Содержание
что еще умеют роботы из технопарка «Нагатино» / Новости города / Сайт Москвы
Экономика и предпринимательство
Инновационные изобретения на базе нейросетей облегчают работу человека, помогая автоматизировать многие технологические процессы.
Резидент московского технопарка «Нагатино» разработал роботов с искусственным интеллектом. Умные машины готовы решать разные задачи в строительстве, тяжелой промышленности, здравоохранении, образовании, сельском хозяйстве и других сферах.
Специальное программное обеспечение помогает им видеть, а также следовать за человеком и распознавать его жесты в качестве команд управления. Например, вытянутая вперед ладонь заставляет их остановиться, а поднятый вверх большой палец призывает начать движение.
Маневренные, бесшумные и эффективные
Доставлять пострадавших из труднодоступных мест готов робот «Спасатель». От аккумулятора он может работать без подзарядки до шести часов. «Спасатель» оснащен медицинскими носилками, приспособлениями для фиксации пациента и аптечкой для оказания первой помощи. Грузоподъемность такой машины составляет 600 килограммов. Двигаясь со скоростью до 10 километров в час, робот легко объезжает препятствия. А благодаря небольшим размерам он свободно помещается в салоне автомобиля скорой помощи.
«Спасатель» оснащен медицинскими носилками, приспособлениями для фиксации пациента и аптечкой для оказания первой помощи. Грузоподъемность такой машины составляет 600 килограммов. Двигаясь со скоростью до 10 километров в час, робот легко объезжает препятствия. А благодаря небольшим размерам он свободно помещается в салоне автомобиля скорой помощи.
«Спасатель» управляется при помощи специального мобильного приложения или пульта, а также кнопок, размещенных на корпусе. Такая машина способна заменить сразу несколько медицинских работников.
Миссия другого робота — «Патрульного» — инспектировать заданную территорию, передавать изображение на пункт контроля и оповещать о нарушениях. С помощью лазерного 3D-сканера платформа выстраивает карту, по которой автономно перемещается. Интеллектуальная система видеонаблюдения обеспечивает роботу круговой обзор. Дополнительно машина может комплектоваться различными датчиками — температуры, освещенности, задымленности, выбросов вредных газов.
«Патрульный» незаменим для оценки ситуации в случае угрозы радиации, утечек метана или возможного обрушения конструкций. Работая одновременно, несколько таких машин обеспечат круглосуточную безопасность охраняемого объекта.
Еще один робот «Специалист» — это универсальная платформа для научных изысканий, которая позволяет исследовать большие территории с пересеченной местностью. Гусеничная база обладает повышенной проходимостью. Вес машины не превышает 120 килограммов. Ее корпус защищен от влаги и выдерживает перепады температур от минус 25 до плюс 40 градусов.
В зависимости от установленного оборудования робот может выполнять забор почвенных проб, магниторазведку, аэромагнитную съемку, георадиолокацию и другие работы. Его также можно использовать как зарядную станцию для дронов.
Среди других разработок компании — «Агробот». Он умеет собирать урожай и перевозить сельскохозяйственные грузы.
Машина обучена движению за человеком. Например, «Агробот» может ехать за фермером, который собирает фрукты или овощи и складывает их в кузов робота. В нужное время достаточно нажать кнопку «Домой», и загруженная машина вернется в ангар.
В нужное время достаточно нажать кнопку «Домой», и загруженная машина вернется в ангар.
Успешные испытания
Весь цикл производства новинок, начиная от разработки программного обеспечения и заканчивая монтажными и сварочными работами, происходит в технопарке «Нагатино».
В 2021 году компания-разработчик оказалась в числе финалистов акселерационной программы, в рамках которой в одном из сортировочных центров установили роботы-манипуляторы. Задача машин — автоматизировать процесс укладки посылок на конвейерную ленту. Эти пилотные испытания завершатся в ближайшее время.
«Мы постоянно совершенствуем наших роботов. Продолжаем разработку более износостойкой подвески, всесезонного корпуса, улучшаем качество телеметрии, добавляем полезный функционал (кнопки управления на корпусе, управление жестами, следование за человеком). В настоящее время мы работаем над созданием роботизированного комплекса для сортировки лабораторных емкостей и автоматизации сварочной линии для завода по сборке автобусов и электробусов», — сообщил Александр Гаврилов, генеральный директор компании «Гумич».

По его словам, в настоящее время завершаются работы над прототипом робота «Патрульного». Совсем скоро его испытают на территории технопарка «Нагатино».
Теги
технопарки инновации разработки роботы искусственный интеллект Нагатино
Сферы
Экономика и предпринимательство,
Технологии,
Мой район
Департаменты
Департамент предпринимательства и инновационного развития города Москвы
Округ
Южный
Район
Нагорный
Все новости
проекты, за которыми стоит следить / Хабр
Модульными называются роботы, структура которых может изменяться с помощью добавления узлов, самостоятельных по отдельности. Они могут быть полезны в разных областях — от разработки игр до медицины и космонавтики.
Под катом собрали перспективные проекты модульных роботов. Как они работают, каких бывают форм и какие у них проблемы в реализации — рассказываем в подборке.
Как они работают, каких бывают форм и какие у них проблемы в реализации — рассказываем в подборке.
M-Blocks. Прямиком из MIT
Одним из первопроходцев в мире модульной робототехники стал молодой инженер Джон Романишин. В 2013 году он создал схему для самосборки роботов. Небольшие кубики без внешних подвижных частей могут передвигаться, прыгать друг на друга и соединяться. Технология получила название M-Blocks.
M-Blocks, без корпуса. Источник
Презентация проекта
Поначалу мало кто верил в разработку. В 2011 году Джон показал дизайн M-Blocks профессору робототехники Даниэле Рус. Она сказала, что это невозможно сделать, но через два года показала проект своему коллеге, исследователю в Корнельском университете. Он подтвердил нереализуемость разработки.
Позже Даниэла признала ошибку и поддержала Джона. Через два года он продемонстрировал свою разработку на Международной конференции IROS, тем самым доказав работоспособность M-Blocks.
Демонстрация проекта Джона Романишина. Теперь уже совместно с профессором Даниэлой Рус.
Как это работает
Магии здесь нет: кубы могут перемещаться без внешних подвижных элементов.
Внутри каждого установлен маховик, вращающийся со скоростью 20 000 оборотов в минуту. В момент резкой остановки «создается» инерция, побуждающая куб двигаться в определенном направлении.
Чтобы кубы стыковались между собой, на ребрах каждого из них есть цилиндрические магниты. Когда два куба сближаются, магниты поворачиваются друг к другу разноименными полюсами.
Когда кубы далеко друг от друга, они передвигаются почти хаотично: прыгают в разные стороны и делают сальто. Зато вблизи работают по принципу «скользящего куба». Так называется эффект, когда один куб двигается вдоль другого, вокруг общей оси — намагниченного ребра.
Фрагмент из видеоролика
Вторая версия и штрих-коды
В первой версии M-Blocks кубы передвигались почти хаотично, с помощью динамики и магнитного воздействия.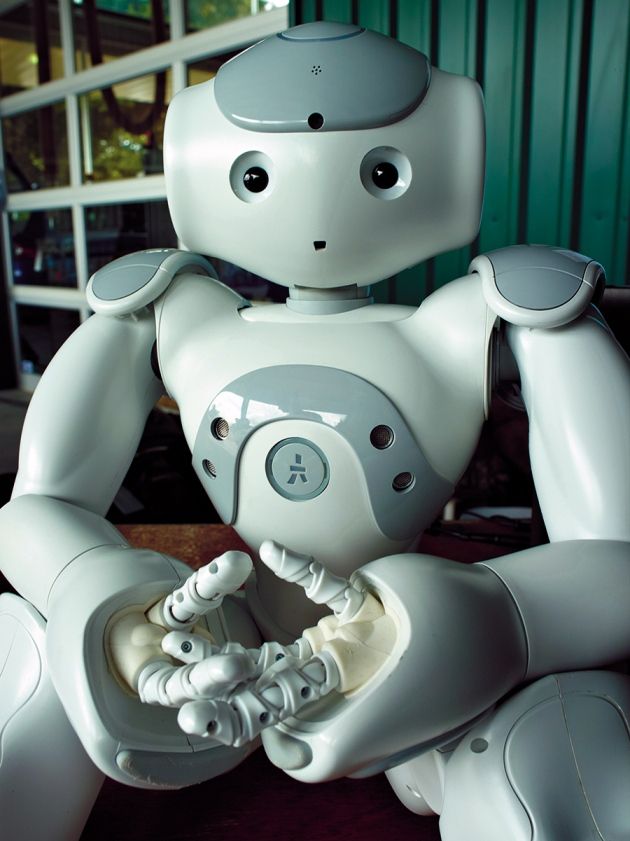 Им не хватало «осознанности».
Им не хватало «осознанности».
Через шесть лет вышла вторая версия проекта. Кубы-роботы «научились» общаться друг с другом, используя систему, напоминающую штрих-код. На каждой из граней есть свой код для идентификации. Также в каждом блоке установлены датчики для считывания направлений и световых сигналов. Так они могут распознавать друг друга и собираться в нужные структуры.
Демонстрация работы M-Blocks 2.0. Обратите внимание на световую сигнализацию.
Мечты и перспективы
Сегодня проект M-Blocks поддерживают Национальный научный фонд и Amazon Robotics. Есть надежда на дальнейшую миниатюризацию устройства. Одна из целей проектов, подобных M-Blocks, — создать систему микроботов, способную собираться в сложные структуры.
Напрашивается пример из «Мстителей», — боевой костюм из микроскопических роботов. Но до этого еще далеко. Пока реальным кажется использование модульных роботов M-Blocks, например, в интерактивных играх.
«Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.
Сферические роботы
FreeBOT
Еще один выходец Международной конференции IEEE/RSJ по интеллектуальным роботам (IROS) — проект ученых из университета Шэньчжэнь. В 2020 году они представили модульного робота FreeBOT.
FreeBOT. Источник
Как это работает
Визуально — полная противоположность M-Blocks. Модули состоят из железных сфер, внутри которых два колеса, моторчик, магнит, плата и батарейка. С помощью колес возникает вращение и движение сферы по поверхности. Похожее устройство у известного робота BB-8 производства Sphero.
Устройство сферы FreeBOT. Источник
Источник
Магнит направляет конструкцию и позволяет соединять сферы между собой. Благодаря ферромагнитному корпусу сферы сильнее прилипают друг к другу. Магнитомягкие свойства железного корпуса позволяют сферам легко разъединяться. Достаточно увести магнит в другую сторону.
Взаимодействия сфер FreeBOT. Источник
Что стало с проектом сегодня
Модульный робот FreeBOT получил продолжение в самостоятельном проекте FreeSN. Это тот же модульный робот, но с другой концепцией: теперь есть «управляющие» и «дочерние» узлы. «Управляющие» узлы, можно сказать, занимаются перестановками «дочерних». Не нужно размещать полноценный механизм внутри каждой из сфер.
Устройство «управляющего» модуля
Сегодня FreeSN может воплощать различные структуры — мосты, треноги и др.
Также робот умеет перемещать тяжелые объекты:
Пример перемещения объекта с помощью FreeSN
Модульный робот из улиток
Кроме FreeSN авторы разработали новый самостоятельный проект SnailBot. Ориентиром для него стали улитки.
Ориентиром для него стали улитки.
Источник
Идея сохранилась: модули объединяются в структуры с помощью магнитов. Но были добавлены шасси с шестью колесами в основании корпуса.
CAD-модель SnailBot. Источник
Благодаря внешней конструкции робот стал мобильней. Авторы утверждают, что такой механизм может повысить эффективность перестройки структуры и уменьшить количество сбоев при стыковке узлов.
Какой проект ученых из Гонконга станет «ключевым» — узнаем в следующих апдейтах. За успехами китайских роботостроителей можно следить на канале Robotics & AI Lab — CUHK Shenzhen.
Mori. Робот-оригами
Как говорилось ранее, модульные роботы могут создавать различные структуры. Главное их свойство — способность к реконфигурации, то есть к переустройству сборки.
Все предыдущие претенденты на звание «самого реконфигурируемого робота» были громозкими по сравнению с роботом-оригами Mori. Основа этого робота — треугольные модули. Проект был основан исследователями из Политехнической Школы Лозанны в 2016 году.
Основа этого робота — треугольные модули. Проект был основан исследователями из Политехнической Школы Лозанны в 2016 году.
С помощью треугольных модулей можно собирать структуры плотной компоновки — как и в случае M-Blocks, зазоры минимальны.
Структуры. Источник
Перспективы оригами
Благодаря структуре и толщине роботов-оригами можно создавать различные двумерные «решетки». Потенциально их можно применить в умной «броне». Свойства оригами позволяют повторять сложные геометрические формы.
Источник
Также можно найти им применение в космонавтике. Например, в реконфигурируемых спутниковых батареях. Тогда космический мусор не сможет обесточить космический аппарат.
Устройство и его минусы
Как и в FreeSN, робот-оригами состоит из «дочерних» и «управляющих» узлов. Последние занимаются перестановками, через них происходит управление.
Структура оригами-робота. Источник
Длина каждого из модулей составляет 70 мм, толщина — 6 мм, а вес — 26 г. Это оптимальные параметры для реконфигураций. Напомним, что в M-Blocks система «управляющие-дочерние» невозможна из-за массы узлов.
Mori, устройство модуля. Источник
Через плату происходит управление моторчиками и шарнирами. С помощью них робот может перемещаться по поверхности. Авторы не скрывают, что для перемещения нужна ровная поверхность. Это первый минус.
Второй минус — стыковка с другими узлами неосуществима без участия человека. Это показано в видеопрезентации проекта. Также каждый из модулей управляется по отдельности. Авторы еще не реализовали межмодульную сигнализацию, когда можно управлять всей структурой через один «несущий» модуль.
Видеопрезентация проекта Mori
Третий минус — отсутствие внутреннего источника питания. К каждому из «управляющих» модулей протянуты провода для питания самой платы. Напомним, что в M-Blocks, FreeBOT, FreeSN и SnailBot используют внутренние источники питания. Но как их заряжать без разрушения структуры? Вопрос остается открытым.
Напомним, что в M-Blocks, FreeBOT, FreeSN и SnailBot используют внутренние источники питания. Но как их заряжать без разрушения структуры? Вопрос остается открытым.
6 типов роботов, формирующих наш мир
Присущий человеческому духу творческий потенциал находит свое выражение как в изобретениях, так и в искусстве.
Это особенно заметно в области робототехники, где ученые придумали и создали искусственный интеллект и роботов совершенно разных форм, подходящих для целого ряда работ. Даже несмотря на относительную молодость отрасли, робототехники изобрели машины, далекие от классической концепции двуногого «металлического человека».
В то время как новые роботы придумываются все время, вы можете найти самые распространенные категории здесь:
Какие существуют типы роботов?
- Промышленные роботы
- Исследовательские роботы
- Потребительские роботы
- Медицинские роботы
- Аэрокосмические роботы
- Водные роботы
Роботы в первую очередь различаются по двум категориям: использование и перемещение.
Конечно, многие из этих категорий во многом совпадают; дроны, например, могут быть классифицированы как аэрокосмические, потребительские или исследовательские. Чтобы эта статья не превратилась в беспорядочный беспорядок, я дал общие определения для каждого отдельного типа и привел соответствующие примеры, основанные на моей оценке того, какова цель разработки для конкретного устройства.
Движение робота
Каждая из этих различных категорий роботов содержит машины всех форм и размеров. Одна вещь, которая верна для всей области робототехники, заключается в том, что внешний вид робота часто зависит от того, как он движется в окружающей среде.
Несмотря на это, многие роботы, которые выглядят и двигаются одинаково, могут иметь совершенно разные применения в реальном мире, что требует от нас рассмотрения наших механических компаньонов с разных точек зрения.
Промышленные роботы
Промышленные роботы часто представляют собой самую простую форму машины — стационарное или полустационарное устройство, выполняющее повторяющуюся задачу. Эти роботы, как правило, являются одними из наименее интеллектуальных из-за того, что работа, которую они выполняют, невероятно проста, а среда, в которой они работают, довольно свободна от внешних воздействий, которые могут нарушить их рутину.
СОВЕТ: Многие промышленные роботы перешли на управление программным обеспечением, а также на физическое конструирование продуктов, особенно в области автоматизации маркетинга. G2 имеет тысячи отзывов реальных пользователей, посвященных тому, чтобы помочь вам найти лучшее программное обеспечение для автоматизации маркетинга для ваших нужд: |
Исследовательские роботы
Эти кибернетические искатели приключений могут варьироваться по сложности от простых зондов до полностью автономных космических кораблей. Они используются для исследования самых дальних уголков космоса и самых темных впадин океанского дна, смело отправляясь туда, куда еще не ступала нога человека.
Они используются для исследования самых дальних уголков космоса и самых темных впадин океанского дна, смело отправляясь туда, куда еще не ступала нога человека.
Некоторые из наиболее известных примеров из них, такие как марсоход Opportunity, представляют собой тип робота, известного как «дистанционно управляемый аппарат» (или ROV), который выполняет некоторые автономные функции, имея при этом возможность управляться удаленным оператором или пилот. Эти роботы обычно оснащены расширенными функциями наблюдения или манипулирования. Эти функции позволяют им собирать данные из назначенных им сред более целенаправленно, чем их менее сложные аэрокосмические собратья.
Потребительские роботы
Роботы-потребители настолько распространены, что многие люди вообще не видят в них роботов! Это маленькие помощники по дому, которые ненавязчиво улучшают жизнь бесчисленных домовладельцев по всему миру. Классическим примером потребительского робота является roomba, автономная уборочная машина с датчиками, помогающими ей ориентироваться в любом пространстве, в которое вы ее поместите.
Печально известный DJ Roomba
Совсем недавно упрощенный ИИ начал сливаться с потребительскими роботами и Интернетом вещей, чтобы дать нам такие устройства, как Amazon Alexa или Google Home. Эти стационарные роботы оснащены так называемым «разговорным ИИ», который может считывать такие вещи, как тон и контекст, чтобы сделать обоснованное предположение о намерениях говорящего. Хотя эти устройства все еще далеки от совершенства, интересно представить, какое качество жизни они смогут обеспечить нам в следующие полвека.
Медицинские роботы
Помимо производства, разведки и выполнения черных работ, роботы также могут буквально спасать жизни.
Медицинские роботы могут варьироваться от автономных манипуляторов, которые помогают хирургам выполнять деликатные операции, до новой области управляемых разумом роботизированных протезов и экзоскелетов. Хотя мы, вероятно, не увидим полностью автономных хирургов еще много лет, управляемые врачами роботы раздвинули границы медицины с точки зрения того, что можно сделать, не прибегая к рискованным инвазивным процедурам. Такие устройства, как система daVinci, позволяют выполнять опасные операции с минимальным риском.
Такие устройства, как система daVinci, позволяют выполнять опасные операции с минимальным риском.
Аэрокосмические роботы
Аэрокосмические роботы в некоторой степени могут летать. Они отличаются от исследовательских роботов тем, что не включают в себя водные автоматы или поверхностные вездеходы. Распространенными формами этих роботов являются автономные или дистанционно управляемые дроны или космические корабли, которые можно использовать для различных целей, таких как исследования, военная разведка или исследование дальнего космоса.
Водные роботы
Водные роботы выходят далеко за рамки глубоководных исследований. Они могут работать с береговой охраной в качестве беспилотных лодок и часто используются морскими биологами и защитниками природы, чтобы помочь восстановить части морских экосистем, которые были разрушены в результате изменения климата и усилий по индустриализации, таких как морское бурение.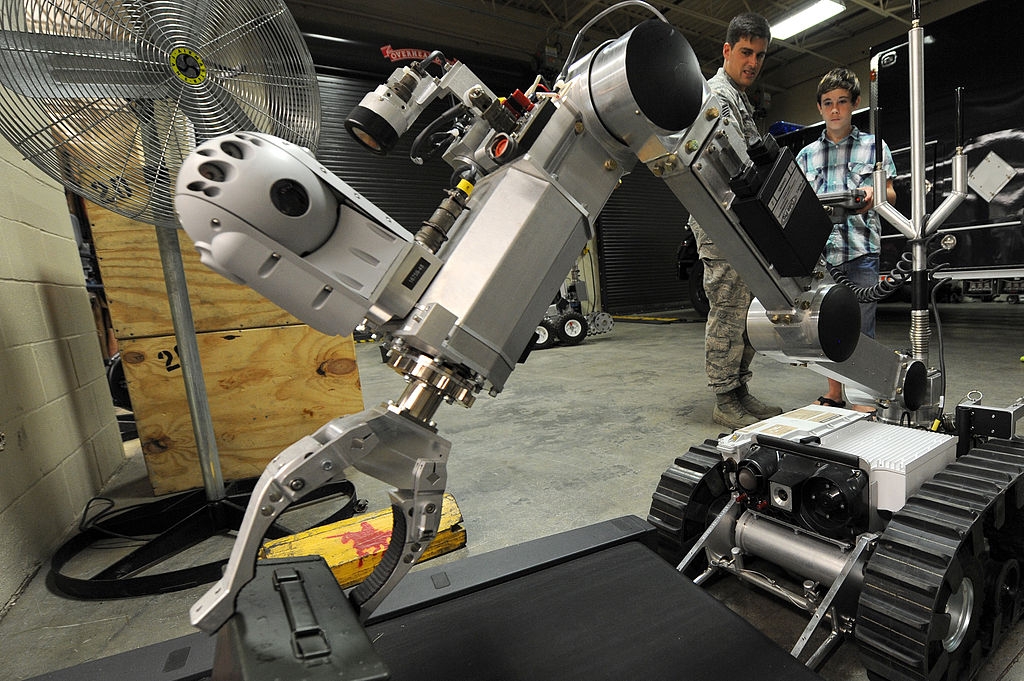
Интересно, что водная робототехника также является одной из передовых областей биоробототехники, в которой роботы, разработанные на основе движений органических животных в дикой природе, черпают вдохновение.
Источник: botmag.com
Многие исследователи добились больших успехов в моделировании своих плавательных роботов на основе обычных подводных видов, таких как рыбы или угри, чьи врожденные способности ориентироваться в подводном морском ландшафте намного превосходят традиционные методы передвижения созданных человеком морских кораблей.
Кибернетический зверинец
С таким количеством различных возможностей и применений в области робототехники может быть трудно отличить нужные вам изобретения от бесчисленного множества других с аналогичной функцией. Пока вы помните о намерениях изобретателя, у вас не должно возникнуть проблем с идентификацией робота во всех ваших будущих начинаниях.
Если вам интересно узнать больше о разработке и исследованиях этих различных типов роботов, ознакомьтесь с нашим руководством: Что такое робототехника.
Пайпер Томсон
Пайпер — бывший сотрудник G2. Родом из Цинциннати, штат Огайо, они окончили Кеньон-колледж со степенью в области социологии. Их интересы включают подкасты, скалолазание и понимание того, как люди формируют системы знаний в эпоху цифровых технологий. (они/они/их)
Что такое робот? | Национальное географическое общество
СТАТЬЯ
СТАТЬЯ
Узнайте о трех основных компонентах, которые делают роботов особенными.
Оценки
5 — 12
Тема
Инжиниринг
Изображение
Роботы 3D Landing страница
фотография. Машина, которая немного похожа на нас с вами? Реальность такова, что роботы могут быть разных форм и размеров. Им не нужно быть похожими на людей — на самом деле, большинство из них не похожи.
Внешний вид робота зависит от его назначения. Летающие роботы могут выглядеть как вертолеты или иметь крылья, как у насекомых или птиц. Роботы-уборщики часто выглядят как маленькие пылесосы. У роботов, предназначенных для взаимодействия с людьми, часто есть лицо, глаза или рот — как и у нас! Похожи они на нас или нет, у большинства роботов есть три основных компонента, которые делают их роботами: датчики, приводы и программы. Вместе эти компоненты отличают робота от другой электроники и гаджетов, которые могут быть у вас дома, таких как компьютер, стиральная машина или тостер. Датчики, приводы и программы Во-первых, у робота есть датчиков , которые позволяют ему воспринимать мир. Точно так же, как у нас есть глаза, чтобы чувствовать свет, уши, чтобы чувствовать звук, и нервы в нашей коже, которые чувствуют, если что-то касается нас, у роботов есть датчики света и камеры, чтобы они могли «видеть», микрофоны, чтобы они могли «слышать», и давление. датчики, чтобы они могли «чувствовать» окружающие их предметы.
Кредиты
Кредиты мультимедиа
Аудио, иллюстрации, фотографии и видео указываются под активом мультимедиа, за исключением рекламных изображений, которые обычно ссылаются на другую страницу, содержащую кредит мультимедиа. Правообладателем для СМИ является лицо или группа, указанные в титрах.
Писатель
Редактор
Национальное географическое общество
Продюсеры
Национальное географическое общество
Саманта Зульке, Национальное географическое общество
другое
Последнее обновление
20 мая 2022 г.
Полномочия пользователя
Для получения информации о правах пользователя ознакомьтесь с нашими Условиями обслуживания. Если у вас есть вопросы о лицензировании контента на этой странице, свяжитесь с нами по адресу [email protected] для получения дополнительной информации и получения лицензии. Если у вас есть вопросы о том, как цитировать что-либо на нашем веб-сайте в вашем проекте или презентации в классе, обратитесь к своему учителю. Она или он лучше всего знает предпочтительный формат. Когда вы обратитесь к нему или к ней, вам потребуется название страницы, URL-адрес и дата доступа к ресурсу.
Мультимедиа
Если медиаресурс можно загрузить, в углу средства просмотра медиафайлов появится кнопка загрузки. Если кнопка не отображается, вы не можете загрузить или сохранить медиафайл.
Текст
Текст на этой странице можно распечатать и использовать в соответствии с нашими Условиями предоставления услуг.
 Внешний вид робота зависит от его назначения. Летающие роботы могут выглядеть как вертолеты или иметь крылья, как у насекомых или птиц. Роботы-уборщики часто выглядят как маленькие пылесосы. У роботов, предназначенных для взаимодействия с людьми, часто есть лицо, глаза или рот — как и у нас! Похожи они на нас или нет, у большинства роботов есть три основных компонента, которые делают их роботами: датчики, приводы и программы. Вместе эти компоненты отличают робота от другой электроники и гаджетов, которые могут быть у вас дома, таких как компьютер, стиральная машина или тостер. Датчики, приводы и программы Во-первых, у робота есть датчиков , которые позволяют ему воспринимать мир. Точно так же, как у нас есть глаза, чтобы чувствовать свет, уши, чтобы чувствовать звук, и нервы в нашей коже, которые чувствуют, если что-то касается нас, у роботов есть датчики света и камеры, чтобы они могли «видеть», микрофоны, чтобы они могли «слышать», и давление. датчики, чтобы они могли «чувствовать» окружающие их предметы.
Внешний вид робота зависит от его назначения. Летающие роботы могут выглядеть как вертолеты или иметь крылья, как у насекомых или птиц. Роботы-уборщики часто выглядят как маленькие пылесосы. У роботов, предназначенных для взаимодействия с людьми, часто есть лицо, глаза или рот — как и у нас! Похожи они на нас или нет, у большинства роботов есть три основных компонента, которые делают их роботами: датчики, приводы и программы. Вместе эти компоненты отличают робота от другой электроники и гаджетов, которые могут быть у вас дома, таких как компьютер, стиральная машина или тостер. Датчики, приводы и программы Во-первых, у робота есть датчиков , которые позволяют ему воспринимать мир. Точно так же, как у нас есть глаза, чтобы чувствовать свет, уши, чтобы чувствовать звук, и нервы в нашей коже, которые чувствуют, если что-то касается нас, у роботов есть датчики света и камеры, чтобы они могли «видеть», микрофоны, чтобы они могли «слышать», и давление. датчики, чтобы они могли «чувствовать» окружающие их предметы. Типы датчиков, которые нужны роботу, зависят от того, для чего он был создан. Робот-пылесос может использовать бампер с датчиками давления, чтобы понять, где находится стена. Летающий робот использует группу датчиков, называемых блоком инерциальных измерений (IMU), чтобы помочь ему сохранять равновесие во время полета. Некоторые датчики, используемые роботами, сильно отличаются от датчиков, используемых людьми. Во-вторых, у робота приводы , которые позволяют ему двигаться. Мы можем использовать наши ноги и ступни, чтобы ходить и бегать, и мы можем использовать наши руки, чтобы взять апельсин и очистить его. Робот может использовать исполнительные механизмы, такие как моторы и колеса, для управления местами и пальцевидные захваты, чтобы захватывать объекты и манипулировать ими или поворачивать их. В-третьих, роботу нужна программа , которая позволяет ему действовать самостоятельно на основе того, что он ощущает. Эта способность действовать самостоятельно называется автономией.
Типы датчиков, которые нужны роботу, зависят от того, для чего он был создан. Робот-пылесос может использовать бампер с датчиками давления, чтобы понять, где находится стена. Летающий робот использует группу датчиков, называемых блоком инерциальных измерений (IMU), чтобы помочь ему сохранять равновесие во время полета. Некоторые датчики, используемые роботами, сильно отличаются от датчиков, используемых людьми. Во-вторых, у робота приводы , которые позволяют ему двигаться. Мы можем использовать наши ноги и ступни, чтобы ходить и бегать, и мы можем использовать наши руки, чтобы взять апельсин и очистить его. Робот может использовать исполнительные механизмы, такие как моторы и колеса, для управления местами и пальцевидные захваты, чтобы захватывать объекты и манипулировать ими или поворачивать их. В-третьих, роботу нужна программа , которая позволяет ему действовать самостоятельно на основе того, что он ощущает. Эта способность действовать самостоятельно называется автономией. Давайте рассмотрим эту идею автономии более внимательно. Автономность Вы можете придумать что-нибудь автономное? У людей есть автономия, потому что они могут сами решать, как себя вести или двигаться — по крайней мере, большую часть времени! Ваш тостер, стиральная машина или игрушка с дистанционным управлением — это примеры машин, не имеющих автономии, потому что решения за них принимает человек. Когда робот автономен, это не совсем то же самое, что автономен человек, потому что человек все равно должен написать компьютерную программу, которая говорит роботу, что делать. Например, когда мы слушаем музыку, наш мозг говорит нам, как двигать ногами в такт — нам не нужен кто-то, кто будет двигать ногами за нас! Но что, если мы хотим построить робота, который может автономно танцевать в такт? Какие три основные вещи нам понадобятся? 1. Сенсор. Нам понадобится микрофон (датчик звука), чтобы робот мог слышать музыку.2. Приводы. Нам понадобятся приводы (например, двигатели с колесами), чтобы робот мог двигаться.
Давайте рассмотрим эту идею автономии более внимательно. Автономность Вы можете придумать что-нибудь автономное? У людей есть автономия, потому что они могут сами решать, как себя вести или двигаться — по крайней мере, большую часть времени! Ваш тостер, стиральная машина или игрушка с дистанционным управлением — это примеры машин, не имеющих автономии, потому что решения за них принимает человек. Когда робот автономен, это не совсем то же самое, что автономен человек, потому что человек все равно должен написать компьютерную программу, которая говорит роботу, что делать. Например, когда мы слушаем музыку, наш мозг говорит нам, как двигать ногами в такт — нам не нужен кто-то, кто будет двигать ногами за нас! Но что, если мы хотим построить робота, который может автономно танцевать в такт? Какие три основные вещи нам понадобятся? 1. Сенсор. Нам понадобится микрофон (датчик звука), чтобы робот мог слышать музыку.2. Приводы. Нам понадобятся приводы (например, двигатели с колесами), чтобы робот мог двигаться. 3. Программа. Нам нужно написать программу, которая говорит роботу: «Когда услышишь музыку, двигайся сюда». Нам также понадобится компьютер — мозг робота, — который мог бы обрабатывать всю сенсорную информацию и запускать программу, и какой-то источник питания (например, батарея), чтобы обеспечить электричеством нашего робота. На видео выше показан простой робот, запрограммированный на автономный танец, когда он слышит музыку. Посмотрите на эти танцевальные движения! Некоторые роботы более продвинуты, чем наш маленький танцующий робот. Автономные автомобили, например, имеют усовершенствованные датчики, которые позволяют им измерять расстояние до всех объектов в их окружении и строить трехмерную (3-D) карту местности. Затем у них есть продвинутая программа, которая понимает значение автомобилей, дорог и препятствий на 3D-карте. Основываясь на этом понимании, программа управляет скоростью и рулевым управлением робота. Другие роботы разрабатываются, чтобы помогать по дому, исследовать космос или повышать нашу эффективность на работе.
3. Программа. Нам нужно написать программу, которая говорит роботу: «Когда услышишь музыку, двигайся сюда». Нам также понадобится компьютер — мозг робота, — который мог бы обрабатывать всю сенсорную информацию и запускать программу, и какой-то источник питания (например, батарея), чтобы обеспечить электричеством нашего робота. На видео выше показан простой робот, запрограммированный на автономный танец, когда он слышит музыку. Посмотрите на эти танцевальные движения! Некоторые роботы более продвинуты, чем наш маленький танцующий робот. Автономные автомобили, например, имеют усовершенствованные датчики, которые позволяют им измерять расстояние до всех объектов в их окружении и строить трехмерную (3-D) карту местности. Затем у них есть продвинутая программа, которая понимает значение автомобилей, дорог и препятствий на 3D-карте. Основываясь на этом понимании, программа управляет скоростью и рулевым управлением робота. Другие роботы разрабатываются, чтобы помогать по дому, исследовать космос или повышать нашу эффективность на работе. Каким бы ни было их назначение, каждому роботу потребуется тщательно продуманный набор датчиков, приводов и программ. Хотя роботы становятся все более совершенными, важно понимать их ограничения. Как они могут взаимодействовать с людьми естественным образом? Как они приспосабливаются к реальному миру, который часто полон неожиданных событий, которые трудно понять машинам? И как мы можем сделать батареи, которые будут поддерживать их питание в течение длительного времени и которые не будут слишком тяжелыми для переноски? Это вопросы, над решением которых усердно работают специалисты по робототехнике.
Каким бы ни было их назначение, каждому роботу потребуется тщательно продуманный набор датчиков, приводов и программ. Хотя роботы становятся все более совершенными, важно понимать их ограничения. Как они могут взаимодействовать с людьми естественным образом? Как они приспосабливаются к реальному миру, который часто полон неожиданных событий, которые трудно понять машинам? И как мы можем сделать батареи, которые будут поддерживать их питание в течение длительного времени и которые не будут слишком тяжелыми для переноски? Это вопросы, над решением которых усердно работают специалисты по робототехнике.
