Содержание
ЯНДЕКС БЕСПИЛОТНЫЕ ТЕХНОЛОГИИ | Участник проекта «Сколково»
ОБЩЕСТВО С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «ЯНДЕКС БЕСПИЛОТНЫЕ ТЕХНОЛОГИИ»
О компании
Яндекс разрабатывает систему автономного управления с 2017 года. Эта система позволяет автомобилям и другим транспортным средствам перемещаться без участия человека, соблюдая правила дорожного движения и объезжая препятствия, а также планировать маршрут с учетом действий других участников движения. В парке Яндекса есть беспилотные автомобили на базе Toyota Prius и Hyundai Sonata. Они ездят по дорогам общего пользования России, США и Израиле и проехали уже миллионы километров в автономном режиме. Помимо беспилотных автомобилей, линейка автономных продуктов Яндекса также включает самоуправляемого робота-доставщика для перевозки небольших грузов — он называется Яндекс.Ровер.
И беспилотные автомобили, и роботов-доставщиков можно встретить на территории Сколково. В 2018 году инновационный центр стал одной из первых локаций, где в тестовом режиме запустилось беспилотное такси Яндекса. В 2020 году в городе начал работать Яндекс.Ровер, который развозит различные отправления по территории Сколково.
В 2020 году в городе начал работать Яндекс.Ровер, который развозит различные отправления по территории Сколково.
ЦифровойКонтакт-Центр
ЦифровойКонтакт-Центр
Проекты
Бизнес-модель
Бизнес для Бизнеса (B2B)
Описание проекта
Беспилотные автомобили и роботы-доставщики Яндекса в будущем могут применяться для различных задач: от сервисов роботакси до автономной доставки на последней миле. Внедрение беспилотного транспорта поможет удовлетворить растущий спрос в сегменте пассажироперевозок и логистики, а также сделает дороги более безопасными. На текущий момент запущено 179 беспилотных автомобилей и реализовано коммерческое внедрение роботов-доставщиков.
Сайт проекта: https://sdc.yandex.com
Руководитель
ПОЛИЩУКДМИТРИЙАЛЕКСАНДРОВИЧ
ГЕНЕРАЛЬНЫЙ ДИРЕКТОР
Интеллектуальная собственность
| 2022 год | |
Изобретение 2767826 СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | |
Изобретение 2764479 СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ САМОУПРАВЛЯЕМОГО АВТОМОБИЛЯ | |
Изобретение 2775817 СПОСОБ И СИСТЕМА ДЛЯ ОБУЧЕНИЯ АЛГОРИТМА МАШИННОГО ОБУЧЕНИЯ С ЦЕЛЬЮ ОБНАРУЖЕНИЯ ОБЪЕКТОВ НА РАССТОЯНИИ | |
Изобретение 2781619 СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | |
Изобретение 2770239 СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ТРАНСПОРТНОГО СРЕДСТВА ЧЕРЕЗ СЛЕПУЮ ЗОНУ | |
Изобретение 2775791 СИСТЕМА И СПОСОБ ОЧИСТКИ ПОВЕРХНОСТИ СЕНСОРА НА БЕСПИЛОТНОМ АВТОМОБИЛЕ | |
Изобретение 2778300 СПОСОБ И СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ МАНЕВРА ОБЪЕКТА | |
Изобретение 2769921 СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | |
Изобретение 2767831 СПОСОБЫ И ЭЛЕКТРОННЫЕ УСТРОЙСТВА ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ОКРУЖЕНИИ БЕСПИЛОТНОГО АВТОМОБИЛЯ | |
Изобретение 2778387 СИСТЕМЫ И СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | |
Изобретение 2767949 СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ КАЛИБРОВКИ НЕСКОЛЬКИХ ЛИДАРНЫХ ДАТЧИКОВ | |
Изобретение 2767838 СПОСОБЫ И СИСТЕМЫ ДЛЯ ФОРМИРОВАНИЯ ОБУЧАЮЩИХ ДАННЫХ ДЛЯ ОБНАРУЖЕНИЯ ГОРИЗОНТА И ПЛОСКОСТИ ДОРОГИ | |
Изобретение 2778383 ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ ОБНАРУЖЕНИЯ | |
Изобретение 2767955 СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | |
Изобретение 2775823 СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ ЛИДАРОВ | |
Изобретение 2764223 СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ СВЕТОФОРА | |
| 2021 год | |
Изобретение 2744012 СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | |
Изобретение 2757234 СПОСОБ И СИСТЕМА ДЛЯ ВЫЧИСЛЕНИЯ ДАННЫХ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ БЕСПИЛОТНОГО АВТОМОБИЛЯ | |
Изобретение 2750152 СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ ПОРЯДКА ОЦЕНИВАНИЯ ТРАЕКТОРИЙ ТРАНСПОРТНЫХ СРЕДСТВ | |
Изобретение 2752016 ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | |
Изобретение 2762744 СПОСОБЫ И СИСТЕМЫ ОБНАРУЖЕНИЯ С ПОМОЩЬЮ ЛИДАРА (LIDAR) С ВОЛОКОННО-ОПТИЧЕСКОЙ МАТРИЦЕЙ | |
Изобретение 2742323 СПОСОБ И КОМПЬЮТЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО СМЕЩЕНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | |
Изобретение 2750118 СПОСОБЫ И ПРОЦЕССОРЫ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ БЕСПИЛОТНОГО АВТОМОБИЛЯ | |
Изобретение 2757037 СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ НАЛИЧИЯ КОЛЕИ НА ТЕКУЩЕЙ МЕСТНОСТИ | |
Изобретение 2757038 СПОСОБ И СИСТЕМА ДЛЯ ПРЕДСКАЗАНИЯ БУДУЩЕГО СОБЫТИЯ В БЕСПИЛОТНОМ АВТОМОБИЛЕ (SDC) | |
Изобретение 2743895 СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ОБЪЕКТОВ | |
Упоминание в СМИ
https://sdc. yandex.com
yandex.com
Официальный сайт
05.05.2022sk.ru
Когда личный автомобиль станет никому не нужен
Информация о компании
Учредители
ЧАСТНАЯ КОМПАНИЯ С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «ЯНДЕКС СЕЛФ ДРАЙВИНГ Б.В.»
99,9%
ЧАСТНАЯ КОМПАНИЯ С ОГРАНИЧЕННОЙ ОТВЕТСТВЕННОСТЬЮ «ЯНДЕКС СЕЛФ ДРАЙВИНГ ХОЛДИ НГ Б.В.»
0,1%
Уставный капитал
100 000 ₽
121205, ГОРОД МОСКВА, Б-Р БОЛЬШОЙ (СКОЛКОВО ИННОВАЦИОННОГО ЦЕНТРА, Д. 42, СТР. 1, ПОМЕЩ. 1131 ЭТАЖ 3
Похожие компании
Энерготех
БИПИЭМТИМ
Bpm Smart Energy — нативная система управления предприятиями Топливно Энергетического Комплекса
ГИТ
RED MULE
ГРИНДАТА
Интеллектуальная многомодульная платформа GreenData для создания BPM-приложений для финансовых институтов
ГРУППА КОМПАНИЙ ВЕСТЛИНК
LYNKAGE – интеллектуальная AI платформа для бесшовного объединения компонентов корпоративной инфраструктуры с целью повышения скорости принятия эффективных бизнес-решений
Промтех
МИКРОЛАЗЕР
ТЕХНОЛОГИЯ ОБЪЕМНОЙ МАРКИРОВКИ АЛМАЗОВ НЕВИДИМЫМИ МЕТКАМИ НА ОСНОВЕ ЛАЗЕРНО-ИНДУЦИРОВАННЫХ НАНОРАЗМЕРНЫХ ДЕФЕКТОВ КРИСТАЛЛИЧЕСКОЙ РЕШЕТКИ
Биомедицина
ПО ГЭОТАР
Гибридный стоматологический симулятор для формирования мануальных навыков «Леонардо»
БИЗНЕС-АНАЛИТИКА
Roistat
МЕРЧЕРРИ
«Мерчерри» — проект уберизации мерчендайзинга
Биомедицина
ЛАБОРАТОРИЯ ИМ.
 В.А. БУРЦЕВА
В.А. БУРЦЕВА
Разработка настольного
рентгеновского
наномикроскопа для
исследования клеточных
культур и нанообъектов
ЭЛЕКТРОННЫЕ ПЛАТФОРМЫ
Экзамус
Промтех
ПДТ
Пульсирующий детонационный двигатель
НАНОРЕЛЬЕФ ДИСПЛЕЙ
Фазированный лидар
Биомедицина
ДМО
«Доктис»
Энерготех
АЭРОГАЗ
Интеллектуальный блок входного манифольда с саморегулируемой эжекторно-сепарационной системой для повышения дебета низконапорных скважин газоконденсатных месторождений
Энерготех
АДДИТИВ ПРОДАКШН ГРУПП
Разработка системы струйной 3D печати
Энерготех
КАР СИСТЕМС
Электронная выхлопная AVAS-система для повышения эффективности и безопасности электротранспорта
Энерготех
ЦЕНТРОБЕЖНЫЕ МАШИНЫ
Высокоэффективные рабочие колеса и элементы проточной части лопастных машин для перемещения жидкостей и газов
Промтех
АКВАБРИЗЕР
AQUABREATHER HYDROID – инновационный дыхательный аппарат для рекреационного, спортивного и технического дайвинга.
Биомедицина
КЬЮ ЭМ ФАРМА
Позитивные аллостерические модуляторы глутаматных рецепторов для терапии аффективных расстройств и когнитивных нарушений
Промтех
РЕДСИСТЕМС
Система диагностики и предиктивной аналитики состояния энергетических установок REDSystems
ИЦ САМОЦВЕТ
Информационная система мониторинга безопасности обгона
Энерготех
ФЭСКОМ
Технология агрегированного управления распределенной электрической нагрузкой (малой мощности) на централизованную электрическую сеть.
Биомедицина
АТФ
AgroTechFarm — Разработка и производство инновационной вертикальной фермы на основе аэропоники для круглогодичного выращивания в закрытых помещениях натуральных продуктов
Биомедицина
АИСТАГРО
Автоматизированная агроквалиметрическая система управления сельскохозяйственным производством на основе онтологического инжиниринга
Энерготех
КРОНОС
Внедрение технологий кастомизации в приборы бытового назначения для увеличения Энергоэффективности.
Энерготех
РУБЕТЕК РУС
Умный дом Rubetek
Энерготех
УТОКС
Стекловолокнистые катализаторы для решения природоохранных задач
Промтех
КОМБЕРРИ
Комплексные технологические решения по формированию тонкопленочных покрытий
ВЕРНСКИЙ
Вернский
Энерготех
НП МОНОКРИСТАЛЛ ПАСТЫ
Разработка и серийное производство паст для изготовления кремниевых солнечных элементов c тыльной диэлектрической пассивацией (PERC).
УНИКАЛЬНЫЕ РОБОТЫ
nopilot — решения по беспилотной доставке еды и посылок на основе технологий машинного обучения
Промтех
МИКРОВОРМЕР
Микроволновый подогреватель-автомат для детского питания с бесконтактным контролем температуры
Энерготех
АЙКЬЮНЕРДЖИ
Система управления энергопотреблением зданий («Айкьюнерджи»)
Биомедицина
ЕВРОБИОХИМ
Биомодифицированные минеральные удобрения
Промтех
ГЛОБАЛ ОРИЕНТ
5G платформа для автономных автомобилей
Биомедицина
ПРИЗМА
Разработка ингибиторов тирозил-ДНК-фосфодиэстеразы 1 для комбинированной химиотерапии онкологических заболеваний
КОГНИТИВ РОБОТИКС
Cognitive Agro Pilot — инновационный программно-аппаратный комплекс для автономного управления с/х техникой в целях сокращения потерь урожая в ходе уборочных работ
Промтех
АГРОГЛОБАЛ ТЕЛЕКОМ
Agroglobal AGN-30
АЙПИНОУТ
Цифровой ассистент IPnote для управления интеллектуальной собственностью
Промтех
СТЕОР — НСБ
Создание пилотной зоны и разработка технических средств е-Навигации. Создание платформы для разработки технологий безэкипажного судовождения
Создание платформы для разработки технологий безэкипажного судовождения
ЛИНСОФТ
Visual Lean
АВТОДОРИЯ
Улей – интеллектуальная транспортная система с мобильными датчиками контроля за дорожной обстановкой
СТАНДАРТПРОЕКТ
«Трафик»: интеллектуальная платформа видеоаналитики и распознавания номеров, марок и типов транспортных средств
Энерготех
БМГ
Моющие и чистящие средства с применением биомикрогелей®
Промтех
ОЭС ПЛАТОВ
Дистанционные датчики зондирования подстилающей поверхности и объектов инфраструктуры с возможностью установки на пилотируемый и беспилотный транспорт
Промтех
СТЗ
АгроСевКонтроль
Биомедицина
НЕЙРОСЭЙФ
NeuroSafe – температурный менеджмент головного мозга для нейропротекции и предотвращения нейродегенерации
СИМВЭЙ
Разработка технологии, программной и аппаратной платформ децентрализованной (пиринговой, Peer to Peer) сети унифицированных коммуникаций.
2И
Технология и устройство подавления встречной засветки при формировании изображения дорожного окружения беспилотного транспортного средства методом фантомных изображений
ЮНИКОМ ТЕЛЕМАТИКС
СитиПоинт
СОРБ ИННОВА
Создание программно-аппаратной платформы Smart Road для построения V2I инфраструктуры
как устроен лидар «Яндекс» для беспилотных автомобилей — Транспорт на vc.ru
В конце ноября 2021 года «Яндекс» заявил, что перевел свой флот беспилотных автомобилей на собственные лидары. Узнали у инженеров компании, почему они решили заняться разработкой своих сенсоров и как это поможет автономному автомобилю.
8882
просмотров
Зачем беспилотным автомобилям нужен лидар
Ключевая задача любого автономного автомобиля — определить, что происходит вокруг него. Машине для планирования своих движений каждую секунду нужно понимать, где находится дорога, знаки, пешеходы, здания, деревья, с какой скоростью двигаются другие автомобили. Собирать такие данные помогают сенсоры, установленные в машине — обычно это камеры, радары и лидары в разных количествах и комбинациях.
Собирать такие данные помогают сенсоры, установленные в машине — обычно это камеры, радары и лидары в разных количествах и комбинациях.
Большинство известных разработчиков автономных машин можно условно поделить на два лагеря: те, кто создаёт беспилотник, используя камеры и радары, и тех, кто использует для этих же целей лидар как основной сенсор.
Наиболее известный сторонник первого лагеря — компания Tesla, алгоритмы которой опираются на данные с радаров и камер, установленных по периметру машины. Разработчики Tesla уверены, что такого набора сенсоров достаточно для создания автономного автомобиля. Компания уже тестирует программное обеспечение, которое позволяет превратить серийные модели электрокара в автономные машины.
В другом лагере находятся такие компании как Waymo (Alphabet), Cruise и «Яндекс». Помимо камер и радаров они оснащают машины еще и лидарами.
У каждого решения есть свои преимущества и недостатки. Камеры стоят дешево и в связке с радарами позволяют сделать автономный транспорт по-настоящему массовым явлением. Однако на качество данных, получаемых с их помощью, зачастую влияют погодные условия, время суток или просто блик от солнца.
Однако на качество данных, получаемых с их помощью, зачастую влияют погодные условия, время суток или просто блик от солнца.
Лидары позволяют получить трехмерную карту окружающего пространства с точными расстояниями до объектов. Сенсор хорошо работает и при плохой погоде и в темное время суток, но его главный недостаток — высокая стоимость.
Облако точек, которое получает лидар Waymo
Зачем компании разрабатывают собственные лидары
Снижение стоимости лидара — одна из причин, по которой компании приходят к решению разрабатывать собственные сенсоры вместо использования сторонних решений. По словам бывшего руководителя Waymo, переход на своё производство может снизить стоимость одного лидара на 90%.
В 2019 году Waymo планировала продавать свои лидары в том числе и другим компаниям. Однако спустя два года решила свернуть проект и сосредоточиться на создании приборов только для собственных нужд.
«Яндекс» не раскрывает стоимость лидара, но говорит о том, что стоимость сборки своего сенсора уже сравнима со стоимостью сторонних — даже с учетом того, что компания сейчас собирает их вручную.
Вторая причина, которая побуждает разработчиков беспилотников заняться собственным производством сенсоров, — данные. Компании, специализирующиеся на разработке лидаров, вроде Velodyne и Luminar, стараются разрабатывать универсальные сенсоры, которые можно встроить в дрон, робота, беспилотный автомобиль или вовсе применять стационарно, например для археологических раскопок.
Беспилотный автомобиль Cruise с лидарами Velodyne на крыше
Такие решения удобно использовать при разработке прототипов или первых партий, однако когда речь заходит о промышленном применении, разработчикам требуется больше сырых необработанных данных и доступ к более глубоким настройкам сенсора, поясняют инженеры «Яндекса».
Как устроены лидары
Принцип работы любого лидара простой. Внутри корпуса находится лазерный излучатель, который отправляет световые импульсы в окружающее пространство. Каждый такой импульс «сталкивается» с объектом — например зданием, автомобилем или камнем на дороге — и возвращается обратно на сенсор лидара.![]() Время, которое луч провел в «путешествии», позволяет вычислить точное расстояние до объекта, от которого отразился импульс.
Время, которое луч провел в «путешествии», позволяет вычислить точное расстояние до объекта, от которого отразился импульс.
Основная сложность в том, что для создания подробной трехмерной карты всего окружения нужно каждую секунду отправлять миллионы импульсов, чтобы получилось плотное облако точек. Для решения этой задачи в индустрии чаще всего используется один из двух вариантов конструкции лидара.
Первый — с вращающейся на 360 градусов установкой из лазеров и сенсоров. Такая конструкция чаще всего встречается в индустрии. Например, их производит компания Velodyne — именно её сенсоры можно увидеть на большинстве прототипов беспилотных машин, в том числе и на машинах «Яндекса».
Вращающаяся конструкция лежит в основе в том числе и собственных лидаров Waymo. Как в основном лидаре, который устанавливается на крыше автомобиля, так и в дополнительных, которые расположены над колесными арками для бокового обзора.
Боковые лидары Waymo
Второй вариант конструкции лидара — твёрдотельные и полутвердотельные лидары. В таких сенсорах лазер всегда зафиксирован, а для перенаправления луча используется сложная конструкция из оптических элементов, которые с высокой скоростью изменяют своё положение и перенаправляют сигнал в разных направлениях.
В таких сенсорах лазер всегда зафиксирован, а для перенаправления луча используется сложная конструкция из оптических элементов, которые с высокой скоростью изменяют своё положение и перенаправляют сигнал в разных направлениях.
Как устроен лидар «Яндекса»
«Яндекс» рассматривал оба варианта конструкции лидара, поэтому два года назад собрал два прототипа — с вращающейся платформой и статичным лазером. Оба прототипа тестировались на беспилотных автомобилях компании, в результате разработчики решили сосредоточиться на статичной конструкции.
Первые прототипы: сверху — вращающийся лидар, снизу два лидара со статичным лазером
По мнению инженеров, статичное решение оказалось более надежным, так как в нём не используется тяжелых движущихся частей, а сам сенсор устойчивее к морозам и вибрациям.
Внешне финальный вариант лидара «Яндекса» похож на шестигранник с четырьмя стеклянными поверхностями, за которыми скрываются оптические конструкции и лазеры. Инженеры также разработали систему очистки сжатым воздухом и омывающей жидкостью, которая автоматически активируется в тот момент, когда на картинке, генерируемой лидаром, появляются нехарактерные визуальные шумы.
Инженеры также разработали систему очистки сжатым воздухом и омывающей жидкостью, которая автоматически активируется в тот момент, когда на картинке, генерируемой лидаром, появляются нехарактерные визуальные шумы.
Инженеры не раскрывают подробности устройства оптической системы, установленной внутри, но по своему общему принципу она похожа на систему с быстро меняющими свое положение отражающими поверхностями. Луч лазера постоянно перенаправляется в разные точки пространства, чтобы охватить как можно больше окружающих объектов.
Такая конструкция позволяет управлять лидаром программно, поясняют в компании: «Можно сконцентрировать больше лучей в определенной точке и повысить их плотность, чтобы получить более детализированную картинку».
Пример работы лидара «Яндекса» (на визуализации показаны данные, полученные только с лидара, установленного на крыше машины)
«Например, это полезно на узких улицах с обилием пешеходов. Мы фокусируем лучи лидара на ближайшем окружении и получаем более точную картинку всего происходящего вокруг автомобиля.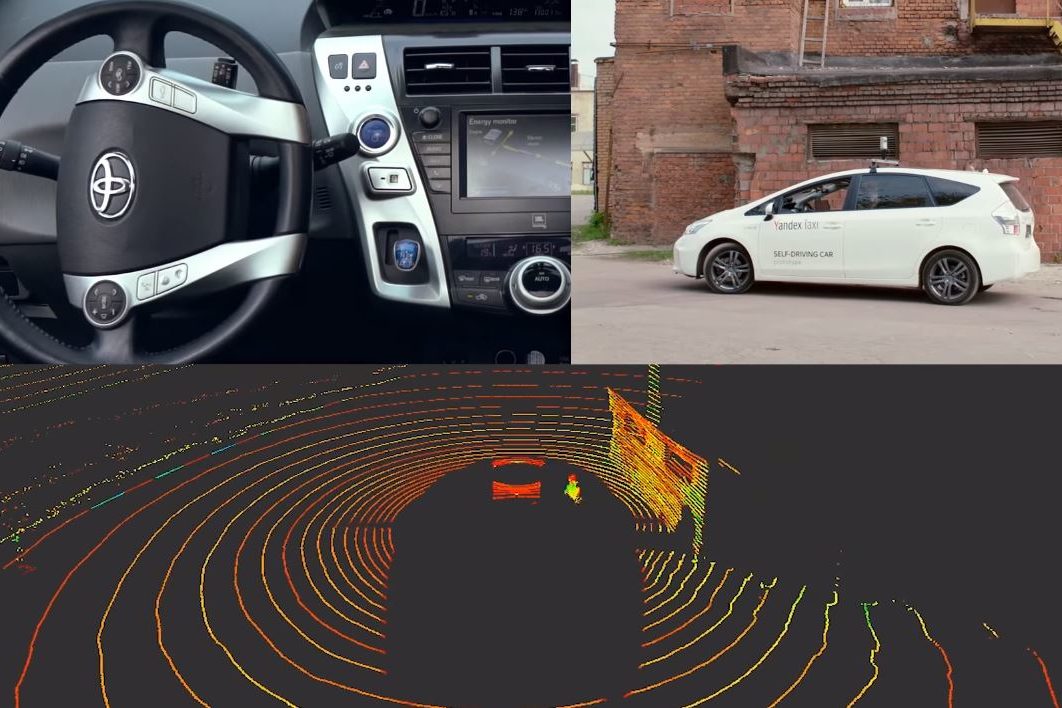 И наоборот, на трассе с более высокой скоростью движения для машины важно переместить фокус на дальние объекты, чтобы заранее “увидеть” потенциальные опасности». Так, лидар может распознать легковой автомобиль на расстоянии 200 метров, грузовик — до 500 метров, здание — в 600 метрах.
И наоборот, на трассе с более высокой скоростью движения для машины важно переместить фокус на дальние объекты, чтобы заранее “увидеть” потенциальные опасности». Так, лидар может распознать легковой автомобиль на расстоянии 200 метров, грузовик — до 500 метров, здание — в 600 метрах.
Пример облака, получаемого с помощью лидара «Яндекса»
Фокусировка нужна и в те моменты, когда алгоритм не может с точностью распознать объект. В таком случае лидар может сконцентрировать лучи на конкретной области, чтобы получить как можно больше данных.
Все автомобили последнего поколения беспилотников «Яндекса» уже перешли на использование собственных лидаров — суммарно автомобили проехали более 500 тысяч километром с новыми сенсорами на крыше.
Компания планирует отказаться от использования сторонних решений и для боковых лидаров, которые расположены над колесными арками. А также перейти на собственные разработки для сенсоров в роботах-курьерах.
Яндекс Беспилотный автомобиль | Энциклопедия MDPI
Беспилотный автомобиль Яндекса (Группа самостоятельного вождения Яндекса) — проект роботакси российской интернет-корпорации Яндекс. Первый беспилотный прототип запущен в мае 2017 года. По состоянию на 2018 год функциональный сервис был запущен в России, а прототипы также проходят испытания в Израиле и США. В 2019 году Яндекс представил автономных роботов-доставщиков, основанных на том же стеке технологий, что и беспилотные автомобили компании. С 2020 года автономные роботы доставляют еду, продукты и посылки по России и США. В 2020 году проект автономного вождения был выделен в отдельную компанию под названием Yandex Self-Driving Group (Yandex SDG).
1. История
1.1. 2017
В июне 2017 года «Яндекс.Такси» выпустило видео, демонстрирующее технологию беспилотных автомобилей. [1] Прототип автомобиля представлял собой сильно модифицированный гибридный универсал/компактный минивэн Toyota Prius+, оснащенный тремя оптическими датчиками расстояния LiDAR от Velodyne, шестью радарами, шестью камерами и датчиком GNSS для навигации, с процессорами Intel и графическими процессорами NVIDIA [2] с использованием операционной системы GNU с ядром Linux. [3] [4]
[3] [4]
В ноябре 2017 года были представлены результаты зимних испытаний. Машина успешно ехала по заснеженным дорогам, несмотря на повышенные трудности, представляемые снегом. Автомобиль преодолел 300 км по закрытой трассе. [5]
1.2. 2018
Яндекс роботакси в Иннополисе. https://handwiki.org/wiki/index.php?curid=1938326
Сервис робо-такси был запущен в августе 2018 года в университетском городке Иннополис в Республике Татарстан на западе России. [6] Услуга предоставляется бесплатно. Во время поездок за рулем никого нет, а инженеры Яндекса занимают пассажирские места и выступают в роли наблюдателей за безопасностью. В феврале 2020 года сообщалось, что в Иннополисе совершено более 5000 автономных пассажирских поездок. [7]
В конце 2018 года Яндекс получил лицензию на использование своих беспилотных автомобилей на дорогах общего пользования в Неваде. В начале 2019 года беспилотные автомобили совершили демонстрационные заезды для гостей выставки CES 2019 в Лас-Вегасе. [8] В отличие от других прототипов, представленных на выставке, автомобили разъезжали по улицам города без какого-либо контроля со стороны человека. Инженера за рулем не было, только один на пассажирском сиденье, чтобы взять на себя управление автомобилем в случае чрезвычайной ситуации. В январе 2020 года Яндекс во второй раз предоставил автономные аттракционы для гостей CES. [9]
[8] В отличие от других прототипов, представленных на выставке, автомобили разъезжали по улицам города без какого-либо контроля со стороны человека. Инженера за рулем не было, только один на пассажирском сиденье, чтобы взять на себя управление автомобилем в случае чрезвычайной ситуации. В январе 2020 года Яндекс во второй раз предоставил автономные аттракционы для гостей CES. [9]
В декабре 2018 года компания получила разрешение Министерства транспорта Израиля на испытания своих беспилотных автомобилей на дорогах общего пользования. Это делает Израиль третьей страной, где компания тестирует свои беспилотные автомобили. [10] [11] В сентябре 2019 года территория тестирования была расширена за счет включения центра города. [12]
1.3. 2019
В октябре 2019 года Яндекс объявил, что его беспилотные автомобили преодолели 1 миллион миль в полностью автономном режиме с момента начала тестирования технологии. [13] Еще четыре компании, которые ранее объявили о подобных или больших расстояниях, — это Waymo, [14] GM Cruise, [15] Baidu [16] и Uber. [17]
[13] Еще четыре компании, которые ранее объявили о подобных или больших расстояниях, — это Waymo, [14] GM Cruise, [15] Baidu [16] и Uber. [17]
В ноябре 2019 года компания представила своего автономного робота-доставщика, основанного на той же технологии автономного вождения, которую компания использует для своих автономных автомобилей. Робот размером с чемодан передвигается по тротуарам со скоростью 5-8 км/ч. В рамках начального этапа тестирования роботы работали в кампусе Яндекса с 7000 сотрудников в Москве, перевозя небольшие посылки из одного здания в другое. [18]
1.4. 2020
Беспилотный автомобиль Яндекса и автономный робот-доставщик в Анн-Арборе. https://handwiki.org/wiki/index.php?curid=1820507
В июне 2020 года Яндекс представил 4-е поколение своих беспилотных автомобилей. Автомобили созданы на базе Hyundai Sonata и разработаны в сотрудничестве с Hyundai Mobis.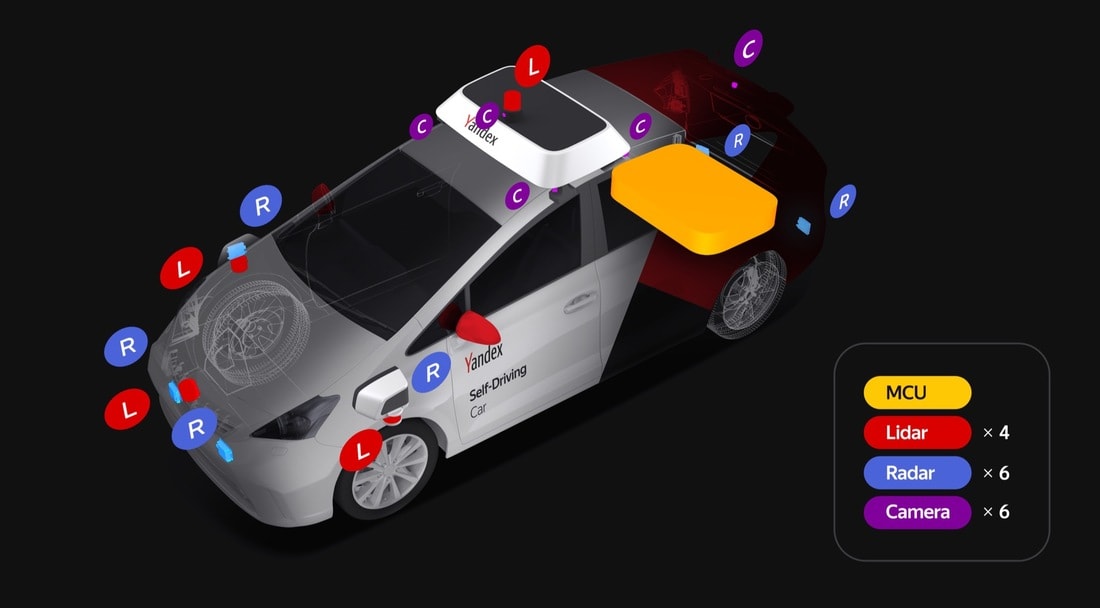 [19]
[19]
В августе 2020 года компания открыла центр испытаний автономных транспортных средств в Анн-Арборе. [20]
В сентябре 2020 года отдел беспилотных автомобилей Яндекса был выделен в отдельную компанию под названием Yandex Self-Driving Group (Yandex SDG) и получил 150 миллионов долларов от материнской компании.
1.5. 2021
В июле 2021 года Yandex SDG заключила партнерское соглашение с Grubhub для доставки роботов в кампусы колледжей США. [21] К концу 2021 года Yandex SDG и Grubhub запустили автономную роботизированную доставку в Университете штата Огайо [22] и Университете Аризоны. [23]
В октябре 2021 года Яндекс СДГ объявила о партнерстве с Почтой России. В рамках этого партнерства 36 роботов начали осуществлять автономные доставки из 27 почтовых отделений Москвы. [24]
В ноябре 2021 года компания объявила, что перейдет на использование проприетарных лидаров на своих автономных транспортных средствах. [25]
[25]
2. Самоуправляемые автомобили
Облако точек собственного лидара Яндекс SDG. https://handwiki.org/wiki/index.php?curid=1444168
В конце 2021 года в парке Яндекса было около 170 автономных транспортных средств, которые проехали более 14 миллионов километров (10 миллионов миль) по России, Израилю и США. [26]
AV основаны на серийных моделях автомобилей, таких как Toyota Prius и Hyundai Sonata. Каждая машина оснащена четырьмя лидарами, шестью радарами и от 8 до 12 камер. [27] С ноября 2021 года Яндекс использует собственные лидары. Полутвердотельные лидары Яндекс SDG распознают объекты на расстоянии до 500 метров и способны изменять схему сканирования в полете. Полутвердотельные лидары Яндекс SDG распознают объекты на расстоянии до 500 метров и способны изменять схему сканирования в полете. Они могут увеличить плотность облака точек в районе рядом с автомобилем, когда он движется по двору, или увеличить дальность при движении на высокой скорости по шоссе. [25]
[25]
Большая часть автопарка эксплуатируется в Москве круглый год и тщательно тестируется в различных погодных условиях, включая дождь и снег. Компания сообщила о конкретных технологиях, разработанных для борьбы с плохой погодой. К ним относятся лидарная фильтрация облаков по отражениям снежинок и измерение коэффициента трения для планирования скорости и маневров. [28]
3. Автономные роботы-доставщики
Автономный робот-доставщик Яндекса в Аризоне. https://handwiki.org/wiki/index.php?curid=1095497
Яндекс СДГ представила своих автономных роботов-доставщиков в конце 2019 года. Первые прототипы доставляли документы между зданиями кампуса Яндекса в Москве. В мае 2020 года роботы поступили в первую коммерческую эксплуатацию в Инновационном центре «Сколково», где помогали администрации города в перемещении документов по территории центра. [29]
В конце 2020 года роботы присоединились к службе доставки еды Яндекс. Еда и начали доставлять еду и продукты в несколько районов Москвы. [30] Полгода спустя Яндекс SDG заключил партнерское соглашение с Grubhub для доставки роботов в университетские городки США. К концу 2021 года компании запустили автономную роботизированную доставку в Университете штата Огайо и Университете Аризоны.
Еда и начали доставлять еду и продукты в несколько районов Москвы. [30] Полгода спустя Яндекс SDG заключил партнерское соглашение с Grubhub для доставки роботов в университетские городки США. К концу 2021 года компании запустили автономную роботизированную доставку в Университете штата Огайо и Университете Аризоны.
Автономные роботы-доставщики Яндекса работают по той же технологии, что и автономные автомобили компании. Роботы оснащены теми же типами датчиков, что и автомобили (лидары, радары и камеры), что означает, что они могут повторно использовать алгоритмы локализации и восприятия, разработанные для автомобилей. Роботы также повторно используют многие нейронные сети, в частности, для прогнозирования поведения других участников дорожного движения. Эти сети изначально разрабатывались для автомобилей, а данные тестировались, адаптировались и внедрялись для роботов. [31]
Роботы передвигаются со скоростью 5–8 км/ч (3–5 миль/ч), могут автономно перемещаться по пешеходным переходам и распознавать сигналы светофора. Среднее время работы от одного заряда составляет около 8–12 часов. Последнее поколение роботов Яндекса имеет сменные батареи. [32]
Среднее время работы от одного заряда составляет около 8–12 часов. Последнее поколение роботов Яндекса имеет сменные батареи. [32]
4. Товарищества
4.1. Хендай Мобис
Яндекс автономный Hyundai Sonata. https://handwiki.org/wiki/index.php?curid=1503574
В марте 2019 года между Яндексом и Hyundai было подписано соглашение о работе над автономными автомобильными системами. [33] Они разработают системы управления автономными транспортными средствами для уровней 4 и 5, категорий автоматизации, определенных как требующих ограниченного вмешательства человека. [34]
Целью партнерства является предоставление готового решения, которое могут использовать другие производители. [35] Компании планируют показать первый прототип совместного проекта до конца 2019 года. и картографические технологии. [36]
В июле 2019 года Hyundai Mobis и Яндекс представили беспилотную Hyundai Sonata 2020 как первый результат совместной работы. [37] В июне 2020 года Яндекс представил 4-е поколение своих беспилотных автомобилей на базе Hyundai Sonata.
[37] В июне 2020 года Яндекс представил 4-е поколение своих беспилотных автомобилей на базе Hyundai Sonata.
5. Критика
Яндекс раскрывает только количество автономных километров, пройденных автомобилями в автономном режиме, но не раскрывает скорость отключения.
Как и для всех автономных машин, скорость отключения (частота, с которой люди-водители были вынуждены взять на себя управление) имеет решающее значение. Из-за отсутствия стандартов для данных, которые указываются в отчетах, компаниям разрешено исключать определенные инциденты нестандартизированным способом, что делает невозможным прямое сравнение. [38]
Яндекс внедряет собственные лидары в автопарк | от команды самоуправляемых автомобилей Яндекса | Yandex Self-Driving Group
Лидар — важный датчик для беспилотных автомобилей. Лидары используют лазерный свет для сканирования своего окружения и создания трехмерной картины внешнего мира. Используя отраженные сигналы, лидары определяют форму различных близлежащих объектов и расстояние до них с точностью до сантиметра даже в темноте. Они также позволяют автономным транспортным средствам точно определять свое положение на дороге, сравнивая создаваемые ими 3D-изображения со встроенными в них 3D-картами.
Они также позволяют автономным транспортным средствам точно определять свое положение на дороге, сравнивая создаваемые ими 3D-изображения со встроенными в них 3D-картами.
Весной 2019 года мы начали делать собственные лидары, а спустя девять месяцев начали тестировать первые беспилотные автомобили, оснащенные нашими лидарами, на городских улицах. Сегодня, спустя еще два года разработки, мы полностью перешли на использование в качестве основного датчика собственных программно-определяемых лидаров собственной разработки. Все наши автомобили четвертого поколения уже оснащены ими, и они также будут включены во все наши новые автомобили в будущем. В этом сообщении в блоге подробно описаны ключевые особенности нашего лидара и объясняется, почему наличие собственного датчика так важно для развития технологий автономного вождения.
Для начала, что такое программно определяемый лидар? Это датчик, параметры которого, в том числе количество лучей, угол обзора, дальность и другие, можно изменять заранее или во время движения автомобиля, в зависимости от стоящих перед ним задач и дорожных условий. Например, этот датчик может увеличивать плотность облака точек в районе рядом с автомобилем, когда он движется по двору, или увеличивать дальность действия при движении на высокой скорости по трассе. Эту функцию можно использовать и для более сложных задач, таких как повышение разрешения именно в той области, где алгоритмы сообщают об определенном уровне неопределенности в распознавании объектов.
Например, этот датчик может увеличивать плотность облака точек в районе рядом с автомобилем, когда он движется по двору, или увеличивать дальность действия при движении на высокой скорости по трассе. Эту функцию можно использовать и для более сложных задач, таких как повышение разрешения именно в той области, где алгоритмы сообщают об определенном уровне неопределенности в распознавании объектов.
Транспортное средство движется с узкого переулка на широкое шоссе. Лидар переключается с крупного плана на дальний режим сканирования. Это позволяет системе более детально видеть объекты на расстоянии.
Из-за того, что наш лидар определяется программным обеспечением, он не имеет каких-либо фиксированных основных параметров, таких как дальность обнаружения или разрешение. Варьируя параметры лазера и системы сканирования, можно достичь дальности до 500 метров и разрешения 0,1 во всех направлениях. Это означает, что схема сканирования наших лидаров может изменяться в режиме реального времени, выбирая характеристики сканирования, наиболее подходящие для каждой ситуации.
Итак, при движении по узкой улице с активным пешеходным движением мы можем сфокусировать большую часть лучей на дороге перед автомобилем, сильно увеличивая плотность облаков для распознавания близлежащих объектов. С другой стороны, на широких скоростных автомагистралях важнее видеть объекты на расстоянии. Изменение соответствующих настроек повысит плотность в нужной зоне и позволит распознать легковой автомобиль на расстоянии 200 метров или тракторный прицеп на расстоянии 500 метров. Этот диапазон также важен для локализации транспортного средства с помощью лидарных алгоритмов локализации в районах без очень плотной застройки вблизи дороги, таких как широкие проспекты, автомагистрали и путепроводы.
В этом видеоролике рассказывается о нашем программно-определяемом подходе к использованию основного лидара. В начале видео вы увидите, как наша система использует стандартный шаблон сканирования. Как только машина подъезжает к узкому переулку, заполненному пешеходами, система переключается на сканирование крупным планом. Позже, когда автомобиль выезжает на большую многополосную магистраль, система переходит на схему сканирования дальнего действия, чтобы лучше идентифицировать объекты на расстоянии. В этом видео показано облако точек только с центрального лидара. Каждое беспилотное транспортное средство оснащено дополнительными лидарами для обнаружения объектов малого и среднего размера непосредственно перед автомобилем или рядом с ним.
Позже, когда автомобиль выезжает на большую многополосную магистраль, система переходит на схему сканирования дальнего действия, чтобы лучше идентифицировать объекты на расстоянии. В этом видео показано облако точек только с центрального лидара. Каждое беспилотное транспортное средство оснащено дополнительными лидарами для обнаружения объектов малого и среднего размера непосредственно перед автомобилем или рядом с ним.
Такая гибкость настройки параметров возможна благодаря конструкции системы сканирования лидара. Кроме того, внутри него отсутствуют вращающиеся электронные элементы, а значит, такие виды лидаров более надежны и менее подвержены тепловым искажениям, с которыми мы сталкивались ранее при использовании вращающихся лидаров. Наши твердотельные лидары одинаково хорошо работают на реальных дорогах при температурах от -30 до +30 по Цельсию, что является обычным для России и других стран и регионов с ярко выраженным континентальным климатом годовым температурным диапазоном.
Использование программно-определяемого подхода становится возможным, когда датчик и стек технологий автономного вождения связаны. Управление основным датчиком дает и другие преимущества, такие как доступ к необработанным данным, сбор специализированных наборов данных и, конечно же, оптимизация цен. Мы вложили много сил в разработку собственного лидара. В результате мы смогли менее чем за три года пройти путь от концепта до серийной модели, которая по многим параметрам превосходит лидары, которые мы использовали раньше, и стоит нам столько же. Мы смогли сохранить этот темп, сразу же протестировав наши гипотезы и усовершенствования с помощью лидаров на реальных беспилотных автомобилях. На сегодняшний день наши автомобили уже преодолели более 500 000 километров с помощью наших собственных лидаров, доказав свою функциональность и надежность.
Управление основным датчиком дает и другие преимущества, такие как доступ к необработанным данным, сбор специализированных наборов данных и, конечно же, оптимизация цен. Мы вложили много сил в разработку собственного лидара. В результате мы смогли менее чем за три года пройти путь от концепта до серийной модели, которая по многим параметрам превосходит лидары, которые мы использовали раньше, и стоит нам столько же. Мы смогли сохранить этот темп, сразу же протестировав наши гипотезы и усовершенствования с помощью лидаров на реальных беспилотных автомобилях. На сегодняшний день наши автомобили уже преодолели более 500 000 километров с помощью наших собственных лидаров, доказав свою функциональность и надежность.
Сегодня мы достигли важной вехи и продолжим совершенствовать наши лидары, а также разрабатывать новые. Мы уже тестируем прототипы боковых лидаров для обнаружения в ближнем поле, а также разрабатываем лидар для наших автономных роботов-доставщиков. Использование собственных лидаров в нашем парке еще больше укрепило нашу уверенность в том, что тесная взаимосвязь между технологией и датчиком может привести к впечатляющим возможностям, и мы надеемся, что впереди нас ждет еще больше прорывов и значимых улучшений.