.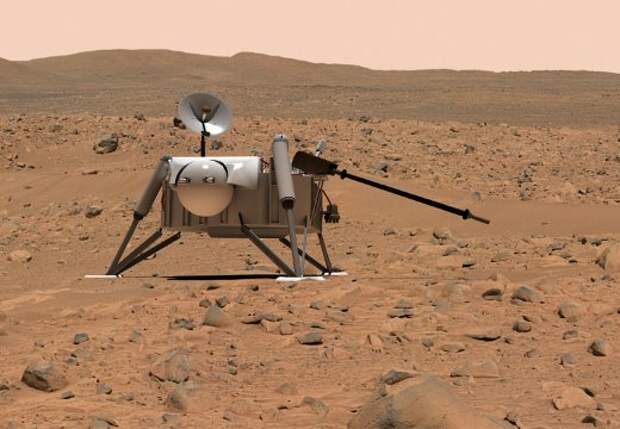
На борту посадочного модуля InSight находится прибор «Тепловой поток и физические свойства» (HP3). Этот прибор измеряет, как тепло течет из недр Марса на поверхность планеты.
У HP3 есть зонд под названием «крот», который используется для бурения поверхности Марса. Крот может закапываться на глубину до 16 футов под поверхность, где он проверяет теплопроводность марсианского грунта.
Проблема
Крот HP3 был разработан для бурения до 16 футов в почву, но в феврале 2019 года инструмент наткнулся на загвоздку. Когда крот вылезал из своего гнезда, он застрял всего в одном футе от поверхности.
Крот застрял там с февраля, и ситуация вызывает недоумение у ученых НАСА.
Ремонт родинки HP3
В марте НАСА использовало тепловой зонд HP3 для анализа сейсмической активности вокруг InSight.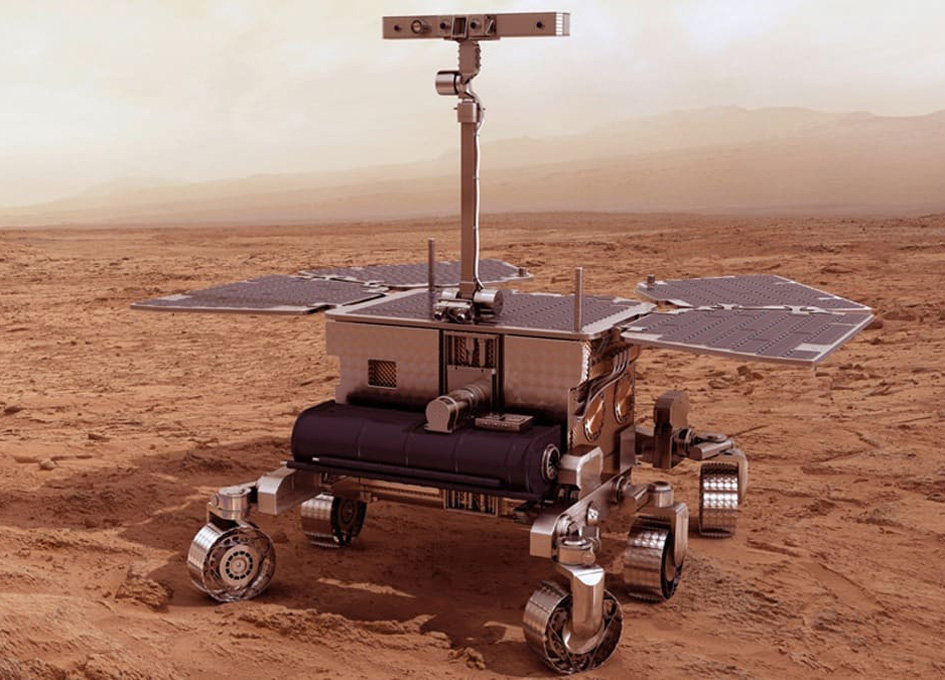 InSight забил землю молотком, и ученые использовали сейсмометр, чтобы «прослушать» почву в надежде решить проблему.
InSight забил землю молотком, и ученые использовали сейсмометр, чтобы «прослушать» почву в надежде решить проблему.
Изучив данные, ученые выдвинули гипотезу о недостаточном трении в песчаной почве под InSight. Без трения крот подпрыгивает на месте и не может сверлить.
Но это не просто вопрос перемещения крота в другое место. Крот не предназначен для перемещения, и если он вылезет из-под земли, его нельзя будет использовать снова. Вместо этого НАСА планирует использовать роботизированную руку InSight для устранения неполадок крота.
Однако это рискованный шаг. Рука была разработана для размещения инструментов на поверхности Марса, а не для захвата и перемещения других инструментов.
InSight осторожно переместит опорную конструкцию HP3, чтобы ученые могли увидеть родинку на камерах InSight. Ученые планируют двигаться очень осторожно, избегая повреждения инструментов или самого посадочного модуля. Они планируют поднять корпус HP3 в три этапа в течение недели.