Содержание
Кто изобрел первого в мире робота?
Слово «робот» было популяризовано почти сто лет назад чешским драматургом Карелом Чапеком в одной из популярных пьес 1920-х годов. Происхождение слова робот произошло от старославянского слова работа, которое относилось к принудительному труду или рабству. В спектакле компания Rossum's Universal Robot (R.U.R.) использовала биотехнологии для производства искусственных рабочих, что далековато от сегодняшних механических роботов.
Хотя пьеса была популярна, для создания первого настоящего изобретения робота в 1954 году потребовалось более 30 лет. В патентной заявке на программируемый манипулятор робота Джордж Девол описал его как "Программируемый перенос изделия", сославшись на возможность программировать устройство для перемещения предметов.
История роботов могла бы быть совершенно иной, если бы не одна судьбоносная встреча. На коктейльной вечеринке в 1956 году Джордж Девол и Джозеф Энглбергер открыли для себя общий интерес к научной фантастике и предпринимательству. Это привело их к тому, что они стали деловыми партнерами, кардинально изменив будущее робототехники. Сегодня Энгельбергер широко известен как отец робототехники. Он внедрил и популяризовал термин "робот" и способствовал использование роботов на производстве.
Это привело их к тому, что они стали деловыми партнерами, кардинально изменив будущее робототехники. Сегодня Энгельбергер широко известен как отец робототехники. Он внедрил и популяризовал термин "робот" и способствовал использование роботов на производстве.
Джозеф Энгельбергер слева, Джордж Девол справа, 1960 год.
Когда и зачем был построен первый робот-манипулятор
Первый роботизированный манипулятор, который Девол и Энглбергер назвали Unimate #001, был изготовлен в 1959 году. В 1961 году Девол получил патент на изобретение робота и вместе с Энгельбергером основал первую в мире роботизированную компанию Unimation — аббревиатуру термина "универсальная автоматизация". Первый робот был установлен на заводе General Motors в Нью-Джерси для помощи машине горячего литья под давлением.
Компания Unimation продолжила разработку роботов для сварки и других областей применения в быстрорастущей автомобильной промышленности. К 1966 году Unimation выдала лицензии Nokia в Финляндии и Kawasaki Heavy Industries в Японии на производство и продажу Unimate, расширив использование программируемых манипуляторов-роботов на мировой рынок.
К 1966 году Unimation выдала лицензии Nokia в Финляндии и Kawasaki Heavy Industries в Японии на производство и продажу Unimate, расширив использование программируемых манипуляторов-роботов на мировой рынок.
Энгельбергер и Девол осознали ценность этого устройства для производства. Автомобильная промышленность по-прежнему является крупнейшим рынком для робототехники, однако другие отрасли промышленности, включая сборку электроники, биотехнологии, производство продуктов питания и напитков, а также металлообработка и производство пластмасс, быстро развертывают роботы в рамках мер по их автоматизации. Энгельбергеру также было интересно узнать, как роботы могут быть использованы на благо человечества. Например, он был особенно заинтересован в том, как робототехника может
быть применена в сфере услуг и здравоохранения.
Современные типы роботов
Традиционные роботы широко используются в производственных условиях. Самой быстрорастущей категорией программируемых роботов-манипуляторов сейчас являются коллаборативные роботы (или "коботы"). Эта категория, впервые представленная компанией Universal Robot в 2008 году, навсегда изменила историю роботов. Благодаря инновациям в области автоматизации безопасности роботы больше не требуется устанавливать в изолированных ячейках. Такие роботы могут работать в тесном контакте с людьми.
Эта категория, впервые представленная компанией Universal Robot в 2008 году, навсегда изменила историю роботов. Благодаря инновациям в области автоматизации безопасности роботы больше не требуется устанавливать в изолированных ячейках. Такие роботы могут работать в тесном контакте с людьми.
С тех пор выпуск коллаборативных роботов освоили многие традиционные производители промышленных роботов, а также стартапы. Тем не менее, растущую на 50-100% в год, Universal Robot и сейчас многие считают лидером рынка коботов.
Модель UR10 в работе
Коллаборативные роботы отличаются от традиционных промышленных роботов несколькими ключевыми характеристиками. Каждый тип роботов имеет свои преимущества и недостатки, в зависимости от их использования. Например, традиционные промышленные роботы, как правило, представляют собой крупное стационарное оборудование, работающее на высоких скоростях с чрезвычайно высокой точностью для автоматизации крупномасштабных, постоянно меняющихся производственных линий.
Эти роботы обычно сложно интегрировать и программировать, но после установки они требуют минимального вмешательства человека. Коллаборативные роботы — это небольшие, легкие и гибкие инструменты автоматизации, которые легко программируются и устанавливаются.
Коллаборативные роботы можно применять для поддержки мелкосерийного смешанного производства в производственном помещении любого размера. Они предназначены для совместной работы с людьми на производственных линиях, и помогают сочетать повторяющиеся задачи, идеально подходящие для автоматизации, с более сложными задачами, требующими человеческой ловкости и/или решения проблем. Коллаборативные роботы являются отличным примером наступившей эры Индустрия 4.0.
Об авторе
Славой Мусилек (Slavoj Musílek), генеральный директор Universal Robots в Центральной и Восточной Европе, России и СНГ
—-
За новостями робототехники и ИИ удобно следить в телеграм-канале prorobots — основные новости; телеграм-трансляции, посвященных робототехнике, еще больше новостей — в телеграм-канале prorobotsRealTime — подпишитесь на него прямо сейчас! Также вы можете подписаться на Facebook страницу prorobots.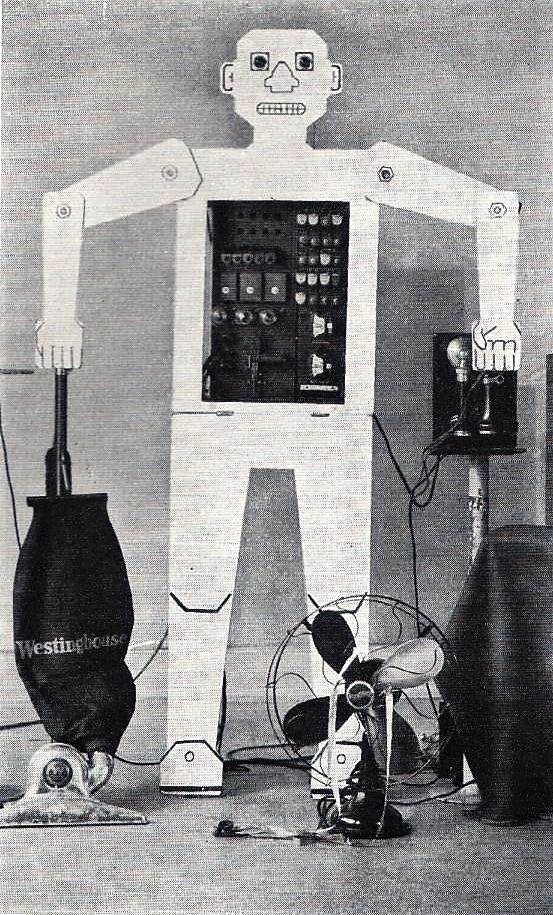
История робототехники: как выглядели самые первые роботы?
Вот уже несколько сотен лет подряд человечество хочет максимально облегчить себе жизнь, переложив выполнение сложных задач на плечи роботов. И это у нас весьма хорошо получается, потому что уже сегодня любой желающий может купить робота-пылесоса за не такие уж и большие деньги и забыть о мытье полов. В больницах некоторых стран стран частью персонала являются роботы, предназначенные для ухаживания за пациентами. А на заводах производственные механизмы в автоматическом режиме собирают электронику и даже огромные автомобили. Но когда человечество вообще задумалось о разработке роботов и когда изобретателям удалось их создать? Многие скажут, что первого робота в мире создал всем известный Леонардо да Винчи — ведь неспроста среди его документов имелась схема сборки человекоподобного механизма? Но, на самом деле, первые роботы были созданы задолго до рождения итальянского художника и ученого.
«Мистер Телевокс» — один из первых американских роботов
Содержание
- 1 Какие бывают роботы?
- 2 Первые роботы в истории
- 3 Робот Леонардо да Винчи
- 4 Первый робот-музыкант
- 5 Первый советский робот
- 6 Современные роботы
Какие бывают роботы?
Слово «робот» произошло от слова robota, что можно перевести как «подневольный труд». То есть то, что называется «роботом», вопреки своей воле должно выполнять команды и по своей сути являться рабом. А если быть точнее, термин подразумевает под собой устройство, которое предназначено для выполнения определенного рода действий по заранее заданной инструкции. Обычно роботы получают информацию об окружающей обстановке со встроенных датчиков, которые играют роль органов чувств. А выполнением задач они занимаются либо самостоятельно, следуя заложенной программе, либо повинуясь командам другого человека. Назначение роботов может быть разным, начиная от развлечения людей и заканчивая сборкой сложных устройств.
То есть то, что называется «роботом», вопреки своей воле должно выполнять команды и по своей сути являться рабом. А если быть точнее, термин подразумевает под собой устройство, которое предназначено для выполнения определенного рода действий по заранее заданной инструкции. Обычно роботы получают информацию об окружающей обстановке со встроенных датчиков, которые играют роль органов чувств. А выполнением задач они занимаются либо самостоятельно, следуя заложенной программе, либо повинуясь командам другого человека. Назначение роботов может быть разным, начиная от развлечения людей и заканчивая сборкой сложных устройств.
Роботы бывают разные, но главное, чтобы они не вредили людям
Интересный факт: американский писатель-фантаст Айзек Азимов (Isaac Asimov) является автором трех законов робототехники. Первый — робот не может причинить вред человеку. Второй — робот должен повиноваться всем командам человека кроме тех, которые противоречат первому закону. Третье — робот должен заботиться о себе в ой мере, которая не противоречит первому и второму законам.
Первые роботы в истории
Если верить историческим данным, первые роботы в мире были созданы примерно в 300 году до нашей эры. Тогда, на маяке египетского острова Фарос, были установлены две огромные фигуры в виде женщин. В дневное время они хорошо освещались сами по себе, а ночью загорались искусственным светом. Время от времени они поворачивались и били в колокол, а ночью издавали громкие звуки. И все это делалось для того, чтобы прибывающие корабли вовремя узнавали о приближении к берегу и готовились к остановке. Ведь иногда, при возникновении тумана или кромешной ночи, берег можно было и не заметить. И этих женщин вполне можно назвать роботами, ведь их действия точно соответствуют значению слова «робот».
Маяк на острове Фарос
Робот Леонардо да Винчи
Изобретателем одного из первых роботов считается итальянский ученый Леонардо да Винчи. Судя по документам, обнаруженным в 1950-е годы, художник разработал чертеж человекоподобного робота в 1495 году. В схемах был изображен каркас робота, который был запрограммирован выполнять человеческие движения. Он обладал анатомически правильной моделью челюсти и умел садиться, двигать руками и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня. Скорее всего, идея создать «искусственного человека» пришла в голову художнику в ходе изучения человеческого тела.
В схемах был изображен каркас робота, который был запрограммирован выполнять человеческие движения. Он обладал анатомически правильной моделью челюсти и умел садиться, двигать руками и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня. Скорее всего, идея создать «искусственного человека» пришла в голову художнику в ходе изучения человеческого тела.
Реконструкция робота-рыцаря
К сожалению, ученым не удалось найти подтверждений тому, что робот Леонардо да Винчи действительно был создан. Скорее всего, идея так и осталась на бумаге и так и не была воплощена в реальность. Зато робот был воссоздан в современности, спустя сотни лет после разработки чертежа. Сборкой робота занялся итальянский профессор Марио Таддей, который считается экспертом по изобретениям Леонардо да Винчи. При сборке механизма он строго следовал чертежам художника и в конечном итоге создал то, чего хотел добиться изобретатель. Конечно, широкими возможностями этот робот не блещет, но зато профессор смог написать книгу «Машины Леонардо да Винчи», которая была переведена на 20 языков.
Первый робот-музыкант
Спустя несколько сотен лет после Леонардо да Винчи, попытки создать искусственного человека предпринимал французский механик Жак де Вокансон. Если верить историческим документам, в 1738 году ему удалось создать робота, строение которого полностью копирует анатомию человека. Он не мог ходить, зато отлично играл на флейте. Благодаря конструкции из множества пружин и устройств для вдувания воздуха в различные части механизма, робот-флейтист мог играть на духовом инструменте при помощи своих губ и движущихся пальцев. Демонстрация робота прошла в Париже и была описана в научном труде «Le mécanisme du fluteur automate».
Схема медной утки Жака де Вокансона
Помимо человекоподобного робота, Жак де Вокансон создал роботизированных уток из меди. По своей сути они были механическими игрушками, которые умели двигать крыльями, клевать корм и, как бы странно это не звучало, «испражняться». Сегодня такие технологии выглядели бы крайне странно. К тому же, подобные игрушки уже можно свободно купить в любом детском магазине. Там найдутся как ходячие фигурки, так и сложные роботы с дистанционным управлением. Но сотни лет назад медные утки наверняка казались чем-то волшебным.
К тому же, подобные игрушки уже можно свободно купить в любом детском магазине. Там найдутся как ходячие фигурки, так и сложные роботы с дистанционным управлением. Но сотни лет назад медные утки наверняка казались чем-то волшебным.
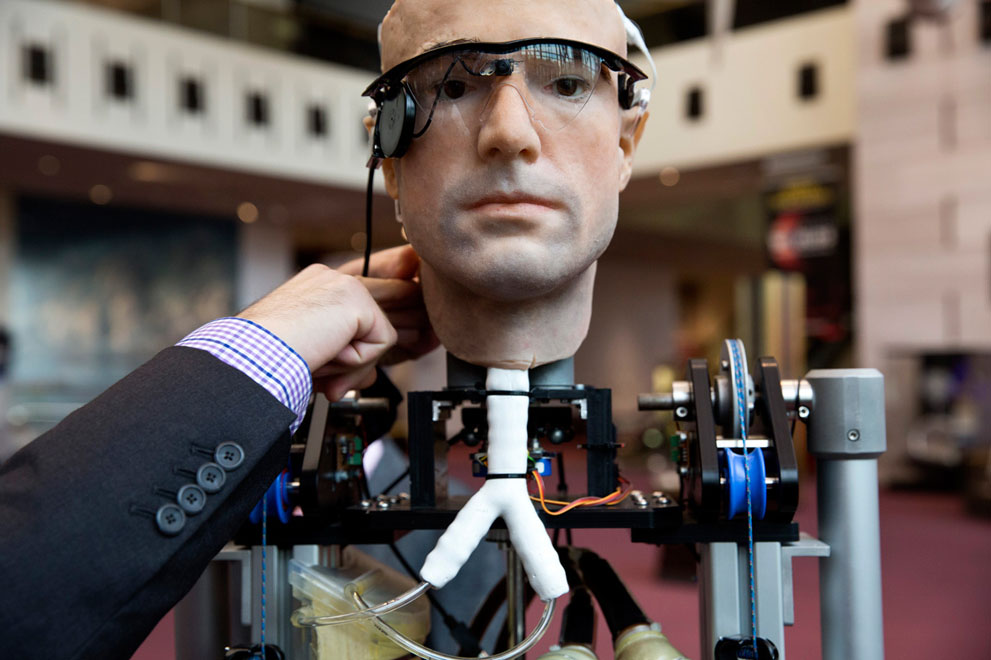
Читайте также: Как устроен самый сложный робот на Земле?
Первый советский робот
В XX веке человечество уже осознало перспективы робототехники и всерьез занялось производством роботов. В те времена инженеры хотели создать человекоподобные механизмы, но на настоящих людей они не были похожи. По современным меркам они вовсе были металлическими монстрами, которые практически ничего не умели. Так, в 1928 году, американский инженер Рой Уэнсли показал публике робота «Мистер Телевокс», который умел двигать несколькими конечностями и выполнять простые голосовые команды.
Американский «Мистер Телевокс»
Советский союз тоже не хотел оставаться в стороне. В то время как в других странах разработкой сложных механизмов занимались серьезные дяденьки в толстых очках, в первый советский робот был создан 16-летним школьником. Им оказался Вадим Мацкевич, который в восьмилетнем возрасте создал компактную радиостанцию, а в 12 лет изобрел крошечный броневик, стреляющий ракетами. Он был весьма известным мальчиком и вскоре обзавелся всеми комплектующими, необходимыми для создания полноценного робота.
Им оказался Вадим Мацкевич, который в восьмилетнем возрасте создал компактную радиостанцию, а в 12 лет изобрел крошечный броневик, стреляющий ракетами. Он был весьма известным мальчиком и вскоре обзавелся всеми комплектующими, необходимыми для создания полноценного робота.
Первый советский робот «В2М»
Советский робот «В2М» был представлен в 1936 году в рамках Всемирной выставки в Париже. Его рост составлял 1,2 метра, а для управления использовалась радиосвязь. Человекоподобный робот умел выполнять 8 команд, которые заключались в движении разными частями тела. Из-за слабости моторов, робот не мог полноценно понимать правую руку и этот жест был похож на нацистское приветствие. Из-за этого недоразумения, робот «В2М» принес мальчику множество проблем и от репрессии его спасли только юношеский возраст и поддержка со стороны начальства органа СССР по борьбе с преступностью.
Вырезка из зарубежной газеты о новой версии робота «В2М»
В 1969 году юные последователи Мацкевича создали нового робота, основанного на конструкции «В2М». Этот андроид был представлен публике в рамках японской выставки «ЭКСПО-70» и тоже привлек к себе внимание мировой общественности. А сам Вадим Мацкевич все это время занимался созданием «технических» игр для школьников написал две популярные книги: «Занимательная история робототехники» и «Как построить робот». Мацкевич умер в 2013 году и в честь него был снят документальный фильм «Как один лейтенант войну остановил».
Этот андроид был представлен публике в рамках японской выставки «ЭКСПО-70» и тоже привлек к себе внимание мировой общественности. А сам Вадим Мацкевич все это время занимался созданием «технических» игр для школьников написал две популярные книги: «Занимательная история робототехники» и «Как построить робот». Мацкевич умер в 2013 году и в честь него был снят документальный фильм «Как один лейтенант войну остановил».
Современные роботы
Несмотря на все заслуги, титул «отца робототехники» принадлежит не Вадиму Мацкевичу, не Жаку де Вокансону и даже не Леонардо да Винчи. Этот титул был дан американскому инженеру Джозефу Энгельбергеру (Joseph Engelberger), который в 1956 году познакомился с изобретателем Джорджем Деволом (George Devol). Спустя три года со дня знакомства, они представили миру производственного робота Unimate #001. Впоследствии механизм был несколько раз усовершенствован и появился первый робот для сборки автомобилей. Его установили на одном из заводов General Motors для помощи в литье деталей.
Unimate #001 — первый промышленный робот
На протяжении следующих десятилетий робототехника скакнула далеко вперед. Примерно с 1970 по 2000 годы инженеры придумали множество новых датчиков и контроллеров, которыми можно управлять при помощи разных языков программирования. Роботы в современном обличье появились в 1999 году, когда компания Sony представила робота-собаку по кличке AIBO. Она ведет себя живой организм и умеет выполнять практически все собачьи команды.
История роботов AIBO
Вскоре после этого разработкой роботов занялась компания Boston Dynamics. О ней мы часто рассказываем на нашем сайте, а новости об обновлениях фирменных роботов публикуем в нашем Telegram-канале. Разумеется, до совершенства созданным роботам еще далеко и инженерам предстоит проделать много работы.
История роботов — Академия робототехники Аделаиды
История роботов берет свое начало в древнем мире. Концепции, похожие на робота, можно найти еще в 4 веке до нашей эры, когда греческий математик Архит из Тарента постулировал механическую птицу, которую он назвал «Голубь», которая приводилась в движение паром.
Один из первых зарегистрированных проектов человекоподобного робота был сделан Леонардо да Винчи (1452–1519) примерно в 1495 году. Тетради Леонардо, вновь открытые в 1950-х годов, содержат подробные рисунки механического рыцаря в доспехах, который мог сидеть, махать руками и двигать головой и челюстью.
Около 1700 года было построено множество автоматов, некоторые из которых могли действовать, рисовать, летать или играть музыку; некоторые из самых известных произведений того периода были созданы Жаком де Вокансоном в 1737 году, в том числе флейтист-автомат, барабанщик и его самая известная работа «Переваривание утки». Утка Вокансона питалась от веса и могла имитировать настоящую утку, взмахивая крыльями (только в каждом крыле было более 400 частей), поедать зерно, переваривать его и испражняться, выделяя вещества, хранящиеся в скрытом отсеке.
Японский мастер Хисасиге Танака, известный как «Японский Эдисон», создал множество невероятно сложных механических игрушек, некоторые из которых могли служить чаем, стрелять стрелами из колчана или даже рисовать японский иероглиф кандзи .
Первым роботом-гуманоидом был солдат с трубой, сделанный в 1810 году Фридрихом Кауфманном в Дрездене, Германия. Робот демонстрировался как минимум до 30 апреля 1950 года.
В 1928 году один из первых роботов-гуманоидов был выставлен на ежегодной выставке Общества инженеров-модельеров в Лондоне. Изобретенный У. Х. Ричардсом, робот по имени Эрик состоял из алюминиевого доспеха с одиннадцатью электромагнитами и одним двигателем, питаемым от 12-вольтового источника питания. Робот мог двигать руками и головой и управляться с помощью пульта дистанционного управления или голосового управления.
В 1939 году на Всемирной выставке появился робот-гуманоид, известный как Электро. Он был ростом 2,1 м, весил 120 кг, мог ходить по голосовой команде, говорить около 700 слов (используя проигрыватель со скоростью 78 оборотов в минуту), курить сигареты, надувать воздушные шары, двигать головой и руками. Корпус состоял из стального зубчатого кулачка и каркаса двигателя, обтянутого алюминиевой обшивкой.
Первые электронные автономные роботы со сложным поведением были созданы Уильямом Греем Уолтером из Неврологического института Бердена в Бристоле, Англия, в 1948 и 1949.
Первый программируемый робот с цифровым управлением был изобретен Джорджем Деволом в 1954 году и в конечном итоге получил название Unimate. Позже это заложило основы современной индустрии робототехники. Devol продал первый Unimate General Motors в 1960 году, а в 1961 году он был установлен на заводе в Трентоне, штат Нью-Джерси, для подъема горячих кусков металла из машины для литья под давлением и их штабелирования. Патент Devol на первую программируемую роботизированную руку с цифровым управлением представляет собой основу современной индустрии робототехники.
В 1969 году студент-механик Виктор Шейнман создал Стэнфордскую руку, признанную первой роботизированной рукой с электронным управлением, управляемой компьютером.
Первый мобильный робот, способный рассуждать об окружающей среде, Shakey, был построен в 1970 году Стэнфордским исследовательским институтом. Шейки объединил несколько сенсорных входов, включая телекамеры, лазерный дальномер и датчики ударов для навигации.
Шейки объединил несколько сенсорных входов, включая телекамеры, лазерный дальномер и датчики ударов для навигации.
Биомиметический робот RoboTuna был построен докторантом Дэвидом Барреттом в Массачусетском технологическом институте в 1996, чтобы изучить, как рыбы плавают в воде. RoboTuna спроектирован так, чтобы плавать и напоминать голубого тунца.
В 1999 году Sony представила AIBO, роботизированную собаку, способную взаимодействовать с людьми; первые модели, выпущенные в Японии, были распроданы за 20 минут.
В 2000 году Honda представила самый продвинутый результат своего гуманоидного проекта под названием ASIMO. ASIMO может бегать, ходить, общаться с людьми, распознавать лица, окружающую среду, голоса и позы, а также взаимодействовать с окружающей средой.
Популярный робот-пылесос Roomba был впервые выпущен в 2002 году компанией iRobot.
25 октября 2017 года на саммите Future Investment Summit в Эр-Рияде роботу по имени София было предоставлено гражданство Саудовской Аравии, став первым роботом, имеющим гражданство.
(Википедия)
РОБОТЫ: В начале
Вернуться на СТРАНИЦУ МОДУЛЯ
Джереми Готтлиб: Автор
Дэвид Лич Андерсон: Автор
Роботы — это машины, которые дополняют или улучшают деятельность человека. Они могут сделать это несколькими способами:
I. Предыстория роботов
Люди были очарованы «искусственными существами» на протяжении тысячелетий.
- Древние евреи писали о человеке, сделанном из земли и глины, называемом големом . Голем был создан, чтобы помогать в черной работе.
- Считалось, что древнегреческий бог Гефест строил себе механических помощников из золота.
- Около 400 г. до н. э. греческий математик Архит из Тарента построил механическую птицу, чтобы попытаться лучше понять, как птицы летают.
- Около 1495 года Леонардо да Винчи публикует чертежи механического рыцаря. В течение следующих 400 лет будет построено несколько игрушечных автоматов, в основном для развлечения членов королевской семьи.

- Слово «робот» впервые употребил в 1921 году чешский драматург Карел Чапек в пьесе « руб.». (Универсальные роботы Россум) . В пьесе рассказывается о фабрике, которая строит искусственных людей, которые будут служить людям.
- В 1926 году, Метрополис 9«0055» стал первым фильмом, в котором на экране изображен робот-гуманоид.
- В 1927 году Westinghouse строит робота Televox
II. Ранние роботы
В 20 веке был изобретен цифровой компьютер. Исследователи быстро начали называть компьютер «электронным мозгом» и начали думать о способах создания роботов с компьютерным мозгом.
Первым современным программируемым роботом был Unimate . General Motors установила первого робота для работы на заводе в 1961 для перемещения кусков горячего металла. Unimate был автономным, предварительно запрограммированным роботом, который неоднократно выполнял одну и ту же опасную задачу.
В 1966 году в Стэнфорде был изобретен робот Shakey . Шейки был первым автономным интеллектуальным роботом, который самостоятельно принимал решения о том, как себя вести. Шейки можно было дать общие инструкции, такие как «переместить блок на стол», и он обдумал бы, как выполнить задачу. Это включает осмотр комнаты, идентификацию блока и стола, а затем выяснение того, как доставить блок к столу, включая обход любых препятствий в комнате. В 2004 году Шейки был введен в Зал славы роботов Каренеги Меллон.
III. Взрыв роботов
По мере того, как компьютеры становились все более мощными, исследования в области робототехники развивались в различных направлениях:
- Исследователи искусственного интеллекта добились значительных успехов в создании интеллектуальных автономных машин. Эти машины были усовершенствованием Shakey, которые могут решать более широкий круг задач; транспортные средства, которые могут двигаться, плавать или летать самостоятельно; или роботы, моделирующие поведение животных, от насекомых до собак.