Содержание
Бионические протезы в наше время
Позвонить
+7 (900) 029-50-10 ДЮТТ
+7 (904) 808-60-10 Кванториум Челябинск
+7 (3519) 33-07-37 Кванториум Магнитогорск
+7 (351) 369-08-13 Кванториум Златоуст
+7 (35163) 2-45-85 Кванториум Троицк
+7 (35134) 4-22-81 IT-Куб Южноуральск
+7 951 806 3486 IT-Куб Сатка
+7 (3519) 33-08-08 IT-Куб Магнитогорск
+7 951-787-67-82 IT-Куб Кыштым
+7 (35146) 92 716 IT-Куб Снежинск
+7 9000 670 186 IT-Куб Миасс
+7 (351) 218-11-16 IT-Куб Челябинск
Часто задаваемые вопросы
- Родителям и детям
- Роботы
- Техническое творчество
- Программирование
- IT
06.04.2020
В современном обществе ежегодно проводится более одного миллиона ампутаций конечностей из-за аварий, войн, сердечно-сосудистых заболеваний, опухолей или врожденных патологий. Сегодня Андрей Захлебин, наш педагог дополнительного образования, расскажет, чем может в этих случаях помочь робототехника.
Сегодня Андрей Захлебин, наш педагог дополнительного образования, расскажет, чем может в этих случаях помочь робототехника.
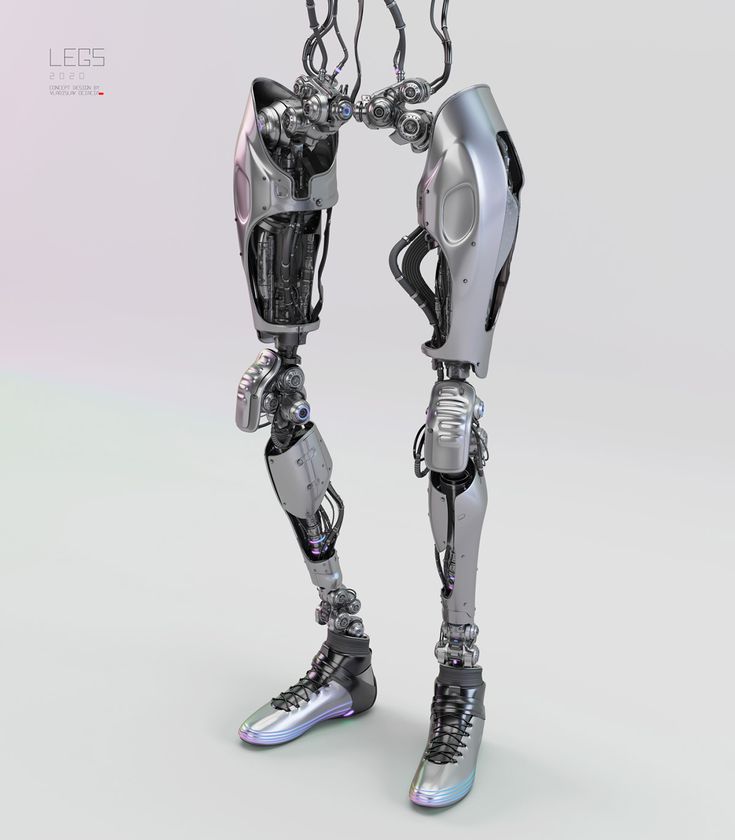
— Роботизированный протез конечности — хорошо налаженная область исследования, которая объединяет передовые науки, такие, как: мехатроника, программирование. Интеллектуальное считывание сигналов необходимо для достижения более высокой точности положения протеза в пространстве. При этом протез сохраняет физический внешний вид ампутированного органа.
Роботизированные протезы необходимы, чтобы заменить отсутствующие конечности. Их задача — восстанавливать утраченные функции и обеспечивать эстетичный внешний вид. Основными аспектами являются усиление социального взаимодействие в обществе и продуктивная работа человека с ампутированной конечностью.
С развитием сенсорных технологий в последние несколько десятилетий был сделан значительный скачок в этой области. Большая часть работы все еще находится на стадии исследования, и в ближайшие годы ожидается дальнейшая научно-исследовательская работ. Конечной целью является создание устройства, которое может генерировать движения, подобные человеческим.
Конечной целью является создание устройства, которое может генерировать движения, подобные человеческим.
Если подводить итоги, то можно выделить несколько видов протезов, которые отличаются друг от друга. Чтобы восстановить простые и элементарные функциональные способности руки, нужно применить рабочую модель верхней конечности. Для преодоления сложных движений чаще всего используют активный функциональный протез. Подобные механизмы являются довольно сложными и стоят дороже.
Данные протезы работают по принципу: когда человек с ампутацией хочет пошевелить конечностью, мозг генерирует соответствующие сигналы, необходимые для управления мышцами, которые передаются по нервам. Так как отсутствует «приемник», сигнал уходит в никуда. Поэтому стала задача перехватить эти сигналы для дальнейшего управления протезом. Но есть ряд проблем.
В американском Хьюстонском университете проводили эксперименты со снятием моторных нервных сигналов методом электроэнцефалографии и с помощью электродов, установленных на голове. Сложность электроэнцефалографии в том, что при снятии всех сигналов необходимо найти нужный для управления ампутированной конечностью.
Сложность электроэнцефалографии в том, что при снятии всех сигналов необходимо найти нужный для управления ампутированной конечностью.
К бионическим вариантам протезов принято относить приспособления, работающие от внешнего источника энергии. Функционирует протез руки от сигнала, который возникает при сократительной функции мышцы.
Готовность один день: 6 апреля «Кванториум» занимается онлайн!
Когда жизнь бьет ключом. В детском технопарке «Кванториум» состоялся «SmartWeek»
Антиспам поле. Его необходимо скрыть через css
Ваше имя
Электронная почта
Оценка
Пожалуйста, оцените по 5 бальной шкале
Ваше сообщение
Вам понравилось? Расскажите о своем опыте своим друзьям в социальных сетях. Пусть им понравится тоже!
что это и как они работают
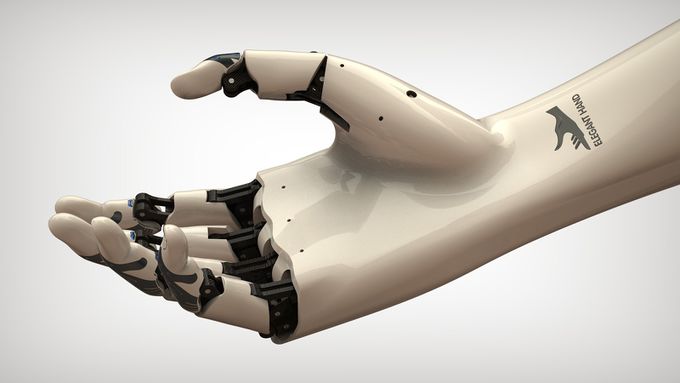
Сейчас современный электронный протез руки или ноги не воспринимается как что-то экзотическое. А как насчет протеза самого сложного и важного для человека органа?
А как насчет протеза самого сложного и важного для человека органа?
Алексей Паевский
Если человек потерял в результате травмы руку или ногу, медицина еще с древности предлагала заменить потерю протезом. Со временем протезы становились все совершеннее — от деревяшки Джона Сильвера до сложных бионических конструкций, управляющихся нервными импульсами от естественных нервных окончаний человека или через электроэнцефалограмму. Сейчас, если у человека отказывает печень или почка, если гибнет сердце — их можно заменить искусственным органом или трансплантировать донорский. Заменяют кожу, суставы, волосы и многое другое. Тем не менее существует один орган, о протезировании которого речь пока не идет. Это мозг.
Не занимайтесь самолечением! В наших статьях мы собираем последние научные данные и мнения авторитетных экспертов в области здоровья. Но помните: поставить диагноз и назначить лечение может только врач.
Действительно, иногда после инсульта «отказывает» крошечный участок головного мозга, но и это приводит к ужасающим последствиям — потере памяти, параличу и т. д. Можно ли заменить протезом хотя бы участок мозга?
д. Можно ли заменить протезом хотя бы участок мозга?
Вспомнить всё
Вообще, под словом нейропротезы понимают две разные вещи. Первая — это роботизированные протезы, которые управляются имплантированными в мозг электродами, они помогают полностью парализованным больным. Вторая — это когда электроды подводятся к сохранившимся остаткам нервных волокон, шедших когда-то к утраченной конечности.
Однако такие нейропротезы на территорию пораженного мозга не вторгаются. Первую попытку предпринял в 2012 году американский невролог Теодор Бергер, создавший протез средней части гиппокампа. Правда, только у крыс и весьма своеобразный. В гиппокамп крыс ввели несколько десятков электродов. Часть из них «снимала» электрическую активность, часть позволяла стимулировать электрическими импульсами нейроны. Потом крыс научили запоминать, в какой из кормушек лежит еда. Параллельно следили за активностью гиппокампа в те моменты, когда животное принимало правильное (и неправильное) решение, устанавливая, какая часть гиппокампа «отвечала» за память о месте расположения лакомства.
Повреждение этого места приводило к тому, что крыса забывала о том, куда положили ее обед. Однако после стимуляции поврежденного участка электродами (при помощи специального чипа) животное вспоминало о своих успехах и находило еду. Более того, если животное просто забывало (такое случается и с нами, правда?), то стимуляция гиппокампа с помощью чипа тоже приводила к «включению» памяти.
Подобрать код
Чтобы правильно стимулировать гиппокамп, нужен особый «код активации» — электрическая активность «входящего» импульса. Для этого Бергер измерял активность всего гиппокампа во время поиска кормушки с едой. И именно для этого нужен чип, который передает активационный код с «входящей» зоны на зону памяти. И нужна еще специальная математическая модель, которая «вычленяет» нужный сигнал по снимаемой электроэнцефалограмме и передает его в чип. Значит ли это, что все-таки можно будет заменить весь мозг, подсмотрев коды активации для всех навыков организма? В обозримом будущем вряд ли.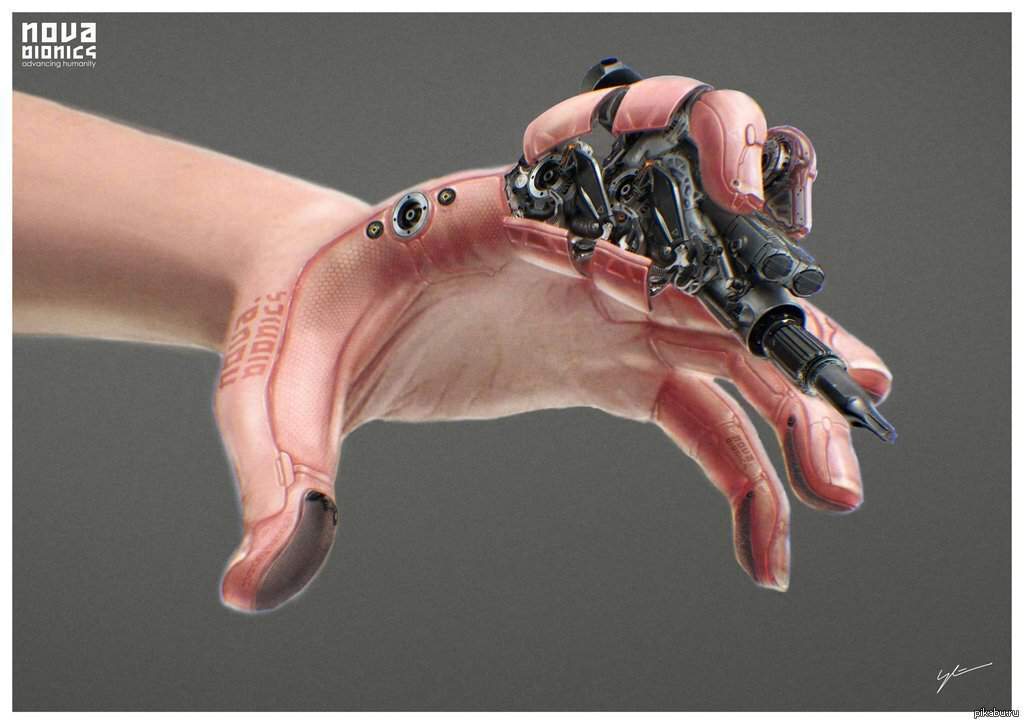
Распутать провода
Однако создать какие-то нейроимпланты для человеческого мозга, которые помогут «обходить» пораженные при инсульте зоны (а та пресловутая средняя часть гиппокампа, кстати, очень часто поражается при инсульте), вполне возможно в ближайшие десять лет, и несколько научных коллективов в мире уже трудятся над этим. Существует несколько глобальных проектов по картированию мозга, постепенно расшифровывается коннектом — порядок соединения друг с другом всех нейронов мозга (к слову, вариантов коннектома больше, чем атомов во Вселенной), начинают изучаться и картироваться и вспомогательные клетки мозга — глия, составляющая около 40% нашего главного органа. Возможно, лавинообразное накопление всех этих данных поможет через несколько десятилетий заменить если не весь мозг, то некоторые его части.
адаптивных роботизированных протезов — MIT Media Lab
адаптивных роботизированных протезов — MIT Media Lab
Найдите людей, проекты и т.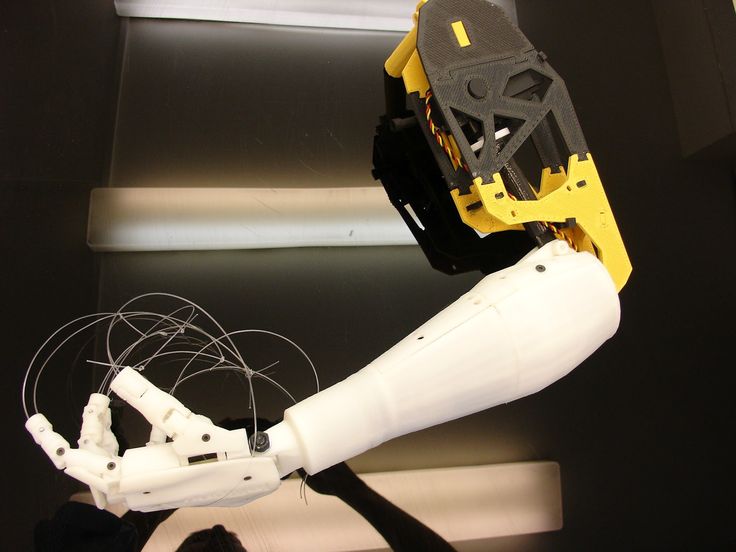 д.
д.
Роман Столяров
9 сентября 2020 г.
Люди
Роман Столяров
Ассистент-исследователь
Проекты
Адаптивный к рельефу местности протез нижней конечности
Группы
Меня зовут Роман Столяров, и для своей кандидатской работы в Media Lab я разработал адаптивную систему управления для роботизированных протезов ног. В то время как современные протезы позволяют передвигаться людям с ампутированными ногами, способ передвижения, которым они передвигаются, часто утомителен, неудобен и обременителен для их неповрежденных суставов. В худшем случае неровная геометрия местности — от неровных тротуаров до труднопроходимых пешеходных троп — может быть затруднена или невозможна для навигации с помощью обычных протезов, что обременяет подвижность, независимость и ощущение работоспособности пользователя. Моя работа была направлена на то, чтобы помочь людям с ампутациями чувствовать себя максимально здоровыми и мобильными, позволяя им беспрепятственно ходить независимо от рельефа местности.
В худшем случае неровная геометрия местности — от неровных тротуаров до труднопроходимых пешеходных троп — может быть затруднена или невозможна для навигации с помощью обычных протезов, что обременяет подвижность, независимость и ощущение работоспособности пользователя. Моя работа была направлена на то, чтобы помочь людям с ампутациями чувствовать себя максимально здоровыми и мобильными, позволяя им беспрепятственно ходить независимо от рельефа местности.
Как член исследовательской группы по биомехатронике, я разработал способ управления роботизированным протезом, который позволяет пользователю более естественно ходить по разным поверхностям. Помимо повышения мобильности и комфорта, эта система управления также делает ходьбу более симметричной, снижает риск падения и снижает воздействие на биологические суставы. В свою очередь, это снижает риск хронических болей в спине и остеоартрита суставов, состояний, от которых страдают многие люди с ампутациями ног.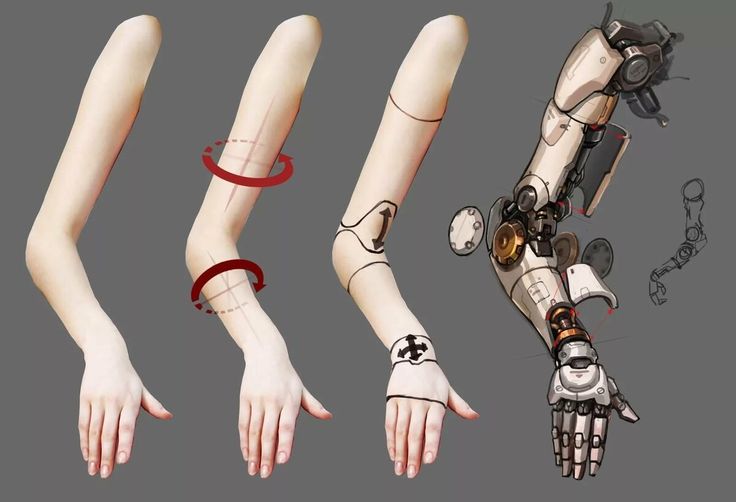
В отличие от большей части предыдущей работы в этой области, моя дипломная работа привела к созданию более простой, интуитивно понятной системы управления, которая лучше адаптируется к походке данного человека. Это позволяет системе быстро адаптироваться к различной геометрии рельефа и делает устранение неполадок при неправильной классификации относительно простым. Кроме того, поскольку пользователь может легче понять, как работает наша система, у него гораздо больше шансов добиться стабильной и надежной работы.
Креатив Коммонс
Attribution-NonCommercial-NoDerivatives 4.0 International
Кредит:
MIT Media Lab
Креатив Коммонс
Attribution-NonCommercial-NoDerivatives 4.0 International
Кредит:
MIT Media Lab
Люди с ампутациями, которые никогда не ходили с роботизированными протезами, часто скептически относятся к ним, впервые увидев их — по сравнению с обычными протезами, они увеличивают массу и объем и кажутся неуклюжими, когда вы впервые надеваете их.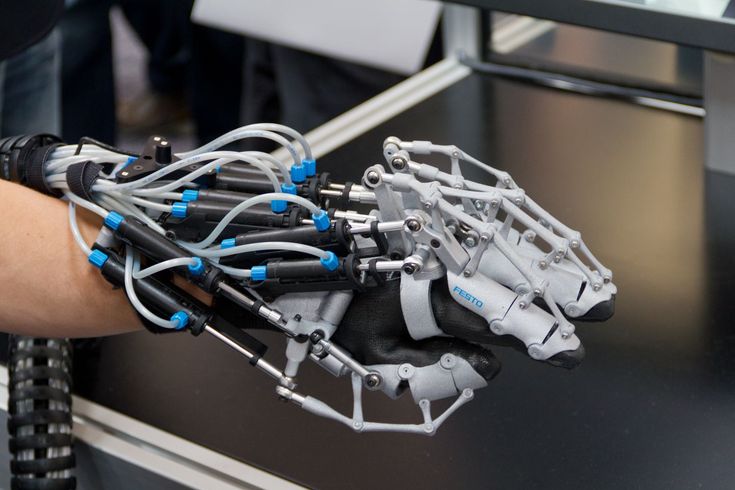 Но тогда мы попросили бы этих людей пройтись по устройствам. Пока они шли, мы настраивали программное обеспечение устройства, чтобы оно адаптировалось к рельефу местности почти так же, как это делают биологические конечности. Наши роботизированные протезы способны выполнять ряд реакций, например, отталкивать ногу пользователя от земли в нужный момент во время ходьбы или указывать на палец ноги, когда он спускается по лестнице. Когда мы получали этот контроль в самый раз, наступал прекрасный момент осознания, который можно было увидеть на лице человека: впервые после ампутации он чувствовал не то, что он хромает, а то, что он идет. — О-о-о, теперь я понял! — восклицали они. «Я действительно чувствую, что это помогает мне ходить!» Нет ничего более вознаграждающего, чем это восклицание, этот взволнованный взгляд, когда человек, наконец, может использовать свое тело в полной мере.
Но тогда мы попросили бы этих людей пройтись по устройствам. Пока они шли, мы настраивали программное обеспечение устройства, чтобы оно адаптировалось к рельефу местности почти так же, как это делают биологические конечности. Наши роботизированные протезы способны выполнять ряд реакций, например, отталкивать ногу пользователя от земли в нужный момент во время ходьбы или указывать на палец ноги, когда он спускается по лестнице. Когда мы получали этот контроль в самый раз, наступал прекрасный момент осознания, который можно было увидеть на лице человека: впервые после ампутации он чувствовал не то, что он хромает, а то, что он идет. — О-о-о, теперь я понял! — восклицали они. «Я действительно чувствую, что это помогает мне ходить!» Нет ничего более вознаграждающего, чем это восклицание, этот взволнованный взгляд, когда человек, наконец, может использовать свое тело в полной мере.
Крис Шаллал, стажер MSRP, который тестировал протез, сказал: «Самый запоминающийся день в моей жизни — это работа с Романом Столяровым над новым протезом голеностопного сустава Мэтью Карни с электроприводом TF-08. протестировал его алгоритм обнаружения местности, который позволил мне подниматься и спускаться по лестнице, преодолевать возвышенности и ходить с гораздо большей легкостью».
протестировал его алгоритм обнаружения местности, который позволил мне подниматься и спускаться по лестнице, преодолевать возвышенности и ходить с гораздо большей легкостью».
Вероятно, самая сложная часть работы связана с сочетанием человеческой изменчивости и индивидуальной чувствительности человека. Люди ходят по-разному, и походка одного человека может меняться в зависимости от множества условий, как внутренних, так и внешних. В то же время способов неправильного или неудобного управления роботизированным протезом гораздо больше, чем правильных. Таким образом, возникают взаимосвязанные проблемы разработки систем управления, которые одновременно применимы к широкому кругу людей и точно адаптируются к условиям, в которых данный пользователь чувствует себя комфортно и получает помощь.
Еще одним сложным аспектом этой работы является определение и количественная оценка улучшений. Люди часто сообщают о том, что чувствуют себя менее комфортно, даже если цифры, описывающие их походку, выглядят более нормальными, или более комфортными, даже если цифры не совсем совпадают. Как биомедицинские ученые и инженеры, мы должны постоянно учитывать субъективную обратную связь человека относительно комфорта, в то же время помня, что комфорт не обязательно приводит к самому здоровому результату. Например, человек может привыкнуть ходить прихрамывая, но эта хромота может повысить вероятность развития остеоартрита в его компенсирующей конечности. Разрабатываем ли мы более удобные системы контроля или системы контроля, предотвращающие болезни? Ответ, как мы обнаружили, обычно лежит где-то посередине.
Как биомедицинские ученые и инженеры, мы должны постоянно учитывать субъективную обратную связь человека относительно комфорта, в то же время помня, что комфорт не обязательно приводит к самому здоровому результату. Например, человек может привыкнуть ходить прихрамывая, но эта хромота может повысить вероятность развития остеоартрита в его компенсирующей конечности. Разрабатываем ли мы более удобные системы контроля или системы контроля, предотвращающие болезни? Ответ, как мы обнаружили, обычно лежит где-то посередине.
В будущем мы хотели бы расширить наши технологии адаптации к местности на ампутации выше колена (поскольку сейчас технология реализована только для ампутаций ниже колена). Мы также считаем, что эта работа может применяться для управления экзоскелетами с электроприводом в оборонных, реабилитационных или даже развлекательных целях. В более общем плане в ближайшие несколько десятилетий произойдет постепенное слияние биологического мира (людей) и синтетического мира (роботов). Хотя многие люди усвоили социализированный страх перед робототехникой, связывая их с опасными научно-фантастическими видениями, такими как Терминатор, в конечном итоге робототехника будет широко использоваться в приложениях, которые помогают или реабилитируют людей — не как устрашающие формы вне нас, а второстепенные по отношению к людям формы. всегда помогая людям, и всегда под человеческим контролем.
Хотя многие люди усвоили социализированный страх перед робототехникой, связывая их с опасными научно-фантастическими видениями, такими как Терминатор, в конечном итоге робототехника будет широко использоваться в приложениях, которые помогают или реабилитируют людей — не как устрашающие формы вне нас, а второстепенные по отношению к людям формы. всегда помогая людям, и всегда под человеческим контролем.
Связанный контент
Публикация
Исследования
Отслеживание поступательного движения суставов ног для
Расширенное прогнозирование задач ходьбы
Столяров Р. М., Бернетт Г. и Герр Х. (2017). Поступательное отслеживание движений суставов ног для улучшенного прогнозирования задач ходьбы. IEEE Transactions по биомедицинской инженерии, 1-1. doi:10.1109/tbme.2017.2718528
Статья, июнь 2017 г.
в биомехатронике
#робототехника #здоровье #взаимодействие человека и машины +2 ещё
Публикация
Исследования
Конструкция и предварительные результаты упругого привода с серией реактивных сил для бионических протезов колена и голеностопного сустава
М.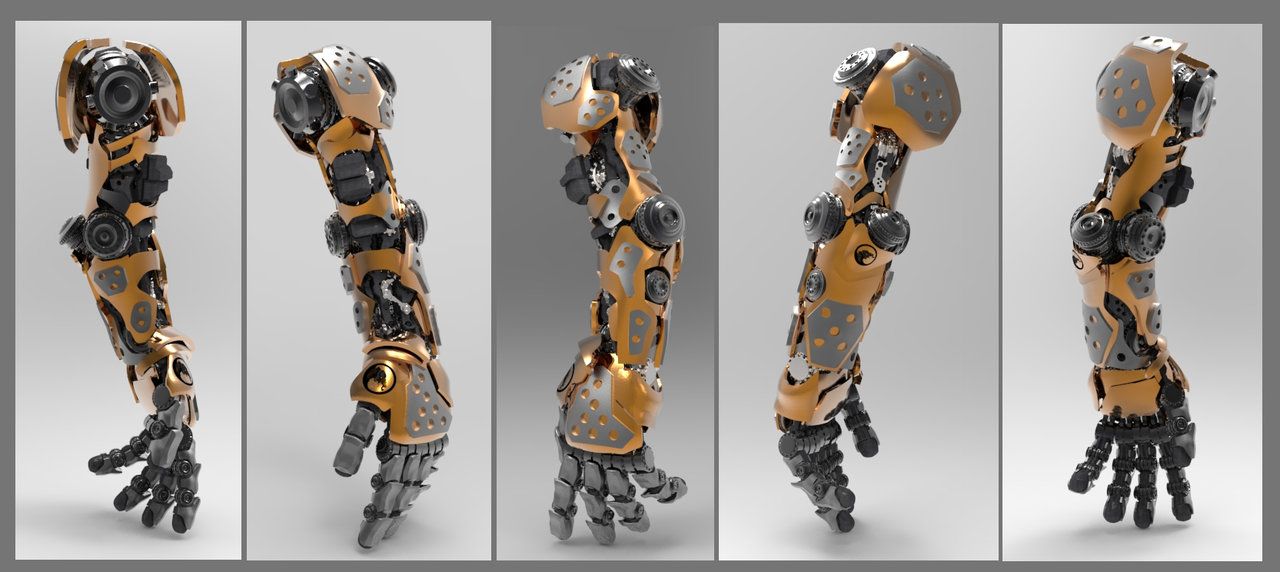 Э. Карни, Т. Шу, Р. Столяров, Дж. Ф. Дюваль и Х. М. Херр, «Проектирование и предварительные результаты упругого привода серии силы реакции для бионических протезов коленного и голеностопного суставов», в IEEE Transactions on Medical Robotics and Bionics, vol. 3, нет. 3, стр. 542-553, август 2021 г., doi: 10.1109/TMRB.2021.3098921.
Э. Карни, Т. Шу, Р. Столяров, Дж. Ф. Дюваль и Х. М. Херр, «Проектирование и предварительные результаты упругого привода серии силы реакции для бионических протезов коленного и голеностопного суставов», в IEEE Transactions on Medical Robotics and Bionics, vol. 3, нет. 3, стр. 542-553, август 2021 г., doi: 10.1109/TMRB.2021.3098921.
Академический доклад, июль 2021 г.
в биомехатронике
#робототехника #дизайн #взаимодействие человека и компьютера +2 ещё
Артикул
Исследования
Аашини Шах, один из 13 студентов, аспирантов и выпускников Массачусетского технологического института, получивших стипендии Фулбрайта в 2022–2023 годах
Спонсируемая Государственным департаментом США студенческая программа Фулбрайта предлагает гранты более чем в 150 странах.
через Новости Массачусетского технологического института · 20 мая 2022 г.
в биомехатронике
Публикация
Исследования
Примитивы углового момента для ходьбы человека: биомеханика и управление
М. Попович и А. Энглхарт.
Попович и А. Энглхарт.
Примитивы углового момента для ходьбы человека: биомеханика и управление,
Международная конференция IEEE/RSJ по интеллектуальным роботам и системам, том. 2, стр. 1685–1691, 2004.
Материалы, октябрь 2004 г.
в биомехатронике
#робототехника #здоровье #взаимодействие человека и машины +2 еще
{{# каждое изображение}}
{{/каждый}}
Предыдущий
Следующий
из
{{# каждое изображение}}
{{ заглавие }}
{{{ заголовок }}}
{{/каждый}}
Применение интерфейсов мозг-компьютер для управления роботами и протезами рук
Обзор
. 2020;168:87-99.
2020;168:87-99.
doi: 10.1016/B978-0-444-63934-9.00008-1.
Марко Вилела
1
, Ли Р. Хохберг
2
Принадлежности
- 1 Инженерная школа и Институт изучения мозга им. Карни, Брауновский университет, Провиденс, Род-Айленд, США.
- 2 Инженерная школа и Институт изучения мозга им. Карни, Брауновский университет, Провиденс, Род-Айленд, США; Центр нейрореставрации и нейротехнологий, Медицинский центр по делам ветеранов, Провиденс, Род-Айленд, США; Центр нейротехнологий и нейровосстановления, Массачусетская больница общего профиля, Гарвардская медицинская школа, Бостон, Массачусетс, США. Электронный адрес: leigh_hochberg@brown.
 edu.
edu.
 edu.
edu.PMID:
32164870
DOI:
10.1016/В978-0-444-63934-9.00008-1
Обзор
Марко Вилела и др.
Handb Clin Neurol.
2020.
. 2020;168:87-99.
дои: 10.1016/B978-0-444-63934-9.00008-1.
Авторы
Марко Вилела
1
, Ли Р. Хохберг
2
Принадлежности
- 1 Инженерная школа и Институт изучения мозга им. Карни, Брауновский университет, Провиденс, Род-Айленд, США.
- 2 Инженерная школа и Институт изучения мозга им. Карни, Университет Брауна, Провиденс, Род-Айленд, США; Центр нейрореставрации и нейротехнологий, Медицинский центр по делам ветеранов, Провиденс, Род-Айленд, США; Центр нейротехнологий и нейровосстановления, Массачусетская больница общего профиля, Гарвардская медицинская школа, Бостон, Массачусетс, США. Электронный адрес: [email protected].
PMID:
32164870
DOI:
10.1016/В978-0-444-63934-9.00008-1
Абстрактный
Интерфейсы мозг-компьютер (BCI) могут улучшить качество жизни людей с тяжелыми двигательными нарушениями. BCI улавливают активность мозга пользователя и переводят ее в команды для управления эффектором, таким как компьютерный курсор, роботизированная конечность или устройство функциональной электростимуляции. Полное ловкое манипулирование роботизированными и протезными руками с помощью системы BCI было проблемой из-за неотъемлемой необходимости декодировать многомерные и желательно в реальном времени управляющие команды от нейронной активности пользователя. Тем не менее, такая функциональность является фундаментальной, если роботизированные или протезные конечности, управляемые BCI, должны использоваться для повседневной деятельности. В этой главе мы рассмотрим, как исследователи НКИ решили эту проблему и как новые решения могут улучшить взаимодействие пользователей с роботами-эффекторами.
BCI улавливают активность мозга пользователя и переводят ее в команды для управления эффектором, таким как компьютерный курсор, роботизированная конечность или устройство функциональной электростимуляции. Полное ловкое манипулирование роботизированными и протезными руками с помощью системы BCI было проблемой из-за неотъемлемой необходимости декодировать многомерные и желательно в реальном времени управляющие команды от нейронной активности пользователя. Тем не менее, такая функциональность является фундаментальной, если роботизированные или протезные конечности, управляемые BCI, должны использоваться для повседневной деятельности. В этой главе мы рассмотрим, как исследователи НКИ решили эту проблему и как новые решения могут улучшить взаимодействие пользователей с роботами-эффекторами.
Ключевые слова:
БрейнГейт; внутрикорковый; Протез; Робот.
© 2020 Elsevier B.V. Все права защищены.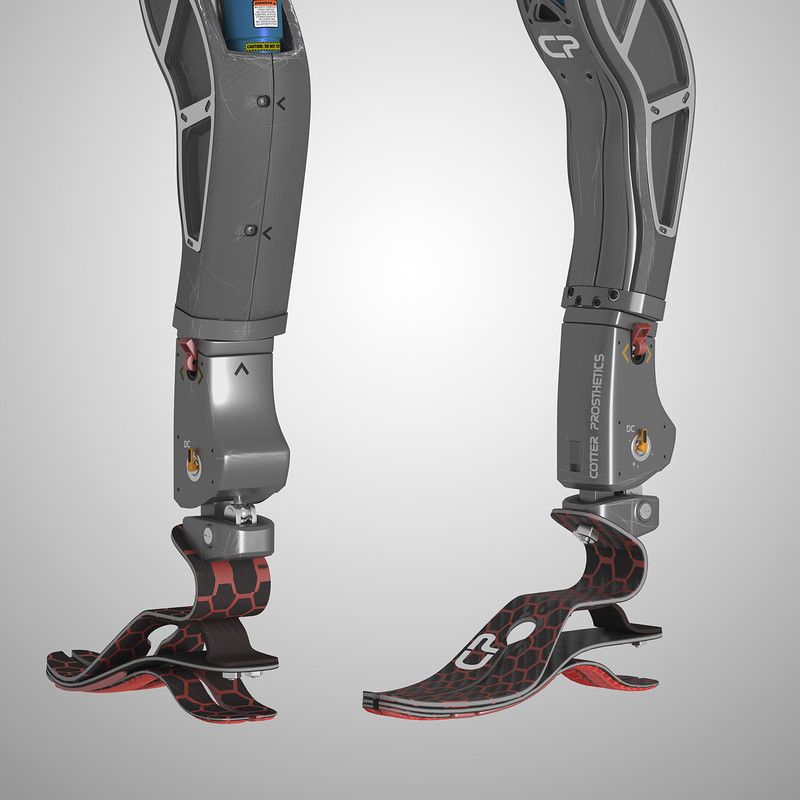
Заявление о конфликте интересов
Отказ от ответственности Ответственность за содержание этой главы лежит исключительно на авторах и не обязательно отражает официальную точку зрения Департамента по делам ветеранов или правительства США.
Похожие статьи
Система роботизированной руки с приводом от мозга, использующая неинвазивный гибридный мозг-компьютерный интерфейс и общую стратегию управления.
Цао Л., Ли Г., Сюй Ю., Чжан Х., Шу С., Чжан Д.
Цао Л. и др.
Дж. Нейронная инженерия. 2021 5 мая; 18 (4). doi: 10.1088/1741-2552/abf8cb.
Дж. Нейронная инженерия. 2021.PMID: 33862607
Управление системой роботизированной руки с 7 степенями свободы с помощью BCI на основе SSVEP.
Чен Х, Чжао Б, Ван Ю, Сюй С, Гао Х.
Чен Х и др.
Int J Neural Syst. 2018 Окт;28(8):1850018. дои: 10.1142/S0129065718500181. Epub 2018 12 апр.
Int J Neural Syst. 2018.PMID: 29768990
Обучение пользователей хирургической робототехнике на основе BCI.
Оливьери Э., Барреси Г., Маттос Л.С.
Оливьери Э. и др.
Annu Int Conf IEEE Eng Med Biol Soc. 2015 авг; 2015: 4918-21. дои: 10.1109/ЕМВС.2015.7319495.
Annu Int Conf IEEE Eng Med Biol Soc. 2015.PMID: 26737395
Интерфейсы мозг-компьютер в реабилитационной медицине.
Бокбрейдер М.А., Франсиско Г., Ли Р., Олсон Дж., Солинский Р., Бонингер М.Л.
Бокбрадер М.А. и соавт.
PM R. 2018 Sep;10(9 Suppl 2):S233-S243. doi: 10.1016/j.pmrj. 2018.05.028.
ПМ Р. 2018.PMID: 30269808
Обзор.
Двунаправленные интерфейсы мозг-компьютер.
Хьюз С., Эррера А., Гонт Р., Коллинджер Дж.
Хьюз С. и др.
Handb Clin Neurol. 2020;168:163-181. doi: 10.1016/B978-0-444-63934-9.00013-5.
Handb Clin Neurol. 2020.PMID: 32164851
Обзор.

 2018.05.028.
2018.05.028.Посмотреть все похожие статьи
Цитируется
Настоящее и будущее нейроинтерфейсов.
Валериани Д., Санторо Ф., Иенса М.
Валериани Д. и соавт.
Передний нейроробот. 2022 11 октября; 16:953968. doi: 10.3389/fnbot.2022.953968. Электронная коллекция 2022.
Передний нейроробот. 2022.PMID: 36304780
Бесплатная статья ЧВК.Обучение на основе интерфейса мозг-машина для улучшения функции верхних конечностей после инсульта: метаанализ рандомизированных контролируемых исследований.
Се YL, Ян YX, Цзян Х, Дуань XY, Гу LJ, Цин W, Чжан Б, Ван YX.
Се Ю.Л. и соавт.
Фронтальные нейроски. 2022 3 авг; 16:949575. doi: 10.3389/fnins.2022.949575. Электронная коллекция 2022.
Фронтальные нейроски. 2022.PMID: 35992923
Бесплатная статья ЧВК.Кортиколимбическая пластичность, управляемая интеллектуальными устройствами, в когнитивно-эмоциональной реструктуризации связанных с космосом нейропсихиатрических заболеваний и травм.
Кларк КБ.
Кларк КБ.
Жизнь (Базель). 2022 4 февраля; 12 (2): 236. doi: 10.3390/life12020236.
Жизнь (Базель). 2022.PMID: 35207523
Бесплатная статья ЧВК.Обзор.
Повышение ставок для кортикальных зрительных протезов.
Бошан М.С., Боскинг В.