Содержание
Какими бывают промышленные роботы? Шесть основных типов.
Содержание:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.

Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват.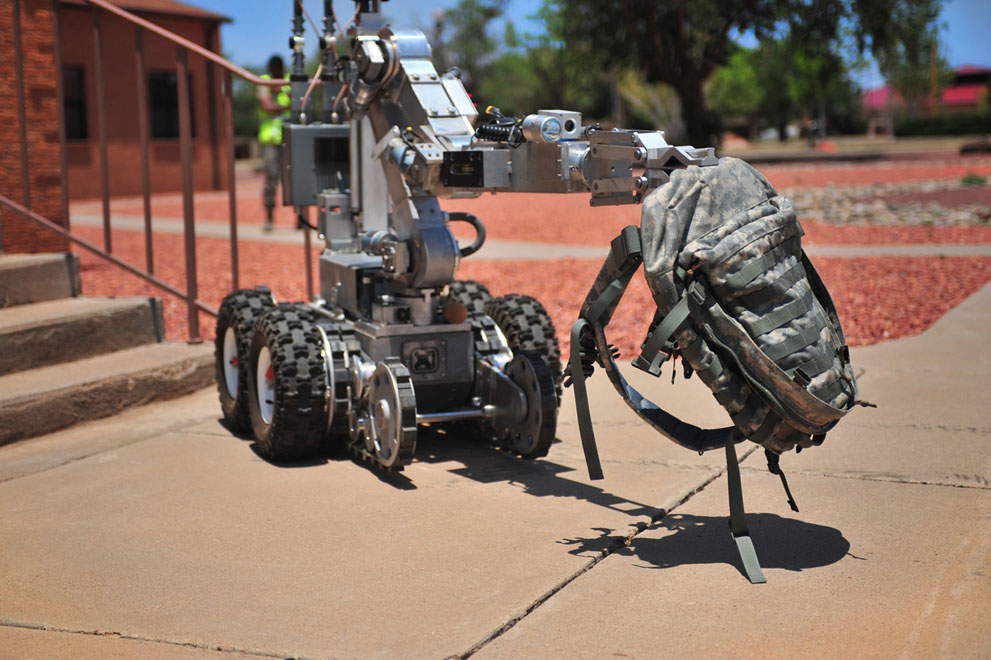 Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот
Kawasaki-Unimate 2000 выпущенный в 1969 году
Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.
На фото робот Kawasaki TL420
для работы с жидкокристаллической стеклянной подложкой.
Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
Линейный робот (Декартов робот) (Cartesian robot)
.
Простой в управлении.
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
На фото универсальный робот Kawasaki CX210L
с грузоподъемностью 210 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.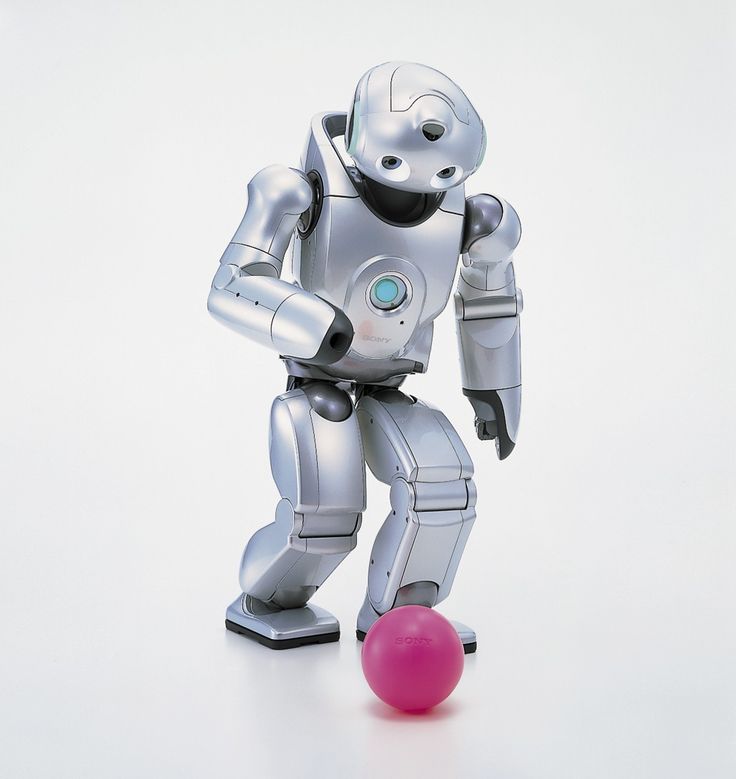
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
Сборщик
На фото двурукий робот Kawasaki duAro1
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
 com/embed/nAUSMmmQo2o» frameborder=»0″ allowfullscreen=»allowfullscreen»>
com/embed/nAUSMmmQo2o» frameborder=»0″ allowfullscreen=»allowfullscreen»>
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами. В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
Если вы хотите обсудить, какой тип роботов лучше всего подходит для вашей конкретной задачи, свяжитесь с нами по телефону 8(812)209-11-03 или по адресу [email protected]
Навигация по статье:
- Вступление
- Типы роботов
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот, Cartesian robot)
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Датчики роботов.
 Как выбрать и какие бывают датчики, сенсоры.
Как выбрать и какие бывают датчики, сенсоры.
Содержание
- Датчики роботов
- Что могут чувствовать люди, но не могут чувствовать роботы?
- Что могут чувствовать роботы, но не могут чувствовать люди?
- Какие датчики необходимы для вашего робота?
- Контактные датчики
- — Кнопка / контактный выключатель.
- — Датчики измерения давления
- Дистанционные датчики
- — Ультразвуковые датчики
- — Инфракрасные датчики
- — Лазер
- — Энкодеры
- — Линейный потенциометр
- — Датчики растяжения и изгиба
- — Стереокамера
- Датчики позиционирования
- — Локализация в помещении (навигация в комнате)
- — GPS
- Датчики вращения
- — Потенциометр
- — Гироскоп
- — Энкодеры
- Датчики роботов, реагирующие на условия окружающей среды
- — Датчик света
- — Датчик звука
- — Температурные датчики
- — Тепловизионная камера
- — Датчики измерения влажности
- — Барометрический датчик давления
- — Датчики газа
- — Магнитометры
- Датчики, использующие вращение
- — Компас
- — Гироскоп
- — Акселерометры
- — ИИБ
- И другие
- — Датчики тока и напряжения
- — Магнитные датчики
- — Датчики вибрации
- — Технологии RFID
- Практическая часть
- Движение по линии
Датчики роботов
В отличие от человека, роботы не ограничены только зрением, слухом, осязанием, обонянием и вкусом. Датчики роботов бывают разных типов. В первую очередь роботы используют различные электромеханические датчики, чтобы исследовать и понять окружающий мир и самих себя.
Датчики роботов бывают разных типов. В первую очередь роботы используют различные электромеханические датчики, чтобы исследовать и понять окружающий мир и самих себя.
Воспроизвести органы чувств живого существа в данный момент очень сложно. Из-за этого исследователи и разработчики прибегают к альтернативам биологических чувств.
что могут датчики
Что могут чувствовать люди, но не могут чувствовать роботы?
При помощи камер роботы могут “видеть”, но испытывают трудности с понимание того, что они видят. Робот может получить с камеры изображение, состоящее из миллионов пикселей. Но без сложного программирования, он не будет знать, что любой из этих точек обозначает.
Датчики расстояния указывают расстояние до объекта, но нужно, чтобы робот не врезался в препятствие или объект. Исследователи и компании экспериментируют с различными подходами к датчикам роботов. Дополнительно разрабатываются датчики, которые позволяет роботу не только “видеть” но “понимать” что он видит.
Исследователи и компании экспериментируют с различными подходами к датчикам роботов. Дополнительно разрабатываются датчики, которые позволяет роботу не только “видеть” но “понимать” что он видит.
Это может занять длительное время, прежде чем робот сможет различить объекты, расположенные перед ним на столе. Особенно если они расположены не так как в базе данных объектов.
Роботы очень плохо различают то, что связано со вкусом или обонянием.
Человек может сказать вам, “это является на вкус сладким” или “это плохо пахнет”, в то время как роботу необходимо провести анализ химического состава. Затем нужно искать вещества в базе данных, чтобы определить, что у человека отмечено на вкус как “сладкое” или на запах как “плохой”.
Такие датчики роботов как датчики вкуса и обоняния разрабатывались мало. В первую очередь потому что не было большого спроса на робота, который может различать вкус или запах.
Люди имеют множество нервных окончаний на всей своей коже, и мы знаем, когда мы дотронулись до какого-либо предмета или что-то коснулось нас. Роботы оборудованы кнопками или простыми контактами, размещенными в стратегически важных местах. Например, на переднем бампере, чтобы определить, вступает ли он в контакт с объектом.
Роботы оборудованы кнопками или простыми контактами, размещенными в стратегически важных местах. Например, на переднем бампере, чтобы определить, вступает ли он в контакт с объектом.
Роботы типа «домашние животные» могут иметь контакты или группу датчиков, расположенных на голове, ногах или спине, но если вы попытаетесь прикоснуться к зоне, где нет датчика, робот не поймет, что его касались, и не будет реагировать. Поскольку исследования в области гуманоидных роботов продолжаются, возможно, такие датчики роботов как “электромеханическая кожа” будет развиваться.
Что могут чувствовать роботы, но не могут чувствовать люди?
Робот не может сказать вам приятное на вкус или запах вещество. Хотя этапы анализа химического состава могут дать ему гораздо больше информации, чем нормальный человек может знать о его свойствах. Если робот оснащен датчиком окиси углерода, то он будет в состоянии обнаружить угарный газ.
Это повысит безопасность так как угарный газ не имеет цвета и запаха для человека. Робот также будет в состоянии сказать вам уровень рН вещества. Следовательно может определить, она кислая или щелочная, и многое, многое другое.
Робот также будет в состоянии сказать вам уровень рН вещества. Следовательно может определить, она кислая или щелочная, и многое, многое другое.
как видит робот
Люди используют пару глаз, чтобы получить визуальную информацию, хотя многие люди не могут определить точно расстояние до объекта. Человек может сказать вам, что до дерева около 20 метров. В то же самое время робот, оснащенный датчиками расстояния, может сказать вам, что до дерева 21.1 метра.
Кроме того, роботы могут дать точные значения различных факторов окружающей среды, про которые люди не знают или не способны воспринимать.
Например, робот может сказать вам какое у него точное угловое или линейное ускорение. Хотя большинство людей большинство людей скорее всего определит что он передвигается или поворачивает.
Человек может сказать вам на основе своего опыта, что предмет горячий или холодный, не прикасаясь к нему. В то время как тепловизор может предоставить 2D тепловое изображение, находящееся перед ним.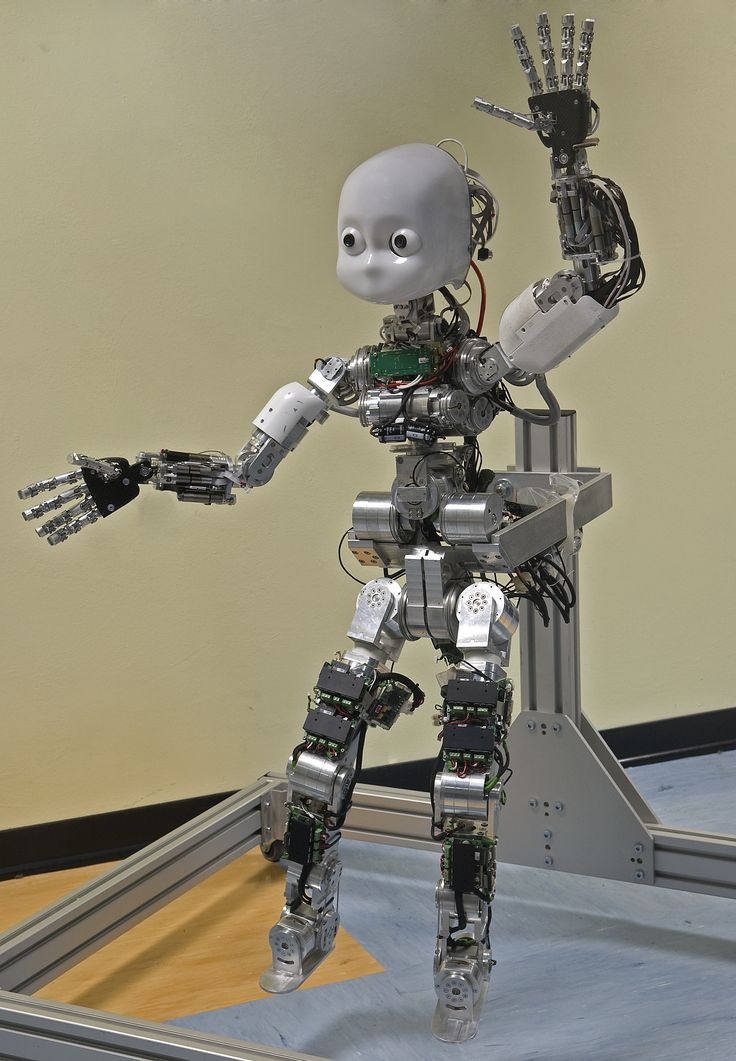 Хотя у человека есть пять основных чувств, датчики роботов могут иметь практически бесконечное количество разновидностей.
Хотя у человека есть пять основных чувств, датчики роботов могут иметь практически бесконечное количество разновидностей.
Какие датчики необходимы для вашего робота?
Итак, какие типы датчиков доступны, а какие датчики нужны вашему роботу? Вы должны сначала спросить себя, для каких целей нужен робот и что он должен измерять. Затем ниже можно посмотреть какие бывают типы датчиков для роботов.
Есть большая вероятность того, что вам не подойдет ни одна их перечисленных ниже категорий, поэтому постарайтесь определить основные элементы робота и разбить задачу на составляющие.
Датчики для роботов бывают:
- контактные
- дистанционные
- позиционирования
- реагирующие на условия окружающей среды
- использующие вращение
- и другие
Контактные датчики
— Кнопка / контактный выключатель.
Переключатели, кнопки и контактные датчики используются для обнаружения физического контакта между объектами, а не ограничиваются только людьми, нажимающими на кнопки.
кнопки для роботов
Бампер робота может быть оснащен датчиком касания или кнопкой. Дополнительно “усы” (как и у животного) могут использоваться для обнаружения объекта на различных расстояниях.
- Преимущества: очень низкая цена, простота интеграции, надежность.
- Недостатки: расстояние измерения ограничено.
— Датчики измерения давления
Кнопка, которая предлагает одно из двух возможных показаний (ON или OFF). В результате датчик робота производит выходной сигнал, пропорциональный прилагаемой к нему силе.
- Преимущества: позволяет измерять, сколько силы применяется.
- Недостатки: могут быть неточными и сложнее в использовании, чем простые коммутаторы.
Дистанционные датчики
— Ультразвуковые датчики
Датчики, которые используют ультразвуковые сигналы для измерения времени между отправкой сигнала и возвратом его эхо-сигнала называются ультразвуковыми. Датчики роботов в этом случае созданы на основе изучения летучих мышей, дельфинов и других животных.
Датчики роботов в этом случае созданы на основе изучения летучих мышей, дельфинов и других животных.
датчик ультразвука
Ультразвуковые дальномеры могут измерять диапазон расстояний, но используются, в частности, в воздухе и зависят от отражающей способности различных материалов.
- Преимущества: измерение среднего диапазона (несколько метров).
- Недостатки: поверхности и факторы окружающей среды могут повлиять на показания.
— Инфракрасные датчики
Инфракрасный диапазон также может использоваться для измерения расстояния. Некоторые инфракрасные датчики измеряют одно конкретное расстояние, в то время как другие обеспечивают выходной сигнал, пропорциональный расстоянию до объекта.
инфракрасный датчик Lego Education EV3
- Преимущества: низкая стоимость, достаточно надежные и точные.
- Недостатки: более широкий диапазон, чем у ультразвуковых датчиков.
— Лазер
Лазеры используются, когда требуется высокая точность, или большое расстояние до объекта, или когда присутствуют оба фактора. Сканирующие лазерные дальномеры используют спин-лазеры (ультрабыстрые лазеры) для двумерного сканирования расстояния до объектов.
Сканирующие лазерные дальномеры используют спин-лазеры (ультрабыстрые лазеры) для двумерного сканирования расстояния до объектов.
лазерный датчик
- Преимущества: очень точные с очень большим диапазоном.
- Недостатки: намного дороже, чем обычные инфракрасные или ультразвуковые датчики.
— Энкодеры
Оптические энкодеры часто используют пару светодиод фотодиод. На валу установлен диск с отверстиями, через которые сигнал со светодиода попадает на фотодиод и считывается количество импульсов.
оптический энкодер
Определенное количество отверстий соответствует полному углу, пройденному колесом. Зная радиус колеса, вы можете определить общее расстояние, пройденное этим колесом. Два энкодера дают вам относительное расстояние в двух измерениях.
- Преимущества: если нет скольжения, то высокая точность измерения. Часто устанавливается на задний вал двигателя.
- Недостатки: требуется дополнительное программирование, более точные оптические энкодеры могут дорого стоить.


— Линейный потенциометр
Линейный потенциометр способен измерять абсолютное положение объекта.
линейный потенциометр
- Преимущества: точно измеряет абсолютное положение.
- Недостатки: маленький диапазон.
— Датчики растяжения и изгиба
Датчик растяжения состоит из материала, сопротивление которого изменяется в зависимости от того, насколько он растянут. Датчик изгиба обычно представляет собой сэндвич из материалов, где сопротивление одного из слоев изменяется в зависимости от того, насколько он был согнут.
датчик растяжения
Их можно использовать для определения небольшого угла или поворота, например, сколько пальцев было согнуто.
- Преимущества: полезно, когда ось вращения является внутренней или недоступной.
- Недостатки: небольшая точность и возможность измерения только малых углов.
— Стереокамера
Как и человеческие глаза, две камеры, расположенные на расстоянии друг от друга, могут предоставлять информацию о глубине (стереовидение). Роботы, оснащенные камерами, могут быть одними из самых способных и сложных роботов.
Роботы, оснащенные камерами, могут быть одними из самых способных и сложных роботов.
стереокамера
Камера, в сочетании с правильным программным обеспечением, может обеспечить хорошее распознавание цвета и объектов.
Преимущества: возможность предоставления подробной информации и хорошая обратная связь.
Недостатки: сложность в программирование и в использовании информации.
Датчики позиционирования
— Локализация в помещении (навигация в комнате)
Внутренняя система локализации может использовать несколько маяков для триангуляции (определение взаимного расположения точек на поверхности) положения робота в помещении, в то время как другие используют камеру и ориентиры.
внутренняя система локализации
- Преимущества: отлично подходит для абсолютного позиционирования
- Недостатки: требуется сложное программирование и использование маркеров.
— GPS
GPS использует сигналы от нескольких спутников, вращающихся вокруг планеты, чтобы определить их географические координаты.
датчик GPS Lego EV3
Устройства GPS могут обеспечить географическое позиционирование с точностью до 5 метров, в то время как более сложные системы, включающие обработку данных и исправление ошибок, благодаря использованию других единиц GPS или ИДУ, могут иметь точность до нескольких сантиметров.
- Преимущества: не требует маркеров или других ссылок.
- Недостатки: могут работать только на открытом пространстве.
Датчики вращения
— Потенциометр
Поворотный потенциометр – это, по сути, делитель напряжения и обеспечивает аналоговое напряжение, соответствующее углу поворота ручки.
поворотный потенциометр
- Преимущества: простой в использовании, недорогой, достаточно точный, обеспечивает абсолютные показания.
- Недостатки: большинство из них ограничены 300 градусами вращения.
— Гироскоп
Электронный гироскоп измеряет скорость углового ускорения и подает соответствующий сигнал (аналоговый сигнал напряжения, последовательный канал связи, с I2C и т. д.). В электронном гироскопе используются пьезопластины.
д.). В электронном гироскопе используются пьезопластины.
электронный гироскоп
- Преимущества: отсутствие «механических» компонентов.
- Недостатки: датчик всегда подвергается угловому ускорению, тогда как микроконтроллер не всегда может принимать непрерывный входной сигнал, то есть значения теряются, что приводит к ”дрейфу» значений
— Энкодеры
Оптические энкодеры используют мини — инфракрасные пары передатчика / приемника. Количество разрывов инфракрасного пучка соответствует полному углу, пройденному колесом.
энкодер
Механический энкодер использует очень тонко обработанный диск с достаточным количеством отверстий, чтобы читать определенные углы. Поэтому механические датчики могут использоваться как для абсолютного, так и для относительного вращения.
- Преимущества: точность.
- Недостатки: у оптических энкодеров угол поворота является относительным (не абсолютным) от исходного положения.
Датчики роботов, реагирующие на условия окружающей среды
— Датчик света
Датчик света может использоваться для измерения интенсивности источника света, будь то естественным или искусственным. Обычно его сопротивление пропорционально интенсивности света.
- Преимущества: обычно очень недорогие и очень полезные.
- Недостатки: не могут различать источник или тип света.
— Датчик звука
Датчик звука — это, по сути, микрофон, который возвращает напряжение, пропорциональное уровню окружающего шума. Более сложные платы могут использовать данные из микрофона для распознавания речи.
датчик звука
- Преимущества: дешевый и надежный датчик.
- Недостатки: для того, чтобы расшифровать важную информацию требуется сложное программное обеспечение.
— Температурные датчики
Температурные датчики могут использоваться для измерения температуры окружающей среды или в сложных условиях, например в нагревательных элементах, печах и т. д.
д.
датчик температуры
- Преимущества: могут быть высокоточными.
- Недостатки: более сложные и точные датчики могут быть более сложными в использовании.
— Тепловизионная камера
Тепловизионный датчик (камера) инфракрасного или теплового изображения позволяет получить полное 2D-тепловое изображение всего, что находится перед камерой тепловизора. Таким образом, можно определить температуру объекта.
тепловизионная камера
- Преимущества: можно выборочно на расстоянии измерять тепловую активность объектов.
- Недостатки: высокая стоимость
— Датчики измерения влажности
датчик влажности
Датчики влажности определяют процентное содержание воды в воздухе и часто соединяются с датчиками температуры.
— Барометрический датчик давления
датчик давления
Датчик давления (который также может быть барометрическим датчиком) может использоваться для измерения атмосферного давления. Следовательно может дать представление о высоте БПЛА (беспилотный летательный аппарат).
Следовательно может дать представление о высоте БПЛА (беспилотный летательный аппарат).
— Датчики газа
Датчики газа используются для определения наличия и концентрации различных газов. Однако они нужны только специализированных робототехнических комплексов.
датчик угарного газа
- Преимущества: это единственные датчики роботов, которые могут быть использованы для точного обнаружения газа
- Недостатки: недорогие датчики могут давать ложные срабатывания или несколько неточны и поэтому не должны использоваться для критически важных задач.
— Магнитометры
Магнитометры могут быть использованы для обнаружения магнитов и магнитных полей. Также может определить полярность.
магнитометр
- Преимущества: помогает обнаружить ферромагнитные металлы.
- Недостатки: в некоторых случаях датчики могут быть повреждены сильными магнитами.
Датчики, использующие вращение
— Компас
Цифровой компас способен использовать магнитное поле Земли для определения его ориентации относительно магнитных полюсов.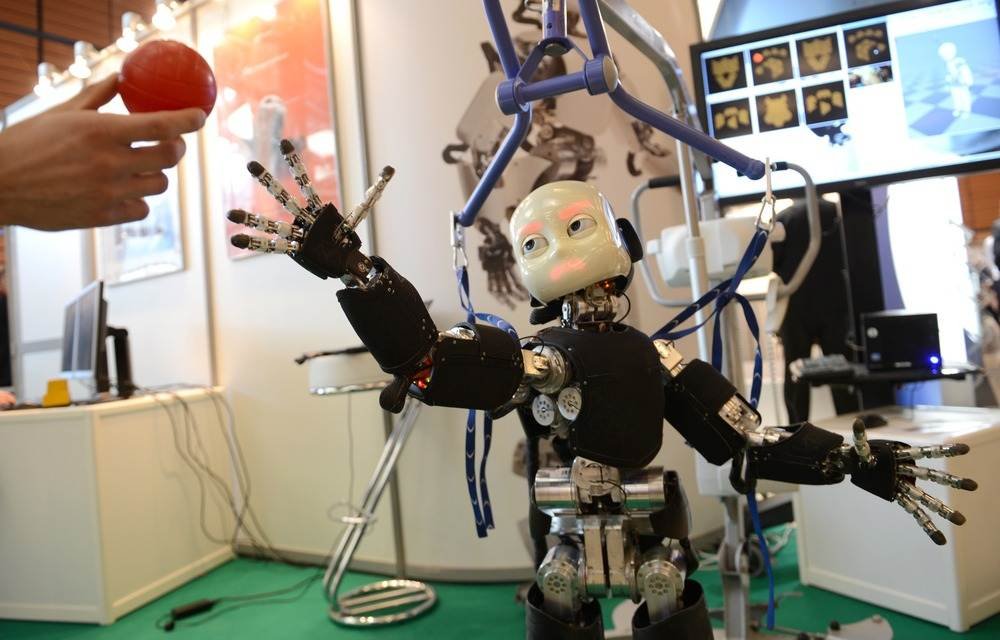 Наклон компаса компенсируется и учитывает тот факт, что робот не может передвигаться строго горизонтально.
Наклон компаса компенсируется и учитывает тот факт, что робот не может передвигаться строго горизонтально.
цифровой компас
- Преимущества: обеспечивает абсолютную навигации.
- Недостатки: более высокая точность увеличивает цену.
— Гироскоп
Электронные гироскопы способны определять угол наклона по одной или нескольким осям. Механические датчики наклона, как правило, определяют наклон робота при помощи ртути в стеклянных капсулах или шарах.
электронный гироскоп
- Преимущества: электронные гироскопы имеют более высокую точность, чем механические.
- Недостатки: более высокая стоимость.
— Акселерометры
Акселерометры измеряют линейное ускорение. Это позволяет измерять гравитационное ускорение или любое другое ускорение, которое испытывает робот.
Это может быть хорошим вариантом для приблизительной оценки расстояния, если ваш робот не может использовать окружающую среду для уточнения координат.
акселерометр для Arduino
Акселерометры могут измерять ускорение вдоль одной, двух или трех осей. Трехосевой акселерометр позволяет измерять все углы наклона сенсора в пространстве.
- Преимущества: они не требуют никаких внешних ссылок или маркеров для функционирования, и может обеспечить абсолютную ориентацию по отношению к гравитационному полю Земли или определить относительную ориентацию.
- Недостатки: они только приблизительно оценивают пройденное расстояние и не могут точно определить его.
— ИИБ
Инерциальный измерительный блок сочетает в себе мультиосевой акселерометр с мультиосевым гироскопом и иногда мультиосевым магнитометром для того, чтобы более точно измерить крен.Такие датчики роботов достаточно сложные.
- Преимущества: это очень надежный способ измерения без использования внешних ссылок (кроме магнитного поля Земли)
- Недостатки: может быть очень дорогим и сложным в использовании.

И другие
— Датчики тока и напряжения
Датчики тока и напряжения измеряют ток и/или напряжение конкретной электрической цепи. Это может быть очень полезно для определения того, сколько ваш робот сможет работать (измерять напряжение аккумуляторной батареи) или, если ваши моторы слишком сильно работает (измерения тока).
датчик тока и напряжения
- Преимущества: они делают именно то, что они предназначены.
- Недостатки: могут вносить изменения в измеряемое напряжение или ток. Иногда требуется изменить измеряемую электрическую цепь.
— Магнитные датчики
Магнитные датчики и магнитометры способны обнаружить магнитные предметы и могут требовать контакта с объектом, или должны быть расположены относительно близко к объекту.
магнитные датчики
Такие датчики роботов могут использоваться на автономной газонокосилке для обнаружения провода, проложенного по газону или для поиска скрытой проводки в квартире.
- Преимущества: как правило, недорогие
- Недостатки: как правило, должны располагаться относительно близко к объекту, и к сожалению, не могут обнаруживать немагнитные металлы.
— Датчики вибрации
Датчики вибрации предназначены для обнаружения вибрации объекта с помощью пьезоэлектрических или других технологий.
— Технологии RFID
Технология RFID – это технология беспроводного обмена данными посредством радиосигнала между электронной меткой, которая помещается на объект и специальным радиоэлектронным устройством, которое считывает сигнал метки.
Устройства радиочастотной идентификации могут использовать как активные (с питанием), так и пассивные (без питания) RFID-метки обычно имеющие размер и форму кредитной карты, небольшой плоский диск или дополнение к брелоку (другие формы также возможны).
технология RFID
Когда метка RFID находится на определенном расстоянии от считывателя RFID, создается сигнал с идентификатором тега.
- Преимущества: RFID метки обычно имеют очень низкую стоимость и могут определяться индивидуально.
- Недостатки: бесполезно для измерения расстояния, кроме случаев, когда метка находится в пределах диапазона.
Практическая часть
Типичным примером, демонстрирующим автономную работу робота, является робот на базе набора Lego EV3 для движения по линии при помощи одного или двух датчиков цвета. В этом случае датчики робота определяют яркость отраженного света.
Движение по линии
Как роботы решают задачи бизнеса и как внедрить умные машины в свое производство
При слове «роботизация» представляется фабрика будущего. На самом деле роботы могут работать на любом заводе, выполняя монотонные или опасные задачи. Это повышает производительность, качество продукции и условия труда. Сплошные плюсы, но роботизация, на первый взгляд, кажется сложной задачей. Как же выбрать робота, рассчитать окупаемость, найти сотрудников?
На самом деле роботы могут работать на любом заводе, выполняя монотонные или опасные задачи. Это повышает производительность, качество продукции и условия труда. Сплошные плюсы, но роботизация, на первый взгляд, кажется сложной задачей. Как же выбрать робота, рассчитать окупаемость, найти сотрудников?
Компания TECHNORED
Блоги
Артем Лукин, генеральный директор разработчика робототехники TECHNORED, ответил на самые распространенные вопросы по роботизации производств.
Какие бывают роботы для производства?
Для производственных нужд подходят промышленные или коллаборативные роботы. Но сами по себе они не решают задачу. Другое дело – робот как часть роботизированной системы, в которую помимо самого манипулятора входит ПО, оборудование, а также установка, обучение и консалтинг.
Роботизированная система на базе промышленного робота – доступный вариант для производства любой величины. Система на базе кобота – это более дорогой комплекс, который подходит для производств с часто меняющимися задачами. Эту модель легко перенастроить под другой процесс, а также она может работать бок о бок с человеком.
Система на базе кобота – это более дорогой комплекс, который подходит для производств с часто меняющимися задачами. Эту модель легко перенастроить под другой процесс, а также она может работать бок о бок с человеком.
Как определить, можно ли решить задачи бизнеса с помощью роботизации?
В первую очередь роботов внедряют для выполнения рутинных или опасных процессов – сварка, сборка, шлифовка, резка, загрузка деталей в станок, сверление и т. д. В то же время существуют нестандартные задачи – например, лабораторное тестирование. Как понять, что роботизация процесса принесет нужные результаты? Проанализировать проблемы бизнеса.
Если стоит как минимум одна из задач в списке ниже, робот станет эффективным решением.
- Повышение производительности.
- Нехватка персонала.
- Необходимость в сокращении затрат времени или материалов.
- Создание гибкого производства. Это особенно актуально для тех, кто выполняет разовые заказы или часто меняет номенклатуру.
- Вредные или опасные условия труда, которые влияют на здоровье и безопасность сотрудников.
- Влияние человеческого фактора при выполнении скучной или опасной работы, которое приводит к снижению качества продукции.
 Это особенно актуально для тех, кто выполняет разовые заказы или часто меняет номенклатуру.
Это особенно актуально для тех, кто выполняет разовые заказы или часто меняет номенклатуру.Как правильно рассчитать окупаемость?
Окупаемость – один из самых важных критериев, особенно для малого и среднего бизнеса. Самая распространенная ошибка – рассчитывать этот показатель только на основе снижения фонда оплаты труда. Это неправильно, потому что, вопреки распространенному мифу, роботы не отнимают рабочие места, а создают их.
Есть масса «робо-профессий» – технологи, управленцы, инженеры, операторы и другие эксперты. По статистике, к 2035 году потребность в подобных кадрах составит 20 000 человек.
Основными факторами окупаемости являются рост производительности, качества продукции, конкурентоспособности и, как следствие, прибыли. Кроме того, необходимо учитывать снижение стоимости простоя, расхода материалов и брака. Вот примеры «из жизни» заводов, которые наглядно это показывают.
Кроме того, необходимо учитывать снижение стоимости простоя, расхода материалов и брака. Вот примеры «из жизни» заводов, которые наглядно это показывают.
Экономия на дополнительных сменах
Одна из распространенных задач у малых и средних промышленных предприятий – увеличить производительность завода под тендер, а затем вернуться к объемам, рассчитанным на стандартный уровень спроса. Есть два пути: привлечь дополнительных сотрудников или установить робота. Он может работать во вторую и третью смену, а существующие сотрудники – продолжать работать днем.
Найти новых людей не так просто. Отрасль испытывает дефицит кадров. По данным Росстата, в 2015-2020 гг. объемы промышленного производства увеличились на 10,6%, в то время как численность работников предприятий снизилась на 4,7%. Если же заводу все-таки удается привлечь дополнительных людей, то это затраты: на закупку новых станок, поиск и адаптацию, зарплату, обеды, униформу и так далее. В то время как робот – единоразовая инвестиция, которая при средней стоимости системы 3–5 млн окупается за 1-2 года в зависимости от отрасли.
В то время как робот – единоразовая инвестиция, которая при средней стоимости системы 3–5 млн окупается за 1-2 года в зависимости от отрасли.
youtube
Нажми и смотри
Экономия на простое линии
Зачастую один и тот же сотрудник на предприятии может быть и технологом, который пишет программу для станка с ЧПУ, и оператором, который работает за ним работает. Из-за простоя оборудования во время написания программы предприятие не может брать новые заказы. Кроме того, оно вынуждено делать одну и ту же номенклатуру вне зависимости от ее рентабельности, и не может позволить себе создавать новые продукты.
Обслуживание станка – это монотонная работа, которая не требует решения нестандартных задач. Эту работу можно переложить на робота, а человека перевести в офис – писать программы. Тогда производственная линия будет работать и когда сотрудник занимается программированием, и даже когда отдыхает – то есть и в одну, и в две, и в три смены. Результат: рабочее место сохранено за человеком, а производство выдает в несколько раз больше продукции.
Результат: рабочее место сохранено за человеком, а производство выдает в несколько раз больше продукции.
Где найти высококвалифицированных специалистов по роботизации?
Вопреки расхожему мнению, вовсе необязательно искать новых специалистов. К тому же их в стране пока не так много, потому что многие программы по робототехнике в университетах не учитывают специфику производств. Гораздо выгоднее – и устойчивее в контексте социальной ответственности – обучить собственных сотрудников, сохранив за ними рабочие места и улучшив условия труда.
Главное – выбрать качественную программу, сухая теория здесь не подойдет. Нужны преподаватели с опытом и инженерным образованием. Мы советуем придерживаться таких критериев при выборе обучения:
- Много практики по управлению роботом. Необязательно иметь специальное образование или навыки, но важно проделать все «руками», иметь возможность задавать вопросы.
- Теория и практика по обслуживанию робота, работе с запчастями, проектированию оснастки. Последнее особенно важно, потому что позволяет быстро переналаживать комплекс под новую рентабельную номенклатуру и дает экономию на услугах подряда.
- Инструктаж по безопасности. Некоторые модели роботов требуют соблюдения определенных требований.
- Немного теории также будет полезно: какие бывают роботы, кто их производит.

Что такое робототехника? Что такое роботы? Типы роботов
Когда мы обсуждаем робототехнику, не кажется ли нам, что будущее уже наступило.
Отрасли никогда не были прежними с тех пор, как роботы взяли на себя работу, которую раньше выполняли люди. Хотя это не сверхинтеллектуальные андроиды или что-то в этом роде — но скоро роботы будут выполнять некоторые задачи лучше нас, а другие лучше оставить людям, а не машинам.
Что такое робототехника?
Робототехника — это междисциплинарная область, объединяющая науку, технику и технологии. Он включает в себя проектирование, строительство, эксплуатацию и использование машин, называемых роботами, для выполнения задач, традиционно выполняемых людьми, или для замены человеческих действий.
Он включает в себя проектирование, строительство, эксплуатацию и использование машин, называемых роботами, для выполнения задач, традиционно выполняемых людьми, или для замены человеческих действий.
Целью робототехники является создание машин, которые могут помогать и помогать людям.
Он объединяет области машиностроения, электротехники, информационной инженерии, мехатроники, электроники, биоинженерии, вычислительной техники, техники управления, разработки программного обеспечения, математики и других.
Некоторые применения робототехники включают:
- Работа вместе с людьми на производственных предприятиях (известные как ко-боты)
- Хирургические помощники
- Автономные бытовые роботы, которые выполняют такие задачи, как уборка пылесосом и кошение травы
- Помощь во время поиска и — спасательные операции после стихийных бедствий
- Обнаружение наземных мин в зонах боевых действий
- Помощь в тушении лесных пожаров
Что такое роботы?
Робот — это машина, особенно программируемая компьютером, способная быстро и точно выполнять комплекс сложных задач. Он может управляться внешним устройством управления, или управление может быть встроено внутрь. Большинство роботов — это машины для выполнения задач, разработанные с упором на абсолютную функциональность, а не на выразительную эстетику. Эти задачи могут быть автономными, с небольшим вмешательством человека или независимыми от него.
Он может управляться внешним устройством управления, или управление может быть встроено внутрь. Большинство роботов — это машины для выполнения задач, разработанные с упором на абсолютную функциональность, а не на выразительную эстетику. Эти задачи могут быть автономными, с небольшим вмешательством человека или независимыми от него.
Роботы широко используются в таких отраслях, как автомобилестроение, для выполнения простых повторяющихся задач и в отраслях, где работа должна выполняться в опасных для человека средах.
Вот некоторые области, в которых роботы работают лучше, чем люди:
- Автоматизируйте ручные или повторяющиеся действия.
- Работа в опасных и непредсказуемых условиях.
- Заполняйте наши фармацевтические рецепты, готовьте капельницы и помогайте во время операций.
- Помощь в поиске предметов и переносе их по складам.
- Помогите с поиском, спасением и даже помогите с упаковкой и подготовкой еды во время чрезвычайных ситуаций.
- Доставка посылок последней мили и заказа еды.
Типы роботов
Отрасли промышленности решают некоторые проблемы, с которыми они сталкиваются на современном рынке, такие как повышение производительности и нехватка квалифицированных рабочих. Различные типы роботов улучшают работу.
- Предварительно запрограммированные роботы:
Предварительно запрограммированные роботы работают в простой контролируемой среде, и для их успешной работы не требуются системы управления ИИ. Предварительно запрограммированные роботы — это те, которым нужно заранее сказать, что делать, и затем они выполняют эту программу.
Наиболее известные запрограммированные роботы, известные своей точностью, используются для сборки автомобилей на большинстве автомобильных заводов по всему миру. Это предварительно запрограммированные роботы-манипуляторы, достаточно большие, чтобы управлять целыми автомобилями, как если бы они были игрушечными машинками. Эти роботы могут водить автомобили и даже ремонтировать автомобили.
Эти роботы могут водить автомобили и даже ремонтировать автомобили.
Еще одно распространенное использование предварительно запрограммированных роботов — предоставление студентам-медикам различных сценариев, которые они должны диагностировать и лечить. Эти роботы запрограммированы на возможные сценарии, и их реакции на обращение со студентами также запрограммированы заранее. Например, вы должны попробовать один из методов лечения, на которые запрограммирован робот, а не экспериментальный метод лечения, потому что робот не будет знать, как реагировать. Поскольку они не могут изменить свое поведение, пока работают, и никто не руководит их действиями.
- Роботы-гуманоиды:
Роботы-гуманоиды — это роботы, о которых думает большинство из нас, когда мы думаем о роботах. Эти роботы выглядят или имитируют поведение человека. Роботы-гуманоиды обычно выполняют действия, подобные человеческим, такие как бег и перенос предметов, а иногда их строят так, чтобы они выглядели и напоминали человеческое тело, черты лица и выражения.
Наиболее яркими примерами человекоподобных роботов являются Sophia от Hanson Robotics, Asimo от Honda, который имеет механический внешний вид, а также андроиды, такие как серия Geminoid, которые выглядят как люди.
Робот София от Hanson Robotics
- Автономные роботы:
Автономная робототехника обычно считается подразделением ИИ, робототехники и информационной инженерии. Эти роботы работают независимо, разумно и адаптируются к окружающей среде без непосредственного контроля со стороны человека.
У них есть «автономия», потому что в конечном счете машина отвечает за обнаружение изменений в окружающей среде и адаптацию к ним.
Автономные роботы обычно предназначены для выполнения задач в открытой среде, которая может меняться. Людям не обязательно постоянно контролировать и манипулировать окружающей средой, чтобы приспосабливаться к ограничениям способности автономного робота справляться. Они совершенно уникальны, потому что они используют датчики для восприятия окружающего мира, а затем используют структуры для принятия решений, обычно компьютер, чтобы сделать следующий шаг.
Полностью автономный робот может –
- узнавать о своем окружении и окружающей среде
- работать без вмешательства человека в течение длительного периода времени
- перемещаться полностью или частично в рабочей среде без помощи человека
- Избегайте ситуаций, которые наносят вред людям, имуществу или самому себе, если это не является частью спецификаций конструкции автономного робота.
- Может также учиться или получать новые знания, например, приспосабливаться к новым методам выполнения своих задач или адаптироваться к изменяющимся условиям.
Автономные роботы, как и другие машины, требуют регулярного обслуживания. Примером автономного робота может служить пылесос Roomba, который использует датчики для свободного передвижения по дому.
Робот-пылесос Roomba от iRobot
- Телеуправляемые роботы:
Телеуправляемые роботы — это полуавтономные боты, которыми дистанционно управляет человек. Это комбинация двух основных подполей, телеуправления и телеприсутствия. Эти роботы обычно работают в экстремальных географических условиях, погоде, обстоятельствах и т. д. У телеуправляемых роботов может быть какой-то искусственный интеллект, но обычно они получают команды от оператора-человека и действуют точно в соответствии с инструкциями. На данный момент эти роботы в основном используются в медицинских операциях и военных операциях. С передовыми технологиями виртуальной реальности (VR) и дополненной реальности (AR) телеуправляемые роботы входят в новый спектр — телеуправляемые роботы, управляемые VR и AR. Особое внимание будет уделено использованию таких роботов в медицине, так как теперь ваш врач может телеприсутствовать в вашем родном городе, даже если он находится в поездке.
Это комбинация двух основных подполей, телеуправления и телеприсутствия. Эти роботы обычно работают в экстремальных географических условиях, погоде, обстоятельствах и т. д. У телеуправляемых роботов может быть какой-то искусственный интеллект, но обычно они получают команды от оператора-человека и действуют точно в соответствии с инструкциями. На данный момент эти роботы в основном используются в медицинских операциях и военных операциях. С передовыми технологиями виртуальной реальности (VR) и дополненной реальности (AR) телеуправляемые роботы входят в новый спектр — телеуправляемые роботы, управляемые VR и AR. Особое внимание будет уделено использованию таких роботов в медицине, так как теперь ваш врач может телеприсутствовать в вашем родном городе, даже если он находится в поездке.
Примерами телеуправляемых роботов являются подводные роботы, которые помогли устранить утечку нефти в Мексиканском заливе, и управляемые человеком подводные лодки, использовавшиеся для устранения протечек подводных труб во время разлива нефти BP, или дроны, используемые для обнаружения наземных мин на поле боя.
Роботы имеют широкий спектр вариантов использования, что делает их идеальной технологией будущего. Раньше, чем мы можем себе представить, мы увидим роботов в больницах, отелях и даже на дорогах.
Что такое роботы? (с картинками)
`;
Слово робот обычно используется для обозначения механического агента, который выполняет одну или несколько задач, в которых он имитирует агента человека или животного посредством программирования или команд. Другое слово, используемое как синоним, — автомат . Виртуальные роботы существуют, но чаще всего называются сокращённо боты .
Роботы используются в освоении космоса.
Этот термин происходит от чешского слова robota , что означает тяжелая работа или рабство. Его придумал чешский драматург Карел Чапек в своей пьесе « рубля». , что означает «Универсальные роботы Россум». Он был опубликован в 1921 году, а английский язык введен в 1923 году. Область исследования называется робототехника , а люди, которые специализируются на ней, называются робототехниками .
Андроиды — это интеллектуальные роботы, которые ведут себя как человек.
Роботов можно классифицировать по-разному. Создатели могут использовать средства передвижения в качестве своих категорий, различая свои творения по тому, являются ли они статичными, с одной стороны, или имеют ли они гусеницы, пропеллер, плавники, ноги, колеса, роторы или другие средства движения.
Роботы работают на конвейере по сборке автомобилей.
Однако Национальное управление по аэронавтике и исследованию космического пространства (НАСА) классифицирует роботов по-разному. Во-первых, они классифицируются по тому, работают ли они на Земле или в космосе. Во-вторых, они классифицируются по отраслям, в которых они работают. В-третьих, они классифицируются по типу работы, которую они выполняют.
Игрушечный робот.
Эти машины используются в таких отраслях, как производство, медицина, армия и транспорт. Они широко используются в сборочных операциях, в которых они выполняют ряд задач, в том числе следующие:
Они широко используются в сборочных операциях, в которых они выполняют ряд задач, в том числе следующие:
- дуговая сварка
- литье под давлением
- зачистные машины
- газовая сварка
- манипуляционные станки
- размещение предметов в строящейся структуре
- нанесение герметика
- точечная сварка
- Окраска распылением
Роботы также используются для осмотра деталей, изготовления стекла, очистки, радиационного контроля, сортировки, погрузки и разгрузки, крепления, ковки и пескоструйной обработки. Поскольку они не люди, их можно использовать в опасных ситуациях, таких как пожаротушение, военные действия и обнаружение бомб. Хирургические роботы находятся в стадии разработки, а роботизированные руки, например, уже используются в некоторых хирургических операциях, что позволяет хирургу-человеку лучше контролировать лапароскопические процедуры, выполняемые через очень маленький разрез.
Дроид — это название типа интеллектуального робота. Дроид происходит от сокращения слова android , что означает «автомат, имеющий черты человека». Примеры дроидов включают C-3PO и R2-D2 из Звездных войн славы. Джордж Лукас, создатель «Звездных войн», зарегистрировал этот термин как торговую марку.
В реальном мире ряд компаний работает над роботами-андроидами, которые очень похожи на людей и способны взаимодействовать с реальными людьми. Большая часть текущей работы ведется в Японии и Южной Корее. Некоторые южнокорейские компании надеются в будущем сделать их предметом домашнего обихода.
Военные и полицейские роботы могут использоваться для обезвреживания бомб или переноски автоматизированных систем вооружения.
Мэри Элизабет увлечена чтением, письмом и исследованиями, а также имеет склонность к
исправление дезинформации в Интернете. Помимо публикации статей в EasyTechJunkie об искусстве, литературе и
музыки, Мэри Элизабет — учитель, композитор и автор. У нее есть степень бакалавра. из письма Чикагского университета
программу и степень магистра Университета Вермонта, и она написала книги, учебные пособия и материалы для учителей по
языка и литературы, а также содержание музыкальных композиций для Sibelius Software.
Вам также может понравиться
Рекомендуется
Роботы для детей: изучайте интересные факты и развлекайтесь
- Домашняя страница
- SAT
- AP
- ACT
- PSAT
- Подробнее
30 апреля 2022 г.
Когда вы думаете о роботе, что первое приходит вам на ум? Роботы у многих ассоциируются с образом автоматизированных человекоподобных машин с монотонными голосами. В то время как некоторые роботы разработаны специально, чтобы выглядеть как люди, многие из действующих сегодня в мире роботов не имеют никаких физических особенностей человека. Роботы часто ассоциировались с научной фантастикой (R2-D2, Wall-E, Transformers), и они широко используются на фабриках и в других местах производства для их механических услуг. Сегодня мы находим их повсюду вокруг нас — в наших домах, офисах, школах и торговых центрах, и это лишь некоторые из мест. Роботы — одни из самых захватывающих изобретений, некоторые из них объединены с искусственным интеллектом и машинным обучением, а некоторые — с человеческим разумом, сердцем и мозгом. Возможно, вы задаетесь вопросом о некоторых интересных фактах о роботах. Но для начала давайте сначала ответим на несколько основных вопросов.
Робот — это машина, запрограммированная на выполнение задач и воспроизведение действий человека. Слово «робот» происходит от чешского слова «robota», которое примерно переводится как «принудительный труд» или «тяжелая работа». Эти машины созданы для различных целей и выполнения множества различных функций.
Слово «робот» происходит от чешского слова «robota», которое примерно переводится как «принудительный труд» или «тяжелая работа». Эти машины созданы для различных целей и выполнения множества различных функций.
Что такое робототехника?
Наука и изучение роботов называется «робототехникой». Ученые изучают, проектируют, производят и экспериментируют с роботами в области робототехники. Робототехника является междисциплинарной, но в основном относится к области инженерии и компьютерных наук. Читайте дальше, чтобы узнать больше фактов о роботах для детей.
Каковы характеристики роботов?
- У роботов нет физических или экологических потребностей, как у людей.
- С момента своего создания и массового распространения роботы заменили рабочую силу человека.
- У роботов нет чувств и эмоций. Однако «Разумные роботы» запрограммированы на сознание с помощью искусственного интеллекта.
- Роботы очень дороги из-за их механической организации и потребностей в обслуживании, а также времени, необходимого для их разработки.
- Источником энергии для роботов в основном является электричество, которое поступает по проводам, солнечной энергии или встроенным батареям.
- Существует множество различных типов роботов в зависимости от их назначения и функций: промышленные, военные, служебные, исследовательские, опасные среды, медицинские и развлекательные, и это лишь некоторые из них.
- Автоматы — это полностью автономные роботы, которые повторяют действия.
- Аэроботы — роботы, способные летать на другие планеты.

Какие факты об истории роботов?
- Роботы изначально были созданы из-за их практической полезности для людей — их целью было помогать людям и облегчать им работу.
- Греческий математик Архит из Тарента создал первого известного «робота» в V веке до нашей эры. Архит создал механического деревянного голубя, который мог летать на высоту до 200 метров и махать крыльями. Точные детали и механика этого изобретения неизвестны, но некоторые предполагают, что голубь был связан с тросом, прикрепленным к шкиву и противовесу, что позволяло голубю «летать».
- Леонардо да Винчи сконструировал робота-гуманоида в 1464 году. Робота да Винчи называли «механическим рыцарем», и он мог самостоятельно двигать руками, сидеть и стоять.
- Слово «робот» впервые было использовано в пьесе «RUR» («Универсальные роботы Россум»). RUR был написан чешским драматургом и журналистом Карелом Чапеком в 1920 году.
- «Электро» — так звали первого говорящего робота-гуманоида в 1939 году. Электро был построен компанией Westinghouse и был запрограммирован на произнесение 700 слов. Он был 7 футов в высоту и мог выполнять простые задачи, такие как надувание воздушных шаров.
- Термин «робототехника» был придуман Исааком Азимовым, писателем-фантастом и футуристом, в 1941 году. Азимов использовал этот термин для характеристики робототехники и предвидел рост индустрии мощных роботов.
- Первый мобильный и восприимчивый робот назывался «Шейки». SRI International разработала Shakey в Силиконовой долине. Shakey был разработан для планирования, поиска маршрута и перестановки простых объектов. Шейки также называли «первым электронным человеком».
- В 1948 году британский робототехник Уильям Грей Уолтер изобрел роботов Элмера и Элси. Эти роботы могут воспроизводить реалистичное поведение.
- Первый промышленный робот был представлен в 1961 году. Этот робот назывался Unimate. Он был создан Джорджем Деволом и Джозефом Энгельбергером для сварки кузовов автомобилей на сборочной линии завода General Motors.
- Первая задокументированная непреднамеренная смерть, вызванная роботом, произошла в 1981 году, когда рука робота убила японского промышленного рабочего.
- Профессор Кевин Уорвик из Университета Рединга в 1998 году вживил в свою нервную систему микрочип, который позволил ему управлять освещением, замками, лифтами и другими устройствами.
 Архит создал механического деревянного голубя, который мог летать на высоту до 200 метров и махать крыльями. Точные детали и механика этого изобретения неизвестны, но некоторые предполагают, что голубь был связан с тросом, прикрепленным к шкиву и противовесу, что позволяло голубю «летать».
Архит создал механического деревянного голубя, который мог летать на высоту до 200 метров и махать крыльями. Точные детали и механика этого изобретения неизвестны, но некоторые предполагают, что голубь был связан с тросом, прикрепленным к шкиву и противовесу, что позволяло голубю «летать». Азимов использовал этот термин для характеристики робототехники и предвидел рост индустрии мощных роботов.
Азимов использовал этот термин для характеристики робототехники и предвидел рост индустрии мощных роботов.
Как роботы используются в современном мире?
- Согласно исследованию World Robotics 2020, проведенному Международной федерацией робототехники (IFR), в настоящее время в мире используется более 2 миллионов промышленных роботов.
- Высокоспециализированные хирурги используют роботов в хирургии для выполнения операций, недоступных для человеческой руки.
- Роботы используются в космосе для исследования и выполнения задач, которые не под силу людям-исследователям. Роботы используются, потому что они могут выживать в течение длительного времени в суровых условиях космоса.
- НАСА уже отправило на планету Марс пять роботизированных аппаратов. Этих роботов назвали вездеходами, и они получили имена — Sojourner, Spirit, Opportunity, Curiosity и Perseverance.
- Нанороботы — это микроскопические роботы, используемые в здравоохранении, сельском хозяйстве и других областях. Их ширина не превышает 50-11 нм.
- Самый маленький в мире летающий робот — RoboBee, автономный летающий микробот. Эти крошечные роботы были изобретены Институтом Висса в Гарварде для использования в сельском хозяйстве или ликвидации последствий стихийных бедствий.
- Япония переживает бум на рынке роботов для ухода за больными. Поскольку к 2065 году ожидается, что 40% населения Японии будет старше 65 лет, страна инвестирует в медицинские технологии, включая роботов-медсестер.
- Южная Корея стала первой страной, разработавшей закон о роботах. Хотя эти законы еще не закреплены в конституции, некоторые законы, такие как Закон о кибербезопасности на веб-сайте Stanford Law, устанавливают некоторые правила этики в робототехнике.
 Эти крошечные роботы были изобретены Институтом Висса в Гарварде для использования в сельском хозяйстве или ликвидации последствий стихийных бедствий.
Эти крошечные роботы были изобретены Институтом Висса в Гарварде для использования в сельском хозяйстве или ликвидации последствий стихийных бедствий.Какие факты касаются статистики роботов?
- Около половины всех роботов в мире находятся в Азии, а 30% всех роботов — в Японии.
- Вакуумные роботы в настоящее время являются самым популярным типом бытовых роботов.
- Музей компьютерной истории предоставляет полную хронологию ИИ и робототехники.
- В Зале славы роботов Карнеги-Меллона представлены некоторые из самых влиятельных вымышленных роботов, такие как Железный великан из 19-го века.99, а Мария из фильма 1927 года «Метрополис»

Какие интересные факты о роботах для детей?
Помимо практического и научного использования, роботы также используются для развлечения и развлечения. Ниже приведены некоторые забавные факты о роботах для детей:
- София, человекоподобный робот, созданный Hanson Robotics, является первым в мире роботом-гражданином и первым роботом-послом инноваций для ПРООН.
- Роботы могут видеть и слышать с помощью камер и датчиков, которые создают картину окружающей их среды.
- Большинство роботов с искусственным интеллектом — женщины, поскольку исследования показали, что большая часть населения предпочитает женский голос мужскому.
- Корпус морской пехоты США протестировал четвероногого робота-собаку, разработанного командой Boston Dynamics из Google X, чтобы изучить возможность его использования в бою.
- Baymax, вымышленный медицинский робот из диснеевского фильма «Большой герой 6», вдохновлен исследованиями в области высокотехнологичной робототехники, проведенными в Университете Карнеги-Меллона. Студент Карнеги-Меллона Сиддхарт Санан разработал надувную роботизированную руку для своей докторской степени. исследовательская работа. Роботизированная рука Санана послужила источником вдохновения для создания милого персонажа Baymax.
- PARO — это робот-тюлень для терапии животных с пятью тактильными, слуховыми, световыми, температурными датчиками и датчиками позы. Таканори Шибата создал его в Институте исследования интеллектуальных систем Японии AIST.

Какое будущее у роботов и робототехники?
По мере того, как вы изучали эти забавные факты о роботах для детей и фактах о робототехнике для детей, продвигаясь вперед, таких фактов будет еще много. В последние годы было сделано много разработок в области робототехники. Области искусственного интеллекта и индустрия смартфонов открыли новые пути для развития и роста робототехники. То, что мы когда-то видели только в кино, теперь становится свидетелями в реальности. Недавние инновации в робототехнике способствовали оценке того, что к 2030 году этот сектор будет стоить 260 миллиардов долларов. Роботы, вероятно, будут использоваться в основном в профессиональных услугах, таких как уборка, доставка и транспортировка. Со временем, когда регулярно происходят новые разработки и изобретения, вы можете ожидать этого в ближайшее время. Детям предстоит заново изучить целый ряд новых фактов о робототехнике.
Области искусственного интеллекта и индустрия смартфонов открыли новые пути для развития и роста робототехники. То, что мы когда-то видели только в кино, теперь становится свидетелями в реальности. Недавние инновации в робототехнике способствовали оценке того, что к 2030 году этот сектор будет стоить 260 миллиардов долларов. Роботы, вероятно, будут использоваться в основном в профессиональных услугах, таких как уборка, доставка и транспортировка. Со временем, когда регулярно происходят новые разработки и изобретения, вы можете ожидать этого в ближайшее время. Детям предстоит заново изучить целый ряд новых фактов о робототехнике.
Релевантные блоги
Блоги
Является ли 34 хорошим показателем ACT? Как я могу улучшить его?
Давайте посмотрим на средний балл ACT, необходимый для отличного приложения, и на то, как вы можете его улучшить.
Подробнее >>
Сколько стоят тесты AP? Все, что вам нужно знать
Учащиеся могут иметь право на получение вознаграждений обоих типов в зависимости от их результатов на экзаменах AP и правил колледжа.