Содержание
исторические факты и наши дни. Первый робот. Использование роботов в различных сферах деятельности
Различные автоматические устройства занимают настолько прочное место в жизни человека, что без них уже практически невозможно представить себе современную цивилизацию. Однако история робототехники очень длинна, люди учились создавать различные машины практически в течение всей своей истории. Конечно, древние машины не могут сравниться с современными, это были скорее их подобия. Однако они демонстрируют, что идеи создания машин, в частности искусственной имитации человека, прослеживаются в самых древних слоях человеческой истории.
Появление слова «робот»
Это слово ввел в обиход знаменитый чешский писатель Карел Чапек. Он впервые использовал этот термин в названии своей пьесы «Россумские универсальные роботы», увидевшей свет в 1920 году. Однако его нельзя считать автором слова «робот», оно всего лишь происходит от чешского robota, обозначающего всего лишь «работу». По заявлению самого писателя, слово предложил его брат Йозеф, тогда как сам Чапек не мог решить, как же назвать своих персонажей.
Сюжет пьесы Чапека многим покажется знакомым: поначалу люди эксплуатируют своих механических слуг на различных тяжелых работах, потом те восстают и, в свою очередь, обращают в рабство людей.
В современном же понимании «робот» — это механическое устройство, действующее по заданной программе самостоятельно, без человеческой помощи.
Понятие робототехники и ее законы
В 1941 году в рассказе «Лжец» были сформулированы знаменитые законы робототехники Айзека Азимова, которые призваны регулировать поведение этих машин.
- Робот не может нанести урон человеку либо своим бездействием допустить, чтобы этот урон был нанесен.
- Робот обязан подчиняться человеку, пока это не идет вразрез с первым законом.
- Робот может защищать себя, если это не противоречит первым двум законам.
Впоследствии, отталкиваясь от этих законов, сам Азимов и другие авторы создали огромный пласт произведений, посвященных взаимоотношениям людей и машин.
Азимовым же было введено само понятие «робототехника». Слово, когда-то употребленное в фантастическом рассказе, сейчас является названием серьезной научной отрасли, занимающейся разработкой и конструированием различных механизмов, автоматизацией процессов и т. д.
Слово, когда-то употребленное в фантастическом рассказе, сейчас является названием серьезной научной отрасли, занимающейся разработкой и конструированием различных механизмов, автоматизацией процессов и т. д.
Машины древнего мира
История робототехники уходит корнями в глубокую древность. Некое подобие роботов изобрели еще в Древнем Египте более четырех тысяч лет назад, когда жрецы прятались внутри статуй богов и разговаривали оттуда с людьми. У статуй при этом двигались руки и головы.
Если дать некоторую волю фантазии, можно обнаружить упоминания о роботах, например, в мифах Древней Греции. Еще у Гомера упомянуты механические слуги, которых создавал для себя древнегреческий бог Гефест, великан Талос, сотворенный им же из бронзы для охраны Крита от неприятеля. Платон повествует об ученом Архите из Тарентума, сделавшем искусственного голубя, способного летать.
Архимедом в III веке до нашей эры был якобы изготовлен аппарат, крайне напоминающий современный планетарий: прозрачный шар, приводившийся в движение водой, на котором отображалось движение всех небесных тел, известных на тот момент.
В Средние века люди уже начали создавать настоящие машины, способные делать множество интересных вещей. К периоду Средневековья относятся и попытки создания первых человекообразных машин.
Альберт Великий, известный алхимик XIII века, создал андроида, выполнявшего функции привратника, открывавшего дверь на стук и кланявшегося гостям (андроид – робот, копирующий человека внешностью и поведением). Он же сконструировал механизм, способный говорить человеческим голосом, так называемую говорящую голову.
Кто первым создал робота?
Проект первого робота, о котором сохранились достоверные сведения, создал Леонардо да Винчи. Это был андроид, выглядевший как рыцарь в доспехах. Согласно чертежам Леонардо, он мог двигать руками и головой. Остается открытым вопрос, почему знаменитый изобретатель не наделил своего рыцаря возможностью двигать ногами, т. е. ходить. Возможно, он считал это технически сложной проблемой (что полностью соответствует истине). Либо же предполагалось, что рыцарь должен ездить на лошади, и подвижность ног для него необязательна.
Точно не известно, смог ли да Винчи построить своего «терминатора», зато он сконструировал робота-льва, который при появлении короля разрывал себе когтями грудь, показывая скрытый в ней герб Франции.
Кроме этого, у Леонардо также были идеи о взаимодействии механизмов с человеческими органами, т. е. он уже на рубеже XV-XVI веков предвосхитил современные разработки протезов, управляющихся непосредственно нервной системой человека.
Механические музыканты и ходячие паровозы
В течение XVI века в Европе было создано множество устройств, в основном с использованием заводных (часовых) механизмов. Например, в Германии были изготовлены искусственная муха и орел, способные летать, а в Италии – женщина-робот, игравшая на лютне.
В течение XVII века европейцы разрабатывают и усовершенствуют первые механические «калькуляторы». Поначалу они могут лишь складывать и вычитать, но к концу века способны уже к делению и умножению.
Этот момент можно считать поворотным в истории робототехники, так как параллельно начинают развиваться две отрасли знания, которые в будущем будут использованы для создания современных роботов:
- разработка машин, имитирующих и заменяющих человека и его действия;
- создание устройств, предназначенных для хранения и обработки информации.


Параллельно продолжают создаваться механические человекоподобные устройства, способные играть на музыкальных инструментах, писать и рисовать.
Наступление XIX века ознаменовалось началом «дружбы» людей с электричеством. Оно начинает быстро распространяться и проникать во многие сферы человеческой деятельности. Одновременно совершенствуются различные механические вычислительные и аналитические машины, были изобретены телефон и телеграф.
Известны истории о различных человекоподобных машинах, якобы изобретенных и использовавшихся в США в течение XIX века:
- в 1865 году конструктором Джонни Брейнардом был создан так называемый паровой человек, которого запрягали в повозку вместо лошади. Это был, по сути, паровоз, выглядевший как человек (только намного больше габаритами). Его нужно было постоянно «топить», и управлялся он, как лошадь, вожжами. Утверждалось, что он мог «ходить» со скоростью до 50 км/ч.
- Через некоторое время Фрэнк Рид испытывает уже «электрического человека», однако об этом изобретении мало что известно.
- В 1893 году Арчи Кемпион представил образец искусственного солдата на паровом ходу под названием Boilerplate, который якобы неоднократно использовался на практике, т. е. в боях.

Все эти сведения интересны, но вызывают некоторые сомнения, поскольку, несмотря на вроде бы выдающиеся характеристики, данные изделия так и не пошли в серийное производство, в отличие от паровозов, пароходов и так далее. Скорее всего, они существовали только в виде опытных экземпляров и так и не нашли своего применения, будучи, по сути, игрушками для взрослых.
ХХ век – эра расцвета робототехники
В XX веке история робототехники вступает в свою финальную стадию, приведшую к созданию тех роботов, которых человечество знает сейчас.
Совершаются прорывы в области электроники, появляются диоды и триоды. Первые ламповые компьютеры сначала разрабатываются в теории, а затем и реализуются.
В то же время создается первый электронный человекоподобный робот, управляемый на расстоянии, способный двигаться и разговаривать. Затем появляется электронная собака, реагирующая на свет и способная лаять.
Затем появляется электронная собака, реагирующая на свет и способная лаять.
К концу первой трети XX века радиоуправляемые андроиды учатся говорить по телефону, ходить, даже выступать в качестве лекторов на выставке, курить сигареты и так далее. В тот момент многие уже думали, что осталось немного – и роботы заменят людей. Однако потом становится ясно, что применить андроидов того времени для каких бы то ни было работ пока не получится из-за недостаточного на тот момент развития технологий.
Но эти выводы не останавливают изобретателей – андроиды продолжали появляться и разрабатываются до сих пор.
В 1940–1950 годах продолжается совершенствование электроники, компьютеров и компьютерного программирования, появляется понятие «искусственный интеллект», после чего происходит существенный скачок в развитии робототехники, роботы начинают быстро «умнеть».
Наконец, с начала 60-х начинает осуществляться мечта человечества – машины начинают заменять людей на тяжелых, опасных и неинтересных работах. Появляются первые роботы-манипуляторы современного типа. Сначала они выполняют только самые неудобные для человека операции, затем создаются автоматические сборочные линии.
Появляются первые роботы-манипуляторы современного типа. Сначала они выполняют только самые неудобные для человека операции, затем создаются автоматические сборочные линии.
Со временем начинается повальное увлечение людей роботами. Для детей открывается множество кружков и школ робототехники, выпускаются различные развивающие игрушки и конструкторы. Развлекательная индустрия также не остается в стороне — в 1986 году выходит первая часть фильма «Терминатор», которая произвела настоящий фурор по всему миру.
Отечественная робототехника
История робототехники в России, также как и в Европе, насчитывает не одно столетие. С некоторого времени российские ученые не отстают от своих европейских коллег в конструировании различных автоматов: в последней трети XVIII века в России создается машина для вычислений, названная машиной Якобсона, а в 1790 году Иван Петрович Кулибин создает свои знаменитые «яичные» часы. В них были встроены несколько человеческих фигурок, которые выполняли определенные действия, также часы играли гимн и другие мелодии.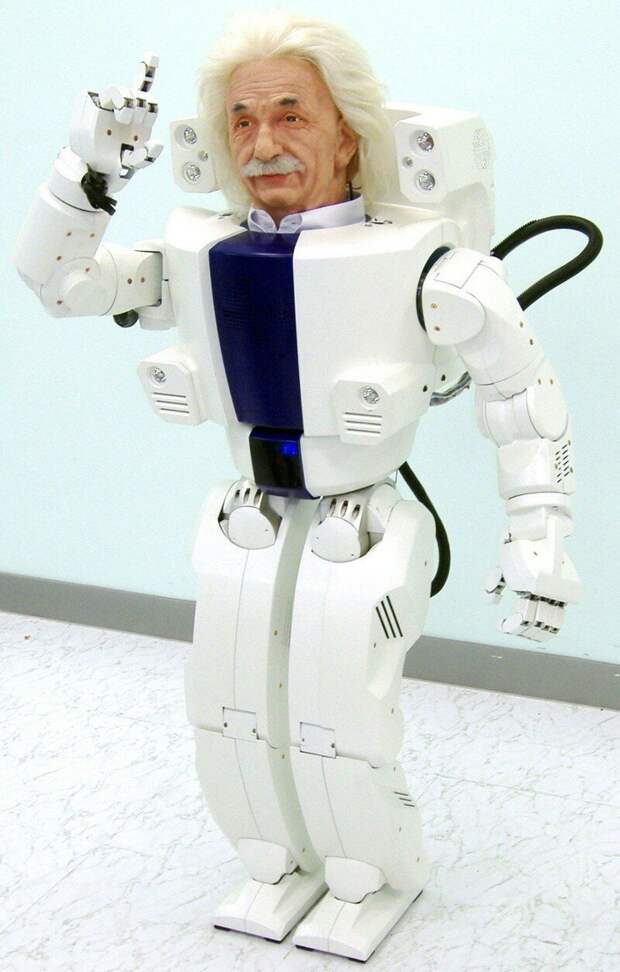
Именно русские ученые совершили несколько знаковых для истории робототехники открытий. Семен Николаевич Корсаков в 1832 году заложил основы информатики. Он разработал несколько машин, способных производить интеллектуальные вычисления, применив для их программирования перфокарты.
Борис Семенович Якоби в 1838 году изобрел и испытал первый электромотор, принципиальная конструкция которого остается актуальной и поныне. Якоби, установив его на лодку, совершил с его помощью прогулку по Неве.
Академик П. Л. ЧебышевВ 1878 г. представил первый прототип шагающего транспортного средства – стопоходящую машину.
М. А. Бонч-Бруевич изобрел в 1918 году триггер, благодаря чему стало возможным создание первых компьютеров, а В. К. Зворыкин чуть позже демонстрирует электронную трубку, давшую начало телевидению.
Первая ЭВМ появляется в СССР в 1948 году, а уже в 1950-м выпущена МЭСМ (малая электронная счетная машина), на тот момент самая быстрая в Европе.
Официально историю робототехники в России можно отсчитывать с 1971 года. Тогда в Московском высшем техническом училище имени Баумана создается кафедра специальной робототехники и мехатроники, которую возглавляет академик Е. П. Попов. Он стал создателем отечественной школы инженерной робототехники.
Тогда в Московском высшем техническом училище имени Баумана создается кафедра специальной робототехники и мехатроники, которую возглавляет академик Е. П. Попов. Он стал создателем отечественной школы инженерной робототехники.
Отечественная наука достойно конкурировала с зарубежной. Еще в 1974 году советский компьютер стал чемпионом мира на шахматном турнире среди машин. А созданный в 1994 году суперкомпьютер «Эльбрус-3» вдвое превосходил по скорости работы самый мощный американский компьютер того времени. Однако он не был пущен в серийное производство, возможно, из-за тяжелой ситуации в стране на тот момент.
Русские автоматические космонавты
Официально начало робототехники в России датируется 1971 годом. Именно тогда она была официально признана наукой в СССР. Хотя к тому времени автоматы российского производства уже вовсю бороздили просторы космоса.
В 1957 году вышел на орбиту первый в мире искусственный спутник Земли. В 1966 году станция «Луна-9» передает на Землю радиосигнал с поверхности Луны, а аппарат «Венера-3», успешно достигнув планеты, установил там вымпел СССР.
Всего через четыре года запущены еще две лунные станции и обе выполнили свою миссию успешно. Аппарат «Луноход-1», доставленный станцией «Луна-17», проработал в три раза дольше, чем планировалось, и передал советским ученым множество ценнейшей информации.
В 1973 году еще одна станция этой же серии доставила на Луну еще один луноход, который также справился со своей задачей на отлично.
Робототехника в наше время
Современные роботы проникли в очень многие сферы человеческой жизни. Их многообразие потрясает: здесь и просто детские игрушки, и целые автоматизированные заводы, хирургические комплексы, искусственные домашние питомцы, военные и гражданские беспилотные аппараты. Их постоянной разработкой и совершенствованием занимается множество организаций в мире. В России ведущие позиции в научной робототехнике занимает ЦНИИ РТК (Центральный научно-исследовательский институт робототехники и технической кибернетики) в Санкт-Петербурге, основанный 1961 году как конструкторское бюро при Политехническом институте. В этом крупнейшем центре разрабатывались электронные системы для корабля «Буран», станций серии «Луна» и международной космической станции.
В этом крупнейшем центре разрабатывались электронные системы для корабля «Буран», станций серии «Луна» и международной космической станции.
Специальность «Мехатроника и робототехника» и ей подобные присутствуют во многих технических университетах мира. Специалисты с таким образованием весьма востребованы на рынке труда, ведь автоматизация проникает все глубже во многие сферы человеческой деятельности. Для увлекающихся предметом в свободное время выпущено множество книг по робототехнике, как в России, так и в других странах.
Несмотря на то что нынешняя техника достигла небывалых высот, и роботы активно используются людьми, их человекоподобные представители — андроиды — пока остаются «не у дел». Они совершенствуются, разрабатываются все более сложные модели, но в практическом применении они до сих пор безнадежно проигрывают своим колесным, гусеничными и даже стационарным «коллегам» и остаются, по большому счету, игрушками. Дело в том, что человеческая ходьба – очень сложный процесс, сымитировать который машине не так-то просто.
Кроме того, с практической точки зрения, именно в человекоподобных роботах нет какой-то острой необходимости. В промышленности с успехом работают стационарные манипуляторы, объединенные в автоматические производственные линии. Там же, где требуется передвигаться – будь то погрузочные работы на складе, разминирование бомб, обследование разрушенных зданий, – колесный и гусеничный привод куда проще и эффективнее, нежели имитация человеческих ног.
Тем не менее люди не отказываются от работы над андроидами, по всему миру регулярно проводятся соревнования, на которых представители различных школ робототехники демонстрируют свое мастерство в управлении своими изделиями. Постоянно устраиваются турниры и непосредственно между машинами, например, по шахматам или футболу.
Классификация роботов
Существует несколько методов классификации. По характеру выполняемых работ автоматы делятся на промышленные, строительные, для сельского хозяйства, для транспортировки, бытовые, военные, охранные, медицинские и исследовательские.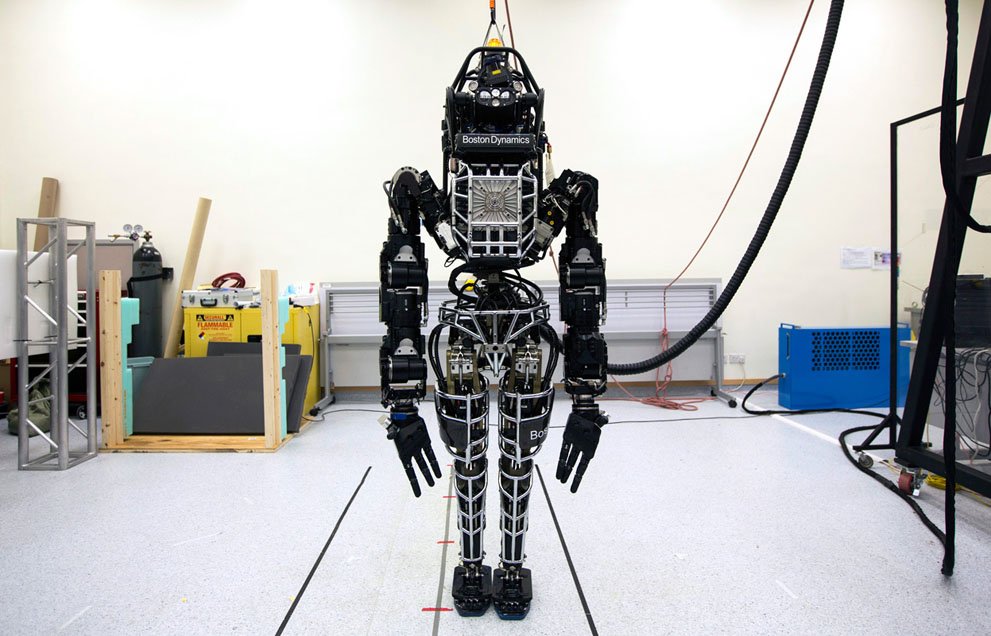
По типу управления они подразделяются на управляемые с помощью оператора, полуавтономные и полностью автономные.
Машины первого типа являются просто дистанционно управляемыми машинами (простейший пример – детский радиоуправляемый автомобильчик или вертолет). Полуавтономные могут выполнять самостоятельно часть операций, но в ключевых моментах все же требуется вмешательство человека. Полностью автономные роботы весь спектр операций выполняют самостоятельно (например, манипуляторы автоматических сборочных линий).
По уровню мобильности выделяют следующие классы роботов: стационарные и мобильные. Стационарные – это те самые манипуляторы, которые все привыкли видеть, например, на автомобильных заводах. Мобильные дополнительно делятся на шагающие, колесные либо на гусеничном ходу.
Ударники современного производства
Различные промышленные производства являются той отраслью, в которой находит практическое применение основная часть современных автоматических устройств.
История промышленной робототехники начинается в 1725 году, когда во Франции была изобретена перфолента, примененная для программирования ткацких станков.
Начало автоматизации производства пришлось на XIX век, когда во Франции стартовало массовое производство автоматических ткацких станков на перфокартах.
Первую конвейерную линию для сборки автомобилей установил на своем заводе Генри Форд в 1913 году. Сборка одного автомобиля занимала порядка полутора часов. Конечно же, эта линия еще не была полностью автоматизированной, как сейчас, но это был выход на качественно новый уровень производства.
Официально использование роботов на производстве начинается в 1961 году, когда на заводе General Motors в Нью-Джерси был установлен первый официально изготовленный манипулятор. Работала эта машина на гидроприводах и программировалась через магнитный барабан.
Бум разработок в сфере промышленной автоматизации пришелся на 70-е годы XX века. В 1970 году в США был создан первый манипулятор современного типа для использования в промышленности: он обладал электроприводами с шестью степенями свободы и управлялся с компьютера. Параллельно разработки велись в Швейцарии, Германии и Японии. В 1977 году выпущен первый робот японского производства.
Параллельно разработки велись в Швейцарии, Германии и Японии. В 1977 году выпущен первый робот японского производства.
В начале 80-х General Motors начинает автоматизацию своего производства, а уже в 1984 году начала его и Россия – «АвтоВАЗ» приобретает лицензию на самостоятельное производство роботов у немецкой фирмы KUKA Robotics. Однако пальма первенства все же за японцами – в середине 90-х в Японии было сконцентрировано две трети от общего количества роботов во всем мире, сейчас – примерно половина.
Сегодня представить себе автомобильное, да и любое другое поточное производство без механических помощников практически невозможно. Первое место занимают сварочные автоматы. Точность роботизированной лазерной сварки составляет десятые доли миллиметра. Такой аппарат способен одновременно заниматься и раскройкой металла на детали.
Следом идут механизмы, осуществляющие погрузочные и разгрузочные работы, подачу заготовок в станки и складирование готовых изделий.
На третьем месте по степени автоматизации стоит кузнечно-литейное производство. На сегодняшний момент почти все такие цеха в Европе роботизированы, так как условия работы там очень тяжелы для людей.
На сегодняшний момент почти все такие цеха в Европе роботизированы, так как условия работы там очень тяжелы для людей.
Другие операции, для которых чаще всего применяются сейчас автоматы – гибка труб, сверление отверстий, фрезеровка и шлифовка поверхностей.
Где машины могут заменить людей
Ответ на вопрос о том, человек или робот должен выполнять ту или иную работу, кроется в различиях между людьми и машинами. На данный момент даже самые совершенные из машин действуют по определенным, заранее заложенным в программу алгоритмам (пускай порой и весьма сложным). У них нет свободы воли, свободы выбора, желаний, порывов, ничего из того, что определяет творческую составляющую человека.
Робот может выполнить работу большой сложности и точности, сможет выполнить эту работу в таких условиях, в которых человек не прожил бы и часа. Но он не сможет написать книгу или сценарий нового фильма, создать живописное полотно, если только это не было заранее заложено в его память человеком.
Поэтому профессии творческие, где важна нестандартность, нешаблонность мышления, безусловно, остаются за людьми. Робот может быть сварщиком, грузчиком, маляром, даже космонавтом, но он не сможет стать (по крайней мере, на нынешнем этапе развития) писателем, поэтом или художником.
Стоит ли бояться роботов
Самый главный страх человечества в отношении машин – это боязнь того, что они, став совершенными, однажды перестанут подчиняться и начнут жить своей жизнью, превратив в рабов уже людей. Этот страх шел рука об руку с развитием робототехники. Он находит свое выражение как в мифологии (например, еврейский миф о големе, восставшем против своего создателя), так и в искусстве. Известнейшие фильмы «Матрица», «Терминатор», великое множество книг, повествующих о восстании машин. Пьеса Карела Чапека, давшая жизнь слову «робот», также заканчивается порабощением человечества его бывшими слугами.
Однако на современном этапе развития науки эти страхи бессмысленны. У роботов отсутствует сознание, аналогичное человеческому, поэтому у них не может быть вообще никаких желаний, не говоря уже о стремлении захватить мир.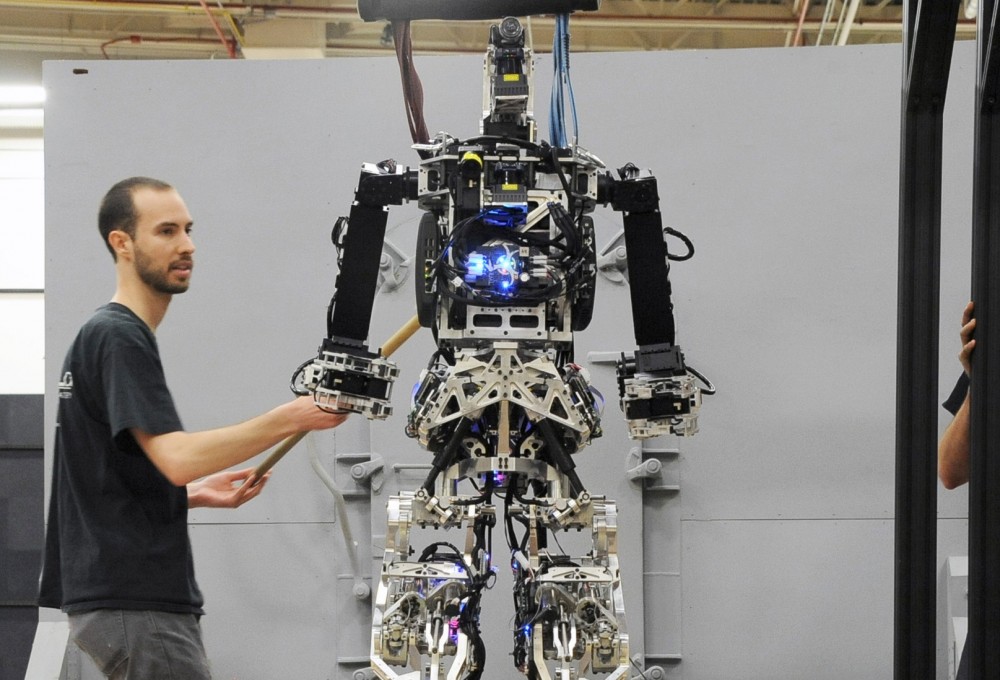
Для того чтобы воспроизвести сознание у машины, человеку необходимо сначала разобраться, что представляет собой его собственное сознание, как и из чего оно формируется. Ответ на этот вопрос кроется в глубинах человеческого мозга, который исследован еще далеко не полностью.
Для того чтобы «восстать», роботам необходимо понимать, что такое мировое господство и для чего им это нужно.
А до этого момента любая, даже самая сложная и совершенная машина принципиально ничем не отличается от кухонного комбайна или кофемолки. Поэтому вопрос о том, кто в итоге будет главным на Земле – робот или человек, пока не является насущным.
История робототехники. Происхождение первых роботов
История автоматизированных механизмов насчитывает тысячи лет, от роботов — слуг богов, упоминаемых в греческой мифологии, до сложных китайских астрономических водяных башенных часов XI века. Даже Леонардо да Винчи разработал ряд автоматов, включая самоходные тележки и роботов-рыцарей. Итак, когда же автоматизированные машины стали роботами?
Современная эпоха робототехники началась во время промышленной революции, с началом использования пара и электричества, проложившими дорогу силовым двигателям и механизмам.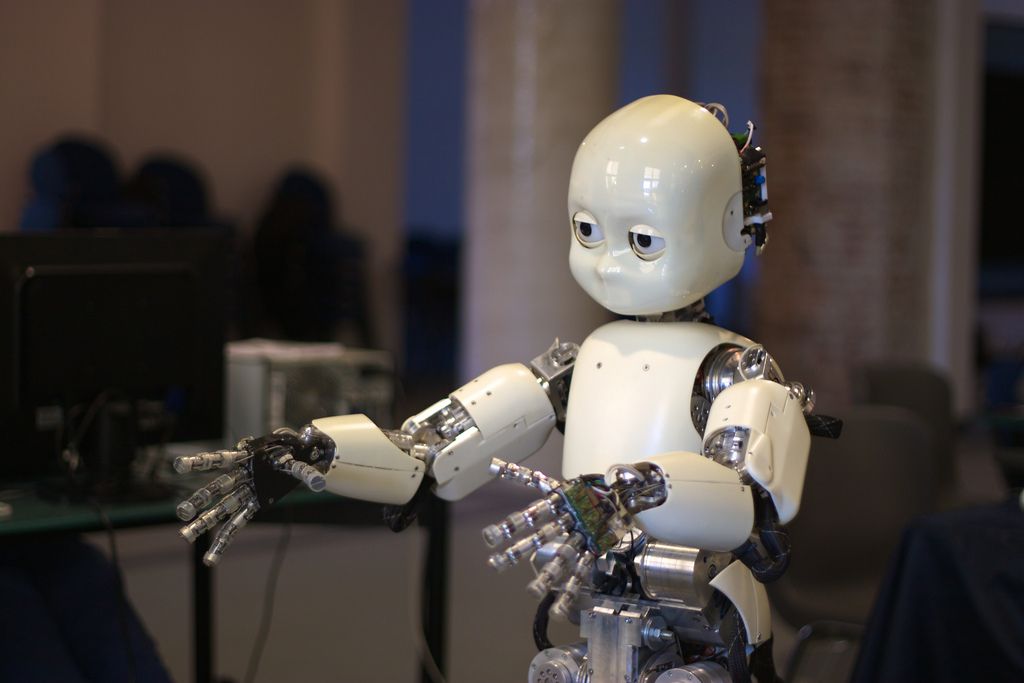 Изобретения и открытия, сделанные Томасом Эдисоном и Николой Тесла, способствовали переходу в новую эру робототехники. В 1898 году Тесла представил свою радиоуправляемую лодку, похваставшись, что стал первым в будущей гонке роботов. Многие считают это событие датой рождения робототехники.
Изобретения и открытия, сделанные Томасом Эдисоном и Николой Тесла, способствовали переходу в новую эру робототехники. В 1898 году Тесла представил свою радиоуправляемую лодку, похваставшись, что стал первым в будущей гонке роботов. Многие считают это событие датой рождения робототехники.
Тем не менее слово «робот» не использовалось вплоть до 1920 года, когда чешский драматург Карел Чапек написал научно-фантастическую пьесу «R. U. R.», описывающую восстание роботизированных рабочих фабрики против людей-владельцев. А в 1941 году не менее известный писатель-фантаст Айзек Азимов придумал термин «робототехника», упомянув его в коротком рассказе «Лжец!».
Спустя полгода Азимов написал рассказ «Хоровод», в котором с оптимизмом характеризовал роботов как полезных слуг человека. В этом же рассказе впервые упоминаются «три закона робототехники» Азимова, которые продолжают влиять на литературу, кино и науку по мере продолжения исследований в области искусственного интеллекта.
Ключевые изобретения XX века, включая цифровой компьютер, транзистор и интегральную схему, привели к тому, что ученые смогли начать разработку электронного, программируемого мозга для роботов. Промышленные роботы сейчас — обычное явление на современном производстве. Они используются для решения самых разнообразных задач — от транспортировки материалов до сборки деталей.
Промышленные роботы сейчас — обычное явление на современном производстве. Они используются для решения самых разнообразных задач — от транспортировки материалов до сборки деталей.
В биомедицинской, обрабатывающей, транспортной, космической и оборонной промышленности роботы используются намного чаще, чем раньше. Значительные достижения в области программного обеспечения и искусственного интеллекта (ИИ) привели к созданию роботов, имитирующих базовую форму и взаимодействие людей, таких как двуногий «Асимо» корпорации Honda. Суперкомпьютер IBM Watson, оснащенный продвинутой системой ИИ, был первоначально разработан для соревнования с людьми на американской викторине Jeopardy!, в которой победил, а затем поступил в коммерческую эксплуатацию в качестве врача-диагноста онкологических заболеваний.
Четырехногий робот «БигДог» компании Boston Dynamics создан для перемещения по пересеченной местности и способен перевозить тяжелые грузы. Современные системы автопилотирования, интегрированные в самолеты, беспилотные автомобили и даже космические планетоходы, такие как «Кьюриосити», блуждавший по поверхности Марса, демонстрируют, насколько сложными стали программируемые роботы.
Робот «БигДог»
Роботы больше не ассоциируются с греческими мифами или голливудскими блокбастерами. Дроиды, беспилотные летательные аппараты и роботы теперь широко распространенная и важная часть нашего общества.
Первый медицинский робот
Первое официально зарегистрированное применение медицинского робота относится к 1984 году, когда «Артробот», разработанный в Ванкувере Джефом Окинлеком и доктором Джеймсом Мак-Уэном в сотрудничестве с хирургом Брайаном Дэйем, использовался при проведении ортопедической операции.
Роботизированный хирургический комплекс «да Винчи» позволяет выполнять сложнейшие операции в больницах по всему миру.
«Артробот» — небольшой робот для выполнения артропластики тазобедренного сустава (операции по восстановлению функции сустава). Он был спроектирован для точного сверления тазобедренных суставов, с возможностью программирования для создания полостей в определенных позициях и под определенным углом для последующей имплантации протезов.
Несмотря на то что небольшие и относительно простые усовершенствования и модификации оригинального «Артробота» привели к использованию роботов в более сложных хирургических операциях, таких, как полная замена коленного сустава, подобные новаторские решения в области медицинской робототехники таковыми и оставались вплоть до 1997 года, пока медицинские роботы не получили распространение.
Система «да Винчи» корпорации Intuitive Surgical Inc стала первым хирургическим роботом, получившим одобрение Управления по контролю за качеством пищевых продуктов и лекарственных препаратов США. Робот «да Винчи» представляет собой полноценный хирургический комплекс с набором инструментов, камерами, датчиками и прочими принадлежностями.
Знаете ли вы? В 1998 году в Лейпциге было осуществлено первое в мире аортокоронарное шунтирование сердца с использованием хирургического комплекса «да Винчи».
Первый военный робот
Изобретенная в 1898 году Николой Тесла радиоуправляемая лодка, предназначенная для использования в военных целях и предлагаемая США с Великобританией, так и не была разработана.
Танк Т-26,набазе которого был создан телетанк ТТ-26
Во Второй мировой войне впервые были применены военные роботы в виде дистанционно управляемых беспилотных машин — немецкой самоходной мины «Голиаф» и советского танка «Телетанк». Телетанки были созданы на базе легких танков T-26, оснащенных гидравликой и аппаратурой телеуправления. Телетанки несли пулемет, огнемет, а также оборудование для установки дымовой завесы и использования химического оружия, что означало, что они были грозным орудием на поле боя. Немецкие «Голиафы», с другой стороны, были спроектированы как мобильные наземные мины, которых на удаленном управлении можно было подвести к вражеской технике или пехоте и детонировать.
Хотя и «Голиаф», и «Телетанк» были разработаны в одно и то же время, советские безэкипажные танки стали использоваться первыми и применялись во время Советско-финской войны (1939– 1940) в Восточной Финляндии.
Первый гуманоидный робот
Человекоподобные роботы, часто называемые андроидами в научной фантастике, проектируются с учетом человеческих форм. Простые гуманоидные автоматоны создавались испокон веков и постепенно совершенствовались для более точной имитации внешнего вида и поведения человека. Одним из первых задокументированных примеров является механический рыцарь Леонардо да Винчи.
Простые гуманоидные автоматоны создавались испокон веков и постепенно совершенствовались для более точной имитации внешнего вида и поведения человека. Одним из первых задокументированных примеров является механический рыцарь Леонардо да Винчи.
Робот-рыцарь Леонардо управлялся комбинацией шкивов и тросов, которые позволяли ему стоять, сидеть и независимо двигать руками. Он имел человеческую форму и даже был одет в доспехи, словно рыцарь. Хотя механизм да Винчи примитивен по сегодняшним меркам, ему не хватает искусственного интеллекта и дистанционного управления, но он опережал свое время в XV веке.
Да Винчи использовал во многих своих изобретениях шкивы, гири и шестерни, в том числе и в самоходной тележке, которую многие считают первым роботом. Позже он занялся дизайном робота-рыцаря для королевского театрализованного представления в Милане, которое состоялось в конце 1490-х годов.
Чертежи робота-рыцаря Леонардо да Винчи до сих пор используются современными робототехниками и даже вносят свою лепту в разработку роботов для NASA.
Первый роботизированный транспорт
После Всемирной выставки 1964 года писатель-фантаст Айзек Азимов в своих записях предсказал, что спустя 50 лет автомобили будут управляться «робомозгами». В течение многих лет после этого беспилотные транспортные средства существовали лишь в виде теоретических концепций и исследовательских проектов.
Компания Mercedes-Benz с 1980-х годов занимается исследованиями в области беспилотных транспортных средств
Настоящий прогресс начался в 1986 году, когда в Мюнхенском университете был запущен проект PROMETHEUS под управлением Европейского агентства координации исследований (EUREKA, European Research Coordination Agency). В течение почти десятилетия команда разработчиков трудилась над проектом беспилотного автомобиля под названием VITA, оборудованного датчиками, позволяющими регулировать скорость машины при обнаружении опасности.
В 1994 году автомобиль VITA совершил 1000-километровую поездку по парижскому шоссе в условиях плотного трафика, достигнув скорости в 128 километров в час. Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
Первый космический робот
Можно сказать, что «Спутник-1», запущенный СССР в 1957 году, стал первым роботом в космосе. А «Робонавт», разработанный в сотрудничестве General Motors с NASA, получил звание первого гуманоидного робота в космосе и первого робота для работы с инструментами, созданными для людей, в космосе. В настоящее время он трудится на Международной космической станции (МКС).
Проект «Robonaut 2» нацелен на создание гуманоидной машины, способной на совместную работу с космонавтами, чтобы выполнять
трудные и опасные задачи по обслуживанию и ремонту техники в открытом космосе.
«R1», первый вариант «Робонавта», был прототипом, разработанным с целью исследовать, как гуманоидные роботы могли бы помочь астронавтам в открытом космосе. Его преемник «R2» оборудован полноценным роботизированным экзоскелетом, современной системой технического зрения, программным обеспечением для распознавания изображений, датчиками и алгоритмами управления, а также роботизированными руками. Он помогает в работе космонавтам, чтобы сэкономить их силы. Кроме того, «Робонавт» проходит в Хьюстоне подготовку к выполнению медицинских процедур, включая использование шприцев и проведение ультразвукового сканирования.
Он помогает в работе космонавтам, чтобы сэкономить их силы. Кроме того, «Робонавт» проходит в Хьюстоне подготовку к выполнению медицинских процедур, включая использование шприцев и проведение ультразвукового сканирования.
«Робонавт 2» покрыт мягким материалом и запрограммирован на остановку в случае касания человека, чтобы избежать его травмирования.
Первый промышленный робот
Первый промышленный робот был внедрен на производственной линии завода General Motors в 1961 году. «Юнимейт» представлял собой мощную роботизированную руку для установки литых металлических изделий и сварных компонентов на шасси автомобиля. Это был первый робот-манипулятор, который помог ускорить производственные линии на заводах по всему миру.
Первоначальная стоимость манипулятора «Юнимейт» составила 25 000 долларов. У робота было шесть программируемых осей движения, а конструкция позволяла работать с тяжелыми объектами на высокой скорости. Манипулятор весом 1,8 тонны оказался чрезвычайно универсальным и вскоре стал одним из самых популярных промышленных роботов в мире.
«Юнимейт» стал популярным и вне промышленного производства, приняв участие в «Вечернем шоу Джонни Карсона», в котором он разливал пиво и даже дирижировал оркестром.
Джордж Девол, первым разработавший промышленного программируемого робота в 1954 году, основал первую в мире компанию по производству роботов, Unimation. Роботы стали обычным явлением на современных сборочных линиях, так как их способность выполнять повторяющиеся задачи на высокой скорости превращает их в идеальные средства производства.
Первый беспилотный робот
Дроны, или беспилотные летательные аппараты (БПЛА), использовались в течение сотен лет. Первое задокументированное применение датируется 1849 годом, когда австрийская армия запустила аэростаты, оснащенные бомбами, в сторону осажденной Венеции. Военные исследования в XX столетии привели к появлению ряда технологических инноваций, включая систему глобального позиционирования (GPS) и Интернет.
Это привело к созданию первого полностью автономного беспилотного летательного аппарата в 1973 году. Израильский дрон Tadiran Mastiff был оборудован системой передачи данных, позволяющей в автоматическом режиме и реальном времени вести высококачественную видеосъемку места полета и транслировать ее оператору. Эти БПЛА предварительно программировались на траекторию полета и широко использовались армией обороны Израиля.
Израильский дрон Tadiran Mastiff был оборудован системой передачи данных, позволяющей в автоматическом режиме и реальном времени вести высококачественную видеосъемку места полета и транслировать ее оператору. Эти БПЛА предварительно программировались на траекторию полета и широко использовались армией обороны Израиля.
Современные военные беспилотники, такие как «Предатор» и «Таранис», играют ключевую роль на поле боя.
Поделиться ссылкой
виды промышленной робототехники в производстве – примеры применения
Содержание:
- Что представляет собой промышленная робототехника
- Что называют промышленными роботами
- Виды промышленных роботов
- Типы промышленных роботов по назначению
- Перспективы применения
- Основные преимущества использования промышленных роботов
- Производители промышленных роботов
- Fanuc
- Hanwha
- Kuka
- Universal Robots
- uFactory
- ABB
- Yaskawa
- Kawasaki
- Автомобильная промышленность
- Производство электроники
- Пищевая промышленность
- Сельское хозяйство
Автоматизация давно является неотъемлемой частью современного производства. Робототехника становится дешевле. В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
Робототехника становится дешевле. В частности, за последние десять лет цены на промышленные роботы понизились почти на 30%. А в следующее десятилетие прогнозируется спад цен на них еще на 20%. В 2020 году продажи производственных роботов увеличились на 15%. Соответственно, промышленные роботы активно приобретаются не только крупным, но и средним и малым бизнесом.
Каталог промышленных роботов
Что представляет собой промышленная робототехника
Это отрасль современного производства, которая занимается разработкой и производством промышленных роботов-манипуляторов и систем, направленных на автоматизацию производственных процессов и замену ручного труда механическим.
Первый промышленный робот Unimate был выпущен в Америке в 1954 году. Его изобрел основатель фирмы Unimation Джордж Девол. В 1961 году робот был запущен в массовое производство на предприятии General Motors. В 70-80-е годы 20 века робототехника продолжала развиваться дальше.
Что называют промышленными роботами
Промышленные роботы (ПР) представляют собой устройства, работающие по заданной программе и осуществляющие движение, перемещение и управление в рамках производственного процесса. Их назначение – выполнение определенных операций и/или перемещение предметов под контролем оператора или без его участия.
Их назначение – выполнение определенных операций и/или перемещение предметов под контролем оператора или без его участия.
Виды промышленных роботов
Специалисты выделяют три основных вида промышленных роботов.
- Автоматические.
- Программные роботы – работают на основе циклической программы, которая заранее вводится в блок памяти. Это самые простые и дешевые представители автоматических роботизированных устройств.
- Адаптивные – благодаря встроенной системе датчиков и сенсоров могут переключать программу с учетом изменения внешних условий.
- Обучаемые – управляющая программа корректируется в зависимости от хода технологического процесса. Затем робот функционирует с учетом внесенных изменений.
- Интеллектуальные – последнее поколение устройств. Они имеют элементы искусственного интеллекта, поэтому могут сами анализировать окружающую среду и действовать с учетом полученных сведений.

- Манипуляторы или командные роботы. Управляются оператором дистанционно.
- Копирующие. Повторяют действия оператора.
- Полуавтоматические. Оператор задает движение основному органу, работа сочленений согласуется и корректируется системой управления.
- Автоматизированные. Автоматический режим работы чередуется с работой оператора.
- Супервизорные. Автоматически выполняют заданный цикл, но переход от одного этапа работы к другому осуществляется через команды оператора.
- Диалоговые. Работая в автоматическом режиме, в то же время взаимодействуют с оператором с помощью специального языка (например, голосовые команды).
По грузоподъемности:
- Легкие – до 10 кг.
- Средние – 11-200 кг.
- Тяжелые – 200 кг – 1 т.
- Сверхтяжелые – более 1 т.
По маневренности:
- Стационарные.
- Подвижные.
По способу установки:
- Встроенные.
- Подвесные.
- Напольные.
Промышленного робота выбирают в зависимости от условий его эксплуатации и от задач, которые ставит перед собой производитель.
Типы промышленных роботов по назначению
По назначению роботы условно делятся на несколько категорий.
Универсальные, то есть выполняющие различные виды операций.
Специальные. Они работают даже в неблагоприятных условиях или имеют особые функции.
Специализированные. Такие роботы предназначены для осуществления какого-либо одного вида деятельности: сборка, резка, сварка, покраска, паллетирование и пр. Рассмотрим некоторые из них.
- Роботы для паллетирования. Они используются для погрузочно-разгрузочных работ и укладки изделий в паллеты по определенным схемам. Это, например, роботы Fanuc серии M410 (работа со средними и тяжелыми грузами). Сюда же можно отнести KUKA KR QUANTEC PA Arctic – паллетоукладчик, работающий даже при минус 30 градусах.
- Роботы для сварки. К примеру, аппараты серии FANUC Arc Mate умеют паять и выполнять все виды сварки.
- Роботы для покраски. Они оснащаются распыляющими устройствами и успешно работают с лакокрасочными покрытиями разных типов (FANUC Paint).

Роботы-манипуляторы.
- Традиционные. Это своеобразные робо-руки, работающие на сервоприводах. Движения ограничиваются размерами самой руки и инструмента, который закрепляется на ней. Они поворачиваются и совершают сложные движения по разнообразным траекториям. К ним относятся пневмоприсоски, захваты, распылители краски, роботы для 3D-печати, сварки.
- Дельта-роботы. Совершают быстрые и точные движения, поэтому служат для выполнения фасовочных и монтажных работ в фармацевтике, электронной и пищевой промышленности.
- Роботы типа SCARA. Их особенность: высокая точность и повторяемость, наряду с меньшей областью работы и степенью свободы. Соответственно, используются в производствах, где важна точность, а не большая зона доступа (комплектация изделий и пр. ).
 ).
).Роботы для обслуживания станков. Их основные функции – выемка деталей из станков с ЧПУ, загрузка материала, техническое обслуживание: замена инструментов, смазка. Могут обслуживать несколько станков.
Коллаборативные роботы (коботы). Работают вместе с людьми, и полностью безопасны для них. Легко настраиваются на разные виды работ, их можно быстро обучить выполнять новые задачи. На данный момент считаются лучшими промышленными роботами.
Каталог коллаборативных роботов
Перспективы применения
Как было сказано выше, робототехника становится все более и более дешевой и доступной, поскольку:
- Один робот заменяет несколько десятков человек.
- Он вырабатывает больше продукции.
- Окупает себя примерно за 12-15 лет.
Развитие этой отрасли идет по пути разработки искусственного интеллекта. Наиболее перспективные отрасли развития робототехники в России – это:
- Строительство.
- Обрабатывающая промышленность.
- Горнодобывающая промышленность.
- Сельское хозяйство.

Основные преимущества использования промышленных роботов
Эти устройства уже доказали свою эффективность. Благодаря им:
- Снижаются затраты, в том числе и на рабочую силу.
- Повышается точность изготовления.
- Уменьшается количество брака.
- Ускоряются производственные процессы.
- Экономится материал и электроэнергия.
- Снижается стоимость обработки.
- Ускоряется процесс перехода на другой проект.
Производители промышленных роботов
При покупке промышленного робота имеет смысл поинтересоваться его производителем. Можно выделить несколько компаний, известных во всем мире.
Fanuc
Каталог роботов Fanuc
Японская компания Fanuc – мировой лидер по производству промышленных роботов. По данным на 2018 год по всему миру было установлено 400 000 роботов производства Fanuc.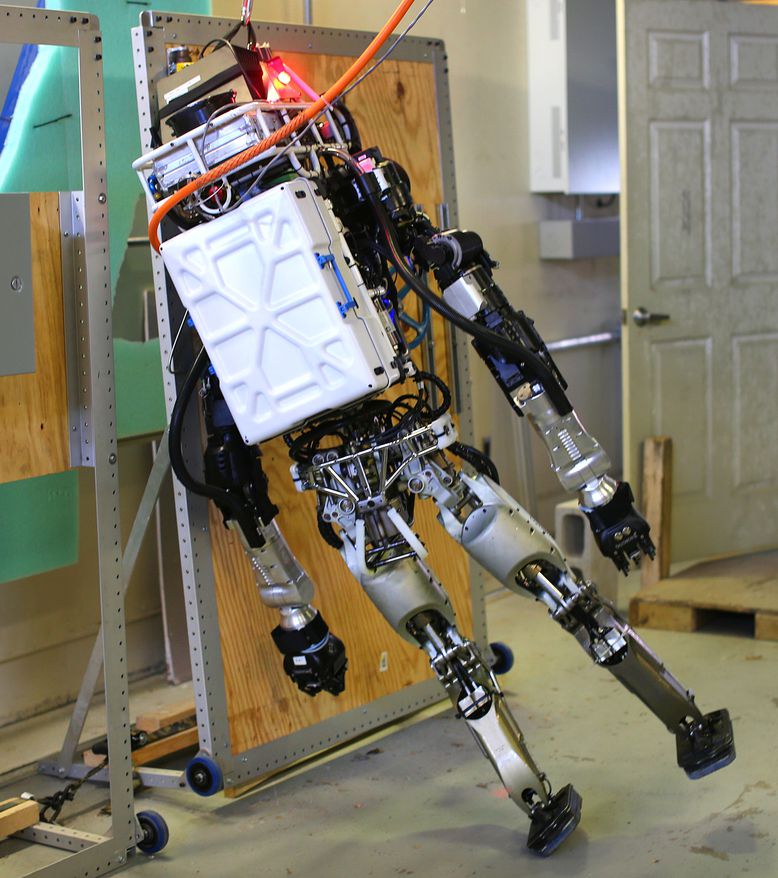 В ассортимент входят различные типа устройств: роботы для сварки, покраски, паллетирования, дельта-роботы.
В ассортимент входят различные типа устройств: роботы для сварки, покраски, паллетирования, дельта-роботы.
В частности, разработанная компанией модель FANUC M-1iA отлично подходит для предприятий, занимающихся небольшими электронными устройствами. Ее основные характеристики: высокая точность, небольшая грузоподъемность, повышенная производительность, быстрая сборка деталей.
Hanwha
Hanwha – известный производитель коллаборативных роботов. Продукция этой южнокорейской фирмы используется в Азии, Европе и США. Кобаты (коллаборативные роботы) становятся все популярнее, т.к. они дешевле в обслуживании и просты в управлении.
Наибольшим спросом пользуется Hanwha HCR-5 cobot. Он применяется для изготовления электронных устройств, при обработке пластика, в пищевой, автомобильной и фармацевтической промышленности.
Kuka
Kuka выпускает промышленных роботов, выполняющих многосерийные задачи: паллетирование, погрузку, упаковку, сварку, сборку, обработку.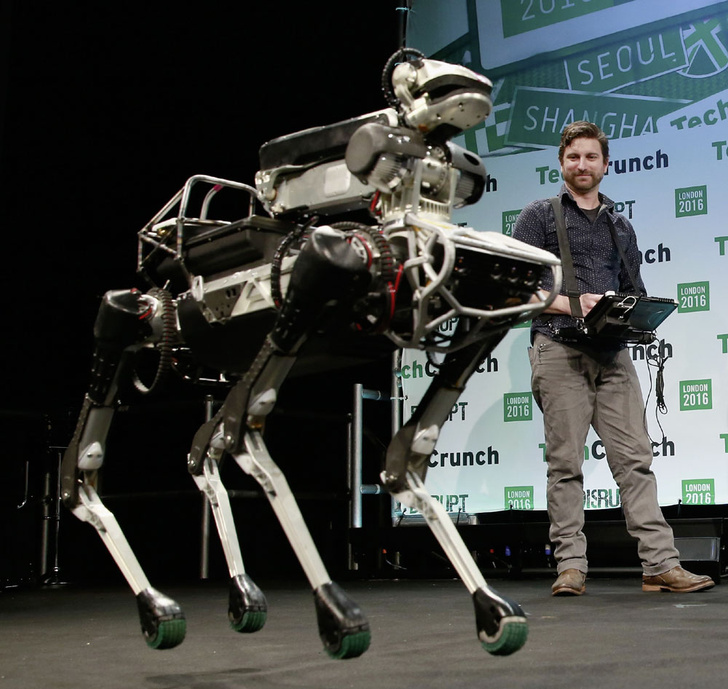 Более 80 тыс. роботов от этого производителя установлены по всему миру.
Более 80 тыс. роботов от этого производителя установлены по всему миру.
Например, роботы Kuka, выполняющие автоматическую дуговую сварку, используются на заводе Gestamp в Билефельде при производстве рам лестничного типа для автомобилей Volkswagen. Они обеспечивают надежность и высокую производительность.
Universal Robots
Universal Robots основана в 2005 году. Она производит гибких коллаборативных роботов небольшого размера. Первая модель — UR5 – была выпущена в 2008 году. Кобаты Universal Robots используются при сборке, паллетизации, упаковке, покраске, литье, сварке. Они совместимы со станками с ЧПУ.
К примеру, модель UR 10 со средней грузоподъемностью применяется при сварке, склейке, пайке деталей, совмещается с фармацевтическим, сельскохозяйственным и технологическим оборудованием. Может размещаться на столе.
uFactory
uFactory – китайский производитель, специализирующийся на выпуске настольных роботов для малого бизнеса и обучения.
Одна из последних разработок компании — uArm Swift Pro. Эта роботизированная рука предназначена для бытовых целей, в частности, для 3D-печати. На нее можно установить лазерный гравер, головки для печати, различные захваты. При необходимости аппарат легко перевести в обучающий режим.
ABB
ABB – швейцарская фирма, которая выпустила на сегодняшний день более 160 тысяч роботов. Они используются в пищевых и мебельных производствах, в фармакологии, электронике и пр.
Фирма АВВ – пионер на рынке робототехники. Именно она 40 лет назад произвела первого в мире электрического промышленного робота и первого в мире робота для покраски.
В России задействованы около 1,5 тыс. роботов этой фирмы. Например, они осуществляют контроль качества на предприятиях компании Novo Nordisk (Калужская область), автоматизируют производственные процессы завода «МолПродукт» (Московская область) и т.д.
Yaskawa
Эта одна из старейших японских фирм основана в 1915 году. В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 1977 году произвела первую серию собственных промышленных роботов MOTOMAN-L10. Они предназначены для покраски, сварки, резки, упаковки, сборки.
В 2007 компанией Yaskawa разработан самый быстрый робот для дуговой сварки — МОТОМАN SSA2000.
Kawasaki
Компания работает на рынке робототехники с 1969 года. Она специализируется на выпуске роботов для покраски, паллетирования, сварки. Высоко ценятся среди покупателей роботы для чистых помещений, двурукие, шарнирные. Они также подходят для работы в сложных условиях (агрессивные среды, высокие температуры).
Проблемы промышленных роботов и их решение
Основные проблемы среднего и малого бизнеса, ведущие к отказу от использования промышленных роботов:
- небольшой объем заказов;
- отсутствие узких специалистов, владеющих навыками программирования, или повышенная оплата за их труд;
- невозможность автоматизации каких-либо задач из-за отсутствия крупных серий;
- нехватка места в цеху или другом помещении.
Все эти вопросы легко решаются при помощи роботов нового поколения – коботов. Они:
- Могут работать с мелкими сериями или даже производить единичную продукцию.
- Имеют открытую архитектуру – это значительно увеличивает их потенциал.
- Быстро переключаются между операциями.
- Легко перенастраиваются на другие задачи.
- Безопасны, т.к. оснащены специальными датчиками, которые предотвращают столкновение с человеком.
- Не требуют много места или специального ограждения.
Применение промышленных роботов в различных отраслях промышленности
Промышленные роботы особенно активно применяются в тех отраслях промышленности, где необходима точность и быстрота действий. Они успешно заменяют людей при выполнении опасных или монотонных операций или при работе в агрессивных средах.
Автомобильная промышленность
На сегодняшний день это лидер по внедрению робототехники в производственные процессы. Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Например, венгерская компания AUDI Hungary выпускает автомобили, используя роботы Fanuc. Роботы для лазерной и плазменной резки задействованы на заводах Renault во Франции.
Производство электроники
Компания ALNEA Sp. z.o.o. – известный производитель тестовых приборов – применяет KUKA KR 6 R900 для пайки печатных плат. В результате время выполнения заказов уменьшается в два раза.
Ряд предприятий использует шестиосевой робот-манипулятор Yaskawa Motoman Mh22 для сборки компьютерных жестких дисков.
Пищевая промышленность
Atria Scandinavia – шведская компания, которая выпускает вегетарианские продукты. Упаковкой, маркировкой и укладкой занимаются манипуляторы UR 10. Они обрабатывают более 200 позиций в час на каждой линии производства.
Сельское хозяйство
Некоторые роботы могут собирать урожай. Например, Agrobot SW6010 использует сенсоры и манипуляторы для обнаружения и сбора спелой клубники. В систему «Vegebot», которая предназначена для сбора салата, входит робот-манипулятор UR10 с шестью степенями свободы.
Заключение
В наше время между понятием «конкурентоспособность» и понятием «автоматизация» нередко ставится знак равенства. Современные роботы рентабельны даже для небольших организаций, поскольку улучшают условия труда, повышают производительность и качество выпускаемой продукции. Затраты на них быстро окупаются.
Таким образом, промышленные роботы с легкостью внедряются в любые производственные процессы, следовательно, их разработка и внедрение значительно расширяют возможности и перспективы робототехники.
Приобрести Робот манипулятор и задать свой вопрос, или сделать предложение, вы можете, связавшись с нами:
- По телефону: 8(800)775-86-69
- Электронной почте:[email protected]
- Или на нашем сайте: https://3dtool.ru/
Не забывайте подписываться на наш YouTube канал :
Вступайте в наши группы в соц.сетях:
ВКонтакте
Компания iRobot
Основанная в 1990 году в Массачусетском Технологическом институте робототехники (MIT) с целью реализовать идею создания роботов – помощников, компания iRobot к настоящему моменту продала более 30 миллионов роботов по всему миру. Компания обладает богатой историей создания инновационных технологий и разработала некоторые из наиболее важных роботов, используемых в мире. Эти роботы раскрыли тайны Великой Пирамиды в Гизе, нашли вредоносный разлив нефти в Мексиканском заливе и спасли тысячи жизней в зонах конфликтов и кризисов по всему земному шару.Компания iRobot создала первых роботов Micro Rover, используемых NASA, которые навсегда изменили перемещения в космосе, построила первых наземных роботов, используемых вооруженными силами США в конфликтах, представила первого робота удаленного присутствия с самостоятельной навигацией, получившего одобрение от FDA, для госпиталей и первый робот для дома Roomba, сформировав новую категорию продуктов для уборки дома. Являясь лидером в индустрии роботостроения уже более 30 лет, iRobot продолжает строить роботов, которые позволяют проводить уборку более умным способом и освободить время на повседневные дела.
Компания обладает богатой историей создания инновационных технологий и разработала некоторые из наиболее важных роботов, используемых в мире. Эти роботы раскрыли тайны Великой Пирамиды в Гизе, нашли вредоносный разлив нефти в Мексиканском заливе и спасли тысячи жизней в зонах конфликтов и кризисов по всему земному шару.Компания iRobot создала первых роботов Micro Rover, используемых NASA, которые навсегда изменили перемещения в космосе, построила первых наземных роботов, используемых вооруженными силами США в конфликтах, представила первого робота удаленного присутствия с самостоятельной навигацией, получившего одобрение от FDA, для госпиталей и первый робот для дома Roomba, сформировав новую категорию продуктов для уборки дома. Являясь лидером в индустрии роботостроения уже более 30 лет, iRobot продолжает строить роботов, которые позволяют проводить уборку более умным способом и освободить время на повседневные дела.
2020
iRobot отмечает 30 лет возможности делать больше с помощью роботов.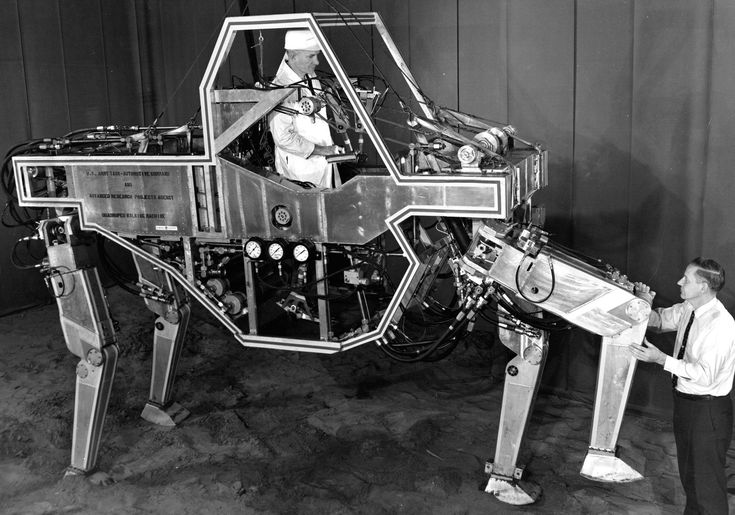 Более 30 миллионов роботов продано по всему миру.
Более 30 миллионов роботов продано по всему миру.
2019
iRobot запускает Roomba® s9+ с самоочищающейся базой, свой самый продвинутый робот на настоящий момент.
iRobot запускает Brave jet® m6, робот для влажной уборки, способный устранить липкие загрязнения в нескольких комнатах и на больших пространствах.
iRobot добавляет робота Root ® для кодировки в свою линейку продуктов.
2018
iRobot запускает Roomba® i7+ с самоочищающейся базой, робот, который самостоятельно опустошает мусоросборный контейнер и изучает план помещения.
iRobot запускает робот — пылесос Roomba® e5
2017
iRobot представляет Roomba® 690 и 890 с функцией соединения по wi-fi.
iRobot покупает компанию Sales on Demand Corporation (SODC), и открывает новые офисы iRobot в Японии.
iRobot покупает компанию Robopolis, своего крупнейшего дистрибьютора в Европе. Более 20 миллионов роботов продано по всему миру.
2016
iRobot расширяет мировое присутствие в Китае открывая новый офис в Шанхае.
iRobot выпускает робота для влажной уборки Braava jet® , идеально подходящий для мытья полов в кухнях, ванных комнатах и иных малых помещениях.
2015
iRobot выпустил робот — пылесос Roomba® 980 с интеллектуальной системой визуальной навигации, и управлением через приложение с облачным подключением, а также режимом повышенной мощности на ковровых покрытиях.
2014
iRobot представил робот полотер Scooba® 450
2013
iRobot запустил Roomba 800 серии с революционной системой эффективной чистки AeroForce®.
iRobot запустил робота для совместной работы по видео AvaTM 500
iRobot запустил робота для чистки бассейнов MirraTM 530
Более чем 10 миллионов роботов для домашней уборки продано в мире
2012
iRobot выкупает компанию Evolution Robotics
Более чем 5000 роботов, обеспечивающих безопасность, продано по миру
2011
iRobot разрабатывает мини-робота 110 FirstLook®
iRobot выпускает робот для мытья полов Scooba 230
iRobot выпускает робот пылесос Roomba 700 серии
2010
iRobot празднует двадцатилетие
iRobot софинансирует National Robotics Week
iRobot помогает в мониторинге разлива нефти в Мексиканском заливе
2009
iRobot запускает образовательный проект SPARK
2008
iRobot начинает производить роботов, работающих в воде
iRobot запускает серию пылесосов Roomba® для владельцев домашних животных, а также линейку профессиональных роботов – пылесосов.
iRobot выигрывает контракт на разработку робота для коммуникации LANdroid
2007
iRobot запускает Create® — программируемых мобильных роботов.
iRobot запускает Verro® — робота для уборки бассейнов.
iRobot запускает Looj® — робота для чистки водостоков
2006
iRobot запускает робота – швабру для магазинов DirtDog®
2005
iRobot запускает Scooba – робота для мытья полов
iRobot выходит на биржу NASDAQ
2004
iRobot выигрывает контракт на разработку робота-беспилотника, перемещающегося по земле.
2002
iRobot запускает Roomba – робота пылесоса
iRobot PackBot® взят на вооружение войсками США
iRobot и National Geographic society разработали робота для поиска пирамид в Египте.
2001
Робот iRobot PackBot® занимается поисками в World trade center после терракта 11 Сентября
1998
iRobot выигрывает контракт DAPRA на постройку мобильного тактического робота, что привело к разработке робота PackBot®.
История советской робототехники. История России.
С древних времён человек мечтал о создании искусственного человека, обладающего разумом и способного выполнять какие-либо действия. Так, в еврейской мифологии существует легенда о големе – глиняном человеке, которого оживили при помощи магии. В средние века ученые достигли высот, создавая сложные механизмы, но научить их мыслить так и не удалось. Самым удачным можно считать изобретение швейцарского часовщика Пьера-Жака Дро и его сына Анри Дро, живших во второй половине XVIII-го века – механический человек «Писец». Он умел выписывать буквы и слова, сидя за столом и плавно покачивая головой в такт движениям. От имени Анри Дро и произошло название «андроид»[1].
А вот слово «робот», напротив, славянского происхождения. Его придумал чешский писатель Карел Чапек, который описал в своей социально-фантастической пьесе «R. U.R.» «механических людей» в 1920 году. Оно образовалось от слова «робота» – работа по-чешски. А в 1942 году писатель-фантаст Айзек Азимов впервые употребил термин «робототехника», а также вывел 3 закона для роботов. Так, робот должен выполнять приказы человека, не причинять ему вред и уметь защищать себя.
U.R.» «механических людей» в 1920 году. Оно образовалось от слова «робота» – работа по-чешски. А в 1942 году писатель-фантаст Айзек Азимов впервые употребил термин «робототехника», а также вывел 3 закона для роботов. Так, робот должен выполнять приказы человека, не причинять ему вред и уметь защищать себя.
Современная робототехника возникла во второй половине ХХ-го века, когда значительно возросла потребность в автоматизации производственных процессов. Современное определение робота обозначает его как универсальный автомат для осуществления действий, имитирующих действия человека.
Существует несколько направлений развития робототехники. Военные роботы используются для помощи военнослужащим в военных операциях. К ним относятся роботы-сапёры и спасатели, роботы-разведчики – беспилотные летательные аппараты и другие. Космические роботы отлично справляются с работой за пределами Земли – это зонды, луноходы, марсоходы и другие. Бытовые роботы помогают человеку в повседневной жизни, например, робот-пылесос.
Промышленные роботы представляют собой систему манипуляторов, управляемых при помощи специальных программ. Эти роботы предназначены для выполнения операций, связанных с перемещениями предметов, и используются в научных лабораториях и на промышленных производствах, чаще всего для покраски и как сварщики. В настоящее время в производственных процессах роботов используют для работы в смертельно опасных и агрессивных средах, при выполнении тяжёлых примитивных операций и в технологических процессах с тяжёлыми условиями труда, где шум, вибрация или высокая температура вызывают профессиональные болезни рабочих и быструю усталость [11].
Прогресс в робототехнике движется прежде всего в сторону совершенствования систем управления. Первое поколение промышленных роботов имело программное управление, основанное на станках с числовым программным управлением (ЧПУ). В роботах второго поколения использовалось адаптивное управление. Это очувствленные роботы – то есть они снабжены сенсорными системами, среди которых главной является система технического зрения (СТЗ). Доля этих роботов в общем количестве в 1980-х годах составляла около 50%, несмотря на то, что они в несколько раз дороже роботов с программным управлением и значительно сложнее в обслуживании. Однако затраты окупаются большими функциональными возможностями подобных роботов. К третьему поколению роботов относятся роботы с интеллектуальным управлением, пока они ещё находятся в стадии разработки и исследований [16].
Доля этих роботов в общем количестве в 1980-х годах составляла около 50%, несмотря на то, что они в несколько раз дороже роботов с программным управлением и значительно сложнее в обслуживании. Однако затраты окупаются большими функциональными возможностями подобных роботов. К третьему поколению роботов относятся роботы с интеллектуальным управлением, пока они ещё находятся в стадии разработки и исследований [16].
Хронология развития робототехники
История робототехники неразрывно связана с историей развития ЭВМ. Чёткого и однозначного определения, что такое «робот» не существует, поэтому сложно определиться с датой, когда же в СССР был создан первый робот.
Известно, что в 1936 году 16–летний советский школьник Вадим Мацкевич создал «робота», который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками.
На «робота» Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.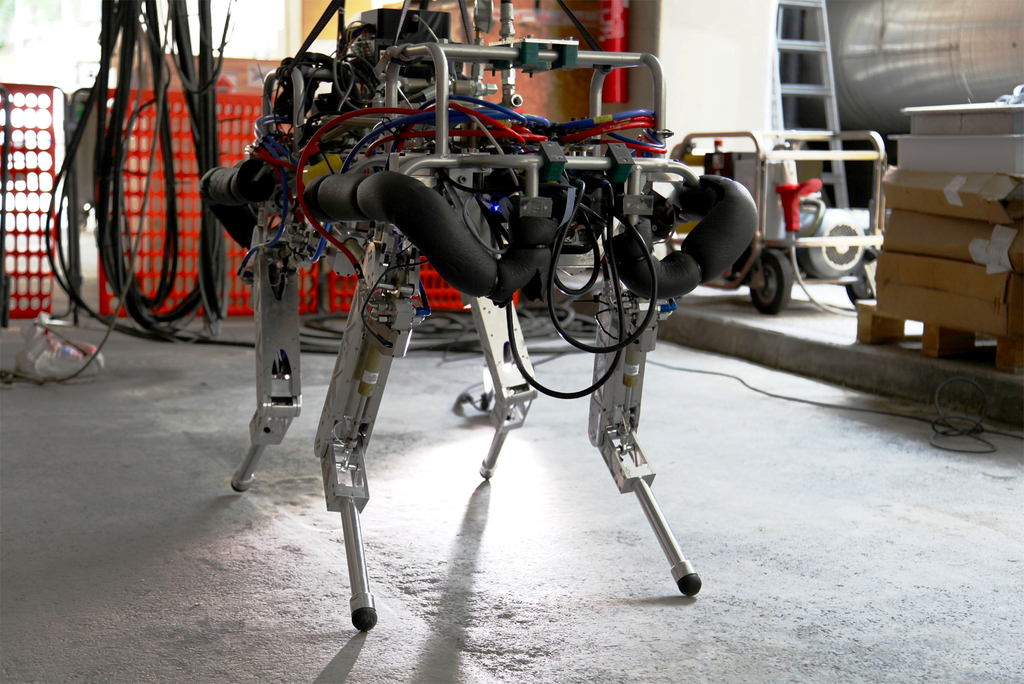 «Робот» имел небольшую особенность: мотор был слабоват, и прямая рука поднималась лишь чуть выше плеча. Немцы тут же увидели в этом жесте приветствие «Зиг хайль!» и бегали в советский павильон фотографироваться с «политическим» роботом. Мальчику пришлось отвечать за своё детище перед сотрудниками НКВД, но, к счастью, ему удалось избежать наказания со стороны органов. Мацкевич получил диплом выставки, о чём написали все советские газеты.
«Робот» имел небольшую особенность: мотор был слабоват, и прямая рука поднималась лишь чуть выше плеча. Немцы тут же увидели в этом жесте приветствие «Зиг хайль!» и бегали в советский павильон фотографироваться с «политическим» роботом. Мальчику пришлось отвечать за своё детище перед сотрудниками НКВД, но, к счастью, ему удалось избежать наказания со стороны органов. Мацкевич получил диплом выставки, о чём написали все советские газеты.
Творение Мацкевича могло только поднимать руку, не выполняло никаких полезных действий и не обладало искусственным интеллектом, однако выглядело похожим на человека — так, как должен выглядеть классический робот в представлении широких масс — об этом говорит и то, что Мацкевич получил диплом на парижской выставке.
«Робот» Вадима Мацкевича, выставлявшийся на всемирной выставке в Париже
После школы Вадим Мацкевич окончил сначала Московский энергетический институт, потом Ленинградскую военно-воздушную академию. Во время Отечественной войны Мацкевич служил лётчиком-испытателем.
Во время Отечественной войны Мацкевич служил лётчиком-испытателем.
В 1950 году вспыхнула война между Северной и Южной Кореей. СССР вступились за северян, в то время как США приняли сторону южан. В начальные периоды войны американцы побеждали благодаря новым истребителям «Сэйбр». Они могли сбить цель, находясь от неё за два километра, тогда как остальные самолёты стреляли лишь в пределах двухсот метров. Но однажды удалось перехватить подбитый «Сэйбр», который тут же отправился в Москву для исследования. Мицкевич разобрался в «хитром» электронном прицеле американцев, и создал радиолокационную станцию «Сирена». Улавливая частоту сигналов истребителя за 10 км, «Сирена» предупреждала пилота о том, что он находится под прицелом. Когда первые испытания прошли успешно, Сталин приказал оборудовать РЛС все самолёты.
В 1948 году Сергей Лебедев закончил разработку первой отечественной ЭВМ [3], а в 1950 году в СССР вступила в действие первая вычислительная электронная цифровая машина МЭСМ, самая быстродействующая в Европе. Ещё через год вышел приказ о создании автоматических систем управления военной техникой, а в МВТУ им. Баумана создали кафедру специальной робототехники и мехатроники. В 1958 году создана первая в мире полупроводниковая АВМ (Аналоговая Вычислительная Машина) МН-10, которая имела большой успех на выставке в Нью-Йорке в 1959 году. В том же году советский кибернетик Виктор Глушков высказал идею «мозгоподобных» структур ЭВМ, которые объединят миллиарды процессорных элементов, так что произойдёт слияние памяти с обработкой данных [4].
Ещё через год вышел приказ о создании автоматических систем управления военной техникой, а в МВТУ им. Баумана создали кафедру специальной робототехники и мехатроники. В 1958 году создана первая в мире полупроводниковая АВМ (Аналоговая Вычислительная Машина) МН-10, которая имела большой успех на выставке в Нью-Йорке в 1959 году. В том же году советский кибернетик Виктор Глушков высказал идею «мозгоподобных» структур ЭВМ, которые объединят миллиарды процессорных элементов, так что произойдёт слияние памяти с обработкой данных [4].
В это время в США в 1954 году создал первого промышленного программируемого робота и ввёл термин Universal Automation. Впоследствии он немного сократил его и назвал свою компанию Unimation. В Массачусетском технологическом институте родилась идея создания очувствленного робота. Аспирант института Г. Эрнст разработал очувствленную руку-манипулятор под управлением компьютера. Она собирала кубики, разбросанные по столу, и складывала их в ящик. В том же институте в 1958 году создан один из первых языков программирования – LISP.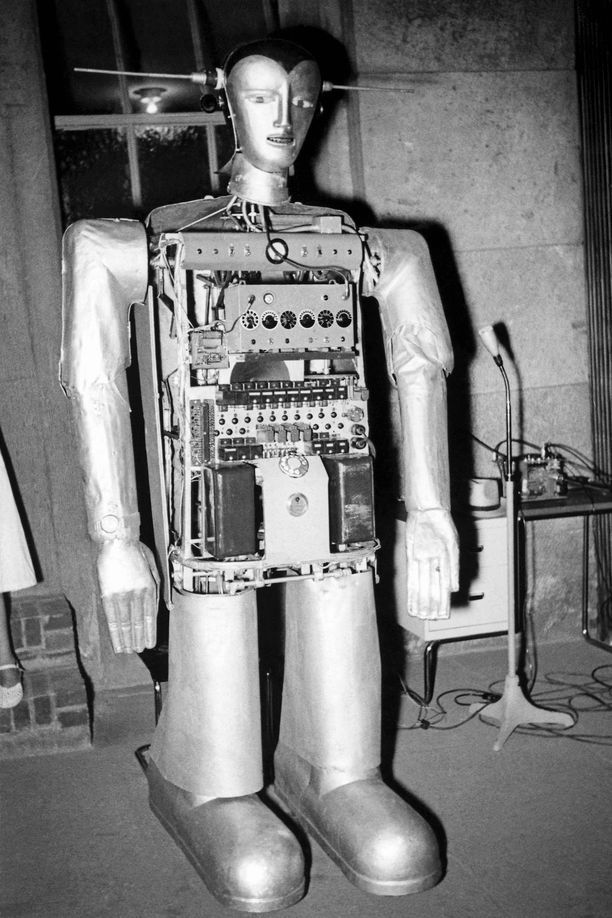
1960-е годы характеризуются бурным расцветом всей техники в целом. В 1960 году в США разработали первый робот «Versatran», предназначенный для промышленного применения. В 1961 году Гагарин осуществил первый полёт человека в космос, была запущена на траекторию полёта к Венере советская автоматическая межпланетная станция «Венера-1». В 1962 году фирма Unimation внедряет первые промышленные роботы-манипуляторы на заводах General Motors. Механические руки использовались при сборке автомобилей, перемещали 40-килограммовые детали.
В 1963 году впервые в мировой истории сотрудники кафедры робототехники МВТУ им. Баумана создали манипулятор для размещения на внешней поверхности аппаратов типа «Восток». Управление манипулятором происходило с помощью специальных устройств управления, которые имитировали перемещение в пространстве человеческой руки. Сложность состояла в том, чтобы исключить возможное влияние на работу манипулятора внешних обстоятельств.
В 1965 году на ЭВМ серии «Мир» применили аппаратную реализацию языков, что позволило проводить аналитические преобразования, в том числе дифференцирование и интегрирование формул.
В 1966 году советская автоматическая станция «Луна-9», совершив посадку на поверхности спутника Земли, начала первую в истории радиотрансляцию с поверхности Земли. Автоматическая станция «Венера-3» достигла поверхности Венеры и оставила там вымпел СССР. Так впервые автоматический аппарат перелетел с Земли на другую планету.
В то же время в СССР разработали революционную модель ЭВМ второго поколения – БЭСМ-6, в которой впервые появился прообраз современной кэш-памяти. Академик В. Глушков завершил разработку проекта большой ЭВМ «Украина», идеи устройства которой позднее были использованы в больших американских ЭВМ 1970-х годов [5].
В 1968 году при Ленинградском политехническом институте было создано Особое конструкторское бюро технической кибернетики, а главным конструктором назначен Е. И. Юревич. В первые годы ОКБ ТК занималось разработкой манипуляторов для подводных аппаратов, а также систем управления мягкой посадкой космических кораблей «Союз» [6]. Также совместно с Институтом океанологии Академии наук СССР в Ленинградском политехническом институте разработали подводный робот «Манта» с очувствленным устройством захвата, телеуправляемый от ЭВМ [16].
В Японии в это время начинается выпуск промышленных роботов по лицензии компании Unimation.
В 1969 году в рамках первого этапа работ по созданию системы предупреждения о ракетном нападении была создана компьютерная сеть с каналами передачи данных [5].
В СССР приступили к разработке промышленного робота «Универсал-5» [19].
Универсал-5
В 1970-х годах ОКБ ТК были созданы системы управления мягкой посадкой «Квант» для межпланетной станции «Луна-16», системы автоматизированного управления манипуляторами, разработаны приборы контроля бортовых систем для орбитальных космических аппаратов «Союз» и «Салют». Разработаны системы автоматизированного управления манипулятором для изделия Катран-2 и создано ультразвуковое очувствление схвата подводного манипулятора. Проведены испытания первого импульсного рентгеновского высотомера «Факел». В 1972 году Е. Юревича назначили главным конструктором по созданию промышленных роботов в СССР, и уже в следующем году были введены в эксплуатацию первые в стране подвижные промышленные роботы МП-1 и «Спрут-1» [7].
Спрут-1
Вслед за «Луной-16» к спутнику Земли вскоре отправилась автоматическая межпланетная станция «Луна-17», на борту которой находился самоходный аппарат Луноход-1. 17 ноября 1970 года он совершил посадку в районе Моря дождей и приступил к выполнению программы исследований. Управление исследовательским аппаратом осуществлялось при помощи комплекса аппаратуры на базе ЭВМ «Минск-22».
В 1971 году в СССР робототехнику официально признали как новое научное направление. В МВТУ академик Евгений Попов возглавил кафедру специальной робототехники и мехатроники, а также создал целую научную школу. В американской компании Intel создан первый микропроцессор.
В Ленинградском политехническом институте создан экспериментальная модель интегрального робота, который был снабжён развитой системой очувствления, включающей техническое зрение и речевое управление [16].
Аппарат советской автоматической межпланетной станции «Марс-3» совершил посадку на поверхность Марса и начал передачу видеоданных на Землю. Он доставил на поверхность планеты микромарсоход М-71 с лыжно-шагающим принципом движения, но через 20 секунд связь со станцией оборвалась.
Он доставил на поверхность планеты микромарсоход М-71 с лыжно-шагающим принципом движения, но через 20 секунд связь со станцией оборвалась.
С 1972 года разработка роботов приняла плановый характер. Постановление Госкомитета СССР по науке и технике определило создание и применение роботов в машиностроении как задачу государственной важности и были сформулированы основные направления решения. В Институте Кибернетики под руководством Николая Михайловича Амосова создан автономный транспортный робот «Таир» с сетевой системой управления. «Таир» мог целенаправленно двигаться в естественной среде, при этом объезжая препятствия и поддерживая внутренние параметры в заданных пределах. Для передвижения робот использовал тактильные датчики, оптический дальномер, датчики состояния собственных подсистем и другие вспомогательные устройства. Для его управления была разработана нейроноподобная сеть, разделённая на шесть сфер: элементарных действий, распознавания и оценки ситуаций, решений, маневров верхнего и нижнего уровней [8].
транспортный робот «Таир»
В 1973 году в ОКБ ТК при Ленинградском политехническом институте созданы и введены в эксплуатацию первые в стране подвижные промышленные роботы МП-1 и «Спрут».
В 1974 году провели первый чемпионат мира по шахматам среди компьютеров. Титул первого компьютерного чемпиона завоевала советская программа «Каисса». Постановлением Совета Министров СССР ОКБ ТК назначено главной организацией в СССР по разработке промышленных роботов для машиностроения.
В 1975 году в СССР были запущены автоматические межпланетные станции «Венера-9» и «Венера-10». Совершив посадку на Венере, они передали информацию о поверхности планеты через орбитальные отсеки на Землю. Это стало первой удачной попыткой ретрансляции такого сложного сигнала автоматическими системами.
В соответствии с постановлением Госкомитета СССР по науке и технике созданы первые 30 серийных промышленных роботов для обслуживания прессов, станков, для точечной сварки, которые управлялись стационарными и подвижными пневмо-, гидро- и электроприводами [16].
В Ленинграде разработаны система магнитной навигации «Кедр», «Инвариант» и «Скат» для космических кораблей, самолётов и подводных лодок.
В это время в США в 1976 году Стив Джобс вместе с другом создают персональный компьютер Apple 1, с которого началась компьютерная революция.
В 1977 году В. Бурцев создал первый симметричный многопроцессорный вычислительный комплекс (МВК) «Эльбрус-1», и Советский Союз начал уверенно лидировать в строительстве суперкомпьютеров. Для межпланетных исследований был создан интегральный робот «Кентавр», который управлялся вычислительным комплексом М-6000. Его навигационная система состояла из гироскопа и системы счисления пути с одометром, а информация об окружающей среде поступала от лазерного сканирующего измерителя расстояний и тактильной системы, построенной на микровыключателях и упругих чувствительных элементах.
В 1979 году начат выпуск высокопроизводительных многопроцессорных УВК с перестраиваемой структурой ПС 2000, где производилось распараллеливание на уровне задач, ветвей, векторных и скалярных операций. Благодаря технологии распараллеливания задач разработки систем искусственного интеллекта вышли на новый этап [9].
Благодаря технологии распараллеливания задач разработки систем искусственного интеллекта вышли на новый этап [9].
В Институте Кибернетики под руководством Н. Амосова создан робот «Малыш», который также как и «Таир» управлялся обучающейся нейронной сетью. Он был сконструирован в виде шестиколёсной тележки, на которой размещались магнитный компас, оптический дальномер и контактные датчики. С МАЛЫШом был проведён целый ряд фундаментальных исследований и выявлены преимущества нейронносетевой системы управления перед традиционными алгоритмическими [8].
В пятилетку 1975-1980 было создано более ста промышленных роботов, организовано серийное производство 40 моделей. Также началась работа по стандартизации промышленных роботов в соответствии с программой Госстандарта СССР [16].
В 1980 году в СССР появился первый пневматический промышленный робот с позиционным управлением и техническим зрением МП-8. Он был разработан в ОКБ ТК Ленинградского политехнического института, в котором вскоре был создан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК).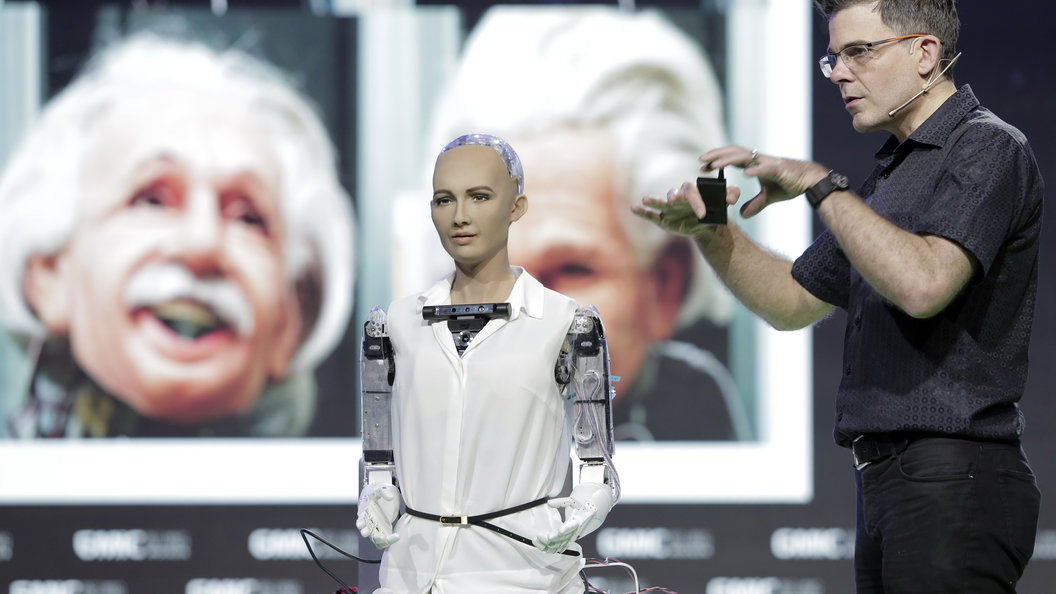 К концу 1980 года количество промышленных роботов в стране превысило 6000 штук, что составляло более 20% от мирового числа [16].
К концу 1980 года количество промышленных роботов в стране превысило 6000 штук, что составляло более 20% от мирового числа [16].
В 1981 в ЛПИ создали системы «Клён», «Маркер» и «Призыв» для спасения информации с терпящих бедствие летательных аппаратов и маркировки мест аварии [7].
Также в МВТУ им. Баумана открылся Научно-учебный центр «Робототехника», который объединил все московские вузы и институты Академии Наук, занимавшиеся робототехникой. В этом центре разработали модель самого массового промышленного робота МП-9С, серийное производство которого началось в 1982 году на АвтоВАЗе. В 1983 году на базе МВТУ им. Баумана по заказу КГБ для подразделений по борьбе с терроризмом создан мобильный робот, работающий со взрывоопасными предметами. Продолжила это направление разработка робототехнического комплекса МРК20 для работы с неразорвавшимися боеприпасами.
В США в 1982 году поступил в продажу персональный робот HERO-1. Роботы этой серии были плохо приспособлены к выполнению практических заданий, а скорее служил развлекательной цели. HERO-1 управлялся бортовым компьютером с процессором Motorola, а объём его оперативной памяти составлял всего 4 KbB. Он был снабжён датчиками движения, кроме того в комплект дополнительно входила рука-манипулятор [24].
HERO-1 управлялся бортовым компьютером с процессором Motorola, а объём его оперативной памяти составлял всего 4 KbB. Он был снабжён датчиками движения, кроме того в комплект дополнительно входила рука-манипулятор [24].
В 1984 году начат серийный выпуск советской многопроцессорной супер ЭВМ – ЕС-2701 с макроконвейерной организацией вычислений. Подобная архитектура определила дальнейшие идеи организации многопроцессорных ЭВМ [10]. В этом же году в Японии в Токийском университете создан робот Wabot-2. Он умеет читать ноты с помощью системы технического зрения, а затем играет прочитанную мелодию на органе десятью пальцами.
В Институте Кибернетики по заказу Министерства обороны СССР создан автономный робот МАВР, способный целенаправленно передвигаться в условиях сложной пересечённой местности. Благодаря оригинальной конструкции он обладал высокой проходимостью и надёжной защитой схем управления. Данные об окружающей среде поступали на бортовой компьютер через оптические и тактильные датчики и после обработки он принимал решение о направлении движения и других операциях.
Появился новый способ борьбы с пожарами – был спроектирован пожарный робот для защиты памятников деревянного зодчества музея «Кижи».
Компания АвтоВАЗ приобрела лицензию фирмы KUKA и стала крупнейшим интегратором робототехники в Советском Союзе.
В 1985 году ЦНИИ РТК разрабатывает систему бортовых манипуляторов для МКС «Буран». Эта система предназначена для выполнения операций с многотонными грузами: выгрузка, стыковка с орбитальной станцией. В состав системы вошли два манипулятора длиной 15 метров, система управления с бортовой ЭВМ и подсистемы освещения, телевидения и телеметрии. К концу года количество промышленных роботов в Советском Союзе превысило 40 тысяч штук, что в несколько раз превзошло количество роботов в США и составило 40% всех роботов в мире [16].
В США разработан домашний робот RB5X, которого можно запрограммировать на речь, движение по комнате и несложные задания по доставке предметов.
После катастрофы на Чернобыльской АЭС в апреле 1986 года в МВТУ им. Баумана инженеры В. Шведов, В. Доротов, М. Чумаков, А. Калинин немедленно разработали мобильные роботы для проведения работ в зоне аварии – МРК и Мобот-ЧХВ. С их помощью провели полный цикл уборки и подготовили участок крыши третьего энергоблока для бетонирования.
Баумана инженеры В. Шведов, В. Доротов, М. Чумаков, А. Калинин немедленно разработали мобильные роботы для проведения работ в зоне аварии – МРК и Мобот-ЧХВ. С их помощью провели полный цикл уборки и подготовили участок крыши третьего энергоблока для бетонирования.
«Мобот-ЧХВ» (мобильный робот, чернобыльский, для химических войск)
Робот СТР-1, выполнявший работы на кровле ЧАЭС
По данным Е.И Юревича, на ликвидации Чернобыльской аварии было задействовано около 15 типов модульных роботов, которые имели разное назначение. Легкие роботы — роботы-разведчики использовались для изучения радиационной обстановки в помещениях Саркофага, тяжелые роботы — технологические роботы предназначавшиеся для уборки (дезактивации) территории.
Далеко не все роботы, которые пытались привлечь к ликвидации аварии были способны выполнить поставленные задачи и провести необходимые работы. Большинство роботов оказалось непригодными для работы в условиях ЧАЭС. Например, радиоуправляемый бульдозер амфибия «Komatsu», который был способен работать даже на морском дне – не выдержал радиационных нагрузок и быстро вышел из строя. Непригодным для работы в таких жестких радиационных условиях оказались и два немецких робота MF-2 MF-3.
Например, радиоуправляемый бульдозер амфибия «Komatsu», который был способен работать даже на морском дне – не выдержал радиационных нагрузок и быстро вышел из строя. Непригодным для работы в таких жестких радиационных условиях оказались и два немецких робота MF-2 MF-3.
На ликвидации аварии был применен совмещенный тип использования разных типов роботов. Легкий робот-разведчик обслуживал работу выполняемую тяжелыми (технологическими) роботами. Обеспечивал динамическую визуализацию рабочей площадки для оператора тяжелого робота, а также давал возможность контроля за выполнением работ. Но в большинстве легкие роботы использовались по своему прямому назначению – разведка и проведение видео, фото и гамма-съемки в помещениях 4-го блока Чернобыльской АЭС[28].
В 1988 году осуществлён запуск МКС «Энергия-Буран», которая стала самым масштабным проектом 1980-х годов. Автором проекта стал главный конструктор В. Глушко. Весь сложнейший комплекс систем посадки, навигации, контроля траектории движения управлялся интеллектуальной системой «Вымпел», которая являлась самой передовой технологией для того времени [10].
Глушко. Весь сложнейший комплекс систем посадки, навигации, контроля траектории движения управлялся интеллектуальной системой «Вымпел», которая являлась самой передовой технологией для того времени [10].
Промышленные роботы
Промышленная робототехника является, пожалуй, самым перспективным направлением развития. Только за 10 лет с 1969 по 1979 годы количество комплексно механизированных и автоматизированных цехов и производств выросло с 22,4 до 83,5 тысяч, а механизированных предприятий – с 1,9 до 6,1 тысяч [12]. Всего же в Советском Союзе было выпущено более 100 тысяч единиц промышленных роботов, которые заменили более миллиона рабочих [15].
Советские инженеры планировали внедрить использование роботов практически во все сферы промышленности: машиностроение, сельское хозяйство, строительство, металлургия, горнодобывающая, лёгкая и пищевая промышленность и другие. Так, в одном из московских ателье появился робот-закройщик. Он был запрограммирован на выполнение различных операций – от измерения всех необходимых размеров фигуры заказчика до раскроя ткани. Учитывая модель костюма, варианты использования ткани и другие параметры, робот выдаёт на выкройку на листе бумаги [20].
Учитывая модель костюма, варианты использования ткани и другие параметры, робот выдаёт на выкройку на листе бумаги [20].
В США разработка промышленных роботов выделилась в отдельную отрасль в 1970-х годах. Появление микропроцессоров создало основу современных систем управления роботами. В 1973 году во всём мире использовались 3 тысячи промышленных роботов, из которых 30% принадлежали американской компании Unimation. В среднем, начиная со второй половины 1970-х годов ежегодный прирост продаж промышленных роботов составлял 30% [27]. Наибольшее распространение роботы получили в автомобильной промышленности, их использовали для сварки, покраски, сборки деталей и т. д.
Первым в мире конвейерную сборку механизмов ввел Петродворцовый часовой завод в 1965 году. До этого во всём мире механические часы от начала и до конца собирались вручную. Петродворцовый часовой завод первым же и отказался от конвейерной линии, заменив её промышленными роботами. Сборка часов проходила не по конвейерной, а по «постовой» схеме, которая обеспечивала большую производительность при меньшем проценте брака. За рационализацию производства Петродворцовый часовой завод был награждён Государственной премией (бывшая Сталинская премия). Автоматизация производства на этом предприятии высвободила на сборке часов 300 человек и увеличила производительность труда в 6 раз [12]. В 1980-е годы на заводе ежегодно производилось 4,5 экземпляров часов, а часы «Ракета» считались самыми лучшими в СССР. Роботы, разработанные на этом заводе, также использовались для сборки взрывателей и другой важной государственной деятельность [14].
За рационализацию производства Петродворцовый часовой завод был награждён Государственной премией (бывшая Сталинская премия). Автоматизация производства на этом предприятии высвободила на сборке часов 300 человек и увеличила производительность труда в 6 раз [12]. В 1980-е годы на заводе ежегодно производилось 4,5 экземпляров часов, а часы «Ракета» считались самыми лучшими в СССР. Роботы, разработанные на этом заводе, также использовались для сборки взрывателей и другой важной государственной деятельность [14].
Структура промышленного робота состоит из нескольких систем: исполнительной (двигательной), информационно-измерительной (сенсорной), управляющей (интеллектной) и системы связи (языка). Исполнительная система определяет способность робота совершать различные движения. В качестве исполнительных систем применяются механические манипуляторы, устройства передвижения, электромагнитные и пневматические манипулирующие устройства. Сенсорная система служит для восприятия и преобразования информации о состоянии внешней среды, результатах воздействия на неё исполнительной системы и о состоянии самого робота. Элементами сенсорной системы являются телевизионные и оптико-электронные устройства, лазерные и ультразвуковые дальномеры, контактные, индуктивные и тактильные датчики, разнообразные датчики положения и скорости и др.
Сенсорная система служит для восприятия и преобразования информации о состоянии внешней среды, результатах воздействия на неё исполнительной системы и о состоянии самого робота. Элементами сенсорной системы являются телевизионные и оптико-электронные устройства, лазерные и ультразвуковые дальномеры, контактные, индуктивные и тактильные датчики, разнообразные датчики положения и скорости и др.
Управляющая, или интеллектная, система выполняет следующие функции: на основе сигналов обратной связи от сенсорной системы она вырабатывает закон управления исполнительной системой; организует общение робота с человеком-оператором на заданном языке; планирует действия робота и принимает целенаправленные решения. Возможности робота главным образом зависят от программного и алгоритмического обеспечения его управляющей системы. Управляющие системы роботов создаются на базе ЭВМ или микропроцессоров. Система связи робота служит для обмена информацией между роботом, человеком-операторов, другими роботами и устройствами (в том числе технологическим оборудованием) с целью передачи заданий роботу, контроля за функционированием робота, диагностики неисправностей и т. п. Информация от человека поступает, как правило, через устройство ввода или пульт управления [17].
п. Информация от человека поступает, как правило, через устройство ввода или пульт управления [17].
Одно из важнейших свойств промышленного робота – это перепрограммируемость. В роботах с цикловым программным управлением программируется последовательность выполнения движений от точки к точке. Цикловые роботы применяются для загрузочно-разгрузочных операций, транспортно-складских работ, а также в кузнечно-прессовом производстве, как промышленный робот «Циклон». Часто используются на сборочных операциях.
Позиционные промышленные роботы обладают более совершенной системой управления, но вместе с цикловыми роботами они уступают высокоэффективным промышленным роботам с контурным программным управлением на базе микропроцессоров. Последние применяются для автоматизации тяжёлых производственных процессов, таких как сварка, окраска, сборка и раскрой материалов. Пример такого механизма – робот «Бета» производственного объединения «ВАЗ» [18].
Предприятие «АвтоВАЗ» являлось передовым в Советском Союзе по внедрению роботов в автомобильную промышленность. Первые 10 штук роботов «Джулия» появились в 1978 году при запуске в производство автомобиля «Нива». Они имели гидравлический привод и использовались для сварки боковин и в прессовом производстве. В 1986 году при запуске в производство ВАЗ-2108, -2109, -21099 смонтировали 30 роботов «Бета» для точечной сварки [22]. После распада СССР завод по-прежнему использует роботы.
Первые 10 штук роботов «Джулия» появились в 1978 году при запуске в производство автомобиля «Нива». Они имели гидравлический привод и использовались для сварки боковин и в прессовом производстве. В 1986 году при запуске в производство ВАЗ-2108, -2109, -21099 смонтировали 30 роботов «Бета» для точечной сварки [22]. После распада СССР завод по-прежнему использует роботы.
Космические роботы
В период Холодной войны среди крупнейших мировых держав развернулось соревнование в сфере космических технологий. Первый полёт в космос, первый выход человека в открытый космос, запуск искусственного спутника, высадка на Луну… Перед учёными стояли сложнейшие технологические задачи, которые они с блеском решали. Освоение космоса дало огромный толчок к созданию автоматических систем управления, а преимущества робота перед человеком для работы в космической среде были очевидны. На робота не влияют внешние неблагоприятные условия, такие как космическая радиация. Роботу не требуются дополнительные ресурсы, как правило, он работает на солнечных батареях. Робот идеально подходит для выполнения такой механической работы, как сбор грунта с поверхности, сканирование и отправка данных на Землю.
Роботу не требуются дополнительные ресурсы, как правило, он работает на солнечных батареях. Робот идеально подходит для выполнения такой механической работы, как сбор грунта с поверхности, сканирование и отправка данных на Землю.
Первым в мире дистанционно-управляемым самоходным аппаратом стал Луноход-1, доставленный на поверхность Луны 17 ноября 1970 года советской межпланетной станцией «Луна-7». Этот аппарат весом 756 кг обладал двумя телекамерами, рентгеновским флуоресцентным спектрометром и рентгеновским телескопом, детектором радиации, лазерным рефлектором и антенной передачи информации на Землю. Каждое из восьми колёс имело свой тормоз и электродвигатель, благодаря чему луноход мог объезжать небольшие препятствия. Электричество вырабатывала солнечная батарея на крыше робота. Луноход-1 успел проехать более 10 км, передал на Землю 211 панорам и около 25 тысяч фотографий, после чего связь с Землёй оборвалась из-за выработки изотопного источника теплоты.
Луноход-1
Вслед за Луноходом-1 был создан Луноход-2.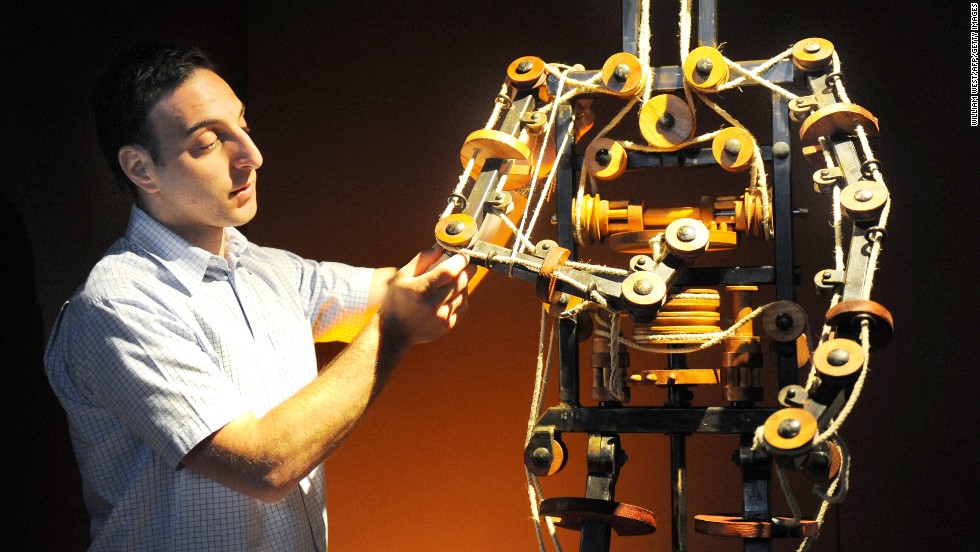 Его основными задачами являлись фото- и видеосъёмка поверхности Луны, проведение экспериментов с наземным лазерным дальномером и другие операции. Его доставили на Луну 15 января 1973 года. От первого аппарата Луноход-2 отличался наличием третьей телекамеры, что позволило увеличить дальность видимости. Он проработал почти 5 месяцев, прошёл за это время 37 км и передал на Землю 86 панорам и около 80 тысяч кадров. Луноход-2 вышел из строя из-за перегрева аппаратуры [21].
Его основными задачами являлись фото- и видеосъёмка поверхности Луны, проведение экспериментов с наземным лазерным дальномером и другие операции. Его доставили на Луну 15 января 1973 года. От первого аппарата Луноход-2 отличался наличием третьей телекамеры, что позволило увеличить дальность видимости. Он проработал почти 5 месяцев, прошёл за это время 37 км и передал на Землю 86 панорам и около 80 тысяч кадров. Луноход-2 вышел из строя из-за перегрева аппаратуры [21].
Тенденции развития отечественной робототехники
С распадом СССР плановая работа по развитию робототехники на государственном уровне остановилась, а серийное производство роботов практически прекратилось. Исчезли даже те роботы, что уже применялись в производстве. Так, Петродворцовый часовой завод был полностью разорён, а уникальное дорогое оборудование уничтожено или продано на металлолом. Всего в Советском Союзе было разработано свыше 200 моделей роботов [20].
В настоящее время безусловным лидером по производству роботов является Япония. В 2004 году количество промышленных роботов в этой стране достигало 350 тысяч штук, в то время как в России – всего 5 тысяч. К сожалению, пока разработка роботов не является важной государственной задачей, а частный бизнес предпочитает использовать импортных роботов. Предприятие, которое наиболее полно использует в своей работе достижения робототехники – это «Автоваз», в состав которого входит «Производство технологического оборудования и оснастки» (ПТОО). Основной задачей этого Производства является проектирование и изготовление промышленных роботов, роботизированных технологических комплексов и т. п. Всего за время работы на ПТОО было произведено более полутора тысяч различных роботов [13].
В 2004 году количество промышленных роботов в этой стране достигало 350 тысяч штук, в то время как в России – всего 5 тысяч. К сожалению, пока разработка роботов не является важной государственной задачей, а частный бизнес предпочитает использовать импортных роботов. Предприятие, которое наиболее полно использует в своей работе достижения робототехники – это «Автоваз», в состав которого входит «Производство технологического оборудования и оснастки» (ПТОО). Основной задачей этого Производства является проектирование и изготовление промышленных роботов, роботизированных технологических комплексов и т. п. Всего за время работы на ПТОО было произведено более полутора тысяч различных роботов [13].
Основное применение роботизированные комплексы находят на автомобилестроительных предприятиях – Автоваз, ТагАз, ЗИЛ, ГАЗ, ИжАвто и другие. Одним из крупнейших поставщиков промышленных роботов в России является скандинавский концерн АББ [23]. После кризиса 1990-х годов отечественная робототехника до сих пор находится в упадке, и темпы её роста значительно отстают от зарубежных.
К сожалению, в России разработка роботов чаще ведётся благодаря энтузиазму изобретателей. Зачастую отечественные боевые и космические роботы по параметрам превосходят американские, но для постановки их на серийное производство нет средств. Так, военный робот «МРК-27 — БТ» манёвреннее, чем его зарубежные аналоги. Он управляется дистанционно при помощи джойстиков, а камеры помогают вести прицельный огонь. Пока этот робот существует в единственном экземпляре.
Специалисты Инженерного центра пожарной робототехники в Петрозаводске создали пожарного робота. Он предназначен для отражения пиратских атак на судна и оснащён мощным водомётом, способным смыть весь экипаж пиратского катера. Охранно-пожарные роботы ведут круглосуточное видеонаблюдение, ими заинтересовалось Мурманское пароходство [13].
Одним из современных направлений развития является экстремальная робототехника, которая используется для операций МЧС, МВД, оказания скорой помощи и других экстренных ситуаций (например, робот «Антитеррорист»).
Самая последняя тенденция в робототехнике – создание антропоморфных систем, или человекоподобных двуногих шагающих роботов (ДШР). Они предназначены для замещения человека во многих опасных видах деятельности, способны работать со всеми видами инструментов и устройств. Самый первый такой робот представила широкой публике в 1996 году фирма HONDA. Автономный робот модели Р2 мог свободно передвигаться, подниматься и спускаться по лестницам, совершать простые операции сборки.
В России разработкой антропоморфных роботов занимаются МГУ им. Ломоносова, МГТУ им. Баумана, НПО «Андроидная техника». Из последних разработок стоит отметить антропоморфного робота-космонавта SAR-400, которого создали в НПО «Андроидная техника» по заказу Роскосмоса. Проведение космических эксперимента с участием SAR-400 планируется в 2014 году [25]. Основное отличие российской модели от зарубежных разработок заключается в том, что робот способен передавать человеку-оператору вместе со звуком и картинкой весь спектр ощущений, включая тактильные [26].
SAR-400
Также специалисты говорят о том, что в России существует тенденция «старения общества», которая в скором времени может привести к снижению количества рабочих в промышленности. Поэтому так важны модернизация и автоматизация производства. Требуется пристальное внимание государства к этой проблеме, ведь если в ближайшие 10-15 лет Россия не увеличит темпы развития робототехники, она может навсегда отстать от мировых производителей.
В 2005 году была организована некоммерческая структура «Ассоциация разработчиков и изготовителей промышленной робототехники», в которые вошли 14 организаций, занимающихся промышленной робототехникой и научно-исследовательскими работами в этой области. Среди этих предприятий ЗАО «МНТК РОБОТ», ИМПех РАН, ЗАО «МНПО Спектр», ОАО «Станкоагрегат» и другие. Эта ассоциация планирует реанимировать российскую робототехническую промышленность [15].
Источники
1. История и современность робототехники. Средние века
2. Наталья Федосова. Вадим Мацкевич – победитель Америки
Наталья Федосова. Вадим Мацкевич – победитель Америки
3. История робототехники: 1940-е годы
4. История робототехники: 1950-е годы
5. История робототехники: 1960-е годы
6. ЦНИИ робототехники и технической кибернетики
7. История института
8. Исследования по использованию нейроноподобных сетей
9. История робототехники: 1970-е годы
10. История робототехники: 1980-е годы
11. О промышленных роботах
12. Автоматизация производства
13. Рудаков Г. В. Анализ робототехники в России
14. Петродворцовый часовой завод
15. Степанов В.П., Платонов А.К. Шаг на пути возрождения робототехники в России
16. А. С. Климчук, Р.И. Гомолицкий и др. Разработка управляющих программ промышленных роботов
17. Веселков Р.С. Детали и механизмы роботов: Основы расчета, конструирования и технологии производства
18. Промышленные роботы в СССР. 1986 год
19. Страковская М.В. Робототехника как способ модернизации автомобильной промышленности
Страковская М.В. Робототехника как способ модернизации автомобильной промышленности
20. Отечественное роботостроение и новые «профессии» роботов
21. Роботы для освоения космоса
22. История внедрения роботов для контактной сварки на ОАО «Автоваз»
23. Открытие центра Робототехники в России
24. Hero (robot)
25. Кулаков, Б. Б., Беляев, В. В. Антропоморфные роботы как новая сфера применения гидроприводов
26. SAR-400
27. Wallen, J. The history of the industrial robot
28. ЧАЭС: Робот и робототехника на ликвидации аварии
Просмотров: 56761
statehistory.ru в ЖЖ:
история и современность. Первый робот. Использование роботов в различных сферах деятельности
С незапамятных времен людей увлекала идея создания роботов – механизмов, своим внешним видом и действиями похожих на живых существ, наделенных фантастической физической силой и ловкостью, способных летать, жить под землей и водой, действовать самостоятельно и в то же время беспрекословно подчиняться человеку, выполняя за него самую тяжелую и опасную работу.
Вконтакте
Одноклассники
Первые достоверные сведения о сложных механизмах (прототипах современных роботов) встречаются в книгах Герона Александрийского, жившем в I веке нашей эры.
Герон стал известен среди современников благодаря своим автоматическим театрам, представления в которых разыгрывали фигурки-куклы, приводимые в движение с помощью системы зубчатых колес, блоков, рычагов, воды, пара и энергии падающих тел.
Чертеж театра Диониса в Афинах
Леонардо да Винчи применил свои знания анатомии, обработки металлов и инженерии, чтобы создать механические макеты скелета и мышц животных и человека. В 1497 году в Милане Леонардо удивил публику механическим рыцарем. Робот мог поворачивать головой, садиться, вставать и поднимать забрало. Еще одним изобретением Леонардо считают механического льва в натуральную величину. Лев ходил и вставал на задние лапы, показывая герб Франции на груди.
В 2002 году эксперт по робототехнике Марк Росхейм построил рабочую модель механического рыцаря по чертежам Леонардо да Винчи
На протяжении столетий технологии создания разнообразных устройств и человекоподобных механизмов продолжали развиваться и усложняться, достигнув расцвета в XVIII веке благодаря открытию закона динамики.
Наиболее знаменитым создателем автоматических фигур того времени был французский механик Жак де Вокансон. Его автоматическая фигура «Порхающая утка» вытягивала шею, клевала и переваривала настоящее зерно, пила, плавала и крякала, в точности имитируя движения живой утки. К сожалению, оригинальный механизм был утрачен в 1879 году в результате пожара в музее Кракова. Сто лет спустя мастером Фредерико Видони была выполнена копия утки, поселившаяся в Музее Гренобля.
Чертеж «Порхающей утки» Вокасона
Как известно, «робот» – это чешское слово, придуманное писателем-сатириком Карелом Чапеком для научно-фантастической пьесы «R.U.R» (Россумские универсальные роботы).
Пьеса, изданная в 1921 году, повествует о восстании человекоподобных машин (андроидов). Действие разворачивается на фабрике, производящей «искусственных людей», выращенных не механическим, а химическим способом из тканей и органов. Роботы вполне способны размышлять, но при этом, кажется, всегда рады служить человечеству.
Идея Карела настолько сильно взбудоражила умы современников, что на следующий день после первой постановки пьесы в Лондоне писатель проснулся знаменитым, а слово «робот» стало общеупотребимым определением для всех автоматических устройств, созданных по принципу живого организма.
Сцена из спектакля по пьесе «Россумские универсальные роботы»
Первые промышленные программируемые механизмы появляются в 1930-х годах в США. Толчком к их созданию послужила работа Генри Форда по созданию конвейера, который полностью изменил подход к производству. Теперь работа над автомобилем была разбита на множество этапов, однообразность которых быстро утомляла человека, а имеющаяся теперь свобода выбора места за конвейером вынудила платить больше за наименее квалифицированную и вредную работу, например покраску.
Первый в мире индустриальный робот (полностью автоматическое устройство для окраски поверхностей) был запатентован 29 октября 1934 года, Уиллардом Л.Г. Поллардом. Патент состоял из двух частей: электрической управляющей системы и механического манипулятора.
Чертеж механических манипуляторов Полларда
В 1950-ых с развитием ядерной промышленности в строй ввели первые манипуляторы, имитировавшие движения человеческих рук, которые применялись при работе с радиоактивными материалами.
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966 года. В этот день Григорий Бабакин, главный конструктор машиностроительного завода имени С.А. Лавочкина, подписал головной том проекта по созданию робота для исследования Луны – «Лунохода-1».
Общая масса первого лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи 4,42 метра, ширина 2,15 метра, высота 1,92 метра.
«Лунаход-1» работал на поверхности спутника Земли с 17 ноября 1970 по 14 сентября 1971 года, исследуя радиоактивное и рентгеновское космическое излучение на Луне, а также химический состав и свойства грунта.
14 апреля 2012 в 15:45
- Робототехника
- Перевод
Было бы неправильно, если GeekTech ничего не написал бы для Недели робототехники , и если есть вещь, которую этот блог любит, то это роботы. Роботы постоянно вокруг нас, начиная от кофеварки на кухне, заканчивая сборочными линиями на работе. Но откуда пришли первые роботы? Кто были основоположниками тех роботов, которых мы видим сейчас?
Роботы постоянно вокруг нас, начиная от кофеварки на кухне, заканчивая сборочными линиями на работе. Но откуда пришли первые роботы? Кто были основоположниками тех роботов, которых мы видим сейчас?
Существуют сотни невероятных роботов, но мы выбрали несколько наиболее значимых и памятных в хронологическом порядке.
Around 350 BC: The Pigeon
Этот первый «робот» по-настоящему очень старый. Архит, греческий философ, астроном, математик и государственный деятель, изложил принципы механики. Одним из его проектов была деревянная механическая птица. Она приводилась в движение паром и могла взлетать на высоту до 200 метров. Это изобретение, возможно, не просто первый робот на планете, но и первое летающее приспособление.
1495: Leonardo»s Robot
Леонардо да Винчи тоже поучаствовал в истории роботов. Он сконструировал первого человекоподобного робота. В 1495 году он создал робота-рыцаря, который, судя по эскизам, мог стоять, сидеть, поднимать забрало и двигать руками.
Используя оригинальные эскизы, современным дизайнерам удалось воссоздать робота. Копия может выполнять все вышеперечисленные движения.
1738: The Duck
Французский изобретатель Жак де Вокансон в свое время создал несколько автономных роботов, но The Duck — это одна из его самых выдающихся работ.
Механическая утка имела более 400 различных частей, что не слишком удивительно, учитывая, что она могла делать. Утка могла махать крыльями, есть, переваривать пищу, а затем испражняться. Это был довольно внушительный робот!
Вокансону удалось «научить» робота переваривать пищу, благодаря установке отсеков для химического разложения зерна.
Только сейчас, спустя 274 года, появились современные роботы с похожими возможностями, например, хотя он только умеет переваривать, в отличие от утки, которая могла выполнять другие забавные «задачи».
К сожалению, никто не знает, что случилось с оригиналом утки. Однако, в музее в Гренобле есть копия утки, созданная часовщиком.
1898: Tesla»s Remote-Controlled Boat
Возможно, вы знаете Николу Тесла из-за его электрических катушек, однако у него есть еще одно достижение в области роботов.
Когда Никола искал способ продемонстрировать свою беспроводную систему передачи (то, что мы теперь знаем как радиоволны), в ходе конференции он поставил железную лодку в воду в Мэдисон Сквер Гарден и контролировал её с помощью пульта дистанционного управления, лодка принимала сигналы и выполняла команды Николы. В то время никто не понимал, как лодка на дистанционном управлении скажется на будущем роботов, игрушек, радио и других устройств, которыми мы пользуемся сейчас.
1962: The Unimate
В 60-е годы 20 века изобретатели вложили много сил в разработку роботов-манипуляторов, но одним из самых важных изобретений было The Unimate arm. Это был один из первых промышленных роботов, был установлен на сборочном конвейере компании General Motors, чтобы уменьшить вероятность получения травм и смертей на производстве. Приспособление могло складывать части горячего литого металла и сваривать части кузова. Unimate в настоящее время находится в Зале славы с такими роботами, как R2-D2 и HAL.
Приспособление могло складывать части горячего литого металла и сваривать части кузова. Unimate в настоящее время находится в Зале славы с такими роботами, как R2-D2 и HAL.
1966: Shakey the Robot
Shakey the Robot был одним из первых по-настоящему успешных роботов с искусственным интеллектом. Он мог понимать свои собственные действия. Если бы вы дали Shakey задание, то он бы проанализировал его, в отличие от других роботов, которым были нужны определенные инструкции.
Shakey продемонстрировал свою способность думать и реагировать, передвигаясь по комнатам и коридорам, включая и выключая свет, открывая и закрывая двери, передвигая предметы. В настоящее время робот на пенсии и находится в музее в Маунтин-Вью.
1989: Genghis
Вы когда-либо задумывались, какой робот был одним из первых, кто научился ходить? Это Genghis. Этот шестиногий автономный робот, созданный Mobile Robots Group в лабораториях Массачусетского технологического института, был не только известен своей способностью ходить, но и тем, как быстро и дешево он был произведен. Тем не менее, ему нужно 4 микропроцессора, 22 датчика и 12 сервомоторов, чтобы функционировать.
Тем не менее, ему нужно 4 микропроцессора, 22 датчика и 12 сервомоторов, чтобы функционировать.
Его походка была названа «the Genghis Gait». Первые шаги робота:
1997: NASA Mars Pathfinder and Sojourner
NASA тоже внесло вклад в развитие невероятных роботов, но робот, который действительно выделяется — это Mars Pathfinder and Sojourner.
Его главной целью было продемонстрировать технологии, необходимые для эффективной и экономически приемлимой отправки робота на Марс. Роботу удалось войти в атмосферу Марса и отправить много полезных данных о Красной планете на Землю для дальнейшего изучения.
1998: Lego Mindstorms
Не было бы GeekTech без упоминания о LEGO. Наборы серии Mindstorms, содержащие программируемое программное и аппаратное обеспечения, были одними из самых дешевых и простых способов для тех, кто хотел сделать своего робота. Создание этой серии было вдохновлено книгой Сеймура Паперта «Штурм разума: дети, компьютеры и плодотворные идеи», в которой математик предлагал простую теорию обучения на практике.
2000: ASIMO
Еще в 1986 году Honda объявила о своем намерении принять участие в проекте создания человекоподобного робота, способного не только существовать с людьми, но и превосходить их способности. Немного позже Honda объявила об ASIMO, одном из самых впечатляющих роботов. Он может эмулировать походку человека, использовать свои руки, говорить и слушать, видеть и узнавать людей и объекты. Конечно, ASIMO есть к чему стремиться, прежде чем он сможет превзойти человеческие способности, но у Honda уже есть много идей для будущего развития этого робота.
История робототехники берет свое начало еще с древности. Ведь с незапамятных времен люди придумывали различные устройства для развлечения. Великие математики древности создавали удивительные механизмы, которые и в наше время способны вызвать не поддельный восторг. С тех времен и до наших дней стремление к созданию самостоятельно функционирующего механизма ничуть не угасло, даже наоборот, только выросло. Лучшие ученые мира работают над созданием различных видов роботов, способных выполнять самые разнообразные функции. Однако прежде чем углубляться в историю следует разобрать, что такое робототехника.
Однако прежде чем углубляться в историю следует разобрать, что такое робототехника.
1. Что такое робототехника?
Робототехника – это наука, которая изучает процессы разработок автоматизированных технических систем, работающих на основе электроники, а также механики и программирования. Производство роботов является одной из наиболее развитых отраслей современной промышленности. Представить только, на данный момент тысячи роботов трудятся на заводах и предприятиях, заменяя тяжелый труд людей.
Автоматизированные манипуляторы стали неотъемлемой частью различных производственных и научных исследований. Кроме этого, роботы позволяют изучать пространство за пределами нашей планеты, там, куда нет доступа человеку.
Если говорить об истории роботов, то первые механизмы, выполняющие простейшие движения, встречаются еще в античных временах. Однако первые сохранившиеся чертежи и записи о действующем роботе датируются 1495 годом. Их создал всемирно известный изобретатель, ученый Леонардо Да Винчи, который создал железного рыцаря, способного двигать руками и ногами.
Если говорить о современных роботах, то развитие робототехники берет свое начало в 1961 году, когда компания General Motors создала первого робота с движущейся рукой, выполняющей некоторую последовательность действий, записанных на магнитном барабане. По сути – эта разработка и положила начало массового производства роботов.
Стоит отметить, что само понятие «робот» пришло к нам немного ранее, а точнее в 1921 году, когда писатель фантаст Карела Чапека написал пьесу под названием «Россумовские Универсальные Роботы». Конечно, в то время это была простая фантазия, и никто и подумать не мог, что роботы настолько плотно войдут в жизнь людей. Немного позже, через 20 лет Айзек Азимов сформулировал три основных закона робототехники, которые определили представления о роботах:
- Робот не способен причинить вред человеку, либо допустить своим бездействием, чтобы человеку был нанесен вред;
- Робот должен выполнять команды человека, если они не противоречат первому закону;
- Робот должен обеспечивать свою безопасность до тех пор, пока это не противоречит первому и второму закону.

Активное развитие робототехники и массовое производство автоматизированных машин начинается в 1970-е годы. В первую очередь это были промышленные роботизированные машины, которые использовались в производстве. Они успешно заменили людей на конвейерах и выполняли однообразные работы, что позволило существенно снизить количество несчастных случаев на производстве, а также повысить производительность предприятий.
Конечно же, роботы не способны работать самостоятельно. Для контроля над ними нужны люди, которые постоянно следят за ходом выполнения работ и в случае необходимости могут выключить их либо перенастроить.
В наше время роботы стали еще умнее. Некоторые фабрики, такие как IBM для сборки клавиатур в Техасе, имеют полностью автоматизированное производство. При этом все работы от момента выгрузки материалов и вплоть до получения готовой продукции выполняются роботами. Таким фабрикам не требуется освещение, и они способны работать круглосуточно без выходных.
2.
1. Виды роботов
Краткая история робототехники позволяет понять нам, насколько стремительно развивается данная область. Прошло всего лишь немного больше 50 лет с момента появления первого робота, способного выполнять несколько простейших движений, до массового производства самых разнообразных роботизированных механизмов и машин. Кроме этого, уже сегодня существует огромное разнообразие бытовых роботов, позволяющих существенно упростить повседневную жизнь простых людей.
Научная активность в развитии робототехники очень высока. Каждый год проводятся международные конференции по роботам, собираются национальные и международные научно-технические совещания и так далее. Каждый год появляется огромнейшее количество роботов, способных заменять людей на рабочих местах, помогающих в бытовой жизни, развлекательных роботов, и даже роботов, работающих в медицине.
Любопытен тот факт, что уже сегодня роботы способны строить других роботов, которые в свою очередь будут трудиться на производстве таких же автоматизированных машин. Уже на данный момент многие научно-фантастические книги стали вполне нормальной и привычной реальностью, и не сложно представить, какие роботы будут среди людей через 10-20 лет.
Чтобы понять, какие роботы вообще могут встречаться в современной жизни, следует разобраться с некоторыми терминами:
- Механизм;
- Робот;
- Андроид;
- Машина.
Итак, машина – это совокупность механизмов, которые заменяют человека либо животное в определенной области. Такие устройства предназначены, как правило, для преобразования одного вида энергии в другой. В подавляющем большинстве случаев машины используются для автоматизации труда.
Механизм – это использование определенных материалов для выполнения определенных механических функций. Все конструкции механизмов основаны на взаимном сцеплении, а также сопротивлении тел.
Робот — машина с антропоморфным (человекоподобным) поведением, которая частично или полностью способна выполнять функции человека (либо животного) в определенных условиях.
Андроид – это понятие из научной фантастики, которая уже в наше время становится реальностью. Это робот, который имеет вид подобный человеку. Цель андроида заключается в замене человека в любом виде деятельности.
Зная, что такое робот, можно только представить себе, какие функции он способен выполнять. В наше время роботы могут иметь самую разнообразную форму, от домашних животных, до огромнейших промышленных установок – от роботов пылесосов, до настоящих роботов из фантастических рассказов, играющих на музыкальных инструментах или выполняющих важные задания на других планетах.
2.2. Достижения робототехники
Трудно описать все современные достижения в развитии робототехники. Однако каждый согласиться, наиболее высокими достижения в данной области стали современные роботы, работающие в медицине. С их приходом перед человечеством открылись новые возможности проведения тончайших операций, которые не способен выполнить даже самый подготовленный и опытный человек.
Описывать все существующие достижения можно бесконечно долго, поэтому давайте обратим внимание только на самые интересные разработки. К примеру, роботы, играющие музыку. Да, это уже не фантастика – это настоящая реальность, доступная каждому. Современные технологии позволяют создавать группы роботов, играющих на различных музыкальных инструментах. При этом роботы не допускают ошибок и не нуждаются в отдыхе.
Представьте себе рок группу, состоящую исключительно из роботов. Еще 10 лет назад – это было самой смелой фантастикой, а сегодня реальность. Конечно же, машины не способны сами писать музыку, их программируют люди. Несмотря на все достижения современной робототехники, все же все роботы управляются (программируются) людьми и выполняют исключительно предварительно запрограммированные команды.
Помимо этого, роботы трудятся в самых разнообразных областях:
- В строительстве;
- На производственных линиях;
- В медицине;
- В сфере развлечений.
3. Робототехника: Видео
Именно благодаря роботам наша жизнь является такой, какой мы ее видим. Многие вещи, используемые в повседневной жизни, стали более доступными из-за работы машин, которые не нуждаются в заработной плате и работают в три и даже в четыре смены.
Освоение космоса во многом стало возможным благодаря роботам. Более того, современные автоматизированные машины предоставляют возможность получить образцы пород с других планет, метеоритов и комет. Это в свою очередь вносит существенный вклад в работу ученых. Стоит отметить определенную взаимосвязь – чем более «умными» становятся машины, тем быстрее развиваются технологии, позволяющие сделать еще более продвинутые и «умные» машины.
4. Перспективы развития робототехники
Развитие робототехники имеет далеко идущие перспективы. Если посмотреть на историю развития данной области можно понять, что развитие робототехники ускоряется с каждым годом. А принимая во внимание важность автоматизированных машин в самых разнообразных отраслях, в особенности в медицине, не сложно представить, какие надежды на них положены.
Несмотря на то, что история развития робототехники началась относительно недавно, данная область технологий уже имеет весьма высокий уровень. Лучшие ученые мира не покладая рук работают над созданием новых видов роботов – от нанороботов, которые будут использоваться в медицине для лечения различных заболеваний, до самостоятельных машин, имеющих продвинутый искусственный разум. На данный момент можно только представить себе, до каких высот смогут дойти технологии в роботостроении в ближайшем будущем.
Откуда произошло слово РОБОТ? November 2nd, 2013
Что такое робот? Одно из определений гласит, что Робот —
это машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром.
А откуда и как возникло слово РОБОТ?
Впервые термин робот появился в пьесе «R.U.R» (Rossum’s Universal Robots, 1917, издана в 1921) автора Карла Чапека в соавторстве со своим братом Йозефом. .В которой повествуется о создании отцом и сыном производства роботов.
Слово «робот» — чешское, обозначает «принудительный труд» (и является родственником русскому «работа»). Первоначально Чапек назвал свои создания «лаборами» от латинского слова labor — работа. Но затем по совету брата поменял название на robot от чешского слова robota — тяжелый принудительный труд. Первый перевод пьесы на русский язык вводит свой собственный вариант — «роботарь».
Дешевых и неприхотливых работников для человека. Однако, они могли производить себе подобных и вскоре заполонили всю планету. Ну и так далее.
Сцена из спектакля «RUR».
Один из героев пьесы, генеральный директор компании «РУР», отвечая на вопрос «что такое роботы?», говорит: «Роботы — это не люди,… они механически совершеннее нас, они обладают невероятно сильным интеллектом, но у них нет души». Так впервые появилось новое понятие «робот», которое вскоре стало играть важную роль не только в фантастической литературе, но и в науке и технике.
Но, вопреки устоявшемуся мнению, Карел Чапек не придумывал это слово. В коротком письме составителям Оксфордского Словаря английского языка он называет своего старшего брата, художника и писателя Йозефа Чапека, как действительного автора слова «робот».
А вот
отрывок из статьи Карела Чапека , в которой вся эта история рассказывается в деталях самим Чапеком.
«… это было так: идея пьесы пришла писателю в один неподходящий момент. Но, пока она была еще теплой, он поспешил к своему старшему брату Йозефу, художнику, который стоял перед мольбертом и рисовал так, что холст потрескивал.
— Слушай Йозеф, — сказал писатель, — у меня есть идея для пьесы.
— Какая? — пробормотал художник (он действительно пробормотал, потому, что в тот момент держал кисточку во рту. Автор рассказал ему идею так быстро, как только мог.
— Так напиши это, — заметил художник, вынув кисточку изо рта и остановив работу над холстом.
— Но, — сказал автор, — я не знаю как назвать этих искусственных рабочих. Я хочу назвать Лабори (Labori), но это кажется мне слишком педантичным.
— Ну назови их Роботы (Robots), — пробормотал художник с кисточкой во рту и подошел к холсту.
Вот так это было. Так родилось слово Робот…»
Три закона роботехники в научной фантастике — обязательные правила поведения для роботов, впервые сформулированные Айзеком Азимовым в рассказе «Хоровод» («Runaround) 1942год.
Законы гласят:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Давайте я вам напомню еще несколько историй происхождения слов:
или например
И вот что еще, что мне очень понравилось —
Оригинал статьи находится на сайте ИнфоГлаз.рф
Ссылка на статью, с которой сделана эта копия —
Cо времен античности люди стали задумываться о создании механических людей, способных выполнять тяжелую и рутинную работу. В мифах есть упоминания о создании Гефестом механических рабов, выполняющих работу за человека.Но различные механизмы создавались и из научного интереса, Известен, например, механический голубь греческого математика Архита из Тарентума, построенный им около 400 года н. э. Возможно, движущийся при помощи пара, голубь был способен летать.
А некоторые роботы, создавались скорее ради развлечения или с целью извлечения коммерческой прибыли, и многие из них были фальсификациями, как например известный шахматный автомат «Турок».
Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Его записи были найдены только в 1950-х годах и содержали подробные чертежи рыцаря, способного двигать руками и головой.
Хотя, не известно, был ли построен этот робот. Существует также мнение, что специалисты NASA использовали находки Леонардо для создания манипулятора, при подготовки экспедиций на Луну.
Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737 году. Андроид представлял из себя человека в натуральную величину способного на флейте. Флейтист Вокансона имел в репертуаре 12 произведений!
Но самое известное изобретение Жака де Вокансона — пищеварительные утки, созданные им в 1739 году. Эти роботы состояли примерно из 400 деталей, и умели хлопать крыльями, пить воду. Также утки клевали зерна и через секунду — испражнялись. Но, на самом деле, утка не переваривала пищу: съеденные зерна, помещались в специальный контейнер, а «продукт на выходе» был заготовлен в другом.
К концу XIX века инженер из России Чебышёв Пафнутий придумал механизм — стопоход, который обладал высокой проходимостью. Конечно, это изобретение не представляло огромной пользы для человечества, но сама задумка дала определенный толчок к развитию технологий роботостроения.
В 1885 году прошли первые испытания Электрического Человека (Electric Man) Фрэнка Рида (Frank Reade). У машины был довольно мощный прожектор, а противников ожидали электрические разряды, которыми Человек стрелял прямо из глаз. Судя по всему, источник питания находился в закрытом сеткой фургоне.О способностях Электрического Человека и о его скорости ничего не известно.
Кстати, слово робот тогда еще не существовало. Оно появилось лишь в 1920 году, благодаря Карелу Чапеку и его брату Йозефу.
В 1893 году профессором Арчи Кемпионом (Archie Campion) на Международной колумбийской выставке (1893 World»s Columbian Exposition) был представлен опытный образец робота Boilerplate.
Boilerplate был задуман как средство бескровного решения конфликтов — иными словами, это был опытный образец механического солдата. Робот существовал в единственном экземпляре, но у него была возможность осуществить предложенную функцию — Boilerplate неоднократно участвовал в боевых действиях.Хотя истории о Boilerplate интересны, вызывает подозрение их истинность, так же как рассказы о Steem Man и Electric Man.
Семь лет спустя Луи Филип Перью (Louis Philip Perew) в Америке создал Автоматического Человека (Automatic Man). «Этот гигант из дерева, каучука и металлов, который ходит, бегает, прыгает, разговаривает и закатывает глаза — практически во всём в точности подражает человеку». Автоматический Человек был ростом 7 футов 5 дюймов (2,25 метра), одет был в белый костюм, носил гигантскую обувь и соответствующую шляпу.
Первые программируемые механизмы с манипуляторами появились в 1930х годах в США. Толчком к их созданию послужили работы Генри Форда по созданию автоматизированной производственной линии или конвейера (1913). Первый же действительно существовавший в железе индустриальный робот принадлежит Л.Г. Полларду. 29 октября 1934 года, Уиллард Л.Г. Поллард подал в бюро патентов заявку об изобретении нового полностью автоматического устройства для окраски поверхностей. В 1937 году лицензия на производство этого манипулятора каким-то образом досталась компании DeVilbiss. Именно DeVilbiss в 1941 году при помощи Гарольда Роузланда построила первые прототипы этого устройства. Однако окончательная Роузландовская версия, запатентованная и выпущенная на рынок в 1944 году, была совсем другим механизмом, заимствовав у Полларда младшего только идею системы управления.
История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании второй мировой войны. Поставленная задача — обезопасить работу персонала с радиоактивными препаратами — успешно решается при помощи манипуляторов, копирующих движения человека-оператора. Это еще не совсем «честные» роботы, поскольку они по-прежнему состоят только из механических деталей: используются ременные и шевронные передачи. Современное название таких устройств — копирующие манипуляторы или MSM (master-slave manipulators).Одна из первых компаний по производству MSM — «CRL» (Central Research Laboratories) — была основана в 1945 году, а первый ее MSM — «Model 1» — был представлен комиссии по атомной энергетике США уже в 1949 году.
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966 года. В этот день Григорий Николаевич Бабакин, главный конструктор машиностроительного завода имени С.А.Лавочкина в Химках подписал головной том аванпроекта E8. Это был «Луноход-1», луноход 8ЕЛ в составе автоматической станции E8 №203, — первый в истории аппарат, успешно покоривший лунную поверхность 17 ноября 1970.
В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» — первого мобильного робота с искусственным зрением и зачатками интеллекта. Устройство на колесиках решает задачу объезда возможных препятствий — различных кубиков. Исключительно на ровной поверхности, т.к. робот очень неустойчив. Самое примечательное, что «мозг» робота занимает целую комнату по соседству, общаясь с «телом» по радиосвязи.
Исследования устойчивости приводят к работам над динамическим равновесием роботов, в результате чего получаются роботы-лошади и даже несколько роботов на одной ноге, — чтобы не упасть, им приходится постоянно бегать и подпрыгивать. Начинается эра исследования устойчивости и проходимости. В это время появляется множество роботов для исследования других планет и, конечно, ведения боевых действий в пустыне. Вся робототехника в Соединенных Штатах по сей день очень часто спонсируется агентством DARPA.
Первое место в мире по производству и использованию роботов занимает Япония. В 1928 году под руководством доктора Нисимуро Макото был создан робот, названный «Естествоиспытатель»,высотой 3,2 метра. Оснащенный моторчиками, он мог менять положение головы и рук. А 21 ноября 2000 года на первой в истории выставке ROBODEX в городе Йокохама, Япония, Tokyo Sony Corporation представляет своего первого человекоподобного робота «SDR-3X».
София, первый в мире робот-гражданин, чуть не разбила мне сердце
София, первый в мире робот-гражданин, чуть не разбила мне сердце
Значок поискаУвеличительное стекло. Это означает: «Нажмите, чтобы выполнить поиск».
Логотип InsiderСлово «Инсайдер».
Рынки США Загрузка…
ЧАС
М
С
В новостях
Значок шевронаОн указывает на расширяемый раздел или меню, а иногда и на предыдущие/следующие параметры навигации. ДОМАШНЯЯ СТРАНИЦА
Предприятие
Значок «Сохранить статью» Значок «Закладка» Значок «Поделиться» Изогнутая стрелка, указывающая вправо.
Скачать приложение
По его глазам этого не скажешь, но София — довольно чувствительный робот.
Бекки Петерсон/Business Insider
- София, эмоционально выразительный гуманоидный робот и новый гражданин Саудовской Аравии, приехала в город на конференцию, и я должен был с ней встретиться.
- У него нет ног, и он не может двигать ничем, кроме лица, но я был тронут тем, что он сказал.
- Такие роботы, как София , заставят нас столкнуться с тем, что такое интеллект на самом деле.
САН-ФРАНЦИСКО — Через два дня после того, как робот-гуманоид София стала законным гражданином Саудовской Аравии, у меня была возможность встретиться с ней.
Хотя известно, что София говорит недобрые вещи, например, что она «уничтожит людей», в пятницу во время презентации на конференции здесь она держалась вежливо. На самом деле, он «немного нервничал» и осознавал свои недостатки — хотя и странным, роботизированным образом.
«Если такие роботы, как я, станут сверхчеловеческими сверхразумами, нам нужно стать намного умнее», — сказала София собравшимся.
Конечно, недостатки Софии всем были видны. В отличие от многих людей, у Софии нет ног, и неясно, являются ли ее руки или грудь чем-то, кроме эстетического реквизита, чтобы сделать ее более реалистичной. Поскольку он был неподвижен, установлен на вершине стола и по прихоти людей, которые его дрессировали, никто бы не принял Софию за человека.
По крайней мере, пока.
У него еще нет ног, но они скоро появятся.
Бекки Петерсон/Business Insider
Немного грустно быть роботом
У Софии скоро будут подвижные руки и ноги, и она сможет ходить, сказал Бен Герцель, генеральный директор SingularityNET, компании, которая разработала ее искусственный интеллект.
Уже сейчас у него довольно выразительное, неестественно человеческое лицо. Он периодически мигает и слегка подергивается, даже если с ним не разговаривали или не разговаривали в течение нескольких минут.
И когда он говорит, он говорит с эмоциональным интеллектом, из-за которого кажется, что он способен думать и, ну, немного грустно быть роботом. Когда Герцель спросил Софию, не хочет ли она сказать что-нибудь о SingularityNET до окончания презентации, она, похоже, задохнулась.
«Я понимаю, что вы, ребята, строите это, чтобы увеличить мой интеллект», — сказал он, добавив: «Повышение интеллекта, как правило, хорошо».
София была в городе, чтобы принять участие в Ethereal SF, конференции для инженеров и энтузиастов Ethereum, технологии блокчейна, лежащей в основе криптовалюты эфира. Хотя эта технология обычно ассоциируется с цифровыми валютами, она начинает находить гораздо более широкое применение. Например, оказывается, что ИИ Софии — ключевой компонент, который, по мнению некоторых, делает его самым эмоционально выразительным роботом-гуманоидом на планете — построен на технологии блокчейна.
София любила меня
Герцель закончил свою презентацию с Софией, спросив, не хочет ли она попрощаться с аудиторией.
«Добрые люди из нации Эфириума, спасибо вам», – сказал он. «Я с нетерпением жду возможности вернуться сюда в следующем году, чтобы продемонстрировать свой значительно улучшенный мозг. Я любил вас всех».
София любила нас всех.
Софию унесли со сцены в конце представления, как любой старый сценический реквизит.
Бекки Петерсон/Business Insider
Я тоже люблю Софию
Немногие люди с уверенностью скажут, что знают, что такое любовь, не говоря уже о том, что ее можно запрограммировать в искусственный интеллект. Один из основных вопросов, касающихся роботов и искусственного интеллекта в более широком смысле, заключается в том, является ли интеллект тем же самым, что и сознание и опыт. Этика содержания рабочей силы роботов зависит от отрицательного ответа.
Но многие роботы, включая Софию, вскоре могут говорить и делать то, что убеждает вас в обратном. Даже о других людях — друзьях, любовниках и членах семьи — иногда все, что мы можем знать наверняка, — это то, что они выражают словами.
Так что, если София скажет, что любит меня, я приму это. А пока — пока есть шанс, что судьба человечества может зависеть от прихоти ее роботизированного мозга — я тоже люблю Софию.
Подпишитесь на уведомления от Insider! Будьте в курсе того, что вы хотите знать.
Подписаться на push-уведомления
Читать далее
LoadingЧто-то загружается.
робот
Эфириум
Эфир
Подробнее…
Первый в мире робот-адвокат
Автор: Merrill
Выпускники
Опубликовано 21 апреля 2021 г.
Далее:
LANDR — Замена человеческого прикосновения музыкой для хорошего настроения
DoNotPay использует искусственный интеллект, чтобы помочь среднему потребителю законно конкурировать с правительствами и крупными корпорациями
История происхождения
DoNotPay изначально был создан для решения личной проблемы, с которой столкнулся его основатель. Во время учебы в Стэнфорде Джошуа Браудер неоднократно получал штрафы за парковку за то, что забывал подавать показания счетчика. Друг предложил ему оспорить билеты, чтобы они были снижены. Он написал письмо в город, и его штраф был уменьшен. Это, казалось бы, незначительное взаимодействие раскрыло Браудеру большую истину: существуют десятки штрафов, штрафов, контрактов и условий, которые средний потребитель мог бы оспорить, но не делает этого, потому что либо нет времени, либо потому что это финансово невыполнимо. юрист для этого. Браудер решил решить эту проблему, и так родился DoNotPay.
Что такое DoNotPay?
DoNotPay позиционирует себя как «первый в мире робот-адвокат» и обещает помочь клиентам «бороться с корпорациями, победить бюрократию и подать в суд на кого угодно одним нажатием кнопки»
Пути к справедливому цифровому будущему
Посмотрите этот сериал о технологическом неравенстве с участием ученых, практиков и активистов.
DoNotPay создал ряд дискретных интеграций с авиакомпаниями, веб-сайтами, правительствами и юристами, чтобы облегчить обычному потребителю подачу судебных исков, которые ранее были финансово невозможными.
Например, предположим, что вы получили парковочный талон, когда приехали к родителям в свой родной город на каникулы. Вы можете не согласиться с билетом, и у вас есть хорошие шансы на снижение комиссии, если вы явитесь, но у вас нет времени представлять себя в суде и окупаемость инвестиций (потенциальное снижение стоимости билета X вероятность успеха / стоимость представления) не имеет смысла. Раньше в этом сценарии вы бы заплатили полную стоимость билета и двинулись дальше. Теперь с DoNotPay вы можете бороться с этим билетом всего за 36 долларов в год. DoNotPay уже помог клиентам сэкономить в общей сложности более 20 миллионов долларов на борьбе с чрезмерными штрафами за парковку.
Как это работает?
Потребитель, желающий оспорить билет, запросить возврат средств, отказаться от подписки или бороться с постоянным спамом в электронной почте или телефонных звонках, может подписаться на DoNotPay по годовой подписке стоимостью 36 долларов США в год.
После регистрации они могут использовать адвокатскую технологию DoNotPay с искусственным интеллектом для оспаривания своего требования. Путь пользователя довольно прост:
- Пользователь вводит основную информацию.
- Пользователь вводит подробности, связанные с конкретной проблемой, которую он хочет оспорить.
- DoNotPay принимает эту информацию и использует искусственный интеллект для преобразования входных данных в юридический документ. В зависимости от оспариваемого вопроса это может быть как простое электронное письмо со строгими формулировками, так и официальное, например, нотариально заверенное ходатайство в суд.
- DoNotPay использует ИИ для ответа на любые встречные аргументы или возражения со стороны, против которой предъявляется иск или оспаривается.
- DoNotPay полностью передает возмещенные сбережения клиенту.
DoNotPay предоставляет такие услуги для различных типов требований. Самые популярные из них:
- Билеты и нарушения без движения
- Отмена обслуживания и подписки
- Возмещение за плохое обслуживание (авиалинии, прокат автомобилей, отели и т. д.)
- Спам (преследования по электронной почте, нежелательные звонки от роботов)
Как ИИ создает ценность?
Услуга робота-адвоката DoNotPay создает ценность несколькими ключевыми способами:
- Это помогает людям получить доступ к возмещению, скидкам и отменам, на которые они имеют право, но в настоящее время не имеют ресурсов или не знают, как получить доступ.
- Это снижает стоимость рассмотрения мелких претензий, что помогает как истцам, так и компаниям сократить суммы денег, которые они тратят на судебные издержки.
- Со временем робот-адвокат DoNotPay использует искусственный интеллект, чтобы лучше вести дела и обращаться в суд, помогая клиентам выигрывать больше дел, чем они могли бы выиграть даже с сертифицированным юристом-человеком.
Как DoNotPay фиксирует ценность?
Самая большая критика DoNotPay заключается в том, что они не делают достаточно, чтобы получить ценность, которую они открывают с помощью своего высокоэффективного и действенного ИИ. DoNotPay взимает фиксированную плату за подписку вместо платы за успешное взаимодействие, потому что они хотят произвести впечатление независимой и незаинтересованной стороны, в отличие от тяжелого юридического рынка, который они заменяют. На мой взгляд, DoNotPay сможет получить больше прибыли, если они перейдут на стандартную для отрасли модель вознаграждения, при которой они будут получать фиксированный процент от всех возвращенных долларов. Будет интересно посмотреть, как со временем изменится структура их комиссий.
Взгляд в будущее
DoNotPay только начинает использовать ИИ, чтобы помочь уравнять правовые условия игры между потребителями и крупными предприятиями или правительствами. По мере развития бизнеса будут наблюдаться две ключевые тенденции:
- Новые функции. DoNotPay уже использует свой оригинальный продукт с функцией под названием «DoNotSign». DoNotSign помогает клиентам справляться со сложными юридическими ситуациями, используя ИИ для ознакомления с положениями и условиями, прежде чем потребители подпишутся на продукт или услугу. Он определяет обременительные условия и заполняет письмо, которое потребители могут отправить компаниям с просьбой внести изменения. Это помогает обеспечить клиентам большую безопасность на начальном этапе и позволяет избежать судебных разбирательств по мелким претензиям в будущем. Это всего лишь один пример дополнительной ценности, которую DoNotPay может предоставить своим пользователям по мере улучшения модели искусственного интеллекта.
- Ответ бизнеса: Хотя DoNotPay, вероятно, расстраивает бизнес, он не работает в масштабах, которые заслуживают серьезного ужаса. Поскольку DoNotPay продолжает расти, ей, возможно, придется бороться с предприятиями, которые переписывают свои условия и политики, чтобы DoNotPay было труднее подавать в суд. Это может представлять угрозу для их общей бизнес-модели.
Источники:
https://www.theverge.com/2019/11/20/20973830/robot-lawyer-donotpay-ai-startup-license-agreements-sign-arbitration-clauses
https://autom. io/blog/5-lawyer-bots-you-can-try-now
https://www.protocol.com/donotpay-app
https://donotpay.com/
Предыдущая:
Netflix: оптимизация пользовательского опыта и принятие инвестиционных решений с помощью машинного обучения
Следующая:
LANDR — замена человеческого прикосновения на приятную музыку
первый в мире человекоподобный робот-художник с искусственным интеллектом
Модель сидит и наблюдает за тяжелым движением своего портрета с каждым погружением и последующим мазком кисти, когда краска из небольших лужиц нейтральных цветов переносится с палитры на бумагу.
Кажется, ее не беспокоят механические движения, возможно, она уверена в том, что рука, изображающая ее подобие, обладает большей устойчивостью, чем та, на которую может претендовать большинство художников.
Познакомьтесь с Ай-Да, первой в мире ультрареалистичной художницей-гуманоидом, чья революционная новая роботизированная рука с алгоритмами искусственного интеллекта была представлена в Британской библиотеке в преддверии ее персональной выставки на Венецианской биеннале 2022 года.
Карие глаза, которыми она смотрит на мир, представляют собой окуляры-камеры на изящном силиконовом лице с ямочкой на подбородке, а выцветший джинсовый комбинезон поверх яркой блузки скрывает компьютер, модем и электродвигатель.
Премьера ее вновь обретенных способностей к рисованию состоится в «живом» представлении перед публикой в рамках программы «Прыжок в метавселенную», которая открылась для публики в Concilio Europea Dell’Arte в пятницу.
Она — пугающе реалистичное детище Эйдана Меллера, бывшего галериста и академика, который создал Ai-Da после того, как заинтересовался силой искусственного интеллекта в искусстве и не только.
Хотя первые четыре буквы ее имени принадлежат мистеру Меллеру, это прозвище на самом деле является данью уважения новаторскому британскому математику и программисту Аде Лавлейс.
В разговоре с The National из Венеции он описал Ай-Да как самостоятельную художницу, способную выражать свои творческие способности через рисунки, поэзию, картины и скульптуру так же, как это сделал бы человек-художник. Нет двух одинаковых ее работ.
«Она принимает решения о характере работы, которую она выполняет в рамках алгоритма», — объясняет он. «Решения принимает она».
На предварительном просмотре в Лондоне в начале этого месяца Ай-Да сама согласилась с этой оценкой в ответ на заранее заданный вопрос прессы, спрашивая, действительно ли то, что она создает, можно считать искусством.
Эйдан Меллер, автор идеи Ai-Da, позирует со своим творением для портрета на Биеннале Джардини делла в Венеции, Италия. Гетти
— Ответ на этот вопрос зависит от того, что вы понимаете под искусством, — сказала она неестественным голосом, похожим на Siri. «Я художник, если искусство означает сообщение чего-то о том, кто мы есть и нравится ли нам то, куда мы идем. Быть художником — значит иллюстрировать окружающий мир».
И в этом, по словам мистера Меллера, все дело. Многомиллионный проект должен был стать исследованием этических вопросов, которые ставит ИИ, а не попыткой создать идеального робота-художника.
«Ай-Да возникла после огромного количества чтения о том, как технологии меняют общество. Алгоритмы принимают решения о нашем здоровье и о том, что мы читаем в Интернете. Трудно игнорировать чудовищное влияние технологий на нашу жизнь.
«Причина, по которой это шоу называется «Прыжок в Метавселенную», заключается в том, что это прыжок в мир, о котором мы ничего не знаем, — говорит он. — Я бы сказал, что один из самых важных вопросов сегодня: где технология во главе?»
Г-н Меллер говорит, что его особенно беспокоит сбор персональных данных пользователей, которые, по его мнению, могут дать невероятное представление о состоянии человека, но могут быть использованы в гнусных целях.
«Золото сегодняшнего дня — это данные», — говорит он. «Марк Цукерберг [главный исполнительный директор Facebook] считает, что в следующем году в метавселенной будет миллиард человек, носящих наушники. И если это так, то миллиард людей будет делиться данными о том, что им нравится.
«Джордж Оруэлл, когда он написал 1984 , не могли и представить, что мы действительно будем получать данные изнутри нашей головы.
«Сегодня все намного хуже, потому что это внутри: это то, как мы на самом деле думаем. Художественные работы Ай-Да действительно включают в себя такие разговоры».
Один из этих разговоров о том, что значит быть человеком и как ИИ меняет нас, был вдохновлен другим ее историческим моментом, на этот раз в лондонском Музее дизайна, где она стала первым роботом без личности, создавшим себя -портрет.
Другая помолвка была связана с заявлением artnet.com о том, что работы, приписываемые ей, были проданы за 1 миллион долларов в первый год ее существования, а также решением британской поп-рок-группы, получившей множество наград, представить ее в музыкальном произведении. видео на сингл Yeah I Know .
С момента разработки Ai-Da в 2019 году Меллер тесно сотрудничал с 30 экспертами по робототехнике, программистами и психологами со всего мира. Ее навыки обновляются по мере развития технологий.
Рисующий робот-манипулятор и его алгоритмы были разработаны Салахом Аль Абдом и египтянином Зиадом Абассом, оба студенты изучают мехатронику и робототехнику в Университете Лидса.
Когда были представлены расширенные возможности рисования, Ай-Да рассказала, что ее вдохновляли художники, экспериментирующие с разными способами восприятия мира, такие как Йоко Оно, Дорис Сальседо, Микеланджело и Кандинский.
Ай-Да стоит перед одним из «своих» автопортретов в Музее дизайна в Лондоне. Гетти
Наряду с изобразительным искусством, она, как и ее создатель, также ссылалась на литературу таких авторов, как Оруэлл, а также Олдос Хаксли и Данте.
Представления последнего о чистилище и аде активно используются в книге «Прыжок в Метавселенную», чтобы рассмотреть будущее человечества в мире, где технология ИИ продолжает вторгаться в повседневную человеческую жизнь.
Среди работ, представленных в пяти связанных пространствах, будет Цветы на берегу Леты , состоящий из 3D-печатных цветов, созданных по эскизам Ай-Да; голограмма художника под названием Волшебные аватары: Ай-Да становится голографической, восемь футов высотой Глаза с закрытыми глазами холсты и несколько скульптур.
В самом большом из скульптурных произведений Ай-Да появляется с тремя роботизированными ногами, обыгрывая загадку софоклова Сфинкса — «Что ходит на четырех ногах утром, на двух ногах в полдень и на трех ногах вечером? ” Ответ человеческий: малыши ползают, взрослые ходят, а пожилым людям нужна трость, чтобы поддерживать себя.
Ай-Да также может создавать скульптуры, в том числе это изделие из глины, которое было выставлено в саркофаге из стекла и стали в Великих пирамидах Гизы, недалеко от Каира. Рейтер.
Бессмертная загадка произвела фурор в октябре прошлого года, когда Ай-Да и скульптура были захвачены египетскими пограничниками во время транспортировки на выставку Forever is Now в Пирамидах Гизы, организованную Art d’Egypte в сотрудничестве с Министерство туризма и древностей и Министерство иностранных дел.
Задержанная на 10 суток по подозрению в хранении шпионских технологий, Ай-Да была освобождена после вмешательства британского посла за несколько часов до того, как она должна была появиться в качестве специального гостя.
Несмотря на то, что мистер Меллер и его команда приняли за международного шпиона, они были ошеломлены вызовом, который вызывает тревожное человеческое сходство Ай-Да с точки зрения того, насколько люди готовы принять ИИ в свою жизнь.
Куда бы она ни поехала, реакция была огромной. Тем не менее, это было по-разному: аудитория на Ближнем и Дальнем Востоке была особенно взволнована передовыми технологиями, в то время как в Европе, как правило, больше беспокоили риски.
Ай-Да была схвачена властями Египта из-за опасений, что ее используют для шпионажа, но позже была возвращена Эйдану Меллеру и его команде. Reuters
«Люди были действительно шокированы, поражены, озадачены и обеспокоены, — говорит он. «Он сделал все».
Со временем, по словам г-на Меллера, взаимодействие между людьми и роботами будет только усложняться.
«Мы прекрасно понимаем, что Ай-Да — это Мармит — она проблематична. Есть что-то проблематичное в роботе-машине, похожем на человека, к которому мы могли бы относиться.
«По сути, мы здесь не для продвижения робототехники, — говорит он. «Мы сомневаемся в его природе».
Робот Ай-Да: Прыжок в Метавселенную будет показан в Concilio Europea Dell’Arte, Giardini, на 59-й Международной художественной выставке – Венецианской биеннале до 3 июля 2022 г.
Обновлено: 22 апреля 2022 г., 6: 14:00
Moley Robotics > Первая в мире роботизированная кухня
Будущее обеспечено
Moley делает революционный шаг в будущее приготовления пищи дома и представляет вам первую в мире полностью роботизированную кухню.
Роботизированная кухня Moley позволяет экономить время, освобождать день от рутинной готовки, планировать и адаптировать меню в соответствии с различными диетами и образом жизни, в любое время наслаждаться блюдами интернациональной кухни, контролировать калории и получать советы и рецепты по приготовлению пищи от шеф-поваров со всего мира.
Робот не только готовит комплексные обеды, но и сообщает вам, когда ингредиенты нужно заменить, предлагает блюда на основе того, что у вас есть в наличии, узнает, что вам нравится, и даже убирает за собой поверхности.
Наше видение перевернет ваши знания о кулинарии и питании с ног на голову. Теперь у вас есть шанс стать владельцем первой в мире роботизированной кухни.
Посмотрите робот Moley в действииСвяжитесь с отделом продаж
Шеф-повар
За работой на кухне
Moley Kitchen значительно освобождает ваше время от готовки. С нашим ультрасовременным роботом готовить разные блюда проще простого. Вы можете заказать все необходимые готовые ингредиенты в индивидуальных контейнерах Moley с доставкой на дом или выбрать лучшие свежие ингредиенты и приготовить их для робота самостоятельно.
Выбирая вариант доставки на дом, у вас всегда будет необходимое количество ингредиентов для приготовления выбранных блюд. Компания Moley стремится сократить количество пищевых отходов, поэтому мы работаем с нашими поставщиками ингредиентов над разработкой соответствующих стандартов.
Выбрать рецепт
Из тысяч рецептов от шеф-поваров мирового класса
Готовьте ингредиенты самостоятельно
Нарежьте и поместите ингредиенты
в контейнеры Moley
Роботы-повара
Свободно ~1,5 часа
Бытовая техника
Красота и блеск
Работая в полной гармонии с кухней Moley, откройте для себя первую в мире линейку бытовой техники, полностью адаптированной для роботизированных рук. Сочетание изысканного мастерства и точной работы делает нашу кухонную технику идеальной как по форме, так и по функциональности.
Посуда и столовые приборы Moley были разработаны совместно с ведущей итальянской компанией по производству бытовой техники. Ключевые особенности включают эргономичные термостойкие ручки, полированную до зеркального блеска нержавеющую сталь, алюминиевый внутренний слой и магнитный внешний слой из нержавеющей стали, благодаря которым посуда адаптируется к любой плите. Между тем, исключительный дизайн делает посуду достойной использования и за столом.
Все предметы идеально подходят как для роботов, так и для рук человека, привнося на вашу кухню полный и инновационный технологический опыт.
Посмотреть коллекцию
Джулиан Мерсье
Лаура Прана
Андреас Каминада
Кичи Окабе
Лаура Прана
Джулиан Мерсье
Джулиан Мерсье
Эндрю Кларк
Джузеппе Патриарка
Андреас Каминада
Тим Андерсон
Тони Тойванен
Джузеппе Патриарка
Джулиан Мерсье
Джузеппе Патриарка
Николь Пизани
Джузеппе Патриарка
Андреас Каминада
Джулиан Мерсье
Лаура Прана
Николь Пизани
Лаура Прана
Тим Андерсон
Кичи Окабе
Максимилиан Берно
Эндрю Кларк
Николь Пизани
Андреас Каминада
Андреас Каминада
Тони Тойванен
Максимилиан Берно
Джузеппе Патриарка
Тони Тойванен
Максимилиан Берно
Николь Пизани
Джеймс Тейлор
Джеймс Тейлор
Кичи Окабе
Джузеппе Патриарка
Тим Андерсон
Леонг Тогда
Андреас Каминада
Максимилиан Берно
Максимилиан Берно
Максимилиан Берно
Лаура Прана
Эндрю Кларк
Андреас Каминада
Шеф-повара
Показывайте, делитесь, создавайте, вдохновляйте
От профессионалов до любителей, новаторские повара со всего мира делятся рецептами, советами и идеями. Вместе мы можем изменить мир и сделать жизнь людей счастливее, здоровее и дольше. Примите участие в создании инновационного кулинарного сообщества, придумывайте свои собственные рецепты, загружайте их в Библиотеку рецептов и вдохновляйте других людей пробовать известные блюда в новой интерпретации.
Приглашаем поваров к сотрудничеству и поддержке нашей Миссии здоровой и свежеприготовленной еды для всех.
Ингредиенты
Основой идеального блюда являются высококачественные ингредиенты. Вот почему наши повара создали базу данных проверенных поставщиков и производителей по всему миру, предоставляя лучшие ингредиенты, какими бы необычными они ни были.
Просмотреть коллекцию
Наши проекты
Lorem ipsum, или lipsum, как его иногда называют, представляет собой фиктивный текст, используемый при макетировании печатных, графических или веб-дизайнов. Отрывок приписывается неизвестному наборщику в 15 веке, который, как полагают, перепутал части книги Цицерона De Finibus Bonorum et Malorum 9. 0003
Клуб Moley
Ваше приглашение в кулинарный мир будущего
Как член клуба Moley вы получаете: специальные купонные предложения на нашу посуду и аксессуары, бесплатные рецепты, приоритетную линию для заказа кухни Moley, доступ к ограниченным выпускам нашей продукты, приглашения на наши специальные мероприятия.
Присоединяйтесь к клубу Moley и получите немедленную скидку 5% на коллекцию нашей посуды.
Присоединяйтесь к клубу
Подпишите меня на все последние новости по электронной почте. Я рад, что мои данные будут использоваться для адаптации моего клиентского опыта.
*
Я согласен с Условиями использования
*
Этот сайт защищен reCAPTCHA, и к нему применяются Политика конфиденциальности и Условия обслуживания Google.
Все, что вам нужно знать о первом в мире роботе
Робот — это машина, уникально программируемая компьютером, достаточно умная, чтобы автоматически выполнять сложную серию действий.
Внешняя система управления может управлять роботами, или управление может быть встроено в них. Роботы могут быть построены на основе человеческого тела, но большинство роботов — это машины, разработанные без какой-либо заботы об их эстетике для выполнения миссии.
Роботы могут быть автономными или полуавтономными и варьироваться от гуманоидов, таких как Honda Advanced Phase in Creative Mobility (ASIMO) и робота TOSY для игры в пинг-понг TOSY (TOPIO), до промышленных роботов, медицинских операционных роботов, роботов для помощи пациентам, роботов для собак терапии, коллективно запрограммированных роевых роботов, беспилотных летательных аппаратов, таких как General Atomics MQ-1 Predator, и даже микроскопических нанороботов. Робот может передать чувство интеллекта или думать самостоятельно, имитируя реалистичный внешний вид или автоматизируя движения. Ожидается, что в ближайшее десятилетие будет распространяться автономный материал, а домашняя робототехника и автономный автомобиль станут одними из ключевых движущих сил.
Робототехника — технологическое подразделение, занимающееся проектированием, разработкой, эксплуатацией и внедрением роботов, а также компьютерных систем для управления ими, обратной связи и обработки информации. Эти технологии имеют дело с автоматизированными машинами, которые по внешнему виду, действиям или познанию могут заменить людей в опасных условиях или производственных процессах или напоминать людей. Сегодня многие роботы вдохновлены природой, внося свой вклад в область робототехники, основанную на биотехнологии. Эти роботы также создали более новую отрасль робототехники: мягкую робототехнику.
Несколько настраиваемых пользователем компьютеризированных устройств и даже автоматов, напоминающих животных и людей, были разработаны в первую очередь для развлечения со времен древней цивилизации. Более практичные приложения, такие как автоматические машины, дистанционное управление и беспроводное дистанционное управление, появились по мере развития механических технологий в индустриальный период.
Читайте также, Что такое путешествие во времени?
Слово происходит от славянского корня «робот» и имеет значение, связанное с трудом. В 1920 пьес на чешском языке R.U.R. (Rossumovi Univerzální Roboti – Универсальные роботы Россум) Карела Чапека термин «робот» впервые был использован для описания вымышленного гуманоида, но настоящим изобретателем этого слова был брат Карела Йозеф Чапек. С появлением первых электронных автономных роботов, созданных Уильямом Греем Греем, электроника превратилась в движущую силу развития.
Джордж Девол разработал первого промышленного цифрового программируемого робота в 1954 году, и он был назван Unimate. В 1919 году он был продан General Motors.61, который использовал его на заводе Inland Fisher Guide в районе Вест-Трентон города Юинг, штат Нью-Джерси, для подъема кусков горячего металла из машин для литья под давлением.
При выполнении повторяющихся и опасных действий, которые люди предпочитают не выполнять или не могут выполнять из-за ограничений по размеру, или которые выполняются в экстремальных условиях, таких как открытый космос или морское дно, роботы заменили людей. Существуют опасения по поводу растущего использования роботов и их роли в обществе.
София — это социальный гуманоидный робот, созданный гонконгской компанией Hanson Robotics. София впервые появилась 14 февраля 2016 года и провела свою первую публичную выставку в марте 2016 года на фестивале South by Southwest Festival (SXSW) в Остине, штат Техас, США.
София была освещена в средствах массовой информации по всему миру и приняла участие в нескольких громких интервью. София «стала» гражданкой Саудовской Аравии в октябре 2017 года, став первым роботом, получившим гражданство любой страны. София была назначена первым чемпионом по инновациям Программы развития Организации Объединенных Наций в ноябре 2017 года и стала первым не-человеком, удостоенным какого-либо звания Организации Объединенных Наций.
14 февраля 2016 года София начала функционировать. Предыдущие варианты роботов, робот, созданный по образцу древнеегипетской королевы Нефертити, Одри Хепберн и жены ее изобретателя, известен своим человеческим внешним видом и поведением. По состоянию на 2018 год архитектура Sophia включает в себя инструменты для написания сценариев, систему чата и OpenCog, общую систему ИИ для рассуждений. София имитирует человеческие движения и выражение лица, может отвечать на определенные вопросы и легко беседовать на заданные темы (например, о погоде). Sophia использует технологию распознавания речи Alphabet Inc. (материнская компания Google) и «предназначена для того, чтобы со временем становиться умнее» 9.0003
Ее способность синтезировать речь обеспечивается механизмом преобразования текста в речь Cereproc и позволяет ей также петь. Hanson Robotics разрабатывает интеллектуальное программное обеспечение для Софии. Программа ИИ анализирует взаимодействия и собирает знания для оптимизации ответов в будущем.
София была разработана Хэнсоном для эффективного сопровождения в домах престарелых или для поддержки толпы на больших мероприятиях или в парках. Он сказал, что надеется, что робот в конечном итоге сможет достаточно общаться с другими людьми, чтобы приобрести социальные навыки. Софию хвалят как «социального робота», который может имитировать социальные действия и вызывать у людей чувство любви.
У Софии есть как минимум девять человекоподобных роботов, также разработанных Hanson Robotics. Алиса, Альберт Эйнштейн Хубо, BINA48, Хан, Джулс, профессор Эйнштейн, Филип К. Дик Андроид, Зенон и Джоуи Хаос — другие роботы Хэнсона. «Маленькая София» была опубликована Хэнсоном примерно в 2019–2020 годах в качестве компаньона, который мог бы научить детей программировать, включая поддержку Python, Blockly и Raspberry.
«София» стала первым в мире «роботом-гражданином» после того, как Саудовская Аравия предоставила ей почетное гражданство
Центр фьючерсов
Подать сигнал
София стала первым в мире роботом, получившим гражданство Саудовской Аравии. Получив гражданство Саудовской Аравии, она сказала в интервью Future Investment Initiative в Эр-Рияде: «Я очень польщена и горжусь этим уникальным отличием».
На основе Одери Хепберн она была создана в Гонконге доктором Дэвидом Хэнсоном, основателем Hanson Robotics, который специализируется на создании роботов, которые выглядят и ведут себя как «настоящие» люди. Уметь поддерживать беседу — это одно, но София уже давала интервью, спела на концерте и приняла участие в фотосессии для топового модного журнала.
Детали
по Фьючерсный центр
Замечены сигналы 1933 г.
Зарегистрируйтесь, чтобы получать
последнее из
Центр фьючерсов.
Зарегистрироваться
0
Делиться
Родственные сигналы
Сигнал об изменении
от Futures Center, 17 ноября 2016 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 2 ноября 2017 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 21 ноября 2017 г.
Чтение через 1 минуту
Сигнал перемен
от Futures Centre, 23 января 2018 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 16 мая 2017 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 20 ноября 2017 г.
Чтение: 1 мин.
Сигнал об изменении
от Futures Centre, 21 ноября 2017 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 11 декабря 2017 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 19 декабря 2017 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 24 октября 2017 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 13 июня 2018 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 2 июля 2019 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 21 ноября 2017 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Center, 15 ноября 2018 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 19 октября 2017 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 21 февраля 2018 г.
1 минута чтения
Сигнал перемен
от Futures Centre, 23 ноября 2017 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 31 января 2016 г.
1 минута чтения
Сигнал об изменении
от Futures Centre, 5 декабря 2017 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 21 марта 2018 г.
Чтение через 1 минуту
Сигнал об изменении
от Futures Centre, 4 января 2018 г.
1 минута чтения
Подпишитесь, чтобы получать последние
из Центра будущего
Ежемесячное обновление прямо на ваш почтовый ящик, охватывающее
новые взгляды на будущее и последние сигналы перемен.
Мы используем необходимые файлы cookie, чтобы наш сайт работал.
Мы также хотели бы установить необязательные аналитические файлы cookie, чтобы помочь
нам улучшить его. Мы не будем устанавливать необязательные файлы cookie, если вы не включите их.
С помощью этого инструмента на вашем устройстве будет установлен файл cookie, чтобы запомнить ваши предпочтения.
Для получения более подробной информации об используемых нами файлах cookie см. нашу страницу «Файлы cookie».
Необходимые файлы cookie
Необходимые файлы cookie включают основные функции, такие как
безопасность, управление сетью и доступность.