Содержание
Студенты НГТУ НЭТИ создали пневматические мышцы для роботов
435
Добавить в закладки
Студенты факультета мехатроники и автоматизации Новосибирского государственного технического университета НЭТИ на основе принципов пневматики и упругого растяжения разработали искусственные мышцы, а затем интегрировали их в робота гуманоидного типа. Разработку можно будет использовать как платформу для обучения робототехнике, основам механики и пневматики. В будущем роботы с пневматическими мышцами смогут помогать не только в домашних делах, но и в других сферах жизни человека.
Команда состоит из трех участников: Андрей Зверев, Константин Воронцов и Данил Наумов.
«В последнее время особую актуальность во многих сферах деятельности набирают робототехника и машиностроение. С командой мы решили сделать робота гуманоидного типа с пневмомышцами. Оказалось, что идея достаточно актуальна и востребована. Изучив рынок и то, какие сейчас ведутся научные исследования, мы выявили, что искусственные мышцы имеют большую актуальность во многих системах», — рассказал главный разработчик проекта Андрей Зверев.
Изучив рынок и то, какие сейчас ведутся научные исследования, мы выявили, что искусственные мышцы имеют большую актуальность во многих системах», — рассказал главный разработчик проекта Андрей Зверев.
По его словам, мышцы работают при помощи пневматики за счет разности в давлении газов. Компрессор качает воздух, распределяя его по мышцам, которые приводятся в движение. Разработка студентов НГТУ НЭТИ состоит из двух направлений. Первое — это создание скелета и каркаса, в который вставляются мышцы, а также других механических частей робота. Второе — создание и внедрение в каркас пневматических мышц.
«Полгода назад мы нашли в интернете чертежи французского художника, который выложил в открытый доступ 3D-модели деталей робота гуманоидного типа в человеческий рост — 175 см. Робот приводится в движение, по задумке автора, при помощи электромоторов. Тогда мы с командой решили, что это будет хорошим прототипом. Мы использовали 3D-модели художника, переработали определенные детали, добавили свои и привели его в движение при помощи пневматики. Принцип работы похож на надувание воздушного шарика. Все, наверное, видели, как на ярмарках из длинных шаров делают разных животных. Здесь использован похожий принцип: мы создали специальное условие, когда помещаем силиконовую трубку в материал и подаем воздух. И получается, что наша мышца расширяется и сокращается. Это выглядит как работа настоящих мышц», — прокомментировал Андрей Зверев.
Принцип работы похож на надувание воздушного шарика. Все, наверное, видели, как на ярмарках из длинных шаров делают разных животных. Здесь использован похожий принцип: мы создали специальное условие, когда помещаем силиконовую трубку в материал и подаем воздух. И получается, что наша мышца расширяется и сокращается. Это выглядит как работа настоящих мышц», — прокомментировал Андрей Зверев.
Сейчас разрабатывается тестовый образец руки, который будет управляться с пульта. В ближайшее время будет создано программное обеспечение с определенными командами и пультом управления для демонстрации функционала.
«Отличие нашей разработки от уже существующих аналогов в том, что у нас нестандартный принцип осуществления движения каких-либо механизмов, мы используем пневматические мышцы. Второй фактор — наша конструкция. Она достаточно легка в сборке и имеет инструкцию. Робота сможет собрать даже школьник 9 класса. Наша разработка будет иметь меньший вес по сравнению с аналогами на электромоторах и других приводах», — добавил Андрей Зверев.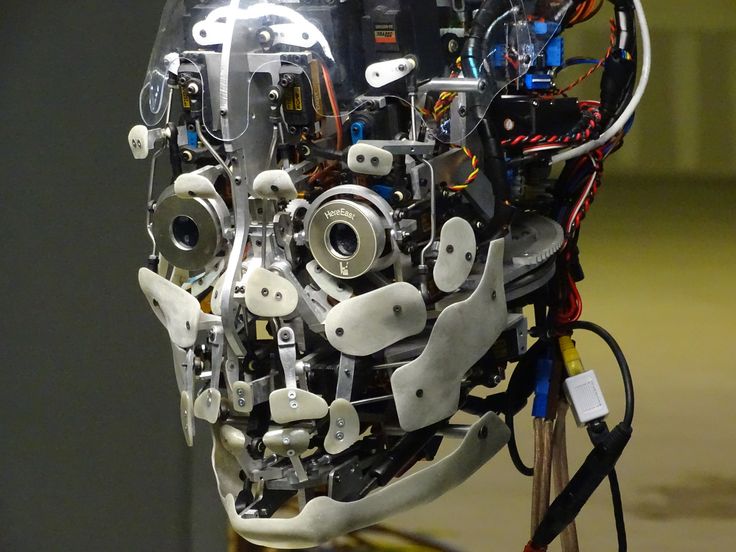
Информация и фото предоставлены Управлением информационной политики Новосибирского государственного технического университета
Разместила Ирина Усик
искусственные мышцы
нгту нэти
роботы
Источник:
www.nstu.ru
Информация предоставлена Информационным агентством «Научная Россия». Свидетельство о регистрации СМИ: ИА № ФС77-62580, выдано
Федеральной службой по надзору в сфере связи, информационных технологий и массовых коммуникаций 31 июля 2015 года.
НАУКА ДЕТЯМ
Академик Александр Некипелов: Культура ― это сердцевина социума
19:57 / Наука и общество, Образование
Ректор СПбГУП, член-корр. РАН А. Запесоцкий стал кавалером ордена Почета
19:40 / Наука и общество, Образование
Ректор СПбГУП А. Запесоцкий: Главное не массовость, а качество подготовки
19:35 / Наука и общество, Образование
Из-за автоматизации 11% трудящихся в России могут потерять работу
18:32 / Новые технологии
Корни растений меняют форму в зависимости от количества воды
18:00 / Биология
Новый метод визуализации позволяет увидеть структуру и состав клетки в высоком разрешении
17:00 / Биология, Химия
Виталий Владимирович Кведер избран на должность академика-секретаря отделения физических наук РАН
16:00 / Персона, Физика
Помощник президента А. Фурсенко и глава Минобрнауки В. Фальков открыли мемориальную доску к 100-летию выдающегося этнографа Ю. Кнорозова
Фурсенко и глава Минобрнауки В. Фальков открыли мемориальную доску к 100-летию выдающегося этнографа Ю. Кнорозова
14:30 / Наука и общество, Образование
Торжественное заседание ученого совета Санкт-Петербургского Гуманитарного университета профсоюзов. Прямая трансляция
14:00 / Наука и общество, Образование
Москва, Санкт-Петербург и Томская область возглавили Национальный рейтинг научно-технологического развития регионов
13:40 / Наука и общество, Рейтинг
Памяти великого ученого. Наука в глобальном мире. «Очевиднное — невероятное» эфир 10.05.2008
04.03.2019
Памяти великого ученого. Нанотехнологии. «Очевидное — невероятное» эфир 3.08.2002
04.03.2019
Вспоминая Сергея Петровича Капицу
14.02.2017
Смотреть все
Искусственные мышцы своими руками: изготовление и специфические особенности
Современные роботы могут многое. Но при этом им далеко до человеческой легкости и грациозности движений.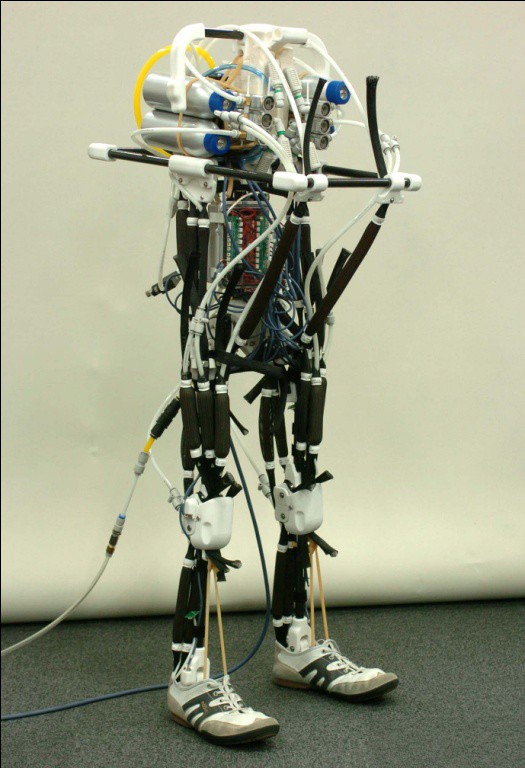 И вина тому — несовершенные искусственные мышцы. Ученые многих стран стараются решить эту проблему. Статья будет посвящена краткому обзору их удивительных изобретений.
И вина тому — несовершенные искусственные мышцы. Ученые многих стран стараются решить эту проблему. Статья будет посвящена краткому обзору их удивительных изобретений.
Полимерные мышцы от сингапурских ученых
Шаг к более человекообразным роботам недавно сделали изобретатели из Национального университета Сингапура. Сегодня андроиды-тяжеловесы двигаются за счет работы гидравлических систем. Существенный минус последних — небольшая скорость. Искусственные же мышцы для роботов, представленные сингапурскими учеными, позволяют киборгам не только поднимать предметы, которые в 80 раз тяжелее их собственного веса, но и делать это так же быстро, как и человек.
Инновационная разработка, растягивающаяся в длину в пять раз, помогает «обойти» роботам даже муравьев, которые, как известно, могут переносить предметы в 20 раз тяжелее веса их собственного тельца. Полимерные мышцы обладают следующими достоинствами:
- гибкостью;
- поражающей прочностью;
- эластичностью;
- способностью менять свою форму за несколько секунд;
- возможностью преобразовывать кинетическую энергию в электрическую.


Однако на этом ученые не собираются останавливаться — в их планах создать искусственную мускулатуру, которая бы позволила роботу поднимать груз, в 500 раз тяжелее его самого!
Открытие из Гарварда — мышцы из электродов и эластомера
Изобретатели, которые трудятся в Школе прикладных и инженерных наук Гарвардского университета, представили качественно новые искусственные мышцы для так называемых «мягких» роботов. По словам ученых, их детище, состоящее из мягкого эластомера и электродов, в чьем составе углеродные нанотрубки, по своим качествам не уступает человеческой мускулатуре!
Все существующие на сегодня роботы, как уже говорилось, имеют в своей основе приводы, чей механизм — это гидравлика или пневматика. Такие системы работают за счет сжатого воздуха или реакции химических веществ. Это не позволяет сконструировать робота, такого же мягкого и быстрого, как человек. Гарвардские ученые устранили этот недостаток, создав качественно новый концепт искусственных мышц для роботов.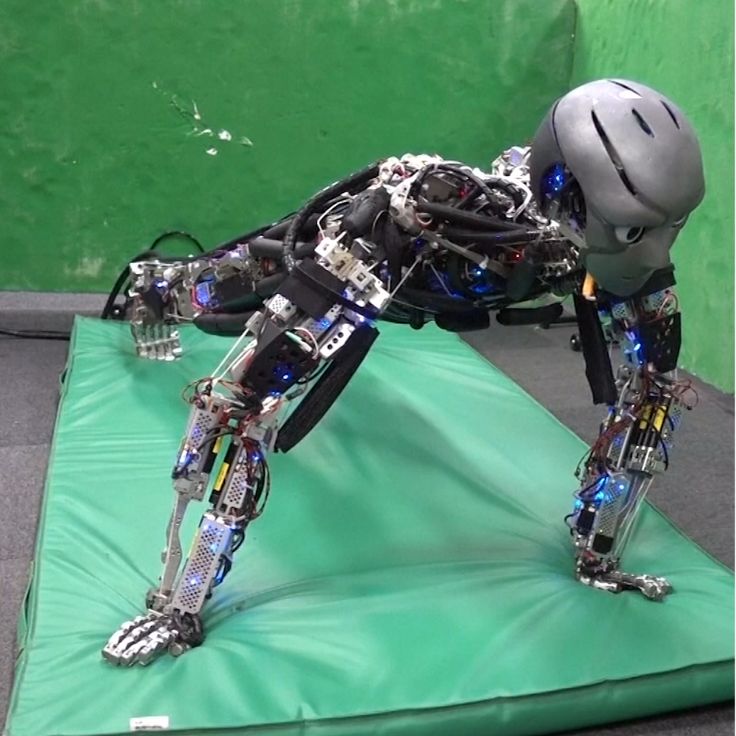
Новая «мускулатура» киборгов — многослойная структура, в которой электроды из нанотрубок, созданные в лаборатории Кларка, управляют верхними и нижними слоями гибких эластомеров, являющихся детищем ученых уже из Калифорнийского университета. Такие мышцы идеальны как для «мягких» андроидов, так и для лапароскопических инструментов в хирургии.
На этом замечательном изобретении гарвардские ученые не остановились. Одна из последних их разработок — это биоробот-скат. Его составляющие — клетки сердечных мышц крыс, золото и силикон.
Изобретение группы Баухмана: еще один вид искусственных мышц на основе углеродных нанотрубок
Еще в 1999 г. в австралийском городке Кирхберге на 13-й встрече Международной зимней школы по электронным свойствам инновационных материалов выступил с докладом ученый Рей Баухман, работающий в компании Allied Signal и возглавляющий международную исследовательскую группу. Его сообщение было на тему изготовления искусственных мышц.
Разработчики под началом Рэя Баухмана смогли представить углеродные нанотрубки в виде листов нанобумаги. Трубочки в этом изобретении были всячески переплетены и перепутаны между собой. Сама нанобумага своим видом напоминала обычную — ее возможно было держать в руках, разрезать на полосы и кусочки.
Трубочки в этом изобретении были всячески переплетены и перепутаны между собой. Сама нанобумага своим видом напоминала обычную — ее возможно было держать в руках, разрезать на полосы и кусочки.
Эксперимент группы с виду был очень прост — ученые прикрепили кусочки нанобумаги к разным сторонам клейкой ленты и опустили эту конструкцию в соляной электропроводный раствор. После того как была включена слабовольтная батарея, обе нанополоски удлинились, особенно та, что была связана с отрицательным полюсом электробатареи; затем бумага изогнулась. Модель искусственной мышцы функционировала.
Сам Баухман считает, что его изобретение после качественной модернизации существенно преобразит роботехнику, ведь такие углеродные мышцы при сгибании/разгибании создают электрический потенциал — производят энергию. К тому же такая мускулатура раза в три сильнее человеческой, может функционировать при крайне высоких и низких температурах, используя для своей работы невысокую силу тока и напряжения.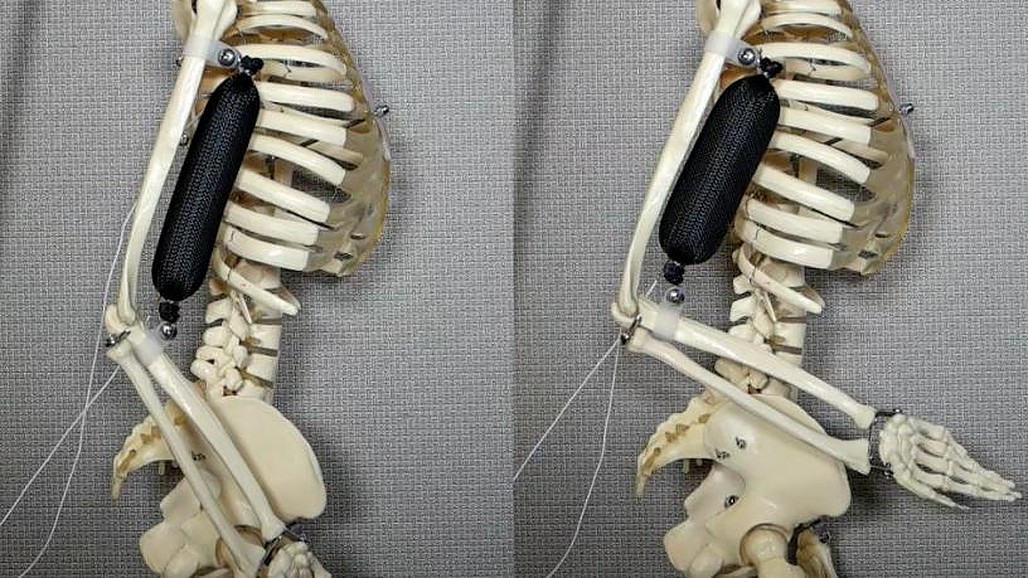 Вполне возможно ее применение и для протезирования человеческих мышц.
Вполне возможно ее применение и для протезирования человеческих мышц.
Техасский университет: искусственные мышцы из рыболовной лески и швейных ниток
Одной из самых поразительных является работа ученой группы из Техасского университета, который расположен в Далласе. Ей удалось получить модель искусственной мускулатуры, по своей силе и мощности напоминающей реактивный двигатель — 7,1 л.с./кг! Такие мышцы в сотни раз сильнее и продуктивнее человеческих. Но самое удивительное здесь то, что их сконструировали из примитивных материалов — высокопрочной лески из полимера и швейной нитки.
Питание такой мышцы — это перепад температур. Обеспечивает его швейная нить, покрытая тонким слоем металла. Однако в будущем мышцы роботов могут подпитываться от перепадов температур окружающей их среды. Это свойство, кстати, вполне можно применять для адаптирующейся к погоде одежды и других подобных устройств.
Если скручивать полимер в одну сторону, то он будет резко сжиматься при нагревании и быстро растягиваться при охлаждении, а если в другую — то в корне наоборот. Такая нехитрая конструкция может, например, вращать габаритный ротор со скоростью 10 тыс. оборотов/мин. Плюс таких искусственных мышц из лески в том, что они способны сокращаться до 50 % от своей исходной длины (человеческие только на 20 %). Кроме этого, их отличает удивительная выносливость — эта мускулатура не «устает» даже после миллионного повторения действия!
Такая нехитрая конструкция может, например, вращать габаритный ротор со скоростью 10 тыс. оборотов/мин. Плюс таких искусственных мышц из лески в том, что они способны сокращаться до 50 % от своей исходной длины (человеческие только на 20 %). Кроме этого, их отличает удивительная выносливость — эта мускулатура не «устает» даже после миллионного повторения действия!
От Техаса до Амура
Открытие ученых из Далласа вдохновило немало ученых со всего мира. Успешно повторить их опыт, однако, удалось только одному роботехнику — Александру Николаевичу Семочкину, главе лаборатории информационных технологий при БГПУ.
Вначале изобретатель терпеливо ждал новых статей в Science о массовом внедрении в жизнь изобретения американских коллег. Так как этого не происходило, амурский ученый решил со своими единомышленниками повторить замечательный опыт и сотворить своими руками искусственные мышцы из медной проволоки и рыболовной лески. Но, увы, копия оказалась нежизнеспособной.
Вдохновение из «Сколково»
Вернуться к почти заброшенным опытам Александра Семочкина заставил случай — ученый попал на роботехническую конференцию в «Сколково», где познакомился с единомышленником из Зеленограда, руководителем компании «Нейроботикс». Как оказалось, инженеры этой фирмы тоже заняты созданием мышц из лесок, которые вполне себе жизнеспособны.
Как оказалось, инженеры этой фирмы тоже заняты созданием мышц из лесок, которые вполне себе жизнеспособны.
Вернувшись на родину, Александр Николаевич с новыми силами принялся за работу. За полтора месяца он смог не только собрать работоспособные искусственные мышцы, но и создать машину для их скручивания, которая делала витки лески строго повторяемыми.
Благовещенская искусственная мускулатура
Чтобы создать пятисантиметровую мышцу, А. Н. Семочкину нужно несколько метров проволоки и 20 см обычной рыболовной лески. Аппарат по «производству» мускулатуры, кстати, напечатанный на 3D-принтере, скручивает мышцу в течение 10 минут. Затем конструкцию на полчаса помещают в печь, раскаленную до +180 градусов по Цельсию.
Привести в действие такую мышцу можно при помощи электротока — достаточно подсоединить его источник к проволоке. В результате она начинает нагреваться и передавать свое тепло леске. Последняя вытягивается или сокращается — в зависимости от вида мышцы, которую скрутил аппарат.
Планы изобретателя
Новый проект Александра Семочкина — «научить» созданные мышцы быстрее возвращаться в исходное состояние. Этому может помочь быстрое охлаждение питающей проволоки — ученый предполагает, что такой процесс будет быстрее происходить под водой. После того как подобная мышца будет получена, первым ее обладателем станет Искандерус — антропоморфный робот БГПУ.
Ученый не держит свое изобретение в тайне — выкладывает ролики на «Ютуб», а также планирует написать статью с подробной инструкцией по созданию машинки, скручивающей мышцы из лески и проволоки.
Время не стоит на месте — искусственные мышцы, о которых мы вам рассказали, уже применяются в хирургии для проведения эндо- и лапароскопических операций. А в лаборатории «Дисней» с их участием собрали функционирующую руку.
Искусственные мышцы наделяют мягких роботов сверхспособностями. машины, чтобы сгибаться и сгибаться таким образом, чтобы имитировать и более естественно взаимодействовать с живыми организмами.
 Однако повышенная гибкость и ловкость имеют компромисс в виде снижения прочности, поскольку более мягкие материалы, как правило, не такие прочные и эластичные, как негибкие, что ограничивает их использование.
Однако повышенная гибкость и ловкость имеют компромисс в виде снижения прочности, поскольку более мягкие материалы, как правило, не такие прочные и эластичные, как негибкие, что ограничивает их использование.
Воспроизвести
В этом видео показано, как искусственным мышцам, вдохновленным оригами, можно придать практически любую форму и поднять в 1000 раз больше собственного веса. Авторы и права: Институт Висса Гарвардского университета
Теперь исследователи из Института Висса Гарвардского университета и Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) создали искусственные мышцы, вдохновленные оригами, которые добавляют силу мягким роботам, позволяя им поднимать предметы, которые до 1000 раз больше собственного веса, используя только давление воздуха или воды, что придает столь необходимую силу мягким роботам. Исследование опубликовано на этой неделе в Труды Национальной академии наук ( PNAS ).
Исследование опубликовано на этой неделе в Труды Национальной академии наук ( PNAS ).
«Мы были очень удивлены тем, насколько сильными были приводы [также известные как «мускулы»]. Мы ожидали, что их максимальный функциональный вес будет выше, чем у обычных мягких роботов, но не ожидали тысячекратного увеличения. Это все равно, что наделить этих роботов сверхспособностями», — говорит Даниэла Рус, доктор философии, профессор электротехники и компьютерных наук Эндрю и Эрны Витерби в Массачусетском технологическом институте и один из старших авторов статьи.
Искусственные мышцы, вдохновленные оригами, способны поднимать в 1000 раз больше собственного веса, просто применяя давление воздуха или воды. Предоставлено: Шугуан Ли / Институт Висса Гарвардского университета
. «Искусственные мышечные приводы — одна из самых важных глобальных задач во всей инженерии», — добавляет Роб Вуд, доктор философии, автор статьи и один из основателей профессорско-преподавательского состава.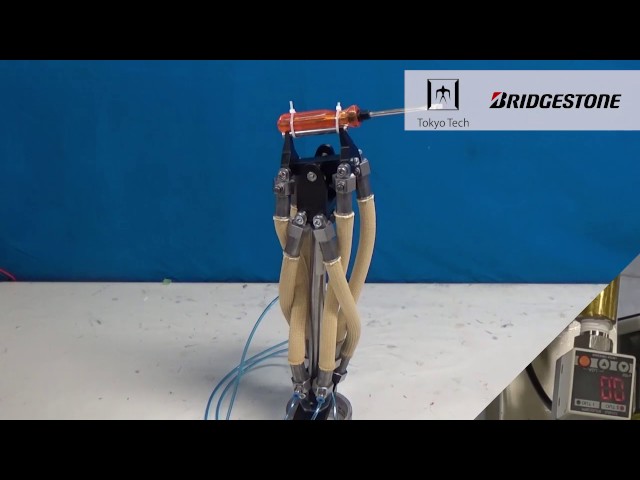 из Института Висса, который также является профессором инженерных и прикладных наук им. Чарльза Ривера в Гарвардской школе инженерных и прикладных наук имени Джона А. Полсона (SEAS). «Теперь, когда мы создали приводы со свойствами, подобными природным мышцам, мы можем представить создание практически любого робота практически для любой задачи».
из Института Висса, который также является профессором инженерных и прикладных наук им. Чарльза Ривера в Гарвардской школе инженерных и прикладных наук имени Джона А. Полсона (SEAS). «Теперь, когда мы создали приводы со свойствами, подобными природным мышцам, мы можем представить создание практически любого робота практически для любой задачи».
Каждая искусственная мышца состоит из внутреннего «скелета», который может быть изготовлен из различных материалов, таких как металлическая катушка или лист пластика, сложенный по определенной схеме, окруженный воздухом или жидкостью и запечатанный внутри пластикового или текстильного мешка, который служит «кожей». Вакуум, приложенный к внутренней части мешка, инициирует движение мышц, заставляя кожу сваливаться на скелет, создавая напряжение, которое приводит в движение. Невероятно, но для управления движением мышц не требуется никакого другого источника энергии или вмешательства человека; она полностью определяется формой и составом скелета.
«Одним из ключевых аспектов этих мышц является то, что они программируемые, в том смысле, что проектирование того, как складывается скелет, определяет, как движется вся структура. По сути, вы получаете это движение бесплатно, без необходимости в системе управления», — говорит первый автор Шугуан Ли, доктор философии, научный сотрудник Института Висса и MIT CSAIL. Такой подход позволяет мышцам быть очень компактными и простыми и, таким образом, более подходящим для мобильных или устанавливаемых на теле систем, которые не могут вмещать большое или тяжелое оборудование.
Искусственные приводы, похожие на мускулы, являются одной из самых важных задач во всей инженерии.
Роберт Вуд
«При создании роботов всегда приходится спрашивать: где разум — в теле или в мозгу?», — говорит Рус. «Внедрение интеллекта в тело ( через конкретных шаблонов складывания, в случае с нашими приводами) может упростить алгоритмы, необходимые для направления робота к своей цели.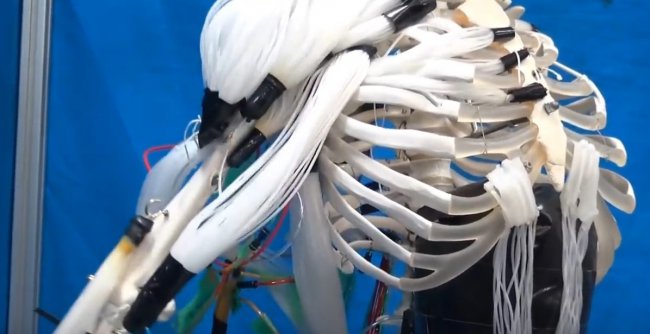 Все эти приводы имеют один и тот же простой переключатель включения/выключения, который затем преобразуется их корпусом в широкий диапазон движений».
Все эти приводы имеют один и тот же простой переключатель включения/выключения, который затем преобразуется их корпусом в широкий диапазон движений».
Команда сконструировала десятки мышц, используя различные материалы, от металлических пружин до упаковочной пены и листов пластика, и экспериментировала с различными формами скелета, чтобы создать мышцы, которые могут сокращаться до 10% от их первоначального размера, поднимая нежный цветок над землей. , и скрутить в змеевик, просто высосав из них воздух.
Структурная геометрия искусственного мышечного скелета определяет движение мышцы. Предоставлено: Шугуан Ли / Институт Висса при Гарвардском университете
Искусственные мышцы не только могут двигаться разными способами, они делают это с впечатляющей упругостью. Они могут генерировать примерно в шесть раз больше силы на единицу площади, чем скелетные мышцы млекопитающих, а также невероятно легкие; 2,6-граммовая мышца может поднять 3-килограммовый объект, что эквивалентно утке кряквы, поднимающей автомобиль. Кроме того, одну мышцу можно построить за десять минут из материалов, которые стоят менее 1 доллара, что делает их дешевыми и простыми в тестировании и повторении.
Кроме того, одну мышцу можно построить за десять минут из материалов, которые стоят менее 1 доллара, что делает их дешевыми и простыми в тестировании и повторении.
Эти мышцы могут приводиться в действие вакуумом, что делает их более безопасными, чем большинство других искусственных мышц, которые в настоящее время проходят испытания. «Многие приложения мягких роботов ориентированы на человека, поэтому, конечно, важно думать о безопасности», — говорит Даниэль Фогт, магистр наук, соавтор статьи и инженер-исследователь в Институте Висса. «Мышцы, основанные на вакууме, имеют меньший риск разрыва, отказа и повреждения, и они не расширяются во время работы, поэтому вы можете интегрировать их в роботов, более плотно прилегающих к человеческому телу».
«В дополнение к свойствам, подобным мышцам, эти мягкие актуаторы обладают высокой масштабируемостью. Мы создали их размером от нескольких миллиметров до метра, и их производительность остается неизменной», — говорит Вуд. Эта функция означает, что мышцы могут использоваться во многих приложениях в разных масштабах, таких как миниатюрные хирургические устройства, носимые роботизированные экзоскелеты, трансформируемая архитектура, глубоководные манипуляторы для исследований или строительства и большие развертываемые конструкции для освоения космоса.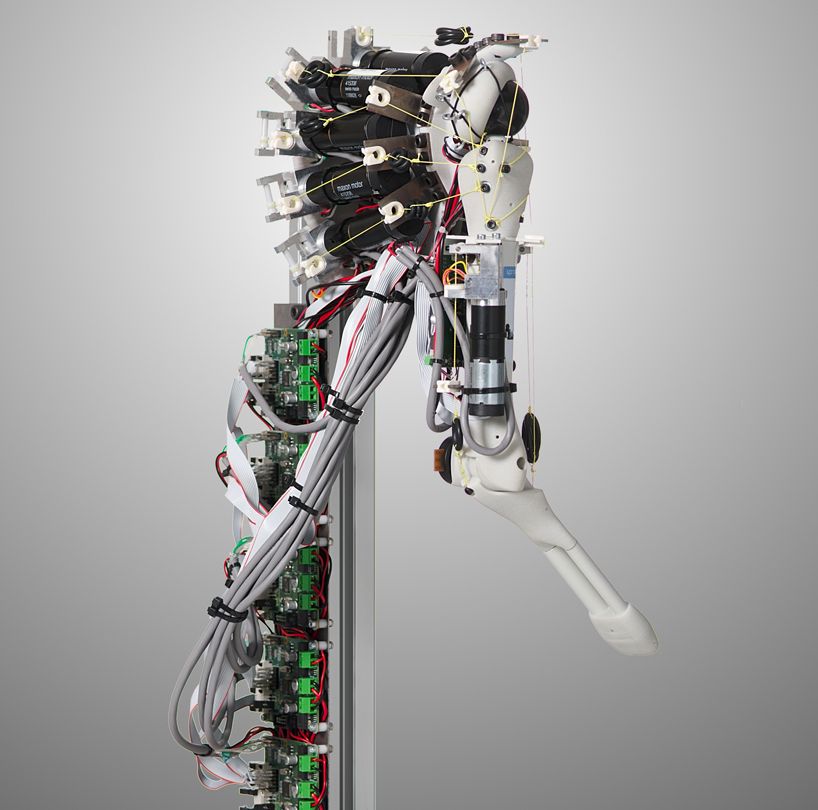
Команде даже удалось сконструировать мышцы из водорастворимого полимера ПВС, что открывает возможности для роботов, которые могут выполнять задачи в естественных условиях с минимальным воздействием на окружающую среду, а также для проглатываемых роботов, которые перемещаются в нужное место в нужном месте. тело, а затем растворяются, высвобождая лекарство. «Возможности действительно безграничны. Но следующее, что я хотел бы построить с этими мышцами, — это робот-слон с хоботом, который может манипулировать миром таким же гибким и мощным способом, как у настоящих слонов», — говорит Рус.
«Приводы, разработанные в результате сотрудничества между лабораторией Вуда в Гарварде и группой Rus в Массачусетском технологическом институте, иллюстрируют подход компании Wyss к тому, чтобы черпать вдохновение из природы, не ограничиваясь ее условностями, что может привести к созданию систем, которые не только имитируют природу, но и превосходят ее. говорит директор-основатель Института Висса Дональд Ингбер, доктор медицины, доктор философии, который также является профессором Джуды Фолкмана сосудистой биологии в HMS и программы сосудистой биологии в Бостонской детской больнице, а также профессором биоинженерии в МОРЯ.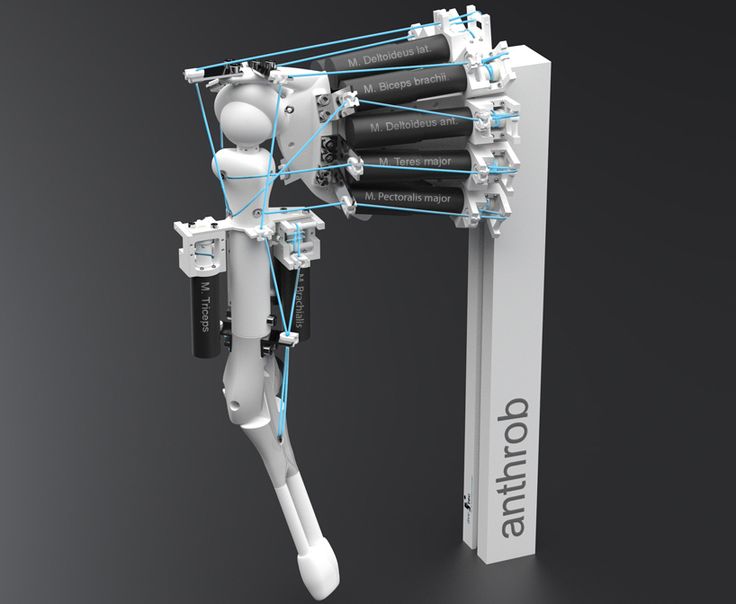
Это исследование финансировалось Агентством перспективных оборонных исследовательских проектов (DARPA), Национальным научным фондом (NSF) и Институтом биологической инженерии Висса.
FOAM: Мягкие роботизированные искусственные мышцы
Мягкие роботы, похожие на живые организмы, сделаны из совместимых материалов, что обеспечивает им большую гибкость и адаптируемость к задачам на интерфейсе человек-робот и в других местах. Для выполнения миссий мягких роботов в различных промышленных, исследовательских и медицинских учреждениях инженеры пытаются снабдить их искусственными мышцами, которые позволили бы им двигаться плавно, эффективно и безопасно, не нарушая их мягких свойств. Тем не менее, разработка простых в эксплуатации высокопроизводительных искусственных мышц, которые могут выполнять сложные движения и изготавливаться с низкими затратами, остается сложной задачей.
Воспроизвести
В этом видео показано, как искусственным мышцам, вдохновленным оригами, можно придать практически любую форму и поднять в 1000 раз больше собственного веса. Авторы и права: Институт Висса Гарвардского университета
Авторы и права: Институт Висса Гарвардского университета
Исследователи под руководством Роберта Вуда из Института Висса и Гарвардской школы инженерии и прикладных наук имени Джона А. Полсона и Даниэлы Рус из Лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института разработали решение. для решения этой задачи путем создания искусственных мышц (FOAM), приводимых в движение жидкостью, которые позволяют мягким роботам поднимать объекты, вес которых в 1000 раз превышает их собственный, используя только давление воздуха или воды.
Искусственные приводы, похожие на мускулы, являются одной из самых важных задач во всей инженерии. Теперь, когда мы создали приводы со свойствами, подобными природным мышцам, мы можем представить себе создание почти любого робота практически для любой задачи.
Robert Wood
Концепция FOAM объединяет три основных компонента — сжимаемый каркас, гибкую оболочку и текучую среду — в рамках механической структуры, определяющей их взаимодействие. Каркас может быть выполнен в различных формах с использованием различных материалов, таких как металлическая спираль или лист пластика, предварительно сложенный по определенному шаблону. Окруженный воздухом или жидкостью внутри пластиковой или текстильной оболочки, применение вакуума обратимо изменяет конфигурацию скелета, подобно оригами, которое складывается по определенному пути в свою окончательную форму, позволяя FOAM выполнять движения по нескольким осям, такие как сокращение, изгибающие и крутильные движения безопасным и мощным способом. Они способны заключать контракты более чем на 90% от их первоначальной длины и создают напряжения, которые могут превышать напряжения естественных мышц. Кроме того, их относительно простая архитектура открывает двери для быстрого проектирования и недорогого процесса изготовления.
Каркас может быть выполнен в различных формах с использованием различных материалов, таких как металлическая спираль или лист пластика, предварительно сложенный по определенному шаблону. Окруженный воздухом или жидкостью внутри пластиковой или текстильной оболочки, применение вакуума обратимо изменяет конфигурацию скелета, подобно оригами, которое складывается по определенному пути в свою окончательную форму, позволяя FOAM выполнять движения по нескольким осям, такие как сокращение, изгибающие и крутильные движения безопасным и мощным способом. Они способны заключать контракты более чем на 90% от их первоначальной длины и создают напряжения, которые могут превышать напряжения естественных мышц. Кроме того, их относительно простая архитектура открывает двери для быстрого проектирования и недорогого процесса изготовления.
FOAM могут быть разработаны для мягких роботов во многих масштабах и приложениях, начиная от миниатюрных медицинских устройств для деликатных операций и определенных видов терапии и заканчивая носимыми роботизированными экзоскелетами и большими развертываемыми конструкциями для исследования океана и космоса.