Содержание
Фермерам и врачам поможет робот-медуза. Посмотрите, как нежно хватают предметы ее тентакли
НовостиНаука
- Фото
- pnas.org
Чтобы захватить и удержать хрупкие объекты или предметы неправильной формы, большинству современных роботов требуются встроенные сенсоры, сложные системы обратной связи, продвинутые алгоритмы машинного обучения, при этом помноженные на навыки оператора, управляющего движениями роборуки. В случае ошибки или неточности захватное устройство может повредить, раздавить или уронить легко уязвимый объект.
Однако исследователи из Школы инженерии и прикладных наук Гарвардского университета (США) продемонстрировали, что существует гораздо более простой способ справиться с этой задачей.
Вдохновившись идеями, взятыми из самой природы, ученые разработали совершенно новый, мягкий тип захватного устройства, напоминающий по своему принципу действия медузы или осьминога и не требующий сложного планирования действий, сенсоров и контроля. Описание разработки опубликовано в журнале Proceedings of the National Academy of Sciences.
Описание разработки опубликовано в журнале Proceedings of the National Academy of Sciences.
Роборука, вместо твердых «пальцев», снабжена тонкими «щупальцами», которые мягко запутывают и крепко захватывают предметы, точно так же, как это делает медуза, опутывая своими нитями жертву. «Щупальца» представляют собой тонкие, полые внутри резиновые трубки длиной около 30 сантиметров.
Одна сторона каждой такой трубки сделана из более толстой резины, чем другие. Поэтому, когда в трубки под давлением нагоняют воздух, они начинают завиваться, как разделенный на части стебель одуванчика в воде или кудрявые волосы в дождливый день.
Каждый из таких «локонов» не обладает особой силой, и потому не может нанести объекту вред. Но все вместе, переплетаясь друг с другом и многократно оплетая предмет, «щупальца» обеспечивают надежный, крепкий захват даже очень тяжелых объектов. Чем больше петель, тем сильнее роборука. При этом такой метод удержания не способен повредить объект, каким бы хрупким он ни был. А для того, чтобы освободить его от захвата, достаточно просто сбросить давление в трубках.
А для того, чтобы освободить его от захвата, достаточно просто сбросить давление в трубках.
Как полагают разработчики, «робомедузу» можно будет использовать в сельском хозяйстве, для сбора или расфасовки фруктов и овощей, а также в медицине или на складах, где нужно перемещать хрупкие объекты неправильной формы, например, стеклянную посуду.
Татьяна Щеглова
Теги
- наука
- технологии
Сегодня читают
Тест: наденьте шапку и узнайте, какой вы человек
Найдите пару: эти котики заставят ваш мозг работать за 1 минуту
Включите логику: 10 быстрых задач о мире, в которых почти все ошибаются
Продлите молодость мозга: сложный кроссворд на общую эрудицию
Выберите собаку, а мы расскажем, сколько еще вам ждать своего счастья
Роботы-медузы оказались быстрее живых прототипов
Рынок
Технологии
 org/ListItem»>
org/ListItem»>Главная
12.07.2020Автор
Макс Волк
Принцип движения робота-медузы основан на сочетании двух слоев одного и того же эластичного полимера. Один слой предварительно растягивают, создавая так называемый напряженный слой, второй полимер не подвергается изначальному напряжению и включает в себя воздушный канал…
Инженерам-исследователям из университетов Северной Каролины (North Carolina State University) и города Темпл (Temple University) удалось, наконец, разработать полностью мягких, медузоподобных роботов. Об успешном проекте сообщило издание ScienceDaily.
При создании роботов-медуз использовались так называемые «предварительно напряженные» полимеры. Именно они позволяют сделать мягких роботов подвижными и достаточно мощными. По мнению американских ученых, разрабатывающих мягких роботов, эти устройства более перспективны, чем жесткие и в скором будущем имеют шансы превзойти своих, менее гибких коллег.
Именно они позволяют сделать мягких роботов подвижными и достаточно мощными. По мнению американских ученых, разрабатывающих мягких роботов, эти устройства более перспективны, чем жесткие и в скором будущем имеют шансы превзойти своих, менее гибких коллег.
В Северной Каролине над созданием мягких роботов работают уже не один год. Прежде конструкторам удавалось делать роботов-гепардов, которые при всей своей мягкости и гибкости (которую обеспечивают специальные полимеры) не могли обходиться без жесткого каркаса-«позвоночника».
Робот-медуза получился значительно более медлительным, что стало платой за полное отсутствие жестких элементов конструкции.
Принцип движения робота-медузы основан на сочетании двух слоев одного и того же эластичного полимера. Один слой материала предварительно растягивают, создавая так называемый напряженный слой, второй полимер не подвергается изначальному напряжению и включает в себя воздушный канал. Нагнетая в канал воздух, робота можно заставить изгибаться. При этом за счет толщины предварительно напряженного слоя есть возможность контролировать направление и форму изгиба.
При этом за счет толщины предварительно напряженного слоя есть возможность контролировать направление и форму изгиба.
Первый созданный мягкий робот по своим движениям напоминал личинку насекомого, свертывающее свое тело, затем прыгающего вперед, быстро высвобождая накопленную энергию.
Робот-медуза немного сложнее. Он обладает предварительно напряженным дискообразным слоем, растянутым в четырех направлениях. Его канальный слой в виде кольца позволяет сформировать купол, который и выглядит как медуза.
Когда робот-медуза «расслабляется», купол изгибается вверх, как неглубокая чаша. Когда воздух закачивается в канальный слой, купол быстро изгибается вниз, выталкивая воду и продвигаясь вперед. В ходе экспериментальных испытаний робот-медуза продемонстрировал среднюю скорость передвижения в 53,3 мм в секунду. Создатели полагают, что это великолепный результат, учитывая, что ни один из трех исследованных ими видов настоящих медуз-прототипов не может перемещаться быстрее 30 мм в секунду.
Следующим этапом стало создание мягкого робота с захватами. За счет напряженного слоя они способны удерживать груз в состоянии покоя (то есть не затрачивая на это лишней энергии). Захваты раскрываются при подаче воздуха, то есть только для того, чтобы выпустить груз. Таким образом, совершенствуя функциональность мягких роботов и их скоростные качества, исследователи пытаются расширить круг применения такого рода устройств.
Пока нет данных о создании серийных прототипов мягких роботов, но, если верить американским исследователям-энтузиастам, оно уже не за горами.
Журнал IT News [№ 08/2020] Подписка на журналы
Робототехника
Предыдущая
Искусственный интеллект научат правилам хорошего тона
Следующая
Иди, смотри и пей кофе: Сбербанк РФ и Visа внедряют оплату «взглядом»
Хотите узнавать о новых материалах первыми?
Подписывайтесь на рассылку
Новостная лента
Главное за неделю
Нажимая на кнопку, я принимаю условия соглашения.
Cognitive Pilot разрабатывает робота для анализа почвы
Ожидается, что экономия удобрений агрохозяйствами от использования Cognitive Soil Analyzer составит от 20% до 25%.
Cognitive TechnologiesТехнологии, 15.12.22
Робот Amazon будет работать без зарплаты 24 часа в сутки и не вступит в профсоюз
Сотрудники складов Amazon беспокоятся, что их в перспективе всех уволят. А также опасаются за свою безопасность, у роботорук есть присоски.
Ольга БлинковаAmazonТехнологии, 12.11.22
Илон Маск покажет сегодня робота-гуманоида на мероприятии Tesla AI Day
Глава компании Tesla Илон Маск заявил, что бизнес по производству человекоподобных роботов в Tesla станет в перспективе более масштабным, чем производ…
Ольга БлинковаTeslaНовинки, 30.09.22
Робототехника станет ключевой темой, поскольку Softbank пытается вернуть себе инвестиционную привлекательность
После новостей о том, что Softbank, крупнейший в мире технологический инвестор, потерял более $27 млрд в последнем финансовом году, Дэвид Бикнелл, гла.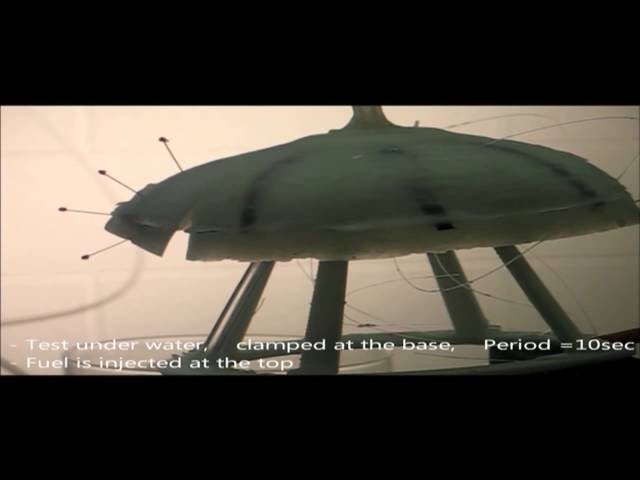 ..
..
Геннадий БелашБизнес, 15.05.22
Загрузить ещё1
2
3
4
5
»»
Следующая →
Робот-медуза для защиты исчезающих коралловых рифов
Зверинец биоинспирированных роботов для наблюдения за океаном. Авторы и права: Bujard et al., Sci. Робот . 6, eabd2971 (2021)
В среду британские ученые представили робота, вдохновленного формой и тонкими подводными движениями медузы, который позволяет ему безопасно исследовать находящиеся под угрозой исчезновения коралловые рифы.
Согласно исследованию, проведенному группами университетов Саутгемптона и Эдинбурга и опубликованному в журнале Science Robotics , маленький робот имитирует «самого эффективного пловца в природе — медузу Aurelia aurita», которую чаще называют обыкновенной медузой.
Эксперты решили использовать аспекты таких организмов, как кальмары, медузы и осьминоги, для нового инструмента подводных исследований, сказал Франческо Джорджио-Серки из Эдинбургского университета.
«Они совершенно уникальны тем, что отсутствие у них поддерживающей скелетной структуры не мешает им выдающимся подвигам в плавании», — сказал он.
Робот, состоящий из резиновой головы и восьми щупалец, был создан с помощью 3D-принтера и использует небольшие, но мощные водяные струи для движения на основе системы резонанса.
Этот робот является «первым подводным аппаратом, демонстрирующим преимущества использования резонанса», — заявили исследователи.
Его система самодвижения основана на поршне, который ударяет по месту соединения головы и щупалец.
Когда поршень ударяет с идеальной частотой, которая вызывает естественный резонанс компонентов, робот способен генерировать большие струи воды с очень небольшими затратами энергии.
Доктор Габриэль Веймут из Университета Саутгемптона и Института Алана Тьюринга объясняет конструкцию нового подводного робота, который движется со стилем и эффективностью самых эффективных пловцов. Предоставлено: Университет Саутгемптона.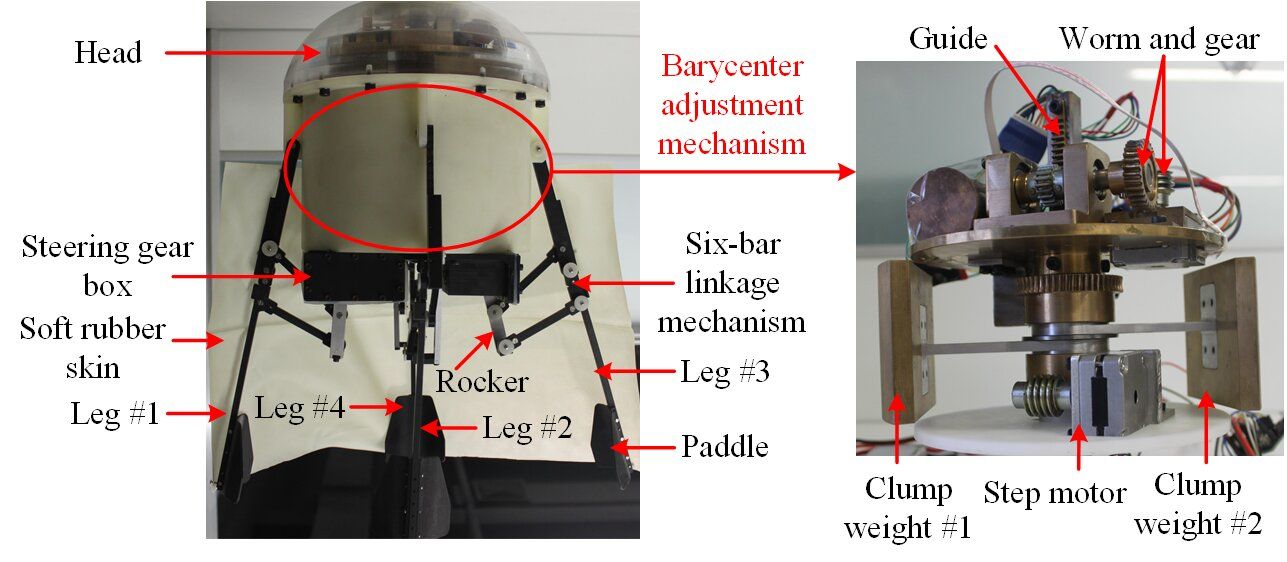 Необработанные кадры плавания робота. Предоставлено: Университет Саутгемптона,
Необработанные кадры плавания робота. Предоставлено: Университет Саутгемптона,
. Благодаря этой технологии робот-медуза может передвигаться «в 10-50 раз эффективнее, чем типичные небольшие подводные аппараты с пропеллерами».
«Эта повышенная эффективность в сочетании с дополнительными преимуществами мягкого, гибкого внешнего вида робота делает его идеальным для работы вблизи чувствительных сред, таких как коралловые рифы, археологические памятники или даже в водах, переполненных пловцами», — говорится в заявлении.
Благодаря этим качествам робот может заменить дайверов в задачах, слишком деликатных для подводных аппаратов, таких как нанесение восстанавливающих веществ на поврежденные кораллы.
Хотя новая технология была испытана в резервуарах, ее еще предстоит использовать в реальных условиях в океане.
Университет Саутгемптона хочет использовать эту концепцию для сборки «полностью маневренного и автономного подводного аппарата, способного воспринимать окружающую среду и ориентироваться в ней».
Дополнительная информация:
Т. Буджар и др., «Робот, вдохновленный резонансным кальмаром, раскрывает биологическую двигательную эффективность», Science Robotics (2021). robotics.sciencemag.org/lookup … /scirobotics.abd2971
«Роботы, вдохновленные кальмарами, работают плавно», Научная робототехника (2021). robotics.sciencemag.org/lookup … /scirobotics.abf4301
© 2021 АФП
Цитата :
Робот-медуза для защиты находящихся под угрозой исчезновения коралловых рифов (21 января 2021 г.)
получено 4 января 2023 г.
с https://phys.org/news/2021-01-robot-jellyfish-endangered-coral-reefs.html
Этот документ защищен авторским правом. Помимо любой добросовестной сделки с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в ознакомительных целях.
Медузы-роботы могут помочь обслуживать морские ветряные электростанции
Некоторые из последних участков первозданной и нетронутой дикой природы на Земле существуют под морями. Тем не менее, эти морские экосистемы находятся под угрозой из-за проектов глубоководной добычи полезных ископаемых, нефтяных вышек и морских ветряных электростанций. Когда эти объекты строятся и обслуживаются, они, как правило, наносят ущерб богатым экологическим сетям вокруг них.
Тем не менее, эти морские экосистемы находятся под угрозой из-за проектов глубоководной добычи полезных ископаемых, нефтяных вышек и морских ветряных электростанций. Когда эти объекты строятся и обслуживаются, они, как правило, наносят ущерб богатым экологическим сетям вокруг них.
Робототехники и инженеры работают над решением этой проблемы, ища новые способы создания машин, которые могли бы помочь ремонтировать, обслуживать или проверять подводные компоненты растущей оффшорной индустрии. Под руководством коллег Тьерри Бюжара и Габриэля Веймута из Университета Саутгемптона моя команда нашла решение этой проблемы, разработав подводных роботов, вдохновленных самыми умными пловцами в природе: сверхэффективными лунными медузами.
Традиционные водные роботы предназначены для двух основных целей: для эффективной навигации на большие расстояния по открытым участкам воды и для задач, требующих высокой маневренности вблизи подводных конструкций. Оба типа роботов эффективны, но немногие роботы сочетают эффективное перемещение с высокой маневренностью. Это означает, что большинство водных роботов слишком неуклюжи и неуклюжи, чтобы поддерживать оффшорную промышленность, не нанося при этом вреда подводной среде.
Это означает, что большинство водных роботов слишком неуклюжи и неуклюжи, чтобы поддерживать оффшорную промышленность, не нанося при этом вреда подводной среде.
Действительно, с распространением морских разработок на все более хрупкие среды даже самые современные морские роботы с трудом справляются со сложностью своих миссий. В настоящее время проводится множество исследований по разработке автономных глубоководных роботов, и такие инициативы, как Xprize, предлагают финансирование некоторых из самых интересных идей.
Морские машины
Чтобы ответить на эти вызовы, инженеры обратились к биологии, чтобы вдохновиться новыми формами роботизированного подводного движения. Логика гласит, что после миллионов лет эволюции водные существа должны предложить модели, которые помогут устранить недостатки нынешнего поколения подводных роботов.
Способ плавания рыб, основанный на взмахах их различных плавников, стал основным источником вдохновения для тех, кто экспериментирует с новыми подводными транспортными средствами. Но импульсный режим плавания, любимый медузами, считается самым эффективным в мире подводным двигательным устройством, предлагающим более убедительное технологическое решение, которое робототехникам гораздо легче имитировать.
Но импульсный режим плавания, любимый медузами, считается самым эффективным в мире подводным двигательным устройством, предлагающим более убедительное технологическое решение, которое робототехникам гораздо легче имитировать.
Импульсная струйная обработка основана на циклическом расширении и сжатии полой полости тела образца. Эта система управляет проглатыванием и выбросом воды, что в конечном итоге обеспечивает медузам некую форму движения.
Несмотря на свою простоту, эта стратегия плавания может привести к невероятной ловкости, а также к высокой энергоэффективности. Самый быстрый кальмар может двигаться со скоростью до 8 метров в секунду с помощью импульсно-струйной системы, а медуза Aurelia aurita (также известная как лунная медуза), как известно, является самым эффективным пловцом на планете.
Копируя эти организмы при создании подводных роботов, мы можем создавать новые подводные аппараты, способные сочетать высокую маневренность с непревзойденной эффективностью. В ходе нашего недавнего исследования мы разработали нового робота на основе биотехнологий, который может сравниться по тяговой эффективности с Aurelia aurita . Для этого мы воспроизвели ключевой принцип, который позволяет медузам достигать высокой эффективности движения: резонанс.
В ходе нашего недавнего исследования мы разработали нового робота на основе биотехнологий, который может сравниться по тяговой эффективности с Aurelia aurita . Для этого мы воспроизвели ключевой принцип, который позволяет медузам достигать высокой эффективности движения: резонанс.
Аурелия аурита или лунная медуза считается самым эффективным пловцом на Земле.
Ричард А. Макмиллин/Shutterstock
Резонансная робототехника
Резонанс — это физическое явление, обычно встречающееся во многих повседневных действиях, таких как ходьба, игра на качелях и даже пение. Если мы наблюдаем, например, за качающимся маятником, то по опыту знаем, что он будет продолжать колебаться, пока не остановится, зависнув в вертикальном положении, определяемом гравитацией. Частота колебаний маятника называется его «собственной частотой».
Из опыта мы также знаем, что если мы хотим, чтобы маятник продолжал колебаться, самый простой способ сделать это — подталкивать его каждый раз, когда он достигает высшей точки своего колебания, точно так же, как мы делаем это, когда толкаем маятник. ребенок выше на качелях. Когда мы делаем это, мы позволяем маятнику или качанию «резонировать».
ребенок выше на качелях. Когда мы делаем это, мы позволяем маятнику или качанию «резонировать».
Итак, резонанс возникает, когда внешняя сила воздействует на систему с ее собственной частотой, заставляя систему достигать колебаний большей амплитуды при незначительной силе, необходимой. Вот что делает работу в резонансе такой эффективной. Мы применили тот же принцип к двигателю нашего робота, вдохновленного медузой.
Мы предположили, что, сконструировав робота-медузу с упругой двигательной системой, мы сможем использовать внутреннюю частоту этой упругой ткани, чтобы привести механизм в резонанс. В резонансе наш робот будет выпускать мощные импульсные струи за долю энергии.
Разработанный нами робот имеет эластичную внутреннюю камеру, которая расширяется и сжимается под действием зонтиковидного механизма. При тестировании в резервуаре с водой было обнаружено, что скорость плавания робота увеличивается по мере того, как скорость, с которой он пульсирует, приближается к естественной частоте упругой камеры робота-медузы.