Содержание
Сложить и расправить. Искусство оригами в робототехнике / Хабр
Не так давно на Хабре вышла новость о разработке червеобразных мягких роботов, которые легко меняют форму и длину для проникновения в труднодоступные места. Подобный робот – не только миниатюрное, но и высокотехнологичное устройство, оснащенное датчиками и серьезно адаптирующее свои функции к меняющимся условиям окружающей среды. Такое бионическое направление развития робототехники логично и ожидаемо, но, в то же время, оно перекликается с не менее интересным феноменом модульной робототехники. Модульный робот автоматически собирается из относительно простых единиц, которые могут сами добираться до точки стыковки, ориентируясь на разметку в помещении, например, на складе.
Интересующимся модульной робототехникой я рекомендую посмотреть диссертацию и научные работы Никиты Павлюка, познакомившего меня с этой темой. Здесь я затрону тему модульных роботов лишь в качестве контекста, подчеркнув их важнейшую черту – способность к реконфигурации. Шагом вперед от реконфигурации мне видится реализация приемов оригами в робототехнике, о чем я и расскажу далее.
Шагом вперед от реконфигурации мне видится реализация приемов оригами в робототехнике, о чем я и расскажу далее.
Реконфигурируемые модульные роботы и роботы-оригами
Модульная робототехника изучает целое семейство робототехнических систем, состоящих из мелких взаимосвязанных единиц-модулей, соединяемых через стыковочные интерфейсы. Эти роботы состоят из относительно простых и самодостаточных блоков, каждый из которых оснащен собственными датчиками, исполнительными механизмами и вычислительными средствами. Но наиболее существенны в их конструкции именно интерфейсы, через которые группы этих блоков могут сочленяться в более крупные или многофункциональные структуры. Роботов, обладающих такой возможностью, называют «самореконфигурируемыми», где самореконфигурироемость – это обратимый процесс, при котором дискретные единицы группируются друг с другом, и это делается без внешнего управления. Модульные роботы значительно выигрывают у жестких в функциональном и экономическом отношении. Поскольку такой робот может изменять форму, перераспределяя собственные детали, он адекватно приспосабливается к изменениям окружающей среды. Например, к исходной конфигурации модульного робота можно добавлять специализированные единицы, нужные для выполнения поставленной задачи: например, захваты, аккумуляторы или видеокамеры.
Поскольку такой робот может изменять форму, перераспределяя собственные детали, он адекватно приспосабливается к изменениям окружающей среды. Например, к исходной конфигурации модульного робота можно добавлять специализированные единицы, нужные для выполнения поставленной задачи: например, захваты, аккумуляторы или видеокамеры.
В структурном отношении простой модульный робот наиболее похож на змейку Рубика, состоящую из большого количества блоков:
Процесс сбора элементов модульным роботом можно сравнить с электронной игрой в «змейку». Змейка достраивается поблочно и с ростом количества блоков все более разнообразны варианты ее реконфигурации на плоскости. Этот же пример со змейкой выдает важную уязвимость модульных роботов: чем больше однотипных элементов в такой конструкции, тем сложнее ее конфигурировать и тем сложнее роботу действовать в тесной или загроможденной среде. Если робот должен действовать в среде, малодоступной или непригодной для человека, то и управлять роботом придется удаленно, и исправить ошибки (ре)конфигурации будет затруднительно. Поэтому реконфигурируемым модульным роботам не хватает пластичности, характерной для мягких роботов, упомянутых в начале этой статьи. В свою очередь, мягкие роботы не отличаются прочностью и не умеют реконфигурироваться.
Поэтому реконфигурируемым модульным роботам не хватает пластичности, характерной для мягких роботов, упомянутых в начале этой статьи. В свою очередь, мягкие роботы не отличаются прочностью и не умеют реконфигурироваться.
Именно поэтому в робототехнике оказался перспективен подход оригами. Роботы, устроенные по принципу оригами, могут быть модульными, но при этом настолько гибкими, что не уступают мягким роботам при работе в сложной окружающей среде.
Это автономные машины, чьи морфологические и функциональные свойства достигаются путем образования складок. Корпус оригами-робота состоит из множества динамических складок, благодаря совместной работе которых машина приводится в движение. Оригами-роботам присуща особая пластичность, поскольку они одновременно обладают свойствами жестких и мягких роботов. Такой подход к сборке роботов можно считать нисходящим, тогда как для робототехники в целом характерен восходящий принцип: мельчайшие узлы и сочленения постепенно собирают в более крупную структуру (что требует не только участия человека, но и времени, усилий и опыта). Подход оригами одновременно упрощает проектирование и сборку роботов. При традиционном подходе для сборки робота требуется сложная система креплений и монтажных средств, специфичных для каждой собираемой модели, тогда как оригами – это выкладка нужных деталей на плоскости с последующим складыванием их в нужную форму. В таком случае удается быстро создавать, тестировать и дорабатывать весьма сложные формы. Также при использовании метода оригами возможна быстрая реконфигурация сборочных линий.
Подход оригами одновременно упрощает проектирование и сборку роботов. При традиционном подходе для сборки робота требуется сложная система креплений и монтажных средств, специфичных для каждой собираемой модели, тогда как оригами – это выкладка нужных деталей на плоскости с последующим складыванием их в нужную форму. В таком случае удается быстро создавать, тестировать и дорабатывать весьма сложные формы. Также при использовании метода оригами возможна быстрая реконфигурация сборочных линий.
Робот Mori
Наиболее известным модульным роботом-оригами является Mori, собранный в Политехнической Школе Лозанны в 2016 году.
Робот Mori
«Mori» — это сокращение от «modular origami robot». Каждый треугольный элемент робота оснащен собственными элементами питания и датчиками:
Длина такого элемента – всего 70 мм, толщина – 6 мм, вес – 26 г. Mori поддается дистанционному управлению:
Здесь модуль управляется из соседнего помещения через прорезь в стенке и сам подхватывает объект, находящийся вне досягаемости пользователя. Затем первый модуль подбирается еще к трем модулям, подцепляет их по команде пользователя, после чего четыре модуля складываются в «контейнер», представляющий собой правильный тетраэдр. Поскольку все элементы Mori идентичны, они не только хорошо подгоняются друг к другу, но и могут образовывать прочную «решетку» правильной формы.
Затем первый модуль подбирается еще к трем модулям, подцепляет их по команде пользователя, после чего четыре модуля складываются в «контейнер», представляющий собой правильный тетраэдр. Поскольку все элементы Mori идентичны, они не только хорошо подгоняются друг к другу, но и могут образовывать прочную «решетку» правильной формы.
Разработка роботов-оригами тесно сопряжена с созданием умных материалов для них. Во-первых, такой материал должен реагировать на показания датчиков, встроенных в модуль; например, сигналом к началу сборки может стать повышение температуры материала или показания датчика приближения (proximity sensor). Для роботов-оригами особенно нужны пьезоэлектрические материалы и материалы с функцией запоминания формы (shape memory).
Рассмотрим их подробнее.
Роботы-оригами для реального использования
Пьезоэлектрические материалы изменяют форму в ответ на прилагаемый к ним электрический ток. Характерный пример – керамический перовскит, обеспечивающий движение оригами-микроботов. Несмотря на малый радиус действия, пьезоэлектрические исполнительные механизмы хорошо управляют складчатыми передачами, благодаря чему робота-оригами можно сделать ходячим и даже летающим. В таких системах сравнительно немного степеней свободы, но в миллиметровом масштабе электромагнитные приводы такого рода неэффективны, поэтому предпочтение все чаще отдается пьезоэлектрическим.
Несмотря на малый радиус действия, пьезоэлектрические исполнительные механизмы хорошо управляют складчатыми передачами, благодаря чему робота-оригами можно сделать ходячим и даже летающим. В таких системах сравнительно немного степеней свободы, но в миллиметровом масштабе электромагнитные приводы такого рода неэффективны, поэтому предпочтение все чаще отдается пьезоэлектрическим.
Сплавы с эффектом памяти формы (SMA). Это умные материалы, чья форма меняется в ответ на изменение температуры. Целевая форма детали задается и «усваивается» при нагревании до высокой температуры. После охлаждения и последующего нагревания до температуры перехода, более низкой, чем «учебная», деталь принимает заданную форму. Именно так и реализуется изменение форм по принципу оригами. Принцип сохраняется и при интеграции таких сплавов в композитные материалы. Через листы и плоские элементы робота можно пропускать витые провода из SMA, при воздействии на которые робот меняет форму и двигается. Кроме сплавов эффектом памяти формы также обладают некоторые полимеры (полиолефин, полистирен), в целом обладающие более широким (по сравнению со сплавами) диапазоном настраиваемых параметров, например, рабочего напряжения и рабочих температур. «Учебная» температура аналогичных сплавов может достигать 300 °C, а у полимеров или материалов из углеволокна остается в пределах 200 °C. При этом полимерам также более удобно придавать заданный паттерн и дешево производить. Правда, пластичность некоторых из таких полимеров оставляет желать лучшего – для возврата детали в исходное состояние после работы может потребоваться дополнительное внешнее воздействие. Чтобы достигать в таких случаях двунаправленную, а не однонаправленную пластичность, предпринимаются попытки конструировать оригами-роботов на основе диэлектрических эластомеров и гидрогелей.
«Учебная» температура аналогичных сплавов может достигать 300 °C, а у полимеров или материалов из углеволокна остается в пределах 200 °C. При этом полимерам также более удобно придавать заданный паттерн и дешево производить. Правда, пластичность некоторых из таких полимеров оставляет желать лучшего – для возврата детали в исходное состояние после работы может потребоваться дополнительное внешнее воздействие. Чтобы достигать в таких случаях двунаправленную, а не однонаправленную пластичность, предпринимаются попытки конструировать оригами-роботов на основе диэлектрических эластомеров и гидрогелей.
Армирование благородными металлами
В целом описанные материалы хороши для прототипирования оригами-моделей. Если говорить об оригами-роботах для промышленного использования, очевидно, что гибкости и легкости недостаточно. Такие роботы должны включать металл, который будет обеспечивать не только механическую прочность, но и электрическую проводимость и, соответственно, упростит обмен данными между модулями.
Оказалось, что непросто подыскать материал, который был бы пригоден для техники оригами, но при этом легко инкорпорировал бы атомы металлов. Для этой цели отлично подошел оксид графена (GO). Как известно, листы графена обладают нанометровой толщиной, поэтому складываются, сгибаются и принимают волнообразную форму, не разрушаясь ни при изготовлении, ни в динамике. В такие листы удалось включить атомы платины, золота и серебра. Когда оригами-робот приобретает подобный металлический «скелет», его функциональные возможности значительно расширяются: робот приобретает тензочувствительность и способность к беспроводной телекоммуникации. Шаблон для металлизированного модуля такого рода изготавливается из целлюлозы, затем покрывается оксидом графена, далее в него добавляются нанокристаллы благородного металла, образец прокаливается в аргоновой атмосфере и, наконец, обжигается:
Наряду с прочностью требуется обеспечить гибкость такого элемента. Для этого целлюлозно-платиновый образец удобно постепенно пропитывать эластомером, например, полидиметилсилоксаном (ПДМС).
Такие платиново-эластомерные оригами можно категоризировать как реконфигурируемые метаматериалы, способные послужить многофункциональным каркасом при изготовлении мягких роботов. Изменения формы, достигнутые роботом, сохранялись при линейном напряжении. Кроме того, проводящие платиново-эластомерные оригами обладают тензочувствительностью, даже без интеграции датчиков. Сам скелет робота действует как тензочувствительный датчик и позволяет отслеживать движения робота в режиме реального времени. Плоский целлюлозно-платиновый элемент сохраняет проводящие свойства (на уровне микроволокон) при сгибе до 60°, а при сгибе до 90° трескается.
Применение
Образование и игра. Складывание оригами привычно воспринимается как игровая активность, поэтому роботы-оригами привлекательны для детей и подростков. Материалы, рассмотренные в начале этой статьи, в частности, целлюлоза, безопасны в обращении, они легкие и без труда упаковываются и доставляются клиенту. Поскольку роботы-оригами такие легкие, для движения им хватает слабого и несложного мотора, а управлять таким роботом удобно со смартфона.
Космонавтика. Как я упоминал выше, роботы-оригами особенно удобны для работы в условиях, непригодных для человека, например, в космосе и на Марсе или Луне. Оригами-робот может быть максимально компактно уложен в спускаемом модуле, а затем принять нужную форму уже по прибытии на место назначения. Кроме того, марсианский робот-оригами мог бы проникать в пустоты и пещеры, в которые не попадает привычный марсианский ровер типа Curiosity, либо компактно складываться при пыльной буре, либо свертывать и развертывать исполнительные механизмы в зависимости от решаемой задачи. Таков, например, спроектированный NASA робот PUFFER (Pop-Up Flat Folding Explorer Robot).
Медтехника. Роботы-оригами пришлись кстати в современной медицине, где все чаще требуются сложные миниатюрные устройства, пригодные для использования внутри человека. Например, предполагается, что робота можно будет заключать в растворимую капсулу, так, чтобы в ней он попадал в желудок и уже там развертывался.
Такие роботы могли бы удалять из организма инородные тела, залечивать раны, либо прицельно доставлять лекарство к тому или иному органу, а также способствовать развитию хирургии без разрезов. Более того, раскрывающийся робот может расширить просвет кровеносного сосуда и почистить его от тромбов.
Раскладные солнечные панели. Отчасти этот вариант связан с вышеупомянутой возможностью использования оригами в космонавтике, но здесь техника оригами применяется к обширному составному зеркалу. Солнечная батарея может частично складываться или развертываться, реагируя на длину светового дня, на то, не занесло ли ее песком или снегом, а также сама стряхивать с зеркала снег, либо складываться при сильном ветре или в других опасных ситуациях. Кроме того, техника оригами позволяла бы тщательно контролировать угол наклона солнечных панелей.
Теоретически техника оригами могла бы обеспечить автономные метаморфозы робота; пока такие метаморфозы, которые позволяли бы роботу ситуативно менять функциональные возможности, затруднительны: ведь каждый узел робота обычно имеет строго конкретное назначение. Однако, если исполнительные механизмы робота могут меняться по принципу оригами, то робот может менять способ движения (например, ехать или ползти), менять форму захвата, регулировать силу и жесткость схвата, плыть, скользить и даже взлетать.
Однако, если исполнительные механизмы робота могут меняться по принципу оригами, то робот может менять способ движения (например, ехать или ползти), менять форму захвата, регулировать силу и жесткость схвата, плыть, скользить и даже взлетать.
На этом я поставлю точку с запятой, дав слово моим читателям; посмотрим, насколько интересен был этот обзор, и стоит ли браться за рассказ на смежную тему, занимающую меня не менее, чем роботы-оригами: 3D-печать механизмов с заданными свойствами.
Робот-оригами собирает себя сам и уходит прочь
Долгое время самодостаточные машины были одной из ключевых идей в научной фантастике. Стругацкие описывали кибернетическое яйцо, способное автономно развиваться в нужные устройства, а меняющие облик трансформеры полюбились детям и тем, кто остался ребёнком в душе. На протяжении многих лет исследователи из Массачусетского технологического института и Гарвардского университета работали над тем, чтобы претворить эти фантазии в жизнь хотя бы частично. В последнем номере журнала Science они опубликовали схему робота, который самостоятельно складывается по типу оригами из плоских заготовок, обретает форму и начинает двигаться.
В последнем номере журнала Science они опубликовали схему робота, который самостоятельно складывается по типу оригами из плоских заготовок, обретает форму и начинает двигаться.
В конструкции робота использованы прежние наработки его соавторов в области запрограммированной трансформации композитных материалов под действием тепла. Ранее они уже демонстрировали на Международной конференции по робототехнике и автоматизации самосборку куба и объёмной фигурки гуманоидного робота. Принцип здесь остался тот же: регулируя температуру можно заставить пластик сгибаться на определённый угол по заранее нанесённым лазером бороздкам.
Самосборка робота-оригами (фото: wyss.harvard.edu).
По словам разработчиков, в идеале требуется создать технологию, которая обеспечит сгибание пластика на точно заданный угол в пределах от одного до ста восьмидесяти градусов. В текущем варианте удалось достичь изгибания максимум на сто пятьдесят градусов, чего уже достаточно для большинства практических применений.
Все фрагменты робота-оригами сделаны пятислойными. Основной слой находится в середине «сэндвича» и представляет собой медный лист, в котором лазером вырезали соединения электрической схемы. В нём же размещаются выводы радиоэлементов и контакты для источника питания.
Исходные размеры листа для корпуса робота-оригами чуть меньше формата A4 и составляют 21,5 см на 28 см. С двух сторон медный слой изолирован диэлектрическими вставками из плотной бумаги. Наружные слои изготовлены из композита на основе полистирола. На них нанесены линии сгиба разной глубины, которые и обеспечивают запрограммированную деформацию при нагревании.
Робот-оригами после самосборки (фото: Harvard’s Wyss Institute).
«Самое удивительно здесь – это способность робота точно сложиться в объёмную фигуру из плоских листов, согласно предварительно выполненным расчётам», – говорит профессор электротехники и компьютерных наук MIT Даниэла Рус (Daniela Rus).
Во время демонстрации часть манипуляций с прототипом выполнялась вручную. Процесс самосборки был инициирован подключением аккумулятора и проходил поэтапно под действием встроенного нагревательного элемента. Затем в готовый корпус был установил микроконтроллер и запущена управляющая программа, которая заставила робота ползти по столу.
Процесс самосборки был инициирован подключением аккумулятора и проходил поэтапно под действием встроенного нагревательного элемента. Затем в готовый корпус был установил микроконтроллер и запущена управляющая программа, которая заставила робота ползти по столу.
Соавтор исследования профессор Эрик Демейн (Erik Demaine) поясняет, что ручное вмешательство было сделано ради ускорения презентации. В условиях серийного производства роботов процесс их самосборки может быть автоматизирован более полно и запускаться одним движением.
Созданный робот передвигается на четырёх ногах со скоростью 5 см/с. Каждая его нога имеет только одну степень свободы, но этого достаточно для демонстрационных целей. «Раньше мы показали возможность простой самосборки, – поясняет Демейн. – Теперь же мы смогли усложнить объёмные фигуры и заставить их двигаться».
Стадии самосборки робота — вид сверху (фото: mit.edu).
Каждый из электродвигателей управляет своей парой ног, передавая на них крутящий момент через восемь механических связей. Конечно, это далеко не единственный возможный вариант. «Особенность заключается ещё и в том, что при необходимости все конечности робота может приводить в движение даже один мотор», – поясняет Даниэла Рус.
Авторы долго экспериментировали с количеством двигателей. Предлагались варианты с одним и с четырьмя моторами. Первый обеспечивал простоту конструкции, а второй – лёгкость управления.
В итоге было решено оставить два двигателя как компромиссный вариант. «Впервые удалось создать роботизированную структуру с заложенной способностью к сложной самосборке, – комментирует работу профессор Калифорнийского университета в Беркли Рональд Фиринг (Ronald Fearing). – Если бы в ней не было электроники, то при создании шаблонов пришлось бы ограничиться примитивными вариантами, в которых весь лист нагревается сразу, а все его части сгибаются одновременно. Встроенная электроника даёт гибкость и огромный потенциал».
Встроенная электроника даёт гибкость и огромный потенциал».
Развитие технологии запрограммированной самосборки может привести к появлению лёгких корпусов для роботов и приборов произвольной формы. Привлекает здесь и низкая себестоимость решения. Для производства используются дешёвые материалы и обычная двумерная печать, а заготовки любой сложности можно хранить и перевозить как пачку листов.
Роботы-оригами: дизайн, материалы и применение
Оригами — это древняя японская техника бумажного искусства, которая позволяет складывать большой двухмерный лист в компактный объем путем тщательного расположения складок. Интересно, что использование складок и заломов для развития сложных иерархических структур широко встречается в природе, в том числе при разработке …
Оригами — это древняя японская техника бумажного искусства, которая позволяет складывать большой двухмерный лист в компактный объем путем тщательного расположения складок. Интересно, что использование складок и складок для развития сложных иерархических структур широко распространено в природе, включая развитие зародыша, листьев растений и крыльев насекомых. В последние годы наблюдается значительный рост использования этой техники во всех масштабах длины для разработки устройств и приложений в фотонике, механических метаматериалах и медицине.
Интересно, что использование складок и складок для развития сложных иерархических структур широко распространено в природе, включая развитие зародыша, листьев растений и крыльев насекомых. В последние годы наблюдается значительный рост использования этой техники во всех масштабах длины для разработки устройств и приложений в фотонике, механических метаматериалах и медицине.
Роботы-оригами — это функциональные устройства, структура и динамика которых заимствованы из техники рисования на бумаге и могут использоваться в авиационных, биомедицинских и экологических целях. В сочетании с передовыми методами производства роботы-оригами с настраиваемой податливостью могут обеспечить решение проблем, которые часто не могут быть решены с помощью обычных мягких или жестких роботов. Цель этой темы исследования — предоставить общую платформу для представления текущих разработок в области роботов-оригами от физиков, инженеров, клиницистов и ученых-экологов.
Мы стремимся охватить современные тенденции в дизайне, производстве, описании и применении роботов-оригами. Разработка этих роботов требует высоко междисциплинарного подхода и охватывает широкий спектр концепций от принципов математического проектирования, механики, управления и инновационных материалов до конкретных приложений. Области, которые будут затронуты в этой теме исследования, могут включать, но не ограничиваться:
Разработка этих роботов требует высоко междисциплинарного подхода и охватывает широкий спектр концепций от принципов математического проектирования, механики, управления и инновационных материалов до конкретных приложений. Области, которые будут затронуты в этой теме исследования, могут включать, но не ограничиваться:
• Принципы проектирования и алгоритмы роботов-оригами во всех масштабах длины
• Реконфигурируемые автономные роботы
• Управление роботами-оригами
• Новые материалы и принципы изготовления роботов-оригами
• Биомедицинские применения роботов-оригами, например. хирургия, доставка лекарств и сенсорика
• Эволюционные характеристики роботов-оригами
• Метаматериалы
Ключевые слова :
механика, правила проектирования, биомедицина, биоинспирация, автономный
Важное примечание :
Все вклады в эту тему исследования должны быть в рамках раздела и журнала, в который они представлены, как это определено в их заявлениях о миссии. Frontiers оставляет за собой право направить рукопись, выходящую за рамки рассмотрения, в более подходящий раздел или журнал на любом этапе рецензирования.
Frontiers оставляет за собой право направить рукопись, выходящую за рамки рассмотрения, в более подходящий раздел или журнал на любом этапе рецензирования.
Самоскладывающийся робот-оригами превращается из плоского в ходьбу за четыре минуты
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После рождения без левого предплечья я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов
Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Джоан Лаки для Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов. Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный медиа-любимец руки, bebionic от Ottobock, который я получил в 2018 году, имеет силовую рукоятку в форме кулака, щипковые рукоятки и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась
еще громоздко и занимает много времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей. А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если он имитировал наличие двух рук, явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если он имитировал наличие двух рук, явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с
Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки делают людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом. И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, похоже, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей.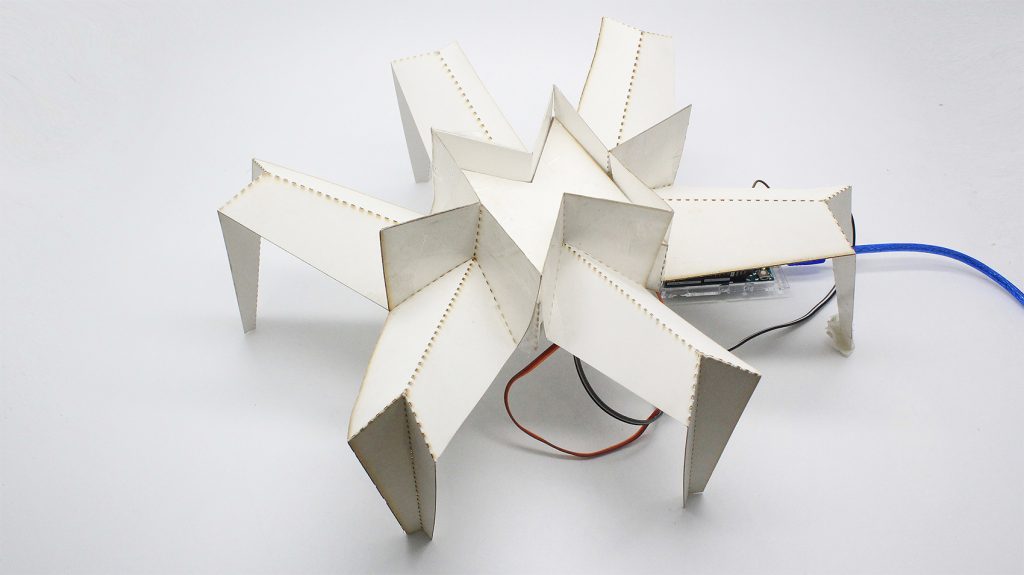 Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом на конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом на конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал одновременно грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым можно управлять другой рукой. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, протирая кухонный стол, казалось, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта. По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. По его словам, даже помимо протезирования исследования манипуляций в исследованиях приматов и робототехники в подавляющем большинстве связаны с хватанием: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности. Fillauer TRS
Fillauer TRS
Цепляясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г.
Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука — это инструмент инструментов», — писал Аристотель в De Anima . Он полагал, что человечество было намеренно наделено подвижной и цепкой рукой, потому что только наш уникальный разумный мозг мог использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.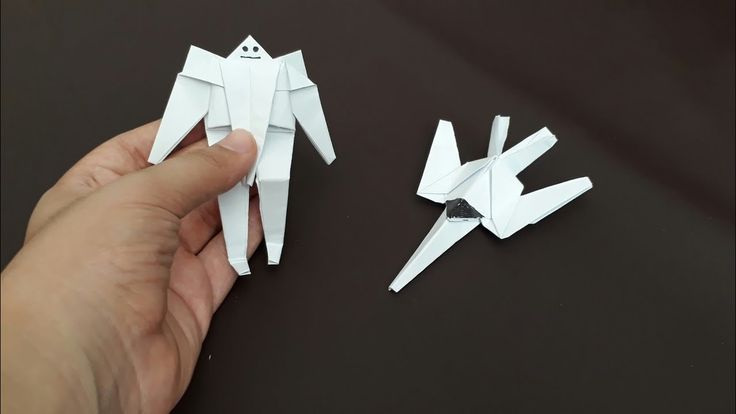
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты. Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если это имитировало две руки, было явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов.
Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями. Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании. Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей
протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы. Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для поднятия тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.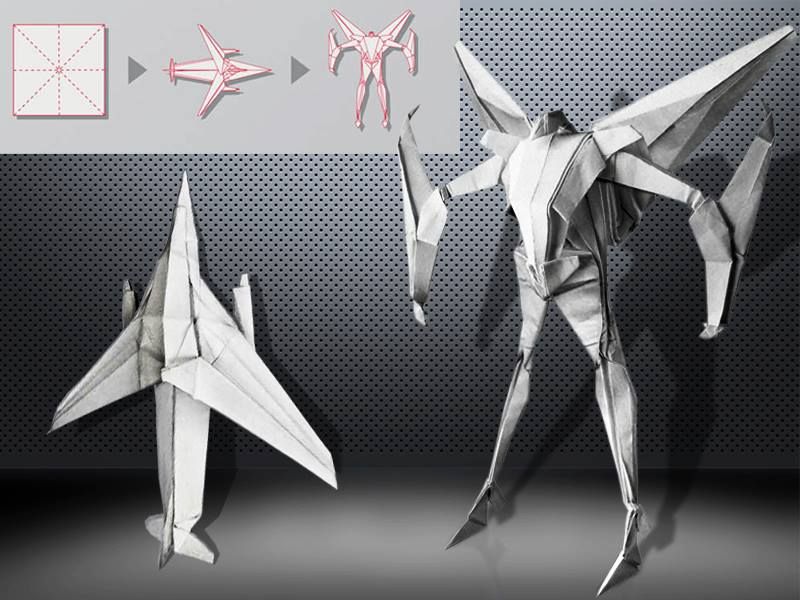
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — которые десятилетиями играют одни и те же роли, почти невозможно создать что-то действительно революционное.
Между тем, эта метафорическая гонка на Луну — это миссия, которая забыла о своей первоначальной цели: помочь людям с ограниченными возможностями приобретать и использовать инструменты, которые они хотят. Есть недорогие, доступные, низкотехнологичные протезы, которые доступны прямо сейчас и требуют инвестиций в инновации для дальнейшего снижения затрат и улучшения функциональности. И, по крайней мере, в Соединенных Штатах существует сломанная система страхования, которую необходимо починить.