Содержание
Как устроены роботы. Часть 1
Интересное о роботах
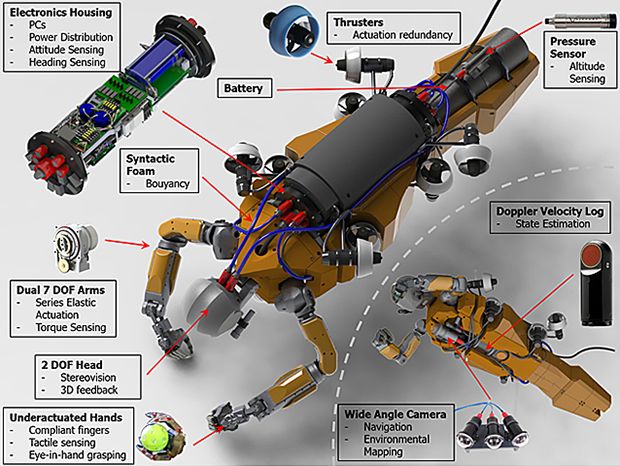
Городской робот NASA имеет программно-управляемые камеры и датчики, которые позволяют ему работать автономно в разных условиях. URBIE исследует области, которые могут представлять потенциальную опасность для человека.
На самом базовом уровне, человеческие существа состоят из пяти основных компонентов:
— Структура тела
— Мышечная система для перемещения тела
— Сенсорная система, которая получает информацию о теле и окружающей среде
— Источник питания для активации мышц и датчиков
— Мозг, который обрабатывает информацию от сенсорной системы и управляет мышцами.
Конечно, у нас есть и несколько нематериальных атрибутов, таких как интеллект и мораль, но на чисто физическом уровне они также входят в приведенный выше список.
Робот состоит из тех же самых компонентов. Типичный робот имеет подвижную физическую структуру, какой-либо электродвигатель, сенсорную систему, блок питания и компьютерный «мозг», который управляет всеми этими элементами. По существу, роботы – искусственная версия живой жизни, это машины, которые копируют поведение людей и животных.
По существу, роботы – искусственная версия живой жизни, это машины, которые копируют поведение людей и животных.
В статье далее рассмотрены основные концепции и принципы работы робототехники.
Joseph Engelberger, пионер промышленной робототехники, однажды заметил: «Я не могу определить, что такое робот, но я узнаю его, когда увижу.» Если вы рассмотрите все разнообразные типы машин, которые люди называют роботами, можно заметить, что почти невозможно придумать для них всеобъемлющего определения. Есть различные мнения о том, что представляет собой робот.
Вы, наверное, слышали что-то о некоторых из этих известных роботов:
— R2D2 и C-3PO: интеллектуальные роботы в фильмах «Звездные войны»
— Sony AIBO: роботизированная собака, которая обучается через взаимодействие с человеком
— Honda ASIMO: робот, который может ходить на двух ногах, как человек
— Промышленные роботы: автоматизированные машины, которые работают на сборочных линиях
— Человекоподобные андроиды из «Star Trek»
— Battlebots: дистанционно управляемые бойцы
— Марсоходы NASA
— HAL: бортовой компьютер корабля в фильме Стэнли Кубрика «2001: Космическая одиссея»
— Робот-газонокосилка
— Робот в телесериале «Затерянные в космосе»
— Mindstorms: популярной комплект робототехники Лего.
Все эти системы считаются роботами. К этому приводит широкое толкование слова робот. Большинство робототехников (люди, которые конструируют роботов) используют более точное определение. Они отмечают, что роботы имеют перепрограммируемый «мозг» (компьютер), который управляет телом.
Согласно этому определению, роботы отличаются от других перемещающихся машин, таких как автомобили, наличием компьютерного управления. Сегодня многие автомобили имеют бортовой компьютер, но функции его ограничены. Вы контролируете большую часть элементов управления в автомобиле непосредственно через различные механические устройства. Роботы также отличаются от обычных компьютеров своей физической конструкцией — стандартные компьютеры не имеют связанного с ними физического тела.
В следующий раз мы рассмотрим основные компоненты, из которых состоят современные роботы.
Теги: Honda ASIMO, Joseph Engelberger, URBIE, Городской робот NASA, устройство роботов, элементы робототехники
Как устроен промышленный робот? Краткий гид по структуре и движениям робота
1.
 Роботы и человек. Так ли они отличаются?
Роботы и человек. Так ли они отличаются?
Несмотря на кажущееся различие человека и промышленного робота, у них есть немало общего. Первое очевидное сходство – это суставы, места соединений костей человека и звеньев у робота, которые придают им подвижность. В основе промышленного робота лежит человеческая рука. Посмотрите на нее: кости и суставы в плече, локте и запястье, благодаря которым рука может свободно сгибаться и двигаться. По этому же принципу работает и робот, только вместо костей — звенья. Кроме того человека и робота объединяет и принцип передачи энергии звеньев к суставам для их движения.
Плечевой и локтевой суставы, кости – это звенья.
Роботы условно подразделяются на два типа в зависимости от расположения звеньев: 1) последовательно соединенные звенья и 2) независимые, параллельно соединенные звенья. Примером последовательного соединения (сочленения) является человеческая рука, поскольку ее суставы и звенья — плечо, предплечье и кисть — соединены последовательно друг за другом плечевым, локтевым и запястным суставами.
Существуют и более расширенные классификации промышленных роботов, которые рассматривают типы соединения и движение звеньев. Более подробно с видами промышленных роботов можно познакомиться в нашей статье
Какими бывают промышленные роботы? Шесть основных типов.
Рассмотрим принципы движения и внутреннюю структуру промышленных роботов.
2. Сравнение движения робота и человека
Рассмотрим механику движений робота шарнирного типа с последовательным соединением звеньев, который конструктивно схож с рукой человека.
Промышленный вертикальный шарнирный робот с последовательным соединением звеньев содержит, как правило, 6 суставов (осей).
На следующем изображении наглядно показано сравнение движений робота и человека.
Оси с 1 по 3 — это туловище и рука человека, а с 4 по 6 оси — запястье и кисть. Первые три оси перемещают кисть в пространстве, а следующие три оси двигают ей. Шестиосевая конструкция дает роботам свободу движения, даже большую, чем человеческой руке.
Предлагаем наглядно это посмотреть на видео.
3. Что нужно для движений робота? Структура робота
Далее мы рассмотрим внутреннее строение промышленного робота.
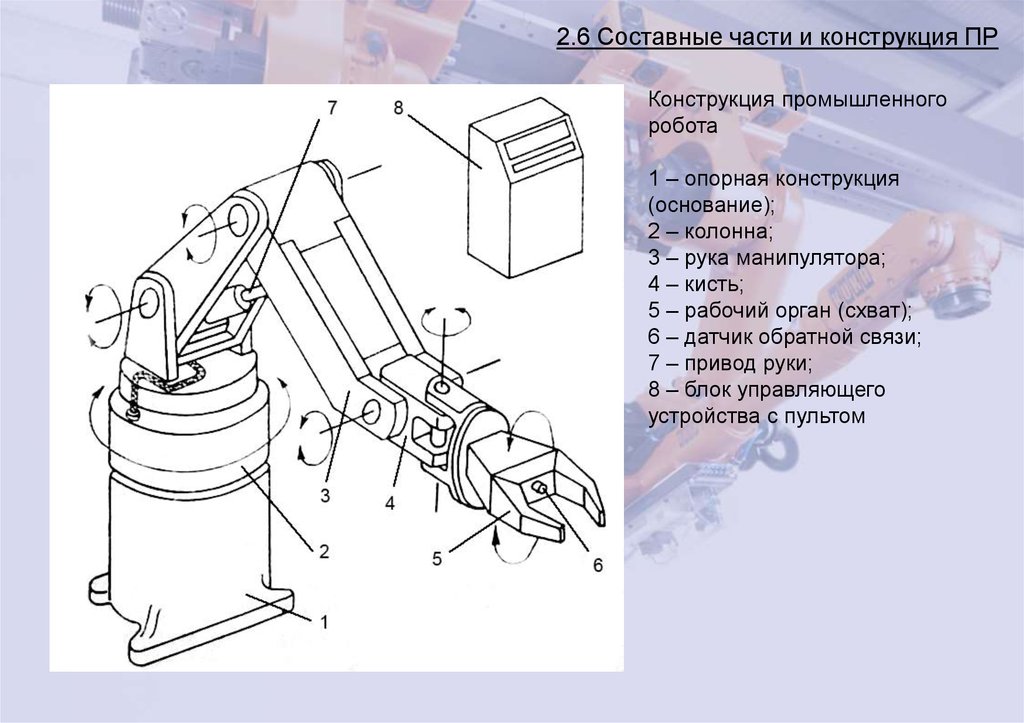
На рисунке ниже показана схема универсального шарнирного робота Kawasaki серии R малой и средней грузоподъёмности. Роботы серии R применяются для широкого спектра задач, от сборки электронных устройств до дуговой сварки. У роботов этой серии предусмотрено размещение кабелей и пневмотрубок внутри корпуса, благодаря чему удалось избежать возможных помех при работе дополнительного оборудования. Но, несмотря на это, роботы этой серии отличаются компактностью и высокой скоростью движений всех звеньев. Этот робот незаменим там, где нужен короткий цикл операций, в чем можно убедиться, симулировав работу робота в виртуальной среде, при офф-лайн программировании.
На рисунке выше наглядно видно, из чего состоит робот. Это металлическое основание робота, корпуса 1го, 2го, 3го звеньев, запястье, моторы, оборудованные энкодерами, редукторы и ременные передачи. Остановимся подробней на этих элементах робота.
Остановимся подробней на этих элементах робота.
I. Звенья
Корпус промышленного робота – сложносоставной и состоит из отдельных звеньев. Самое нижнее, нулевое звено – это основание робота. К нему через редуктор первой оси крепится, корпус первого звена, а к корпусу первого звена, через редуктор второй оси, корпус второго звена. Третье звено при помощи редуктора третьей оси, крепится к корпусу второго звена. Четвертое, пятое и шестое звенья образуют модуль называемый запястье. Запястье крепится к корпусу третьего звена через редуктор четвёртой оси.
II. Редукторы
Каждый сустав (или ось) робота состоит из мотора и редуктора. Этот узел принято называть приводом. Физически функцию сустава (сочленения), соединяющего два соседних звена робота, несут редукторы. Они представляют собой, как правило, законченное механическое устройство, с корпусом в виде составного цилиндра. С одной стороны редуктор крепится к звену N, где установлен мотор, с другой стороны к редуктору крепится корпус звена N+1.
Редукторы нижних осей (с первой по третью) обычно имеют полую середину для того чтобы сквозь них можно было провести электрические провода и пневматические трубки для следующих осей и исполнительного органа (инструмента) робота. Однако, основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода. Подобный принцип используется в велосипедной системе переключения передач. Велосипеды имеют разные размеры передних и задних звёздочек. Переключение передачи происходит переставлением цепи на звездочки разных размеров на заднем колесе.
Когда выбрана высокая передача и число оборотов колес минимизировано, усилий для вращения педалей требуется меньше, но необходимо увеличить интенсивность их вращения, но ехать по крутым склонам становиться намного проще. Таким образом итоговая мощность увеличивается, при меньшей работе приводов, в данном примере, работе ног на педалях.
Таким образом итоговая мощность увеличивается, при меньшей работе приводов, в данном примере, работе ног на педалях.
В видео описан принцип работы современного редуктора используемый в роботах.
III. Моторы
Звенья сочленённые посредством редукторов приводятся в движение, и удерживаются в определенном положении при помощи сервомоторов (серводвигателей)
Привод, функционирующий в суставе робота, позволяет перемещать руку вверх, вниз или вращать ею, преобразуя электроэнергию в механическое движение. Чаще всего в приводах роботов Kawasaki используются сервомоторы. Расположение серводвигателей в роботах серии R отмечено красными кружками на изображении ниже.
Сервомоторы — это высокопроизводительные моторы, способные точно контролировать положение и скорость, но не каждый тип сервомотора подойдет для современного промышленного робота, так как есть ряд строгих требований, например, точность перемещения до 0,01мм.
Как правило, самым распространенным источником энергии для приводов является электричество, но в некоторых моделях роботов встречается использование гидравлической или пневматической тяги. Некоторые гидравлические приводы уникальны тем, что они могут генерировать большую мощность, сохраняя высокую степень надежности.
Кстати, во роботах Kawasaki для тяжелой нагрузки используются высокопроизводительные сервомоторы переменного тока.
IV. Энкодер
Энкодер — это устройство, которое указывает положение (угол) вала вращения двигателя. При наличии энкодера, можно получить четкие данные о том, как и в каком направлении движется робот.
Самый простой – оптический энкодер, который представляет из себя диск с отверстиями, расположенными по окружности на одинаковом расстоянии друг от друга, и прикрепленный к вращающемуся валу двигателя. Перпендикулярно к двигателю расположены с одной стороны два светодиода, а с обратной стороны – фотодиод для считывания интенсивности света от светодиодов.
Когда двигатель вращается вместе с диском энкодера, свет от диодов проходит через щели или блокируется, поэтому угол и скорость вращения можно определить путем считывания сигналов с фотодиода. Это позволяет сервомоторам точно контролировать положение и скорость.
В роботах Kawasaki установлены высокоточные многооборотные абсолютные энкодеры с 32 битным разрешениям кодовых дисков. Даже при выключенном питании от контроллера, такой энкодер всегда будет фиксировать поворот в том числе более 360° так, как будет питаться от батарейки в руке робота. Поэтому при случайном сдвиге, при транспортировке или монтаже, не потребуется дополнительно настраивать изначальное положение звеньев робота.
V. Трансмиссия, ременная передача
Трансмиссия или ременная передача — является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Трансмиссия также способна изменять направление и величину мощности привода. Рассматривая велосипед в качестве примера. Цепь, которая соединяет переднюю звезду с задним колесом, является трансмиссией. Так велосипеды и передвигаются, начиная с вращения педалей и передавая вращательную энергию на заднее колесо с помощью трансмиссии.
Рассматривая велосипед в качестве примера. Цепь, которая соединяет переднюю звезду с задним колесом, является трансмиссией. Так велосипеды и передвигаются, начиная с вращения педалей и передавая вращательную энергию на заднее колесо с помощью трансмиссии.
Этот принцип также применяется внутри промышленного робота. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов, используя трансмиссионные механизмы, такие как ремни и шестерни. Такая схема применяется в запястье роботов серии R от Kawasaki, что позволило сделать запястье более компактным.
4. Инструмент робота (EOAT)
В западной литераторе можно встретить термин End of arm tooling (EOAT), что дословно переводится как инструмент на конце руки.
Люди могут выполнять различные задачи, используя инструменты, роботы недалеко ушли. Касательно промышленных роботов, как правило они производятся без основного инструмента, который должен крепиться к концу запястья робота. Это может быть захват, сварочная горелка или покрасочный распылитель и многое другое оборудование. В соответствии с задачей и технологией производства инженер на стороне поставщика или на стороне будущего владельца, дополнительно комплектуют робота необходимым оборудованием.
Это может быть захват, сварочная горелка или покрасочный распылитель и многое другое оборудование. В соответствии с задачей и технологией производства инженер на стороне поставщика или на стороне будущего владельца, дополнительно комплектуют робота необходимым оборудованием.
Если нужна универсальность, то можно установить устройство смены инструмента, и робот сможет выполнять несколько задач в рамках одного комплекса. Подробнее с инструментами, роботами и их применениями в производстве вы сможете узнать на страницах нашего сайта.
В видео ниже в качестве инструмента используется нож для надрезов будущего багета
Мы подробно рассмотрели самые важные составляющие промышленного робота, но кто управляет всем этим?
5. Мозг промышленного робота — контроллер
По определению робот это автономное устройство, способное выполнять операции в автоматическом режиме. Поэтому нужно чтобы кто-то или что-то управляло всеми компонентами робота. Этим управляющим устройством является контроллер промышленного робота.
Этим управляющим устройством является контроллер промышленного робота.
К контроллеру подключается пульт обучения робота, с помощью которого можно запрограммировать траектории его движения и создать управляющую программу по выполнению определенной последовательности действий роботом. К контроллеру промышленного робота можно подключить датчики, инструменты или других роботов и синхронизировать их действия между собой или их взаимодействие с другим оборудованием или оператором.
6. Заключение
В этой статье мы рассмотрели базовую структуру промышленных роботов. Теперь вы имеете представления какие компоненты составляют основу робота и где они расположены. Многие могут подумать, что нет необходимости знать как робот устроен, при рассмотрении вопроса внедрения роботов на свое производство. Тем не менее, эти общие знания помогут определить какой именно робот вам нужен, с каким потенциалом движений, точностью, количеством осей и каким инструментом оснастить для решения ваших производственных задач.
В нашем каталоге вы найдете подробные спецификации по роботам, а также информацию по их возможностям.
Чтобы выполнить вашу производственную задачу наиболее эффективным способом потребуется наиболее подходящий робот. Наши сотрудники всегда рады будут помочь в подборе робота и инструмента для него.
Навигация по статье:
- Роботы и человек. Так ли они отличаются?
- Сравнение робота и человека
- Что нужно для движений робота? Структура робота
- Звенья
- Редукторы
- Моторы
- Энкодер
- Трансмиссия, ременная передача
- Инструмент робота (EOAT)
- Мозг промышленного робота — контроллер
- Заключение
Материалы для оценки при проектировании и сборке надежных роботов
Robosuit использует термостойкие материалы в защитном покрытии для роботов. Источник: Roboworld
Внешний вид робота может показаться второстепенным для некоторых разработчиков робототехники, но ваш выбор материалов повлияет на его безопасность, долговечность и даже эстетику. Любой дизайн-проект должен включать рассмотрение того, как робот будет двигаться, будет ли он работать среди людей, какие задачи он будет выполнять, а также предполагаемую среду.
Любой дизайн-проект должен включать рассмотрение того, как робот будет двигаться, будет ли он работать среди людей, какие задачи он будет выполнять, а также предполагаемую среду.
Другие соображения включают простоту очистки и ремонта, вес (который влияет на общее энергопотребление), дизайн для производства и, конечно же, стоимость.
Коллаборативные роботы-манипуляторы, или коботы, сильно отличаются от автономных подводных аппаратов, воздушных дронов или других полевых роботов. Робот, работающий внутри аппарата МРТ, должен быть изготовлен из определенных материалов, в то время как стационарный робот на заводе может нуждаться в других характеристиках.
Вот некоторые материалы, о которых следует помнить при проектировании и сборке роботов.
1. Сталь
Сталь является одним из материалов, наиболее часто используемых строителями роботов. Этот прочный металл — разумный выбор, если вы строите робота, который должен выдерживать суровые условия. Во многих случаях сталь можно закалить до силы от 100 000 до 300 000 фунтов силы на квадратный дюйм (psi).
Если вы планируете закаливать сталь, ищите сталь с высоким содержанием углерода. Обычно, чем больше углерода содержится в стали, тем больше она подходит для упрочнения путем термической обработки.
Также доступны сверхизносостойкие стали, а также стали, устойчивые к частым ударам. Имейте в виду, что с этим материалом может быть сложно работать, если у вас нет подходящих инструментов, таких как те, которые используются для сварки. Это особенно верно, если вам нужно, чтобы сталь соответствовала определенной форме, чтобы упростить корпус вашего робота.
Российский роботизированный танк «Уран-9», очевидно, имеет стальную конструкцию, и его проблемы в полевых условиях были вызваны проблемами со связью, а не с материалами.
2. Резина
Растет спрос на коммерческих роботов с гибким внешним видом, например, с человеческой «кожей». Более того, коботам, работающим вместе с людьми, выгодно иметь мягкие поверхности. Резина и мягкие пластмассы могут достичь этой цели.
Более того, коботам, работающим вместе с людьми, выгодно иметь мягкие поверхности. Резина и мягкие пластмассы могут достичь этой цели.
Исследовательская группа Хьюстонского университета использовала каучуковый композитный материал для изготовления полупроводника. Электроника сохранила работоспособность даже после того, как исследователи растянули резину на 50%. Работать с традиционными полупроводниками при создании роботов сложно, потому что их легко сломать — определенно не идеальная характеристика для робота, которому нужно сгибаться.
Демонстрируя свою работу, исследователи разработали роботизированную кожу, которая может чувствовать температуру после погружения в чашку с водой. Затем, чтобы доказать широту потенциальных применений проекта, они сделали руку способной принимать компьютерные сигналы и воспроизводить их в виде американского языка жестов.
Команды из Стэнфордского университета и Национального университета Сингапура также работают над созданием роботов с полимерной кожей для осязания.
Даже если ваш робот имеет резиновую оболочку, внутри него обычно находятся твердые компоненты, включая процессоры и приводы. Однако более поздний проект включал разработку мягкого робота с компьютером, также сделанным из резины.
Роботы с резиновым корпусом обычно более безопасны, чем роботы из более твердых материалов. Кроме того, они хорошо подходят для обработки деликатных продуктов, таких как фрукты. Захваты Soft Robotics соответствуют таким объектам в задачах захвата и размещения, не повреждая их.
В некоторых тематических парках Диснея роботы взаимодействуют с гостями, и есть планы в конечном итоге расширить аниматроников, которые находятся за стеклом или удалены от людей, до уровня роботов, которые ходят по паркам. Легко понять, почему резина и пластик полезны для роботов, которые выглядят реалистично и безопаснее для работы рядом с людьми.
3. Алюминий
Хотя алюминий имеет более высокую цену, чем сталь, он легче формуется и легче. Алюминий также является хорошим материалом, если вы беспокоитесь о том, что внешний вид робота со временем заржавеет, потому что алюминий не ржавеет. Однако, поскольку он может подвергаться коррозии в некоторых влажных средах, вы можете подумать об обработке поверхности, чтобы обеспечить ей дополнительную защиту от возможной коррозии.
Еще одна особенность, которая делает алюминий популярным материалом для экстерьера роботов, заключается в том, что его можно полировать до блеска. Итак, если вы строите коммерческого робота, которым ваш клиент в конечном итоге захочет похвастаться, алюминий сделает корпус красивым, обеспечивая при этом достаточную долговечность. Вы также можете работать со специалистами, которые обеспечивают технологию полировки алюминия с трехсторонними машинами, которые позволяют программировать для удовлетворения потребностей двусторонней обработки.
Некоторые конструкторы также используют алюминий в корпусах роботов для защиты более хрупких деталей. В одном примере итальянские ученые создали робота, достаточно сильного, чтобы тянуть самолет весом 7200 фунтов по взлетно-посадочной полосе. Робот с четырьмя электродвигателями, четырьмя гидравлическими приводами и парой компьютеров размещал свои части в алюминиевом каркасе безопасности.
В одном примере итальянские ученые создали робота, достаточно сильного, чтобы тянуть самолет весом 7200 фунтов по взлетно-посадочной полосе. Робот с четырьмя электродвигателями, четырьмя гидравлическими приводами и парой компьютеров размещал свои части в алюминиевом каркасе безопасности.
4. Кевлар
Кевлар — синтетическое волокно, часто используемое для изготовления пуленепробиваемых жилетов. Некоторые из его характеристик делают его достойным внимания и для экстерьера робота. Вы можете использовать его в качестве покрытия для роботов, требующих защиты от экстремальных температур. Многие термостойкие перчатки содержат кевлар, потому что этот материал не плавится и не капает при воздействии горячей среды.
Кроме того, кевлар не разлагается при арктических температурах -50 градусов по Фаренгейту, а криогенные условия не оказывают неблагоприятного воздействия на волокна.
Roboworld Molded Products LLC производит робокостюмы, многие из которых содержат кевлар, для защиты чувствительных частей экстерьера вашего робота при высоких температурах. В то время как робокостюмы изготавливаются по индивидуальному заказу в зависимости от потребностей, тот, который включает в себя кевлар, подойдет для сварочных работ.
Робокостюм надевается на тело робота, не влияя на его сочленение или досягаемость. Эта простая в использовании защита может поддерживать функциональность робота, помогая ему выдерживать исключительно высокие или низкие температуры.
Без покрытия, подобного этим конструкциям из кевлара, низкие температуры могут неблагоприятно повлиять на консистентную смазку или другие смазочные материалы для внутренних деталей, в то время как тепло может привести к перегреву двигателей и их остановке. Внешняя крышка удерживает робота в рекомендуемом диапазоне рабочих температур, обеспечивая защиту от теплового излучения.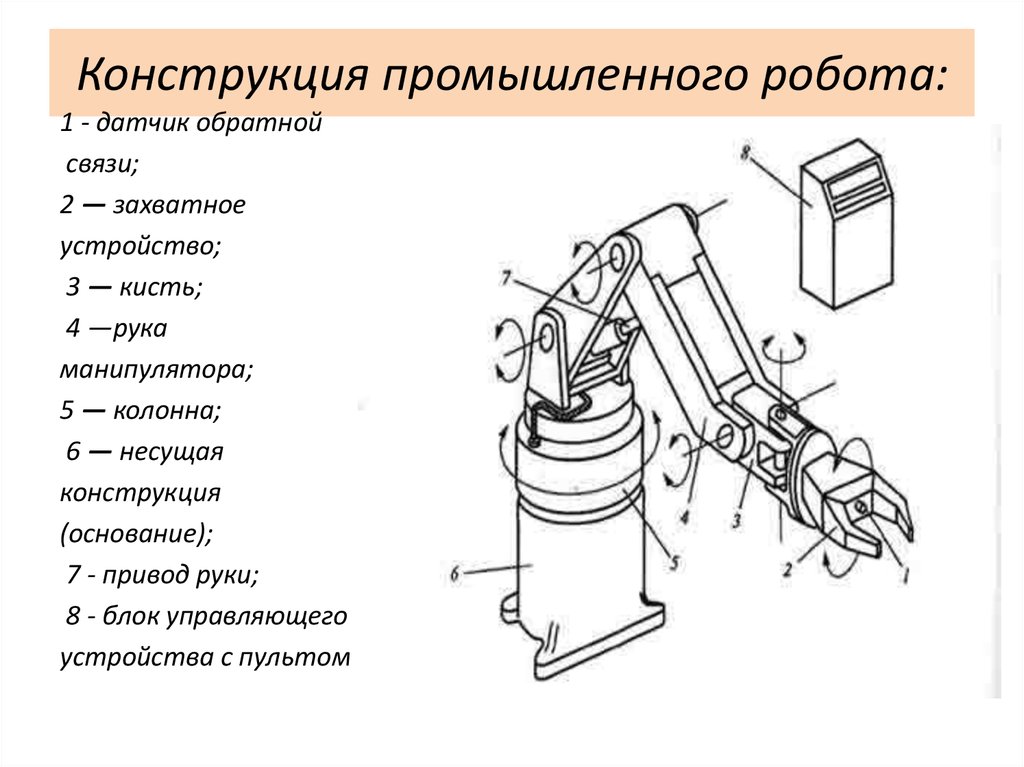
5. Биоразлагаемые «умные» материалы
Все упомянутые выше материалы относительно легко достать, и они имеют разный уровень долговечности в зависимости от потребности. Однако вы можете не знать об усилиях по созданию биоразлагаемых материалов.
Исследователи из Италии нашли способ создать роботов из биопластика, состоящего из пищевых отходов.
Поскольку большинство обычных пластмасс содержат нефть — вещество, которое способствует изменению климата, — исследователи считают, что их альтернатива поможет планете, особенно в морских зондах.
Кроме того, эти так называемые биоразлагаемые умные материалы универсальны. Ученые создали из них кожу робота и сказали, что биопластик может быть достаточно твердым и для внутренних частей.
В Великобритании специалисты Бристольской лаборатории робототехники работали над роботом, который разлагается после выполнения своей миссии. Он может помочь в поисково-спасательных работах на месте бедствия и после этого начать разрушать свое тело. Тогда людям не нужно было бы искать и забирать роботов, а биоразлагаемые материалы не наносили бы вреда планете.
Он может помочь в поисково-спасательных работах на месте бедствия и после этого начать разрушать свое тело. Тогда людям не нужно было бы искать и забирать роботов, а биоразлагаемые материалы не наносили бы вреда планете.
Инвесторы и разработчики все больше осознают необходимость разработки экологичной и устойчивой робототехники. Переработанные материалы и биоразлагаемые пластмассы в значительной степени помогут им в достижении этой цели.
Материалы, подходящие для работы робота
Это лишь вводный список некоторых из наиболее часто используемых материалов для внешней отделки роботов. Конечно, материал, который использует робот, будет зависеть в первую очередь от его назначения. Например, материалы, используемые в роботизированной хирургии, должны выдерживать строгие методы стерилизации. В этом случае такой полимер, как акрилонитрил-бутадиен-стирол (АБС), будет намного лучше, чем материал, который не соответствует медицинским требованиям и нормам.
Некоторые мягкие материалы для робототехники могут даже «чувствовать» боль и излечивать себя.
Роботы, используемые в чистых помещениях, при обработке пищевых продуктов и в водной среде, также требуют особого внимания. Например, для плавучего робота потребуется легкий и водостойкий материал. С другой стороны, биомиметическому роботу потребуется мягкое и гибкое вещество, которое можно было бы удобно захватывать и передвигать. Размышление об этих уникальных требованиях является важной частью процесса создания.
The Robot Report запустил форум Healthcare Robotics Engineering Forum, который пройдет 9-10 декабря в Санта-Кларе, Калифорния. Конференция и выставка посвящены совершенствованию проектирования, разработки и производства медицинских роботов нового поколения. Узнайте больше о форуме Healthcare Robotics Engineering Forum .
5 Основные компоненты промышленного робота
05 апреля 2022 г.
Роботы стали важным элементом процесса промышленного производства, заменяя людей повторяющейся, рискованной и трудоемкой работой, одновременно повышая производительность и качество. Технические прорывы и новые изобретательные роботы быстрее, компактнее и дешевле, чем более ранние модели. В результате роботы в настоящее время широко используются в различных секторах, таких как здравоохранение, сельское хозяйство, армия, транспорт и производство.
Технические прорывы и новые изобретательные роботы быстрее, компактнее и дешевле, чем более ранние модели. В результате роботы в настоящее время широко используются в различных секторах, таких как здравоохранение, сельское хозяйство, армия, транспорт и производство.
Промышленные роботы способны выполнять действия, подобные человеческим, такие как бег, упаковка, покраска, сварка и перенос предметов. Они предназначены для решения широкого круга задач и выполняют широкий спектр функций, поэтому для выполнения этих задач требуется широкий спектр специализированных компонентов.
В этой статье блога мы рассмотрим пять основных компонентов промышленного робота.
Компоненты промышленного робота
Основными компонентами промышленного робота являются манипуляторы, концевые эффекторы, устройства обратной связи, контроллеры и локомотивы.
1. Манипуляторы
Чтобы просто понять, что такое манипулятор, представьте его как руку робота и человеческую руку с несколькими суставами. Эти соединения или механические соединения могут двигаться в различных направлениях, чтобы выполнять работу робота.
Эти соединения или механические соединения могут двигаться в различных направлениях, чтобы выполнять работу робота.
Эти механические звенья приводятся в действие исполнительными механизмами, которые могут быть пневматическими или гидравлическими цилиндрами, гидравлическими поворотными приводами, электродвигателями, приводами и т. д. винты. Когда используются пневматические или гидравлические приводы, поток воздуха или масла к исполнительным механизмам часто контролируется клапанами, установленными на манипуляторе.
2. Концевые эффекторы
Это устройство, которое крепится к концу манипулятора для выполнения своих задач. Думайте об этом как о ладони и пальцах человеческой руки. Конечный эффектор — это компонент, который перемещает или ориентирует продукт или процесс. Он используется для специализированных задач, таких как сварка, измерение, маркировка, сверление, резка, покраска, очистка и так далее.
3. Устройства обратной связи
Это класс устройств, используемых для наблюдения за операцией или процессом, а затем для проверки выполнения операции или процесса. Вернемся к аналогии с человеческим телом. Это органы, передающие данные в мозг (контроллер).
Вернемся к аналогии с человеческим телом. Это органы, передающие данные в мозг (контроллер).
В роботе может быть установлено устройство обратной связи для определения положения различных звеньев и соединений и передачи этой информации контроллеру. Это могут быть простые концевые выключатели, приводимые в действие рукой робота, или устройства измерения положения, такие как энкодеры, потенциометры, резольверы и/или тахометры. В зависимости от используемых устройств данные обратной связи могут быть цифровыми или аналоговыми.
4. Контроллеры
Контроллер робота представляет собой компьютер, состоящий из аппаратного и программного обеспечения, связанный с роботом и по существу функционирующий как его «мозг». Контроллеры обладают всеми характеристиками, присущими компьютерам, и содержат сложные средства принятия решений и возможности хранения данных.Они инициируют и прекращают движение манипулятора через интерфейсы с регулирующими клапанами манипулятора и устройствами обратной связи, или выполняют сложные арифметические функции для управления траекторией, скоростью и положением, или обеспечивают двустороннюю связь между контроллером и вспомогательными устройствами. устройства
устройства
Рассмотрим роботизированную окрасочную систему. В этой конкретной системе используется контроллер, датчик давления и позиционер клапана для управления потоком жидкой краски к концевому исполнительному органу распылителя. Здесь датчик давления генерирует пропорциональный электрический сигнал, который подается на контроллер. Затем контроллер сравнивает входной сигнал с эталонным значением и формирует выходной сигнал для преобразователя напряжения в давление. Этот преобразователь преобразует электрический сигнал в переменный пневматический сигнал 3–15 фунтов на квадратный дюйм, который используется для управления выпускным клапаном пистолета-распылителя. Позиционер регулирует скорость потока через краскораспылитель, изменяя настройку регулирующего клапана.
Моделирование работы роботов-распылителей в программе моделирования RoboLogix
5. Локомотивы
Мышцы помогают в движении руки, пальцев и ладони человека. Для робота сила движения обеспечивается двигателями.