Содержание
Использование виртуальных моделей роботов для проведения лабораторных работ
Робототехника внесла
существенный вклад в повышение производительности и качества, однако
ввод в эксплуатацию роботизированной ячейки, а так же обучение
высококвалифицированных специалистов (в том числе и студентов) в
условиях реального производства может оказаться весьма затратным с
точки зрения финансов и времени.
Широко используемые
компьютерные информационные технологии наглядно поясняют теорию
реальных процессов и объектов, но не дает возможности поработать с
реальной аппаратурой. Поэтому актуальна разработка виртуальных
моделей реальных технологических объектов (роботов, станков и т.п.).
Проектирование
методического и материально-технического обеспечения лабораторных
циклов по учебным дисциплинам связано с преодолением достаточно
противоречивых ограничений, среди которых наиболее существенными
представляются:
сохранение дидактических средств для
приобретения навыков работы с приборами и исследуемыми объектами;
гибкость комплектования лабораторных
установок объектами исследования и приборами;
обеспечение мер безаварийной
эксплуатации приборов и сохранности исследуемых объектов в процессе
выполнения работы и при непреднамеренных нарушениях режимов;
стоимость обеспечения лабораторного
цикла;
возможность тиражирования и поставки
средств обеспечения лабораторных циклов потребителям.
Для ознакомления
студентов с роботами и обучения технологическому программированию
рациональнее использовать учебные модели роботов или трехмерные
виртуальные модели, с системой управления соответствующей системе
реального робота [4, c. 102]. Но и
настольные роботы весьма дорогостоящи. Модели роботов имеют ряд
преимуществ и особенностей, таких как:
модель имеет все степени свободы
присущие реальному технологическому объекту,
модель предусматривает режим Авария
— ситуацию, связанную с недопустимым действием робота, например,
удар рабочим органом о стол или другой предмет,предусмотрен режим
восстановления после аварии,
расположение рабочих окон и в Ручном
и Автоматическом режимах не вызывает
затруднений в прочтении данных и наблюдении за объектом,
реализованы подсказки, позволяющие
ориентироваться пользователю в интерфейсе программы –
имитатора,
модель позволяет рассматривать сцену в
различных ракурсах в трёхмерном пространстве,
можно изменять уровень освещения сцены,
выбрать раскраску, включать и отключать объекты, которые в данный
момент мешают увидеть перемещение блоков модели,
в файле помощи содержатся исчерпывающие
инструкции по работе с соответствующей моделью.

Учитывая описанные выше
преимущества, были реализованы виртуальные модели, которые в
настоящее время успешно используются во время проведения лабораторных
работ по дисциплинам, связанным с изучением гибких производственных
систем. В частности разработаны компьютерные имитаторы робота РБ241 с
позиционным управлением, покрасочного робота с контурным управлением
и модель горизонтального копировально-фрезерного станка, и так же
построена модель пневматического робота ЦПР-1П с цикловым программным
управлением.
Для построения моделей использовались
программные среды Delphi,
SolidWorks,
Autodesk 3ds Max.
Интерфейс имитатора робота РБ241
изображен на рисунке 1. Он включает в себя трехмерную сцену,
состоящую из виртуальных модели робота и окружающей обстановки с
рабочим столами, операторскую панель для выбора режимов работы, пульт
управления. Модель позволяет перемещать предметы в трехмерном
пространстве.![]()
Рис. 1. Модель робота РБ241
Управление может производиться
последовательно по одной из осей Z, Q, R цилиндрической системы
координат, по оси α (вращение схвата) и перемещением лапок
схвата.
Выбор ручного или
автоматического режимов работы задаются с пульта управления и
операторской панели. Последовательность выполнения технологических
операций в автоматическом режиме задается технологической программой
(ТП). Рабочий орган робота передвигается в режиме позиционного
управления от одной специфицированной точки к другой. Информация о
каждой точке записывается в кадр ТП (достаточно точно соответствующей
реальной системе программирования робота), и состоит из информации
положений рабочего органа (геометрическая информация), группы
скорости движения и служебных координат для приведения в движение
схвата.
Программа может выполняться в
непрерывном, покадровом или пошаговом режимах, которые используются,
как и в реальном роботе, для отладки программы, например для контроля
ошибок управления или наличия аварийных ситуаций.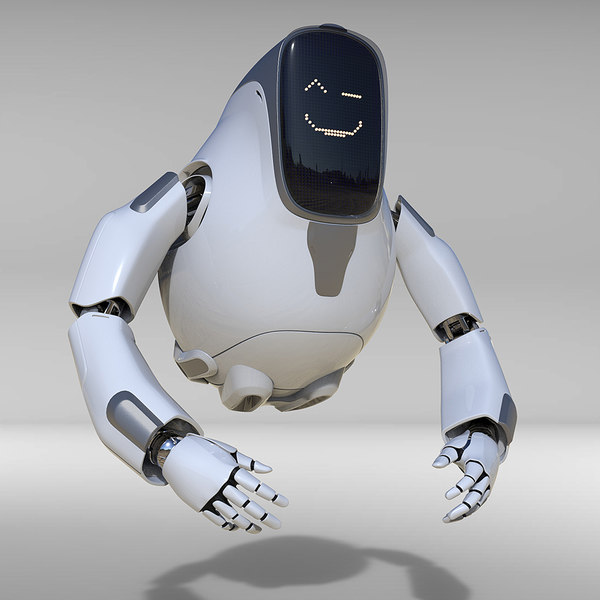
Модель покрасочного робота изображена на
рисунке 2 и отличается алгоритмом решения геометрической задачи.
Здесь используется контурное управление движением рабочего органа
(краскопульта) по заданной технологической программой нелинейной
траектории в трехмерной пространстве. В модели предусмотрена
регулировка интенсивности факела распылителя и смена цвета
закрашивания. Робот может окрашивать нелинейные поверхности.
Рис. 2. Модель покрасочного робота
На основе пространственной модели
копировально-фрезерного станка, изображенной на рисунке 3, студенты
могут ознакомиться с принципами построения станка, ознакомиться с
технологическим программированием в кодах ISO,
широко применяемых в системах управления различными технологическими
объектами. На этой модели, возможно, исследовать различные алгоритмы
копирования изделий на станке и алгоритмы управления динамическим
объектом в многомерном пространстве.
Рис. 3. Модель фрезерного станка
Модель станка обеспечивает:
перемещение рабочего стола по трем
координатам в декартовом пространстве в ручном режиме и в
автоматическом в соответствии с задаваемой ТП,
подготовку, редактирование, сохранение
и считывание ТП, представленной в кодах ISO,
режим копирования изделия,
режим воспроизведения скопированного
изделия,
режим управления в соответствии с
введенной ТП,
установку на рабочем столе заготовки
для изготовления детали или детали для копирования из заданного
набора.
Ручное управление
моделью станка осуществляется кнопками, расположенными на виртуальном
пульте управления. В ручном режиме модель обеспечивает мерные и
немерные перемещения рабочего стола. Скорость, с которой
осуществляется движение, задается с помощью меню регулятор
переключения подачи и имеет размерность мм/мин.
В модели реализованы автоматический и
пошаговый режимы выполнения ТП. Текст ее выводится в специальное окно
ввода и редактирования текста. Редактировать ТП можно с клавиатуры.
Автоматическое выполнение программы осуществляется по нажатию клавиши
START. Во время ее выполнения блокируются
кнопки ручного управления и пошаговый режим.
Нажатие кнопки STEP
позволяет выполнять УП в полуавтоматическом режиме (выполнение
одного кадра). Абсолютные перемещения по координатам в ручном,
автоматическом и пошаговом режимах выводится на экран в виде цифровой
индикации.
Команда загрузить
деталь позволяет устанавливать объект (деталь) на стол станка.
Команда луч включает (отключает) отображение луча,
предназначенного для сканирования изделия и запоминания его формы.
Особенность модели
робота ЦПР-1П, изображенной на рисунке 4, состоит в том, что
она предназначена не только для изучения системы программирования, но
и позволяет изучать структурную организацию робота.
Модель построена в
системе автоматизированного проектирования
SolidWorks,
позволяющей проводить инженерный анализ и подготовку
производства изделий любой сложности и назначения.
Промышленный робот ЦПР-1П предназначен
для автоматизации процессов подачи или удаления деталей в сборочном и
штамповочном производстве и автоматизации операций загрузки-разгрузки
технологического оборудования различного назначения.
В модели запрограммирована система
управления роботом идентичная системе управления настоящим роботом
ЦПР-1П. Управление роботом включает два режима: автоматический и
ручной, при этом ручной несколько упрощен для более легкого
восприятия и знакомства с моделью.
Для подготовки программ
в модели присутствует панель управления, которая реализована с
помощью макросов, написанных на языке программирования Microsoft
Visual Basic 6.5,
при помощи SolidWorks API (интерфейс прикладного программирования).
Рис. 4. Модель
пневматического робота
Главное отличие модели от других это
простота интерфейса, приятная визуализация модели и крайне высокая
детализация внешнего вида робота и пульта управления. Однако отсюда и
недостаток, пожалуй, единственный, но весомый – невозможность
работы модели без установленного пакета SolidWorks.
Одним из направлений в изучении
манипулятора ЦПР-1П является работа с виртуальной моделью,
позволяющей изучить внешнее и внутреннее устройство робота.
Демонстрация выполнена в интерактивном
виде и представляет собой сборку манипулятора из основных модулей (на
рисунках 5 и 6 изображена модель, реализованная в пакете Autodesk 3ds
Max 2010).
Рис. 5. Демонстрация работы манипулятора
Рис. 6. Окружающая обстановка робота
ЦПР-1П
Сначала пользователю, на вкладке Внешнее
устройство предлагается из основных модулей элементов собрать
робот (рисунок 7), порядок сборки строго определен.
Рис. 7. Пример сборки робота
При нарушении порядка будет появляться
уведомление – Неверный порядок сборки,
если порядок верен, то – Сборка успешно
завершена. Кнопка сброс поможет в любой момент вернуться к
начальным значениям. Кнопка Демонстрация
станет активной только после завершения сборки, нажав на нее,
загрузится интерактивная анимированная модель манипулятора ЦПР-1П,
которая предоставляет возможность рассмотреть робот и анимацию его
движения со всех сторон.
Перейдя на вкладку Внутреннее
устройство, изображенную на рисунке 8, пользователь сможет
собрать внутренние блоки манипулятора, так же ограниченные строгим
порядком.
Рис. 8. Сборка внутреннего устройства
робота
Для обучения студентов особенностям
построения и технологического программирования гибкого
автоматизированного производства была разработана модель ГАП на
основе виртуальных моделей сборочного робота, копировально-фрезерного
станка, технологического конвейера, склада [4].
Все модели входящие в
ГАЛ расположены в последовательности изображенной на рисунке 9.
Рис. 9. Схема расположения моделей на
сцене
Модель сварочного робота создана на
основе реального сварочного робота ТУР-10. Основная область их
применения – это автоматизация точечной и дуговой сварки,
зачистка заусенцев после штамповочных операций, сортировка и
отбраковка продукции, загрузка буферных межоперационных накопителей.
Эти роботы имеют антропоморфный манипулятор с пятью или шестью
звеньями в зависимости от модификации. Модель выполняет только
необходимые нам функции реального робота, а именно проведение сварки.
Модель обеспечивает: перемещение
манипулятора робота по трем координатам в сферической системе
координат; перемещение рабочего органа робота в автоматическом
режиме, согласно загруженной технологической программе; процесс
сварки нескольких различной формы деталей; возможность изменять
угловую скорость манипулятора в ручном и автоматическом режимах. В
В
модели предусмотрены аварийные ситуации типа залипание
электрода и исчезновение искры.
Разработанные модели широко используются
при обучении студентов по очной и дистанционной технологиям в ТГУ и
ТУСУРе (г. Томск) [1, 2, 3].
Литература:
Раводин О.М. Использование современных
технологий в учебном процессе ВУЗа / О.М. Раводин, Л.А. Туровец,
А.П. Зайцев, М.С. Бахарев // Успехи современного естествознания. –
2004. – №3. – С. 59–61.
Зайцев А.П. Программные средства для
дистанционного обучения / А.П. Зайцев, О.М. Раводин, А.А. Шелупанов
// Открытое и дистанционное образование. – 2003. – №2. –
С. 20–26.
Зайцев А.П. Опыт организации
дистанционного обучения студентов на каф. КИБЭВС ТУСУРа / А.П.
Зайцев, О.М. Раводин, Л.А. Торгонский // Межвузовский сборник
научных трудов. Сер. Образовательные технологии. – 2005. –
Вып. 14.
Раводин О. М. Модель гибкой
производственной линии и ее использование в учебном процессе / О.М.
Раводин, Л.А. Козлова // Успехи современного естествознания. –
2008. – №1. – С. 102–104.
 М. Модель гибкой
М. Модель гибкой
Основные термины (генерируются автоматически): модель, ISO, автоматический режим, пошаговый режим, система управления, покрасочный робот, пульт управления, реальный робот, рисунок, технологическое программирование.
Наземные военные роботы. США. Производители и модели
Ford
Ford SIAM, США
Роботизованный зенитный ракетный комплекс. Способен выпускать противосамолетные ракеты по любому летательному аппарату, находящемуся в зоне его ответственности. Испытан в начале 1980-х годов.
General Dynamics, США
MUTT, General Dynamics, США
Multi-Utility Tactical Transports (многофункциональный тактический транспорт). Телеуправляемый гусеничный робот военного назначения.
Телеуправляемый гусеничный робот военного назначения.
Изображение: gdls.com
2020.06 В ноябре 2019 года стало известно о массовой закупке колесных роботов MUTT (Multi-Utility Tactical Transport, многофункциональный тактический транспорт), способных перевозить до 450 кг грузов в течение 72 часов. Аппараты разработаны в вариантах 4х4, 6х6 и 8х8, однако, при необходимости, колеса можно заменить на гусеницы. Робот самостоятельно следует за солдатами, однако управлять им можно и с пульта.
MUTT способен нести на борту пулеметы Browning M2, FN Hershel 240B или Squad Automatic Weapon M249, 60-мм миномет или систему для запуска разведывательного беспилотника.
По информации Defense News, армия США закупила 624 единицы MUTT за $162.4 млн. Стоимость одного аппарата в декабре 2019 года составила $260 тысяч. / robotrends.ru
В 2017 году участвовал в учениях морпехов США.
HDT Global, США
Hunter WOLF
Hunter WOLF. Изображение: hdtglobal.com
Изображение: hdtglobal.com
HDT Global представили Hunter WOLF, способный нести на борту 450 кг грузов и дистанционно-управляемый модуль с пулеметом калибра 7.62 или 12.7 мм. Устройство разгоняется до 32 км/ч, дальность хода достигает порядка 100 км. При необходимости робот может получить броню, способную обеспечить защиту от стрелкового оружия калибром до 12.7 мм, включительно.
iRobot
iRobot 110 FirstLook, США
2.3 кг. Официальная страница 310 FirstLook. iRobot, разработчик. Офсайт iRobot.
iRobot 310 SUGV, США
Портативный робот для использования в мобильных операциях. Гусеничный. Официальная страница iRobot 310 SUGV. iRobot, разработчик. Офсайт iRobot.
iRobot 510 PackBot, США
Робот для манипуляций, обнаружения и исследования. Гусеничный. Официальная страница 510 PackBot. Применяется морпехами США в боевых условиях. По-сравнению с аналогами отличается небольшими размерами, что позволяет использовать их в сложных боевых условиях. Он также более быстрый и позволяет осуществлять различные операции, необходимые бойцам. Дальность действия — около сотни метров. Несколько камер обеспечивают круговой обзор, также есть камера на манипулятора, поэтому можно видеть, что робот захватывает. Управление джойстиком пульта. iRobot, разработчик. Офсайт iRobot.
Применяется морпехами США в боевых условиях. По-сравнению с аналогами отличается небольшими размерами, что позволяет использовать их в сложных боевых условиях. Он также более быстрый и позволяет осуществлять различные операции, необходимые бойцам. Дальность действия — около сотни метров. Несколько камер обеспечивают круговой обзор, также есть камера на манипулятора, поэтому можно видеть, что робот захватывает. Управление джойстиком пульта. iRobot, разработчик. Офсайт iRobot.
2015.05.22 How robots are helping Marines save lives on battlefield.
iRobot 710 Kobra, США
Гусеничный робот, высотой до 3.5 м, весом до 150 кг. Официальная страница 710 Kobra.
Nortrop Grumman, Pratt Miller, США
2021.10.14 Northrop Grumman Corp. представила видео с испытаний модульной гусеничной платформы с вооружением среднего калибра — Pratt Miller EMAV-MCA. Платформа была показана с орудием XM813 Bushmasster Chain Gun.
Видео: youtu.be
В рамках испытаний робот произвел выстрел из орудия патроном Northrop Grumman NG1170W Armor Piercing Fin Stabilized Discarding Sabot (APFSDS) 30×173 мм по стальной пластине.
При весе около 3 тонн робот способен принимать на борт до 3260 кг полезной нагрузки. Доступные для робота скорости — вплоть до 70 км/ч.
Энергоустановка платформы — гибридная, что обеспечивает в том числе и малошумную мобильность.
Гусеницы и низкий центр тяжести позволяют EMAV преодолевать подъемы до 60% и боковые уклоны до 40%, а также ступени высотой до 60 см.
Корпус робота специально выполнен узким, чтобы его можно было транспортировать на вертолетах V-22 и CH-47.
Источник: defence-blog.com
QinetiQ (Foster-Miller | TALON), США
MAARS (Modular Advanced Armed Robotic System), QinetiQ, США
Модульная передовая вооруженная роботизированная система. Модульная конструкция, пулемет M240B, усовершенствованная система управления, обзора и оповещения. Рамное шасси. 12 км/ч. Телеуправление оператором, поддержка GPS, поддержка стандартной американской системы управления и командования. Вес — 150 кг. Полезная нагрузка до 45 кг. Пулемет может быть заменен на манипулятор и тогда система становится системой разминирования. Гусеницы могут быть заменены колесами.
Рамное шасси. 12 км/ч. Телеуправление оператором, поддержка GPS, поддержка стандартной американской системы управления и командования. Вес — 150 кг. Полезная нагрузка до 45 кг. Пулемет может быть заменен на манипулятор и тогда система становится системой разминирования. Гусеницы могут быть заменены колесами.
Talon V, qinetic, США
робот разминирования со сменными манипуляторами
QinetiQ и Pratt & Miller, США
EMAV
EMAV. Изображение: prattmiller.com
На выставке AUSA QinetiQ и Pratt & Miller анонсировали совместную разработку гусеничной автономной платформы EMAV, способную нести на борту модуль с 12.7-мм пулеметом.
Малошумный аппарат весит 3 тонны и может нести дополнительные 3.2 тонны полезной нагрузки, развивая скорость до 72 км/ч. Робот помещается в грузовые отсеки V-22 и CH-47.
Remotec Inc. , США
, США
Andros F6A, Remotec Inc., США
телеуправляемый наземный робот первичного осмотра и разминирования
Andros FX, Remotec Inc., США
телеуправляемый наземный робот первичного осмотра и разминирования
Andros HD1, Remotec Inc., США
телеуправляемый наземный робот первичного осмотра и разминирования
mini ANDROS II, США
102 кг. Используется, например, инженерными войсками Израиля, 2015. Remotec. Разработчик дистанционно управляемых военных роботов, дочерняя компания Northrop Grumman. Известна серией ANDROS, которая выпускается с 2005 года и предназначена прежде всего для обезвреживания боеприпасов. Разумеется, на них можно при необходимости установить оружие.
Mk VA1/RONS, США
340 кг, гусеничная. Remotec. Разработчик дистанционно управляемых военных роботов, дочерняя компания Northrop Grumman. Известна серией ANDROS, которая выпускается с 2005 года и предназначена прежде всего для обезвреживания боеприпасов. Разумеется, на них можно при необходимости установить оружие.
Разумеется, на них можно при необходимости установить оружие.
Wolverine, США
367-386 кг, гусеничная. Remotec. Разработчик дистанционно управляемых военных роботов, дочерняя компания Northrop Grumman. Известна серией ANDROS, которая выпускается с 2005 года и предназначена прежде всего для обезвреживания боеприпасов. Разумеется, на них можно при необходимости установить оружие.
Resquared, США
HDMS 551s1, Resquared, США
Особенность — наличие двух телеуправляемых манипуляторов на гусеничном ходу.
2016.05.11 Новый американский робот для разминирования пугающе ловок
Textron/Howe & Howe, США
Ripsaw M5, Textron/Howe & Howe, США
Ripsaw M5. Видео: youtu.be
В 2019 году Textron/Howe & Howe представили 10-тонный гусеничный робот RCV Ripsaw M5, способный нести на борту до 2.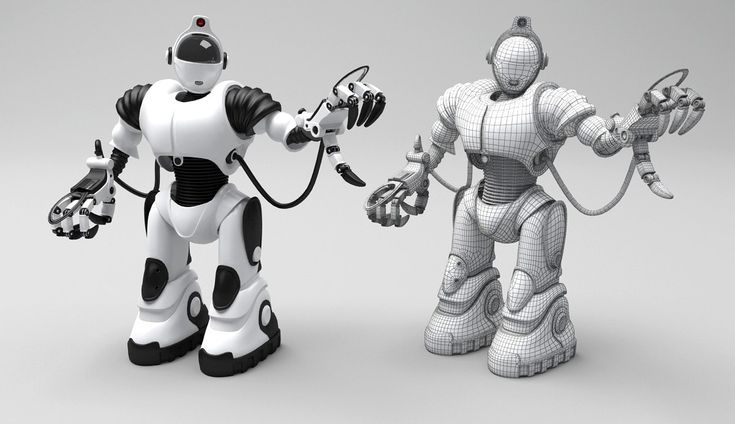 7 тонн вооружения и разведывательных систем. Аппарат разгоняется до 105 км/ч, способен обнаруживать и классифицировать цели в автоматическом режиме и обстреливать их по команде оператора.
7 тонн вооружения и разведывательных систем. Аппарат разгоняется до 105 км/ч, способен обнаруживать и классифицировать цели в автоматическом режиме и обстреливать их по команде оператора.
Телеуправляемая платформа на гусеничном ходу Ripsaw, способная нести самозарядное стрелковое оружие (например, пулемет M2 калибра 0.50, автоматический гранатомет Mk19 40 мм, пулемет M240B 7.62 мм, пулемет M249 Squad). Разработки начались ранее 2006 года. В 2015 году платформа управляется по-радио на удалении до 1 км от бронетранспортера, в котором находился «водитель» платформы. Кроме того, у оператора есть возможность дистанционной перезарядки оружия на платформе и даже замены оружия нажатием кнопки. Вышла версия Ripsaw EV2
2015.06.20 В США прошли испытания телеуправляемого по-радио варианта Ripsaw
Разработчик неизвестен
MDARS (Mobile Detection Assessment and Response System), США
Телеуправляемая 4-колесная платформа, похожая на гольфкар. Презназначена для телемониторинга контролируемой территории. Есть поддержка автоматического режима патрулирования за счет установленных на платформе обычных и ИК-камер, а также лидара. Задействован военными США в Джибути (Африка).
Презназначена для телемониторинга контролируемой территории. Есть поддержка автоматического режима патрулирования за счет установленных на платформе обычных и ИК-камер, а также лидара. Задействован военными США в Джибути (Африка).
2016.07.28 Военные США патрулируют Джибути при помощи роботов
Mk VA1/RONS, США
340 кг, гусеничная. Remotec. Разработчик дистанционно управляемых военных роботов, дочерняя компания Northrop Grumman. Известна серией ANDROS, которая выпускается с 2005 года и предназначена прежде всего для обезвреживания боеприпасов. Разумеется, на них можно при необходимости установить оружие.
Mark II Talon, США
Телеуправляемый робот-минер. Используется подразделениями морской пехоты США для осмотра и уничтожения любых подозрительных устройств или упаковок. Оснащен 4-мя камерами и устройством захвата в передней части робота. На 2015 год применялся в Афганистане и Ираке.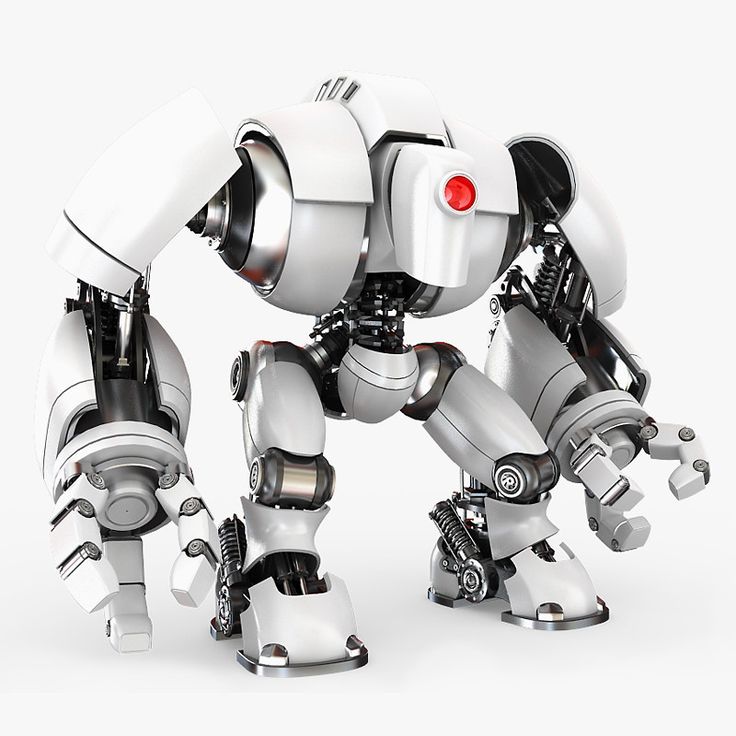
2015.05.22 How robots are helping Marines save lives on battlefield.
RipSaw, США
Телеуправляемая платформа на гусеничном ходу Ripsaw, способная нести самозарядное стрелковое оружие (например, пулемет M2 калибра 0.50, автоматический гранатомет Mk19 40 мм, пулемет M240B 7.62 мм, пулемет M249 Squad). Разработки начались ранее 2006 года. В 2015 году платформа управляется по-радио на удалении до 1 км от бронетранспортера, в котором находился «водитель» платформы. Кроме того, у оператора есть возможность дистанционной перезарядки оружия на платформе и даже замены оружия нажатием кнопки. Вышла версия Ripsaw EV2
2015.06.20 В США прошли испытания телеуправляемого по-радио варианта Ripsaw
TALON SWORDS (Special Weapons Observation Reconnaissance Detection Systems), США
специальная боевая система наблюдения и разведки. Предназначен преодолевать песок, воду и снег, подниматься по лестнице.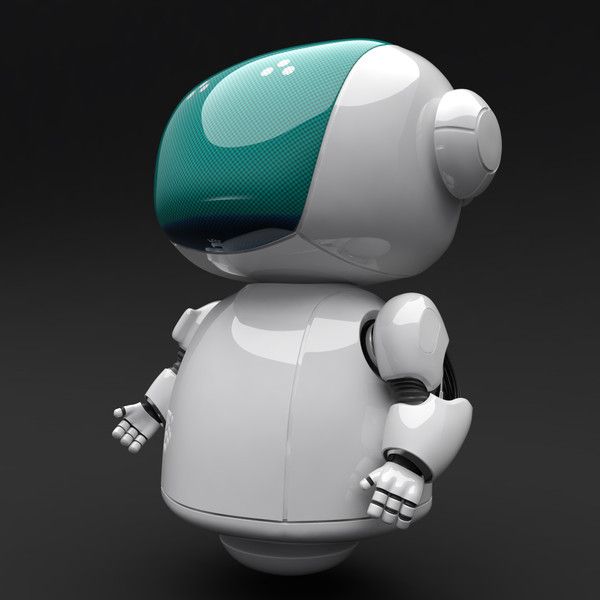 Гусеничный ход. Платформа адаптирована для оснащения оружием. 8.5 часов работы от батарей, до 7 суток в режиме ожидания. Управление оператором на расстоянии до 1000 метров. Вес 45 кг, 27 кг — версия для разведки. Может нести различные виды стрелкового вооружения. Применялся в Афганистане и Ираке. Бронирован. Стоит порядка $230 тыс. в 2011 году.
Гусеничный ход. Платформа адаптирована для оснащения оружием. 8.5 часов работы от батарей, до 7 суток в режиме ожидания. Управление оператором на расстоянии до 1000 метров. Вес 45 кг, 27 кг — версия для разведки. Может нести различные виды стрелкового вооружения. Применялся в Афганистане и Ираке. Бронирован. Стоит порядка $230 тыс. в 2011 году.
2011. Фотографии и характеристики TALON SWORDS.
Поиск Роботы FANUC по сериям
Готовы начать свое путешествие по автоматизации? Есть вопросы, прежде чем начать? Мы здесь, чтобы помочь.
Заполните форму ниже, и опытный эксперт по автоматизации FANUC свяжется с вами.
Для чего используются шарнирные роботы?
Шарнирные роботы являются наиболее распространенным типом роботов. «Сочлененный» — это термин, обозначающий способ движения осей и суставов. Оси и суставы обычно разрабатываются так, чтобы сдерживать движение в оболочке рабочего пространства. При рассмотрении этих типов роботов вы также можете найти модели, предназначенные для работы бок о бок с людьми, использующие шарнирное сочленение для безопасной работы, не сталкиваясь с людьми или другими механизмами. Прокрутите до серии Collaborative, чтобы увидеть наших шарнирных роботов, разработанных для безопасной работы в одном рабочем пространстве с людьми.
При рассмотрении этих типов роботов вы также можете найти модели, предназначенные для работы бок о бок с людьми, использующие шарнирное сочленение для безопасной работы, не сталкиваясь с людьми или другими механизмами. Прокрутите до серии Collaborative, чтобы увидеть наших шарнирных роботов, разработанных для безопасной работы в одном рабочем пространстве с людьми.
В шарнирной конструкции манипулятора робота используется ряд осей, начиная от моделей с 3 осями и заканчивая моделями с 7 осями. 6-осевой робот — одна из наиболее адаптируемых конфигураций шарнирных роботов. С 6 осями он может двигаться вперед и назад, вверх и вниз. Он также может рыскать, наклоняться и катиться, что приводит к сложному набору движений, которые могут имитировать движения человеческой руки. Это преимущество шарнирного робота позволяет ему делать такие вещи, как захват мелких предметов с полки и размещение их на конвейере. Такая же сложность делает шарнирных роботов отличным выбором для роботизированных упаковочных решений, укладки на поддоны и специальных приложений, таких как роботы для снятия заусенцев.
Преимущества шарнирных роботов включают большее количество степеней свободы (DOF), чем у других роботов, что делает их более универсальными. Интегрируя шарнирную конструкцию манипулятора робота в производственную линию, вы можете повысить свою производительность за счет увеличения скорости и повышения точности. Вы также улучшите качество и повысите гибкость, чтобы быстро адаптировать процесс к изменениям. Поскольку шарнирно-сочлененные роботизированные системы являются более распространенной частью производственного процесса, они также стали более доступными, что делает их жизнеспособным вариантом для малого и среднего бизнеса.
Роботы для сборки автомобилей могут включать шарнирных роботов, которые служат в качестве роботов для соединения материалов, роботов для нанесения покрытий и роботов для герметизации. Роботы могут быть частью линии и выполнять задачи независимо друг от друга, а могут работать совместно, чтобы помогать людям в производственном процессе.
Для чего используются роботы Delta?
Дельта-роботы — это роботы в форме зонтика, предназначенные для имитации движения руки. Однако этот робот очень быстрый, поэтому он может работать с гораздо большей точностью и скоростью, чем люди. Дельта-роботы, также известные как роботы с параллельным соединением или роботы-пауки, часто являются отличной альтернативой дорогим универсальным системам автоматизации.
Однако этот робот очень быстрый, поэтому он может работать с гораздо большей точностью и скоростью, чем люди. Дельта-роботы, также известные как роботы с параллельным соединением или роботы-пауки, часто являются отличной альтернативой дорогим универсальным системам автоматизации.
В дельта-роботах двигатели закреплены внутри рамы, благодаря чему масса и сопротивление остаются над рабочим пространством и вдали от сверхлегких рук и инструментов на конце руки. Роботы Delta обычно представляют собой роботов с легкой полезной нагрузкой и инструментами, которые могут включать захватный палец, вакуумную присоску, захватный рычаг или другое специальное приложение.
Из-за своей необычной конструкции дельта-роботы могут с исключительной ловкостью двигать руками в пределах своего рабочего пространства по осям x и y, но обычно с ограниченным движением по оси z. Их рабочая зона, как правило, более контролируемая и ограниченная, чем рабочая зона шарнирного робота. Дельта-роботам потребуется 4 или более осей для выполнения такой простой задачи, как перемещение предмета из мусорного ведра в коробку, или такой сложной, как захват бутылочек с таблетками или перемещение плоских предметов в положение стоя или другие типы переориентации деталей.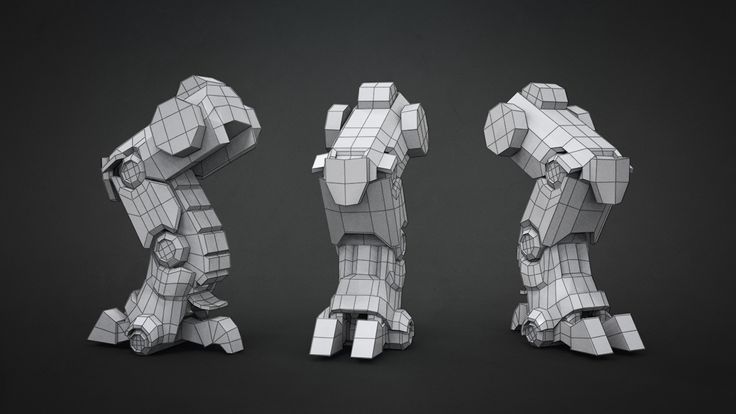
Исключительная ловкость роботов Delta делает их отличным выбором при выборе роботов для точной сборки, роботов для захвата и упаковки, а также роботов для захвата и размещения. Эти высокопроизводительные роботы часто являются хорошим выбором для роботизированных упаковочных решений. Добавление технологий машинного зрения позволяет этой серии роботов выполнять более сложные задачи, такие как размещение продуктов неправильной формы в коробчатых отсеках, например, перемещение продуктов питания в коробки.
Роботы Delta также подходят для использования на предприятиях, где действуют строгие правила охраны труда и техники безопасности. Их можно настроить в соответствии со стандартами производителей продуктов питания для промывки оборудования. Двигатели могут быть изолированы в корпусах, чтобы гарантировать, что продукты питания или фармацевтические продукты защищены от потенциальных загрязнителей, таких как смазочные материалы, фрагменты металла или пластика или пыль.
Дельта-роботы — удобный выбор для быстрого и последовательного выполнения повторяющихся задач. Это решение особенно полезно при замещении деятельности человека, которая вызывает умственную усталость или травмы от повторяющихся движений, такие как синдром запястного канала, боли в спине или тендинит.
Это решение особенно полезно при замещении деятельности человека, которая вызывает умственную усталость или травмы от повторяющихся движений, такие как синдром запястного канала, боли в спине или тендинит.
Специальные роботы и серийные приложения
Поскольку промышленные роботы могут быть сконфигурированы таким образом, что они предлагают почти бесконечную функциональность, их удобно сортировать по нескольким рабочим группам, называемым роботами по сериям. Шарнирно-сочлененные роботы и дельта-роботы — два самых популярных робота по сериям. Поскольку вы рассматриваете робототехнику для своего производства или производственного предприятия, есть шесть дополнительных категорий роботов по сериям для изучения.
Коллаборативные роботы
Хотя автоматизация с выключенным светом — захватывающая концепция, на многих объектах роботы работают вместе с людьми, выполняя особо повторяющиеся или опасные задачи. Это позволяет вашей команде сосредоточиться на более интеллектуальной или познавательной работе. Коллаборативные роботы или коботы в производстве предназначены для работы бок о бок с людьми. Они используют функции остановки безопасности вместо ограждения, уменьшая площадь, занимаемую роботом. Некоторые модели предназначены для легкой работы, например, небольшие сборочные роботы, в то время как другие созданы для выполнения тяжелой работы в таких отраслях, как автомобилестроение, металлообработка, дистрибуция и упаковка.
Коллаборативные роботы или коботы в производстве предназначены для работы бок о бок с людьми. Они используют функции остановки безопасности вместо ограждения, уменьшая площадь, занимаемую роботом. Некоторые модели предназначены для легкой работы, например, небольшие сборочные роботы, в то время как другие созданы для выполнения тяжелой работы в таких отраслях, как автомобилестроение, металлообработка, дистрибуция и упаковка.
Снижая нагрузку на сотрудников, эта серия роботов повышает безопасность на рабочем месте и позволяет людям сосредоточиться на более технически ориентированных задачах. У FANUC больше моделей коботов, чем у любого другого производителя коботов в отрасли, включая шесть моделей грузоподъемностью от 4 до 35 кг практически для любого производственного применения.
Роботы-укладчики на поддоны
Почти в каждой отрасли готовая продукция должна быть упакована в паллеты для транспортировки. Хотя в каждом секторе есть разные размеры готовой продукции с разными требованиями к весу и различными конфигурациями отгрузки, почти для каждой работы есть опция робота-укладчика на поддоны.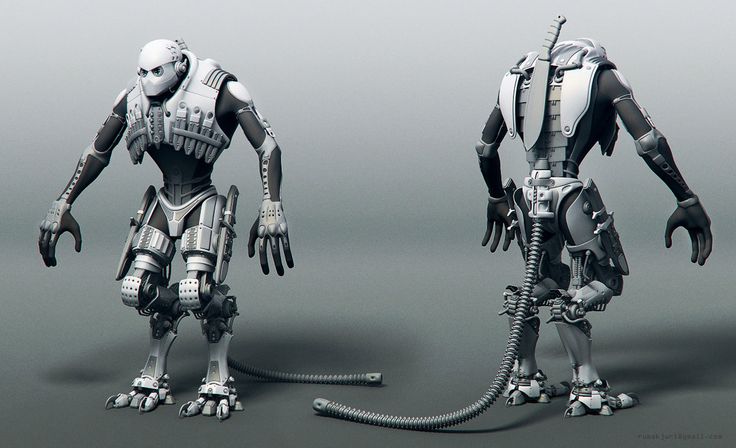
Роботы-укладчики на поддоны — это специализированное оборудование, которое служит в качестве робота для перемещения деталей. Эти сверхмощные роботы устанавливаются таким образом, что позволяют им взаимодействовать с последними этапами сборочной линии, чтобы захватывать, поднимать, перемещать и размещать полезные грузы в заданных конфигурациях.
Погрузочно-разгрузочные роботы для роботов-укладчиков с высокой грузоподъемностью могут включать полезную нагрузку до 2300 кг. FANUC был одним из первых поставщиков роботов, разработавших серию, специально предназначенную для укладки на поддоны, и по-прежнему лидирует в отрасли.
Роботы для дуговой сварки
Роботы для дуговой сварки FANUC используются во многих отраслях промышленности. Они легко настраиваются и могут работать в очень тесных или узких местах. Эти роботы были впервые использованы в автомобильной промышленности для сварки сидений, осей и других компонентов, взяв на себя некоторые из самых опасных задач в отрасли.
Современные сверхмощные роботы рассчитаны на суровые условия сварки, поэтому ваш персонал может сосредоточиться на менее опасных работах. Эти сварочные роботы имеют тонкую руку и полое запястье. Промышленные роботы для дуговой сварки могут быть запрограммированы на лазерную сварку, пайку и резку.
FANUC предлагает широкий выбор моделей, которые можно настроить в соответствии со сварочными требованиями вашей организации. Робот для дуговой сварки поставляется с различными инструментами, которые повышают универсальность и делают сварочные процессы более безопасными. FANUC также предлагает серию коботов для дуговой сварки, которые могут работать в одном пространстве с вашими операторами сварки.
Роботы с верхним креплением
Роботы с верхним креплением спроектированы так, чтобы быть достаточно легкими, чтобы безопасно устанавливаться над рабочим пространством как часть системы сборки роботов, что делает их разновидностью мобильных роботов. Верхние крепления или портальный робот могут позволить ему перемещаться над производственным или производственным процессом.
Верхние крепления или портальный робот могут позволить ему перемещаться над производственным или производственным процессом.
Если вы ищете робота с большой полезной нагрузкой, эти легкие верхние крепления могут выдерживать полезную нагрузку до 70 кг. Эти 6-осевые станки также обеспечивают исключительную универсальность, упрощая и делая более безопасным уход за рабочими местами и управление ими.
Роботы с верхним креплением также снижают затраты на техническое обслуживание и погрузочно-разгрузочные работы. Эти модели имеют ряд осей и множество вариантов монтажа.
Покрасочные роботы
Роботы для покраски обеспечивают большую согласованность и скорость покрасочных работ и повышают безопасность в опасных условиях окрасочных работ. Эти роботы для нанесения покрытий имеют гладкую алюминиевую поверхность, устойчивую к загрязнению, и их легко чистить. Алюминиевая поверхность также делает малярных роботов легкими, поэтому они могут работать с меньшим энергопотреблением. Полое запястье позволяет трубкам проходить через робота, устраняя необходимость прокладки внешних шлангов.
Полое запястье позволяет трубкам проходить через робота, устраняя необходимость прокладки внешних шлангов.
Конфигурации шарнирно-сочлененных роботов FANUC могут работать с широким спектром задач по окраске и нанесению покрытий. 6-осевое сочленение позволяет оптимизировать рабочую зону шарнирно-сочлененного робота. Поскольку мы разработали некоторые модели для работы в опасных условиях с широким диапазоном досягаемости, покрасочные роботы могут избавить людей от необходимости помещать людей в ситуации, опасные для их здоровья. Все малярные роботы FANUC проектируются и производятся в Рочестер-Хиллз, штат Мичиган, с 1982.
Серия SCARA
Роботы FANUC SCARA — быстрые, точные, простые в использовании и доступные по цене решения для максимальной производительности. Кроме того, роботы FANUC SCARA обеспечивают лучшую в своем классе скорость и производительность. Эти высокопроизводительные роботы предназначены для работы в составе роботизированной сборочной системы, для захвата и размещения, а также в качестве инспекционных роботов в различных приложениях.
Хотя роботы SCARA часто представляют собой небольшие сборочные роботы и могут считаться роботами с легкой полезной нагрузкой, в зависимости от модели они также могут обрабатывать полезную нагрузку до 6 кг. Поскольку они имеют конструкцию с креплением на пьедестале, они занимают меньшую площадь и работают в пределах эффективной рабочей зоны робота SCARA. Это открывает захватывающие возможности для различных роботизированных упаковочных решений.
Роботы SCARA | FANUC серии SR SCARA
Новые роботы FANUC SCARA
идеально подходят для высокоскоростных и точных операций, таких как сборка, захват и размещение, тестирование/проверка и процессы упаковки.
Готовы узнать больше?
Повышение скорости и точности с помощью роботов FANUC SCARA
Ищете способ повысить скорость, точность и повторяемость производственных процессов, требующих полезной нагрузки от 3 до 20 кг? Наша линейка роботов SCARA использовалась в производственных приложениях во всем, от автомобилей, медицинского оборудования, сборки и захвата и размещения до упаковки.
Познакомьтесь с последними моделями серии SCARA
Новые варианты моделей расширяют возможности FANUC для удовлетворения потребностей компаний, стремящихся автоматизировать свои процессы сборки, упаковки, подбора и размещения и проверки.
SCARA SR-3
и Кондиционер
- Полезная нагрузка:
3 кг - Достигать:
400 мм - Оси:
4
СКАР СР-3
и А/У
- Полезная нагрузка:
3 кг - Достигать:
350 мм - Оси:
4
SCARA SR-6
и Кондиционер
- Полезная нагрузка:
6 кг - Достигать:
650 мм - Оси:
4
Новый Р-30
и В
Компакт Плюс
Контроллер
Новый веб-интерфейс
i RProgrammer
Программный интерфейс
Новый SR-12
i A/SR-20 i A
Экологический
Опции
ПОДКЛЮЧИТЕСЬ
Запросить цену или запланировать демонстрацию
Когда робот SCARA является вашим правильным выбором?
Фото предоставлено Wauseon Machine and Manufacturing
Скорость соответствует точности
Предлагая новый уровень скорости и точности, роботы FANUC SCARA идеально подходят для роботизированной сборки, роботизированного захвата и перемещения, проверки и роботизированной упаковки. В зависимости от ваших потребностей роботы FANUC SCARA доступны с весом 3 кг.
В зависимости от ваших потребностей роботы FANUC SCARA доступны с весом 3 кг.
или 6 кг, 12 кг и 20 кг полезной нагрузки, а также включает два новых экологических варианта. Все модели работают в диапазоне 360° и, благодаря своей конструкции с креплением на подставке, занимают небольшую площадь, что позволяет экономить место. Интегрированные услуги предотвращают риск зацепления.
Благодаря своей скорости и воспроизводимости роботы FANUC SCARA обеспечивают отличный способ повысить производительность при сборке и сборке. Узнайте здесь, когда робот SCARA повысит эффективность вашей работы.
Конструкция SCARA состоит из двух ответвлений, соединенных в основании и на пересечении первого и второго ответвлений. Два независимых двигателя используют инверсную кинематику и интерполяцию в шарнирах J1 и J2 для управления X-Y SCARA.
движение. Окончательное положение X-Y на конце второго плеча зависит от угла J1, угла J2, длины первого плеча и длины второго плеча.
ЗАПРОСИТЬ ЦЕНУ
КАК УЗНАТЬ, ЧТО РОБОТ SCARA ЯВЛЯЕТСЯ ПРАВИЛЬНЫМ ВЫБОРОМ
ПОДРОБНЕЕ
Фото предоставлено Applied Manufacturing Technologies
Почему стоит выбрать FANUC SCARA?
Учитывая их скорость и повторяемость, роботы FANUC SCARA обеспечивают отличный способ повысить производительность роботизированных операций захвата и размещения или роботизированной сборки. Узнайте здесь, когда робот SCARA повысит эффективность вашей работы.
Узнайте здесь, когда робот SCARA повысит эффективность вашей работы.
Компактный дизайн
Роботы FANUC SCARA занимают сверхкомпактные габариты и минимизируют помехи для периферийных устройств, чтобы максимально эффективно использовать площадь вашего пола.
Простое восстановление после ошибок
Роботы FANUC SCARA, оснащенные выключателем тормоза на руке, обеспечивают простое устранение ошибок.
Рабочая зона 360°
Благодаря гибкости рабочей зоны 360° роботы FANUC SCARA доступны с вариантами досягаемости от 400 до 1100 мм.
Фото предоставлено QSI Automation
Часто задаваемые вопросы о роботах SCARA
Где используется робот SCARA?
Они используются в автомобильной, электронной, медицинской, упаковочной и многих других отраслях промышленности.
Что можно делать с роботом SCARA?
Робот
SCARA используется в высокоскоростных автоматизированных процессах сборки, требующих высокой повторяемости.
