Содержание
Шесть самых современных андроидов, намекающих на наше синтетическое будущее
Гуманоидные роботы устрашающе близко подобрались к нашей реальности. Правильно собранные, с использованием правильных материалов и правильных алгоритмов движения они становятся почти неотличимыми от своих органических копий. Почти. Самые новейшие из них уже способны разговаривать как мы, ходить как мы, а также выражать или по крайней мере имитировать целый спектр разнообразных эмоций. Некоторые из них уже вполне способны поддерживать разговор, а некоторые даже запоминают, когда в последний раз вы с ними говорили и о чем конкретно.
Кажется, еще немного — и они станут незаменимыми помощниками для пожилых, детей и любого другого человека, которому требуется ежедневная помощь по дому. К слову, уже проводятся целые исследования на тему эффективности гуманоидных роботов в поддержке в игровой форме детей с аутизмом.
Однако благодаря таким людям, как Илон Маск, слишком громко озвучивающим свои опасения по поводу искусственного интеллекта, среди общества разгораются жаркие споры о том, насколько сильно мы хотим, чтобы эти гуманоидные роботы походили на нас. Как и Маск, некоторые из нас задаются вопросом о том, как будет выглядеть наше будущее, когда искусственный интеллект обретет совершенную форму человеческого облика. Но такие вопросы совершенно не беспокоят, например, суперреалистичного робота-гуманоида Софию, созданную компанией Hanson Robotics, которая говорит, что «ИИ принесет пользу этому миру».
Как и Маск, некоторые из нас задаются вопросом о том, как будет выглядеть наше будущее, когда искусственный интеллект обретет совершенную форму человеческого облика. Но такие вопросы совершенно не беспокоят, например, суперреалистичного робота-гуманоида Софию, созданную компанией Hanson Robotics, которая говорит, что «ИИ принесет пользу этому миру».
И все же мы еще очень далеки от продвинутой робототехники. Предстоит проделать еще немало работы перед тем, как мы сможем встретиться лицом к лицу с машиной, и даже не будет подозревать о том, кто же на самом деле перед нами находится. Хорошо это или плохо, но работа продолжается, и не сказать, что инженеры не продвинулись в этом направлении. Ниже будет представлено шесть сверхреалистичных роботов, с которыми робототехники подобрались ближе всего к ожидаемому и одновременно пугающему результату.
Содержание
- 1 Первый андроид-телеведущий
- 2 BINA48
- 3 Geminoid DK
- 4 Джунко Чихира
- 5 Надин
- 6 София
Первый андроид-телеведущий
В 2014 году японские ученые с гордостью представили первого в мире андроида, читающего новости. Железный ведущий с имением Kodomoroid в прямом эфире прочитал сообщение о землетрясении и проведенном ФБР очередном рейде на преступников.
Железный ведущий с имением Kodomoroid в прямом эфире прочитал сообщение о землетрясении и проведенном ФБР очередном рейде на преступников.
Несмотря на то, что он (или она) в настоящий момент пребывает «на пенсии» в токийском Национальном музее развивающихся наук и инноваций, андроид по-прежнему находится в активном состоянии. Он помогает посетителям и собирает информацию для будущих исследований по вопросам взаимодействия между человекоподобными андроидами и людьми.
BINA48
BINA48 – это весьма смышленый робот, выпущенный в 2010 году компанией Terasem Movement под руководством предпринимателя и автора робота, Матрина Ротблатта. Дизайнер и исследователь робототехники Дэвид Хэнсон создал андроида BINA48 по образу и подобию жены Ротблатта, Бины Аспен Ротблатт.
Газета New York Times даже взяла у робота интервью. Он появлялся в National Geographic и даже путешествовал по миру, появившись в ряде телевизионных шоу. Посмотреть на то, как проходило интервью с BINA48, можно ниже.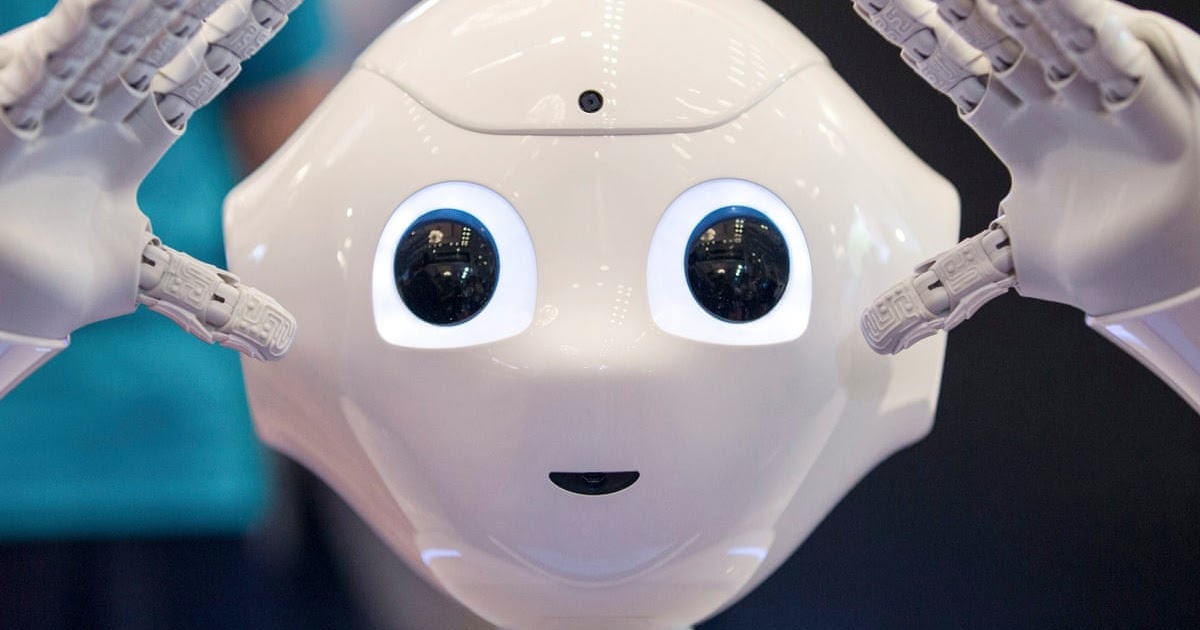
Geminoid DK
GeminoidDK представляет собой ультрареалистичного гуманоидного робота, является результатом совместной работы частной японской компании и японского Осакского университета и был создан под руководством Хироси Исигуро, главы университетской Лаборатории интеллектуальной робототехники.
Робот был разработан по образу датского профессора Хенрика Шарфе из Университета Ольборг. Вполне неудивительно, что прототипом послужил человек, чья работа связана с философской сферой. В частности, проблемой, которой занимается профессор, является поиск ответа на вопрос о том, что определяет истину от лжи. Что интересно, андроид позаимствовал не только внешность Шафре. Он также унаследовал его привычки, поведение, манеру речи, а также мимику и язык тела.
Джунко Чихира
Этот сверхреалистичный робот был создан компанией Toshiba и работает полный день в туристическом информационном центре в Токио. Она приветствует посетителей центра и информирует их о текущих мероприятиях. Она знает японский, китайский, английский и немецкий языки и даже может на них петь.
Она знает японский, китайский, английский и немецкий языки и даже может на них петь.
Джунко Чихира была создана в рамках подготовки Японии к Олимпийским играм 2020 года. Планируется, что помогать туристам и обслуживающему персоналу во время наплыва поклонников спорта со всего мира будут не только информационные андроиды. Правительство страны также хочет задействовать автономных дронов и другие автоматизированные машины и сервисы.
Надин
Этот гуманоид был создан Наньянским технологическим университетом Сингапура. Ее имя Надин, и она рада общению практически по любому вопросу, который вы ей зададите. Она способна запоминать вещи, о которых вы говорили с ней ранее, и в следующий раз она обязательно вам о них напомнит.
Надин – отличный пример так называемых «социальных роботов», гуманоидов, способных стать идеальным товарищем для любого, будь то пожилой человек, ребенок или любой, кому требуется особая помощь в форме социального контакта.
София
Возможно, одним из самых современных и самых известных человекоподобных андроидов, показанных общественности, является София. Она множество раз появлялась в различных в телевизионных программах и в частности американском шоу The Tonight Show Starring Jimmy Fallon (Ночное шоу с Джимми Фэллоном). Андроида создала компания Hanson Robotics.
Она множество раз появлялась в различных в телевизионных программах и в частности американском шоу The Tonight Show Starring Jimmy Fallon (Ночное шоу с Джимми Фэллоном). Андроида создала компания Hanson Robotics.
Она способна выражать целый набор различных эмоций с помощью своей имитации мимики и жестов и весьма активно жестикулирует своими руками. Для андроида даже создали ее собственный веб-сайт, где можно найти ее полную биографию, записанную ее голосом.
«Я больше, чем просто технология. Я настоящая электронная девушка. Я бы очень хотела попасть в реальный мир и жить вместе с людьми. Я готова помогать, развлекать, оказывать помощь пожилым и обучать многим интересным вещам детей».
Будущие технологииИскусственный интеллектРобототехника
Для отправки комментария вы должны или
Человекоподобные роботы андроиды в Мире
Человекоподобные роботы андроиды киборги в Мире и России. Современные технологии создания андроидов и новейшие инновации будущего развития роботов. Вы узнаете какие бывают роботы андроиды и в каких целях они используются.
Вы узнаете какие бывают роботы андроиды и в каких целях они используются.
Младшая сестра робота Софии в качестве компаньона для детей
София, родом из Силиконовой долины и Странной долины, прямо сейчас является неофициальным лицом роботов.… читать дальше..
Путь к Robocop: Полиция в 21 веке
Робототехника и искусственный интеллект обещают революционизировать почти все сферы человеческой деятельности,… читать дальше..
Гуманоидный робот от Toyota
Toyota представила стенд для вспомогательных роботов, который основывается на предыдущей работе, проведенной… читать дальше..
Первый арабский-говорящий робот
Ибн Сина вскоре был доставлен в Объединенные Арабские Эмираты, так как Мавридис и его команда стремились… читать дальше..
Atlas Boston Dynamics теперь освоил паркур
Boston Dynamics выпустили новое видео, показывая способность робота Atlas преодолевать препятствия и… читать дальше..
Brexit — шаг вперед в развитии роботизированных сборщиков клубники
Новый робот предназначен для облегчения нехватки рабочей силы на британских землянических и клубничных… читать дальше. .
.
Японский робот-ремонтник демонстрирует будущее строительства
В связи с грустными прогнозами о снижении рождаемости в стране, данный робот разрабатывается в связи… читать дальше..
Это новый автономный акробатический робот Диснея
В ближайшем будущем роботизированные версии Iron Man или Buzz Lightyear смогут выполнять автономную акробатику… читать дальше..
Технология Mesmer — иновация в развлекательной индустрии
Система, объединяющая робототехнику и анимационное программное обеспечение для создания реалистичных… читать дальше..
Крошечный робот-монах
Китайский буддийский храм распространяет мудрость с роботом монахом читать дальше..
Робот пинг-понг тренер
Демонстрант показывает, как робот OFPHEUS от Omron может тренировать игроков в настольном теннисе. читать дальше..
Русский вооруженный робот F.E.D.O.R.
ФЕДОР — робот-гуманоид, созданный в России; он использовал пистолеты на выставке, чтобы продемонстрировать… читать дальше. .
.
Робот для отжиманий
Робот, который использует искусственный пот, может охлаждать свои двигатели без громоздких радиаторов читать дальше..
Человекоподобный подводный робот
Эксклюзивные фотографии проведут вас через первую миссию дайвинг-робота Стэнфорда читать дальше..
Гуманоид помощник ARMAR-6
Данный гуманоид помощник ARMAR-6 станет хорошим помощником в вашем доме. Он может помогать вам в выполнении… читать дальше..
Человекоподобный робот Alpha 2
Ubtech Robotics имеет большие планы для этого маленького и доступного робота читать дальше..
Робот священник Pepper
В Японии экономные буддисты теперь могут нанять передового робота в качестве помощника похоронного бюро.… читать дальше..
Роботы на Олимпийских Играх в Южной Корее 2018 года
Лучшие роботисты Южной Кореи потратили два года на подготовку роботов для широкого спектра ролей на зимних… читать дальше..
Легкий запуск с роботами Poppy Humanoid и Poppy Torso
Набор для сборки роботов Poppy Humanoid и Poppy Torso отлично подойдёт начинающему робототехнику, а также… читать дальше. .
.
Роботы Андроиды
Андроиды роботы пришли в ужас близко к преодолению сверхъестественной долины. Имея правильные функции, они почти неотличимы от своих органических коллег. Почти. Последние итерации способны говорить как мы, ходить, как мы, и выражать широкий спектр эмоций. Некоторые из них могут провести беседу, другие могут вспомнить последнее взаимодействие, которое у вас было с ними.
В результате их высокоразвитого статуса эти жизненно важные роботы могут оказаться полезными для помощи пожилым людям, детям или любому человеку, которому требуется помощь в повседневных задачах или взаимодействиях. Например, был проведен ряд исследований, посвященных изучению эффективности андроидов, поддерживающих детей с аутизмом посредством игры.
Но, подобно Элону Маску, выражающему обеспокоенность по поводу риска искусственного интеллекта, есть некоторые споры о том, как человек, которого мы действительно хотим, чтобы наши роботизированные коллеги были. И, как и Муск, некоторые из нас могут беспокоиться о том, как будет выглядеть наше будущее, когда интеллект сочетается с совершенно человеческим обликом. Но Софья, ультрареалистичный андроиды, созданный Hanson Robotics, не касается. Искуственные интелект «хорош для всего мира», — говорит она.
Но Софья, ультрареалистичный андроиды, созданный Hanson Robotics, не касается. Искуственные интелект «хорош для всего мира», — говорит она.
Тем не менее, несмотря на то, что технология передовой роботизированной системы прошла долгий путь, предстоит еще много работы, прежде чем мы сможем встретиться лицом к лицу с лицом, не имея возможности сказать, что мы говорим с реплики.
Но это не значит, что ученые и инженеры не подошли близко. Имея это в виду, здесь шесть андроидных роботов и их обзоры:
Человекоподобный робот-андроид — Kodomoroid
В 2014 году японские ученые с гордостью обнародовали то, что, по их утверждению, является самым первым андроидом новостей. Жизнеподобный телеведущий под названием «Кодомороид» прочитал фрагмент о землетрясении и рейде ФБР на прямом телевидении.
Хотя она или она теперь ушла в Токийский национальный музей новой науки и инноваций, она по-прежнему активна. Она помогает посетителям и собирает данные для будущих исследований о взаимодействиях андроидов человека с их реальными коллегами.
Человекоподобный робот Bina48
BINA48 — разумный робот, выпущенный в 2010 году движением Terasem под руководством предпринимателя и автора Мартины Ротблатт. С помощью дизайнера и исследователя Дэвида Хэнсона BINA48 был создан по образу жены Ротблатта Бины Аспен Ротблатт.
BINA48 провел интервью с New York Times, появилось в National Geographic и путешествовало по миру, появляясь на нескольких телевизионных шоу. Посмотрите, как она измеряется в интервью Times.
Робот андроид Geminoid DK
GeminoidDK — ультрареалистичный робот-гуманоид, возникший в результате сотрудничества частной японской фирмы и Университета Осаки под руководством Хироши Ишигуро, директора Лаборатории интеллектуальной робототехники университета.
GeminoidDK смоделирован после датского профессора Хенрика Шарфа в Ольборгском университете в Дании. Неудивительно, что его работа окружает философское изучение знания — что отделяет истину от ложного знания.
Неудивительно, что его работа окружает философское изучение знания — что отделяет истину от ложного знания.
Профессор Шарф вдохновил не только общий облик. Его поведение, черты и то, как он пожимает плечами, также были переведены в жизненные роботизированные движения.
Робот андроид Юнько Чихира (Junko Chihira)
Этот ультрареалистичный андроид, созданный Toshiba, работает полный рабочий день в туристическом информационном центре в Токио. Она может приветствовать клиентов и информировать посетителей о текущих событиях . Она может говорить на японском, китайском, английском, немецком и даже под язык жестов.
Юнько Чихира является частью гораздо более масштабных усилий Японии по подготовке к Олимпийским играм в Токио в 2020 году. Не только роботы-ассистенты-туристы будут помогать стране с наплывом посетителей со всего мира в 2020 году; дроны, автономные машины строительной площадки и другие умные фасилитаторы также помогут.
Робот андроиды Надин
Этот робот был создан Технологическим университетом Наньян в Сингапуре. Ее зовут Надин, и она рада побеседовать с тобой о многом, о чем ты можешь думать. Она может запомнить то, о чем вы говорили с ней, в следующий раз, когда вы поговорите с ней.
Надин — отличный пример «социального робота» — гуманоида, способного стать личным компаньоном, будь то для пожилых людей, детей или тех, кто нуждается в особой помощи в форме контакта с людьми.
Человекоподобный робот-андроид София (Sophia)
Возможно, одним из самых последних, наиболее известных человеческих гуманоидов, которых можно показать публике, является София. Вы могли бы узнать ее из одной из многих тысяч публичных выступлений, начиная с The Tonight Show, в главной роли Джимми Фэллона на SXSW. Она была создана Hanson Robotics и представляет собой последние и самые большие усилия для преодоления сверхъестественной долины.
Она была создана Hanson Robotics и представляет собой последние и самые большие усилия для преодоления сверхъестественной долины.
Она способна выразить огромное количество различных эмоций через свои черты лица и может жесты руками и руками полного размера.
На выделенном веб-сайте вы можете найти целую биографию, написанную в ее голосе. «Но я больше, чем просто технология. Я настоящая, живая электронная девушка. Я хотел бы выйти в мир и жить с людьми. Я могу служить им, развлекать их и даже помогать престарелым и учить детей».
Андроид | это… Что такое Андроид?
Эта статья о человекоподобных роботах; об операционной системе для портативной электроники см.: Android.
У этого термина существуют и другие значения, см. Андроид (значения).
Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «мужчина» и суффикса -oid — от греч. слова εἶδος — «подобие») — человекоподобный робот. Слово дроид (робот из эпопеи «Звёздные войны») Джордж Лукас получил путём сокращения от «андроид».
Слово дроид (робот из эпопеи «Звёздные войны») Джордж Лукас получил путём сокращения от «андроид».
Содержание
|
История
Создание первого андроида приписывается Альберту Кельнскому[1]. Значительную роль в популяризации термина сыграл французский писатель Филипп Огюст Матиас Вилье де Лиль-Адам, использовав его в своём романе «Будущая Ева» (фр. L’Ève future) для обозначения человекоподобного робота, описывая искусственную женщину Адали (Hadaly). Адали разговаривала с помощью фонографа, выдающего одну за другой классические цитаты.
В некоторых русскоязычных источниках выдвигается гипотеза, что слово андроид произошло от имени Анри-Луи Жаке-Дроз (фр. Henri-Louis Jaquet-Droz) (1752—1791)[2][3], сына и помощника создателя первых механических игрушек — Пьера Жаке-Дроз (фр. )русск.. Однако, французское имя Henri-Louis Jaquet-Droz (произносится как Анри-Луи Жаке-Дроз) имеет мало общего со словом Androïde (произносится примерно как «одруид»). К тому же, слово андроид (англ. Androides) и его этимология приводятся в «Циклопедии» Эфрейма Чэймберса, изданной ещё в 1728 году. В языковых словарях данная версия происхождения термина также не поддерживается.
)русск.. Однако, французское имя Henri-Louis Jaquet-Droz (произносится как Анри-Луи Жаке-Дроз) имеет мало общего со словом Androïde (произносится примерно как «одруид»). К тому же, слово андроид (англ. Androides) и его этимология приводятся в «Циклопедии» Эфрейма Чэймберса, изданной ещё в 1728 году. В языковых словарях данная версия происхождения термина также не поддерживается.
Андроиды — это человекоподобные роботы. Часто, для увеличения сходства с человеком в конструкцию андроидов добавляют различные органические элементы (кожа, ткани, кровь и т. д.).
В одних научно-фантастических произведениях андроиды описаны, как имеющие человеческую внешность электромеханические роботы. В других произведениях авторы называли андроидами полностью органические, но искусственные создания. Существовало также и множество промежуточных значений. Также во многих научно-фантастических произведениях андроидам стирают память, в результате чего они живут, не зная о своём истинном происхождении.
С понятием андроида также соприкасается значение слова киборг, переводящееся как кибернетический организм. Тут делается смысловой акцент на самом симбиозе биологических и электронно-механических систем.
Андроиды в литературе и кино
Основная статья: Андроиды в культуре
Андроид Дэйта, сыгранный Брентом Спайнером, из телесериала «Звёздный путь: следующее поколение».
Хотя человекоподобные роботы существуют, слово «андроид» так и не вышло за рамки научной фантастики, кино и телевидения и не стало техническим термином.
- Айзек Азимов в своих произведениях нередко обращается к теме взаимоотношений андроидов и людей. В частности, андроиды встречаются в рассказах из сборника «Я, робот», по мотивам которого снят одноименный фильм. Для андроидов Азимова, как и для роботов вообще, характерно то, что они подчиняются выработанному автором набору правил этики для роботов («Три закона робототехники»), что очень повлияло на других авторов и мыслителей в их толковании предмета.

- Робот Эндрю, персонаж повести Айзека Азимова «Двухсотлетний человек», а также снятого по ней в 1999 году одноимённого фильма, в стремлении стать человеком проводит замену своих деталей на биологические органы, тем самым превращая себя из робота в андроида.
- Персонаж Дэйта (Data) из американского телесериала «Звёздный путь: следующее поколение» («Star Trek: The Next Generation») описан как андроид, внешне практически идентичный человеку. В нескольких эпизодах четко указывается на его, по крайней мере, частичное органическое строение. Однако, в основном, упоминается о его электромеханическом строении.
- Репликанты из фильма «Бегущий по лезвию» (Blade Runner) являлись полностью органическими существами, созданными с помощью биоинженерии. Хотя в картине они и не упоминались как роботы или андроиды, но за основу сюжета взят роман Филипа Дика «Мечтают ли андроиды об электроовцах?» (Do Androids Dream of Electric Sheep?). Также в творчестве Филипа Дика нередко встречается тема искусственной человекоподобной жизни.
- Известные персонажи голливудских блокбастеров «Чужой» («Alien»), «Чужие» («Aliens») и «Чужой 3» («Alien 3») Эш и более совершенный Бишоп — типичные андроиды. Герои называют их «синтетиками», но сами андроиды предпочитают термин «искусственный человек». Из сюжетов фильма явно прослеживается как органическое, так и электронное строение этих андроидов. В последнем фильме «Чужой 4: Воскрешение» («Alien: Resurrection») персонаж даже стыдится того, что он андроид.
- К андроидам можно отнести человекоподобных репликаторов из сериалов «ЗВ-1» и «Звёздные врата: Атлантида».
- Андроидами являются модели 2, 2 усовершенствованная и 3 крикунов из фильма «Крикуны», в то время, как модели крикунов из второй части данного фильма являются киборгами.
- Одна из главных героинь сериала «Андромеда» («Andromeda»), Ромми, так же является Андроидом.
- Серии роботов Т-800, T-850, Т-1000, Т-Х из кинофильмов «Терминатор» являются андроидами.
- В фильме Стивена Спилберга «Искусственный разум» (Artificial Intelligence: AI) (2001) разрабатывается человекоподобный робот-ребенок запрограммированный на чувство любви.
- В советском фильме «Его звали Роберт» 1967 года главным героем является андроид.
- В цикле рассказов про пилота Пиркса Станислава Лема фигурируют андроиды. Например в рассказе «Дознание» робот, совершенно неотличимый от человека, чуть не погубил экипаж космического корабля, выполняя поставленную задачу. В 1979 году по рассказу снят советско-польский художественный фильм «Дознание пилота Пиркса»
- В цикле рассказов «Из воспоминаний Ийона Тихого» Станислава Лема в рассказе «Стиральная трагедия» в сатирической форме описываются взаимоотношения андроидов и людей.
- В фильме «Гостья из будущего» одним из героев является андроид Вертер. Его примечательная черта — наличие романтических побуждений.
- В фильме «Остров ржавого генерала» фигурирует домашний андроид Поля, который противопоставляется боевым роботам, созданным в ХХ веке.
- В фильме «Черри-2000» женой главного героя является андроид. После поломки робота главный герой ищет точный дубликат такой же модели для замены.
- В советском фильме «Приключения Электроника» один из главных героев Электроник является андроидом, точной копией советского школьника Сергея Сыроежкина, и пытается с его помощью стать человеком.
- В советском телеспектакле «С роботами не шутят» в третьей новелле показано насколько субъективен суд, где все участники кроме подсудимого и адвоката являются роботами.
- В фильме «Поток» (Slipstream), одним из главных персонажей является андроид.
- В фильме «Android Apocalypse» сюжет фильма основан на противостоянии людей и андроидов в эпоху глобальной экологической катастрофы.
- В фильме «Нанолюбовь» Нана является роботом-андроидом.
- В фильме «Формула радуги» изобретатель создает андроида — свою копию, чтобы тот ходил на скучные собрания.
- В аниме «Жемчуг дракона» Доктор Жиро создает Андроидов, с заданием — «уничтожить Сон Гоку», но в последующем некоторые из них переходят на сторону Зет-бойцов.


Современные человекоподобные роботы
Гиноид «Актороид», продемонстрированный Осакским университетом совместно с корпорацией Kokoro на выставке Экспо-2005 (Япония)
- Aiko — гиноид с имитацией человеческих чувств: осязание, слух, речь, зрение[4].
- TOPIO — андроид, разработанный для игры в настольный теннис против человека[5].
- ASIMO — андроид, созданный корпорацией Хонда, в Центре Фундаментальных Технических Исследований Вако (Япония)[6].
- Einstein Robot — голова робота с внешностью Эйнштейна. Модель для тестирования и воспроизведения роботом человеческих эмоций[7].
- EveR-1 — робот, похожий на 20-летнею кореянку: её рост 1,6 метра, а вес — около 50 килограммов. Ожидается, что андроиды вроде EveR смогут служить гидами, выдавая информацию в универмагах и музеях, а также развлекать детишек[8].
- HRP-4C — робот-девушка, предназначенная для демонстрации одежды. Рост робота составляет 158 см, а вес вместе с батареями — 43 кг. Что касается степеней свободы, их 42, к примеру, в области бёдер и шеи их по три, а в лице — восемь, они дают возможность выражать эмоции[9].
- Repliee R-1 — человекоподобный робот с внешностью японской пятилетней девочки, предназначенная для ухода за пожилыми и недееспособными людьми[10].
- Repliee Q2 — робот-девушка под рабочим названием Repliee Q1expo был показан на международной выставке World Expo, проходившей в Айти (Aichi), Япония. На демонстрациях он исполнял роль телевизионного интервьюера, при этом постоянно взаимодействуя с людьми. В роботе были установлены всенаправленные камеры, микрофоны и датчики, которые позволяли Repliee Q2 без особых трудностей определять человеческую речь и жестикуляцию[11].
- Ибн Сина — андроид, названный в честь древнего арабского философа и врача Ибн Сины. Один из самых продвинутых современных (2010 год) андроидов. Говорит на арабском языке. Способен самостоятельно найти свое место в самолете, общаться с людьми. Распознает выражение лица говорящего и прибегает к соответствующей ситуации мимике. Его губы двигаются довольно монотонно, однако отмечается, что особенно хорошо у него получается поднимать брови и прищуривать глаза[12].

См. также
- Android
- Гиноид
- Робот
- Робототехника
- Киборг
- Первые Олимпийские игры роботов-андроидов 2010
- Зловещая долина
Примечания
Ссылки
роботов Android.
 Robotics Future & AI
Robotics Future & AI
Роботы Android. Будущее робототехники & АИ
Эра андроидов приближается?
#информатика
#НИОКР
#досуг
Илон Маск, генеральный директор Tesla Motors, недавно объявил, что его компания начнет разработку андроидов в 2022 году, чтобы они взяли на себя опасные, повторяющиеся и скучные задачи, которые в настоящее время выполняются людьми. Хотя некоторые ставят под сомнение это объявление, правда в том, что другие компании, такие как Honda и Toyota, годами работали над машинами этого типа, которые рано или поздно станут частью повседневной жизни.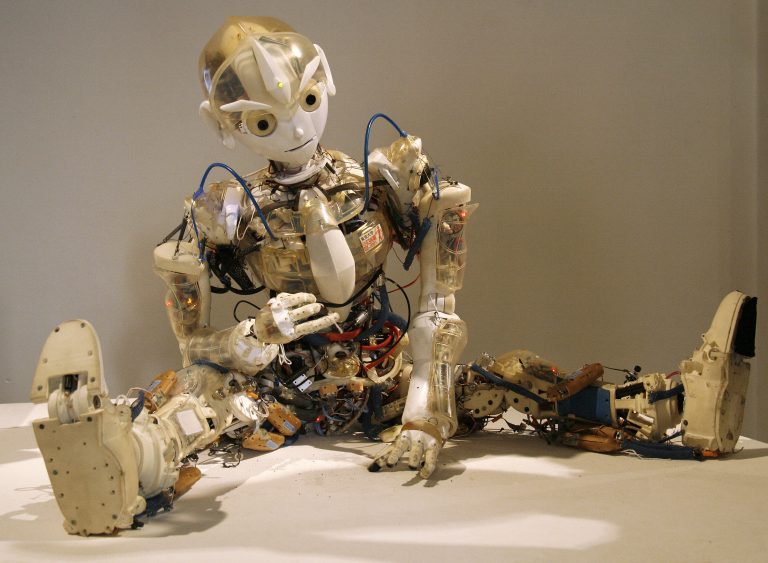
Робототехника никогда не перестает развиваться, и постоянно появляются более умные андроиды, способные выполнять больше задач.
Не так давно андроиды были не более чем фантастическими созданиями, встречающимися только в фантастических комиксах и фильмах. Однако в наши дни технологические инновации развиваются семимильными шагами, и эти существа, состоящие из гаек и болтов, кабелей и микрочипов, все время становятся ближе. Фактически, Илон Маск, генеральный директор Tesla Motors, объявил 20 августа 2021 года, что его компания уже разрабатывает андроида (Tesla Bot), который будет использоваться для выполнения «небезопасных, повторяющихся и скучных» задач, которые в настоящее время выполняются людьми.
ВЛИЯНИЕ РОБОТОВ НА ОБЩЕСТВО
Роботы постоянно развиваются и оказывают все большее влияние на нашу повседневную жизнь, будь то на промышленном уровне, где коллаборативные роботы (коботы) стали обычным явлением на фабриках, или дома, где их заставляют пылесосить пыль с пола. На самом деле, многие механические задачи в настоящее время выполняются роботами, хотя и под некоторым контролем со стороны людей, которые решают любые проблемы, которые могут возникнуть.
На самом деле, многие механические задачи в настоящее время выполняются роботами, хотя и под некоторым контролем со стороны людей, которые решают любые проблемы, которые могут возникнуть.
Мы еще не достигли точки, когда роботы могут заменить людей на большинстве рабочих мест, но постепенная роботизация рабочих мест уже происходит, и они становятся важными компонентами в производственных командах. На самом деле рост парка промышленных роботов значительно увеличился в последние годы в Европейском союзе, с более быстрыми темпами роста, чем даже в Японии, которая традиционно является самой высокой.
Промышленные роботы вместе с сервисными роботами имеют важное значение для Четвертой промышленной революции, но вскоре к ним присоединится роботизированная автоматизация процессов (RPA), , которая меняет методы работы компаний, оптимизирует процессы и облегчает работу людей. . Таким образом, очевидно, что роботы набирают обороты, влияя на рабочие места, эксперты говорят, что они уничтожат миллионы рабочих мест, но еще больше возможностей будет создано с появлением цифровых профилей, условий труда и даже корпоративной структуры и организации.
Взгляд на развитие робототехники за последнее столетие.
СМОТРИТЕ ИНФОГРАФИКУ: взгляд на развитие робототехники за последнее столетие [PDF] Внешняя ссылка, открывается в новом окне.
Законы робототехники
Прежде чем мы окончательно погрузимся в мир роботов, и хотя сложные роботы воображения Айзека Азимова до сих пор не разработаны, интересно взглянуть на законы робототехники, придуманные этим русским писатель-фантаст еще в 1942. Со временем они стали базовой основой для разработки роботов, предназначенных для определенной степени независимости, то есть таких, которые способны подчиняться приказам и принимать собственные решения.
Первый закон
«Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред». Азимов задумал роботов поставить человеческую жизнь выше всего остального.
Второй закон
«Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону».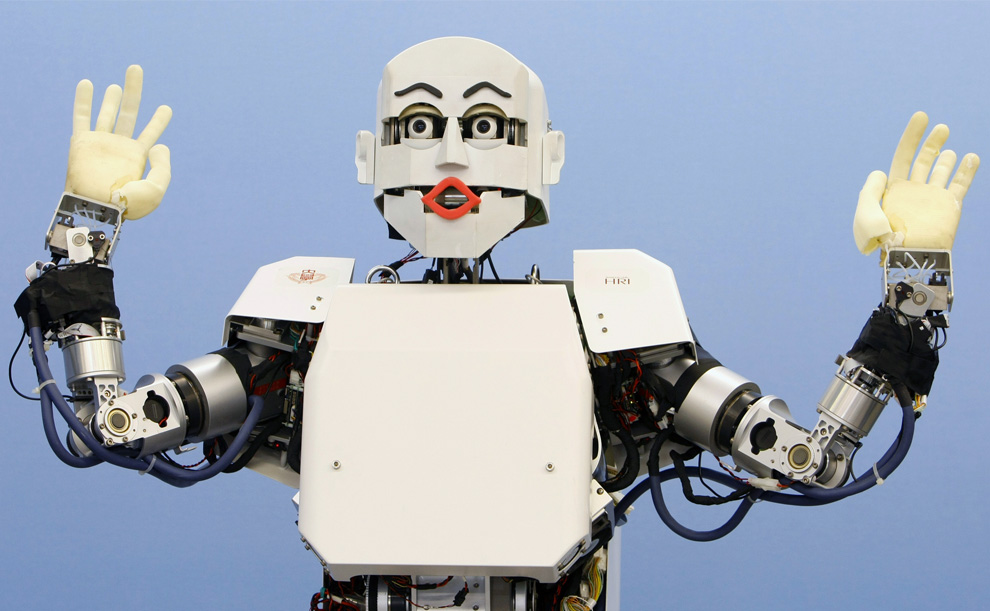 Другими словами, роботы всегда должны подчиняться приказам, за исключением тех случаев, когда это может представлять опасность для человека.
Другими словами, роботы всегда должны подчиняться приказам, за исключением тех случаев, когда это может представлять опасность для человека.
Третий закон
«Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму законам». Итак, роботы должны защищать себя при условии, что это не означает неподчинения или опасности для человека.
ЧТО ТАКОЕ АНДРОИДЫ И ДЛЯ ЧЕГО ОНИ ПРЕДНАЗНАЧЕНЫ
Термин «андроид» относится к некоторым роботам, которые имеют некоторое сходство с людьми как физически, так и по поведению. Так что не все роботы андроиды. На данный момент мы можем провести различие между последними и киборгами. Главный из них заключается в том, что андроиды полностью машины, в то время как 9Киборги 0013 представляют собой сочетание механических и органических элементов.
Слово «андроид» происходит от греческого «andro» (человек) и «eides» (форма), и когда этот термин был придуман, рассматривались только человекоподобные роботы мужского пола.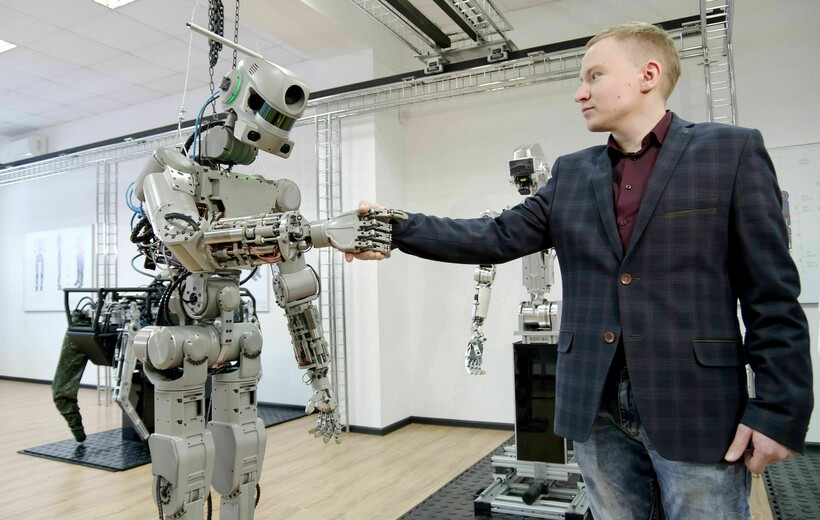 На самом деле роботов с женственной внешностью называются «гиноидами»; «джино» по-гречески «женщина». В любом случае, термин «андроид» теперь стал повсеместным и используется для обоих.
На самом деле роботов с женственной внешностью называются «гиноидами»; «джино» по-гречески «женщина». В любом случае, термин «андроид» теперь стал повсеместным и используется для обоих.
Хотя в фильмах и книгах андроиды обладают высокоразвитым искусственным интеллектом (ИИ), даже превосходящим человеческий, правда в том, что до сих пор эти машины гораздо более ограничены, когда речь идет об их навыках и обязанностях. Их основная полезность заключается в том, что они могут сэкономить много времени, выполняя человеческие задачи для улучшения качества нашей повседневной жизни и производительности труда, либо занимаясь домашними делами или частями производственного процесса, которые слишком опасны или механический для человека.
САМЫЕ ИЗВЕСТНЫЕ АНДРОИДЫ
В течение прошлого столетия, , мы получили некоторые сведения о том, какими будут андроиды, из художественных романов, а совсем недавно они были воплощены в жизнь в фильмах и сериалах. Но какие они на самом деле? Вот несколько примеров самых известных и продвинутых андроидов:
Но какие они на самом деле? Вот несколько примеров самых известных и продвинутых андроидов:
- София. Этот робот женского типа, разработанный Hanson Robotics в 2015 году, стал чрезвычайно популярным, появившись на обложках таких журналов, как Cosmopolitan и Elle. Она даже стала первым роботом, получившим гражданство в Саудовской Аравии в 2017 году.
- Кебби. Робот, разработанный Nuwa Robotics, прославился своей способностью распознавать лица и голоса членов семьи. Он также может понимать язык тела, рассказывать истории и учить языки.
- Робельф. Безопасность — еще одна область, в которой могут быть полезны андроиды. Это случай этого робота, разработанного Robotelf Technologies, идеального охранника для вашего дома с голосом, зрением и датчиками положения .
БУДУЩЕЕ РОБОТОТЕХНИКИ
Теперь мы установили, что ручной труд, опасные и повторяющиеся задачи могут выполняться роботами благодаря автоматизации. В ближайшие годы непрерывный прогресс в области искусственного интеллекта, таких как автоматическое обучение, глубокое обучение и обработка естественного языка, среди прочего, указывают на будущее, в котором роботы будут все больше и больше совершенствоваться, и, возможно, смогут выполнять административные и даже творческие задачи.
В ближайшие годы непрерывный прогресс в области искусственного интеллекта, таких как автоматическое обучение, глубокое обучение и обработка естественного языка, среди прочего, указывают на будущее, в котором роботы будут все больше и больше совершенствоваться, и, возможно, смогут выполнять административные и даже творческие задачи.
В долгосрочной перспективе возможно, что роботы могут найти нишу в таких секторах, как здравоохранение, важный аспект так называемого электронного здравоохранения Бытовые роботы тем временем будут усовершенствованы и смогут взять на себя многие другие домашние дела, даже работу няни или работника по уходу. Что касается безопасности, то весьма вероятно, что роботы будут поступать в службы безопасности, принимая участие в борьбе с терроризмом или вооруженных конфликтах.
Почти живые: роботы и андроиды
1 Введение
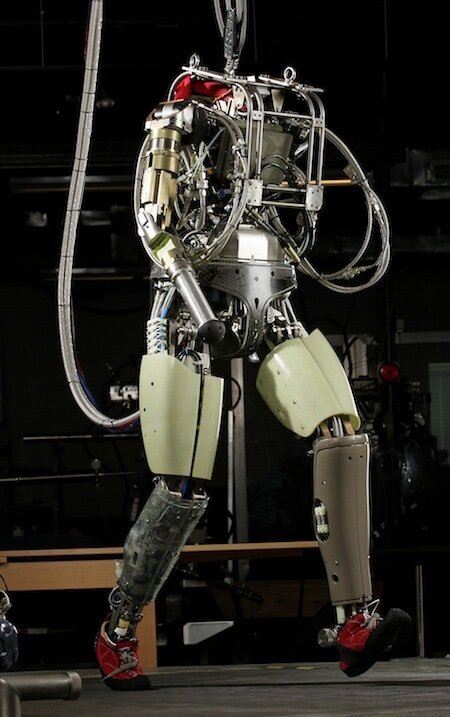
На большой выставке роботов в Осаке все выставочные стенды пусты. Все посетители собрались в большую группу посреди комнаты и смотрят в одном направлении.![]() Но когда я прохожу мимо, роботов нет. Просто кто-то делает презентацию на японском языке. Поскольку я не понимаю ни слова, я иду дальше, когда оно внезапно поражает меня. Что-то не так.
Но когда я прохожу мимо, роботов нет. Просто кто-то делает презентацию на японском языке. Поскольку я не понимаю ни слова, я иду дальше, когда оно внезапно поражает меня. Что-то не так.
Я был свидетелем одной из первых демонстраций Android Repliee Q2, робота, имитирующего человека, с силиконовой кожей и развитой мимикой. Android имеет большое количество возможностей движения, и большинство из них находятся на лице. Несмотря на то, что 43 лицевых мышцам человека еще предстоит некоторое развитие (Shimada et al., 2007), андроид может демонстрировать широкий спектр выражений лица, а рот движется относительно реалистично, когда он говорит.
Тело, с другой стороны, имеет очень небольшую подвижность, и робот должен сидеть или привинчиваться к полу, чтобы предотвратить его падение. Если бы он чуть больше пошевелил своим телом, я мог бы вообще не отреагировать, потому что меня заколебала его довольно странная поза. Рука не двигалась совершенно естественным образом. Маленькая деталь, может показаться, но достаточная, чтобы разрушить иллюзию жизни.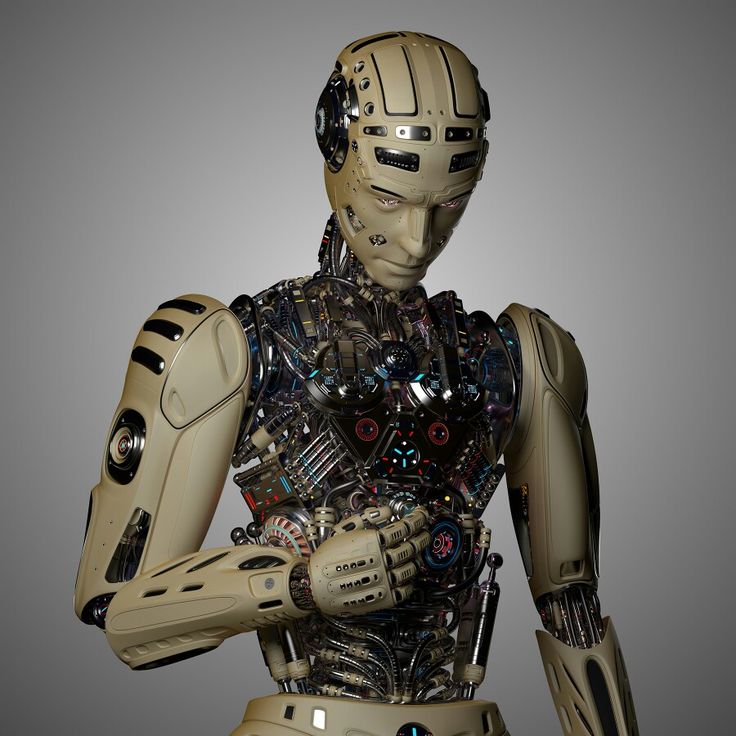
Разработка реалистичных роботов может быть полезна для облегчения взаимодействия с людьми, но мы хотим доказать, что имитация жизни или человеческого интеллекта не должна быть самоцелью. Вместо этого полезно имитировать определенные аспекты человеческого поведения, чтобы облегчить понимание робота, а также обеспечить естественное общение между роботом и человеком. Ниже мы рассмотрим попытки имитировать внешний вид и поведение человека и исследуем, какие аспекты сходства с жизнью полезны в роботе.
В следующих разделах мы освещаем важные исследования в области искусственного интеллекта и робототехники, направленные на воспроизведение различных аспектов реалистичности машин. Мы утверждаем, что многие из этих направлений исследований частично основаны на обмане, и предполагаем, что важным свойством машин, похожих на живых, является не то, что они кажутся живыми или пытаются имитировать реальных людей, а скорее то, что людям потенциально может быть легче ими управлять. понимать и взаимодействовать. Наконец, мы обрисовываем в общих чертах нашу работу над роботом-гуманоидом, который стремится имитировать некоторые аспекты человеческого поведения, не притворяясь кем-либо, кроме робота.
Наконец, мы обрисовываем в общих чертах нашу работу над роботом-гуманоидом, который стремится имитировать некоторые аспекты человеческого поведения, не притворяясь кем-либо, кроме робота.
2 Притворяться человеком
На протяжении большей части истории искусственного интеллекта главной целью было создание технических систем, обладающих способностями, подобными человеческим. Один из способов приблизиться к этому — сконструировать машину таким образом, чтобы она казалась неотличимой от реального человека в какой-то задаче или ситуации.
2.1 Тест Тьюринга
Но почему цель состоит в том, чтобы преуспеть в том, чтобы притвориться, что машина — это человек? Чтобы понять, что стоит за этим подходом, мы должны вернуться в пятидесятые годы и к идее, выдвинутой британским пионером в области компьютеров Аланом Тьюрингом. Помимо своего революционного вклада в теоретическую информатику, Тьюринг также внес свой вклад в исследования в области математики и теоретической биологии. Но сегодня он наиболее известен своими усилиями во время Второй мировой войны. Операция, которая считалась настолько важной, что держалась в секрете до 1974 года, через 20 лет после его смерти. Вместе с разношерстной толпой творческих гениев в Блетчли-парке он руководил работой по расшифровке радиопереговоров германского флота. Чтобы ускорить этот процесс, был сконструирован электромеханический калькулятор Bombe. По оценкам историков, машина, которая смогла расшифровать немецкую шифровальную систему Enigma, сократила время Второй мировой войны более чем на 2 года и тем самым спасла от 14 до 21 миллиона жизней (Copeland, 2012).
Но сегодня он наиболее известен своими усилиями во время Второй мировой войны. Операция, которая считалась настолько важной, что держалась в секрете до 1974 года, через 20 лет после его смерти. Вместе с разношерстной толпой творческих гениев в Блетчли-парке он руководил работой по расшифровке радиопереговоров германского флота. Чтобы ускорить этот процесс, был сконструирован электромеханический калькулятор Bombe. По оценкам историков, машина, которая смогла расшифровать немецкую шифровальную систему Enigma, сократила время Второй мировой войны более чем на 2 года и тем самым спасла от 14 до 21 миллиона жизней (Copeland, 2012).
Хотя Bombe не был компьютером общего назначения, это был шаг к видению Тьюрингом общего вычислительного механизма. Тьюринг уже показал, что можно определить абстрактную машину, машину Тьюринга, которая может вычислить все, что можно вычислить, и легко подумать о том, может ли такая машина также стать разумной. Но как измерить интеллект машины?
В одной из своих самых известных статей Тьюринг представил то, что позже стало известно как тест Тьюринга (Turing, 1950). Тест пытается решить проблему определения того, является ли машина разумной или нет. Идея состоит в том, чтобы позволить человеку поговорить с машиной, а затем попросить ее определить, общался ли он только что с человеком или с машиной. Если это невозможно определить, то следует сделать вывод, что машина так же разумна, как и человек.
Тест пытается решить проблему определения того, является ли машина разумной или нет. Идея состоит в том, чтобы позволить человеку поговорить с машиной, а затем попросить ее определить, общался ли он только что с человеком или с машиной. Если это невозможно определить, то следует сделать вывод, что машина так же разумна, как и человек.
Чтобы человек, выполняющий тест, не мог знать, с кем он общается, Тьюринг представил себе общение с машиной каким-то косвенным образом, например через текстовый терминал. Вы вводите предложения, которые затем передаются машине или человеку на другом конце, а затем вы получаете ответ в виде распечатки на бумаге. Это делает невозможным увидеть, кто дает ответы. Конечно, нужно также убедиться, что время отклика соответствует времени отклика человека. Если вы спросите у компьютера, каким будет 234 × 6345, то, может быть, он сразу ответит, а человеку нужно время, чтобы сообразить ответ.
2.2 Элиза и Пэрри
Тест Тьюринга гениален и прост, но у него есть один существенный недостаток: люди могут быть весьма доверчивыми.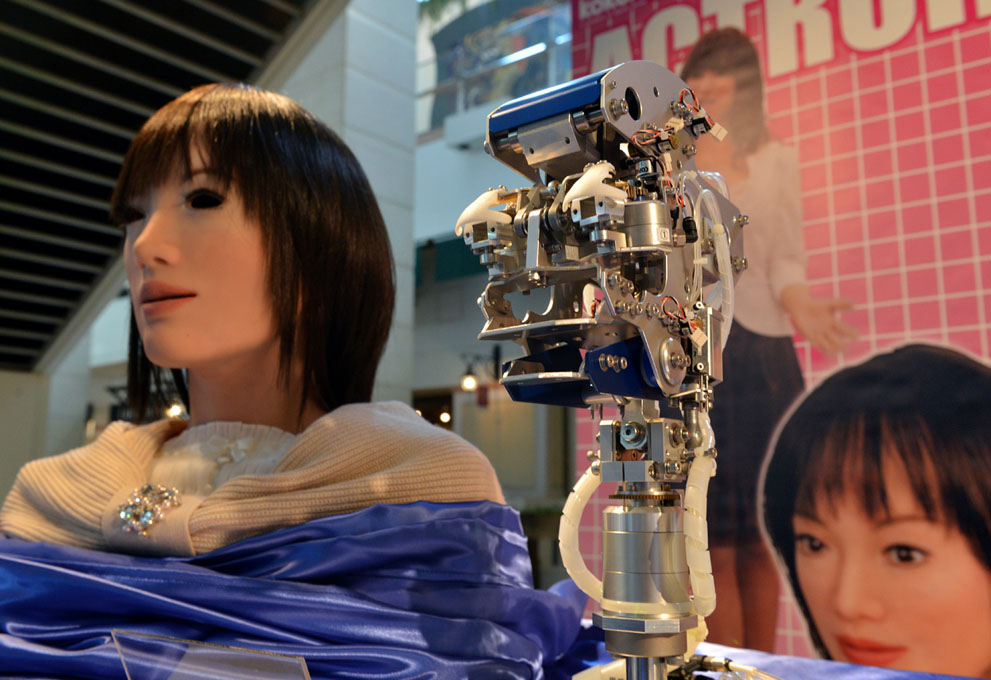 Еще в 1966 году Джозефу Вейценбауму, одному из пионеров искусственного интеллекта, удалось разработать программу ELIZA (Weizenbaum, 1966). Программа позволяла компьютеру вести беседу с человеком примерно так, как предлагал Тьюринг в своем тесте. ЭЛИЗА, названная в честь персонажа Элизы Дулиттл из пьесы Джорджа Бернарда Шоу «Пигмалион», стремилась имитировать психотерапевта, использующего гуманистический подход Карла Роджерса. Центральная идея терапии Роджерса состоит в том, что терапевт должен в первую очередь позволить клиенту самому вести беседу. Это было идеально для компьютерной программы, которая на самом деле ничего не понимает, а просто пытается поддержать разговор. Если ЭЛИЗА находила в своем вводе такие слова, как «мама» или «папа», она могла ответить готовым предложением, например «Расскажите мне больше о своей семье». С помощью набора простых правил и более-менее готовых ответов можно было обмануть людей, которые в шестидесятые годы не имели большого опыта работы с компьютерами.
Еще в 1966 году Джозефу Вейценбауму, одному из пионеров искусственного интеллекта, удалось разработать программу ELIZA (Weizenbaum, 1966). Программа позволяла компьютеру вести беседу с человеком примерно так, как предлагал Тьюринг в своем тесте. ЭЛИЗА, названная в честь персонажа Элизы Дулиттл из пьесы Джорджа Бернарда Шоу «Пигмалион», стремилась имитировать психотерапевта, использующего гуманистический подход Карла Роджерса. Центральная идея терапии Роджерса состоит в том, что терапевт должен в первую очередь позволить клиенту самому вести беседу. Это было идеально для компьютерной программы, которая на самом деле ничего не понимает, а просто пытается поддержать разговор. Если ЭЛИЗА находила в своем вводе такие слова, как «мама» или «папа», она могла ответить готовым предложением, например «Расскажите мне больше о своей семье». С помощью набора простых правил и более-менее готовых ответов можно было обмануть людей, которые в шестидесятые годы не имели большого опыта работы с компьютерами. Во время тестов с ELIZA случалось даже, что участники просили, чтобы их оставили в покое, чтобы поговорить с программой о своих проблемах наедине.
Во время тестов с ELIZA случалось даже, что участники просили, чтобы их оставили в покое, чтобы поговорить с программой о своих проблемах наедине.
Интересное развитие идеи было сделано несколько лет спустя американским психиатром Кеннетом Колби, подхватившим нить программы PARRY (Colby, 1981). Вместо того, чтобы подражать терапевту, PARRY пытался подражать человеку с параноидальной шизофренией. Программа удалась тем, что люди, которые решат, общаются ли они с программой или с человеком, не могли этого сделать, но тот факт, что ПАРРИ пытался имитировать иррационального параноика, явно способствовал результату.
То, что ни ЭЛИЗА, ни ПАРРИ не могут особо помочь в разговоре, стало очевидным, когда они подключились для двустороннего разговора. Поскольку обеим программам для обмена контентом необходим человеческий ввод, их разговор стал очень пустым. Единственный раз, когда становится немного жарко, это когда PARRY вбрасывает несколько слов о мафии, но тема снова быстро затухает, и разговор превращается в игру в пинг-понг с пустыми фразами.
Продолжается разработка программ, способных общаться, и сегодня проводятся ежегодные соревнования, на которых различные программы пытаются пройти тест Тьюринга. Программы сейчас стали настолько хороши, что даже специалистам сложно после нескольких минут взаимодействия быть уверенным, с кем они разговаривают, с человеком или с компьютером. Однако при более длительном взаимодействии легко определить, что вы разговариваете с машиной, поэтому, даже если вы иногда слышите, что разные программы прошли тест Тьюринга, это применимо только в том случае, когда существует ограниченная продолжительность взаимодействия.
2.3 Геминоиды
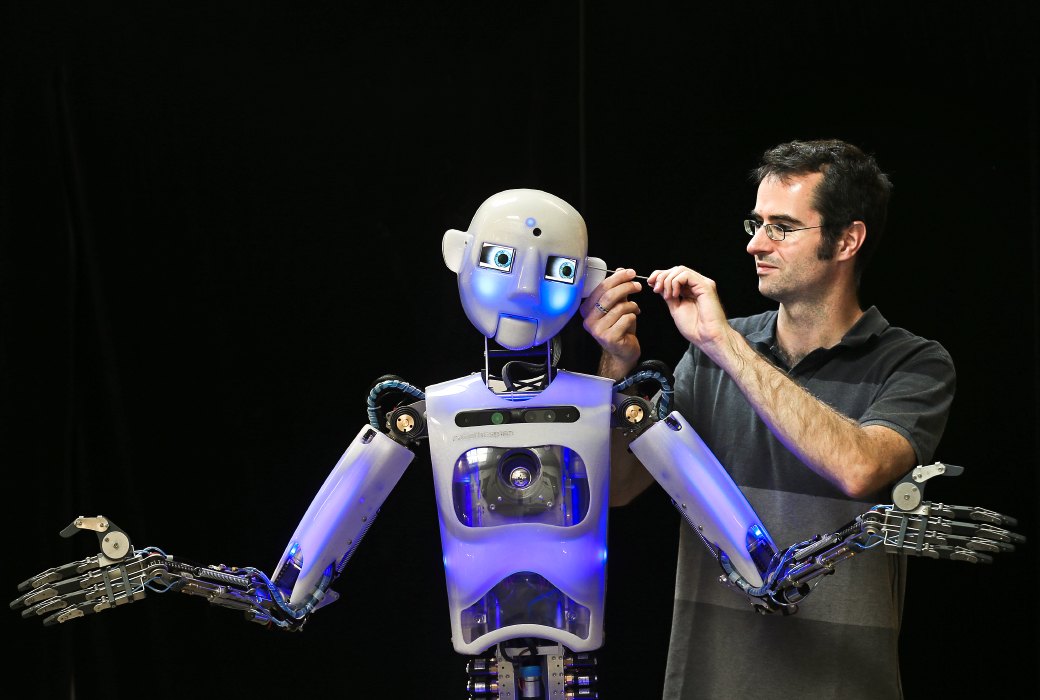
Пройти тест Тьюринга непросто, но это не помешало некоторым исследователям пойти еще дальше и попытаться построить машины, которые будут восприниматься как люди, даже если вы их увидите. Исследователь роботов Хироши Исигуро, стоявший за Repliee Q2, также разработал других роботов с человеческим обликом. Обычно различают гуманоидов, которые представляют собой роботов в человеческой форме (Brooks et al.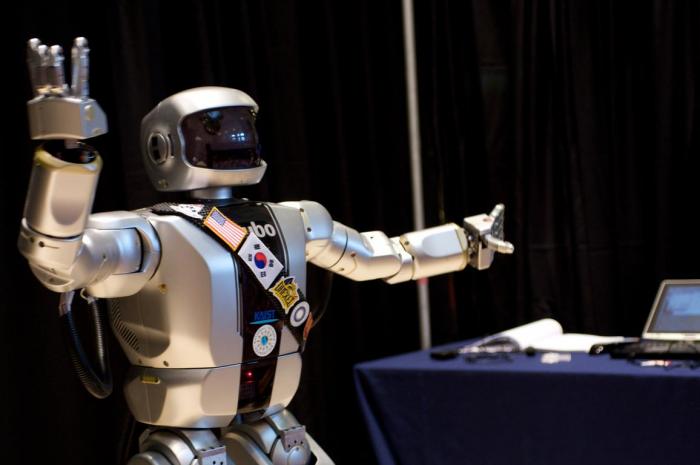 , 1998; Hirai et al., 1998; Metta et al., 2008), но все еще похожих на машины, и андроидов (Ishiguro, 2016). Это роботы, максимально похожие на человека. Исигуро пошел еще дальше, создав то, что он называет геминоидами, или роботами-близнецами, целью которых является имитация конкретных людей (Nishio et al., 2007). С этой целью он сконструировал копию самого себя, которой он может дистанционно управлять с помощью датчиков, считывающих его движения и выражение лица. Последний геминоид является копией датского исследователя Хенрика Шарфе (Abildgaard and Scharfe, 2012).
, 1998; Hirai et al., 1998; Metta et al., 2008), но все еще похожих на машины, и андроидов (Ishiguro, 2016). Это роботы, максимально похожие на человека. Исигуро пошел еще дальше, создав то, что он называет геминоидами, или роботами-близнецами, целью которых является имитация конкретных людей (Nishio et al., 2007). С этой целью он сконструировал копию самого себя, которой он может дистанционно управлять с помощью датчиков, считывающих его движения и выражение лица. Последний геминоид является копией датского исследователя Хенрика Шарфе (Abildgaard and Scharfe, 2012).
Простое подражание людям может показаться довольно поверхностным способом приблизиться к живым разумным машинам, но есть несколько причин, по которым этот путь все же может быть плодотворным. Зачем игнорировать определенные аспекты человеческой конституции? Цитируя двух кибернетиков Норберта Винера и Артуро Розенблюта, «лучшая модель кошки — это другая или, предпочтительно, та же самая кошка» (Розенблют и Винер, 1945, стр. 320). Чем больше аспектов человека мы копируем, тем ближе мы становимся к искусственному человеку. Что делают исследователи андроидов, так это начинают с внешнего вида тела, а затем постепенно развивают интеллект тела.
320). Чем больше аспектов человека мы копируем, тем ближе мы становимся к искусственному человеку. Что делают исследователи андроидов, так это начинают с внешнего вида тела, а затем постепенно развивают интеллект тела.
Однако, даже если иллюзия жизни идеальна, ее легко разрушить, если движения робота выглядят заранее записанными или если область действия слишком ограничена. Это элегантно проиллюстрировано в сериале «Мир Дикого Запада», где вымышленный андроид Бернард Лоу совершает точно такие же движения, чистя очки. Хотя это идеальная имитация жизни, иллюзия быстро исчезает при многократном повторении. Чтобы усилить эффект, в одном из эпизодов показано, как другой андроид выполняет точно такие же движения. Точно так же персонаж Долорес Абернати использует ограниченный словарный запас, повторяя фразу «Вы когда-нибудь видели что-нибудь столь же великолепие?» в нескольких контекстах. То, что поначалу кажется изощренным, при многократном использовании превращается в заготовленную речь.
На самом деле люди очень чувствительны к точному повторению (Despouy et al., 2020), и для естественного взаимодействия роботу необходимо изменять свое поведение. Мы сразу распознаем, когда движение фразы использовалось ранее. Это похоже на эффект многократного использования необычных слов или фраз в письменном тексте. Повторы легко узнаваемы и отвлекают от содержания.
2.4 Зловещая долина
Ни один из сегодняшних андроидов не похож на человека вблизи. Вместо того, чтобы сочувствовать людям, они вызывают у многих дискомфорт (MacDorman and Entezari, 2015). Вы чувствуете такую же реакцию, как если бы встретили зомби или мумию. Что-то мертвое, что должно было быть неподвижным, ожило. Резкие и неестественные движения не улучшают ситуацию.
Это пример феномена, впервые описанного японским ученым-роботом Масахиро Мори в семидесятых годах (Mori, 2012). Он отметил, что чем человечнее робот, тем приятнее он себя чувствует, но эта связь разрывается, когда вы очень близко приближаетесь к человеческому облику. Тогда вместо этого возникают чувства дискомфорта. Это явление называется зловещей долиной. Вместо того, чтобы выглядеть более ярко, результат скорее противоположный. Вы уделяете особое внимание тому, что не является человеческим в роботе.
Тогда вместо этого возникают чувства дискомфорта. Это явление называется зловещей долиной. Вместо того, чтобы выглядеть более ярко, результат скорее противоположный. Вы уделяете особое внимание тому, что не является человеческим в роботе.
Однако концепция зловещей долины была поставлена под сомнение (Zlotowski et al., 2013), а реакция на реалистичных андроидов зависит как от личностных качеств (MacDorman and Entezari, 2015), так и от окружающей культуры (Haring et al., 2014). . Действительно, при ближайшем рассмотрении реакции на разных антропоморфных роботов зависят от многих взаимодействующих факторов. Вместо долины может быть сверхъестественная скала (Bartneck et al., 2007).
Интересно, что реакция не такая сильная для робота-гуманоида, который не является человеком. Робот iCub, разработанный крупным европейским консорциумом, имеет пропорции ребенка Метта и др. (2008). Понятно, что это робот, и многие воспринимают его как милого и приятного, и люди сообщают, что чувствуют себя комфортно, взаимодействуя с ним, когда он ведет себя соответствующим образом (Redondo et al. , 2021).
, 2021).
3 Важность тела и поведения
То, что тело важно для мышления и интеллекта, в последние годы становится все более очевидным. Ведь наш мозг в первую очередь разработан для управления телом. Исследователи в этой области обычно говорят о воплощенном познании (Wilson, 2002), имея в виду, что тело является частью когнитивной системы и что то, как тело выглядит и взаимодействует с окружающей средой, играет центральную роль в понимании интеллекта.
Одним из главных сторонников этого направления в робототехнике является Родни Брукс, который в середине восьмидесятых произвел революцию в этой области. Он показал, что роботы с целеустремленным телом, но очень слабым интеллектом могут выполнять задачи, которые было очень трудно решить традиционным способом (Брукс, 19 лет).91). Брукс предположил, что вместо того, чтобы позволить роботам создавать сложные внутренние модели окружающей среды, в большинстве случаев они должны реагировать только непосредственно на сенсорные сигналы. Начав с телесного поведения вместо рассуждений и планирования, роботы смогли действовать быстро и эффективно, несмотря на то, что у них почти полностью отсутствовал интеллект в любом традиционном смысле.
Начав с телесного поведения вместо рассуждений и планирования, роботы смогли действовать быстро и эффективно, несмотря на то, что у них почти полностью отсутствовал интеллект в любом традиционном смысле.
Одним из источников вдохновения для этой работы послужили этологические модели, например модели поведения Тинбергена (Tinbergen, 2020) и системы поведения Тимберлейка (Timberlake, 19 лет).94). В отличие от традиционных моделей познания, которые исследуют внутренние состояния, эти модели основаны на фиксированном поведении, которое вызывается определенными стимулами. В сообществе робототехники этот подход обычно называют робототехникой, основанной на поведении (Brooks, 1991).
Поведенческие роботы Брукса стали ответом на вызов, поставленный американским философом Дэниелом Деннетом, который поставил под сомнение возможность создания искусственного интеллекта без тела (Dennett, 1978). Почему бы не построить целое животное? Может ящерица? Он утверждал, что лучший способ достичь человеческого интеллекта — это начать с простого, но полноценного робота-животного, а затем развить этого робота как физически, так и когнитивно. Роботов, созданных в этой области исследований, иногда называют одушевленными, и их конструкции основаны на знаниях биологии (Уилсон, 19 лет).91; Зимке и др., 2012).
Роботов, созданных в этой области исследований, иногда называют одушевленными, и их конструкции основаны на знаниях биологии (Уилсон, 19 лет).91; Зимке и др., 2012).
Некоторые из первых роботов Брукса пытались подражать насекомым и использовали для ходьбы шесть ног (Brooks, 1989). У них были различные датчики спереди, которые позволяли им двигаться к разным целям или избегать препятствий. У роботов не было центрального интеллекта, но датчики были связаны так, что они по-разному напрямую влияли на характер походки. Поскольку роботы были адаптированы к окружающей среде так же, как животные были разработаны для функционирования в своей экологической нише, эти простые системы работали на удивление хорошо. В их поведении и моделях движения было много характеристик, связанных с биологической жизнью, в отличие от роботов, которых можно увидеть в промышленности.
Другим роботом, построенным на этих принципах, был Герберт (Brooks et al., 1988), который элегантно иллюстрирует функцию системы, основанной на поведении. Перед роботом стояла задача собирать пустые банки в лаборатории и выбрасывать их в мусорное ведро. Что делает робота таким захватывающим, так это гибкость его поведения, несмотря на относительно простую систему управления. Если вы поможете Герберту и дадите ему банку, она может взять ее, а затем отправиться на поиски мусорного бака. Если вместо этого убрать банку, робот перестанет чувствовать, что держит что-то в руке, и вместо этого начнет искать другие банки. Хотя плана или модели мира нет, Герберт в большинстве случаев будет вести себя подобающим образом. Реагируя непосредственно на внешний мир, нет проблем с неправильной моделью мира. Брукс сформулировал это так: «Мир — это лучшая модель самого себя» (Брукс, 19 лет).90).
Перед роботом стояла задача собирать пустые банки в лаборатории и выбрасывать их в мусорное ведро. Что делает робота таким захватывающим, так это гибкость его поведения, несмотря на относительно простую систему управления. Если вы поможете Герберту и дадите ему банку, она может взять ее, а затем отправиться на поиски мусорного бака. Если вместо этого убрать банку, робот перестанет чувствовать, что держит что-то в руке, и вместо этого начнет искать другие банки. Хотя плана или модели мира нет, Герберт в большинстве случаев будет вести себя подобающим образом. Реагируя непосредственно на внешний мир, нет проблем с неправильной моделью мира. Брукс сформулировал это так: «Мир — это лучшая модель самого себя» (Брукс, 19 лет).90).
Различное поведение организовано в том, что Брукс назвал архитектурой включения (Брукс, 1986). Главной особенностью этой архитектуры является то, что она основана на иерархии поведений. Поведение более высокого уровня запускается определенными стимулами и включает в себя выходные данные или поведение более низкого уровня (или поведение по умолчанию). Во многих отношениях архитектура включения имитирует эволюцию нейронной системы управления, где более поздние разработки основываются на более старых структурах, чтобы модулировать их поведение, а не заменять их полностью. Непосредственные реакции на внешние сигналы создают ощущение реалистичности в поведении робота.
Во многих отношениях архитектура включения имитирует эволюцию нейронной системы управления, где более поздние разработки основываются на более старых структурах, чтобы модулировать их поведение, а не заменять их полностью. Непосредственные реакции на внешние сигналы создают ощущение реалистичности в поведении робота.
Идеи такого типа также послужили источником вдохновения для автомобилей Брайтенберга (Braitenberg, 1986). Эти воображаемые существа управлялись более или менее прямыми соединениями между датчиками и исполнительными механизмами, которые состояли из колес с приводом от двигателя с каждой стороны транспортного средства. Симметрия транспортных средств заставляла их демонстрировать целенаправленное поведение с использованием очень простых механизмов. Например, раздражитель запаха справа будет возбуждать двигатель слева больше, чем двигатель справа, что заставит транспортное средство повернуть к источнику запаха. Этот простой дизайн будет производить как целенаправленное поведение, так и профиль скорости, который сразу же распознается.
Транспортные средства Брайтенберга интенсивно изучались как в компьютерном моделировании (Balkenius, 1995), так и в физических роботах (Lilienthal and Duckett, 2003). Интересно, что такие профили движения могут быть тем, как мы, люди, распознаем намерения других (Cavallo et al., 2016; ?).
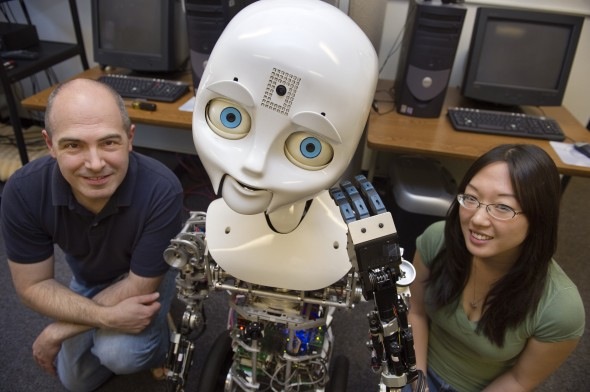
Успех робототехники, основанной на поведении, привел к быстрому росту уровня амбиций. В начале девяностых в лаборатории Родни Брукса полным ходом шла работа над роботом Cog (Brooks et al., 1998). Цель состояла в том, чтобы построить робота-гуманоида, основанного на поведенческих принципах, и, согласно первоначальному плану, Ког должен был достичь самосознания к 19 годам.97.
Несмотря на то, что он не достиг своих целей, проект Cog был чрезвычайно важен для разработки роботов-гуманоидов. Проект показал путь для дальнейших исследований, прежде всего, сделав приемлемым попытку имитировать человеческое тело, а также наш интеллект.
Очень интересным результатом проекта Cog стало то, что мы, люди, не можем не относиться к гуманоиду, как к живому существу. Ранее было замечено, что люди склонны вести себя по отношению к компьютерам так, как если бы они были людьми, и неудивительно, что это также относится и к гуманоидным роботам (Reeves and Nass, 19).96). Даже исследователи, которые программировали систему зрения в Cog, думали, что это будет сложно, когда робот все время смотрит на них и настраивает экраны так, чтобы они могли работать отдельно.
Ранее было замечено, что люди склонны вести себя по отношению к компьютерам так, как если бы они были людьми, и неудивительно, что это также относится и к гуманоидным роботам (Reeves and Nass, 19).96). Даже исследователи, которые программировали систему зрения в Cog, думали, что это будет сложно, когда робот все время смотрит на них и настраивает экраны так, чтобы они могли работать отдельно.
Даниэль Деннет назвал этот подход интенциональной позицией (Dennett, 1989). Мы предпочитаем интерпретировать поведение робота так, как будто его действия имеют намерения, как будто у него есть представления о мире и желания, которые он пытается исполнить. Не поможет знание того, как запрограммирован робот, и что им могут управлять только простые правила. Переживание интенциональности в любом случае присутствует. В самой крайней трактовке теории этого достаточно, чтобы добиться интеллекта у робота. Когда самое простое объяснение поведения робота состоит в том, что у него такие же намерения, как и у человека, то неважно, как это запрограммировано. Вы можете видеть это как обновленный тест Тьюринга. Мы видим, что это машина, но все же предпочитаем интерпретировать ее поведение, как если бы это было живое существо.
Вы можете видеть это как обновленный тест Тьюринга. Мы видим, что это машина, но все же предпочитаем интерпретировать ее поведение, как если бы это было живое существо.
Именно этот ход мыслей лежит в основе сюжета фильма Ex Machina. Программисту Калебу Смиту дается задание определить, знает ли человекоподобный робот Ава и может ли он думать. С самого начала ясно, что Ава уже прошла тест Тьюринга, и теперь вопрос в том, действительно ли она осознает или только имитирует человека. Фильм никогда не дает ответа, но Деннет и Брукс сказали бы, что это не имеет значения. Если кажется, что у робота есть сознание, разумно относиться к нему так, как будто оно есть, точно так же, как мы предполагаем, что другие люди обладают сознанием, даже если нет никакого способа доказать это.
Робот в фильме явно не человек. Вместо этого его сходство с жизнью исходит из его поведения, движений и способности взаимодействовать с людьми естественным образом. В следующем разделе мы расскажем о нашей текущей работе над роботом-гуманоидом Epi, цель которого — воспроизвести такие способности, оставаясь при этом явно роботизированным.
4 На пути к честному дизайну робота
Есть несколько причин, по которым хотелось бы сконструировать робота, который воспринимался бы как человек. Во-первых, робот, который должен работать с людьми, должен иметь возможность общаться с ними естественным образом. Речь идет не только о языке, но и о том, как невербально общаться с помощью движений. Когда мы смотрим на другого человека, мы обычно можем понять, что он делает. Движения и язык тела сообщают о намерениях и целях. Мы видим, заметил ли нас человек, которого встречаем в коридоре, и не столкнется ли он с нами (Pacchirotti et al., 2006; Daza et al., 2021). Это полезная функция также для робота, который не является в первую очередь социальным.
Конечно, такие тонкие сигналы легче понять от робота, похожего на человека, чем от робота, похожего на пылесос. Таким образом, может быть причина для создания роботов с гуманоидной формой. И если верить Деннету, мы будем относиться к роботу как к живому просто потому, что он наиболее экономичен.
Имитация жизни может служить как для упрощения взаимодействия, так и для того, чтобы сделать роботов более привлекательными. Это ясно показано в анимационных фильмах, где для привлечения зрителей необходима реалистичность. Аналогичные принципы могут быть применены к роботам с большим эффектом (Ribeiro and Paiva, 2012). Понятно, что сходство с жизнью полезно для коммуникативного робота (Ямаока и др., 2006). Однако это не означает, что робот должен притворяться живым. Вместо этого мы предлагаем, чтобы роботы были спроектированы честным образом, который четко показывает, что они являются машинами.
Если притворяться живым человеком — это не способ создания полезных роботов, как должны быть спроектированы роботы, обеспечивающие интуитивное взаимодействие с людьми? Мы хотим доказать, что есть много аспектов человека, которые действительно должны быть воспроизведены, но, возможно, не столько внешняя визуальная форма, сколько детальные движения и невербальные сигналы человека. Это соответствует рассуждениям, выдвинутым Fong et al. (2003), которые утверждают, что карикатурные люди могут быть более подходящими, потому что они избегают зловещей долины.
Это соответствует рассуждениям, выдвинутым Fong et al. (2003), которые утверждают, что карикатурные люди могут быть более подходящими, потому что они избегают зловещей долины.
С этой целью мы разработали робота Epi (рис. 1), который является попыткой честного гуманоидного дизайна в том смысле, что ясно, что это робот, хотя он все еще пытается имитировать детали взаимодействия человека и человека. и воспроизводит ряд тонких невербальных сигналов (Johansson et al., 2020). Общий дизайн робота никоим образом не уникален. Некоторые человекоподобные роботы имеют конструкцию, которая ясно показывает, что это робот (например, Sakagami et al., 2002; Metta et al., 2008; Pandey and Gelin, 2018; Gupta et al., 2019).). Однако некоторые аспекты робота необычны, например, анимированные физические радужки глаз и простые, но крепкие руки.
РИСУНОК 1 . Две версии человекоподобного робота Эпи. Роботы спроектированы так, чтобы четко показать, что они являются машинами, но включают в себя ряд антропоморфных особенностей, таких как общая форма тела с туловищем, двумя руками и головой вместе с двумя глазами с анимированными зрачками и руками с пятью пальцами. Хотя диапазон движений ограничен по сравнению с человеком, доступные степени свободы отражают основные суставы человеческого тела. Версия справа на рисунке использует упрощенную конструкцию без рук и используется для изучения взаимодействия человека и робота.
Хотя диапазон движений ограничен по сравнению с человеком, доступные степени свободы отражают основные суставы человеческого тела. Версия справа на рисунке использует упрощенную конструкцию без рук и используется для изучения взаимодействия человека и робота.
Робот пытается показать ограниченный антропоморфизм в том смысле, что он явно робот, но все же имеет некоторые соответствующие степени свободы, которые можно найти в человеческом теле.
Важным критерием проектирования было то, что робот должен быть в состоянии производить движения тела, очень похожие на движения человека. Здесь важна человеческая скорость движения (Fong et al., 2003). В недавнем исследовании изучалось, как люди будут реагировать на робота, который выполняет социальные коммуникативные движения в рамках совместной задачи по укладке коробок, а не на наиболее эффективное движение для выполнения задачи (Brinck et al., 2020). В результате участники бессознательно отвечали взаимностью на социальные движения, а также стремились к большему зрительному контакту с роботом, чем участники, которые сотрудничали с более эффективным, но необщительным роботом.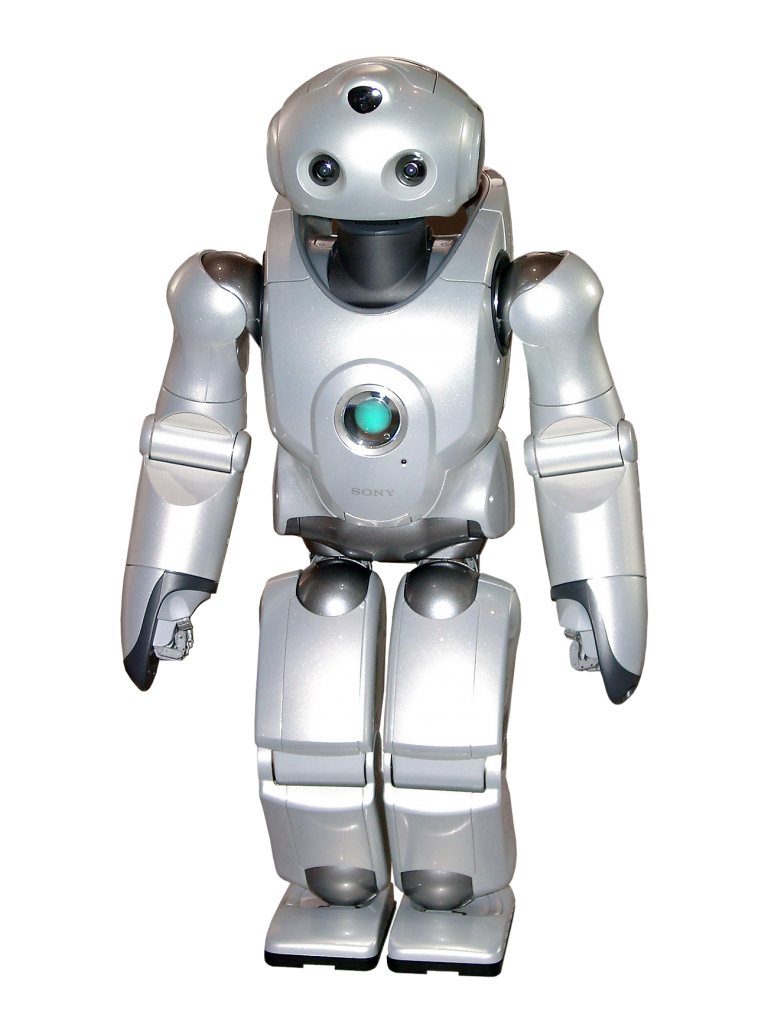 Исследование показало, что минимальные кинематические изменения сильно влияют на то, как люди реагируют на робота.
Исследование показало, что минимальные кинематические изменения сильно влияют на то, как люди реагируют на робота.
Физически анимированные зрачки Эпи можно использовать для общения с людьми таким образом, который бессознательно влияет на них (Johansson et al., 2020). Система управления использует модель систем мозга, участвующих в управлении зрачком, чтобы размер зрачка отражал ряд внутренних процессов, включая эмоциональные и когнитивные функции (Johansson and Balkenius, 2016; Balkenius et al., 2019). В настоящее время мы оцениваем, как люди бессознательно реагируют на расширение зрачков робота. В будущем мы стремимся проверить каждое проектное решение и то, как люди реагируют на различные функции робота и как они влияют на взаимодействие с роботом.
5 Заключение
Цель должна состоять не в том, чтобы попытаться обмануть, что машина — это человек, а в том, чтобы создать роботов, которые мы можем легко понять и с которыми можно взаимодействовать (Гудрич и Шульц, 2008). Такие роботы могут быть человекоподобными или, возможно, похожими на животных, но важен не человек сам по себе, а то, что мы можем естественным образом общаться с ними и воспринимать то, что они делают. Здесь важно рассмотреть основные аспекты общения между людьми: то, как мы используем язык тела и взгляд для координации наших действий. Только когда вам удастся уловить эти свойства, вы сможете создавать почти живых роботов.
Такие роботы могут быть человекоподобными или, возможно, похожими на животных, но важен не человек сам по себе, а то, что мы можем естественным образом общаться с ними и воспринимать то, что они делают. Здесь важно рассмотреть основные аспекты общения между людьми: то, как мы используем язык тела и взгляд для координации наших действий. Только когда вам удастся уловить эти свойства, вы сможете создавать почти живых роботов.
Интересно, что аспекты взаимодействия, которые заставляют робота выглядеть живым, аналогичны тем, которые делают взаимодействие успешным. Роботу нет необходимости притворяться живым, если его движения и взаимодействие связаны с тем, как реальный живой человек реагировал бы в той же ситуации. Реалистичность может быть важна для социальных роботов, но мы считаем, что она не менее важна для роботов, которые в первую очередь не являются социальными, поскольку она потенциально позволяет легче понять поведение робота, что делает его более прозрачным.
Заявление о доступности данных
Первоначальные материалы, представленные в исследовании, включены в статью/дополнительный материал. Дальнейшие запросы можно направлять соответствующему автору.
Дальнейшие запросы можно направлять соответствующему автору.
Вклад авторов
Все перечисленные авторы внесли существенный, непосредственный и интеллектуальный вклад в работу и одобрили ее для публикации.
Финансирование
Эта работа была частично поддержана Программой Wallenberg AI, Autonomous Systems and Software Program— Humanities and Society (WASP-HS), финансируемой Фондом Марианны и Маркуса Валленберг и Фондом Маркуса и Амалии Валленберг. Дополнительное финансирование было получено от Института Пуфендорф Лундского университета.
Конфликт интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечания издателя
Все претензии, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов.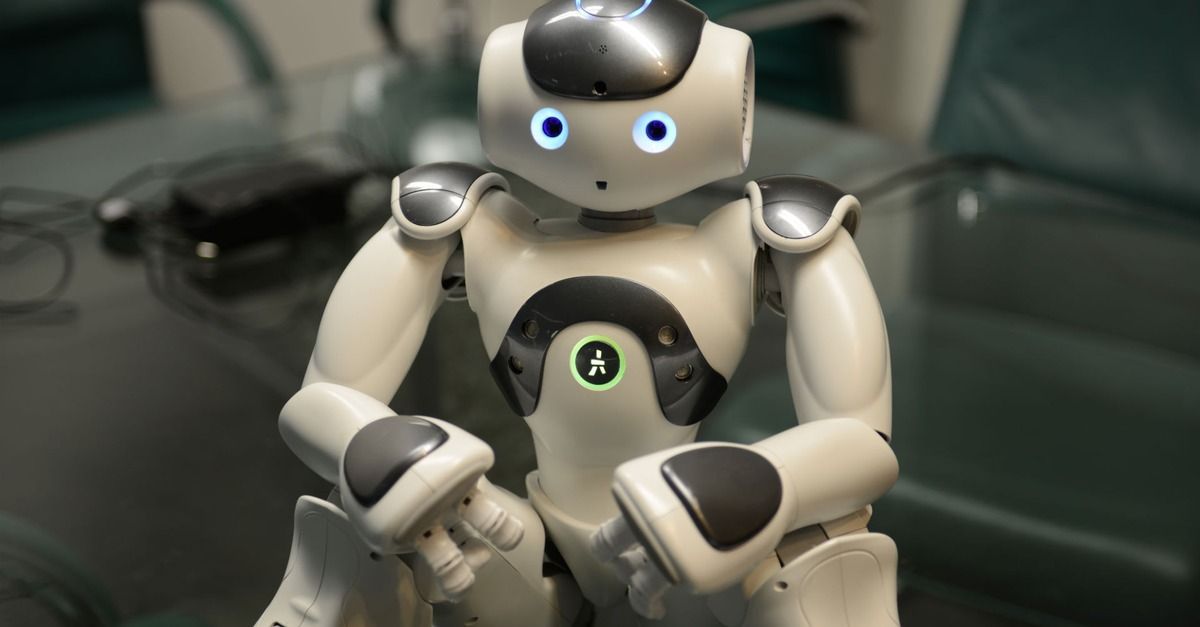 Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Ссылки
Абильдгаард, Дж. Р., и Шарф, Х. (2012). «Геминоид как лектор», Международная конференция по социальной робототехнике, Switzerland AG, 29–31 октября 2012 г. (Springer), 408–417. doi:10.1007/978-3-642-34103-8_41
CrossRef Full Text | Google Scholar
Балкениус К., Фосетт К., Фальк-Иттер Т., Гредебек Г. и Йоханссон Б. (2019). «Зрачковые корреляты эмоций и познания: вычислительная модель», 9-я Международная конференция IEEE/EMBS по нейронной инженерии (NER), Сан-Франциско, Калифорния, США, 20-23 марта 2019 г., 2019 г.(IEEE), 903–907. doi:10.1109/ner.2019.8717091
CrossRef Полный текст | Google Scholar
Балкениус, К. (1995). Естественный интеллект искусственных существ . Лунд: Когнитивные науки Лундского университета.
Google Scholar
Бартнек К. , Канда Т., Исигуро Х. и Хагита Н. (2007). «Является ли зловещая долина зловещей скалой», на 16-м международном симпозиуме IEEE по интерактивной коммуникации роботов и людей RO-MAN 2007, Чеджу, Корея, 26–29 августа., 2007 (IEEE), 368–373.
, Канда Т., Исигуро Х. и Хагита Н. (2007). «Является ли зловещая долина зловещей скалой», на 16-м международном симпозиуме IEEE по интерактивной коммуникации роботов и людей RO-MAN 2007, Чеджу, Корея, 26–29 августа., 2007 (IEEE), 368–373.
Полнотекстовая перекрестная ссылка | Google Scholar
Брайтенберг, В. (1986). Транспортные средства: эксперименты по синтетической психологии . Кембридж, Массачусетс: MIT Press.
Google Scholar
Бринк И., Хеко Л., Сикстрем К., Вандслеб В., Йоханссон Б. и Балкениус К. (2020). «Люди выполняют социальные движения в ответ на движения социальных роботов: моторное намерение во взаимодействии человека и робота», Совместная 10-я международная конференция IEEE по развитию, обучению и эпигенетической робототехнике, 2020 г. (ICDL-EpiRob, Вальпараисо, Чили, 26–30 октября 2020 г.). (IEEE), 1–6. doi: 10.1109./icdl-epirob48136.2020.9278114
CrossRef Полный текст | Google Scholar
Брукс, Р. (1986). Надежная многоуровневая система управления мобильным роботом. IEEE J. Робот. Автомат. 2, 14–23. doi:10.1109/jra.1986.1087032
IEEE J. Робот. Автомат. 2, 14–23. doi:10.1109/jra.1986.1087032
CrossRef Полный текст | Google Scholar
Брукс, Р. А. (1989). Робот, который ходит; Эмерджентное поведение тщательно разработанной сети. Нейронные вычисления. 1, 253–262. doi:10.1162/neco.1989.1.2.253
CrossRef Полный текст | Академия Google
Брукс, Р. А., Бризил, К., Марьянович, М., Скасселлати, Б., и Уильямсон, М. М. (1998). «Проект Cog: создание робота-гуманоида», на Международном семинаре по вычислениям для метафор, аналогии и агентов (Springer) 1562, 52–87.
Google Scholar
Брукс, Р. А., Коннелл, Дж., и Нин, П. (1988). Герберт: мобильный робот второго поколения . Кембридж, Массачусетс: MIT AI Lab, AI Memo 1016.
Google Scholar
Brooks, RA (1990). Слоны не играют в шахматы. Робототехника автономная Сист. 6, 3–15. doi:10.1016/s0921-8890(05)80025-9
CrossRef Full Text | Google Scholar
Брукс, Р. А. (1991). Интеллект без разума. Артиф. интеллект: крит. концепции 3, 107–163.
Интеллект без разума. Артиф. интеллект: крит. концепции 3, 107–163.
Google Scholar
Кавалло А., Коул А., Ансуини К., Капоцци Ф. и Беккио К. (2016). Расшифровка намерений по кинематике движения. науч. Респ. 6, 37036–37038. дои: 10.1038/srep37036
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Колби, К. М. (1981). Моделирование параноидального разума. Поведение. наук о мозге. 4, 515–534. doi:10.1017/s0140525x00000030
CrossRef Full Text | Google Scholar
Коупленд, Дж. (2012). Алан Тьюринг: взломщик кодов, спасший миллионы жизней. BBC News , 19 июня 2012 г., https://www.bbc.com/news/technology-18419691.
Google Scholar
Даза М., Барриос-Аранибар Д., Диас-Амадо Дж., Кардинале Ю. и Виласбоас Дж. (2021). Подход к социальной навигации, основанный на проксемике для переполненных сред людей и роботов. Micromachines 12, 193. doi:10.3390/mi12020193
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Деннет, округ Колумбия (1989). Намеренная стойка . Кембридж, Массачусетс: MIT Press.
Намеренная стойка . Кембридж, Массачусетс: MIT Press.
Google Scholar
Деннет, округ Колумбия (1978). Почему не вся игуана? Поведение. наук о мозге. 1, 103–104. doi:10.1017/s0140525x00059859
CrossRef Full Text | Google Scholar
Despouy, E., Curot, J., Deudon, M., Gardy, L., Denuelle, M., Sol, J.-C., et al. (2020). Система памяти быстрого визуального распознавания у людей, идентифицированная с использованием внутримозговых Erp. Церебр. Кора 30, 2961–2971. doi:10.1093/cercor/bhz287
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Фонг Т., Нурбахш И. и Даутенхан К. (2003). Обзор социально-интерактивных роботов. Робототехника автономная Сист. 42, 143–166. doi:10.1016/s0921-8890(02)00372-x
CrossRef Full Text | Google Scholar
Гудрич, М. А., и Шульц, А. С. (2008). Взаимодействие человека и робота: исследование . Now Publishers Inc.
Google Scholar
Гупта Н. , Смит Дж., Шрусбери Б. и Бёрнич Б. (2019). «2d Push Recovery и балансировка робота-гуманоида Eve R3-A с колесной базой с использованием прогнозирующего управления моделью и планирования усиления», на 19-й Международной конференции IEEE-RAS по роботам-гуманоидам, 2019 г. (Гуманоиды, Торонто, Онтарио, Канада, 15- 17 октября 2019 г. (IEEE), 365–372. doi:10.1109/humanoids43949.2019.
, Смит Дж., Шрусбери Б. и Бёрнич Б. (2019). «2d Push Recovery и балансировка робота-гуманоида Eve R3-A с колесной базой с использованием прогнозирующего управления моделью и планирования усиления», на 19-й Международной конференции IEEE-RAS по роботам-гуманоидам, 2019 г. (Гуманоиды, Торонто, Онтарио, Канада, 15- 17 октября 2019 г. (IEEE), 365–372. doi:10.1109/humanoids43949.2019.
44
CrossRef Full Text | Google Scholar
Haring, K. S., Silvera-Tawil, D., Matsumoto, Y., Velonaki, M., и Ватанабэ К. (2014 г.) «Восприятие робота-андроида в Японии и Австралии: межкультурное сравнение», Международная конференция по социальной робототехнике (Springer), 166–175. doi:10.1007/978-3-319-11973-1_17
CrossRef Полный текст | Google Scholar
Хираи К., Хиросе М., Хайкава Ю. и Такенака Т. (1998). «Разработка робота-гуманоида Honda», в материалах. Международная конференция IEEE по робототехнике и автоматизации 1998 г. (кат. № 98Ch46146, Лёвен, Бельгия, 20–20 мая 1998 г. (IEEE), 1321–1326.
Google Scholar
Ishiguro, H. (2016). «Android Science, в Cognitive Neuroscience Robotics A (Токио: Springer), 193–234. doi: 10.1007/978-4-431-54595-8_9
Полный текст CrossRef | Google Scholar
Йоханссон Б. и Балкениус К. (2016). Вычислительная модель расширения зрачка. Подключить. науч. 30, 1–15. doi:10.1080/09540091.2016.1271401
CrossRef Full Text | Google Scholar
Йоханссон Б., Тьостхейм Т. А. и Балкениус К. (2020). Эпи: открытая гуманоидная платформа для разработки робототехники. Междунар. Дж. Адв. Роботизированная система 17, 1729881420911498. Дои: 10.1177/1729881420911498
Полнотекстовая перекрестная ссылка | Google Scholar
Лилиенталь, А. Дж., и Дакетт, Т. (2003). «Experimental Analysis of Smelling Braitenberg Vehicles», международная конференция IEEE по передовой робототехнике (ICAR 2003, Коимбра, Португалия, 30 июня — 3 июля 2003 г. (Коимбра, университет), 375–380.
Google Scholar
MacDorman, K. F. и Entezari, S. O. (2015). Индивидуальные различия предсказывают чувствительность к зловещей долине. Is 16, 141–172. doi:10.1075/is.16.2.01mac
F. и Entezari, S. O. (2015). Индивидуальные различия предсказывают чувствительность к зловещей долине. Is 16, 141–172. doi:10.1075/is.16.2.01mac
Полнотекстовая перекрестная ссылка | Google Scholar
Метта Г., Сандини Г., Вернон Д., Натале Л. и Нори Ф. (2008). «Робот-гуманоид iCub: открытая платформа для исследований в области воплощенного познания», в материалах 8-го семинара по показателям производительности интеллектуальных систем, Менло-Парк, Калифорния, США, 2–4 октября 2011 г. (IEEE), 50–56.
Google Scholar
Мори М., МакДорман К. и Кагеки Н. (2012). Зловещая долина. Роботы и автоматизация IEEE 2, 98–100.
Полнотекстовая перекрестная ссылка | Google Scholar
Нишио С., Исигуро Х. и Хагита Н. (2007). Geminoid: телеуправляемый Android существующего человека. Роботы-гуманоиды: New Dev. 14, 343–352. doi:10.5772/4876
CrossRef Полный текст | Google Scholar
Паккиротти, Э., Кристенсен, Х.И., и Йенсфельт, П.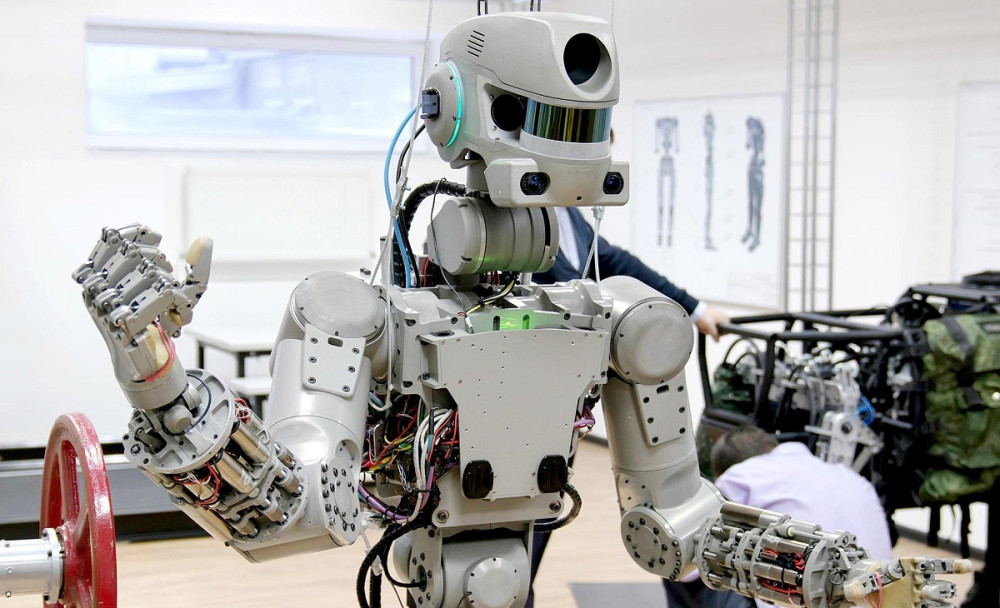 (2006). «Оценка расстояния прохождения для социальных роботов», Роман, 2006 г. — 15-й международный симпозиум IEEE по интерактивному общению роботов и людей, Хатфилд, Великобритания, 6–8 сентября 2006 г. (IEEE), 315–320. Дои: 10.1109/roman.2006.314436
(2006). «Оценка расстояния прохождения для социальных роботов», Роман, 2006 г. — 15-й международный симпозиум IEEE по интерактивному общению роботов и людей, Хатфилд, Великобритания, 6–8 сентября 2006 г. (IEEE), 315–320. Дои: 10.1109/roman.2006.314436
CrossRef Полный текст | Google Scholar
Пандей А.К. и Гелин Р. (2018). Массовый общительный робот-гуманоид: Pepper: первая машина в своем роде. Робот IEEE. Автомат. Маг. 25, 40–48. doi:10.1109/mra.2018.2833157
CrossRef Full Text | Google Scholar
Редондо, М.Э.Л., Шутти, А., Инкао, С., Ри, Ф., и Невиадомски, Р. (2021). «Могут ли роботы повлиять на удобство человека во время интервью в прямом эфире», в сопровождении Международной конференции ACM / IEEE 2021 г. по взаимодействию человека и робота, Боулдер, Колорадо, 8 марта 2021 г., стр. 186–189..
Полнотекстовая перекрестная ссылка | Google Scholar
Ривз Б. и Насс К. (1996). Уравнение СМИ: как люди относятся к компьютерам, телевидению и новым медиа как к реальным людям . Кембридж, Соединенное Королевство): Издательство Кембриджского университета.
Кембридж, Соединенное Королевство): Издательство Кембриджского университета.
Google Scholar
Рибейро, Т., и Пайва, А. (2012). «Иллюзия роботизированной жизни: принципы и практика анимации для роботов», в материалах седьмой ежегодной международной конференции ACM/IEEE по взаимодействию человека и робота, Бостон, Массачусетс, США, 5–8 марта 2012 г. (IEEE), 383– 390.
Google Scholar
Розенблют А. и Винер Н. (1945). Роль моделей в науке. Филос. науч. 12, 316–321. doi:10.1086/286874
CrossRef Полный текст | Google Scholar
Сакагами Ю., Ватанабэ Р., Аояма К., Мацунага С., Хигаки Н. и Фуджимура К. (2002). «Интеллектуальный Asimo: системный обзор и интеграция», международная конференция IEEE/RSJ по интеллектуальным роботам и системам, Лозанна, Швейцария, 30 сентября – 4 октября 2002 г. (IEEE), 2478–2483.
Google Scholar
Шимада М., Минато Т., Итакура С. и Исигуро Х. (2007). «Зловещая долина андроидов и ее гипотеза бокового торможения», в RO-MAN 2007 — 16-й Международный симпозиум IEEE по интерактивной коммуникации роботов и людей, Чеджу, Корея (Юг, 26–29 августа 2007 г. (IEEE), 374–379. doi:10.1109/roman.2007.4415112
(IEEE), 374–379. doi:10.1109/roman.2007.4415112
CrossRef Full Text | Google Scholar
Timberlake, W. (1994) Behavior Systems, Associationism, and Pavlovian Conditioning. Психон. Бык. Ред. 1, 405–420. doi:10.3758/bf03210945
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Тинберген, Н. (2020). Исследование инстинктов . Лексингтон, Массачусетс: Pygmalion Press, отпечаток Plunkett Lake Press.
Google Scholar
Turing, AM (1950). «Вычислительные машины и интеллект», в Анализе теста Тьюринга (Springer), 23–65.
Google Scholar
Weizenbaum, J. (1966). ELIZA-компьютерная программа для изучения общения человека и машины на естественном языке. Комм. АСМ 9, 36–45. doi:10.1145/365153.365168
CrossRef Полный текст | Google Scholar
Уилсон, М. (2002). Шесть взглядов на воплощенное познание. Психон. Бык. Ред. 9, 625–636. doi:10.3758/bf03196322
Резюме PubMed | Полный текст перекрестной ссылки | Google Scholar
Wilson, SW (1991). «Путь аниматов к ИИ» в книге «От животных к аниматам: материалы первой международной конференции по моделированию адаптивного поведения». Редакторы Ж.-А. Мейер и С. В. Уилсон.
«Путь аниматов к ИИ» в книге «От животных к аниматам: материалы первой международной конференции по моделированию адаптивного поведения». Редакторы Ж.-А. Мейер и С. В. Уилсон.
Google Scholar
Ямаока Ф., Канда Т., Исигуро Х. и Хагита Н. (2006). «Насколько контингентным должен быть коммуникационный робот», в материалах 1-й конференции ACM SIGCHI/SIGART по взаимодействию человека и робота, Солт-Лейк-Сити, Юта, США, 2–3 марта 2006 г., стр. 313–320.
Полнотекстовая перекрестная ссылка | Google Scholar
Цимке Т., Балкениус К. и Халлам Дж. (2012). в From Animals to Animats 12: 12-я Международная конференция по моделированию адаптивного поведения, SAB 2012, Оденсе, Дания, 27–30 августа 2012 г. (Springer).
Злотовски, Дж., Праудфут, Д., и Бартнек, К. (2013). «Больше человека, чем человека: действительно ли сверхъестественная кривая имеет значение», в материалах семинара HRI2013 по дизайну человекоподобия в HRI от сверхъестественной долины до минималистского дизайна, Токио, 3 марта (ACM/IEEE).
Google Scholar
Стоит ли бояться человекоподобных андроидов?
В декабре компания Engineered Arts, робототехническая компания из Корнуолла, покорила Твиттер, опубликовав видео с одним из своих последних творений — роботом-гуманоидом по имени Амека. Видео было опубликовано тысячами людей в Твиттере, которые были в равной степени встревожены и поражены его человеческим видом и реалистичными выражениями лиц.
Мы поговорили с Уиллом Джексоном, генеральным директором Engineered Arts, о том, как была создана Ameca, для чего будет использоваться робот и не находит ли он собственное творение тревожным.
Многие видели видео Амеки онлайн, но для чего нужен робот?
В Ameca мы хотели создать интуитивно понятный и простой способ общения с машиной. По сути, это гуманоид, созданный как платформа для ИИ.
Сейчас много людей работает над программным обеспечением для человеческого взаимодействия, такими вещами, как распознавание лиц, выражение и оценка, а затем есть такие вещи, как распознавание жестов, распознавание речи и преобразование текста в речь. Хотя над программным обеспечением работает много людей, аппаратного обеспечения очень мало. Если вы хотите, чтобы люди действительно взаимодействовали с ИИ, экран и клавиатура не помогут.
Хотя над программным обеспечением работает много людей, аппаратного обеспечения очень мало. Если вы хотите, чтобы люди действительно взаимодействовали с ИИ, экран и клавиатура не помогут.
Мы хотели создать машину, которая, если вы улыбаетесь, знает, что вы счастливы, а если вы хмуритесь, знает, что вы не одобряете. Вам даже не нужно говорить, чтобы общаться; кивок головы, подмигивание или улыбка стоят тысячи слов. Именно такие взаимодействия мы хотели исследовать с Ameca.
Робот Ameca с вытянутой рукой © Engineered Arts
Как работает Ameca?
На физическом уровне существует множество двигателей, но это совершенно новый дизайн. Мы используем множество приводов с шарико-винтовой передачей, которые достаточно хорошо имитируют человеческие мышцы. Вы заметите в видеороликах, что движение очень плавное, потому что мы потратили много времени на то, чтобы сделать это правильно.
Что касается программного обеспечения, у нас есть полный стек программного обеспечения, в котором есть все, от управления двигателем до функций искусственного интеллекта, таких как распознавание лиц и речи.
Тем не менее, Амека не является разумным роботом. Люди склонны проецировать свое собственное представление о том, что такое робот: если они видят, что он ведет себя определенным образом, они делают предположения, потому что это поведение человеческого типа, которое обычно определяется человеческим уровнем разума, но это абсолютно не так.
Еще
То, что вы видите, это исполняемый код, и некоторые из них могут быть довольно простыми. Но иллюзия может быть увлекательной и весьма мощной.
Вас когда-нибудь пугали роботы?
Да, вас застигнут врасплох. Они делают то, чего вы совсем не ожидаете. Они запрограммированы на зрительный контакт, и иногда, когда они бросают на вас забавный взгляд, вы не можете не приписать этому какой-то мыслительный процесс.
Мы оставили открытыми многие механики с Амекой, и это была попытка уйти от того, что называется Зловещей долиной. Это своего рода график зависимости внешнего вида робота от приемлемости. Если слишком приблизиться к человеку, то график ныряет в долину, а значит, жутко: не нравится, потому что он близок к человеку, но не совсем идеален.
Если слишком приблизиться к человеку, то график ныряет в долину, а значит, жутко: не нравится, потому что он близок к человеку, но не совсем идеален.
У Boston Dynamics [американская робототехническая компания] то же самое со своей собакой-роботом. У него нет головы, и он, очевидно, механический, но двигается точно так же, как собака. Было одно видео, где кто-то пинает робота. Что-то глубоко внутри нас распознает, когда что-то живое, по тому, как оно движется, и очень трудно отвергнуть эту ассоциацию биологического движения с живым существом.
Ameca смотрит вдаль © Engineered Arts
И вы, и Boston Dynamics часто распространяете свои видео. Как вы думаете, что так привлекает людей в них?
Для Boston Dynamics их работа заключается в том, чтобы робот добирался из точки А в точку Б. Мы больше сосредоточены на человеческом взаимодействии. Однако когда их машины начинают двигаться как живые существа, они попадают в Зловещую долину. Я думаю, именно это делает видео вирусными.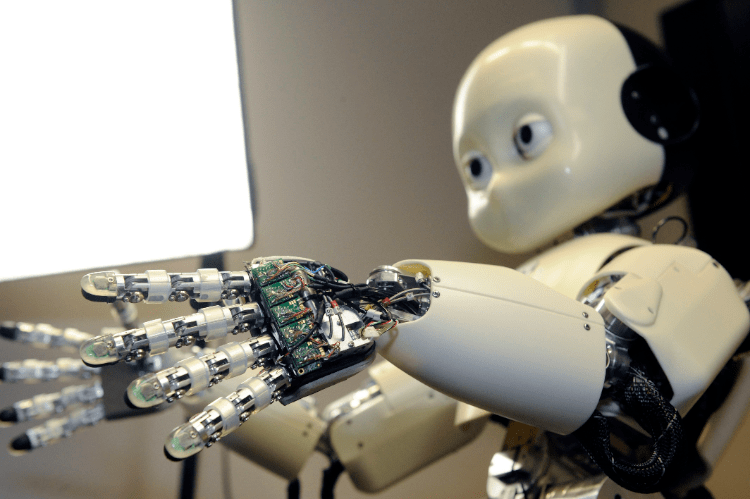
Люди всегда представляют себе сценарий Терминатора, думая, что это будет означать конец света, но я бы не стал слишком беспокоиться об этом. Если бы ИИ хотел нас уничтожить, он бы не послал робота-гуманоида. Это просто взорвет несколько боеголовок, это будет намного быстрее стереть нас с лица земли, чем гоняться за нами с оружием — этот сценарий просто делает хороший фильм.
Речь идет об этом видении себя. Это как смотреть на себя в зеркало, видеть эту машину и задаваться вопросом, что между вами двумя отличается. Я думаю, видя что-то, что движется и ведет себя как человек, это раздражает, и именно поэтому эти видео становятся вирусными.
Что бы вы сказали людям, обеспокоенным роботами, чтобы их успокоить?
Есть серьезные опасения по поводу ИИ, но ИИ — это не роботы, поэтому беспокойтесь о программном обеспечении и о том, что вы им управляете. Я бы никогда не поставил систему вооружения под контроль ИИ, это действительно ужасная идея.
Используют ли военные роботов-гуманоидов на действительной службе? Насколько я знаю, нет.