Содержание
Salamandra Robotica II — робот-амфибия, который плавает в воде и ползает по земле / Хабр
Если вы фанат робота-собаки или робота-гепарда от Boston Dynamics, вы наверняка знаете, что для создания своих творений инженеры черпали вдохновение у наземных животных. Что же касается воды, существует масса роботов-рыб и беспилотных подводных аппаратов, которые могут соревноваться в ряде задач (к примеру, поиск подводных мин) даже с дельфинами.
Но как насчет робота, который может перебираться из воды на землю и опять в воду?
Это непростая проблема, над которой инженеры из лаборатории EPFL Biorobotics в Швейцарии и Университета Бордо во Франции работают уже несколько лет. В 2007 группа разработчиков опубликовала статью в журнале Science, анонсировав разработку саламандра-подобного робота с четырьмя ногами и подвижным позвоночником. Теперь они представили следующее поколение робота-амфибии, названного Salamandra Robotica II. Новая версия быстрее и надежнее предыдущей. Все улучшения были получены в результате более глубокого изучения двигательной системы животного.
Это робот, которой может «ходить» как ящерица, ползти как змея и плавать как рыба, всего лишь изменяя силу управляющего сигнала.
Передвижение по земле достигается вращением конечностей, а вот плавание — на порядок более сложная задача, требующая нелинейных колебательных движений.
Дистанционно управляемый робот может менять режимы движения просто регулируя силу сигнала, идущую по позвоночнику. И неспроста. Профессор Ijspeert и его коллеги намеренно проектировали управляющую систему робота по подобию нервной системы саламандры, поэтому нейроподобные цепи проходят через его «спинной мозг». Сигнал исходит из «мозга» и проходит по всей длине робота, симулируя биологическую модель саламандры.
Другая интересная особенность этого робота — это модульный дизайн, за счет которого его можно очень просто сделать длиннее или короче. Модульность роботов вообще очень занимательна, т.к. большая структура может быть построена из простых компонентов по мере наращивания функционала, как детальки Lego или биологические клетки используются для создания более сложных структур. На одном из видео на сайте группы, робот теряет свой хвост, но обе части продолжают функционировать. Другой разделяется на три отдельные части, и каждая из них продолжает нормально работать. Дело в том, что каждый модуль имеет собственный микроконтроллер, батарейку и моторы. Модули могут соединяться множеством путей для получения одного, более функционального робота или замены поврежденных компонент.
На одном из видео на сайте группы, робот теряет свой хвост, но обе части продолжают функционировать. Другой разделяется на три отдельные части, и каждая из них продолжает нормально работать. Дело в том, что каждый модуль имеет собственный микроконтроллер, батарейку и моторы. Модули могут соединяться множеством путей для получения одного, более функционального робота или замены поврежденных компонент.
В лаборатории также активно работают над другими похожими проектами, как, например, Amphibot, который изображает змею или угря, подобно Salamandra Robotica II, но без ног. Исследователи также ищут способы сделать работу-саламандре шарнирные ноги для лучшей управляемости. И если у вас есть какие-то страхи по поводу гигантских многоножек, плохие новости для вас — модификация работа может быть и ей тоже. 🙂
Конечно, все эти роботы разрабатываются сейчас, прежде всего, для исследовательских целей. Но уже в ближайшем будущем они смогут использоваться, к примеру, в поисково-спасательных операциях. Правда не столь сложно представить, как подобный принцип смогут использовать и в военных целях. «Низкоидущие» роботы-амфибии могут быть идеальными для того чтобы оставаться незамеченными, к примеру, в разведывательных операциях.
Правда не столь сложно представить, как подобный принцип смогут использовать и в военных целях. «Низкоидущие» роботы-амфибии могут быть идеальными для того чтобы оставаться незамеченными, к примеру, в разведывательных операциях.
Вывод простой — если животные делают что-то классное, кто-нибудь рано или поздно воплотит это и в роботах.
робот-саламандра, весьма точно копирующий своего живого прототипа
Достаточно просто сделать робота, который похож на какое-нибудь животное, но для того, чтобы заставить этого робота вести себя и действовать подобно этому животному, придется приложить немало усилий. Наглядной демонстрацией этому утверждению является работа исследователей-робототехников из Швейцарского федерального политехнического университета Лозанны (Swiss Ecole Polytechnique Federale de Lausanne, EPFL), возглавляемых профессором Ок Ян Иджспирт (Prof. Auke Jan Ijspeert). Эта группа работала более десятилетия, используя саламандру в качестве модели, и их робот Pleurobot очень похож на свой прототип, вплоть до самых мельчайших тонкостей его поведения.
Ключом к разработке робота Pleurobot и его «живых» движений стали данные, собранные в ходе трехмерной рентгеновской съемки движения отдельных частей тела и скелета реальной саламандры при ее движении по суше и плавании. Собирая данные, ученые отслеживали движения 64 точек скелета, мышц и поверхности этого земноводного существа, записывая это все с высокой точностью. Позже эти данные были использованы в расчетах активных и пассивных суставов, необходимых конструкции робота для того, чтобы максимально точно в трех измерениях воспроизвести все движения саламандры.
Конструкция робота Pleurobot позволяет контролировать усилие вращающего момента каждого активного сустава. А управлением всем этим заведует модель нейронной сети Central Pattern Generators, структура которой повторяет нервные цепи некоторых частей спинного мозга саламандры. Такой подход позволяет роботу не только максимально правдоподобно копировать все изученные движения саламандры, но и совершать некоторые более сложные движения, состоящие из комбинаций простых движений, которые не может сделать настоящая живая саламандра.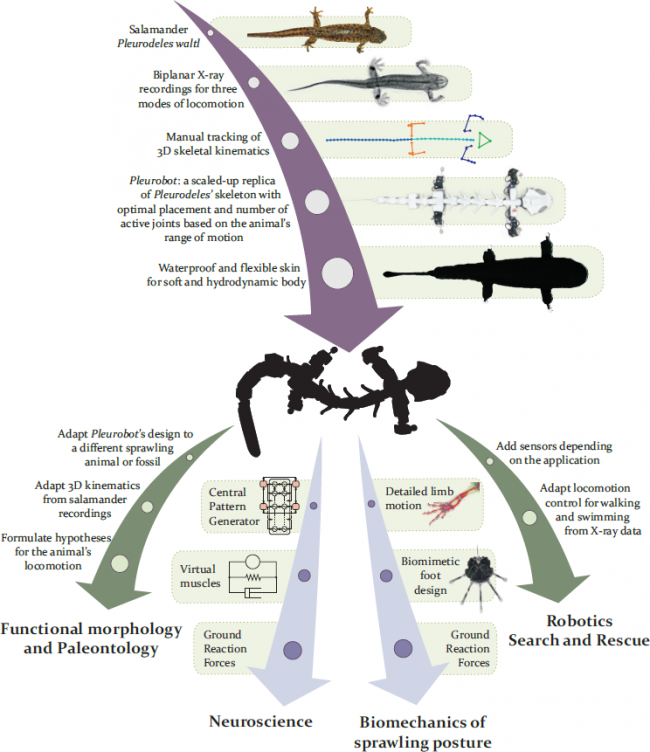
Кроме создания системы управления, исследователи добились того, что все искусственные мышцы и суставы робота реагируют на управляющие сигналы точно так же, как и элементы тела (мышцы) реальной саламандры. И все это, как можно убедиться, просмотрев приведенные видеоролики, работает достаточно хорошо.
Робот Pleurobot, определенно не является быстрым ходоком, но его очень низкий центр тяжести делает его исключительно устойчивым. Кроме этого, робот может одинаково успешно функционировать в разных средах, он может ходить по земле, плавать подводой и легко перемещаться между этими двумя средами. Такие способности делают робота Pleurobot идеальным вариантом для его использования во время поисково-спасательных операций, но для работы в водной среде на некоторые его части требуется надевать защитные водонепроницаемые чехлы.
Вдохновленные удачей исследователи из EPFL не собираются останавливаться на достигнутом: «В будущем мы планируем использовать все технологии, конструкторские решения и программные алгоритмы, использованные в конструкции робота Pleurobot для создания четвероногих роботов других типов» — пишут исследователи, — «И, вполне вероятно, что очередным нашим роботом станет робот-динозавр».
Salamandra robotica ‒ BioRob ‐ EPFL
Salamandra robotica II
Мы рады представить Salamandra robotica II, новое поколение нашего робота-амфибии, похожего на саламандру. Робот описан в статье, опубликованной в журнале IEEE Transactions in Robotics, и был приглашен на выставку робототехники Innorobo 2013, которая проходила с 19 марта года по 21 марта 2013 года в Лионе.
По сравнению со своим предшественником Salamandra robotica (см. ниже), новый робот плавает более чем в два раза быстрее, оснащен складными конечностями и оснащен более мощными микроконтроллерами, которые позволяют выполнять распределенные вычисления наших моделей нейронных сетей спинного мозга, а также моделирование свойств мышц. Это один из немногих роботов, если не единственный, который умеет плавать, ползать и ходить. Его модульная конструкция позволяет нам быстро изменять его морфологию (например, делать его длиннее, добавлять или удалять ноги и т. д.). Также его модульность означает, что каждый модуль имеет свой собственный микроконтроллер, аккумулятор и двигатели, и поэтому мы можем разделить робота на разные части, и он все равно будет работать. Это может иметь интересные последствия с точки зрения устойчивости к повреждениям. Например, робот может потерять части своего тела и при этом оставаться в состоянии ходить. Смотрите фильм ниже.
Это один из немногих роботов, если не единственный, который умеет плавать, ползать и ходить. Его модульная конструкция позволяет нам быстро изменять его морфологию (например, делать его длиннее, добавлять или удалять ноги и т. д.). Также его модульность означает, что каждый модуль имеет свой собственный микроконтроллер, аккумулятор и двигатели, и поэтому мы можем разделить робота на разные части, и он все равно будет работать. Это может иметь интересные последствия с точки зрения устойчивости к повреждениям. Например, робот может потерять части своего тела и при этом оставаться в состоянии ходить. Смотрите фильм ниже.
Основное назначение этого робота — служить научным инструментом для проверки гипотез о нейронных цепях, лежащих в основе передвижения в спинном мозге позвоночных животных. Для этого мы работаем с нейробиологами, в частности с профессором Жаном-Мари Кабельгеном из Университета Бордо, и создаем модели центральных генераторов паттернов, которые, как известно, контролируют передвижение у позвоночных животных. Эти сложные схемы могут воспроизводить сложные локомоторные паттерны, получая при этом только простые командные сигналы из верхних отделов мозга. Подробнее об этом читайте ниже (например, в статье, опубликованной в Science в 2007 году).
Эти сложные схемы могут воспроизводить сложные локомоторные паттерны, получая при этом только простые командные сигналы из верхних отделов мозга. Подробнее об этом читайте ниже (например, в статье, опубликованной в Science в 2007 году).
Вторая цель робота — проложить путь для амфибийных сервисных роботов, которые можно было бы использовать для инспекционных задач или для поисково-спасательных операций (например, после землетрясения, наводнения или оползня).
Научная публикация:
Crespi, A.; Каракасилиотис, К.; Гиньяр, А .; Эйспеерт, А. Дж., «Саламандра Роботика II: робот-амфибия для изучения плавательных и походных походок, подобных саламандрам», IEEE Transactions on Robotics , vol. 29, №2, с. 308-320, doi: 10.1109/ТРО.2012.2234311. Доступно в Интернете по адресу: https://dx.doi.org/10.1109/TRO.2012.2234311
Salamandra robotica II на Innorobo 2013 (низкое разрешение):
Фотографии нового робота :
Кредиты: Костас Каракасилиотис, Лаборатория биороботов, EPFL.
Фотографии нового робота (высокое разрешение):
SRII_lake_front.JPG
SRII_lake_side.JPG
SRII_lake_top.JPG
Видеоролики нового робота: (HD-версии доступны по запросу)
Salamandra robotica II плавание и ходьба в Инноробо
Salamandra robotica II на открытом воздухе
Salamandra robotica II с распределенным контроллером
Salamandra robotica II ходьба
Salamandra robotica II в Innorobo
Вы можете использовать их без предварительного разрешения. зачислено следующим образом: Костас Каракасилиотис, Лаборатория биоробототехники, EPFL.
От плавания к ходьбе с роботом-саламандрой, управляемым моделью спинного мозга (Science 2007)
На этой странице описывается модель двигательной схемы саламандры и ее реализация в нашем роботе, похожем на саламандру: Salamandra robotica . Эта работа появилась в выпуске журнала Science от 9 марта 2007 года. Он расширяет предыдущую работу, которую мы проделали по передвижению саламандры с использованием нейромеханического моделирования.
Используя саламандру в качестве животной модели, мы рассматриваем три фундаментальные проблемы, связанные с передвижением позвоночных: (i) модификации, претерпеваемые спинномозговыми локомоторными цепями во время эволюционного перехода от водной к наземной локомоции, (ii) механизмы, необходимые для координации конечностей и осевых движений, и (iii) механизмы, которые лежат в основе переходов походки, вызванных простой электрической стимуляцией ствола мозга. Мы решаем эти вопросы с помощью численной модели спинного мозга саламандры, которую мы внедряем и тестируем на новом роботе, похожем на саламандру, способном плавать и ходить. Следовательно, это исследование также является демонстрацией того, как роботы могут использоваться для тестирования биологических моделей, и, в свою очередь, как биология может помочь в разработке контроллеров движения роботов.
Модель имитирует центральный генератор паттернов (CPG, т. е. цепь, способная генерировать скоординированные паттерны ритмической нейронной активности), лежащий в основе движения в спинном мозге. Он реализован в виде системы связанных нелинейных генераторов и работает на микроконтроллере на борту робота-амфибии. Насколько нам известно, это первый робот, который сочетает в себе три режима передвижения — плавание, змеиное ползание и ходьбу — в одном роботе. Простые управляющие сигналы передаются по беспроводной сети с ноутбука на робота для модуляции движения, аналогично тому, как верхние центры головного мозга посылают простые сигналы в спинной мозг для инициирования и модуляции движения. Задача робота состоит из трех частей: (i) показать, что наша модель CPG может генерировать движение вперед с переменной скоростью и направлением (т. е. аспекты, которые требуют «тела» для проверки и не могут быть изучены только на нейронном уровне). , (ii) качественно сравнить походки, сгенерированные с походками настоящей саламандры, и (iii) показать, что концепция CPG может привести к надежному управлению движением для роботов с несколькими шарнирными соединениями.
Он реализован в виде системы связанных нелинейных генераторов и работает на микроконтроллере на борту робота-амфибии. Насколько нам известно, это первый робот, который сочетает в себе три режима передвижения — плавание, змеиное ползание и ходьбу — в одном роботе. Простые управляющие сигналы передаются по беспроводной сети с ноутбука на робота для модуляции движения, аналогично тому, как верхние центры головного мозга посылают простые сигналы в спинной мозг для инициирования и модуляции движения. Задача робота состоит из трех частей: (i) показать, что наша модель CPG может генерировать движение вперед с переменной скоростью и направлением (т. е. аспекты, которые требуют «тела» для проверки и не могут быть изучены только на нейронном уровне). , (ii) качественно сравнить походки, сгенерированные с походками настоящей саламандры, и (iii) показать, что концепция CPG может привести к надежному управлению движением для роботов с несколькими шарнирными соединениями.
Наша работа показывает, что спинной мозг содержит довольно сложные нервные цепи, которые могут управлять сложной локомоцией, получая только командные сигналы высокого уровня. В частности, мы демонстрируем, как примитивная нейронная цепь для плавания, подобная обнаруженной у миноги, может быть расширена филогенетически более поздними колебательными центрами конечностей, чтобы объяснить способность саламандр переключаться между плаванием и ходьбой. Наша работа также предлагает механизм, который объясняет, как переход от плавания к ходьбе может быть достигнут простым изменением уровня стимуляции ствола мозга. Механизм основан на двух гипотезах: (1) что колебательные центры конечностей медленнее, чем колебательные центры тела, и (2) что колебательные центры конечностей насыщаются (т.е. перестают колебаться) при получении высокого уровня драйва. Первая гипотеза была подтверждена новыми биологическими экспериментами (см. Sup. Mat. на сайте Science). Этот тип автоматического перехода к походке, вызванный простой электрической стимуляцией, наблюдался у многих позвоночных, но еще плохо изучен. Кроме того, наша модель объясняет, как поддерживается координация между телом и конечностями во время передвижения.
В частности, мы демонстрируем, как примитивная нейронная цепь для плавания, подобная обнаруженной у миноги, может быть расширена филогенетически более поздними колебательными центрами конечностей, чтобы объяснить способность саламандр переключаться между плаванием и ходьбой. Наша работа также предлагает механизм, который объясняет, как переход от плавания к ходьбе может быть достигнут простым изменением уровня стимуляции ствола мозга. Механизм основан на двух гипотезах: (1) что колебательные центры конечностей медленнее, чем колебательные центры тела, и (2) что колебательные центры конечностей насыщаются (т.е. перестают колебаться) при получении высокого уровня драйва. Первая гипотеза была подтверждена новыми биологическими экспериментами (см. Sup. Mat. на сайте Science). Этот тип автоматического перехода к походке, вызванный простой электрической стимуляцией, наблюдался у многих позвоночных, но еще плохо изучен. Кроме того, наша модель объясняет, как поддерживается координация между телом и конечностями во время передвижения. Наконец, модель также дает потенциальное объяснение того, как саламандры контролируют скорость и направление движения, соответственно модулируя уровень и асимметрию возбуждения, воздействующего на спинной мозг.
Наконец, модель также дает потенциальное объяснение того, как саламандры контролируют скорость и направление движения, соответственно модулируя уровень и асимметрию возбуждения, воздействующего на спинной мозг.
Участвующие лица: Ауке Ийспеерт, Алессандро Креспи, Костас Каракасилиотис, Джереми Кнузель, Андре Гиньяр, Андре Бадершер, Жан-Мари Кабельген (Университет Бордо), Дмитрий Рыцко (Университет Бордо 2).
Использование изображений и видео
Изображения и видео на этой веб-странице могут быть использованы без предварительного разрешения при условии, что они указаны следующим образом:
Технические рисунки: «Рисунок А. Эйспеерта, любезно предоставлено Лабораторией биороботов, EPFL»
Изображения: « Фотография XXX , любезно предоставлено лабораторией Biorobotics, EPFL», где XXX — это A. Herzog, если a_herzog находится в имени файла, A. Badertscher, если a_badertscher находится в имени файла, и A. Crespi в противном случае. .
.
Видео: «Видео от YYY, предоставлено Лабораторией биоробототехники, EPFL». Точно так же YYY является E. Bastian, если e_bastian находится в имени файла, и A. Crespi в противном случае. Пожалуйста, свяжитесь с нами по электронной почте auke.ijspeert на epfl.ch или alessandro.crespi на epfl.ch, если вам нужна дополнительная информация или видео с более высоким разрешением.
Образцы анимации/фильмов
Для файлов AVI требуется кодек Xvid (см. http://www.xvid.org), если ваш проигрыватель не поддерживает его напрямую (большинство современных проигрывателей должны).
Робот-саламандра выходит из Женевского озера: (MPG, 3.0MB) (AVI xvid, 5.3MB)
Робот-саламандра плавает в Женевском озере: (MPG, 4.1MB) (AVI xvid, 3.7MB)
От плавания к ходьбе , вид сзади: (MPG, 4,9 МБ) (AVI xvid, 4,2 МБ)
От плавания к прогулке, вид сбоку: (MPG, 1,5 МБ) (AVI xvid, 1,4 МБ)
От плавания к ходьбе, вид под водой: (MPG, 1,6 МБ) (AVI xvid, 2,6 МБ)
Плавание, вид под водой: (MPG, 1,6 МБ) (AVI xvid, 4,0 МБ)
Робот Саламандра, идущий по бетону: (MPG , 10,0 МБ) (AVI xvid, 9,1 МБ)
Робот Саламандра, идущий с переменной скоростью: (MPG, 9,5 МБ) (AVI xvid, 8,7 МБ)
Робот Саламандра, идущий к камере: (MPG, 6,2 МБ) (AVI xvid, 5.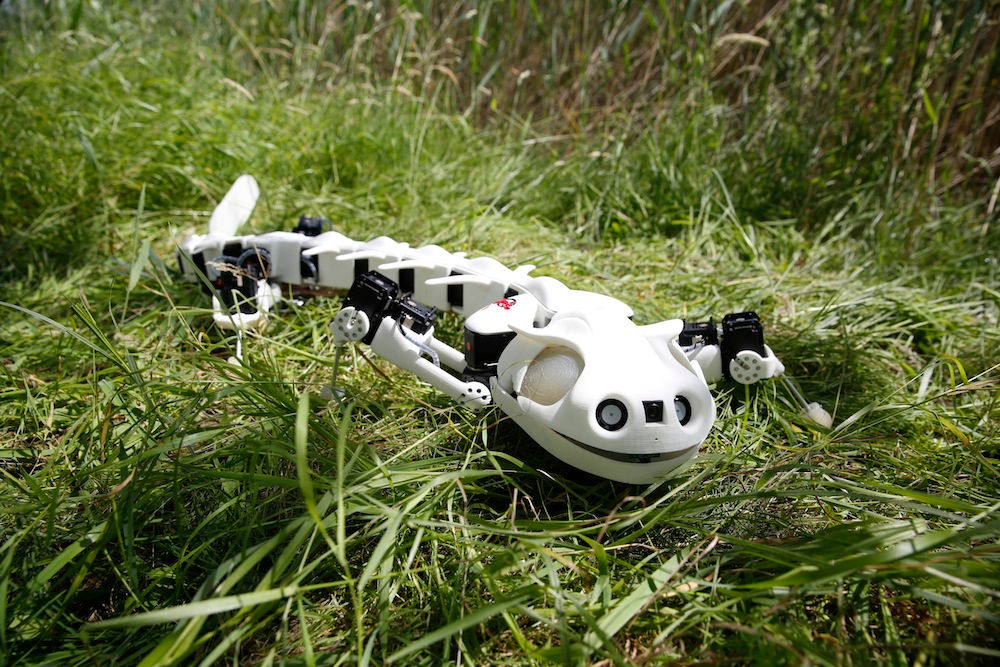 6MB)
6MB)
Хорошая координация тела и конечностей приводит к более быстрой ходьбе: (MPG, 5.2MB) (AVI xvid, 4.8MB)
Контроль направления во время ходьбы: (MPG, 10.8MB) (AVI xvid, 8.9МБ)
Змеиное ползание (плавает по земле, как саламандра, пытающаяся убежать по траве): (MPG, 6.4MB) (AVI xvid, 3.0MB)
Передвижение настоящей саламандры, фильм S1 из Sup. Мат.: (Quicktime, 4.3MB)
Передвижение робота-саламандры, приводимого в движение моделью спинного мозга, фильм S2 Sup. Мат.: (Quicktime, 37.1MB)
Робот-амфибия/змея-минога AmphibotII (статья будет представлена на ICRA2007): (MPG, 4.6MB)
Изображения с низким разрешением (нажмите на миниатюру)
Изображения высокого разрешения (от 4,0 до 15,0 МБ, в том же порядке, что и выше)
a_herzog_lake8.jpg, a_herzog_lake1.jpg, a_herzog_lake2.jpg, a_herzog_lake3.jpg , a_herzog_lake4.jpg, a_herzog_lake5.jpg, a_herzog_lake6.jpg, a_herzog_lake7.jpg, a_herzog_lake9.jpg, a_herzog_outside1. jpg, a_herzog_outside2.jpg, a_herzog_outside3.jpg, a_herzog_lab1.jpg, a_herzog_090.jpg, a_herzog_lab1.jpg, a_herzog_090.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg Эйспеерт, А. Креспи, Д. Рыцко и Дж. М. Кабельген. От плавания до ходьбы с роботом-саламандрой, управляемым моделью спинного мозга. Наука , 9 марта 2007 г., Том. 315. нет. 5817, стр. 1416–1420, 2007. Полный текст и вспомогательные онлайн-материалы, фильм S1 (Quicktime, 4,3 МБ), фильм S2 (Quicktime, 37,1 МБ)
jpg, a_herzog_outside2.jpg, a_herzog_outside3.jpg, a_herzog_lab1.jpg, a_herzog_090.jpg, a_herzog_lab1.jpg, a_herzog_090.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg, a_herzog_lab2.jpg Эйспеерт, А. Креспи, Д. Рыцко и Дж. М. Кабельген. От плавания до ходьбы с роботом-саламандрой, управляемым моделью спинного мозга. Наука , 9 марта 2007 г., Том. 315. нет. 5817, стр. 1416–1420, 2007. Полный текст и вспомогательные онлайн-материалы, фильм S1 (Quicktime, 4,3 МБ), фильм S2 (Quicktime, 37,1 МБ)
А.Дж. Эйспеерт, А. Креспи и Дж. М. Кабельген. Моделирование и робототехника исследования движения саламандры. Применение нейробиологических принципов для управления движением роботов. Нейроинформатика , 3(3):171-196, 2005.
[ наг. | .pdf ]
А.Дж. Эйспеерт. Коннекционистский центральный генератор паттернов для водных и наземных походок моделируемой саламандры. Биологическая кибернетика , 84(5):331-348, 2001.
[ наг | .ps. gz | .pdf ]
gz | .pdf ]
Робот Саламандра ходит как настоящий
Группа швейцарских исследователей создала робота, вдохновленного саламандрой, который по форме похож на настоящего и ходит, как саламандра.
Энн Р. Трайфт | 11 июля 2016 г.
Смотреть этот веб-семинар
Швейцарские исследователи создали робота, вдохновленного саламандрой, который по форме похож на настоящего и ходит, как саламандра. После нескольких лет создания роботов-саламандр, как мы сообщали, ученые впервые использовали модель, основанную на точном трехмерном движении скелета животного. В результате появился робот, который точно имитирует плавание, ходьбу и ползание настоящей саламандры.
Робот-саламандра, получивший название Pleurobot, разработанный Федеральной политехнической школой Лозанны (EPFL), помогает ученым лучше понять, как передвижение позвоночных эволюционировало от плавания к ходьбе, особенно работу спинного мозга и то, как он взаимодействует с движениями животных.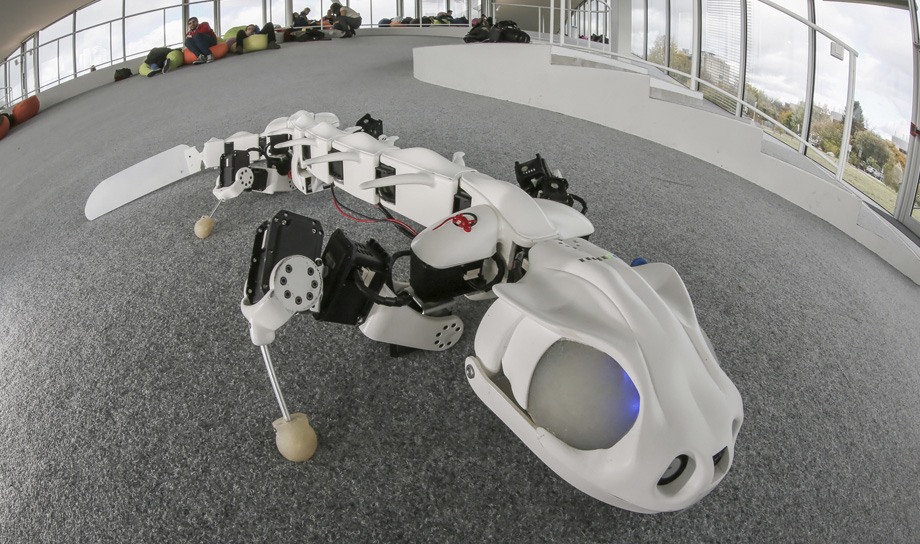 тело. Ожидается, что это исследование в лаборатории биоробототехники EPFL поможет в разработке более совершенных нейропротезных устройств и других методов лечения пациентов с ампутированными конечностями и параличом нижних конечностей.
тело. Ожидается, что это исследование в лаборатории биоробототехники EPFL поможет в разработке более совершенных нейропротезных устройств и других методов лечения пациентов с ампутированными конечностями и параличом нижних конечностей.
Pleurobot — это робот, вдохновленный саламандрой, который выглядит как настоящий и ходит, как саламандра. Ожидается, что понимание того, как спинной мозг работает во время передвижения и взаимодействует с телом животного, поможет разработать более совершенные нейропротезные устройства и другие методы лечения пациентов с ампутированными конечностями и параличом нижних конечностей.
(Источник: Федеральная политехническая школа Лозанны)
У настоящей саламандры 40 позвонков и множество суставов. Некоторые из этих суставов могут двигаться больше, чем суставы человека, например, из стороны в сторону или вверх и вниз, а также свободно вращаться. Напротив, у Pleurobot меньше костей и суставов: всего 11 сегментов вдоль его позвоночника плюс 27 высококлассных серводвигателей. Исследователи упростили структуру костей, уменьшив количество моторизованных сегментов до необходимого минимума и определив их оптимальное расположение, чтобы правильно воспроизвести походку животного в трех измерениях.
Исследователи упростили структуру костей, уменьшив количество моторизованных сегментов до необходимого минимума и определив их оптимальное расположение, чтобы правильно воспроизвести походку животного в трех измерениях.
Чтобы получить точную 3D-модель того, как животные двигаются, команда записала рентгеновские снимки саламандр, называемые синерадиографией. Эти записи были сделаны как сверху, так и сбоку. Они отследили до 64 различных точек вдоль скелета каждой саламандры, когда она шла, ползала и плавала, чтобы увидеть, как кости двигаются в трех измерениях. Как вы можете видеть в этом видео, которое включает в себя рентгеновские видеофрагменты, на которых робот и настоящая саламандра бок о бок проходят их шаги, походки робота и животного очень похожи.
(Источник: Федеральная политехническая школа Лозанны)
Команда Лаборатории биороботов, возглавляемая Ауке Эйспеертом, также использовала другие технологии для создания Плевробота, включая программное обеспечение для оптимизации и 3D-печать для изготовления его костей.