Содержание
Сколтех: рой двухколёсных роботов предлагают отправить на Марс — Поиск
05.04.2022
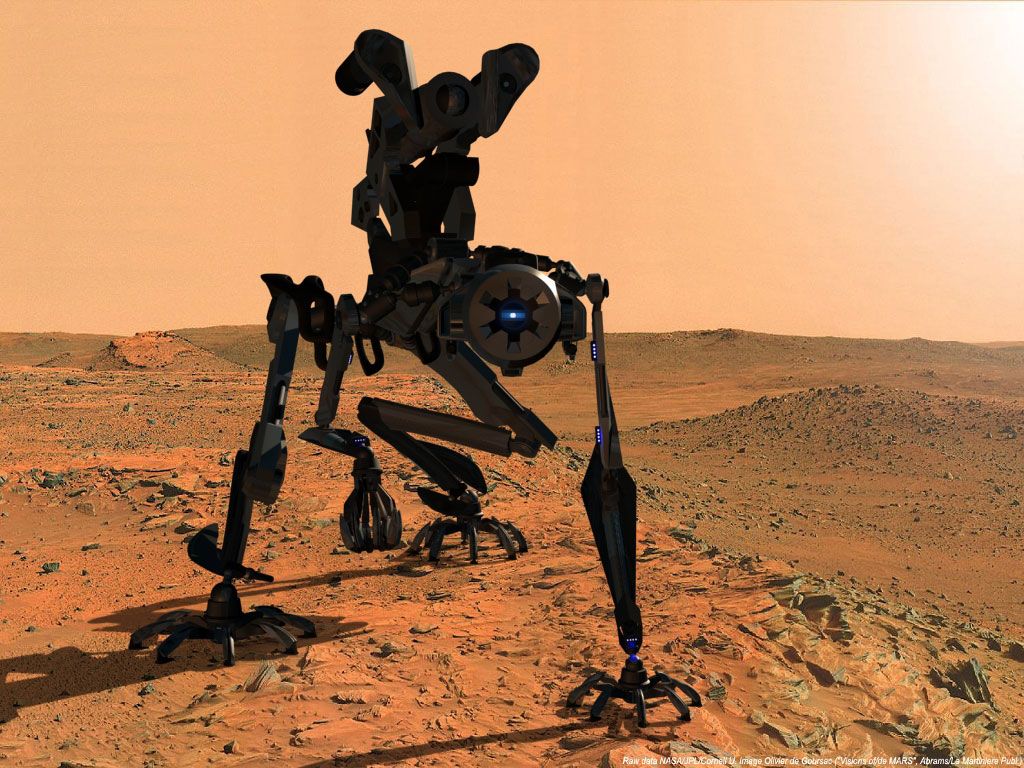
Учёные из Сколтеха представили концепцию модульного марсохода. В её основу положен принцип кооперативной робототехники: аппарат разделяется на четыре двухколёсных робота, которые могут функционировать независимо или состыковываться в разных комбинациях. В своей статье в журнале Acta Astronautica научный коллектив показывает, что модульный дизайн в разы увеличит время активной работы на Марсе, а значит, и количество собранной информации об истории планеты, её обитаемости и наличии следов жизни и воды.
«Группа роботов, вертолёт Ingenuity и марсоход Perseverance, уже используются НАСА на Марсе. Такая схема даёт возможность задействовать преимущества каждого агента гетерогенной системы. Например, беспилотный вертолёт, обладая высокой скорость и возможностью обозревать пространство с высоты, позволяет планировать движение тихоходного мобильного робота», — рассказывает Дмитрий Тетерюков, доцент Сколтеха, руководитель Лаборатории интеллектуальной космической робототехники.

Однако с тех пор как в 1997 году на Марс впервые успешно приземлился мобильный исследовательский аппарат — запущенный НАСА Sojourner — основное устройство планетоходов не сильно изменилось: в частности, вся научная аппаратура перемещается на шестиколёсном мобильном роботе. Однако работающие в области групповой робототехники учёные предполагают, что за время одной миссии на Марс можно получить больше результатов, если отправить на Красную планету несколько роботов размером поменьше, которые оснащены разным оборудованием и могут как разъезжаться в разных направлениях, так и состыковываться для выполнения более сложных задач.
«Рой двухколёсных роботов способен объединить усилия, например, для исследования поверхности либо перемещения массивных объектов. Вместо того чтобы отправлять тяжёлый и энергозатратный марсоход, исследовательскую миссию можно выполнить используя уникальный набор двухколёсных роботов, каждый из которых несёт на борту свой инструмент — например, георадар, или спектрометр, или оборудование для сбора проб.
А формируя связанную цепочку, роботы станут способны транспортировать тяжёлые или крупногабаритные объекты», — говорит Тетерюков.
 А формируя связанную цепочку, роботы станут способны транспортировать тяжёлые или крупногабаритные объекты», — говорит Тетерюков.
А формируя связанную цепочку, роботы станут способны транспортировать тяжёлые или крупногабаритные объекты», — говорит Тетерюков.Первый автор статьи, аспирант Сколтеха Александр Петровский уточняет: «По сути, мы решали задачу по оптимизации: как добиться наибольшего времени работы и покрыть максимальное расстояние, не раздув донельзя бюджет. Оказалось, что шестиколёсный планетоход — не лучшее решение. По нашим расчётам, оптимальный вариант — это четыре двухколёсных аппарата. У каждого на борту — разные инструменты, и лишь критическая полезная нагрузка продублирована во всех четырёх модулях».
Решение предполагает, что даже в случае выхода из строя трёх роботов последний, четвёртый сможет продолжить выполнять часть исследовательских задач в одиночку, передавать информацию на Землю и к моменту полного завершения миссии будет достигнут больший прогресс. В то же самое время некоторые действия — например, хватание образцов грунта — требуют повышенной устойчивости. Для этого два робота могут пристыковаться друг к другу.
«Вообще, риск перевернуться — это основной недостаток, и по остальным рассмотренным нами параметрам группировка из четырёх роботов смотрится выигрышно или по крайней мере не особенно уступает стандартному марсоходу, — добавляет Петровский. — И даже в этом смысле двухколёсные роботы довольно сильно „шагнули“ вперёд, так что неустойчивость — это уже не такая большая проблема, как раньше».
По словам учёных, технологии кооперативной робототехники, которые разрабатываются для Марса, могут пригодиться и на Луне, и даже на Земле. Группировки подобных двухколёсных роботов можно, например, использовать для мониторинга роста сельхозкультур и обнаружения вредителей и больных растений. «Мы уже проводили испытания на полях в Краснодарском крае — в июле 2021 года», — рассказывает Петровский. Модульный подход можно применить и к поисково-спасательным роботам.
«Технологии искусственного интеллекта, управляющие роем мобильных роботов, позволят перейти на новый технологический уровень исследования и освоения планет.
 Важным преимуществом использования архитектуры роя роботов станет и возможность создания марсианского интернета на основе mesh-сетей для надёжной передачи собранных данных, в том числе с целью построения точной карты поверхности Марса», — дополняет Тетерюков.
Важным преимуществом использования архитектуры роя роботов станет и возможность создания марсианского интернета на основе mesh-сетей для надёжной передачи собранных данных, в том числе с целью построения точной карты поверхности Марса», — дополняет Тетерюков.
Сколтех
Робот будет искать жизнь на Марсе
Вслух.ru
Новости
Обзор
Обзор
Вслух.ру
25 ноября 2011, 15:40
Специалисты NASA объявили о готовности к запуску на Марс робота под названием Curiosity («Любопытство»). Одной из главных задач марсохода станет поиск следов органической жизни на планете.
Специалисты NASA объявили о готовности к запуску на Марс робота под названием Curiosity («Любопытство»). Одной из главных задач марсохода станет поиск следов органической жизни на планете. Curiosity отправится в космическое путешествие уже завтра, сообщает британское издание The Telegraph.
В 17.00 по московскому времени ракету-носитель Atlas V выведут из ангара и установят на пусковую площадку космодрома на мысе Канаверал. Ракета доставит марсоход на околоземную орбиту. Аппарат выйдет на траекторию к Марсу и долетит до него в августе следующего года.
Ракета доставит марсоход на околоземную орбиту. Аппарат выйдет на траекторию к Марсу и долетит до него в августе следующего года.
Космический проект «Любопытство обошелся NASA по одним данным в 1,6, а по другим — в 2,5 миллиарда долларов. Марсоход сопоставим по размеру с малолитражным автомобилем, сообщает Вести.ру.
Несмотря на то, что специалисты NASA твердо уверены в успехе своей марсианской миссии, некоторые специалисты с напряжением ждут того часа, когда Curiosity начнет приземляться на поверхность Марса. В условиях земной гравитации ученые не смогли полностью воссоздать все непредвиденные обстоятельства, с которыми придется столкнуться марсоходу.
Марсоход «Любопытство» приземлится в районе кратера Гейл, где много минералов и сульфатов, которые могут жить только в теплой и влажной среде.
«Любопытство» проведет на Марсе два земных года, в течение которых аппарат пройдет по поверхности Красной планеты 20 километров. Все это время он будет брать пробы инопланетной почвы и отсылать их на Землю.
Неудобно на сайте? Читайте самое интересное в Telegram и самое полезное в Яндекс-Дзен.
Последние новости
Вслух.ру
12 октября, 21:21
Для зверей в ямальских лесах поставили кормушки с солью
Это поможет им зимой избежать дефицита важного минерала.
#животные
#кормушки
#ЯНАО
#зима
Вслух.ру
12 октября, 20:56
Тюменские специалисты службы занятости проконсультируют граждан старшего возраста по поводу работы
Публикуем актуальные номера телефонов.
#занятость
#население
#работа
#старшее поколение
#Работа России
#кадровый центр
#Тюменская область
Вслух.ру
12 октября, 20:14
Непонятливому водителю грозит два года тюрьмы
Он во второй раз попал в поле зрения ГИБДД, будучи нетрезвым.
#пьяное вождение
#ГИБДД
#суд
#Тюменская область
#дорога
Вслух.ру
12 октября, 19:00
Трудолюбивый житель Антипино вырастил плантацию конопли
Ему грозит восемь лет заключения.
#наркотики
#конопля
#преступление
#уголовное дело
#полиция
#новости Тюмени
Вслух.ру
12 октября, 18:01
Семь тюменцев поколения 50+ представят область в финале Национального чемпионата «Навыки мудрых»
Чемпионат пройдет по 30 компетенциям.
#чемпионат
#рабочий
#профессия
#навык
#Тюменская область
От студгородка к кампусу: история общежитий с 1930-х годов до наших дней
Секреты и триумфы тюменского ковра
Исследование Красной планеты с помощью роботов
Почти полвека мы исследуем Красную планету с помощью роботов. Оглянитесь вместе с нами на посадочные модули, вездеходы и вертолеты, которые исследовали Марс, и кое-что из того, чему мы научились у них.
Посадочный модуль Viking 1 и 2
На этой фотографии показана тестовая версия посадочных модулей в оригинальной «Марсианской верфи», построенной в Лаборатории реактивного движения НАСА в 1975 году. Предоставлено НАСА/Лаборатории реактивного движения-Калифорнийский технологический институт/Университет Аризоны.
Предоставлено НАСА/Лаборатории реактивного движения-Калифорнийский технологический институт/Университет Аризоны.
«Почти все, что связано с Viking , мы пробовали впервые», — сказал Мэтт Шинделл, куратор планетарной науки и исследований. «НАСА никогда не приземлялось на другую планету. Они никогда не строили миниатюрную лабораторию. Никто никогда не создавал компьютер, который мог бы выдержать любые нагрузки, которым подвергался Viking. Инженерам приходилось проектировать вещи, которые никогда раньше не делались».
Посадочные модули были первым аппаратом, работавшим на Марсе в течение длительного времени. Они предоставили изображения, информацию о погоде и другие данные за более чем четыре года (посадочный модуль 1) и шесть лет (посадочный модуль 2). Они также проводили эксперименты по поиску признаков жизни. Результаты были в основном отрицательными, но остаются неубедительными.
Узнайте больше о спускаемом аппарате, создавшем историю
Следопыт и
Странник
Марсоход Sojourner приземлился вместе с посадочным модулем Pathfinder и отправился на Марс. «Соджорнер» стал первым разом, когда мы «бродили» по Марсу, а не исследовали его в одном месте с помощью посадочного модуля.
«Соджорнер» стал первым разом, когда мы «бродили» по Марсу, а не исследовали его в одном месте с помощью посадочного модуля.
Марсоход на этом изображении назван Marie Curie в честь знаменитого ученого, впервые изучавшего радиоактивность. Мария Кюри было запасным рейсом Sojourner . Предоставлено Смитсоновским национальным музеем авиации и космонавтики.
Pathfinder имел телекамеру и научные инструменты для сбора научных данных о марсианской атмосфере и погоде, а также солнечные батареи для обеспечения питания и связи. Посадочный модуль проработал более 90 дней, в течение которых он передал 2,3 гигабита данных, включая данные, собранные марсоходом Sojourner .
Прототип спускаемого аппарата Mars Pathfinder на выставке в Центре Удвар-Хейзи. Предоставлено Смитсоновским национальным музеем авиации и космонавтики.
Миссия предоставила прорывные данные о Марсе. Доктор Эллен Стофан объяснила: «Из данных с орбиты мы знали, что на Марсе есть эти огромные каналы, которые, как мы думали, были вырезаны водой, но Pathfinder и марсоход Sojourner действительно дали нам первое свидетельство того, что камни на поверхности показал много признаков того, что он был отложен и изменен водой. Это дает вам знание, что это был не просто момент времени воды, что вода должна была сохраняться в течение десятков миллионов лет, если не сотен миллионов лет».
Это дает вам знание, что это был не просто момент времени воды, что вода должна была сохраняться в течение десятков миллионов лет, если не сотен миллионов лет».
Посмотреть прототип посадочного модуля Mars Pathfinder
Посмотреть тестовую машину для Sojourner
Узнайте больше о Sojourner и Pathfinder
Дух и Возможность
Spirit и Opportunity , марсоходы-близнецы, были следующими роботами, которых мы отправили исследовать Марс.
Важным фактором при выборе места посадки марсохода Mars Exploration Rover был поиск свидетельств наличия воды на Марсе в какой-то момент в прошлом планеты, поскольку считается, что вода необходима для развития жизни.
«Селфи» Духа. Изображение предоставлено NASA/JPL.
Spirit был отправлен на дно 140-километрового (90-мильного) кратера по имени Гусев, потому что геологи полагали, что когда-то в нем могло быть большое озеро.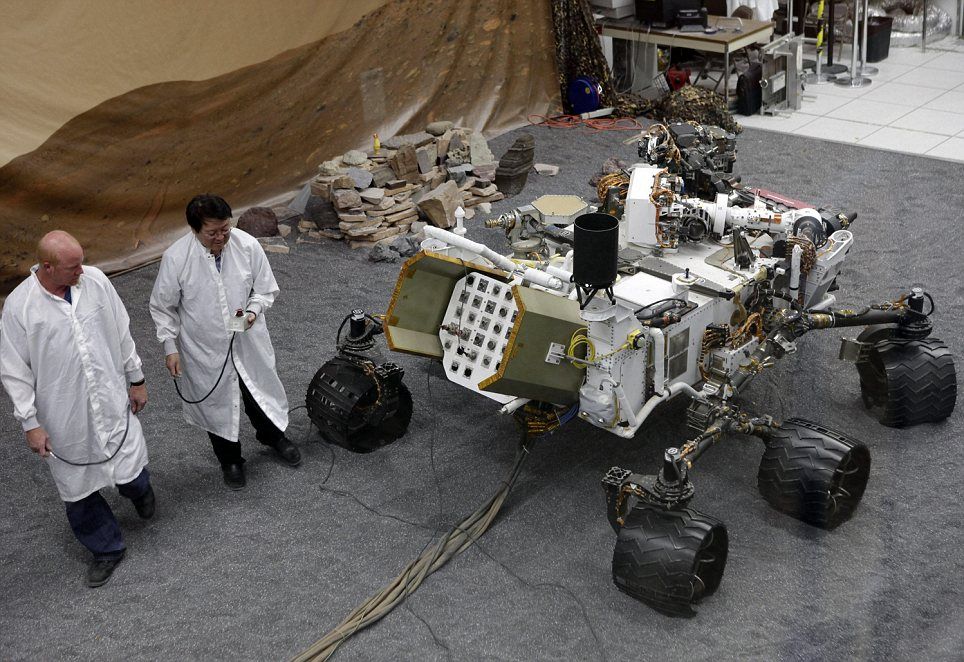
Кочевой маршрут Spirit включал восхождение на Холм Мужа. Вершина Холма Мужа давала Spirit панорамный вид на окружающие равнины, которые часто проносились кружащимися столбами ветра и пыли, называемыми пылевыми вихрями. Состоящие из смеси древних горных пород, измененных взаимодействием с водой, Колумбийские холмы кажутся старше, чем равнины, покрытые лавой. Ученые не уверены, образовались ли камни в результате удара, вулканизма или какого-то другого процесса. Но их сложность и измененное состояние указывают на то время, когда Марс был геологически активным и влажным.
Spirit провел большую часть своего второго года на Марсе, исследуя Домашнюю Плейту, область в бассейне, окруженном Холмами Колумбия. Марсоход обнаружил, что Домашняя плита, вероятно, является эродированной вулканической структурой, которая могла образоваться, когда горячая лава извергалась через влажные скалы.
Большая часть равнин Meridiani Planum, видимая марсоходом Opportunity, плоская, безликая и покрытая песчаными дюнами. Предоставлено НАСА/Лаборатории реактивного движения/Корнелл.
Предоставлено НАСА/Лаборатории реактивного движения/Корнелл.
«Возможность » была отправлена на Меридианское плоскогорье, гладкую область вблизи марсианского экватора. Основываясь на инфракрасных измерениях, сделанных с орбиты, ученые пришли к выводу, что на поверхности много гематита, богатого железом минерала, который часто образуется там, где присутствует вода. В этом районе также были выходы светлых пород, которые могли образоваться из отложений, а не из лавы. С места приземления в кратере Орла, Opportunity отправился к кратеру Виктория, примерно в 10 километрах (6 милях) от него.
Opportunity обнаружил множество крошечных конкреций сферической формы, получивших название «черника», которые были богаты гематитом и, вероятно, были образованы водой под поверхностью.
Opportunity обнаружил, что светлые скалы в этом районе имеют волнистые слои, пересекающие друг друга наборами, что геологи называют косой слоистостью. На Земле эти ряби в горных породах образуются, когда неглубокая проточная вода откладывает мелкие отложения, которые затем покрываются переносимыми ветром отложениями в засушливые периоды. Итак, камни, найденные Возможность результат многократного осаждения ветром и водой. Ученые, изучающие химический состав горных пород в кратере Орла, также обнаружили доказательства того, что эта вода была очень кислой.
Итак, камни, найденные Возможность результат многократного осаждения ветром и водой. Ученые, изучающие химический состав горных пород в кратере Орла, также обнаружили доказательства того, что эта вода была очень кислой.
Феникс
Художественное изображение посадочного модуля Phoenix Mars. Предоставлено НАСА.
Марсоход «Феникс» сел в арктической области Марса в 2008 году. Его задачей было изучить историю отложений полярного льда и их влияние на марсианский климат, а также выяснить, могла ли эта область когда-либо поддерживать жизнь. Он работал в течение пяти месяцев, собирая данные о свойствах почвы и отправляя более 25 000 изображений полярной местности, скал и почвы.
Любопытство
Автопортрет марсохода НАСА Curiosity на площадке «Мохаве» на горе Шарп. Предоставлено NASA/JPL-Caltech/MSSS.
Curiosity опробовал новый способ посадки на Марс. При весе более 900 кг (2000 фунтов) Curiosity не мог использовать обычную систему подушек безопасности, которая облегчала посадку предыдущих марсоходов. Вместо этого инновационная технология под названием «Небесный кран» осуществила спуск с двигателем за 9 секунд.0008 Curiosity подвешен под ним. Когда компьютеры обнаружили, что марсоход касается земли, соединение было разорвано, и Sky Crane намеренно разбился на безопасном расстоянии от Curiosity . Система посадки Sky Crane предложила точный способ посадки тяжелого вездехода.
Вместо этого инновационная технология под названием «Небесный кран» осуществила спуск с двигателем за 9 секунд.0008 Curiosity подвешен под ним. Когда компьютеры обнаружили, что марсоход касается земли, соединение было разорвано, и Sky Crane намеренно разбился на безопасном расстоянии от Curiosity . Система посадки Sky Crane предложила точный способ посадки тяжелого вездехода.
После приземления в 2012 году Curiosity начал многолетнюю миссию по исследованию кратера Гейла, в котором, как считалось, находилось древнее озеро, и восхождению на гору Шарп в его центре. Любопытство принес на поверхность красной планеты внушительную лабораторию наук о жизни, которая вполне может помочь решить без серьезных вопросов, существовала ли когда-либо жизнь на Марсе. Этот марсоход — первая полномасштабная астробиологическая миссия на Марс со времен спускаемых аппаратов «Викинг» в 1976 году. Проследив за водой и найдя доказательства этого, Curiosity теперь пытается ответить, мог ли Марс поддерживать — или может все еще поддерживать — жизнь.
Вид модели Curiosity
Инсайт
Иллюстрация посадочного модуля InSight на поверхности Марса. Предоставлено NASA/JPL-CalTech.
InSight отличился от других посадочных модулей, изучая то, что происходит под поверхностью Марса. Среди инструментов, которые он носил с собой, были сейсмометр для поиска и изучения марсианских землетрясений и тепловые зонды, способные исследовать глубину до 16 футов под поверхностью.
Прослушайте подкаст и узнайте больше о InSight
Настойчивость и Изобретательность
Perseverance — последний марсоход, приземлившийся на Марсе, и он принес с собой небольшой вертолет под названием Ingenuity .
Селфи, сделанное марсоходом Perseverance на фоне марсианского вертолета Ingenuity . Предоставлено NASA/JPL-Caltech.
Настойчивость ищет признаки древней жизни и собирает образцы горных пород, которые впоследствии могут быть возвращены на Землю. Приземлившись в кратере Джезеро, «Перси» исследует древнее озеро и отложения дельты, чтобы определить, на что было похоже древнее озеро и есть ли какие-либо сохранившиеся биосигнатуры, связанные с жизнью на Марсе.
Приземлившись в кратере Джезеро, «Перси» исследует древнее озеро и отложения дельты, чтобы определить, на что было похоже древнее озеро и есть ли какие-либо сохранившиеся биосигнатуры, связанные с жизнью на Марсе.
В 2021 году вертолет Ingenuity совершил первый полет на другом мире. Предоставлено НАСА.
Изобретательность совершил первый управляемый полет на другой планете. В то время как на Марсе гравитация ниже, примерно в три раза меньше, чем на Земле, его атмосфера плотнее всего на один процент, что значительно усложняет задачу вертолета оторваться от земли. Во время полета Ingenuity может исследовать марсианский пейзаж.
Узнать больше о Настойчивость и Изобретательность
НАСА обучает человекоподобных роботов исследовать пещеры на Марсе
Пространство
Софи Льюис
/ Новости Си-Би-Эс
Новый марсоход, вертолет выполняет миссию на Марсе
Марсоход Perseverance, вертолет Ingenuity и поиск древней жизни на Марсе
13:47
При поиске признаков жизни на других планетах ученые говорят, что пещеры являются ключевым местом для поиска. Но как команда на Земле может эффективно исследовать запутанные, темные, незнакомые ландшафты другого мира?
НАСА и Boston Dynamics нашли ответ: полностью автономные роботы.
Пещеры являются одним из наиболее вероятных мест, где можно найти признаки как настоящей, так и прошлой жизни на других планетах, потому что они способны защищать жизнь от космических лучей и экстремальных колебаний температуры вокруг нашей Солнечной системы. Проект НАСА под названием BRAILLE в настоящее время работает над исследованием марсианских пещер, которые уже существуют на Земле, чтобы отточить ключевые технологии для будущих миссий.
Проект НАСА под названием BRAILLE в настоящее время работает над исследованием марсианских пещер, которые уже существуют на Земле, чтобы отточить ключевые технологии для будущих миссий.
По словам исследователей, проект позволил впервые в истории полностью автономным роботам исследовать пещеры такого типа, которые имеют длину несколько сотен метров и ограничивают связь с поверхностью. Пока роботы исследуют, не имея предварительной информации об окружающей среде, группа исследователей за пределами пещеры одновременно выполняет действия, которые ученые на Земле выполняли бы во время настоящей марсианской миссии.
Робот Boston Dynamics SPOT исследует пещеру, похожую на Марс.
НАСА/Лаборатория реактивного движения
Исследование, которое, по словам руководителя проекта Али Ага, может «фундаментально изменить наши представления о будущих миссиях», в настоящее время находится на третьем из четвертых лет в его стремлении отправиться на Луну, Красную планету и дальше.
Но исследователи заинтересованы в исследовании пещер не только в поиске признаков жизни, но и по другой причине: пещеры представляют собой очевидное естественное убежище для будущих астронавтов, исследующих Марс или Луну.
«Будущие потенциальные исследовательские миссии человека могут извлечь выгоду из роботов по-разному», — сказал Ага CBS News. «В частности, роботы могут быть отправлены в предварительные миссии, чтобы предоставить больше информации о пункте назначения до того, как люди приземлятся в этих пунктах назначения. «миссии безопаснее и эффективнее».
Итак, чем разработка марсианского робота отличается от разработки земного робота? По словам Ага, они во многом похожи, особенно когда речь идет о мозге робота с искусственным интеллектом, называемом NeBula, и его способности обрабатывать информацию и принимать решения, когда у них нет контакта с учеными на Земле.
В поисках жизни: NASA JPL исследует марсианские пещеры
Boston Dynamics на
YouTube
Но когда дело доходит до тела робота, тут все становится сложнее. Ученым необходимо учитывать управление температурой, защиту роботов от радиации, а также серьезные ограничения мощности и энергии, связанные с путешествием в далекий мир — все аспекты, которые ранее не рассматривались на Земле.
Ученым необходимо учитывать управление температурой, защиту роботов от радиации, а также серьезные ограничения мощности и энергии, связанные с путешествием в далекий мир — все аспекты, которые ранее не рассматривались на Земле.
Робот Spot от Boston Dynamics оказался чрезвычайно жизнеспособным телом для NeBula.
«SPOT — один из самых способных роботов, которые у нас есть, и удивительно видеть, как он успешно реагирует на решения и команды высокого уровня, исходящие от мозга робота, и как он может сохранять устойчивость на пересеченной и экстремальной местности», — Ага. сказал. «В дополнение к нашим способным традиционным колесным марсоходам способность «ходить» является огромным преимуществом при работе с неровной местностью без дорог и плоских поверхностей».
Успех робота определяется тремя основными факторами:
- Он должен быть в состоянии нести достаточную нагрузку для своих глаз, ушей и мозга, чтобы иметь возможность пересекать сложные марсианские или лунные ландшафты.
- Он должен нести значительное количество научных инструментов.
- Он должен доказать, что может поддерживать «разумный» уровень стабильности, скорости и выносливости в другом мире.

«У нас есть несколько мобильных роботов, которые могут нести разные инструменты, в отличие от одного большого робота, у которого возникнут проблемы с перемещением по местности», — сказал заместитель руководителя проекта Бенджамин Моррелл, имея в виду прошлые марсианские вездеходы.
Али Ага, руководитель проекта, JPL NeBula Autonomy and AI, Лаборатория реактивного движения НАСА, Калифорнийский технологический институт, с роботом Boston Dynamics.
НАСА/Лаборатория реактивного движения
«Робот Boston Dynamics Spot — один из немногих роботов, которые одновременно удовлетворяют всем этим требованиям, — сказал Ага. «Поэтому интеграция нашего роботизированного мозга NeBula в Spot раздвинула границы возможного в исследовании неизвестных марсоподобных сред».
Роботы, как правило, не могут общаться внутри пещеры, поэтому ученые с нетерпением ждут их возвращения на поверхность для получения данных, которые могут включать трехмерную карту внутренней части пещеры, информацию о научных целях или общие сведения об окружающей среде.
Некоторые из роботов также снабжены руками, чтобы приносить небольшие образцы со стен пещеры для анализа. Исследователи надеются, что эти роботы смогут автономно выполнять части будущих миссий в космосе после того, как люди выработают к ним определенный уровень доверия.
«Тело роботов следующего поколения и возможности механического передвижения позволят выполнять новые типы миссий над местностью, которая иначе была бы недоступна для традиционных марсоходов», — сказал Ага. «Кроме того, из-за увеличенной скорости и возможностей перемещения будущие миссии могут быть нацелены на пункты назначения, которые традиционно считаются слишком удаленными от пригодных для посадки регионов на Марсе».