Ионный двигатель космического корабля, отправившегося на ЦЕРЕС
по Начо Морато
Дирижабль Dawn, который недавно прибыл на Цереру и вращается вокруг нее, сделал это с помощью нового двигателя.
Есть ионный двигатель на них будут устанавливаться самолеты следующего поколения. Электрическая энергия используется для создания заряженных частиц из топлива, обычно газа ксенона, и ускорения их до чрезвычайно высоких скоростей. Улетная скорость обычных ракет ограничена химической энергией, хранящейся в молекулярных связях топлива, что ограничивает тягу примерно до 5 км / с. Однако ионные двигатели ограничивается только доступной на судне электрической мощностью космос, получая скорости убегания, которые движутся в диапазоне от 15 км / с до 35 км / с.
Что такое ионный двигатель?
Ионный двигатель или подруливающее устройство использует ионный пучок для движения.. Способы ускорения ионов различаются. Принцип ионного двигателя основан на концепциях, разработанных физиком Германом Обертом и его опубликованной в 1929 году работе Die Rakete zu den Planetenräumen. Первый тип ионного двигателя, известный как Ионное топливо типа Кауфмана, был разработан в 1960-х Гарольдом Р. Кауфманом, сотрудником НАСА, на основе Duoplasmatron.
Лас- самолет с электроприводом они намного более эффективны, чем те же химические двигатели. Сохраняется большая масса и требуется меньше топлива для кораблей, что подразумевает очень значительное снижение затрат.
Подпишитесь на наш Youtube-канал
Для примера: вывести на орбиту килограмм массы стоит около 20.000 долларов.
В зависимости от метода, используемого для ускорения топлива, существует три типа электрической тяги.
Электротермические двигатели
Электротермические двигатели использовать электрическую энергию для нагрева топлива либо пропуская ток через нагревательный элемент (Resistojets), либо пропуская ток через горячий ионизированный газ или саму плазму (Arcjet)
Электромагнитные двигатели
Электромагнитные двигатели ионизировать топливо, превращая его в электропроводящую плазму который ускоряется за счет взаимодействия сильного электрического тока и магнитного поля. Этот метод, известный как плазменное топливо, очень похож на принцип работы электродвигателя.
Электростатические двигатели
электростатические двигатели использовать электрическое поле, создаваемое приложением высокого напряжения к двум перфорированным сеткам с множеством маленьких отверстий, для ускорения пороха. Это называется сеточно-ионным двигателем, и именно он движет Dawn. Другой электростатической конструкцией является двигатель малой тяги на эффекте Холла, который работает аналогичным образом, но вместо высоковольтных сетей создает электрическое поле в выходной плоскости двигателя малой тяги, захватывая электроны в магнитном поле.
Оставляем видео операции
Решение, которое может быть очень выгодным для частных компаний, которые сократят значительную часть своих затрат.
(Есть решение) Почему бы не использовать высокооборотные шаговые двигатели с высоким микрошагом с редуктором в 3D-принтере?
diy-3d-printer delta microstepping
3D-принтер использует шаговые двигатели для перемещения печатающей головки и выдавливания филамента. Они должны обладать хорошим крутящим моментом и разрешающей способностью.
Микрошаг улучшает разрешение в 32 раза (я думаю), но чем выше ваш микрошаг, тем меньше крутящий момент.
Так что…
Почему бы не вращать двигатель с микроступенчатой передачей на высоких оборотах (что также уменьшает крутящий момент) и не увеличить крутящий момент за счет тяжелого редуктора с использованием червячной передачи?
Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Увеличение частоты вращения двигателя и использование редуктора должны сохранить точность и крутящий момент, позволяя использовать более слабые и легкие двигатели, что потенциально снижает детализацию движения. Я думал, что это более простой подход, и я хотел понять, что я потеряю в качестве компромисса. Я рассматривал большее трение при червячной передаче и износ, более высокий нагрев двигателя и т. Д. Но, может быть, это что-то вроде «не чини то, что не сломано». 3D-принтеры в наши дни не так уж дороги. Я просто хотел бы, чтобы они были еще дешевле.
@Mitesh Patel, 👍2
Обсуждение
3 ответа
Лучший ответ:
▲ 6
Чтобы ответить на каждый вопрос:
Микрошаг улучшает разрешение в 32 раза (я думаю), но уменьшает крутящий момент, чем выше ваш микрошаг.
Крутящий момент не уменьшается за счет микрошагов. Уменьшение крутящего момента происходит только при движении на высоких оборотах. Сопротивление фазы двигателя должно соответствовать целевому значению оборотов в минуту (или скорости шага). Кроме того, микрошаг может достигать 1/256, и я лично использовал 1/128. Некоторые скажут, что все, что делает более высокий микрошаг,-это улучшает плавность, а не точность. Я лично протестировал 1/128 микрошагов по 17-дюймовой длинной оси. Мне удалось добиться точности и повторяемости с точностью до 5 микрон.
Почему бы не вращать двигатель с микрошагом на высоких оборотах (что также снижает крутящий момент) и не увеличить крутящий момент за счет сильного редуктора с помощью червячной передачи?
Ответная реакция! Весь смысл шаговых двигателей в том, что они обеспечивают движение без люфта. Установка передачи между электромагнитным и концевым эффектором создаст люфт, который необходимо компенсировать во время движения. Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
Не будет ли движение печатающей головки еще более плавным, а небольшие ошибки в микрошагах и неравномерности передач не будут усреднены с использованием подхода с высокими оборотами и редуктором?
Он уже достаточно плавный с 1/64 — м или большим микрошагом. Экструзионное сопло опускается только до 2 мм.
Действительно ли микрошаг действительно обеспечивает точное разделение шагов?
Да. Да, это так.
Можем ли мы обойтись более слабыми двигателями, потому что крутящий момент будет увеличен за счет уменьшения передачи?
Нет, потому что это просто остановится.
Можем ли мы обойтись 48 шаговыми шаговыми двигателями вместо 200, потому что уменьшение передачи обеспечивает повышенное разрешение?
Помимо того факта, что никто не делает 48 шагов за оборот двигателей, использование редуктора было бы нелогичным. В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Крутящий момент! Если бы они использовали небольшой двигатель для привода экструдера, им пришлось бы компенсировать потерю крутящего момента более высокой мощностью (т. е. напряжением). Это приведет к проблемам с охлаждением этого двигателя.
Суть в том, что если вы правильно определяете размеры двигателей и проектируете систему, то трансмиссия не нужна. Если вам нужен больший крутящий момент, приобретайте двигатели большего размера. Если портал должен быть легким, используйте механизм delta или corexy.
, @user77232
▲ 2
Есть старое правило, которое гласит: «Если вопрос начинается с» Почему они этого не делают», ответ, скорее всего, будет «деньги»».
В данном случае речь идет о стоимости червячных передач. Правильно сопрягаемые червячные передачи намного дороже в изготовлении, чем обычные цилиндрические шестерни. Это, вероятно, объясняет большую часть этого-не говоря уже о том, что 200 шаговых двигателей, которые мы видим на большинстве принтеров FDM, являются очень распространенным товаром, и чем больше вы что-то делаете, тем меньше стоит каждый из них.
Кроме того, вы не можете управлять большинством червячных передач с обратной передачей (особенно с высоким передаточным числом). Это не повлияло бы на экструдер (или не повлияло бы? Я видел много чего за ручки ходить на экструдере вала двигателя), но если я не могу вернуться-вожу X или Y оси, я был бы очень раздражен (использования ручного управления движением в прошивку все, как стол откатка) . .. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
Итак, итог: то, что у нас есть сейчас, работает достаточно хорошо, и сделать его (может быть, совсем немного) лучше будет стоить дороже, чем то, что мы получим. ИМО.
, @Zeiss Ikon
▲ 2
Существуют экструдеры, которые используют гибкий вал для поворота червячной передачи в прямом экструдере, в то время как двигатель установлен на раме, которая поворачивает гибкий вал (на ум приходит пикантный шустрый). Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Flex3Drive, из которого якобы был клонирован Zesty, допускает использование очень маленького двигателя NEMA-8, непосредственно соединенного с червячной передачей вместо гибкого вала. Это по-прежнему добавляет значительное (с точки зрения машин, стремящихся к ускорению 40 м/с2 и тому подобное) количество массы к инструментальной головке, и мне неясно, какая скорость/ускорение по оси E достижима при уменьшении 40:1 и таком маломощном двигателе.
А большего степперы обычно используется в 3D-принтеры вполне способны правдоподобное е-осевой скоростью или ускорением, что вам хотелось бы без передачи или с незначительными потерями (например, 2:1 или 3:1), Как только вы встаете с червячной передачей уровень отношений, это вопрос свойств конкретного мотора, можно ли получить достаточную скорость для приемлемого втягивание производительности или даже нормально печатать движения на очень высоких скоростях. Например, у меня есть Flex3Drive G5, и оригинальный электронный шаговый двигатель NEMA-17 от моего Ender 3 плохо работает с ним без дополнительной передачи со стороны двигателя вала. Однако «шаговый двигатель с высокой частотой вращения», как вы предлагаете, должен прекрасно справляться с червячным редуктором.
Итак, есть ли какая-то причина для этого? Если вы передаете силу таким образом, что не можете справиться с высоким крутящим моментом, например, с гибким валом, да. В противном случае-нет. Как уже говорили другие, современные микрошаги до смешного точны.
, @R.. GitHub STOP HELPING ICE
Испанский инженер изготовил «самый маленький в мире» двигатель V-12
Выдающиеся люди
Посмотреть 17 изображений
Посмотреть галерею — 17 изображений
Любой, кто ценит искусство точного проектирования двигателей, должен получить удовольствие от этого предложения от испанского инженера по имени Патело. Начав с кусков алюминия, бронзы и нержавеющей стали, он потратил более 1200 часов на проектирование, фрезерование, токарную обработку и сверление того, что, как он утверждает, является «вероятно» самым маленьким двигателем V12 в мире. Приводимое в действие впрыском сжатого воздуха (0,1 кг/кв. см), это маленькое чудо может похвастаться общим рабочим объемом 12 кубических сантиметров благодаря двенадцати поршням диаметром 11,3 мм и работает как шарм. Лучше всего то, что вы можете увидеть, как это происходит, в подробном видео, которое следует ниже.
Построенный в первую очередь для образовательных целей, Патело не планирует продавать мини-моторы. Фактически, чтобы доказать, что это длительное упражнение в металлической точности было действительно делом любви, он посвятил двигатель своим четырем внукам. Все 261 часть двигателя он изготовил с нуля, но черту подвел с помощью 222 винтов, которые купил, предположительно для того, чтобы у него было хотя бы немного времени, чтобы провести его с внуками.
Вот английский перевод терминов в видео на случай, если у вас нет под рукой испанского словаря (просмотр займет девять минут и смена потрачена не зря):
Construimos el ciguenal: Сборка коленчатого вала
Способ монтажа: Начало установки
Монтажный блок в блоке: Установите коленчатый вал в блок
Левый вал: распределительный вал
Соединительный элемент левого рычага: Опорный подшипник распределительного вала
Распределительный узел: ГРМ
Volante: Маховик
Цилиндры: Цилиндры
Поршни: Поршни
Comprobamos con un taladro que todo esta en orden: Проверьте сверлом, все ли в порядке
Коллекторы впуска: Впускные коллекторы
Коллекторы выхода: Выпускные коллекторы
Ответвления: Распределительная крышка
Бомбы охлаждения: Насосы охлаждения
Enfriador de agua dulce: Охладитель свежей воды
Фильтр на входе: Фильтр на входе
Pruebas de funcionamiento: Функциональные тесты
Camara lenta: Медленное движение
Количество отверстий/винтов: Количество штук 9014/винтов trabajo: Часы работы
Может быть, это музыка в видео, но прецизионная обработка не может быть более захватывающей, чем эта.
El motor V-12 más pequeño del mundo. (Самый маленький двигатель V-12 в мире)
Посмотреть галерею — 17 изображений
19 комментариев
Загрузить еще
Самый маленький в мире действующий двигатель W-32
Назад на главную страницу блога
Мэтью Блокус на
20 фев 2015
Посетите любой автомобильный гараж в мире и спросите тамошних механиков, любят ли они собирать двигатели с нуля.
Вы, вероятно, не найдете много кандидатов, которые делают. Часто длительный и трудоемкий процесс представляет собой очень трудоемкую работу, требующую управления тысячами отдельных деталей, проверки их соответствия друг другу в правильном порядке и соблюдения необходимых спецификаций для обеспечения работы двигателя.
Возьмите эту сложность, увеличьте ее на несколько ступеней, и вы получите задание, которое взял на себя — Хосе Мануэль Эрмо Баррейро, известный любителям моделирования и увлеченным зубчатым колесам как — Patelo , когда он с нуля создал полностью рабочий миниатюрный двигатель W-32.
По данным 2015 г. Автомобиль и водитель Артикул Патело создал 850 деталей вручную и собрал их с помощью 632 отдельных винтов. Сам проект занял 2520 часов или 105 дней подряд.
Чтобы представить это в перспективе, двигатель W-16 внутри суперкара Bugatti Veyron считается упрощенным по сравнению с W-32, а тем более миниатюрным, который может поместиться в руках.
Посмотрите фотографии мини W-32 Patelo ниже, а в самом низу посмотрите короткое видео с подробным описанием сборки.
Двигатель Патело W-32, разобранный по частям. Изображение: blog.caranddriver.com
Средняя сборка миниатюрного W-32. Изображение: blog.caranddriver.com
Миниатюрный W-32 Патело, работающий так плавно, что на нем можно балансировать монеты. Изображение: blog.caranddriver.com
#автомобили
#Автомобиль и водитель
#двигатель
#мини
#миниатюра
#Патело
#W-32
#W32
Вас также может заинтересовать:
Информационный бюллетень | Октябрь 2022 by Petroleum Service Company 21 октября 2022 г.
Программа для расчета желаемой центровки авиамодели V 2.0 (13)
Расчет центра тяжести авиамодели (14)
USB адаптер сигнала PPМ на основе платы Arduino Pro Micro (14)
Вот видео изготовления самодельного двигателя на сжатом воздухе.
В СССР были движки на CO2 — заряжаешь ресивер на авиамодели от баллончика и в полет! Этому двигателю нужна авиамодель с бутылочным рессивером.
В 2005-2006 я покупал сыну авиамодель с крылом из пенопласта похожего на потолочку. Там как раз стоял движок с питанием от пластиковой бутылки. Сам движок был интегрирован с пробкой, авиамодель была очень легкой. Одной закачки хватало что бы поднять модель самолета на метров 20-30, она была не радиоуправляемая и норовила улететь по ветру. 🙂
Tom Stanton, автор видео, не только сделал движок, но и авиамодель для него.
К сожалению его вариант вышел веьма тяжелым и авиамодели не хватило тяги движка для того, что бы нормально полететь. Видать разучились авиамоделисты строить легкие авиамодельки!
Тут стоило применить технологии которые использовались для изготовления резиномоторных моделей самолетов, только использовать современный материал.
Надеюсь Том сделает более легкую радиоуправляемую авиамодель и этот двигатель на сжатом воздухе сможет загнать модель самолета под облака!
Константин, Радиоуправляемые Авиамодели
Последние сообщения форума
Последние созданные темы
1) turnigy 9XR в скором будующем 2) Моторная Алула 3) Марьинский парк 4) Помогите новичку! 5) Продам Saito FG 61 TS новый. 6) продаю Лк Чайзер 7) Товары для авиамоделизма 8) Сборка небольшого RC самолёта с gps для новичка 9) Подойдёт ли мой выбор для первых полётов? 10) Снова Не очень большая модель для души BF-109-G2 Master series
1) Помогите новичку! 2) Продам Saito FG 61 TS новый. 3) продаю Лк Чайзер 4) Сборка небольшого RC самолёта с gps для новичка — Сборка rc самолёта 5) Помощь новичку с подбором комплектующих — Разобраться с совместимостью, подбор контроллера полета и передатчика. 6) Нужна помощь. Сгорела Jumper t16 pro v.2 — Определить деталь 7) Снова Не очень большая модель для души BF-109-G2 Master series 8) Симуляция полета дрона без контроллера в наличии 9) Продаю Hobbywing XRotor Micro 40A (20×20) 6S 4 в 1 ESC Blheli 32 — Регулятор 4 в 1 40А Blheli 32 Dshot 1200 / 150/300/600 10) 2 GPS модуля
Похожие статьи
Модели для аэродромов — типы двигателей для моделей самолетов
./../images/themes/09.jpg»>
Нам доступны различные типы двигателей, и каждые несколько лет тип, которого у нас никогда не было, становится доступным. Я не могу предсказать, что будет следующий, но уже есть много типов двигателей на выбор.
На самом деле, я предсказываю, что электроэнергия станет более популярной, чем внутреннего сгорания. Технология усовершенствована до иметь легкие батареи, которые обеспечивают сильную мощность для разумного полета раз. Электрические самолеты имеют мощность, сравнимую со свечением, чтобы включить сверхскоростные самолеты.
В ближайшие годы цена на то, что сейчас считается элитным оборудование должно опускаться туда, где оно более доступно. Чем тише силовые установки, сравнимые характеристики и полное отсутствие выхлопной каши планер должен сделать электромобили более привлекательными. На самом деле в некоторых мест, электроэнергия может быть обязательной, чтобы сохранить летные поля.
Если вы новичок и планируете летать на бензиновом тренер, то мой рекомендацией является двухтактный двигатель накаливания для вашего первого самолета, потому что почти любой в вашем местном клубе сможет помочь вам с этим. Тем не менее, вы можете захотеть сразу перейти на электроэнергию. Таким образом, вы не будет потрачено денег на вспомогательное оборудование для свечения, а затем придется идти вернуться и приобрести оборудование для электрики.
Двухтактное свечение
Двухтактные двигатели
, безусловно, самые популярный тип авиационного двигателя модели. Они простые, недорогой, мощный и надежный. Эти двигатели способны развивают очень высокие обороты и являются предпочтительным двигателем для гребного винта. управляемый скоростной самолет. Самолет с канальным вентилятором зависит от высокого вентилятора RPM для создания их тяги, и только два цикла могут производить их виды оборотов.
См. также
Расчет скорости и эффективности воздушного винта
Четырехтактное свечение
4-тактные двигатели запущены стали популярными в 1980-х годах и прочно закрепились в RC-сообщество. Первоначально они были заявлены как реалистичные. (чего у них нет). Они не звучат как полноценные самолеты. двигателей, но их гораздо приятнее слушать.
Четырехтактные имеют больше крутящего момента, чем у двухтактных двигателей, при более низких оборотах. Это означает они лучше подходят для самолетов, требующих сильных вертикальных наборов высоты и т. д. постоянные скорости полета. Четырехтактные двигатели так же надежны, как и двухтактные. двигатели, но более сложные с большим количеством движущихся частей.
Наконец, четырехтактные двигатели более экономичны, чем двухтактные. А 4-тактный двигатель данного размера будет работать намного дольше на топливном баке, чем такой же размер 2-тактный.
Во многих наших приложениях используется двухтактный цикл, в то время как четырехтактный был бы лучший выбор. На самом деле, я считаю, что за исключением моделей которым нужны высокие обороты и тренажеры, четырехтактный всегда лучший выбор. Тем не менее, четырехтактный двигатель сопоставимого размера более дорогой.
Двухтактный газ
Когда большие самолеты впервые начали появляться на летных полях, они были оснащены переделанными цепными пилами и двигателями травоядных машин. Теперь существует несколько производители, создающие газовые двигатели специально для радиоуправляемых самолетов. Топливо для этих двигателей намного дешевле, чем топливо накаливания, которое (теоретически) помогает компенсировать затраты на полеты более крупных моделей.
Лично я считаю, что бензиновые двигатели самые реалистичные звуковые двигатели, кроме турбин. У них такое глубокое гортанное рычание это напоминает мне старые Stearmans.
Хотя любой двигатель может причинить серьезные телесные повреждения, эти двигатели, в частности, могут оторвать конечности, и с ними следует обращаться крайне осторожно. осторожность.
Дизель
Вы можете всю жизнь летать на авиамоделях и ни разу не увидеть ни одного самолета. с дизелем на вашем поле. По какой-то причине их просто нет популярный. У меня нет практического опыта с этими двигателями, но они звучат как они имеют много преимуществ перед другими типами.
Например, они способны раскачивать более крупные пропеллеры. большое преимущество для масштабных моделей ранних типов, таких как самолеты времен Первой мировой войны. Кроме того, они не требуют использования драйвера накала и батареи.
Я бы очень хотел использовать дизель на небольшой конверсии резины в радиоуправляемую. Тем не менее, единственные доступные варианты намного дороже, чем сопоставимые двухтактный, и обычно рядом нет никого, кто мог бы помочь те из нас, у кого нет опыта работы с этими двигателями. Тем не менее, я собирается иметь один в какой-то момент в не слишком отдаленном будущем. я позволю вы знаете, чему я учусь.
Ванкель
Насколько мне известно, для авиамоделей производится только один двигатель Ванкеля. Это .30 Wankel производства O.S. Двигатели. у меня такой и был доволен своими характеристиками во всех областях, кроме расхода топлива. Это топливо сжигает так неэффективно, что я решил, что это строго новый двигатель и я выставляю свою в стеклянной витрине.
Обновление: На самом деле мне очень нравится этот двигатель, и он находится в регулярном обслуживании.
Также см.
Фотография Ванкеля, установленная на Мой Стик 30
Внутренний выработки OS Wankel
Газовая турбина
Настоящий газотурбинный двигатель в миниатюре. Эти двигатели очень мощные и звучат точно так же, как их полноразмерные аналоги. Хотя они очень дорогие, их становится все больше. популярен среди тех, кто любит быстрые самолеты или строит масштабные модели реактивный самолет.
Импульсная струя
Эти двигатели очень мощные и громкие. Как правило, они используются только для скоростных моделей, так как у них нет возможности задушить их. Кроме того, они могут быть очень опасны и объявлен вне закона большинством R / C клубов.
PulseJetEngines.com содержит много информации о импульсных струях, а также планы, видео, форум и другая информация. Я знаю Джека об импульсных струях так что я не могу сказать, качественная ли информация, но они, кажется, знаю, о чем они говорят.
Выпускается много многоцилиндровых поршневых двигателей . Они доступны как горизонтально-оппозитные , рядные , V и радиальные . Как правило, эти двигатели имеют меньшая вибрация, чем у сингла сопоставимого размера, но они также имеют меньшую мощность для такое же полное водоизмещение.
См. также
Красивый радиальный Двигатели
Обычно я выбираю двигатель в верхней части диапазона, рекомендованного производитель. Например, если в комплекте предлагается двигатель от .25 до .40 тогда я буду использовать .40 или .45. Единственным реальным исключением являются комплекты 1/2A. что я обычно ставлю .10 или .15, если я думаю, что модель справится с этим.
Поскольку 4-тактный двигатель сопоставимого размера менее мощный, чем 2-тактный, Эмпирическое правило состоит в том, чтобы использовать 2-тактный размер примерно от 2/3 до 3/4 размера 4-тактного двигателя. Например, если самолет рассчитан на 2-тактный калибр .45, можно использовать 4-тактный .60. заменен. Если самолет рассчитан на .90 4-тактный, затем 0,60 2-тактный можно заменить. 4-тактные двигатели более экономичны, поэтому, если вы сделайте такой обмен, размер бака может остаться прежним.
Я тоже покупаю двигатели известных марок. Они все хороши. Авиадвигатели похожи на автомобили. Некоторые люди клянутся Фордом, а другие Чеви, но все они работать так же. Чего я не покупаю, так это двигателей и клонов магазинных марок. Причина этого в том, что я не знаю, кто на самом деле их сделал, и все они выглядят подозрительно похоже на О.С. двигатели.
Для меня это означает, что О.С. потратил деньги на разработку двигателя а потом кто-то другой купил, разобрал, измерил и сделал клон. Для них стоимость разработки составляет часть того, что заплатила ОС, и я просто не думаю, что это этично, и это может быть даже незаконно. Несмотря ни на что, я просто не покупайте их, но это мое личное отношение, и вы можете принять его за чего это стоит.
Обычно я не использую настроенные глушители, обычно называемые настроенными трубами, которые близкие, но разные. Стоимость настроенной системы плюс двигатель обычно такая же или больше, чем стоимость двигателя следующего размера. я не вижу смысла добавлять головную боль и сложность настроенной системы к самолет, когда я могу просто купить двигатель следующего размера. Если я уже есть двигатель, то я могу купить для него трубу, особенно если она больше двигатель не подходит к планеру.
Исключениями из моей философии могут быть соревнования, где объем двигателя ограничен. Другим исключением может быть если вы строите демона скорости. Скорость исходит непосредственно от оборотов в минуту, поэтому двигатель большего размера не получит большую скорость, но даст лучшее набор высоты и больше мощности для зависания и т. д. Но если вы хотите идти быстро, есть не является заменой RPM, именно для этого и предназначена настроенная система.
./../images/themes/10.jpg»>
Предыдущий Следующий
Модель самолета Двигатели Крепления двигателя для авиамоделей Двигатели
Комментарии к статье
Вернуться к модели авиадвигателей Аэродромные модели Главная
./../images/themes/10.jpg»>
Copyright 2003 Пол К. Джонсон
5 Исключительные модели двигателей самолетов
3D Insider поддерживается рекламой и зарабатывает деньги за клики, комиссионные от продаж и другими способами.
Радиоуправляемые пилоты, летающие на газовых самолетах, увлечены этим хобби. Эти модели предлагают невероятные впечатления от полета для энтузиастов. Но не все двигатели одинаковы, как и двигатели в электрических моделях. Есть хороший шанс, что у вас есть некоторый опыт, если вы ищете двигатель для новой модели самолета. 5 фаворитов здесь от Дле и О.С., и отметьте многие правильные поля.
Вы можете прочитать обзоры двигателей здесь, если вы любопытный новичок, проявляющий интерес к хобби. Я также включил несколько плюсов и минусов ниже для радиоуправляемых самолетов с нитродвигателем.
Бюджет
О.С. Двигатель 65AX Glow-Power
4,6/5,0
Размеры: 7,8 x 6,1 x 4,0 дюйма
Вес: 1,43 фунта.
Его головка выглядит фантастически и имеет лучшее охлаждение.
Check Amazon
Best Value
DLE-20RA 20cc Gas Engine
4.7/5.0
Dimensions: 8.8 x 7,9 x 4,5 дюйма
Вес: 1,92 фунта.
Это легко запускаемый радиоуправляемый двигатель с электронным зажиганием.
Check Amazon
Top Pick
DLE-61cc Gas Engine
4. 8/5.0
Dimensions: 11.6 x 9.4 x 6,1 дюйма
Вес: 4 фунта.
Прочный, долговечный и оснащенный двигателем мощностью 6 л.с.
Чек Amazon
RC Aircraft Engine Cons
Есть несколько моментов, которые новички должны учитывать при работе с радиоуправляемыми летательными аппаратами, работающими на газе. Они, как правило, стоят дороже, чем электрические самолеты, и требуют небольшого текущего обслуживания. Кривая обучения также выше. Бензиновые двигатели шумнее и грязнее, чем электродвигатели. У вас также есть текущие расходы, особенно топливо, которое требует безопасного хранения. Ремонт также может быть сложным и дорогостоящим.
RC Aircraft Engine Pros
Не позволяйте ничему из вышеперечисленного вас оттолкнуть. Опыт полета более реалистичен с самолетами с двигателями. А звуки, издаваемые этими красавцами, — музыка для ушей пилота. Время полета на топливном баке приличного размера будет больше, чем у моделей с батарейным питанием. Кроме того, вам не нужно менять батареи или заряжать их между рейсами. Наконец, дополнительный вес самолета с нитроуправлением делает его более устойчивым на ветру.
О моих обзорах двигателей для авиамоделей
Серьезные радиоуправляемые пилоты нуждаются в высококачественных деталях и компонентах. Представленные в этом руководстве 5 двигателей внутреннего сгорания RC с газовым двигателем вас не разочаруют. Этот короткий список является результатом личных исследований, мнений отраслевых экспертов и отзывов пользователей. Первые 3 — «Лучший бюджет», «Лучшее соотношение цены и качества», а затем «Лучший выбор» в указанном порядке. Воспользуйтесь приведенной ниже таблицей, чтобы перейти к интересующим вас отзывам. Таблица сравнения двигателей самолетов модели
Make and Model
Размеры
Вес
Прайс
. Радиоуправляемый авиационный двигатель 65AX накаливания
7,8 x 6,1 x 4 дюйма
1,43 фунта.
Проверить цену
DLE-20RA 20cc Бензиновый двигатель для радиоуправляемого самолета
8,8 x 7,9 x 4,5 дюйма
1,92 фунта.
Контрольная цена
Газовый радиоуправляемый авиационный двигатель DLE-61cc
11,6 x 9,4 x 6,1 дюйма
4 фунта.
Проверить цену
О.С. Четырехтактный самолетный двигатель FS-95V с кольцевым радиоуправлением
7,9 x 6,2 x 4,2 дюйма
1,30 фунта.
Узнать цену
Двигатели Dle Газовый радиоуправляемый двигатель DLE-35RA объемом 35 см3
5,6 x 9,1 x 9,9 дюйма
2,06 фунта.
Проверить цену
1. O.S. Радиоуправляемый самолет Glow 65AX | Лучший бюджет
Посмотреть на Amazon
Рейтинг редактора: 4,6/5
Лучший двигатель бюджетного радиоуправляемого самолета — 65AX. Он имеет глушитель E4010A и идеальное соотношение мощности и веса. Это отличный выбор для масштабных, спортивных и учебных самолетов.
О.С. Основные характеристики двигателей 65AX
65AX — это авиационные двигатели следующего поколения размера 60. Это 1,9 унции. легче оригинального 61FX, и это важно. В карбюраторе 61D есть угловой обратный игольчатый клапан для большей безопасности пилота. Такое расположение позволяет держать пальцы подальше от быстро вращающихся пропеллеров. Головка Angular выглядит фантастически и имеет лучшее охлаждение благодаря увеличенной площади поверхности.
Требования/рекомендации: Топливо для самолетов содержит 5–20 % нитрометана и не менее 18 % смазочного материала. Рекомендуемые реквизиты: 12 x 6, 13 x 6–7 или 14 x 6.
Краткие характеристики для O.S. 65AX Двигатель:
Рабочий объем: 0,65 куб. дюймов (10,6 см3)
Отверстие: 0,95 дюйма (24 мм)
Ход: 0,93 дюйма (23,5 мм)
Диапазон оборотов: от 2500 до 16000
Мощность: 1,73 л. с. при 16000 об/мин
Вес без глушителя: 17,5 унций. (497 г)
Вес с глушителем: 23 унции. (653 г)
В коробке:
Свеча накаливания #8
Карбюратор 61Д
Е-4010А Глушитель
Набор игольчатых удлинительных кабелей
Посмотреть на Amazon
2. Газовый двигатель для радиоуправляемого самолета DLE-20RA объемом 20 куб. см | Лучшее соотношение цены и качества
Посмотреть на Amazon
Рейтинг редактора: 4,7/5
Продукт с лучшим соотношением цены и качества достается модели DLE-20RA 20cc для газовых моделей. Это легко запускаемый радиоуправляемый двигатель с электронным зажиганием, задним выхлопом и переработанным глушителем.
Особенности двигателя DLE-20RA объемом 20 куб. см
Этот двигатель обладает всеми характеристиками двигателя DLE-20 с некоторыми улучшениями. Установка заднего выхлопа идеально подходит для самолетов с узким капотом. Dle также обновил электронный блок зажигания и снабдил двигатель более легким поршнем. Его очень легко установить благодаря расположению выхлопа и креплению на балке. И вы можете положиться на помповый карбюратор для постоянного потока топлива.
Требования/рекомендации: HCAM6416 Hobbico LifeSource 6,6 В 1100 мА 10C LifePack, неэтилированный газ, масло для 2-тактных двигателей. Рекомендуемые реквизиты: 14 х 10, 15 х 8, 16 х 6, 16 х 8 и 17 х 6,9.0214
Краткие характеристики двигателя DLE-20RA 20 куб.см:
Инвентарный номер: DLEG0420
Рабочий объем: 20,0 см3 (1,22 куб. дюйма)
Отверстие: 1,26 дюйма (32 мм)
Ход: 0,98 дюйма (25 мм)
Вес двигателя: 1,46 фунта. (660 г)
Вес глушителя: 2,8 унции. (80 г)
Вес модуля зажигания: 4,6 унции. (130 г)
Общий вес: 1,92 фунта (870 г)
Диапазон об/мин: 1700–9000
Мощность: 2,5 л. с. при 9000 об/мин
В коробке:
Электронный модуль зажигания
Глушитель
Свеча зажигания
Прокладка
Болты
Удлинитель рычага дроссельной заслонки
2 удлинителя выхлопной трубы
Руководство
Посмотреть на Amazon
3. Газовый радиоуправляемый авиационный двигатель DLE-61cc | Лучший выбор
Посмотреть на Amazon
Оценка редактора: 4,8/5
Выбор «Лучшее соотношение цены и качества» достается еще одному качественному продукту Dle. Это 3 DLE-61cc бензиновый радиоуправляемый самолетный двигатель. Это высокопроизводительная электростанция, специально предназначенная для серьезных пилотов радиоуправления.
Основные характеристики газового двигателя DLE-61cc
Газовый двигатель DLE-61cc — превосходный продукт. Он прочный, долговечный и может похвастаться мощностью 6 л.с. В двигателе используются детали, характерные для самолетов, такие как глушитель, карбюратор, электронное зажигание и стойки. Это надежный продукт, который обеспечивает выдающуюся производительность по привлекательной цене. А электронное зажигание обеспечивает быстрый и легкий запуск каждый раз при очень плавном холостом ходу.
Требования/рекомендации: бензин с октановым числом 87, масло для 2-тактных двигателей, 4,8–6 В NiMH/NiCd или 6,6 В Life или 7,4 В LiPo батарея для зажигания. Рекомендуемые винты: 22 x 10, 23 x 8, 23 x 10, 24 x 8.
Краткие характеристики двигателя самолета DLE-61cc:
4. O.S. FS-95V Кольцевой четырехтактный радиоуправляемый самолетный двигатель
Просмотреть на Amazon
Рейтинг редактора: 4,5/5
Это кольцевой четырехтактный радиоуправляемый самолетный двигатель накаливания FS-95V с глушителем от O.S. Он имеет классический вид, но с современными технологиями и высокой производительностью.
О.С. FS-95V Кольцевой радиоуправляемый двигатель Особенности
Двигатель FS-95V надежен и всегда обеспечивает постоянную мощность. Создатели нашли правильный баланс между быстрым сгоранием и эффективным охлаждением. Карбюратор двигателя находится на центральной линии. Это положение облегчает установку на различные радиоуправляемые самолеты. И аутентичный четырехтактный звук, создаваемый глушителем Jet Stream, является одной из его главных достопримечательностей.
Требования/рекомендации: Авиационная смесь 5–20 % нитрометана с содержанием смазки 18 %. Предлагаемые реквизиты: спорт и высший пилотаж 13 x 7–9., 14 х 6–8, масштаб 15 х 6–8.
Краткие характеристики для 4 O.S. FS-95V Кольцевой радиоуправляемый четырехтактный самолет Двигатель:
Рабочий объем: 0,951 куб. дюймов (15,59 см3)
Отверстие: 1,142 дюйма (29,0 мм)
Ход: 0,929 дюйма (23,8 мм)
Практические об/мин: 2100–11000 об/мин
Выходная мощность: 1,7 пс / 10000 об/мин
Глушитель Вес: 2,05 унции. (58 г)
Общий вес: 20,88 унций. (592 г)
Размер коленчатого вала: 5/16–24
В коробке:
O.S. Двигатель 4-тактный ФС-95В
Свеча накаливания типа F
Глушитель струйного потока
Коллектор с контргайками
Руководство по эксплуатации
Посмотреть на Amazon
5. Газовый радиоуправляемый двигатель DLE-35RA объемом 35 куб. см
Посмотреть на Amazon
ДЛЭ-35РА. Это 35-кубовый радиоуправляемый бензиновый двигатель с электронным зажиганием и задним выхлопом.
Двигатель DLE-35RA объемом 35 куб. см Основные характеристики
Этот двигатель обеспечивает на 400 оборотов в минуту больше, чем меньший по размеру DLE-30. Он может похвастаться более легким поршнем и переработанным глушителем. Задний выхлоп делает установку намного проще благодаря более узким обтекателям самолета. Электронный блок зажигания тоже обновился и каждый раз запускается быстро. И пилоты могут выполнять акробатические полеты, зная, что карбюратор обеспечивает подачу топлива туда, где это необходимо.
Требования/рекомендации: неэтилированный бензин, масло, батарея зажигания, ресивер HCAM6426 Hobbico LiFeSource 6,6 В 1800 мАч 10C LiFe. Предлагаемый реквизит: XOAQ1810 Xoar 18 x 10 Beechwood.
Краткие характеристики двигателя DLE-35RA 35 куб. см:
Рабочий объем: 34,5 куб. см (2,13 куб. дюйма)
Отверстие: 1,5 дюйма (38,5 мм)
Степень сжатия: 7,6:1
Статическая тяга: 9,5 кг (сила тяги/высота 100 м)
Тяговое усилие 7,8 кг / высота над уровнем моря 1800 м
Газомасляная смесь: 30:1
Бензин Октановое число: 87
Вес двигателя: 2,06 фунта. (936 г)
Глушитель Вес: 2,61 унции. (74 г)
Вес модуля зажигания: 5,26 унции. (147 г)
Мощность: 4,1 л.с. при 8500 об/мин
В коробке:
Газовый двигатель DLE 35-RA
Электронное зажигание
Глушитель
Свеча зажигания DLE CM6
4 опоры двигателя с монтажным оборудованием
Встроенная направляющая штока
Задний карбюратор
Руководство по инструкциям
Просмотр на Amazon
Содержание
RC Aircraft Mantgine Cons
RC Aircraft Engine Pros
О мои модельные двигатели Airplane ’Reviews
Модельные авиационные авиационные модели Engines Ennignes Compecore
Модельные авиационные авиационные модели Engines Engines Compecore
Модельные авиационные авиационные авиационные нормы. Радиоуправляемый самолет Glow 65AX | Лучший бюджет
Двигательные установки на борту транспортного средства предназначены для создания силы тяги или момента импульса. В последние десятилетия все большее внимание уделяется таким характеристикам как расход топлива и создаваемая тяга. Все большее внимание начинает уделяться разработкам ядерных двигателей на транспортных средствах. Одной из наиболее перспективных областей применения ядерных ракетных двигателей является космонавтика. В настоящее время для полетов на другие планеты, не говоря уж о звездах, применение жидкостных ракетных двигателей и твердотопливных ракетных двигателей становится все более невыгодным, хотя и было разработано множество ракетных двигателей. Таким образом, для достижения пилотируемыми экипажами даже ближайших планет необходимо развивать ракетоносители на двигателях, работающих на принципах, отличных от химических двигательных установок. Наиболее перспективными в этом плане являются электрические реактивные двигатели, лазерные реактивные двигатели и ядерные реактивные.
1. Силовые установки
Ядерная силовая установка (ЯСУ) — это силовая установка, работающая на энергии цепной реакции деления ядра. ЯСУ состоит из ядерного реактора и паро- или газотурбинной установки, в которой тепловая энергия, выделяющаяся в реакторе, преобразуется в механическую или электрическую энергию. Преимуществами подобной установки являются неограниченная автономность передвижения (дальность хода), и большая мощность двигателей: и как следствие, возможность длительно использовать высокую скорость движения, транспортировать более тяжёлые грузы и способность работать в тяжёлых условиях.
Основная сфера применения ЯСУ — морской флот: как надводный, так и подводный, также потенциально ЯСУ может быть использована в автомобильном, железнодорожном, авиационном и космическом транспортном средстве.
Рис. 1. Схема отсеков атомной подводной лодки проекта 949А «Антей»
Атомный флот. Название атомохо́д (атомное судно) носят суда, использующие ядерную энергетическую установку в качестве двигателя. Различают атомоходы гражданские (атомные ледоколы, транспортные суда) и военные (авианосцы, подводные лодки, крейсеры, тяжёлые фрегаты). Первым в мире атомоходом является подводная лодка «Наутилус», построенная в 1954 году в США.
Рассмотрим подробнее внутреннее строение атомной подводной лодки (АПЛ) на примере отечественной субмарины проекта 949А «Антей» (рис. 1). Для повышения живучести создатели продублировали многие важные компоненты этой АПЛ. Такие лодки получили по паре реакторов, турбин и винтов. Выход из строя одного из них, согласно задумке, не должен стать для лодки смертельным. Все 10 отсеков субмарины разделяют межотсечные переборки: они рассчитаны на давление в 10 атмосфер и сообщаются люками, которые можно герметизировать, если это необходимо.
В пятом отсеке находится вырабатывающий энергию дизель-генератор. Тут же можно видеть электролизную установку для регенерации воздуха, компрессоры высокого давления, щит берегового питания, запасы дизтоплива и масла. Помещение 5-бис нужно для деконтаминации, т.е. удаления радиоактивных веществ с поверхностей и снижении уровня загрязнения радиоактивными веществами членов экипажа, которые работали в отсеке с реакторами. Шестой отсек, находится в самом центре АПЛ. Он имеет особую важность, ведь именно здесь находятся два ядерных реактора мощностью по 190 МВт. Реактор относится к серии ОК-650 – это серия водо-водяных ядерных реакторов на тепловых нейтронах. Роль ядерного топлива исполняет высокообогащенная по 235U двуокись урана. Отсек имеет объем 641 м³. Над реактором находятся два коридора, позволяющие попасть в другие части АПЛ. Атомным подводным флотом обладают шесть стран: США, Россия, Великобритания, Франция, Китай и Индия, имеющие суммарно более ста АПЛ на вооружении. Гражданским атомным флотом располагает Россия. В него входят два атомных ледокола типа Арктика с двухреакторной ядерной энергетической установкой мощностью 75 тысяч лошадиных сил и два ледокола типа Таймыр с однореакторной установкой мощностью 40 тысяч лошадиных сил, а также атомный лихтеровоз. Россия является мировым лидером в применении атомного ледокольного флота в морях Арктики и неарктических замерзающих морях. В первую очередь это транзитная навигация по трассам Северного морского пути, имеющем исключительно важное экономическое значение как на национальном, так и на международном уровне.
Неудавшиеся проекты применения ЯСУ. В силу трудностей при использовании ядерной силовой установки не все проекты по её применению могли быть осуществлены. Например, атомовоз — автономный локомотив, приводимый в движение за счёт использования атомной энергии разрабатывался в середине 20-го века, как и атомолёт, но из-за множества нерешённых проблем, в том числе с обеспечением безопасности, проекты были закрыты.
2. Ядерные ракетные двигатели (ЯРД)
Ракетный двигатель является единственным почти освоенным способом вывода полезной нагрузки на орбиту Земли [1, 3]. За счёт преобразования исходной энергии в кинетическую энергию реактивной струи реактивного тела в ракетном двигателе возникает сила тяги. Классификацию ракетных двигателей можно провести по виду энергии, которая преобразуется в кинетическую энергию реактивной струи. Различают такие виды, как химические, ядерные и электрические ракетные двигатели.
Показателем эффективности ракетного двигателя является удельный импульс (иногда применяется термин «удельная тяга») — отношение количества движения, получаемого ракетным двигателем, к массе израсходованного рабочего тела. Размерность удельного импульса совпадает с размерностью скорости, то есть м/с. Теоретически (при условии равенства давления окружающей среды и давления газов в срезе сопла) удельный импульс равен скорости истечения рабочего тела из сопла, но фактически может от неё отличаться.
История создания ЯРД. Ядерный ракетный двигатель вырабатывает энергию не при сгорании топлива, как в химическом РД, а в результате нагревания рабочего тела энергией ядерных реакций. Традиционный двигатель этого типа состоит из нагревательной камеры с ядерным реактором, как источником тепла, системы подачи рабочего тела, и сопла. Рабочее тело (в большинстве случаев — водород) — подаётся из бака в активную зону реактора, где, проходя через нагретые реакцией ядерного распада каналы, разогревается до высоких температур и затем выбрасывается через сопло, создавая реактивную тягу.
Конструкция и принцип работы ЯРД были разработаны еще в 50-х годах. Уже в 70-х годах в США и СССР были готовы экспериментальные образцы, которые успешно проходили испытания. Твердофазный советский двигатель РД-0410 с тягой в 3.6 тонны испытывался на стендовой базе, а американский реактор «NERVA» по плану должен был быть установлен на ракету «Сатурн V», однако спонсирование лунной программы было остановлено. Параллельно велись работы и над созданием газофазных ЯРД.
Рис. 2. Модель американского двигателя «Nerva»
2.1. Устройство и принцип действия ЯРД.
Ядерные ракетные двигатели бывают газофазными, жидкофазными и твердофазными в зависимости от агрегатного состояния ядерного топлива. Также они могут подразделяться на жидкостные и импульсно-взрывные. Жидкостные ядерные ракетные двигатели используют нагрев жидкого рабочего тела в нагревательной камере от ядерного реактора и вывод газа через сопло, а импульсно-взрывные основаны на создании ядерных взрывов малой мощности через равные промежутки времени.
ТЯРД может использовать различные виды термоядерных реакций в зависимости от вида применяемого топлива. В частности, на настоящее время принципиально осуществимы следующие типы реакций:
Реакция дейтерий + тритий (топливо D-T)
2H + 3H = 4He + n + 17.6 МэВ
Такая реакция наиболее легко осуществима с точки зрения современных технологий, даёт значительный выход энергии, топливные компоненты относительно дёшевы. Недостаток её — весьма большой выход нежелательной (и бесполезной для прямого создания тяги) нейтронной радиации, уносящей большую часть выходной энергии реакции и, как следствие, резко снижающей КПД двигателя. Тритий радиоактивен, период его полураспада около 12 лет, то есть долговременное хранение трития невозможно. В то же время, возможно окружить дейтериево-тритиевый реактор оболочкой, содержащей литий: последний, в результате облучения нейтронным потоком, превращается в тритий, что приводит к замыканию топливного цикла, поскольку реактор работает в режиме размножителя (бридера). Таким образом, топливом для D-T-реактора фактически служат дейтерий и литий.
Реакция дейтерий + гелий-3
2H + 3He = 4He + p + 18.3 МэВ
Условия её достижения значительно сложнее. Гелий-3, кроме того, редкий и чрезвычайно дорогой изотоп. В промышленных масштабах на настоящее время не производится. Кроме того, что энергетический выход этой реакции выше, чем у D-T-реакции, она имеет следующие дополнительные преимущества:
Сниженный нейтронный поток (реакцию можно отнести к «безнейтронным»),
Меньшая масса радиационной защиты,
Меньшая масса магнитных катушек реактора.
При реакции D-3He в форме нейтронов выделяется всего около 5% мощности (против 80% для D-T). Около 20% выделяется в форме рентгеновского излучения. Вся остальная энергия может быть непосредственно использована для создания реактивной тяги. Таким образом, реакция D-3He намного более перспективна для применения в реакторе ТЯРД.
Другие виды реакций
Реакции между ядрами дейтерия (D-D, монотопливо):
2H + 2H → 3He + n + 3.3 МэВ,
2H + 2H →> 3H + p + 4 МэВ.
Нейтронный выход в данном случае весьма значителен.
Возможны и некоторые другие типы реакций:
p + 6Li → 4He (1.7 MeV) + 3He (2.3 MэВ)
3He + 6Li → 24He + p + 16.9 MэВ
p + 11B → 34He + 8.7 MэВ
Рис. 3 Строение жидкофазного ядерного двигателя
Рабочее тело, контактируя с ТВЭЛом, поглощает энергию и нагревается, увеличивается в объеме, после чего выходит через сопло двигателя под высоким давлением.
Принцип работы жидкофазного ЯРД и его устройство аналогично твердофазным, только топливо находится в жидком состоянии, что позволяет увеличить температуру, а значит и тягу.
Газофазные ЯРД работают на топливе в газообразном состоянии. Газообразное топливо может удерживаться в корпусе электрическим полем или же находится в герметичной прозрачной колбе – ядерной лампе. В первом случае возникает контакт рабочего тела с топливом, а также частичная утечка последнего, поэтому кроме основной массы топлива в двигателе должен быть предусмотрен его запас для периодического пополнения. В случае с ядерной лампой утечки не происходит, а топливо полностью изолировано от потока рабочего тела.
2.2 Ядерный импульсный двигатель
В основе импульсного двигателя для космического аппарата лежит концепция атомного взрыва. Атомные заряды мощностью примерно в килотонну на этапе взлёта должны были взрываться со скоростью один заряд в секунду. Ударная волна — расширяющееся плазменное облако — должна была приниматься «толкателем» — мощным металлическим диском с теплозащитным покрытием, и, потом, отразившись от него, создать реактивную тягу. Импульс, принятый плитой толкателя, через элементы конструкции передавался кораблю. Затем, когда высота и скорость вырастут, частоту взрывов можно было уменьшить. При взлёте корабль должен был лететь строго вертикально, с целью минимизировать площадь радиоактивного загрязнения атмосферы. В США были проведены несколько испытаний модели летательного аппарата с импульсным приводом (для взрывов использовалась обычная химическая взрывчатка). Получены положительные результаты о принципиальной возможности управляемого полёта аппарата с импульсным двигателем. В США космические разработки с использованием импульсных ядерных ракетных двигателей осуществлялись с 1958 по 1965 год в рамках проекта «Орион» компанией «General Atomics») по заказу ВВС США. Программа развития проекта «Орион» была рассчитана на 12 лет. Однако приоритеты изменились, и в 1965 году проект был закрыт. В СССР аналогичный проект разрабатывался в 1950—70-х годах. Основной проблемой была прочность экрана-толкателя, который не выдерживал огромных тепловых нагрузок от близких ядерных взрывов. Вместе с тем были предложены несколько технических решений, позволяющих разработать конструкцию плиты-толкателя с достаточным ресурсом. Проект не был завершён. Реальных испытаний импульсного ЯРД с подрывом ядерных устройств не проводилось.
2.3 Другие разработки
В 1960-х годах США были на пути к Луне. Менее известным является тот факт, что на полигоне Невады учёные работали над одним амбициозным проектом — полётом на Марс на ядерных двигателях. Проект был назван NERVA. В январе 1965 года были произведены испытания ядерного ракетного двигателя под кодовым названием «КИВИ» (KIWI). При испытаниях реактору ЯРД специально позволили перегреться. При температуре в 4000 °C реактор взорвался. Пять месяцев спустя произошла настоящая авария, когда перегрелся ядерный двигатель другой сборки, который носил кодовое название Феб (Phoebus).
Также в США разрабатывался ядерный ракетный двигатель прямоточной конструкции в рамках проекта Pluto (рис. 4). Американцы сумели создать два прототипа нового двигателя — Tory-IIA и Tory-IIC, на которых даже производились включения реакторов. Мощность установки должна была составить 600 мегаватт.
Рис. 4. Прототип двигателя в рамках проекта Pluto
Двигатели, разработанные в рамках проекта Pluto, планировалось устанавливать на крылатые ракеты, которые в 1950-х годах создавались под обозначением SLAM (Supersonic Low Altitude Missile (сверхзвуковая маловысотная ракета)). Планировалось построить ракету длиной 26.8 метра, диаметром три метра, и массой в 28 тонн. В корпусе ракеты должен был располагаться ядерный боезаряд, а также ядерная двигательная установка, имеющая длину 1.6 метра и диаметр 1.5 метра. На фоне других размеров установка выглядела весьма компактной, что и объясняет её прямоточный принцип работы.
Разработчики полагали, что, благодаря ядерному двигателю, дальность полета ракеты SLAM составит, по меньшей мере, 182 тысячи километров.
В 1964 году министерство обороны США проект закрыло. Официальной причиной послужило то, что в полете крылатая ракета с ядерным двигателем слишком сильно загрязняет все вокруг. Но в действительности причина состояла в значительных затратах на обслуживание таких ракет, тем более к тому времени бурно развивалось ракетостроение на основе жидкостных реактивных ракетных двигателей, обслуживание которых было значительно дешевле.
Рис. 5. Двигатель РД-0410
СССР оставался верной идеи создания ЯРД прямоточной конструкции значительно дольше, чем США, закрыв проект только в 1985 году. Но и результаты получились значительно весомее. Так, первый и единственный советский ядерный ракетный двигатель был разработан в конструкторском бюро «Химавтоматика», Воронеж. Это РД-0410 (Индекс ГРАУ — 11Б91, известен также как «Ирбит» и «ИР-100»).
В РД-0410 (рис. 5) был применён гетерогенный реактор на тепловых нейтронах, замедлителем служил гидрид циркония, отражатели нейтронов были выполнены из бериллия, в качестве ядерного топлива служил материал на основе карбидов урана и вольфрама, с обогащенный изотопом 235U до концентрации около 80 %.
Конструкция включала в себя 37 тепловыделяющих сборок, покрытых теплоизоляцией, отделявшей их от замедлителя. Проектом предусматривалось, что поток водорода вначале проходил через отражатель и замедлитель, поддерживая их температуру на уровне комнатной, а затем поступал в активную зону, где охлаждал тепловыделяющие сборки, достигая при этом температур до 3100 К. На стенде и отражатель, и замедлитель охлаждались отдельным потоком водорода.
Реактор прошёл значительную серию испытаний, но ни разу не испытывался на полную длительность работы. Однако вне реакторные узлы были отработаны полностью.
Технические характеристики РД 0410 [9]:
Тяга в пустоте: 3,59 тс (35,2 кН)
Тепловая мощность реактора: 196 МВт
Удельный импульс тяги в пустоте: 910 кгс·с/кг (8927 м/с)
Относительно небольшие габаритные размеры и вес, высокая температура ядерного топлива (3100 K) при эффективной системе охлаждения потоком водорода свидетельствует о том, что РД-0410 является почти идеальным прототипом ЯРД для современных крылатых ракет. А, учитывая современные технологии получения самоостанавливающегося ядерного топлива, увеличение ресурса с часа до нескольких часов является вполне реальной задачей.
Также в настоящее время ведется разработка ядерной электродвигательной установки — двигательной установки космического аппарата, включающая в себя комплекс бортовых систем, таких как: электрический ракетный двигатель, система электропитания, обеспечиваемого ядерным реактором, система хранения и подачи рабочего тела, система автоматического управления.
3. Проблема межпланетных полетов
3.1 Использование гравитационного маневра при полете к Марсу
Рассмотрим изменение характеристической скорости при полёте с околоземной круговой (опорной) орбиты к Марсу с использованием гравитационного манёвра у Луны [7].
Рис. 6. Эллиптическая орбита Гомана
Для перехода с круговой орбиты Земли вокруг Солнца на эллиптическую орбиту перелёта к Марсу (орбиту Гомана) необходима дополнительная характеристическая скорость (рис. 6) [8]:
где Vкр1 – первая (круговая) скорость относительно Солнца на орбите Земли, R1 – радиус орбиты Земли, R2 – радиус орбиты Марса.
Но, чтобы выйти на круговую орбиту Земли вокруг Солнца, нужно выйти из сферы притяжения Земли, т.е. получить вторую космическую (параболическую) Vпар01 = √2Vкр01 скорость относительно Земли. Следовательно, мы должны дать космическому аппарату такую кинетическую энергию на околоземной круговой орбите, что бы её хватило на выход из сферы притяжения Земли и переход на эллиптическую орбиту перелёта к Марсу (рис. 7)
Рис. 7. 1 – Орбита Земли вокруг Солнца, 2 – Эллиптическая орбита Гомана
Здесь V1 – скорость отлёта из неподвижной относительно Земли точки, расположенной на круговой околоземной орбите. Учитывая, что мы уже движемся по этой орбите с круговой скоростью, для окончательной скорости отлёта к Марсу требуется скорость
Аналогично для перехода с эллиптической орбиты на орбиту вокруг Марса имеем
где
Здесь
– первая (круговая) скорость относительно Марса, – первая (круговая) скорость на орбите Земли (рис. 6),
– первая (круговая) скорость на орбите Марса (рис. 6), – первая (круговая) скорость относительно Земли, μ = GM – произведение массы тела M на гравитационную постоянную G. Значения параметра μ для Солнца, Земли и Марса μс = 1.327·1020 м3/с2, μз = 3.99·1014 м3/с2, μмар = 4.228·1013 м3/с2
С учётом дополнительных затрат на управление и ориентацию (добавляем 5%) получим полную характеристическую скорость:
Vхар1 = 1.05·(ΔVз + ΔVмар).
Если использовать гравитационный манёвр, то характеристическая скорость уменьшится
Vхар2 = Vхар1 – ΔVграв
Соответственно выигрыш в скорости составит
Проведём расчёт характеристической скорости с учетом следующих значений радиусов орбит движения Земли и Марса вокруг Солнца:
R1 = 1. 5·1011 м, R2 = 2.28·1011 м,
а также примем значения радиусов околоземной орбиты и орбиты около Марса
R01 = 6.8·106 м, R02 = 3.4·106 м
Максимальная скорость, которую мы можем получить при использовании гравитационного маневра у Луны, равняется:
Выигрыш в скорости при использовании гравитационного маневра
ΔV% = 26.8%.
При дальнейших расчетах будем использовать значение скорости ΔVхар2 так как это позволяет нам сэкономить топливо.
3.2 Время полета к Марсу по орбите Гомана
Также необходимо рассчитать время полета к Марсу по выбранной нами траектории. Для этого используем формулы [8]:
Тогда время полета составит: Т ≈ 260 суток.
3.3 Сравнение затрат топлива жидкостного (Ж) и твердофазного ядерного (ТЯ) ракетного двигателя при полете к Марсу
Для нахождения массы топлива используем формулу К. Э. Циолковского [3]:
Vхар2 = Vк – V0 = Wln(1 + Mт/Mк),
где Mт − масса топлива, Mк − конечная масса ракеты (без топлива), Vк − конечная скорость полета, V0 − начальная скорость, W − скорость истечения газов из двигателя. Обозначим:
Тогда
Здесь: kТО – весовой коэффициент топливного отсека, kсу – весовой коэффициент системы управления, kду – весовой коэффициент двигательной установки, n – коэффициент перегрузки, g0 – ускорение силы тяжести,Mпг – масса полезного груза. Также можно рассчитать какой процент топлива мы сэкономим при использовании ТЯРД по формуле:
Произведем расчеты при следующих параметрах для ЖРД и ЯРД:
ЖРД: W = 4599 м/с, kду = 0. 001, kсу = 0.01, kТО = 0.1 ЯРД: W = 9000 м/с, kду = 0.01, kсу = 0.01, kТО = 0.1 n = 1, g = 9.81 мс-2, Mпг = 128000 кг
Тогда имеем: Dж = 1.65, Dя = 0.63, Mж = 269903 кг, Mя = 105994 кг
Соответствующая экономия топлива составит ΔM = 69.7%. Таким образом, использование гравитационного маневра у Луны дает значительный выигрыш в скорости, также следует отметить преимущество использования ТЯРД перед ЖРД.
Заключение
Преимущество, заключающееся в высоком показателе удельного импульса ядерных ракетных двигателей по сравнению с химическими, очевидно. Для твердофазных моделей величина удельного импульса составляет 8000-9000 м/с, для жидкофазных – 14000 м/с, для газофазных – 30000 м/с. Однако, когда речь идет о ядерном топливе, никогда не следует забывать о пагубном воздействии на экологию нашей планеты. Так и в случае с ядерными ракетными двигателями необходимо учитывать загрязнение атмосферы Земли. Поэтому, несмотря на существование действующих моделей ядерных ракетных двигателей, пока ни один из них так и не был задействован вне лабораторий или научных баз. Потенциал таких двигателей высочайший, однако, и риск, связанный с их использованием, тоже немалый, так что пока они существуют только в проектах.
Литература
Новый политехнический словарь / Гл. ред. А.Ю. Ишлинский. — М.: Большая Российская энциклопедия, 2000.
Рылев Ю. 6000 изобретений XX и XXI веков, изменившие мир. М.: Эксмо. 2017.
Космонавтика: Энциклопедия. М.: Сов. Энциклопедия, 1985
Феодосьев В.И. Основы техники ракетного полета. М.: Наука, 1979.
Свободная интернет-энциклопедия Википедия.
Дорофеев А.А. Основы теории тепловых ракетных двигателей. М.: Изд. МГТУ им. Н. Э. Баумана, 2014.
Руппе Г. Введение в астронавтику.- М.: Наука, 1970.
Фертрегт М. Основы космонавтики.- М.: Просвещение, 1969.
Ракетные двигатели на жидком топливе дали человеку возможность выйти в космос — на околоземные орбиты. Однако подобные ракеты сжигают 99% топлива за первые несколько минут полёта. Остатка топлива может не хватить для путешествия на другие планеты, да и скорость будет настолько малой, что вояж займёт десятки или сотни лет. Решить проблему могут ядерные двигатели. Как? Будем разбираться вместе.
Эта статья была опубликована в журнале OYLA №4(20). Оформить подписку на печатную и онлайн-версию можно здесь.
Принцип работы реактивного двигателя очень прост: он переводит топливо в кинетическую энергию струи (закон сохранения энергии), за счёт направления этой струи ракета движется в пространстве (закон сохранения импульса). Важно понимать, что мы не можем разогнать ракету или самолёт до скорости большей, чем скорость истечения топлива — раскалённого газа, выбрасываемого назад.
Космический аппарат New Horizons
Что же отличает эффективный двигатель от неудачного или устаревшего аналога? Прежде всего то, сколько топлива потребуется двигателю, чтобы разогнать ракету до нужной скорости. Этот важнейший параметр ракетного двигателя называется удельный импульс, который определяется как отношение общего импульса к расходу топлива: чем больше этот показатель, тем эффективнее ракетный двигатель. Если ракета практически целиком состоит из топлива (это означает, что в ней нет места для полезного груза, предельный случай), удельный импульс можно считать равным скорости истечения топлива (рабочего тела) из ракетного сопла. Запуск ракеты — крайне дорогостоящее мероприятие, учитывается каждый грамм не только полезного груза, но и топлива, которое тоже весит и занимает место. Поэтому инженеры подбирают всё более и более активное горючее, единица которой давала бы максимальную отдачу, увеличивая удельный импульс.
Подавляющее большинство ракет в истории и современности было оборудовано двигателями, использующими химическую реакцию горения (окисления) топлива.
Они позволили достичь Луны, Венеры, Марса и даже планет дальнего пояса — Юпитера, Сатурна и Нептуна. Правда, космические экспедиции заняли месяцы и годы (автоматические станции Pioneer, Voyager, New Horizons и др.). Необходимо отметить, что все подобные ракеты расходуют значительную часть топлива для отрыва от Земли, и далее продолжают полёт по инерции с редкими моментами включения двигателя.
Космический аппарат Pioneer
Подобные двигатели подходят для вывода ракет на околоземную орбиту, но, чтобы её разогнать хотя бы до четверти скорости света, понадобится невероятное количество топлива (расчёты показывают, что нужно 103200 грамм топлива, при том, что масса нашей Галактики не более 1056 грамма). Очевидно, что для достижения ближайших планет, а тем более звёзд, нам необходимы достаточно большие скорости, обеспечить которые жидкотопливные ракеты не в состоянии.
Газофазный ядерный двигатель
Дальний космос — дело совсем другое. Взять хотя бы Марс, «обжитый» фантастами вдоль и поперёк: он хорошо изучен и научно перспективен, а самое главное — близок как никто другой. Дело — за «космическим автобусом», который сможет доставить туда экипаж за разумное время, то есть, как можно быстрее. Но с межпланетным транспортом есть проблемы. Его сложно разогнать до нужной скорости, сохранив при этом приемлемые размеры и потратив разумное количество топлива.
RS-25 (Rocket System 25) — жидкостный ракетный двигатель компании Рокетдайн, США. Применялся на планере космической транспортной системы «Space Shuttle», на каждом из которых было установлено три таких двигателя. Более известен как двигатель SSME (англ. Space Shuttle Main Engine — главный двигатель космического челнока).
Основными компонентами топлива являются жидкий кислород (окислитель) и водород (горючее). RS-25 использует схему закрытого цикла (с дожиганием генераторного газа).
Решением может быть «мирный атом», толкающий космические корабли. О создании лёгкого и компактного устройства, способного вывести на орбиту хотя бы самого себя, инженеры задумались ещё в конце 50‑х годов прошлого века. Главное отличие ядерных двигателей от ракет с двигателями внутреннего сгорания в том, что кинетическая энергия получается не за счёт сгорания топлива, а за счёт тепловой энергии распада радиоактивных элементов. Давайте сравним эти подходы.
Из жидкостных двигателей выходит раскалённый «коктейль» выхлопных газов (закон сохранения импульса), образующихся при реакции топлива и окислителя (закон сохранения энергии). В большинстве случаев это комбинация кислорода и водорода (результат горения водорода — обычная вода). h3O обладает гораздо большей молярной массой, чем водород или гелий, поэтому её труднее разогнать, удельный импульс для подобного двигателя 4 500 м/с.
Наземные испытания NASA новой системы запуска космических ракет, 2016 год (штат Юта, США). Эти двигатели будут установлены на космический корабль Orion, на котором планируется миссия на Марс.
В ядерных двигателях предлагается использовать только водород и разгонять (разогревать) его за счёт энергии ядерного распада. Тем самым идёт экономия на окислителе (кислороде), что уже замечательно, но не всё. Так как у водорода относительно малая удельная масса, нам проще его разогнать до более высоких скоростей. Конечно, можно использовать и другие тепловосприимчивые газы (гелий, аргон, аммиак и метан), но все они не менее чем в два раза проигрывают водороду в самом главном — достижимом удельном импульсе (более 8 км/c).
Так стоит ли его терять? Выигрыш настолько велик, что инженеров не останавливает ни сложность конструкции и управления реактором, ни его большой вес, ни даже радиационная опасность. Тем более никто и не собирается стартовать с поверхности Земли — сборка таких кораблей будет вестись на орбите.
«Летающий» реактор
Как работает ядерный двигатель? Реактор в космическом двигателе намного меньше и компактнее своих наземных аналогов, но все основные компоненты и механизмы управления принципиально те же. Реактор выступает в роли нагревателя, в который подаётся жидкий водород. Температуры в активной зоне достигают (и могут превышать) 3000 градусов. Затем разогретый газ выпускают через сопло.
Однако такие реакторы испускают вредные радиационные излучения. Для защиты экипажа и многочисленного электронного оборудования от радиации нужны основательные меры. Поэтому проекты межпланетных кораблей с атомным движком часто напоминают зонтик: двигатель располагается в экранированном отдельном блоке, соединённом с основным модулем длинной фермой или трубой.
«Камерой сгорания» ядерного двигателя служит активная зона реактора, в которой подаваемый под большим давлением водород нагревается до 3000 и более градусов. Этот предел определяется только жаропрочностью материалов реактора и свойствами топлива, хотя повышение температуры увеличивает удельный импульс.
Тепловыделяющие элементы — это жаропрочные ребристые (для повышения площади теплоотдачи) цилиндры-«стаканы», заполненные урановыми таблетками. Они «омываются» потоком газа, играющего роль и рабочего тела, и охладителя реактора. Вся конструкция изолирована бериллиевыми экранами-отражателями, не выпускающими опасное радиационное излучение наружу. Для управления выделением тепла рядом с экранами расположены специальные поворотные барабаны
Существует ряд перспективных конструкций ядерных ракетных двигателей, реализация которых ждёт своего часа. Ведь в основном они будут применяться в межпланетных путешествиях, которые, судя по всему, уже не за горами.
Проекты ядерных двигателей
Эти проекты были заморожены по разным причинам — недостаток денег, сложность конструкции или даже необходимость сборки и установки в открытом космосе.
«ОРИОН» (США, 1950–1960)
Проект пилотируемого ядерно-импульсного космического корабля («взрыволёт») для исследования межпланетного и межзвёздного пространства.
Принцип работы. Из двигателя корабля, в направлении противоположном полёту, выбрасывается ядерный заряд небольшого эквивалента и подрывается на сравнительно малой дистанции от корабля (до 100 м). Ударная сила отражается от массивной отражающей плиты в хвосте корабля, «толкая» его вперёд.
«ПРОМЕТЕЙ» (США, 2002–2005)
Проект космического агентства NASA по разработке ядерного двигателя для космических аппаратов.
Принцип работы. Двигатель космического корабля должен был состоять из ионизированных частиц, создающих тягу, и компактного ядерного реактора, обеспечивающего установку энергией. Ионный двигатель создаёт тягу порядка 60 грамм, но сможет работать постоянно. В конечном счёте, корабль постепенно сможет набрать огромную скорость — 50 км/сек, затратив минимальное количество энергии.
«ПЛУТОН» (США, 1957–1964)
Проект по разработке ядерного прямоточного воздушно-реактивного двигателя.
Принцип работы. Воздух через переднюю часть транспортного средства попадает в ядерный реактор, в котором нагревается. Горячий воздух расширяется, приобретает большую скорость и высвобождается через сопло, обеспечивая необходимую тягу.
NERVA (США, 1952–1972)
(англ. Nuclear Engine for Rocket Vehicle Application) — совместная программа Комиссии по атомной энергии США и NASA по созданию ядерного ракетного двигателя.
Принцип работы. Жидкий гидрогель подаётся в специальный отсек, в котором происходит его нагревание ядерным реактором. Горячий газ расширяется и высвобождается в сопле, создавая тягу.
Тэги:
технологиикак это работаеткосмостранспорткак это устроено
Как работают ракетные двигатели?
Сообщение опубликовано: 6 апреля 2020 г.
Категория сообщения: Ракетная наука
Время чтения: 5 минут чтения
В этой короткой статье мы разберемся с ракетными двигателями , их принципом работы и различными типами.
Миф: Ракета работает, прикладывая силу к земле, и земля толкает ракету вверх.
Пересматривая 3-й закон Ньютона
Правда: Ракета работает, прилагая силу к топливу (и выбрасывая его). Масса топлива действует на ракету в противоположном направлении. Это также видно по тому факту, что ракета продолжает ускоряться даже вдали от земли (!).
Работу ракеты обычно объясняют с помощью третьего закона Ньютона (см. рисунок выше). Согласно третьему закону Ньютона силы действия и противодействия действуют на две разные поверхности/объекты. В случае ракет это два объекта: сама «ракета» и «вылетающее топливо». Это очень похоже на случай человека, стоящего на лодке (помещенной в воду). Когда он отбрасывает тяжелую массу, это действие вызывает реакцию, заставляющую лодку (и человека) двигаться в противоположном направлении.
Принцип работы
Ракетные двигатели создают тягу за счет выбрасывания выхлопной жидкости, разогнанной до высокой скорости через метательное сопло. Жидкость обычно представляет собой газ, образующийся при сгорании под высоким давлением твердого или жидкого топлива, состоящего из компонентов топлива и окислителя, в камере сгорания. По мере расширения газов через сопло они разгоняются до очень высокой (сверхзвуковой) скорости, и реакция на это толкает двигатель в противоположном направлении. Горение чаще всего используется для практических ракет, поскольку для наилучших характеристик желательны высокие температуры и давления.
Различные секции [1-6] ракеты в контексте ракетного двигателя и топлива
На приведенном выше изображении (любезно предоставлено: Pbroks13) показана упрощенная схема ракеты на жидком топливе. 1. Жидкое ракетное топливо. 2. Окислитель. 3. Насосы подают топливо и окислитель. 4. Камера сгорания смешивает и сжигает две жидкости. 5. Горячий выхлоп забивается в горловину, что, помимо прочего, определяет величину создаваемой тяги. 6. Выхлоп выходит из ракеты.
Типы ракетных двигателей: –
1. С физическим приводом: Сюда входят водяные ракеты и двигатели на холодном газе, которые используют воду под давлением и инертные газы соответственно для получения желаемой тяги.
2. С химическим приводом: В этом случае тяга получается за счет экзотермической химической реакции между порохами. Различные подтипы включают
Твердотопливные ракеты: содержат одну камеру смеси твердого топлива и окислителя.
Гибридные ракеты: твердое топливо, жидкий окислитель. Отдельные баки.
Монотопливо: Одиночное топливо течет по катализатору и экзотермически разлагается.
Двухкомпонентное топливо: Двухжидкостное топливо объединяется. (То же, что Falcon 9 и принцип ракеты, описанный выше).
Двойной режим: Ракета взлетает как двухтопливная ракета, затем поворачивается, используя только одно топливо.
3. С электроприводом
Реактивная ракета Resistojet: Монотопливо получает энергию за счет нагрева резистивного элемента.
Ракета Arcjet: аналогична предыдущей, за исключением того, что нагревательный элемент заменен электрической дугой.
Импульсная плазма: Плазма используется для воспламенения твердого топлива.
4. Тепловые ракеты: Горячая вода хранится в баках при высокой температуре и давлении, преобразуется в пар и выходит через сопло.
В настоящее время также разрабатываются ядерные ракеты, ядерные тепловые и солнечно-тепловые ракеты, а также проводятся эксперименты в контролируемых условиях.
Ракетный двигатель
А ракетный двигатель не как обычный двигатель. Зажигается обычный двигатель топлива, которое затем давит на некоторые поршни, и он крутит кривошип. Следовательно, он использует энергию вращения для вращения колес. средство передвижения. Электродвигатели также используют энергию вращения для вращения вентиляторов. и вращающиеся диски. Ракетный двигатель не использует энергию вращения для бегать. Это реактивные двигатели. Принцип его в том, что топливо, содержащееся в корпусе ракеты, проходит через химическая реакция, поскольку она выходит из конца ракеты. Этот Затем реакция вызывает тягу и толкает ракету вперед. Этот является примером одного из основных законов сэра Исаака Ньютона. «За на каждое действие есть равное и противоположное противодействие» (Как Ракета Двигатели работают.)
Это представление закона Ньютона. (http://www.howstuffworks.com/rocket.htm/)
Это фотография ракетного двигателя космического корабля «Шаттл» во время тестового запуска. Обратите внимание на голубое пламя горящего топлива. Это вызывает тягу, и толкает ракету в противоположном направлении. (http://www.howstuffworks.com/rocket.htm/)
Прочность ракета измеряется в фунтах тяги. Фунт тяги — это сила, необходимая для удержания объекта весом в один фунт неподвижным относительно гравитация (Как работают ракетные двигатели. ) Чтобы создать это толкать, ракеты сжигают один из двух видов топлива: твердое топливо или жидкое топливо. Из-за этого ракеты часто классифицируют по типу топлива. что они горят.
Твердотопливные ракеты
Твердотопливные ракеты являются первыми ракетами, которые будут зарегистрированы в истории. Они были первыми изобретены в Древнем Китае и с тех пор используются (Как ракета Двигатели Работа.) Химический состав твердого ракетного топлива очень подобен химическому составу пороха. Однако точное химический состав не тот. Чтобы заставить ракету работать, нужно быстро необходимо сжигание неэксклюзивного топлива. Порох взрывается, делая это непригодно. Таким образом, химический состав был изменен, чтобы сделать его быстро горят, но не взрываются. Одна из самых больших проблем с твердый топлива ракетных двигателей заключается в том, что после запуска реакция не может быть остановился или перезапущен. Это делает их неуправляемыми. Поэтому твердотопливные ракеты более широко используются для реактивных снарядов или как ракеты-носители.
Это схема как выглядит твердотопливный ракетный двигатель до и после зажигания. Твердое топливо окрашено в темно-зеленый цвет, а затем в оранжевый по мере воспламенения. запустить ракету. (http://www.howstuffworks.com/rocket.htm)
Ракеты на жидком топливе
Первое жидкотопливное Ракета была произведена Робертом Годдардом в 1926 году (How Rocket Engines Работа.) Идея ракеты на жидком топливе проста для понимания. А топливо и окислитель, в случае Годдарда он использовал бензин и жидкость кислород, закачиваются в камеру сгорания. Реакция занимает место, и он расширяется, толкая ракету вперед. затем расширяющийся газ нагнетается через сопло, которое заставляет их ускорить на более высокую скорость (Как работают ракетные двигатели.
«Заряженный» малыш Mini JCW не получит двигателя внутреннего сгорания?
В рамках своего интервью, вице-президент Mini в США Майк Пейтон сказал о том, что ориентированный на высокую производительность Mini Cooper John Cooper Works (JCW) не нуждается в двигателе внутреннего сгорания, намекая тем самым на то, что шустрая новинка получит полностью электрическую силовую установку.
Господин Пейтон сказал, что есть «потенциал» для полностью электрического JCW, добавив, что наличие традиционного ДВС в современном мире вовсе не обязательно для того, чтобы автомобиль мог похвастать впечатляющими динамическими характеристиками. Однако, установка электрической силовой установки в машинки Mini — это отдельная история. Пейтон отметил, что технология создания аккумуляторных батарей для электромобилей все еще совершенствуется, и он хотел бы видеть дальнейшие улучшения, которые повысят производительность этой системы в целом.
Тем не менее, пока Mini продолжит выпускать плагин-гибридные версии своих двигателей внутреннего сгорания, на ряду с их обычными версиями- без какой-либо электрификации.
Новый Mini Clubman может превратиться во внедорожник
Прямо сейчас, Mini предлагает плагин-гибридное исполнение модели Countryman. Однако к концу следующего года Mini также предложит Mini Cooper SE 2020 года, полностью электрический двухдверный автомобиль с запасом хода в 183 километра. Одним из преимуществ, которые есть у компании Mini, является возможность доступа ко всем наработкам компании BMW, которая является материнской компанией для производителя городских автомобильчиков.
Господин Пйтон отдельно отметил, что аккумуляторная батарея и электродвигатель обеспечивают непревзойденную производительность по сравнению с двигателем внутреннего сгорания. Он также отметил, что полностью электрический Mini Cooper JCW, вероятно, появится через несколько лет. И это может вывести производительность модели на новый уровень.
Не так давно, наше издание писало о том, что MINI начала принимать заказы на электрический Cooper SE.
Удивительно, но в автопромышленности есть определенные двигатели, которые устанавливаются на обычные автомобили серийного производства, объем которых может составлять менее 1 литра бутылки Кока-Колы. Если вы сейчас подумаете, что подобные моторы в наше время редкость, то будете удивлены, на самом деле двигатели с небольшим объемом сегодня широко используются многими автомобильными компаниями производителями. С постоянным ужесточением в мире экологических норм, чтоб уменьшить выбросы в атмосферу парниковых газов большинство автопроизводителей вынуждены уменьшать объем двигателей и количество цилиндров в автомобиле, но при этом пытаются сохранить определенный уровень адекватной мощности авто. Таким образом, если кто-то вам говорит, что уменьшение объема двигателя обязательно приводит к потере его мощности, то они ошибаются. Предлагаем вам ознакомиться с Топ-10 моторов у которых по современным меркам довольно малый объем двигателя, но они как раз и доказывают и опровергают те неподтвержденные слухи, что тренд на уменьшение цилиндров в двигателе идет автомобилю во вред.
Что в итоге
Как видно, если учесть значительную потерю КПД при уменьшении объема бензинового двигателя, а также специфические особенности в виде повышенного расхода топлива и сниженной надежности роторно-поршневого мотора, компактный дизельный двигатель является наиболее перспективным вариантом во всех отношениях.
При этом такие агрегаты будут потреблять уже не литры, а граммы топлива, показатель КПД вполне может оказаться на отметке около 7-10%. Это значит, что такой двигатель в качестве источника энергии окажется более эффективным и намного более долговечным решением по сравнению с различными аккумуляторными батареями, которые могут быть схожи по габаритам.
Дизельный оппозитный двигатель Субару (Subaru Boxer Diesel). Устройство и особенности оппозитного мотора, преимущества и недостатки указанного типа ДВС.
Турбированный трехцилиндровый двигатель Smart 0.9L
Представленный нами здесь Smart Fortwo является одним из самых маленьких автомобилей, который доступен на сегодняшний день для покупки на авторынке. Параметры этой машины таковы: Длина- 2,69 м, Ширина- 1,56 метра. Соответственно получается, что на такую мини-автомашину нет ни какой необходимости устанавливать большой и мощный мотор. Под капотом микроавтомобиля расположился турбированный бензиновый двигатель объемом 0,9 литра и мощностью в 84 л. с. (максимальный крутящий момент 120 Нм). Этого вполне достаточно, чтобы с 0 до 100 км/час автомобиль мог разогнаться за 10,7 секунд. Понятно всем, что автомобиль Smart Fortwo проиграет на автодороге любые гонки, но главное его преимущество в экономии топлива, в смешанном цикле автомобиль потребляет всего 4,9 л на 100 км пути.
Что спасет дизель от вымирания?
Европейские страны одна за другой анонсируют полный запрет двигателей внутреннего сгорания. Ехать в такой атмосфере на день технических новинок грустно, но у компании Bosch нашлось чем удивить.
Еще пару лет назад о запрете бензиновых и дизельных двигателей никто и не помышлял, но после дизельгейта экологи расправили крылья, и производители уловили новый тренд. Например, фирма Volvo заявила о нерентабельности разработки новых дизелей.
А вот в компании Bosch уверены, что дизели хоронить рано! Дальнейшая оптимизация систем питания и очистки отработавших газов позволит уложиться в перспективные экологические нормы. Плюс электрификация: большие перспективы имеют «мягкие» гибриды с дополнительной бортовой сетью напряжением 48 В — например, такая система установлена на новом Audi A8. Оптимизм, с каким инженеры говорили о дальнейшем развитии турбодизелей, внушает уверенность, что радикальные заявления политиков и экологов пока останутся нереализованными.
Обеспокоенность компании Bosch понятна — это один из крупнейших производителей автокомпонентов, а резкий отказ от дизелей или ДВС, в целом, потребует перестройки бизнеса и больших инвестиций. Поэтому немцы намерены всеми силами отстаивать существующий порядок вещей и предлагают варианты его оптимизации.
Трехцилиндровый двигатель Ford 1.0L EcoBoost
Прошло уже несколько лет после того, как компания Форд представила свой первый турбированный трехцилиндровый двигатель. Уже сегодня в наше время этот силовой агрегат можно увидеть на многих автомобилях Американской марки. Мощность такого мотора составляет 100 л.с. (в зависимости от модели машины), крутящий момент его турбодвигателя равен 170 Нм. Благодаря своему небольшому объему трехцилиндрового двигателя а также системы Старт-стоп, двигатель авто в смешанном цикле потребляет всего 4,6 литра на 100 км.
Трехцилиндровый двигатель Mitsubishi 1.2L
Этот 1,2 литровый мотор мощностью в 78 л.с. устанавливается на автомобиль Mitsubishi Mirage, что позволяет ей расходовать в смешанном режиме около 5,2 литров на 100 км пути.
Такой расход топлива можно сравнивать с расходом горючего определенными гибридными автомобилями. Мощность у машины — менее 100 л.с., а максимальный крутящий момент составляет 100 Нм.
Четырехцилиндровый двигатель Fiat Chrysler 1.4L Turbo MultiAir
Этот четырехцилиндровый 1,4-литровый силовой агрегат используется на многих моделях марки Фиат, включая и модель «500». Турбомотор имеет мощность 135 л.с. Размеры этого двигателя позволили инженерам компании установить его в компактный авто Фиат 500. Также, благодаря своим техническим характеристикам данный двигатель делает этот небольшой автомобиль достаточно высокопроизводительным. Расход топлива в смешанном цикле тоже вполне адекватный — 7,8 литров на 100 км.
Ремонт дизельных моторов Фольксваген
Немецкая компания использует для своих малолитражек несколько дизельных двигателей: 1,2, 1,4, 1,6 и 1,9 TDI. Их же можно встретить на Шкода Фабиа. Самый экономичный в линейке – 1,2 TDI: австрийский гонщик установил рекорд на Фабиа с таким мотором, проехав на одном баке порядка 2000 км, итоговый расход – 2,21 л на сотню.
Так чего ждать от дизельного 75-сильного мотора на 1,2 л? Он комплектуется сажевым фильтром, который из-за низкого качества нашего топлива, быстро забивается. Если самоочистка не срабатывает, включается аварийный режим – двигатель не развивает более 2000 оборотов в минуту. Приходится ехать в техцентр для замены или полного удаления фильтра. Если вы решитесь на удаление сажевого фильтра, нормы токсичности ухудшатся.
Общий ресурс 1,2 TDI зависит от стандартных параметров: качество топлива и масла, периодичность ТО, нагрузки. При правильной обкатке, эксплуатации и обслуживании мотор ходит 200 тысяч и даже больше. Перед каждой поездкой, особенно при минусовых температурах, желательно прогревать машину в течение 5–10 минут.
Перейдем к старшему «собрату» – 1,4 TDI. Это трехцилиндровый агрегат, и этим все сказано. Силы инерции не уравновешивают друг друга, из-за чего возникают вибрации. Где-то к 200–250 тыс. км появляются эксплуатационные дисбалансы. Из-за сильной вибронагруженности может выйти из строя коленчатый вал. Неприятные сюрпризы часто преподносят турбокомпрессор и клапан EGR. Дизельный двигатель Фольксваген чувствителен к качеству масла, поэтому нужно строго придерживаться заводского регламента.
Среди популярных дизельных малолитражек Фольксваген почетное место отводится Гольфу. В период с 2003-го по 2007-й модель комплектовалась двухлитровым турбированным дизелем с огромным списком слабых мест: ГБЦ, маслонасос, двухмассовый маховик, привод ГРМ.
Как показывает практика, компактные дизельные моторы Фольксваген требуют частой замены масла, которое быстро «стареет» из-за малого объема масляной системы, наличия парафина, примесей, смол в топливе. При солидном пробеге наблюдается повышенная дымность, что свидетельствует о неполном сгорании топлива.
Чтобы очистить камеру сгорания и газоотводящий тракт от сажи, рекомендуем использовать каталитическую добавку FuelEXx. Она увеличит скорость горения, что приводит к повышению температуры и процессу окисления. В итоге повысится КПД двигателя и нормализуется расход топлива. А благодаря повышению цетанового показателя, топливной аппаратуре станет легче «переваривать» отечественное топливо.
Присадке FuelEXx не под силу устранить износ с поверхностей трения, снизить шумность и нормализовать компрессию. Для этого используются методики безразборного ремонта – геомодификатор трения RVS-Master. Он восстанавливает и модифицирует рабочие поверхности. Прочность новообразованного слоя в 2 раза выше, чем у гальванопокрытий хромом.
Четырехцилиндровый двигатель General Motors 1.4L Turbo Ecotec
Компания General Motors вывела на рынок свой новый 1,4-литровый турбированный двигатель с четырьмя цилиндрами. Например, этот мотор также устанавливается и на новую модель 2021 года Chevrolet Cruze. Мощность этого двигателя составляет 153 л.с. Средний расход топлива заявленный производителем составляет 6,7 литров на 100 км, что делает такой автомобиль согласитесь с нами, просто потрясающим.
Четырехцилиндровый двигатель General Motors 1.4L Ecotec без турбины
Для тех, кто не очень любит турбированные моторы компания GM создала аналогичный четырехцилиндровый двигатель, но уже без турбины, объем которого соответственно равен 1,4 литра, а мощность составляет 98 л.с. Например, данный силовой агрегат устанавливается на автомобиль Chevrolet Spark с мощность мотора в 98 л.с. (128 Нм).
Самый маленький дизельный двигатель как источник энергии
Если говорить о полноценном цилиндро-поршневом механизме, то на сегодняшний день самые небольшие размеры имеет детище инженера Йесуса Уайлдера. Это 12-цилиндровый двигатель V-образного типа, полностью соответствующий ДВС Ferrari и Lamborghini. Однако на деле механизм является бесполезной безделушкой, поскольку работает не на жидком топливе, а на сжатом воздухе, и при рабочем объеме в 12 кубических сантиметров имеет очень низкий КПД.
Другое дело – самый маленький дизельный двигатель, разработанный учеными Великобритании. Правда, в качестве горючего для него требуется не солярка, а особая самовозгорающаяся при увеличении давления смесь метанола с водородом. При тактовом движении поршня в камере сгорания, объем которой не превышает одного кубического миллиметра, возникает вспышка, приводящая механизм в действие. Что любопытно, микроскопических размеров удалось добиться путем установки плоских деталей, в частности, те же поршни являются ультратонкими пластинами. Уже сегодня в ДВС с габаритами 5х15х3 миллиметра крошечный вал вращается со скоростью 50.000 об/мин, вследствие чего производит мощность порядка 11,2 Ватта.
Пока перед учеными стоит ряд проблем, которые необходимо решить перед тем, как выпускать дизельные мини-двигатели на поточное производство. В частности, это колоссальные теплопотери из-за чрезвычайно тонких стенок камеры сгорания и недолговечность материалов при воздействии высоких температур. Однако, когда все-таки крошечные ДВС сойдут с конвейера, всего нескольких граммов топлива хватит, чтобы заставить механизм при КПД в 10 % работать в 20 раз дольше и эффективнее аккумуляторов таких же размеров.
Четырехцилиндровый двигатель Volkswagen 1.4L турбо
В конце прошлого года компания Volkswagen представила на обозрение свой 1,4-литровый турбо двигатель с четырьмя цилиндрами. Кодовое обозначение мотора- EA211. Этот двигатель был специально создан для модели авто VW Jetta. Его мощность составляет 150 л.с., а максимальный крутящий момент равен 240 Нм. В смешанном режиме автомобиль с таким силовым агрегатом потребляет всего 6 литров на 100 километров пути.
Трехцилиндровый турбо двигатель MINI 1.5L
Этот мотор попал в 2015 году в Топ-10 самых лучших двигателей мира, по версии WardsAuto. Этот 1,5- литровый двигатель Mini создан по технологии TwinPower Turbo, которая используется компанией БМВ при созданиина своих моторов. Мощность такого трехцилиндрового мотора Mini составляет 136 л.с., а максимальный крутящий момент равен 220 Нм. Расход топлива в комбинированном режиме составляет 5,3 литров на 100 км пути.
Четырехцилиндровый турбо двигатель Honda 1.5L
Наконец-то компания Хонда представила свой турбированный 1,5-литровый двигатель, который в дальнейшем будет устанавливаться на новую модель 2021 Honda Civic. Есть много шансов, что этот силовой агрегат станет на мировом рынке самым популярным из всех представленных двигателей. Турбированный двигатель авто Хонда имеет мощность 174 л.с., его максимальный крутящий момент составляет 220 Нм. В смешанном цикле с вариатором расход топлива у мотора составляет 6,7 литров на 100 км. С механической коробкой передач этот расход топлива существенно будет ниже.
Что спасет дизель от вымирания?
Европейские страны одна за другой анонсируют полный запрет двигателей внутреннего сгорания. Ехать в такой атмосфере на день технических новинок грустно, но у компании Bosch нашлось чем удивить.
Еще пару лет назад о запрете бензиновых и дизельных двигателей никто и не помышлял, но после дизельгейта экологи расправили крылья, и производители уловили новый тренд. Например, фирма Volvo заявила о нерентабельности разработки новых дизелей.
А вот в компании Bosch уверены, что дизели хоронить рано! Дальнейшая оптимизация систем питания и очистки отработавших газов позволит уложиться в перспективные экологические нормы. Плюс электрификация: большие перспективы имеют «мягкие» гибриды с дополнительной бортовой сетью напряжением 48 В — например, такая система установлена на новом Audi A8. Оптимизм, с каким инженеры говорили о дальнейшем развитии турбодизелей, внушает уверенность, что радикальные заявления политиков и экологов пока останутся нереализованными.
Обеспокоенность компании Bosch понятна — это один из крупнейших производителей автокомпонентов, а резкий отказ от дизелей или ДВС, в целом, потребует перестройки бизнеса и больших инвестиций. Поэтому немцы намерены всеми силами отстаивать существующий порядок вещей и предлагают варианты его оптимизации.
Четырехцилиндровый двигатель Toyota 1.5L
Этот 1,5-литровый четырехцилиндровый мотор в отличие от двигателя на авто Хонда, не оснащен турбиной. Мощность этого двигателя составляет 106 л.с., а максимальный крутящий момент составляет всего 139 Нм. Но этого вполне достаточно и хватает, так как этот силовой агрегат преимущественно устанавливается на автомобиль Toyota Yaris. Расход топлива- 7,1 литров на 100 км.
Кстате, двигатели автомобилей Хонда и Тойота очень похожи друг с другом по своей конструкции. Единственное и значительное отличие у машин между собой, это наличие в моторе Хонда турбокомпрессора. При сравнивании мощности двух Японских двигателей можно заметить и отметить пользу турбины, которая автомобилю Хонда дает существенное преимущество.
Маленький дизель: 1,3-литровый CDTi от Opel (Z13DT), он же Multijet
1.3 MultiJet – это один из самых маленьких автомобильных дизельных моторов в мире. Он разработан инженерами General Motors совместно с коллегами из Fiat. Выпускается с 2003 года. Диапазон мощности – от 75 до 105 л.с.
Рабочий объем менее 1,3 литра, распределенный по четырем цилиндрам, требует очень точного управления впрыском топлива. Для этого дозы топлива в каждом цилиндре делят на более мелкие части. В первых экземплярах они делились на 5 частей, а начиная с 2009 года (после модернизации) – на 8. Это позволило смягчить работу двигателя и снизить количество вредных выбросов в выхлопных газах.
Базовый дизельный двигатель концернов Fiat и Opel собирался в Польском Бельско-Бяла. Это первый агрегат, выпуск которого был налажен на совместном предприятии Fiat-GM Powertrain в Польше. Сегодня сотрудничество между двумя компаниями уже не столь близкое, но производство двигателей продолжается.
Большинство модификаций мотора оснащены турбокомпрессором с фиксированной геометрией, самые мощные – турбонагнетателем с изменяемой геометрией. Дизельные двигатели рабочим объемом 1,3 литра достались широкому кругу автомобилей – от городских до микровэнов. Так как силовой агрегат выступал под эмблемой различных автомобильных марок, то в каждом случае он получал свое название. В основном это MultiJet и CDTI, а также JTDM, DDiS, TDCi.
Типичные проблемы
Учитывая довольно сложную конструкцию и зачастую довольно грубую эксплуатацию (двигатель, как правило, использовался в служебных автомобилях и небольших фургонах), надежность моторов следует оценивать высоко. Радует также небольшой расход топлива. Городские автомобили в реальных условиях порой потребляют лишь немногим более 4 л/100 км.
Двигатели 1.3 Multijet / CDTI при больших пробегах склонны к повышенному расходу масла и падению компрессии, главным образом, при использовании в крупных и тяжелых моделях. Особенно смертелен большой интервал замены для масла класса long-life. Опель определил для этого совершенно сумасшедшие 50.000 км, в то время как Фиат ограничился «всего» 30.000 км. Но и это слишком много для миниатюрного дизеля, с 3-литровым запасом смазки. К тому же при больших нагрузках увеличивается расход масла на угар. Необходимо часто контролировать уровень масла, потому что его дефицит может привести к перескоку цепи привода распределительного вала.
Натяжитель цепи ГРМ
Двигатель очень чувствителен даже к небольшому снижению уровня моторного масла. При частых перемещениях в городских условиях сильно падает уровень масла. Если этого вовремя не заметить, то начинает снижаться и давление в системе, а, следовательно, и натяжение цепи. Недостаток масла приводит к неправильной работе натяжителя цепи. Цепь может перепрыгнуть. По той же причине не стоит экономить, покупая дешевое низкокачественное масло или оттягивая срок его замены. Последствия окажутся слишком болезненными и дорогими в устранении. Натяжитель цепи в моторе 1,3 CDTI/Multijet следует переодически проверять на работоспособности и при необходимости менять на новый. Как правило, он не служит более 70.000 км. Кроме того в моторах 1,3 Multijet зафиксированы проблемы с цепным приводом ГРМ и даже разрыв цепи, что всегда заканчивалось смертельным уроном.
Цепь ГРМ
О надежности цепи ГРМ мотора 1,3 CDTI/Multijet много противоречивой информации. Кто-то называет эту цепь «велосипедной», указывая на ее непрочность и склонность к растяжению. Кто-то сообщает, что эта цепь без растяжения способна пережить несколько изношенных натяжителей.
Утечки из-под термостата
Небольшая, но незамеченная вовремя утечка охлаждающей жидкости может привести к перегреву двигателя. Необходимо регулярно контролировать уровень антифриза в бачке.
Ускоренный износ сцепления
Слишком частое агрессивное вождение и неаккуратная работа со сцеплением быстро его изнашивают.
Увеличение уровня масла
Владельцы автомобилей с мотором 1,3 CDTI/Multijet могут обнаружить, что уровень масла в картере увеличился. Такое «чудо» происходит из-за разбавления масла дизтопливом, которое в обильном количестве подается в камеры сгорания во время процедуры прожига сажевого фильтра. Этот фильтр забивается при кратковременных городских поездках. Процедура прожига запускается на холостых оборотах: момент прожига можно определить по выхлопу и оборотах на холостых. То есть, при прожиге из выхлопной трубы идет дымок с характерным запахом пластика и обороты поднимаются до 1000. Обязательно нужно дождаться окончания прожига и потом глушить двигатель. Если раньше заглушить, то топливо попадет в поддон и разбавит моторное масло. Вообще, после нескольких удачных прожигов сажевого фильтра рекомендуется внепланово менять моторное масло. Чтобы достичь естественной и более щадящей очистки сажевого фильтра, следует «выгуливать» мотор 1,3 CDTI/Multijet в трассовых режимах, проезжая хотя бы по 50 км с постоянной высокой скоростью.
Сажевый фильтр
При частых кратковременных поездках сажевый фильтр мотора 1,3 CDTI/Multijet забивается. При этом электроника двигателя способна учитывать степень засоренности этого фильтра и при необходимости запускает его прожиг. Выглядит это следующим образом. При остановке и работе на холостых оборотах автоматически включаются все электрические потребители, в том числе обогрев заднего стекла, свечи преднакала. Из-за этого возрастает нагрузка на двигатель, как следствие — повышается температура двигателя. Включается послевпрыск. За счет этого повышается температура выхлопных газов – фильтр прожигается. Но не всегда эта процедура оказывается действенной. И тогда проявляются следующие симптомы: снижается разгонная динамика, вырастает расход топлива, появляется едкий запах несгоревшего дизтоплива.
Клапан ЕГР и проблема с запуском
Часто владельцы автомобилей с мотором 1,3 CDTI/Multijet сталкиваются со следующим симптомом: двигатель запускается и через несколько секунд глохнет. При этом компьютерная диагностика не показывает никаких ошибок, которые могли бы четко указывать на проблему. В этом случае следует снять клапан EGR и очистить его. На этом моторе электрическая (управляющая) и механическая часть клапана EGR выполнены раздельно. Находящийся в грязных условиях работы клапан EGR просто заклинивает в одном положении: его направляющая втулка загрязняется нагаром и сажей, клапан перестает работать. В этом случае электрическая часть системы EGR проблемы не видит, но фиксирует некорректные параметры работы, из-за чего двигатель останавливается.
Частичное подклинивание клапана EGR на моторе 1,3 CDTI/Multijet может вызвать ошибку по работе турбины, хотя истинная причина кроется не в ней. Клапан EGR регулирует количество отработавших газов, возвращаемых во впускной коллектор. И если клапан будет открыт, то при определенных оборотах топливо-воздушная смесь окажется неправильного состава и выход отработавших газов будет нерасчетным. В итоге электроника фиксирует ошибку по низкой производительности турбины.
В некоторых моторах 1,3 CDTI/Multijet встречались такие неисправности, как разрушение лопаток турбокомпрессора и перемерзание канала вентиляции картера (как правило, после серии коротких поездок в зимний период).
В целом несмотря на небольшой рабочий объем мотор 1,3 CDTI/Multijet можно назвать живучим и неприхотливым. Он способен пройти до 400.000 км без явного износа поршневой. Но таких результатов можно достичь при правильной эксплуатации. Важно следить за уровнем и качеством моторного масла, чистить впускной коллектор и давать мотору «проветриться» в трассовом режиме.
Двигатель для своего авто вы сможете подобрать на нашем сайте.
Пять смехотворно крошечных двигателей, которые действительно работают
Когда вы думаете о двигателе, вы, вероятно, думаете о мощности. И когда вы думаете о власти, вы, вероятно, мыслите масштабно.
В некоторых случаях это хорошо, но подумайте о крошечном двигателе. Он выполняет все те же трюки, но с крайне ограниченным пространством, что требует совершенно другого инженерного мастерства. Маленькие двигатели могут быть не такими практичными, как их старшие братья, но они почти всегда веселее.
Крошечный двигатель V8
Алексей Жолнер отлично делает модели двигателей. Здесь он иллюстрирует крошечный бумажный дроссель, с помощью которого он может разогнать свой мини-V8 до ужасающе тихого урчания. Он работает на сжатом воздухе, в отличие от любой формы горения, но это не делает его менее впечатляющим.
Маленькие пароходные двигатели
Лесли Пропер увлекается моделями пароходов. У него есть видео, где он позволяет им отправиться в плавание, рассекая воду, как пароходы обычного размера, которые мы все знаем и любим. Здесь он демонстрирует то, что заставляет их работать: шесть крошечных функциональных двигателей. Особенно впечатляет одноцилиндровый двигатель двойного действия.
Крошечный двигатель V6
Иногда лучший способ сделать двигатель крошечным — это изменить принцип его работы. Difo Productions, итальянский ютубер, воссоздал двигатель V6, но решил обойти традиционные взрывы. Работа с паром вместо топлива дает Difo больше гибкости, например, использование алюминия для цилиндров, картера, поршней и латунных трубок для воздуховодов. На строительство ушло семь месяцев, но миниатюрные результаты говорят сами за себя.
Двигатели внутреннего сгорания Рональда Валентайна
Рональд Валентайн утверждает, что делает самые маленькие двигатели внутреннего сгорания, и в этом трудно сомневаться. Самое близкое видео с его товарами — это случайная встреча с самим человеком, демонстрирующим свои товары. Сайт Валентина выглядит так, как будто принимает индивидуальные заказы, поэтому вы можете найти свою любимую машину и начать воссоздавать ее.
Крошечный роторный двигатель
Что делает крошечные паровозики Алексея Жолнера такими особенными, так это то, что они сделаны из бумаги, из-за чего их невозможно сделать, но в то же время странно достижимо. В конце концов, у вас завалялась бумага, не так ли?
Хотя этот тип беспоршневых двигателей уже почти не используется, воссоздание Жолнера делает их доступными. У вас может не быть всех инструментов, необходимых для создания собственного двигателя, но у вас, вероятно, есть доступ к некоторой бумаге. Получите складывание!
Дэвид Гроссман Дэвид Гроссман — штатный автор PopularMechanics.com.
Mini выпустит свой последний двигатель внутреннего сгорания в 2025 году
Автомобиль >
3 ноября 2021 г. , 11:42
Mini выпустит свой последний двигатель внутреннего сгорания в 2025 году
BEVBMWCountrymanMiniPHEV
Марка BMW Mini представила свою стратегию на будущее. Это подтверждает ранее объявленную цель BMW Group иметь исключительно электрические модели в линейке Mini к началу 2030-х годов. Теперь Mini подробно описывает, как она собирается достичь этой цели.
Mini также подтверждает заявление о том, что в 2025 году на рынок будет выпущена последняя новая модель Mini с приводом от двигателя внутреннего сгорания. В 2023 году Mini представит первую модель нового поколения электромобилей. Скорее всего, это будет Mini Countryman, который уже анонсирован на 2023 год, но об этой модели чуть позже.
Как и в случае с Audi, нет конкретного целевого года, когда будет построен последний двигатель внутреннего сгорания, но это будет модель, которая будет запущена в 2025 году. Исходя из обычного производственного цикла в семь-восемь лет, Mini должен стать чистый бренд EV в 2032/2033 годах, хотя нормальный цикл продукта в этом случае на самом деле является лишь предположением. Тем не менее, цель BMW сделать Mini электрическим к началу 2030-х годов может быть достигнута таким образом.
Будущее основное портфолио аккумуляторных электромобилей будет включать трехдверный Mini, а также по одной модели кроссовера в сегментах малолитражных автомобилей и компактных автомобилей премиум-класса. Две модели, разработанные с самого начала для чисто электрической мобильности, будут производиться в Китае. Mini пока не уточнила, какие это будут модели. Но намерение ясно: с местным производством в Китае бренд хочет иметь возможность «более активно, чем раньше, участвовать в динамичном росте китайского автомобильного рынка».
В Европе преемник нынешнего Mini Countryman будет производиться на заводе BMW в Лейпциге с 2023 года как с «электрифицированным приводом, так и с двигателями внутреннего сгорания». Компании любят использовать фразу с электрифицированными приводами для описания гибрида или подключаемого гибрида. Однако в случае с Countryman BMW уже подтвердила, что следующее поколение модели также будет оснащено аккумуляторно-электрическим приводом. В частности, Mini Countryman будет сдвинут ближе к BMW X1, также построенному в Лейпциге, который также получит полностью электрическую версию iX1.
В дополнение к усилению электрификации бренд BMW хочет сократить выбросы CO2 в расчете на одно транспортное средство в течение всего жизненного цикла продукта в качестве «явной приверженности устойчивому развитию». Согласно заявлению, это включает в себя цели для цепочки поставок (-20% CO2 к 2030 г.), исключительное использование экологически чистой электроэнергии в производстве (к 2030 г. производство должно сократить выбросы CO2 на 80%), а также «неуклонно растущая доля натуральных и переработанных материалов в транспортных средствах».
«Mini всегда был ответом на особые вызовы индивидуальной мобильности. И готовность переосмыслить статус-кво определяет бренд по сей день», — говорит генеральный директор бренда Бернд Кёрбер. «Помимо электромобильности, развитие новых целевых групп и рынков сбыта является ключевым фактором для будущего Mini».
bmwgroup.com
— РЕКЛАМА —
Предыдущая статья
Следующая статья
Нам необходимо ваше согласие, прежде чем вы сможете продолжить работу на нашем веб-сайте. Если вам еще не исполнилось 16 лет, и вы хотите дать согласие на дополнительные услуги, вы должны спросить разрешения у своих законных опекунов. Мы используем файлы cookie и другие технологии на нашем веб-сайте. Некоторые из них необходимы, в то время как другие помогают нам улучшить этот веб-сайт и ваш опыт. Персональные данные (например, IP-адреса) могут обрабатываться, например, для персонализированной рекламы и контента или измерения рекламы и контента.
Газотурбинные двигатели PBS, специально спроектированные для использования на беспилотных летательных аппаратах (UAV), учебных мишенях а также легких пилотируемых летательных аппаратах и вертолетах.
Брошюра для скачивания
PBS.TopImage.Btn.Scroll
Авиационные двигатели
Реактивный двигатель PBS TJ150
Максимальная мощность:1 500 N
Вес: 18,9 kg
Реактивный двигатель PBS TJ100
Максимальная сила тяги: 1 250 Н
Вес: 19,5 кг
Реактивный двигатель PBS TJ100P
Максимальная тяга: 1 250 Н
Вес 17,6 кг
Реактивный двигатель PBS TJ80-90
Максимальная сила тяги: 900 Н
Вес: 12,5 кг
Реактивный двигатель PBS TJ40-G1
Максимальная сила тяги: 395 Н
Вес: 3,4 кг
Реактивный двигатель PBS TJ40-G1NS
Максимальная тяга:425 Н
Вес: 3,6 кг
Реактивный двигатель PBS TJ40-G2
Максимальная сила тяги: 395 Н
Вес: 3,8 кг
Турбовальный двигатель PBS TS100
Максимальная мощность: 180 кВт
Вес: 62 кг
Турбовинтовой двигатель PBS TP100
Максимальная мощность: 180 кВт
Вес : 62 кг
Bозможность использования авиационных двигателей
Легкие реактивные самолеты
Воздушно-реактивные двигатели также устанавливаются на пилотируемые летательные аппараты. Американский самолет «SubSonex» – один из самых успешных примеров использования наших двигателей.
Легкие частные самолеты
Турбовинтовой двигатель TP100 устанавливается на нескольких пилотируемых летательных аппаратах в категории «experimental». Благодаря стабильной мощности на большой высоте и в экстремальных климатических условиях он может также устанавливаться на беспилотные летательные аппараты с пропеллером.
Легкие вертолеты до 1000 кг
Турбовальный двигатель TS100 устанавливается прежде всего на сверхлегкие вертолеты. Малый вес, минимальная вибрация, тихий ход, стабильная мощность на большой высоте над уровнем моря и в экстремальных климатических условиях – все это позволяет использовать его для пилотируемых и беспилотных летательных аппаратов в качестве замены поршневых двигателей, прежде всего в сложных климатических условиях.
Сервисное обслуживание, запчасти и капитальный ремонт
авиационной техники
Для всех пользователей нашей продукции авиационной техники на протяжении всего срока эксплуатации мы предоставляем сервисное обслуживание самого высокого качества.
На протяжении длительного времени мы работаем над продлением срока службы наших продуктов, например, путем внедрения новых технологий при производстве наиболее экспонируемых деталей. Наше авиационное оборудование на базе турбин регулярно получает очень хорошие рекомендации.
Более подробная информация
На каких двигателях полетят новые российские самолеты
Но начался разговор с одной из самых горячих тем последних дней: столкновение самолета А321 с птицами и экстренная посадка с неработающими двигателями на кукурузное поле.
Михаил Валерьевич, как вы прокомментируете случившееся?
Михаил Гордин: Безусловно, мы следим за ситуацией, насколько это возможно. Хотя, конечно, комментарии до объявления официальных результатов считаю преждевременными. В комиссию по расследованию таких летных происшествий специалисты ЦИАМ обычно не входят. Когда будут результаты, мы обязательно с ними будем ознакомлены для использования в дальнейшей работе.
Испытания любого авиационного двигателя на птицестойкость — сертификационное требование
Испытания любого авиационного двигателя на птицестойкость — сертификационное требование. По современным правилам, все двухдвигательные самолеты могут спокойно продолжать полет с одним двигателем. Но что при этом опасно? Что при разрушении двигатель повредит летательный аппарат. К катастрофе могут привести вылет за пределы двигателя не локализованных в его корпусе фрагментов или возгорание. Опасен также обрыв двигателя из-за разрушения его крепления к самолету, недопустимое загрязнение идущего в кабину воздуха. Поэтому при попадании в двигатель крупной одиночной птицы он должен быть безопасно выключен.
Особая опасность — стайные птицы. Они могут попасть одновременно в несколько двигателей, которые при этом должны сохранить необходимую тягу. Поэтому нормы летной годности предусматривают испытания двигателя при попадании в него как одиночной крупной птицы, так и стайных птиц разных размеров.
У неспециалистов возник еще вопрос: почему двигатель нельзя защитить от птиц чем-то вроде сетки?
Михаил Гордин: Конструкция двигателя должна обеспечить его птицестойкость в соответствии с требованиями, а как это обеспечивается — другой вопрос. Сетку поставить, конечно, можно. Но тогда снизится мощность двигателя, ведь он пропускает через себя огромный объем воздуха. Любой фильтр — это преграда, а, значит, потери. Кроме того, разрушение сетки также может привести к повреждению деталей проточного тракта двигателя.
Испытание на прочность
Если продолжить разговор об испытаниях: вы испытываете на конструкционную прочность материалы, из которых делается двигатель ПД-14 для нашего новейшего МС-21. Какие экстремальные условия задаете?
Михаил Гордин: По максимуму. К примеру, рабочая температура никелевых суперсплавов может быть +1100°C и выше. Материал растягивают, сжимают и много чего с ним делают, пока образец не сломается. Проводятся кратковременные и длительные испытания, изучают образование и развитие трещин. Ломается все. Вопрос: как быстро и при каких нагрузках?
Двигатель — самое наукоемкое механическое устройство по плотности инноваций и высоких технологий на кубический сантиметр
Ответ важен еще и потому, что новые материалы, прошедшие квалификационные испытания при сертификации ПД-14, будут применяться и в других изделиях. За создание самих новых материалов отвечает Всероссийский институт авиационных материалов (ВИАМ). Мы же занимаемся испытаниями образцов и конструктивно-подобных элементов для того, чтобы подтвердить характеристики материалов уже в готовых изделиях, а также «вооружить» конструкторов нормами прочности, которые они смогут использовать в будущих конструкциях.
Какие вообще новые материалы используются для перспективных российских двигателей?
Михаил Гордин: Для вала двигателя — высокопрочная сталь, которая может выдерживать высокие нагрузки. Для горячей части — лопаток, дисков — новые никелевые жаропрочные сплавы, теплозащитные покрытия. Для относительно холодных деталей компрессора, корпуса и т.д. — различные титановые сплавы. Применение новых материалов стало одним из условий создания перспективных двигателей. Все конструирование в авиации — это борьба с весом. Наша задача в том, чтобы самолет нес максимально полезную нагрузку. Поэтому мы максимально должны облегчить двигатель.
У стенда для испытаний двигателя-демонстратора перспективных электрических технологий. Фото: Александр Корольков/РГ
А насколько вес двигателя помогают снизить композиты?
Михаил Гордин: Это зависит от размерности двигателя. Для больших — до полутонны. Возьмем, к примеру, углепластиковую лопатку вентилятора. Она на 40% легче применяемой в настоящее время пустотелой титановой, по прочности — такая же. На углепластиковой лопатке используется передняя кромка из титана, которая помогает выдерживать ударные нагрузки. Углепластик и металл вместе — достаточно сложная конструкция, для создания которой необходим большой объем знаний. Но цель та же — снижение веса.
Все подобные научно-технические новации уже используется при создании двигателя?
Михаил Гордин: Конечно. Сейчас реализуется программа создания двигателя ПД-35. В ней определены 18 критических технологий, и одна из них — полимеркомпозитная лопатка вентилятора. Мы вместе с АО «ОДК-Авиадвигатель», головной организацией по разработке ПД-35, и ПАО «ОДК-Сатурн» активно работаем над этой технологией. У нас изготавливаются пока лопатки в размерности ПД-14. Потом мы будем проводить с ними различные испытания, чтобы выбрать конструктивно-технологическое решение для ПД-35.
ПД-14 делают конкретно под самолет МС-21?
Михаил Гордин: Этот двигатель делается под ближнесреднемагистральные самолеты — класс тяги примерно 14-15 тонн. МС-21 сейчас проходит летные испытания с американским двигателем. Но со следующего года на него начнут устанавливать отечественные ПД-14. Это первый с 1992 года (после ПС-90А) полностью российский турбовентиляторный двигатель для гражданской авиации.
Скажите, а сверхтяжелый двигатель ПД-35 для каких самолетов создается?
Михаил Гордин: Работы по программе перспективного двигателя большой тяги ПД-35 — это прежде всего наработка компетенций в новом для России сегменте гражданских реактивных двигателей большой тяги — от 24 до 50 тонн. До сертификации еще далеко, пока все на этапе научно-исследовательских работ. Мы в этой программе соисполнитель, головной исполнитель — АО «ОДК-Авиадвигатель». Разрабатывается демонстратор газогенератора и полимеркомпозитная вентиляторная лопатка. Потом будет двигатель-демонстратор размерностью примерно 35 тонн тяги. На основании этой работы уже можно будет заложить опытно-конструкторскую разработку для двигателя до 50 тонн. 35 тонн — это двигатель примерно для самолета типа Боинг-777.
Для широкофюзеляжного дальнемагистрального самолета он подойдет?
Михаил Гордин: Двигатель большой тяги позволит уйти от четырехмоторной схемы на самолетах Ил-476, Ил-478, Ил-96-400, а также может стать базовым двигателем для перспективного авиационного комплекса военно-транспортной авиации.
В небо — с умом
Эксперты убеждены: электрический самолет будет революционным скачком в самолетостроении. А если говорить о моторах — какой?
Михаил Гордин: Да, электрификация самолетов — это наиболее значительное новшество в авиации после внедрения реактивного двигателя. Мы отказываемся от гидравлики и пневматики и разрабатываем ключевые технологии, которые будут положены в основу создания отечественного самолета с гибридно-электрической силовой установкой.
Например, в электрическом двигателе, входящем в состав гибридно-электрической силовой установки, может применяться эффект высокотемпературной сверхпроводимости. Его основа — проводники, охлаждаемые жидким азотом, который при очень низкой температуре (-196°C) обладает эффектом практически нулевого сопротивления. В результате достигается высокий коэффициент полезного действия и существенно уменьшаются массогабаритные характеристики двигателя.
В теории схема гибридно-электрической силовой установки дает прирост в топливной и экологической эффективности, но это нужно подтвердить на практике.
Насколько я знаю, в мире почти никто не имеет реальных работ в этом направлении?
Михаил Гордин: Завершенных — нет. Но работы по освоению электрических технологий для авиации ведутся в разных странах. Для самолето- и двигателестроения это совершенно новая история, абсолютно передовая. И здесь Россия в тренде. На первом этапе у нас — создание уникальной гибридно-электрической силовой установки мощностью 500 кВт (679 л.с.) с использованием сверхпроводников. На следующих этапах появится сверхпроводящий генератор. По планам, в 2019-2021 годах мы испытаем электродвигатель, в 2022-м — генератор.
Что потом? Думаю, первый полностью электрический самолет с гибридно-электрической силовой установкой на 180 пассажиров полетит не ранее 2050 года. В среднесрочной перспективе возможно создание серийной электрической силовой установки для самолетов на 2-4 пассажира и гибридной — на 9-19 пассажиров. Сейчас мы спроектировали, изготовили и проводим испытания электродвигателя. При мощности 60 кВт (80 л.с.) он весит немногим более 20 кг.
У вас много перспективных разработок. А что за «умный» двигатель? Действительно ли можно научить мотор выполнять команды по заданной математической модели?
Михаил Гордин: По крайней мере мы пытаемся. В любой технике, в том числе и в двигателе, со временем что-то изнашивается. Это неизбежный процесс. Но имея определенную математическую модель и способы измерения, можно подстраивать алгоритмы управления двигателем под его текущее состояние. Это интеллектуальная система управления.
30-е годы. Испытание на открытом стенде первого советского поршневого двигателя М-34 с водяным охлаждением. Фото: Предоставлено «ЦИАМ им. П.И. Баранова»
Проект по интеллектуализации двигателя очень важный и интересный. Он хорошо ложится в концепцию «более» электрического и полностью электрического летательного аппарата. Пока все на стадии демонстратора. Это именно исследовательская работа, создание научно-технического задела, новых знаний и технологий, которые конструкторы смогут использовать при проектировании перспективных двигателей различных концепций. В планах на ближайшие два года — разработать демонстратор и провести его испытания на стендах.
Запрограммировать и сделать «умным» можно любой двигатель?
Михаил Гордин: Не любой. Но, допустим, на мощном двигателе ПД-35 будет такая система. Уже сейчас наши наработки используются в АО «ОДК-Климов» для вертолетов и в АО «ОДК-Авиадвигатель». Они уже есть на двигателе ПД-14. Кстати, ПД-14 в своем классе конкуренции ничуть не «глупее», чем, к примеру, американский PW 1400 или европейский LEAP. И даже умнее.
Полетим на гиперзвуке
ЦИАМ участвует в международном проекте HEXAFLY-INT по созданию самолета на водородном топливе. Конструкторы обещают скорость 7-8 тысяч км/ч. Для такой супермашины нужен и супермотор?
Михаил Гордин: В проекте участвуют несколько стран. Головной исполнитель от России — ЦАГИ, мы соисполнители. Проект научно-исследовательский. Его суть — понять, возможно ли придумать конструкцию, которая будет летать и возить пассажиров со скоростью 7-8 Махов. Как любят говорить: из Лондона до Сиднея за три часа. Исследуются различные концепции, в том числе воздушно-реактивный прямоточный двигатель, который может быть использован для поддержания гиперзвуковой скорости. Это ниша ЦИАМ. Мы испытываем прототип такого двигателя.
Прототип кто делал?
Михаил Гордин: Он разработан европейцами, а изготовлен у нас на опытном производстве. И уже испытан. Результаты будут переданы в международную группу.
И как вы оцениваете первые результаты?
Михаил Гордин: Хорошо оцениваем.
Исчерпаны ли возможности традиционных газотурбинных моторов?
Михаил Гордин: Нет. В технологическом плане они совершенны, тем не менее исследования и разработки, научные и конструкторские, продолжаются. Уверен, появятся новые модели, еще более экономичные: за счет повышения КПД, облегчения веса, интеллектуализации. Вроде простая вещь — на 10% снизить расход топлива. На самом деле это огромный объем работы. С каждым годом все сложнее и сложнее находить дополнительные резервы для повышения весовой эффективности и КПД. Борьба идет за каждый процент.
Если говорить об аддитивных технологиях: на каких этапах их применение наиболее целесообразно?
Михаил Гордин: Прежде всего — на этапе проектирования и доводки. Когда создаешь новый двигатель, некоторые детали в единичном экземпляре намного быстрее сделать с помощью 3D-печати. В серийном производстве и при ремонте — не факт. Необходимо оценивать экономическую эффективность их использования. Аддитивные технологии всегда будут в серии по себестоимости дороже, чем традиционные. Я, например, не верю в двигатель, целиком распечатанный на 3D-принтере.
Самолет и его элементы — планер, фюзеляж — проектируются под перегрузки 9-10 g. А турбинная лопатка двигателя испытывает нагрузку в многие тысячи g!
Кроме этого возникает вопрос надежности. Про обычный металл мы знаем все: статистика огромная, понимаем, как он ведет себя в разных ситуациях. По использованию аддитивных технологий объем знаний пока намного меньше. Здесь важны и характеристики порошка или проволоки, и технология получения детали. Нужно несравнимо больше времени на различные испытания, чтобы быть уверенным: детали будут иметь необходимую надежность.
Могут ли цифровые технологии совсем вытеснить физические эксперименты?
Михаил Гордин: Принципиально невозможно. Критерием истины все равно останется физический эксперимент. Другой вопрос, что цифровые технологии, методы математического моделирования, скорее всего, приведут к сокращению объема испытаний. И ускорению проектирования. Это уже происходит.
То ли Глушко, то ли Туполев сказал: с хорошим двигателем и ворота полетят. Согласны?
Михаил Гордин: А еще говорят: в самолете все сопротивляется, только двигатель тянет. К таким выражениям отношусь с юмором. Но двигатель действительно самое наукоемкое механическое устройство по плотности инноваций и высоких технологий на кубический сантиметр. Для сравнения: самолет, особенно истребитель, и его элементы — планер, фюзеляж — проектируются под перегрузки 9-10 g. А турбинная лопатка двигателя испытывает нагрузку в многие тысячи g! То есть она должна быть очень легкой и в то же время выдерживать сумасшедшую нагрузку. Поэтому — суперматериалы. Поэтому — масса расчетов. Поэтому — сложная математика. В двигатель нельзя заложить чрезмерный коэффициент запаса, потому что он будет очень тяжелый, и ничего никуда не полетит.
Да, с хорошим двигателем даже ворота полетят. Но главное — его надо разработать до того, как приделать к воротам.
Рожденный ездить будет летать?
Ваши специалисты занимаются адаптацией мотора автомобиля «Аурус» для нужд малой авиации. Зачем?
Михаил Гордин: Мы взяли базовый автомобильный двигатель — лучший и самый мощный, что есть в России. В чем основная задача? Мы на примере этой работы покажем возможность создания на базе автомобильного двигателя авиационного варианта, продемонстрируем преимущества создания такого адаптированного двигателя по срокам и стоимости. Базовый автомобильный двигатель — более 600 лошадиных сил, мы его дефорсировали до 500. Это та мощность, на которой этот двигатель должен надежно работать на авиационных режимах.
Так не проще ли сразу делать «крылатый» мотор?
Михаил Гордин: Не проще и намного дороже. Надо признать: самолетов никогда не будет столько, сколько автомобилей. Поэтому у авиадвигателя всегда будет меньшая серия. И он всегда будет дороже. А тут есть возможность на предприятиях, которые освоили производство двигателей для машин, наладить их производство для авиационного применения. Что значит серия? Резко снижаются себестоимость, сроки изготовления. Причем все может быть произведено в России по уже освоенным технологиям.
Конечно, у авиадвигателей свои особенности, требования и ограничения. Нужно решить ряд научно-технических проблем. Что мы и делаем.
А в мире двигатели для машин летают?
Михаил Гордин: Летают. Есть австрийский авиационный двигатель АЕ-300, который был создан на базе дизеля от автомобиля «Мерседес». Есть другие примеры. Мы здесь не первые в мире, но в России точно первые.
30-е годы. После государственных испытаний. Второй справа сидит «автор» мотора М-34, ученик Жуковского, генеральный конструктор Александр Микулин. Фото: Предоставлено «ЦИАМ им. П.И. Баранова»
Хочу подчеркнуть: проект не ограничивается одним двигателем. На примере уже готового мы отрабатываем саму возможность адаптации. Научная работа будет закончена испытаниями на летающей лаборатории. Только летный эксперимент подтвердит, что технология стала авиационной. При продолжении финансирования полный цикл — адаптация и летные испытания — займет примерно три года.
Летающая лаборатория — какая?
Михаил Гордин: Она может быть на базе серийного двухдвигательного самолета, где один из двигателей заменяется на опытный. Может, это будет третий двигатель, который ставится дополнительно. Есть летающая лаборатория Ил-76, возможно, появится такая на базе Як-40. Существует еще несколько проектов летающих лабораторий на базе серийных самолетов, одну из силовых установок которых можно заменить экспериментальной. Двигатель будет проверяться и на земле, и в воздухе на всех рабочих режимах полета.
Эксперты утверждают: создание двигателя занимает намного больше времени, чем самолета. Это так?
Михаил Гордин: Цикл создания газотурбинного двигателя до серийного образца — 10-15 лет, самолета — 7-10. Для поршневого, конечно, меньше, но тут основная сложность — агрегатчики. Дело в том, что в какое-то время поршневая авиационная тематика просто выпала из поля зрения разработчиков летательных аппаратов. И, соответственно, пропали те, кто изготавливает компоненты, узлы и агрегаты. Так что сегодня работой над адаптацией автомобильного двигателя мы возобновляем и кооперацию. Доверие к техническим решениям восстанавливается непросто.
Импортные составляющие есть?
Михаил Гордин: Пока есть. Но в целом все локализуемо в России.
И для каких самолетов годится такой мотор?
Михаил Гордин: Для самолетов сельхозавиации с полезной нагрузкой до 1 тонны, самолетов местных линий — на 7-9 мест, большой беспилотной авиации. Он может стоять на учебно-тренировочном самолете типа Як-152. Задач для него много.
Но у нас сегодня, к сожалению, ситуация, когда двигатель в основном делается «под самолет». Это вызывает определенные технические сложности. И по весу, и по габаритам. Должно быть наоборот: создается двигатель, и на его основе проектируется летательный аппарат.
Кто может стать конкурентом для такого мотора?
Михаил Гордин: С технической точки зрения в таком классе мощности — и газотурбинные двигатели, и дизельные. 500-600 лошадиных сил — это как раз тот стык, где поршневая тематика начинает конкурировать с газотурбинной. Кроме того, наш двигатель будет работать на бензине, в том числе автомобильном. Логистика по его эксплуатации и мероприятия по обеспечению качества должны быть встроены в систему малой авиации. Это отдельная тема.
Если говорить о коммерческой конкуренции, то здесь в конкурентах только «иностранцы». Эта работа потому и заказана нам государством, что на отечественном рынке авиадвигателей такого класса нет.
Двигатель самолета
— Bilder und stockfotos
48.596Bilder
Bilder
FOTOS
GRAFIKEN
VEKTOREN
VIESOS
DUCHSTERN SATER 48.
596969696969696969696969696969.Spende. Odersuchen Sie nach турбина или двигатель, um noch mehr faszinierende Stock-Bilder zu entdecken.
реактивный двигатель — авиадвигатель стоковые фото и изображения
реактивный двигатель
Düsentriebwerk eines Flugzeugs
flugzeugstrahltriebwerksturbine — авиадвигатель стоковые фото и фотографии
Flugzeugstrahltriebwerksturbine
авиационный реактивный двигатель — авиационный двигатель стоковые фото и фотографии
Aircraft Jet Engine
реактивный двигатель — авиадвигатель стоковые фото и фотографии
реактивный двигатель
000024 Sonangnuntwerenk
турбина — самолетный двигатель стоковая графика, -клипарт, -мультфильмы и -символ
Реактивный двигатель турбина
flugzeugrumpf — самолетный двигатель стоковые фотографии и изображения
Flugzeugrumpf
detaillierte kontur einer flugzeugturbine aus schwarzen linien, isoliert auf weißemhintergrund. вектор-иллюстрация — графика двигателя самолета, -клипарт, -мультфильмы и -symbole
Подробный Контур с Flugzeugturbine aus schwarzen Linien,…
Detaillierte Kontur einer Flugzeugturbine aus schwarzen Lineien, isoliert auf weißem Hintergrund. Векториллюстрация.
selbstbewusster ingenieur im weißen hemd, der an einem düsentriebwerk mit einem augmented-reality-hologramm in einem büro im flugzeugmontagewerk arbeitet. Industriespezialist, der in der technologischen entwicklungseinrichtung arbeitet — стоковые фото и фотографии двигателей самолетов
Selbstbewusster Ingenieur im weißen Hemd, der an einem Düsentriebw
Motor des Flugzeugs — фото и изображения двигателей самолетов bilder
Flugzeugstrahltriebwerksturbine
Nahaufnahme der Flugzeugtriebwerksturbine
vielfältiges team von ingenieuren, die im büro in der industriefabrik arbeiten. industriedesigner diskutieren düsentriebwerk голограмма дополненной реальности. spezialisten arbeiten in der technologischen flugzeugentwicklungsanlage. — стоковые фотографии и изображения двигателей самолетов
Vielfältiges Team von Ingenieuren, die im Büro in der…
flugzeugstrahltriebwerksturbine — airplane engine stock-fotos und bilder
Flugzeugstrahltriebwerksturbine
Nahaufnahme der Flugzeugtriebwerksturbine
flugzeugstrahltriebwerksturbine — airplane engine stock-fotos und bilder
Flugzeugstrahltriebwerksturbine
flugzeugrumpf — airplane engine stock- fotos und bilder
Flugzeugrumpf
verladung von frachtcontainern zum flugzeug am flughafen — двигатель самолета стоковые фото и фото
Verladung von Frachtcontainern zum Flugzeug am Flughafen
Verladung von Frachtcontainern auf das Flugzeug am Flughafen. Bodenabfertigung Vorbereitung des Flugzeugs vor dem Flug an sonnigen Tagen.» n
jet-engine frontansicht isoliert auf weißemhintergrund. 3d-рендеринг — фото двигателя самолета и изображения
Jet-Engine Frontansicht isoliert auf weißem Hintergrund. 3D-Render
3 Jet-Engine
3 -Engine-Frontansicht isoliert auf weißem Hintergrund.3D-рендеринг.
querschnitt des turbofan-jet-motors — фото и изображения двигателей самолетов
Querschnitt des Turbofan-Jet-Motors
flugzeug-jet-triebwerkswartung im flugzeughangar — фотографии и изображения двигателей самолетов
Flugzeug-Jet-Triebwerkswartung im Flugzeughangar
турбина в гондоле. vorderansicht des kompressors. Люфтейнтритт. Motorteile und teil des flügels zurückgeführt. — Графика двигателя самолета, клипарт, мультфильмы и символы
Turbinen ein Flugzeugtriebwerk in einer Gondel. Vorderansicht…
Turbinen eines Flugzeugtriebwerks in einer Gondel. Vorderansicht des Kompressors. Люфтганзаугунг. Verfolgte Triebwerksteile und Teile des Flügels
Flugzeugteile. Вращение von Turbinschaufeln — графика двигателя самолета, -клипарт, -мультфильмы и -символ
Flugzeugteile. Вращение турбинного двигателя
реактивного двигателя zu abstrahieren, abstrakt, polygonale bestehend aus blue punkten und linien. Jet-Engine auf blaue tönung Hintergrund, 3D-рендеринг — двигатель самолета стоковые фото и изображения
Jet-Engine zu abstrahieren, abstrakt, polygonale bestehend aus…
boeing 747 flügel mit «motor» — двигатель самолета стоковые фото и изображения
Boeing 747 Flügel mit «Motor»
flugzeugblattmotor в неоновом свете. — двигатель самолета фото и изображение
Flugzeugblattmotor в неоновом цвете.
Flugzeugblattmotor in neonblauem Licht
jet engine — airplane engine stock-fotos und bilder
jet engine
Blauton-Düsentriebwerksklingen Nahaufnahme
vollformat-strahltriebwerk — airplane engine stock-fotos und bilder
Vollformat-Strahltriebwerk
fliegende rakete heck — airplane engine stock -фотографии и изображения
Fliegende Rakete Heck
Flying Rocket Tail 3D-Illustration
ein heller schöner spielzeugflugzeug-gleiter in den handen fliegt vor dem hintergrund eines blauen klaren himmels, starte, bewege dich nach oben — самолетный двигатель сток-фото и флюгер 9000 -Gleiter in den Händen. ..
Ein helles, schönes Spielzeugflugzeug in den Händen fliegt vor dem Hintergrund eines blauen, klaren Himmels an, hebt ab, bewegt sich auf und vorwärts
raketenschiff fliegt im himmel — двигатель для самолета клипарт, -мультфильмы и -символ
Raketenschiff fliegt im Himmel
oldtimer douglas dc-3 propellerflugzeug bereit für ausziehen — фото и изображения двигателей самолетов Флагплац. Bild im Schwarz-Weiß-Retro-Look.
nahaufnahme des triebwerks von flugzeugen — двигатель самолета фото и фотографии — стоковые фотографии и изображения двигателей самолетов
Vertikales Foto von grünen modernen zivilen Passagierflugzeugen…
реактивный двигатель. изолиерт. mit ausschnitt pfad — фото двигателя самолета и изображение
Jet-Engine. Изольерт. Mit Ausschnitt Pfad
vektorgraue turbinen-symbol auf weißem hintergrund — airplane engine stock-grafiken, -clipart, -cartoons und -symbole
Vektorgraue Turbinen-Symbol auf weißem Hintergrund
blaue klassische neon kreis geschwindigkeit disk hintergrund trendige farbe des jahres 2020 wirbel spiralwirbel verschwommene bewegung abstrakte glänzende marine farbverlauf muster digital generiert bild — стоковые фотографии и изображения двигателей самолетов
Blaue klassische Neon Kreis Geschwindigkeit Disk Hintergrund. ..
Blau Classic Neon Circle Speed Disk Hintergrund Trendy Farbe des Jahres 2020 Swirl Spiral Vortex Blurred Motion Abstract Shiny Navy Gradient Pattern Fractal Fine Art Digital Generated Image Design Vorlage für Präsentation, Flyer, Karte, Плакат, брошюра, баннер0002 APU-isometrische Blaupausen für Flugzeuggasturbinentriebwerke
Stilisierte Vektorillustration isometrischer Blaupausen der APU für Flugzeuggasturbinentriebwerke
kompressorschaufeln für düsentriebwerke — airplane engine stock-grafiken, -clipart, -cartoons und -symbole
Kompressorschaufeln für Düsentriebwerke
Stilisierte Vektorillustration von Blaupausen von Schaufeln von Triebwerkskompressorschaufeln
vorderansicht des jet-engine auf weißemhintergrund — стоковые фотографии и изображения двигателей самолетов
Vorderansicht des jet-engine auf weißem Hintergrund
Eine große weiße Strahltriebwerksturbine mit vielen miteinander verbunden silbernen Schaufeln und einer zentralen silbernen Kuppel in der Mitte der Strahlturbine. Es ist mit keiner Ebene verbunden und der Hintergrund ist schlicht weiß.
flugzeugmechaniker repariert flugzeugtriebwerk in einem flughafenhangar — стоковые фотографии и изображения двигателей самолетов0002 Strahltriebwerksröntgen Transparent mit Partikeln
jet-engine, Turbinenschaufeln von Flugzeug, 3d-рендеринг — двигатель самолета фото и изображения Isoliert auf Weiß
vorderansicht nahaufnahme von flugzeug реактивный двигатель турбина — двигатель самолета стоковые фотографии и фотографии
Vorderansicht Nahaufnahme von Flugzeug реактивный двигатель турбина
реактивный двигатель — двигатель самолета стоковые фотографии и изображения
реактивный двигатель
Düsentriebwerk vor blauem Himmel
вектор-реактивный двигатель — двигатель самолета сток-графика, -клипарт, -мультфильмы и -символ Vektor
corona-krise von Swiss International Airlines — двигатель самолета стоковые фото и изображения Сплавленный.
passagierflugzeug auf einem flugplatz — двигатель самолета стоковые фото и изображения auf weißemhintergrund — двигатель самолета стоковые фотографии и изображения
3D-рендеринг в разрезе Turbofan-Triebwerk изолирован на
3D-Clay-Cutaway-Rendering des Turbofan-Düsentriebwerks isoliert auf weißem Hintergrund. 3D-рендеринг-Bild.
люфтфарт-иконен. — Графика двигателя самолета, -клипарт, -мультфильмы и -символ
Luftfahrt-Ikonen.
nahaufnahme des triebwerks von flugzeugen — стоковые фотографии и изображения двигателей самолетов
Nahaufnahme des Triebwerks von Flugzeugen
«мотор» — стоковые фотографии и изображения авиационных двигателей
«Motor»
Der Motor wartet auf die Wartung.
3D-Drucker-Jet-Motor Gedruckt Modell Metall Kunststoff — фото и изображения двигателей самолетов
3D-Drucker-Jet-Motor Gedruckt Modell Metall Kunststoff
kommerziellen passagierflugzeug fliegen über den wolken — фотографии и фотографии двигателей самолетов Konzept des schnellen modernen Reisens
nahaufnahme der jet-engine lüfterflügel — фото и фотографии двигателей самолетов — стоковые фотографии и изображения двигателей самолетов
Der Gasturbinenmotor besteht aus der Verbrennung des Lüfterverdich
Detail des motors flugzeugflügel am terminal gate vor start — fernweh reisekonzept auf der ganzen welt mit dem flugzeug am flughafen — retro kontrastfilter mit hellblauen farbe tönen — двигатель самолета Stock-fotos 02 Detail 9des0 und bilder Flugzeugflügel am terminal Gate vor Start -. ..
überprüfung eines airbus a321-triebwerks in zürich in der Schweiz — фото и фото двигателя самолета
überprüfung eines Airbus A321-Triebwerks в Zürich in der Schweiz
neon blau rot abstrakte турбинные лопасти реактивный двигательhintergrund — авиационный двигатель стоковые фото и изображения
реактивный двигатель турбина klinge flugzeug vonhintergrund — авиационный двигатель стоковые фотографии и изображения
Jet-Motor Turbine Klinge Flugzeug von Hintergrund
Turbojet-Triebwerk des Flugzeugs aus nächster Nähe
von 100
Как запускается двигатель самолета?
Boldmethod
Вы завершили предполетную подготовку, и пришло время «надрать шины, и зажечь костры ». Но как ваш двигатель заставляет винт вращаться?
Компоненты
Чтобы понять процесс точной настройки системы зажигания вашего самолета, вам необходимо знать основные детали.
Аккумулятор
Маховик
Магнето
Свечи зажигания
Аккумулятор обеспечивает питание стартера, маховик крепится к гребному винту, а набор магнето крепится к дополнительному корпусу двигателя, а две свечи зажигания устанавливаются внутри каждого цилиндра.
Обзор
Чтобы запустить двигатель, выполните следующие действия:
Заправьте двигатель, заправив топливо во впускной коллектор
Пуск коленчатого вала (который раскручивает гребной винт) через стартер
Магнето начинают вращаться, подавая ток на свечи зажигания
Когда вы вращаете коленчатый вал, поршни перемещаются вверх и вниз. Затем внезапно… *бах*… свечи зажигания поджигают топливо в цилиндрах, запуская процесс сгорания
Николас Шелтон
Когда двигатель запущен, вы нажимаете клавиши в ОБОИХ фиксаторах, и вы готовы двигаться.
Некоторые основы двигателя
Теперь, когда у вас есть общее представление о компонентах и о том, как они вписываются в последовательность запуска, давайте углубимся.
Как ваш двигатель вырабатывает мощность? В большинстве поршневых самолетов используются четырехтактные двигатели, а это означает, что движение вашего двигателя можно разбить на четыре фазы: впуск, сжатие, мощность и выпуск.
Как работают магнето
Магнето работают по принципу электромагнитной индукции . Электромагнитная индукция — это принцип, согласно которому, если вы вращаете постоянный магнит внутри катушки с проволокой, вы генерируете ток. Этот ток проходит к свечам зажигания, где они используются для воспламенения топливно-воздушной смеси в ваших цилиндрах.
Вы можете управлять работой магнето с помощью замка зажигания. Большинство самолетов имеют как ЛЕВОЕ, так и ПРАВОЕ магнето, почему?
Короткий ответ: избыточность. Если один из ваших магазинов перестанет стрелять, другой продолжит работу вашего двигателя. Наличие двух отдельных магнето также помогает добиться более равномерного сгорания, повышая выходную мощность. Вот почему, когда вы делаете разбег и проверяете магазины, вы заметите небольшое падение оборотов между ОБЕИМ и ЛЕВЫМ/ПРАВЫМ фиксаторами.
Так что же на самом деле происходит, когда вы щелкаете ключом зажигания в ЛЕВОЕ и ПРАВОЕ положение? По сути, вы отключаете один из двух ваших магазинов, заземляя его.
Еще одной важной конструктивной особенностью системы зажигания от магнето является то, что она не зависит от электрической системы вашего самолета. Пока двигатель вращается и они не заземлены, они будут обеспечивать ток. Вот почему, если ваша электрическая система выходит из строя, ваш двигатель не просто останавливается.
Стартер
Стартер работает от аккумулятора. Его цель состоит в том, чтобы вращать маховик, прикрепленный к пропеллеру, чтобы ваши поршни двигались. Это достигается за счет небольшой шестерни, которая выходит из стартера и контактирует с маховиком.
Имейте в виду, что если вы пытаетесь запустить двигатель более одного раза, вам может потребоваться подождать между попытками запуска, иначе ваш стартер может перегреться. Проверьте в POH рекомендуемое время ожидания между попытками запуска. Некоторые стартеры рекомендуют выжидать до минуты между попытками запуска, чтобы ваш стартер мог остыть.
Общие проблемы
Посмотрим правде в глаза, запуск двигателя может быть проблемой. Иногда это так же просто, как неправильное заполнение или настройка смеси, но в других случаях может быть более глубокая основная проблема.
Одна из самых распространенных проблем возникает в самые жаркие месяцы года. Паровая пробка возникает, когда топливо в топливопроводах испаряется, превращаясь из жидкости в газ. Другими словами, ваше топливо закипело.
Когда ваши топливопроводы заполнены испарившимся 100LL, ваш топливный насос не может подать жидкое топливо к форсункам, что затрудняет запуск вашего самолета, затрудняет или делает его невозможным. Хотите узнать больше о пароизоляции? Кликните сюда.
Еще одна распространенная и потенциально опасная ошибка, которую вы можете совершить при запуске двигателя, — это перелив и перелив. Это часто происходит после первоначальной попытки запуска двигателя, когда вы пытаетесь решить проблему, добавляя больше праймера. Это приводит к скоплению топлива в цилиндрах. Когда вы собираетесь запускать двигатель в следующий раз, скопившееся топливо будет разбрызгиваться до тех пор, пока… бах! он воспламеняется, потенциально вызывая пожар и повреждая ваш двигатель.
Как узнать, сколько простых чисел слишком много? Не существует «одного ответа» для каждого самолета. Поговорите с опытным инструктором, который летает на том же самолете, что и вы, или со специалистом по техническому обслуживанию, который специализируется на вашем типе самолета.
Graeme Maclean
Для получения дополнительной информации о том, почему запуск двигателя вашего самолета может быть затруднен, ознакомьтесь с нашей статьей о распространенных ошибках при запуске двигателя.
Ваш двигатель запускается, когда нужные компоненты вращаются при добавлении топлива и искре. Знание этих основ не только поможет вам при следующем обзоре полета или контрольной поездке, но и может быть важно для увеличения срока службы и улучшения состояния вашего двигателя.
Этим постом я открываю небольшую серию сообщений, получившуюся в ходе нашей с Витей подготовки доклада для городского конкурса исследовательских работ и проектов “Шаг в науку”, проводящемся в МАН (Малой Академии Наук школьников).
В прошлом году Витя на этом конкурсе, а потом и на областном, и даже на всеукраинском занимал первые и вторые места с докладом “Исследование конструктивных особенностей и технических характеристик космических кораблей и ракет-носителей” в секции “Астрономия”. А еще раньше, в четвертом классе, Витин доклад в секции “Биология” о вкусовой карте языка занял третье место в двух городских конкурсах.
Поэтому в этом году мы были просто обязаны придумать еще что-нибудь не хуже:) Сейчас Витя решил делать доклад по физике. В этот раз он называется совсем просто – “Сила воды”. Про использование воды как источника для получения энергии. На днях Витя прошел пробный просмотр в школе, выступил, показал опыт. Учителя его хвалили. Надеюсь, и в МАН все будет хорошо.
Кроме написания теории (которая, увы, по прежнему висит только на мне, Витя тут не помощник), мы решили сделать и показать две модели двигателей, демонстрирующих способы получения энергии из воды: паровой турбины и водяной ракеты. Делать модели – это для Вити 🙂 Конечно, не обошлось без помощи Антона, но с каждым разом Витя все больше понимает в этом деле сам. А уж компьютерную презентацию потом делать и схемы рисовать – это Витя может уже лучше нас:)
Сегодня я напишу о первой модели для доклада – модели паровой турбины (вторая модель здесь).
Звучит важно. На самом деле – забавная штучка.
Вот видео работы нашей паровой турбины (39 секунд).
Катя все спрашивала: “А когда она полетит?” Видимо, ей колесо напоминало винт от вертолета. Да и мне эта штука напоминает космический корабль из кинофильма “Кин-дза-дза”. Пепелац 🙂
Принцип работы паровой турбины практически такой же как у чайника – из-за горения топлива в топке вода в резервуаре закипает, образуется пар, который под давлением вырывается через узенькую трубочку и крутит колесо укрепленной над трубочкой турбины. Энергию вращения турбины можно использовать для получения электричества. Именно так и делают на различного рода электростанциях – тепловых, геотермальных, ядерных. С помощью паровых турбин получается 86% электроэнергии в мире!
Схема работы модели паровой турбины. Рисовал Витя
Дальше мастер-класс по созданию парового двигателя:)
Для паровой турбины нам понадобится:
2 жестяных банки (у нас они были от сгущенки). Одна из них обязательно должна быть еще не открытая, потому что мы будем открывать ее особым способом!
Тонкая трубка или стальной стержень, в котором надо будет просверлить отверстие.
Когда все детали продуманы, приступаем к изготовлению. Самый интересный этап: берем целую банку, и в ее крышке пробиваем два диаметрально противоположных отверстия. Через них надо будет вылить содержимое банки. Так как у нас там была сгущенка, Витя очень быстро справился с заданием опустошить банку 🙂 Банку моем. Наш резервуар для воды готов.
Подготавливаем консервную банку 🙂
Вторую банку можно открывать как обычно, мы все равно будем разрезать ее пополам. Из нижней половины будем делать топку. Ножницами по металлу прорезаем отверстие для того, чтобы класть туда топливо. По окружности шилом делаем ряд отверстий, чтобы улучшить доступ кислорода (мы сначала не сделали, и огонь плохо разгорался).
Так выглядит топка паровой турбины
Из оставшихся от второй банки кусков жести надо вырезать колесо-крыльчатку для турбины и ушки-держалки для него. Этим занялся Витя.
Вырезание крыльчатки и держателей для нее
После этого все детали нужно припаять к резервуару. Тут уж Антон Вите помог. Сначала по окружности к дну резервуара надо припаять топку.
С помощью тонкого сверлышка Антон сверлит отверстие в металлическом стержне. А потом припаивает все детали модели.
Затем, к верху резервуара нужно припаять сверху на одно отверстие гайку. Это будет отверстие для наливания воды. Мы его будем закручивать шурупом, чтобы пар выходил только через второе отверстие. А на второе отверстие нужно припаять узкую трубочку и ушки для установки турбины
Модель паровой турбины. Вид сверху без крыльчатки
Подготовленная к установке крыльчатка турбины
С помощью длинного гвоздя устанавливаем турбину на место. Чтобы во время вращения она не съезжала, мы ее зафиксировали кусочками пластикового дюбеля.
Модель паровой турбины с установленной крыльчаткой
Все готово, можно наливать воду (не очень много, примерно 1/3 банки, чтобы закипала скорее), закручивать шуруп, класть в топку сухой спирт и поджигать. Как только вода закипит (где-то минут 3-5), пойдет пар и колесико закрутится.
Модель паровой турбины в действии
Мы не делали ничего, чтобы гасить огонь – таблетки сухого спирта как раз хватает на то, чтобы налюбоваться вращением. Только будьте осторожны – помните, что в банке кипящая вода, а снизу открытый огонь! Используйте прихватки и подставку для горячего из невоспламеняющихся материалов.
Общий вид паровой турбины
А тут можно посмотреть еще всякие научно-технические самоделки, которые делал Витя сам или с помощью Антона: Макет космического аппарата, Пищалка, Модель электрического мотора, Фонарик-пчелка, Прибор для проверки твердости руки, Радистский (телеграфный) ключ, Робот-мышь, Робот-паук, Водяная ракета, Светофор, Перископ.
Другие исследовательские проекты, которые делали мои дети для конкурсов Малой академии наук тут: Витя: “Исследование астероидов” (8 класс), “Сила воды” (7 класс), “Исследование конструктивных особенностей и технических характеристик космических кораблей и ракет-носителей” (6 класс), “Вкусовая карта языка” (4 класс),
Полный отчет об изготовлении простенького парового двигателя. Делал в основном из любопытства: одно дело теоретически знать, как там все работает, совсем другое — решить инженерную задачу изготовления паровика из всякого хлама.
Немного теории
Базовые принципы изготовления паровика изложены в книге Абрамова «Самодельные электрические и паровые двигатели». Идея использовать сантехническую арматуру взята из статьи «Паровой двигатель без станков и инструментов». Кое-что почерпнул из обсуждения «Паровой двигатель своими руками из дверных замков».
Принцип действия парового двигателя. Пар из котла подается в трубку золотника 1. В этой трубке ходит поршенек 2. В том положении золотника, который изображен на левом рисунке, пар проходит по трубке 4 в цилиндр 5 и толкает поршень 6. Шатун 7 толкает кривошип 8 вала 9. Вал с маховиком 10 проворачивается и второй кривошип 11 толкает тягу 12. Тяга закрывает золотник, перекрывая подачу пара из котла и стравливая давление в цилиндре. За счет маховика вращение вала не останавливается и продолжается движение до следующего цикла.
На схеме: 1. Трубка от золотника к паровому котлу. 2. Поршень золотника. 4. Трубка, соединяющая золотник и рабочий цилиндр. 5. Рабочий цилиндр. 6. Поршень рабочего цилиндра. 7. Шток поршня рабочего цилиндра. 8. Кривошип вала. 9. Вал. 10. Маховик. 11. Второй кривошип. 12. Шток поршня золотника.
Закупаемся
Все детальки были в наличии дома или докупались по мере необходимости в близлежащих магазинах.
Из сантехнического магазина: полудюймовый сгон на 75 мм, тройник, 2 штуцера на 7 мм и 4 штуцера на 9 мм, 4 полудюймовых муфты, стандартный крепеж для полипропиленовых труб — 4 шт.
Лирическое отступление: можно прийти в магазин сантехники и с интеллигентным видом попросить аэратор с внешней резьбой. А можно х…ю, которая в кран вворачивается. В первом случае продавец выдаст вам желаемое после секундного замешательства, во втором сразу. Так вот, сгон – это трубка; штуцер – фигня, чтоб шланг нацепить; муфта — фигня, чтоб две трубки сцепить.
Из магазина метизов: болты, гайки, гроверные шайбы и просто шайбы на 4 и 5 мм, россыпью, без счета. Отдельно длинная шпилька на 4 мм. Крепеж – 2 оцинкованных уголка на 75 x 75 мм, по 2 пластины на 80 и 100 мм. И еще 6 уголков на 15 x 15 мм. И еще нужен шланг на 8 мм, около 1 метра, чтоб с запасом.
Из спортивного магазина – хоккейная шайба.
Мастерим
Из штуцеров на 7 мм делаем головки цилиндров. Спиливаем лишнее, при желании еще можно рассверлить отверстие до 5 мм. Если оставить на 4 мм, то иногда закусывает шток поршня.
Шток поршня делается из 70 мм болта М4. Сам поршень состоит из двух гаек, между которыми плотно накручена ФУМ лента. На другом конце – крепление для шатуна, в моем случае – уголок 15 x 15 мм. Посередине – головка цилиндра. После сбора поршень надо притереть в цилиндре. В последствии поршень смазывал перед каждым запуском литолом.
Лирическое отступление. Самые большие проблемы в двигателе с поршнями – от качества их сборки зависит КПД. Но сделать вручную с минимальными допусками – чтоб поршень ходил легко и не было зазоров – очень сложно. Поршни переделывал несколько раз. В какой-то мере проблему решает смазка – она немного герметизирует и облегчает ход поршня.
Золотник нужен для управления потоком пара. Делаем его из тройника, на который с одной стороны через муфту прикручен поршень, с другой – 9 мм штуцер посаженый на ФУМ ленту. Сверху потом надо будет добавить еще один штуцер.
Поршень рабочего цилиндра делается из шпильки М4 длиной 75 мм. Технология изготовления аналогична поршню для золотника.
Рабочий цилиндр выполняет основную работу. Собирается из 75 мм сгона, 2 муфт, поршня и штуцера на 9 мм.
Лирическое отступление. Последующие испытания показали, что рабочий цилиндр слишком велик, и для его работы требуется весьма внушительный котел. Для более эффективной работы надо уменьшать ход поршня или сам цилиндр. Лучше сразу делать маленький высокооборотистый двигатель.
Золотник и рабочий цилиндр в сборе.
Шатуны нужны для преобразования поступательного движения во вращательное. Изготавливаются из 75 мм болтов М4, на концах – 15 мм уголки.
Кривошипно-шатунный механизм в сборе. Плечи кривошипа делаются из оцинкованных пластин, которые скрепляются между собой 40 мм М5 болтом. На кривошип сажается шатун, шатун крепиться к поршню. Изначально ход поршня планировался 70 мм, ход золотника 40 мм (это удвоенное расстояние между отверстиями в пластине или удвоенное плечо кривошипа). Потом, в процессе доработки стало 46 мм и 20 мм соответственно.
Половинка коленчатого вала. По сути сам вал – это два болта. Один болт, коротенький, 30 мм М5, второй длинный – 60 мм М5. На длинном потом будет висеть маховик. К болтам, под углом 90 градусов, крепятся кривошипы.
Сборка основания коленчатого вала. Вал висит на оцинкованных 75 мм уголках. Уголки крепятся к куску 14 мм фанеры.
Чтобы поршни были в одной плоскости с валом, монтируем на основании площадку из фанеры высотой 28 мм. На площадку ставим рабочий цилиндр и золотник. Выравниваем их положение, чтобы добиться оптимального хода поршней.
На золотник наворачиваем штуцер на 9 мм. Соединяем шлангом рабочий цилиндр и золотник. Все крепим, тестируем, переделываем. И еще раз, и еще…
Испытания двигателя
Не стоит надеяться, что эта фигня сразу заработает. Поэтому берем автомобильный компрессор, которым колеса накачивают, и подсоединяем его шлангом к золотнику, вместо котла. Компрессор легко обеспечивает рабочие давление в пару атмосфер, а мы вылавливаем ошибки конструкции.
Лирическое отступление, как происходят испытания. Собираем установку, включаем компрессор, двигатель делает ПФФФФФФ. Ага, поршни травят воздух – переделаем. Разбираем-правим-собираем. Снова включаем компрессор, двигатель делает ХРЯСЬ. Ага, закусывает шток поршня – расточим головку цилиндра. Разбираем-делаем-собираем, снова включаем компрессор…
В результате получаем работающий от компрессора двигатель:
Хоккейная шайба не потянула на маховик, пришлось вешать дополнительный противовес в виде накидного ключа на 14.
Работа от пара
Паровая машина с котлом. Котел собрал из уголка, бочки и муфты на 32. С торцов две закрытые заглушки. Сверху заглушка с внутренней резьбой на полдюйма.
До постройки модели был наивно уверен, что главная часть паровой машины – двигатель. По факту оказалось, что наиболее важен котел. Мои заблуждения были настолько глубоки, что поначалу попробовал запустить котел от 2 свечей. Ага, щас, за полчаса вода даже не начала закипать.
В результате котел грел на газе. С момента поджига рабочее давление достигается минуты через пять. Пара вырабатываемого котлом хватает примерно на 10 секунд работы двигателя, потом опять надо примерно 30 сек. набирать давление. Двигатель можно запускать в течении двух-трех минут, потом давление пара резко падает. До полного выкипания воды в котле проходит где-то 10 минут.
Все это безобразие мгновенно нагревается, пар получается непривычно горячим (если что — в кипящем чайнике пар относительно холодный), обжечься элементарно, ничего касаться нельзя. Из-за агрессивной среды оцинкованные болты окисляются чуть ли не на глазах.
02.07.2013
вк steam diy
Паровой двигатель, построенный с помощью ручных инструментов
Факел освещает путь
Что ж, наконец, я сломался и купил один из тех бутановых паяльников/паяльников размером с карандаш. Его цельнометаллическая конструкция и цена менее 20 долларов сделали его неотразимым. Эй, я всегда могу иметь при себе паяльник на случай, если возникнут какие-либо электронные чрезвычайные ситуации. Поэтому я заполнил форму заказа и стал ждать посылки. Когда он прибыл, это было прекрасно. Это крошечное и точное пламя паяльной лампы… Ах, но что с ним делать. Ситуация требовала какого-то небольшого интенсивного проекта с паяльной лампой. Гум. Я решил сделать двигатель героя. Я сделал один в начальной школе из консервной банки и нескольких кусков резинового шланга. Все это висело на гусенице и питалось от свечи. Даже на полном ходу его тяга была почти незаметна. Теперь у меня был шанс сделать то, что действительно может работать.
Я купил несколько кусков латунных трубок в художественном магазине и начал спаивать четырехструйный двигатель героя. Во время работы над этим я случайно упомянул об этом своему знакомому. Он сказал, что построил небольшую поршневую паровую машину двойного действия, и нарисовал небольшую диаграмму основного принципа на ближайшем конверте. Я был очарован. Я представлял себе создание чего-то, что будет трещать по ходу работы. Ух ты. Поэтому я отложил двигатель героя на второй план и (с конвертом в руке) решил построить свой собственный паровой двигатель.
Итак, я отправился в путь, имея только ручную дрель, ножовку и несколько напильников.
Я сделал золотниковые клапаны, шатуны и главный цилиндр из латунных труб из художественного магазина. Большой проблемой было найти подходящую головку поршня. Он должен точно входить в цилиндр. В художественном магазине были латунные трубки, достаточно большие, чтобы образовать цилиндр, но они не содержали каждый шаг увеличения размера, поэтому я не мог построить поршень, просто вложив трубки последовательных размеров и спаяв их в единую массу. Поэтому я провел много времени, прочесывая хозяйственные магазины в поисках латунного фитинга с правой стороны. Мне попался фланец, который был очень близко, поэтому я его отрезал и припаял к стержню главного привода. Затем я вставил его в имевшуюся у меня ручную дрель и (удерживая дрель ногами) сумел повернуть фланец и зажать его ворсовой ватой до нужного диаметра. (И люди удивляются, почему я в конце концов пошел и купил маленький токарный станок. 🙂
На фестивале радиолюбителей я нашел маховик в виде большой латунной шестерни, которая когда-то была частью старого радиоприемника. Я сделал (как я позже узнал, это называлось) вертикальный жаротрубный котел, припаяв латунный лист и трубку серебром. Первоначально я брал пар из верхней части котла, но из-за долгого прохождения по довольно тонкой трубке большая его часть конденсировалась в котле, поэтому я провел трубу вниз через кипящую воду через дно котла. и обратно через пламя, чтобы дать ему дополнительный импульс тепла, прежде чем отправиться в паровую машину. По-видимому, настоящие паровые котлы иногда имеют подобный элемент, называемый пароперегревателем. Я также изолировал сам котел для большей эффективности, и теперь мой паровой двигатель работает на двух маленьких спиртовых факелах. (Или я могу запустить его, дуя в него.) Удивительно, что можно собрать с помощью нескольких ручных инструментов. У меня есть очень ранний фильм о паровой машине в действии, а также более поздние изображения. Живой пар — это веселое хобби, и есть несколько страниц, посвященных именно этой теме.
Исходная страница в интернет-архиве
Извините за ужасное качество видео, оно было снято на Apple Quick Take, и я только сейчас преобразовал его в GIF. Я построил эту штуку в начале 1990-х годов, так что вы будете поражены тем, что на нее вообще есть какая-либо документация. Похоже, я изначально создал веб-страницу для этого в 2006 году.0001
Добро пожаловать в
Steam Traction World – дом качественных моделей с паровой тягой.
Мы производим превосходный ассортимент полностью обработанных крупномасштабных моделей в виде наборов, готовых для окончательной сборки, покраски и добавления ваших личных штрихов, чтобы «сделать их своими». У всех нас есть фиксированное количество времени. Наша цель — предоставить вам продукт, на создание которого с нуля ушли бы годы. Другими словами, мы продаем время. Время, которое позволит вам повеселиться со своим продуктом, а не тратить тысячи часов в мастерской с вероятностью того, что вы никогда не увидите завершенный проект.
Все поставляемые детали Steam Traction World полностью обработаны и готовы к сборке после окончательного удаления заусенцев, шлифовки и окраски. Большинство моделей можно приобрести в течение фиксированного периода времени, при этом комплекты будут поступать через регулярные промежутки времени, чтобы покупатель мог «строить так, как он/она покупает». Сборка и покраска вашей модели — это большое достижение, предмет гордости на долгие годы. Его можно было бы считать семейной реликвией, которая будет передана будущим поколениям. Мы полностью информируем наших нынешних и будущих клиентов, побуждая их задавать вопросы и участвовать в нашем популярном форуме Steam Traction World 9.0005
Steam Traction World — частная компания, базирующаяся в Великобритании, и мы отправляем нашу отмеченную многими наградами продукцию по всему миру. Мы занимаем собственное производство площадью 11 000 кв. футов в Давентри, Англия. Теперь у нас более 1000 клиентов по всему миру, которые пользуются паровыми двигателями Steam Traction World. Подробнее…
Архив
Новости
Автор Steam Traction World / Среда
Разве мы не преуспели? (далее…)
Подробнее
Новости
Ваши сборки
Автор Steam Traction World / Четверг
. .. и мы думаем, что это выглядит потрясающе. (подробнее…)
Подробнее
Подержанный паровой
Дин / Понедельник
Доступен для продажи один из самых красивых 4-дюймовых Showman, которые мы когда-либо видели. Потрясающе выглядит и работает так же хорошо, как…
Подробнее
Новости
Ваши сборки
Автор Steam Traction World / Понедельник
Ну вот и супер новости. Еще один двигатель готов. (подробнее…)
Подробнее
Новости
Ваши сборки
Автор Steam Traction World / Понедельник
Мы доставляем комплекты Steam Traction World по всему миру. (подробнее…)
Подробнее
Новости
Ваши сборки
Автор Steam Traction World / Saturday
Нам нравится эта фотография, сделанная Терри Стедом на его Foden в The Woodman. (подробнее…)
Подробнее
Архив
Новости
Автор Steam Traction World / Воскресенье
Steam Traction World будет закрыт в понедельник, 19 сентября, чтобы дать нашим сотрудникам возможность присоединиться к остальным…
Подробнее
Знаете ли вы? Все наши двигатели поставляются в виде «полностью обработанных комплектов». Они предназначены для сборки только с использованием ручных инструментов, таких как гаечные ключи, напильники, шестигранные ключи и т. д. Никакого оборудования (например, токарных станков, фрезерных станков, сварочных аппаратов) не требуется, так как все требует только снятия заусенцев, ручной обработки, подгонки, сборки. и покраска в ливрею на ваш выбор. Портативные ручные инструменты (такие как дрель, шлифовальный станок, напильник и т. д.) очень помогают ускорить процесс очистки. Все детали поставляются неокрашенными.
Автор Нина Кузнецова На чтение 5 мин Просмотров 79 Опубликовано Обновлено
Странные новости приходят с космических полей США – амбициозный проект «Артемида» по повторному «покорению» Луны и последующей экспансии на Марс, в самой своей основе имеет проблему. Двигатели RS-25, которые SLS будет использовать в первой ступени, не прошли огневые испытания.
Речь идет об огневых испытаниях двигателей ракеты-носителя Space Launch System, созданной для полетов к Луне и Марсу. В ходе испытаний специалисты проверяли работу четырех двигателей RS-25. Их установили на специальную опору на территории комплекса NASA в Миссисипи (США). Отмечается, что все четыре двигателя успешно загорелись, но планировалось, что они проработают вместе не меньше восьми минут, в то время как сотрудникам пришлось прервать испытания уже на 67 секунде. «Это не то, на что мы надеялись», — прокомментировал случившееся администратор NASA Джим Брайденстайн.
Источник
И хотя специалисты НАСА полны энтузиазма, утверждая, что даже неудачные испытания показали работоспособность системы в принципе, их чувства вызывают сомнения. Двигатели были в свое время разработаны для программы Space Shattle.
РС-25 (Ракетная система 25, англ. Rocket System 25, RS-25) или SSME (англ. Space Shuttle Main Engine — главный двигатель космического челнока) — жидкостный ракетный двигатель (ЖРД) компании Рокетдайн, США. Применялся на планере космической транспортной системы «Спейс шаттл», на каждом из которых было установлено три таких двигателя. Основными компонентами топлива двигателя являются жидкий кислород (окислитель) и водород (горючее). RS-25 использует схему закрытого цикла (с дожиганием генераторного газа).
Источник
Двигатель был разработан в 1972 году, имеет тягу 222,6 тс в вакууме, тяговооруженность 73,12. Топливная пара «кислород-водород» – летающая бомба с массой проблем, но дающая максимальную возможную тягу.
Его конкурент, который отлично зарекомендовал себя во всех американских космических программах российский двигатель РД-180 имеет тягу 423,4 тс в вакууме, тяговооруженность 77,3. Топливо «керосин-кислород» – не самый экологичный вариант, можно было бы уже и на метан перейти, но наиболее безопасный и технологичный.
Да, RS-25 однокамерный, а РД-180 – двухкамерный, поэтому сравнение, на первый взгляд, неверное, нужно поделить характеристики российского двигателя пополам. Но основная проблема не в этом – российский двигатель работает устойчиво, разработан позднее, широко используется. Но для перспективного проекта взят устаревший ракетный двигатель, хотя несколько американских компаний ведут разработки своих новейших двигателей. О чем это говорит? Почему «покорители Луны» до сих пор не могут разработать собственный мощный ракетный двигатель для тяжелой ракеты, которая должна заменить «легендарную» «Сатурн-5»?
Ответ, скорее всего, кроется в простых истинах – НАСА, не имея возможности реализовать в полном масштабе космические проекты, элементарно «пилит» бюджет, кормя налогоплательщиков красивыми сказками и голливудскими постановками о полетах в космос и на Луну.
При этом основной упор, как всегда, делается на беспилотные миссии, которые, справедливости ради, дают массу научной информации мировому сообществу о том, как устроен космос. Фотографии, получаемый с зондов, добравшихся до границ Солнечной системы, потрясают воображение. Картинки с Марса, отправляемые роверами, еще не скоро будут дополнены сторонними исследователями.
Но в большинстве своем ракеты, доставляющие беспилотные миссии в точку назначения, используют российские ракетные двигатели или изотопные топливные, изготовленные еще в СССР. Пока что похвалиться запуском человека в космос на низкую орбиту может только Илон Маск, но это всего лишь первая ступенька на пути к Луне и Марсу. Нужна реальная тяжелая ракета, способная доставить космонавтов в пункт назначения и желательно живыми.
Каждый раз, когда речь заходит об американской программе ракетных двигателей, возникает вопрос преемственности и поступательного развития технологий. Почему-то этих двух важнейших факторов никак не обнаруживается, каждая следующая разработка напрочь отметает все, созданное ранее, чтобы поставить на испытательный полигон нечто совершенно оригинальное. И каждый раз испытания таких ракетных систем растягиваются на годы, а то и прекращаются. Снова вспоминают о двигателях, ранее испытанных и достают их из хранилища, чтобы успеть в срок реализовать обещанное.
А что же в России, чем мы ответим на американскую программу SLS и перспективы, описанные Илоном Маском?
РД-171МВ представляет собой четырехкамерный ЖРД, использующий топливную пару керосин-кислород. При собственной массе 10,3 т изделие способно развивать в пустоте тягу 806 тс.
В НПО «Энергомаш» ранее рассказали, что мощность РД-171МВ составляет 246 тыс. лошадиных сил, а тяга при массе в 10 тонн превышает 800 тонн. Первый двигатель планируется передать заказчику в 2021 году для установки на первой ступени ракеты-носителя «Союз-5» (Иртыш), запуск которой запланирован на 2022 год с космодрома Байконур.
При использовании первой ступени с шестью двигателями РД-171МВ ракета «Енисей» будет иметь массу более 3100 т и сможет выводить на НОО нагрузку не менее 100 т. Для ГСО нагрузка будет составлять 25-30 т. Ракета с такими характеристиками может использоваться при организации межпланетных миссий.
Да, это будет не завтра, но двигатель уже прошел огневые испытания (успешные), под него разрабатываются ракетоносители и строятся планы покорения космоса. Надеюсь, вопрос финансирования будет решен без привлечения иностранных инвестиций – хватит делиться своими секретами с теми, кто использует их против нас самих.
Один вопрос остался нераскрытым – зачем НАСА использует устаревшие двигатели? Неужели нет ничего более нового и совершенного? А вы знаете ответ?
Автор кроме ведения блога еще и пишет книги. Недавно вышла в свет новая серия «Иной мир». Фантастические приключения героев на грани миров живых и умерших. Нет предела желаниям людей добиться желаемого, даже используя иной мир в своих интересах. Вы можете получить в подарок первую книгу из этой серии, оценить стиль автора и саму идею, чтобы сделать осознанный выбор – купить остальные 3 книги из этой серии! Думаю, это честный подход!
Более 30 лет я занимаюсь наукой и технологиями. Товарищи советовали мне делиться самым интересным на просторах интернета. Изучение нового и неопознанного это моя жизнь, узнавайте самое интересное со мной.
Сравнение ракетных двигателей Merlin, Raptor, BE-4, РД-180, RS-25 и F-1
В прошлом месяце на ресурсе Everyday Astronaut вышел чрезвычайно полезный и содержательный обзор современных и находящихся в разработке ракетных двигателей. Русский перевод статьи на днях опубликовал Alpha Centauri. Героями публикации стали следующие модели:
Merlin (SpaceX, США) — используется в ракетах семейства Falcon: 1 шт. на первой ступени Falcon 1, 9 шт. на первой ступени и 1 шт. на второй ступени Falcon 9, 27 шт. на первой ступени (по 9 шт. на каждом из трех ускорителей) и 1 шт. на второй ступени Falcon Heavy
Raptor (SpaceX, США) — проходит испытания, предназначен для сверхтяжелой ракеты BFR (31 шт. на первой ступени и 7 шт. на второй ступени)
BE-4 (Blue Origin, США) — проходит испытания, предназначен в частности для тяжелой ракеты New Glenn
РД-180 (НПО Энергомаш, РФ) — двухкомпонентный двигатель, используется в первых ступенях американских ракет Atlas III и Atlas V (1 шт. )
RS-25 (Aerojet Rocketdyne, США) — использовался в многоразовом орбитальном ракетоплане космического челнока Space Shuttle (3 шт.), также планируется к использованию в первой ступени (4 шт.) сверхтяжелой ракеты SLS
F-1 (Aerojet Rocketdyne, США) — использовался в первой ступени (5 шт.) свертяжелой (на сегодня — самой тяжелой из когда-либо созданных) ракеты Saturn V, на которой 50 лет назад был выполнен первый в истории пилотируемый полет с посадкой на Луну.
Ракетный двигатель Merlin
Прежде чем начать с описания характеристик всех шести двигателей, давайте вкратце рассмотрим основные их параметры:
Цикл. Он бывает открытым или закрытым. В открытом часть топлива используется для приведения в действие турбо-насосного агрегата (вращения турбины, подающей топливо из бака в двигатель), после чего отработанная струя газа отводится наружу и теряется.
В закрытом цикле эта струя из газогенератора турбо-насосного агрегата подается в камеру сгорания, пройдя предварительное окисление кислородом для полного выгорания, и таким образом увеличивает тягу. Эту чрезвычайно сложную технологию впервые разработали и использовали в СССР, в двигателе НК-15, созданном для сверхтяжелой ракеты Н-1 (все четыре её испытания закончились неудачей, проект был закрыт). Аналогичная схема применяется в РД-180, который великолепным назвал даже Илон Маск.
В США эту схему применили в двигателе, где вместо керосина использовался жидкий водород — RS-25 орбитального ракетоплана Space Shuttle (Aerojet Rocketdyne). Его советским аналогом стал РД-0120, созданный для второй ступени ракеты-носителя Энергия. В двигателе замкнутого цикла вместо одного общего газогенератора установлены два — отдельно для водородного и кислородного насосов (поскольку жидкий водород является намного менее плотным, чем керосин и жидкий кислород). Во избежание утечек взрывоопасного водорода инженеры Aerojet Rocketdyne задействовали специальные прокладки, находившиеся под давлением безопасного в этом отношении гелия.
Недостатком RS-25 было то, что кислород в нем газифицировался частично — остальная часть в смесительную головку камеры поступала в жидком виде. Полная газификация задумывалась только в трех двигателях:
РД-270 (СССР), разработка и испытания которого были приостановлены после сворачивания проекта по созданию сверхтяжелой ракеты УР-700
«Интегрированном демонстраторе силовой насадки» (США), разработка которого также была прекращена
Raptor компании SpaceX.
Таким образом, в случае удачи Raptor станет первым в истории серийным ракетным двигателем закрытого цикла с полной газификацией. Согласно Википедии, «при использовании данной схемы турбины могут иметь мéньшую рабочую температуру, так как через них проходит бóльшая масса, что должно привести к более продолжительному функционированию двигателя и его бóльшей надёжности». Как вы понимаете, для многоразовых ракет SpaceX это преимущество является ключевым.
Топливо. Рассматриваемые в статье ракетные двигатели используют один из следующих видов топлива: керосин, жидкий метан (природный газ) или жидкий водород. Ключевыми характеристиками топлива являются:
Плотность, измеряемая в граммах на литр. Чем она больше, тем больше топлива вместит топливный бак.
Соотношение масс сжигаемого горючего и окислителя (в качестве которого выступает жидкий кислород) — стехиометрический коэффициент. Сочетание плотности топлива со стехиометрическим коэффициентом определяет:
Количество литров топлива, требуемого на один литр окислителя. В свою очередь этот показатель определяет пропорцию объемов баков для топлива и жидкого кислорода.
Удельная тяга. Чем она больше, тем меньше топлива надо потратить, чтобы получить определённое количество движения. Выражаясь в секундах, удельная тяга показывает сколько времени двигатель может создавать тягу в 1 Н (Ньютон — сила, изменяющая за 1 секунду скорость тела массой 1 кг на 1 м/с в направлении действия силы), истратив при этом 1 кг топлива. Соответственно, чем удельная тяга больше, тем лучше.
Температура кипения — определяет температуру, при которой топливо из жидкого состояния переходит в газообразное. Чем она ниже, тем сложнее и дороже хранить данное топливо.
Температура горения — напротив, чем она ниже, тем лучше, поскольку меньше изнашивается двигатель (что опять же критично для многоразовых ракет).
В таблице снизу представлены все перечисленные выше характеристики:
Керосин (RP-1)
Жидкий метан
Жидкий водород
Плотность
813 г/л
422 г/л
70 г/л
Стехиометрический коэффициент
2.7
3.7
6
Кол-во топлива на 1 л окислителя
0.52
0.73
2.72
Удельная тяга
370 сек
459 сек
532 сек
Температура кипения
490 К
111 К
20 К
Температура горения
3,670 К
3,550 К
3,070 К
Как видим, в целом керосин в качестве топлива представляется более предпочтительным, за исключением таких параметров как удельная тяга и температура горения — здесь лидирует водород и занимает промежуточное положение метан. Почему же, в таком случае, некоторые производители ракет керосину предпочли метан или водород? Ответ кроется в миссиях, для которых эти ракеты, с заделом на будущее, предназначены — метан с водородом можно производить на Марсе. И соответственно не брать с собой топливо на обратную дорогу.
Теперь давайте рассмотрим характеристики самих ракетных двигателей:
Merlin
Raptor
BE-4
РД-180
RS-25
F-1
Производитель
SpaceX (США)
SpaceX (США)
Blue Origin (США)
НПО Энергомаш (РФ)
Aerojet Rocketdyne (США)
Aerojet Rocketdyne (США)
Ракета-носитель
Falcon 9 (9 + 1) Falcon Heavy (27 + 1)
BFR (31 + 7)
New Glenn (7)
Atlas III (1) Atlas V (1)
ракетоплан Space Shuttle (3) SLS (4)
Saturn V (5)
Первый рабочий полет
2010
2021
2021-2022
2000 2002
1982 2020
1968
Цикл
Открытый
Закрытый (полная газификация)
Закрытый (частичная газификация)
Закрытый (частичная газификация)
Закрытый (частичная газификация)
Открытый
Топливо
Керосин
Метан
Метан
Керосин
Водород
Керосин
Давление в камере
97 бар
270 бар
135 бар
257 бар
206 бар
70 бар
Тяга
0. 84 мН
2.00 мН
2.40 мН
3.83 мН
1.86 мН
6.77 мН
Тяговооруженность
198:1
107:1
80:1
78:1
73:1
94:1
Удельная тяга
282 сек 311 сек
330 сек 350 сек
310 сек 340 сек
311 сек 338 сек
366 сек 452 сек
263 сек 304 сек
Здесь следует сразу оговорить, что приведенные в таблице характеристики не являются рекордными — например, у 4-камерного советского двигателя РД-170, разработанного для ракеты-носителя «Энергия», тяга была на несколько процентов больше, чем у F-1 — при том, что последний был крупнее и расходовал больше топлива.
Что касается эффективности, то её обычно оценивают по тяговооруженности (отношению тяги двигателя к его весу) и, в большей степени, удельной тяге. Напомню, что она показывает сколько секунд двигатель сможет создавать тягу в 1 Ньютон, истратив при этом 1 кг топлива. В таблице удельная тяга приводится в двух значениях, на уровне моря и в вакууме. В нашей таблице по тяговооруженности с большим отрывом от всех остальных двигателей лидирует Merlin, а по удельной тяге — RS-25.
Но пожалуй главный интерес представляет цена вопроса — сколько же стоят все эти двигатели? Если сведения Everyday Astronaut более-менее достоверны, то картина складывается такая:
Merlin
Raptor
BE-4
РД-180
RS-25
F-1
Цена одного двигателя
< $1 млн
~$2 млн
~$2 млн
$25 млн
> $50 млн
$30 млн
Ракета-носитель
Falcon Heavy
BFR
New Glenn
Atlas V
SLS
Saturn V
Кол-во двигателей у первой ступени
27
31
7
1
4
5
Полная стоимость
$27 млн
$62 млн
$14 млн
$25 млн
$200 млн
$150 млн
Цена на 1 кН (единицу тяги)
$1,170
$1,000
$3,333
$6,527
$26,881
$4,431
Ресурс (кол-во запусков)
10
50
25
1
19
1
Полная стоимость на один полет
$2. 7 млн
$1.24 млн
$0.56 млн
$25 млн
$10.5 млн
$150 млн
Полезная нагрузка (НОО)
30 т (1)
100 т
45 т
20 т
95 т
140 т
Полная стоимость на 1 т
$90 тыс
$12.4 тыс
$12.4 тыс
$1.25 млн
$110.5 тыс
$1.07 млн
(1)Как уже рассказывал Gadgets News, в многоразовой опции полезная нагрузка Falcon Heavy составляет не 63.8 т, а 30 т — требуется брать больше топлива для возврата трех бустеров первой ступени. В отношении остальных многоразовых ракет я исхожу из того, что заявленная по ним полезная нагрузка также относится к многоразовой опции.
Обратите внимание, что в стоимость доставки на НОО заложена цена только двигателей первой ступени. По этому критерию мы получаем любопытное совпадение между BFR и New Glenn — $12.4 тыс за одну тонну. Это примерно на один порядок дешевле Falcon Heavy и SLS, и на два порядка — Atlas V и Saturn V.
Как уже рассказывал Gadgets News, путем сравнения цены запуска Falcon Heavy в разных опциях получается, что центральный ускоритель первой ступени FH оценивается SpaceX в $5 млн, а боковые — по $27.5 млн каждый. Откуда взялась столь существенная разница между, казалось бы, примерно одинаковыми ускорителями, непонятно. Я подозреваю, что сведения о цене запуска FH с сохранением всех трех ускорителей ($90 млн) неверны — уверено можно говорить лишь о ценах запуска с потерей двух боковых и центрального ($150 млн), а также с сохранением двух боковых ($95 млн) ускорителей. Предполагая примерно одинаковую цену всех трех ускорителей, будем считать, что настоящая цена запуска FH с полным сохранением первой ступени составляет 95-(150-95)/2=$62.5 млн. Эта цена почти соответствует запуску Falcon 9 с сохранением первой ступени.
Правда, и в этом случае не вполне понятно почему вторая ступень FH стоит 150-30×3=$60 млн, а вторая ступень Falcon 9 — 60-30=$30 млн (для простоты все числа округлены). Разницу в $30 млн предварительно будем считать наценкой за сложность. В перспективе, вероятно, цены второй ступени FH и Falcon 9 сравняются на уровне $30 млн, что составляет $1 млн за тонну (напомню, что полезная нагрузка FH с возвратом первой ступени составляет 30 т). Исходя из ресурса первой ступени (три ускорителя по цене $30 млн каждый) в 10 запусков, полная цена доставки на НОО одной тонны полезного груза ракетой FH составит (30×3)/10/30 + 1 = $1.3 млн (в т.ч. $90 тыс — за износ двигателей). Для сравнения, отправка на НОО 63.8 т полезного груза с потерей первой ступени ($150 млн) стоит $2.3 млн.
Таким образом, будущее снижение стоимости запусков Falcon Heavy обещает стать существенным, но отнюдь не революционным. Другое дело — BFR, у которой многоразовыми являются обе ступени, и вдобавок заявленный ресурс составляет 50 запусков. Если сделать смелое допущение, что и у BFR на ракетные двигатели приходится около 1/3 цены, то полная стоимость этой сверхтяжелой ракеты составит (31+7)×2×3=$228 млн. С учетом дополнительных сложностей её изготовления округлим эту сумму до $250 млн. Соответственно каждый из 50 запусков будет стоить $5 млн, а стоимость доставки груза на НОО составит $50 тыс за тонну. И вот это на рынке орбитальных запусков действительно станет революцией — если, конечно, сбудутся обещания SpaceX.
НАСА заказывает еще 18 двигателей RS-25 для лунной ракеты SLS стоимостью 1,79 миллиарда долларов. Фото: NASA
За четыре года до того, как следы человеческих ботинок снова появятся на пыльной поверхности Луны, НАСА заключило контракт на сумму 1,79 миллиарда долларов с компанией Aerojet Rocketdyne из Сакраменто, штат Калифорния, на изготовление 18 дополнительных двигателей RS-25 для гигантского космического корабля. Система запуска (SLS). Этот мощный двигатель обеспечил запуск 135 космических челноков со стартовой площадки в период с 19 апреля по 19 апреля.81 и июль 2011 года, а его следующая миссия обеспечит мощность для SLS, которая в настоящее время нацелена на свой первый рейс в следующем году.
Пятничное соглашение доводит контракт RS-25 между НАСА и Aerojet Rocketdyne почти до 3,5 миллиардов долларов и может поддерживать до шести полетов SLS к 2029 году.
Контракт позволяет НАСА работать с Aerojet Rocketdyne над созданием ракеты. двигателей, необходимых для будущих миссий», — сказал Джон Ханикатт, руководитель программы SLS. в Центре космических полетов имени Маршалла (MSFC) НАСА в Хантсвилле, штат Алабама. модифицированы надежные двигатели, запустившие более 100 миссий космического корабля «Шаттл» быть еще более мощным, чтобы запустить следующих космонавтов, которые ступят на лунной поверхности во время миссий Artemis».
В его первоначальный облик — главный двигатель космического корабля (SSME), криогенная жидкость RS-25, работающий на кислороде/водороде, появился полвека назад, когда НАСА выбрал то, что тогда было подразделением Rocketdyne North American Rockwell Corp. спроектировать, построить, испытать и поставить двигатели для программы шаттлов. В апреле В 1972 году контракты НАСА, оцениваемые в 450 миллионов долларов, санкционировали начало работ над двигатель с Критической проверкой конструкции (CDR) прошел в сентябре 1976 года и первое испытание двигателя в сборе 19 марта77. Начало с СТС-1 в апреле 1981 г. три многоразовых РС-25 проставили в конце каждый шаттл, производящий почти 1,2 миллиона фунтов (535 000 кг) тяги при старт.
Каждый шаттл приводился в движение тремя главными двигателями космического челнока RS-25 (SSME). Они были испытаны перед первым полетом каждого орбитального аппарата во время стрельбы по готовности к полету (FRF). Изображение предоставлено: Aerojet Rocketdyne
. Один полет шаттла в июле 1985 года потерпел драматическое прерывание в полете, и программа испытала пять отключений на площадке во время последовательности запуска двигателя, в то время как еще один чудом предотвратил возвращение на стартовую площадку (RTLS). прервать, но в общей сложности 46 РС-25 совершили 135 вылетов шаттлов до июля 2011 г., при этом примерно 99,95% успеха. Эти двигатели были значительно модифицированы за эти годы, получив сертификацию для работы на более высоких уровнях мощности, улучшенные сварные швы и функциональность главного инжектора, улучшенные турбонасосы и увеличенный срок службы.
Последняя версия двигателя эпохи шаттлов включала надежный топливный турбонасос высокого давления и позволяла развивать мощность до 109 процентов. Он также был прочнее и надежнее, чем предыдущие двигатели, благодаря устранению нескольких сварных швов, включению более прочных подшипников и сложному процессу литья корпуса турбонасоса.
Четыре двигателя RS-25, которые будут использоваться при первом запуске SLS лунной миссии НАСА «Артемида». Фото: НАСА
списания флота шаттлов, ожидалось, что РС-25 сыграет свою роль в программа Constellation, обеспечивающая питание ядра и второй ступени Ares V. тяжеловес, хотя эту роль со временем взяли на себя другие двигатели. Созвездие был отменен в 2010 году, и было уделено внимание продажа или дарение инвентаря НАСА RS-25 музеям или университетам США. Однако с появлением программы SLS в Сентябрь 2011 года почтенный старый двигатель был возродился, чтобы поднять основную ступень новой ракеты. Четыре RS-25 будут питать каждый SLS, но в отличие от шаттла они не будут использоваться повторно, и поэтому оставшиеся запас двигателей будет быстро исчерпан.
Как такой, в Ноябрь 2015 г. НАСА заключило с Aerojet Rocketdyne контракт на 1,16 млрд долларов на девять лет, чтобы возобновить производство РС-25, чтобы широко модернизировать двигатель для сделать его более доступным для SLS. Это выиграет от меньшего количества деталей и сварных швов. и будет сертифицирован для более высоких настроек тяги до 111 процентов от номинальной. производительность, развивающая 521 000 фунтов (236 300 кг) при взлете. Шестнадцать уцелевшие RS-25 эпохи шаттлов были тщательно модернизированы и испытаны и будут пройдите первые четыре миссии с помощью нового усилителя.
Когда система космического запуска (SLS) полностью заработает, она обещает стать самой мощной ракетой в мире и единственной ракетой-носителем, способной к 2024 году отправить пилотируемый корабль на Луну. Изображение предоставлено: НАСА
НАСА также воспользовалась опционом на контракт с Aerojet Rocketdyne на производство шести совершенно новых двигателей. «Мы уже начали производство первых шести новых двигателей РС-25», — сказал он. Джонни Хефлин, менеджер по двигателям SLS. «Aerojet Rocketdyne перезапустила производственные линии, создали базу поставщиков и свои строительные двигатели с использованием передовые технологии, которые сокращают как стоимость, так и время изготовления каждого двигатель.» Те шесть двигателей, поставка которых должна начаться в 2023 году, цель более чем на 30 процентов снизить затраты на будущее производство по сравнению с своим предшественникам эпохи шаттлов.
А с присуждением в пятницу контракта на еще 18 двигателей НАСА сможет поддерживать еще шесть миссий SLS; четыре двигателя на ускоритель. По данным Aerojet Rocketdyne, 18 двигателей по-прежнему используют оптимизацию цепочки поставок и внедрение современных методологий, включая аддитивное производство. «Страна возвращается на Луну и продвигается вперед с планами по исследованию других направлений в дальнем космосе, включая Марс», — заявила генеральный директор и президент Aerojet Rocketdyne Эйлин Дрейк. «Этот контракт гарантирует, что наши проверенные в полете двигатели RS-25 будут использоваться на каждом этапе пути, поскольку НАСА успешно и безопасно достигает этих целей».
.
.
ПОДПИСЫВАЙТЕСЬ на AmericaSpace на Facebook и Twitter 90!
.
.
Нравится:
Нравится Загрузка…
НАСА запускает серию испытаний нового ракетного двигателя РС-25 опытного двигателя RS-25 в Космическом центре Стенниса 15 декабря. (Фото предоставлено НАСА)
КОСМИЧЕСКИЙ ЦЕНТР СТЕННИС, штат Миссисипи — От НАСА:
Первый горячий пожар новой серии был проведен в течение полных 500 секунд на испытательном стенде Фреда Хейза (ранее испытательный стенд А-1) в Космическом центре Стенниса, недалеко от Бэй Сент-Луис, Миссисипи.
Предстоящий график испытаний разделен на три этапа:
Первоначальная серия из пяти испытаний, запланированных на следующую весну, будет использовать экспериментальный двигатель № 0525 для сбора данных о производительности различных новых компонентов двигателя, изготовленных с использованием современных технологий. — художественные методы изготовления, такие как горячее соединение изостатическим давлением и селективное лазерное плавление, чтобы сократить как стоимость, так и время создания новых двигателей.
Второй этап из 12 испытаний начнется следующим летом с сертификационного двигателя, произведенного со всеми новыми деталями на заводе Aerojet Rocketdyne в ДеСото, Калифорния. Он идентичен новым двигателям, выпускаемым для полетов после Artemis IV.
Третий этап из 12 испытаний последует за серией сертификации и будет проводиться с экспериментальным двигателем, который будет иметь многие из тех же деталей, что и сертификационный двигатель, а также будет использоваться для сертификации новых двигателей для полета.
«Эти новые двигатели будут иметь такие же высокие характеристики, как и модернизированные двигатели эпохи шаттлов, которые использовались для первых миссий Artemis, но с ожидаемой экономией производственных затрат более чем на 30% по сравнению с двигателями из программы шаттлов», — сказал Джонни Хефлин, руководитель Менеджер жидкостных двигателей SLS в Центре космических полетов Маршалла в Хантсвилле, Алабама. «Эти испытания гарантируют, что новые двигатели готовы к полетам поколения SLS».
Четыре двигателя РС-25 вместе с парой твердотопливных ускорителей помогут запустить SLS. Работая одновременно, двигатели будут генерировать суммарную тягу в 1,6 миллиона фунтов при старте и 2 миллиона фунтов во время набора высоты. НАСА уже завершило испытания двигателей для первых четырех миссий Artemis в рамках плана агентства по возвращению людей, в том числе первой женщины и первого цветного человека, на Луну в рамках подготовки к возможным полетам на Марс.
Этот последний раунд испытаний является частью продолжающейся программы по разработке новых двигателей и компонентов RS-25 для будущих миссий Artemis в дальнем космосе. На каждом этапе инженеры внедряют новые компоненты в экспериментальные двигатели. Компоненты, протестированные в этой серии, включают недавно изготовленные турбонасосы, воздуховоды, жгуты и клапаны. Также будет включен ранее протестированный аккумулятор pogo. Аккумулятор pogo, изготовленный методом селективного лазерного плавления, гасит колебания давления топлива во время подъема транспортного средства.
«Последние несколько лет наша команда усердно работала над обновлением конструкции нескольких ключевых компонентов RS-25 и их изготовлением с использованием передовых производственных технологий, чтобы оптимизировать производственный процесс и значительно снизить затраты», — сказал Джефф Зотти, представитель Aerojet Rocketdyne. Директор программы RS-25 в Aerojet Rocketdyne, ведущий подрядчик по двигателям SLS. «Серия испытаний Retrofit-3 позволит нашим инженерам проверить работу этих новых компонентов».
Данные испытаний помогут Aerojet Rocketdyne обеспечить соответствие двигателей RS-25 руководящим принципам НАСА для пилотируемых полетов на Луну и Марс. Чтобы обеспечить качество работы, операторы будут сравнивать данные для современных компонентов двигателя, изготовленных с использованием новых технологий, с предыдущими данными для компонентов, разработанных с использованием более старых методов производства.
«Очень интересно начать следующую серию испытаний, которая приблизит нас к новым двигателям RS-25, — сказал Чип Эллис, руководитель проекта испытаний Stennis RS-25. «Эти новые серийные RS-25 позволят SLS продолжать исследования на долгие годы».
Предыдущий этап испытаний РС-25 завершился снятием опытного двигателя РС-25 № 0528 с испытательного стенда А-1 25 октября. В ходе этой серии операторы собрали данные из серии из семи проведенных огневых испытаний. с 28 января по 30 сентября и подтвердил, что все основные цели испытаний были успешно достигнуты.
НАСА строит SLS как самую мощную ракету в мире. SLS и космический корабль Orion, а также коммерческая система посадки человека и Gateway на орбите вокруг Луны являются основой НАСА для исследования дальнего космоса.
Что такое «гибридный автомобиль» и какими они бывают
«Гибридный автомобиль» – вещь очень модная, а для многих – еще и загадочная. Так что же это такое, какими они бывают? Расскажем вкратце.
TechInsider
Item 1 of 2
1 / 2
Мягкий гибрид BMW 7 ActiveHybrid: электродвигатель помогает в работе двигателю внутреннего сгорания
Слово «гибрид» происходит из латинского языка и означает нечто, имеющее смешанное происхождение или сочетающее разнородные элементы. Применительно к автомобильным технологиям оно обозначает автомобиль с двумя типами силового агрегата. Обычно это — двигатель внутреннего сгорания и электродвигатель.
В облегченных гибридных установках электродвигатель используется лишь как вспомогательный для двигателя внутреннего сгорания (ДВС). Но в полноценной гибридной установке ДВС более эффективно спарен с электродвигателем. Причем электродвигатель используется довольно мощный, способный самостоятельно приводить автомобиль в движение на небольших скоростях.
Для современных автопроизводителей «гибридный автомобиль» означает нечто большее, чем простое интегрирование электромотора в силовую установку. Это — «интеллектуальное» управление потоками энергии в автомобиле. Эффективное сочетание ДВС с электродвигателями снижает расход топлива, токсичность выхлопов, улучшает динамику и комфорт при движении. Хороший пример тому — роскошный BMW 7 ActiveHybrid, о котором мы рассказывали в заметке «Активные гибриды». Сегодня автоконструкторы развивают пять основных разновидностей гибридных автомобилей.
Последовательный. В такой гибридной системе ДВС работает в максимально экономичном режиме, исключительно для того чтобы заряжать батарею электродвигателя. Сам автомобиль приводится в движение электромотором.
Параллельный. В таком гибриде ДВС и электродвигатель работают независимо друг от друга, и, в зависимости от типа (мягкий или полный гибрид), могут приводить автомобиль в движение одновременно или по очереди.
Мягкий. Здесь традиционный стартер и генератор полностью заменены на электродвигатель, который используется для запуска двигателя и его поддержки. Это помогает увеличить динамику автомобиля и снизить потребление топлива примерно на 15%. Электромотор и батареи не предназначены для того, чтобы самостоятельно приводить автомобиль в движение. Зато это дает возможность значительно их облегчить и удешевить, в сравнении с компонентами полного гибрида. BMW 7 ActiveHybrid использует как раз концепцию мягкого гибрида.
Полный. В полностью гибридных системах автомобиль может приводиться в движение электромотором на любом этапе движения: и при ускорении, и в движении с постоянной скоростью. Например, в «городском цикле» автомобиль может использовать один только электродвигатель. Компоненты системы такой концепции заметно больше, массивнее, их гораздо сложнее установить, чем в случае с «мягким» гибридом. Тем не менее, они могут значительно улучшить динамику автомобиля. Кроме того, использование только электроэнергии при движении в городе может снизить расход топлива на 20%. Полным гибридом является автомобиль BMW X6 ActiveHybrid.
Аккумуляторный. Емкость, размер и масса аккумулятора зависят от его назначения. В последние годы новые разработки в этой области значительно расширили возможность применения батарей в автомобилях. Высокая емкость и долговечность делают Li-Ion и Ni-MH источники питания полностью пригодными для использования в гибридных автомобилях.
как работает, классификации и особенности данных авто
Гибридные авто, как следует из их названия, представляют собой симбиоз машины с двигателем внутреннего сгорания и электромобиля. Мода на такие автомобили пришла в девяностые годы — производители боролись за экономию топлива и экологическую чистоту транспортных средств. Но на самом деле гибрид изобретен очень давно.
Немного истории
Первые гибридные машины появились на заре автомобилизации, в конце девятнадцатого — начале двадцатого веков. Тогда они распространения не получили. Позднее по такой схеме строились (и строятся) тяжелые карьерные самосвалы. Представьте себе, какого размера должна быть коробка передач на мощном многотонном монстре? А кардан? А редуктор моста? Поэтому на таких машинах применяется схема дизель — электрохода. ДВС крутит генератор, тот, в свою очередь, питает тяговые электрические двигатели, на каждое ведущее колесо — свой. Это не что иное, как последовательный гибрид. Что такое «последовательный» и какие бывают еще гибриды — сейчас расскажем.
Как работает гибридный автомобиль
Гибридные машины можно разделить по принципам взаимодействия электродвигателя и бензинового мотора. Кстати, на подавляющем большинстве гибридов используется именно бензиновый агрегат. Последовательным называется гибрид, где ДВС механически не связан с ведущими колесами, а лишь вращает генератор. На легковых машинах такая схема применяется достаточно редко. Большие потери энергии и низкий КПД силовой установки делает ее неэффективной. Если же использовать маломощный ДВС для подзарядки тяговой батареи, которую изначально зарядили «от розетки», то можно увеличить пробег автомобиля на одной зарядке. И такие типы гибридов существуют. Другая система взаимодействия моторов разных типов называется параллельной. Здесь с ведущими колесами связаны оба двигателя. Часто электромотор (он же — генератор) встроен в маховик бензинового мотора. При необходимости, при интенсивном разгоне, например, работают оба двигателя. А когда мощность ДВС используется не полностью, можно часть ее использовать для зарядки аккумулятора. В процессе торможения гибрида происходит подзарядка батарей за счет рекуперации. На современных гибридных транспортных средствах используют и более сложные, смешанные схемы. У полноприводных гибридов колеса одной оси могут приводиться двигателем внутреннего сгорания, а другой — электромотором. Другой вариант: ДВС, электродвигатель и генератор связаны через планетарный редуктор. За их совместную работу отвечают электронные «мозги». Электроника решает, кому и когда крутить колеса, когда и сколько времени заряжать батарею. Водителя все это не касается. Он управляет обычным автомобилем: газ, тормоз, коробка — автомат…
Классификация гибридов
Мы добрались до самой главной классификации современных гибридных транспортных средств — по доле участия электромотора в движении автомобиля.
Микрогибрид
Настолько «микро», что и не гибрид вовсе. Но упомянем, для порядка. В таких машинах есть система рекуперации, которая при торможении заряжает аккумулятор. Причем обычный, не тяговый. Тягового просто нет, как и электродвигателя. Зато не тратится лишняя мощность мотора и топливо на зарядку батареи. Машина немножко «позеленела», но все же не стала гибридом.
Мягкий гибрид
Все как положено: ДВС, электродвигатель, тяговый аккумулятор. Только батарея скромная, а электромотор маломощный. Помочь бензиновому собрату, когда тому трудно, он может. А вот самостоятельно двигать авто электрическому двигателю не по силам. Это уже настоящий гибрид. Но первую скрипку по-прежнему играет двигатель внутреннего сгорания.
Полный гибрид
Схема та же, но электромотор мощнее, а тяговая батарея более емкая. Такие машины позволяют проехать несколько километров с небольшой скоростью на электрической тяге. Если нужно дальше или быстрее — подключается ДВС. Роль электричества еще выросла, но пока не стала главной.
Гибрид — плагин
Как работает гибридный автомобиль плагин (plug-in)? В чем его принципиальное отличие от других гибридов? В розетке! Аккумуляторы таких машин заряжаются от сети. Они имеют большую емкость и питают достаточно мощный электромотор. Такие гибриды позволяют совершать короткие поездки (несколько десятков километров) на электрической тяге. Дальше — опять бензин! Казалось бы, ДВС в любом типе гибрида остается главным двигателем, но… Существуют последовательные плагин — гибриды. По сути это электромобили, которые везут зарядную станцию на базе небольшого ДВС. Они могут проехать пару — тройку сотен километров на заряде от розетки, а бензиновый мотор, подпитывая аккумулятор, позволяет увеличить этот пробег вдвое. Здесь то точно доминирует электрический двигатель.
Особенности устройства гибрида
Рассмотрим некоторые особенности гибридных автомобилей. Микрогибриды не в счет. Они, как мы решили, и не гибриды вовсе. Не станем касаться конструктивных схем и компоновок — их множество и о некоторых мы уже сказали выше. У всех гибридов два двигателя — бензиновый и электрический. Дизельные моторы на легковых гибридах почти не применяются. Дизель дороже бензинового мотора, требует более сложной системы нейтрализации выхлопных газов. Дизельный гибрид, и так не дешевый, еще вырастет в цене. Гибридные машины популярны в Соединенных Штатах, где дизель — удел тяжелых грузовиков. Принципиальных проблем в создании дизельного гибрида нет. Только рынку этого не надо. А если нет спроса, нет и предложения. У гибридов два аккумулятора — тяговый и обычный, для питания бортовой сети. Все гибридные машины оснащены достаточно сложной электронной системой управления. Подавляющее большинство таких автомобилей имеют автоматическую трансмиссию — планетарную или вариатор. С «автоматом» проще совмещать работу двух моторов. Существуют гибриды «на ручке», но это редкость. Получается, что в любой гибрид инженеры должны «упаковать» два автомобиля — бензиновый и электрический. Два мотора со всеми сопутствующими системами, бензиновый бак и батарею. Причем чем гибрид более «электрический» тем он сложнее, тяжелее и дороже.
Преимущества и недостатки гибридных авто
В чем основные плюсы гибридных автомобилей? Прежде всего они экономичны и экологически более чисты. Для того и создавались. Чем меньше топлива сгорает в цилиндрах ДВС — тем меньше вредных выбросов попадает в атмосферу. Чем больше гибрид может проехать на электрической тяге — тем они экономичней и чище. Из этих преимуществ и вырастают основные недостатки таких машин. Это вес и цена. Хотите экономить топливо — платите за емкую и дорогую батарею. Проблема высокой цены, характерная для электромобилей, естественно, коснулась гибридных машин.
Перспективы автомобилей — гибридов
Сегодня производятся все перечисленные выше типы гибридных машин, от мягких до плагинов. Это говорит о том, что ни производители, ни потребители еще не знают, какой вид гибрида нужен рынку. И нужен ли? Конечно, развитие автомобилей такого типа будет продолжено. Двигатели внутреннего сгорания станут более экономичными и «зелеными» — гибриды их получат. Будет совершенствоваться электроника и алгоритмы управления гибридной силовой установкой. Обязательно появятся новинки в электрической части. Это позволит двухмоторным машинам становиться все более продвинутыми. Но это малые шаги. Реальный прорыв даст только создание новых типов аккумуляторов. Электромобили сегодня в тренде. Лучшие умы, большие деньги и основные силы брошены на их совершенствование и продвижение. Если, в итоге, удастся создать аккумуляторную батарею, которая обеспечит гарантированный длительный пробег, быструю зарядку, стабильность работы при любой температуре, кому будет нужен более сложный и менее «зеленый» гибрид? Случится это завтра или через много лет — неизвестно. А пока гибридные автомобили заняли рыночную нишу, уверенно там себя чувствуют, развиваются и совершенствуются.
РАЗЛИЧНЫЕ ТИПЫ ГИБРИДНЫХ И ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ | ДОБРО ПОЖАЛОВАТЬ
Информация о посещаемости сайта и файлы cookie
Мы используем файлы cookie (и эквивалентные технологии) для сбора и анализа информации о работе нашего сайта и обеспечения его функционирования. Файлы cookie также позволяют нам и третьим лицам настраивать рекламу, которую вы видите при посещении нашего сайта и других сторонних веб-сайтов в той же онлайн-сети, включая социальные сети. Нажимая «Согласен», вы соглашаетесь на такое использование файлов cookie. Если вы не согласны или хотите получить дополнительную информацию, вы можете изменить настройки файлов cookie, нажав на предоставленную ссылку.
Управление настройками файлов cookie
Мы создали простое руководство, чтобы помочь понять различные типы гибридов, которые вы встретите сегодня на дороге.
Гибридные двигатели отличаются от двигателей обычных автомобилей. Это оказывает давление на масло по-другому. Узнайте о различных типах гибридов.
СКАЖИТЕ «ЭЙ» МЯГКОМ ГИБРИДУ
Автомобили с мягким гибридом имеют небольшую электрическую систему, состоящую из двигателя и аккумуляторной батареи, которая заряжается от двигателя внутреннего сгорания во время обычного движения.
Двигатель обеспечивает ускорение трансмиссии, но сам по себе он не способен значительно двигать транспортное средство.
СКАЖИТЕ ПОЛНОМУ ГИБРИДУ «ХАЙ»
Полные гибриды имеют более мощные электродвигатели. Они способны разогнать автомобиль до определенной скорости или до полной разрядки аккумулятора.
Аккумулятор, питающий двигатель, больше, чем у мягкого гибрида. Он обеспечивает значительный запас хода только на электричестве, что делает его идеальным для езды по городу. Аккумулятор заряжается двигателем во время его работы, а в некоторых системах его также можно заряжать с помощью систем рекуперации энергии, таких как рекуперативное торможение.
СКАЖИТЕ ПОДКЛЮЧАЕМОМУ ГИБРИДУ «HY»
Подключаемые гибриды похожи на полные гибриды с мощным электродвигателем или несколькими двигателями, но также имеют большую батарею, которую можно заряжать без использования двигателя.
Двигатели способны самостоятельно перемещать транспортное средство до определенной скорости или до разрядки аккумуляторов. Аккумуляторы, питающие двигатель, обеспечивают значительный запас хода только на электричестве, что делает подключаемый гибрид идеальным для вождения по городу.
Подзарядка аккумулятора путем подключения к бытовой или коммерческой сети обеспечивает дополнительный запас хода без расхода топлива, что еще больше улучшает экономию топлива.
СКАЖИТЕ «HY» ЭЛЕКТРОТРАНСПОРТНОМУ СРЕДСТВУ С УВЕЛИЧЕННЫМ ЗАПАСОМ
Электромобили с увеличенным запасом хода имеют крупную электрическую систему, в которой двигатель или двигатели являются единственным средством передвижения транспортного средства. Первичная зарядка аккумуляторов осуществляется путем подключения к бытовым или коммерческим источникам электроэнергии.
Увеличенный запас хода автомобиля обеспечивается добавлением небольшого двигателя внутреннего сгорания. Двигатель сам по себе не может приводить в движение колеса. Вместо этого он питает генератор для поддержания уровня заряда батареи.
ПОНИМАНИЕ 6 ГИБРИДНЫХ ПРОБЛЕМ
СКОРО: ПРЕДСТАВЛЯЕМ ЛИНЕЙКУ CASTROL «ПРОВЕРЕНО В HYBRID»
Пожалуйста, оцените свой опыт содержания гибридов
Понимание гибридных транспортных средств: 4 основных типа
Хотя почти все слышали о гибридных транспортных средствах, большинство людей на самом деле не знают о различных типах автомобилей, представленных на рынке. В этой статье мы рассмотрим 4 основных типа гибридных автомобилей и опишем, что делает каждый из них уникальным.
Мягкие гибриды
Одной из новейших инноваций в гибридной технологии является «мягкая» гибридная система. Как следует из названия, мягкая гибридная система обычно не приводит автомобиль в движение только за счет электроэнергии. Вместо этого система используется для придания небольшой мощности бензиновому двигателю автомобиля, как правило, при ускорении с полной остановки, а также для облегчения работы энергоемких систем, таких как кондиционер, на бензиновом двигателе. Мягкие гибриды, обычно встречающиеся в виде 48-вольтовых электрических систем, не нуждаются в подключении к сети. Вместо этого батареи заряжаются за счет комбинации мощности от бензинового двигателя и рекуперации энергии при торможении автомобиля (также известное как рекуперативное торможение). ).
Мягкие гибридные системы имеют разные названия, но наиболее распространенными примерами являются eAssist (General Motors), eTorque (Fiat/Chrysler) и EQ Boost (Mercedes).
Полные гибриды
Как и мягкие гибриды, полные гибриды также оснащены как бензиновым двигателем, так и электрическим компонентом. Однако электрический компонент полностью гибридного автомобиля способен выдерживать гораздо большую нагрузку, чем у мягкого гибрида. Большинство полных гибридов могут фактически работать на некотором расстоянии исключительно за счет электроэнергии. Обычно это происходит на более низких скоростях в городе, но это одна из причин, по которой вы можете увидеть, что показатель расхода топлива на галлон в городе у полного гибрида выше, чем показатель расхода на галлон на шоссе (где в стандартных автомобилях с бензиновым двигателем все наоборот).
Когда речь идет о полностью гибридных автомобилях, существует два основных типа силовых агрегатов; Параллельные гибриды и серийные гибриды.
В гибридах Parallel двигатель может приводиться в действие одним из 3 способов: напрямую от двигателя, напрямую от электродвигателя или от обеих систем, работающих вместе.
В гибридной серии колеса приводятся в движение исключительно электродвигателем, а бензиновый двигатель обеспечивает питание для электродвигателя, что-то вроде генератора. Бензиновый двигатель на самом деле никогда не приводит в движение колеса.
С развитием гибридных технологий некоторые транспортные средства работают как комбинация двух (метко названных «последовательно-параллельными» гибридами), при этом бортовой компьютер выбирает наиболее эффективный способ работы в любой момент времени.
Полные гибриды заряжают свою аккумуляторную систему практически так же, как и мягкие гибридные системы, за счет энергии бензинового двигателя, а также за счет рекуперативного торможения.
Подключаемые гибриды
Все гибридные автомобили, которые мы обсуждали до сих пор, заряжают свои аккумуляторы исключительно за счет внутренних средств. Основное отличие подключаемых гибридов заключается в том, что эти автомобили могут заряжать аккумуляторы как от внешних зарядных устройств, так и от внутренних.
SpaceX показали самый мощный однокамерный метановый двигатель за всю историю
Блоги
OptovikЗа пост начислено вознаграждение
Двигатели SpaceX Raptor 2 вышли на новый уровень
рекомендации
Недавно компания SpaceX показали самый мощный однокамерный метановый двигатель в истории.
Жидкостный ракетный двигатель закрытого цикла на жидком метане и кислороде с наименованием Raptor 2(слева) — выдаёт 235 тонн сил, вместо 185 тонн у первой версии (справа). Илон Маск так же добавил, что на испытаниях предельную тягу удалось довести до 247 тонн, а в перспективе возможно добиться 250 тонн. Кроме этого он сообщил, что двигатель Raptor 2 стабильно работает при давлении 300 бар.
Но самое интересное здесь то, что производство одного такого двигателя занимает всего лишь сутки! Это невероятная цифра, с учётом того, что двигатели RS-25, стоявшие на Space Shuttle и на SLS производятся в течении целого года!
рекомендации
33 таких Raptor 2 будут установлены на Super Heavy, что доведёт тягу у ускорителя до сумасшедших 7. 5 тысяч тонн, что более чем в 2 раза превышает тягу Saturn V.
Этот материал написан посетителем сайта, и за него начислено вознаграждение.
#tesla
#илон маск
#spacex
#тесла
Материалы по теме
Эффективная реклама для вашего бизнеса
У Герани может появиться новый «старший брат» из Ирана — дрон камикадзе Араш-2 и не только он
В российских магазинах GeForce RTX 4090 стоит дешевле, чем в США
На Украине рассказали почему боятся гиперзвуковых «Кинжалов»
Золотая кровь: Только один из 6 млн. человек во всем мире имеет такую «универсальную» группу крови
Galaxy S22+ вместо S22 Ultra — как продавцы на маркетплейсах РФ хитрят во время распродаж
Какие ошибки допускают геймеры из РФ при выборе видеокарты – сколько стоит переплата за бренд
Авторитетный инсайдер «подтвердил», что Call of Duty переходит на двухлетний цикл релизов
Накануне большой распродажи 11. 11 AliExpress снизил курс доллара на 3 рубля, а товары подешевели
Калашников сделал для войск РФ помехонаводящий боеприпас 3ВД35
NVIDIA назвала ближайшие релизы и обновления игр с поддержкой DLSS 3 и 2
Дуэйн Джонсон объяснил финал «Чёрного Адама»
Геймер получил в CoD Modern Warfare II две бессрочных блокировки, после чего поехал в офис Activision разбираться
Эксперты ожидают скорого отскока Биткоина к 30000$
Украина получит от США восемь ракетных комплексов средней дальности NASAMS и системы VAMPIRE
После побега рабочих Китай заблокировал территорию вокруг завода по производству iPhone
Подсчеты Greenpeace показали, что переработка пластика не спасет мир от экологических невзгод
Видеокарты RTX 3060 стремительно набирают популярность, а легендарные GTX 1060 уйдут в прошлое
Производители блоков питания выпускают собственные переходники для RTX 4090 и RTX 4080
Производительность Intel Core i5-13400 в одноядерном тесте CPU-Z совпадает с Core i5-12400
Какие ракеты Иран может передать армии России
Последствия и значения ракетных ударов по Украине новейшими ракетами Х-32
Битву производительности Core i9-13900K против Ryzen 9 7950X в играх выиграл Intel
Сравниваем недорогие игровые сборки на четырехъядерных процессорах — у AMD большие проблемы
Актуальный монстр из прошлого, проверяю Radeon R9 290 в современных играх
Как бы развивалось человечество, если бы на Земле не было нефти и газа
США и ЕС могут поставить в Украину десятки зенитно-ракетных комплексов – чем это грозит армии РФ
Как себя чувствует R7 2700X и массивная R9 290 Tri-X в компактном самодельном корпусе
Древние люди могли впадать в зимнюю спячку, посчитали палеонтологи после раскопок в Испании
Конфликт между Россией и Украиной спровоцировал в Европе «ядерный ренессанс», собрав более $400 млн
О лучших игровых адаптациях фильмов
Грозит ли SpaceX банкротство из-за двигателей Raptor
1 декабря 2021, 15:05
Мнение
В СМИ появилась информация о «возможном банкротстве SpaceX» за авторством самого Илона Маска. Как сообщается, во время праздничных дней в честь Дня благодарения основатель компании разослал работникам SpaceX официальное письмо, которое вскоре утекло в Сеть. Вначале его опубликовало не самое известное космическое медиа spaceexplored.com, позже подлинность сообщения подтвердил телеканал CNBC, который получил копию письма от своих источников.
Предлагаю ознакомиться с русским переводом отправленного Илоном Маском сообщения:
«К сожалению, кризис производства двигателей Raptor оказался намного хуже, чем казалось несколько недель назад. Когда мы разобрались с проблемами, возникшими после ухода предыдущего высшего руководства, они, к сожалению, оказались гораздо более серьезными, чем сообщалось. Эту пилюлю не подсластить.
Я собирался взять отпуск в эти выходные, как мои первые выходные за долгое время, но вместо этого я буду на производстве двигателей Raptor всю ночь и все праздники.
Читайте также
Сверяя космические часы: о чем говорили главы национальных агентств в Дубае
Если у вас нет критических семейных дел и вы можете физически вернуться в Хоторн (там находится производство Raptor — прим. ТАСС) — приезжайте. Нам понадобятся все силы, чтобы оправиться от того, что, откровенно говоря, надо назвать катастрофой.
Последствия для SpaceX, если мы не сможем создать достаточно надежных двигателей Raptor, заключаются в том, что мы не сможем использовать Starship, а это значит, что мы не сможем выпускать спутники Starlink второй версии (V2) (у Falcon не хватает ни места под головным обтекателем, ни полезной нагрузки, выводимой на орбиту, необходимых для спутника V2). Сами по себе спутники Starlink первого поколения V1 финансово слабые, а V2 — гораздо сильнее.
Кроме того, мы увеличиваем производство терминалов до нескольких миллионов единиц в год, что потребует огромных капиталовложений, но это сработает, только если спутники V2 будут на орбите, чтобы удовлетворить потребность пользователей в пропускной способности. В противном случае эти терминалы будут бесполезны.
Все сводится к тому, что мы столкнемся с реальным риском банкротства, если в следующем году мы не сможем достичь частоты полетов Starship хотя бы раз в две недели. Спасибо, Илон».
В чем суть проблемы?
Когда компания SpaceX еще только выходила на космический рынок со своей частично возвращаемой ракетой Falcon 9, Илон Маск часто говорил о том, что снижение цены за вывод килограмма полезной нагрузки на орбиту спровоцирует резкое увеличение спроса на пусковые услуги. Соответственно, станет гораздо больше компаний, желающих запустить свои спутники.
Читайте также
Возможно ли сотрудничество: какие взаимные интересы могут быть у SpaceX и Роскосмоса
Цена действительно снизилась, пусть и не так сильно, как обещало руководство SpaceX, вот только это не привело к резкому увеличению количества запускаемых космических аппаратов (к примеру, в 2021 году SpaceX пока осуществила лишь четыре коммерческих запуска, не связанных с государственными заказами). В то же время Маск, чтобы поддержать доходность SpaceX на нужном уровне и начать разработку космической системы Starship, сделал без преувеличения гениальный ход.
Он сам искусственно создал увеличение спроса на услуги компании SpaceX, запустив проект Starlink по обеспечению широкополосного доступа в интернет по всему миру. Для этого требуется «созвездие» из большого количества спутников (более 10 тыс. штук) — проект Starlink начал активно покупать пусковые услуги у SpaceX, а там смогли пустить часть денег на разработку Starship. Это упрощенная схема, в реальности денежные потоки распределяются гораздо сложнее.
Так Starship необходим для Starlink или наоборот? Какая из технологий нужна для завершения работ по другому проекту? На самом деле ответов на эти вопросы нет. Чтобы выводить тяжелые и большие спутники второго поколения Starlink (V2), нужна ракета, подобная Starship (чтобы делать это дешево и быстро), а Starship в свою очередь нуждается в заказах и деньгах от них для завершения своих работ.
Согласно ранее озвученным планам, начало орбитальных пусков Starship должно было бы быть в январе 2022 года, а к концу года Илон Маск надеялся выйти на регулярные запуски за счет многоразовости системы и отсутствия необходимости создавать для каждого запуска новую ракету. Но самым сложным и узким местом системы стали двигатели Raptor, созданные специально для Starship. Компании, видимо, пока не удалось наладить их промышленное производство, да и на испытаниях двигатели пока являются основной причиной аварий.
К тому же недавно производство двигателей покинули сразу несколько руководителей высшего звена. Причиной как раз называются неудовлетворительные результаты по выпуску Raptor.
Читайте также
Стрельба по астероидам, или Для чего нужна планетарная защита
Как признается сам Маск, проблемы на производстве оказались гораздо серьезнее, чем представлялось, что и стало причиной написания письма сотрудникам.
И что теперь?
Тем не менее говорить о банкротстве компании или даже близости к нему пока преждевременно. Илон Маск часто демонстрирует свою импульсивность, а значит, нельзя исключать, что он мог написать это письмо, только чтобы взбодрить и, возможно, даже припугнуть своих сотрудников. В эту же копилку попадает и просьба выйти сотрудников во время праздников — если проблему можно решить всего лишь таким обращением, то вряд ли она ведет к столь серьезным последствиям.
Кроме того, его сообщение можно рассматривать и как некое «плохое рекомендательное письмо» для ушедших сотрудников, которые, очевидно, находятся сейчас в поисках новой работы.
Гораздо интереснее в этом послании то, что Маск высказывает желание достичь частоты полетов Starship раз в две недели, и информация о солидных размерах и весе спутников Starlink второй версии. Но опять же это пока только слова, без цифр — та же частота полетов может описывать планы компании лишь на декабрь 2022 года.
Однако на Starship у компании поставлено действительно многое, и если в течение 2022–2023 годов он не начнет летать на орбиту, как это было заявлено ранее, то у SpaceX будут немалые проблемы как репутационного, так, возможно, и финансового характера.
Пока же в активе Starship только несколько атмосферных полетов, лишь одна мягкая посадка (во многом из-за двигателей Raptor), отмечается неплохая управляемость. Сейчас для компании важнее всего как можно быстрее наладить их промышленное производство, и именно об этом говорит Маск.
Мнение редакции может не совпадать с мнением автора. Цитирование разрешено со ссылкой на tass.ru
Теги:
Маск, Илон
Обзор Ford F-150 Raptor 2023 года, цены и характеристики , непревзойденная проходимость по бездорожью, почему каждый пикап не может ездить так плавно?
Минусы Отвратительный выхлоп V-6, большие счета за бензин, есть предел тому, насколько большим может быть грузовик — и это все.
Вердикт F-150 Raptor — очень интенсивный грузовик, но он удивительно пригоден для повседневного использования, если вы не ожидаете, что он поместится на парковочных местах нормального размера.
Остин Ирвин и Эрик Стаффорд
Обзор
Ford F-150 Raptor — это трофейный внедорожник SCORE, живущий в мире асфальта. У него очень широкие крылья, длинноходная подвеска, большие шины и высокопроизводительный вид гоночного грузовика. Большинство Raptor оснащены двухтурбинным двигателем V-6 мощностью 450 л. с., соединенным болтами с 10-ступенчатой автоматической коробкой передач, и останутся таковыми в 2023 году. версия 5,2-литрового V-8 с наддувом Mustang Shelby GT500, который, наконец, придаст 702-сильному Ram TRX что-то устрашающее, чтобы фыркнуть. В то время как R стандартно поставляется с 37-дюймовыми шинами BFGoodrich K02, стандартная резина для моделей с твин-турбо V-6 имеет размеры 35 дюймов, но 37-е не являются обязательными. Несмотря на огромные размеры Raptor, у него один из самых плавных ходов среди полноразмерных пикапов. Эта длинноходная подвеска, которая специально разработана для поглощения ударов, провалов и прыжков на скоростном бездорожье, удивительно мягкая и прощает ежедневные выбоины и бугристый тротуар. Если оставить в стороне скалы и дюны, установка этого F-150 размера XXL на узкой дороге или на парковочном месте вполне может стать самым большим препятствием для Raptor.
, где этот автомобиль занимает
1
ОЗУ 1500
Начиная с: $ 39 305
2
ОЗУ 1500 TRX
Начало с: 83,150
3
FORD F-1509
. -150 Raptor
ОТ 78 385 долларов США
5
Chevrolet Silverado 1500 ZR2
ОТ 71 545 долларов США
6
GMC Sierra 1500
ОТ 33 200 долларов США 900 000 долларов?
Ford добавляет мегамощный F-150 Raptor R в 2023 году. Raptor R использует 700-сильный 5,2-литровый двигатель V-8 Predator с наддувом мощностью 700 л.с. от Mustang GT500. Внизу 9Задний мост диаметром 0,75 дюйма с блокируемым задним дифференциалом с электронным управлением и передаточным числом 4:10:1 входит в стандартную комплектацию. В то время как 37-дюймовые шины входят в стандартную комплектацию, Ford также оснащает R более жесткими передними пружинами и специально настроенными амортизаторами, чтобы выдерживать дополнительный вес. В стандартную комплектацию Raptor R входят акценты из углеродного волокна по всему салону и обивка из черной кожи и микрозамши передних сидений Recaro.
Цены и какой из них купить
F-150 Raptor
78 385 долл. США
F-150 Raptor R
109 145 долл. США
F-150 Raptor предлагается только с кузовом с двойной кабиной под названием SuperCrew. Несмотря на то, что существует множество отдельных опций и пакетов, мы рекомендуем комплексный пакет 801A High, который состоит из нескольких других пакетов и включает в себя такие функции, как передаточное отношение 4,10, аудиосистему B&O с 18 динамиками, интерьер. рабочая поверхность, подогрев руля, высокотехнологичные системы помощи при буксировке, модернизированные фары, беспроводная зарядка и многое другое. Единственный другой вариант, который мы предлагаем, — это пакет Power Tech, который, в первую очередь, включает в себя бортовой генератор ProPower мощностью 2 кВт.
Двигатель, трансмиссия и производительность
Под новым капотом F-150 Raptor, который теперь оснащен выдающимся отводом тепла, находится знакомая высокопроизводительная версия фордовского 3,5-литрового двигателя EcoBoost с двойным турбонаддувом мощностью 450 л. с. 6. Он дышит через новую 3,0-дюймовую выхлопную систему, которая, как сообщается, усиливает саундтрек V-6 грузовика. Двигатель по-прежнему сочетается с 10-ступенчатой автоматической коробкой передач с подрулевыми лепестками, которая питает все четыре колеса через стандартную систему полного привода. Если вам этого недостаточно, просто подождите. Raptor R — еще более крупный хищник. Он использует 700-сильную версию 5,2-литрового V-8 с наддувом от Shelby GT500, но с крутящим моментом 640 фунт-футов. Каждый Raptor оснащен сложной подвеской, которая включает в себя более крупные амортизаторы внутреннего байпаса и пятирычажную заднюю спиральную пружину. 9Версия 0023, которую мы тестировали. Модель продемонстрировала невероятную тягу и плавность хода грузовика даже на самой сложной местности. Наряду с другими улучшениями шасси, набором 17-дюймовых колесных дисков и стандартным набором 35-дюймовых шин, Raptor также доступен с комплектом 37-дюймовых вездеходных шин BFGoodrich для улучшения углов въезда, выезда и отрыва. а также дорожный просвет, который увеличивается с 12,0 до 13,1 дюйма. В стандартную комплектацию Raptor R входят 37-дюймовые шины BFGoodrich All-Terrain T/A K02.
Подробнее о пикапе F-150 Raptor
Ford F-150 Raptor R с двигателем V-8 Fury
Рев восстановлен: новый F-150 Raptor R оснащен двигателем V-8 мощностью 700 л.с.
Испытано: Ford 2021 года F-150 Raptor на 37-дюймовых шинах
Буксировка и грузоподъемность
F-150 Raptor может буксировать даже больше, чем версия, которую он заменяет. Его максимальная полезная нагрузка и тяговое усилие увеличиваются на 200 фунтов до 1400 и 8200 фунтов соответственно.
Экономия топлива и реальный расход топлива на галлон
Расход F-150 Raptor составляет до 15 миль на галлон в городе и 18 миль на галлон на шоссе. Выбор более крупных 37-дюймовых шин может снизить эти показатели до 14 миль на галлон по городу и 16 миль на галлон по шоссе. Raptor R еще не был сертифицирован EPA. Как только у нас появится возможность протестировать один из них на нашем шоссе со скоростью 75 миль в час, мы сможем оценить его реальные мили на галлон. Для получения дополнительной информации об экономии топлива Raptor посетите веб-сайт EPA . Для получения дополнительной информации об экономии топлива F-150 Raptor посетите веб-сайт 9.0023 веб-сайт EPA .
Интерьер, комфорт и груз
Кабина Raptor имеет ту же планировку дизайна и пассажирское пространство, что и обычный F-150 SuperCrew. Высокопроизводительная версия стандартно поставляется с 12,0-дюймовым цифровым приборным блоком и может похвастаться большим внутренним пространством для хранения вещей, а также, по словам Форда, более качественными материалами. На новом рулевом колесе нанесен логотип с лазерной гравировкой, а на отметке «12 часов» теперь есть оранжевая метка в стиле гоночного автомобиля; видные алюминиевые подрулевые лепестки все еще прячутся за спицами. Наряду со стандартной алюминиевой внутренней отделкой, Raptor доступен с дополнительными элементами интерьера из углеродного волокна и более агрессивными передними ковшами Recaro. Высоколетящий пикап больше не будет предлагаться с удлиненной кабиной (также известной как SuperCab). По крайней мере, версия кабины экипажа SuperCrew предлагает больше места на заднем сиденье. Он сочетается с 5,5-футовым грузовым ящиком.
Разница между автомобилем и водителем
Объяснение результатов комплексного тестирования автомобилей
Почему мы тестируем: каждая цифра рассказывает историю
Информационно-развлекательная система и возможности подключения стандартная информационно-развлекательная система Sync 4 грузовика. Наряду с возможностью взаимодействовать с Amazon Alexa и получать беспроводные обновления, он поддерживает беспроводную связь Apple CarPlay и Android Auto. Мы также ценим то, что Ford включил физические регуляторы громкости и настройки в дополнение к элементам управления на рулевом колесе и голосовым командам. Те, кто хочет улучшить качество звука, могут выбрать звуковую систему B&O с 18 динамиками. Raptor также может быть оснащен полезным мобильным генератором мощностью 2,0 кВт, который установлен в грузовой платформе и может работать с электроинструментами и другим оборудованием.
Как купить и обслуживать автомобиль
Как купить или взять в аренду новый автомобиль
Как купить подержанный автомобиль
Как ремонтировать, обслуживать и ухаживать за автомобилем
Безопасность и помощь водителю Характеристики
Как и обычный F-150, высокопроизводительный вариант предлагает различные технологии помощи водителю . Точно так же у него будут вспомогательные средства, которые облегчат преодоление трассы, в том числе то, что Ford называет Trail Control и Trail 1-Pedal Drive. Оба являются стандартными и действуют как низкоскоростной круиз-контроль для сложных внедорожных ситуаций.
Для получения дополнительной информации о результатах краш-тестов Raptor посетите веб-сайты Национальной администрации безопасности дорожного движения ( NHTSA ) и Страхового института дорожной безопасности ( IIHS ). Ключевые функции безопасности должны включать:
Стандартное предупреждение о столкновении вперед и автоматическое экстренное торможение
Доступный мониторинг слепых зон и предупреждение о перекрестном движении сзади
Доступные предупреждение о выходе из полосы движения и помощь в удержании полосы движения
Гарантия и техническое обслуживание
Хотя Ford не предлагает бесплатное техническое обслуживание, которое есть у конкурентов Chevy , GMC и Toyota , компания предоставляет конкурентоспособную ограниченную гарантию и гарантию на трансмиссию.
Ограниченная гарантия распространяется на три года или 36 000 миль
Гарантия на трансмиссию распространяется на пять лет или 60 000 миль
Бесплатное плановое техническое обслуживание не предусмотрено
Характеристики
Характеристики
Ford F-150 Raptor 2021 Тип автомобиля: переднемоторный, задний/полноприводный, 5-местный, 4-дверный пикап
ЦЕНА
Базовый/протестированный: 65 840 долл. США/78 545 долл. США Опции: группа оборудования 801A, 6150 долларов США; Пакет Power Tech, 1995 долларов США; 17-дюймовые кованые алюминиевые диски с бортовым замком, 1895 долларов; Пакет внешней графики Raptor, 1075 долларов США; Пакет из углеродного волокна Raptor, 995 долларов; спрей в постели, $ 595
ДВИГАТЕЛЬ
с двойным турбонаддувом и промежуточным охлаждением, DOHC, 24-клапанный V-6, алюминиевый блок и головки, порт и непосредственный впрыск топлива Рабочий объем: 318 дюймов 3 , 3496 см 3 Мощность: 450 л.с. при 5850 об/мин Крутящий момент: 510 фунто-футов при 3000 об/мин
60 миль в час: 5,2 с 1/4 мили: 13,9 с при скорости 98 миль в час 100 миль/ч: 14,7 с В приведенных выше результатах не учитывается разворот на 1 фут за 0,3 с. Роллинг Старт, 5–60 миль в час: 6,1 с Top Gear, 30–50 миль в час: 3,2 с Top Gear, 50–70 миль в час: 4,0 с Максимальная скорость (gov ltd): 120 миль в час Торможение, 70–0 миль в час: 214 футов Сцепление с дорогой, 300 футов Skidpad: 0,69 г
C/D ЭКОНОМИЯ ТОПЛИВА
Наблюдаемый: 12 миль на галлон Вождение по шоссе со скоростью 75 миль в час: 18 миль на галлон Дальность действия по шоссе: 640 миль
ЭКОНОМИЯ ТОПЛИВА EPA
Комбинированный/Город/Шоссе: 16/15/18 миль на галлон
2021 Ford F-150 Raptor 37 Performance Package Тип автомобиля: переднемоторный, задний/полноприводный, 5-местный, 4-дверный пикап
ЦЕНА
Базовый/протестированный: 78 695 долл. США/81 285 долл. США Опции: пакет Power Tech (задняя дверь с электроприводом, ступенька и рабочая поверхность задней двери, Pro Power Onboard), 1995 долларов США; напыляемая подкладка, $595
ДВИГАТЕЛЬ
24-клапанный V-6 с двойным турбонаддувом и промежуточным охлаждением DOHC, алюминиевый блок и головки, порт и непосредственный впрыск топлива Рабочий объем: 213 дюймов 3 , 3496 см 3 Мощность: 450 л. с. при 5850 об/мин Крутящий момент: 510 фунто-футов при 3000 об/мин
60 миль в час: 5,2 с 1/4 мили: 14,0 с при скорости 96 миль в час 100 миль/ч: 15,8 с В приведенных выше результатах не учитывается разворот на 1 фут за 0,3 с. Роллинг Старт, 5–60 миль/ч: 6,0 с Top Gear, 30–50 миль в час: 3,1 с Top Gear, 50–70 миль в час: 4,0 с Максимальная скорость (gov ltd): 114 миль в час Торможение, 70–0 миль в час: 200 футов Сцепление с дорогой, 300 футов Skidpad: 0,70 г
C/D ЭКОНОМИЯ ТОПЛИВА
Наблюдаемый: 11 миль на галлон 75 миль в час вождение по шоссе: 16 миль на галлон 75 миль в час по шоссе Запас хода: 570 миль
ЭКОНОМИЯ ТОПЛИВА EPA
Комбинированный/Город/Шоссе: 16/15/18 миль на галлон
C/D ОБЪЯСНЕНИЕ ИСПЫТАНИЙ
Дополнительные характеристики и характеристики
Ford
2023 Transit
Starting at $45,250
C/D Rating
9/10
Ford
2023 F-150 Lightning
Starting at $53,769
C/D Rating
8. 5/10
Ford
2023 Mustang
Начиная с 29 165 долл. США
C/D Rating
8,5/10
Ford
2023 Super Duty
Начиная с 43000 долл.0003
Начиная с 48,195 долл. США
C/D Rating
9/10
FORD
2024 Mustang
Начало с 30 000 долл. США. /10
Ford
2023 Bronco Sport
, начиная с 30 810
C/D Rating
9/10
Ford
2023 Maverick
Начиная с 23 670
C/D Rating
.0003
9/10
Ford
2022 Bronco Raptor
, начиная с 70,095 долл. США
C/D Rating
9/10
Ford
2022 F-150 Lightning
, начиная с $ 4169999000 2
9222 F-150 Dlonning
, начиная с 41,769999999999929 2
9000 2
2022.
8.5/10
Ford
2023 Ford Fusion Active
Стартовая цена от 35 000 долларов США
Реклама – Продолжить чтение ниже
Илон Маск демонстрирует новые ракетные двигатели SpaceX для Starship.
Поклонники Твиттера видят далеков.
Илон Маск поделился этим мнением о партии двигателей SpaceX Raptor 2, ожидающих интеграции в ракету Starship на объекте Starbase компании недалеко от Бока-Чика, штат Техас, 26 апреля 2022 года. (Изображение предоставлено Илоном Маском/SpaceX)
Илон Маск, кажется, очень гордится новыми ракетными двигателями своей компании SpaceX.
На этой неделе Маск продемонстрировал партию новых двигателей Raptor 2 на космической базе SpaceX в Техасе, где они будут использоваться в первом орбитальном полете мегаракеты Starship в конце этого года.
«Ракетные двигатели Raptor 2 на Звездной базе, каждый развивает мощность более полумиллиона фунтов (230 тонн)», — написал Маск (открывается в новой вкладке) в сообщении Twitter во вторник (26 апреля). На фотографии Маска было видно более дюжины новых ракетных двигателей, но его поклонники в Твиттере увидели кое-что другое: злых далеков из «Доктора Кто».
Ракетные двигатели Raptor 2 на Звездной базе, каждый развивает мощность более полумиллиона фунтов (230 тонн) pic. twitter.com/9ixxXXceG326 апреля 2022 г.
Подробнее
«Это был только вопрос времени, когда он начал создавать Далеков», — написал пользователь Твиттера Ричард Неллис (открывается в новой вкладке), поскольку термин «Далеки» стал популярным после фотопоста Маска.
«Оказывается, Илон создал Далеков. Илон И.С. Даврос», — написал Саймон , другой пользователь Твиттера, имея в виду создателя воинов Далеков, которые находятся внутри машин, которые действительно имеют некоторое сходство с соплом ракетного двигателя. .
Это был только вопрос времени, когда он начал строить далеков. pic.twitter.com/YsefAt6DgLA26 апреля 2022 г.
Подробнее
Оказывается, Илон создал далеков. Элон И.С. Даврос. https://t.co/IwA6ID4wsh26 апреля 2022 г.
Подробнее
Новые далеки только что выпали https://t. co/GGV7gY3lec 26 апреля 2022 г.
Подробнее
3
9000 Доктора Далеков . Как вы думаете, похожи ли двигатели SpaceX Raptor 2?
Сначала я подумал, что это кучка далеков pic.twitter.com/zuRzlwYC4l26 апреля 2022 г.
Подробнее
Чтобы было ясно, Элон Маск не создал расу злых воинов, кричащих «Уничтожить!» как они захватывают мир. Raptor 2 станет рабочей лошадкой для ракет SpaceX Starship и их массивных сверхтяжелых ускорителей.
Каждый сверхтяжелый ускоритель будет оснащен 33 двигателями Raptor 2, а корабль Starship будет использовать девять собственных двигателей Raptor 2. Как и старые двигатели SpaceX Merlin на ракетах Falcon 9, Raptor 2 предназначен для многоразового использования, как и корабли Starship и Super Heavy.
Двигатели SpaceX Raptor V1 (слева) и V2 на выставке для СМИ, организованной генеральным директором Илоном Маском на стартовой площадке компании в Южном Техасе, Starbase, 10 февраля 2022 года. (Изображение предоставлено SpaceX)
Related Stories
Raptor 2 работает на жидком метане и жидком кислороде, новом топливе для SpaceX. Ракеты Falcon 9 используют жидкий кислород и ракетный керосин в своих двигателях Merlin.
Компания SpaceX несколько лет разрабатывала двигатели Raptor, в результате чего появился Raptor 2. Он имеет более обтекаемый дизайн по сравнению с первой версией SpaceX Raptor, включая менее сложные трубы и водопроводные линии.
«V1 выглядит как груда спагетти на рождественской елке — много «непонятных» кусочков. V2 значительно упрощен, но в то же время увеличена тяга», — сказал Маск в обновлении Starship от 10 февраля.
Возможно, работа SpaceX по оптимизации Raptor 2 придала ему больше сходства с далековами для фанатов «Доктора Кто» на этой неделе. Тем не менее, некоторые поклонники научно-фантастического шоу были удивлены, что Маск не выбрал другого злодея из «Кто» для подражания.
Я всегда думал, что Илон Маск создаст киберлюдей до того, как далеков. pic.twitter.com/rGGFYoflsq26 апреля 2022 г.
Подробнее
«Я всегда думал, что Илон Маск создаст Киберлюдей, прежде чем он создаст далеков», — написал Geekgirlforever.
Напишите Тарику Малику по телефону tmalik@space.com или подпишитесь на него @tariqjmalik . Следуйте за нами @Spacedotcom , Facebook и Instagram .
Присоединяйтесь к нашим космическим форумам, чтобы продолжать обсуждать последние миссии, ночное небо и многое другое! А если у вас есть новость, исправление или комментарий, сообщите нам об этом по адресу: community@space.com.
Тарик является главным редактором Space.com и присоединился к команде в 2001 году, сначала в качестве стажера и штатного писателя, а затем в качестве редактора. Он освещает полеты человека в космос, исследования и космическую науку, а также наблюдение за небом и развлечения.
Двигатель не греется до рабочей температуры: причины, методы устранения
Автовладельцы часто сталкиваются с проблемой, при которой двигатель не нагревается до рабочей температуры. Обычно обращают на нее внимание не сразу, так как не все знают, чем опасна низкая температура двигателя. Для нормальной работы необходимо 100 градусов.
Вопрос — почему плохо греется движок становится ребром с наступлением холодов, когда в салоне авто не комфортно находиться из-за низкой температуры. Помимо этого, ощутимо увеличивается расход, мотор быстрее изнашивается, машина хуже едет, а в выхлопных газах увеличивается уровень токсичных веществ.
Как прогревается двигатель
Каждый исправный агрегат имеет разное время прогрева. На него влияют:
степень форсирования;
тип мотора: дизель или бензин;
состояние системы охлаждения;
работа печки;
качество тосола или антифриза;
рабочая нагрузка;
температура воздуха снаружи;
тип и вязкость моторного масла.
Особенности масла редко учитываются, однако специалисты считают, что это необходимо. Различные присадки для уменьшения трения и базовая основа, синтетическая или полусинтетическая, влияют на показатели в диапазоне 5–7 градусов. Таким образом, быстрее будет нагреваться мотор на более жидком синтетическом масле.
Стрелка температуры двигателя не поднимается зачастую из-за неисправностей термостата. Именно с этого агрегата всегда начинается проверка системы, если мотор долго прогревается до рабочей температуры.
Принцип работы
Через термостат охлаждающая жидкость (ОЖ) попадает в радиатор. Это большой круг циркуляции жидкости. Открытие термостата происходит обычно при температуре в 100 градусов Цельсия. Если температура не достигла этого предела, то жидкость движется по малому кругу. Неисправность термостата проявляется в неправильном открытии клапанов.
При закрытом термостате двигатель перегревается, а постоянно открытый ведет к низким температурам, так как жидкость будет проходить только по большому кругу.
Из-за нерегулярной смены антифриза или тосола, использования проточной воды или смешивания охлаждающих жидкостей в системе могут скапливаться различные отложения в виде накипи. В таком случае термостат неизбежно будет заклинивать в одном из его положений.
Проверка термостата
Для диагностики неисправности следует обратиться к специалистам на сервисе. Однако проверить термостат можно и самостоятельно. Холодному двигателю дают поработать на холостых оборотах примерно 10 минут. После этого нужно проверить патрубки радиатора. Если термостат функционирует должным образом, то шланги не нагреваются. Температура повышается только в тот момент, когда ОЖ начинает циркуляцию по большому кругу.
Охлаждающая жидкость попадает в большой круг только после достижения рабочей температуры. Если патрубки начинают греться до указанного момента, следует немедленно обратиться к мастеру для дальнейшей диагностики и устранения неисправности. А также существуют более профессиональные способы диагностики при помощи специальных датчиков. Провести такую проверку можно на СТО.
Если устройство открывается и закрывается не полностью, то может произойти частичный перегрев или же температура будет подниматься, но очень медленно. Также клин может наблюдаться лишь периодически.
Любой указанный дефект нуждается в тщательном обследовании и ремонте. Если у вас нет необходимых навыков и минимальных знаний о внутреннем строении автомобиля, стоит обратиться к квалифицированным специалистам автосервиса.
Чтобы снять термостат, необходимо предварительно избавиться от жидкости в системе. Важно дождаться того момента, когда вся система остынет, прежде чем приступать к замене детали. Снимать термостат достаточно просто, для этого достаточно открутить три болта, расположенные на крышке и извлечь ее вместе с термостатом.
Учитывая все особенности конструкции данной модели можно провести ее замену на идентичный или подходящий аналог. Известные бренды выпускают агрегаты, которые могут взаимозаменяться, так что с подбором не возникает трудностей. В любом случае все манипуляции должны осуществляться человеком, который точно знает, что необходимо делать, учитывает марку, год выпуска, пробег автомобиля.
Очень важно учитывать, что стоимость данной детали достаточно низкая, поэтому целесообразнее будет ее замена, чем ремонт. Таким образом, можно избавиться от проблем с низкой температурой двигателя на весь зимний сезон.
Так как при замене термостата придется сливать жидкость, стоит проверить двигатель на работоспособность перед началом зимнего сезона. Многие автовладельцы заливают антифриз в систему, а затем сталкиваются с необходимостью замены агрегата, следовательно, дважды платят за охлаждающую жидкость.
Чем может быть опасен холодный движок
Если вы замечаете, что не прогрет двигатель до рабочей температуры, и она не может подняться, то следует начать немедленный поиск неисправности, так как последствия могут привести к серьезным тратам на ремонт.
Электронный блок управления, установленный на современных авто, распознает непрогретый двигатель как холодный. Если он не может прогреться и не поднимается температура двигателя, то подается переобогащенная смесь.
Когда системе приходится работать в таком режиме, из строя выходят свечи зажигания из-за появления на них и на внутренних элементах нагара. Таким образом, можно заметно снизить срок эксплуатации и столкнуться с капитальным ремонтом, который стоит немалых денег.
Если не прогревается двигатель до рабочей температуры, следует немедленно обратиться в автосервис для диагностики проблемы, чтобы в будущем не возникало подобных неисправностей.
Влияние моторного масла
Как известно от качества масла зависит работа двигателя. Именно от этого будет зависеть и степень нагрева мотора, особенно зимой. В зависимости от того, какое масло используется (синтетика или полусинтетика) может по-разному нагреваться мотор, а диапазон колебаний температуры охлаждающей жидкости будет составлять от 5 до 20 градусов.
В зависимости от того, насколько жидкая моторная смазка будет зависеть то, насколько хорошо и быстро будет запускаться двигатель зимой, а также степень быстроты его нагрева. Поэтому рекомендуется заливать только качественное масло в мотор перед зимой.
Другие причины
Неисправность термостата может быть не единственной причиной, по которой двигатель не набирает рабочую температуру.
Если во время предыдущего ремонта не были хорошо затянуты патрубки, автовладелец сталкивается с подсосом воздуха. Охлаждающая жидкость начинает подтекать. Если проблема в этом, то следует затянуть хомуты для более плотного прилегания трубок и долить жидкость до необходимого уровня в расширительном бачке.
В таком случае на приборной панели автовладелец увидит низкую температуру, недостаточную для работы. На самом же деле двигатель будет перегреваться и может даже закипеть.
В зимнее время года на работу двигателя также влияет использование других систем. Так использование отопителя салона, может привести к тому, что двигатель будет плохо греться, поскольку печка забирает части тепла на себя. При этом будет видно, как падает стрелка указателя температуры двигателя.
Неисправный датчик температуры может вызвать ощущение, что долго греется двигатель или вовсе не может нагреться. При этом двигатель работает исправно. Датчик передает данные о состоянии температуры на приборную панель. Если он работает некорректно, то и показания будут неверными. Замена этой детали приведет все показатели в норму.
Проблема с датчиком достаточно серьезна на современных автомобилях, оснащенных электроникой. Здесь снова придется столкнуться с подачей переобогащенной смеси и заменой множества других деталей.
Любая возникшая проблема должна решаться при помощи компетентного специалиста. При отсутствии необходимых знаний и навыков, стоит обратиться в автосервис. Опытные мастера помогут устранить неисправность и предотвратить ее появление в будущем.
Почему долго прогревается двигатель — Блог
Чтобы выяснить и устранить причины, из-за которых долго прогревается двигатель вашего автомобиля, надо усвоить одну особенность. А именно — прогреваем мы не столько сам двигатель, сколько жидкость в системе охлаждения. Именно её температура является главным показателем, влияющим и на наш комфорт, и на расход топлива, и на стабильность работы силового агрегата. Соответственно, любые проблемы с долгим прогревом (как и с перегревом) всегда связаны с неисправностями или особенностями работы системы охлаждения.
Зачем вообще прогревать двигатель автомобиля?
Причины долгого прогрева мотора
Как ускорить прогрев двигателя за 10 шагов?
Как она устроена и работает?
Системы охлаждения большинства автомобилей проектируются по следующему принципу:
Водяная рубашка — в неё «одеты» цилиндры, и представляет она собой полости, пустоты и каналы, по которым циркулирует охлаждающая жидкость. Водяной называется потому, что раньше в системах охлаждения использовали не антифризы с тосолами, а обычную воду.
Помпа — насос, который прокачивает охлаждающую жидкость по системе охлаждения, приводится в действие от коленчатого вала. Соответственно, чем выше обороты, тем больше антифриза она перегоняет.
Радиатор печки — вместе с рубашкой являются малым контуром системы охлаждения. Сам радиатор служит для прогрева салона автомобиля за счёт теплоты, отобранной у работающего мотора.
Расширительный бачок — условно тоже относится к малому контуру, служит для заливания в систему рабочей жидкости, контроля её уровня и удаления воздуха.
Радиатор — расположен в передней части подкапотного пространства для того, чтобы набегающий поток воздуха обдувал его во время движения автомобиля. При медленной езде этого потока не хватает, потому для принудительного охлаждения предусматривается вентилятор (один или два). Радиатор вместе со всеми вышеперечисленными узлами считается уже большим контуром системы охлаждения.
Термостат — разделяет малый и большой контуры, и служит для своевременного дозированного сброса перегретой охлаждающей жидкости в радиатор для охлаждения.
Устройства для контроля температуры — к ним относится температурный датчик, стрелка и (не всегда есть) контрольная лампа. Датчик установлен в малом контуре и находится в непосредственном контакте с охлаждающей жидкостью. Стрелка показывает на панели приборов условную температуру охлаждающей жидкости, а шкала под ней обычно разделена на три сектора — холодный, нормально прогретый и перегревающийся мотор. Есть также цифровые указатели, которые отображают конкретную температуру в Цельсиях. Аварийная лампа, если есть, загорается при критическом перегреве мотора.
Всё в комплексе это работает следующим образом. Пока двигатель (ОЖ) холодный, термостат закрыт, а значит охлаждающая жидкость через основной радиатор не циркулирует. Она прокачивается помпой через водяную рубашку и радиатор печки. Когда температура достигает рабочей (около 75…85 градусов), термостат приоткрывается, стравливая горячую жидкость в основной радиатор, откуда она возвращается обратно уже охлаждённой. Если машина, например, стоит в пробке, и набегающего потока воздуха нет, антифриз в радиаторе охлаждается принудительно за счёт вентилятора. Он включается автоматически по сигналу датчика при температуре 100…110 градусов по Цельсию.
Зачем вообще прогревать двигатель автомобиля?
Несмотря на то, что необходимость прогревать холодный двигатель давно и многократно обоснована, на этот вопрос до сих пор смотрят по-разному. Одни считают, что прогревать не надо. Другие никогда не начинают ехать, не прогревшись. Есть и третья категория автолюбителей, которые греют мотор только зимой.
В целом, если машина исправна, то двигаться она может и на непрогретом двигателе. Но, при этом:
Расходуется больше топлива.
Двигатель работает нестабильно.
Обороты повышаются вяло.
Мощность и крутящий момент занижены.
Зимой в салоне холодно.
Стёкла запотевшие, и обмёрзшие.
Машина подёргивается и даже глохнет.
А ещё есть мнение, что нагрузка холодного мотора немного сокращает его ресурс. Так ли это, здесь разбирать не будем. Наша задача — выяснить, почему двигатель долго прогревается, и как ускорить этот процесс.
Причины долгого прогрева мотора
Здесь рассмотрено 8 возможных причин, из-за которых мотор прогревается дольше положенного. А в некоторых случаях не достигает нормальной рабочей температуры никогда. После разбора причин и методов их вычисления среди прочих даны советы, как ускорить прогревание любого автомобильного ДВС.
Двигатель — дизельный
Если на машине установлен дизельный мотор, то он априори должен прогреваться дольше, чем бензиновый или работающий на газу. Связано это не с температурой сгорания топлива, как многие думают, а с конструктивными особенностями. Дизельные двигатели проектируются с учётом более высоких нагрузок, которым подвергается силовой агрегат из-за способа воспламенения топливовоздушной смеси. Здесь она взрывается от давления, что приводит к резкому высвобождению энергии и, как следствие, к повышенным нагрузкам. Чтобы дизель выдерживал эти нагрузки, его детали делаются более массивными, чем в бензиновых ДВС. А чем массивнее детали, тем дольше они прогреваются.
Ещё следует учитывать, что дизеля в среднем работают на более низких оборотах, чем бензиновые ДВС. А это означает, что в единицу времени в них выделяется разное количество теплоты.
Что касается температуры горения топлива, то она примерно одинаковая что для бензина, что для солярки — около 1100 градусов. То есть, на скорость прогрева никак не влияет. Более того, температура горения сжиженного газа, на который переводятся бензиновые моторы, составляет около 800…900 градусов, но из-за этого время прогрева не увеличивается.
Несмотря на то, что дизель в плане прогрева — это приговор, с которым придётся смириться, ускорить сей процесс, всё же, возможно. Но об этом позже.
Неисправен датчик температуры ОЖ
Это хоть и «детская» причина, но у многих и она вызывает вопросы. Когда неисправен датчик температуры ОЖ, стрелка на панели приборов упорно не хочет подниматься, и владелец автомобиля думает, что двигатель долго прогревается. На самом же деле мотор может работать в нормальных температурных режимах. Просто на панели приборов этого не видно.
Выявить неисправность температурного датчика крайне просто. Например, если печка после нескольких минут работы дует горячим воздухом, а стрелка «лежит», значит система контроля неисправна. Есть и более сложный, но точный метод. Он заключается в измерении фактической температуры ОЖ внештатными приборами. Например, мультиметром с термопарой и режимом измерения температуры. Примотайте термопару к патрубку системы охлаждения где-то между термостатом и салоном, запустите двигатель, и наблюдайте за тем, как изменяется температура. Если она достигла хотя бы 75 градусов, а на панели приборов без изменений — неисправны либо датчик, либо стрелка.
Грязный радиатор печки
Эта причина относится к случаям, когда печка долго не начинает дуть тёплым воздухом, а горячего от неё дождаться вообще невозможно. Сам же мотор может нормально прогреваться. Более того, и в радиаторе печки присутствует горячий антифриз. Но из-за того, что он засорён, отобрать и перенести это тепло в салон не получается.
Как проверить? Аналогично предыдущему — надо измерять фактическую температуру ОЖ внештатными приборами. Если мотор прогревается до 75 градусов и выше, а в салоне всё равно дубарь, с радиатором печки явно есть проблемы.
Нет прогревочных оборотов
Прогревочные обороты — это принудительное повышение оборотов холостого хода. Выполняют они три функции. Во-первых, ускоряют прогрев мотора за счёт увеличения количества теплоты, выделяемого в результате сгорания топлива за единицу времени. Во-вторых, увеличивают производительность помпы системы охлаждения, за счёт чего она быстрее прокачивает прогретый антифриз из рубашки в радиатор печки. В-третьих, прогревочные обороты способствуют увеличению производительности системы смазки — коленвал лучше раскидывает холодное масло, а маслонасос быстрее прокачивает его в верхнюю часть двигателя к ГРМ.
В карбюраторных ДВС за прогревочные обороты отвечает «подсос» — принудительное обогащение топливовоздушной смеси путём ограничения доступа воздуха в смесительную камеру карбюратора. В инжекторах за это отвечает ЭБУ, который ориентируется на датчики (ДТ, ДМРВ, ДТОЖ) и отдаёт соответствующие команды на клапан холостого хода (КХХ).
Проверить отсутствие прогревочных оборотов проще простого — без низ холодный мотор сразу после запуска работает на оборотах 850…950 об/мин. Если прогревочные обороты есть, то после запуска они повышаются до 1100…1200 об/мин, и по мере прогрева снижаются до минимальных.
Грязная водяная рубашка
Если в электрочайнике накипь увеличивает время закипания воды для чая, то в ДВС эта проблема приводит увеличению времени прогрева охлаждающей жидкости до рабочей температуры. Отложения на стенках водяной рубашки могут снижать эффективность теплообмена на 30%. Это не только увеличивает время прогрева, но также пагубно сказывается на ресурсе мотора, так как после прогрева излишнее тепло отводится от него недостаточно хорошо и быстро.
Есть много признаков грязной водяной рубашки, главным из которых остаётся долгий прогрев. Дополнительные симптомы — дует еле тёплым печка, часто включается вентилятор радиатора, стрелка на панели приборов ведёт себя иногда неадекватно.
Воздух в системе охлаждения
Система охлаждения работает благодаря тому, что по ней постоянно циркулирует охлаждающая жидкость. Если на её пути есть воздушные пробки, циркуляция ухудшается или блокируется полностью. Чаще всего это приводит к перегреву двигателя. Тем не менее, прогреваться медленнее из-за завоздушивания системы он тоже может.
Дополнительные, но не 100-процентные, симптомы воздуха в системе — шипение, бульканье, вибрации.
Неисправен термостат
У термостата бывает две неисправности, из-за которых двигатель долго прогревается:
Заклинило в открытом положении. При такой поломке разделение малого и большого контуров пропадает, а значит охлаждающая жидкость постоянно циркулирует по всей системе, включая основной радиатор. В результате то, что нагревает двигатель, тут же охлаждается в радиаторе. Термостат отчасти для того и придуман, чтобы заблокировать для непрогретой охлаждающей жидкости путь к радиатору. В свою очередь, это простое решение позволяет поддерживать оптимальные температурные условия для двигателя, при которых он работает экономичнее, стабильнее и дольше.
Слишком рано открывается. Такое бывает как из-за износа термостата, так и в случаях, когда он подобран для автомобиля неправильно. Ну или попался брак. Какая бы причина не была, итог один и тот же — прогреваемая двигателем охлаждающая жидкость начинает стравливаться в радиатор раньше, чем достигается нормальная рабочая температура.
Проверка термостата — это отдельная большая тема. Если вкратце, то есть три способа диагностики. Не снимая термостат с машины, можно измерить и сравнить температуру малого и большого контуров системы охлаждения во время прогрева холодного двигателя. Также можно снять термостат, и увидеть наглядно, заклинило его открытым, или нет. Третий способ — «кипячение» термостата в кастрюле с градусником с целью определить точно, как он себя ведёт, и при каких температурах.
Низкая температура окружающего воздуха
Эта причина является не поломкой, а почти непреодолимым фактором, увеличивающим время прогрева двигателя. Во-первых, в момент старта температура металла, масла и антифриза существенно «дальше» от заветных 75…90 градусов. Во-вторых, в процессе прогрева часть накапливаемого системой охлаждения тепла тут же рассеивается в окружающую среду. В совокупности это значительно увеличивает время прогрева даже полностью исправного ДВС.
Как ускорить прогрев двигателя за 10 шагов?
Независимо от того, какой на вашей машине двигатель — бензиновый, дизельный, на газу — ускорить его прогрев можно несколькими способами.
Шаг 1. Проверьте датчик температуры
Если он врёт, то долгий прогрев (который вы видите на панели приборов) — это только полбеды. С неисправным датчиком температуры можно прозевать и перегрев двигателя, что может закончиться очень дорогостоящим ремонтом. Проверить его очень просто. Для этого надо измерить фактическую температуру охлаждающей жидкости. Приборы можно использовать самые разные — мультиметр с термопарой, пирометр, тепловизор… Если стрелка на приборной панели показывает то, что далеко от действительности, значит датчик температуры вышел из строя, и его следует заменить.
Шаг 2. Очистите радиатор печки
Это достаточно муторная процедура, так как находится этот радиатор глубоко под передней панелью в салоне. Чтобы до него добраться, надо, как говорится, «раскидать» полсалона. Тем не менее, эффект от такого ремонта в 99% случаев положительный. Даже если до этого всё было нормально, после чистки радиатора печки станет ещё лучше. Например, чтобы прогреть салон до комфортной температуры зимой, не надо будет включать вентилятор на всю мощность, создавая дикий шум и ветер.
Шаг 3. Восстановите прогревочные обороты
Инжекторные двигатели болеют этим недугом поголовно. Виноватым может быть как ЭБУ (электронный блок управления, мозги), хотя чаще сбои происходят из-за какого-то датчика или клапана холостого хода. Начинать надо всегда с последнего — КХХ можно попробовать почистить, проверить напряжения на его клеммах, либо заменить на заведомо исправный. Подойдёт даже такой нехороший способ, при котором в магазине покупается новый КХХ, аккуратно устанавливается и, если ничего не поменялось — сдаётся обратно, с понтом, что не подошёл…
Шаг 4. Промойте систему охлаждения
Для этого надо слить имеющуюся охлаждающую жидкость, а вместо неё временно залить дистиллированную воду с добавлением лимонной кислоты. Оптимальные пропорции — 70…100 грамм порошка на 1 литр воды. С такой охлаждающей жидкостью надо поездить несколько часов, давая двигателю нормально прогреваться. После с системы сливается грязная мутная жижа, а вместо неё заливается новенький антифриз.
Шаг 5. Удалите воздух из системы охлаждения
Самый простой способ удаления воздуха из системы охлаждения ДВС предусмотрен её конструкцией. Автомобиль надо установить так, чтобы заливная горловина оказалась как можно повыше. Она может быть как на расширительном бачке, так и на основном радиаторе. Далее с горловины скручивается крышка (безопаснее, когда мотор холодный), двигатель запускается, немного прогревается, и должен поработать несколько минут, включая принудительное повышение оборотов. Последнее нужно для того, чтобы увеличить эффективность помпы, и с большей вероятностью протолкнуть все воздушные пузыри к расширительному бачку. Следите за уровнем охлаждающей жидкости, доливая её при необходимости.
Когда перестанет «булькать», заглушите двигатель, и дайте ему остыть, после чего долейте антифриз до уровня и заверните крышку расширительного бачка или радиатора.
Шаг 6. Приведите в порядок термостат
Как правило, если термостат неисправен — заклинило в каком-то одном положении, открывается рано, закрывается поздно и так далее — то его можно только заменить на новый. Восстановлению данная запчасть не подлежит.
Шаг 7. Принудительно повышайте обороты при прогреве
Особенно, если так и не удалось пока что «найти прогревочные обороты». Во время прогрева добавляйте оборотов педалью газа. Но не газуйте, как гонщики перед стартом, а просто поддерживайте обороты на стабильных 1100…1200 оборотах, периодически сбрасывая на минимальный ход. Этот метод очень помогает ускорить прогрев двигателя, а также повышает значительно эффективность системы смазки ДВС.
Если прогревочные обороты есть, и они держатся достаточно долго, то этот шаг пропустите.
Шаг 8. Нагрузите мотор
Нагруженный мотор прогревается быстрее, так как под нагрузкой он сжигает больше топлива и выделяет больше теплоты за единицу времени. Стоя на месте, нагрузить мотор можно за счёт генератора. Включите весь свет, который есть, обогреватели стёкол, музыку (если мороз, то сразу не громко, так как есть риск повредить задубевшие динамики). В результате этих действий генератор начнёт сильнее сопротивляться двигателю, и за счёт этого время прогрева может сократиться процентов на 20…30.
Шаг 9. Не включайте вентилятор печки
Несмотря на то, что радиатор печки во много раз меньше, чем основной, он тоже довольно эффективен в плане отбора тепла у охлаждающей жидкости. То есть, если вы запустите мотор, и сразу же включите вентилятор печки на средние или максимальные обороты, теплее в машине не станет, и конденсат со стёкол не уйдёт, а вот двигатель прогреваться будет дольше на 30…40%.
Шаг 10. Прогревайте двигатель на малом ходу
Этот метод ускорения прогрева ДВС достаточно спорный, но при определённых обстоятельствах пользоваться им можно. Заключается он в том, что машина прогревается не на месте, а почти сразу же после запуска двигателя начинается движение на первой-второй передачах. Что это даст? Во-первых, чтобы ехать, вам так или иначе придётся повышать обороты. А как это ускоряет прогрев, уже сказано выше. Во-вторых, «толкание» автомобиля является нагрузкой для двигателя, что тоже ускоряет его прогрев.
Применять этот метод не стоит, если:
стёкла запотевшие, или обмёрзшие;
двигатель работает крайне нестабильно;
в силу места стоянки машины вам сразу после выезда приходится резко ускоряться, чтобы не мешать потоку.
Что касается нагрузки, которую испытывает непрогретый двигатель при движении автомобиля на первой-второй передачах, то она не критичная. То есть, ресурс мотора из-за такой эксплуатации сколь-либо значительно не сократится.
Итоги
В 90% случаев долгого прогревания двигателя виновата система охлаждения. Поэтому поиск и устранение причин надо всегда начинать с неё. Дополнительно стоит учитывать тип двигателя, современность автомобиля (более новые греются по ряду причин быстрее) и погодные условия. В тёплое время года долгий прогрев вообще проблемой не является. А вот зимой или в сырую погоду непрогретый мотор — это некомфортно, дороже по топливу, и даже опасно.
Холодная правда о прогреве автомобиля зимой
Водители должны прогревать свой автомобиль не более 30 секунд в среднем в зимний день, чтобы сократить расход топлива, загрязнение окружающей среды, повреждение двигателя и запотевание стекол .
В морозный зимний день принято заводить машину за несколько минут до выезда, чтобы прогреть двигатель. Но это миф. В этом нет необходимости, и во многих штатах сейчас действуют законы против холостого хода, чтобы удержать людей от этой привычки.
С приближением зимы приложение Jerry для сравнения страховок и брокеров развенчивает мифы, связанные с прогревом автомобиля.
Миф 1. Прогреть машину в холодный день несложно
На самом деле это так! Слишком долгий прогрев автомобиля приводит к трате бензина, загрязнению окружающей среды и может повредить двигатель.
Отходы топлива
Для автомобилей моложе 30 лет вам потребуется не более 30 секунд, чтобы прогреть двигатель, в противном случае работа на холостом ходу приведет к пустой трате топлива.
Сегодня электронные системы впрыска топлива используют датчики для расчета количества газа и воздуха, необходимого для закачки в двигатель, чтобы он запустился, в зависимости от температуры. Поскольку это происходит автоматически, большинство автомобилей получают ровно столько бензина, сколько необходимо для движения при запуске двигателя. Если вы ждете пять минут, пока двигатель «прогреется», в ваш двигатель закачивается дополнительный бензин — без всякой причины.
Одно исследование, проведенное правительством Канады в холодную погоду, показало, что всего пять минут работы на холостом ходу увеличивают общий расход топлива вашего автомобиля на 7–14%. Работа на холостом ходу в течение десяти минут означает увеличение потребления топлива с 12 до 19%.
Загрязнение
Работа на холостом ходу в холодный зимний день также наносит вред окружающей среде. Исследование энергетического сектора, проведенное в 2009 году, показало, что автомобилей, работающих на холостом ходу, составляют поразительные 1,6% выбросов парниковых газов в США , половина из которых приходится на работу на холостом ходу в холодную погоду.
Эта цифра вдвое превышает количество выбросов, вызванных всей сталелитейной и металлургической промышленностью!
БОЛЬШЕ : 7 зимних предметов первой необходимости, которые нужны каждому водителю
Вред двигателя
Наряду с расходом топлива и загрязнением окружающей среды, работа двигателя на холостом ходу более 30 секунд может нанести вред двигателю.
Если в газовоздушной смеси, запускающей двигатель, содержится больше газа, чем необходимо, избыток бензина может удалить масло из двигателя . Это уменьшает смазку двигателя, что приводит к большему и более быстрому износу.
Key Takeaway Если вашему автомобилю меньше 30 лет, ограничьте время работы на холостом ходу до 30 секунд.
Миф 2. Чтобы прогреть машину в холодный день, требуется от 5 до 10 минут0004 —не работает на холостом ходу несколько минут.
В то время как двигателям требуется немного больше времени для прогрева и достижения идеальной рабочей температуры в холодные дни, EPA поддерживает рекомендацию 30 секунд. В действительно холодные дни EPA говорит, что вы можете поработать на холостом ходу в течение минуты, но не дольше.
Миф 3. Моему моторному маслу необходимо прогреться, чтобы оно начало течь
Большинство используемых сегодня всесезонных моторных масел рассчитаны на работу при любых погодных условиях до -40 градусов по Фаренгейту, в том числе при запуске.
Агентство по охране окружающей среды утверждает, что в очень холодные дни можно поработать на холостом ходу около минуты, чтобы разжижить моторное масло, чтобы оно текло должным образом. При этом большинство экспертов считают, что запуск автомобиля и плавная езда в течение примерно 15 минут обеспечивает надлежащий поток масла.
Key Takeaway Большинство моторных масел производятся для текучести при экстремально низких температурах, что обеспечивает работу двигателя при запуске автомобиля.
Миф 4. Моему автомобилю нужно прогреться, чтобы предотвратить запотевание стекол
Еще одно распространенное заблуждение состоит в том, что вам нужно дать автомобилю нагреться, чтобы очистить лобовое стекло. На самом деле, верно обратное. Чем дольше машина стоит на холостом ходу, тем запотевают окна !
При прогреве автомобиля влага находит самое холодное место для оседания — обычно это окна автомобиля. Чтобы избежать перегрева автомобиля и запотевания стекол, вот хитрость:
Включите обогреватель автомобиля, чтобы начать очищать окна
Теперь включите обогреватель автомобиля на максимальную мощность, чтобы прогреть воздух в салоне автомобиля
Затем включите кондиционер на максимальную мощность, чтобы втянуть лишнюю влагу в воздух
Затем выключите всю циркуляцию воздуха
Слегка приоткройте окна, чтобы впустить свежий воздух
Это должно решить вашу проблему с запотевшими окнами. Если нет, держите носок, наполненный кошачьим туалетом, рядом с лобовым стеклом, чтобы впитать лишнюю влагу.
Позвольте Джерри найти вашу цену всего за 45 секунд
Без спама · Без длинных форм · Без комиссий
Найдите страховые сбережения (100% бесплатно)
Откуда возник миф о прогреве автомобиля?
Миф о прогреве двигателя в холодный день восходит к старой истине, которая больше не имеет силы. Когда карбюраторы подают газ и воздух в двигатель внутреннего сгорания для запуска автомобиля, холодная погода замедлит испарение бензина, что приведет к его конденсации на стенках впускного коллектора и лишит двигатель топлива. Результат? Заглохший двигатель.
В настоящее время (и с середины 1980-х годов) большинство новых автомобилей имеют электронные системы впрыска топлива вместо карбюраторов, которые автоматически рассчитывают, сколько газа и воздуха нужно впрыснуть в двигатель автомобиля, чтобы он завелся, в зависимости от температуры.
Это означает, что при запуске двигателя большинство автомобилей готовы к поездке в любую погоду — нет причин «прогревать» машину, кроме как для обеспечения комфорта.
Если вы ездите на автомобиле старше тридцати лет, и до сих пор «прогреваете» свой автомобиль, спросите производителя о том, как правильно завести свой автомобиль в мороз.
Key Takeaway : Электронные системы впрыска топлива регулируют количество газа и воздуха, поступающих в двигатель, в зависимости от температуры, устраняя необходимость прогрева двигателя вашего автомобиля.
БОЛЬШЕ : Езда по снегу: 7 советов по безопасности зимой
Что мы получаем, не работая на холостом ходу
В исследовании 2009 года сделан вывод о том, что сокращение ненужного холостого хода сэкономит американцам колоссальные 5,9 млрд долларов на расходах на топливо.
Это окажет огромное влияние на планету. В том же исследовании утверждается, что выбросы, уменьшенные за счет повсеместного сокращения холостого хода, превзойдут выбросы алюминиевой, кальцинированной соды и известняковой промышленности вместе взятые.
Некоторые муниципалитеты, такие как холодный Миннеаполис, ввели большие штрафы за простаивание более установленного количества времени каждый месяц.
Разминка с Джерри
Если вы последуете совету Агентства по охране окружающей среды и будете работать на холостом ходу не более 30 секунд, вы можете замерзнуть в дороге, но ничто так не согревает сердце водителя, как надежный план страхования автомобиля.
Зарегистрируйтесь у Джерри менее чем за минуту, и это умное приложение брокера по страхованию автомобилей найдет для вас лучший полис по отличной цене. Джерри подпишет вас на новый полис и поможет отменить старый. Никаких форм, никаких телефонных звонков, никаких хлопот!
Лучше всего, пользователи Джерри сэкономить более 800 долларов в год на страховании автомобиля.
«Когда я начал покупать страховку для своей новой машины, я получил примерно 150 долларов. Джерри нашел мне полную страховку за 102 доллара. Это НЕ шутка!» ––Auden D.
Часто задаваемые вопросы
Как долго следует прогревать машину в холодный день?
Большинство автомобильных экспертов говорят, что осторожное вождение в течение примерно 15 минут позволит поднять температуру двигателя вашего автомобиля до оптимального уровня производительности. Если вы решите запустить машину на холостом ходу, EPA рекомендует делать это не более 30 секунд (или минуты в очень холодные дни).
Вредит ли работа двигателя на холостом ходу?
Холостой ход может повредить двигатель. Когда ваша система впрыска топлива закачивает слишком много бензина в работающий на холостом ходу двигатель, избыток газа может лишить ваш двигатель масел, необходимых для его правильной работы. Это может ускорить износ двигателя.
РЕКОМЕНДУЕТСЯ
Не покупали страховку за последние шесть месяцев? Вас могут ждать сотни долларов сбережений.
Джудит перешла на Progressive
Сэкономил
долл. США
725
Ежегодно
Александр переключился на путешественников
$
834
Ежегодно
Annie Switched на Nationwide
.
Опубликовано by Benjamin Jerew Know How
С физиологической точки зрения преимущества прогрева автомобиля очевидны: когда температура падает до однозначных или отрицательных значений, вождение становится некомфортным. С другой стороны, с точки зрения механики, преимущества прогрева автомобиля не так очевидны. Когда на улице холодно, нужно ли прогревать машину? Если да, то как долго нужно прогревать машину?
Очевидные причины для прогрева автомобиля
Обычно первое, о чем мы думаем, это запустить антифриз в двигатель, чтобы вы могли нагреть салон и согреть замерзшие цифры. Если ветровое стекло нуждается в очистке, нет сомнений, что небольшое количество тепла облегчит работу. И все же, кроме земных благ, зачем прогревать машину?
Прогрев автомобиля улучшает сгорание, экономию топлива и производительность. В системе охлаждения двигателя используется термостат для поддержания наиболее эффективного температурного диапазона, обычно около 200 градусов по Фаренгейту. Это рабочая температура, при которой топливо испаряется лучше всего. Многие карбюраторные двигатели, обычно до 1995, не будут работать очень хорошо, если они не прогреты.
Прогрев двигателя также улучшает эффективность смазки и гидравлики. Моторное масло и жидкость для автоматических трансмиссий (ATF) действуют не только как смазочные материалы, но и как гидравлические жидкости. Правда, масло и ATF очень хорошо текут даже при минусовых температурах, но каждый градус помогает им лучше течь, улучшая смазку и предотвращая износ.
Неочевидные причины НЕ прогревать машину
Многие места ввели законы о холостом ходу не потому, что они хотят, чтобы вы замерзли, а потому, что экологические риски гораздо более катастрофичны. Прогрев вашего автомобиля — это пустая трата топлива, генерация чрезмерных выбросов, которые никуда не приведут.
Прогрев автомобиля может увеличить износ двигателя. Как в карбюраторных двигателях, так и в двигателях с электронным впрыском топлива (EFI), обычно выпущенных после 1990 года, требуется дополнительное топливо для компенсации плохого испарения топлива. В некоторых случаях это может привести к промывке цилиндров или разжижению масла, что ускорит износ двигателя.
Преимущества прогрева автомобиля в течение короткого времени
Чего мы действительно хотим, так это лучшей из всех ситуаций. Мы не хотим выбрасывать дополнительные выбросы без причины — холодные двигатели производят избыточные выбросы углеводородов, угарного газа и оксида азота, которые холодные каталитические нейтрализаторы не могут обработать. В то же время никто не хочет отморозить ягодицы в замерзшей машине, так как долго нужно прогревать машину?
Действительно, вам понадобится всего несколько минут, чтобы осознать преимущества прогрева автомобиля. Для смазки, работы гидравлики и испарения топлива достаточно одной-двух минут, чтобы начать движение. Увеличение времени прогрева до пяти минут на самом деле не сильно согревает, но может облегчить очистку ветрового стекла. Чтобы согреться, оденьтесь по погоде и помните, что соскабливания — хорошее упражнение.
Все-таки больше хорошего не значит лучше, так что не прогревайте машину 20 минут. Чтобы двигатель быстрее прогрелся до рабочей температуры, чтобы обеспечить наилучшую экономию топлива, выбросы, производительность и нагрев салона, вам нужно выйти на дорогу, но не торопитесь в течение первых пяти-десяти минут. В минусовую погоду использование обогревателя за пару часов до запуска двигателя дает фору для прогрева.
Ознакомьтесь со всеми деталями систем отопления и охлаждения, доступными на сайте NAPA Online, или доверьтесь одному из наших 17 000 пунктов обслуживания AutoCare в NAPA для планового технического обслуживания и ремонта. Для получения дополнительной информации о том, как долго вы должны прогревать свой автомобиль, поговорите со знающим экспертом в вашем местном магазине NAPA AUTO PARTS.
 Первый тип ионного двигателя, известный как Ионное топливо типа Кауфмана, был разработан в 1960-х Гарольдом Р. Кауфманом, сотрудником НАСА, на основе Duoplasmatron.
Первый тип ионного двигателя, известный как Ионное топливо типа Кауфмана, был разработан в 1960-х Гарольдом Р. Кауфманом, сотрудником НАСА, на основе Duoplasmatron. Этот метод, известный как плазменное топливо, очень похож на принцип работы электродвигателя.
Этот метод, известный как плазменное топливо, очень похож на принцип работы электродвигателя.
 Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи? Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
Почему бы им просто не использовать наименьший возможный шаговый двигатель для прямого вращения червячной передачи?
 Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4).
Современные системы ЧПУ учитывают это в своих профилях перемещения и включают автоматическую компенсацию люфта (например, Mach4). В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
В настоящее время существует 400 двигателей с шагом на оборот, которые фактически повышают точность без каких-либо потерь крутящего момента.
 .. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.
.. даже ходового винта по оси Z может быть обратно-управляемый без излишних усилий.

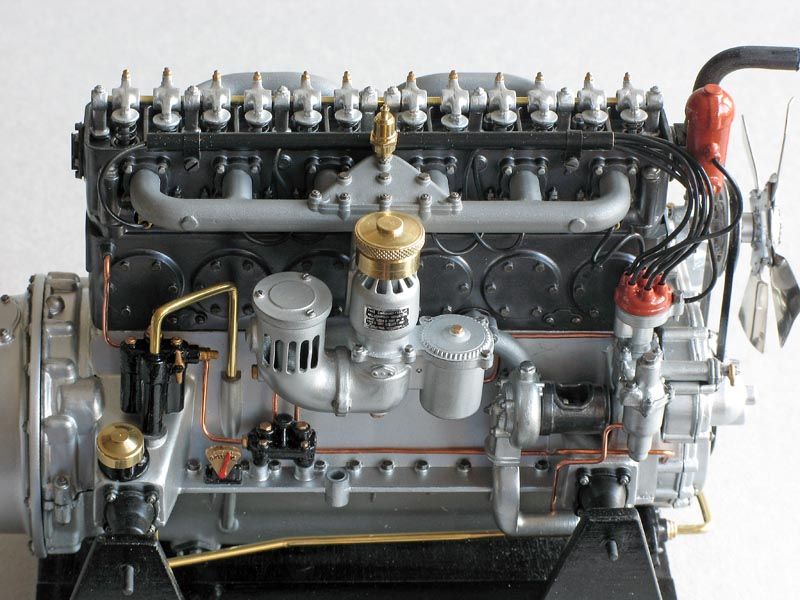 Начав с кусков алюминия, бронзы и нержавеющей стали, он потратил более 1200 часов на проектирование, фрезерование, токарную обработку и сверление того, что, как он утверждает, является «вероятно» самым маленьким двигателем V12 в мире. Приводимое в действие впрыском сжатого воздуха (0,1 кг/кв. см), это маленькое чудо может похвастаться общим рабочим объемом 12 кубических сантиметров благодаря двенадцати поршням диаметром 11,3 мм и работает как шарм. Лучше всего то, что вы можете увидеть, как это происходит, в подробном видео, которое следует ниже.
Начав с кусков алюминия, бронзы и нержавеющей стали, он потратил более 1200 часов на проектирование, фрезерование, токарную обработку и сверление того, что, как он утверждает, является «вероятно» самым маленьким двигателем V12 в мире. Приводимое в действие впрыском сжатого воздуха (0,1 кг/кв. см), это маленькое чудо может похвастаться общим рабочим объемом 12 кубических сантиметров благодаря двенадцати поршням диаметром 11,3 мм и работает как шарм. Лучше всего то, что вы можете увидеть, как это происходит, в подробном видео, которое следует ниже.

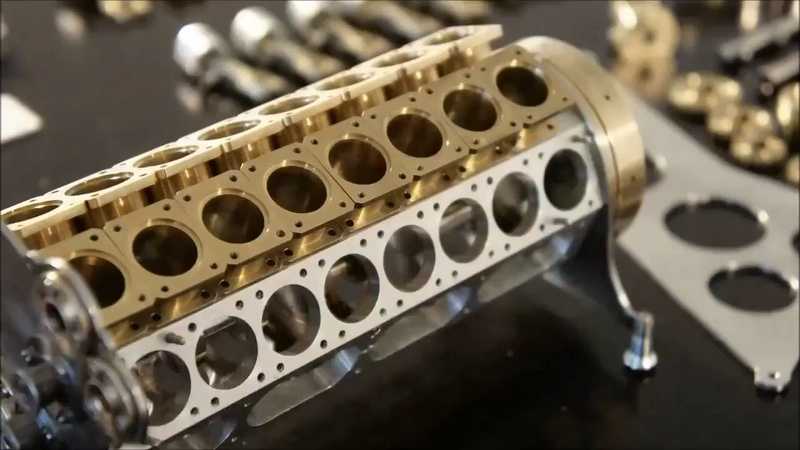






 ./../images/themes/09.jpg»>
./../images/themes/09.jpg»>





 Они доступны как
Они доступны как

 ./../images/themes/10.jpg»>
./../images/themes/10.jpg»> ./../images/themes/10.jpg»>
./../images/themes/10.jpg»> Я также включил несколько плюсов и минусов ниже для радиоуправляемых самолетов с нитродвигателем.
Я также включил несколько плюсов и минусов ниже для радиоуправляемых самолетов с нитродвигателем. 8/5.0
8/5.0 Кроме того, вам не нужно менять батареи или заряжать их между рейсами. Наконец, дополнительный вес самолета с нитроуправлением делает его более устойчивым на ветру.
Кроме того, вам не нужно менять батареи или заряжать их между рейсами. Наконец, дополнительный вес самолета с нитроуправлением делает его более устойчивым на ветру. Радиоуправляемый авиационный двигатель 65AX накаливания
Радиоуправляемый авиационный двигатель 65AX накаливания Он имеет глушитель E4010A и идеальное соотношение мощности и веса. Это отличный выбор для масштабных, спортивных и учебных самолетов.
Он имеет глушитель E4010A и идеальное соотношение мощности и веса. Это отличный выбор для масштабных, спортивных и учебных самолетов. с. при 16000 об/мин
с. при 16000 об/мин Dle также обновил электронный блок зажигания и снабдил двигатель более легким поршнем. Его очень легко установить благодаря расположению выхлопа и креплению на балке. И вы можете положиться на помповый карбюратор для постоянного потока топлива.
Dle также обновил электронный блок зажигания и снабдил двигатель более легким поршнем. Его очень легко установить благодаря расположению выхлопа и креплению на балке. И вы можете положиться на помповый карбюратор для постоянного потока топлива. с. при 9000 об/мин
с. при 9000 об/мин
 Тут же можно
Тут же можно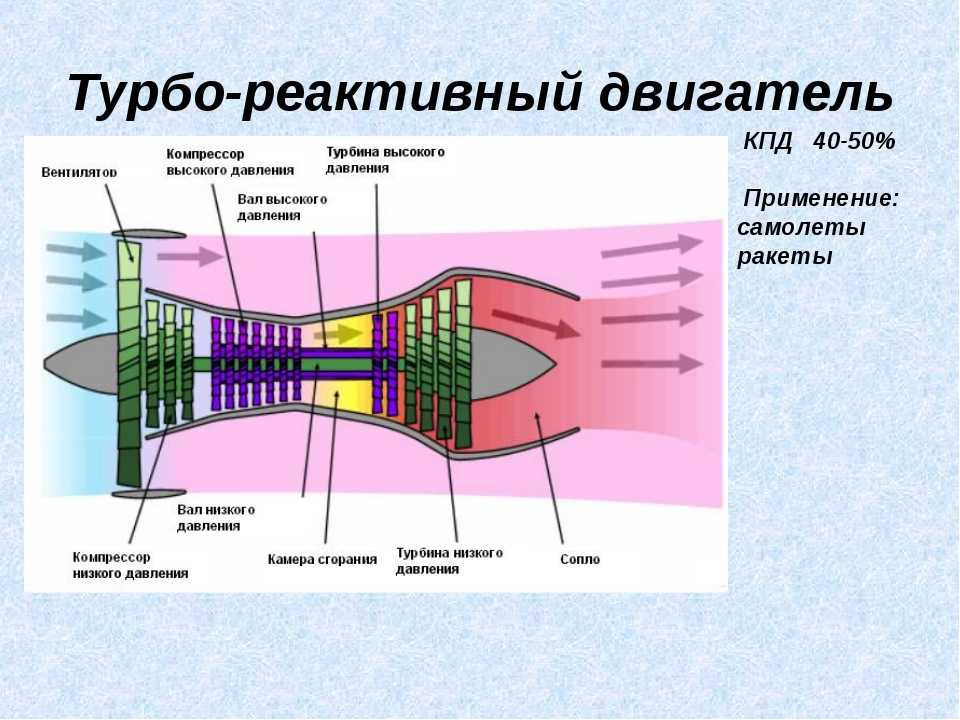 Россия является мировым
Россия является мировым Классификацию
Классификацию
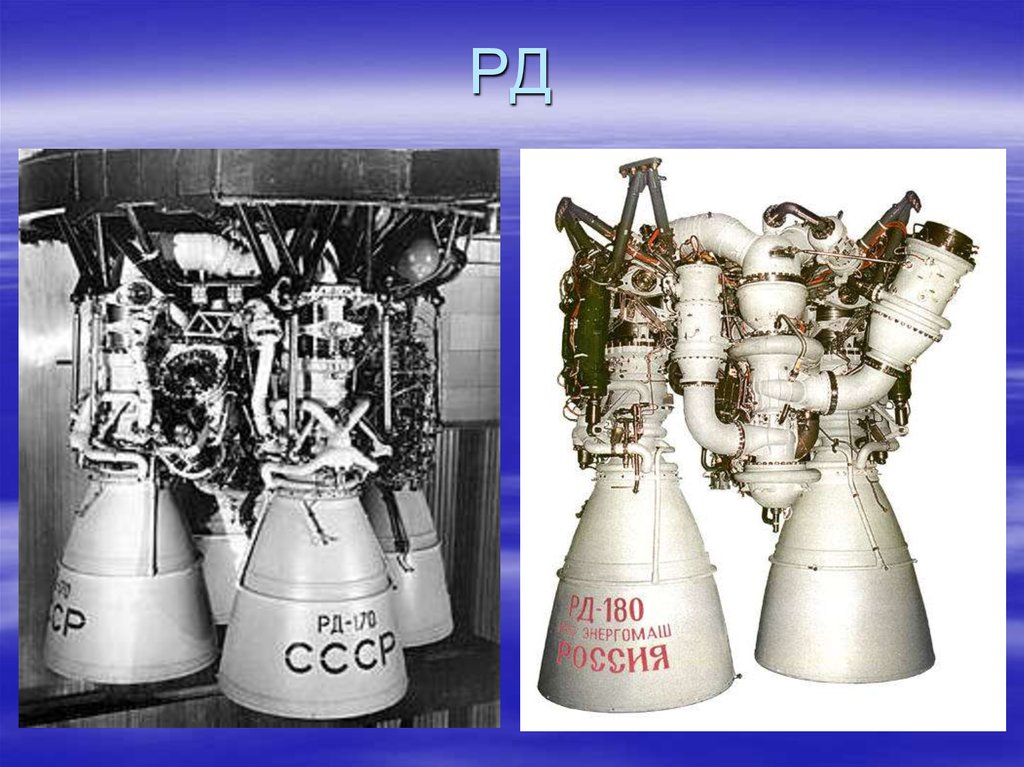 Жидкостные ядерные
Жидкостные ядерные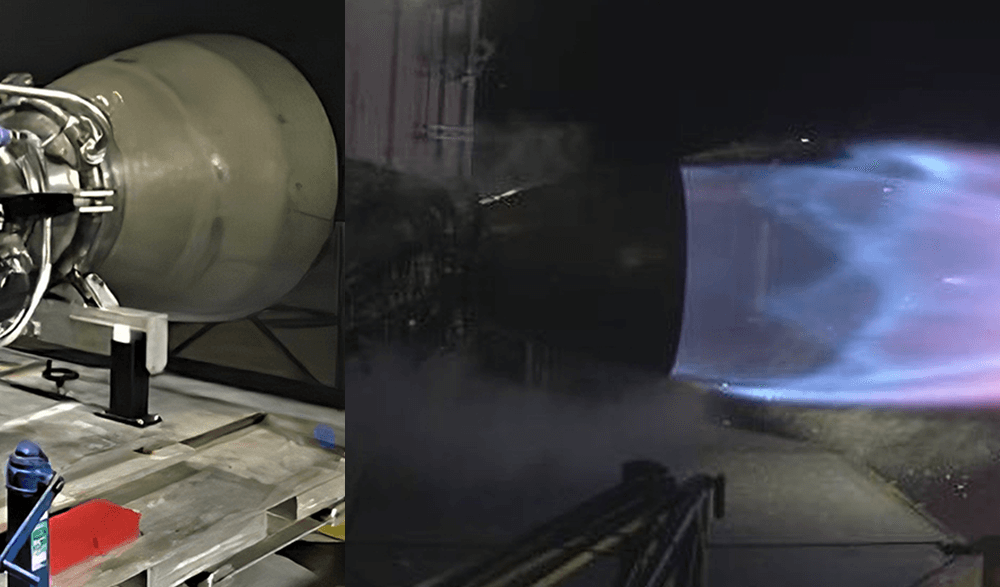 В то же время, возможно
В то же время, возможно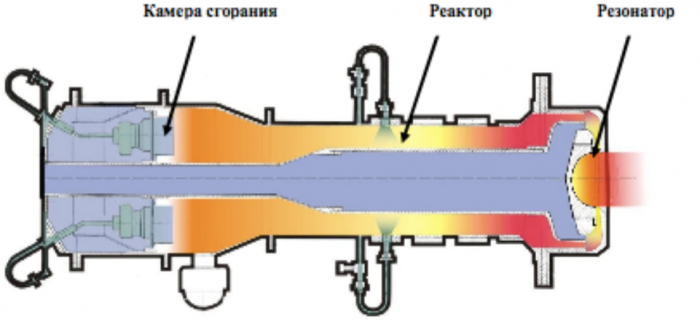 Около
Около 3
3 Атомные заряды мощностью
Атомные заряды мощностью
 Пять месяцев
Пять месяцев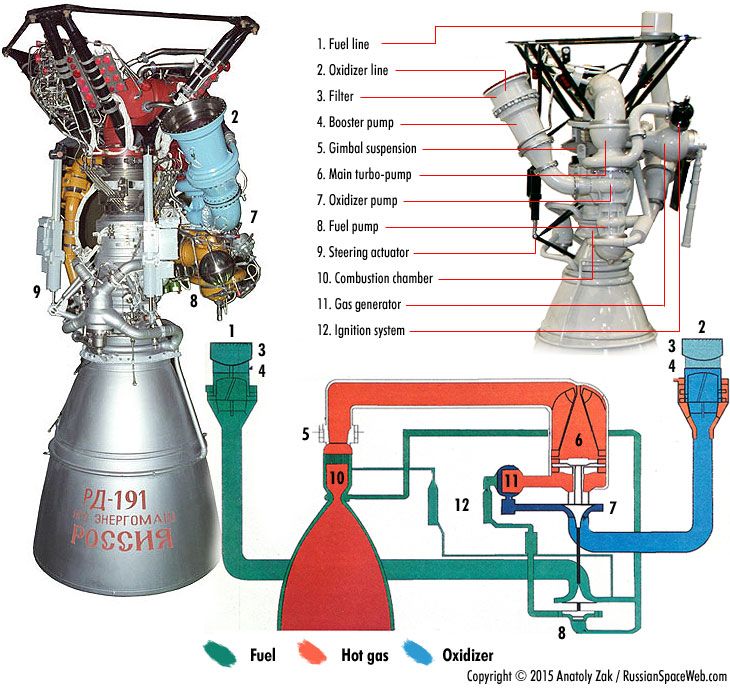 На фоне
На фоне


 6),
6), 5·1011 м, R2 = 2.28·1011
5·1011 м, R2 = 2.28·1011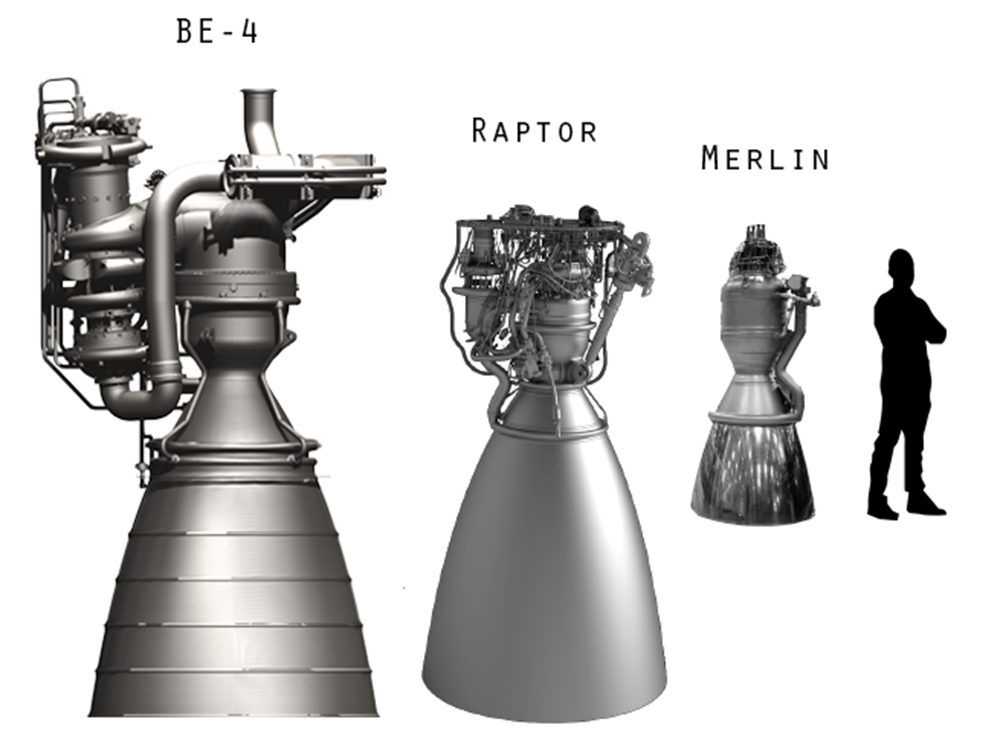
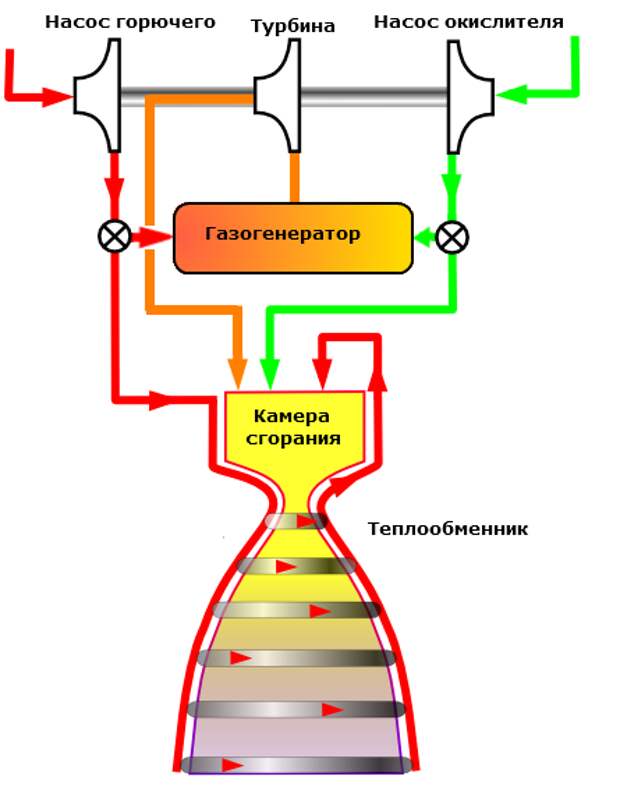 001, kсу = 0.01, kТО = 0.1
001, kсу = 0.01, kТО = 0.1 Поэтому, несмотря на
Поэтому, несмотря на Интернет-ресурс:
Интернет-ресурс: Важно понимать, что мы не можем разогнать ракету или самолёт до скорости большей, чем скорость истечения топлива — раскалённого газа, выбрасываемого назад.
Важно понимать, что мы не можем разогнать ракету или самолёт до скорости большей, чем скорость истечения топлива — раскалённого газа, выбрасываемого назад.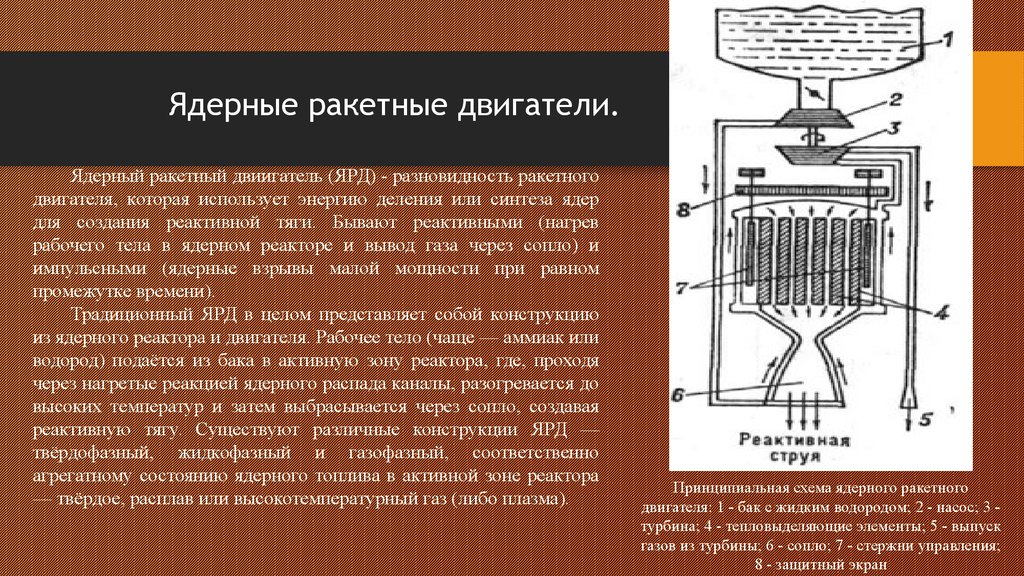 Поэтому инженеры подбирают всё более и более активное горючее, единица которой давала бы максимальную отдачу, увеличивая удельный импульс.
Поэтому инженеры подбирают всё более и более активное горючее, единица которой давала бы максимальную отдачу, увеличивая удельный импульс. Очевидно, что для достижения ближайших планет, а тем более звёзд, нам необходимы достаточно большие скорости, обеспечить которые жидкотопливные ракеты не в состоянии.
Очевидно, что для достижения ближайших планет, а тем более звёзд, нам необходимы достаточно большие скорости, обеспечить которые жидкотопливные ракеты не в состоянии. Основными компонентами топлива являются жидкий кислород (окислитель) и водород (горючее). RS-25 использует схему закрытого цикла (с дожиганием генераторного газа).
Основными компонентами топлива являются жидкий кислород (окислитель) и водород (горючее). RS-25 использует схему закрытого цикла (с дожиганием генераторного газа).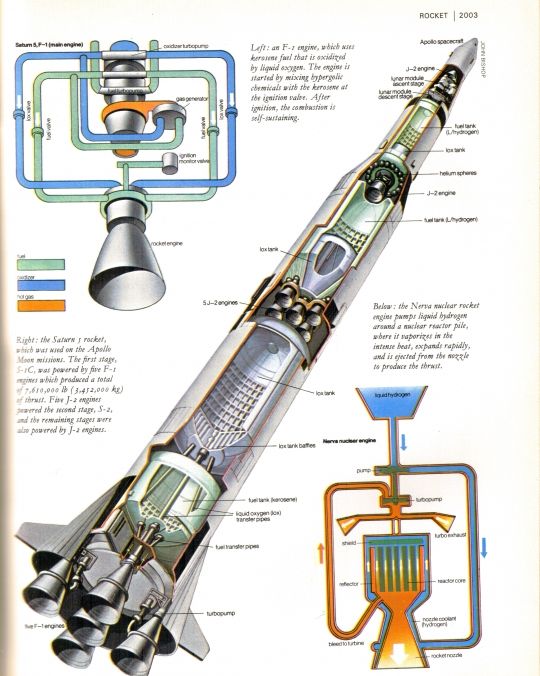
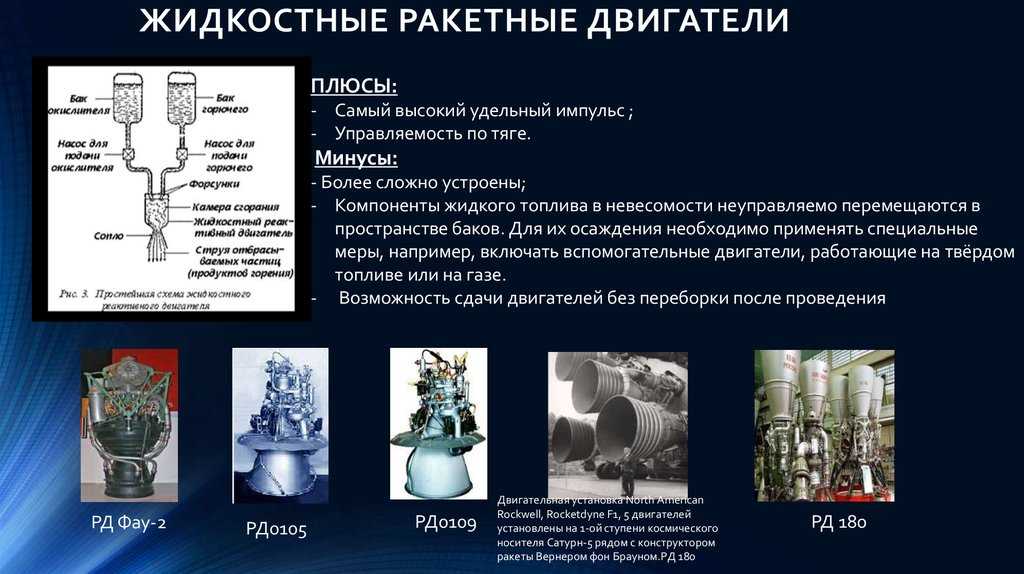

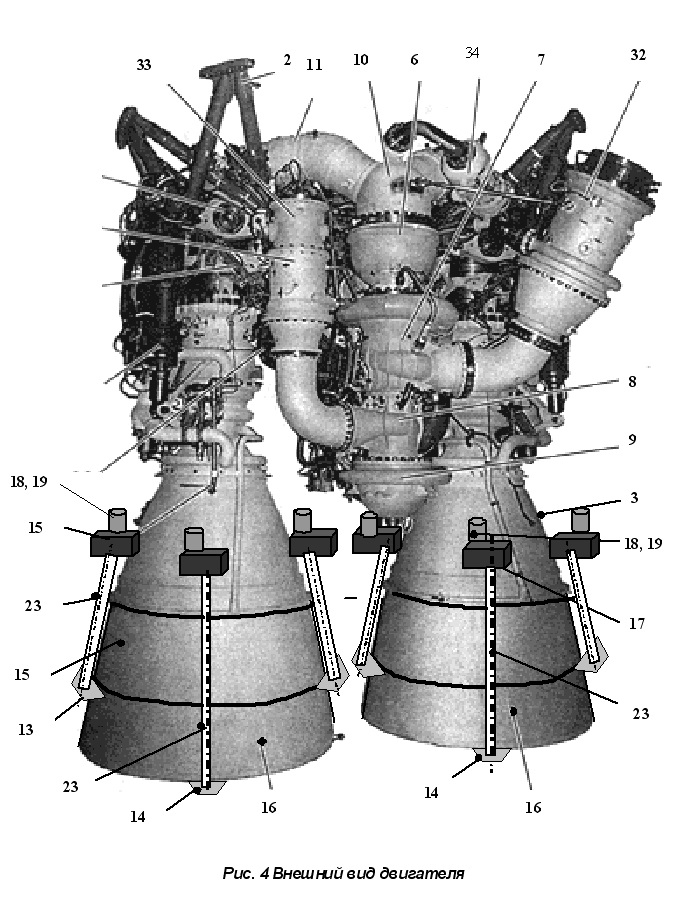
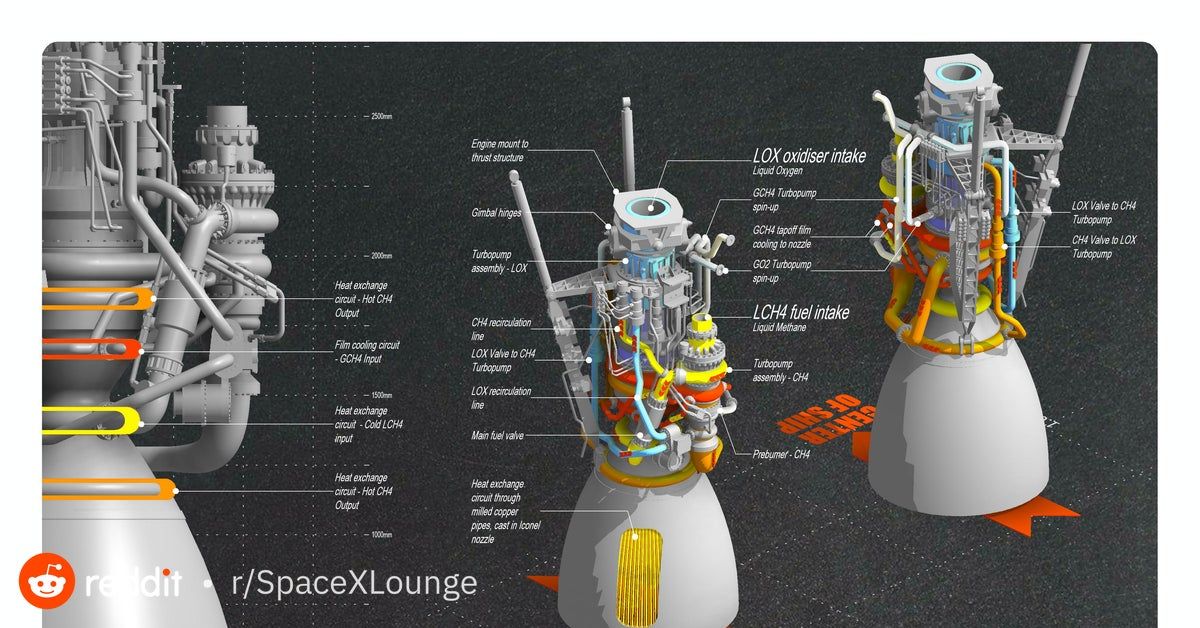

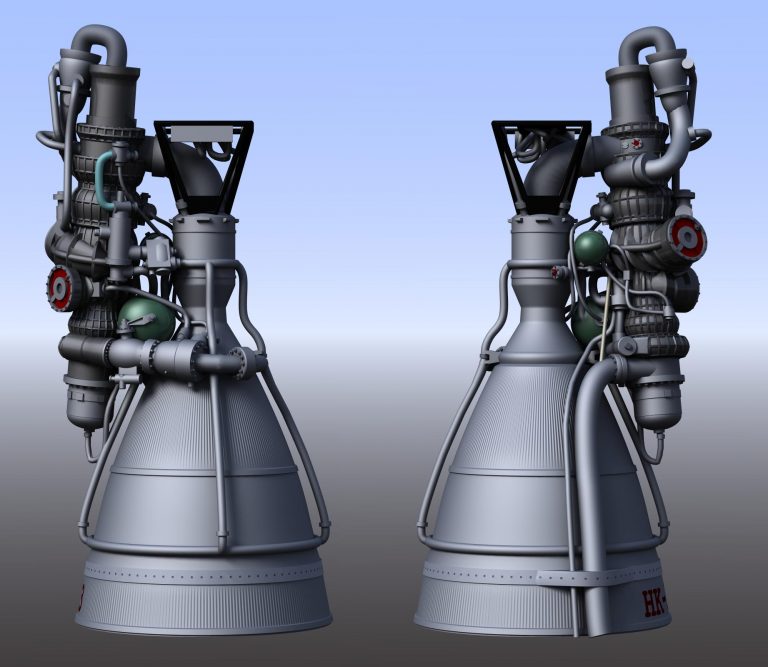 Жидкость обычно представляет собой газ, образующийся при сгорании под высоким давлением твердого или жидкого топлива, состоящего из компонентов топлива и окислителя, в камере сгорания. По мере расширения газов через сопло они разгоняются до очень высокой (сверхзвуковой) скорости, и реакция на это толкает двигатель в противоположном направлении. Горение чаще всего используется для практических ракет, поскольку для наилучших характеристик желательны высокие температуры и давления.
Жидкость обычно представляет собой газ, образующийся при сгорании под высоким давлением твердого или жидкого топлива, состоящего из компонентов топлива и окислителя, в камере сгорания. По мере расширения газов через сопло они разгоняются до очень высокой (сверхзвуковой) скорости, и реакция на это толкает двигатель в противоположном направлении. Горение чаще всего используется для практических ракет, поскольку для наилучших характеристик желательны высокие температуры и давления.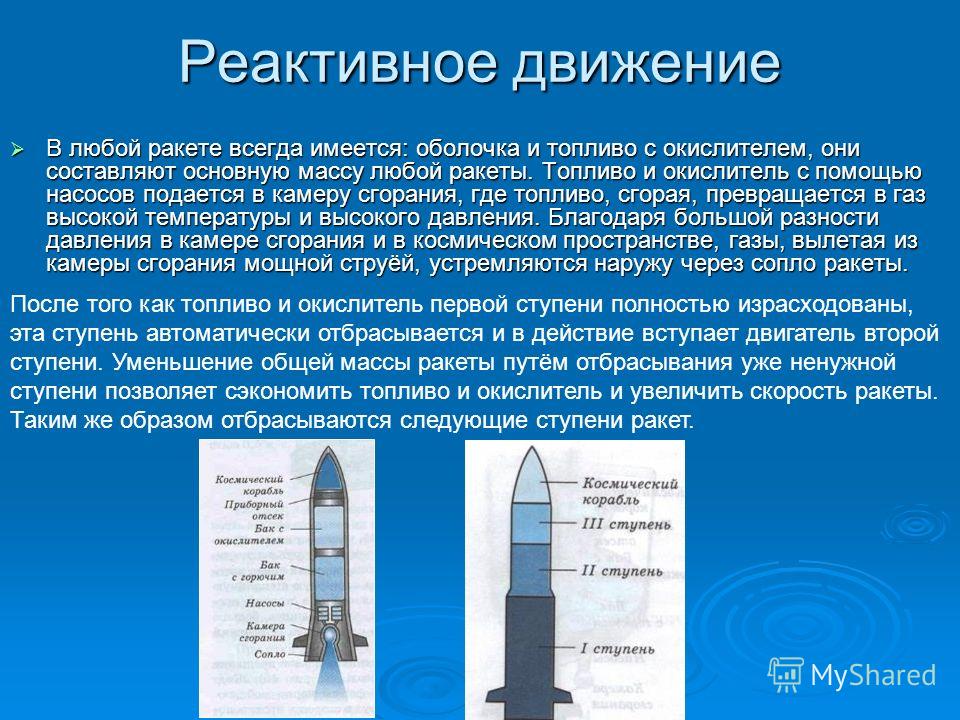 С физическим приводом: Сюда входят водяные ракеты и двигатели на холодном газе, которые используют воду под давлением и инертные газы соответственно для получения желаемой тяги.
С физическим приводом: Сюда входят водяные ракеты и двигатели на холодном газе, которые используют воду под давлением и инертные газы соответственно для получения желаемой тяги.
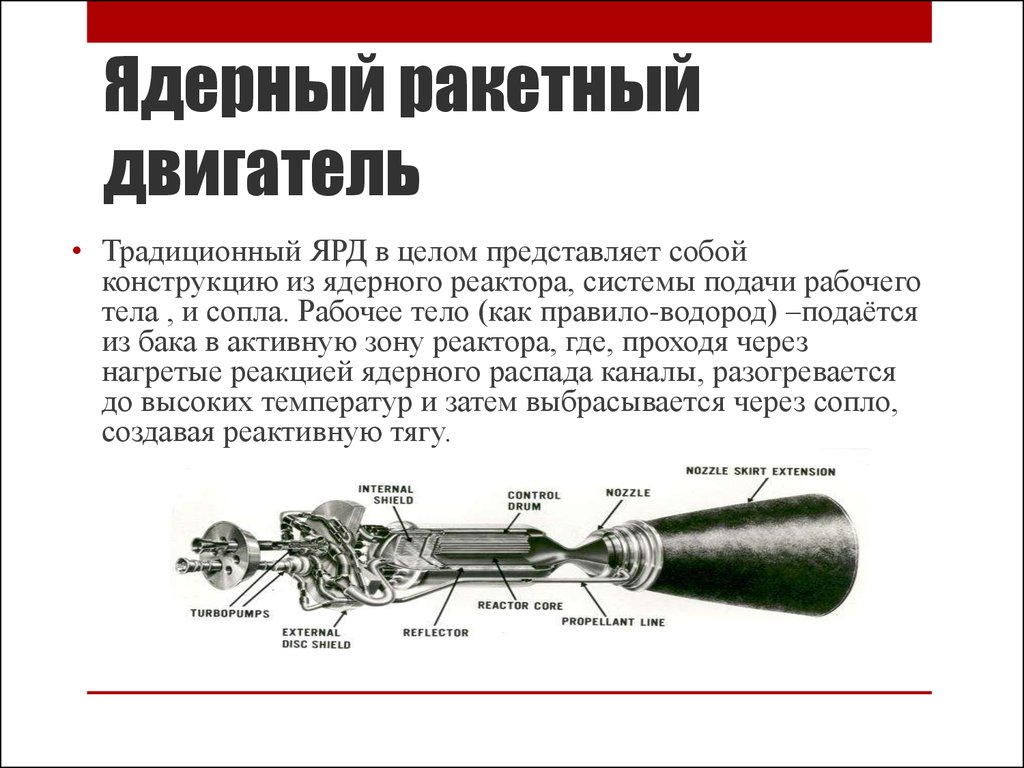 Это реактивные двигатели. Принцип его в том, что
Это реактивные двигатели. Принцип его в том, что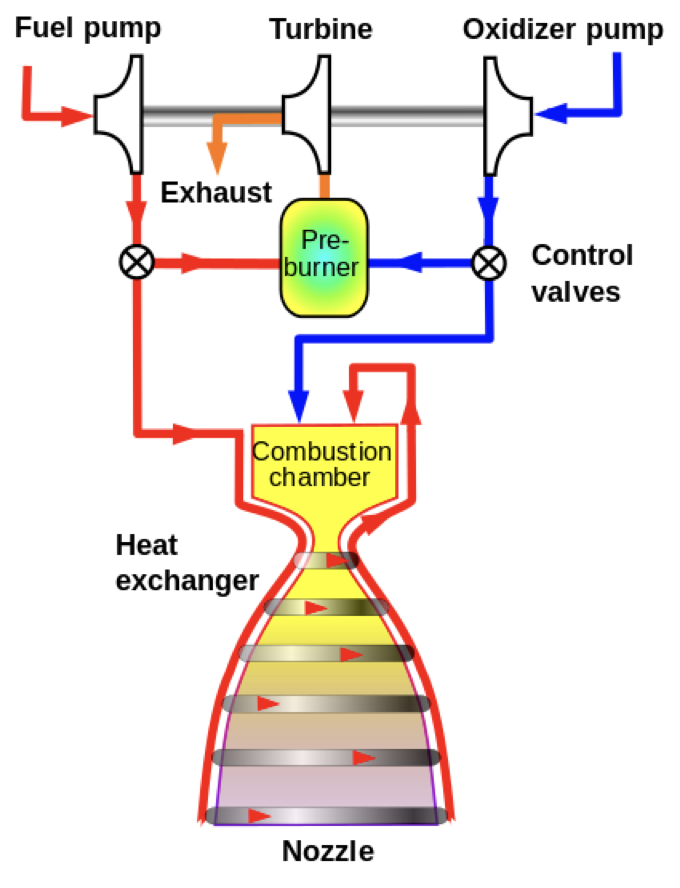 ) Чтобы создать это
) Чтобы создать это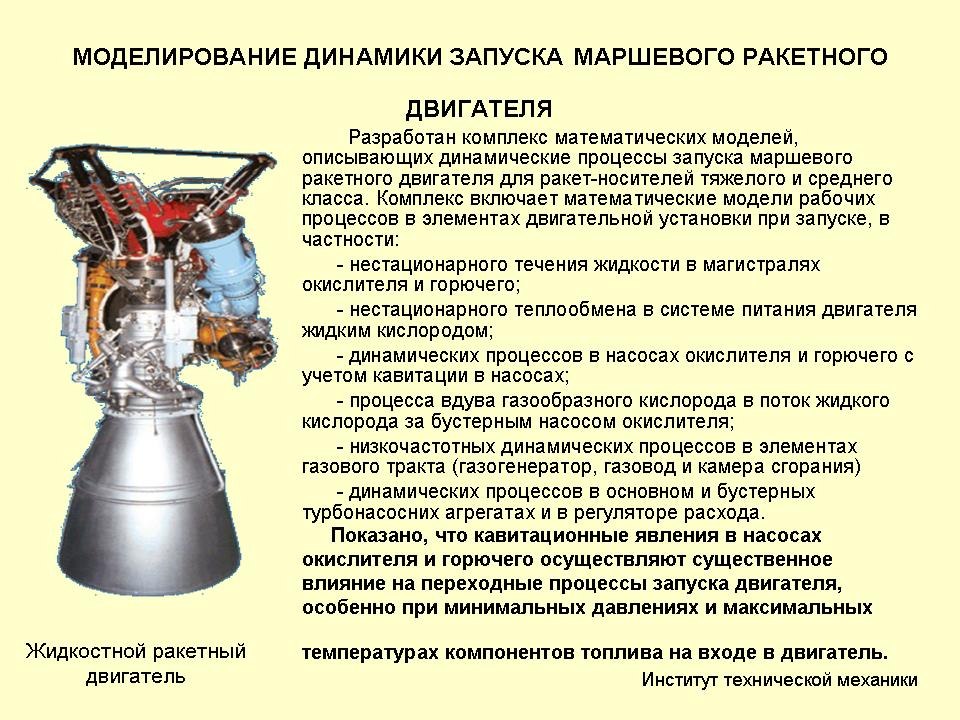 Это делает их неуправляемыми.
Это делает их неуправляемыми.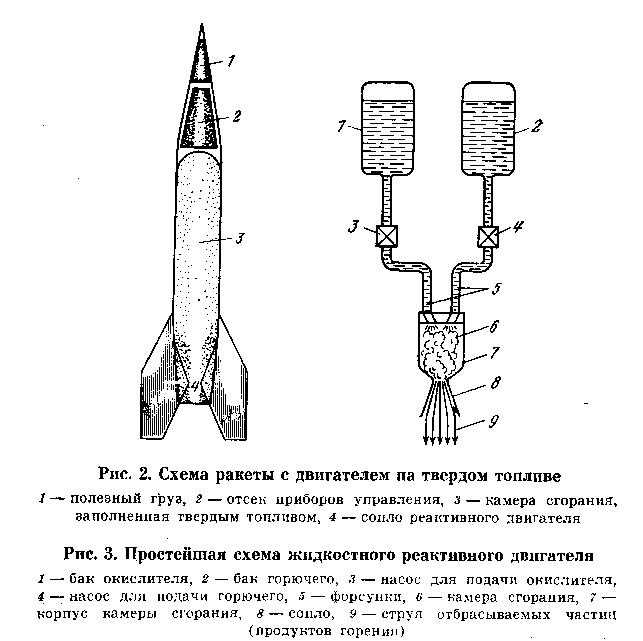

 С постоянным ужесточением в мире экологических норм, чтоб уменьшить выбросы в атмосферу парниковых газов большинство автопроизводителей вынуждены уменьшать объем двигателей и количество цилиндров в автомобиле, но при этом пытаются сохранить определенный уровень адекватной мощности авто. Таким образом, если кто-то вам говорит, что уменьшение объема двигателя обязательно приводит к потере его мощности, то они ошибаются. Предлагаем вам ознакомиться с Топ-10 моторов у которых по современным меркам довольно малый объем двигателя, но они как раз и доказывают и опровергают те неподтвержденные слухи, что тренд на уменьшение цилиндров в двигателе идет автомобилю во вред.
С постоянным ужесточением в мире экологических норм, чтоб уменьшить выбросы в атмосферу парниковых газов большинство автопроизводителей вынуждены уменьшать объем двигателей и количество цилиндров в автомобиле, но при этом пытаются сохранить определенный уровень адекватной мощности авто. Таким образом, если кто-то вам говорит, что уменьшение объема двигателя обязательно приводит к потере его мощности, то они ошибаются. Предлагаем вам ознакомиться с Топ-10 моторов у которых по современным меркам довольно малый объем двигателя, но они как раз и доказывают и опровергают те неподтвержденные слухи, что тренд на уменьшение цилиндров в двигателе идет автомобилю во вред.
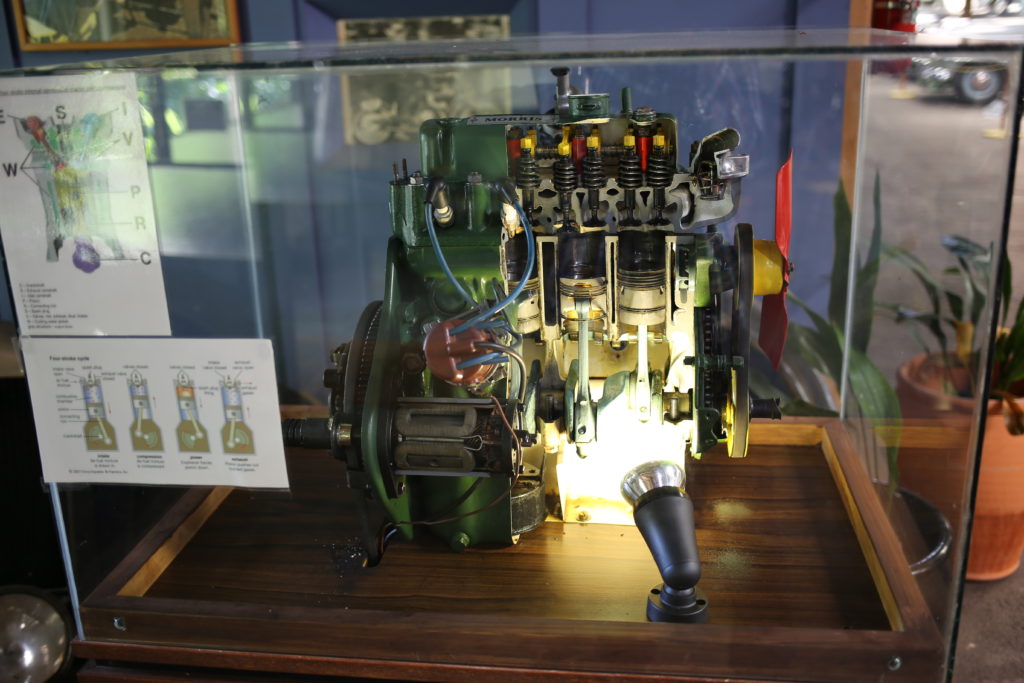 с. (максимальный крутящий момент 120 Нм). Этого вполне достаточно, чтобы с 0 до 100 км/час автомобиль мог разогнаться за 10,7 секунд. Понятно всем, что автомобиль Smart Fortwo проиграет на автодороге любые гонки, но главное его преимущество в экономии топлива, в смешанном цикле автомобиль потребляет всего 4,9 л на 100 км пути.
с. (максимальный крутящий момент 120 Нм). Этого вполне достаточно, чтобы с 0 до 100 км/час автомобиль мог разогнаться за 10,7 секунд. Понятно всем, что автомобиль Smart Fortwo проиграет на автодороге любые гонки, но главное его преимущество в экономии топлива, в смешанном цикле автомобиль потребляет всего 4,9 л на 100 км пути. Плюс электрификация: большие перспективы имеют «мягкие» гибриды с дополнительной бортовой сетью напряжением 48 В — например, такая система установлена на новом Audi A8. Оптимизм, с каким инженеры говорили о дальнейшем развитии турбодизелей, внушает уверенность, что радикальные заявления политиков и экологов пока останутся нереализованными.
Плюс электрификация: большие перспективы имеют «мягкие» гибриды с дополнительной бортовой сетью напряжением 48 В — например, такая система установлена на новом Audi A8. Оптимизм, с каким инженеры говорили о дальнейшем развитии турбодизелей, внушает уверенность, что радикальные заявления политиков и экологов пока останутся нереализованными. Расход топлива в смешанном цикле тоже вполне адекватный — 7,8 литров на 100 км.
Расход топлива в смешанном цикле тоже вполне адекватный — 7,8 литров на 100 км. Перед каждой поездкой, особенно при минусовых температурах, желательно прогревать машину в течение 5–10 минут.
Перед каждой поездкой, особенно при минусовых температурах, желательно прогревать машину в течение 5–10 минут. При солидном пробеге наблюдается повышенная дымность, что свидетельствует о неполном сгорании топлива.
При солидном пробеге наблюдается повышенная дымность, что свидетельствует о неполном сгорании топлива. Например, этот мотор также устанавливается и на новую модель 2021 года Chevrolet Cruze. Мощность этого двигателя составляет 153 л.с. Средний расход топлива заявленный производителем составляет 6,7 литров на 100 км, что делает такой автомобиль согласитесь с нами, просто потрясающим.
Например, этот мотор также устанавливается и на новую модель 2021 года Chevrolet Cruze. Мощность этого двигателя составляет 153 л.с. Средний расход топлива заявленный производителем составляет 6,7 литров на 100 км, что делает такой автомобиль согласитесь с нами, просто потрясающим. Однако на деле механизм является бесполезной безделушкой, поскольку работает не на жидком топливе, а на сжатом воздухе, и при рабочем объеме в 12 кубических сантиметров имеет очень низкий КПД.
Однако на деле механизм является бесполезной безделушкой, поскольку работает не на жидком топливе, а на сжатом воздухе, и при рабочем объеме в 12 кубических сантиметров имеет очень низкий КПД. В частности, это колоссальные теплопотери из-за чрезвычайно тонких стенок камеры сгорания и недолговечность материалов при воздействии высоких температур. Однако, когда все-таки крошечные ДВС сойдут с конвейера, всего нескольких граммов топлива хватит, чтобы заставить механизм при КПД в 10 % работать в 20 раз дольше и эффективнее аккумуляторов таких же размеров.
В частности, это колоссальные теплопотери из-за чрезвычайно тонких стенок камеры сгорания и недолговечность материалов при воздействии высоких температур. Однако, когда все-таки крошечные ДВС сойдут с конвейера, всего нескольких граммов топлива хватит, чтобы заставить механизм при КПД в 10 % работать в 20 раз дольше и эффективнее аккумуляторов таких же размеров. Мощность такого трехцилиндрового мотора Mini составляет 136 л.с., а максимальный крутящий момент равен 220 Нм. Расход топлива в комбинированном режиме составляет 5,3 литров на 100 км пути.
Мощность такого трехцилиндрового мотора Mini составляет 136 л.с., а максимальный крутящий момент равен 220 Нм. Расход топлива в комбинированном режиме составляет 5,3 литров на 100 км пути.

 Выпускается с 2003 года. Диапазон мощности – от 75 до 105 л.с.
Выпускается с 2003 года. Диапазон мощности – от 75 до 105 л.с.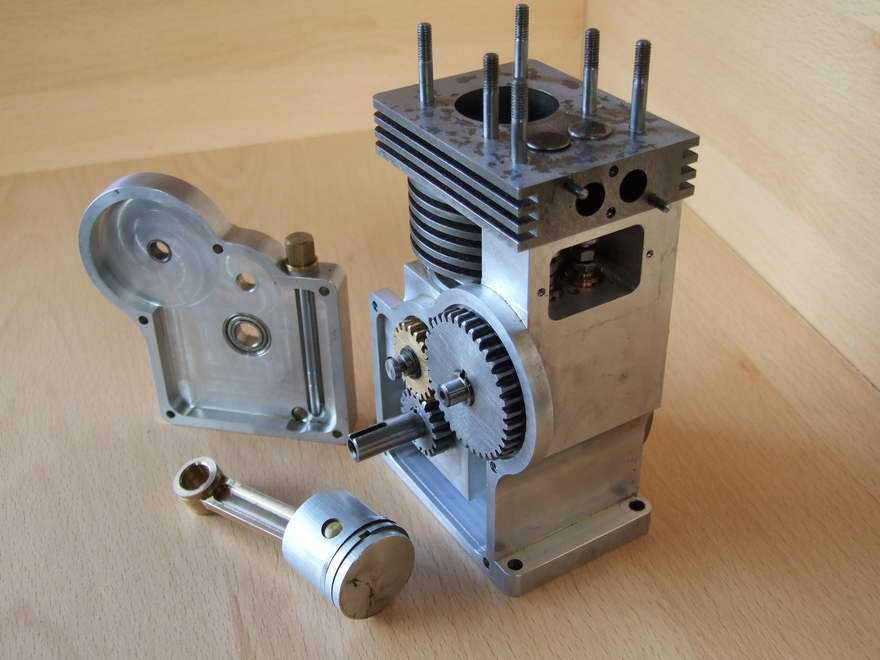 Так как силовой агрегат выступал под эмблемой различных автомобильных марок, то в каждом случае он получал свое название. В основном это MultiJet и CDTI, а также JTDM, DDiS, TDCi.
Так как силовой агрегат выступал под эмблемой различных автомобильных марок, то в каждом случае он получал свое название. В основном это MultiJet и CDTI, а также JTDM, DDiS, TDCi.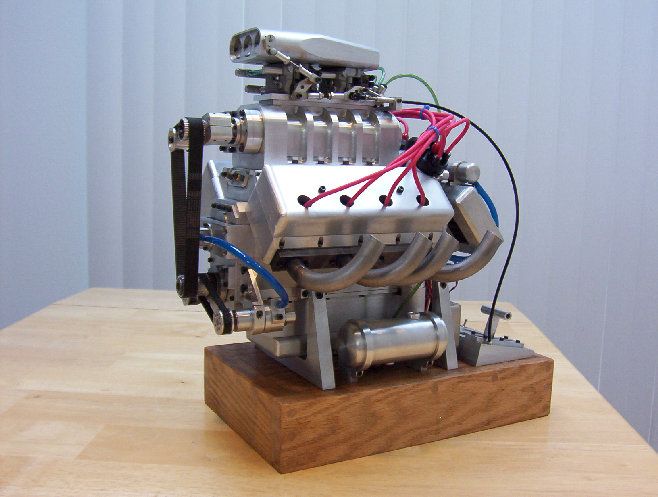 К тому же при больших нагрузках увеличивается расход масла на угар. Необходимо часто контролировать уровень масла, потому что его дефицит может привести к перескоку цепи привода распределительного вала.
К тому же при больших нагрузках увеличивается расход масла на угар. Необходимо часто контролировать уровень масла, потому что его дефицит может привести к перескоку цепи привода распределительного вала.
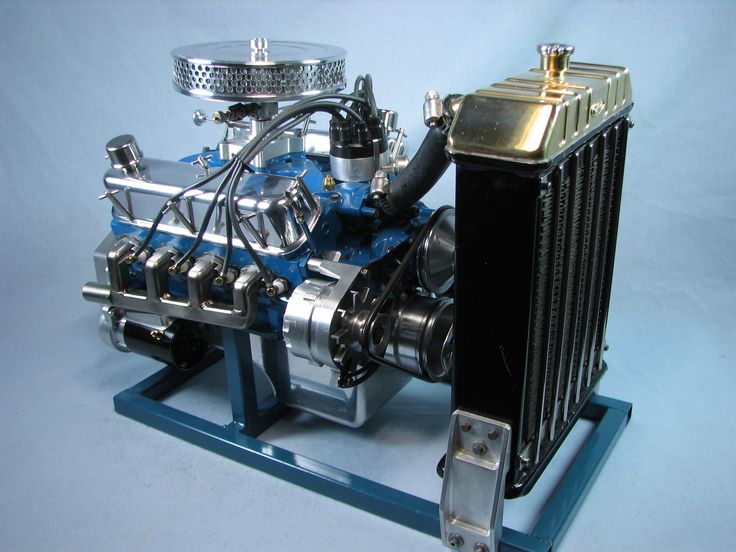 Этот фильтр забивается при кратковременных городских поездках. Процедура прожига запускается на холостых оборотах: момент прожига можно определить по выхлопу и оборотах на холостых. То есть, при прожиге из выхлопной трубы идет дымок с характерным запахом пластика и обороты поднимаются до 1000. Обязательно нужно дождаться окончания прожига и потом глушить двигатель. Если раньше заглушить, то топливо попадет в поддон и разбавит моторное масло. Вообще, после нескольких удачных прожигов сажевого фильтра рекомендуется внепланово менять моторное масло. Чтобы достичь естественной и более щадящей очистки сажевого фильтра, следует «выгуливать» мотор 1,3 CDTI/Multijet в трассовых режимах, проезжая хотя бы по 50 км с постоянной высокой скоростью.
Этот фильтр забивается при кратковременных городских поездках. Процедура прожига запускается на холостых оборотах: момент прожига можно определить по выхлопу и оборотах на холостых. То есть, при прожиге из выхлопной трубы идет дымок с характерным запахом пластика и обороты поднимаются до 1000. Обязательно нужно дождаться окончания прожига и потом глушить двигатель. Если раньше заглушить, то топливо попадет в поддон и разбавит моторное масло. Вообще, после нескольких удачных прожигов сажевого фильтра рекомендуется внепланово менять моторное масло. Чтобы достичь естественной и более щадящей очистки сажевого фильтра, следует «выгуливать» мотор 1,3 CDTI/Multijet в трассовых режимах, проезжая хотя бы по 50 км с постоянной высокой скоростью. Выглядит это следующим образом. При остановке и работе на холостых оборотах автоматически включаются все электрические потребители, в том числе обогрев заднего стекла, свечи преднакала. Из-за этого возрастает нагрузка на двигатель, как следствие — повышается температура двигателя. Включается послевпрыск. За счет этого повышается температура выхлопных газов – фильтр прожигается. Но не всегда эта процедура оказывается действенной. И тогда проявляются следующие симптомы: снижается разгонная динамика, вырастает расход топлива, появляется едкий запах несгоревшего дизтоплива.
Выглядит это следующим образом. При остановке и работе на холостых оборотах автоматически включаются все электрические потребители, в том числе обогрев заднего стекла, свечи преднакала. Из-за этого возрастает нагрузка на двигатель, как следствие — повышается температура двигателя. Включается послевпрыск. За счет этого повышается температура выхлопных газов – фильтр прожигается. Но не всегда эта процедура оказывается действенной. И тогда проявляются следующие симптомы: снижается разгонная динамика, вырастает расход топлива, появляется едкий запах несгоревшего дизтоплива. Находящийся в грязных условиях работы клапан EGR просто заклинивает в одном положении: его направляющая втулка загрязняется нагаром и сажей, клапан перестает работать. В этом случае электрическая часть системы EGR проблемы не видит, но фиксирует некорректные параметры работы, из-за чего двигатель останавливается.
Находящийся в грязных условиях работы клапан EGR просто заклинивает в одном положении: его направляющая втулка загрязняется нагаром и сажей, клапан перестает работать. В этом случае электрическая часть системы EGR проблемы не видит, но фиксирует некорректные параметры работы, из-за чего двигатель останавливается.
 Сайт Валентина выглядит так, как будто принимает индивидуальные заказы, поэтому вы можете найти свою любимую машину и начать воссоздавать ее.
Сайт Валентина выглядит так, как будто принимает индивидуальные заказы, поэтому вы можете найти свою любимую машину и начать воссоздавать ее. , 11:42
, 11:42 Исходя из обычного производственного цикла в семь-восемь лет, Mini должен стать чистый бренд EV в 2032/2033 годах, хотя нормальный цикл продукта в этом случае на самом деле является лишь предположением. Тем не менее, цель BMW сделать Mini электрическим к началу 2030-х годов может быть достигнута таким образом.
Исходя из обычного производственного цикла в семь-восемь лет, Mini должен стать чистый бренд EV в 2032/2033 годах, хотя нормальный цикл продукта в этом случае на самом деле является лишь предположением. Тем не менее, цель BMW сделать Mini электрическим к началу 2030-х годов может быть достигнута таким образом.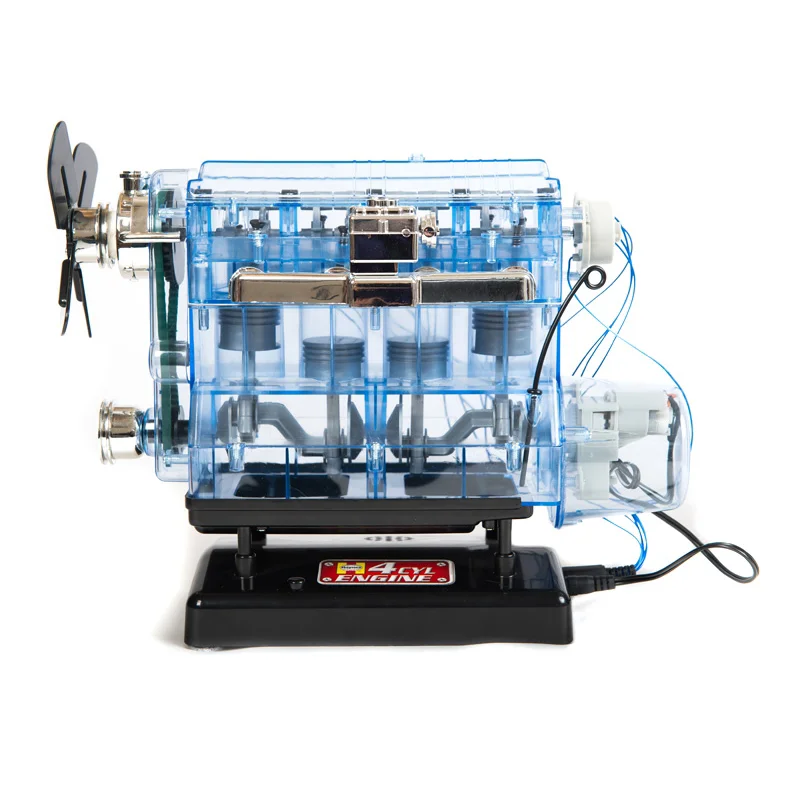 Компании любят использовать фразу с электрифицированными приводами для описания гибрида или подключаемого гибрида. Однако в случае с Countryman BMW уже подтвердила, что следующее поколение модели также будет оснащено аккумуляторно-электрическим приводом. В частности, Mini Countryman будет сдвинут ближе к BMW X1, также построенному в Лейпциге, который также получит полностью электрическую версию iX1.
Компании любят использовать фразу с электрифицированными приводами для описания гибрида или подключаемого гибрида. Однако в случае с Countryman BMW уже подтвердила, что следующее поколение модели также будет оснащено аккумуляторно-электрическим приводом. В частности, Mini Countryman будет сдвинут ближе к BMW X1, также построенному в Лейпциге, который также получит полностью электрическую версию iX1.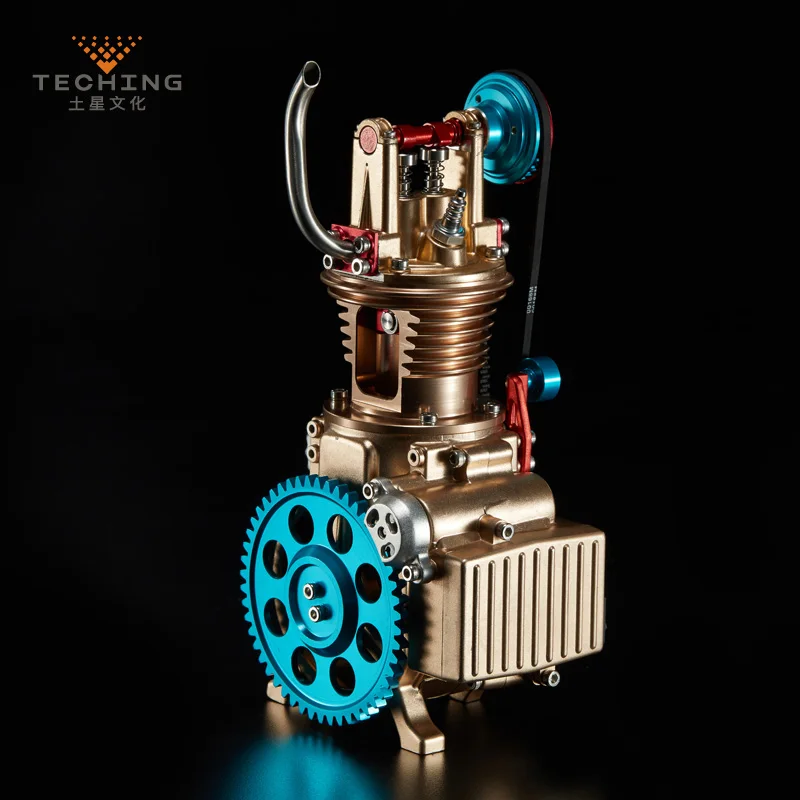 И готовность переосмыслить статус-кво определяет бренд по сей день», — говорит генеральный директор бренда Бернд Кёрбер. «Помимо электромобильности, развитие новых целевых групп и рынков сбыта является ключевым фактором для будущего Mini».
И готовность переосмыслить статус-кво определяет бренд по сей день», — говорит генеральный директор бренда Бернд Кёрбер. «Помимо электромобильности, развитие новых целевых групп и рынков сбыта является ключевым фактором для будущего Mini».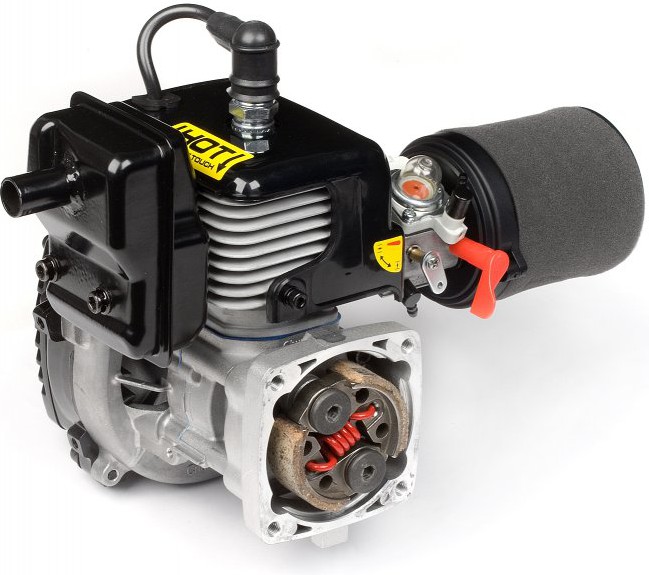



 Проводятся кратковременные и длительные испытания, изучают образование и развитие трещин. Ломается все. Вопрос: как быстро и при каких нагрузках?
Проводятся кратковременные и длительные испытания, изучают образование и развитие трещин. Ломается все. Вопрос: как быстро и при каких нагрузках? Для горячей части — лопаток, дисков — новые никелевые жаропрочные сплавы, теплозащитные покрытия. Для относительно холодных деталей компрессора, корпуса и т.д. — различные титановые сплавы. Применение новых материалов стало одним из условий создания перспективных двигателей. Все конструирование в авиации — это борьба с весом. Наша задача в том, чтобы самолет нес максимально полезную нагрузку. Поэтому мы максимально должны облегчить двигатель.
Для горячей части — лопаток, дисков — новые никелевые жаропрочные сплавы, теплозащитные покрытия. Для относительно холодных деталей компрессора, корпуса и т.д. — различные титановые сплавы. Применение новых материалов стало одним из условий создания перспективных двигателей. Все конструирование в авиации — это борьба с весом. Наша задача в том, чтобы самолет нес максимально полезную нагрузку. Поэтому мы максимально должны облегчить двигатель. Углепластик и металл вместе — достаточно сложная конструкция, для создания которой необходим большой объем знаний. Но цель та же — снижение веса.
Углепластик и металл вместе — достаточно сложная конструкция, для создания которой необходим большой объем знаний. Но цель та же — снижение веса. Но со следующего года на него начнут устанавливать отечественные ПД-14. Это первый с 1992 года (после ПС-90А) полностью российский турбовентиляторный двигатель для гражданской авиации.
Но со следующего года на него начнут устанавливать отечественные ПД-14. Это первый с 1992 года (после ПС-90А) полностью российский турбовентиляторный двигатель для гражданской авиации.
 Его основа — проводники, охлаждаемые жидким азотом, который при очень низкой температуре (-196°C) обладает эффектом практически нулевого сопротивления. В результате достигается высокий коэффициент полезного действия и существенно уменьшаются массогабаритные характеристики двигателя.
Его основа — проводники, охлаждаемые жидким азотом, который при очень низкой температуре (-196°C) обладает эффектом практически нулевого сопротивления. В результате достигается высокий коэффициент полезного действия и существенно уменьшаются массогабаритные характеристики двигателя. По планам, в 2019-2021 годах мы испытаем электродвигатель, в 2022-м — генератор.
По планам, в 2019-2021 годах мы испытаем электродвигатель, в 2022-м — генератор. Это интеллектуальная система управления.
Это интеллектуальная система управления. Они уже есть на двигателе ПД-14. Кстати, ПД-14 в своем классе конкуренции ничуть не «глупее», чем, к примеру, американский PW 1400 или европейский LEAP. И даже умнее.
Они уже есть на двигателе ПД-14. Кстати, ПД-14 в своем классе конкуренции ничуть не «глупее», чем, к примеру, американский PW 1400 или европейский LEAP. И даже умнее. И уже испытан. Результаты будут переданы в международную группу.
И уже испытан. Результаты будут переданы в международную группу. В серийном производстве и при ремонте — не факт. Необходимо оценивать экономическую эффективность их использования. Аддитивные технологии всегда будут в серии по себестоимости дороже, чем традиционные. Я, например, не верю в двигатель, целиком распечатанный на 3D-принтере.
В серийном производстве и при ремонте — не факт. Необходимо оценивать экономическую эффективность их использования. Аддитивные технологии всегда будут в серии по себестоимости дороже, чем традиционные. Я, например, не верю в двигатель, целиком распечатанный на 3D-принтере.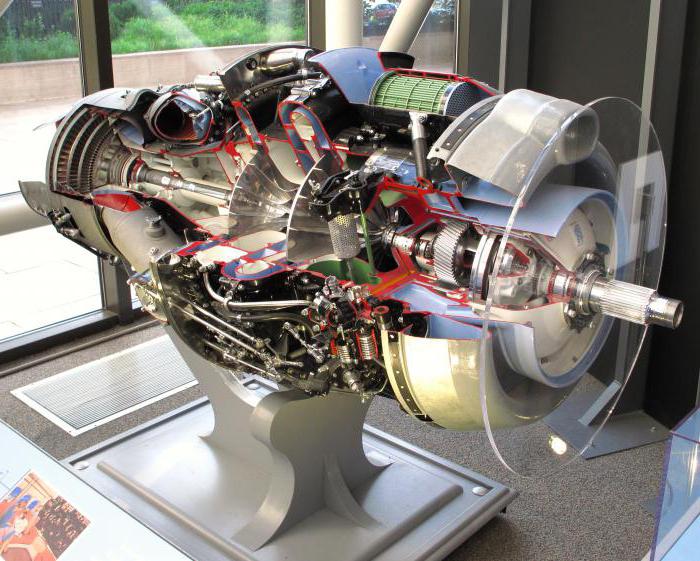 Критерием истины все равно останется физический эксперимент. Другой вопрос, что цифровые технологии, методы математического моделирования, скорее всего, приведут к сокращению объема испытаний. И ускорению проектирования. Это уже происходит.
Критерием истины все равно останется физический эксперимент. Другой вопрос, что цифровые технологии, методы математического моделирования, скорее всего, приведут к сокращению объема испытаний. И ускорению проектирования. Это уже происходит.
 Поэтому у авиадвигателя всегда будет меньшая серия. И он всегда будет дороже. А тут есть возможность на предприятиях, которые освоили производство двигателей для машин, наладить их производство для авиационного применения. Что значит серия? Резко снижаются себестоимость, сроки изготовления. Причем все может быть произведено в России по уже освоенным технологиям.
Поэтому у авиадвигателя всегда будет меньшая серия. И он всегда будет дороже. А тут есть возможность на предприятиях, которые освоили производство двигателей для машин, наладить их производство для авиационного применения. Что значит серия? Резко снижаются себестоимость, сроки изготовления. Причем все может быть произведено в России по уже освоенным технологиям. На примере уже готового мы отрабатываем саму возможность адаптации. Научная работа будет закончена испытаниями на летающей лаборатории. Только летный эксперимент подтвердит, что технология стала авиационной. При продолжении финансирования полный цикл — адаптация и летные испытания — займет примерно три года.
На примере уже готового мы отрабатываем саму возможность адаптации. Научная работа будет закончена испытаниями на летающей лаборатории. Только летный эксперимент подтвердит, что технология стала авиационной. При продолжении финансирования полный цикл — адаптация и летные испытания — займет примерно три года. Для поршневого, конечно, меньше, но тут основная сложность — агрегатчики. Дело в том, что в какое-то время поршневая авиационная тематика просто выпала из поля зрения разработчиков летательных аппаратов. И, соответственно, пропали те, кто изготавливает компоненты, узлы и агрегаты. Так что сегодня работой над адаптацией автомобильного двигателя мы возобновляем и кооперацию. Доверие к техническим решениям восстанавливается непросто.
Для поршневого, конечно, меньше, но тут основная сложность — агрегатчики. Дело в том, что в какое-то время поршневая авиационная тематика просто выпала из поля зрения разработчиков летательных аппаратов. И, соответственно, пропали те, кто изготавливает компоненты, узлы и агрегаты. Так что сегодня работой над адаптацией автомобильного двигателя мы возобновляем и кооперацию. Доверие к техническим решениям восстанавливается непросто. И по весу, и по габаритам. Должно быть наоборот: создается двигатель, и на его основе проектируется летательный аппарат.
И по весу, и по габаритам. Должно быть наоборот: создается двигатель, и на его основе проектируется летательный аппарат. 596969696969696969696969696969.Spende. Odersuchen Sie nach турбина или двигатель, um noch mehr faszinierende Stock-Bilder zu entdecken.
596969696969696969696969696969.Spende. Odersuchen Sie nach турбина или двигатель, um noch mehr faszinierende Stock-Bilder zu entdecken. вектор-иллюстрация — графика двигателя самолета, -клипарт, -мультфильмы и -symbole
вектор-иллюстрация — графика двигателя самолета, -клипарт, -мультфильмы и -symbole spezialisten arbeiten in der technologischen flugzeugentwicklungsanlage. — стоковые фотографии и изображения двигателей самолетов
spezialisten arbeiten in der technologischen flugzeugentwicklungsanlage. — стоковые фотографии и изображения двигателей самолетов 3d-рендеринг — фото двигателя самолета и изображения
3d-рендеринг — фото двигателя самолета и изображения Вращение турбинного двигателя
Вращение турбинного двигателя ..
.. ..
.. Es ist mit keiner Ebene verbunden und der Hintergrund ist schlicht weiß.
Es ist mit keiner Ebene verbunden und der Hintergrund ist schlicht weiß. 3D-рендеринг-Bild.
3D-рендеринг-Bild.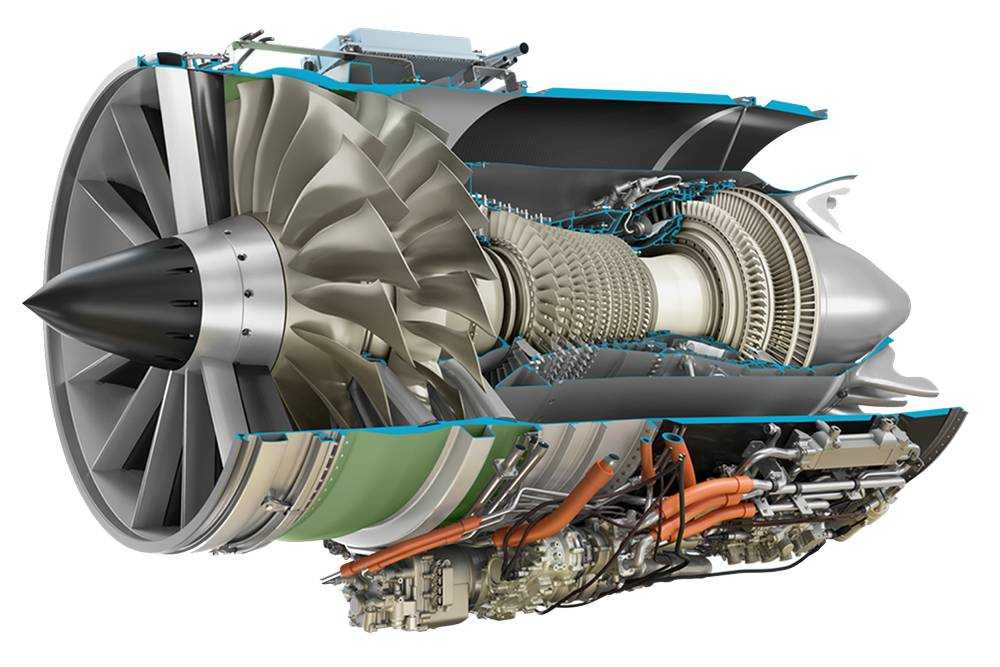 ..
..


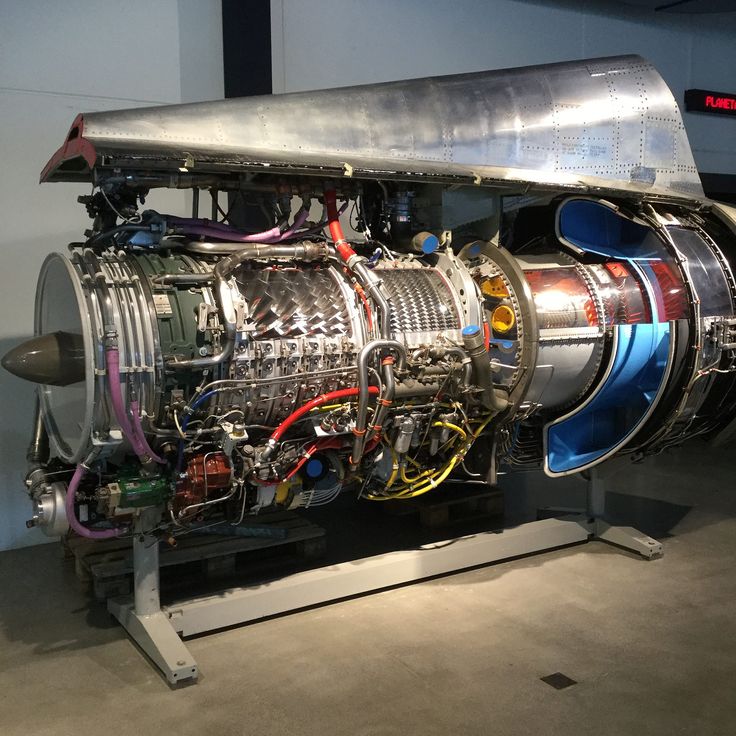 Некоторые стартеры рекомендуют выжидать до минуты между попытками запуска, чтобы ваш стартер мог остыть.
Некоторые стартеры рекомендуют выжидать до минуты между попытками запуска, чтобы ваш стартер мог остыть. Это приводит к скоплению топлива в цилиндрах. Когда вы собираетесь запускать двигатель в следующий раз, скопившееся топливо будет разбрызгиваться до тех пор, пока… бах! он воспламеняется, потенциально вызывая пожар и повреждая ваш двигатель.
Это приводит к скоплению топлива в цилиндрах. Когда вы собираетесь запускать двигатель в следующий раз, скопившееся топливо будет разбрызгиваться до тех пор, пока… бах! он воспламеняется, потенциально вызывая пожар и повреждая ваш двигатель.
 Одна из них обязательно должна быть еще не открытая, потому что мы будем открывать ее особым способом!
Одна из них обязательно должна быть еще не открытая, потому что мы будем открывать ее особым способом! Из нижней половины будем делать топку. Ножницами по металлу прорезаем отверстие для того, чтобы класть туда топливо. По окружности шилом делаем ряд отверстий, чтобы улучшить доступ кислорода (мы сначала не сделали, и огонь плохо разгорался).
Из нижней половины будем делать топку. Ножницами по металлу прорезаем отверстие для того, чтобы класть туда топливо. По окружности шилом делаем ряд отверстий, чтобы улучшить доступ кислорода (мы сначала не сделали, и огонь плохо разгорался).
 Как только вода закипит (где-то минут 3-5), пойдет пар и колесико закрутится.
Как только вода закипит (где-то минут 3-5), пойдет пар и колесико закрутится. Делал в основном из любопытства: одно дело теоретически знать, как там все работает, совсем другое — решить инженерную задачу изготовления паровика из всякого хлама.
Делал в основном из любопытства: одно дело теоретически знать, как там все работает, совсем другое — решить инженерную задачу изготовления паровика из всякого хлама.
 Но сделать вручную с минимальными допусками – чтоб поршень ходил легко и не было зазоров – очень сложно. Поршни переделывал несколько раз. В какой-то мере проблему решает смазка – она немного герметизирует и облегчает ход поршня.
Но сделать вручную с минимальными допусками – чтоб поршень ходил легко и не было зазоров – очень сложно. Поршни переделывал несколько раз. В какой-то мере проблему решает смазка – она немного герметизирует и облегчает ход поршня.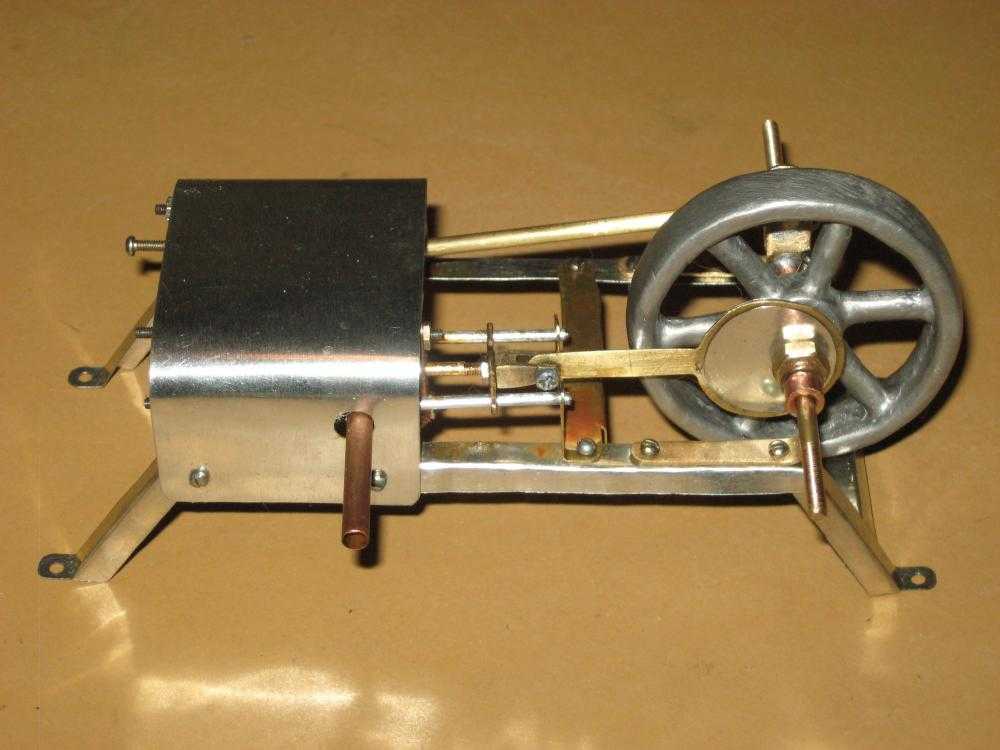
 На площадку ставим рабочий цилиндр и золотник. Выравниваем их положение, чтобы добиться оптимального хода поршней.
На площадку ставим рабочий цилиндр и золотник. Выравниваем их положение, чтобы добиться оптимального хода поршней.
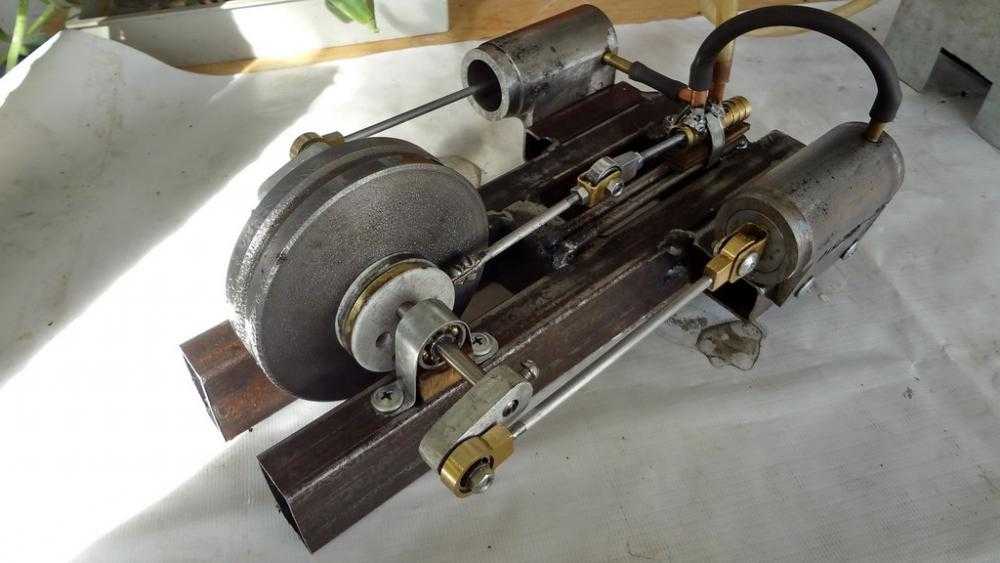 Ситуация требовала какого-то небольшого интенсивного проекта с паяльной лампой. Гум. Я решил сделать двигатель героя. Я сделал один в начальной школе из консервной банки и нескольких кусков резинового шланга. Все это висело на гусенице и питалось от свечи. Даже на полном ходу его тяга была почти незаметна. Теперь у меня был шанс сделать то, что действительно может работать.
Ситуация требовала какого-то небольшого интенсивного проекта с паяльной лампой. Гум. Я решил сделать двигатель героя. Я сделал один в начальной школе из консервной банки и нескольких кусков резинового шланга. Все это висело на гусенице и питалось от свечи. Даже на полном ходу его тяга была почти незаметна. Теперь у меня был шанс сделать то, что действительно может работать.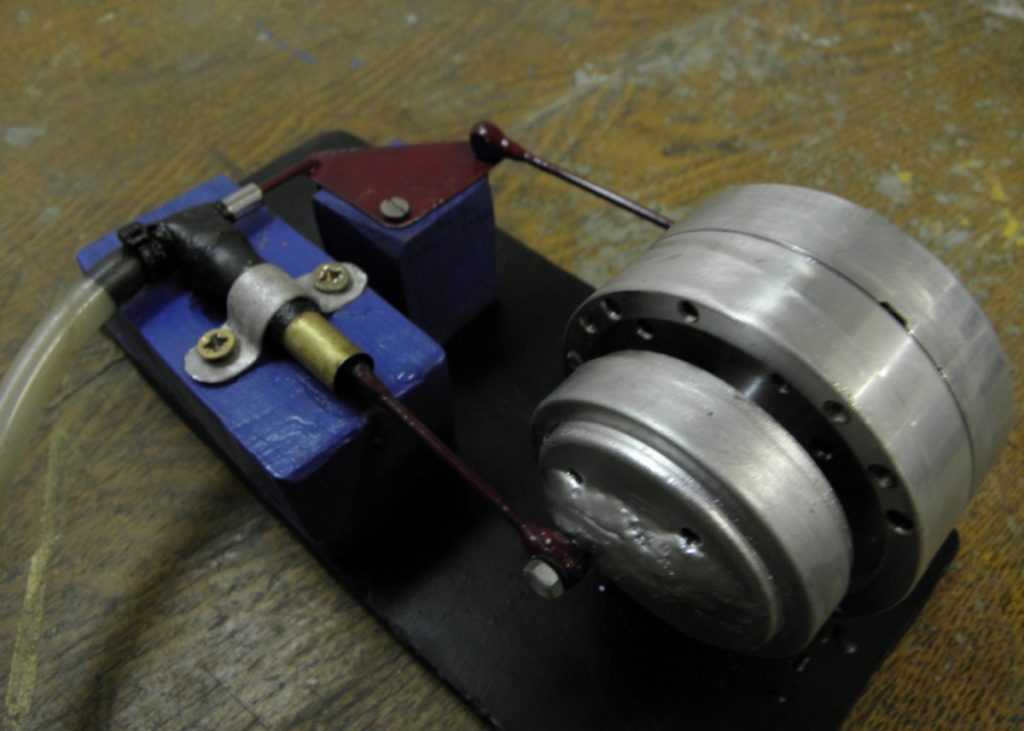
 Я сделал (как я позже узнал, это называлось) вертикальный жаротрубный котел, припаяв латунный лист и трубку серебром. Первоначально я брал пар из верхней части котла, но из-за долгого прохождения по довольно тонкой трубке большая его часть конденсировалась в котле, поэтому я провел трубу вниз через кипящую воду через дно котла. и обратно через пламя, чтобы дать ему дополнительный импульс тепла, прежде чем отправиться в паровую машину. По-видимому, настоящие паровые котлы иногда имеют подобный элемент, называемый пароперегревателем. Я также изолировал сам котел для большей эффективности, и теперь мой паровой двигатель работает на двух маленьких спиртовых факелах. (Или я могу запустить его, дуя в него.) Удивительно, что можно собрать с помощью нескольких ручных инструментов. У меня есть очень ранний фильм о паровой машине в действии, а также более поздние изображения. Живой пар — это веселое хобби, и есть несколько страниц, посвященных именно этой теме.
Я сделал (как я позже узнал, это называлось) вертикальный жаротрубный котел, припаяв латунный лист и трубку серебром. Первоначально я брал пар из верхней части котла, но из-за долгого прохождения по довольно тонкой трубке большая его часть конденсировалась в котле, поэтому я провел трубу вниз через кипящую воду через дно котла. и обратно через пламя, чтобы дать ему дополнительный импульс тепла, прежде чем отправиться в паровую машину. По-видимому, настоящие паровые котлы иногда имеют подобный элемент, называемый пароперегревателем. Я также изолировал сам котел для большей эффективности, и теперь мой паровой двигатель работает на двух маленьких спиртовых факелах. (Или я могу запустить его, дуя в него.) Удивительно, что можно собрать с помощью нескольких ручных инструментов. У меня есть очень ранний фильм о паровой машине в действии, а также более поздние изображения. Живой пар — это веселое хобби, и есть несколько страниц, посвященных именно этой теме. Я построил эту штуку в начале 1990-х годов, так что вы будете поражены тем, что на нее вообще есть какая-либо документация. Похоже, я изначально создал веб-страницу для этого в 2006 году.0001
Я построил эту штуку в начале 1990-х годов, так что вы будете поражены тем, что на нее вообще есть какая-либо документация. Похоже, я изначально создал веб-страницу для этого в 2006 году.0001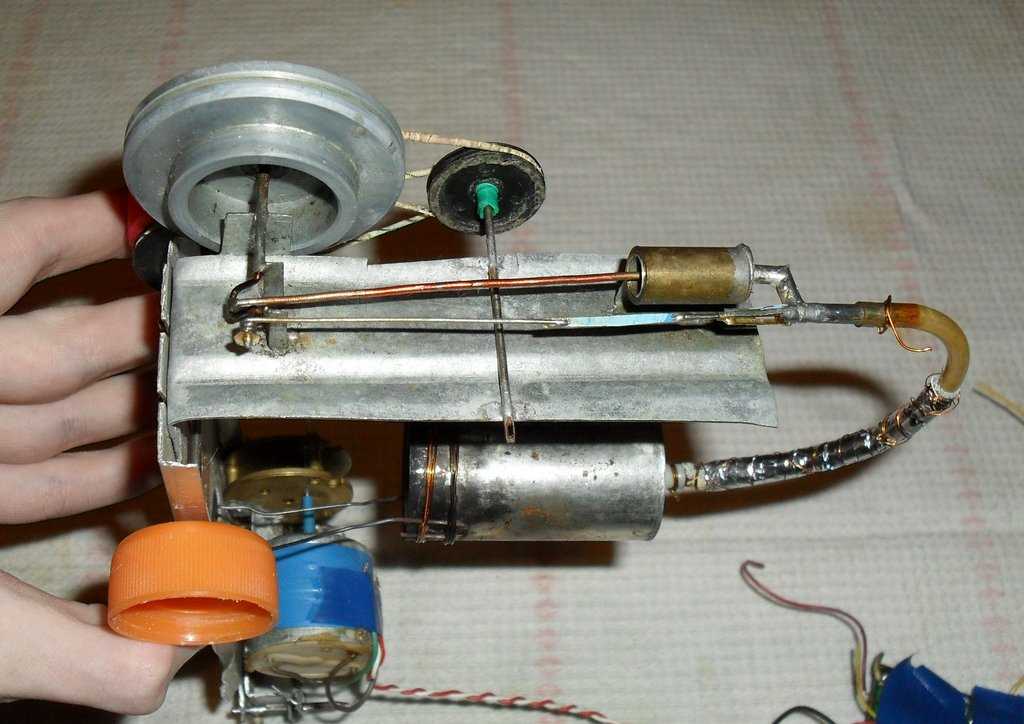 Большинство моделей можно приобрести в течение фиксированного периода времени, при этом комплекты будут поступать через регулярные промежутки времени, чтобы покупатель мог «строить так, как он/она покупает». Сборка и покраска вашей модели — это большое достижение, предмет гордости на долгие годы. Его можно было бы считать семейной реликвией, которая будет передана будущим поколениям. Мы полностью информируем наших нынешних и будущих клиентов, побуждая их задавать вопросы и участвовать в нашем популярном форуме Steam Traction World 9.0005
Большинство моделей можно приобрести в течение фиксированного периода времени, при этом комплекты будут поступать через регулярные промежутки времени, чтобы покупатель мог «строить так, как он/она покупает». Сборка и покраска вашей модели — это большое достижение, предмет гордости на долгие годы. Его можно было бы считать семейной реликвией, которая будет передана будущим поколениям. Мы полностью информируем наших нынешних и будущих клиентов, побуждая их задавать вопросы и участвовать в нашем популярном форуме Steam Traction World 9.0005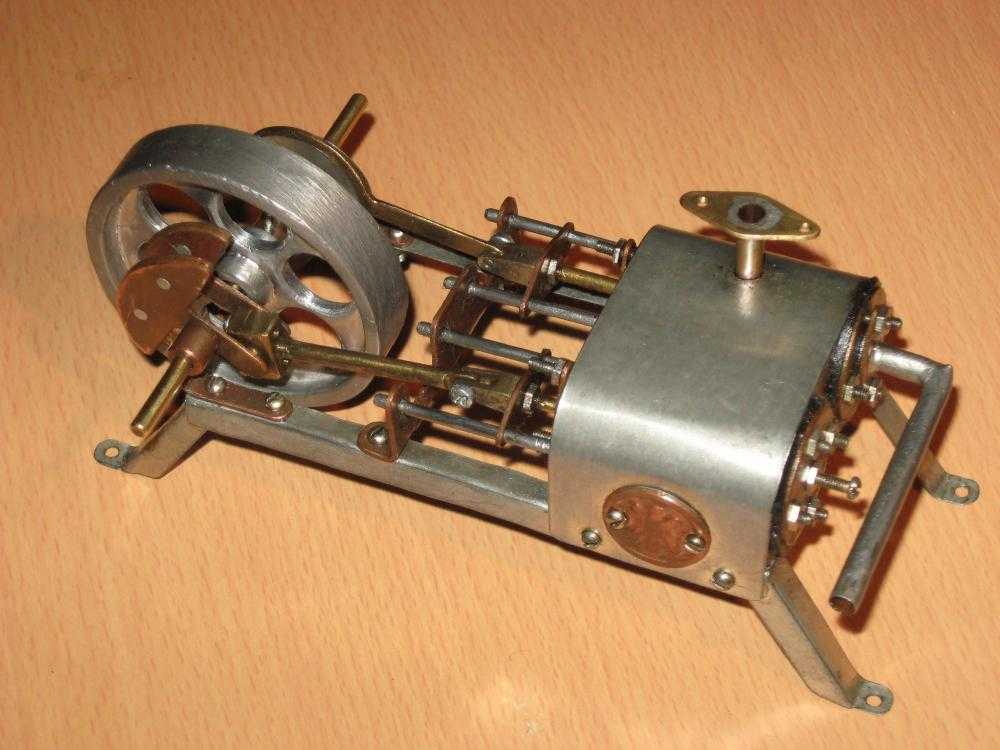 .. и мы думаем, что это выглядит потрясающе. (подробнее…)
.. и мы думаем, что это выглядит потрясающе. (подробнее…)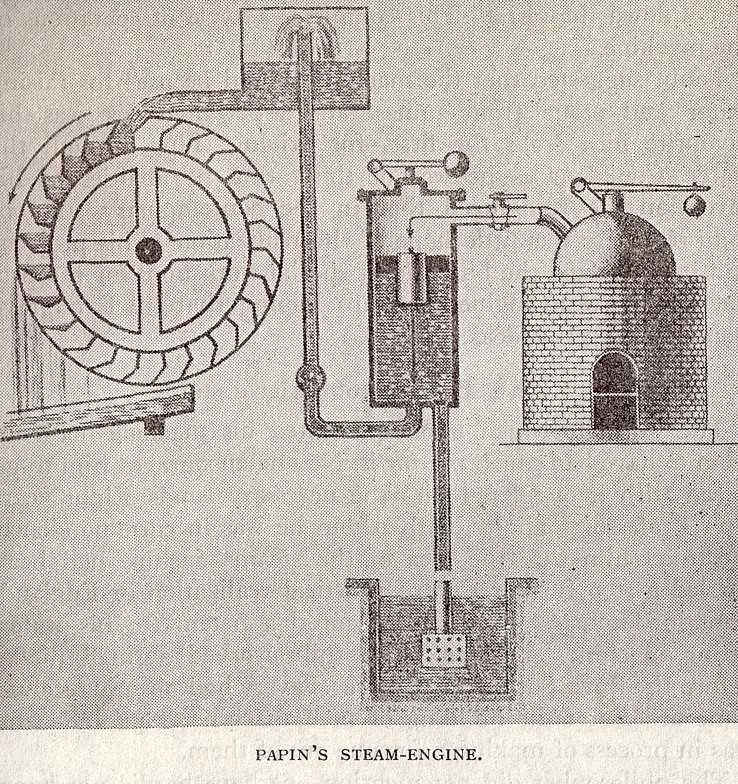 (подробнее…)
(подробнее…)
 Топливная пара «кислород-водород» – летающая бомба с массой проблем, но дающая максимальную возможную тягу.
Топливная пара «кислород-водород» – летающая бомба с массой проблем, но дающая максимальную возможную тягу.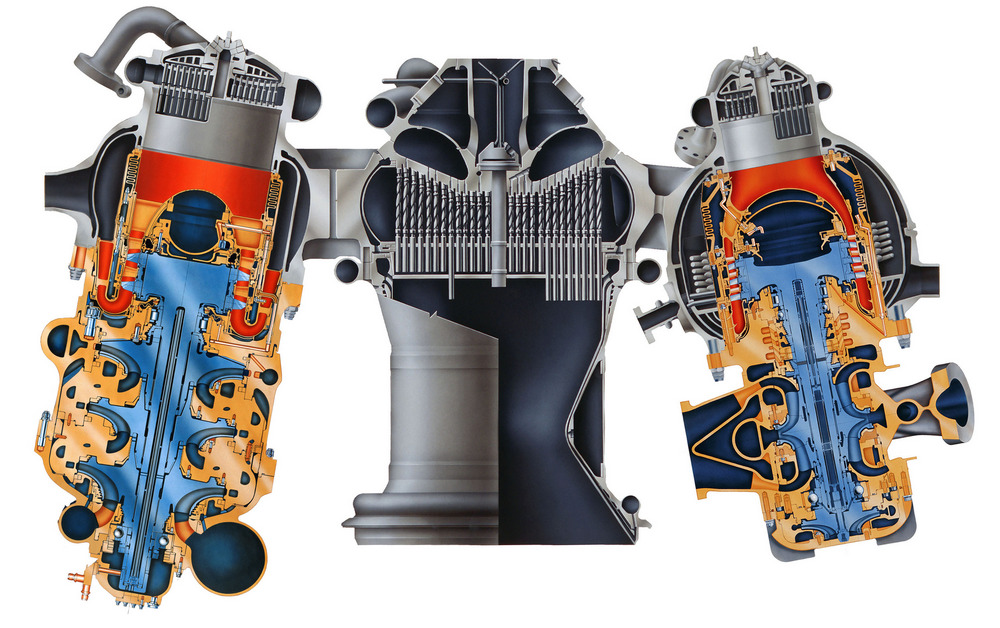
 И каждый раз испытания таких ракетных систем растягиваются на годы, а то и прекращаются. Снова вспоминают о двигателях, ранее испытанных и достают их из хранилища, чтобы успеть в срок реализовать обещанное.
И каждый раз испытания таких ракетных систем растягиваются на годы, а то и прекращаются. Снова вспоминают о двигателях, ранее испытанных и достают их из хранилища, чтобы успеть в срок реализовать обещанное. Для ГСО нагрузка будет составлять 25-30 т. Ракета с такими характеристиками может использоваться при организации межпланетных миссий.
Для ГСО нагрузка будет составлять 25-30 т. Ракета с такими характеристиками может использоваться при организации межпланетных миссий. ru
ru )
)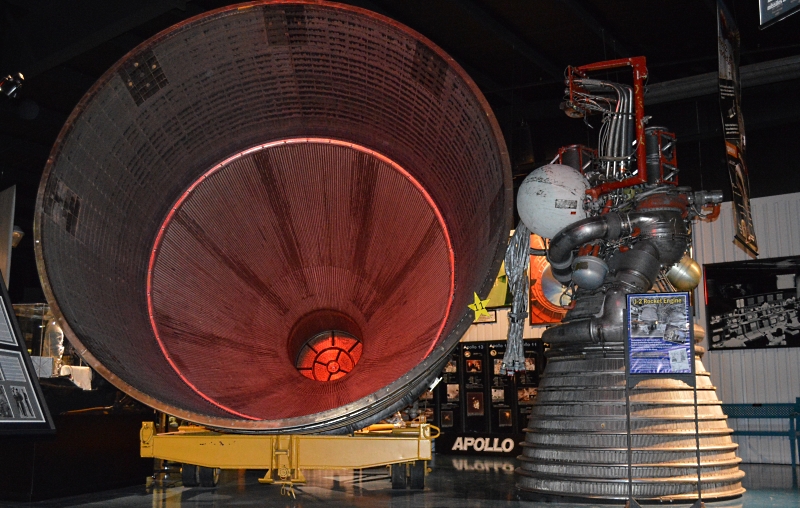 Эту чрезвычайно сложную технологию впервые разработали и использовали в СССР, в двигателе НК-15, созданном для сверхтяжелой ракеты Н-1 (все четыре её испытания закончились неудачей, проект был закрыт). Аналогичная схема применяется в РД-180, который великолепным назвал даже Илон Маск.
Эту чрезвычайно сложную технологию впервые разработали и использовали в СССР, в двигателе НК-15, созданном для сверхтяжелой ракеты Н-1 (все четыре её испытания закончились неудачей, проект был закрыт). Аналогичная схема применяется в РД-180, который великолепным назвал даже Илон Маск. Полная газификация задумывалась только в трех двигателях:
Полная газификация задумывалась только в трех двигателях: Чем она больше, тем больше топлива вместит топливный бак.
Чем она больше, тем больше топлива вместит топливный бак.
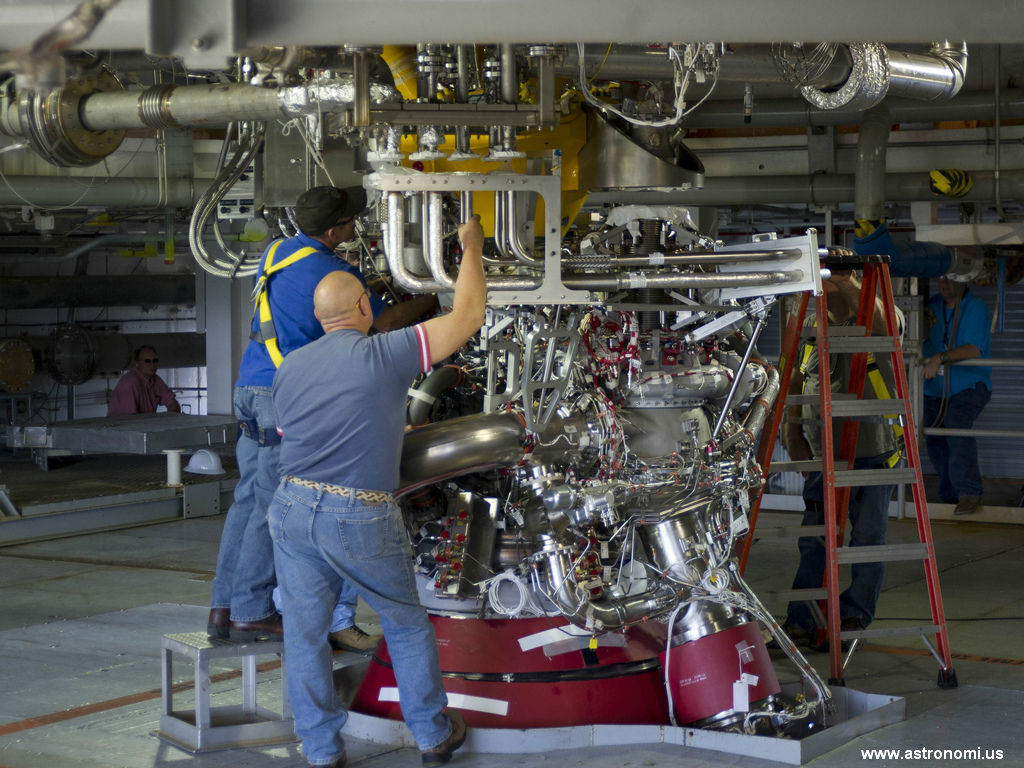 Почему же, в таком случае, некоторые производители ракет керосину предпочли метан или водород? Ответ кроется в миссиях, для которых эти ракеты, с заделом на будущее, предназначены — метан с водородом можно производить на Марсе. И соответственно не брать с собой топливо на обратную дорогу.
Почему же, в таком случае, некоторые производители ракет керосину предпочли метан или водород? Ответ кроется в миссиях, для которых эти ракеты, с заделом на будущее, предназначены — метан с водородом можно производить на Марсе. И соответственно не брать с собой топливо на обратную дорогу. 84 мН
84 мН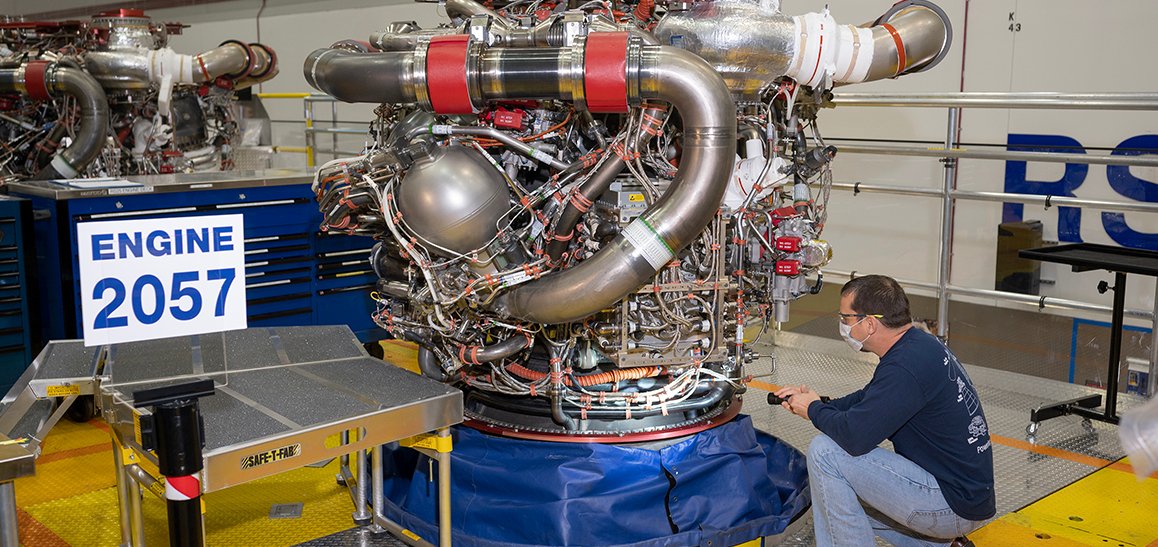 В таблице удельная тяга приводится в двух значениях, на уровне моря и в вакууме. В нашей таблице по тяговооруженности с большим отрывом от всех остальных двигателей лидирует Merlin, а по удельной тяге — RS-25.
В таблице удельная тяга приводится в двух значениях, на уровне моря и в вакууме. В нашей таблице по тяговооруженности с большим отрывом от всех остальных двигателей лидирует Merlin, а по удельной тяге — RS-25. 7 млн
7 млн
 Разницу в $30 млн предварительно будем считать наценкой за сложность. В перспективе, вероятно, цены второй ступени FH и Falcon 9 сравняются на уровне $30 млн, что составляет $1 млн за тонну (напомню, что полезная нагрузка FH с возвратом первой ступени составляет 30 т). Исходя из ресурса первой ступени (три ускорителя по цене $30 млн каждый) в 10 запусков, полная цена доставки на НОО одной тонны полезного груза ракетой FH составит (30×3)/10/30 + 1 = $1.3 млн (в т.ч. $90 тыс — за износ двигателей). Для сравнения, отправка на НОО 63.8 т полезного груза с потерей первой ступени ($150 млн) стоит $2.3 млн.
Разницу в $30 млн предварительно будем считать наценкой за сложность. В перспективе, вероятно, цены второй ступени FH и Falcon 9 сравняются на уровне $30 млн, что составляет $1 млн за тонну (напомню, что полезная нагрузка FH с возвратом первой ступени составляет 30 т). Исходя из ресурса первой ступени (три ускорителя по цене $30 млн каждый) в 10 запусков, полная цена доставки на НОО одной тонны полезного груза ракетой FH составит (30×3)/10/30 + 1 = $1.3 млн (в т.ч. $90 тыс — за износ двигателей). Для сравнения, отправка на НОО 63.8 т полезного груза с потерей первой ступени ($150 млн) стоит $2.3 млн. С учетом дополнительных сложностей её изготовления округлим эту сумму до $250 млн. Соответственно каждый из 50 запусков будет стоить $5 млн, а стоимость доставки груза на НОО составит $50 тыс за тонну. И вот это на рынке орбитальных запусков действительно станет революцией — если, конечно, сбудутся обещания SpaceX.
С учетом дополнительных сложностей её изготовления округлим эту сумму до $250 млн. Соответственно каждый из 50 запусков будет стоить $5 млн, а стоимость доставки груза на НОО составит $50 тыс за тонну. И вот это на рынке орбитальных запусков действительно станет революцией — если, конечно, сбудутся обещания SpaceX.
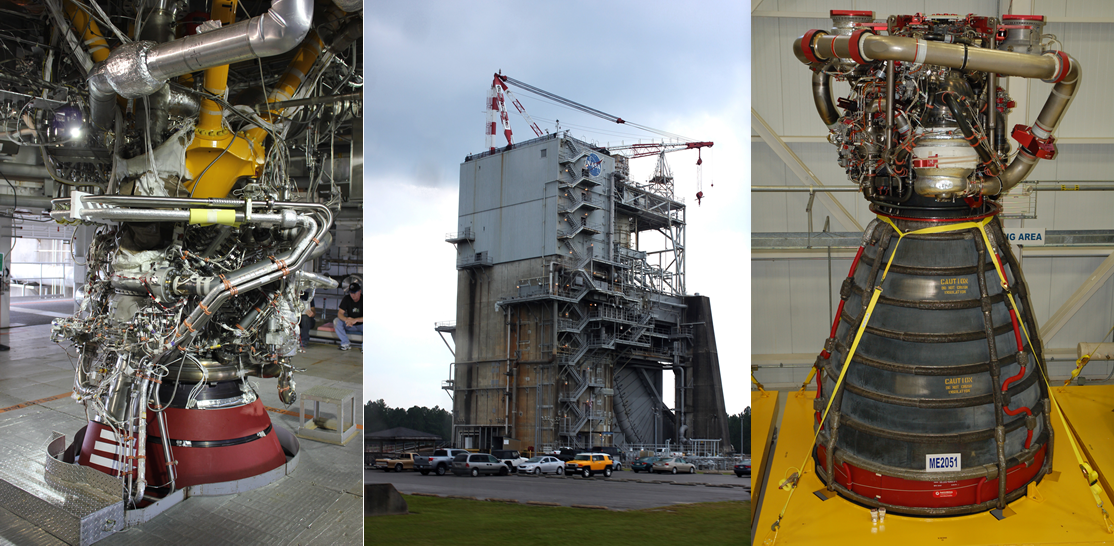
 прервать, но в общей сложности 46 РС-25 совершили 135 вылетов шаттлов до июля 2011 г., при этом примерно 99,95% успеха. Эти двигатели были значительно модифицированы за эти годы, получив сертификацию для работы на более высоких уровнях мощности, улучшенные сварные швы и функциональность главного инжектора, улучшенные турбонасосы и увеличенный срок службы.
прервать, но в общей сложности 46 РС-25 совершили 135 вылетов шаттлов до июля 2011 г., при этом примерно 99,95% успеха. Эти двигатели были значительно модифицированы за эти годы, получив сертификацию для работы на более высоких уровнях мощности, улучшенные сварные швы и функциональность главного инжектора, улучшенные турбонасосы и увеличенный срок службы. Созвездие
Созвездие
 По данным Aerojet Rocketdyne, 18 двигателей по-прежнему используют оптимизацию цепочки поставок и внедрение современных методологий, включая аддитивное производство. «Страна возвращается на Луну и продвигается вперед с планами по исследованию других направлений в дальнем космосе, включая Марс», — заявила генеральный директор и президент Aerojet Rocketdyne Эйлин Дрейк. «Этот контракт гарантирует, что наши проверенные в полете двигатели RS-25 будут использоваться на каждом этапе пути, поскольку НАСА успешно и безопасно достигает этих целей».
По данным Aerojet Rocketdyne, 18 двигателей по-прежнему используют оптимизацию цепочки поставок и внедрение современных методологий, включая аддитивное производство. «Страна возвращается на Луну и продвигается вперед с планами по исследованию других направлений в дальнем космосе, включая Марс», — заявила генеральный директор и президент Aerojet Rocketdyne Эйлин Дрейк. «Этот контракт гарантирует, что наши проверенные в полете двигатели RS-25 будут использоваться на каждом этапе пути, поскольку НАСА успешно и безопасно достигает этих целей».

 На каждом этапе инженеры внедряют новые компоненты в экспериментальные двигатели. Компоненты, протестированные в этой серии, включают недавно изготовленные турбонасосы, воздуховоды, жгуты и клапаны. Также будет включен ранее протестированный аккумулятор pogo. Аккумулятор pogo, изготовленный методом селективного лазерного плавления, гасит колебания давления топлива во время подъема транспортного средства.
На каждом этапе инженеры внедряют новые компоненты в экспериментальные двигатели. Компоненты, протестированные в этой серии, включают недавно изготовленные турбонасосы, воздуховоды, жгуты и клапаны. Также будет включен ранее протестированный аккумулятор pogo. Аккумулятор pogo, изготовленный методом селективного лазерного плавления, гасит колебания давления топлива во время подъема транспортного средства. Чтобы обеспечить качество работы, операторы будут сравнивать данные для современных компонентов двигателя, изготовленных с использованием новых технологий, с предыдущими данными для компонентов, разработанных с использованием более старых методов производства.
Чтобы обеспечить качество работы, операторы будут сравнивать данные для современных компонентов двигателя, изготовленных с использованием новых технологий, с предыдущими данными для компонентов, разработанных с использованием более старых методов производства.

 Кроме того, использование только электроэнергии при движении в городе может снизить расход топлива на 20%. Полным гибридом является автомобиль BMW X6 ActiveHybrid.
Кроме того, использование только электроэнергии при движении в городе может снизить расход топлива на 20%. Полным гибридом является автомобиль BMW X6 ActiveHybrid. Тогда они распространения не получили. Позднее по такой схеме строились (и строятся) тяжелые карьерные самосвалы. Представьте себе, какого размера должна быть коробка передач на мощном многотонном монстре? А кардан? А редуктор моста? Поэтому на таких машинах применяется схема дизель — электрохода. ДВС крутит генератор, тот, в свою очередь, питает тяговые электрические двигатели, на каждое ведущее колесо — свой. Это не что иное, как последовательный гибрид. Что такое «последовательный» и какие бывают еще гибриды — сейчас расскажем.
Тогда они распространения не получили. Позднее по такой схеме строились (и строятся) тяжелые карьерные самосвалы. Представьте себе, какого размера должна быть коробка передач на мощном многотонном монстре? А кардан? А редуктор моста? Поэтому на таких машинах применяется схема дизель — электрохода. ДВС крутит генератор, тот, в свою очередь, питает тяговые электрические двигатели, на каждое ведущее колесо — свой. Это не что иное, как последовательный гибрид. Что такое «последовательный» и какие бывают еще гибриды — сейчас расскажем. Если же использовать маломощный ДВС для подзарядки тяговой батареи, которую изначально зарядили «от розетки», то можно увеличить пробег автомобиля на одной зарядке. И такие типы гибридов существуют.
Если же использовать маломощный ДВС для подзарядки тяговой батареи, которую изначально зарядили «от розетки», то можно увеличить пробег автомобиля на одной зарядке. И такие типы гибридов существуют.:no_upscale()/imgs/2019/09/29/22/3586145/3e2208d66b837681d804e68600857a989668cecb.jpg) Электроника решает, кому и когда крутить колеса, когда и сколько времени заряжать батарею. Водителя все это не касается. Он управляет обычным автомобилем: газ, тормоз, коробка — автомат…
Электроника решает, кому и когда крутить колеса, когда и сколько времени заряжать батарею. Водителя все это не касается. Он управляет обычным автомобилем: газ, тормоз, коробка — автомат… А вот самостоятельно двигать авто электрическому двигателю не по силам. Это уже настоящий гибрид. Но первую скрипку по-прежнему играет двигатель внутреннего сгорания.
А вот самостоятельно двигать авто электрическому двигателю не по силам. Это уже настоящий гибрид. Но первую скрипку по-прежнему играет двигатель внутреннего сгорания. По сути это электромобили, которые везут зарядную станцию на базе небольшого ДВС. Они могут проехать пару — тройку сотен километров на заряде от розетки, а бензиновый мотор, подпитывая аккумулятор, позволяет увеличить этот пробег вдвое. Здесь то точно доминирует электрический двигатель.
По сути это электромобили, которые везут зарядную станцию на базе небольшого ДВС. Они могут проехать пару — тройку сотен километров на заряде от розетки, а бензиновый мотор, подпитывая аккумулятор, позволяет увеличить этот пробег вдвое. Здесь то точно доминирует электрический двигатель. Только рынку этого не надо. А если нет спроса, нет и предложения.
Только рынку этого не надо. А если нет спроса, нет и предложения.
 Лучшие умы, большие деньги и основные силы брошены на их совершенствование и продвижение. Если, в итоге, удастся создать аккумуляторную батарею, которая обеспечит гарантированный длительный пробег, быструю зарядку, стабильность работы при любой температуре, кому будет нужен более сложный и менее «зеленый» гибрид?
Лучшие умы, большие деньги и основные силы брошены на их совершенствование и продвижение. Если, в итоге, удастся создать аккумуляторную батарею, которая обеспечит гарантированный длительный пробег, быструю зарядку, стабильность работы при любой температуре, кому будет нужен более сложный и менее «зеленый» гибрид? Если вы не согласны или хотите получить дополнительную информацию, вы можете изменить настройки файлов cookie, нажав на предоставленную ссылку.
Если вы не согласны или хотите получить дополнительную информацию, вы можете изменить настройки файлов cookie, нажав на предоставленную ссылку. Они способны разогнать автомобиль до определенной скорости или до полной разрядки аккумулятора.
Они способны разогнать автомобиль до определенной скорости или до полной разрядки аккумулятора.
 В этой статье мы рассмотрим 4 основных типа гибридных автомобилей и опишем, что делает каждый из них уникальным.
В этой статье мы рассмотрим 4 основных типа гибридных автомобилей и опишем, что делает каждый из них уникальным.


 11 AliExpress снизил курс доллара на 3 рубля, а товары подешевели
11 AliExpress снизил курс доллара на 3 рубля, а товары подешевели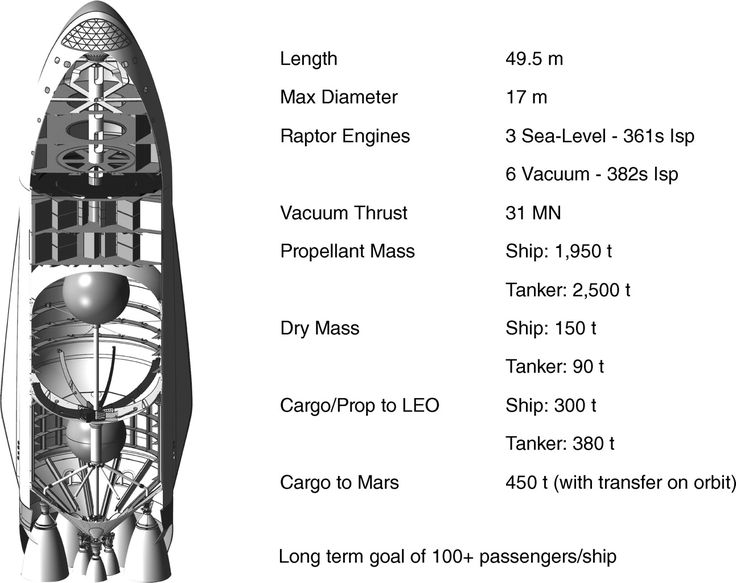 Как сообщается, во время праздничных дней в честь Дня благодарения основатель компании разослал работникам SpaceX официальное письмо, которое вскоре утекло в Сеть. Вначале его опубликовало не самое известное космическое медиа spaceexplored.com, позже подлинность сообщения подтвердил телеканал CNBC, который получил копию письма от своих источников.
Как сообщается, во время праздничных дней в честь Дня благодарения основатель компании разослал работникам SpaceX официальное письмо, которое вскоре утекло в Сеть. Вначале его опубликовало не самое известное космическое медиа spaceexplored.com, позже подлинность сообщения подтвердил телеканал CNBC, который получил копию письма от своих источников. ТАСС) — приезжайте. Нам понадобятся все силы, чтобы оправиться от того, что, откровенно говоря, надо назвать катастрофой.
ТАСС) — приезжайте. Нам понадобятся все силы, чтобы оправиться от того, что, откровенно говоря, надо назвать катастрофой. Спасибо, Илон».
Спасибо, Илон». Для этого требуется «созвездие» из большого количества спутников (более 10 тыс. штук) — проект Starlink начал активно покупать пусковые услуги у SpaceX, а там смогли пустить часть денег на разработку Starship. Это упрощенная схема, в реальности денежные потоки распределяются гораздо сложнее.
Для этого требуется «созвездие» из большого количества спутников (более 10 тыс. штук) — проект Starlink начал активно покупать пусковые услуги у SpaceX, а там смогли пустить часть денег на разработку Starship. Это упрощенная схема, в реальности денежные потоки распределяются гораздо сложнее.

 с., соединенным болтами с 10-ступенчатой автоматической коробкой передач, и останутся таковыми в 2023 году. версия 5,2-литрового V-8 с наддувом Mustang Shelby GT500, который, наконец, придаст 702-сильному Ram TRX что-то устрашающее, чтобы фыркнуть. В то время как R стандартно поставляется с 37-дюймовыми шинами BFGoodrich K02, стандартная резина для моделей с твин-турбо V-6 имеет размеры 35 дюймов, но 37-е не являются обязательными. Несмотря на огромные размеры Raptor, у него один из самых плавных ходов среди полноразмерных пикапов. Эта длинноходная подвеска, которая специально разработана для поглощения ударов, провалов и прыжков на скоростном бездорожье, удивительно мягкая и прощает ежедневные выбоины и бугристый тротуар. Если оставить в стороне скалы и дюны, установка этого F-150 размера XXL на узкой дороге или на парковочном месте вполне может стать самым большим препятствием для Raptor.
с., соединенным болтами с 10-ступенчатой автоматической коробкой передач, и останутся таковыми в 2023 году. версия 5,2-литрового V-8 с наддувом Mustang Shelby GT500, который, наконец, придаст 702-сильному Ram TRX что-то устрашающее, чтобы фыркнуть. В то время как R стандартно поставляется с 37-дюймовыми шинами BFGoodrich K02, стандартная резина для моделей с твин-турбо V-6 имеет размеры 35 дюймов, но 37-е не являются обязательными. Несмотря на огромные размеры Raptor, у него один из самых плавных ходов среди полноразмерных пикапов. Эта длинноходная подвеска, которая специально разработана для поглощения ударов, провалов и прыжков на скоростном бездорожье, удивительно мягкая и прощает ежедневные выбоины и бугристый тротуар. Если оставить в стороне скалы и дюны, установка этого F-150 размера XXL на узкой дороге или на парковочном месте вполне может стать самым большим препятствием для Raptor. -150 Raptor
-150 Raptor США
США с. 6. Он дышит через новую 3,0-дюймовую выхлопную систему, которая, как сообщается, усиливает саундтрек V-6 грузовика. Двигатель по-прежнему сочетается с 10-ступенчатой автоматической коробкой передач с подрулевыми лепестками, которая питает все четыре колеса через стандартную систему полного привода. Если вам этого недостаточно, просто подождите. Raptor R — еще более крупный хищник. Он использует 700-сильную версию 5,2-литрового V-8 с наддувом от Shelby GT500, но с крутящим моментом 640 фунт-футов. Каждый Raptor оснащен сложной подвеской, которая включает в себя более крупные амортизаторы внутреннего байпаса и пятирычажную заднюю спиральную пружину. 9Версия 0023, которую мы тестировали. Модель продемонстрировала невероятную тягу и плавность хода грузовика даже на самой сложной местности. Наряду с другими улучшениями шасси, набором 17-дюймовых колесных дисков и стандартным набором 35-дюймовых шин, Raptor также доступен с комплектом 37-дюймовых вездеходных шин BFGoodrich для улучшения углов въезда, выезда и отрыва.
с. 6. Он дышит через новую 3,0-дюймовую выхлопную систему, которая, как сообщается, усиливает саундтрек V-6 грузовика. Двигатель по-прежнему сочетается с 10-ступенчатой автоматической коробкой передач с подрулевыми лепестками, которая питает все четыре колеса через стандартную систему полного привода. Если вам этого недостаточно, просто подождите. Raptor R — еще более крупный хищник. Он использует 700-сильную версию 5,2-литрового V-8 с наддувом от Shelby GT500, но с крутящим моментом 640 фунт-футов. Каждый Raptor оснащен сложной подвеской, которая включает в себя более крупные амортизаторы внутреннего байпаса и пятирычажную заднюю спиральную пружину. 9Версия 0023, которую мы тестировали. Модель продемонстрировала невероятную тягу и плавность хода грузовика даже на самой сложной местности. Наряду с другими улучшениями шасси, набором 17-дюймовых колесных дисков и стандартным набором 35-дюймовых шин, Raptor также доступен с комплектом 37-дюймовых вездеходных шин BFGoodrich для улучшения углов въезда, выезда и отрыва. Raptor R еще не был сертифицирован EPA. Как только у нас появится возможность протестировать один из них на нашем шоссе со скоростью 75 миль в час, мы сможем оценить его реальные мили на галлон. Для получения дополнительной информации об экономии топлива Raptor посетите веб-сайт EPA . Для получения дополнительной информации об экономии топлива F-150 Raptor посетите веб-сайт 9.0023 веб-сайт EPA .
Raptor R еще не был сертифицирован EPA. Как только у нас появится возможность протестировать один из них на нашем шоссе со скоростью 75 миль в час, мы сможем оценить его реальные мили на галлон. Для получения дополнительной информации об экономии топлива Raptor посетите веб-сайт EPA . Для получения дополнительной информации об экономии топлива F-150 Raptor посетите веб-сайт 9.0023 веб-сайт EPA . Наряду со стандартной алюминиевой внутренней отделкой, Raptor доступен с дополнительными элементами интерьера из углеродного волокна и более агрессивными передними ковшами Recaro. Высоколетящий пикап больше не будет предлагаться с удлиненной кабиной (также известной как SuperCab). По крайней мере, версия кабины экипажа SuperCrew предлагает больше места на заднем сиденье. Он сочетается с 5,5-футовым грузовым ящиком.
Наряду со стандартной алюминиевой внутренней отделкой, Raptor доступен с дополнительными элементами интерьера из углеродного волокна и более агрессивными передними ковшами Recaro. Высоколетящий пикап больше не будет предлагаться с удлиненной кабиной (также известной как SuperCab). По крайней мере, версия кабины экипажа SuperCrew предлагает больше места на заднем сиденье. Он сочетается с 5,5-футовым грузовым ящиком. Те, кто хочет улучшить качество звука, могут выбрать звуковую систему B&O с 18 динамиками. Raptor также может быть оснащен полезным мобильным генератором мощностью 2,0 кВт, который установлен в грузовой платформе и может работать с электроинструментами и другим оборудованием.
Те, кто хочет улучшить качество звука, могут выбрать звуковую систему B&O с 18 динамиками. Raptor также может быть оснащен полезным мобильным генератором мощностью 2,0 кВт, который установлен в грузовой платформе и может работать с электроинструментами и другим оборудованием. Ключевые функции безопасности должны включать:
Ключевые функции безопасности должны включать: США/78 545 долл. США
США/78 545 долл. США 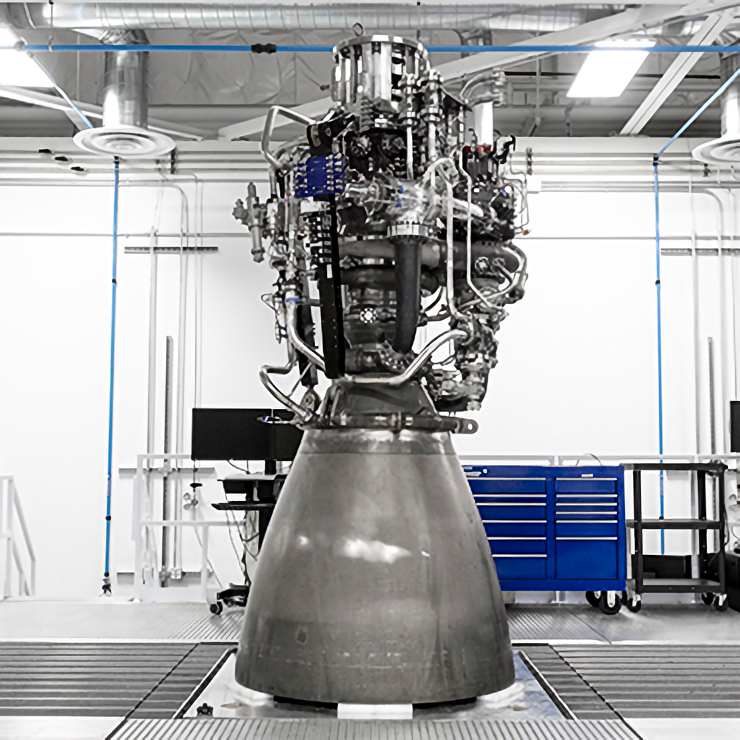
 с. при 5850 об/мин
с. при 5850 об/мин  5/10
5/10 Поклонники Твиттера видят далеков.
Поклонники Твиттера видят далеков. twitter.com/9ixxXXceG326 апреля 2022 г.
twitter.com/9ixxXXceG326 апреля 2022 г. co/GGV7gY3lec 26 апреля 2022 г.
co/GGV7gY3lec 26 апреля 2022 г. (Изображение предоставлено SpaceX)
(Изображение предоставлено SpaceX)

 Провести такую проверку можно на СТО.
Провести такую проверку можно на СТО. В любом случае все манипуляции должны осуществляться человеком, который точно знает, что необходимо делать, учитывает марку, год выпуска, пробег автомобиля.
В любом случае все манипуляции должны осуществляться человеком, который точно знает, что необходимо делать, учитывает марку, год выпуска, пробег автомобиля. Если он не может прогреться и не поднимается температура двигателя, то подается переобогащенная смесь.
Если он не может прогреться и не поднимается температура двигателя, то подается переобогащенная смесь. Поэтому рекомендуется заливать только качественное масло в мотор перед зимой.
Поэтому рекомендуется заливать только качественное масло в мотор перед зимой.
 А именно — прогреваем мы не столько сам двигатель, сколько жидкость в системе охлаждения. Именно её температура является главным показателем, влияющим и на наш комфорт, и на расход топлива, и на стабильность работы силового агрегата. Соответственно, любые проблемы с долгим прогревом (как и с перегревом) всегда связаны с неисправностями или особенностями работы системы охлаждения.
А именно — прогреваем мы не столько сам двигатель, сколько жидкость в системе охлаждения. Именно её температура является главным показателем, влияющим и на наш комфорт, и на расход топлива, и на стабильность работы силового агрегата. Соответственно, любые проблемы с долгим прогревом (как и с перегревом) всегда связаны с неисправностями или особенностями работы системы охлаждения. Соответственно, чем выше обороты, тем больше антифриза она перегоняет.
Соответственно, чем выше обороты, тем больше антифриза она перегоняет.
 Если машина, например, стоит в пробке, и набегающего потока воздуха нет, антифриз в радиаторе охлаждается принудительно за счёт вентилятора. Он включается автоматически по сигналу датчика при температуре 100…110 градусов по Цельсию.
Если машина, например, стоит в пробке, и набегающего потока воздуха нет, антифриз в радиаторе охлаждается принудительно за счёт вентилятора. Он включается автоматически по сигналу датчика при температуре 100…110 градусов по Цельсию.
 Чтобы дизель выдерживал эти нагрузки, его детали делаются более массивными, чем в бензиновых ДВС. А чем массивнее детали, тем дольше они прогреваются.
Чтобы дизель выдерживал эти нагрузки, его детали делаются более массивными, чем в бензиновых ДВС. А чем массивнее детали, тем дольше они прогреваются. На самом же деле мотор может работать в нормальных температурных режимах. Просто на панели приборов этого не видно.
На самом же деле мотор может работать в нормальных температурных режимах. Просто на панели приборов этого не видно. Но из-за того, что он засорён, отобрать и перенести это тепло в салон не получается.
Но из-за того, что он засорён, отобрать и перенести это тепло в салон не получается. В инжекторах за это отвечает ЭБУ, который ориентируется на датчики (ДТ, ДМРВ, ДТОЖ) и отдаёт соответствующие команды на клапан холостого хода (КХХ).
В инжекторах за это отвечает ЭБУ, который ориентируется на датчики (ДТ, ДМРВ, ДТОЖ) и отдаёт соответствующие команды на клапан холостого хода (КХХ). Дополнительные симптомы — дует еле тёплым печка, часто включается вентилятор радиатора, стрелка на панели приборов ведёт себя иногда неадекватно.
Дополнительные симптомы — дует еле тёплым печка, часто включается вентилятор радиатора, стрелка на панели приборов ведёт себя иногда неадекватно. Термостат отчасти для того и придуман, чтобы заблокировать для непрогретой охлаждающей жидкости путь к радиатору. В свою очередь, это простое решение позволяет поддерживать оптимальные температурные условия для двигателя, при которых он работает экономичнее, стабильнее и дольше.
Термостат отчасти для того и придуман, чтобы заблокировать для непрогретой охлаждающей жидкости путь к радиатору. В свою очередь, это простое решение позволяет поддерживать оптимальные температурные условия для двигателя, при которых он работает экономичнее, стабильнее и дольше. Третий способ — «кипячение» термостата в кастрюле с градусником с целью определить точно, как он себя ведёт, и при каких температурах.
Третий способ — «кипячение» термостата в кастрюле с градусником с целью определить точно, как он себя ведёт, и при каких температурах. Проверить его очень просто. Для этого надо измерить фактическую температуру охлаждающей жидкости. Приборы можно использовать самые разные — мультиметр с термопарой, пирометр, тепловизор… Если стрелка на приборной панели показывает то, что далеко от действительности, значит датчик температуры вышел из строя, и его следует заменить.
Проверить его очень просто. Для этого надо измерить фактическую температуру охлаждающей жидкости. Приборы можно использовать самые разные — мультиметр с термопарой, пирометр, тепловизор… Если стрелка на приборной панели показывает то, что далеко от действительности, значит датчик температуры вышел из строя, и его следует заменить. Начинать надо всегда с последнего — КХХ можно попробовать почистить, проверить напряжения на его клеммах, либо заменить на заведомо исправный. Подойдёт даже такой нехороший способ, при котором в магазине покупается новый КХХ, аккуратно устанавливается и, если ничего не поменялось — сдаётся обратно, с понтом, что не подошёл…
Начинать надо всегда с последнего — КХХ можно попробовать почистить, проверить напряжения на его клеммах, либо заменить на заведомо исправный. Подойдёт даже такой нехороший способ, при котором в магазине покупается новый КХХ, аккуратно устанавливается и, если ничего не поменялось — сдаётся обратно, с понтом, что не подошёл…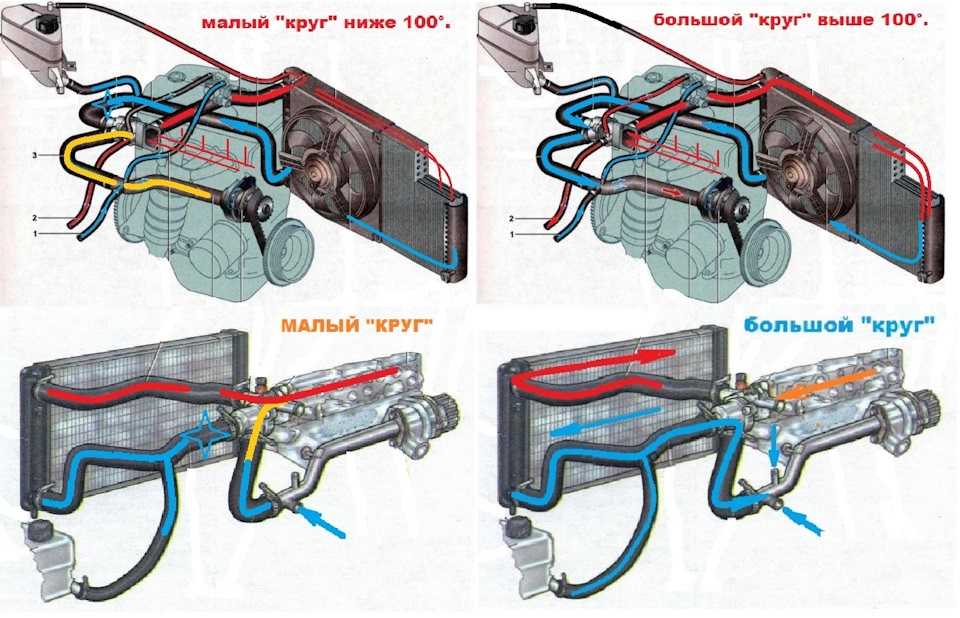 Она может быть как на расширительном бачке, так и на основном радиаторе. Далее с горловины скручивается крышка (безопаснее, когда мотор холодный), двигатель запускается, немного прогревается, и должен поработать несколько минут, включая принудительное повышение оборотов. Последнее нужно для того, чтобы увеличить эффективность помпы, и с большей вероятностью протолкнуть все воздушные пузыри к расширительному бачку. Следите за уровнем охлаждающей жидкости, доливая её при необходимости.
Она может быть как на расширительном бачке, так и на основном радиаторе. Далее с горловины скручивается крышка (безопаснее, когда мотор холодный), двигатель запускается, немного прогревается, и должен поработать несколько минут, включая принудительное повышение оборотов. Последнее нужно для того, чтобы увеличить эффективность помпы, и с большей вероятностью протолкнуть все воздушные пузыри к расширительному бачку. Следите за уровнем охлаждающей жидкости, доливая её при необходимости. Во время прогрева добавляйте оборотов педалью газа. Но не газуйте, как гонщики перед стартом, а просто поддерживайте обороты на стабильных 1100…1200 оборотах, периодически сбрасывая на минимальный ход. Этот метод очень помогает ускорить прогрев двигателя, а также повышает значительно эффективность системы смазки ДВС.
Во время прогрева добавляйте оборотов педалью газа. Но не газуйте, как гонщики перед стартом, а просто поддерживайте обороты на стабильных 1100…1200 оборотах, периодически сбрасывая на минимальный ход. Этот метод очень помогает ускорить прогрев двигателя, а также повышает значительно эффективность системы смазки ДВС. То есть, если вы запустите мотор, и сразу же включите вентилятор печки на средние или максимальные обороты, теплее в машине не станет, и конденсат со стёкол не уйдёт, а вот двигатель прогреваться будет дольше на 30…40%.
То есть, если вы запустите мотор, и сразу же включите вентилятор печки на средние или максимальные обороты, теплее в машине не станет, и конденсат со стёкол не уйдёт, а вот двигатель прогреваться будет дольше на 30…40%.
 Но это миф. В этом нет необходимости, и во многих штатах сейчас действуют законы против холостого хода, чтобы удержать людей от этой привычки.
Но это миф. В этом нет необходимости, и во многих штатах сейчас действуют законы против холостого хода, чтобы удержать людей от этой привычки. Если вы ждете пять минут, пока двигатель «прогреется», в ваш двигатель закачивается дополнительный бензин — без всякой причины.
Если вы ждете пять минут, пока двигатель «прогреется», в ваш двигатель закачивается дополнительный бензин — без всякой причины.

 Если нет, держите носок, наполненный кошачьим туалетом, рядом с лобовым стеклом, чтобы впитать лишнюю влагу.
Если нет, держите носок, наполненный кошачьим туалетом, рядом с лобовым стеклом, чтобы впитать лишнюю влагу.


 США
США Если ветровое стекло нуждается в очистке, нет сомнений, что небольшое количество тепла облегчит работу. И все же, кроме земных благ, зачем прогревать машину?
Если ветровое стекло нуждается в очистке, нет сомнений, что небольшое количество тепла облегчит работу. И все же, кроме земных благ, зачем прогревать машину? Прогрев вашего автомобиля — это пустая трата топлива, генерация чрезмерных выбросов, которые никуда не приведут.
Прогрев вашего автомобиля — это пустая трата топлива, генерация чрезмерных выбросов, которые никуда не приведут. Для смазки, работы гидравлики и испарения топлива достаточно одной-двух минут, чтобы начать движение. Увеличение времени прогрева до пяти минут на самом деле не сильно согревает, но может облегчить очистку ветрового стекла. Чтобы согреться, оденьтесь по погоде и помните, что соскабливания — хорошее упражнение.
Для смазки, работы гидравлики и испарения топлива достаточно одной-двух минут, чтобы начать движение. Увеличение времени прогрева до пяти минут на самом деле не сильно согревает, но может облегчить очистку ветрового стекла. Чтобы согреться, оденьтесь по погоде и помните, что соскабливания — хорошее упражнение.