Содержание
Архивы робот-пылесос — Чудо техники
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робот, робот-массажист, робот-парковщик, робот-пылесос, робот-уборщик, робот-утка
Робот определит можно ли срывать гриб и сделает это мягко
Читать далее
Архив программы Сюжеты
Владимир Рогов
робот-пылесос, роботехника, сюжет, сюжеты, чудо, Чудо техники
Роботы-пылесосы: проверка качества уборки
Читать далее
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робот, робот-массажист, робот-пылесос, робот-уборщик, робот-утка, роботехника, роботы
Робота научили делать инъекции без иглы
Читать далее
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робот, робот-массажист, робот-парковщик, робот-пылесос, робот-уборщик, робот-утка, роботакси, роботехника, роботы
Робот — неваляшка
Читать далее
Дроны и роботы Новости
Владимир Рогов
промышленный робот, робот, робот-пылесос, робот-уборщик, робот-утка, роботы
Робот будет собирать яблоки
Читать далее
Бытовая техника Новости
Редактор
бытовая техника, очиститель воздуха, паровой шкаф, пароочиститель, пылесос, робот-пылесос, уборка
Мы против генеральной уборки до потери пульса!
Читать далее
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робот, робот-массажист, робот-пылесос, роботехника
Крошечные роботы-дрели будут доставлять лекарства прямо к злокачественным опухолям
Читать далее
Бытовая техника Обзоры
Редактор
Tefal, Tefal X-plorer Serie 80, бытовая техника, обзор, робот-пылесос, тест, техника для уборки
Tefal всегда думает о нас?
Читать далее
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робот, робот-массажист, робот-парковщик, робот-пылесос, робот-уборщик, робот-утка, роботакси, роботехника, роботы
Команда исследователей из Сингапура встроила растение в роботизированную руку
Читать далее
Дроны и роботы Новости
Владимир Рогов
микроробот, промышленный робот, робомобиль, робопес, роборука, роборуки, робот, робот-массажист, робот-парковщик, робот-пылесос, робот-уборщик, робот-утка, роботакси, роботехника, роботы
Тысячи роботов «София» помогут справляться с одиночеством
Читать далее
Дроны и роботы Новости
Владимир Рогов
Samsung, робот, робот-массажист, робот-парковщик, робот-пылесос, робот-уборщик, робот-утка, роботакси, роботехника, роботы
Samsung представила трёх новых роботов, которые помогут по дому и бокал вина поднесут
Читать далее
- ← Назад
Двуногие ходящие роботы
В этом разделе говорим о роботах, не просто на двух конечностях, но схожих по принципу ходьбы с человеком. Антропоморфность робота в целом не столь важна.
Российские
AnyWalker, Кубанский ГУ и МТИ
Может передвигаться по пересеченной местности на двух опорах, открывать двери, карабкаться по лестницам. Стабилизация за счет создания внутренних моментов силы. С участием специалистов компании Технодинамика. Автор проекта — Игорь Рядчиков. Пока что позиционируется, как образовательная платформа. В дальнейшем может быть использована в разработках персональных роботов. Передвижение выглядит очень медленным.
Передвижение выглядит очень медленным.
2017.04.21 Показан на Skolkovo Robotics 2017
AR-700, Андроидная техника (НПО «Андроидная техника»), Москва
В июле 2017 года представлен на выставке Иннопром-2017. Фото.
AR-601, Андроидная техника (НПО «Андроидная техника»), Москва
AR-601 (или AR-600E), 2017.01
FEDOR, Андроидная техника (НПО «Андроидная техника»), Москва
Final Experimental Demonstration Object Research — Финальный экспериментальный демонстрационный объект исследований. Разработка антропомофного робота в рамках проекта «Спасатель». Иногда также называется Аватар, поскольку имеет режим телеуправления с помощью «костюма», захватывающего движения оператора и формирующего соответствующий поток управляющих команд для робота. Кроме того, робот имеет элементы автономности — может самостоятельно совершить толчок, прыжок, подниматься после падения. Автономность ограничена рядом других «сценариев». Процедура самообучения демо-модели не предусмотрена.
Другие страны
Alpha 2, UBTECH, Китай
На 2015.11 в разработке, открыт прием заказов в рамках краудфандинговой программы по сбору средств.
ASIMO, Honda, Япония
Робот андроидного типа, способный ходить и бегать. На 2016.03 замечательный прототип так и не превратился в коммерчески доступное изделие.
2014.11.09 Видео
Atlas, Boston Dynamics, США
Лучший ходящий робот на 2016.02 в мире
2016.09.12 Atlas научили балансировать на одной ноге.
2016.02.24 Новое поколение робота Atlas разработки Google
Cassie, Agility Robotics, США
Робот Cassie. Источник фото: Oregon State Univercity
Digit, Agility Robotics, США
фото Agility Robotics
2019.03.20 Двуногая платформа Cassie компании Agility Robotics получила верхнюю часть туловища и руки. И теперь похожа на другого двуногого антропоморфного робота — Atlas от Boston Dynamics. Digit (Цифра) — первый двуногий робот компании Agility Robotics. Он построен на отработанном ранее двуногом шасси Cassie. Теперь у робота появилась верхняя часть туловища с двумя манипуляторами-руками, имеющими четыре степени свободы. Робот может использовать их для балансирования при ходьбе, для открывания дверей (толкания), а также для того, чтобы поднимать коробки весом до 18 кг. Робот даже способен поймать летящую коробку. Дизайн робота выглядит более современным, нежели, чем у громоздкого Atlas.
И теперь похожа на другого двуногого антропоморфного робота — Atlas от Boston Dynamics. Digit (Цифра) — первый двуногий робот компании Agility Robotics. Он построен на отработанном ранее двуногом шасси Cassie. Теперь у робота появилась верхняя часть туловища с двумя манипуляторами-руками, имеющими четыре степени свободы. Робот может использовать их для балансирования при ходьбе, для открывания дверей (толкания), а также для того, чтобы поднимать коробки весом до 18 кг. Робот даже способен поймать летящую коробку. Дизайн робота выглядит более современным, нежели, чем у громоздкого Atlas.
DURUS, Технологический институт Джорджии, США
2016.07.13 Почему робот DURUS одет в сникерсы?
HRP-5, AIST, Япония
Двуногий шагающий робот HRP-5 представлен в октябре 2018 года. Рост — 182 см, вес — 101 кг. Обладает высокой степенью свободы различных элементов тела, позиционируется, как платформа для сотрудничества исследовательских организаций и промышленности.
Kengoro, Tokio University, Япония
Двуногий робот, способный ходить и даже отжиматься от пола. Более 100 электродвигателей и других актуаторов. Основная особенность — робот может «потеть», что позволяет ему бороться с перегревом, связанным с высокой плотностью электромоторов и актуаторов. Для этого роботу требуется пополнять запас воды.
NAO, Aldebaran Robotics, Франция (Япония)
NAO h35 Next Gen. Домашний антропоморфный робот высотой 58 см. Компаньон, помощник или исследовательская платформа (STEM). С 2012 года.
R5, NASA/DARPA, США
Фото: NASA, источник: nasa.gov. R5 демонстрирует улучшенный баланс
Робот для использования в космосе, на Луне, на Марсе. С двумя ногами и возможностью хождения. На 2015.11 в разработке.
SAFFiR, US NAVI, США
Экспериментальный двуногий робот-пожарный андроидного типа SAFFIR (Shipboard Automated Firefighting Robot). В июле 2016 года появилось видео.
Шагоход Google, Alphabet / Schaft, США
2016.04.13 Alphabet’s Other Robotics Company. Больше подробностей о безымянном ходячем роботе японской дочки Alphabet. И о самой компании Schaft.
2016.04.09 Шагоход Google — странный ходячий робот. Двуногий прототип робота, способного передвигаться вне помещений не только по дорогам.
2016.04.07 Видео
Российский робот Федор первым в мире научился садиться на шпагат
https://ria.ru/20170719/1498737549.html
Российский робот Федор первым в мире научился садиться на шпагат
Российский робот Федор первым в мире научился садиться на шпагат — РИА Новости, 03.03.2020
Российский робот Федор первым в мире научился садиться на шпагат
Российский человекоподобный робот Федор стал первым в мире роботом, способным сесть на шпагат, сообщили РИА Новости в Фонде перспективных исследований (ФПИ). .. РИА Новости, 19.07.2017
.. РИА Новости, 19.07.2017
2017-07-19T10:08
2017-07-19T10:08
2020-03-03T05:25
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdnn21.img.ria.ru/images/148311/95/1483119582_0:0:3009:1694_1920x0_80_0_0_f90ed3cbfc2b1e4fe0185cd470b1dd68.jpg
россия
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
2017
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og. xn--p1ai/awards/
xn--p1ai/awards/
1920
1080
true
1920
1440
true
https://cdnn21.img.ria.ru/images/148311/95/1483119582_26:0:2755:2047_1920x0_80_0_0_20d12ccfb2fe87e08c769d171d265964.jpg
1920
1920
true
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
1
5
4.7
96
internet-group@rian.ru
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
технологии, фонд перспективных исследований, россия
Технологии, Фонд перспективных исследований, Россия
МОСКВА, 19 июл — РИА Новости. Российский человекоподобный робот Федор стал первым в мире роботом, способным сесть на шпагат, сообщили РИА Новости в Фонде перспективных исследований (ФПИ).
13 апреля 2017, 22:48
Человекоподобный робот Федор научился стрелять с двух рук
Федор (FEDOR — Final Experimental Demonstration Object Research) — первый отечественный человекообразный робот, созданный в рамках проекта ФПИ. Он должен заменить человека в местах повышенного риска — например, в спасательных операциях и в космосе. Планируется, что Федор в 2021 году отправится на орбиту на новом российском космическом корабле «Федерация».
«Робот Федор обладает лучшей в мире кинематикой среди роботов-андроидов: он является единственным в мире антропоморфным роботом, способным сесть и на продольный, и на поперечный шпагаты. Механика других существующих в мире андроидов не обеспечивает такой свободы действия», — отметили в фонде.
Как пояснили в ФПИ, гибкость конструкции робота-спасателя необходима для того, чтобы дать ему возможность преодолевать разнообразные препятствия, например, завалы.
«Кроме того, Федор — единственный в мире андроид, способный смотреть как вертикально вверх, так и строго вниз, опустив голову за счет ее подвижности.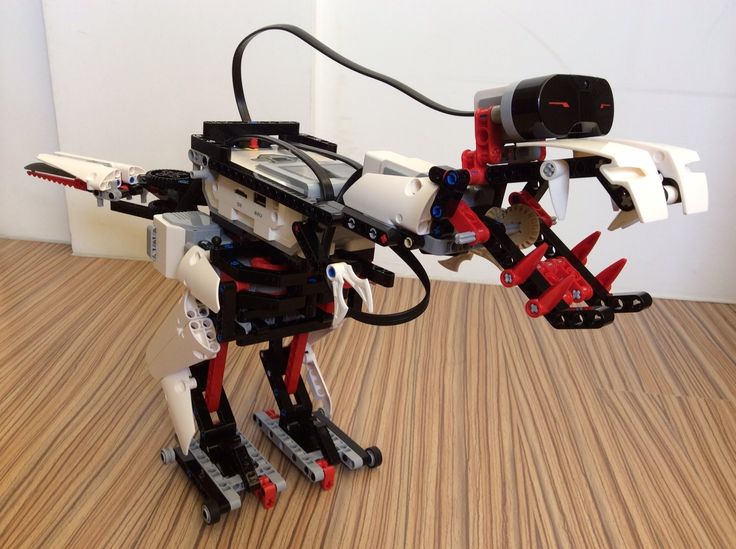 Это не причуда разработчиков: высокая подвижность головного модуля позволяет ему смотреть вперед даже тогда, когда робот передвигается «по-пластунски», — рассказали в ФПИ.
Это не причуда разработчиков: высокая подвижность головного модуля позволяет ему смотреть вперед даже тогда, когда робот передвигается «по-пластунски», — рассказали в ФПИ.
Взаимодействие с оператором
12 апреля 2017, 11:29
Робота Федора начали готовить к полету в космос в 2021 году
Еще одно уникальное качество робота Федора — система обратной силомоментной или сенсорной связи. Она позволяет создать эффект погружения оператора в те физические обстоятельства, в которых находится робот. Когда речь идет о таком сложном устройстве, как антропоморфный робот с несколькими режимами управления, сенсорная система должна регулировать сложные механические движения, связанные, например, с равновесием и динамикой.
«Управляющий костюм обеспечивает связь оператора с роботом: в прямом направлении человек управляет приводами робота, в обратном — получает информацию о внешних нагрузках на робота. При этом приводы управляющего костюма вступают во взаимодействие с мышцами человека, так что оператор может чувствовать и управлять той силой, которую робот прилагает к выполняемым действиям», — отметили в ФПИ.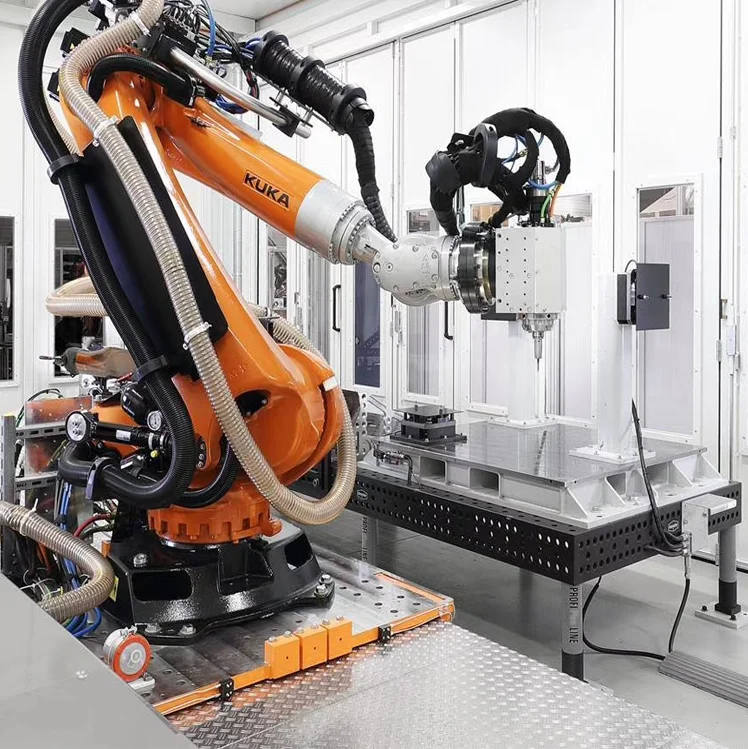
Так, от сенсоров робота, которые измеряют скорость, угловое и линейное положение и многие другие данные, информация поступает на управляющий компьютер. Если робот упирается рукой в стену и не может продвинуться далее, то человек через приводы управляющего костюма получает сопротивление, эквивалентное усилию своей руки.
«Если добавить сюда данные, получаемые от «органов зрения» и «органов слуха» робота, то эффект присутствия оператора в месте действия робота будет практически полным. Зарубежных технологий такого уровня проработки на сегодняшний день не существует», — подчеркнули в ФПИ.
19 ноября 2016, 12:29
Робот Федор показал, как действует пилой, огнетушителем и паяльникомФонд перспективных исследований опубликовал кадры испытаний робота Федора. Смотрите на видео, какие действия может выполнять андроид, предназначенный для полета в космос.
Видимая часть айсберга
9 октября 2016, 01:07
Рогозин представил робота Федора для полетов в космосРобот-андроид, разрабатываемый Фондом перспективных исследований совместно с РКК «Энергия», к 2021 году будет адаптирован к новому пилотируемому кораблю, после чего начнутся летные испытания.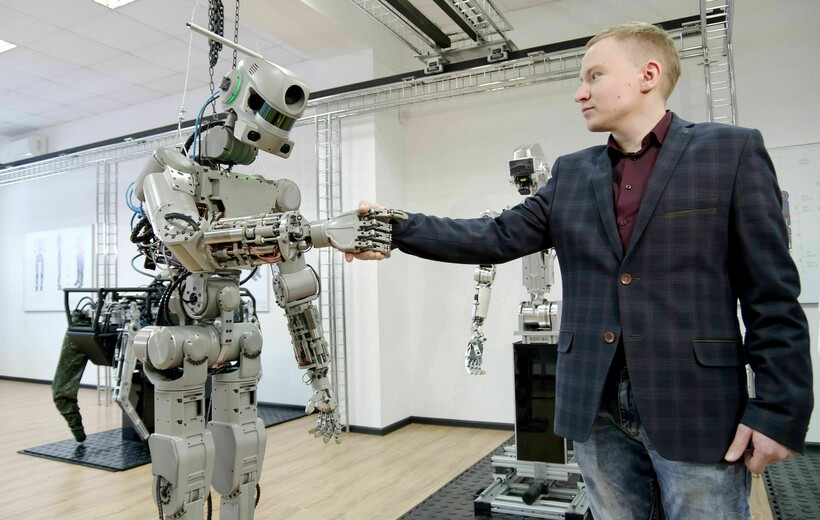
Робот Федор умеет самостоятельно перемещаться в городе и по пересеченной местности, работать с инструментами и управлять транспортными средствами. Управление им может производиться как в автономном режиме, так и в комбинированном, когда часть функций выполняется роботом автоматически, а часть задается оператором.
«Сам робот Федор — это только видимая часть айсберга. Сложность разработки антропоморфных роботов сегодня обусловлена высокими требованиями к техническим решениям как в области механики, так и в области алгоритмов управления», — рассказал руководитель проекта ФПИ Сергей Хурс.
Так, помимо робототехнической платформы в состав комплекса входит комбинированная система дистанционного управления с так называемым «управляющим костюмом». В основе этой системы лежит математическая модель комбинированного управления, ее особенностью является согласование физических и математических моделей тела человека, «управляющего костюма» и конструкции робота.
«Если отдельные разработки подобного рода и существовали до этого, замкнутой математической модели для антропоморфного робота ранее не было», — подчеркивают в фонде.
В рамках математической модели первое согласование обеспечивает пересчет показаний сенсоров «управляющего костюма» на модель тела человека, так как его суставы и шарниры механизмов робота не совпадают. Второе согласование устраняет различие конструкций «управляющего костюма» и робота.
«Развитая сенсорная система робота включает силомоментные датчики, информацию от которых необходимо передать на тело оператора в виде внешних нагрузок, давая ему представление о силовом взаимодействии робота с окружающими предметами. В итоге появляется модель с прямыми и обратными сенсорными связями, которая позволяет оператору управлять роботом на основе собственных ощущений», — рассказали в ФПИ.
Экзамен для Федора: испытания человекоподобного робота
© РИА Новости / Александр Овчаров / Перейти в медиабанкФёдор или FEDOR (Final Experimental Demonstration Object Research) — антропоморфный робот-спасатель разработан НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.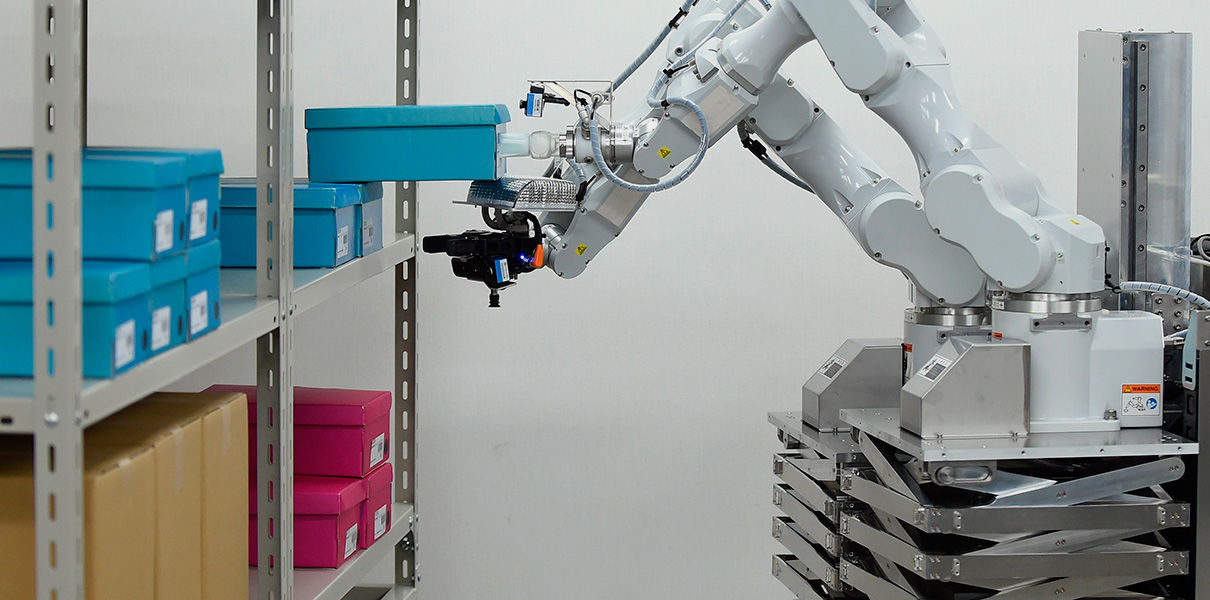
1 из 12
Фёдор или FEDOR (Final Experimental Demonstration Object Research) — антропоморфный робот-спасатель разработан НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.
© РИА Новости / Александр Овчаров / Перейти в медиабанкВ 2021 году Федора планируется отправить в космос с космодрома Восточный с помощью ракеты-носителя Ангара на корабле Федерация.
2 из 12
В 2021 году Федора планируется отправить в космос с космодрома Восточный с помощью ракеты-носителя Ангара на корабле Федерация.
© РИА Новости / Александр Овчаров / Перейти в медиабанкРаботы над роботом начались в 2014 году в рамках проекта «Спасатель», тогда его называли «Аватар».
3 из 12
Работы над роботом начались в 2014 году в рамках проекта «Спасатель», тогда его называли «Аватар».
4 из 12
Федор имеет систему голосового управления, оснащен специальными датчиками.
© РИА Новости / Александр Овчаров / Перейти в медиабанкВ октябре вице-премьер России Дмитрий Рогозин написал на своей странице в фейсбуке: «»Разорванная в клочья страна» создаёт робота — члена экипажа орбитального корабля».
5 из 12
В октябре вице-премьер России Дмитрий Рогозин написал на своей странице в фейсбуке: «»Разорванная в клочья страна» создаёт робота — члена экипажа орбитального корабля».
© РИА Новости / Александр Овчаров / Перейти в медиабанкПо словам Дмитрия Рогозина, «машина имеет техническое зрение и самостоятельно выбирает оптимальное решение поставленной оператором задачи. В процессе её выполнения оператор машиной не управляет».
6 из 12
По словам Дмитрия Рогозина, «машина имеет техническое зрение и самостоятельно выбирает оптимальное решение поставленной оператором задачи. В процессе её выполнения оператор машиной не управляет».
7 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
© РИА Новости / Александр Овчаров / Перейти в медиабанк»При необходимости робот становится аватаром и на расстоянии нескольких тысяч километров может точно копировать действия оператора. Действия или даже мысленные команды», — сообщил Рогозин.
8 из 12
«При необходимости робот становится аватаром и на расстоянии нескольких тысяч километров может точно копировать действия оператора. Действия или даже мысленные команды», — сообщил Рогозин.
Действия или даже мысленные команды», — сообщил Рогозин.
9 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
10 из 12
Оператор антропоморфного робота «Федор» проекта «Спасатель».
11 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
12 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
1 из 12
Фёдор или FEDOR (Final Experimental Demonstration Object Research) — антропоморфный робот-спасатель разработан НПО «Андроидная техника» и Фондом перспективных исследований по заказу МЧС России.
2 из 12
В 2021 году Федора планируется отправить в космос с космодрома Восточный с помощью ракеты-носителя Ангара на корабле Федерация.
3 из 12
Работы над роботом начались в 2014 году в рамках проекта «Спасатель», тогда его называли «Аватар».
4 из 12
Федор имеет систему голосового управления, оснащен специальными датчиками.
5 из 12
В октябре вице-премьер России Дмитрий Рогозин написал на своей странице в фейсбуке: «»Разорванная в клочья страна» создаёт робота — члена экипажа орбитального корабля».
6 из 12
По словам Дмитрия Рогозина, «машина имеет техническое зрение и самостоятельно выбирает оптимальное решение поставленной оператором задачи. В процессе её выполнения оператор машиной не управляет».
7 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
8 из 12
«При необходимости робот становится аватаром и на расстоянии нескольких тысяч километров может точно копировать действия оператора. Действия или даже мысленные команды», — сообщил Рогозин.
9 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
10 из 12
Оператор антропоморфного робота «Федор» проекта «Спасатель».
11 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
12 из 12
Испытание антропоморфного робота «Федор» проекта «Спасатель».
Робот-автолюбитель
Робота Федора отличает высокий уровень проработки автономных программ, связанных с управлением транспортным средством. Сегодня робот способен самостоятельно сесть в автомобиль, снять транспортное средство со стояночного тормоза и управлять им через ручную коробку передач, рулевое колесо, педали газа, сцепления и тормоза, а также поворачивать рулевое колесо с перехватом. Все эти действия андроид выполняет автономно, без участия оператора.
Все эти действия андроид выполняет автономно, без участия оператора.
При этом видеоканалы стереоскопической системы технического зрения Фёдора могут работать как совместно, так и раздельно. Совместная работа каналов позволяет определять расстояние до объектов, а раздельная — решать не менее двух функциональных задач одновременно. К примеру, это позволяет роботу выполнять действия двумя разными инструментами одновременно: робот получает данные от правого и левого видеоканалов, анализирует информацию о нескольких объектах и об их движении, сопоставляет дальность и производит другие вычислительные операции.
«Механика робота позволяет воспроизвести практически любые движения человеческого тела, а программное обеспечение, включая пополняемые библиотеки, позволяет расширять профессиональные навыки робота. При этом самой трудоемкой задачей является обучение только первого робота: остальные экземпляры будут получать «знания» методом копирования», — заключили в ФПИ.
© РИА Новости / Александр Овчаров / Перейти в медиабанкИспытание антропоморфного робота «Федор» проекта «Спасатель» в лаборатории на базе НПО «Андроидная техника» в Магнитогорске
7 Последние инновации в робототехнике
Машины уже давно вышли из исследовательских лабораторий, чтобы проникнуть в новые сферы. Ожидается, что они продолжат эпическую миграцию в сторону аптек, автомобильного сектора и многого другого. Бесчисленное количество роботов уже способствует повышению качества продукции и сокращению сроков выполнения заказов в производственном секторе.
Ожидается, что они продолжат эпическую миграцию в сторону аптек, автомобильного сектора и многого другого. Бесчисленное количество роботов уже способствует повышению качества продукции и сокращению сроков выполнения заказов в производственном секторе.
Эти роботы доказали свою эффективность при выполнении основных задач и работ. Роботы подвержены меньшему количеству ошибок, требуют меньше времени простоя и более рентабельны. В результате они имеют более высокие показатели удержания. Но с каждой машиной должен быть кто-то, кто будет ее обслуживать и ремонтировать, если она сломается. Здесь на помощь приходят люди, прошедшие подготовку в области мехатроники.
Вот некоторые из последних инноваций в области робототехники, которые ремонтируются и обслуживаются опытными инженерами-технологами в области мехатроники.
1. Рабочие роботы Google
Google планирует производить рабочих роботов с индивидуальностью. Технологический гигант недавно получил патент на амбициозный проект.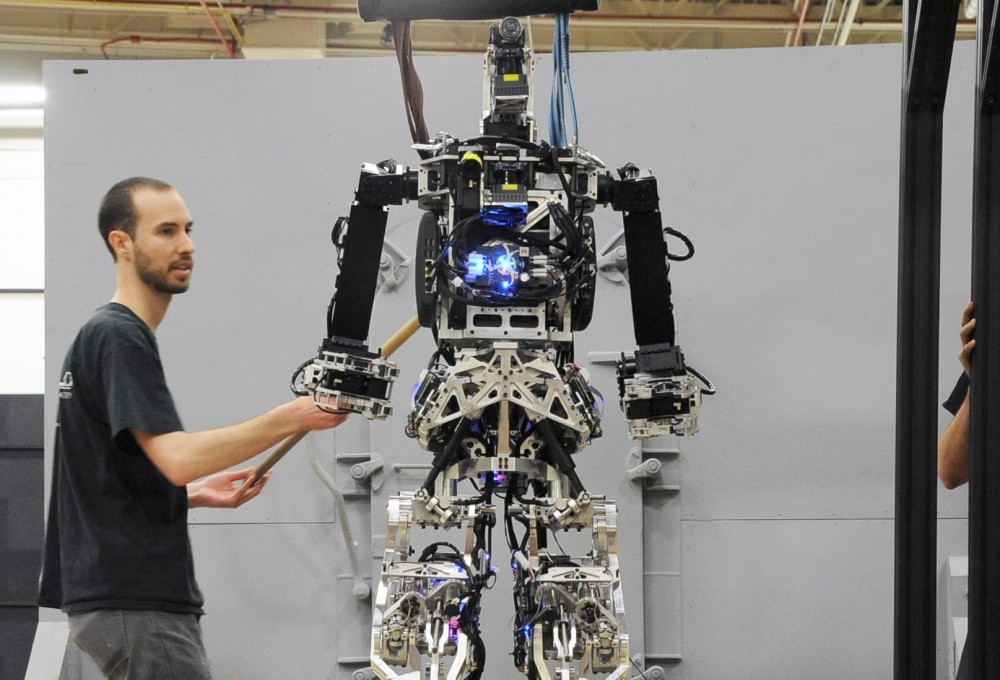 Инженеры позволят машинам загружать персоналии из облачной системы. Роботы способны хранить и отображать несколько личностей при взаимодействии с людьми.
Инженеры позволят машинам загружать персоналии из облачной системы. Роботы способны хранить и отображать несколько личностей при взаимодействии с людьми.
2. Многозадачные боты
Momentum Machines разработала многозадачного бота, способного приготовить изысканный гамбургер всего за 10 секунд. Если все пойдет хорошо, робота можно будет использовать в ресторанах быстрого питания.
3. Рука UR3
Созданное компанией Universal Robots автоматизированное устройство, известное как UR3, может на лету создавать собственные запасные части. Симпатичный и ловкий робот может выполнять множество задач, таких как склеивание, покраска, пайка и захват.
4. Робот Сол
Робот Сол создан для борьбы со смертельными заболеваниями, такими как вирус Эбола. Машина была развернута ВВС для ликвидации вируса Эбола в помещениях, где проводятся карантинные процедуры в отношении гуманитарных работников. Разработанный Xenex, Saul уничтожает следы лихорадки Эбола с помощью мощных импульсов высокоэнергетического ультрафиолетового излучения. Он разрушает и ослабляет клеточные стенки вируса.
Он разрушает и ослабляет клеточные стенки вируса.
5. Asus Zenbo
Asus Zenbo — недорогой робот, способный передвигаться автономно и понимающий словесные команды. Asus разработала устройство, чтобы помочь людям помнить ежедневные задачи, такие как расписание упражнений и приемов лекарств, а также визиты к врачу. Zenbo также может отслеживать окрестности, чтобы обнаруживать любые чрезвычайные ситуации. Он может подключаться к компонентам умного дома, таким как камеры видеонаблюдения, освещение и дверные замки.
6. Паро
Паро — терапевтический робот, похожий на детеныша гренландского тюленя. Пушистое устройство предназначено для снижения уровня стресса и стимулирования взаимодействия между лицами, осуществляющими уход, и пациентами. Он доказал свою эффективность, когда речь идет о мотивации и помощи пациентам в расслаблении. Психологические эффекты основаны на документально подтвержденных преимуществах анималотерапии. Он поставляется с пятью различными датчиками, включая датчики осанки, света, тактильные, слуховые и температурные датчики.
7. Перец
Пеппер — говорящий робот-гуманоид, который меняет свое отношение в зависимости от того, как он воспринимает настроение окружающих его людей. Устройство обнаруживает эмоциональные состояния, такие как печаль, удивление, радость и гнев. Он отвечает естественно и уместно. Pepper использует разнонаправленные микрофоны для обнаружения звуков.
Умная машина анализирует лексическое поле для оценки тона голоса. Это позволяет ему точно понимать эмоциональный контекст. Для зрения Pepper использует комбинацию 2HD и 3D-камер для распознавания формы объектов. Его разработчики встроили до 20 двигателей в голову, спину и руки для регулирования движений.
Образование и обучение в области мехатроники
Для большинства вакансий техников-робототехников требуется как минимум степень бакалавра в соответствующих областях. Чтобы быть конкурентоспособным в этой области, необходимо иметь образование и подготовку в следующих областях:
- Логика и дизайн программного обеспечения
- Программирование
- Передача данных и сеть
- Электрические цепи
- Физика
- Приборы и измерения
- Микроконтроллеры
- И многое другое
Вы ищете степень в растущей области робототехники?
Если вы увлечены наукой и хотели бы работать с роботами, для этого вам потребуется соответствующее образование. Университет ECPI предлагает среду практического обучения, чтобы помочь подготовиться к получению степени бакалавра наук в области технологий электронной техники со специализацией в области мехатроники. Поговорите со знающим и дружелюбным консультантом по приему сегодня, чтобы узнать, подходит ли вам университет ECPI.
Университет ECPI предлагает среду практического обучения, чтобы помочь подготовиться к получению степени бакалавра наук в области технологий электронной техники со специализацией в области мехатроники. Поговорите со знающим и дружелюбным консультантом по приему сегодня, чтобы узнать, подходит ли вам университет ECPI.
Это может быть Лучшее решение, которое вы когда-либо принимали !
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ. Университет ECPI не делает никаких заявлений или гарантий в отношении фактической возможности трудоустройства или потенциального дохода для нынешних, прошлых или будущих студентов или выпускников какой-либо образовательной программы, которую мы предлагаем. Веб-сайт университета ECPI публикуется только в информационных целях. Прилагаются все усилия для обеспечения точности информации, содержащейся в домене ECPI.edu; однако не дается никаких гарантий точности. Никакие договорные права, явные или подразумеваемые, не создаются его содержанием.
Для получения дополнительной информации об университете ECPI или любой из наших программ щелкните здесь: http://www.ecpi.edu/ или http://ow.ly/Ca1ya.
Тенденции развития робототехники
Резюме
Тенденции в области робототехники Джим Пинто, отраслевой аналитик
Когда дело доходит до роботов, реальность все еще отстает от научной фантастики. Но то, что роботы не оправдали возложенных на них надежд в последние десятилетия, не означает, что рано или поздно они не появятся. Действительно, слияние нескольких передовых технологий еще больше приближает эру робототехники — меньше, дешевле, практичнее и рентабельнее.
Мускулы, кости и мозг
У любого робота есть 3 аспекта:
- Сила — сила, связанная с физической полезной нагрузкой, которую робот может перемещать.
- Кость — физическая структура робота по отношению к выполняемой им работе; это определяет размер и вес робота по отношению к его физической полезной нагрузке.

- Мозг – роботизированный интеллект; что он может думать и делать независимо; сколько ручного взаимодействия требуется.
Из-за того, как роботы изображаются в научной фантастике, многие люди ожидают, что роботы будут внешне похожи на людей. Но на самом деле то, как выглядит робот, больше связано с задачами или функциями, которые он выполняет. Многие машины, которые совсем не похожи на людей, однозначно могут быть классифицированы как роботы. И точно так же некоторые человекоподобные роботы мало чем отличаются от механических механизмов или игрушек.
Многие ранние роботы были большими машинами со значительными мускулами и ничем другим. Старые роботы с гидравлическим приводом были отнесены к задачам из категории 3D — скучным, грязным и опасным. Технологические достижения с момента первого промышленного внедрения полностью изменили возможности, производительность и стратегические преимущества роботов. Например, к 19Роботы 80-х годов перешли от гидравлического привода к электрическому. Точность и производительность улучшены.
Точность и производительность улучшены.
Промышленные роботы уже работают
Сегодня количество роботов в мире приближается к 1 000 000, причем почти половина этого числа приходится на Японию и всего 15% — на США. Пару десятилетий назад 90% роботов использовались в автомобилестроении, как правило, на сборочных линиях, выполняющих множество повторяющихся задач. Сегодня только 50% приходится на автомобильные заводы, а другая половина разбросана по другим фабрикам, лабораториям, складам, электростанциям, больницам и многим другим отраслям.
Роботы используются для сборки изделий, обращения с опасными материалами, окраски распылением, резки и полировки, осмотра изделий. Количество роботов, используемых для решения таких разнообразных задач, как очистка канализации, обнаружение бомб и выполнение сложных хирургических операций, неуклонно растет и будет продолжать расти в ближайшие годы.
Интеллект роботов
Даже с примитивным интеллектом роботы продемонстрировали способность значительно повышать производительность, эффективность и качество производства. Кроме того, некоторые из «самых умных» роботов не производятся; их используют в качестве исследователей космоса, дистанционно управляемых хирургов и даже домашних животных, таких как механическая собака AIBO от Sony. В некотором смысле, некоторые из этих других приложений показывают, что может быть возможно на производственных площадках, если производители осознают, что промышленных роботов не нужно прикручивать к полу или ограничивать ограничениями вчерашних концепций машин.
Кроме того, некоторые из «самых умных» роботов не производятся; их используют в качестве исследователей космоса, дистанционно управляемых хирургов и даже домашних животных, таких как механическая собака AIBO от Sony. В некотором смысле, некоторые из этих других приложений показывают, что может быть возможно на производственных площадках, если производители осознают, что промышленных роботов не нужно прикручивать к полу или ограничивать ограничениями вчерашних концепций машин.
Благодаря быстро растущей мощности микропроцессоров и методов искусственного интеллекта роботы резко увеличили свой потенциал в качестве гибких средств автоматизации. Новый всплеск робототехники связан с приложениями, требующими расширенного интеллекта. Робототехника объединяется с широким спектром дополнительных технологий — машинным зрением, датчиком силы (осязанием), распознаванием речи и передовой механикой. Это приводит к захватывающим новым уровням функциональности для работ, которые раньше никогда не считались практичными для роботов.
Внедрение роботов со встроенным зрением и осязанием резко меняет скорость и эффективность новых систем производства и доставки. Роботы стали настолько точными, что их можно применять там, где ручные операции уже нецелесообразны. Производство полупроводников является одним из примеров, когда постоянный высокий уровень производительности и качества не может быть достигнут с помощью людей и простой механизации. Кроме того, значительные преимущества достигаются за счет быстрой смены и эволюции продукта, чего нельзя добиться с помощью обычного твердосплавного инструмента.
Повышение конкурентоспособности
Как уже упоминалось, роботизированные приложения возникли в автомобильной промышленности. General Motors, имеющая около 40-50 000 роботов, продолжает использовать и разрабатывать новые подходы. Возможность привнести в роботов больше интеллекта теперь открывает важные новые стратегические возможности. Цены на автомобили фактически снизились за последние два-три года, поэтому единственный способ, с помощью которого производители могут продолжать получать прибыль, — это сокращение структурных и производственных затрат.
Когда заводы переоборудуют для выпуска новых моделей автомобилей, обычно в строительство вкладывают сотни миллионов долларов. Роботизированные производственные технологии направлены на минимизацию капитальных вложений за счет повышения гибкости. Находятся новые применения роботов для операций, которые уже автоматизированы с помощью специального оборудования. Гибкость роботов позволяет выполнять те же автоматизированные операции более последовательно, с недорогим оборудованием и со значительными экономическими преимуществами.
Роботизированная помощь
Ключевой областью развития робототехники являются интеллектуальные вспомогательные устройства (IAD) — операторы манипулируют роботом, как если бы он был бионическим продолжением их собственных конечностей с увеличенной досягаемостью и силой. Это технология робототехники — не замена людям или роботам, а скорее новый класс эргономичных вспомогательных продуктов, которые помогают людям-партнерам самыми разными способами, включая усиление, управление движением, отслеживание линий и автоматизацию процессов.
IAD использует робототехнику, чтобы помочь производственникам работать с деталями и полезной нагрузкой — больше, тяжелее, лучше, быстрее и с меньшей нагрузкой. Используя человеко-машинный интерфейс, оператор и IAD работают в тандеме для оптимизации подъемных, направляющих и позиционирующих движений. Датчики, мощность компьютера и алгоритмы управления переводят движения рук оператора в сверхчеловеческую подъемную силу.
Новые конфигурации роботов
Поскольку технология и экономические последствия закона Мура продолжают изменять вычислительную мощность и цену, мы должны ожидать больше инноваций, более экономичных конфигураций роботов, больше приложений, выходящих за рамки традиционного акцента на услуги «тупого официанта».
Самое большое изменение в промышленных роботах заключается в том, что они будут эволюционировать в более широкий спектр структур и механизмов. Во многих случаях конфигурации, которые превращаются в новые системы автоматизации, не сразу распознаются как роботы. Например, роботы, автоматизирующие производство полупроводников, уже сильно отличаются от тех, что используются на автомобильных заводах.
Например, роботы, автоматизирующие производство полупроводников, уже сильно отличаются от тех, что используются на автомобильных заводах.
Мы увидим день, когда таких роботов с программируемыми инструментами будет больше, чем всех традиционных роботов, существующих сегодня в мире. Грядут огромные морские перемены; потенциал значителен, потому что скоро роботы предложат не только повышенную экономическую эффективность, но и преимущества и операции, которые никогда раньше не были возможны.
Предвидение
Несмотря на желание исследователей роботов подражать человеческой внешности и интеллекту, этого просто не произошло. Большинство роботов до сих пор не видят – универсальное и быстрое распознавание объектов все еще не совсем достижимо. И очень мало примеров двуногих прямоходящих роботов, таких как Honda P3, которые в основном используются для исследований или демонстраций образцов.
Относительно небольшое количество промышленных роботов интегрировано с системами машинного зрения, поэтому это называется машинным зрением, а не зрением роботов. Первые пользователи машинного зрения заплатили очень высокую цену из-за технических знаний, необходимых для «настройки» таких систем. Например, в середине 1980-х годов гибкая производственная система от Cincinnati Milacron включала систему визуального наведения стоимостью 900 000 долларов. К 1998 году средние цены упали до 40 000 долларов и продолжали снижаться.
Первые пользователи машинного зрения заплатили очень высокую цену из-за технических знаний, необходимых для «настройки» таких систем. Например, в середине 1980-х годов гибкая производственная система от Cincinnati Milacron включала систему визуального наведения стоимостью 900 000 долларов. К 1998 году средние цены упали до 40 000 долларов и продолжали снижаться.
Сегодня простые датчики машинного зрения с сопоставлением с образцом можно приобрести менее чем за 2000 долларов у компаний Cognex, Omron и других компаний. Снижение цен отражает сегодняшнее снижение затрат на компьютеры и целенаправленную разработку систем технического зрения для конкретных задач, таких как контроль.
Роботы уже используются повсеместно
Продажи промышленных роботов выросли до рекордного уровня, и у них есть огромный неиспользованный потенциал для выполнения домашних дел, таких как стрижка газона и чистка ковров пылесосом. В прошлом году в эксплуатации находились 3000 подводных роботов, 2300 роботов-разрушителей и 1600 хирургических роботов.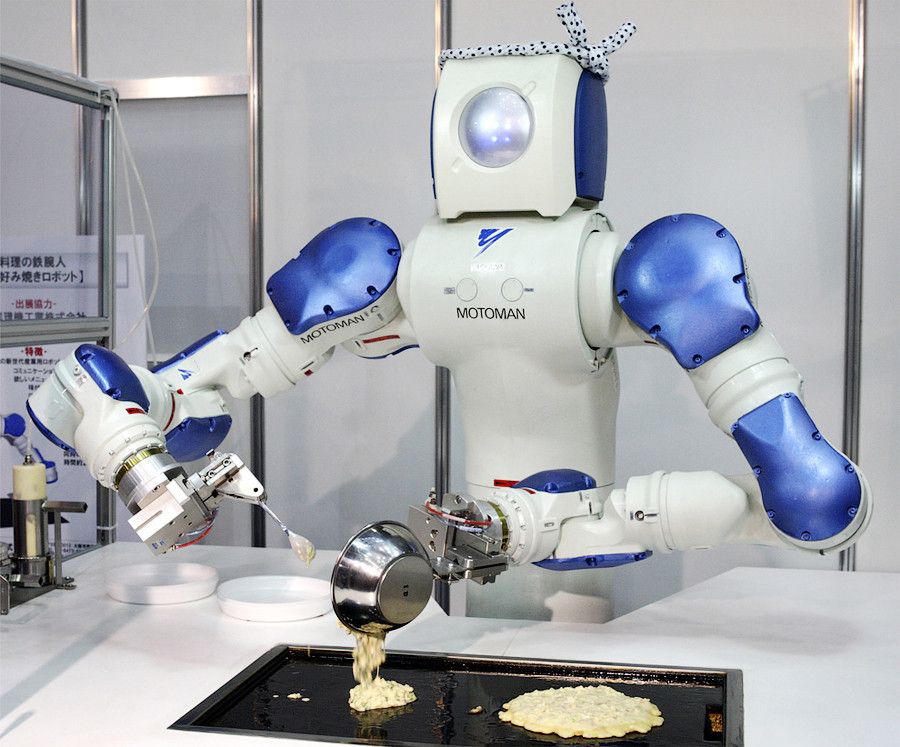 Прогнозируется значительное увеличение количества бытовых роботов для уборки пылесосом и стрижки газонов с 12 500 в 2000 году до почти 500 000 к концу 2004 года. Робот для уборки пола Roomba от IBot теперь доступен по цене менее 200 долларов.
Прогнозируется значительное увеличение количества бытовых роботов для уборки пылесосом и стрижки газонов с 12 500 в 2000 году до почти 500 000 к концу 2004 года. Робот для уборки пола Roomba от IBot теперь доступен по цене менее 200 долларов.
После недавних опасений по поводу сибирской язвы роботы все чаще используются для сортировки почтовых отправлений. Действительно, существует огромный потенциал для механизации почтовой службы США. В прошлом году для сортировки посылок было установлено около 1000 роботов, а почтовая служба США оценила потенциал использования до 80 000 роботов для сортировки.
Посмотрите на «роботов», окружающих нас сегодня: автоматические заправочные колонки, банковские банкоматы, кассы самообслуживания — машины, которые уже заменяют многие рабочие места в сфере обслуживания.
Перенесемся еще на несколько десятилетий вперед. Не нужно большого прыжка веры, чтобы представить себе, как прогресс в обработке изображений, быстродействии микропроцессора и моделировании человека может привести к автоматизации самых скучных, низкоинтеллектуальных и низкооплачиваемых работ.
Маршалл Брейн (да, это его имя), основатель HowStuffWorks.com, написал несколько интересных эссе о робототехнике будущего, которые стоит прочитать. Он считает вполне вероятным, что в течение следующих 40 лет роботы заменят большую часть человеческих рабочих мест. Согласно прогнозам Брэйна, изложенным в его эссе «Нация роботов», человекоподобные роботы станут широко доступны к 2030 году. Они заменят рабочие места, которые в настоящее время занимают люди, такие как фаст-фуд, уборка дома и розничная торговля. По оценкам Brain, если не будут найдены способы компенсировать эти потерянные рабочие места, более 50% американцев могут остаться без работы к 2055 году, и их заменят роботы.
Для получения дополнительной информации нажмите здесь
Вам понравилась эта замечательная статья?
Ознакомьтесь с нашими бесплатными электронными информационными бюллетенями, чтобы прочитать больше замечательных статей.
Подписаться
Робототехника, интеллектуальные материалы и их влияние на человека в будущем
Что такое робот? Что такое умный материал? Как эти двое могут так сильно повлиять на нашу будущую жизнь? В этой статье мы рассмотрим истинный потенциал робототехники и, в частности, мягкой умной робототехники. Эти технологии призваны перевернуть наше представление о том, что такое робот и как он может помочь нам и миру, в котором мы живем, с ног на голову. Вместо того, чтобы думать о роботах как о больших, жестких и устойчивых машинах, мы можем рассматривать будущих роботов как искусственные роботизированные организмы, свойства которых имитируют и значительно расширяют возможности естественных организмов. Уникальные свойства мягкости и податливости делают эти машины идеально подходящими для взаимодействия с деликатными вещами, в том числе с человеческим телом. Кроме того, мы коснемся еще не рассмотренных концепций новой робототехники, включая их биоразлагаемость и регенеративную передачу энергии. Как эти новые технологии в конечном итоге будут управлять робототехникой, и точная форма будущих роботов неизвестна, но здесь мы можем хотя бы мельком увидеть будущее влияние робототехники на людей.
Как эти новые технологии в конечном итоге будут управлять робототехникой, и точная форма будущих роботов неизвестна, но здесь мы можем хотя бы мельком увидеть будущее влияние робототехники на людей.
Девятнадцатый век ознаменовался ускорением и широким распространением промышленных процессов. В начале века промышленная революция была в разгаре, а к концу мы разработали машину и как раз собирались продемонстрировать полет на двигателе. Воздействие на жизнь людей было огромным; социальные и экономические правила, регулирующие путешествия, здравоохранение, производство, рабочую среду и домашнюю жизнь, были переписаны. В двадцатом веке этот процесс повторился с технологической революцией, но гораздо более быстрыми темпами. Технологии переместились из лаборатории и научно-исследовательского института в дом. Новые области электроники, телекоммуникаций, автоматизации и вычислений были движущими силами, а не механическими системами прошлого века. В начале 1900-х телефонов почти не было, но на заре тысячелетия мобильные телефоны были обыденным зрелищем; компьютеры были почти неслыханны сто лет назад, но стали универсальными. Сейчас мы находимся на пороге нового технологического сдвига, равнозначного по значимости: революции робототехники. Эта революция поставит XXI век на центральное место в истории. Что еще более важно, это необратимо повлияет на всю нашу жизнь и жизнь будущих поколений.
Сейчас мы находимся на пороге нового технологического сдвига, равнозначного по значимости: революции робототехники. Эта революция поставит XXI век на центральное место в истории. Что еще более важно, это необратимо повлияет на всю нашу жизнь и жизнь будущих поколений.
От судоходства и строительства до космического пространства, оригами может придать новый вид конструированию конструкций. Эта конструкция оригами состоит из двенадцати взаимосвязанных трубок, которые можно складывать для удобства транспортировки.
Но что такое робототехническая революция и что она даст на самом деле? Чтобы ответить на этот вопрос, мы должны изучить, что такое робот; какие новые технологии, такие как интеллектуальные материалы, появляются, которые изменят определение робота; и как роботы повлияют на жизнь людей и здоровье планеты. Если мы вкратце вернемся к двум предшествующим революциям — промышленной и технологической, — то увидим, что они характеризовались развитием двух совершенно разных концепций: механической и электрической. С другой стороны, робототехника использует сочетание механических систем, электрических систем и новых методов вычислений и интеллекта. Именно благодаря сочетанию лучшего из множества существующих и новых технологий разрабатывается и будет разрабатываться поразительный спектр роботов и роботизированных систем.
С другой стороны, робототехника использует сочетание механических систем, электрических систем и новых методов вычислений и интеллекта. Именно благодаря сочетанию лучшего из множества существующих и новых технологий разрабатывается и будет разрабатываться поразительный спектр роботов и роботизированных систем.
Роботы: от угрозы холодной войны к будущему спасителю
«Робот» часто определяется с точки зрения его возможностей — это машина, которая может автоматически выполнять сложную серию действий, особенно программируемых компьютером. Это полезное определение охватывает большую часть обычных роботов, которых вы видите в научно-фантастических фильмах. Это определение и вес устоявшихся культурных представлений о том, что такое робот, влияют на наши взгляды на то, каким робот может быть. Лучшее свидетельство этого можно увидеть, изучив культурное отношение к роботам во всем мире. Если мы введем слово «робот» в англоязычную версию поисковой системы Google, мы получим изображения, которые почти исключительно гуманоидны, блестящие, жесткие по структуре и почти клинические (см.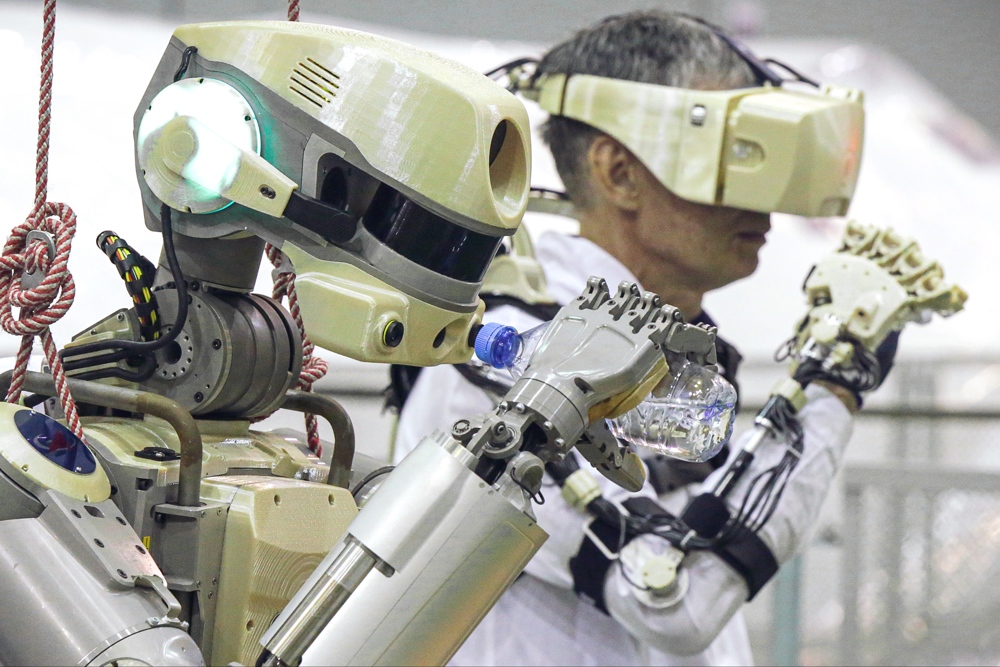 рис. 1а). Они также включают в себя несколько довольно темных и агрессивно выглядящих роботов военного типа. Эти результаты значительно искажены культурным корпусом, который Google использует для анализа этих мнений. Если мы выполним тот же поиск на японском сайте Google (используя ロボット, японское слово, обозначающее робот), мы получим другой набор результатов, как показано на рисунке 1b. Эти результаты показывают гораздо более дружелюбных и доступных роботов с меньшим количеством человеческих черт и большим количеством мультяшных и животных изображений. Причина этого различия историческая и связана с послевоенным культурным переплетением новых технологий, в частности робототехники, с холодной войной. Роботы стали образцами инопланетной угрозы. Напротив, Япония не страдала от этих предрассудков, и поэтому роботы считались безобидными существами. Последствия этих исторических и культурных различий в развитии робототехники глубоки: западная робототехника тесно связана с военными исследованиями, тогда как восточная робототехника ориентирована на помощь, здравоохранение и промышленность.
рис. 1а). Они также включают в себя несколько довольно темных и агрессивно выглядящих роботов военного типа. Эти результаты значительно искажены культурным корпусом, который Google использует для анализа этих мнений. Если мы выполним тот же поиск на японском сайте Google (используя ロボット, японское слово, обозначающее робот), мы получим другой набор результатов, как показано на рисунке 1b. Эти результаты показывают гораздо более дружелюбных и доступных роботов с меньшим количеством человеческих черт и большим количеством мультяшных и животных изображений. Причина этого различия историческая и связана с послевоенным культурным переплетением новых технологий, в частности робототехники, с холодной войной. Роботы стали образцами инопланетной угрозы. Напротив, Япония не страдала от этих предрассудков, и поэтому роботы считались безобидными существами. Последствия этих исторических и культурных различий в развитии робототехники глубоки: западная робототехника тесно связана с военными исследованиями, тогда как восточная робототехника ориентирована на помощь, здравоохранение и промышленность. Этот культурный фон также увековечивает наши предвзятые взгляды на то, как должен выглядеть робот и как он должен себя вести.
Этот культурный фон также увековечивает наши предвзятые взгляды на то, как должен выглядеть робот и как он должен себя вести.
Теперь у нас есть возможность оторваться от этих условностей. Роботу не обязательно быть гуманоидом, иметь конечности, ходить или говорить. Скорее, у нас может быть гораздо более широкая интерпретация того, что такое робот. Границы между интеллектуальными материалами, искусственным интеллектом, воплощением, биологией и робототехникой стираются. Вот как робототехника действительно повлияет на человеческую расу в ближайшие двадцать-сорок лет. И какое влияние мы можем ожидать! От роботов, которые могут следить за окружающей средой и восстанавливать ее, до нанороботов, которые выслеживают и убивают рак, и от роботов, которые проложат путь к колонизации планеты, до роботов-компаньонов, которые уберегут нас от одиночества в старости. Нет такой части нашего общества или жизни, на которую не повлияет робототехника будущего. Короче говоря, они станут вездесущими.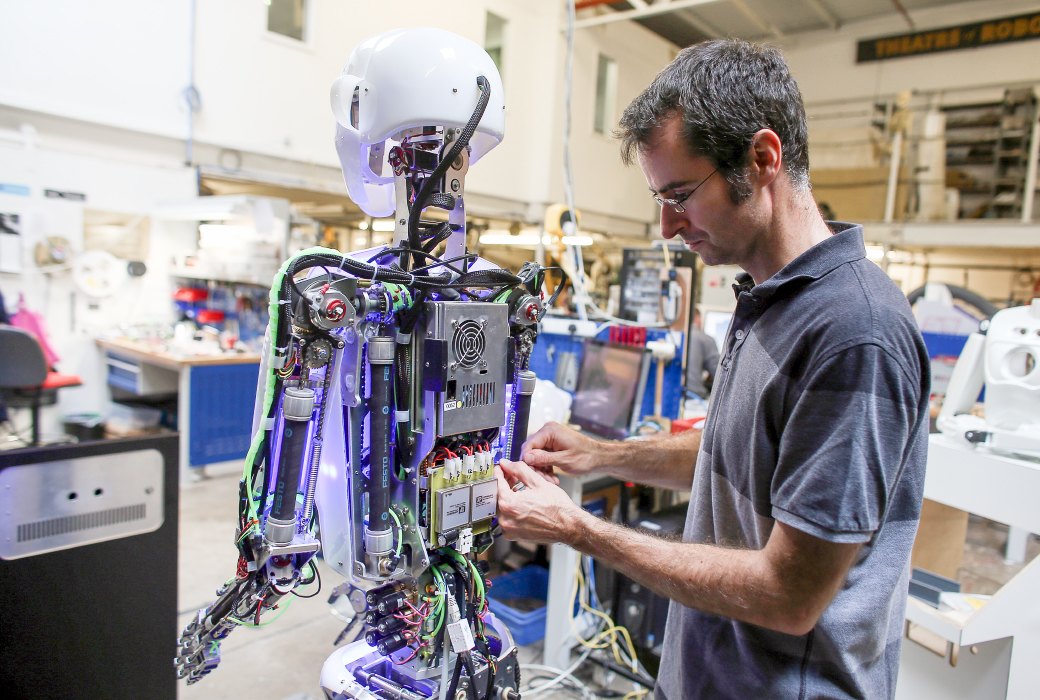
К вездесущим роботизированным организмам
Природа всегда находила способы использовать и адаптироваться к различиям в условиях окружающей среды. Благодаря эволюционной адаптации появилось множество организмов, которые функционируют и процветают в разнообразных и часто экстремальных условиях. Например, тихоходки (Schokraie et al., 2012) способны выдерживать давление, превышающее давление в самых глубоких океанах и в космосе, могут выдерживать температуры от 1 К (-272 °C) до 420 К (150 °C) и может обходиться без еды в течение тридцати лет. Организмы часто действуют в симбиозе с другими. Средний человек, например, имеет около 30 триллионов клеток, но содержит около 40 триллионов бактерий (Sender et al., 2016). Они покрывают чешую от мельчайших свободноживущих бактерий, Pelagibacter ubique, длиной около 0,5 мкм до синего кита длиной около тридцати метров. Это диапазон длин на 7 порядков и примерно 15 порядков по объему! Эти поразительные факты показывают, что если природа может использовать одни и те же биологические строительные блоки (ДНК, аминокислоты и т. д.) для такого удивительного разнообразия организмов, мы тоже можем использовать наши роботизированные строительные блоки для покрытия гораздо более широкого диапазона сред и приложений, чем мы делаем в настоящее время. Таким образом, мы сможем соответствовать повсеместному распространению природных организмов.
д.) для такого удивительного разнообразия организмов, мы тоже можем использовать наши роботизированные строительные блоки для покрытия гораздо более широкого диапазона сред и приложений, чем мы делаем в настоящее время. Таким образом, мы сможем соответствовать повсеместному распространению природных организмов.
Чтобы добиться вездесущности роботов, нам нужно не только изучать и воспроизводить достижения природы, но и выходить за их пределы с более быстрым (определенно более быстрым, чем эволюционные временные рамки!) развитием и более общими и адаптируемыми технологиями. Еще один способ думать о будущих роботах — это как об искусственных организмах. Вместо обычного робота, который можно разложить на механическую, электрическую и вычислительную области, мы можем думать о роботе с точки зрения его биологического аналога, имеющего три основных компонента: тело, мозг и желудок. В биологических организмах энергия преобразуется в желудке и распределяется по телу для питания мышц и мозга, который, в свою очередь, управляет организмами. Таким образом, существует функциональная эквивалентность между организмом робота и естественным организмом: мозг эквивалентен компьютеру или системе управления; корпус эквивалентен механической конструкции робота; а желудок эквивалентен источнику питания робота, будь то батарея, солнечная батарея или любой другой источник питания. Преимущество парадигмы искусственного организма заключается в том, что нас поощряют использовать и выходить за рамки всех характеристик биологических организмов. Они охватывают качества, которые в значительной степени не учитываются в современных исследованиях робототехники, включая работу в различных и суровых условиях, благоприятную интеграцию в окружающую среду, размножение, смерть и разложение. Все это необходимо для разработки повсеместно распространенных роботизированных организмов.
Таким образом, существует функциональная эквивалентность между организмом робота и естественным организмом: мозг эквивалентен компьютеру или системе управления; корпус эквивалентен механической конструкции робота; а желудок эквивалентен источнику питания робота, будь то батарея, солнечная батарея или любой другой источник питания. Преимущество парадигмы искусственного организма заключается в том, что нас поощряют использовать и выходить за рамки всех характеристик биологических организмов. Они охватывают качества, которые в значительной степени не учитываются в современных исследованиях робототехники, включая работу в различных и суровых условиях, благоприятную интеграцию в окружающую среду, размножение, смерть и разложение. Все это необходимо для разработки повсеместно распространенных роботизированных организмов.
Реализация этой цели достижима только путем согласованных исследований в области интеллектуальных материалов, синтетической биологии, искусственного интеллекта и адаптации. Здесь мы сосредоточимся на разработке новых интеллектуальных материалов для робототехники, но также увидим, что разработка материалов не может происходить в отрыве от других столь необходимых областей исследований.
Здесь мы сосредоточимся на разработке новых интеллектуальных материалов для робототехники, но также увидим, что разработка материалов не может происходить в отрыве от других столь необходимых областей исследований.
Интеллектуальные материалы для мягких роботов
Интеллектуальный материал — это материал, который проявляет некоторый наблюдаемый эффект в одной области при стимуляции через другую область. Они охватывают все области, включая механическую, электрическую, химическую, оптическую, тепловую и так далее. Например, термохромный материал меняет цвет при нагревании, в то время как электроактивный полимер генерирует механический выходной сигнал (то есть движется) при электрическом воздействии (Bar-Cohen, 2004). Умные материалы могут добавить новые возможности робототехнике и особенно искусственным организмам. Вам нужен робот, который может отслеживать химические вещества? Вы можете использовать умный материал, который меняет электрические свойства под воздействием химического вещества. Вам нужно роботизированное устройство, которое можно было бы имплантировать человеку, но которое полностью разложится после того, как выполнит свою работу? Вы можете использовать биоразлагаемые, биосовместимые и селективно растворяющиеся полимеры. «Умность» интеллектуальных материалов можно даже измерить количественно. Их IQ можно рассчитать, оценив их реакцию, подвижность и сложность (например, количество фазовых изменений, которые они могут претерпевать) (Cao et al., 19).99). Если мы объединим несколько интеллектуальных материалов в одном роботе, мы можем значительно повысить IQ его тела.
Вам нужно роботизированное устройство, которое можно было бы имплантировать человеку, но которое полностью разложится после того, как выполнит свою работу? Вы можете использовать биоразлагаемые, биосовместимые и селективно растворяющиеся полимеры. «Умность» интеллектуальных материалов можно даже измерить количественно. Их IQ можно рассчитать, оценив их реакцию, подвижность и сложность (например, количество фазовых изменений, которые они могут претерпевать) (Cao et al., 19).99). Если мы объединим несколько интеллектуальных материалов в одном роботе, мы можем значительно повысить IQ его тела.
По часовой стрелке, сверху слева: простейшие жгутиконосцы Euglena; космополитная тихоходка Milnesium tardigradum; и миметический осьминог Thaumoctopus mimicus.
Интеллектуальные материалы могут быть твердыми, например пьезоматериалы (Кюри и Кюри, 1881 г.), гибкими, например, сплавы с памятью формы (Ву и Уэйман, 1987 г.), мягкими, например диэлектрические эластомеры (Пелрин и др., 2000 г.), и даже жидкостные, такие как феррожидкости (Albrecht et al. , 1997) и электрореологические жидкости (Winslow, 1949). Это показывает большую легкость и разнообразие этих материалов, которые в значительной степени обладают тем же набором физических свойств (жесткость, эластичность, вязкость), что и биологические ткани. Один важный момент, который следует признать почти во всех биологических организмах и, конечно же, во всех животных, — это их зависимость от мягкости. Ни одно животное, большое или маленькое, насекомое или млекопитающее, рептилия или рыба, не является абсолютно твердым. Даже насекомые с их жестким экзоскелетом внутренне мягкие и податливые. С этим напрямую связана зависимость природы от приведения в действие (генерация движения и сил) мягких тканей, таких как мышцы. Скромный таракан — отличный тому пример; хотя у него очень жесткое и твердое тело, его конечности сочленены мягкой мышечной тканью (Jahromi and Atwood, 19).69). Если мы присмотримся к царству животных, мы увидим множество организмов, которые почти полностью мягкие. К ним относятся черви, слизни, моллюски, головоногие и более мелкие водоросли, такие как эвглена.
, 1997) и электрореологические жидкости (Winslow, 1949). Это показывает большую легкость и разнообразие этих материалов, которые в значительной степени обладают тем же набором физических свойств (жесткость, эластичность, вязкость), что и биологические ткани. Один важный момент, который следует признать почти во всех биологических организмах и, конечно же, во всех животных, — это их зависимость от мягкости. Ни одно животное, большое или маленькое, насекомое или млекопитающее, рептилия или рыба, не является абсолютно твердым. Даже насекомые с их жестким экзоскелетом внутренне мягкие и податливые. С этим напрямую связана зависимость природы от приведения в действие (генерация движения и сил) мягких тканей, таких как мышцы. Скромный таракан — отличный тому пример; хотя у него очень жесткое и твердое тело, его конечности сочленены мягкой мышечной тканью (Jahromi and Atwood, 19).69). Если мы присмотримся к царству животных, мы увидим множество организмов, которые почти полностью мягкие. К ним относятся черви, слизни, моллюски, головоногие и более мелкие водоросли, такие как эвглена. Они используют свою мягкость, чтобы сгибаться, скручиваться и сжиматься, чтобы менять форму, прятаться и передвигаться. Осьминог, например, может вылезти из контейнера через отверстие менее одной десятой диаметра его тела (Mather, 2006). Несмотря на свою мягкость, они также могут генерировать силу, достаточную для того, чтобы раздавить предметы и другие организмы, и в то же время достаточно ловкие, чтобы отвинтить крышку банки (BBC, 2003). Такие заметные деформации тела стали возможными не только благодаря мягким мышечным тканям, но и благодаря использованию гидравлических и гидростатических принципов, позволяющих контролировать изменение жесткости (Kier and Smith, 19).85).
Они используют свою мягкость, чтобы сгибаться, скручиваться и сжиматься, чтобы менять форму, прятаться и передвигаться. Осьминог, например, может вылезти из контейнера через отверстие менее одной десятой диаметра его тела (Mather, 2006). Несмотря на свою мягкость, они также могут генерировать силу, достаточную для того, чтобы раздавить предметы и другие организмы, и в то же время достаточно ловкие, чтобы отвинтить крышку банки (BBC, 2003). Такие заметные деформации тела стали возможными не только благодаря мягким мышечным тканям, но и благодаря использованию гидравлических и гидростатических принципов, позволяющих контролировать изменение жесткости (Kier and Smith, 19).85).
Теперь у нас есть множество примеров того, что можно сделать с мягкими материалами, и мы хотим использовать эти возможности в наших роботах. Давайте теперь посмотрим на некоторые из технологий, которые потенциально могут предоставить эту возможность. Современные технологии мягкой робототехники можно разделить на три группы: 1) гидравлические и пневматические мягкие системы; 2) интеллектуальные материалы привода и датчиков; и 3) материалы с изменяющейся жесткостью. В последние годы мягкая робототехника вышла на первый план благодаря возрождению систем жидкостного привода в сочетании с более глубоким пониманием и моделированием эластомерных материалов. Несмотря на то, что была проделана большая работа по совершенствованию пневматических приводов с плетеной резиной (Meller et al., 2014), этот подход, основанный на дискретных компонентах, ограничивает диапазон его применения.
В последние годы мягкая робототехника вышла на первый план благодаря возрождению систем жидкостного привода в сочетании с более глубоким пониманием и моделированием эластомерных материалов. Несмотря на то, что была проделана большая работа по совершенствованию пневматических приводов с плетеной резиной (Meller et al., 2014), этот подход, основанный на дискретных компонентах, ограничивает диапазон его применения.
Лучший подход показан в классе роботов-приводов pneunet (Ilievski et al., 2011) и их эволюции в носимые мягкие устройства (Polygerinos et al., 2015) и надежные роботы (Tolley et al., 2014). Пневнеты представляют собой монолитные многокамерные пневматические конструкции из силиконовых и полиуретановых эластомеров. К сожалению, гидравлические и пневматические системы сильно ограничены из-за необходимости использования внешних насосов, резервуаров для воздуха/жидкости и клапанов. Они значительно увеличивают объем и вес робота и уменьшают его мягкость. Гораздо лучший подход — работать над системами, которые не полагаются на такие громоздкие вспомогательные устройства. Приводы и датчики из интеллектуальных материалов могут обеспечить это, заменив давление жидкости электрическими, тепловыми или фотонными эффектами. Например, электроактивные полимеры (ЭАП) превращают электрическую энергию в механическую деформацию. На рисунках 2 и 3 показаны две распространенные формы EAP: диэлектрический эластомерный привод (DEA) (Pelrine et al., 2000) и ионно-полимерный привод (IPA) (Shahinpoor and Kim, 2001). DEA состоит из центрального эластомерного слоя с высокой диэлектрической проницаемостью, расположенного между двумя податливыми электродными слоями. Когда к композитной структуре прикладывается сильное электрическое поле (порядка МВ/м), противоположные заряды собираются на двух электродах и притягиваются кулоновскими силами, обозначенными на рис. он сжимается между электродами и расширяется в плоскости, обозначенной ε на рисунке 2. Поскольку кулоновские силы обратно пропорциональны разделению зарядов, а электроды расширяются при срабатывании, что приводит к увеличению площади сбора заряда, индуцированное напряжение в DEA привод пропорционален квадрату напряженности электрического поля.
Приводы и датчики из интеллектуальных материалов могут обеспечить это, заменив давление жидкости электрическими, тепловыми или фотонными эффектами. Например, электроактивные полимеры (ЭАП) превращают электрическую энергию в механическую деформацию. На рисунках 2 и 3 показаны две распространенные формы EAP: диэлектрический эластомерный привод (DEA) (Pelrine et al., 2000) и ионно-полимерный привод (IPA) (Shahinpoor and Kim, 2001). DEA состоит из центрального эластомерного слоя с высокой диэлектрической проницаемостью, расположенного между двумя податливыми электродными слоями. Когда к композитной структуре прикладывается сильное электрическое поле (порядка МВ/м), противоположные заряды собираются на двух электродах и притягиваются кулоновскими силами, обозначенными на рис. он сжимается между электродами и расширяется в плоскости, обозначенной ε на рисунке 2. Поскольку кулоновские силы обратно пропорциональны разделению зарядов, а электроды расширяются при срабатывании, что приводит к увеличению площади сбора заряда, индуцированное напряжение в DEA привод пропорционален квадрату напряженности электрического поля. Это побуждает нас делать слой эластомера как можно тоньше. К сожалению, более тонкий слой эластомера означает, что нам нужно больше слоев, чтобы сделать нашего робота, и, следовательно, выше вероятность производственного брака или электрического пробоя. Поскольку DEA имеют плотность мощности, близкую к биологическим мышцам (Pelrine et al., 2000), они являются хорошими кандидатами для разработки в носимых вспомогательных устройствах и искусственных организмах.
Это побуждает нас делать слой эластомера как можно тоньше. К сожалению, более тонкий слой эластомера означает, что нам нужно больше слоев, чтобы сделать нашего робота, и, следовательно, выше вероятность производственного брака или электрического пробоя. Поскольку DEA имеют плотность мощности, близкую к биологическим мышцам (Pelrine et al., 2000), они являются хорошими кандидатами для разработки в носимых вспомогательных устройствах и искусственных организмах.
Ионные полимерные приводы, с другой стороны, представляют собой интеллектуальные материалы, которые работают по другому электромеханическому принципу, как показано на рис. 3. IPA изготавливается из центрального слоя ионного проводника, снова заключенного между двумя проводящими электродами, но в в отличие от ДЭА электрическое поле намного ниже (кВ/м), поэтому электроды должны быть более проводящими. При приложении электрического поля свободные ионы внутри ионного проводника перемещаются к электродам, где они собираются. Высокая концентрация ионов на электродах заставляет их расширяться, поскольку одноименные заряды отталкиваются из-за локальных кулоновских сил. Если катионы (+) и ионы (-) значительно различаются по размеру и заряду, расширение двух электродов будет несоответствием, и ИПС будет изгибаться. Преимущество IPA заключается в том, что он работает при гораздо более низких напряжениях, чем DEA, но может генерировать только меньшие силы. Более поздним дополнением к портфелю интеллектуальных материалов является спиральный нейлоновый привод (Haines et al., 2014). Это термопривод, изготовленный из цельной нейлоновой нити с закрученной вставкой. При нагревании эта структура сжимается. Хотя привод с нейлоновой катушкой потенциально может обеспечить недорогую и надежную мягкую робототехнику, его термальный цикл является проклятием. Как и во всех других термоприводах, включая сплавы с памятью формы, относительно просто нагреть структуру (и тем самым вызвать сокращение мышечной нити), но гораздо сложнее обратить это вспять и охладить устройство.
Высокая концентрация ионов на электродах заставляет их расширяться, поскольку одноименные заряды отталкиваются из-за локальных кулоновских сил. Если катионы (+) и ионы (-) значительно различаются по размеру и заряду, расширение двух электродов будет несоответствием, и ИПС будет изгибаться. Преимущество IPA заключается в том, что он работает при гораздо более низких напряжениях, чем DEA, но может генерировать только меньшие силы. Более поздним дополнением к портфелю интеллектуальных материалов является спиральный нейлоновый привод (Haines et al., 2014). Это термопривод, изготовленный из цельной нейлоновой нити с закрученной вставкой. При нагревании эта структура сжимается. Хотя привод с нейлоновой катушкой потенциально может обеспечить недорогую и надежную мягкую робототехнику, его термальный цикл является проклятием. Как и во всех других термоприводах, включая сплавы с памятью формы, относительно просто нагреть структуру (и тем самым вызвать сокращение мышечной нити), но гораздо сложнее обратить это вспять и охладить устройство. В результате скорость цикла нейлоновых (и SMA) приводов составляет менее 10 Гц. Напротив, DEA и IPA были продемонстрированы на частоте 100 Гц, и было показано, что DEA даже работает как громкоговоритель (Keplinger et al., 2013).
В результате скорость цикла нейлоновых (и SMA) приводов составляет менее 10 Гц. Напротив, DEA и IPA были продемонстрированы на частоте 100 Гц, и было показано, что DEA даже работает как громкоговоритель (Keplinger et al., 2013).
Последней способностью, необходимой для реализации тела мягких роботизированных организмов, является изменение жесткости. Хотя это может быть достигнуто за счет активации мышц, как у осьминога, существует ряд мягких роботизированных технологий, которые могут достигать модуляции жесткости независимо от срабатывания. К ним относятся полимеры с памятью формы (SMP) и гранулированное заклинивание. SMP представляют собой полимеры, которые претерпевают контролируемый и обратимый фазовый переход из жесткого стеклообразного состояния в мягкое каучукоподобное состояние (Lendlein et al., 2002). Чаще всего они стимулируются теплом, но некоторые СМП переходят между фазами при фотонной или электрической стимуляции. Замечательным свойством SMP является их способность «запоминать» запрограммированное состояние. Таким образом, SMP-робот может переключаться между мягким и жестким режимами, а когда операция завершена, его можно заставить автоматически возвращаться в заранее запрограммированную форму. Одна захватывающая возможность SMP состоит в том, чтобы объединить их с исполнительными механизмами, которые сами стимулируются одним и тем же источником энергии. Например, термически управляемый полимер с памятью формы можно комбинировать с термическим SMP, чтобы получить сложную структуру, которая включает в себя срабатывание, изменение жесткости и память в одном блоке, управляемом исключительно теплом (Rossiter et al., 2014). Заклинивание гранул, в отличие от фазового перехода СМП, является более механическим механизмом (Amend et al., 2012). Податливая камера заполнена гранулированными материалами, и жесткость камеры можно контролировать, нагнетая в нее и из нее жидкость, например воздух. Когда воздух откачивается из камеры, атмосферное давление из-за вакуума внутри камеры приводит к тому, что гранулы сжимаются вместе и становятся жесткими.
Таким образом, SMP-робот может переключаться между мягким и жестким режимами, а когда операция завершена, его можно заставить автоматически возвращаться в заранее запрограммированную форму. Одна захватывающая возможность SMP состоит в том, чтобы объединить их с исполнительными механизмами, которые сами стимулируются одним и тем же источником энергии. Например, термически управляемый полимер с памятью формы можно комбинировать с термическим SMP, чтобы получить сложную структуру, которая включает в себя срабатывание, изменение жесткости и память в одном блоке, управляемом исключительно теплом (Rossiter et al., 2014). Заклинивание гранул, в отличие от фазового перехода СМП, является более механическим механизмом (Amend et al., 2012). Податливая камера заполнена гранулированными материалами, и жесткость камеры можно контролировать, нагнетая в нее и из нее жидкость, например воздух. Когда воздух откачивается из камеры, атмосферное давление из-за вакуума внутри камеры приводит к тому, что гранулы сжимаются вместе и становятся жесткими. Таким образом, можно создать бинарную структуру с изменяющейся жесткостью. Такая композитная структура очень подходит для носимых вспомогательных устройств и исследовательских роботов.
Таким образом, можно создать бинарную структуру с изменяющейся жесткостью. Такая композитная структура очень подходит для носимых вспомогательных устройств и исследовательских роботов.
Роботы там, где их не ждешь
Коснувшись выше технологий, которые дадут нам новое поколение робототехники, давайте теперь рассмотрим, как эти роботы могут появиться в нашей жизни и как мы будем взаимодействовать и жить с ними. их.
Smart Skins
Соответствие требованиям мягких робототехники делает их идеально подходящими для непосредственного взаимодействия с биологическими тканями. Мягко-мягкие взаимодействия мягкого робота и человека по своей природе намного безопаснее, чем жесткий-мягкий интерфейс, навязываемый обычными жесткими роботами. Было проделано много работы над интеллектуальными материалами для прямого контакта кожи с кожей и интеграции с кожей человека, включая электрические соединения и электронные компоненты (Kim et al., 2011). Функциональная мягкая роботизированная вторая кожа может предложить множество преимуществ по сравнению с обычной одеждой. Например, он может имитировать способности головоногих к изменению цвета (Morin et al., 2012) или может перемещать жидкости, как костистые рыбы (Rossiter et al., 2012), и тем самым регулировать температуру. Естественным продолжением такой кожи являются умные повязки, способствующие заживлению и уменьшающие распространение бактерий, устойчивых к микробам, за счет снижения потребности в антибиотиках. Конечно, шкуры могут заменить одежду, но мы далеки от общественного принятия второй кожи в качестве замены обычной одежды. Если, с другой стороны, мы используем волокнистые технологии мягкого срабатывания, такие как привод с нейлоновой катушкой и сплав-полимерные композиты с памятью формы (Rossiter et al., 2014), мы можем вплести искусственные мышцы в ткань. Это дает возможность активной и реактивной одежды. Такая «умная» одежда также предлагает уникальную новую возможность: поскольку «умный» материал находится в непосредственном контакте с кожей и обладает активационными свойствами, он может напрямую механически стимулировать кожу.
Например, он может имитировать способности головоногих к изменению цвета (Morin et al., 2012) или может перемещать жидкости, как костистые рыбы (Rossiter et al., 2012), и тем самым регулировать температуру. Естественным продолжением такой кожи являются умные повязки, способствующие заживлению и уменьшающие распространение бактерий, устойчивых к микробам, за счет снижения потребности в антибиотиках. Конечно, шкуры могут заменить одежду, но мы далеки от общественного принятия второй кожи в качестве замены обычной одежды. Если, с другой стороны, мы используем волокнистые технологии мягкого срабатывания, такие как привод с нейлоновой катушкой и сплав-полимерные композиты с памятью формы (Rossiter et al., 2014), мы можем вплести искусственные мышцы в ткань. Это дает возможность активной и реактивной одежды. Такая «умная» одежда также предлагает уникальную новую возможность: поскольку «умный» материал находится в непосредственном контакте с кожей и обладает активационными свойствами, он может напрямую механически стимулировать кожу. Таким образом, мы можем интегрировать тактильную коммуникацию в одежду. Тактильный канал связи в значительной степени уступил место другим чувствам. Возьмем, к примеру, современный смартфон; он имеет высокую пропускную способность как для визуального, так и для слухового вывода, но почти не имеет сенсорных стимулирующих возможностей. С помощью сенсорной одежды мы можем генерировать естественные «аффективные» чувства осязания, что дает нам потенциально революционный новый канал коммуникации. Вместо грубого вибромотора (как в мобильных телефонах) мы можем гладить, щекотать или иным образом передавать приятные тактильные ощущения (Knoop and Rossiter, 2015).
Таким образом, мы можем интегрировать тактильную коммуникацию в одежду. Тактильный канал связи в значительной степени уступил место другим чувствам. Возьмем, к примеру, современный смартфон; он имеет высокую пропускную способность как для визуального, так и для слухового вывода, но почти не имеет сенсорных стимулирующих возможностей. С помощью сенсорной одежды мы можем генерировать естественные «аффективные» чувства осязания, что дает нам потенциально революционный новый канал коммуникации. Вместо грубого вибромотора (как в мобильных телефонах) мы можем гладить, щекотать или иным образом передавать приятные тактильные ощущения (Knoop and Rossiter, 2015).
Вспомогательные устройства
Если указанная выше умная одежда способна генерировать большую силу, ее можно использовать не только для связи, но и для физической поддержки. Для немощных, инвалидов или пожилых людей будущим решением станет вспомогательная одежда, которая восстановит подвижность. Восстановление мобильности может оказать большое влияние на качество жизни владельца и даже позволить ему вернуться к продуктивной жизни, тем самым помогая экономике в целом. Проблема с таким предложением заключается в плотности мощности технологий срабатывания вспомогательного устройства. Если владелец слаб, например, из-за потери мышечной массы, ему потребуется значительная дополнительная сила, но вес этой дополнительной силы может быть чрезмерно дорогим. Поэтому вспомогательное устройство должно быть как можно более легким и удобным, а приведение в действие должно иметь удельную мощность значительно выше, чем у биологических мышц. В настоящее время это выходит за рамки современного искусства. В конечном итоге носимые вспомогательные устройства сделают обычные вспомогательные устройства излишними. Зачем использовать инвалидное кресло, если вы можете снова ходить, надев мягкие роботизированные штаны Power Pants?
Проблема с таким предложением заключается в плотности мощности технологий срабатывания вспомогательного устройства. Если владелец слаб, например, из-за потери мышечной массы, ему потребуется значительная дополнительная сила, но вес этой дополнительной силы может быть чрезмерно дорогим. Поэтому вспомогательное устройство должно быть как можно более легким и удобным, а приведение в действие должно иметь удельную мощность значительно выше, чем у биологических мышц. В настоящее время это выходит за рамки современного искусства. В конечном итоге носимые вспомогательные устройства сделают обычные вспомогательные устройства излишними. Зачем использовать инвалидное кресло, если вы можете снова ходить, надев мягкие роботизированные штаны Power Pants?
Медицинские устройства
Мы можем распространить биоинтеграцию на примере носимых устройств, описанных выше, в тело. Поскольку мягкая робототехника настолько удобна для взаимодействия с биологическими тканями, естественно думать об устройстве, которое можно имплантировать в тело и которое может физически взаимодействовать с внутренними структурами. Затем мы можем создавать имплантируемые медицинские устройства, которые могут восстанавливать функциональность больных и поврежденных органов и структур. Возьмем, к примеру, рак мягких тканей, который может поражать органы от кишечника и предстательной железы до гортани и трахеи. При этих заболеваниях типичное лечение включает хирургическое иссечение рака и лечение возникшего состояния. Пациенту с раком гортани может быть проведена ларингэктомия, после чего он не сможет говорить и должен перенести постоянную трахеостомию. Разработав и имплантировав мягкий роботизированный замещающий орган, мы можем восстановить функциональные возможности и позволить пациенту снова говорить, глотать, кашлять и радоваться жизни. Такая биоинтегрирующая мягкая робототехника находится в стадии разработки, и ожидается, что она появится в клинике в течение следующих десяти-пятнадцати лет.
Биоразлагаемые и экологические роботы
Естественно расширить понятие биоинтеграции с домашней (ориентированной на человека) среды на природную среду. В настоящее время роботам, которые работают в естественной среде, мешают лежащие в их основе технологии. Поскольку роботы сделаны из жестких, сложных и вредных для окружающей среды материалов, за ними необходимо постоянно следить. Когда они достигают конца своей продуктивной жизни, они должны быть извлечены и безопасно утилизированы. Если, с другой стороны, мы сможем сделать роботов абсолютно безвредными для окружающей среды, мы сможем меньше заботиться об их восстановлении после отказа. Теперь это возможно благодаря разработке биоразлагаемой мягкой робототехники (Rossiter et al., 2016). Используя «умные» материалы, которые не только экологически безопасны в эксплуатации, но и полностью разлагаются в окружающей среде, мы можем создавать роботов, которые живут, умирают и разлагаются без ущерба для окружающей среды. Это меняет то, как мы размещаем роботов в окружающей среде: вместо того, чтобы отслеживать и отзывать небольшое количество роботов, наносящих ущерб окружающей среде, мы можем использовать тысячи и даже миллионы роботов, зная, что они безопасно деградируют в окружающей среде, не причиняя вреда окружающей среде. наносить ущерб. Естественным продолжением биоразлагаемого робота является съедобный. В этом случае съедобного робота можно съесть; он будет выполнять работу в теле; а затем будет поглощен телом. Это обеспечивает новый метод контролируемой и удобной доставки лекарств и препаратов в организм.
Интеллектуальные мягкие роботы
Все описанные выше мягкие приводы работают как преобразователи. То есть они преобразуют одну форму энергии в другую. Этот эффект трансдукции часто можно обратить вспять. Например, исполнительные механизмы из диэлектрических эластомеров могут быть преобразованы в генераторы из диэлектрических эластомеров (Jin et al., 2011). В таком генераторе мягкая эластомерная мембрана механически деформируется, в результате чего возникает электрическая мощность. Теперь мы можем объединить этот эффект генератора с носимой робототехникой, описанной выше. Носимое исполнительное устройство-генератор может, например, обеспечивать дополнительную мощность при ходьбе в гору, и как только пользователь достигает вершины холма, оно может генерировать энергию от движения тела, когда пользователь неторопливо идет вниз по склону. Этот вид мягкого роботизированного «рекуперативного торможения» — лишь один пример потенциала двунаправленного преобразования энергии в мягкой робототехнике. В таких материалах у нас есть два компонента вычислений: ввод и вывод. Объединив эти возможности со свойствами реагирования на деформации, присущими материалам, мы можем создать роботов, которые могут выполнять вычисления с помощью своих тел. Это мощная новая парадигма, часто описываемая в более общей форме как воплощенный интеллект или морфологическое вычисление (Pfeifer and Gómez, 2009).). С помощью морфологических вычислений мы можем передать низкоуровневое управление телу мягкого робота. Так нужен ли нам мозг в нашем мягком роботизированном организме? Во многих простых мягких роботах мозг может быть избыточным, и все эффективные вычисления выполняются самим телом. Это еще больше упрощает мягкого робота и снова увеличивает его потенциал повсеместного распространения.
Выводы
В этой статье мы лишь поверхностно коснулись того, что такое робот, как его можно представить как мягкий роботизированный организм и как интеллектуальные материалы помогут реализовать и революционизировать будущую робототехнику. Воздействие на людей обсуждалось, но об истинной степени этого воздействия мы можем только догадываться. Точно так же, как влияние Интернета и Всемирной паутины было невозможно предсказать, мы не можем представить, куда нас приведет робототехника будущего. Иммерсивная виртуальная реальность? Безусловно. Замена кузова? Вероятно. Полное разрушение жизни и общества? Вполне возможно! По мере того, как мы идем по пути робототехнической революции, мы будем оглядываться на это десятилетие как на то десятилетие, когда робототехника действительно взлетела и заложила основы нашего будущего мира.
— Альбрехт Т., Бюрер К., Фенле М., Майер К., Платцек Д. и Реске Дж. 1997. «Первое наблюдение ферромагнетизма и ферромагнитных доменов в жидком металле». Applied Physics A: Materials Science & Processing 65(2): 215.
— Amend, JR, Brown, E., Rodenberg, N., Jaeger, HM, and Lipson, H. 2012. «Универсальный захват положительного давления на основе по заклиниванию сыпучего материала». IEEE Transactions on Robotics 28(2): 341–350.
— Бар-Коэн, Ю. (ред.). 2004. Приводы из электроактивного полимера (EAP) как искусственные мышцы — реальность, потенциал и вызов. Беллингем, Вашингтон: SPIE Press (2-е издание).
— Новости Би-би-си. 2003. «Интеллект осьминога: открытие банки». http://news.bbc.co.uk/1/hi/world/europe/2796607.stm. 25 февраля 2003 г. Проверено 10 октября 2016 г. .
— Цао В., Кадни Х. Х. и Васер Р. 1999. «Умные материалы и конструкции». ПНАС 96(15): 8330–8331.
— Кюри, Дж., Кюри, П. 1881. «Сжатия и растяжения, вызываемые напряжениями в полугранях с наклонными гранями» [Сжатия и расширения, вызванные напряжениями в полугранных кристаллах с наклонными гранями]. Comptes rendus (на французском языке) 93: 1137–1140.
— Haines, C.S., et al. 2014. «Искусственные мышцы из лески и швейных ниток». Наука 343 (6173): 868–872.
— Илиевски Ф., Маццео А. Д., Шеперд Р. Ф., Чен X. и Уайтсайдс Г. М. 2011. «Мягкая робототехника для химиков». Angewandte Chemie 123: 1930–1935.
— Джахроми, С. С., Этвуд, Х. Л., 1969. «Особенности строения мышечных волокон в ноге таракана». Журнал физиологии насекомых 15 (12): 2255–2258.
— Джин С., Кох А., Кеплингер С., Ли Т., Бауэр С. и Суо З. 2011 г. «Генераторы из диэлектрических эластомеров: сколько энергии можно преобразовать?» Транзакции IEEE/ASME по мехатронике 16(1).
— Кеплингер К. и др. 2013. «Растяжимые, прозрачные, ионные проводники». Наука 341 (6149): 984–987.
— Киер В. М. и Смит К. К. 1985. «Языки, щупальца и туловище: биомеханика движения в мышечных гидростатах». Зоологический журнал Линнеевского общества 83: 307–324.
— Kim, D.H., et al. 2011. «Эпидермальная электроника». Наука 333 (6044): 838–843.
— Кнуп, Э., Росситер, Дж. 2015. «Щекотка: совместимый носимый тактильный дисплей для поглаживания и щекотки». проц. CHI 2015, 33-я ежегодная конференция ACM по человеческому фактору в вычислительных системах: 1133–1138.
— Лендлейн А., Келч С. (2002). «Полимеры с памятью формы». Ангью. хим. Междунар. Эд. 41: 2034–2057.
— Мазер, Дж. А., 2006 г. «Развитие поведения: перспектива головоногого моллюска». Международный журнал сравнительной психологии 19 (1).
— Меллер, М. А., Брайант, М., и Гарсия, Э. 2014. «Пересмотр мышцы Мак-Киббена: энергетика, операционная жидкость и материал мочевого пузыря». Журнал интеллектуальных материальных систем и конструкций 25: 2276–2293.
— Морин, С. А., Шеперд, Р. Ф., Квок, С. В., Стоукс, А. А., Немироски, А., и Уайтсайдс, Г. М. 2012. «Камуфляж и дисплей для мягких машин». Наука 337 (6096): 828–832.
— Пелрин Р., Корнблух Р., Пей К. и Джозеф Дж. 2000. «Высокоскоростные эластомеры с электрическим приводом и деформацией более 100 %». Наука 287 (5454): 836–839.
— Пфайфер, Р., Гомес, Г. 2009. «Морфологические вычисления — соединение мозга, тела и окружающей среды». Создание интеллекта, подобного мозгу, Конспект лекций по информатике 5436: 66–83.
— Полигеринос П., Ван З., Галлоуэй К. К., Вуд Р. Дж. и Уолш С. Дж. 2015. «Мягкая роботизированная перчатка для комбинированной помощи и реабилитации в домашних условиях». Робототехника и автономные системы 73: 135–143.
— Росситер Дж., Уинфилд Дж. и Иеропулос И. 2016. «Сегодня здесь, завтра нет: биоразлагаемые мягкие роботы». В электроактивных полимерных приводах и устройствах (EAPAD). Беллингем, Вашингтон: SPIE.
— Росситер Дж., Яп Б. и Конн А. 2012. «Биомиметические хроматофоры для маскировки и мягких активных поверхностей». Биовдохновение и биомиметика 7(3).
— Росситер, Дж. М., Такашима, К., и Мукаи, Т. 2014. «Тепловой отклик новых гибридов полимера с памятью формы и сплава с памятью формы». Труды SPIE: поведение и механика многофункциональных материалов и композитов. Беллингем, Вашингтон: SPIE, 9 лет.05810.
— Schokraie, E., et al. 2012. «Сравнительный анализ протеома Milnesium tardigradum в раннем эмбриональном состоянии по сравнению с взрослыми особями в активном и ангидробиотическом состоянии».