Содержание
Музыка в категории Роботы — лицензионная музыка для видео и мультимедиа проектов
Эмоция / Настроение
миксов: 8
Композитор
Aleksandar Dimitrijevic
Темп
Средний
0:00
3:22
Dark Dub / Hard electronica. Robotic / Futuristic / Mechanical. Funky Breakbeats / Machine like / Robotic. Great for body popping, funky robots, futuristic dance club, futuristic animations, etc.
- Индастриал
- Дабстеп
- Наука и Фантастика
- Молодежные
- Агрессивность
- Технологичные
- Темный
- Тревожная неизвестность
- Странные
- Механический
- Тревога
- Роботы
Standard License
миксов: 1
Композитор
Alex Khaskin
Темп
Средний
0:00
0:39
- Детская музыка
- Забавный / Смешной
- Механический
- Роботы
- Эксцентричный / забавный
Standard License
миксов: 6
Композитор
Damian Martin Turbull
Темп
Медленный
0:00
2:22
More of a groove, than a song. A monotoneous, ever grinding dark synth pulse, rough rock style drums and a dark, synthetic, almost poisonous groove. Rough and determined.
A monotoneous, ever grinding dark synth pulse, rough rock style drums and a dark, synthetic, almost poisonous groove. Rough and determined.
- Индастриал
- Даунтемпо
- Криминал / Гангстеры
- Наука и Фантастика
- Мистические
- Технологичные
- Темный
- Опасность
- Механический
- Грувы
- Крутой
- Роботы
Standard License
миксов: 10
Композитор
Wesley Devine
Темп
Средний
0:00
2:15
Glitchy malfunction sounds drop into masculine and funky synth bass groove, works well with gaming, robots, sci-fi adventures and technology advertising and promotion.
- Индастриал
- Прогрессив
- Криминал / Гангстеры
- Наука и Фантастика
- Динамичные
- Технологичные
- Решительность
- Темный
- Странные
- Механический
- Крутой
- Уверенный
- Роботы
Standard License
миксов: 3
Композитор
Anthony Clarkson
Темп
Средний
0:00
4:00
Industrial dance track laced with synths and techno effects. Quite fast.
Quite fast.
- Индастриал
- Наука и Фантастика
- Технологичные
- Механический
- Роботы
Standard License
миксов: 10
Композитор
Chris Southward
Темп
Медленный
0:00
2:28
Deep Minimal Dubstep, with glitchy garage influences. Moody and cranky, with a mystery feel.
Moody and cranky, with a mystery feel.
- Индастриал
- Брейкбит
- Наука и Фантастика
- Мистические
- Технологичные
- Темный
- Тревожная неизвестность
- Осторожный
- Странные
- Механический
- Подозрительность
- Роботы
- Запутанный
Standard License
миксов: 11
Композитор
Wesley Devine
Темп
Быстрый
0:00
2:46
Arpeggiated synths and mystical grooves. Weird and wonderful. Has an urgent sound, great for important info, technology, news reporting, cutting edge science, development etc.
Weird and wonderful. Has an urgent sound, great for important info, technology, news reporting, cutting edge science, development etc.
- Электронная
- Прогрессив
- Наука и Фантастика
- Мистика
- Мистические
- Технологичные
- Волнующие
- Темный
- Драматичность
- Тревожная неизвестность
- Механический
- Роботы
Standard License
миксов: 1
Композитор
Slip
Темп
Медленный
0:00
4:19
Builds up to a swinging piece with attitude. Great for 1970’s sequences or ultra modern urban scenes.
Great for 1970’s sequences or ultra modern urban scenes.
- Экспериментальная
- Хипхоп / Урбан
- Абстракция
- Странные
- Механический
- Грувы
- Роботы
Standard License
миксов: 11
Композитор
Stefan Bode
Темп
Средний
0:00
3:16
Edgy, mechanical, robotic sounding Dubstep / Dark Dub / Deepstep track, Available with or without ragga style vocals, Mechanoids / Future Tech / Cutting Edge / Grime.
- Индастриал
- Дабстеп
- Молодежные
- Мистические
- Технологичные
- Мощный / Могущественный
- Темный
- Опасность
- Механический
- Грувы
- Тревога
- Роботы
- Запутанный
Standard License
миксов: 2
Композитор
Andy Potterton
Темп
Медленный
0:00
3:00
Mechanical, regimented and modern. Almost robotic.
Almost robotic.
- Электронная
- Наука и Фантастика
- Информационные
- Технологичные
- Механический
- Роботы
Standard License
миксов: 12
Композитор
Krzysztof Rzeznicki
Темп
Средний
0:00
2:32
Calm intro section into Powerful and edgy, massive electro track. Power / Sci-fi / Future.
Power / Sci-fi / Future.
- Кинематография
- Дабстеп
- Экшен
- Драма
- Наука и Фантастика
- Агрессивность
- Динамичные
- Злость
- Напряженность
- Темный
- Драматичность
- Опасность
- Тревожная неизвестность
- Механический
- Роботы
- Пульсирующий
Standard License
миксов: 11
Композитор
Wesley Devine
Темп
Средний
0:00
3:01
Futuristic dubstep / rock like edgy breaks meets death metal, evil & foreboding, ideal for extreme sports, gaming & advertising.![]()
- Электро-рок
- Экшен
- Спорт
- Наука и Фантастика
- Динамичные
- Напряженность
- Технологичные
- Решительность
- Темный
- Механический
- Крутой
- Роботы
- Пульсирующий
Standard License
миксов: 10
Композитор
Stefan Bode
Темп
Средний
0:00
3:21
A larger-than-life Dubstep / Deepstep track with a very cosmic, grand sound, Interesting juxtapositioning of the hard, edgy, mechanical and grimy sounding synths and beats, with deeply floating, ethereal and sweeping strings/pads.
- Индастриал
- Дабстеп
- Наука и Фантастика
- Технологичные
- Темный
- Механический
- Роботы
- Запутанный
Standard License
миксов: 11
Композитор
Wesley Devine
Темп
Быстрый
0:00
2:50
A fast paced dubstep breaks track in the style of Prodigy meets Skrillex. Perfect for extreme sports and aggressive scenes, this track transitions from an atmospheric, almost eerie start into full on, in your face complextro/dubstepo.
Perfect for extreme sports and aggressive scenes, this track transitions from an atmospheric, almost eerie start into full on, in your face complextro/dubstepo.
- Брейкбит
- Дабстеп
- Экшен
- Молодежные
- Агрессивность
- Динамичные
- Безумие
- Технологичные
- Решительность
- Темный
- Подвижный
- Механический
- Грувы
- Роботы
- Запутанный
Standard License
миксов: 4
Композитор
Datasoul
Темп
Средний
0:00
6:28
Like atoms and ions dancing around, this track has bright twinkling melodies playing high above an energised drum track. Sprightly and light, this can add a vibrant, dynamic feel to your projects. Joyful and positive.
Sprightly and light, this can add a vibrant, dynamic feel to your projects. Joyful and positive.
- Электронная
- Ретро
- Светлые
- Веселые
- Счастливый
- Позитивные
- Механический
- Роботы
Standard License
Роботы-музыканты играют хеви-метал и выпускают альбомы.
 Видео / Хабр
Видео / Хабр
Проектов, соединяющих роботов и музыку, уже было очень много. Большинство из них относятся к категории «однодневок» и быстро надоедают публике. Но из этой массы выделяются несколько робогрупп — они существуют (или существовали) в течение довольно длительного времени, регулярно дают концерты и выпускают настоящие музыкальные альбомы. О них и пойдет речь.
Настоящий хеви-метал от Compressorhead
Авторы проекта: стараются себя не афишировать, но кампания на Kickstarter (о ней дальше) была запущена от имени Фрэнка Барнса, Маркуса Колба и Стока Плама
Место рождения: Берлин
Первые записи Compressorhead на YouTube относятся к 2013 году. Как и многие, эта робогруппа начинала с исполнения каверов на Motorhead, AC/DC и Black Sabbath. Сейчас Compressorhead можно назвать первым профессиональным робобендом — в том смысле, что они зарабатывают своей музыкой. Группа дала немало громких концертов и выступает на частных вечеринках (согласно информации на их сайте, существует возможность заказать такое выступление). С позиционированием у них тоже все хорошо. На том же сайте читаем: «These robots are willing to power up their circuits to play at meatbag gatherings, mechanical madness at your pleasure!» («Эти роботы готовы задействовать свои схемы, чтобы играть для скоплений мясных мешков, доставляя удовольствие от механического безумия!»).
С позиционированием у них тоже все хорошо. На том же сайте читаем: «These robots are willing to power up their circuits to play at meatbag gatherings, mechanical madness at your pleasure!» («Эти роботы готовы задействовать свои схемы, чтобы играть для скоплений мясных мешков, доставляя удовольствие от механического безумия!»).
В 2014-м группа приезжала в Москву, где в числе прочих сыграла кавер Smells Like Teen Spirit (примечательно, что в следующем году в Милане у них был совместный концерт с экс-супругой Курта, Кортни Лав).
Тогда в группе было всего 4 участника: барабанщик Stickboy, гитарист Fingers, бас-гитарист Bones и самый маленький робот, J.Schmidt, который играет на хай-хет. В 2015 году на Kickstarter была запущена кампания для сбора робота-вокалиста и записи первого альбома. Она с треском провалилась: из заявленных 290 тыс. евро было собрано чуть больше 40 тыс. Тем не менее, разработчики все-таки нашли деньги: кроме брутального Mega-Watson, группа дополнилась женщиной-роботом Helga Tarr.
Mega-Watson (масса робота — 350 кг)
В ноябре у Compressorhead вышел первый альбом, Party Machine. Он состоит из 15 песен, написанных преимущественно Джоном Райтом. На альбоме найдем кавер на Нэнси Синатру (These boots are made for rocking), а также песни Zombies vs. Robots, My Girlfriend`s a Robot и Fleisch (нем. «мясо»). Послушать можно здесь. Кстати, у каждого из поющих роботов был свой «тренер» по вокалу.
Группа активно гастролирует — проследить за перемещениями можно в официальной группе в FB. Кроме Москвы, концерты уже проходили в Германии, Норвегии, Мексике, Люксембурге и Литве. Путешествуют музыканты в таком виде:
Алкороботы Z-Machines
Авторы проекта: инженеры Университета Токио при финансовой поддержке производителя алкогольных напитков Zima
Место рождения: Токио
Еще одна группа, которая появилась в 2013-м, но в отличие от Compressorhead уже закончила свою карьеру (или взяла долгий тайм-аут). Z-Machines включала троих участников: гитариста Mach с 78 пальцами, шестирукого барабанщика Ashura (может играть вчетверо быстрее, чем человек) и клавишника Cosmo. Разработчики надеялись, что однажды их роботы смогут сыграть в космосе.
Z-Machines включала троих участников: гитариста Mach с 78 пальцами, шестирукого барабанщика Ashura (может играть вчетверо быстрее, чем человек) и клавишника Cosmo. Разработчики надеялись, что однажды их роботы смогут сыграть в космосе.
Проект Z-Machines был проспонсирован производителем алкогольных напитков Zima. Роботов запрограммировали так, чтобы они реагировали на поведение публики: когда на концерте посетители поднимали бутылки Zima, роботы начинали выдавать более мощный звук.
В 2014-м группа дала несколько концертов и выпустила мини-альбом из 5 песен Music For Robots (записан в соавторстве с британским электронным музыкантом Squarepusher — он же Томас Дженкинсон). Очевидно, после этого Zima потеряла интерес к проекту: последние записи Z-Machines на YouTube датируются 2014-м годом, а последний пост в официальном сообществе в FB — в 2015-м.
Automatica: не только гуманоиды
Автор проекта: Найджел Стэнфорд
Место рождения: Нью-Йорк
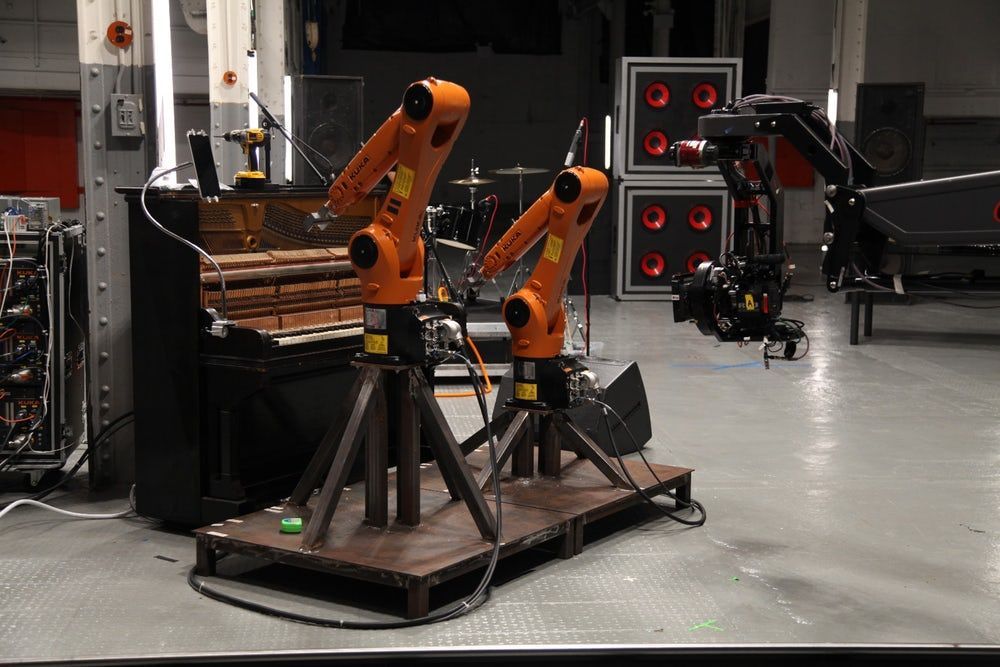
Видеоклип проекта Automatica появился на YouTube в начале осени. Вместе с ним был выпущен полноформатный альбом из 13 песен (продается здесь). В отличие от предыдущих двух групп, в этом проекте на музыкальных инструментах играют промышленные роботы Kuka. Найджел каким-то образом смог убедить компанию одолжить ему трех роботов, и в течение месяца обучал их в своем гараже. По его словам, все настройки он делал полностью самостоятельно.
Вместе с ним был выпущен полноформатный альбом из 13 песен (продается здесь). В отличие от предыдущих двух групп, в этом проекте на музыкальных инструментах играют промышленные роботы Kuka. Найджел каким-то образом смог убедить компанию одолжить ему трех роботов, и в течение месяца обучал их в своем гараже. По его словам, все настройки он делал полностью самостоятельно.
Для уроженца Новой Зеландии Найджела Стэнфорда это не первый экспериментаторский проект. В 2014-м он выпустил альбом Solar Echoes и снял для его продвижения клип Cymatics (потрясающе красивый — если вы еще не видели, то посмотрите).
Выход второго альбома Automatica кажется сомнительным: эффект новизны пропадет, и Найджел постарается удивить нас чем-нибудь другим.
Скромный инноватор Shimon
Авторы проекта: инженеры Центра музыкальных технологий Технологического университета Джорджии
Место рождения: Атланта
Робот-музыкант Shimon играет на маримбе — африканской разновидности ксилофона. Его создали 7 лет назад для аккомпанирования джазовым музыкантам. С тех пор он отметился выступлениями в Мюнхене, Вашингтоне, Сиэтле, Сан-Франциско и Токио. Но самое главное в этом роботе — не его концертные сборы, а приобретенная недавно возможность «сочинять музыку».
Его создали 7 лет назад для аккомпанирования джазовым музыкантам. С тех пор он отметился выступлениями в Мюнхене, Вашингтоне, Сиэтле, Сан-Франциско и Токио. Но самое главное в этом роботе — не его концертные сборы, а приобретенная недавно возможность «сочинять музыку».
В этом году Шимон научился импровизации: он единственный из подборки сочиняет собственные мелодии. Его обучали этому на примере 5000 песен и 2 млн музыкальных отрывков. Образцы относились к разным музыкальным стилям: поп-музыке, джазу и классике. К примеру, в базу для обучения входили произведения Леди Гаги, Битлз и Бетховена. Теперь по заданным музыкантами нотам Шимон может генерировать музыкальные отрывки длиной по 30 секунд.
Благодаря этому усовершенствованию Шимон теперь чаще появляется на конференциях, чем на музыкальных фестивалях.
Нужны ли миру роботы-музыканты и зачем тратить время на их обучение, когда есть столько живых групп, рвущихся к славе? Может, и не нужны. Но шоу с их участием смотрится действительно зрелищно — во всяком случае, пока не пройдет эффект новизны. А за эмоциями и душевностью можно сходить на концерт любимой группы «человеческих мешков».
А за эмоциями и душевностью можно сходить на концерт любимой группы «человеческих мешков».
Роботы и музыка | Colta.ru
Роботы и музыка | Colta.ru
18 марта 2015Colta SpecialsЛекторий Политеха
16030
Была ли крокоутка?Чем занимаются генетики?Кто на Луне главный?Как возникает лжеистория?Что делают медики на войне?Как рассказать о блокаде Ленинграда?Что придумал Толкин?Как возникла Вселенная и что с ней будет дальше?Как «Радио Свобода» сохранило запрещенную литературуКак спорт превратился в шоу-бизнес?Почему мы такие умные?Роботы и музыка
Медиахудожник Дмитрий ::vtol:: Морозов изложил историю робомузыки от Конлона Нанкарроу до робота-баяна в 13 видеороликах
В Лектории Политехнического музея выступил медиахудожник Дмитрий ::vtol:: Морозов. COLTA.RU публикует расшифровку его лекции «Роботы и музыка: от музыкальной шкатулки до роботизированных оркестров».
COLTA.RU публикует расшифровку его лекции «Роботы и музыка: от музыкальной шкатулки до роботизированных оркестров».
Для меня огромная честь пробовать читать эту лекцию. Признаюсь честно, для меня это новый опыт. То есть лекции я читаю довольно часто, но разговор на конкретно эту тему поднимаю впервые (несмотря на то, что сам я — художник и довольно давно занимаюсь темой роботов и звука). Причина простая: тема настолько многомерна, сложна и интересна, что пытаться поднять эту глыбу за один час — пустая трата времени. Я, как мог, фильтровал информацию, выделял лишь самые интересные проекты, вообще не старался их как-то друг с другом связывать. Сразу предупреждаю про нестандартный формат сегодняшней лекции — я бы ее назвал исторической ретроспективой с показом большого количества видеоматериала.
Начну с произведения американского композитора Конлона Нанкарроу — самого известного, самого почитаемого композитора-экспериментатора в мире.
 youtube.com/embed/f2gVhBxwRqg» frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/f2gVhBxwRqg» frameborder=»0″ allowfullscreen=»»>
Конлон Нанкарроу был первым в мире музыкантом, специально сочинявшим произведения, которые человек не мог исполнять в принципе. Он использовал самоиграющее фортепиано, его можно назвать предтечей современных роботов. Сами произведения он записывал не на нотных листах, а на специальных валиках-свитках с небольшими отверстиями по типу перфорации, каждое из которых отвечает за нажатие пальца. Разница между этим свитком и человеком в том, что пианист ограничен десятью пальцами — да и скорость его тоже имеет предел, так как пальцы очень близко друг к другу посажены, — а в пьесах Конлона одновременно могут звучать и двадцать, и тридцать, и сорок нот. И только механический объект может их сыграть. Нанкарроу не был признан при жизни — композиторские круги его отвергли, он был вынужден эмигрировать и до конца своих дней прожил в Мексике. И только в 1980-е годы медиаархеологи — историки музыки и искусства — возвели его в ранг культовых персонажей.
Надо сказать, что фортепиано было первым музыкальным инструментом, который подвергся механизации и роботизации в полной мере. И сейчас вы поймете — почему.
Как вы поняли, это автоматическое пианино, усложненное до целого оркестра. И несмотря на то, что вообще идея механических инструментов не предполагает участия человека, а здесь мы видим исполнителя, количество звука и сложность композиции так высоки, что роль человека здесь сведена не к исполнению, а к контролю, к управлению эти безумным ансамблем. Вы заметили, что человек не трогает клавиши, но постоянно жмет ногами на педали? Так он управляет огромным маховиком, который отвечает за ритм. А руками он приводит в действие сотни каких-то дополнительных приспособлений. Там у него и звуки, и свистки, и перкуссия, и барабаны. Вообще такие инструменты были придуманы с единственной целью — озвучивать немые фильмы и мультфильмы комедийно-развлекательного жанра. Как ни странно, идея препарировать фортепиано таким образом, чтобы превращать его в совершенно недосягаемый для человеческих возможностей инструмент, жива до сих пор, но только она трансформировалась отчасти из реальных фортепиано в виртуальные. В следующем видео инструмента как такового нет, а есть лишь визуализация того, как прописаны ноты. Мне кажется, это удобно и хорошо сделанная анимация, из которой понятен масштаб происходящего.
Как ни странно, идея препарировать фортепиано таким образом, чтобы превращать его в совершенно недосягаемый для человеческих возможностей инструмент, жива до сих пор, но только она трансформировалась отчасти из реальных фортепиано в виртуальные. В следующем видео инструмента как такового нет, а есть лишь визуализация того, как прописаны ноты. Мне кажется, это удобно и хорошо сделанная анимация, из которой понятен масштаб происходящего.
Обычно к таким видео пишут аннотации про то, сколько нот было использовано в композиции: например, 20 миллионов нот или 30 миллионов. И чтобы совсем добить тему механических фортепиано — и одновременно приблизиться к теме роботов, — я бы хотел показать проект американского художника Дэвида Боуэна под названием Cloud Piano. Куча механических приспособлений — в данном случае сервомоторов, нажимающих на клавиши, — плюс специальная камера, которая отслеживает движение облаков в небе и с помощью специальной программы отслеживает их форму, и в результате получается такая бесконечная музыка, которую играют облака, летящие по небу. Чем больше облаков, тем больше нот. Если облака полностью закроют небо, все клавиши будут нажаты, если небо будет ясным, то вообще ни одной клавиши не будет нажато.
Чем больше облаков, тем больше нот. Если облака полностью закроют небо, все клавиши будут нажаты, если небо будет ясным, то вообще ни одной клавиши не будет нажато.
Швейцарский художник Жан Тингли, в общем, наш современник — он начал работать со звуковыми механическими скульптурами в 1950—1960-е годы. Тингли использовал в своих работах большое количество мусора, поэтому его работы в полной мере можно считать памятниками индустриальной эпохи. Он был одним из первых художников, начавших работать с кинетическими скульптурами, используя при этом электричество. Все его объекты исключительно со звуком.
Примерно в то же время, когда Жан Тингли возился со своим индустриальным мусором, немецкий художник Питер Фогель начал использовать в своих работах радиоэлектронные компоненты не только по их прямому назначению — всевозможные динамики, транзисторы, моторы, — но и в качестве формообразующих элементов. Сам он называл свои скульптуры «электронными партитурами». Совсем недавно вышел большой фильм о Фогеле. Я нашел фрагмент, в котором он рассказывает о том, как на его творчество влияло увлечение живописью и хореографией и как он совместил их в очень сложной системе. Фогель был пионером интерактивного искусства и автономных электронных звуковых устройств. Особенность его работ в том, что он стал задействовать фотоэлементы, которые позволяли использовать движение тела, свет и тень и управлять механизмами, не касаясь их. Такие сенсоры установлены, например, в метро на турникетах, которые не дают нам пройти, не заплатив. Но в данном случае они использованы в художественных целях. Большинство работ Питера Фогеля так и остались на уровне технологий 1960—1980-х годов, однако до сих пор выглядят очень актуально, звучат очень сложно и нестандартно. После выхода фильма, к счастью, о художнике и его творчестве снова заговорили, чего он, безусловно, заслуживает.
Сам он называл свои скульптуры «электронными партитурами». Совсем недавно вышел большой фильм о Фогеле. Я нашел фрагмент, в котором он рассказывает о том, как на его творчество влияло увлечение живописью и хореографией и как он совместил их в очень сложной системе. Фогель был пионером интерактивного искусства и автономных электронных звуковых устройств. Особенность его работ в том, что он стал задействовать фотоэлементы, которые позволяли использовать движение тела, свет и тень и управлять механизмами, не касаясь их. Такие сенсоры установлены, например, в метро на турникетах, которые не дают нам пройти, не заплатив. Но в данном случае они использованы в художественных целях. Большинство работ Питера Фогеля так и остались на уровне технологий 1960—1980-х годов, однако до сих пор выглядят очень актуально, звучат очень сложно и нестандартно. После выхода фильма, к счастью, о художнике и его творчестве снова заговорили, чего он, безусловно, заслуживает.
 com/video/19780802″ frameborder=»0″ webkitallowfullscreen=»» mozallowfullscreen=»» allowfullscreen=»»>
com/video/19780802″ frameborder=»0″ webkitallowfullscreen=»» mozallowfullscreen=»» allowfullscreen=»»>
В те же годы в Великобритании начал активно работать инженер с русскими корнями, потомок эмигрировавших аристократов Питер Зиновьев. Во всем мире он известен как изобретатель синтезаторов, многие из которых используются по сей день и являются эталонными инструментами 1960-х годов. По его собственным словам, синтезаторы он начал собирать, чтобы заработать деньги на создание студии электронной музыки. Известно, что он начал ее строить на небольшой лодке и потратил все свое наследство на ее создание. Зиновьев был одним из первых, кто стал писать компьютерные алгоритмы — не электронные аналоговые цепи, как у Фогеля, а именно программировать на собственноручно собранных компьютерах. В 1968 году вместе со своей командой Питер Зиновьев представил в большом академическом зале Queen Elizabeth Hall в Лондоне первое в мире произведение, полностью исполненное кибернетической системой. Следующее видео — отрывок из большого фильма, рассказывающего про Зиновьева и созданную им студию EMS.
Следующее видео — отрывок из большого фильма, рассказывающего про Зиновьева и созданную им студию EMS.
Рассуждая о 1960-х и говоря о роботах, невозможно не упомянуть группу Kraftwerk. Сами они роботов не создавали, но заслугу их в деле популяризации робототехники переоценить трудно. Роботы были их постоянной фишкой начиная с первых концертов в начале 1970-х — роботами иногда заменяли самих участников группы, которые уже тогда выглядели одинаково. В какой-то момент фигуры исчезали и появлялись музыканты или наоборот. Следующее видео — это современный концерт, но у Kraftwerk последние лет сорок ничего особенно не меняется.
Что касается актуальности темы роботов в музыке. Все ведь наверняка знают о таком музыканте, как Aphex Twin, также известном как Ричард Д. Джеймс. Будучи культовой фигурой в электронной музыке 1990-х, он почти на десятилетие, если не больше, исчез со сцены и вообще не выпускал альбомов. И вот в течение буквально последних нескольких месяцев Aphex Twin стал главным ньюсмейкером, выпустив сразу несколько релизов. Одна из его новых пластинок так и называется «Computer Controlled Acoustic Instruments pt2». История очень интересная. Известно, что Aphex Twin долгое время ездил по миру и скупал всякие нестандартные музыкальные устройства у коллекционеров и у людей, к которым они случайно попали. Данный релиз — это результат работы музыканта с инструментами нидерландского художника и композитора-испытателя Годфрида-Уиллема Райса (Godfried-Willem Raes). Я не уверен, что это как-то указано на самом EP, но музыкальной общественности достоверно известно, что он использовал именно эти инструменты. В действительности Ричарда Д. Джеймса можно понять. Райс — один из самых нестандартных изобретателей музыкальных инструментов, они у него просто невероятные по размеру.
Джеймс. Будучи культовой фигурой в электронной музыке 1990-х, он почти на десятилетие, если не больше, исчез со сцены и вообще не выпускал альбомов. И вот в течение буквально последних нескольких месяцев Aphex Twin стал главным ньюсмейкером, выпустив сразу несколько релизов. Одна из его новых пластинок так и называется «Computer Controlled Acoustic Instruments pt2». История очень интересная. Известно, что Aphex Twin долгое время ездил по миру и скупал всякие нестандартные музыкальные устройства у коллекционеров и у людей, к которым они случайно попали. Данный релиз — это результат работы музыканта с инструментами нидерландского художника и композитора-испытателя Годфрида-Уиллема Райса (Godfried-Willem Raes). Я не уверен, что это как-то указано на самом EP, но музыкальной общественности достоверно известно, что он использовал именно эти инструменты. В действительности Ричарда Д. Джеймса можно понять. Райс — один из самых нестандартных изобретателей музыкальных инструментов, они у него просто невероятные по размеру. При этом он никогда не показывает их по отдельности, а строит целые инсталляции, механизированные оркестры, в которых присутствуют и струнные, и духовые, и перкуссионные инструменты. Я нашел несколько достаточно интересных видео. Понятно, что в интерпретации Aphex Twin это выглядит более систематизированно, но сам Райс мыслит категориями оркестра, и его собственные выступления, на мой взгляд, более красочные, чем концерты электронщика.
При этом он никогда не показывает их по отдельности, а строит целые инсталляции, механизированные оркестры, в которых присутствуют и струнные, и духовые, и перкуссионные инструменты. Я нашел несколько достаточно интересных видео. Понятно, что в интерпретации Aphex Twin это выглядит более систематизированно, но сам Райс мыслит категориями оркестра, и его собственные выступления, на мой взгляд, более красочные, чем концерты электронщика.
А вот оркестр Tao Mata (детям очень нравится), сделанный из конструктора Lego при помощи несложных электронных компонентов, которые сейчас настолько дешевы, что каждый человек может сделать что-то подобное у себя на столе. Присмотритесь, здесь используются самые простые электронные инструменты: недорогая драм-машина, маленький синтезатор. Все это довольно просто смонтировано. То есть, по сути, перед вами сейчас выступит настольный оркестр Lego.
Aphex Twin не единственный из современных электронных музыкантов, который использовал в работе роботов. Его сотоварищ Squarepusher совсем недавно выпустил альбом в коллаборации с Z-Machines, одной из самых мощных японских компаний, создающих почти промышленных по своему уровню музыкальных роботов, которые позволяют сочинять музыку, совершенно недоступную для воспроизведения человеком. При этом понятно, что роботы здесь выполняют чисто визуальную роль — нажимать на кнопки компьютера мог бы и человек. Но это бы лишило, безусловно, шоу какого-то эффекта реального присутствия. Я нашел и хотел бы показать гениальное, на мой взгляд, видео, в котором происходит битва японских роботов от Z-Machines и немецких от Compressor Head. Японцы против немцев — национальная школа очень сильно проглядывает.
 com/embed/h0DyYLLf3m8″ frameborder=»0″ allowfullscreen=»»/>
com/embed/h0DyYLLf3m8″ frameborder=»0″ allowfullscreen=»»/>
Чтобы было понятно, что и в России ведутся кое-какие работы в этой области, — видео 1988 года, программист Владимир Демин и его робот-баян. Я лично с ним незнаком и не был ни на одном его концерте (и сомневаюсь, что они у него были), но у всех его видео по несколько сотен тысяч просмотров, то есть он однозначно не отстает от мировой практики.
Видео: баян-робот, автор — программист Владимир Демин
И последнее видео на тему роботов и звука. Работа, получившая Golden Nica — высшую награду на фестивале Ars Electronica в 2013 году. Авторы — французские медиахудожники Андре и Мишель Декостер (André and Michel Décosterd). Тут надо оговориться: это не совсем автономная система, а некий гибрид, в котором девять живых певцов пристегнуты к роботизированным платформам. Платформы двигаются, меняя направление и как следствие звучание голосов певцов в специально приготовленном пространстве. Но это гениально, по-моему.
Но это гениально, по-моему.
И это пример того, как роботы могут сотрудничать с людьми. Вообще тема роботов в музыке настолько обширная, что моя лекция не претендует на то, чтобы быть исчерпывающей. Если вам эта тема интересна, обязательно копайте глубже — смотрите все, что найдете про каждого художника, о котором я рассказал. На этом пути вы неминуемо найдете еще имена и еще названия, и конца не будет вашему образованию по этой теме.
Видеозапись лекции смотрите на сайте Лектория Политеха
Записала Наталья Кострова
Понравился материал? Помоги сайту!
Тест
Все смешалось в доме Облонских
Тест к 145-летию с начала работы над «Анной Карениной». Сможете вспомнить парадоксы и нестыковки великого романа Толстого?
новости
11 марта 2022
14:52COLTA. RU заблокирована в России
RU заблокирована в России
3 марта 2022
17:48«Дождь» временно прекращает вещание
17:18Союз журналистов Карелии пожаловался на Роскомнадзор в Генпрокуратуру
16:32Сергей Абашин вышел из Ассоциации этнологов и антропологов России
15:36Генпрокуратура назвала экстремизмом участие в антивоенных митингах
Все новости
Новое в разделе «Colta Specials»Самое читаемое
От редакции COLTA.RU
97160
Культура во время «военных операций»
87874
Полифонические свидетели конца и начала. Эссе Ганны Комар
Эссе Ганны Комар
46322
Отделения
9946
Приход отца Александра Меня и позднесоветская интеллигенция
24113
Письмо папе
8212
Оливия Плендер. «История Королевства зверей»
13721
Что можно увидеть на выставке «Теле-трамплин»?
10814
Как эпоха застоя стала «золотым веком» детского телевидения в СССР
7930
Как Чебурашка за море ходил, или Кое-что о шведской детской культуре 70-х
16333
Лермонтов. Урановый след
Урановый след
12449
Теле-трамплин: от детского телевидения к современному искусству и литературе
7830
Сегодня на сайте
Colta Specials
От редакции COLTA.RU
Обращение к читателям
5 марта 202297160
Colta Specials
Культура во время «военных операций»
Нужны ли сейчас стихи, выставки и концерты? Блиц-опрос COLTA.RU
3 марта 202287874
Общество
Почему вина обездвиживает, и что должно прийти ей на смену?
Философ Мария Бикбулатова о том, что делать с чувствами, охватившими многих на фоне военных событий, — и как перейти от эмоций к рациональному действию
1 марта 202275067
Общество
Родина как утрата
Глеб Напреенко о том, на какой внутренней территории он может обнаружить себя в эти дни — по отношению к чувству Родины
1 марта 202253506
Литература
Often you write das Leid but read das Lied
Англо-немецкий и русско-украинский поэтический диалог Евгения Осташевского и Евгении Белорусец
1 марта 202251923
Общество
Письмо из России
Надя Плунгян пишет из России в Россию
1 марта 202264807
Colta Specials
Полифонические свидетели конца и начала. Эссе Ганны Комар
Эссе Ганны Комар
В эти дни Кольта продолжает проект, посвященный будущему Беларуси
1 марта 202246322
Театр
Случайность и неотвратимость
Зара Абдуллаева о «Русской смерти» Дмитрия Волкострелова в ЦИМе
22 февраля 202238732
Литература
«Меня интересуют второстепенные женские персонажи в прозе, написанной мужчиной»
Милена Славицка: большое интервью
22 февраля 202238657
Общество
Архитектурная история американской полиции
Глава из новой книги Виктора Вахштайна «Воображая город. Введение в теорию концептуализации»
22 февраля 202238072
Общество
Виктор Вахштайн: «Кто не хотел быть клоуном у урбанистов, становился урбанистом при клоунах»
Разговор Дениса Куренова о новой книге «Воображая город», о блеске и нищете урбанистики, о том, что смогла (или не смогла) изменить в идеях о городе пандемия, — и о том, почему Юго-Запад Москвы выигрывает по очкам у Юго-Востока
22 февраля 202247949
Искусство
Два мела на голубой бумаге
Что и как смотреть на выставке французского рисунка в фонде In Artibus
21 февраля 202241918
Обнаружение творчества в различных подходах к музыкальной робототехнике
Введение
Область музыкальной робототехники представляет собой интересный пример пересечения творчества и робототехники. Хотя потенциал машин для выражения творчества представляет собой важную проблему в области робототехники и искусственного интеллекта, эта тема особенно актуальна в случае машин, которые воспроизводят человеческую деятельность, традиционно связанную с творчеством, например, создание музыки. В нескольких недавних исследованиях изучалась история и современное состояние музыкальной робототехники. Хотя они представляют собой обзор области, они, как правило, сосредоточены в первую очередь на вопросах, связанных с функциональным дизайном, с небольшим обсуждением творчества. Музыкальные роботы подразделяются на категории в зависимости от того, как они производят звук (Kapur 2005), как они функционируют как интерактивные мультимодальные системы (Solis and Ng 2011), как они развивались на протяжении истории (Murphy et al., 2012; Long et al., 2017), и способы, которыми они занимаются «роботизированной музыкой» (Бретан и Вайнберг, 2016). 1
Хотя потенциал машин для выражения творчества представляет собой важную проблему в области робототехники и искусственного интеллекта, эта тема особенно актуальна в случае машин, которые воспроизводят человеческую деятельность, традиционно связанную с творчеством, например, создание музыки. В нескольких недавних исследованиях изучалась история и современное состояние музыкальной робототехники. Хотя они представляют собой обзор области, они, как правило, сосредоточены в первую очередь на вопросах, связанных с функциональным дизайном, с небольшим обсуждением творчества. Музыкальные роботы подразделяются на категории в зависимости от того, как они производят звук (Kapur 2005), как они функционируют как интерактивные мультимодальные системы (Solis and Ng 2011), как они развивались на протяжении истории (Murphy et al., 2012; Long et al., 2017), и способы, которыми они занимаются «роботизированной музыкой» (Бретан и Вайнберг, 2016). 1
Основываясь на обзоре существующей литературы, а также на опыте автора в разработке и написании музыки для музыкальных роботов, в этой статье предлагается новая структура классификации, основанная на способах, которыми музыкальные роботы выражают творчество через антропоморфную форму, способность к звуковым нюансам , управление и музыкальный вывод. Изучая область музыкальной робототехники с этой точки зрения, мы можем лучше понять, как конкретные подходы приводят к достижению как технических, так и художественных целей.
Изучая область музыкальной робототехники с этой точки зрения, мы можем лучше понять, как конкретные подходы приводят к достижению как технических, так и художественных целей.
Определения и критерии оценки
Определение музыкальной робототехники
Как дизайнеры, так и зрители используют термин «музыкальные роботы» или «роботы-музыкальные инструменты» для обозначения широкого спектра музыкальных машин. С инженерной точки зрения подходы, которым не хватает автономии, точнее было бы назвать «музыкальной мехатроникой» (Bretan and Weinberg, 2016). Однако популярная концепция роботов, уходящая корнями в мифологию, включает в себя любые машины, которые могут имитировать действия человека (Jones 2017; Szollosy, 2017). Поэтому в данном обсуждении «музыкальная робототехника» будет рассматриваться как любой подход, в котором электромеханический привод производит видимое физическое действие, моделирующее процесс создания музыки человеком, независимо от автономного управления.
Моделируя процесс создания музыки человеком, музыкальные роботы могут считаться антропоморфными по своей сути. Финк описывает важную связь между антропоморфизмом и робототехникой, выраженную через антропоморфную форму (внешний вид), поведение и взаимодействие с людьми (Fink, 2012). Хотя не все музыкальные роботы обладают антропоморфной формой, моделирование физических действий при создании музыки представляет собой антропоморфное поведение. То, как дизайнеры и зрители воспринимают антропоморфизм, существенно влияет на то, как эти машины выражают творчество. Помня об этой идее, я выделяю шесть подходов, по-разному выражающих креативность. К ним относятся: 1) неспециализированные антропоморфные роботы, умеющие играть на музыкальных инструментах, 2) специализированные антропоморфные роботы, моделирующие физические действия человека-музыканта, 3) полуантропоморфные роботы-музыканты, 4) неантропоморфные роботы-инструменты, 5) кооперативные музыкальные роботы, и 6) отдельные приводы, используемые для собственных возможностей воспроизведения звука.
Определение креативности
В настоящее время креативность сосредоточена в нескольких различных областях, включая эстетику, психологию и искусственный интеллект (Götz 1981; Bailin 1983; Boden, 1996; Boden, 2004; Cope 2005; Runco and Jaeger, 2012). Ранко и Джагер выделяют два основных критерия креативности: оригинальность и эффективность (Ранко и Джагер, 2012, 92). Оригинальность или творческое озарение возникает из того, что Коуп описывает как «инициализацию связей между двумя или более многогранными вещами, идеями или явлениями, которые до сих пор не считались активно связанными» (Коуп 2005, 11). Эффективность определяется посредством оценки творческого замысла создателем, а также связанными с ним сообществами (Боден, 1996, 268).
Критерии оценки креативности в музыкальной робототехнике
Музыкальные роботы, как правило, рассматриваются как творческие машины из-за их связи с музыкой, которая по своей сути является творческой деятельностью. В то время как исследования творческих способностей музыкальных роботов должны быть сосредоточены на музыке, которую они производят, оригинальность и эффективность также выражаются через антропоморфную форму, способность к звуковым нюансам, контролю, а также к музыкальному результату.
Антропоморфная форма
Внешний вид музыкальных роботов, а также то, как они моделируют человеческие действия при создании музыки, чрезвычайно важны для дизайнеров и зрителей. По словам Финка, «физическая форма робота сильно влияет на то, как люди его воспринимают и взаимодействуют с ним…» (Финк, 203). Финк также описывает важность антропоморфного поведения с точки зрения наблюдателя. «Если система ведет себя так же, как человек (например, издает человеческий голос), мысленная модель поведения системы людей может приблизиться к их ментальной модели людей», на основе оценки возможностей робота (Fink, 201). Некоторые подходы к музыкальной робототехнике сосредоточены на моделировании внешнего вида и движений человека, в то время как другие исследуют мехатронные методы производства звука, не обладающие антропоморфной формой. Оценка творчества с точки зрения антропоморфной формы требует понимания того, как дизайнеры и зрители приписывают человеческие качества форме и поведению музыкального робота.
Возможности для Sonic Nuance
Большая часть существующей литературы в области музыкальной робототехники посвящена способности роботов моделировать звуковые способности людей-исполнителей. Критерием успеха в этой области часто называют способность выразительно играть музыку (например, Murphy, 2014). В то время как дизайнеры часто описывают, как улучшения в параметрах управления звуком и их разрешение обеспечивают выразительность, концепция выразительности, как правило, определяется довольно расплывчато (Kemper and Cypess, 2019).). Следовательно, правильнее охарактеризовать эти функции как повышение способности воспринимать звуковые нюансы (Кемпер и Бартон, 2018). В то время как большая способность к звуковым нюансам позволяет музыкальным роботам более точно моделировать динамику, артикуляцию и фразировку людей-исполнителей, они также могут создавать новые звуковые и музыкальные возможности, которые отличаются от способов исполнения людьми (Kemper, 2014). Таким образом, творчество в этой области относится к новым подходам к звуковым нюансам либо для целей моделирования человеческого поведения, либо для изучения новых звуковых и музыкальных возможностей, уникальных для музыкальных роботов.
Управление
Музыкальными роботами можно управлять различными способами, от автономных режимов, которые позволяют взаимодействовать с людьми-исполнителями, до режимов, в которых движение каждого исполнительного механизма запрограммировано заранее. Одна из проблем оценки творчества в музыкальной робототехнике заключается в том, что системы управления часто отделяются от самого робота. Исследования в области искусственной генерации музыки и алгоритмов прослушивания, как правило, сосредоточены на генерации нот в общем виде (например, в виде MIDI-данных), а не на их адаптации к механическим требованиям конкретного робота (например, Cope 2005; Xia and Dannenberg). , 2015). Например, Солис и Нг Музыкальные роботы и интерактивные мультимодальные системы, разделены на два отдельных раздела, которые описывают управление и вывод соответственно (Solis and Ng, 2011). Хотя управление определяет, как работают приводы и, следовательно, как робот производит звук, важно отличать эти инструкции от фактического музыкального вывода.
Музыкальная продукция
Музыка, которую исполняют роботы, представляет собой важный способ выражения творчества; однако эта тема получила на удивление мало внимания. Некоторые роботы используют одно музыкальное произведение, чтобы продемонстрировать свои возможности, в то время как другие исполняют различные стили, сотрудничают в режиме реального времени с исполнителями-людьми и предназначены для творческих инструментов музыкальных исполнителей. 2 При оценке творчества в музыкальном произведении следует учитывать как исполнительские способности робота, так и музыкальные решения. Перформативные возможности включают в себя способность роботов демонстрировать впечатляющие результаты, либо моделируя людей-исполнителей, либо исследуя их собственные уникальные способности. Музыкальные решения включают в себя конкретные музыкальные произведения, сочиненные или аранжированные для роботов, принятие музыкальных решений автономными системами управления и то, как новая музыка, созданная для роботов (или ими), взаимодействует с уникальными возможностями этих машин.
Различные подходы к музыкальной робототехнике
Неспециализированные антропоморфные роботы, умеющие играть на музыкальных инструментах
За последние 2 десятилетия несколько компаний разработали антропоморфных двуногих роботов общего назначения, которые воспроизводят действия человека в различных областях, включая музыкальное исполнение (Госвами и Вадаккепат 2019). Например, Toyota модифицировала версии своего робота Partner для игры на трубе, скрипке и электронной ударной установке (Doi and Nakajima 2019).). Из этих подходов робот-трубач наиболее точно приближается к человеческим возможностям с точки зрения артикуляции, динамики и времени. И наоборот, робот, играющий на скрипке, ограничен в своем диапазоне и несколько борется с интонацией и тоном по сравнению с обученным скрипачом. 3 Это отражает трудности моделирования сложных физических действий, таких как давление смычка, скорость смычка, правильное положение пальцев и вибрато.
В целом, в этих демонстрациях предпочтение отдается показу универсальных человекоподобных роботов, занимающихся типично «человеческой» деятельностью, а не новой музыкальной продукции. Как заявляют Дои и Накадзима: «Мы начали разработку гуманоидного музыкального представления из любопытства, поскольку мы хотели бы заставить робота-гуманоида реализовать такую уникальную человеческую деятельность [9].0037 sic ]» (Дои и Накадзима, 218). Это подчеркивается тем фактом, что доступные видеоролики этих роботов исполняют легко узнаваемые версии популярной музыки, в том числе «When you Wish Upon a Star» и «Pump and Circumstance». 4 , 5 музыкальное исполнение, они становятся более специализированными в своей способности воспроизводить звуковые нюансы, как описано в примерах ниже.
Как заявляют Дои и Накадзима: «Мы начали разработку гуманоидного музыкального представления из любопытства, поскольку мы хотели бы заставить робота-гуманоида реализовать такую уникальную человеческую деятельность [9].0037 sic ]» (Дои и Накадзима, 218). Это подчеркивается тем фактом, что доступные видеоролики этих роботов исполняют легко узнаваемые версии популярной музыки, в том числе «When you Wish Upon a Star» и «Pump and Circumstance». 4 , 5 музыкальное исполнение, они становятся более специализированными в своей способности воспроизводить звуковые нюансы, как описано в примерах ниже.
Специализированные антропоморфные роботы, моделирующие физические действия людей-музыкантов
Несколько подходов были сосредоточены на создании роботов, которые моделируют физические действия, связанные с музыкальным исполнением. К ним относятся новаторские разработки Университета Васэда, включая робота-пианиста серии WABOT, робота-флейтиста серии WF и робота-саксофона серии WAS (Roads, 1986; Solis et al. , 2006; Solis and Hashimoto, 2010). Шибуя и Парк также создали роботизированные модели игры на скрипке (Shibuya et al., 2007; Park et al., 2016), а Шадефо создал роботизированный «палец» для игры на арфе (Chadefaux et al., 2012).
, 2006; Solis and Hashimoto, 2010). Шибуя и Парк также создали роботизированные модели игры на скрипке (Shibuya et al., 2007; Park et al., 2016), а Шадефо создал роботизированный «палец» для игры на арфе (Chadefaux et al., 2012).
Хотя эти подходы точно моделируют действия человека, они могут привести к отсутствию музыкальной «эффективности» по сравнению с музыкальными роботами, которые не моделируют человеческие действия (см. Неантропоморфные роботизированные инструменты ). Например, робот-флейтист Waseda WF-4RII обладает 43 степенями свободы, и каждый компонент робота спроектирован так, чтобы копировать человеческий аналог, включая «гуманоидные органы», такие как роботизированные губы, легкие, руки, шея, язык и полость рта (Solis et al. и др., 2006, 13). Моделируя действия человека при исполнении, робот помогает нам понять, как исполнители на инструментах производят музыкальные звуки. Однако сложность механической модели ограничивает звуковые возможности, доступные машинам, такие как сверхвиртуозная скорость и новые подходы к звуковым нюансам. Об этом свидетельствуют имеющиеся видеозаписи выступления, например, того, как WF-4RII исполняет «Полет шмеля» Римского-Корсакова в (человеческом) комфортном темпе около 150 ударов в минуту. 6
Об этом свидетельствуют имеющиеся видеозаписи выступления, например, того, как WF-4RII исполняет «Полет шмеля» Римского-Корсакова в (человеческом) комфортном темпе около 150 ударов в минуту. 6
Полуантропоморфные роботы-музыканты
Музыкальные роботы этой категории принимают антропоморфную форму, однако они не моделируют конкретные действия человека и больше сосредоточены на внешнем виде и музыкальном воспроизведении. За последние несколько десятилетий появилось несколько «групп» роботов, в том числе рок-группы The Trons, Captured! By Robots и Compressorhead , а также результат сотрудничества Z-Machines 7 и Squarepusher на альбоме 2014 года «Music for Robots». (Snake-Beings, 2017; Галлахер, 2017; Дэвис и Кросби, 2016; Squarepusher x Z-Machines, 2014). MOJA — барабанщик, арфист и флейтист, играющие в стиле, напоминающем традиционную китайскую музыку. 8 В дополнение к этим «группам» Robotic Musicianship Group в Технологическом институте Джорджии были разработаны два хорошо задокументированных полуантропоморфных музыкальных робота: Хайле, робот-барабанщик, и Шимон, робот-игрок на маримбе (Weinberg and Driscoll 2006; Weinberg и др. , 2020).
, 2020).
Антропоморфный характер этих роботов подчеркивается прежде всего их стилизованным внешним видом, а не попыткой моделировать человеческие действия перфоманса. Например, многорукий барабанщик «Stickboy» из набора Compressorhead имеет ирокез из металлических шипов и предназначен для тряски головой под музыку. Роботы MOJA одеты в одежду в стиле династии Тан. Эти варианты дизайна не имеют ничего общего со звуком, однако они усиливают связь между аудиторией и роботами-исполнителями.
Несмотря на то, что звуковые механизмы этих роботов не моделируют людей-исполнителей, большая часть музыки, которую они играют, может быть легко исполнена людьми. Единственным исключением из этого является подход Squarepusher , , который использует уникальные музыкальные возможности, предоставляемые роботами Z-Machines. В песне «Sad Robot Goes Funny» инструмент «гитара-бот» с двумя грифами выполняет чрезвычайно быструю игру, в то же время динамически меняя аккорды так, как это было бы невозможно для человека-музыканта. Это в полной мере использует 78 «пальцев» на основе соленоидов и медиаторы этого инструмента, которые могут артикулировать каждую струну в отдельности. Точно так же, хотя Шимон и Хайле предназначены для выступления с людьми-музыкантами, оба исследовали внечеловеческие музыкальные возможности своих проектов с упором на «игру [инг] как машина» (Weinberg et al., 2020, 95).
Это в полной мере использует 78 «пальцев» на основе соленоидов и медиаторы этого инструмента, которые могут артикулировать каждую струну в отдельности. Точно так же, хотя Шимон и Хайле предназначены для выступления с людьми-музыкантами, оба исследовали внечеловеческие музыкальные возможности своих проектов с упором на «игру [инг] как машина» (Weinberg et al., 2020, 95).
Неантропоморфные роботизированные инструменты
Неантропоморфные роботизированные инструменты могут быть либо мехатронными дополнениями к существующим акустическим инструментам (например, Yamaha Disklavier), 9 , либо новыми инструментами, не имеющими акустических аналогов (например, Gravity Harp от Andy Cavatorta Studio). 10 Таблица 1 включает ряд недавно активных групп и отдельных лиц, производящих коллекции неантропоморфных роботизированных инструментов, а также хорошо задокументированных отдельных роботов.
ТАБЛИЦА 1 . Выбор недавно активных групп и отдельных лиц, производящих коллекции неантропоморфных роботизированных инструментов, а также недавно разработанных, хорошо задокументированных отдельных роботов.
Неантропоморфные роботизированные инструменты, как правило, больше фокусируются на звуковых нюансах, чем на моделировании действий человека. Например, роботизированный вибрафон
Одним из недостатков конструкции  Хотя это распространенная проблема в этой категории, некоторые проекты предназначены для максимальной видимости движения. Например, GuitarBot от LEMUR имеет четыре вертикально установленных струны, где высота звука изменяется на каждой струне с помощью лада с ременным приводом, который перемещается более чем на полметра (Singer et al., 2003). Другие подходы включают использование светодиодов для визуализации воспроизведения звука (например, Rogers et al., 2015).
Хотя это распространенная проблема в этой категории, некоторые проекты предназначены для максимальной видимости движения. Например, GuitarBot от LEMUR имеет четыре вертикально установленных струны, где высота звука изменяется на каждой струне с помощью лада с ременным приводом, который перемещается более чем на полметра (Singer et al., 2003). Другие подходы включают использование светодиодов для визуализации воспроизведения звука (например, Rogers et al., 2015).
Совместные музыкальные роботы
Новая область музыкальной робототехники сочетает в себе человеческую деятельность и работу роботов в едином общем интерфейсе. Бартон описывает эти устройства как кооперативные музыкальные машины, проводя различие между кооперативными (электро)механическими инструментами, которые не реагируют на действия человека, и кооперативными роботизированными инструментами, которые реагируют и взаимодействуют с людьми-исполнителями (Barton, et al., 2017). Примеры кооперативных (электро)механических инструментов включают 9 Мейва Денки. 0037 Ultra Folk акустическая гитара 12 и Гуревича STRINGTREES (Гуревич, 2014). Примеры совместных роботизированных инструментов включают Barton Cyther , управляемую человеком самонастраивающуюся роботизированную цитру, а также ранее обсуждавшуюся Halie (Weinberg et al., 2020, 26).
0037 Ultra Folk акустическая гитара 12 и Гуревича STRINGTREES (Гуревич, 2014). Примеры совместных роботизированных инструментов включают Barton Cyther , управляемую человеком самонастраивающуюся роботизированную цитру, а также ранее обсуждавшуюся Halie (Weinberg et al., 2020, 26).
Роботизированный барабанный протез от Технологического института Джорджии, выходящий за рамки общего интерфейса, расширяет возможности тела. Это устройство состоит из протеза руки, оснащенного бесщеточными карданными двигателями, и одноступенчатого ременного привода, соединенного с барабанной палочкой (Weinberg et al., 2020, 219).). Барабанщик с ампутированной конечностью управляет палочкой с помощью датчиков ЭМГ, подключенных к мышцам культи. Вместо того, чтобы просто заменить человеческую руку, возможности мехатронного дизайна и роботизированного управления, включая добавление второго джойстика, обеспечивают невозможные для человека виртуозность и скорость (Weinberg et al. , 213, 226). Помимо музыкальных возможностей, роботизированное увеличение тела конкретизирует представления о постгуманизме и киборге (Haraway 1991). Это также заставляет наблюдателей сомневаться в «человечности» аугментированного человека, а не вызывать чувство антропоморфизма (Swartz and Watermeyer 2008), хотя это может измениться по мере того, как эти технологии получат более широкое распространение.
, 213, 226). Помимо музыкальных возможностей, роботизированное увеличение тела конкретизирует представления о постгуманизме и киборге (Haraway 1991). Это также заставляет наблюдателей сомневаться в «человечности» аугментированного человека, а не вызывать чувство антропоморфизма (Swartz and Watermeyer 2008), хотя это может измениться по мере того, как эти технологии получат более широкое распространение.
Отдельные актуаторы, используемые для создания собственного звука
Последняя категория в этом обсуждении включает проекты, которые сосредоточены на звуках и движении отдельных актуаторов. Хотя некоторые могут не считать эти подходы музыкальными роботами из-за отсутствия сложности в конструкции или звуковом выходе, я утверждаю, что их важно учитывать в этом обсуждении, потому что 1) как и все другие подходы, описанные здесь, они обладают электромеханическими свойствами. приводы, которые производят видимое физическое действие, приводящее к воспроизведению звука, и 2) они преобразуют звук, производимый электромеханическими приводами, в его самую основную форму.
Несколько дизайнеров создали музыку, используя звуковую катушку и шаговые приводы от гибких дисков и жестких дисков, а также отдельные шаговые двигатели. Эти подходы имеют тенденцию воспроизводить известную музыку, такую как аранжировка Задрожняка «Имперский марш» из «Звездных войн» для дисководов гибких дисков. 13 Несмотря на то, что эти актуаторы воспроизводят уникальный тембр, их возможности для звуковых нюансов ограничены.
Другие дизайнеры создают произведения, производящие звук с помощью простых действий моторов. Например, Зимоун строит крупномасштабные звуковые скульптуры с отдельными моторами, приводящими в действие резонирующие объекты. 14 Одна установка состоит из 658 картонных коробок, по которым ударяют ватные шарики, соединенные с двигателем постоянного тока рояльной проволокой. Когда двигатель вращается, мяч ударяется о коробку и издает резонансный звук. При таком подходе гравитация, трение и резонанс, а также движение самого двигателя создают вариации звука, которые делают работу убедительной.
Обсуждение
В этой статье предлагается новая система классификации, которая позволяет нам рассмотреть, как различные подходы к музыкальной робототехнике по-разному выражают творчество. В целом, чем более откровенно антропоморфна форма, тем важнее внешний вид проекта для его творчества. Например, творческое воздействие робота Toyota Partner проистекает из того факта, что робот-гуманоид выполняет типично человеческую деятельность. По мере того, как антропоморфная форма уменьшается, оригинальность и эффективность передаются через способность к звуковым нюансам, а также через то, как эти машины либо точно моделируют человеческие действия, либо развивают свою собственную роботизированную практику. Для крайнего случая, такого как работа Зимоуна, в центре работы лежит связь с антропоморфным поведением в процессе звукоизвлечения. Понимая взаимосвязь и различные цели различных подходов к музыкальной робототехнике, мы можем лучше оценить способы, которыми эти машины выражают оригинальность и эффективность как для дизайнеров, так и для зрителей. Хотя разработанные здесь классификации носят теоретический характер, мы надеемся, что они окажутся полезными при разработке будущих исследований, посвященных тому, как музыкальные машины можно считать творческими.
Хотя разработанные здесь классификации носят теоретический характер, мы надеемся, что они окажутся полезными при разработке будущих исследований, посвященных тому, как музыкальные машины можно считать творческими.
Заявление о доступности данных
Первоначальные материалы, представленные в исследовании, включены в статью/дополнительный материал. Дальнейшие запросы можно направлять соответствующему автору.
Вклад авторов
Автор подтверждает, что является единственным автором этой работы и одобрил ее публикацию.
Конфликт интересов
Автор заявляет, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Сноски
1 В этой статье роботизированная музыкальность определяется как пересечение музыкальной мехатроники и машинной музыкальности. Хотя понятия креативности и антропоморфизма упоминаются вскользь, они не используются для классификации различных подходов к музыкальной робототехнике.
2 https://www.patmetheny.com/orchestrioninfo/
3 Робот-скрипка Toyota Partner: https://www.youtube.com/watch?v=-yInphJdick
4 Робот-труба Toyota Partner: https://www.youtube.com/watch?v=6fctULDctuA
5 Робот-скрипка Toyota Partner (см. № 3).
6 http://www.takanishi.mech.waseda.ac.jp/top/research/music/flute/wf_4rii/index.htm (Раздел IV)
7 https://www.yurisuzuki .com/design-studio/z-machines
8 https://news.tsinghua.edu.cn/en/info/1012/5231.htm
9 https://usa.yamaha.com /products/musical_instruments/pianos/disklavier/index.html
10 https://andycavatorta.com/gravityharps.html
11 https://logosfoundation.org/instrum_gwr/vibi.html
12 https://www.mayetchwadenki /tsukuba-2/
13 https://www.youtube.com/watch?v=yHJOz_y9rZE
14 https://www. zimoun.net/
zimoun.net/
Ссылки
Байлин С. ( 1983). О творчестве как создании: ответ Гетцу. J. Эстетика Искусствоведение 41 (4), 437–442. дои: 10.2307/429877
Полнотекстовая перекрестная ссылка | Google Scholar
Бартон С., Прихар Э. и Карвалью П. (2017). «Cyther: управляемая человеком самонастраивающаяся роботизированная цитра», в материалах международной конференции по новым интерфейсам для музыкального самовыражения, Копенгаген, Дания (NIME), 319–324.
Google Scholar
Бартон С., Сандберг К., Уолтер А., Бейкер Л.С., Сане Т. и О’Брайен А. (2018). «Роботизированный перкуссионный аэрофон», Материалы 18-й международной конференции по новым интерфейсам для музыкального самовыражения . 409–412.
Полнотекстовая перекрестная ссылка | Google Scholar
Боден, Массачусетс (1996). «Творчество», в Искусственный интеллект . Редактор М. А. Боден (Сан-Диего, Калифорния: Academic Press), 267–291.
Полнотекстовая перекрестная ссылка | Google Scholar
Боден, Массачусетс (2004). Творческий разум: мифы и механизмы . 2-е изд. Лондон, Соединенное Королевство: Рутледж.
Творческий разум: мифы и механизмы . 2-е изд. Лондон, Соединенное Королевство: Рутледж.
Полный текст CrossRef
Бретан, М., и Вайнберг, Г. (2016). Обзор роботизированной музыкальности. Комм. АСМ 59 (5), 100–109. doi:10.1145/2818994
CrossRef Полный текст | Google Scholar
Chadefaux, D., Le Carrou, J-L., Vitrani, MA, Billout, S., и Quartier, L. (2012). «Робот, играющий на арфе», международная конференция IEEE/RSJ по интеллектуальным роботам и системам, 2012 г. (Виламоура-Алгарве, Португалия), 4886–4891. doi:10.1109/IROS.2012.6385720
Google Scholar
Коуп, Д. (2005). Компьютерные модели музыкального творчества . Кембридж, Массачусетс: MIT Press.
Данненберг, Р. Б., Браун, Х. Б., и Лупиш, Р. (2011). «Макблэр: робот-волынщик», в Музыкальные роботы и интерактивные мультимодальные системы . Тракты Springer в передовой робототехнике . Редакторы Дж. Солис и К. Нг (Берлин: Springer).
Google Scholar
Дэвис А. и Кросби А. (2016). «Compressorhead: группа роботов и ее трансмедийный мир историй», в Культурная робототехника . Редакторы JTKV Koh, BJ Dunstan, D. Silvera-Tawil и M. Velonaki (Cham: Springer International Publishing).
и Кросби А. (2016). «Compressorhead: группа роботов и ее трансмедийный мир историй», в Культурная робототехника . Редакторы JTKV Koh, BJ Dunstan, D. Silvera-Tawil и M. Velonaki (Cham: Springer International Publishing).
Google Scholar
Дои М. и Накадзима Ю. (2019). «Роботы-партнеры Toyota», в Человекоподобная робототехника: ссылка . Редакторы А. Госвами и П. Вадаккепат (Дордрехт: Springer Nature).
Google Scholar
Финк, Дж. (2012). «Антропоморфизм и человеческое сходство в конструкции роботов и взаимодействии человека и робота», в Социальная робототехника . Редакторы С. Сэм Ге, О. Хатиб, Дж. Кабибихан, Р. Симмонс и М.А. Уильямс (Берлин, Гейдельберг: Springer), 19 лет.9–208.
Полнотекстовая перекрестная ссылка | Google Scholar
Флорес Р.И., Моран Р.М.Л. и Руано Д.С. (2019). Мексиканский футуризм. Переходный путь между традицией и инновациями. Стратег. Дес. Рез. J. 12 (2), 222–234. doi:10.4013/sdrj. 2019.122.08
2019.122.08
CrossRef Полный текст | Google Scholar
Галлахер, Д. (2017). Джей Вэнс может играть металл с самодельными роботами, но он говорит, что это не должно быть забавно. Доступно по адресу: https://www.dallasobserver.com/music/jay-vance-frontman-of-captured-by-robots-on-how-he-turned-his-novelty-robot-band-into-a-serious. -one-10081744 (по состоянию на 10 декабря 2020 г.).
Google Scholar
А. Госвами и П. Вадаккепат (2019). Гуманоидная робототехника: ссылка (Дордрехт, Нидерланды: Springer).
Гётц, И.Л. (1981). Об определении творчества. J. Эстетика Искусствоведение 39 (3), 297–301. doi:10.2307/430164
CrossRef Полный текст | Google Scholar
Гуревич М. (2014). «Распределенное управление в мехатронном музыкальном инструменте», в материалах международной конференции по новым интерфейсам для музыкального выражения, 487–49.0. Лондон, Великобритания: Зенодо.
Google Scholar
Харауэй, Д. (1991). «Манифест киборгов: наука, технологии и социалистический феминизм в конце двадцатого века» в обезьянах, киборгах и женщинах: новое изобретение природы . Нью-Йорк, штат Нью-Йорк: Рутледж.
«Манифест киборгов: наука, технологии и социалистический феминизм в конце двадцатого века» в обезьянах, киборгах и женщинах: новое изобретение природы . Нью-Йорк, штат Нью-Йорк: Рутледж.
Ипполито, Дж. (2009). Товары искусства из Японии: пропаганда искусства и культуры через Интернет. Междунар. J. Arts Soc. 4 (4), 109–116. doi:10.18848/1833-1866/cgp/v04i04/35682
Полный текст CrossRef | Академия Google
Джонс, Р. (2017). Архаичный человек встречает чудесный автомат: постгуманизм, социальные роботы, архетипы. Дж. Анал. Психол. 62, 338–355. дои: 10.1111/1468-5922.12316 |
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
Капур, А. (2005). «История музыкальных инструментов-роботов», Материалы международной компьютерной музыкальной конференции 2005 г., ICMC 2005. 4–10 сентября 2005 г., Барселона, Испания. Доступно по адресу: http://hdl.handle.net/2027/spo.bbp2372.2005.162.
Google Scholar
Капур А. , Дарлинг М., Дьякопулос Д., Мерфи Дж. В., Хохенбаум Дж., Валлис О. и др. (2011). Машинный оркестр: ансамбль исполнителей на ноутбуках и музыкальных инструментов-роботов. Комп. Music J. 35 (4), 49–63. doi:10.1162/comj_a_00090
, Дарлинг М., Дьякопулос Д., Мерфи Дж. В., Хохенбаум Дж., Валлис О. и др. (2011). Машинный оркестр: ансамбль исполнителей на ноутбуках и музыкальных инструментов-роботов. Комп. Music J. 35 (4), 49–63. doi:10.1162/comj_a_00090
Полный текст CrossRef | Google Scholar
Кемпер С. и Бартон С. (2018). «Мехатронное выражение: переосмысление выразительности музыки для роботизированных инструментов», Материалы 18-й международной конференции по новым интерфейсам для музыкального выражения. Блэксбург, Вирджиния, США: Зенодо, 84–87. дои: 10.5281/zenodo.1302689
Google Scholar
Кемпер, С. (2014). Сочинение для музыкальных роботов: эстетика электромеханической музыки. Emille: J. Korean Electro-Acoustic Music Soc. 12, 25–31.
Google Scholar
Кемпер С. и Сайпес Р. (2019). Могут ли музыкальные машины быть выразительными? Взгляды с просветления и сегодня. Леонардо 52 (5), 448–454. doi:10.1162/LEON_a_01477
Полный текст CrossRef | Google Scholar
Лейтман, С. (2011). Тримпин: интервью. Комп. Music J. 35 (4), 12–27. doi:10.1162/COMJ_a_00088
(2011). Тримпин: интервью. Комп. Music J. 35 (4), 12–27. doi:10.1162/COMJ_a_00088
Полный текст перекрестной ссылки | Google Scholar
Лонг Дж., Мерфи Дж., Карнеги Д. и Капур А. (2017). Громкоговорители Дополнительно: история электроакустической музыки без громкоговорителей. Организованный звук 22 (2), 195–205. doi:10.1017/S1355771817000103
CrossRef Полный текст | Google Scholar
Мэйс, Л., Раес, Г.-В., и Роджерс, Т. (2011). Оркестр человека и робота-машины в Логосе. Комп. Музыка Дж. 35 (4), 28–48. doi:10.1162/comj_a_00089
Полный текст CrossRef | Google Scholar
Макгроу, А. (2016). Атмосфера как понятие для этномузыкологии: сравнение гамелатрона и гамелана. Этномузыкология 60 (1), 125–147. doi:10.5406/ethnomusicology.60.1.0125
CrossRef Полный текст | Google Scholar
Monsão, I.C., Cerqueira, JDJF, and da Costa, ACPL (2017). Беримбот: роботизированный музыкальный инструмент как инструмент популяризации науки и техники. Междунар. Дж. Соц. Робототехника 9, 251–263. doi:10.1007/s12369-016-0386-3
Междунар. Дж. Соц. Робототехника 9, 251–263. doi:10.1007/s12369-016-0386-3
CrossRef Full Text | Google Scholar
Мерфи, Дж. (2014). Выразительные музыкальные роботы: создание, оценка и взаимодействие с ансамблем мехатронных инструментов. Кандидатская диссертация. Веллингтон, Новая Зеландия: Веллингтонский университет Виктории.
Google Scholar
Мерфи Дж., Капур А. и Карнеги Д. (2012). Музыкальная робототехника в мире громкоговорителей: развитие альтернативных подходов к локализации и пространственной организации. Леонардо Мьюзик Дж. 22, 41–48. doi:10.1162/lmj_a_00090
Полный текст перекрестной ссылки | Google Scholar
Парк Х., Ли Б. и Ким Д. (2016). Разработка антропоморфного пальца робота для игры на скрипке. ETRI J. 38, 1218–1228. doi:10.4218/etrij.16.0116.0129
CrossRef Full Text | Google Scholar
Roads, C. (1986). Музыкальный робот Цукуба. Комп. Music J. 10 (2), 39–43. doi:10. 2307/3679483
2307/3679483
CrossRef Полный текст | Академия Google
Роджерс Т., Кемпер С. и Бартон С. (2015). «МАРИ: ансамбль роботов-инструментов с монохордом и аэрофоном», Материалы международной конференции по новым интерфейсам для музыкального самовыражения. Батон-Руж, Луизиана, США: Зенодо, 408–411. doi:10.5281/zenodo.1179166
Google Scholar
Runco, MA, and Jaeger, GJ (2012). Стандартное определение творчества. Творчество Рез. J. 24 (1), 92–96. doi:10.1080/10400419.2012.650092
CrossRef Full Text | Академия Google
Сибуя К., Мацуда С. и Такахара А. (2007). «На пути к разработке робота-скрипача — смычок с помощью антропоморфной руки робота и анализ звука», в RO-MAN 2007 — 16-м международном симпозиуме IEEE по интерактивному общению роботов и людей. Чеджу, Корея (Юг), 763–768. doi:10.1109/ROMAN.2007.4415188
CrossRef Full Text | Google Scholar
Сингер Э., Феддерсен Дж., Редмон К. и Боуэн Б. (2004). «Музыкальные роботы LEMUR», в материалах международной конференции по новым интерфейсам для музыкального самовыражения. Хамамацу, Япония: Зенодо. дои: 10.5281/zenodo.1176669
Хамамацу, Япония: Зенодо. дои: 10.5281/zenodo.1176669
Google Scholar
Сингер Э., Ларке К. и Бьянчарди Д. (2003). «LEMUR GuitarBot: струнный робот-инструмент MIDI», в материалах международной конференции по новым интерфейсам для музыкального самовыражения, 188–191.
Google Scholar
Snake-Beings, E. (2017). Эстетика самодельного (DiY) ремесла группы trons — гаража роботов. Ремесло Res. 8 (1), 55–77. doi:10.1386/crre.8.1.55_1
Полный текст CrossRef | Академия Google
Солис, Дж., Чида, К., Танигути, К., Хасимото, С.М., Суэфудзи, К., и Таканиши, А. (2006). Робот-флейтист Waseda WF-4RII в сравнении с профессиональным флейтистом. Комп. Music J. 30 (4), 12–27. doi:10.1162/comj.2006.30.4.12
Полный текст CrossRef | Google Scholar
Солис, Дж., и Хашимото, А.К. (2010). «Разработка антропоморфного робота, играющего на саксофоне», в Мозг, тело и машины, материалы международного симпозиума по случаю 25-летия Университетского центра интеллектуальных машин Макгилла . Редакторы Б. Буле, Дж. Дж. Кларк, Дж. Ковечес и К. Сиддики (Берлин: Springer), 175–186. doi:10.1007/978-3-642-16259-6
Редакторы Б. Буле, Дж. Дж. Кларк, Дж. Ковечес и К. Сиддики (Берлин: Springer), 175–186. doi:10.1007/978-3-642-16259-6
CrossRef Full Text | Google Scholar
Дж. Солис и К. Нг (2011). Музыкальные роботы и интерактивные мультимодальные системы (Берлин: Springer).
Squarepusher x Z-Machines (2014). Музыка для роботов. Деформация Rec.
Google Scholar
Шварц Л. и Уотермейер Б. (2008). Киборгская тревога: Оскар Писториус и границы того, что значит быть человеком. Инвалид. соц. 23 (2), 187–190. doi:10.1080/09687590701841232
CrossRef Full Text | Google Scholar
Шоллози, М. (2017). Фрейд, Франкенштейн и наш страх перед роботами: проекция в нашем культурном восприятии технологий. AI соц. 32, 433–439. doi:10.1007/s00146-016-0654-7
CrossRef Full Text | Google Scholar
Ван Ройен Р., Шлосс А. и Цанетакис Г. (2017). Актуаторы звуковой катушки для ударной робототехники. дои: 10.5281/zenodo. 1176149
1176149
Полнотекстовая перекрестная ссылка | Google Scholar
Вайнберг Г. и Дрисколл С. (2006). На пути к роботизированной музыке. Комп. Music J. 30 (4), 28–45. doi:10.1162/comj.2006.30.4.28
Полный текст CrossRef | Google Scholar
Вайнберг Г., Бретан М., Хоффман Г. и Дрисколл С. (2020). Роботизированная музыкальность: воплощение искусственного творчества и мехатронного музыкального выражения . Швейцария: Springer Nature.
Ся Г. и Данненберг Р. Б. (2015). «Дуэтное взаимодействие: обучение музыке для автоматического аккомпанемента», Материалы международной конференции по новым интерфейсам для музыкального самовыражения. Батон-Руж, Луизиана, США: Зенодо, 259 лет.–264. doi:10.5281/zenodo.1179198
Google Scholar
Музыкальный робот учится петь, его альбом размещен на Spotify
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После рождения без левого предплечья я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов. Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный медиа-любимец руки, bebionic от Ottobock, который я получил в 2018 году, имеет силовую рукоятку в форме кулака, щипковые рукоятки и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
еще громоздко и занимает много времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей. А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с
Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
«На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки делают людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
«Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом. И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей. Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом в конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал одновременно грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым можно управлять другой рукой. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта. По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. По его словам, даже помимо протезирования исследования манипуляций в исследованиях приматов и робототехники в подавляющем большинстве связаны с хватанием: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности. Fillauer TRS
Цепляясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г.
Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука — это инструмент инструментов», — писал Аристотель в De Anima . Он полагал, что человечество было намеренно наделено подвижной и цепкой рукой, потому что только наш уникальный разумный мозг мог использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты. Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов.
Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями.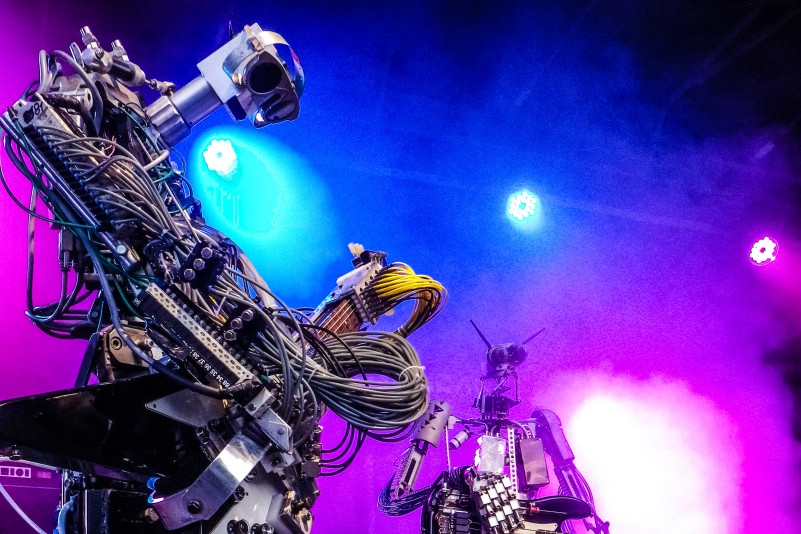 Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».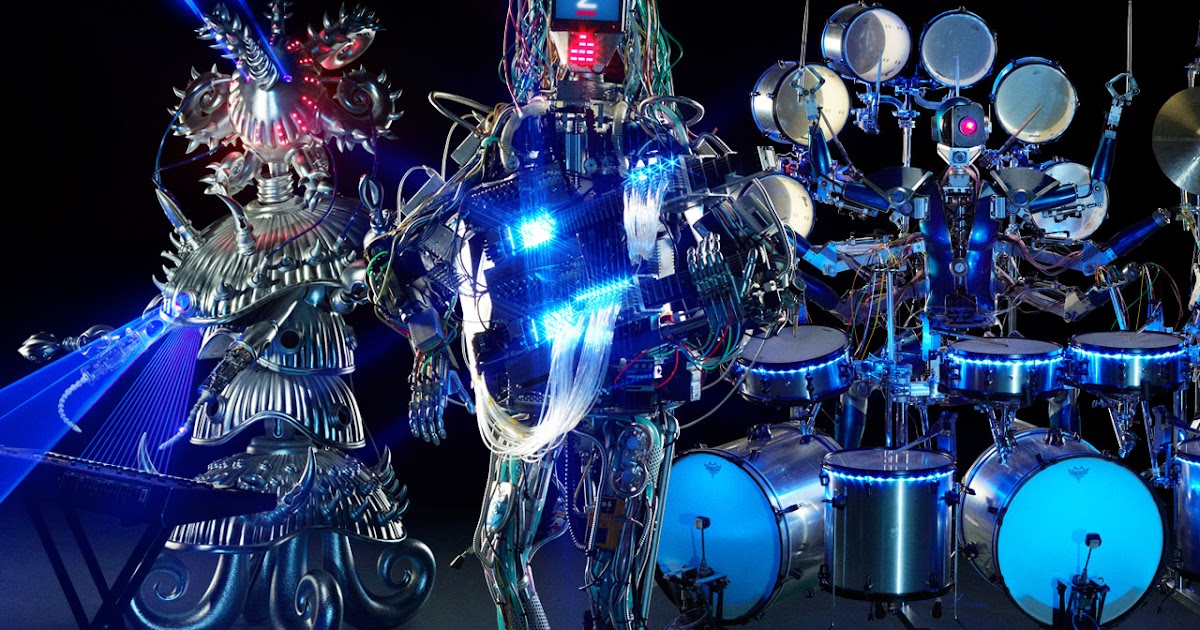
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании. Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей
протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы. Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.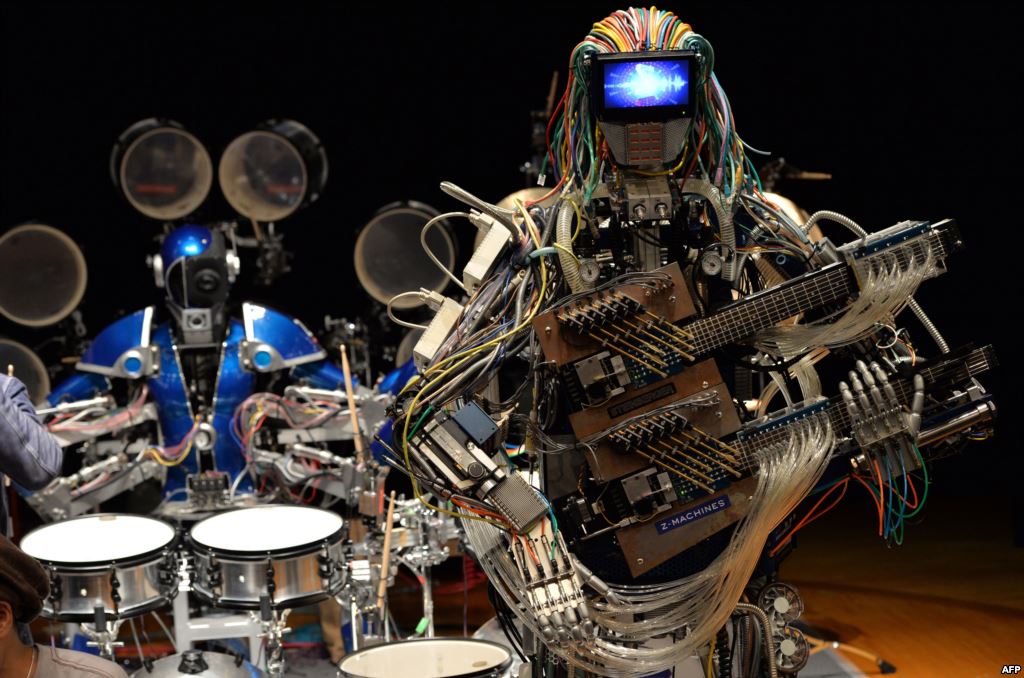
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — которые десятилетиями играют одни и те же роли, почти невозможно создать что-то действительно революционное.
Между тем, эта метафорическая гонка на Луну — это миссия, которая забыла о своей первоначальной цели: помочь людям с ограниченными возможностями приобретать и использовать инструменты, которые они хотят. Есть недорогие, доступные, низкотехнологичные протезы, которые доступны прямо сейчас и требуют инвестиций в инновации для дальнейшего снижения затрат и улучшения функциональности. И, по крайней мере, в Соединенных Штатах существует сломанная система страхования, которую необходимо починить. Освобождение себя от гонки бионических ручных вооружений может открыть возможности более функциональных конструкций, которые будут более полезными и доступными, и могут помочь нам вернуть наши устремления в области протезирования на землю.
Эта статья опубликована в печатном выпуске за октябрь 2022 г.
The Artful Android: Избранная история музыкальных роботов
Kara McLeland/wonderfulengineering.com91Classical
Хотя в Нэшвилле нет недостатка в бутик-номерах, новый отель, открывшийся в Мидтауне в этом месяце, надеется предложить гостям по крайней мере один уникальный опыт. : караоке с аниматронной группой. Сегодня гости могут исполнить классику, такую как Guns N’ Roses’ Sweet Child O’ Mine 9.0038 с трио музыкантов-роботов в стиле Чака Э. Чиз, но смешивание музыки и механики — это практика, восходящая как минимум к Средневековью. Вот несколько примечательных примеров андроидов, которые были запрограммированы на исполнение:
: караоке с аниматронной группой. Сегодня гости могут исполнить классику, такую как Guns N’ Roses’ Sweet Child O’ Mine 9.0038 с трио музыкантов-роботов в стиле Чака Э. Чиз, но смешивание музыки и механики — это практика, восходящая как минимум к Средневековью. Вот несколько примечательных примеров андроидов, которые были запрограммированы на исполнение:
Исмаил Аль-Джазари и его плавучий квартет
Иллюстрация группы роботов Аль-Джазари. как «отец робототехники», эрудит Исмаил аль-Джазари родился на территории современной Турции в 1136 году. Его работа в качестве ученого, изобретателя, инженера-механика, математика и ремесленника привела к публикации им Книга Знаний Гениальных Механических Устройств , которая содержала инструкции и иллюстрации 100 его собственных изобретений. Одним из самых сложных творений Аль-Джазари была группа из четырех музыкальных роботов с гидроприводом, предназначенных для плавания по озеру и развлечения гостей во время королевских праздников. Поскольку Аль-Джазари снабдил своего робота-барабанщика подвижными колышками, которые задавали его ритм, оркестр также может быть одним из первых примеров программируемых автоматов.
Поскольку Аль-Джазари снабдил своего робота-барабанщика подвижными колышками, которые задавали его ритм, оркестр также может быть одним из первых примеров программируемых автоматов.
Жак де Вокансон, «Флейтист»
Трио автоматов Вокансона: «Флейтист», «Переваривающая утка» и «Игрок на бубне»Wikimedia Commons
В 1737 году французский инженер и изобретатель Жак де Вокансон завершил то, что многие считают первый в мире настоящий робот. Фигура в натуральную величину имела рост более 5 футов 8 дюймов, была вырезана из дерева, кожи и картона и исполняла репертуар из 12 песен на настоящей поперечной флейте. Флейтист, как был назван автомат, мог двигать ртом, языком и пальцами, что побудило Вокансона представить отчет Французской академии наук, в котором утверждалось, что его творение может играть точно так же, как живой, дышащий музыкант. Хотя Академия была впечатлена, одним человеком, который не согласился с заявлением Вокансона, был давний учитель флейты Фридриха II Прусского Иоганн Иоахим Кванц.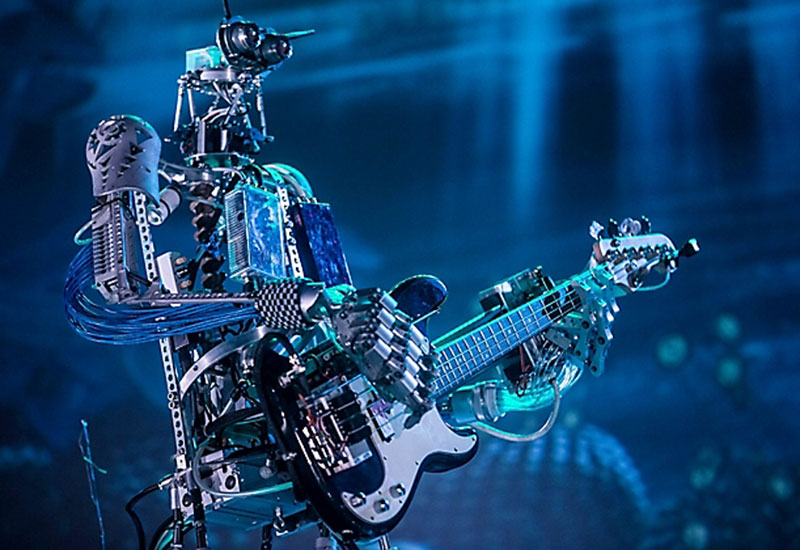 Кванц, возможно, немного расстроенный своим новым соревнованием роботов, указал, что Флейтист не мог правильно шевелить губами. Вместо этого он полагался на повышенное давление воздуха, достигающее верхних октав инструмента, что приводило к пронзительным тонам.
Кванц, возможно, немного расстроенный своим новым соревнованием роботов, указал, что Флейтист не мог правильно шевелить губами. Вместо этого он полагался на повышенное давление воздуха, достигающее верхних октав инструмента, что приводило к пронзительным тонам.
Пьер Жаке-Дро, Музыкант
Музыкант Жаке-Дро
Хотя Флейтист больше не с нами, органный автомат, построенный Пьером Жаке-Дро около 1770 года, все еще играет на музей в Швейцарии сегодня. Музыкант играет на своем органе, нажимая на клавиши ловкими деревянными пальцами, а головой и глазами, казалось бы, следует за руками. Замысловатое творение на самом деле было маркетинговым ходом — Жаке-Дро был часовщиком и хотел продать свою линию замысловатых механических часов для птиц, которые вы все еще можете купить сегодня. Ниже представлен короткометражный фильм о Жаке-Дро и его автоматах, где Музыкант появляется на отметке 6:30.
 youtube.com/embed/WofWNcMHcl0?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
youtube.com/embed/WofWNcMHcl0?feature=oembed» frameborder=»0″ allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»»>
Говорящая машина Вольфганга фон Кемпелена
Говорящая машина Вольфганга фон Кемпелена. Хотя технически это не робот в том смысле, что для управления набором мехов требуется человек, говорящая машина была попыткой Кемпелена воспроизвести человеческие голосовые связки и производить синтетические звуки, похожие на речь. Кемпелен потратил два десятилетия на настройку и усовершенствование своей конструкции, хотя его стремление создать машину, которая могла бы «петь» с переменной высотой звука, в конечном итоге не увенчалось успехом. Возможно, самый большой вклад Кемпелена в общество был сделан через несколько десятилетий после его смерти в 1804 году, когда молодой Александр Грэм Белл увидел на выставке точную копию говорящей машины Кемпелена и почувствовал вдохновение создать свою собственную версию.