Робоногу научили понимать свое строение и искать оптимальные движения
Американские инженеры разработали алгоритм машинного обучения, позволяющий ноге робота самостоятельно определять свою структуру и свойства окружающей среды, а также использовать эти данные для вырабатывания оптимальных движений. В качестве примера авторы показали, как робот с помощью обучения с подкреплением научился двигать ногой конвейерную ленту. Статья с описанием алгоритма и экспериментов опубликована в журнале Nature Machine Intelligence.
Как правило, за походку робота отвечает заранее определенный алгоритм, который постоянно рассчитывает похожие движения исходя из внешних условий, а также модели ног робота. Такой подход позволяет роботам неплохо справляться с передвижением по предсказуемым поверхностям, но не так хорошо работает в сложных условиях. В последние годы немало групп инженеров пошли дальше и стали использовать в роботах алгоритмы машинного обучения, позволяющие роботу самому искать оптимальную походку исходя из знаний о собственном строении, внешнем мире и особенностях взаимодействия с ним. Такой подход, к примеру, недавно позволил четвероногому роботу ANYmal научиться вставать после падений. Но в этой работе, как и в большинстве аналогичных, разработчикам пришлось заранее создать точную модель робота.
Такой подход, к примеру, недавно позволил четвероногому роботу ANYmal научиться вставать после падений. Но в этой работе, как и в большинстве аналогичных, разработчикам пришлось заранее создать точную модель робота.
Инженеры из Университета Южной Калифорнии под руководством Франсиско Валеро-Куэваса (Francisco Valero-Cuevas) показали, что для выучивания оптимальных движений роботу не обязательно иметь модель собственного строения. В качестве демонстратора подхода разработчики выбрали двухсегментную ногу, приводимую в движение с помощью системы из трех тросов, имитирующих сухожилия у животных. Каждый трос присоединен к отдельному электромотору, который при вращении натягивает или наоборот расслабляет его, приводя в движение тот или иной сегмент ноги. Кроме того, на каждом из двух «суставов» ноги расположен датчик, в реальном времени измеряющий угол между сегментами, а также угловые скорость и ускорение. Эти данные — единственное, что получает алгоритм в качестве обратной связи.
Алгоритм, разработанный инженерами, основан на относительно простой трехслойной нейросети. Для того, чтобы нога могла понять свое строение, во время экспериментов отдельный алгоритм создает псевдослучайные команды движения. Эти команды, а также наблюдаемые во время их выполнения данные с датчиков, передаются нейросети, которая создает на их основе модель ноги. С каждым новым движением модель обновляется и нейросеть получает достаточно точное математическое представление ноги робота.
Для того, чтобы нога могла понять свое строение, во время экспериментов отдельный алгоритм создает псевдослучайные команды движения. Эти команды, а также наблюдаемые во время их выполнения данные с датчиков, передаются нейросети, которая создает на их основе модель ноги. С каждым новым движением модель обновляется и нейросеть получает достаточно точное математическое представление ноги робота.
В качестве экспериментальной проверки инженеры решили не создавать полноценного ходячего робота, а поставили более простую задачу. Во время экспериментов нога была закреплена над конвейерной лентой. Задача алгоритма заключалась в том, чтобы продвинуть ленту как можно дальше. Разработчики применили для этой задачи метод обучения с подкреплением, при котором алгоритм получает от среды за каждую попытку награду, соразмерную успешности выполнения задачи. В данном случае инженеры выбрали простую функцию награды, которая представляет собой число, соответствующее расстоянию, на которое переместилась лента. В результате авторы показали, что при использовании такого подхода нога научилась достаточно далеко продвигать ленту.
В результате авторы показали, что при использовании такого подхода нога научилась достаточно далеко продвигать ленту.
Метод обучения с подкреплением часто используется для обучения роботов, причем как в симуляции, так и на реальных устройствах. Показательный пример применения обоих подходов сразу в прошлом году продемонстрировали разработчики из OpenAI. Они создали виртуальную модель роборуки, которой необходимо было научиться вертеть кубик в руке и ориентировать его нужной стороной. Изначально разработчики обучали множество копий виртуальной роборуки, а затем им удалось успешно перенести выученный навык на настоящую роборуку. Во время экспериментов роборука смогла ориентировать кубик нужной стороной до 50 раз подряд, не роняя его.
Григорий Копиев
Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
ЭНЕРГЕТИЧЕСКИЙ АНАЛИЗ БИОИНСПИРИРОВАННОГО МЕХАНИЗМА НОГИ ГАЛОПИРУЮЩЕГО РОБОТА-ГЕПАРДА
2019 ,
ТОМ 19,
НОМЕР 6 (
ноябрь-декабрь )
ISSN 2226-1494 (print), ISSN 2500-0373 (online)
Публикации
2022
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
2008
2007
2006
2005
2004
2003
2002
2001
Главный редактор
НИКИФОРОВ
Владимир Олегович
д.
 т.н., профессор
т.н., профессорПартнеры
doi: 10.17586/2226-1494-2019-19-6-1106-1114
УДК 621.01, 621.837.31
Борисов И.И., Колюбин С.А.
Читать статью полностью
Язык статьи — русский
Ссылка для цитирования:
Борисов И.И., Колюбин С.А. Энергетический анализ биоинспирированного механизма ноги галопирующего робота-гепарда // Научно-технический вестник информационных технологий, механики и оптики. 2019. Т. 19. № 6. С. 1106–1114. doi: 10.17586/2226-1494-2019-19-6-1106-1114
Аннотация
Предмет исследования. Представлены результаты исследования методов проектирования локомоционных роботов на примере создания высокоскоростного, энергоэффективного робота-гепарда, способного перемещаться по пересеченной местности. Рассмотрен энергетический анализ механизма бедра ноги робота, принцип работы которого основан на резонансе гибкого элемента, вызванного автоколебаниями инерционной массы. Разработанная конструкция рассмотрена в виде модели перевернутого пружинного маятника, гибкий элемент которого необходим для обеспечения гармонического поведения тела робота, стабильного взаимодействия с поверхностью пола, поглощения ударной силы и рекуперации энергии перемещения. Метод. При проектировании биоинспирированных робототехнических устройств предложено использовать методы биомиметики, которые заключаются в воспроизведении уникальных качеств и характеристик живых систем, а не только в имитации внешнего вида. Представленная конструкция имитирует динамику ноги прыгающего животного благодаря гармоническому характеру перемещения, вызванного вынужденной периодической силой инерции массы тела робота. Гармоническое усилие, вызывающее автоколебания, выведено с помощью уравнения динамики Лагранжа. Приведено обобщенное описание динамики робота в виде структуры Пуассона, используемой при представлении системы при помощи порт-Гамильтонового подхода.
Рассмотрен энергетический анализ механизма бедра ноги робота, принцип работы которого основан на резонансе гибкого элемента, вызванного автоколебаниями инерционной массы. Разработанная конструкция рассмотрена в виде модели перевернутого пружинного маятника, гибкий элемент которого необходим для обеспечения гармонического поведения тела робота, стабильного взаимодействия с поверхностью пола, поглощения ударной силы и рекуперации энергии перемещения. Метод. При проектировании биоинспирированных робототехнических устройств предложено использовать методы биомиметики, которые заключаются в воспроизведении уникальных качеств и характеристик живых систем, а не только в имитации внешнего вида. Представленная конструкция имитирует динамику ноги прыгающего животного благодаря гармоническому характеру перемещения, вызванного вынужденной периодической силой инерции массы тела робота. Гармоническое усилие, вызывающее автоколебания, выведено с помощью уравнения динамики Лагранжа. Приведено обобщенное описание динамики робота в виде структуры Пуассона, используемой при представлении системы при помощи порт-Гамильтонового подхода.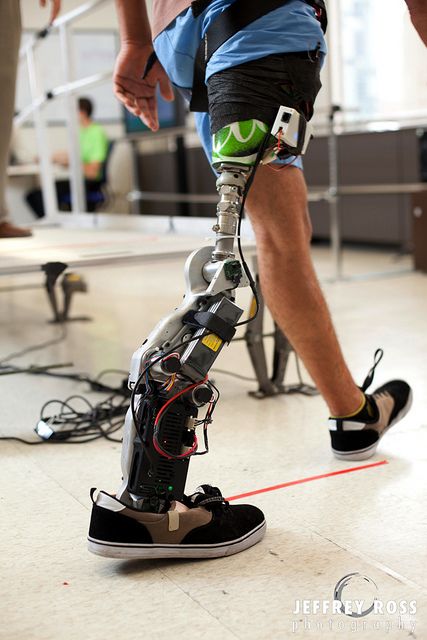 Основные результаты. Получены временные зависимости обмена энергиями и мощностями: для пружинного маятника при наличии и отсутствии внешней возбуждающей силой; механизма бедра, названного «минитаур» при наличии и отсутствии внутренней инерционной силы, вызывающей автоколебания инерционной массы тела робота в режиме прыжка на месте. Представлены графики зависимостей коэффициента затрат энергии на перемещение от конфигурации механизма и жесткости пружины при беге. Практическая значимость. Представленный анализ необходим для определения количества энергии в системе, выявления способов сохранения энергетического бюджета, причин его расходования и способов восполнения.
Основные результаты. Получены временные зависимости обмена энергиями и мощностями: для пружинного маятника при наличии и отсутствии внешней возбуждающей силой; механизма бедра, названного «минитаур» при наличии и отсутствии внутренней инерционной силы, вызывающей автоколебания инерционной массы тела робота в режиме прыжка на месте. Представлены графики зависимостей коэффициента затрат энергии на перемещение от конфигурации механизма и жесткости пружины при беге. Практическая значимость. Представленный анализ необходим для определения количества энергии в системе, выявления способов сохранения энергетического бюджета, причин его расходования и способов восполнения.
Ключевые слова: галопирующий робот, энергетический анализ машин, энергоэффективность
Благодарности. Исследование выполнено за счет гранта Университета ИТМО (проект №418233). Авторы выражают особую благодарность Стефано Страмиджиоли за оказанную помощь в данной работе.
Список литературы
-
Bertram J.E.A., Gutmann A. Motions of the running horse and cheetah revisited: fundamental mechanics of the transverse and rotary gallop // Journal of the Royal Society Interface. 2009. V. 6. N 35. P. 549–559. doi: 10.1098/rsif.2008.0328 -
Wanders I., Folkertsma G.A., Stramigioli S. Design and analysis of an optimal hopper for use in resonance-based locomotion // Proc. IEEE International Conference on Robotics and Automation (ICRA 2015). 2015. P. 5197–5202. doi: 10.1109/ICRA.2015.7139923 -
Sakagami Y., Watanabe R., Aoyama C., Matsunaga S., Higaki N., Fujimura K. The intelligent ASIMO: System overview and integration // Proc. IEEE/RSJ International Conference on Intelligent Robots And Systems. 2002. V. 3. P. 2478–2483. -
Park I.W., Kim J.-Y., Lee J., Oh J.-H. Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO) // Proc. 5th IEEE-RAS International Conference on Humanoid Robots. 2005. P. 321–326. doi: 10.1109/ICHR.2005.1573587
2005. P. 321–326. doi: 10.1109/ICHR.2005.1573587 -
Duindam V., Stramigioli S. Modeling and Control for Efficient Bipedal Walking Robots: A Port-Based Approach. Springer-Verlag Berlin Heidelberg, 2009. 214 p. doi: 10.1007/978-3-540-89918-1 -
Raibert M., Blankespoor K., Nelson G., Playter R. Bigdog, the rough-terrain quadruped robot // IFAC Proceedings Volumes. 2008. V. 41. N 2. P. 10822–10825. doi: 10.3182/20080706-5-KR-1001.01833 -
Seok S., Wang A., Chuah M.Y., Hyun D.J., Lee J., Otten D.M., Lang J.H., Kim S. Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot // IEEE/ASME Transactions on Mechatronics. 2015. V. 20. N 3. P. 1117–1129. doi: 10.1109/TMECH.2014.2339013 -
Cotton S., Olaru I.M.C., Bellman M., Van Der Ven T., Godowski J., Pratt J. FastRunner: A fast, efficient and robust bipedal robot. concept and planar simulation // Proc. IEEE International Conference on Robotics and Automation (ICRA 2012). 2012. P. 2358–2364. doi: 10.1109/ICRA.2012.6225250 -
Folkertsma G.A., Kim S., Stramigioli S. Parallel stiffness in a bounding quadruped with flexible spine // Proc. 25th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012). 2012. P. 2210–2215. doi: 10.1109/IROS.2012.6385870 -
Tedrake R., Zhang T.W., Fong M.-F., Seung H.S. Actuating a simple 3D passive dynamic walker // Proc. IEEE International Conference on Robotics and Automation, ICRA’04. 2004. N 5. P. 4656–4661. -
Folkertsma G.A. Energy-based and biomimetic robotics. University of Twente, 2017. doi: 10.3990/1.9789036543163 -
Folkertsma G.A., van der Schaft A.J., Stramigioli S. Morphological computation in a fast-running quadruped with elastic spine // IFAC-PapersOnLine. 2015. V. 48. N 13. P. 170–175. doi: 10.1016/j.ifacol.2015.10.234 -
Snippe M. Cheetah robot leg mechanism: analysis, design and cost of transport. University of Twente, 2017. -
Kenneally G., De A., Koditschek D.E. Design principles for a family of direct-drive legged robots // IEEE Robotics and Automation Letters. 2016. V. 1. N 2. P. 900–907. doi: 10.1109/LRA.2016.2528294
 2005. P. 321–326. doi: 10.1109/ICHR.2005.1573587
2005. P. 321–326. doi: 10.1109/ICHR.2005.1573587
 2012. P. 2358–2364. doi: 10.1109/ICRA.2012.6225250
2012. P. 2358–2364. doi: 10.1109/ICRA.2012.6225250
 University of Twente, 2017.
University of Twente, 2017.
This work is licensed under a Creative
Commons Attribution-NonCommercial 4.0 International License
Более удобный роботизированный протез ноги

Новый прототип робота-протеза ноги обеспечивает более естественную походку, а также тише и энергоэффективнее, чем другие конструкции.
Ключевым моментом является использование новых небольших и мощных двигателей, изначально разработанных для манипулятора на Международной космической станции. Обтекаемый дизайн предлагает свободно вращающееся колено и рекуперативное торможение, которое заряжает аккумулятор энергией, захваченной, когда ступня касается земли. Эта функция позволяет ноге более чем в два раза увеличить потребность обычного пользователя протеза в ходьбе при одной зарядке в день.
Обтекаемый дизайн предлагает свободно вращающееся колено и рекуперативное торможение, которое заряжает аккумулятор энергией, захваченной, когда ступня касается земли. Эта функция позволяет ноге более чем в два раза увеличить потребность обычного пользователя протеза в ходьбе при одной зарядке в день.
«Наш протез ноги потребляет примерно половину заряда батареи современных роботизированных ног, но может производить больше силы», — сказал Роберт Грегг, адъюнкт-профессор электротехники и вычислительной техники в Мичиганском университете и член UM Robotics Institute, который руководил исследованием в Техасском университете в Далласе. Грегг переехал в UM в прошлом году.
Студент тестирует роботизированную ногу в Техасском университете в Далласе. Мощные двигатели, приводящие в действие колено и лодыжку, могут двигать тело пользователя, позволяя колену свободно вращаться, а рекуперативное торможение продлевает срок службы батареи. Предоставлено: Техасский университет в Далласе.
Используя обычные протезы, люди с ампутированными конечностями должны поднять бедра, чтобы поднять протез стопы с пола и повернуть ногу вперед. Эта неестественная походка требует больше энергии, чем обычная ходьба, вызывает дополнительную нагрузку и боль в бедрах и нижней части спины и в конечном итоге повреждает суставы. Роботизированные ноги потенциально могут обеспечить гораздо более комфортную походку, но одним из их недостатков является скованность в суставах.
Эта неестественная походка требует больше энергии, чем обычная ходьба, вызывает дополнительную нагрузку и боль в бедрах и нижней части спины и в конечном итоге повреждает суставы. Роботизированные ноги потенциально могут обеспечить гораздо более комфортную походку, но одним из их недостатков является скованность в суставах.
«Мы спроектировали наши суставы так, чтобы они были максимально податливыми или гибкими», — сказал Тоби Элери, первый автор исследования и недавний выпускник докторантуры UT Dallas. «Наша роботизированная нога может работать и даже реагировать так же, как человеческий сустав, обеспечивая естественное свободное движение колена и амортизацию при контакте с землей».
Моторы в роботизированных ногах должны вписываться в пространство, которое занимает обычная конечность. В прошлом это означало использование небольших двигателей, которые быстро вращаются, а затем использование ряда шестерен для преобразования быстрого вращения в более мощную силу.
Проблема в том, что шестерни шумные, неэффективные, увеличивают вес и затрудняют свободное вращение суставов. Группа Грегга преодолела это, включив два более мощных двигателя космической станции, один приводил в действие колено, а другой приводил в действие лодыжку.
Группа Грегга преодолела это, включив два более мощных двигателя космической станции, один приводил в действие колено, а другой приводил в действие лодыжку.
Мощные двигатели означают, что требуется меньше передач для создания крутящего момента, такого же сильного, как человеческие ноги, для таких действий, как вставание и подъем по лестнице. С меньшим количеством передач команда Грегга смогла внедрить свободно качающееся колено и рекуперативное торможение, чтобы помочь ноге работать целый день без подзарядки. Предоставлено: Лаборатория локомоторных систем управления, Мичиганский университет.
Использование меньшего количества передач дает множество преимуществ. В дополнение к тому, что колено стало свободно вращаться, удаление шестерен снизило уровень шума с уровня пылесоса до уровня холодильника. Кроме того, рекуперативное торможение поглощает часть удара, когда протез стопы касается земли.
«Если суставы тугоподвижны или ригидны, сила передается на оставшуюся конечность, и это может быть болезненно», — сказал Грегг. «Вместо этого мы используем эту силу для зарядки аккумулятора».
«Вместо этого мы используем эту силу для зарядки аккумулятора».
Люди с ампутированными конечностями, которые испытывают протезы в лаборатории Грегга, сообщают, что они чувствуют ногу, помогающую им отталкиваться от земли во время ходьбы.
«В некоторых случаях они заметили, что мышцы бедер и спины меньше работают с нашей ногой по сравнению с их обычной ногой», — сказал Грегг. «Мы можем уменьшить компенсацию на бедрах».
Следующим шагом команды будет улучшение алгоритмов управления, которые могут помочь ноге автоматически приспосабливаться к разным рельефам, изменениям темпа и переходам между разными видами активности.
Статья под названием «Проектирование и валидация механизированного протеза колена-лодыжки с приводами с высоким крутящим моментом и низким импедансом» опубликована в журнале IEEE Transactions on Robotics.
Исследование финансируется Национальным институтом здравоохранения, Национальным научным фондом и фондом Burroughs Wellcome Fund.
Техасский университет в Далласе и Мичиганский университет совместно добиваются защиты патента. Поскольку Грегг продолжает свою работу в UM, UM Tech Transfer активно ищет коммерческих партнеров, которые помогут вывести технологию на рынок.
O первоначально опубликовано на сайте Michigan Engineering.
- Категория:
передвижение на ногах и экзоскелеты, реабилитационная робототехника и интерфейсы мозг-машина
Что нужно знать перед протезированием ноги
Отзыв:
Протезы ног или протезы могут помочь людям с ногами
ампутации
передвигаться легче. Они имитируют функцию, а иногда даже
вид настоящей ноги. Некоторым людям по-прежнему нужны трость, ходунки или костыли.
ходить с протезом ноги, а другие могут ходить свободно.
Если вам предстоит ампутация нижней конечности или она произойдет в ближайшее время, вам понадобится протез ноги.
вероятно, вариант, о котором вы думаете.
Специалист по реабилитации ампутантов Мэри Кеслер, доктор медицинских наук, делится несколькими соображениями, которые вы должны принять во внимание в первую очередь.
Не всем полезен протез ноги
В то время как многие люди с потерей конечностей хорошо справляются со своими протезами ног,
каждый является хорошим кандидатом на протез ноги. Несколько вопросов, которые вы можете
хотите обсудить с врачом, прежде чем выбрать протез ноги
включают:
- Достаточно ли мягких тканей для амортизации оставшейся кости?
- Сколько тебе боли?
- В каком состоянии кожа на конечности?
- Какой диапазон движений у культи?
- Другая нога здорова?
- Какой у вас был уровень активности до ампутации?
- Каковы ваши цели мобильности?
Тип ампутации (выше или ниже колена) также может повлиять на
решение. Обычно проще использовать протез ноги ниже колена, чем
протез выше колена. «Если коленный сустав цел, протез
нога требует гораздо меньше усилий для движения и обеспечивает большую подвижность», — объясняет
Кеслер.
Причина ампутации также является фактором, поскольку она может повлиять на
здоровье культи. Ваше физическое здоровье и образ жизни также
важно учитывать. Если вы были малоактивны и потеряли ногу из-за
заболевание периферических сосудов
или же
диабета, например, вам будет труднее с протезом, чем тому, кто
был чрезвычайно активен, но потерял конечность в автокатастрофе.
Когда дело доходит до ампутации, каждый человек уникален. Решение о переезде
вперед с протезом должен быть совместным между вами и
ваш врач.
Чтобы получить правильный тип и подгонку, важно тесно сотрудничать со своим протезистом — отношения, которые у вас могут быть на всю жизнь.
Мэри Кеслер, доктор медицины
Протезы ног не подходят всем
Если ваш врач прописывает протез ноги, вы можете не знать, куда
начинать. Помогает понять, как работают разные части протеза.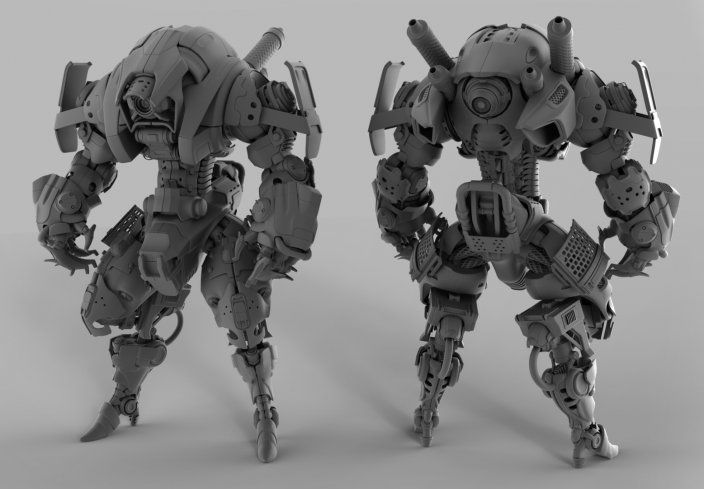
вместе:
- Сам протез ноги
выполнен из легких, но прочных материалов. В зависимости от местоположения
ампутации нога может иметь или не иметь функциональное колено и
голеностопные суставы. - Розетка
представляет собой точную модель культи, которая плотно прилегает к конечности.
Он помогает прикрепить протез ноги к телу. - Система подвески
как протез остается прикрепленным, будь то присасывание рукава,
вакуумная подвеска/аспирация или дистальная фиксация штифтом или ремешком.
Существует множество вариантов для каждого из вышеперечисленных компонентов, каждый с
свои плюсы и минусы. «Чтобы получить правильный тип и посадку, важно
работать в тесном контакте со своим протезистом — отношения, которые вы могли бы иметь для
жизнь», — рекомендует Кеслер.
А
протезист
является медицинским работником, который специализируется на протезах конечностей и может
поможет подобрать нужные компоненты. У вас будут частые встречи,
У вас будут частые встречи,
особенно в начале, поэтому важно чувствовать себя комфортно с
протезист вы выбираете.
Реабилитация — это непрерывный совместный процесс
После того, как вы выбрали компоненты протеза ноги, вам потребуются:
реабилитации для укрепления ног, рук и сердечно-сосудистой системы, а также
вы учитесь ходить с новой конечностью. Вы будете тесно сотрудничать с
врачи-реабилитологи, физиотерапевты и эрготерапевты
разработать план реабилитации на основе ваших целей в области мобильности. Большая часть
этого плана состоит в том, чтобы держать вашу здоровую ногу в хорошей форме. «Ваша здоровая нога
на вес золота», — подчеркивает Кеслер. «При протезировании
технологии постоянно развиваются, ничто не может повторить здоровую ногу».
Комплексная программа реабилитации ампутантов Джона Хопкинса
При восстановлении после ампутации конечности необходима поддержка специальной группы экспертов. В Johns Hopkins наша команда физиотерапевтов, ортопедов, протезистов, физиотерапевтов и эрготерапевтов, реабилитационных психологов и других специалистов работает вместе, чтобы создать ваш индивидуальный план реабилитации.
В Johns Hopkins наша команда физиотерапевтов, ортопедов, протезистов, физиотерапевтов и эрготерапевтов, реабилитационных психологов и других специалистов работает вместе, чтобы создать ваш индивидуальный план реабилитации.
Узнайте больше о нашей программе реабилитации людей с ампутированными конечностями
Привыкнуть к протезу ноги непросто
Научиться передвигаться с протезом ноги может быть проблемой. Даже после
первоначальная реабилитация закончена, у вас могут возникнуть некоторые проблемы, которые
протезист и реабилитационная команда могут помочь вам справиться. Общие препятствия
включают:
- Чрезмерная потливость
(гипергидроз), который может повлиять на прилегание протеза и привести к проблемам с кожей. - Изменение формы культи . Обычно это происходит в первый год после ампутации.
ткань оседает в свою более постоянную форму и может повлиять на посадку
розетка. - Слабость в культе,
что может затруднить использование протеза в течение длительного времени.
время. - Фантомная боль в конечностях
может быть достаточно интенсивным, чтобы повлиять на вашу способность пользоваться протезом.

Примечание о фантомной боли в конечностях
Фантомная боль в конечности или боль, которая, как кажется, исходит от ампутированной конечности.
вполне реальная проблема, с которой вы можете столкнуться после ампутации. «Около 80%
люди с ампутациями испытывают фантомные боли в конечностях, которые не имеют четкого
причиной, хотя боль в конечности перед ампутацией может быть фактором риска».
говорит Кеслер.
Зеркальная терапия , при которой вы выполняете упражнения с зеркалом, может помочь при определенных типах
фантомные боли в конечностях. «Глядя на себя в зеркало, вы имитируете
присутствие ампутированной ноги, заставляющее мозг думать, что она все еще
там, останавливая боль», — объясняет Кеслер.
В других случаях фантомная боль в конечностях может быть вызвана другим заболеванием.
затрагивающие культю, такие как
радикулит
или неврома. Устранение этих основных причин может помочь устранить фантомную
боль.
Ваши потребности в протезах ног могут измениться
В какой-то момент вы можете заметить, что не так функциональны, как хотелось бы
быть с вашим нынешним протезом ноги. Может быть, ваша остаточная конечность
стабилизированы, и вы готовы перейти от временного протеза, который
длится от нескольких месяцев до одного, который может длиться от трех до пяти лет. Или, может быть
вы «опередили» свой протез, двигаясь больше или иначе, чем
протез предназначен для. Возникают новые боли, дискомфорт и отсутствие стабильности.
некоторые из признаков того, что, возможно, пора обратиться к вашему протезисту, чтобы
переоцените свои потребности.
Ваш протезист может порекомендовать отрегулировать ваше текущее оборудование или
замена одного из компонентов. Или вы можете получить рецепт на новый
протез ноги, что происходит в среднем раз в три-пять лет. если ты
если ты
получать новые компоненты, важно не торопиться, чтобы понять, как
они работают. Физиотерапия может помочь приспособиться к новым компонентам или вашим
новый протез ноги.
Технология протезов ног постоянно развивается
Всегда есть новые разработки в технологии протезирования конечностей, такие как
управляемые микропроцессором и специфичные для деятельности компоненты.
- Микропроцессорные разъемы
оснащены компьютерными чипами и датчиками для обеспечения более естественной походки. Они
может даже иметь разные режимы для ходьбы по ровным поверхностям или вверх и вниз
вниз по лестнице. - Существуют также специализированные протезы ног для различных видов деятельности , таких как бег,
душ или плавание, на которые вы можете переключиться по мере необходимости. В некоторых случаях,
Ваш повседневный протез ноги может быть изменен вашим протезистом, чтобы служить
разные цели.