Содержание
Утрата верхних конечностей перестанет быть серьезной проблемой – Наука – Коммерсантъ
6K
2
9 мин.
…
Рука человека — универсальный инструмент, способный как выполнять силовые операции, так и аккуратно и надежно удерживать хрупкие предметы. Утрата верхних конечностей является одной из древнейших проблем человечества, решение которой стало возможным благодаря научному и техническому прогрессу.
Предыдущая фотография
С каждой новой моделью бионические протезы верхних конечностей по виду и функциональности все больше приближаются к человеческим рукам
Фото:
Коммерсантъ / Юрий Мартьянов
/ купить фото
Stradivary (Моторика, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Следующая фотография
1
/
4
С каждой новой моделью бионические протезы верхних конечностей по виду и функциональности все больше приближаются к человеческим рукам
Фото:
Коммерсантъ / Юрий Мартьянов
/ купить фото
Stradivary (Моторика, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
Kleiber Solo (Клайбер Бионикс, Россия)
От железной руки до бионического протеза
Задачу замены утраченных конечностей человечество пыталось решить еще в античности. Самым известным протезом средневековья является «железная рука» рыцаря фон Берлихингена, сделанная в 1504 году. Протез был похож на железную перчатку с пятью пальцами, которые с помощью шестерни могли поворачиваться и фиксироваться, что позволяло удерживать предметы или оружие. Крепился протез к руке кожаными ремнями. Примерно в ту же эпоху подвижные искусственные конечности сконструировал француз Амбруаз Паре. В начале XIX века немецкий стоматолог и хирург Петер Балифф придумал способ управлять пальцами протеза при помощи движения локтевого сустава. Для этого были использованы тяги, закрепленные на плече пациента так, что при разгибании локтевого сустава пальцы разгибались и, наоборот, для захвата предмета протезом необходимо было согнуть локоть.
Самым известным протезом средневековья является «железная рука» рыцаря фон Берлихингена, сделанная в 1504 году. Протез был похож на железную перчатку с пятью пальцами, которые с помощью шестерни могли поворачиваться и фиксироваться, что позволяло удерживать предметы или оружие. Крепился протез к руке кожаными ремнями. Примерно в ту же эпоху подвижные искусственные конечности сконструировал француз Амбруаз Паре. В начале XIX века немецкий стоматолог и хирург Петер Балифф придумал способ управлять пальцами протеза при помощи движения локтевого сустава. Для этого были использованы тяги, закрепленные на плече пациента так, что при разгибании локтевого сустава пальцы разгибались и, наоборот, для захвата предмета протезом необходимо было согнуть локоть.
После Второй мировой войны для передачи движения пальцам протеза стали использоваться электрические двигатели. В конце 1960-х годов была разработана первая миоэлектрическая система управления, в основе которой лежат методы регистрации и анализа мышечных биопотенциалов (электромиограмма, ЭМГ) человека. Несколько электродов закрепляются на поверхности кожи человека и позволяют измерять электрические импульсы, которые возникают при напряжении и расслаблении мышцы. Эти импульсы через электронные преобразователи передаются к моторам, которые перемещают пальцы. Таким образом, при помощи напряжения и расслабления определенной группы мышц человек может управлять работой протеза. Такие протезы называются бионическими (от древнегреч. — живущее), то есть являются решениями, непосредственно заимствованными у живой природы.
Несколько электродов закрепляются на поверхности кожи человека и позволяют измерять электрические импульсы, которые возникают при напряжении и расслаблении мышцы. Эти импульсы через электронные преобразователи передаются к моторам, которые перемещают пальцы. Таким образом, при помощи напряжения и расслабления определенной группы мышц человек может управлять работой протеза. Такие протезы называются бионическими (от древнегреч. — живущее), то есть являются решениями, непосредственно заимствованными у живой природы.
Четыре вида протезов
«Железная рука» рыцаря фон Берлихингена, сделанная в 1504 году
Фото: wikimedia.org
Протезы верхних конечностей разделяются на две основные группы — пассивные (косметические и функциональные) и активные (тяговые и миоэлектрические).
Косметические протезы являются высококачественными муляжами здоровой руки, хотя и позволяют выполнять некоторые простые действия, например, поддерживание и толкание предметов. При этом технологии производства косметических протезов могут быть использованы при изготовлении съемных оболочек активных протезов.
При этом технологии производства косметических протезов могут быть использованы при изготовлении съемных оболочек активных протезов.
К функциональным протезам относятся протезы с возможностью смены насадок, которые могут быть выполнены в виде различных инструментов — крюк, зажим, кольцо, гаечный ключ, молоток и др.
Kleiber Trio (Клайбер бионикс, Россия)
Тяговые протезы представляют собой простейшую версию активных протезов и приводятся в движение при помощи сгибания локтевого сустава, вследствие чего обладают ограниченной функциональностью за счет всего лишь одного варианта сжатия пальцев.
Электромеханические роботизированные (бионические) протезы являются наиболее эффективными решениями для протезирования, так как способны более точно копировать кинематику кисти руки здорового человека за счет использования нескольких независимых приводов для пальцев. Использование большего числа степеней свободы (как правило, пяти-шести) по сравнению с тяговыми протезами позволяет управлять положением пальцев, за счет чего становится возможным выполнение сложных сочетаний движений и реализация разнообразных положений пальцев (паттернов), что позволяет эффективнее захватывать предметы.
Особенности бионических протезов
Последнее десятилетие отмечено высокой активностью среди разработчиков антропоморфных манипуляторов захвата для роботов и бионических протезов рук. В подобных манипуляторах для роботов (DLR Hand II Аэрокосмического центра Германии, Shadow Dexterous Hand компании Shadow Robotics) используются до 22 приводов для управления пальцами, применяются тактильные сенсоры на контактных площадках. Система управления позволяет автоматически схватывать предметы различных форм. Но в качестве протезов подобные решения использоваться не могут из-за большой массы и габаритов предплечья, в котором размещаются сервоприводы. Поэтому, в отличие от антропоморфных манипуляторов, для роботов в бионических протезах используются ограниченный набор приводов и специальная конструкция пальца, в которой дистальная фаланга объединяется с медианной для снижения числа подвижных элементов. Это необходимо, чтобы снизить массу протеза и разместить электронику и моторы внутри кисти, так как автономная кисть позволяет выполнять протезирование с различной степенью ампутации предплечья.
Luke Arm (DEKA Research, США)
Своими успехами разработчики бионических протезов обязаны последним достижениям науки и техники в области аккумуляторов высокой плотности, появлению различных сенсорных устройств, позволяющих бионической руке чувствовать и ощущать взаимодействие с объектами подобно человеку, компактных электрических моторов, высокая эффективность которых обусловлена прогрессом в области производства магнитов на основе редкоземельных металлов. А также микропроцессорам, способным с высокой скоростью обрабатывать информацию от множества сенсоров и принимать решение по управлению приводами пальцев для достижения заданного положения.
Благодаря 22 степеням свободы кисть человека позволяет выполнять сложные сочетания движений, захватывать предметы различной формы. Развитая система осязания дает возможность захвата предметов на ощупь, а также надежно удерживать и выполнять манипуляции.
Современные бионические протезы обладают широким набором вариантов сжатия, специально разработанных для повседневных задач. Управление режимами работы таких протезов может осуществляться как за счет регистрации биопотенциалов на остаточных группах мышц пользователя, так и электрической активности головного мозга, либо при помощи специальной панели управления.
Управление режимами работы таких протезов может осуществляться как за счет регистрации биопотенциалов на остаточных группах мышц пользователя, так и электрической активности головного мозга, либо при помощи специальной панели управления.
DynamicArm (OttoBock, Германия)
Для пользователя на данный момент недоступно непосредственное управление движением каждого отдельного пальца протеза. Это обусловлено отсутствием коммерческих решений для интеграции с существующими бионическими протезами, а также сложностью в реализации устройств многоканального захвата биосигналов человека. В лаборатории прикладных кибернетических систем МФТИ под руководством Т.К. Бергалиева ведутся разработки в области человеко-машинных интерфейсов на основе биосигналов человека. В частности, там разработана восьмиканальная система управления на основе ЭМГ-сигналов, позволяющая регистрировать интегральную активность мышц предплечья, повышая тем самым количество управляемых степеней свободы. Для коммерциализации разработанной технологии была создана компания ООО «Гальвани-Бионикс», получившая поддержку Фонда содействия развитию малых форм предприятий в научно-технической сфере.
Для коммерциализации разработанной технологии была создана компания ООО «Гальвани-Бионикс», получившая поддержку Фонда содействия развитию малых форм предприятий в научно-технической сфере.
Michelangelo (OttoBock, Германия)
Будущий пользователь может научиться пользоваться протезом с помощью специального программного обеспечения, позволяющего посредством миоэлектрических сенсоров управлять виртуальной моделью будущего протеза. К обучению можно приступать уже на ранних послеоперационных стадиях подготовки к установке бионического протеза, так как для установки протеза требуется изготовить индивидуальную приемную гильзу и может пройти продолжительное (до шести месяцев) время до сформирования окончательной культи.
Зарубежные разработчики протезов часто уделяют преувеличенное внимание количеству паттернов движения (жестов) пальцев, которое иногда доходит до 15-20. Для повседневного использования такое избыточное число не требуется и даже может создать неудобство, так как в течение дня приходится часто переключаться между наиболее подходящими паттернами, при этом используются, как правило, пять-шесть вариантов. При помощи бионических протезов человек может выполнять различные бытовые действия: пользоваться электро- и столовыми приборами, работать за компьютером, перемещать предметы и сумки, открывать емкости и бутылки, гладить белье, одеваться и многое другое.
При помощи бионических протезов человек может выполнять различные бытовые действия: пользоваться электро- и столовыми приборами, работать за компьютером, перемещать предметы и сумки, открывать емкости и бутылки, гладить белье, одеваться и многое другое.
Российские разработки
Технически различаются два варианта компоновки бионических протезов:
- Размещение моторов внутри ладони (BeBeonic 3 (OttoBock, Германия, 2012), Michelangelo Hand (OttoBock, Германия,2011), «Миотея» ПР2-Б1 («НПФ Галатея», РФ, 2005), Stradivary (ООО «Моторика», РФ, 2016))
- Размещение моторов внутри пальцев и, как следствие, возможность протезировать отдельные пальцы (iLimb Ultra (OSSUR, Исландия, 2008), Evolution 2 (Vincent Systems, Германия, 2015), Kleiber Solo (ООО «Клайбер Бионикс», РФ, 2016)).
Основные преимущества перспективных современных бионических протезов заключаются в следующем:
- Способность надежно захватывать предметы разных форм
- Аккуратный автоматический захват хрупких предметов с учетом развиваемых усилий
- Возможность «осязания» объектов взаимодействия за счет обратной тактильной связи
- Поворот кисти за счет дополнительных приводов
- Стабилизация предмета за счет управления положением запястного сустава.


В России в настоящее время на рынке представлен только один бионический протез «Миотея» компании «НПФ «Галатея»», разработанный более десяти лет назад. «Миотея» является наиболее доступным решением, имеет одну степень свободы и может управляться при помощи одно- или двухканальной системы. В первом случае закрытие и раскрытие кисти производится при помощи одной мышцы, во втором используются разные мышцы. Данный протез значительно уступает по функциональности зарубежным.
Перспективными разработками доступных бионических протезов, не уступающих зарубежным аналогам по функциональности, занимаются отечественные компании ООО «Моторика» (Stradivary) и ООО «Клайбер Бионикс» (Kleiber Solo).
Vincent Evolution 2 (VINCENTsystems, Германия)
Компания «Моторика» представила первый в России детский активный тяговый протез «Киби», предназначенный для выполнения захвата небольших предметов. «Киби» изготавливается по индивидуальным меркам по технологии селективного лазерного спекания порошка. В настоящее время компания «Моторика» разрабатывает предсерийный прототип бионического протеза кисти Stradivary, обладающего шестью степенями свободы с размещением приводов внутри ладони. Протез Stradivary планируется оснащать специальным модулем с функцией умных часов.
В настоящее время компания «Моторика» разрабатывает предсерийный прототип бионического протеза кисти Stradivary, обладающего шестью степенями свободы с размещением приводов внутри ладони. Протез Stradivary планируется оснащать специальным модулем с функцией умных часов.
MyoFacil (OttoBock, Германия)
Линейка разрабатываемых протезов Kleiber компании «Клайбер Бионикс» предназначается для людей с различной степенью ампутации верхних конечностей. Ключевой особенностью этих протезов является использование тактильных сенсоров, размещаемых на подушечках пальцев. Конструктивно тактильный сенсор представляет собой группу контактных площадок, покрытых иммерсионным золотом, поверх которой располагается чувствительный эластомер — композит квантового туннелирования (QTC). Это материал, который в нормальном состоянии является изолятором, но становится проводящим под действием внешних факторов: давления, натяжения или скручивания. Тактильный сенсор позволяет измерять не только нормальную составляющую приложенного воздействия, но и тангенциальную. Измерение последней позволяет значительно улучшить качество системы управления захватом, обеспечивая определение момента начала проскальзывания удерживаемого объекта. Протез дает возможность осязания взаимодействия с предметами, что обеспечивает аккуратный захват легких и хрупких предметов, а пользователь получает обратную тактильную связь. Кисть Kleiber Solo представляет собой сменный модуль, приводимый в движение шестью приводами, который может быть установлен на персональную культеприемную гильзу, а также предназначается для работы в составе протезов руки Kleiber Duo и Trio.
Тактильный сенсор позволяет измерять не только нормальную составляющую приложенного воздействия, но и тангенциальную. Измерение последней позволяет значительно улучшить качество системы управления захватом, обеспечивая определение момента начала проскальзывания удерживаемого объекта. Протез дает возможность осязания взаимодействия с предметами, что обеспечивает аккуратный захват легких и хрупких предметов, а пользователь получает обратную тактильную связь. Кисть Kleiber Solo представляет собой сменный модуль, приводимый в движение шестью приводами, который может быть установлен на персональную культеприемную гильзу, а также предназначается для работы в составе протезов руки Kleiber Duo и Trio.
iLimb Ultra (TouchBionics, Шотландия)
Пользователи протезов Kleiber и Stradivary могут самостоятельно настраивать конфигурацию или выбирать из набора готовых паттернов захвата при помощи специальных мобильных приложений, управление протезами осуществляется при помощи миоэлектрических модулей, входящих в комплект поставки. Заряда аккумуляторов хватает на 10-12 часов активной работы. Стоимость бионических протезов Kleiber и Stradivary в несколько раз ниже зарубежных аналогов.
Заряда аккумуляторов хватает на 10-12 часов активной работы. Стоимость бионических протезов Kleiber и Stradivary в несколько раз ниже зарубежных аналогов.
Также компания «Клайбер Бионикс» совместно с разработчиком сервоприводов «РУ.Роботикс» проводят разработку бионического протеза руки выше локтевого сустава Kleiber Duo и Trio. В этих протезах для движения локтевого и плечевого суставов используются до четырех дополнительных приводов. Так, бионические протезы рук для пациентов с ампутацией выше локтевого сустава в данный момент представлены в США (APL’s Modular Prosthetic Limb Университета Джонса Хопкинса и Arm System исследовательского центра DEKA Research) и Германии (DynamicArm компании OttoBock). Для управления такими протезами используются многоканальные системы регистрации биопотенциалов.
Эффект «зловещей долины»
Одной из задач при разработке бионических протезов является преодоление так называемого эффекта «зловещей долины». В 1978 году японский ученый Масахиро Мори при исследовании эмоциональных реакций на внешний вид роботов обнаружил, что люди с симпатией относятся к антропоморфным механизмам до определенного предела человекоподобия. Максимальное же сходство с человеком, наоборот, вызывает у них тревогу, отвращение и страх. Этот крутой провал на графике зависимости симпатии окружающих от человекоподобия робота и получил название «зловещей долины».
В 1978 году японский ученый Масахиро Мори при исследовании эмоциональных реакций на внешний вид роботов обнаружил, что люди с симпатией относятся к антропоморфным механизмам до определенного предела человекоподобия. Максимальное же сходство с человеком, наоборот, вызывает у них тревогу, отвращение и страх. Этот крутой провал на графике зависимости симпатии окружающих от человекоподобия робота и получил название «зловещей долины».
Эффект «зловещей долины» распространяется и на людей, использующих протезы. Одним из способов изменить отношение к таким людям является популяризация протезно-ортопедического оборудования. Это происходит, например, во время Паралимпийских игр, а также впервые прошедших в прошлом году в Швейцарии соревнований среди людей с ограниченными возможностями Cybathlon, в которых одной из дисциплин было соревнование среди пользователей роботизированных протезов рук на ловкость и скорость выполнения манипуляций с предметами.
Возможное будущее (2025 год)
Миотея (НПФ Галетея)
Благодаря достижениям науки и техники люди с ограниченными возможностями смогут в значительной степени восстановить функциональность руки и способность к самообслуживанию. Утрата верхних конечностей перестанет быть серьезной проблемой, влекущей за собой потерю трудоспособности. Ежегодно будут проводиться специальные соревнования среди людей с бионическими протезами, заявки на выплату компенсаций за установку бионических протезов руки начнут приниматься в режиме одного окна, а время восстановления утраченной трудоспособности из-за различной степени ампутаций составит не более двух недель. Но главное, здоровые люди перестанут испытывать дискомфорт при общении с людьми-«киборгами», а роботизированные протезы будут восприниматься как один из гаджетов, наподобие умных часов.
Утрата верхних конечностей перестанет быть серьезной проблемой, влекущей за собой потерю трудоспособности. Ежегодно будут проводиться специальные соревнования среди людей с бионическими протезами, заявки на выплату компенсаций за установку бионических протезов руки начнут приниматься в режиме одного окна, а время восстановления утраченной трудоспособности из-за различной степени ампутаций составит не более двух недель. Но главное, здоровые люди перестанут испытывать дискомфорт при общении с людьми-«киборгами», а роботизированные протезы будут восприниматься как один из гаджетов, наподобие умных часов.
Иван Кречетов
Ученые доработали чувствительный протез руки
Американские исследователи разработали и
испытали бионический протез кисти, который позволяет человеку чувствовать, к
чему он прикасается. О процессе разработки, возможностях и перспективах
устройства рассказал в IEEE Spectrum глава Лаборатории функциональных нервных интерфейсов в Университете
Кейс-Уэстерн Дастин Тайлер (Dustin Tyler).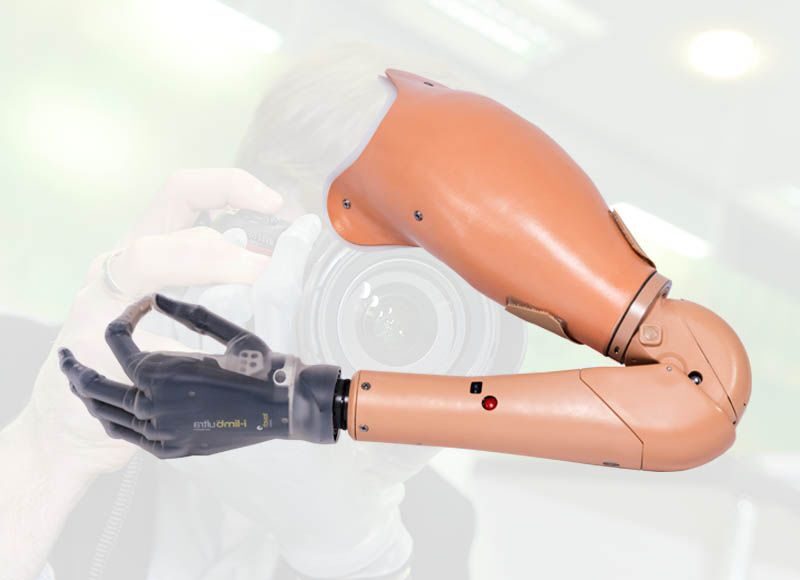
Для этого сотрудники лаборатории оборудовали
обычный бионический протез сенсорной гаптической (предназначенной для передачи
тактильной чувствительности и положения кисти) системой. Для этого в предплечья
добровольцев имплантировали специально разработанные плоские электродные
манжеты, охватывающие снаружи крупные нервы: локтевой, лучевой и срединный. В
каждой их этих манжет находится восемь контактных точек, связанных с отдельными
каналами стимуляции.
В различные части протеза поместили датчики,
реагирующие на прикосновение. Их через компьютер соединили с имплантированными
электродами так, чтобы информация от разных датчиков подавалась на нерв по
разным каналам.
В результате многолетних экспериментов и
настройки системы доброволец Игорь Спетик (Igor Spetic) смог выполнять с
помощью протеза различные тонкие действия, например, оторвать хвостик от вишни,
даже с завязанными глазами. При выключенной гаптической системе ему это удается
в 43 процентах случаев, а при включенной число успешных попыток достигает 93 процентов.
По словам самого Спетика, благодаря этой системе он ощущает протез не как
инструмент, а как собственную руку.
Работы по разработке протеза, максимально
напоминающего по функциональности человеческую кисть, ведутся в Кейс-Уэстерне и
еще нескольких кливлендских научных центрах с 2012 года. Тем не менее, по
словам Тайлера, разработка пока далека от совершенства.
В настоящее время его лаборатория создает
имплантируемые манжеты нового поколения, содержащие в четыре раза больше
электродов. Это необходимо для передачи широкого спектра ощущений: не только
тактильных, но и температурных, болевых, проприоцептивных (чувство положения
сустава). Но главное — систему необходимо сделать полностью имплантируемой, без
необходимости проводного подключения к внешнему компьютеру.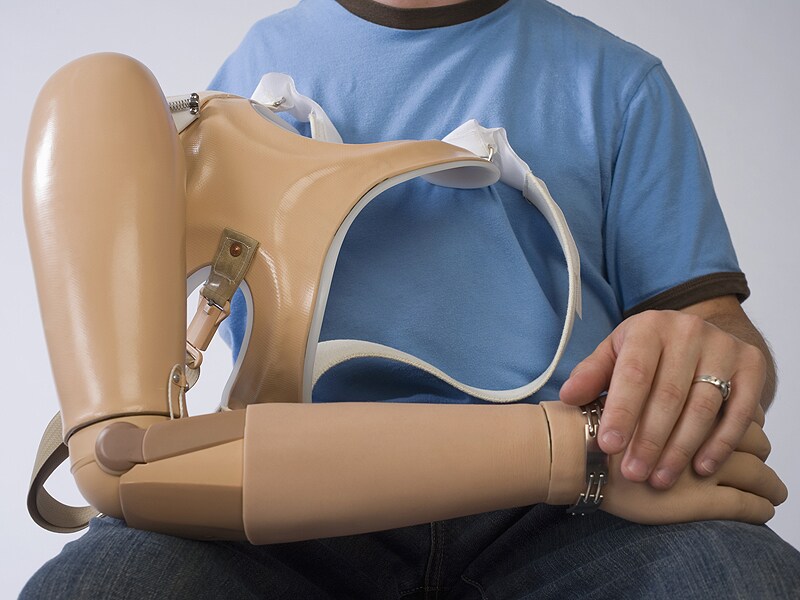
По словам Тайлера, сделать это непросто,
поскольку у системы 16 записывающих каналов и 96 каналов стимуляции, при этом
она должна работать годами имплантированной в человеческую руку. Тем не менее,
рабочий прототип автономной системы разработчики рассчитывают создать к 2019
году.
Олег Лищук
Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
«Как будто у вас снова есть рука»: сверхточный протез, управляемый разумом нервы и усилил их, чтобы обеспечить интуитивное управление роботизированной рукой в режиме реального времени на уровне пальцев.
Чтобы достичь этого, исследователи разработали способ укротить темпераментные нервные окончания, разделить толстые нервные пучки на более мелкие волокна, которые обеспечивают более точный контроль, и усилить сигналы, поступающие по этим нервам. Подход включает крошечные мышечные трансплантаты и алгоритмы машинного обучения, заимствованные из области интерфейса мозг-машина.
«Это самый большой прогресс в управлении моторикой для людей с ампутациями за многие годы», — сказал Пол Седерна, профессор пластической хирургии Роберта Онила в Медицинской школе Университета Мексики, а также профессор биомедицинской инженерии.
«Разработана методика индивидуального пальцевого управления протезами с использованием нервов культи пациента. С его помощью мы смогли обеспечить одни из самых передовых протезов, которые когда-либо видел мир».
Седерна возглавляет исследование вместе с Синди Честек, доцентом биомедицинской инженерии в Инженерном колледже UM. В статье, опубликованной 4 марта в журнале Science Translational Medicine, они описывают результаты четырех участников исследования, использующих руку Mobius Bionics LUKE. Посмотреть подробную мультимедийную презентацию о работе.
Джо Гамильтон, участник исследования RPNI Мичиганского университета, естественным образом использует свой разум, чтобы управлять протезом руки DEKA, чтобы зажать маленькую молнию на платформе для тестирования рук. Изображение предоставлено: Эван Догерти, Michigan Engineering
Интуитивное управление протезом срабатывает с первого раза
«Можно заставить протез руки делать многое, но это не значит, что человек интуитивно им управляет. Разница в том, что это работает с первой попытки, просто если подумать, и именно это предлагает наш подход», — сказал Честек. «Это сработало в самый первый раз, когда мы попробовали это. Участникам нечему учиться. Все обучение происходит в наших алгоритмах. Это отличается от других подходов».
Разница в том, что это работает с первой попытки, просто если подумать, и именно это предлагает наш подход», — сказал Честек. «Это сработало в самый первый раз, когда мы попробовали это. Участникам нечему учиться. Все обучение происходит в наших алгоритмах. Это отличается от других подходов».
Джо Гамильтон, участник исследования UM RPNI, естественным образом использует свой разум, чтобы управлять протезом руки DEKA, чтобы поднять небольшой блок. Изображение предоставлено: Эван Догерти, Michigan Engineering
Хотя участникам исследования еще не разрешено брать руку домой, в лаборатории они могли брать блоки клещевым захватом; двигать большим пальцем в непрерывном движении, а не выбирать из двух положений; поднимать предметы сферической формы; и даже играть в версию «Камень, ножницы, бумага» под названием «Камень, бумага, плоскогубцы».
«Как будто у вас снова есть рука, — сказал участник исследования Джо Гамильтон, который потерял руку в результате взрыва фейерверка в 2013 году. Это возвращает вас к ощущению нормальности».
Это возвращает вас к ощущению нормальности».
Превращение крошечного мышечного трансплантата в усилитель нервных сигналов
Одно из самых больших препятствий в управляемых разумом протезах — подключение к сильному и стабильному нервному сигналу для питания бионической конечности. Некоторые исследовательские группы, работающие в области взаимодействия мозг-машина, доходят до первоисточника — мозга. Это необходимо при работе с парализованными людьми. Но это инвазивно и рискованно.
Для людей с ампутациями периферические нервы — сеть, отходящая веером от головного и спинного мозга, — представляли интерес, но они еще не привели к долгосрочному решению по нескольким причинам: Нервные сигналы, которые они передают маленькие. И другие подходы к улавливанию этих сигналов включали зонды, которые подслушивали силой. Эти «гвозди в нервах», как их иногда называют исследователи, приводят к образованию рубцовой ткани, которая со временем затуманивает и без того слабый сигнал.
Команда U-M придумала лучший способ. Они обернули крошечные мышечные трансплантаты вокруг нервных окончаний на руках участников. Эти «регенеративные интерфейсы периферических нервов», или RPNI, предлагают разорванным нервам новую ткань, за которую можно зафиксироваться. Это предотвращает рост нервных масс, называемых невромами, которые приводят к фантомным болям в конечностях. И нервов дает мегафон. Мышечные трансплантаты усиливают нервные сигналы. Двум пациентам были имплантированы электроды в их мышечные трансплантаты, и электроды могли записывать эти нервные сигналы и передавать их протезу руки в режиме реального времени.
«Насколько мне известно, мы наблюдали самое высокое напряжение, зарегистрированное на нерве, по сравнению со всеми предыдущими результатами», — сказал Честек. «В предыдущих подходах вы могли получить 5 мкВ или 50 мкВ — очень-очень маленькие сигналы. Мы видели первые в истории милливольтовые сигналы.
«Итак, теперь мы можем получить доступ к сигналам, связанным с движением отдельного большого пальца, движением большого пальца с множественными степенями свободы, отдельными пальцами. Это открывает совершенно новый мир для людей, пользующихся протезами верхних конечностей».
Это открывает совершенно новый мир для людей, пользующихся протезами верхних конечностей».
И их интерфейс существует уже много лет. Другие деградируют в течение нескольких месяцев из-за рубцовой ткани.
Будущее исследований и производства в области протезирования
Полученные данные также открывают новые возможности в этой области, сказал Честек, чей опыт заключается в алгоритмах машинного обучения в реальном времени для преобразования нейронных сигналов в намерение движения.
«Мы обнаружили, что теперь нервные сигналы достаточно хороши, чтобы применить весь мир вещей, которые мы узнали из алгоритмов управления мозгом, для управления нервами», — сказала она.
Этот подход генерирует сигналы для более тонких движений, чем те, на которые способны современные протезы рук.
«Другие исследовательские группы также внесли свой вклад в это, но мы превзошли возможности протезов рук, которые доступны в настоящее время. Я думаю, что это сильная мотивация для дальнейших разработок компаний, производящих протезы рук», — сказал Филип Ву, научный сотрудник в области биомедицинской инженерии и первый автор статьи.
Клинические испытания продолжаются. Команда ищет участников.
«Столько раз то, что мы делаем в исследовательской лаборатории, добавляет знания в поле, но на самом деле у вас никогда не будет шанса
Во время критического сеанса тестирования для исследования UM RPNI, Алексей Васьков, кандидат робототехники . кандидат, Синди Честек, доцент кафедры биомедицинской инженерии, и Карен Сассекс, участница исследования, изучают параметры для упражнения по контролю протеза. Изображение предоставлено: Эван Догерти, Michigan Engineering
, чтобы увидеть, как это влияет на человека», — сказал Седерна. «Когда ты можешь сидеть и смотреть, как один человек с протезом делает то, что было немыслимо 10 лет назад, это так приятно. Я так рад за наших участников и еще больше рад за всех людей в будущем, которым это поможет».
Честек добавил: «Это будет далеко отсюда, но мы не собираемся прекращать работу над этим, пока не сможем полностью восстановить нормальные движения рук. Это мечта о нейропротезировании».
Это мечта о нейропротезировании».
Статья называется «Регенеративный интерфейс периферических нервов позволяет в режиме реального времени управлять искусственной рукой у людей с ампутированными конечностями». Исследование финансируется DARPA и Национальным институтом здравоохранения.
Дополнительная информация:
- Пол Седерна
- Синтия Честек
Механические протезы частичной кисти — бионика для всех
Перейти к содержимому
Опубликовано
Обычно мы не покрываем небионические устройства, но из-за отсутствия доступных бионических вариантов для людей с частичной ампутацией руки мы делаем исключение.
Различные типы механических протезов руки
С приводом от тела
Частичный протез руки с приводом от тела в основном представляет собой механическое продолжение остаточной естественной руки.
Источник: https://www.thelondonprosthetics.com/our-clinic/insights-and-case-studies/naked-prosthetics-body-driven-devices-innovative-t
Его конечная цель та же, что и у то же, что и его бионический аналог, то есть позволить пользователям хватать и удерживать объекты. Но он достигает этого с помощью строго механических средств, приводимых в действие сгибанием оставшихся мышц руки.
Степень, в которой это возможно, включая величину генерируемой силы, во многом зависит от оставшихся костей и мышц. Это может быть значительно усилено за счет изобретательного использования рычага, но если остаточная структура руки недостаточна, это может быть неправильным решением.
Механические протезы частичной кисти с храповым механизмом
Механический протез кисти с храповым механизмом не требует прямого управления мышцами, поскольку он не захватывает объекты активно. Вместо этого пользователь сгибает механические цифры вокруг объекта другой рукой. Точно настроенный храповой механизм фиксирует пальцы на месте, обеспечивая надежный захват.
Это короткое видео от Point Designs прекрасно демонстрирует этот механизм:
Вскоре мы покажем это устройство в действии.
Текущие производители
В настоящее время в этой области работают три основных производителя:
- Компания Naked Prosthetics в основном производит устройства с приводом от тела, хотя у нее есть один храповой механизм
- Point Designs производит храповые устройства
- механизированные и храповые устройства
Ниже приводится краткое описание каждого из них.
Компания Naked Prosthetics
Компания Naked Prosthetics освоила использование устройств с приводом от тела для людей с частичной ампутацией руки, что наглядно демонстрирует следующее видео:
Эти типы устройств настолько полезны, что могут существенно изменить жизнь человек с частичной ампутацией руки:
Хотя эти устройства строго механические, это не означает, что они не могут взаимодействовать с современными технологиями:
Посетите Naked Prosthetics для получения дополнительной информации.
Точно так же, как компания Naked Prosthetics освоила решения, приводимые в движение телом, Point Designs освоила решения с храповым механизмом.
Мы показали вам, как работает храповой механизм для отдельного пальца. Вот целое устройство:
Когда мы впервые увидели этот тип устройства (то есть до того, как полностью его поняли), мы задались вопросом, хватит ли его мощности для некоторых задач. Подобные видеоролики быстро дали ответ на этот вопрос:
А вот видеоролик, показывающий широкий спектр задач, которые может выполнять храповое устройство:
Но вот наше любимое видео и причина, по которой мы посвящаем тысячи часов добровольцев в год, чтобы помочь людям с особенностями конечностей понять их технологические возможности:
Это просто потрясающе!
Посетите сайт Point Designs для получения дополнительной информации.
Partial Hand Solutions LLC
Те, кто следит за нашим сайтом, знают, что мы никогда не занимаем фаворитов среди производителей протезов. Мы не принимаем деньги ни в какой форме от индустрии протезов, поэтому нам все равно, кто выиграет маркетинговую войну. Мы просто хотим, чтобы мир избавился от аспектов инвалидности, связанных с разницей конечностей.
Мы не принимаем деньги ни в какой форме от индустрии протезов, поэтому нам все равно, кто выиграет маркетинговую войну. Мы просто хотим, чтобы мир избавился от аспектов инвалидности, связанных с разницей конечностей.
При этом бывают случаи, когда нам приходится критиковать определенных производителей за то, что мы считаем довольно очевидным упущением.
Partial Hand Solutions LLC является одним из таких производителей. Кажется, у них есть отличная линейка устройств с частичной ручкой, как с питанием от тела, так и с храповым механизмом, но они, похоже, очень плохо справляются с маркетингом этих решений для широкой публики, поскольку мы не можем найти какие-либо хорошие недавние видеоролики о них. .
В результате все, что мы можем сделать, это отправить вас на страницу их продукта.
Как выбрать между различными вариантами протеза частичной кисти
Самый важный шаг к выбору правильного протеза частичной кисти — найти протезиста, хорошо знакомого с доступными технологиями.