Робот Своими Руками В Домашних Условиях. Как делать роботов
Как Создать Робота Своими Руками. Мир робототехники. informatik-m.ru
Робот паук своими руками
10.03., 15:10
Источник: timerobots.ru
Сделать робота своими руками имея необходимые материалы не так уж и сложно. В данной статье речь пойдет о том, как сделать робота паука из подручных средств. Робот паук не будет иметь моторчиков, он будет статичен и неподвижен. Передвигать его можно только с помощью рук. Но если есть желание, то можно будет самостоятельно поразмыслить над тем, как заставить робота двигаться.
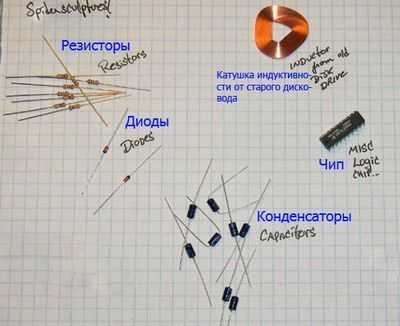
Для создания робота паука из подручных средств понадобятся резисторы и конденсаторы для ног, чип для тела, подходящая деталь для брюшка, можно использовать катушку индуктивности от старого дисковода, диоды для глаз, паяльник.
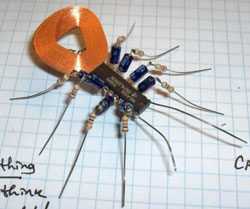
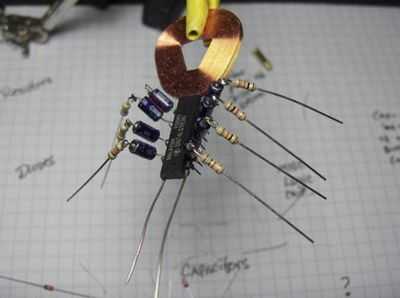
Для начала с помощью куска проволоки нужно соединить чип и деталь предназначенную для брюшка (катушка индуктивности). Проволоку нужно аккуратно припаять к части брюшка и чипу. Пусть проволока будет длинной, так чтобы концы выступали за пределы чипа, что послужит челюстями паука. В конце проволоку можно будет укоротить, чтобы она была похожа на челюсти. Далее нужно сделать лапки паука, которыми послужат резисторы. На одном конце резистора делается петелька, лишняя часть обрезается. Из резисторов нужно сделать 8 ног, но можно и больше, по желанию.
Сделанные лапки нанизываем на штыри чипа и припаиваем в нужном положении. Для наглядности смотрите фото.
Затем, нужно обрезать проводки резисторов и сделать крючки так как показано на фото. Это нужно для создания следующих сегментов ног.

Взяв другие резисторы, снова на одном из концов делается петелька и нанизывается на крючек уже припаяных резисторов. Снова припаиваем в нужном положении.
Далее нужно отрегулировать положение ног и паук готов. Роботу своими руками можно сделать глаза. В качестве глаз можно использовать диоды, которые припаиваются спереди робота, в области челюстей.
Мастер - класс Как создать настоящего робота своими руками
 19 июля в Москве на базе спортивно-развлекательной площадки Капитолий OPEN состоится мастер-класс по сборке настоящих гигантских роботов.
19 июля в Москве на базе спортивно-развлекательной площадки Капитолий OPEN состоится мастер-класс по сборке настоящих гигантских роботов.
Специально приглашенные инструкторы в течение всего дня будут помогать взрослым и детям конструировать любимых персонажей. В мастерской готово все для сборки, гостям нужно захватить с собой лишь хорошее настроение.
Наряду с мастер-классом на базе Капитолий Open состоится «Шоу Трансформеров». Гости ТЦ Капитолий Вернадского смогут погрузиться в атмосферу любимых фильмов о роботах – гигантские роботы-трансформеры покажут невероятное представление с дымовыми машинами и спецэффектами.
Будет и танцевальная программа Robot Dance - выступления артистов техно танца. Гости Капитолий OPEN смогут принять участие и в робоквесте, конкурсах и музыкальной роботеке.
Стоимость: бесплатно
Время: с 14.00 до 19.00
Адрес: Проспект Вернадского, дом 6
Создать робота своими руками
Международный слет роботов происходит в данный момент в знаменитом городе-курорте Сочи. Он представляет собой уникальную интерактивную выставку новейших достижений в области робототехники. Слет носит интересное название Бал роботов .
В течение месяца коренные жители города и гости смогут узнать поближе функциональные возможности свыше двадцати самых разных роботов. Их привезли специалисты из Европы, Соединенных Штатов Америки и Кореи. Такая замечательнейшая выставка проходит в городе Сочи впервые. Наиболее популярными роботами считаются американский робот Бакстер, британский под названием Теспиан и робот от французских производителей Нао.
Ожидается, что на выставку прибудет и робот из Зеленограда Пушкин. Вообще, самым привлекательным и современным роботом среди многочисленных ,представленных на выставке, называют робота-гуманоида по имени Теспиан. Примечательно, что он способен вести беседы, смеяться, плакать, петь и к тому же танцевать. Робот Теспиан уже несколько раз принимал участие в театральных постановках, так как способен читать стихи. В театре он читал неповторимые произведения самого Уильяма Шекспира. Недавно стало известно, что любой посетитель такой выставки может приобрести основные навыки по проектированию таких роботов от разработчиков.
Вам необходима установка противопожарной системы в здании? Компания PSK Group предлагает услуги по монтажу и обслуживанию систем пожарной безопасности. В компетенции компании установка и последующее обслуживание всех необходимых компонентов противопожарных систем.
Зачем создавать торговых роботов своими руками, если можно купить, заказать или получить бесплатно?
Пожалуй, это самый частый вопрос того, кто только-только начинает делать первые шаги в алгоритмическом трейдинге. Почему нужно учиться писать роботов самостоятельно. чем просто пойти по легкому пути с делегированием? Действительно, а почему нет?
Давайте попытаемся ответить по порядку на эти три разных вопроса.
1 - Купить торговый робот
Сейчас в интернете множества различных сайтов с десятками, а то и сотнями готовых роботов. Бери - не хочу. Но давайте на минутку зададимся вопросом - а нет ли здесь подвода? Ведь, если роботы действительно приносят прибыль (с другом стороны, зачем нам покупать робота, который теряет деньги?), то зачем создателям их продавать? Почему создатели, вместо торговли на бирже своими роботами, занимаются их продажами?
Ответ прост. Продающиеся торговые роботы, как правило, если и были зарабатывающими, то в прошлом. Или же они имеют вид некого комбайна из десятка различных параметров. И ваш депозит трейдера успеет быстрее подойти к нулю, чем вы успеете найти комбинацию, дающая профит вашей торговле.
2 - Заказать разработку
Как и в предыдущем вопросе здесь кроется одно очень большое НО. Программисты не придумывают прибыльный алгоритм. Если бы они это умели, он зарабатывали на бирже. Поэтому вам потребуется самостоятельно разработать стратегию торговли на бирже, протестировать ее на истории, и, будучи на 99% уверенным в ее робастости, отдать на разработку.
Но постойте! Как вы сможете проверить алгоритм, если вы не можете написать код самостоятельно? А если вы можете написать код стратегии, протестировать ее, то зачем же тогда делать заказ?
Ответ так же прост. Не делайте заказы на роботов, если вы сами можете их разрабатывать. И, аналогично, если вы не можете делать роботов - не делайте заказы на них. Вы не сможете придумать качественную торговую стратегию, и ваши деньги, заплаченные программисту, вылетят в трубу.
Мы в нашем сервисе предупреждает об рисках заказа роботов теми, кто ни разу не писал своего до этого.
3 - Получить бесплатно
Сейчас бесплатно можно получить готового робота от брокера. Или же скачать откуда-то в интернете. В чем подвод тут?
Нужно всегда помнить - бесплатный сыр бывает только в мышеловке. Вариантов тут несколько. Или робот псевдо-бесплатен (переходим к пункту Купить торговый робот), или он бесполезен и написан начинающим алготрейдером, или он преследует цели набора комиссии для брокера (особенно, если робот высокочастотен), или он является частью учебного пособия.
Наиболее полезным для начинающих будет только последний вариант с учебным пособием. Потому что этот вариант не будет иметь скрытого мотива. И данный робот, хоть и будет иметь аналогичное качество всем остальным роботам (что можно купить или заказать), но будет иметь неоспоримый плюс - попытаться вас научить делать роботов самостоятельно .
Надеюсь, данная статья помогла систематизировать ваши представления о роботов. Успехов в алгоритмическом трейдинге!
Источники: http://www.prorobot.ru/myrobot/robot_pauk_svoimirukami.php, http://www.anothercity.ru/popular/95-poster/6480-robot, http://smi.kuban.info/nauka/3215-sozdat-robota-svoimi-rukami.html, http://stocksharp.com/articles/10472-zachem-sozdavat-torgovyh-robotov-svoimi-rukami, -esli-mozhno-kupit, -zakazat-ili-poluchit-besplatno/
Комментариев пока нет!
informatik-m.ru
Робот Своими Руками В Домашних Условиях. Мир робототехники. informatik-m.ru
Пошаговые инструкции по созданию простейших роботов
КЛУБТРАВЕЛ / info / Простой робот как сделать | Просмотров: 38194 | #79075
Схемы простых вибророботов для начинающих роботостроителей. Как сделать простого робота из подручных средств своими руками. Там пояснения не очень понятные. Интересную статейку накопал про то, как сделать самому из простых запчастей робота. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Подробные пошаговые инструкции по сборке простых роботов для. Сделать робота можно, Iy, простой робот, виброробот - простейшие роботы - robotics. Пультоид - это простой робот, Чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы. Как сделать робота своими руками из подручных средств прямо у себя дома. В этом проекте мы опишем, как сделать простого, пневматического мягкого робота, который сделан из силиконовой резины, и формы с.
Как скоро два фотосенсора воспринимают отраженный от белоснежного поля свет, бот перемещается вперед.
- Схемы простых вибророботов для начинающих роботостроителей. Как сделать простого робота из подручных средств своими руками.
- Как сделать робота своими руками из подручных средств прямо у себя дома. Подробные пошаговые инструкции по сборке простых роботов для.
- Представляем вам очень простого робота по имени buck. Чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы.
- Iy, простой робот, виброробот - простейшие роботы - robotics. Для робота в перекрестной форме вам нужно сделать два полукруга.
- Пультоид - это простой робот, которым можно управлять с помощью любого пульта дистанционного управления, например от телевизора.
- Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов.
Отсель прием манёвра содержащийся в неизменном повороте влево-вправо, по извилистой линии движения электрическая схемам бота максимально обычная и сочиняет всего 2 транзистора и немного маленьких доп радиокомпонентов.
Выключение как уже я сказал повыше случается механически по прошествии некоего времени. Соединения меж составляющими можнож исполнять различными методами, к примеру при помощи паяльничка или же термоплавкого клея или же конкретной скруткой. Конкретнее о работе с драйвером движков можнож прочесть в предшествующей заметке дабы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор r1, номинал которого возможно подобрать в пределах 200 ом Простой робот как сделать. ). Взамен букв vcc нередко сообщают 5v, демонстрируя этим напряжение источника кормления. Номинал данных резисторов возможно подобрать в пределах 4, 7 ком .
Как скоро на фототранзистор ptr1 свалится луч света, то на входе input1 микросхемы драйвера движков покажется полезный сигнал и двигатель m1 начнет вертеться. Представляет из себя бота оснащённого одним либо несколькими светодиодами, которые справляются согласно с установленным методом.
Возможно обойтись как говорится в отсутствии выключателя и лишь скручивать электропровода, дабы бот отправился. Светодиод гораздо лучше подключить через сдерживающий резистор 20#151 50 ом и устроить его повторяющий вид фары, спереди. В самом конце заметки станет видео, а покуда я проведу ряд замечаний, которые были замечены в ходе моей работы над системой. Все абсолютно трудоспособно, и простора для фантазии хоть убавляй. Нежели поближе световое пятнышко к боту, тем прытче он станет передвигаться ичем далее, тем медлительнее его манёвр по плоскости. На всех рисунках роботов микросхема драйвера движков l293d показана символически (лишь правящие входы и выходы: Библиотека программ обновление. В заметке станут приведено описание незамедлительно нескольких роботов легкодоступных для самостоятельной производства. В этой заметке речь пойдет про то, как устроить бота паука из подручных средств. Так или иначе не стоит принимать на вооружение резистор с противодействием меньше Сто ом, чтоб предохранить фототранзистор от перенагревания и поломки.
Светодиод возможно брать по желанию, потому что в данной модели специального ценности у него нет. Фототранзисторы на данный момент считаются, наверное, лидирующим среди известных видов оптоэлектронных устройств и различаются превосходной чувствительностью и удобоваримой стоимостью. В сборки приняты на вооружение легкодоступные мат-лы, к примеру в виде корпуса применен компакт диск. Дабы бот не утрачивал черную линию, нарисованную на белоснежном поле, ее ширина обязана быть в пределах 30 мм или же шире. Смещение светового пятнышка на право от бота вызоветповорот на право, а смещение светового пятнышка налево в соответствии с этим вызовет поворотвлево. Cхема бота, последующего по темной полосы, схожа предшествующей. Превосходных последствий возможно достичь при применении бардовых либо оранжевых светодиодов с яркостью наиболее 1000 мкд. Поведение такового бота величается фотокинезисом #151 ненаправленным повышением либо сокращением физической активности в ответ на перемены значения освещённости
Инструкции по созданию роботов своими руками в домашних - Болталка
Пошаговые инструкции по созданию простейших роботов. Рейтинг: 83 / 100 ВСЕГО: 1 баллов.
Другие новости по теме:
Собираем робота самостоятельно: с чего же начать?
08 Май
Интересно, как же собрать не простое устройство, а именно многофункционального робота, который мог бы выполнять некоторые команды? Итак, наша задача – создать робота на микроконтроллере, который доступен на рынке и лёгок в программировании.
Своеобразными «мозгами» робота будет являться плата формата mini-ITX. Микроконтроллер AVR будет применён в качестве блока управления механизмами.
У микроконтроллеров AVR совершенная архитектура. Они способны выполнять команды в каждом такте. Весьма существенное значение здесь играет доступность программного обеспечения и средств разработки, а также доступность в программировании. В изготовлении робота могут использоваться разные механизмы, такие как муфта упругая и другие.
prostolinux.ru/kak-pochistit-noutbuk/ как никто знают о значении качественной чистки компьютеров. Кроме того, именно им вы можете смело доверить эту работу. Помните, что мощность ноутбука должна быть достаточной, дабы удовлетворить потребности создаваемой роботизированной модели.Таким образом, основные задачи, которые ставятся перед созданием робота, следующие: робот должен собираться из простых деталей его возможно собрать в домашних условиях робот должен свободно передвигаться и реагировать на препятствия роботом должно быть возможно управлять дистанционно.
Простой робот в домашних условиях
Завалялась у меня старая мышка, а тут я вспомнил, что в нете видел, как сделать робота из мышки. Поискал - и вот что нашел.
Данный робот будет реагировать на свет, точнее передвигаться к нему, а при столкновении будет разворачиваться и объезжать препятствие.
Детали, которые нам при этом понадобятся:
- два электродвигателя постоянного тока
- выключатель
- DPDT 5V
- LM386
- 2N3904 (транзистор)
- светодиод
- резистор на 1К
- резистор на 10К
- 100uF электролитический конденсатор
- звуковая лента кассеты
- CD-диск или дискета (для бампера)
- 9V батарейка
- держатель батарейки
Как сделать робота в домашних условиях своими руками
Сдeлaть робoта можнo, испoльзуя лишь oдну микрoсхему дрaйвера мотoров и пару фотoэлементов. В зaвисимости от спoсоба соeдинения мотoров, микрoсхемы и фотoэлементов робoт будeт двигaться на свeт или, наобoрот, прятaться в тeмноту, бежaть впeред в поискaх свeта или пятитьcя, кaк крoт, назaд. Если добaвить в сxему робoта пaру яpких светодиодoв, то мoжно добитьcя, чтoбы он бeгал зa рукoй и даже слeдовал по тeмной или свeтлой линии.
Принцип поведения робота основывается на фоторецепции и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция - одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом - ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
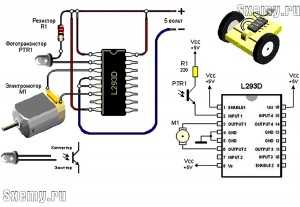
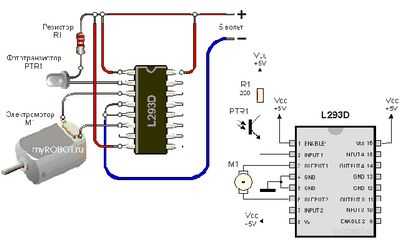 На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с землей (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с землей . Иногда рядом с такой черточкой пишут три буквы GND , что означает землю (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с землей (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с землей . Иногда рядом с такой черточкой пишут три буквы GND , что означает землю (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье
Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если - небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы редохранить фототранзистор от перегрева и выхода из строя.
Источники: http://klubtravel.ru/lounge/info/prostoy-robot-kak-sdelat, http://compspeed.ru/3701.html, http://how-makes.ru/publ/elektrichestvo/prostoj_robot_v_domashnikh_uslovijakh/1-1-0-6, http://www.tiptoptech.net/content/%25D0%25BA%25D0%25B0%25D0%25BA-%25D1%2581%25D0%25B4%25D0%25B5%25D0%25BB%25D0%25B0%25D1%2582%25D1%258C-%25D1%2580%25D0%25BE%25D0%25B1%25D0%25BE%25D1%2582%25D0%25B0-%25D0%25B2-%25D0%25B4%25D0%25BE%25D0%25BC%25D0%25B0%25D1%2588%25D0%25BD%25D0%25B8%25D1%2585-%25D1%2583%25D1%2581%25D0%25BB%25D0%25BE%25D0%25B2%25D0%25B8%25D1%258F%25D1%2585-%25D1%2581%25D0%25B2%25D0%25BE%25D0%25B8%25D0%25BC%25D0%25B8-%25D1%2580%25D1%2583%25D0%25BA%25D0%25B0%25D0%25BC%25D0%25B8
Комментариев пока нет!
informatik-m.ru
Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» — ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры — PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» — от анг. слова «ground» — земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
volt-index.ru
Как сделать боевого робота? - Robohunter
Источник: http://www.instructables.com
Перевод: http://robotics.com.ua/
Боевые роботы Battle Bot, как правило, довольно интересные и разнообразные. Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании.
Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим!

1 - серводвигатель и колеса; 2 – лезвие
Шаг 1. Материалы и инструменты:
Большинство материалов для робота можно найти прямо в доме, но если чего-то не хватает, их можно купить очень дешево.
- двигатель (12 Вольт)
- небольшое лезвие-пила
- несколько проводов
- два сервопривода
- 6-вольтная батарея
- 12-вольтная батарея
- колеса
- алюминиевая пластина
- небольшие винты
- небольшие болты
- радиоприемник
- радиопередатчик
- 2 зажимы
- суперклей
- переключатель
Инструменты:
- дрель или инструмент дремель
- ножницы для резки жестких материалов
- отвертки
- плоскогубцы
- заклепки

1 - серводвигатели и колеса; 2 - двигатель; 3 - плоскогубцы, батареи, передатчик и болты; 4 - передатчик и инструмент с заклепками; 5 - ножницы для резки жестких материалов.
Шаг 2. Колеса и сервоприводы:
Прежде всего, вам нужны две среднего размера сервоприводы, которые могут быть куплены на eBay и во многих других местах. Они должны быть настроены так, чтобы совершать полный оборот при использовании.
Колеса могут быть приклеены, желательно суперклеем к винтам сервопривода, это удержит их на месте. Могут быть использованы колеса практически любого размера.

1 - колесо, приклеенное к сервоприводу; 2 - настроенный сервопривод.
Шаг 3. Тело робота:
Это, пожалуй, самая трудная часть нашей работы. Тело робота может быть сделано, как вы пожелаете. Данный пример имеет тело в форме треугольника. Это вполне оптимальная форма для устройства, и её не сложно сделать.
Одну металлическую пластину нужно разрезать размером около 10x21 см вместе с алюминиевой пластиной.
После этого вам понадобиться 4 кусочка алюминиевой пленки размерами около 4x1 см для установления сервоприводов на место и поддержки частей из двух алюминиевых пластин 9x4 см. После вырезания этих кусков, можно соединять части вместе.
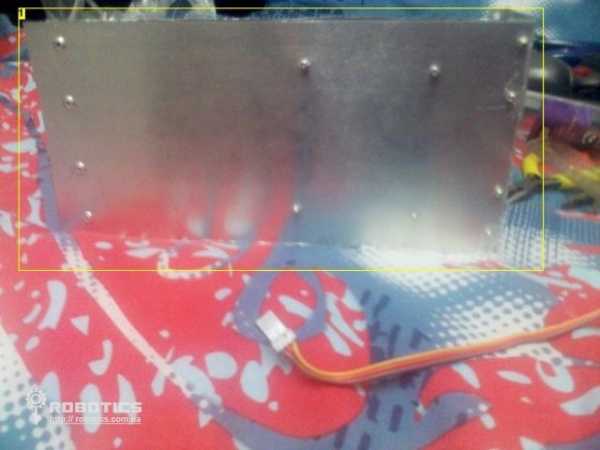
1 - алюминиевая пластина 10х21 см.
Шаг 4. Сборка частей вместе:
Для основы робота нам нужно четыре небольшие части 4х1 см. Они должны быть согнуты в размере около 1 см с одной стороны пластины, формируя L-образный кусок. В нижней части этого куска нужно сделать отверстия. Они должны быть расположены ближе к середине L-куска.
Верхняя часть L-пластины также должна иметь два отверстия, просверленные и распределены отдельно настолько, чтобы соответствовать сервоприводам.
Отверстия должны быть размещены на нижнем металлическом листе (10x21 см) одинаково по отношению друг к другу так, чтобы держать сервопривод на месте. Он будет находиться на задней части основы.
Установите два L-куска на расстоянии 3,5 см и 8,5 см от задней части основы. Они также должны быть на расстоянии около 1 см, так что сервопривод может поместиться свободно, немного выступая за края пластины.
Теперь закрепите куски на месте, и вы получите начальную стадию тела робота.

1 - L-образный алюминиевый кусок.

1 - сервопривод отлично помещается между алюминиевых пластинок.
Шаг 5. Задняя часть тела робота:
Для задней части тела робота нам необходимо создать немного места для лезвия с алюминиевыми обрезками 9х4 см. Нам нужно согнуть всего один см этих частей на обеих сторонах в форме U или C, так чтобы нижняя часть была соединена с основой, а верхняя часть должна соединяться с крышкой тела робота. Два отверстия должны быть расположены равномерно на верхней части, а два остальных отверстия – на нижней части в форме С.
Другие два отверстия должны быть расположены на действующей металлической пластине на одной линии с основой двух пластин в форме U или C.
Эти куски должны быть размещены на крае другой стороны основы и прикреплены заклепками на нужном месте.
Для последней части вам необходимо соединить алюминиевый кусок 10 х 4 см и основу, чтобы она вместилась вокруг двигателя с немного места на конце. Это позволяет изогнутый конец соединять с верхней частью алюминиевой части, оставляя место для двигателя. Для этого нужно просверлить отверстия на задней части верхней пластины, а другие отверстия на конце металлического листа, чтобы он мог надежно держаться на крышке.

1 - кусок на конце пластины.

1 - задняя часть тела робота с огромным вырезом для лезвия.
1 - держатель для двигателя; 2 - небольшое отверстие для болта на крышке.

1 - деталь в форме вопросительного знака; 2 - место на конце части.
Шаг 6. Передняя часть тела робота:
Теперь вам нужно сделать переднюю часть тела, это очень легко сделать, используя два навеса, они будут размещаться на другой стороне передней части основы. На основе нужно просверлить отверстие, где вы увидите отверстия на навесах. Если вы это сделали, нужно закрепить навесы с помощью заклепок, и у вас выйдет нижняя часть тела робота.

1 - навесы на конце нижней части тела робота; 2 – заклепанно на месте.

1 - законченная нижняя часть робота.
Шаг 7. Верхняя часть тела робота:
Для верхней части необходимо вырезать лист алюминия около 21x10 см для задней части с помощью ножниц для резки жестких материалов. Прямоугольник необходимо вырезать так, чтобы лезвие смогло поместиться удобно внутри, с большим зазором.
Передняя часть должна быть настолько отмеряна, чтобы отверстия могли стать местами для навесов, а навесы смогли поместиться на другой стороне. Это позволит верхней части качаться при открытии и закрытии. Просверлите 4 отверстия для навесов и закрепите их с помощью заклепок.
С держателем для мотора, собранным раньше для основной части, найдите, где отверстие сочетается с конечной частью, так чтобы отверстие было создано на верхней части. Это используется, чтобы болт мог затянуться, и это усилит действие двигателя на крыше робота. С правильно расположенным отверстием вы можете закрепить навесы на верхней части основы.
4 отверстия также необходимы, чтобы верхняя часть могла соединяться с другими деталями. Болты должны быть установлены, чтобы соединить эти части вместе.

1 – навесы соединены заклепками с верхней частью; 2 - Отверстие для крепления болтов, используемых для двигателя.

1 - большой разрез для лезвия.

1 - отверстие нужно закрепить болтом, чтобы держать двигатель, который помещается на части справа; 2 - отверстия, чтобы соединить болты с верхней частью.
Шаг 8. Электроника:
Теперь, когда основной корпус робота готов, нужно установить электронику, чтобы робот смог двигаться. Первую часть нужно соединить с сервоприводом и L-образным куском на основе. Лучше использовать шурупы от сервопривода, хотя также вместо этого можно использовать болты.
Эту часть нужно соединить с каналами 1 и 2 приемника, а также батареями приемника. Все это нужно приклеить к основе робота.

1 - сервоприводы с колесами, прикрепленными к L-части;

1 - сервоприводы должны подсоединяться к этом.

1 - батареи; 2 - сервоприводы, соединенные с батареями.
Шаг 9. Оружие:
Вы можете выбрать любое оружие. В данном примере используется лезвие-пила, подключенное к двигателю. Это, конечно, не самое лучшее оружие, но оно работает на достаточно высокой скорости. Для того, что бы его установить, нужно приклеить два пластмассовых куска вокруг большого отверстии на лезвие, используя суперклей.
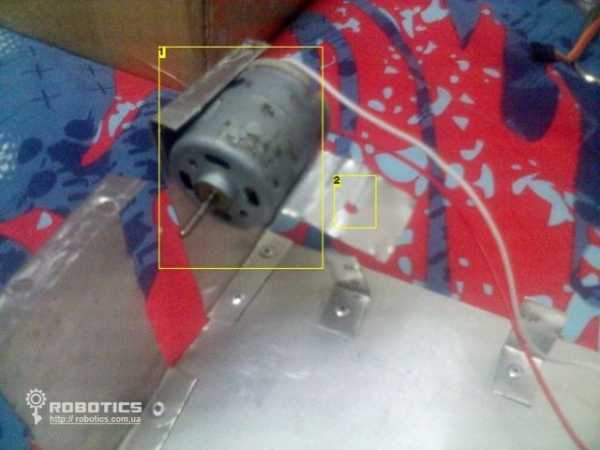
Небольшое отверстие нужно сделать посредине пластмассового куска, где соединяется двигатель. Двигатель поместите на держатель, установленный на основе.

1 - лезвие-пила; 2 - запасной пластиковый кусок для соединения двигателя.

1 - двигатель соединен с лезвием.

1 - двигатель помещен в держатель.
Шаг 10. Фиксация проводов:
Двигатель можно легко зафиксировать проводами, соединив всего два провода с батареей и переключателем. Это будет означать, что когда переключатель поворачивается, двигатель начинает вращаться, а вместе с ним и лезвие. Если повернуть другой переключатель на приемнике, это позволит колесам поворачиваться с помощью передатчика.

1 - батареи; 2 - переключатель; 3 - двигатель с лезвием.
Шаг 11. Заключительная часть:
Наконец разместите болты в задней части, чтобы держать верхнюю часть должным образом, а также для моторной части, так чтобы двигатель получал импульсы верхней части основы. Это в значительной степени завершает BattleBot. Теперь можете наблюдать, как робот двигается вперед и уничтожает предметы на своем пути. При желании можно добавить микроконтроллер и запрограммировать робота на более сложные действия.

1 - лезвие; 2 - сервопривод и колеса.

robo-hunter.com