Содержание
Роботизированная рука | Rozum Robotics
PULSE — это 6-осевой коллаборативный робот-манипулятор. Подходит для автоматизации любых повторяющихся операций. Применяется на производствах, в сфере услуг и развлечений, в лабораториях и университетах.
Описание
PULSE — это линейка роботов-манипуляторов для автоматизации производственных процессов, а также для использования в исследовательских, образовательных проектах и в сфере развлечений.
Роботы-манипуляторы идеальны для автоматизации повторяющихся задач с незначительными изменениями параметров процесса, таких как: упаковка и складирование, загрузка/разгрузка станков с ЧПУ, нанесение герметика, работа на конвейере, приготовление кофе и коктейлей и пр.
PULSE имеет модульную конструкцию и шесть степеней свободы. На практике это означает, что с помощью PULSE вы можете автоматизировать 95% всех производственных задач. Робот построен на базе серводвигателей нашего собственного производства.
Мы оснащаем робота универсальный фланцем международного стандарта ISO 9409-1-50-4-M6. Это значит, что для перепрофилирования робота вам достаточно установить на PULSE любой другой захватный механизм: для работы со сварочным оборудованием, лазерными инструментами, видеокамерами, кофейным оборудованием и т.д.
Это значит, что для перепрофилирования робота вам достаточно установить на PULSE любой другой захватный механизм: для работы со сварочным оборудованием, лазерными инструментами, видеокамерами, кофейным оборудованием и т.д.
Роботизированная рука манипулятор PULSE безопасна, не требуют установки дорогостоящего защитного ограждения и может работать в прямом контакте с человеком.
Роботов PULSE можно программировать в режиме ручного обучения. Это делает установку, настройку и отладку робота быстрой и простой даже для пользователя, не имеющего опыта программирования. А для максимального контроля продвинутые пользователи могут использовать возможности API (Java, Python).
Комплект поставки
- 1x Робот манипулятор PULSE
- 1x Блок управления
- 1x Комплект соединительных кабелей
- 1x Монтажные элементы
- 1x Сертификат EC/TC
ROI-калькулятор
Модели коллаборативного робота PULSE
| Модель | PULSE 75 | PULSE 90 |
|---|---|---|
| Максимальная полезная нагрузка | 6 кг | 4 кг |
| Рабочий радиус | 750 мм | 900 мм |
| Количество степеней свободы | 6 | 6 |
| Повторяемость | +/- 0,1 мм | +/- 0,1 мм |
| Условия эксплуатации | 0. ..35 °C ..35 °C | 0…35 °C |
| Вес робота | 12.6 кг | 13.6 кг |
| Время ускорения | 2 м/с | 2 м/с |
| Фланец захватного устройства | ISO 9409-1-50-4-M6 | ISO 9409-1-50-4-M6 |
| Основание | 120 мм | 120 мм |
| Интерфейсы | Веб-интерфейс. Любое устройство | Веб-интерфейс. Любое устройство |
| Программирование | Ручное управление. REST API. UI | Ручное управление. REST API. UI |
| Гарантия | 1 год | 1 год |
| Цена для дистрибьютора: | По запросу | По запросу |
| ROI и период окупаемости | Посчитать | Посчитать |
Применение
Pick & Place
Станки с ЧПУ
Покраска
Сварка
Склейка
Контроль качества
Полировка
Pick and Place
Рутинная работа, связанная с загрузкой, выгрузкой, перемещением объектов, — это подходящая работа для коллаборативного робота. PULSE легко справится с такого рода задачами, демонстрируя при этом неизменную точность и производительность 24/7.
PULSE легко справится с такого рода задачами, демонстрируя при этом неизменную точность и производительность 24/7.
Роботы-манипуляторы PULSE с первой минуты работы повысят производительность и решат проблемы качества на вашем производстве. Компактный дизайн позволяет интегрировать коботов в уже существующие схемы производства с минимальными изменениями.
Благодаря стандартам коллаборативности PULSE разрешено использовать для непосредственной работы рядом и вместе с людьми.
Станки с ЧПУ
Используйте PULSE для обслуживания станков с ЧПУ. Это поможет оптимизировать рабочие циклы, сократит время простоя дорогостоящего оборудования и повысит общую производительность. А в то время как коботы обслуживают станки, ваш персонал сможет управлять другими, технически более сложными процессами. Это даст значительную выгоду, особенно в рамках мелкосерийного производства.
Благодаря интуитивно понятному интерфейсу и функции ручного управления операторы, обладающие даже базовыми навыками работы на компьютере, в течение 30 минут смогут перепрограммировать робот-манипулятор PULSE для выполнения других операций. PULSE можно легко перемещать от станка к станку, поскольку кобот отличается легким весом и прост в установке.
PULSE можно легко перемещать от станка к станку, поскольку кобот отличается легким весом и прост в установке.
Покраска
Использование робота PULSE для покраски или распыления улучшает качество покрытия, повышает скорость работы и производительность. Коботы максимально точны при нанесении краски и других материалов, изъяны и расход краски сводятся к минимуму. Экономия материалов составляет 20-30%.
Покрасочные работы небезопасны для здоровья человека, но вы можете снизить связанные с этим риски и расходы с помощью робота-манипулятора. Линейка роботов PULSE имеет 6 степеней свободы и большой радиус действия, который обеспечивает полное покрытие и отличный результат.
Литье под давлением
На участках литья под давлением PULSE помогает в загрузке и разгрузке машин. Кроме того, робота можно задействовать на вторичных операциях, таких как обрезка отливок.
Манипулятор PULSE — это надежный оператор литьевых машин. Благодаря компактному и и универсальному дизайну, наши коботы могут быть адаптированы к самым разнообразным условиям и задачам производства. Перемещение и перенастройка манипулятора для выполнения другой операции займет у вас всего несколько часов.
Перемещение и перенастройка манипулятора для выполнения другой операции займет у вас всего несколько часов.
Лабораторное тестирование
Ключевые преимущества PULSE для лабораторных тестов — это высокая повторяемость и точность движения робота. PULSE воспроизводит заданную траекторию с максимально возможным отклонением в 0,1 мм. Робот обеспечивает надежность и гарантирует объективный результат ваших тестов.
Для программирования роботов-манипуляторов PULSE можно использовать упрощенный интерфейс, понятный даже для специалистов без знания и опыта в программировании. Также доступен расширенный API-функционал для профессионального программирования более сложных задач.
Вы полностью контролируете то, что делает ваш робот. Если ваши тесты связаны с контактом с вредными и опасными для здоровья веществами, вы можете передать эту задачу коботу PULSE. Все риски он возьмет на свои металлические плечи.
Сварочные работы
Сварка требует от особой осторожности и внимательности. Ошибки в этой работе стоят не столько денег, сколько здоровья и даже жизни людей. Роботы-манипуляторы PULSE не теряют концентрации от задачи к задаче 24/7, что позволяет минимизировать риски, дефекты и брак изделий.
Ошибки в этой работе стоят не столько денег, сколько здоровья и даже жизни людей. Роботы-манипуляторы PULSE не теряют концентрации от задачи к задаче 24/7, что позволяет минимизировать риски, дефекты и брак изделий.
Точечная, дуговая или ультразвуковая сварка — вы можете выполнять с помощью робота PULSE любые сварные швы. Ваши операторы при этом смогут выполнять менее опасную, но при этом крайне важную работу — контроль качества изделий или переналадку робота. Гибкость в установке и высокая повторяемость движений наших коботов гарантируют минимальное время простоя, неизменно высокое качество изделий и снижение затрат.
Склеивание
Равномерное нанесение клея и применение одинаковой силы имеют решающее значение для конечного результата. Благодаря высокой точности и повторяемости, робот-манипулятор PULSE равномерно наносит клей на поверхность и эффективно использует расходные материалы. Это позволяет снизить затраты и повысить качество продукции с первого дня использования кобота PULSE.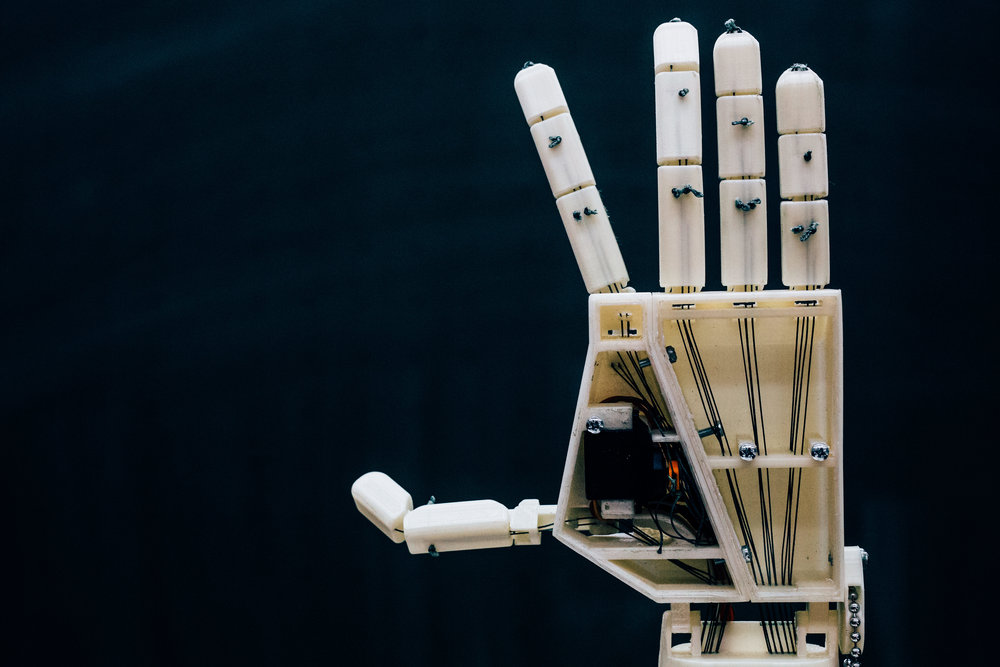
Работа по склейке сопряжена со значительными рисками для здоровья. Коботов можно и нужно задействовать на опасных производствах в работе с вредными веществами.
Контроль качества
В процессах, где качество и надежность готовых продуктов имеют решающее значение, человеческая ошибка или невнимательность может стоить вашему бизнесу огромных потерь. Речь идет не только о деньгах, но и о деловой репутации, восстановить которую гораздо сложнее. Использование коллаборативных роботов на ключевых этапах проверки изделий — это решение, которое гарантирует вам качественный и постоянный контроль продукции.
PULSE можно интегрировать в ваш процесс тестирования в кратчайшие сроки с минимальными затратами и усилиями. Для работы с роботами не требуется нанимать специально обученный персонал. С управлением и переустановкой PULSE справится ваш обычный инспектор или оператор. Роботы-манипуляторы PULSE скрупулезно выполняют свою работу — они не отвлекаются и бдительно следят за качеством продукции 24/7.
Полировка
Полировка — это тяжелый труд, который требует постоянных физических усилий. Кроме того, выполнение этой операции в течение долгого времени влечет за собой риск получения травм и развития хронических болезней.
Коллаборативный робот PULSE выполняет такие задачи с постоянной воспроизводимостью и высокой точностью. Робот с улучшенными функциями измерения силы значительно повышает качество и производительность при выполнении отделочных работ.
Особенности
Решения
RozumLab
Учебная ячейка с роботом
RozumLab – это готовое решение по практическому обучению робототехнике. RozumLab представляет собой мобильную ячейку с установленным на ней роботом PULSE, конвейерной лентой и системой захватов. Оборудование и готовая программа лабораторных работ RozumLab охватывают 90% реальных производственных задач на базе роботов. Изучайте робототехнику эффективно и на практике!
Узнать больше
Робот-оператор ЧПУ
Автоматическая загрузка и разгрузка станков с ЧПУ
Автоматизируйте загрузку и разгрузку ваших станков с помощью робота PULSE. Робот-оператор увеличивает производительность, минимизирует количество брака готовых изделий, а также исключает опасность производственных травм, связанных с загрузкой горячих, острых или тяжелых деталей.
Робот-оператор увеличивает производительность, минимизирует количество брака готовых изделий, а также исключает опасность производственных травм, связанных с загрузкой горячих, острых или тяжелых деталей.
Узнать больше
Сферы применения
Автомобильная промышленность
Бытовая электроника
Пищевая промышленность
Машиностроение
Медицина
Военная, оборонная и аэрокосмическая промышленность
Упаковочная промышленность
Производство ПВХ
Университеты
Вам нужен PULSE?
1
Отправьте заявку
Оставьте онлайн-запрос, отправьте e-mail или позвоните нам. Мы изучим ваш запрос, проработаем модель интеграции робота в ваш бизнес и предоставим подробные условия и сроки поставки.
2
Оплатите заказ
Мы выставляем счет на основе согласованных условий, и вы оплачиваете его — вот и все, что требуется. При необходимости наши менеджеры помогут вам на каждом этапе выбора модели робота.

3
Ожидайте доставку
Время доставки PULSE с момента оплаты составляет до шести недель. Мы доставим робота прямо к вашей двери! Где бы она ни находилась.
4
Робот ваш!
На всю продукцию предоставляется 1 год гарантии. Каждый наш клиент по запросу получает персонализированную техническую поддержку в режиме реального времени.

Документация
- PULSE 75
Спецификация
.pdf
Краткая инструкция по началу работы с PULSE
.pdf
Руководство пользователя
.pdf
3D Модель
.step
Руководство по применению REST API
.pdf
Размерный чертеж
.pdf
Исходный код Rest API Python
link
- PULSE 90
Спецификация
.pdf
Краткая инструкция по началу работы с PULSE
.pdf
Руководство пользователя
.pdf
Руководство по применению REST API
.pdf
Исходный код Rest API Python
link
3D Модель
.
step
 step
stepСтатья — роботизированная рука манипулятор
Рука манипулятор для человекоподобного робота RKP-Rh201-3D позволяет производить захват предметов по принципу пятипалой человеческой руки с дальнейшим их удержанием, перемещением в пространстве относительно любой плоскости или переносом.
Также возможно использование сжатого в кулак манипулятора RKP-Rh201-3D для динамического воздействия на внезапно возникшее впереди или сбоку препятствие или на соперника в боях роботов.
Роботом называют автоматическое устройство, имеющее манипулятор — механический аналог человеческой руки — и систему управления этим манипулятором. Обе эти составные части могут иметь различное устройство — от очень простого до чрезвычайно сложного.
Манипулятор обычно состоит из шарнирно соединенных звеньев, как рука человека состоит из костей, связанных суставами, и заканчивается охватом, который является чем-то вроде кисти человеческой руки. Роль связок в кисти манипуляторе выполняют специальные связки из нейлона. Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Таким образом, возможно через эти нейлоновые связки сжимать и разжимать кисть для захвата любого предмета, который в нее помещается.
Вид тыльной стороны ладони человекоподобного робота RKP-Rh201-3D. В пальцах хорошо видны нейлоновые сухожилия (смотри Рис. 1).
Перемещение звеньев манипулятора обеспечивают так называемые приводы или сервомеханизмы (сокращенно серво) — аналоги мускулов в руке человека.
Обычно в качестве таковых используются сервоприводы, которые включают в себя: редуктор (систему зубчатых передач для снижения числа оборотов электродвигателя серво и для увеличения вращающего момента) и электрическую схему управления серво, регулирующую направление и скорость вращения электродвигателя.
В роботизированной руке RKP-Rh201-3D установлен один серводвигатель большой мощности для того, чтобы быстро сжимать и разжимать всю кисть робота (все пять пальцев манипулятора в виде руки). Это хорошо применимо в боевых роботах для нанесения различных ударов, но также возможна компоновка кисти руки робота, при которой каждым пальцем будет управлять отдельный сервопривод весом 9 грамм, например, рулевая машинка TowerPro 9 Gram SG90.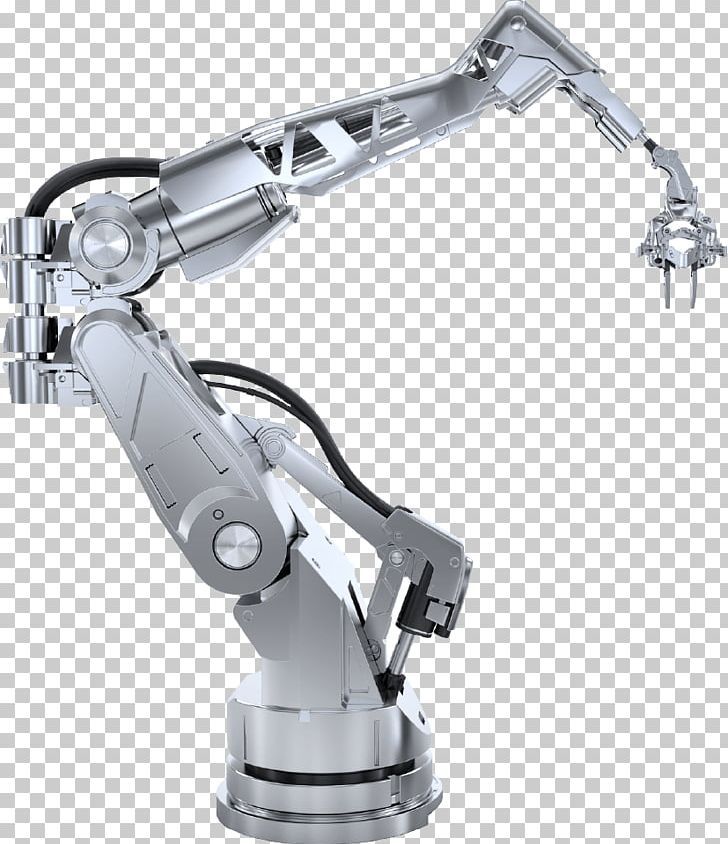
Вид на внутреннюю часть ладони человекоподобного робота RKP-Rh201-3D. Ладонь кисти человекоподобного робота зажата на 50%. (смотри Рис. 2).
В таком случае возможны сложные движения кисти человекоподобного робота, но программирование при этом становится более сложным, интересным и захватывающим. При этом на каждом из пальцев кисти руки человекоподобного робота возможна установка дополнительных разнообразных датчиков и сенсоров, управляющих различными процессами.
Таково в общих чертах устройство манипулятора RKP-Rh201-3D. Что касается сложности задач, которые может разрешать тот или иной робот, оборудованный различными манипуляторами, заменяющими ему руки, то они во многом зависят от сложности и совершенства управляющего устройства.
Принято говорить о трех поколениях роботов: промышленных, адаптивных и роботах с искусственным интеллектом. Но какой бы робот не проектировался ему не обойтись без рук манипуляторов для выполнения различных задач. Звенья манипулятора подвижны друг относительно друга и могут совершать вращательные и поступательные движения.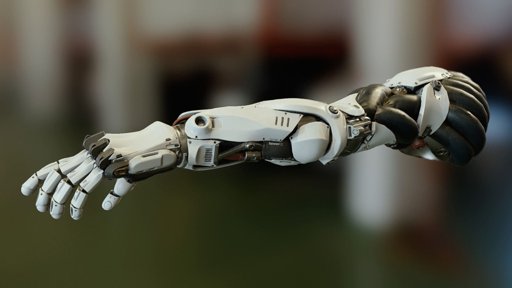 Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Иногда вместо простого захвата предмета у промышленных роботов последним звеном манипулятора (его кистью) служит какой-нибудь рабочий инструмент, например, дрель, гаечный ключ, краскораспылитель или сварочная горелка. У человекоподобных роботов на кончиках пальцев их манипуляторов в виде кисти могут быть также расположены различные дополнительные миниатюрные приспособления, например, для сверления, гравировки или рисования.
Общий вид человекоподобного боевого робота на сервоприводах с кистями рук RKP-Rh201-3D (смотри Рис. 3).
Robotic Arms
Главная > Robotic Arms
Манипуляторы Interbotix серии X предназначены для обучения и исследований с поддержкой ROS + ROS2 (Melodic, Noetic и Galactic), Moveit, Gazebo и MATLAB®, а также демо и обучающие видеоролики, которые помогут вам начать работу с вашей платформой менее чем за час. Серия X предлагает на выбор множество различных моделей с вариантами 4, 5 и 6 степеней свободы и полезной нагрузкой от 50 до 750 г.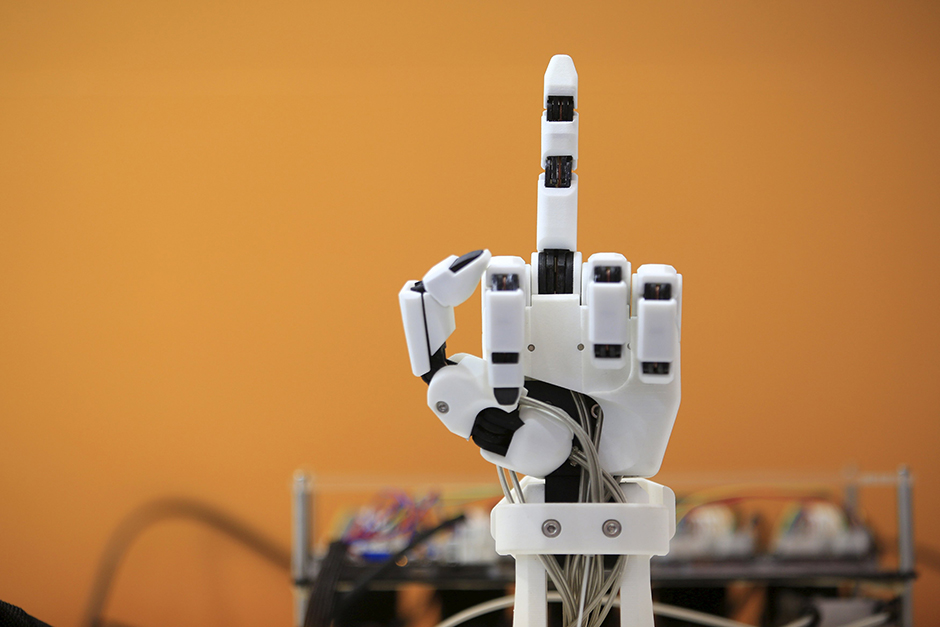 Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Все руки серии X работают в одном и том же центральном репозитории с открытым исходным кодом. Эти платформы идеально подходят для использования в классе и для таких приложений, как выбор и размещение на основе технического зрения, машинное обучение и искусственный интеллект.
Робот-манипулятор ViperX 300, 6 степеней свободы
Цена: $5 695,95
Робот-манипулятор ViperX 300
Цена: 4895,95 долларов США
Робот-манипулятор ViperX 250
Цена: 4 295,95 долларов США
Робот-манипулятор WidowX 250, 6 степеней свободы
Цена: 3295,95 долларов США
Робот-манипулятор WidowX 250
Цена: 2895,95 долларов США
Рука робота WidowX 200
Цена: 2595,95 долларов США
Робот-манипулятор ReactorX 200
Цена: 1949,95 долларов США
Робот-манипулятор ReactorX 150
Цена: 1549,95 долларов США
Робот-манипулятор PincherX 150
Цена: $1049,95
Рука робота PincherX 100
Цена: $649,95
Мобильный робот-манипулятор WidowX 250, 6 степеней свободы
Цена: $3249,95
RPI4 / PS4 Bluetooth Control Set (ROS)
Цена: $199,95
Interbotix ROS Arm Vision Kit
Цена: $379,95
Серия высокоточных 6-осевых коботов DOBOT CR с полезной нагрузкой до 16 кг.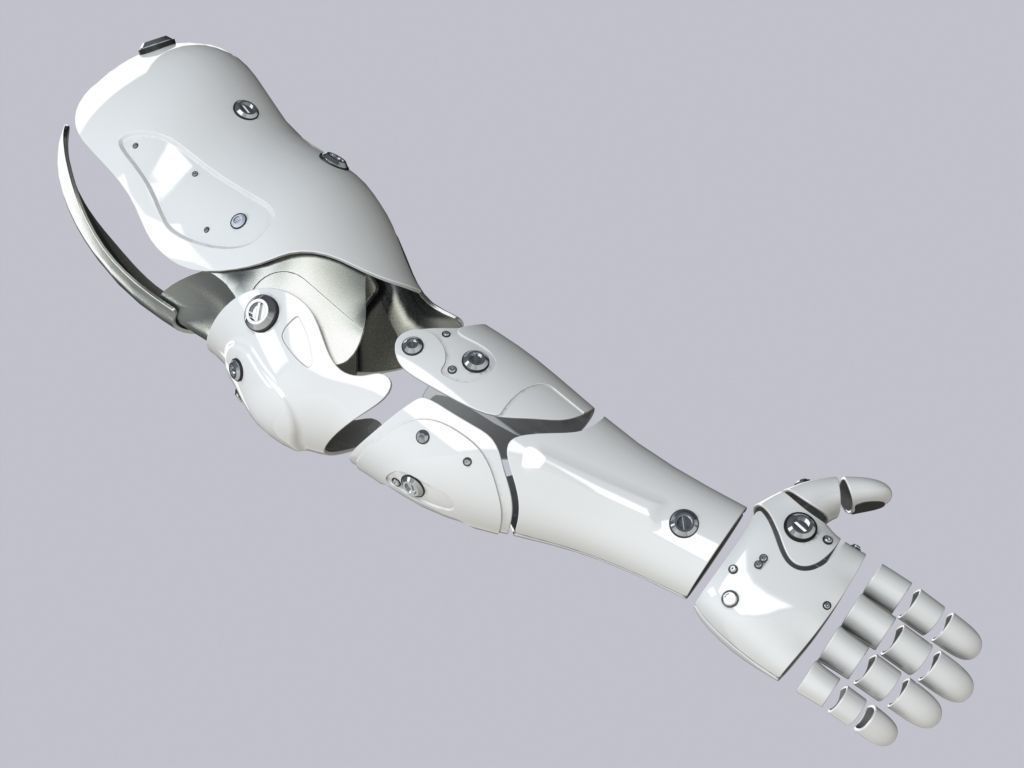
идеальный
для сред, где люди находятся поблизости, со встроенным обнаружением и предотвращением столкновений. Серия CR это
также предназначен для гораздо более простого развертывания. Физически позируйте и фиксируйте движения одним прикосновением
кнопку и записывать последовательности движений без каких-либо знаний в области программирования. Потенциал для многих различных
конечные эффекты делают серию CR универсальной платформой автоматизации. Интерфейсы визуального программирования также делают
Настройка автоматизации доступна для тех, у кого нет опыта программирования.
Коллаборативный робот DOBOT CR серии CR3
Цена: $19 990,00
Коллаборативный робот DOBOT CR серии CR5
Цена: $22 990,00
Коллаборативный робот DOBOT CR серии CR10
Цена: $31 990,00
Коллаборативный робот DOBOT CR серии CR16
Цена: $34 990,00
Промышленный настольный робот DOBOT MG400
Цена: $2,699.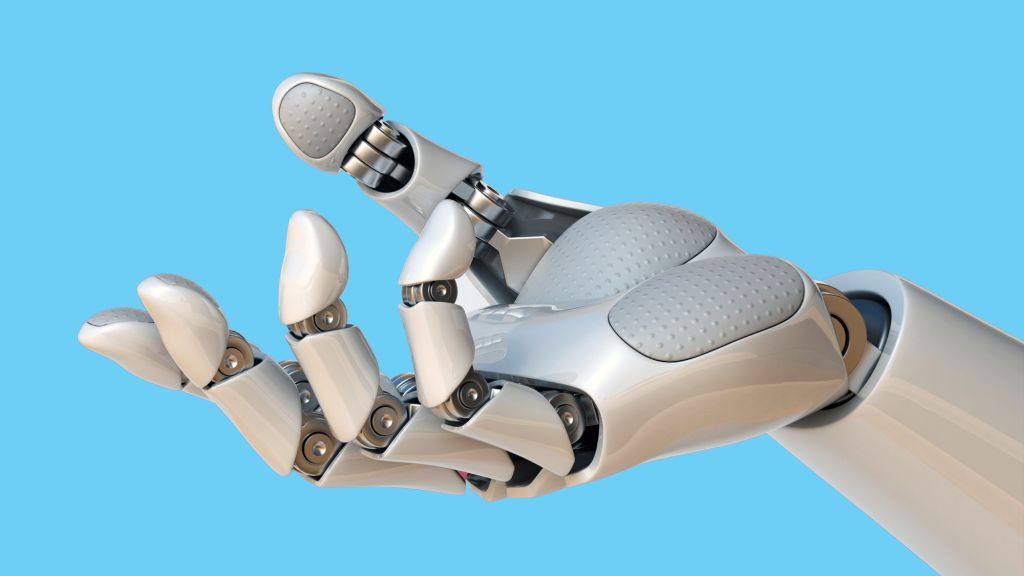 00
00
Захваты и концевые рабочие органы, предназначенные для работы с новейшими коботами, представленными на рынке, отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте опций. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долларов США
Захват для пальцев RG6
Цена: $5945,00
Захват пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: 4 201,00 долл.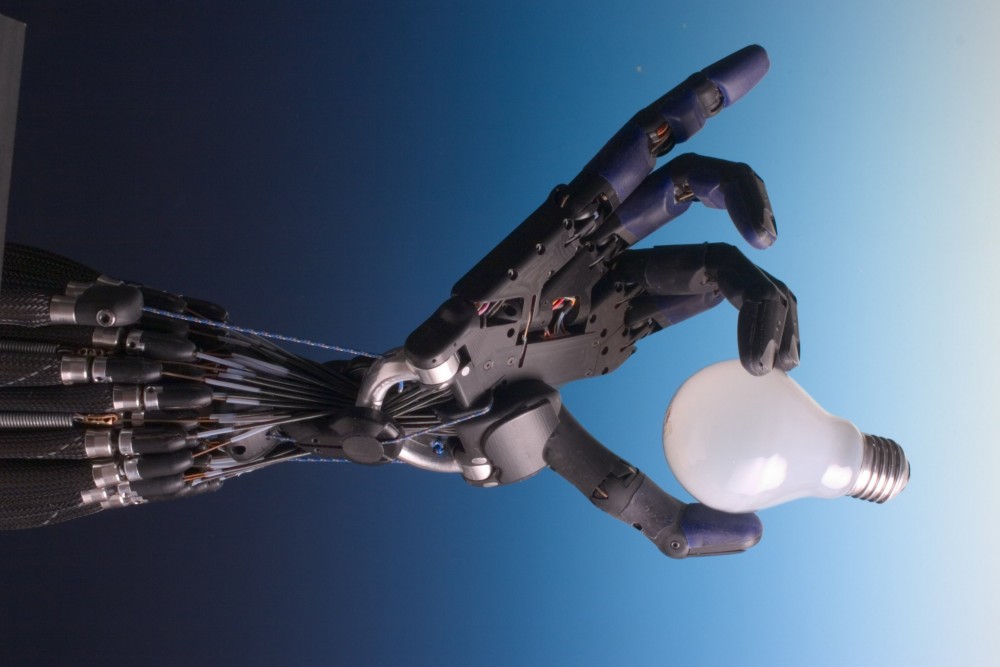 США
США
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Gecko Single Pad Gripper
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $945,00
OnRobot Eyes
Цена: $6 519,00
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $1138,00
Устройство двойной быстрой замены
Цена: 2 522,00 долл. США
США
Адаптивный параллельный захват AG-145
Цена: 4099,95 долларов США
Адаптивный параллельный захват AG-95
Цена: $3899,95
Параллельный захват PGC 140 для совместной работы
Цена: 2 599,95 долл. США
Параллельный захват для совместной работы PGC 300
Цена: 3 299,95 долл. США
Параллельный захват для совместной работы PGC 50
Цена: 2399,95 долларов США
PGE-15 Тонкий параллельный захват
Цена: $849,95
Тонкий параллельный захват PGE-5
Цена: $849,95
Тонкий параллельный захват PGE-50
Цена: $849,95
Тонкий параллельный захват PGE-8
Цена: $849,95
Роторный захват для коботов RGI-14
Цена: 2349,95 долларов США
Роторный захват для коботов RGI-30
Цена: 2 499,95 долларов США
Конечные эффекторы и захваты для коботов
Главная > Роботы-манипуляторы > Промышленные рабочие органы
Захваты и рабочие органы, предназначенные для работы с новейшими коботами, представленными на рынке, отличаются высокой точностью с точностью до миллиметра и доступны в широком ассортименте вариантов. Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Стандартные протоколы включают Modbus, RTU (RS485), цифровой ввод/вывод, TCP/IP, USB 2.0, CAN 2.0, PROFINET и EtherCAT. Если вы ищете что-то более индивидуальное, сообщите нам об этом, и мы поможем найти подходящий конечный эффектор для вашего проекта.
Захват для пальцев RG2
Цена: 4 963,00 долл. США
Захват для пальцев RG6
Цена: $5945,00
Захват для пальцев RG2-FT
Цена: $10 317,00
2FG7 Захват для пальцев
Цена: $4 201,00
2FGP20 Захват паллетизатора
Цена: $11 589,00
Магнитный захват MG10
Цена: $2780,00
Односторонний захват Gecko
Цена: $773,00
3FG15 Захват для пальцев
Цена: $5 231,00
Вакуумный захват VG10
Цена: $5 462,00
Вакуумный захват VGC10
Цена: $3 364,00
Вакуумный захват VGP20
Цена: $6009,00
Мягкий захват
Цена: $945,00
OnRobot Eyes
Цена: 6 519,00 долларов США
Отвертка OnRobot
Цена: $7753,00
OnRobot Sander
Цена: $3557,00
Роботизированный лифт LIFT100
Цена: $14 663,00
Устройство быстрой смены
Цена: $1138,00
Двойной быстросменный блок
Цена: 2 522,00 долл.