Содержание
Искусственный интеллект и интеллектуальные роботы – что это такое или кто это такие?
Закон.Ру – официально зарегистрированное СМИ. Ссылка на настоящую статью будет выглядеть следующим образом: Рожкова М.А. Искусственный интеллект и интеллектуальные роботы – что это такое или кто это такие? [Электронный ресурс] // Закон.ру. 2019. 23 ноября. URL: https://zakon.ru/blog/2019/11/23/iskusstvennyj_intellekt_i_intellektualnye_roboty__chto_eto_takoe_ili_kto_eto_takie
Сегодня на многих конференциях и во многих публикациях обсуждаются вопросы, связанные с использованием искусственного интеллекта (далее – ИИ) и роботов. Но высказываемые позиции иногда сложно поддержать ввиду очевидного непонимания спикерами/авторами того, что же собой представляет ИИ и (или) робот.
В преддверии «IP-battle: интеллектуальные права на объекты, создаваемые искусственным интеллектом (роботом)», мне показалось правильным уделить некоторое внимание вопросу, вынесенному в заголовок настоящей статьи, и попробовать нивелировать проблему признания ИИ/робота субъектом права.
Как известно, существует прецедент признания за роботом правосубъектности – речь идет о известном человекоподобном роботе Софии, получившей гражданство Саудовской Аравии[1]. Этот прецедент, по всей видимости, стал результатом активно прорабатывающейся на тот момент идеи признания «электронной личности» для обеспечения прав и обязанностей ИИ, в связи с которой Европейским парламентом предлагалось разработать ряд нормативных актов, регулирующих использование и создание ИИ и роботов[2]. Но в большинстве стран позиция, предполагающая признание ИИ или робота полноценным субъектом права, пока не нашла широкой поддержки. Вместе с тем, например, в Соединенном Королевстве недавно была подана патентная заявка, в которой в качестве автора изобретения был заявлен ИИ[3].
Что собой представляет ИИ?
Как известно, ИИ – понятие многоаспектное: под ним понимают и область информатики, и междисциплинарную науку, и способность информационной системы правильно интерпретировать данные, используя полученный результат для достижения конкретной цели, и саму информационную систему и проч.
В целях настоящей статьи ИИ рассматривается в качестве интеллектуальной системы (информационно-вычислительной системы), способной без участия человека[4] решать задачи, в том числе относящиеся к творческим, в также самообучаться в ходе решения таких задач. Такая система включает в свой состав три основных блока:
– базы данных (наборы больших данных) и знаний о предметной области, включая результаты машинного обучения;
– решатель – компьютерную программу, которая на основе специализированных обучающихся алгоритмов, разрешает поставленные задачи;
– интеллектуальный интерфейс – совокупность средств, методов и правил, которые позволяют человеку вести общение с самой интеллектуальной системой.
В статье Википедии, посвященной ИИ[5], обращается внимание на то, что словосочетание Artificial Intelligence (AI), предложенное Дж. Маккрти еще в 1956 г., вовсе не связывалось его автором с пониманием интеллекта у человека – под intelligence понималась «вычислительная составляющая способности достигать целей в мире»[6], разные виды которой встречаются не только у людей, но и у животных, и у некоторых машин. В связи с этим в отечественных публикациях обычно подчеркивается, что слово «intelligence» в используемом контексте означает скорее «умственные способности» или «умение рассуждать разумно», а вовсе не «интеллект», для которого есть английский аналог «intellect».
В связи с этим в отечественных публикациях обычно подчеркивается, что слово «intelligence» в используемом контексте означает скорее «умственные способности» или «умение рассуждать разумно», а вовсе не «интеллект», для которого есть английский аналог «intellect».
Таким образом, можно сделать вывод о том, что перевод словосочетания «Artificial Intelligence» на русский язык как «искусственный интеллект» не является верным – вероятно, точнее было бы перевести его, например, как «искусственный разум». Но поскольку термин «искусственный интеллект» уже прочно вошел в отечественный обиход, в рамках настоящей статьи не будет предлагаться его замена или коррективы. В то же время нужно учитывать обозначенный нюанс, так как в некоторых случаях он вполне способен оказать влияние на исследовательские выводы.
В развитие изложенного хотелось бы процитировать публикацию Константина Хайта, который пишет о том, что словосочетание «искусственный интеллект» сегодня имеет совсем не тот смысл, который пытаются вложить в него журналисты и философы, и более того, это словосочетание представляет собой одну из главных лингвистических подтасовок современности: «То, что человек решает некоторую задачу определенным способом, вовсе не означает, что компьютер решает ее точно таким же способом. .. Однако, вольная или невольная подтасовка, кроющаяся за словосочетанием «искусственный интеллект» намного глубже»[7]. Поясняя свою позицию, автор подчеркивает: «Интеллект – это штука, прямо обратная алгоритму, который… есть «ясная, точная последовательность действий, заведомо приводящая к результату». Словосочетание «интеллектуальные алгоритмы» – оксюморон, интеллект как раз и применим в тех случаях, когда приемлемого алгоритма не существует… Проблема в том, что человек и компьютер устроены фундаментально по-разному. Все, что умеет компьютер – считать. Выполнять последовательные вычислительные операции с сумасшедшими по человеческим меркам скоростями. Компьютер спроектирован для реализации алгоритмов, и эту задачу он решает блестяще. Человек изначально не приспособлен для выполнения алгоритмов… мы не умеем вычислять. Наш мозг приспособлен для единственной операции – поиска ассоциативных связей. Любую задачу человек решает подбором подходящих ассоциаций. И делает это несоизмеримо лучше любого компьютера»[8].
.. Однако, вольная или невольная подтасовка, кроющаяся за словосочетанием «искусственный интеллект» намного глубже»[7]. Поясняя свою позицию, автор подчеркивает: «Интеллект – это штука, прямо обратная алгоритму, который… есть «ясная, точная последовательность действий, заведомо приводящая к результату». Словосочетание «интеллектуальные алгоритмы» – оксюморон, интеллект как раз и применим в тех случаях, когда приемлемого алгоритма не существует… Проблема в том, что человек и компьютер устроены фундаментально по-разному. Все, что умеет компьютер – считать. Выполнять последовательные вычислительные операции с сумасшедшими по человеческим меркам скоростями. Компьютер спроектирован для реализации алгоритмов, и эту задачу он решает блестяще. Человек изначально не приспособлен для выполнения алгоритмов… мы не умеем вычислять. Наш мозг приспособлен для единственной операции – поиска ассоциативных связей. Любую задачу человек решает подбором подходящих ассоциаций. И делает это несоизмеримо лучше любого компьютера»[8]. В качестве примера автор рассматривает распознавание лиц: «Действительно, эту задачу человек и машина сейчас решают приблизительно на одном уровне успешности. Правда, делают это совершенно по-разному. Компьютер – обсчитывает характеристические точки и вычисляет корреляцию, человек – ищет в памяти ассоциации и устанавливает связи между ними. Пока речь идет о частном вопросе «определите кто это», оба подхода дают примерно эквивалентные результаты. Но, если ставить задачу шире, пути человека и компьютера резко расходятся в соответствии с принципами функционирования. Машина, выполняющая алгоритм, с относительной легкостью обсчитает хоть десять изображений, хоть пятьсот, хоть полмиллиона, хватило бы вычислительных мощностей… Зато homo sapiens столь же просто определит доброе перед ним лицо, или злое, взволнованное, или спокойное, привлекательное, или отталкивающее. Наш мозг заточен не на перебор, а на сравнение, причем сравнение ассоциативное, то есть использующее неполностью определенный эталон»[9].
В качестве примера автор рассматривает распознавание лиц: «Действительно, эту задачу человек и машина сейчас решают приблизительно на одном уровне успешности. Правда, делают это совершенно по-разному. Компьютер – обсчитывает характеристические точки и вычисляет корреляцию, человек – ищет в памяти ассоциации и устанавливает связи между ними. Пока речь идет о частном вопросе «определите кто это», оба подхода дают примерно эквивалентные результаты. Но, если ставить задачу шире, пути человека и компьютера резко расходятся в соответствии с принципами функционирования. Машина, выполняющая алгоритм, с относительной легкостью обсчитает хоть десять изображений, хоть пятьсот, хоть полмиллиона, хватило бы вычислительных мощностей… Зато homo sapiens столь же просто определит доброе перед ним лицо, или злое, взволнованное, или спокойное, привлекательное, или отталкивающее. Наш мозг заточен не на перебор, а на сравнение, причем сравнение ассоциативное, то есть использующее неполностью определенный эталон»[9].
С учетом всего изложенного на сегодняшний день вряд ли можно признать искусственный разум равным человеческому: ИИ сегодня – это только быстродействующая вычислительная машина, использующая заложенные в нее обучающиеся алгоритмы для решения конкретных задач. Да, это очень сложная информационно-вычислительная система, но она решает задачи, которые поставлены ей человеком, на основе алгоритмов, разработанных человеком, не выходя за рамки, обозначенные человеком. Поэтому явно преждевременно настаивать на правосубъектности ИИ, признавая его полноценным членом общества, отношения с которым остро нуждаются в соответствующем правовом регулировании.
Задача создания интеллекта, действительно сопоставимого с человеческим, стоит на повестке дня, и ученые говорят о некоторых подвижках в этой области. Вместе с тем сегодня определяющим является следующий вывод: «Мы используем искусственный интеллект в тех областях, где человеческий работает не лучшим образом. Создать конкурента человеческому разуму во всех его проявлениях пока не получилось»[10].
Что собой представляют роботы?
Выше разбиралась ситуация, когда ИИ «обитает» в компьютере. В настоящей части статьи будет рассматриваться «воплощение» ИИ в роботе.
Слово «робот» у многих вызывает стойкую ассоциацию с человекоподобными роботами[11], которые могут управлять конечностями, слухом, зрением и речью, манипулировать предметами, общаться с человеком и проч. Между тем, различаясь по своему назначению и исполняемым функциям (например, промышленные роботы бывают сварочные, режущие, комплектовочные, сборочные, упаковочные и проч.), роботы существенно разнятся и по внешнему виду: нередко робот – это всего лишь механическая «рука», которая осуществляет запрограммированные манипуляции. Да и роботы-гуманоиды далеко не во всех случаях полностью воспроизводят человека: например, уже упоминавшийся робот София имеет только верхнюю часть «туловища», а задняя часть ее головы сделана из прозрачного пластика, через который видно устройство ее «мозга».
Под роботами традиционно понимаются автоматические устройства (создаваемые обычно по принципу живого организма), которые предназначены для осуществления определенных операций, действуют по заложенной программе и получают информацию от датчиков. Но такое определение годится, скорее для первых двух поколений роботов.
Но такое определение годится, скорее для первых двух поколений роботов.
Роботы первого поколения – это программные роботы (роботы с программным управлением), которые выполняют четко определенные операции в последовательности, жестко заложенной программой. Это как раз и есть те самые промышленные роботы, которые осуществляют транспортировку, сварку, штамповку, простейшие сборочные операции и т.д.
Роботы второго поколения – это очувствленные роботы, которые также выполняют операции в соответствии с программой, но нуждаются в получении информации извне, что и обусловило наделение их искусственными «органами чувств»: тактильными, зрительными, звуковыми, кинестетическими и другими сенсорными датчиками. Работа роботов второго поколения предполагает использование алгоритмического и программного обеспечения, что позволяет роботам ориентироваться в существующих условиях и автоматически приспосабливаться (адаптироваться) в случае изменения этих условий (что и объясняет их второе название – адаптивные роботы), а также обучаться в процессе функционирования.
В целях настоящей работы интерес представляют роботы третьего поколения – интеллектуальные роботы, которые предназначены не только для осуществления физических и двигательных функций, но и для решения интеллектуальных задач. Речь не только о роботах-андроидах, игровых и бытовых роботах, но и военных, боевых, морских роботах, беспилотных летательных аппаратах и беспилотных автомобилях, космических и медицинских роботах, экзоскелетах и т.д. Эти роботы, бесспорно, отличаются от роботов второго поколения сложностью управляющей информационно-вычислительной системы, включающей элементы ИИ. Но несмотря на то, что интеллектуальный робот управляется ИИ, он вовсе не становится самостоятельной «электронной личностью», способной критически мыслить, – на сегодняшний это все та же информационно-вычислительная система, ограниченная заложенным в нее функционалом и имеющая соответствующую ее функциям материальную оболочку.
Заключение
Изложенное позволяет говорить о том, что сегодня человечество и близко не подошло к тому, чтобы признавать ИИ или интеллектуальных роботов субъектами права.
Но вместе с тем использование ИИ порождает массу вопросов, связанных с возникновением интеллектуальных прав на объекты, которые созданы с «участием» и «единолично» ИИ. Каким образом следует решать вопрос принадлежности интеллектуальной собственности для целей оборота, например, когда автором картины является интеллектуальный робот, написавший ее самостоятельно? Да и возникают ли в таких случаях интеллектуальные права? И если да, то кто становится правообладателем – владелец робота, разработчик ПО, «человек, нажавший кнопку»? Или в ситуации, когда результаты творчества представляют собой итог использования специальной программы, включающей элементы ИИ, – можно ли говорить здесь о возникновении интеллектуальных прав у лица, использующего такую программу?
Эти и другие вопросы мы планируем обсудить на «IP-battle: интеллектуальные права на объекты, создаваемые искусственным интеллектом (роботом)», который проводит IP CLUB в партнерстве со Школой права «Статут».
Об авторе. Другие работы автора в открытом доступе – http://rozhkova.com/all.html
Другие работы автора в открытом доступе – http://rozhkova.com/all.html
P.S. лента новостей IP CLUB в сфере права интеллектуальной собственности и цифрового права (IP & Digital Law) в:
facebook – https://www.facebook.com/ipclubin
Вконтакте – https://vk.com/ipclubin
telegram – https://t.me/ipclubin
[1] Morby Alice. Saudi Arabia becomes first country to grant citizenship to a robot
// URL: https://www.dezeen.com/2017/10/26/saudi-arabia-first-country-grant-citizenship-robot-sophia-technology-artificial-intelligence-ai/
[2] Give robots ‘personhood’ status, EU committee argues // URL: https://www.theguardian.com/technology/2017/jan/12/give-robots-personhood-status-eu-committee-argues
[3] Kelion Leo. AI system ‘should be recognised as inventor’ // URL: https://www.bbc.com/news/technology-49191645
[4] В этом ее отличие от интеллектуализированной системы, которая решает задачи с участием лица, принимающего решение.
[5] URL: https://ru.wikipedia.org/wiki/Искусственный интеллект
[6] McCarthy John. What is Artificial Intelligence? // URL: http://www-formal.stanford.edu/jmc/whatisai/whatisai.html (see: Basic Questions)
[7] URL: https://www.facebook.com/konstantin.khait/posts/2479784552042775
[8] Там же.
[9] Там же.
[10] Ноздрачев В. Эволюция или революция: что ждёт искусственный интеллект // URL: https://vc.ru/future/89726-evolyuciya-ili-revolyuciya-chto-zhdet-iskusstvennyy-intellekt
[11] Хронология развития технологии: человекоподобные роботы (Как менялись андроиды последние 500 лет) // URL: https://vc.ru/future/49206-hronologiya-razvitiya-tehnologii-chelovekopodobnye-roboty
ИНТЕЛЛЕКТУАЛЬНЫЕ РОБОТЫ ПРОФЕССОРА УОРВИКА | Наука и жизнь
Наука и жизнь // Иллюстрации
Открыть в полном размере
‹
›
В конце октября Москву и Санкт-Петербург посетил профессор Кевин Уорвик — один из ведущих специалистов в области искусственного интеллекта и робототехники. Его визит, подготовленный Британским Советом, был приурочен к выходу в свет русского издания книги профессора К. Уорвика «Наступление машин» (издательство «Наука/Интерпериодика»).
Его визит, подготовленный Британским Советом, был приурочен к выходу в свет русского издания книги профессора К. Уорвика «Наступление машин» (издательство «Наука/Интерпериодика»).
Кевин Уорвик и его научная группа на кафедре кибернетики в университете города Рединга (Великобритания) создали уникальных роботов, способных общаться друг с другом и самостоятельно программировать себя. В настоящий момент роботы Уорвика обладают уровнем интеллекта и «нервной системой» насекомых. Профессор Уорвик считает, что уже через пять лет его роботы будут обладать нервной системой высших позвоночных животных, а еще через 10-15 лет их интеллект будет конкурировать с человеческим. Профессор относится к роботам как к своим детям и дает им имена: Роджер, Элма, Далек, Уолтер.
Большинство проектов профессора и его группы ориентировано на решение конкретных задач. Так, ими были созданы роботы, способные определять источник возгорания в помещении и направлять туда струю жидкости. Роджер — «следящий» робот для сопровождения участников многокилометровых забегов. Парализованным людям поможет «умное инвалидное кресло» — кресло-робот, оснащенное компьютером, телевизором и способное двигаться в любом направлении по желанию хозяина.
Парализованным людям поможет «умное инвалидное кресло» — кресло-робот, оснащенное компьютером, телевизором и способное двигаться в любом направлении по желанию хозяина.
Научные интересы группы профессора Уорвика лежат в области создания шагающих роботов, способных к обучению. Пример такого робота — Элма — на 1-й странице обложки. Шагающий шестиногий робот, снабженный ультразвуковыми детекторами и инфракрасными сенсорами, помогающими ориентироваться в пространстве. Схема Элмы напоминает структуру нервной системы насекомого: каждая ее нога контролируется отдельным «нервным» узлом. Элма может обучаться искусству двигаться, не сталкиваясь с предметами, и даже — новым походкам.
Роботы Кевина Уорвика впервые посетили Россию. Любимый робот профессора — механическая «Кошка» летела в самолете как полноправный пассажир, имея отдельное место. Спонсором ее перелета в Россию выступила авиакомпания «Британские авиалинии».
Книга Кевина Уорвика «Наступление машин» была издана в Великобритании, Германии, во Франции и в США и стала научно-популярным бестселлером. В ней нашли отражение философские взгляды Кевина Уорвика на будущее искусственного интеллекта. Теперь эта книга стала доступна и для российского читателя. Презентация ее прошла в Москве в Доме книги на Новом Арбате и в Санкт-Петербурге в Доме книги на Невском проспекте.
В ней нашли отражение философские взгляды Кевина Уорвика на будущее искусственного интеллекта. Теперь эта книга стала доступна и для российского читателя. Презентация ее прошла в Москве в Доме книги на Новом Арбате и в Санкт-Петербурге в Доме книги на Невском проспекте.
В программу визита профессора Уорвика в Москве входили встречи с научной общественностью на механико-математическом факультете МГУ и в Роботоцентре МГТУ им. Баумана, где им были прочитаны лекции по робототехнике и искусственному интеллекту, а также состоялись демонстрации роботов.
Подробнее о роботах Кевина Уорвика, а также о проблемах искусственного интеллекта читайте в ближайших номерах «Науки и жизни».
Что такое «интеллектуальный» робот
Интеллектуальные роботы вчера, сегодня, завтра
Эволюция представлений о путях развития робототехники, ее целях и задачах очень похожа на то, что наблюдается в такой области, как искусственный интеллект. Объясняется это тем, что исходные задачи оказались гораздо более сложными, требующими создания совершенно иных моделей, методов, технологий и прежде всего — технологий искусственного интеллекта. Технологии искусственного интеллекта (ИИ) всегда были тесно связаны с робототехникой. Не случайно одним из направлений ИИ до сих пор считается целеустремленное поведение роботов (создание интеллектуальных роботов, способных автономно выполнять операции для достижения поставленных человеком целей). В общем виде робота можно определить как технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, системами управления и информации, а также средствами решения вычислительных и логических задач.
Технологии искусственного интеллекта (ИИ) всегда были тесно связаны с робототехникой. Не случайно одним из направлений ИИ до сих пор считается целеустремленное поведение роботов (создание интеллектуальных роботов, способных автономно выполнять операции для достижения поставленных человеком целей). В общем виде робота можно определить как технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, системами управления и информации, а также средствами решения вычислительных и логических задач.
В настоящее время существует три поколения роботов:
- Программные. Жестко программируется (циклограмма).
- Адаптивный. Возможность автоматического перепрограммирования (адаптации) в зависимости от среды. Изначально задаются только основы программы.
- Интеллектуал. Задача вводится в общей форме, и робот может принимать решения или планировать свои действия в неопределенной или сложной среде, которую он распознает.


Интеллектуальные роботы
Принято считать, что интеллектуальный робот имеет так называемую модель внешнего мира или внутренней среды, которая позволяет роботу действовать в неопределенной информационной среде. Если эта модель реализована в виде базы знаний, то целесообразно, чтобы эта база знаний была динамической. При этом коррекция правил поведения робота в условиях изменяющейся среды естественным образом реализует механизмы самообучения и адаптации. Таким образом, интеллектуальный робот — это робот, включающий в себя инновационную систему управления (ИС). ИС означает компьютерную систему для решения задач, которые человек не может решить в режиме реального времени, либо их решение требует автоматизированной поддержки или дает результаты, сравнимые с решениями человека. При этом среди прочего подразумевается, что для решаемых задач ИС не предполагает полноты знаний, а сама ИС должна иметь возможность: упорядочивать данные и экспертизу с выделением существенных параметров; учиться на положительных и отрицательных примерах, приспосабливаться к изменениям набора фактов и знаний и т. д. Если определить интеллект робота более простыми словами, то система может решать задачи, сформулированные в общем виде. Итак, несмотря на множество предложенных критериев интеллекта, самым строгим требованием остается то, что роль человека при взаимодействии с ИС должна сводиться лишь к постановке задачи.
д. Если определить интеллект робота более простыми словами, то система может решать задачи, сформулированные в общем виде. Итак, несмотря на множество предложенных критериев интеллекта, самым строгим требованием остается то, что роль человека при взаимодействии с ИС должна сводиться лишь к постановке задачи.
Архитектура интеллектуальных роботов
На сегодняшний день считается, что интеллектуальный робот должен включать в себя: Приводы — это манипуляторы, ходовая часть и другие устройства, с помощью которых робот может воздействовать на окружающие его объекты. А по своей структуре это сложные технические устройства с сервоприводами, мехатронными частями, датчиками и системами управления. По аналогии с живыми организмами это руки и ноги робота. Сенсоры — это системы зрения, слуха, осязания, датчики расстояния, локаторы и другие устройства, позволяющие получать информацию из окружающего мира. Система управления — это мозг робота, который должен получать информацию от датчиков и управлять исполнительными механизмами. Эта часть робота обычно реализуется программным обеспечением. Система управления интеллектуальным роботом должна включать следующие компоненты: Модель мира – отражает состояние окружающего робота мира в терминах, удобных для хранения и обработки. Модель мира выполняет функцию запоминания состояния объектов мира и их свойств. Система распознавания – сюда входят системы распознавания изображений, распознавания речи и т. д. Задача системы распознавания – идентификация, т. е. «распознавание» объектов, окружающих робота, и их положение в пространстве. В результате компонентов системы распознавания строится модель мира. Система планирования действий выполняет «виртуальное» преобразование модели мира, чтобы получить какое-то действие. При этом обычно проверяется достижимость цели. Результатом работы по планированию действий является построение планов, т. е. последовательностей элементарных действий. Система выполнения действий — пытается выполнить запланированные действия, выдавая команды исполнительным механизмам и одновременно контролируя процесс выполнения.
Эта часть робота обычно реализуется программным обеспечением. Система управления интеллектуальным роботом должна включать следующие компоненты: Модель мира – отражает состояние окружающего робота мира в терминах, удобных для хранения и обработки. Модель мира выполняет функцию запоминания состояния объектов мира и их свойств. Система распознавания – сюда входят системы распознавания изображений, распознавания речи и т. д. Задача системы распознавания – идентификация, т. е. «распознавание» объектов, окружающих робота, и их положение в пространстве. В результате компонентов системы распознавания строится модель мира. Система планирования действий выполняет «виртуальное» преобразование модели мира, чтобы получить какое-то действие. При этом обычно проверяется достижимость цели. Результатом работы по планированию действий является построение планов, т. е. последовательностей элементарных действий. Система выполнения действий — пытается выполнить запланированные действия, выдавая команды исполнительным механизмам и одновременно контролируя процесс выполнения. Если выполнение элементарного действия оказывается невозможным, весь процесс прерывается, и необходимо произвести новое (или частично новое) планирование. Система целевого контроля – определяет иерархию, т. е. важность и порядок достижения поставленных целей. Существенными свойствами системы управления являются способность к обучению и адаптации, т. е. способность генерировать последовательности действий для поставленной цели и приспосабливать свое поведение к изменяющимся условиям внешней среды для достижения поставленных целей.
Если выполнение элементарного действия оказывается невозможным, весь процесс прерывается, и необходимо произвести новое (или частично новое) планирование. Система целевого контроля – определяет иерархию, т. е. важность и порядок достижения поставленных целей. Существенными свойствами системы управления являются способность к обучению и адаптации, т. е. способность генерировать последовательности действий для поставленной цели и приспосабливать свое поведение к изменяющимся условиям внешней среды для достижения поставленных целей.
Технологии искусственного интеллекта для интеллектуальных роботов
Интеллектуальные системы являются необходимым компонентом для решения задач создания модели мира, системы планирования действий и управления целями. База знаний в интеллектуальных системах является одной из основных частей модели мира и ее трансформационных функций. Распознавание изображений давно стало необходимой частью сложных роботизированных систем. Системы объемного зрения предоставляют информацию об ориентации объектов в пространстве. В настоящее время в этой области происходят значительные изменения. Распознавание и генерация речи необходимы для эффективного общения с людьми. Без этих технологий полноценный контакт с человеком невозможен. Значительные успехи были достигнуты в области генерации текстовой речи. С распознаванием речи дела обстоят хуже, потому что это более сложная задача.
В настоящее время в этой области происходят значительные изменения. Распознавание и генерация речи необходимы для эффективного общения с людьми. Без этих технологий полноценный контакт с человеком невозможен. Значительные успехи были достигнуты в области генерации текстовой речи. С распознаванием речи дела обстоят хуже, потому что это более сложная задача.
Мультиагентные системы используются для коллективного управления множеством роботов, которые могут работать индивидуально или в команде.
Управление интеллектуальным роботом
Операции выполняются интеллектуальным роботом в следующей последовательности:
- составляется план операций,
- с учетом распознавания условий труда и состояния объекта определяется порядок выполнения операций,
- активируются приводы робота.
В отличие от интеллектуальных роботов, у обычных роботов план операций и порядок действий зависят от волевого решения человека-оператора, а срабатывание исполнительных механизмов происходит автоматически.
Характерной чертой интеллектуальной системы управления роботом является наличие у нее функции распознавания объекта и его состояния с помощью сенсорных устройств и определения (на основе этой информации и команд, полученных от оператора) действий, которые необходимо выполнить. По сути, это делает робота универсальным и способным адаптироваться к окружающей среде, а также обеспечивает простое управление роботом.
Основными пунктами в системе управления интеллектуальным роботом являются:
- управление исполнительными механизмами,
- устройства распознавания и обнаружения,
- обработка команд и принятие решений.
Обмен информацией между человеком и интеллектуальным роботом
Распознающие и сенсорные устройства
Интеллектуальный робот в первую очередь должен обладать способностью адаптироваться к окружающей среде. При этом, конечно, существенную роль играют сенсорные устройства, воспринимающие внешнюю информацию.
Области применения интеллектуальных роботов огромны. Их можно использовать как в промышленности, так и в научных исследованиях. В зависимости от предполагаемого использования робота требуется широкий спектр сенсорных устройств. Здесь мы ограничим наше обсуждение сенсорными устройствами и системами распознавания образов для промышленных роботов, которые в основном выполняют погрузочно-разгрузочные операции.
- а) Сенсорные устройства, необходимые для интеллектуальных промышленных роботов. Можно выделить следующие три основных типа сенсорных устройств:
приборы технического зрения,
слуховые аппараты,
сенсорные устройства.
Основными сенсорными устройствами, необходимыми интеллектуальному роботу, являются как бы три чувства.
- б) Функция распознавания интеллектуального робота. Сигналы, принимаемые сенсорными устройствами, обычно представляют собой информацию, соответствующую некоторому «образу». На основании «этой информации можно идентифицировать признаки объекта и произвести необходимые измерения изображения».
 На основании «этой информации можно идентифицировать признаки объекта и произвести необходимые измерения изображения».
На основании «этой информации можно идентифицировать признаки объекта и произвести необходимые измерения изображения».При распознавании объектов с помощью приборов зрения и слуха различают распознавание самого предмета операции и распознавание сигналов оператора. Во втором случае речь идет о славе записанных звонков, например, на бумаге в виде букв или графиков, или о распознавании знаков, которые подает голос.
- Устройства технического зрения. Визуальную информацию об изображении можно получить, используя в качестве устройства ввода телевизионную камеру. Также планируется использовать устройства, в которых лазерные лучи будут использоваться в качестве устройства визуального ввода.
Информация для распознавания в основном представляет собой светотеневую (контрастную) информацию, но также может использоваться информация о цвете и информация о положении (по светящимся точкам на изображении).
Распознанные объекты являются трехмерными объектами. Процесс распознавания протекает следующим образом (последовательность:
Процесс распознавания протекает следующим образом (последовательность:
- предобработка (контурное изображение),
- признание,
- измерение (необходимых параметров объекта, например, его размера, местоположения и т. д.).
В проблеме распознавания есть много вопросов, представляющих большой интерес, таких как распознавание сложных форм, распознавание объектов, когда одни расположены поверх других и т. д.
Чтобы интеллектуальный робот функционировал, он должен «понимать» его окружение. Робот запоминает реальный мир своей территории в виде какой-то модели, но одного зрения недостаточно для оценки окружения.
Слуховые аппараты. Слуховые аппараты чаще используются для измерения и обнаружения, чем для распознавания образов. В дополнение к ультразвуковым измерениям местоположения и размеров объектов слуховые аппараты используются для распознавания окончания операций и обнаружения необычных шумов путем улавливания звуков и шумов на рабочем месте с помощью микрофонов.
Сенсорные устройства. Они в основном используются для определения местоположения и прямого измерения. Однако помимо этого тактильная информация может использоваться для распознавания состояния поверхности предметов и их свойств (массы, упругости и т. д.).

Обработка команд и принятие решений
Интеллектуальный робот составляет план операций и выполняет работу на основе команд, отдаваемых человеком-оператором, и результатов распознавания. Приказы, отдаваемые роботу, могут иметь самые разные формы: от простых и конкретных до вполне абстрактных. Что касается методов использования результатов распознавания, то они также могут быть самыми разными: от изменения программ с помощью простых датчиков, придающих роботу некоторые свойства адаптации, до автоматического выполнения эвристического программирования.
Обмен информацией между человеком и интеллектуальным роботом
Для выполнения операций с помощью интеллектуального робота необходим обмен информацией между человеком и роботом. У интеллектуальных роботов есть существенная разница в «уровнях интеллекта». В соответствии с этим существуют средства обмена информацией, соответствующие тому или иному уровню. В информационном обмене между человеком и интеллектуальным роботом есть информация, которую человек должен передать роботу, и знания, которые интеллектуальный робот направляет человеку. Первый включает в себя команды, данные роботу, и обучающую информацию. Второй предоставляет человеку сообщения о ходе операций, окончании операций, результатах и т. д. или просьбы о помощи от человека. Визуальная и слуховая коммуникация может способствовать хорошему обмену информацией между интеллектуальным роботом и человеком. При оптическом прикосновении умный робот может получать информацию от человека, распознавая буквы, а также различая цифры и рисунки. Стандарт взаимной передачи информации сочетает в себе дисплей и световое перо. Преимущество визуальной коммуникации в том, что если человек использует буквы, рисунки, цифры и т.
У интеллектуальных роботов есть существенная разница в «уровнях интеллекта». В соответствии с этим существуют средства обмена информацией, соответствующие тому или иному уровню. В информационном обмене между человеком и интеллектуальным роботом есть информация, которую человек должен передать роботу, и знания, которые интеллектуальный робот направляет человеку. Первый включает в себя команды, данные роботу, и обучающую информацию. Второй предоставляет человеку сообщения о ходе операций, окончании операций, результатах и т. д. или просьбы о помощи от человека. Визуальная и слуховая коммуникация может способствовать хорошему обмену информацией между интеллектуальным роботом и человеком. При оптическом прикосновении умный робот может получать информацию от человека, распознавая буквы, а также различая цифры и рисунки. Стандарт взаимной передачи информации сочетает в себе дисплей и световое перо. Преимущество визуальной коммуникации в том, что если человек использует буквы, рисунки, цифры и т. д. при отдаче команд или обучении, это помогает организовать его мышление. В слуховой коммуникации распознавание голоса является средством передачи информации. Используя методы синтеза речи, можно отдавать команды и обучать робота человеческим голосом. С точки зрения определения методов связи, перечисленных выше, важное значение имеет разработка оборудования для предварительной обработки информации и исследование информационной структуры и машинных языков.
д. при отдаче команд или обучении, это помогает организовать его мышление. В слуховой коммуникации распознавание голоса является средством передачи информации. Используя методы синтеза речи, можно отдавать команды и обучать робота человеческим голосом. С точки зрения определения методов связи, перечисленных выше, важное значение имеет разработка оборудования для предварительной обработки информации и исследование информационной структуры и машинных языков.
Значимые вехи в истории интеллектуальных роботов
Значительным шагом вперед в развитии техники и наиболее известными стали три «черепахи», созданные английским биофизиком и нейрофизиологом Г. Уолтером в 1950 — 1951 гг. самодвижущиеся электромеханические игрушки, способные ползти к свету или от него, избегать препятствий, заходить в «кормушку» для подзарядки севших батарей и тому подобное. «Черепашки» продемонстрировали способность к обучению, несмотря на простое устройство и аналоговую систему управления; «черепахи» проявляли обучающие свойства.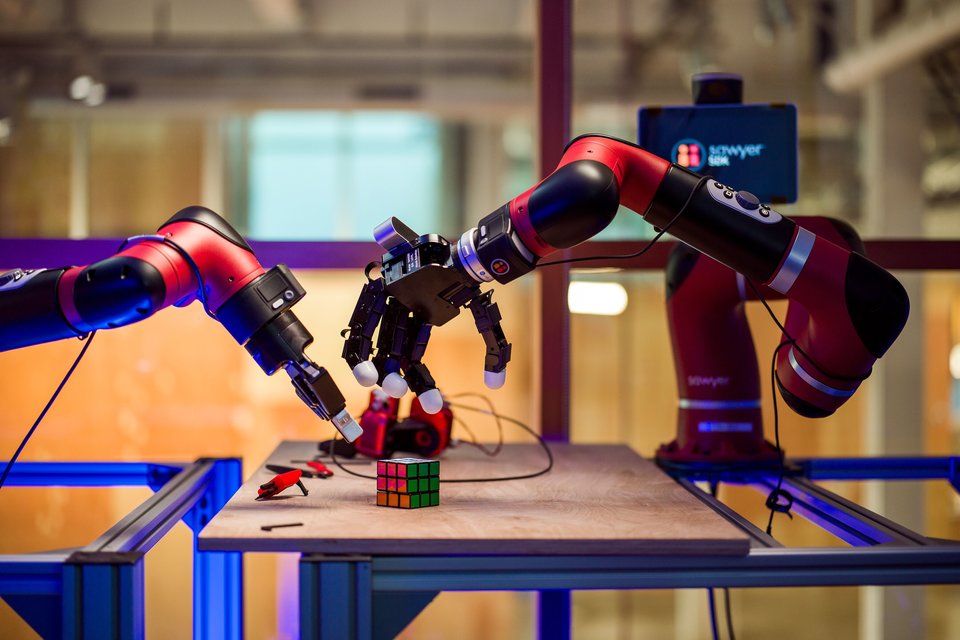 Появление интеллекта у роботов связано с развитием компьютера. Робот «Shakey» был создан в 1969 в Стэнфордском научно-исследовательском институте (США) и назывался тогда интегральным роботом или мобильным автоматом, использующим принципы искусственного интеллекта. Этот робот состоял из подвижной части, компьютера и соответствующего программного обеспечения. Робот был разработан для изучения процессов управления в реальном времени в сложной среде. Все функции, которые должен выполнять робот, можно разделить на три класса: решение задач, восприятие и моделирование. Система управления роботом, обслуживающая решение задач, использует информацию, записанную в модели, для планирования и расчета последовательности действий. По мере изменения окружающей среды активными движениями самого робота или по другим причинам модель должна трансформироваться, чтобы запомнить эти изменения. Кроме того, в модель необходимо добавить новую актуальную информацию об окружающей среде, которую робот получает по мере ее изучения.
Появление интеллекта у роботов связано с развитием компьютера. Робот «Shakey» был создан в 1969 в Стэнфордском научно-исследовательском институте (США) и назывался тогда интегральным роботом или мобильным автоматом, использующим принципы искусственного интеллекта. Этот робот состоял из подвижной части, компьютера и соответствующего программного обеспечения. Робот был разработан для изучения процессов управления в реальном времени в сложной среде. Все функции, которые должен выполнять робот, можно разделить на три класса: решение задач, восприятие и моделирование. Система управления роботом, обслуживающая решение задач, использует информацию, записанную в модели, для планирования и расчета последовательности действий. По мере изменения окружающей среды активными движениями самого робота или по другим причинам модель должна трансформироваться, чтобы запомнить эти изменения. Кроме того, в модель необходимо добавить новую актуальную информацию об окружающей среде, которую робот получает по мере ее изучения. В 1969 года Электротехническая лаборатория (Япония) приступила к разработке проекта «промышленного интеллектуального робота». Цель состояла в том, чтобы создать робота с искусственным интеллектом для выполнения сборочных работ с визуальным контролем. Манипулятор робота имеет шесть степеней свободы и управляется мини-ЭВМ (основная память 32000 слов, внешняя магнитная память 273000 слов). Манипулятор оснащен тактильными датчиками. В качестве системы визуального восприятия используются две телекамеры, оснащенные красно-зелено-синими фильтрами для распознавания цвета объектов. Робот мог распознавать простые предметы, ограниченные плоскостями и цилиндрическими поверхностями при специальном освещении. В 1972-1975 г. Киевский институт кибернетики создал модель транспортного автономного интегрированного робота (ТАИР). Робот продемонстрировал целенаправленное движение в естественной среде, обход препятствий и т. д. Конструктивно ТАИР представлял собой трехколесную самоходную тележку, оснащенную системой датчиков: оптическим дальномером, навигационной системой с двумя радиомаяками и компасом, контактным датчики, датчики угла поворота тележки, таймер и др.
В 1969 года Электротехническая лаборатория (Япония) приступила к разработке проекта «промышленного интеллектуального робота». Цель состояла в том, чтобы создать робота с искусственным интеллектом для выполнения сборочных работ с визуальным контролем. Манипулятор робота имеет шесть степеней свободы и управляется мини-ЭВМ (основная память 32000 слов, внешняя магнитная память 273000 слов). Манипулятор оснащен тактильными датчиками. В качестве системы визуального восприятия используются две телекамеры, оснащенные красно-зелено-синими фильтрами для распознавания цвета объектов. Робот мог распознавать простые предметы, ограниченные плоскостями и цилиндрическими поверхностями при специальном освещении. В 1972-1975 г. Киевский институт кибернетики создал модель транспортного автономного интегрированного робота (ТАИР). Робот продемонстрировал целенаправленное движение в естественной среде, обход препятствий и т. д. Конструктивно ТАИР представлял собой трехколесную самоходную тележку, оснащенную системой датчиков: оптическим дальномером, навигационной системой с двумя радиомаяками и компасом, контактным датчики, датчики угла поворота тележки, таймер и др.
Применение интеллектуальных роботов
Промышленные роботы начали широко внедряться в производственную сферу в семидесятых годах прошлого века. Эти роботы управлялись автоматически с помощью систем числового программного управления. Использование адаптивных элементов позволило расширить возможности промышленных роботов.
Автомобильная и электронная промышленность являются основными потребителями в области промышленной робототехники. В настоящее время выпускается множество различных типов промышленных роботов для манипуляций, сварки, покраски, упаковки, шлифовки, полировки и т. д. с широким спектром применения с точки зрения точности и характера выполняемых операций.
Военные роботы
Хорошим примером является программа, реализуемая Агентством перспективных оборонных исследовательских проектов (DARPA), ведущим исследовательским центром Министерства обороны США. Суть его в создании армии роботов. По мнению экспертов, переход на полноценную робототехническую армию должен произойти к 2025 году. Благодаря внедрению роботов исключается самый критический фактор боевых действий — присутствие на поле боя живых солдат. С помощью спутниковой связи такой армией можно управлять из любой точки мира. Уже доступны беспилотные летательные аппараты, легкое и среднее наземное вооружение. Вскоре будет доступно новое поколение тяжелобронированных машин.
По мнению экспертов, переход на полноценную робототехническую армию должен произойти к 2025 году. Благодаря внедрению роботов исключается самый критический фактор боевых действий — присутствие на поле боя живых солдат. С помощью спутниковой связи такой армией можно управлять из любой точки мира. Уже доступны беспилотные летательные аппараты, легкое и среднее наземное вооружение. Вскоре будет доступно новое поколение тяжелобронированных машин.
Охранные роботы
В настоящее время эти типы роботов широко используются для обеспечения безопасности. Модульный робот-разведчик использовался на чемпионате мира по футболу 2006 года в Германии. Всего во время чемпионата мира на берлинском Олимпийском стадионе единовременно присутствовало не менее 20 таких машин.
В последние годы беспилотные летательные аппараты (БПЛА) активно используются в различных странах для обеспечения внутренней безопасности – от патрулирования границ, портов, трубопроводов и других стратегических объектов до наблюдения за населением.
Бытовые роботы
Домашние роботы становятся таким же атрибутом домашнего хозяйства, как телевизор или холодильник. Ежегодно разрабатываются новые и усовершенствованные модели домашних помощников. Благодаря этому ценовая тенденция последних лет имеет нисходящий характер, и они становятся все более доступными для широких слоев населения.
Робототехника в Японии — не последнее место, где создаются роботы-помощники. Эксперты отмечают, что на повестке дня стоит задача масштабного исследования проблемы сосуществования человека, робота и помощника, включая ее психологические и социальные аспекты.
Роботы для игр и развлечений в последние годы набирают популярность. Создается много разных игрушек-роботов для разных возрастов.
Медицинские роботы
Медицинские роботы становятся неотъемлемой частью современных клиник. Хирургическая система da Vinci от Intuitive Surgical получила широкое распространение. Это точный манипулятор для врачей. Система точно контролирует его движения и «видит» трехмерное изображение, что помогает сделать операцию гораздо менее болезненной. А это, в свою очередь, способствует более быстрому выздоровлению, делая процесс лечения доступнее и дешевле.
Это точный манипулятор для врачей. Система точно контролирует его движения и «видит» трехмерное изображение, что помогает сделать операцию гораздо менее болезненной. А это, в свою очередь, способствует более быстрому выздоровлению, делая процесс лечения доступнее и дешевле.
В Японии домашние роботы широко используются для ухода за пациентами, а в клиниках США машины применяются для доставки регистрационных карт, выдачи лекарств, проведения операций и других функций.
Космические роботы
Космические роботы проводят исследования космоса и других планет. Автоматизированные межпланетные станции и планетоиды для изучения поверхности планет Солнечной системы по своей сути являются сложными роботами. Большая задержка распространения радиосигнала практически исключает телеуправление в реальном времени, поэтому планетоход должен уметь принимать решения на месте, т. е. обладать свойствами интеллектуального робота.
Современное состояние и перспективы
Сегодня интеллектуальные роботы вышли из области чистой науки и стали такими же необходимыми элементами повседневной жизни, как телевидение и сотовая связь. Тем не менее, чтобы вызвать полноценный бум, необходимо преодолеть некоторые ключевые проблемы. Сохраняются трудности коммуникации и координации. Также необходимо разработать механизм захвата. Тем не менее, возможности роботов быстро развиваются. Согласно исследованиям, 1,5-килограммовый человеческий мозг может выполнять около 100 триллионов операций в секунду — почти в три раза больше, чем самый мощный компьютер в мире. Машины могут достичь такой вычислительной мощности. Однако роботу не нужны все возможности человеческого мозга, чтобы быть достаточно функциональным. Цифры продаж показывают масштаб происходящих изменений. По оценкам экспертов, объем рынка «бытовых роботов» в Японии, например, к 2025 году достигнет годового объема в 8 трлн иен (70 млрд долларов). Спрос на персональных и мобильных роботов постоянно растет. Сегодня мы живем в быстро меняющемся мире, неотъемлемой частью которого станут роботы с искусственным интеллектом. Мы не можем остановить эти изменения, но мы можем направить их на улучшение жизни человека.
Тем не менее, чтобы вызвать полноценный бум, необходимо преодолеть некоторые ключевые проблемы. Сохраняются трудности коммуникации и координации. Также необходимо разработать механизм захвата. Тем не менее, возможности роботов быстро развиваются. Согласно исследованиям, 1,5-килограммовый человеческий мозг может выполнять около 100 триллионов операций в секунду — почти в три раза больше, чем самый мощный компьютер в мире. Машины могут достичь такой вычислительной мощности. Однако роботу не нужны все возможности человеческого мозга, чтобы быть достаточно функциональным. Цифры продаж показывают масштаб происходящих изменений. По оценкам экспертов, объем рынка «бытовых роботов» в Японии, например, к 2025 году достигнет годового объема в 8 трлн иен (70 млрд долларов). Спрос на персональных и мобильных роботов постоянно растет. Сегодня мы живем в быстро меняющемся мире, неотъемлемой частью которого станут роботы с искусственным интеллектом. Мы не можем остановить эти изменения, но мы можем направить их на улучшение жизни человека.
IROS 2022–2022 Международная конференция IEEE/RSJ по интеллектуальным роботам и системам
Международная конференция IEEE/RSJ 2022 по интеллектуальным роботам и системам (IROS 2022) состоится 23–27 октября 2022 г. в Киотском международном конференц-центре , Киото, Япония. IROS — одна из крупнейших и наиболее влиятельных конференций по исследованиям в области робототехники в мире. Он представляет собой международный форум для международного исследовательского сообщества робототехники для изучения передовых рубежей науки и технологий в области интеллектуальных роботов и интеллектуальных машин. Тема IROS 2022 — «Воплощенный ИИ для симбиотического общества» . В дополнение к техническим сессиям и мультимедийным презентациям конференции IROS также проводят панельные дискуссии, форумы, семинары, учебные пособия, выставки и технические туры, чтобы обогатить плодотворные дискуссии между участниками конференции.
Для нас большая честь проводить Международную конференцию IEEE/RSJ по интеллектуальным роботам и системам 2022 года (IROS2022) в Киото, Япония.
Являясь одной из ведущих конференций сообщества робототехники, IROS всегда собирала вместе ведущих мировых ученых и исследователей, а также наиболее важные предприятия для обмена идеями и достижениями в этой области. Многие инновационные исследования и разработки в области интеллектуальных роботов и систем исторически были представлены на конференции IROS, и IROS 2022, посвященная 35-летнему юбилею своей истории, направлена на то, чтобы продвинуть технологии робототехники еще на один шаг в теме «Воплощенный ИИ для симбиотического общества». ». IROS 2022 представляет собой международный форум для глобального сообщества робототехники, чтобы исследовать передовые рубежи науки и технологий в области интеллектуальных роботов и систем.
Киото, основанный в 794 году, уже более тысячелетия процветает как столица Японии. Город сохранил свою утонченную культуру, исторические памятники и бесчисленные синтоистские святыни и буддийские храмы, продолжая очаровывать посетителей со всего мира. Киото всегда был центром культуры и технологических инноваций на протяжении долгой истории города, где 47 университетов, многочисленные исследовательские институты и дальновидные корпорации с гордостью поддерживают киотские традиции инноваций на мировой арене. Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР.
Киото всегда был центром культуры и технологических инноваций на протяжении долгой истории города, где 47 университетов, многочисленные исследовательские институты и дальновидные корпорации с гордостью поддерживают киотские традиции инноваций на мировой арене. Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР.
Оргкомитет IROS 2022 приложит все усилия, чтобы сделать это мероприятие плодотворным и запоминающимся, даже несмотря на то, что мы все еще страдаем от пандемии COVID-19 и в беспрецедентных и сложных обстоятельствах.
Мы сердечно приглашаем вас на IROS 2022 и приветствуем вас в Киото, историческом, культурном и инновационном городе постпандемической эпохи.
Генеральный председатель: Shugen Ma
Являясь одной из ведущих конференций сообщества робототехники, IROS всегда собирала ученых, исследователей, студентов и ключевые предприятия в области робототехники со всего мира для обмена идеями и достижениями в этой области. Исторически на конференции IROS представлялось множество инновационных исследований и разработок в области интеллектуальных роботов и систем. IROS 2022 – мероприятие, посвященное 35 летию в ее истории – призвано продвинуть технологии робототехники еще на один шаг вперед с темой «Воплощенный ИИ для симбиотического общества», предоставив международный форум для глобального сообщества робототехники, чтобы исследовать границы науки и техники в интеллектуальные роботы и системы.
Исторически на конференции IROS представлялось множество инновационных исследований и разработок в области интеллектуальных роботов и систем. IROS 2022 – мероприятие, посвященное 35 летию в ее истории – призвано продвинуть технологии робототехники еще на один шаг вперед с темой «Воплощенный ИИ для симбиотического общества», предоставив международный форум для глобального сообщества робототехники, чтобы исследовать границы науки и техники в интеллектуальные роботы и системы.
Город-организатор IROS 2022, Киото, основанный в 794 году, уже более тысячелетия процветает как столица Японии. Город сохранил свою утонченную культуру, исторические места и бесчисленные синтоистские святыни и буддийские храмы, продолжая очаровывать посетителей со всего мира. Киото всегда был центром культуры и технологических инноваций на протяжении долгой истории города, где 47 университетов, многочисленные исследовательские институты и дальновидные корпорации с гордостью поддерживают традиции Киото в области инноваций на мировой арене. Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР (Целями устойчивого развития).
Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР (Целями устойчивого развития).
На конференцию IROS в этом году мы получили в общей сложности 3579 статей, в том числе 2288 обычных статей и 1291 работу в Robotics and Automation Letters (RA-L) с опцией IROS из 57 стран и регионов. После тщательного изучения статей в программу IROS было принято 1716 статей, что составляет 47,9%. Кроме того, было подано 128 заявок, состоящих только из рефератов, для плакатов с последними результатами и 80 заявок на семинары и учебные пособия. Итоговая программа должна включать 1765 докладов, в том числе 49статьи из журнальных публикаций TRO, TASE и RAM, для устных презентаций на 205 технических сессиях в течение трех дней, 124 постеров с последними результатами и 43 семинара и учебных пособий.
Техническая программа IROS 2022 включает три пленарных доклада и пятнадцать основных презентаций по темам, посвященным теме конференции и представляющим последние достижения в области интеллектуальной робототехники и системных исследований. Чтобы отпраздновать 35-летие конференций IROS, подчеркнув некоторые важные достижения, всемирно признанные первооткрыватели в этой области. Мы верим и желаем, чтобы у IROS были годы, чтобы преуспеть в нашей миссии, чтобы принести пользу научному и инженерному сообществу и обществу в целом.
Чтобы отпраздновать 35-летие конференций IROS, подчеркнув некоторые важные достижения, всемирно признанные первооткрыватели в этой области. Мы верим и желаем, чтобы у IROS были годы, чтобы преуспеть в нашей миссии, чтобы принести пользу научному и инженерному сообществу и обществу в целом.
Из-за пандемии COVID-19 IROS 2020 и 2021 успешно прошли онлайн, поэтому мы не собирались лично два года. Мы признаем важность и ценность встреч на местах, которые объединяют нас для физических встреч, особенно для новичков в сообществе IROS. Затем оргкомитет IROS 2022 решил провести IROS как традиционную очную конференцию. Виртуальное участие также будет вариантом для тех, у кого есть ограничения на поездки в их организации или кто не чувствует себя комфортно, участвуя в больших собраниях, с учетом того, что конференцию нельзя полностью ощутить в удаленном режиме. Мы постараемся сделать личное мероприятие плодотворным и запоминающимся, соблюдая необходимые меры предосторожности.
От имени организационного комитета мы сердечно приветствуем вас на выставке IROS 2022 и позволяем нам встретиться в Киото, чтобы познакомиться с историческим, культурным и инновационным городом, а также поделиться и отметить последние достижения в области робототехники.
Генеральный председатель: Шуген Ма, Университет Рицумейкан, Япония
Руководитель программы: Ясуши Накаучи, Университет Цукуба, Япония студенты и ключевые предприятия, чтобы делиться идеями и достижениями в этой области. Исторически на конференции IROS представлялось множество инновационных исследований и разработок в области интеллектуальных роботов и систем. IROS 2022 – мероприятие, посвященное 35 летию в ее истории – призвано продвинуть технологии робототехники еще на один шаг вперед с темой «Воплощенный ИИ для симбиотического общества», предоставив международный форум для глобального сообщества робототехники, чтобы исследовать границы науки и техники в интеллектуальные роботы и системы.
Город-организатор IROS 2022, Киото, основанный в 794 году, уже более тысячелетия процветает как столица Японии. Город сохранил свою утонченную культуру, исторические места и бесчисленные синтоистские святыни и буддийские храмы, продолжая очаровывать посетителей со всего мира. Киото всегда был центром культуры и технологических инноваций на протяжении долгой истории города, где 47 университетов, многочисленные исследовательские институты и дальновидные корпорации с гордостью поддерживают традиции Киото в области инноваций на мировой арене. Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР (Целями устойчивого развития).
Киото всегда был центром культуры и технологических инноваций на протяжении долгой истории города, где 47 университетов, многочисленные исследовательские институты и дальновидные корпорации с гордостью поддерживают традиции Киото в области инноваций на мировой арене. Проведение IROS 2022 в Киото отражает фантастическое слияние между быстрым ростом в этой области, лучшими услугами для нашего общества и ЦУР (Целями устойчивого развития).
На конференцию IROS в этом году мы получили в общей сложности 3579 статей, в том числе 2288 обычных статей и 1291 работу в Robotics and Automation Letters (RA-L) с опцией IROS из 57 стран и регионов. После тщательного изучения статей в программу IROS было принято 1716 статей, что составляет 47,9%. Кроме того, было подано 128 заявок, состоящих только из рефератов, для плакатов с последними результатами и 80 заявок на семинары и учебные пособия. Итоговая программа должна включать 1765 докладов, в том числе 49статьи из журнальных публикаций TRO, TASE и RAM, для устных презентаций на 205 технических сессиях в течение трех дней, 124 постеров с последними результатами и 43 семинара и учебных пособий.
Техническая программа IROS 2022 включает три пленарных доклада и пятнадцать основных презентаций по темам, посвященным теме конференции и представляющим последние достижения в области интеллектуальной робототехники и системных исследований. Чтобы отпраздновать 35-летие конференций IROS, подчеркнув некоторые важные достижения, всемирно признанные первооткрыватели в этой области. Мы верим и желаем, чтобы у IROS были годы, чтобы преуспеть в нашей миссии, чтобы принести пользу научному и инженерному сообществу и обществу в целом.
Из-за пандемии COVID-19 IROS 2020 и 2021 успешно прошли онлайн, поэтому мы не собирались лично два года. Мы признаем важность и ценность встреч на местах, которые объединяют нас для физических встреч, особенно для новичков в сообществе IROS. Затем оргкомитет IROS 2022 решил провести IROS как традиционную очную конференцию. Виртуальное участие также будет вариантом для тех, у кого есть ограничения на поездки в их организации или кто не чувствует себя комфортно, участвуя в больших собраниях, с учетом того, что конференцию нельзя полностью ощутить в удаленном режиме. Мы постараемся сделать личное мероприятие плодотворным и запоминающимся, соблюдая необходимые меры предосторожности.
Мы постараемся сделать личное мероприятие плодотворным и запоминающимся, соблюдая необходимые меры предосторожности.
От имени организационного комитета мы сердечно приветствуем вас на выставке IROS 2022 и позволяем нам встретиться в Киото, чтобы исследовать исторический, культурный и инновационный город, а также поделиться и отметить последние достижения в области робототехники.
Генеральный председатель: Шуген Ма, Университет Рицумейкан, Япония
Руководитель программы: Ясуши Накаучи, Университет Цукуба, Япония0003 Инструкция для председателя сессии на IROS2022 и Инструкция по презентации на IROS2022 уже открыты.
20 октября 2022 г.: Выставка открыта.
16 октября 2022 г.: Общественные мероприятия открыто.
4 октября 2022 г.: Шоу «Вадаико» и «Ханаби» открыто.
3 октября 2022 г .: Мастерская каллиграфии «Сёдо» открыта.
27 сентября 2022 г. : Форум по этике открыт.
: Форум по этике открыт.
27 сентября 2022 г.: Большой форум открыт.
24 сентября 2022 г.: Технический тур открыт.
21 сентября 2022 г.: Промышленный форум открыт.
16 сентября 2022 г.: Мастерская икебаны открыта.
8 сентября 2022 г.: Форум женщин в инженерии открыт.
8 сентября 2022 г.: Инструкции по проведению презентаций лично и онлайн уже открыты.
8 августа 2022 г.: Загрузка видеопрезентации и графического резюме открыта.
25 июля 2022 г.: Press открыта.
15 июля 2022 г.: Награда IROS для студентов и развивающихся стран открыта.
13 июля 2022 г.: Специальная лекция (COVID-19 и здоровье) уже открыта.
5 июля 2022 г.: Инструкции по подаче окончательного документа открыта.
5 июля 2022 г .: SICE SIYA-IROS2022 Awards открыт.
5 июля 2022 г.: Workshops and Tutorials открыт.
27 июня 2022 г.: Прием заявок на получение постеров с последними результатами открыт.
14 июня 2022 г.: Конкурс на номинацию открыт.
10 июня 2022 г.: Посещение лаборатории и Спонсоры уже открыты.
1 июня 2022 г.: Форум , посвященный 35-летию IROS, открыт.
26 мая 2022 г.: Основные докладчики уже открыты.
17 мая 2022 г.: Регистрация открыта.
6 мая 2022 г.: IROS 35th Anniversary уже открыт.
3 марта 2022 г .: Туристические достопримечательности Киото теперь открыты.
3 марта 2022 г.: Конкурс открыт.
20 февраля 2022 г.: FAQ теперь открыт.![]()